Embed Size (px)
Citation preview
Москва, 2012 г.
Аппаратная реализация бортовой автономной системы улучшенного и
синтезированного зрения мобильных устройств
Бондаренко А.В., Бондаренко М.А., Докучаев И.В.www.rastr.net
ООО «РАСТР TЕХНОЛОДЖИ»
Введение• Мобильная техника – устройства, способные
перемещаться в некоторой среде.
• Одна из наиболее важных задач управления -
задача навигации мобильной техники в реальном времени в условиях недостаточного объёма информации при работе в сложной внешней обстановке.
Мобильная техника
Автономная (роботы) Автоматическая Пилотируемая

Требования, предъявляемые к системам навигации
Актуальность
Интеллектуальность
Надёжность Устойчивость
Работа в реальном времени
Гарантия работы в заданных условиях
Качество и удобство выдаваемых данных
По любым входным данным
Обеспечение надёжности системыОтработанные оригинальные схемотехнические
решения
Современная элементная база
Автономная работа системы
Дублирование критических узлов: реализация соответствующей схемы 100% резервирования
Протоколирование всей выходной информации и телеметрии на твердотельный носитель
Испытание готовой системы в условиях, наиболее приближенных к условиям эксплуатации
SSD
100%
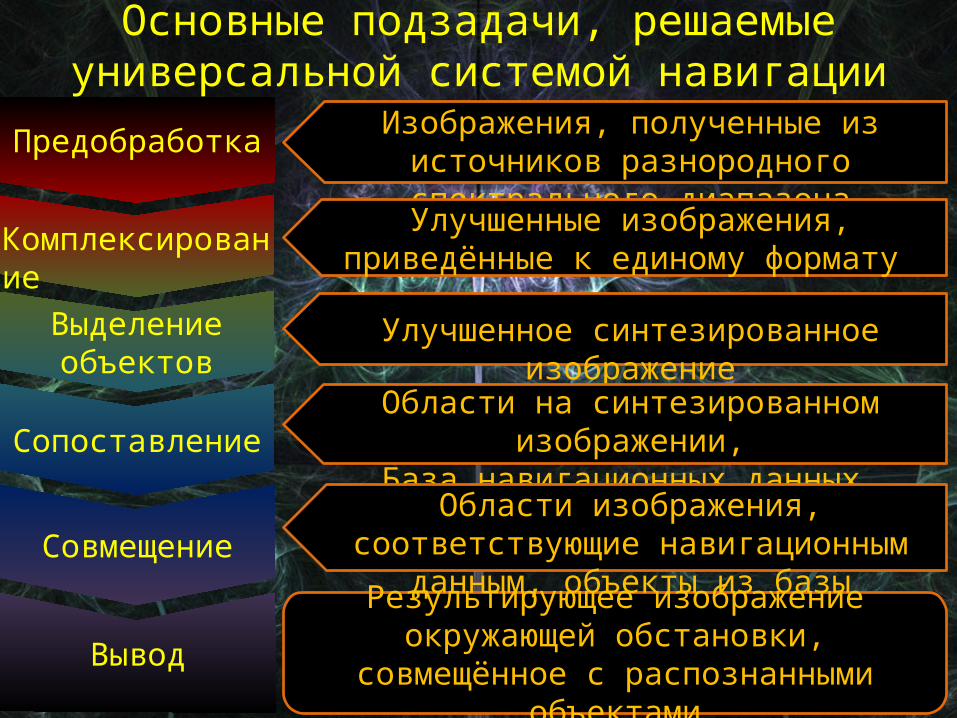
Основные подзадачи, решаемые универсальной системой навигации
Результирующее изображение окружающей обстановки, совмещённое с распознанными
объектами
Предобработка
Выделение объектов
Сопоставление
Совмещение
Вывод
Комплексирование
Изображения, полученные из источников разнородного спектрального диапазона
Улучшенные изображения, приведённые к единому формату
Улучшенное синтезированное изображение
Области на синтезированном изображении,База навигационных данных
Области изображения, соответствующие навигационным данным, объекты из базы
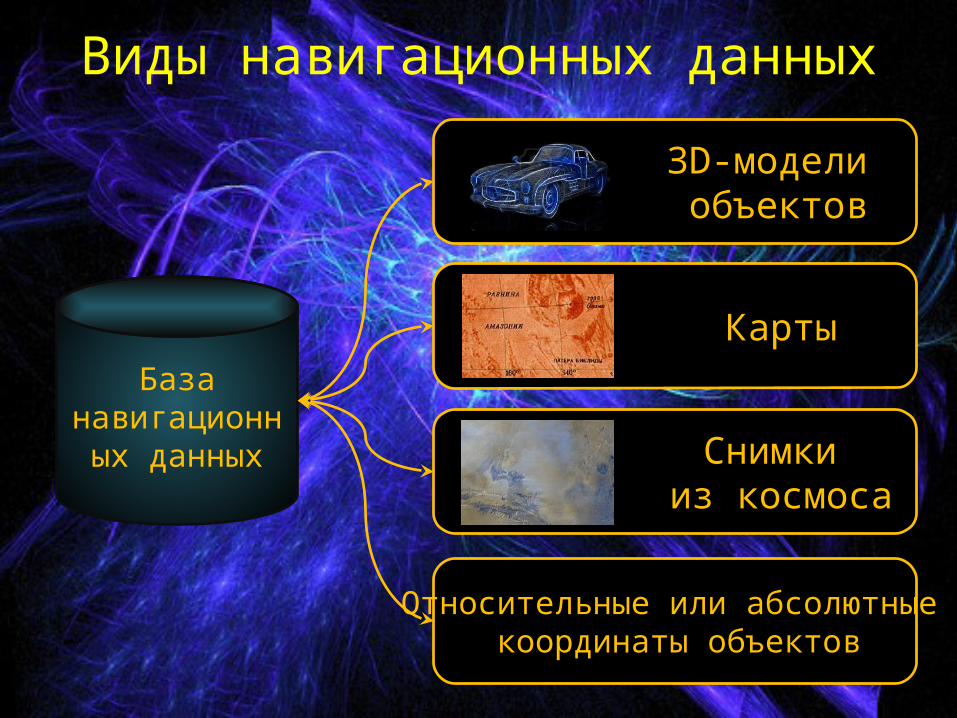
Виды навигационных данных
ЗD-модели объектов
Карты
Снимки из космоса
Относительные или абсолютные координаты объектов
Базанавигационных
данных

Notebook(Dock Station)
