Embed Size (px)
DESCRIPTION
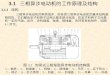
任务四 三相笼型异步电动机星 / 角起动控制. 包头轻工职业技术学院 任课教师 : 张晓晖. 一、任务提出. 凡是正常运行时定子绕组接成三角形的笼型异步电动机均可采用星 / 角减压起动方法来达到限制起动电流的目的。 Y 系列的笼型异步电动机 4KW 以上者均为三角形接法,都可以采用 Y-△ 减压起动的方法。 - PowerPoint PPT Presentation
Citation preview

任务四 三相笼型异步电动机
星 /角起动控制
包头轻工职业技术学院
任课教师 :张晓晖

一、任务提出 凡是正常运行时定子绕组接成三角形的笼型异步
电动机均可采用星 / 角减压起动方法来达到限制起动电流的目的。 Y 系列的笼型异步电动机 4KW 以上者均为三角形接法,都可以采用 Y-△ 减压起动的方法。
控制要求:按下启动按钮 SB1 , KM1 和 KMY 吸合,电机星型起动, 5 秒钟后, KMY 断开, KM△吸合,电动机三角形运行,起动完成。按下停止按钮 SB2 ,接触器全部断开,电机停止运行。如果电机超负荷运行,热继电器 FR 断开,电机停止运行。要求有继电器互锁控制。

二、必备知识 在传统继电器控制中实现星 / 角起动控制需要使用时间继
电器,采用 PLC 控制则需要使用定时器指令。 S7-200 PLC 的定时器类型有三种:接通延时定时器 (TO
N) 、有记忆接通延时定时器 (TONR) 、断开延时定时器 (TOF) 。
定时器分辨率 ( 时基 ) 有三种: 1ms 、 L0ms 、 l00ms 。定时器的分辨率由定时器号决定,
表 3.4.1 定时器号和分辨率

1. 1. 接通延时闭合定时器接通延时闭合定时器
工作原理:工作原理:① ① 当输入端当输入端接通接通时时 (( 上升沿启动上升沿启动 )) 开始开始 计时,计时,延时延时 500ms500ms 后定时器触点后定时器触点 T37T37 闭合。闭合。②② 当输入端断开时复位当输入端断开时复位 (( 定时器当前值定时器当前值 清零,预置定时值清零,预置定时值 PTPT ,定时器的触,定时器的触 点为开状态点为开状态 )) ;;
TONINT37
PT5
I1.0
( )T37 Q0.1
LD I1.0
TON T37,5
LD T37
= Q0.1
I1.0
T37计时值设定值
Q0.1
PT=5

2.2. 断电延时打开定时器断电延时打开定时器I1.2
T97 Q0.2
TOFINT97
PT8
( )
I1.2
Q0.2
计时值设定值
T97
PT=8
LD I1.2
TOF T97,8
LD T97
= Q0.2
工作原理:① 当输入端接通时复位 ( 定时器当前值清 零,预置定时值 PT ,定时器的触点为 闭合状态 ) ;② 当输入端断开后 ( 下降沿启动 ) 开始计 时,延时 80ms 后定时器触点 T97 打开。

其工作波形图如下:
输入端
Q0.1
当前值
设定值
TS
TS= 120*10ms
T4
M0.1
输入端设定值
TONR
PT
IN
TONR
PT
IN
I0.1
120
T4
( )T4 Q0.1
( )T4R1
M0.1
最大值32767
120
3.3. 有记忆通电延时闭合定时器有记忆通电延时闭合定时器
工作原理略:

使用定时器要注意:定时值 = 时基 × 预置值 PT 。由于定时器的
计时间隔与程序的扫描周期并不同步,定时器可能在其时基( 1ms 、 10ms 、 100ms )内任何时间启动,所以,为避免计时时间丢失,一般要求设置 PT 预置时间值必须大于最小需要的时间间隔。例如:使用 10ms 时基定时器实现 140ms延时(时间间隔),则 PT 应设置为 15 ( PT=10ms×15=150ms )。
接通延时定时器 TON ,一般用于单一时间间隔的定时;断开延时定时器 TOF ,一般用于故障后的时间延时; 有记忆接通延时定时器 TONR ,一般用于累计许多时间间隔 。

三种定时器的特点
定时器类型 接通 IN 时(初时时刻)
当前值 = 设定值(计时到)
断开 IN 时
TON 开始计时 , T 位 =1 复 位 ,T 位=0, 当前值=0
TONR 开始计时 ,T 位 =0, 当前值 =0 T 位 =1 不变
TOF 复位 , T 位 =1, 当前值 =0 T 位 =0 开 始 计时

说明:应用定时器指令应注意的几个问题:
(1) 不能把一个定时器号同时用作断开延时定时器 (TOF) 和接通延时定时器 (TON)( 相当于同一定时器号既用作模拟断电延时型的物理时间继电器功能,又用作模拟通电延时型的物理时间继电器功能 ) 。
(2) 使用复位 (R) 指令对定时器复位后,定时器位为“ 0” ,定时器当前值为 0 。
(3) 有记忆接通延时定时器 (TONR) 只能通过复位指令进行复位操作。
(4) 对于断开延时定时器 (TOF) ,需在输入端有一个负跳变 ( 由 on 到 off) 的输入信号启动计时。
(5) 不同分辨率的定时器,它们当前值的刷新周期不同。

三、解决方案 主电路的三组接
触器的主触点分别将电动机的定子绕组接成三角形或者星形, KM1 和 KMY 主触点闭合时,电动机绕组接成星形; KM1 和 KM△主触点闭合时,绕组接成三角形。两种接线方式的切换需要在极短的时间内完成,在控制电路中采用了时间继电器,可定时自动切换。
三相异步电动机 / 角减压起动电气控制原理

( 1 ) I/O 分配表及外部接线图

梯形图 分析: ① 按启动按钮 SB1 ,网络 1 中 I0.1
状态为 ON ,其常开触点闭合, Q0.1接通并自锁,驱动接通电源接触器线圈 KM1 。
②Q0.1 接通并自锁的同时,网络 2中 Q0.1 常开触点得电闭合, Q0.3 闭合,驱动 KMY 。 KM1 和 KMY 主触点得电,电机将星型起动,此时,网络 3 中定时器开始启动。
③ 定时器启动 5 秒钟之后, T37 定时时间到,网络 2 中定时器常闭触点断开,使得 Q0.3 失电,外部接触器KMY 线圈失电,网络 3 中的 Q0.2 常闭触点也断开,定时器停止工作,网络 4 中定时器常开触点闭合,使得 Q0.2 线圈通电,驱动角型启动交流接触器 KM△ 线圈,电机开始三角形接法运行, 实现了星 / 角启动。
④ 按下停止按钮 SB2 ,电机停止运行。

项目训练:艺术彩灯控制 控制要求: 按一下启动按钮,按照
以下的规律显示:从 1 到8 依次把灯点亮,然后循环。即首先 1 灯亮, 1S后 1 灯和 2 灯亮,再 1S后 1 灯、 2 灯和 3 灯亮,……,全亮 1S 后,熄灭,再次重复上述过程。按一下停止按钮,则循环停止。
I/O 分配: 8 组灯 1 、 2 、 3 、 4 、
5 、 6 、 7 、 8 分别接 PLC 主机的输出点 Q0.0 、 Q0.1 、 Q0.2 、 Q0.3 、 Q0.4 、 Q0.5 、 Q0.6 、 Q0.7 。
启动按钮接主机的输入点 I0.0 。
图 3.4.8 艺术彩灯实验面板图