Embed Size (px)
DESCRIPTION
班級 : 夜四技自控乙班 學號 : 99912109 姓名 : 林峻廷 指導 老師 : 劉雲輝. 電動機車 馬達控制 技術剖析. 在環保意識抬頭之下,多數人希望能以電動機車取代空氣污染高的傳統機車,因而極力發展電動機車。目前常見電動機車馬達有刷直流馬達與無刷直流馬達兩種,兩種都有良好的操控性。 馬達除了要有優秀的性能還必須配合良好的控制器與驅動電路,才可產生整合性能優良的電動動力系統。. 摘要. - PowerPoint PPT Presentation
Citation preview

1
電動機車馬達控制技術剖析
班級 : 夜四技自控乙班學號 : 99912109姓名 : 林峻廷指導老師 : 劉雲輝
2
摘要 在環保意識抬頭之下,多數人希望能以電動機車取代空氣污染高的傳統機車,因而極力發展電動機車。目前常見電動機車馬達有刷直流馬達與無刷直流馬達兩種,兩種都有良好的操控性。 馬達除了要有優秀的性能還必須配合良好的控制器與驅動電路,才可產生整合性能優良的電動動力系統。
3
文獻背景 國內電動機車的研發歷史,最早是在位於觀音山五股工業區的康陽機車,在十九年前即開始投入電動機車研發,而在民國 81 年前在台灣開始上市推廣( City Bike 電動機車),不過在國內銷售並不好,且呈虧損狀態,故目前仍以外銷歐洲為主;另外,經濟部能源委員會亦於民國八十年七月起委託工研院機械所與三陽、光陽、山葉、台鈴、展葉、永豐等六家機車業者及士林、台全等電機業者合作投入開發