- опция
м
Основные компоненты системы
Управляющая бортовая ЭВМ с
графическим процессором
RS-485
резерв
TFT-монитор1280 х 1024
60 Гц
синтезированноеизображение
SSD для протокола
100%
RT-107MX
Устройства ввода информации
Автономный видеопроцессор
RT-107MX
Источники ТВ информации
GPU VGA
реальные изображения
Навигационные данные
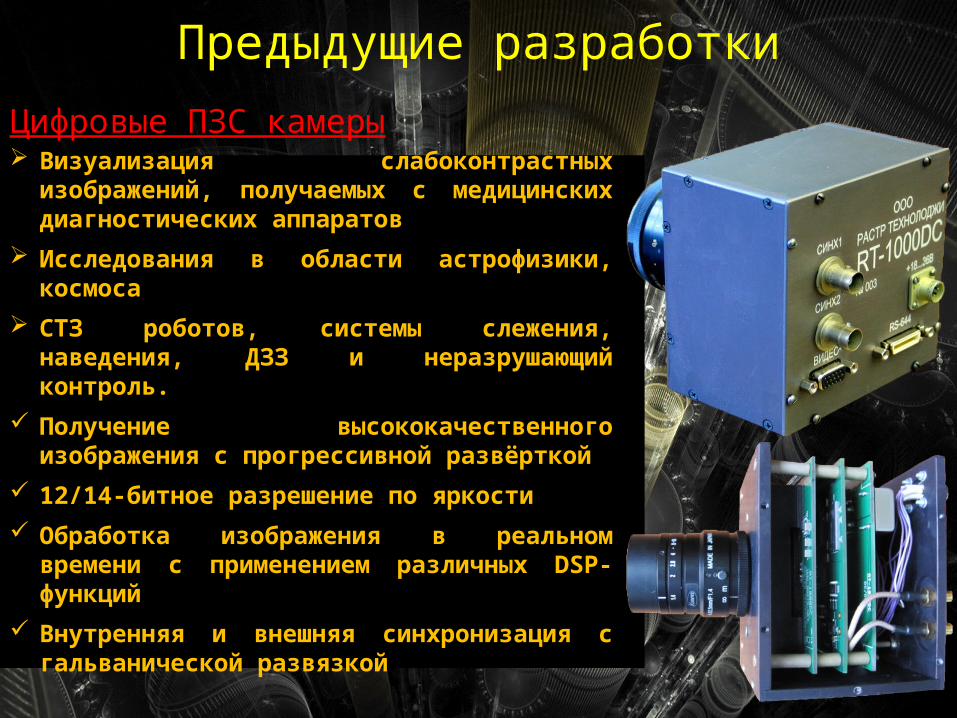
Цифровые ПЗС камеры Визуализация слабоконтрастных
изображений, получаемых с медицинских диагностических аппаратов
Исследования в области астрофизики, космоса СТЗ роботов, системы слежения, наведения,
ДЗЗ и неразрушающий контроль. Получение высококачественного изображения
c прогрессивной развёрткой 12/14-битное разрешение по яркости Обработка изображения в реальном времени
с применением различных DSP-функций Внутренняя и внешняя синхронизация с
гальванической развязкой
Предыдущие разработки

Предыдущие разработкиАвтономная вычислительная система RT-106MX Одновременная работа до 6 цифровых
