Embed Size (px)
DESCRIPTION
京大岡山 3.8m 望遠鏡 分割鏡制御に用いる アクチュエータの特性評価. 京都大学大学院 理学研究科 宇宙物理学教室 長友 竣 、木野 勝. 制御対象と目標. 1/11. 制御対象 ・・・セグメント鏡 18枚 エッジ センサ 60 個 1 秒間に~ 100 回の アクチュエータ 54 個 フィードバック 目標 重力変形 熱変形 < 50nm に抑制 風による変形 (~ 数 Hz) → アクチュエータの特性をモデル化. 評価対象. 2/11. LAH-46-1002-F-L (ハーモニック・ドライブ・システムズ社) - PowerPoint PPT Presentation
Citation preview

京大岡山 3.8m 望遠鏡分割鏡制御に用いる
アクチュエータの特性評価
京都大学大学院 理学研究科宇宙物理学教室
長友 竣、木野 勝

制御対象と目標
制御対象・・・セグメント鏡 18 枚 エッジセンサ 60 個 1 秒間に~ 100回の アクチュエータ 54 個 フィードバック
目標 重力変形 熱変形 <50nm に抑制 風による変形 (~ 数 Hz)
→ アクチュエータの特性をモデル化
1/11

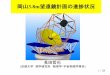
評価対象LAH-46-1002-F-L
(ハーモニック・ドライブ・システムズ社)DC モーター / ロータリーエンコーダ / ボールねじ
動作の数式モデル
2/11
電磁力の係数
摩擦の係数
粘性の係数
: モータの回転角度: コイル電流
tt
DCtBitt
d
d
d
d2
2
t ti

ステップ応答測定3/11
ステップ電流応答を振幅を変えて測定 動作可能な最小電流値摩擦 vs 電磁力 粘性による動作の時定数
測定条件- 波形 : 3 値矩形波- 電流振幅 : 0.4, 0.3, 0.2, 0.1, 0.05, 0.025 A
- 周期 : 4 秒- 繰り返し回数 : 10 回
1s

測定システム
任意波形発生器
直流モーター
変位センサ
電流計電圧 電流−変換回路
1k サンプル / 秒 で計測
4/11
ロータリーエンコーダ
tt
DCtBitt
d
d
d
d2
2
t ti

測定結果
0
-4000
4000
角速度
[rad/s]
0 20 40経過時間 [sec]
5/11
0
-4000 1
エンコー
ダ角度
[rad]
i ~ 0.4A
2 3 20

フィッティング
角速度
[ra
d/s]
経過時間 [sec]
0.4A 13 回目の動作
0 1.00.2
6/11
tDCtttiBtt
dd
d
-4000
0
電磁力の係数 B 摩擦の係数 C 粘性の係数 D 最小二乗法を用いて 1 回の動作ごとに フィッティング

最小駆動電流
]A[100.22.1 -15B
4100.32.1 CB
[Nm
/A]
|C| [N
m]0
0
2.5×105
2.5×104
0.4A 0.3A 0.2A
0.4A 0.3A 0.2A
n 回目の動作
0 202020 00
電磁力の係数 B
電磁力 ≥ 摩擦Bi0 ≥∣C∣
電磁力 摩擦力
i0≥0.10±0.02[A]
摩擦力の係数 C
7/11

動作の時定数
粘性の係数
D [N
ms/rad]
0
-25
n 回目の動作
粘性の係数
粘性による速度変化の時定数
0 202020 00
0.4A 0.3A 0.2A
8/11
目標の制御帯域 ~ 10HzFeedback 周波数 ~ 100Hz
sec/rad412D
sec08.01
D
T

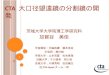
摩擦の詳細測定9/11
最小駆動電流~ 0.1A 周辺を詳細に測定測定システムは先程と同じ
・入力電流 : 2 値矩形波• 周波数 : 0.5Hz
• 振幅 : 25 ~ 125mA
・定常状態に達したあとの速度 ( 終端速度 ) を測定

最大静止摩擦の測定
86mA
10μm/sec のジャンプ
センサの読出し周期 ~1 0msec
100nm のオーバーシュート
10/11

まとめと今後の展望11/11
アクチュエータのステップ電流応答から 動作モデルを推定
時定数 : 0.08 sec最小駆動電流 : 86 mA
i=86mA で 10μm/sec の速度ジャンプ → 100nm のオーバーシュートは不可避?
今後、アクチュエータの周波数応答測定 →システム同定・パラメータ決定
要求性能を満たす制御システムが構築可能か
検討