Embed Size (px)
Citation preview
資訊碩一 吳振華
An Extended Method of the Parametric Eigenspace Method by Automatic
Background Elimination
Abstract
The 3-D object recognition is very important and basic technique for robot vision systems in factory production lines.
In such systems, appearance-based object recognition method does not require the use of any special 3-D measurement devices, so it can be used in practical tasks.
Abstract
Two typical methods appear in related work on appearance-based object recognition.
One is a method [1] that represents object aspects by linearly combining two-dimensional images.
The other is a method[2] that groups multiple 3-D views of an object.
Abstract
A problem common to these methods is the need for a huge database of learning images.
The parametric eigenspace (PES) method [3] has been proposed as a means of solving this problem.
It realizes effective data compression by using the principal component analysis (PCA) technique to reduce the number of data space dimensions and representing images with a series of data points in the reduced space .
Abstract
In this paper, we propose the parametric eigenspace (PES) method that has a function for removing any background without a priori knowledge about the background.
Multiple ellipses are used for the primitive shapes in the method.
Since we regard the determining of ellipses' geometric parameters as a combinatorial optimization problem, a practical and effective solution for determining them can be found by using Genetic Algorithm (GA)[8].
Abstract
Our proposed method can reduce background disturbance and recognize 3-D poses of an object stably.
Furthermore, it does not need any specified knowledge about the background and its performance does not depend on the textures of the object's surface.
Methods (PES method)
First, in the learning phase, the PCA technique is utilized to reduce the number of dimensions of the original data space generated by a set of multi-view learning images.
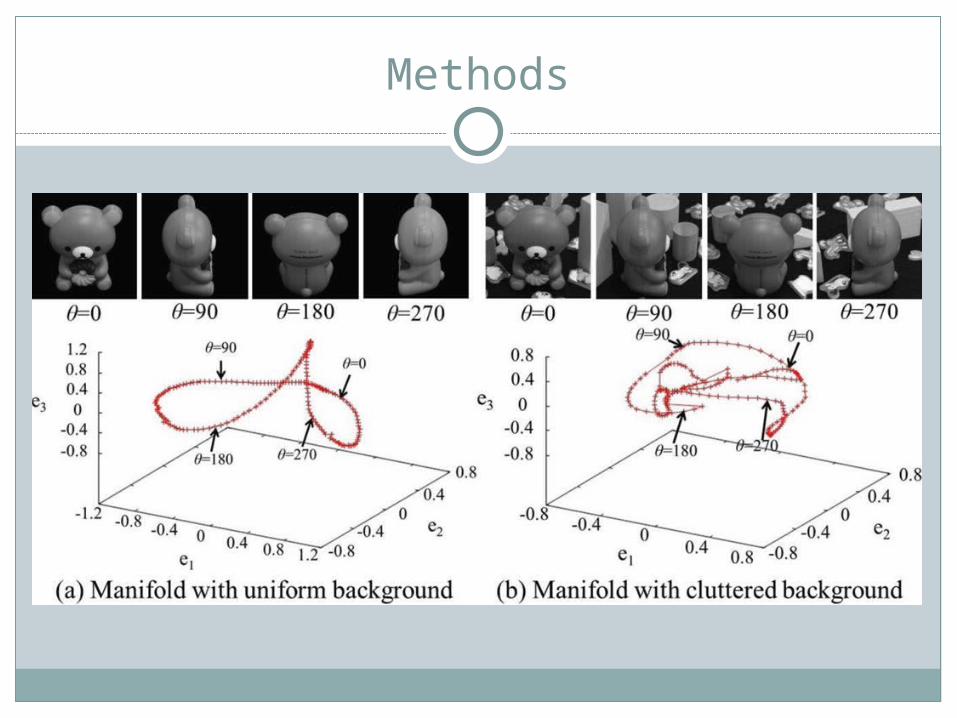
Second, all learning images are projected to the reduced space (eigenspace) and represented as data points in the space. A series of data points corresponding to multi-view images is called a 'manifold'.