камер RT-1000DC Входной поток данных до 360 Мбайт/с Обработка и анализ изображений в
реальном времени по заданным алгоритмам
Использование встроенного процессора NIOS II
96 Мб SDRAM, 512 Мб Flash (конфигурация настроек камер и хранение изображений)
Часы реального времени, календарь, привязка к глобальному времени
Интерфейсы - 7 x Channel Link RS-644 или Fiber Channel по меди , 2 x RS-232
Видео выходы: SVGA на TFT монитор 1280 x 1024 x 60 Гц, CCIR
Выдача сигналов тревоги и телеметрии, ведение журнала
Питание с борта: +18 … +36 В, 15 Вт Диапазон рабочих температур: -40 … +70 °С
Габариты печатной платы: 20 х 16 см

Предыдущие разработки
AFE - АЦП - 12 бит @ 40 МГц с VGA DSP обработка и управление - ПЛИС Altera
семейства Cyclone II Память кадров изображений - SDRAM (16М х 16) Флэш память для записи вспышек - 128 Мбайт Цифровой датчик температуры ЦФК в диапазоне
-40 … +75 °С Интерфейс обмена данными и управления:
CAN-2B Интерфейс запуска - LVDS Скорость передачи данных - до 1 Мбайт/сек Питание - 12 В Потребление - 2.5 Вт Аппаратная поддержка рекурсивного
