Embed Size (px)
DESCRIPTION
Основы построения БЭВМ. Лекция 2 , вторая часть ( 2 часа) Управление работой процессора. 2.8. Состояния процессора. Процессор z/Architecture может находиться в одном из четырех взаимоисключающих состояний: СТОП - команды и прерывания (кроме прерывания для рестарта) не выполняются. - PowerPoint PPT Presentation
Citation preview

Основы построения БЭВМ
Лекция 2, вторая часть (2 часа)
Управление работой процессора

2.8. Состояния процессораПроцессор z/Architecture может находиться в одном из
четырех взаимоисключающих состояний:
• СТОП - команды и прерывания (кроме прерывания для рестарта) не выполняются.
• РАБОТА - команды и прерывания исполняются в соответствии с управляющими кодами в слове состояния программы, управляющих регистрах и режимом, заданным оператором.
• ЗАГРУЗКА - состояние устанавливается в процессе первоначальной загрузки в соответствии с ESA/390.
• СБОЙ - переход в это состояние вызывается машинными сбоями, выявленными в процессе функционирования процессора.

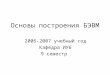
Состояния процессора и условия переходов Следую
щее состояни
е
ЗАГРУЗКА
СТОП РАБОТА СБОЙ
Исходное
состояни
е
ЗАГРУЗКА
Пошаговый режим Непрерывный режим
Сбой оборудования
СТОП
Переключатели загрузки
Переключатель рестарта, приказ запуска в команде SYGNAL PROCESSOR
РАБОТА
Переключатели сброса процессора, приказ "Стоп" в команде SYGNAL PROCESSOR, завершение шага в пошаговом режиме работы, останов по совпадению адресов
СБОЙ - Сброс -

Слово состояния программы PSW
Текущее слово состояния программы PSW, как и управляющие регистры, содержит информацию, необходимую для управления процессом исполнения команд программы.
Форматы PSW:- для z/Architecture 128 бит- для предшествующей ей архитектуры
ESA/390 64 бита

Внешнее управление
Предусмотрено пять инициируемых извне функций процессора: – сброс процессора; – начальный сброс процессора; – сброс подсистемы; – сброс с очисткой; – сброс по питанию.

Сброс процессора• Сброс процессора обеспечивает очистку указателей сбоев
оборудования и устраняет неопределенность состояния процессора, возникающую в результате таких сбоев, в том числе путем сохранения состояния для последующего анализа и восстановления. Сброс процессора обеспечивает:
• прекращение выполнения текущей команды или других действий, например прерываний;
• сброс всех условий прерываний, кроме внешних плавающих прерываний;
• все предварительно выбранные команды и операнды, а также подготовленные для записи в память результаты сбрасываются;
• очищаются строки буферов ALB, TLB; • если сброс вызван переключателем "загрузка - нормальная"
любого из процессоров конфигурации, устанавливается режим архитектуры ESA/390, текущее PSW трансформируется в формат ESA/390, сохраняется для последующего восстановления режима z/Architecture по команде SIGNAL PROCESSOR.

Начальный сброс процессора
Начальный сброс процессора включает операции сброса процессора с последующими дополнительными операциями очистки и инициализации:
• если сброс вызван переключателем "загрузка - нормальная", в данном процессоре и во всех процессорах конфигурации устанавливается режим архитектуры ESA/390;
• содержимое текущего PSW, старого PSW, регистров префикса, таймера CP, компаратора времени, программируемого регистра TOD и регистра управления операциями с ПТ устанавливается в 0;
• в управляющих регистрах устанавливаются начальные состояния, соответствующие режиму z/Architecture.

Сброс подсистемы
Сброс подсистемы предназначен для тех элементов конфигурации, которые не являются процессорами, путем выполнения следующих действий:
• в канальной подсистеме выполняется сброс системы ввода-вывода, включая сброс прерываний ввода-вывода и передачу системного сброса в устройства ввода-вывода;
• сбрасываются плавающие прерывания в конфигурации.

Сброс с очисткой
Сброс с очисткой объединяет операции начального сброса процессора со следующими операциями инициализации:
• во всех процессорах конфигурации устанавливается режим архитектуры ESA/390;
• регистры общего назначения, регистры с плавающей точкой, регистры доступа устанавливаются в 0;
• содержимое основной памяти в конфигурации и соответствующие ключи памяти обнуляются;
• блокировки, применяемые в любом процессоре конфигурации при исполнении команды PERFORM LOCKED OPERATION, отменяются;
• выполняется сброс подсистемы.