Methods (PES method)
Third, in the recognition phase, an input image of an object is also projected to the same eigenspace.
Finally, the nearest data point in the manifold to the input data is found and becomes the recognition result.
Methods
Methods
The method consists of two phases, a learning phase and a recognition phase.
In the learning phase, a lot of images captured from various viewpoints are stored. Each image is represented as a vector in multi-dimensional space. Next, the number of dimensions is reduced using the PCA technique.
In the recognition phase, an input image is compared with all learning data in the feature space and the best-match image is determined.
Methods
Methods
Various kinds of objects with complicated shapes can be approximated by appropriate combination of multiple ellipses.
The number of ellipses generally depends on the complexity of the object shape; however, on the basis of preliminary experiments we decided to use three ellipses.
Methods
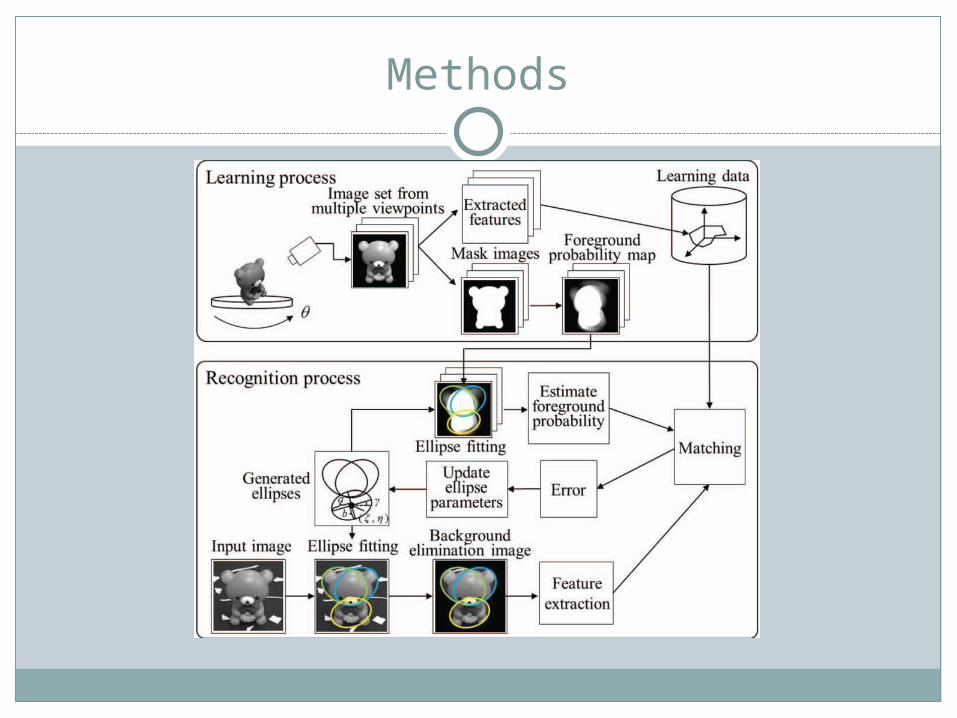
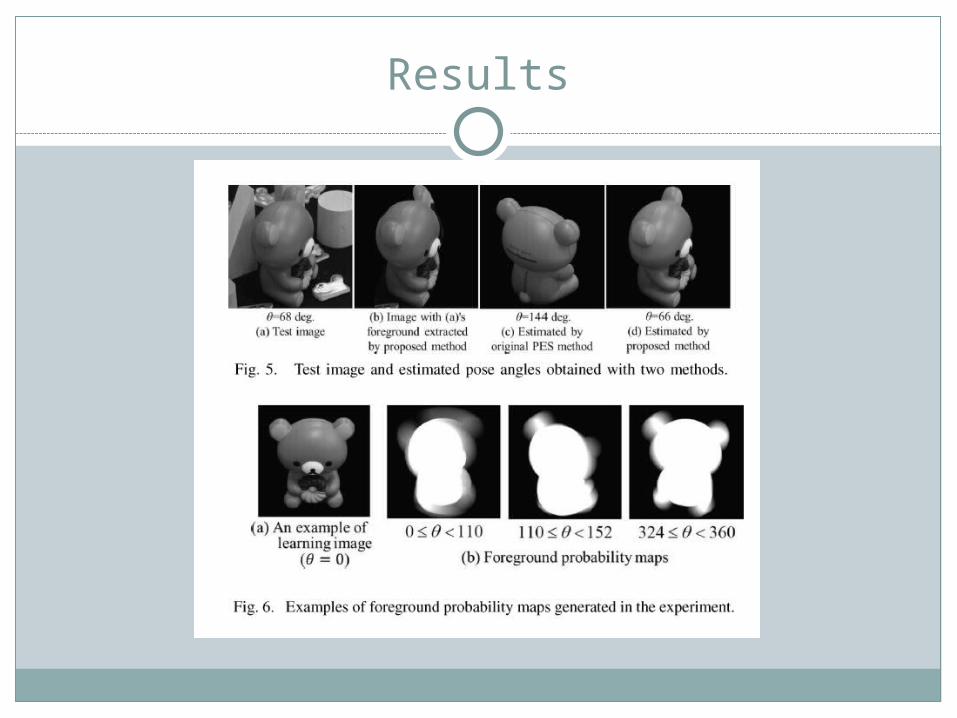