накопления, усреднения и вычитания кадров
Цифровая камера для регистрации атмосферных грозовых разрядов миссии «ЧИБИС-М»
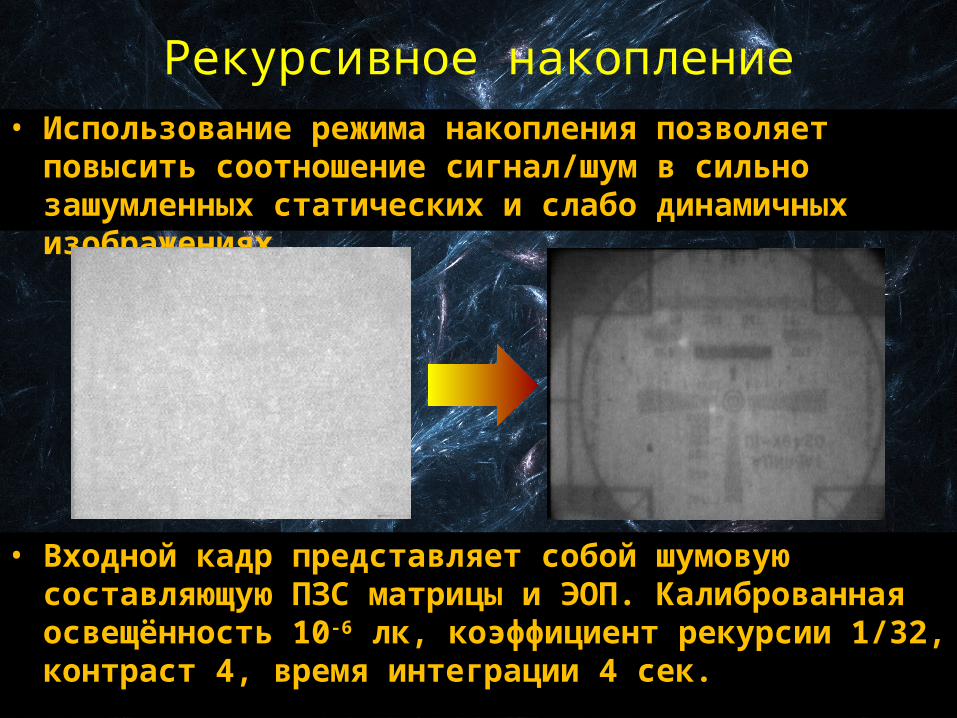
Рекурсивное накопление• Использование режима накопления позволяет повысить
соотношение сигнал/шум в сильно зашумленных статических и слабо динамичных изображениях.
• Входной кадр представляет собой шумовую составляющую ПЗС матрицы и ЭОП. Калиброванная освещённость 10-6 лк, коэффициент рекурсии 1/32, контраст 4, время интеграции 4 сек.
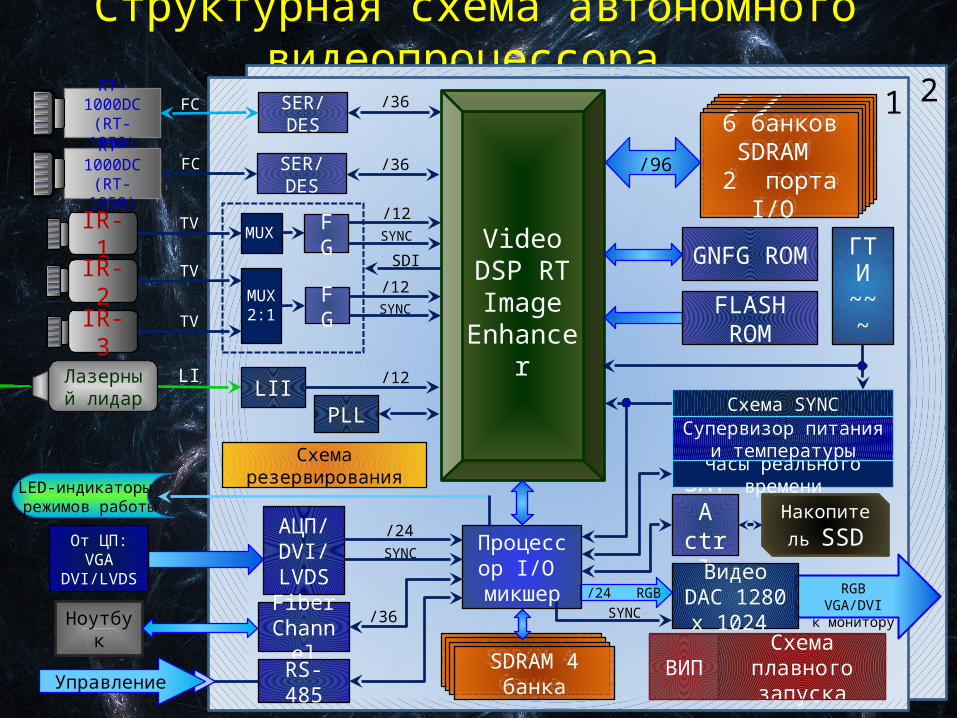
Структурная схема автономного видеопроцессора
м
6 банков SDRAM
2 порта I/O
6 банков SDRAM
2 порта I/O
6 банков SDRAM
2 порта I/O
SATA ctrl
Накопитель SSD
ГТИ~~~
Часы реального времени
Супервизор питания и температуры
RGB VGA/DVIк мониторуSYNC
SDRAM 4 банкаSDRAM 4 банкаSDRAM 4 банкаSDRAM 4 банка
6 банков SDRAM
2 порта I/O
6 банков SDRAM
2 порта I/O
6 банков SDRAM
2 порта I/O
ВИП Схема плавного запуска