Сброс по питанию
Сброс по питанию выполняется при включении питания.
Сброс CP включает сброс регистров GR, FPR, AR в нулевое состояние и установку режима ESA/390 в случае сброса для конфигурирования или режима, в котором находятся другие процессоры.
Сброс CP может сопровождаться сбросом TOD часов, основной и расширенной памяти и канальной подсистемы

2.11. Средства временной синхронизации (Timing)
Цель - отсчет времени и взаимная синхронизация процессоров:
• часы для отсчета реального времени и ведения даты и времени суток TOD сlock;
• компаратор времени, предназначенный для выработки прерывания, когда показания часов TOD превышают установленное программой значение;
• процессорный таймер (CPU Timer), обеспечивающий измерение прошедшего времени и выработку прерывания в случае истечения заданного интервала времени.

Часы TOD
• Часы TOD представляют собой 104-разрядный двоичный счетчик, который инкрементируется в типовом варианте каждую микросекунду добавлением +1 в разряд 51
Формат счетчика часов TOD
0 51 103
1 микросекунда

Состояния часов TOD:
Часы могут находиться в одном из следующих состояний:
• Выставлены (CR0, бит TOD-clock-sync-control),
• Не выставлены, • Остановлены (команда SET CLOCK), • Неисправны или • Отключены.

Установка показаний часов TOD:
В многопроцессорных конфигурациях одновременное выполнение команд SET CLOCK в разных процессорах блокируется.
Каждый процессор системы содержит 32-разрядный программируемый регистр TOD, младшие 16 бит которого содержат поле Programmable Field, загружаемое в память вместе с показаниями часов командой STORE CLOCK EXTENDED.
Это позволяет идентифицировать показания часов для разных конфигураций.

Компаратор времени
• Компаратор времени предназначен для сравнения показаний часов TOD с загруженной в компаратор уставкой. В типовом варианте сравниваются 48 старших разрядов счетчика часов и уставка такой же разрядности. В некоторых моделях с целью повышения разрешающей способности компаратора сравниваются более 48 бит. Компаратор вырабатывает прерывание в следующих случаях:
• часы идут и уставка в компараторе меньше показаний часов в сравниваемых разрядах;
• часы в неисправном или отключенном состоянии.

Процессорный таймер Процессорный таймер - двоичный счетчик в формате,
соответствующем старшим 64-м разрядам счетчика часов, исключая старший бит 0, рассматриваемый как знаковый.
• Таймер декрементируется вычитанием 1 из разряда 51 каждую микросекунду.
• Прерывание от таймера вырабатывается при достижении отрицательного значения, то есть, при установке 1 в разряде 0.
• Загрузка в таймер выполняется командой SET CPU TIMER, а чтение - командой STORE CPU TIMER.

2.12. Мультипроцессирование
Цель - распараллеливание вычислительных процессов с разделением данных и ресурсов и обеспечение высокой готовности системы.
Мультипроцессирование – это взаимодействие процессоров через общую память и средства межпроцессорных обменов.
Основу мультипроцессирования составляют: • общая разделяемая память; • межпроцессорное взаимодействие; • синхронизация часов.

Дополнительные средства мультипроцессирования
Дополнительными средствами являются внешние прерывания.
Канальная подсистема, включая все подканалы, в мультипроцессорной конфигурации может быть доступна всем процессорам.
Прерывания по вводу-выводу являются плавающими, то есть могут быть обработаны любым процессором.

Реализация мультипроцессирования
• Разделяемая память - обращение нескольких процессоров в одни и те же ячейки, определяемые одним и тем же абсолютным адресом.
• Адрес процессора в системе, присваиваемый каждому процессору при инсталляции системы и не изменяемый при ее реконфигурациях.
• Команда Signal Processor - основное средство взаимодействия процессоров путем сигнализации и получения ответа.
• В каждом процессоре предусмотрены средства для передачи, получения и выполнения приказов, а также формирования ответа для процессора, исполняющего команду Signal Processor.
• Адресуемый процессор формирует для процессора, исполняющего команду Signal Processor, код состояния.