In the proposed method, the foreground probability map is generated from learning images and is used for efficient matching.
The map is an image that represents the foreground probability of each pixel.
Using it enables misfit of ellipses to the background elements to be effectively suppressed.
Methods
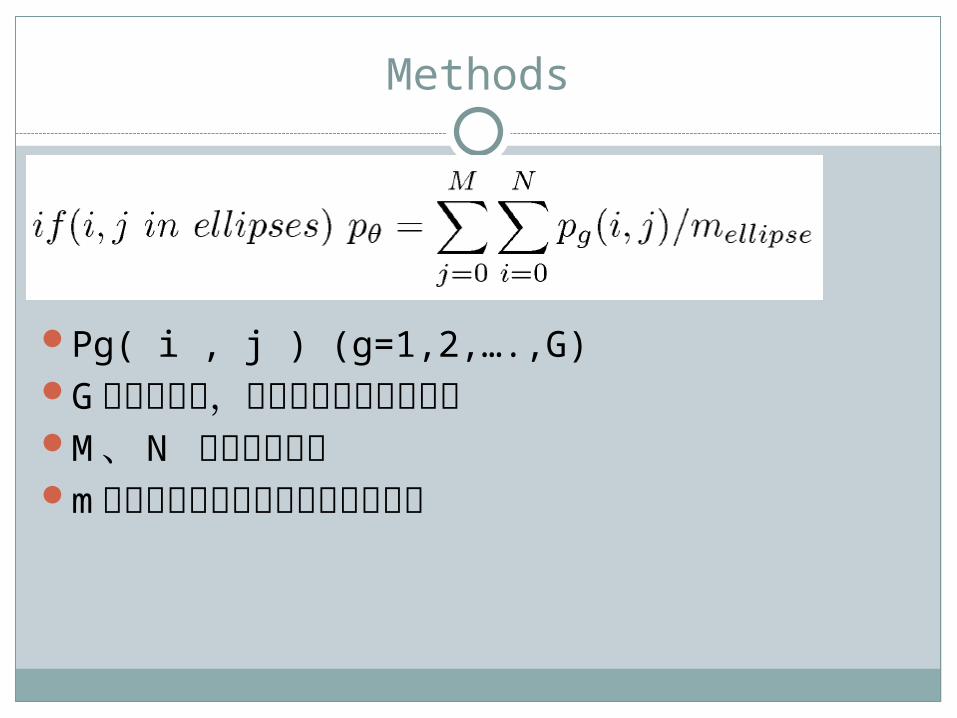