АЦП/DVI/LVDS
/24SYNC
Fiber Channel
/36
RS-485Управление
Ноутбук
От ЦП: VGA DVI/LVDS
LED-индикаторы режимов работы
LIIPLL
/12
IR-3
IR-2
IR-1
RT-1000DC(RT-1050)
RT-1000DC(RT-1050)
MUX FG
FG/12
/12
SYNC
SYNC
SER/DES
SER/DES
FC
FC
TV
TV
TV
/36
/36
LI
1 2
РЕЗЕРВ
Видео DAC 1280 x 1024
VideoDSP RTImage
Enhancer
GNFG ROMSDI
/96
Схема резервирования
FLASH ROM MUX
2:1
Лазерный лидар Схема SYNC
Процессор I/O
микшер /24 RGB
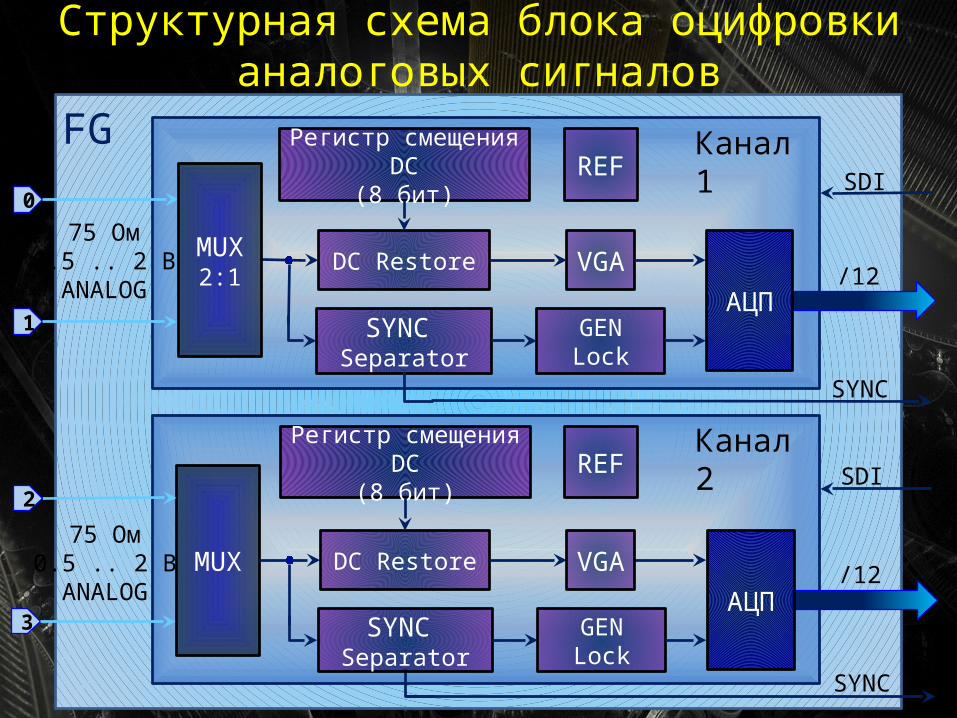
Структурная схема блока оцифровки аналоговых сигналов
MUX
DC Restore
SYNC Separator
Регистр смещения DC(8 бит)
GEN Lock
VGA
Канал 1
Канал 2
SDI
/12
FG
/12
SYNC
75 Ом0.5 .. 2 ВANALOG
0
1
2
3
SYNC
SDI
75 Ом0.5 .. 2 ВANALOG
MUX2:1
Регистр смещения DC(8 бит)
DC Restore
SYNC Separator
VGA
GEN Lock
АЦП
REF
REF
АЦП
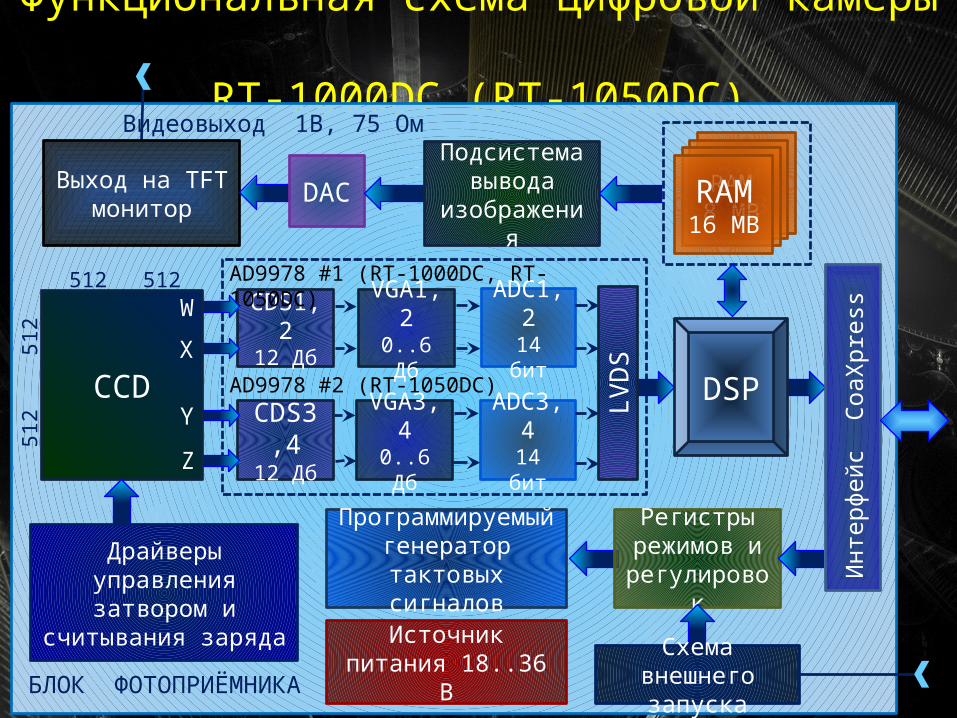
Функциональная схема цифровой камеры RT-1000DC (RT-1050DC)
CDS1,212 Дб
CDS3,412 Дб
VGA1,20..6 Дб
VGA3,40..6 Дб
Источник питания 18..36 В
Программируемый генератор тактовых