2.13. Прерывания
• Прерывания процессора позволяют обеспечить быструю реакцию процессора при возникновении особых условий в самом процессоре, в подсистеме ввода-вывода, в других процессорах и вне системы.
• Прерывания допускаются только в режиме РАБОТА, за исключением прерывания для рестарта, которое может быть выполнено в режимах РАБОТА или СТОП.
• Инициируются прерывания запросами от устройств, в которых возникают условия прерываний.

Классы прерываний
Все прерывания разбиты на шесть классов:
1. Прерывание по вызову супервизора
2. Программные прерывания
3. Прерывания от схем контроля
4. Внешние прерывания
5. Прерывания ввода-вывода
6. Прерывание рестарта

Код прерываний
Причина прерывания внутри класса уточняется кодом прерывания этого класса, который в процессе прерывания заносится в отдельную область памяти, закрепленную за данным классом.
В зависимости от класса длина кода прерывания может быть 16, 32 или 64 бита.
Код прерывания используется прерывающей программой для определения процедуры, выполнение которой необходимо для обработки прерывания.

Класс прерываний = область памяти
Каждому классу прерываний выделены две фиксированные области памяти:
• Для текущего (старого) PSW прерываемой программы,
• Старое PSW обычно содержит адрес команды, которая выполнялась бы следующей, если бы прерывания не произошло.
• Для нового PSW прерывающей программы• Каждый процессор имеет свои области за
счет механизма префиксации.

Адреса размещения PSW, кодов и масок прерываний
Классы Прерыван
ий
Адреса памятидля
размещенияPSW
Маска прерыванийАдреса
памяти для кода прерыван
ия
Старое
Новое в PSW в управляющих регистрах
Внешние 304 432 7 CR0[48-50, 52-54, 57, 59]
134-135
Ввода-вывода
368 496 6 CR6[32-39] 184-191
От схем Контроля
352 480 13 CR14[35-39] 232-239
Программные
336 464 120-23
CR0[33], CR1[57], CR8[32-47], CR9[32-36], FPC?
142-143
Рестарта 288 416 - - -
Вызовсупервизо
ра
320 448 - - 138-139

Процесс прерывания
Процесс прерывания включает следующие действия:• распознавание класса и причины прерывания; • сохранение текущего PSW как старого PSW
распознанного класса; • сохранение информации, идентифицирующей
прерывание; • выборка и размещение в процессоре нового PSW
распознанного класса; • запуск прерывающей программы в соответствии с
новым PSW.Возврат к прерванной программе выполняется путем
восстановления в процессоре старого PSW.

Плавающие (floating interruption) прерывания
Прерывания, которые могут быть обработаны любым из процессоров конфигурации, называются плавающими прерываниями (floating interruption). Запрос на такое прерывание подается в первый из процессоров, в котором это прерывание не замаскировано, после чего сбрасывается для исключения повторных прерываний в других процессорах. К плавающим прерываниям относятся прерывания ввода-вывода, некоторые из внешних прерываний и от схем контроля.

Маскирование• Разрешение и запрет прерываний в процессоре реализуются с
использованием маскирования. • Маски прерываний размещаются в зависимости от класса в
текущем PSW, управляющих регистрах, регистре управления операциями с плавающей точкой FPC.
• Каждый разряд маски разрешает или запрещает соответствующее прерывание. Неразрешенные прерывания либо полностью игнорируются, либо остаются в состоянии ожидания.
• Маской могут быть запрещены как все прерывания данного класса, так и отдельные типы прерываний.
• Маскирование реализует механизм приоритетов прерывающих программ, когда каждая программа устанавливает разрешение или запрет ее прерывания другими программами.

Механизм приоритетов запросов
Прерывания обрабатываются в следующем порядке:
• прерывание по вызову супервизора; • программные прерывания; • прерывания от схем контроля, допускающие
отложенную обработку; • внешние прерывания; • прерывания ввода-вывода; • прерывание рестарта.

PWS
Обработка одновременно поступивших запросов осуществляется путем последовательной записи старых PSW и выборки новых PSW без исполнения команд прерывающих программ до тех пор, пока не будут обработаны все имеющиеся запросы. Далее в обратном порядке в соответствии с сохраненными старыми PSW выполняются прерывающие программы.