Embed Size (px)
Citation preview

Рубцов И.В.Саламаха П.Н.
CМ-7 МГТУ им. Н.Э. Баумана
2005
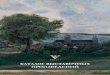
Создание автоматической системы управления оружием мобильного робототехнического
комплекса на базе системы технического зрения
Постановка задачи
исследования
Структура и состав исследуемой системы
Критерии качества исследуемой системы
Тракт обработки радиолокационной информации
Подсистема наведения и стабилизации оружия
Пример синтеза синергетического регулятора
Зона ответственности
Мобильный робототехнический комплекс
Система технического зрения
Цели
Постановка задачи исследования

Рубцов И.В.Саламаха П.Н.
CМ-7 МГТУ им. Н.Э. Баумана
2005
Создание автоматической системы управления оружием мобильного робототехнического
комплекса на базе системы технического зрения
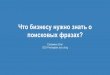
Состав перспективной многоканальной системы технического зрения
тепловизионный канал (3 – 5 мкм); оптико-электронный канал (8 – 12 мкм); телевизионный канал; радиолокационный канал миллиметрового диапазона;
Обобщенная структура автоматической системы управления оружием
Систематехнического
зрениня
Механическое воздействие
Векторкоородинат
целиВнешняясреда
Вектор оценоккоородинат
цели
ZZ
Подистеманаведния и
стабилизацииоружия
Постановка задачи
исследования
Структура и состав исследуемой системы
Критерии качества исследуемой системы
Тракт обработки радиолокационной информации
Подсистема наведения и стабилизации оружия
Пример синтеза синергетического регулятора

Рубцов И.В.Саламаха П.Н.
CМ-7 МГТУ им. Н.Э. Баумана
2005
Создание автоматической системы управления оружием мобильного робототехнического
комплекса на базе системы технического зрения
эф
прп
R
P
2
2
1
1
0
)()( 110
X
dXHXwHXXPD
0
)()( 000
X
dXHXwHXXPF
Общий критерий качества автоматической системы управления оружием
Вероятность поражения цели неуправляемым снарядом
псуостзпргде 2222 ,
Вероятность ложного обнаружения
Вероятность правильного обнаружения
Критерии качества связанные с радиолокационным каналом системы технического зрения
0 qX0F
D
X
)( 0HXw )( 1HXw
Постановка задачи
исследования
Структура и состав исследуемой системы
Критерии качества исследуемой системы
Тракт обработки радиолокационной информации
Подсистема наведения и стабилизации оружия
Пример синтеза синергетического регулятора

Рубцов И.В.Саламаха П.Н.
CМ-7 МГТУ им. Н.Э. Баумана
2005
От приемно-передающего
тракта
Вектор оценоккоородинат
цели
ZКорреляционно-фильтроваяобработка
Принятиерешения
Измерениевектора
координатZ
iU
Оценкадисперсии
помехи N
Формированиерешающейстатистики
Формирование порога(при фикрированной F)
X0
nX nX
Создание автоматической системы управления оружием мобильного робототехнического
комплекса на базе системы технического зрения
Матрицаобнаружения
Подматрицасопровождения
r
V
1
0
2)(
N
i
iN
nj
in eUiwX
Тракт обработки информации когерентного радиолокационного канала
Корреляционно-фильтровая обработка
Методы измерения скорости и дальности метод дискриминационных характеристик метод «центра масс»
Методы измерения углов места и азимута метод дискретного сканирования метод конического сканирования ДН антенны
Постановка задачи
исследования
Структура и состав исследуемой системы
Критерии качества исследуемой системы
Тракт обработки радиолокационной информации
Подсистема наведения и стабилизации оружия
Пример синтеза синергетического регулятора

Рубцов И.В.Саламаха П.Н.
CМ-7 МГТУ им. Н.Э. Баумана
2005
Создание автоматической системы управления оружием мобильного робототехнического
комплекса на базе системы технического зрения
Синергетическийрегулятор
Регулятормомента
Вектор оценоккоородинат
цели
ZЗадание на
моментОбъект
),,...()( 1 kknk gMxxftx
0)()(*
XXT nnn
Структура подсистемы наведения оружия
Основные этапы синтеза синергетического регулятора методом АКАР
вывод динамической модели объекта с помощью уравнения Лагранжа второго рода:
и запись этой модели в форме Коши:формирование многообразия (макропеременной), отражающего цель управления:
формирование функционального уравнения, описывающего поведение системы на многообразии:
, тогда через
задnnn xxXfX _)()(
решение функционального уравнения относительно управляющего воздействия Mn:
,)53( nTt .0)( Xn
i
ii q
L
q
Ldtd
Постановка задачи
исследования
Структура и состав исследуемой системы
Критерии качества исследуемой системы
Тракт обработки радиолокационной информации
Подсистема наведения и стабилизации оружия
Пример синтеза синергетического регулятора

Рубцов И.В.Саламаха П.Н.
CМ-7 МГТУ им. Н.Э. Баумана
2005
Создание автоматической системы управления оружием мобильного робототехнического
комплекса на базе системы технического зрения
Постановка задачи
исследования
Структура и состав исследуемой системы
Критерии качества исследуемой системы
Тракт обработки радиолокационной информации
Подсистема наведения и стабилизации оружия
Пример синтеза синергетического регулятора
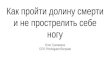
Пример синтеза синергетического регулятора методом АКАР и результаты моделирования
1m
бm
2m
X
Y
цL
1
1Y
бL 1L
2L
0
ц0 ;M)L*mL*m(*)sin(**
)L*mL*(m*)cos(*
)L*mL*mL*(m*
1p2m1111
p2m111
2p2
2m1
2бб1
xxy
xy
x
111 зx
0** 11112
TT
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.05
0.1
t
X1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8-5
0
5
10x 10
4
t
M1
Объект управления башня +пушка в горизонтальной плоскости
Уравнение Лагранжа второго рода:
Многообразие :
Функциональное уравнение второго порядка:
Выражение для момента M1:
2
12b
2m1
2p2312p1m
22
12b
2m1
2p2412p1m
12
2b
2m1
2p2
1
*L*L*L**)cos(**L*L
**L*L*L**)sin(**L*L
*L*L*L*
Tmmmxxmm
xT
Tmmmxxmm
xT
mmmM
зb
b
b