сигналов
RAM8 MB
RAM8 MB
RAM8 MB
RAM16 MB
ADС1,214 бит
ADС3,414 бит
БЛОК ФОТОПРИЁМНИКА
512
512
512
Выход на TFT монитор
Видеовыход 1В, 75 Oм
DSP
AD9978 #1 (RT-1000DC, RT-1050DC)
Регистры режимов и
регулировок
Интерфейс
CoaX
pres
s
Схема внешнего запуска
DACПодсистема
вывода изображения
CCD
W
X
Z
Y LVDSAD9978 #2 (RT-1050DC)
Драйверы управления затвором и считывания
заряда
512
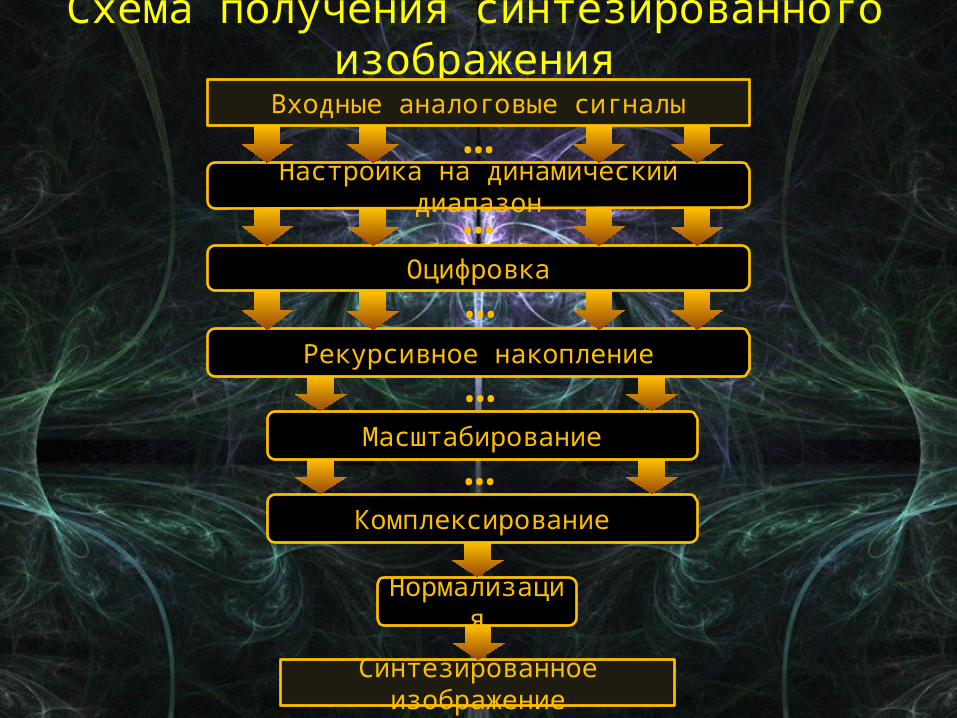
Схема получения синтезированного изображенияВходные аналоговые сигналы
Настройка на динамический диапазон
Оцифровка
Комплексирование
Масштабирование
Рекурсивное накопление
Нормализация
……………
Синтезированное изображение
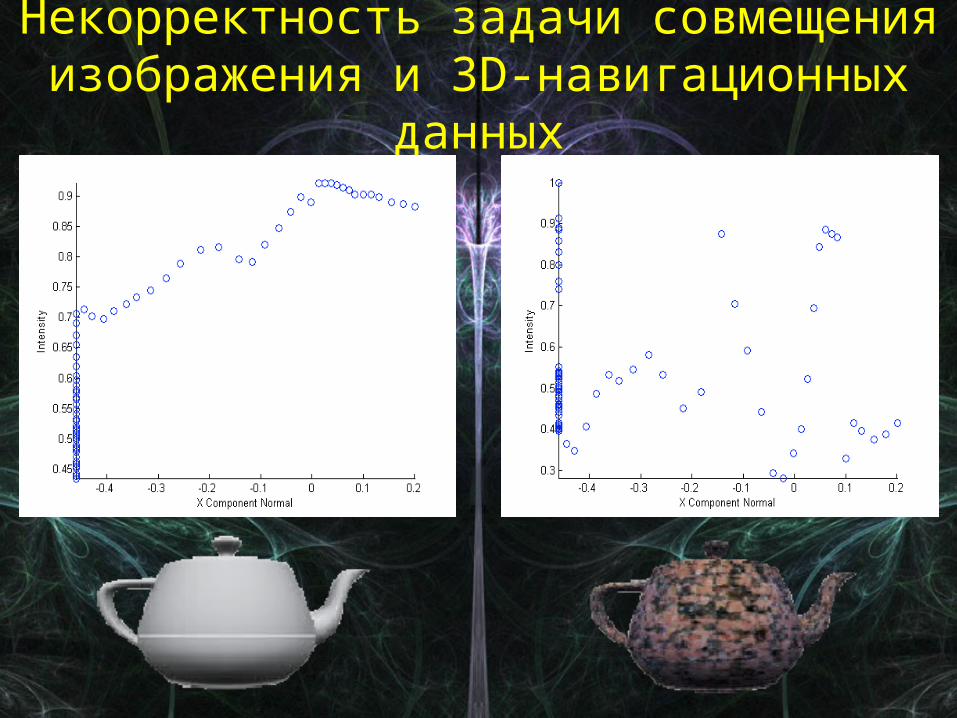
Некорректность задачи совмещения изображения и 3D-навигационных данных
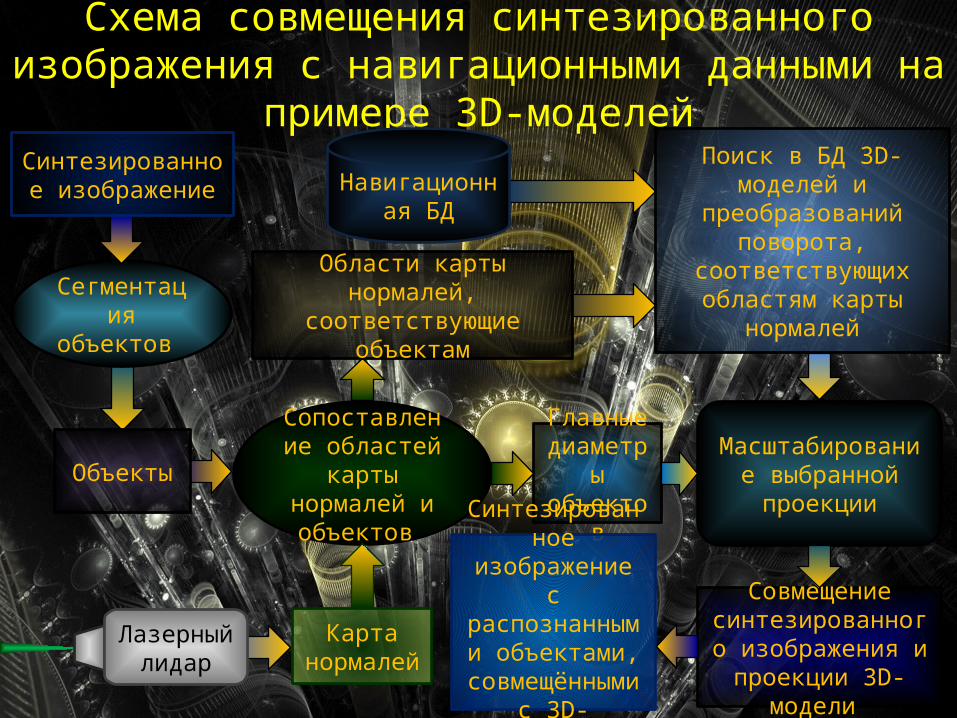
Схема совмещения синтезированного изображения с навигационными данными на примере 3D-моделей
Карта нормалей
Сопоставление областей карты
нормалей и объектов
Главные диаметры объектов
Масштабирование выбранной проекции
Совмещениесинтезированного
изображения и проекции 3D-модели
Синтезированное изображение с распознанными
объектами, совмещёнными с
3D-моделями
Сегментация объектов
Объекты
Области карты нормалей, соответствующие объектам
Поиск в БД 3D-моделей и преобразований
поворота, соответствующих
областям карты нормалей
Навигационная БД
Лазерный лидар
Синтезированное изображение
РезультатыНа основании более чем 20 летнего опыта
разработки систем ввода и обработки изображений в реальном времени предложена
новая архитектура высокопроизводительных систем навигации, соответствующая любым
требованиям надёжности.
В рамках указанной архитектуры предложены алгоритмы, позволяющие решить задачу
навигации мобильной техники в самом общем случае.
Cпacибо за внимание! ^_^
www.rastr.net












![Программно-аппаратная архитектура CUDA, осень 2015 [Открытое прочтение]: Иерархия памяти GPU](https://img.pdfslide.tips/doc/110x75/58ef2f751a28ab53638b464d/-cuda--58ef32af31ab1.jpg)