Pg( i , j ) (g=1,2,….,G) G 為組的數目,組內的圖有相似的外觀M 、 N 為圖型的尺寸m 是從輸入圖像中所提取的橢圓面積
Methods
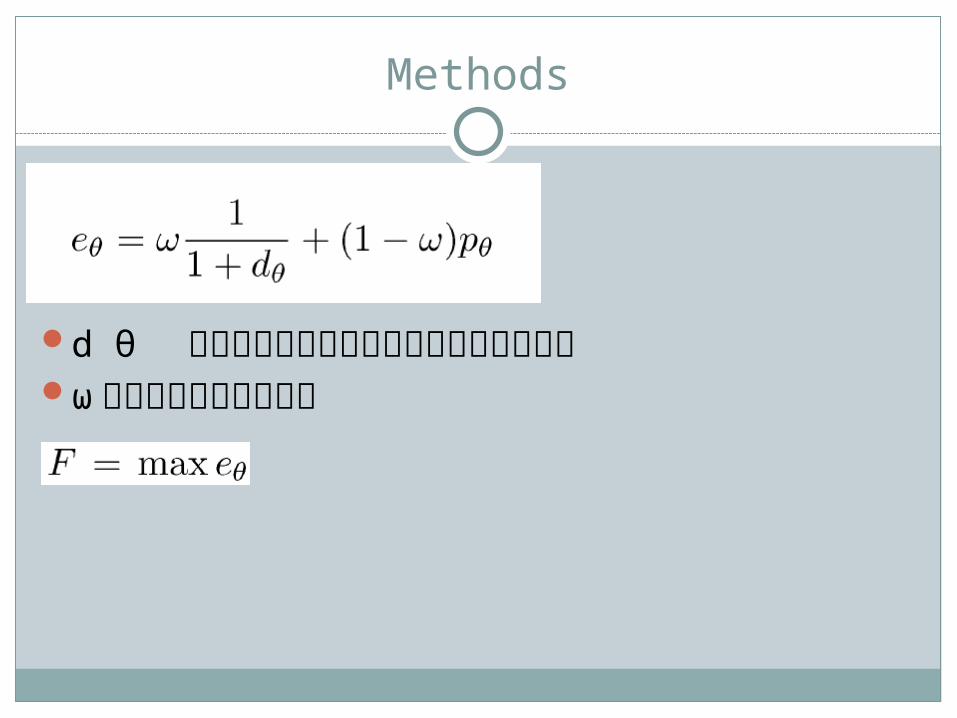
d θ 是歐幾里得準則在兩張圖之間的特徵空間ω是通過實驗加權的係數
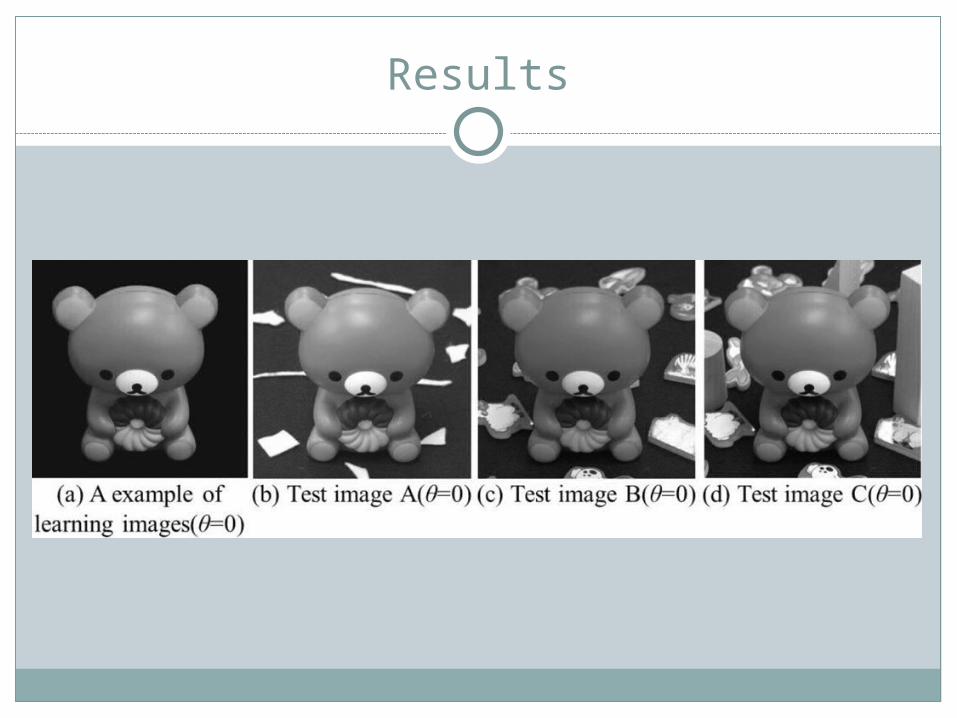
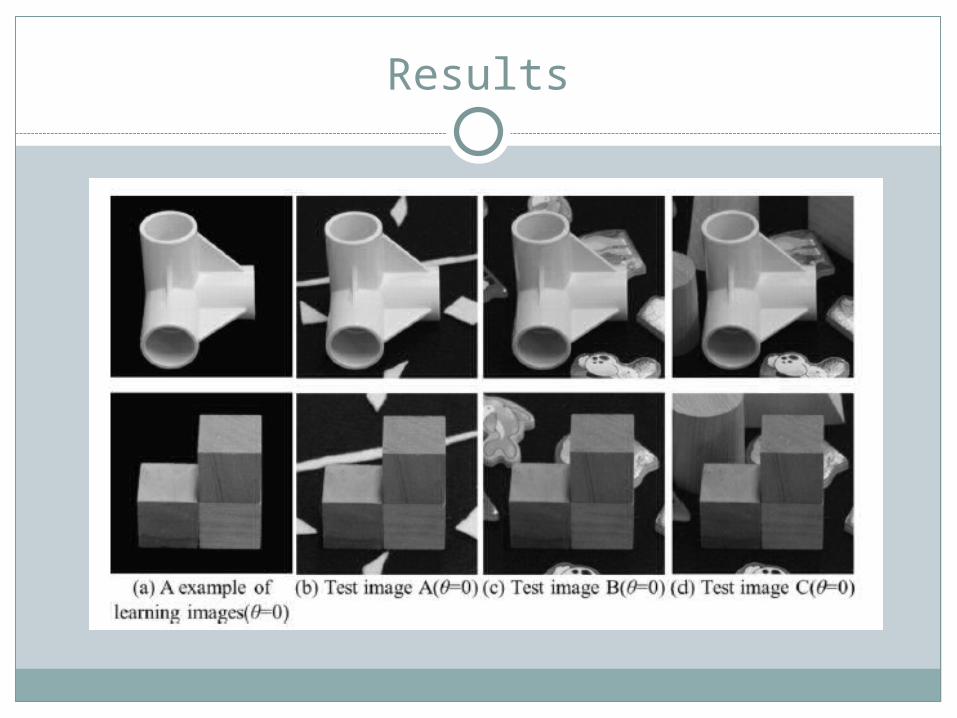
Results
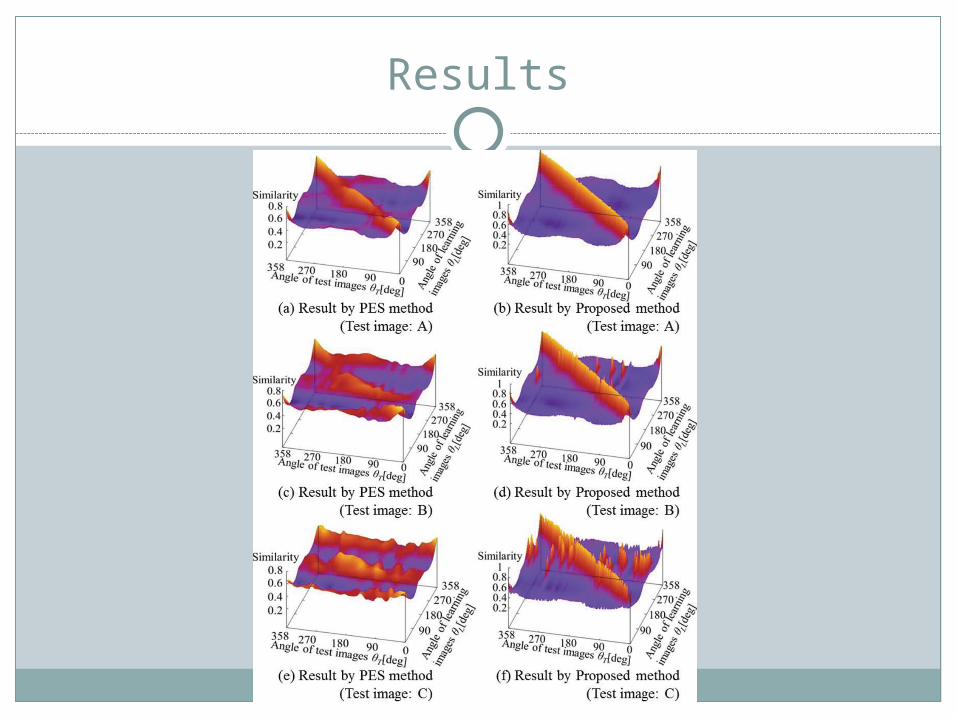
Results
Results
Results
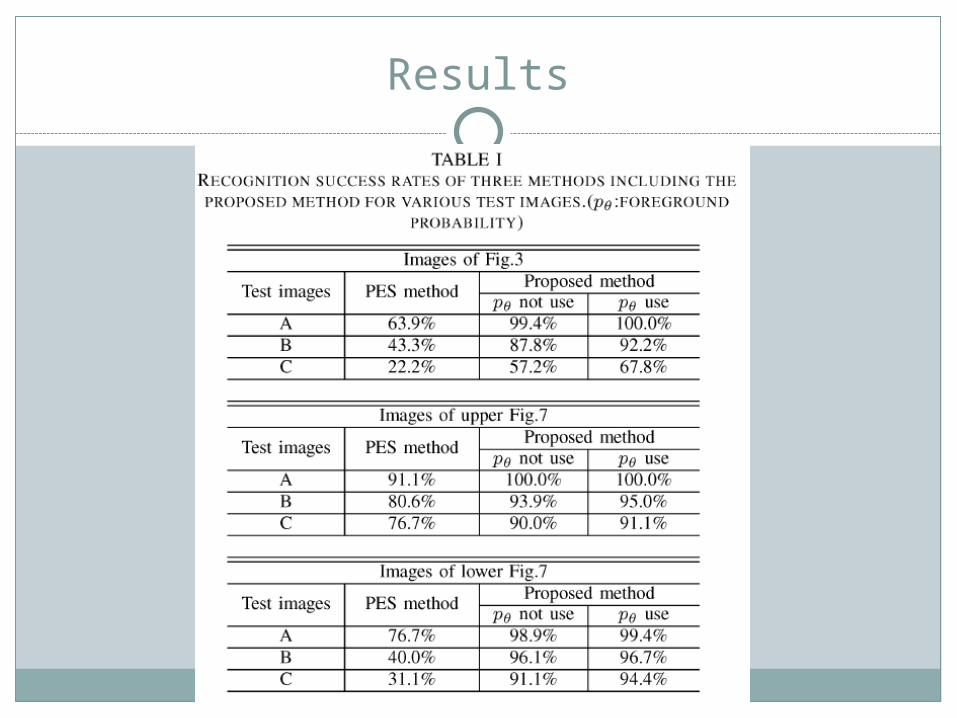
Results