ZES2000 雛型電動機車,而於民國 84 年成功研發完成(後改稱為 EC1 )。
4
電動車原理 電動機車種藉由隨車搭載的電池提供電力,以使控制器控制馬達轉動,復經傳動機構驅動行駛的交通工具

5
電動機車剖面圖
動力馬達 有刷直流馬達無刷直流馬達
6
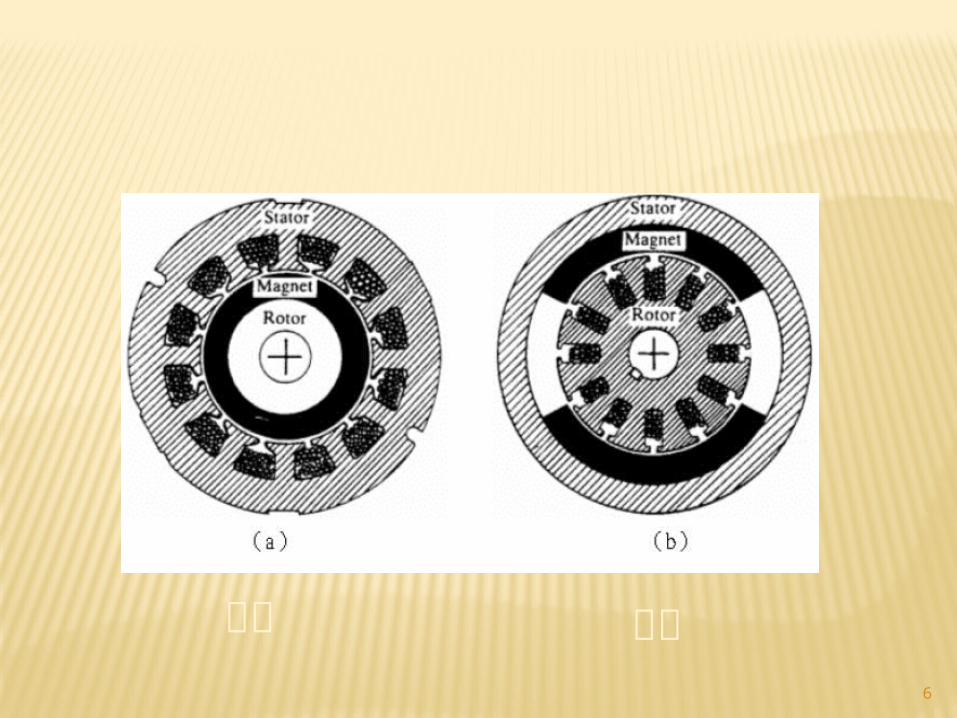
有刷無刷
7
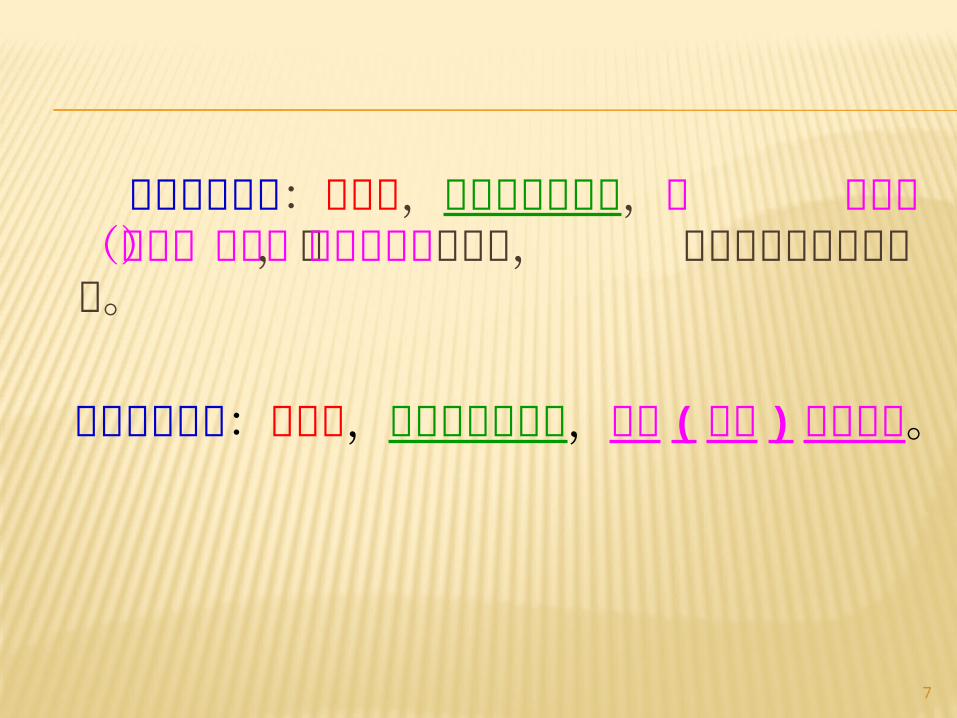
直流有刷馬達:有碳刷,定子是永久磁鐵,旋 轉部分(轉子)是電樞,由繞組與鐵心所構成, 因流過電流而產生轉矩。直流無刷馬達:無碳刷,轉子為永久磁鐵,繞組 ( 電樞 ) 在定子上。

8
有刷直流電馬達剖面圖
9
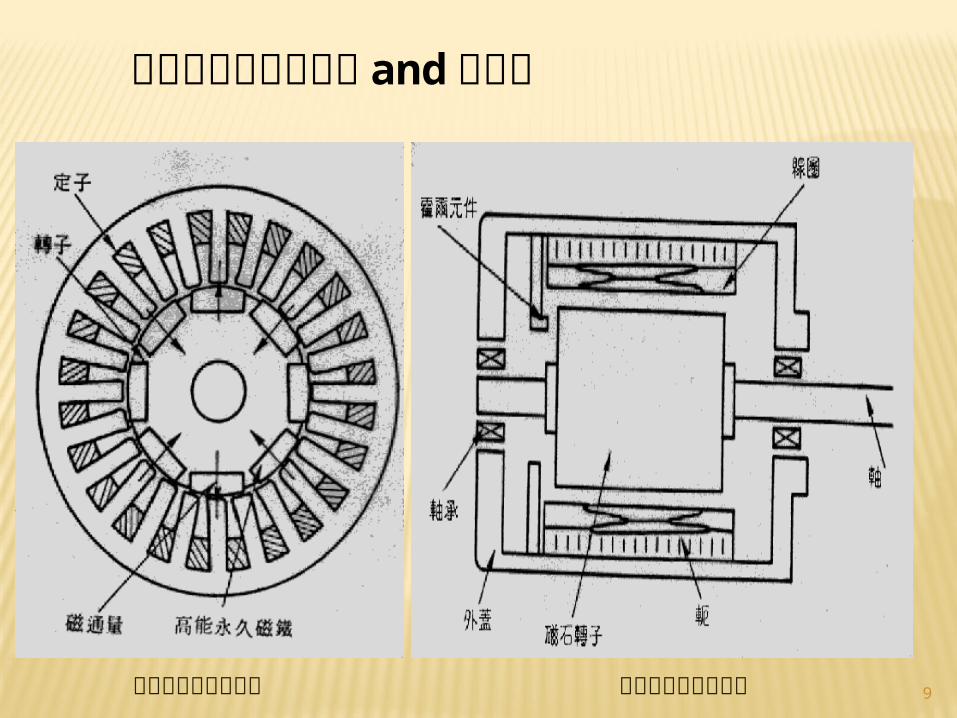
無刷直流馬達剖面圖 and 結構圖
無刷直流馬達剖面圖 無刷直流馬達結構圖
10
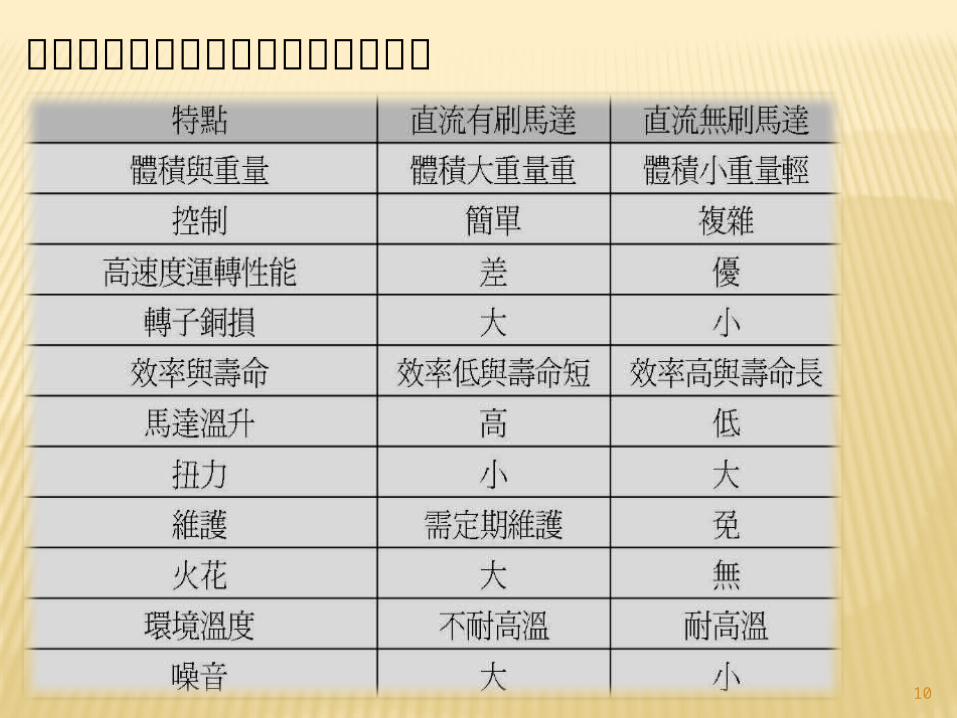
直流有刷馬達與直流無刷馬達比較表
11
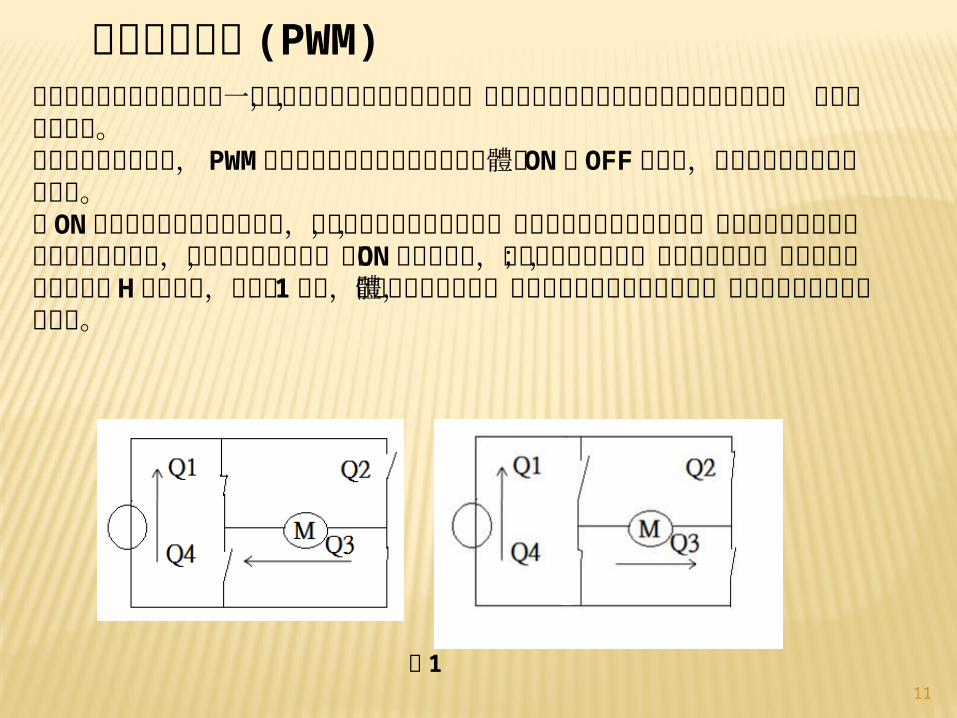
