Embed Size (px)
DESCRIPTION
第12回 ディジタル画像(3) [email protected]. 第12回 ディジタル画像処理 ( 3 ). 第12回 ディジタル画像(3) [email protected]. スケールスペースの概念. 波形を、帯域幅が可変のガウシァンフィルタでぼかすことにより、様々な尺度で捉えた波形集合に拡張し、基本構造の解析に利用 ~ 階層的な表現 A.Witkin(1983): 波形の 2次微分の零交差 (変曲点)に注目 - PowerPoint PPT Presentation
Citation preview

3
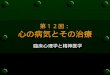
スケールスペースの概念 波形を、帯域幅が可変のガウシァンフィルタで
ぼかすことにより、様々な尺度で捉えた波形集合に拡張し、基本構造の解析に利用
~ 階層的な表現 A.Witkin(1983):
波形の2次微分の零交差(変曲点)に注目 D.Marr(1982):
画像の零交差輪郭から得られる primal sketchに基づく画像認識
飯島 (1962) :視覚パターンの基本方程式 (ボケの理論)
第12回 ディジタル画像(3) [email protected]

5
尺度空間 (A.Witkin) 波形の2次微分の零交差(変曲点)が、フィルタの
帯域幅を変化させた時に描く曲線 n 次元の尺度空間フィルタリング:
L(x;σ)=∫Rn g(a;σ)f(x-a)da g(x;σ)=(½ πσ)n/2 exp(-xtx/2σ)
拡散方程式: ∂ σL = ½ ⊿ 2L ; ⊿ 2= ∂xx+∂yy + ・・ 因果性:
高いスケール( σ )で起こったことは、低いスケールに影響しない (from fine to coarse)~ スケールパラメータが大きくなることにより新しい輪郭が作成されることは無い(零交差輪郭は上で閉じるのみ)
第12回 ディジタル画像(3) [email protected]

8
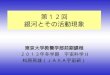
⊿ 2G フィルタ (D.Marr & E.Hildreth)
第12回 ディジタル画像(3) [email protected]
1 次元
2次元
メキシカンハット (円対称)
関数値 フーリエ変換結果

11
スケールスペースの応用 エッジ検出 輪郭線形状を用いた2次元物体認識
- H.Asada(1986): 曲率の零交差の変化を用いた、工具(ドライバー、ハンマー)の識別
第12回 ディジタル画像(3) [email protected]

12
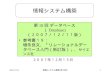
Hough 変換の概念
投票と多数決原理に基づく図形の検出 P.V.C.Hough(1962):
直線の検出 R.O.Duda and P.E.Hart(1972):
円、楕円の検出 D.H.Ballard(1981):
一般化 Hough 変換 ~座標変換(平行移動、回転、拡大)パラメータ空間
Y.Lamdan(1988): Geometric Hashing ~不変特徴の集合で形状を表現、 Hash Table に投票
第12回 ディジタル画像(3) [email protected]

14
Hough 変換の処理の流れ
1. 初期化:全てのセルの投票度数を0にリセット
2. 投票:各特徴点について軌跡を計算、軌跡が通過するセルの度数をプラス1
3. ピーク検出:投票度数が一定値以上の極大値を持つセルを抽出
4. 検証:真のピークかどうかをチェック
第12回 ディジタル画像(3) [email protected]