脈波寬度調變 (PWM)所謂脈波寬度調變信號就是一連串可以調整脈波寬度的訊號,它可以用簡單的方法改變某個方波的比例, 也就是工作週期。對有刷直流馬達來說, PWM 主要是要對電橋上的四組功率晶體做 ON或 OFF 的動作,藉此控制馬達轉速或是方向。當 ON 的時間越長相對的電壓提升,流進馬達的電流跟著增加,馬達輸出的扭矩就會變大,當扭矩大於外部負載時就會產生角速度,馬達轉速就會加快,反之 ON 的時間越短,轉速就會跟著變慢;方向控制方面,以有刷直流馬達常用的 H 電橋為例,如下圖 1 所示,當開關不同功率晶體使電流流經馬達方向改變時,就會使馬達產生正轉或反轉。
圖 1
12
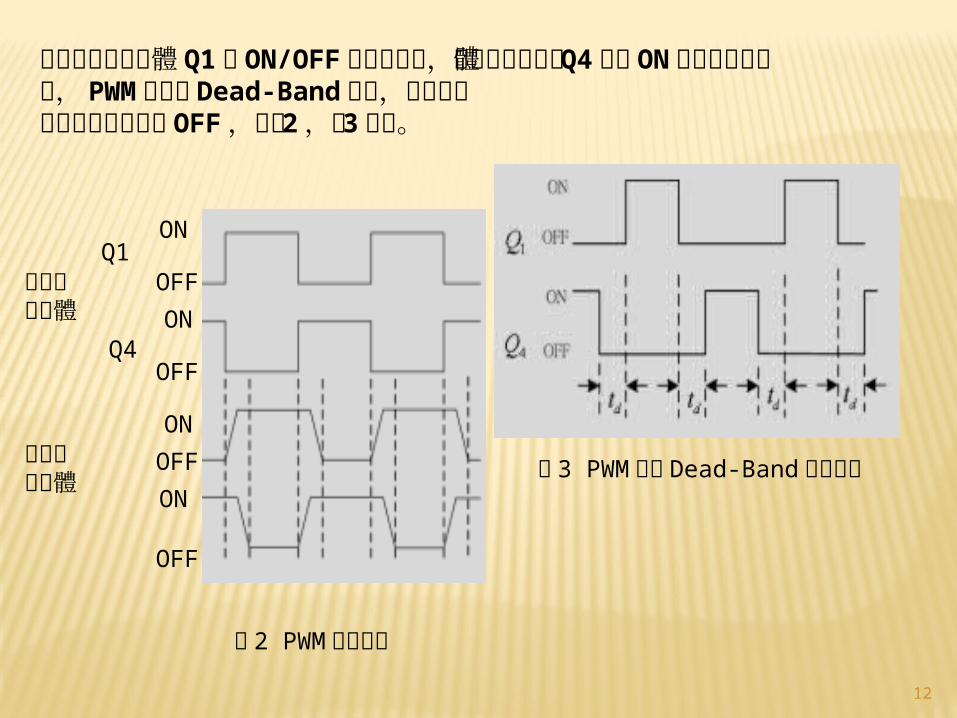
為了避免功率晶體 Q1 在 ON/OFF 交換時間時,發生與功率晶體Q4 同時 ON 的狀況造成短路, PWM 則有了 Dead-Band 功能,可在發生短路時間段強制為 OFF ,如圖 2 ,圖 3 所示。
ON
ON
ON
ON
OFF
OFF
OFF
OFFQ1
Q4
理想的電晶體
實際的電晶體
圖 2 PWM 輸出波形
圖 3 PWM 使用 Dead-Band 輸出波形

13
由於無刷直流馬達是為多相馬達,需靠霍爾元件來感測轉子位置,再以PWM 來控制馬達,以三相無刷直流馬達為例,如圖 4 所示,三個霍爾元件依據其排列安裝方式,可分成具相互成 60 度角或 120 度角兩種,因此每隔馬達旋轉角度 60 度或 120 度時,其中有一個元件就會變換其狀態,再根據輸出訊號狀態, PWM將輸出控制訊號至對應功率晶體,產生正確換相步驟。
圖 4 無刷直流馬達伺服系統
14
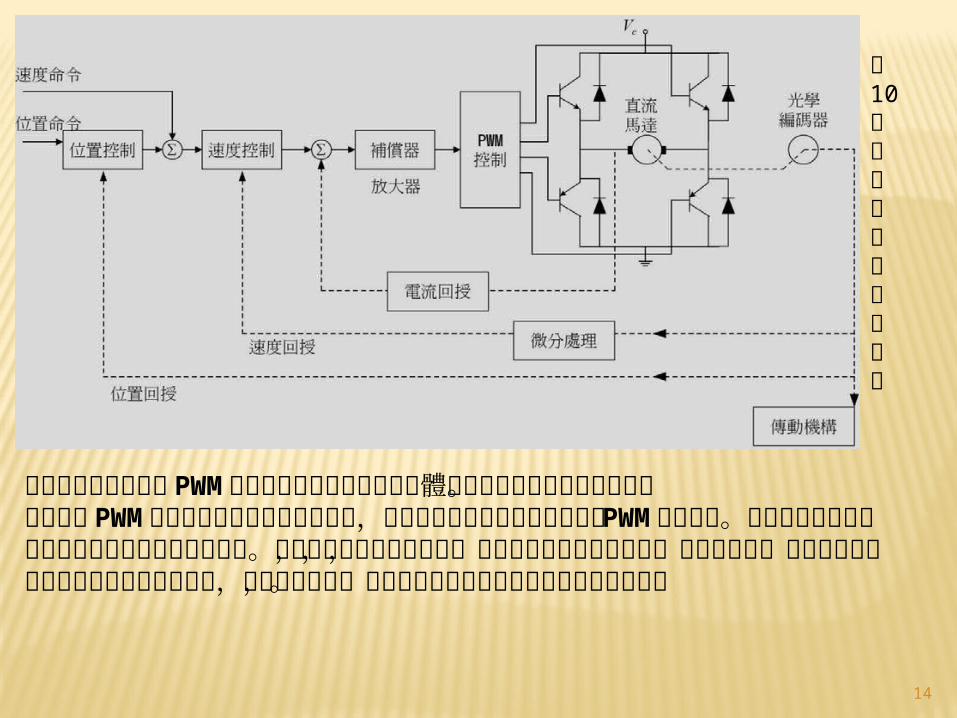
有刷直流馬達主要由 PWM去控制電橋上的四組功率晶體來進行正反向及速度的控制。由於單純 PWM 控制可能無法達到理想的狀態,此時可以加入電流的回授補償讓 PWM效率提高。另外速度回授與位置回授可透過光學編碼器來得到。對伺服馬達的控制應用上,使用多重迴路的控制設計,是有必要的,因為只有將內層反應速度較快的控制迴路,控制得宜之後,方能使外層的迴路自然的擁有良好的響應。
圖 10 有刷直流馬達伺服系統
15
結論國外開發的電動機車最快時速已可達 160km/h[8] ,續航力也可達到 160km ,甚至在幾年前也開始了電動機車的賽事,這已經打破了大家對電動機車的刻板印象,沒想到電動機車也可以如此狂飆,往後電動機車的發展勢必蔚為風潮。國內目前正積極的投入金錢與人力開發性能更加優異的電動機車,只要在馬達、馬達控制與新型電池開發能有所突破,使得馬力與續航力能更加提升,未來電動機車要全面取代傳統機車不再是遙不可及的想法。
16
參考文獻● Jianbo Cao, Binggang Cao, Zhifeng Bai,and Wenzhi Chen, “Energy-RegenerativeFuzzy Sliding Mode Controller Design forUltracapacitor-Battery Hybrid Power of Electric Vehicle,” in Proc. International Conference on Mechatronics and Automation, pp. 1570-1575, Sept., 2007.
● 「直流有刷馬達基本構造」,國立成功大學馬達科技研究中心, 2008 ,取自http://emotors.ncku.edu.tw/
● 孫清華編譯,「最新無刷直流馬達」,全華科技圖書, 2001 。● 吳南億,「以位數信號處理器為基礎之電動機車無刷馬達驅動器」,國立中山大學電機所碩士論文, 2000 。
“TMS320F2809, TMS320F2808,TMS320F2806, TMS320F2802,TMS320F2801, UCD9501, TMS320C2802,TMS320C2801 Digital Signal Processors Data Manual”, Texas Instruments, 2006.
●