Embed Size (px)
DESCRIPTION
第七章 LTI 离散时间系统在变换域中的分析. 主要内容: 基于幅度特征的传输函数分类 理想幅度响应数字滤波器、有界实传输函数、全通传输函数 基于相位特征的传输函数分类 零相位传输函数、线性相位传输函数、最小相位与最大相位传输函数 线性相位 FIR 传输函数类型. 传递函数的类型. 一个线性时不变的数字传递函数序列的时域分类是基于它自身脉冲响应的长度 : — 有限脉冲响应传递函数( FIR ) — 无限脉冲响应传递函数( IIR ) 就具有频选功能的数字传递函数而言,可以分为两类: —— 基于幅度函数 H(e i ) 的 类型 - PowerPoint PPT Presentation
Citation preview

第七章
LTI 离散时间系统在变换域中的分析

主要内容:基于幅度特征的传输函数分类理想幅度响应数字滤波器、有界实传输函数、全通传
输函数基于相位特征的传输函数分类零相位传输函数、线性相位传输函数、最小相位与最
大相位传输函数线性相位 FIR 传输函数类型

传递函数的类型•一个线性时不变的数字传递函数序列的时域分类是基于它自身脉冲响应的长度: — 有限脉冲响应传递函数( FIR ) — 无限脉冲响应传递函数( IIR )
•就具有频选功能的数字传递函数而言,可以分为两类: —— 基于幅度函数 H(ei) 的类型—— 基于相位函数 () 的类型

7.1 基于幅度特性的传输函数
•一般的分类是基于理想幅度响应•让具有某些频率的信号分量没有失真通过,滤波器的频响在对应频率下等于 1 ;•完全阻止其他频率的信号分量,在这些频率下滤波器的频率响应等于 0 。
—— 频率响应的值取 1 的频率范围叫作通带—— 频率响应的值取 0 的频率范围叫作阻带

7.1 基于幅度特性的传输函数7.1.1 理想滤波器( ideal filters )
02
11
j
j
eH
eH
、阻带有
、通带有理想滤波器特点:

• 低通滤波器 : 通带 : 0≤ω≤ωc
阻带 : ωc≤ω≤π
• 高通滤波器 : 通带 : ωc≤ω≤π
阻带 : 0≤ω≤ωc
• 带通滤波器 : 通带 : ωc1≤ω≤ωc2
阻带 : 0≤ω<ωc1 和 ωc2<ω<π
• 带阻滤波器 : 阻带 : ωc1<ω<ωc2
通带 : 0≤ω≤ωc1 和 ωc2≤ω≤π
理想滤波器
频率 c , c1 , c2 被称为截止频率。理想滤波器在通带幅度响应为 1 ,在阻带幅度响应为 0 。并且它的相位都是 0 。

理想滤波器
sin[ ] c
lp
nh n n
n
•脉冲响应并非绝对可和的,因此,相应的传递函数并非 BIBO 稳定的 •hLP[n] 是非因果的,是双边无限长的

• 理想滤波器的单位冲激响应具有以下特性:双边无限长,非因果脉冲响应,不是绝对可和的
• 因此,理想滤波器不能用有限阶数的传递函数的线性时不变滤波器来实现
理想滤波器
•为了得到稳定的、可实现的传递函数,频率响应的要求须适当地加以放宽:在通带与阻带间引入一过渡带;•这要求幅度响应从通带时的最大值慢慢地衰减到阻带时的 0 。

•低通滤波器的典型 幅 度 响 应 说 明如下所示:
可实现的滤波器•为了得到稳定的、可实现的传递函数,频率响应的要求须适当地加以放宽:在通带与阻带间引入一过渡带;•除此之外,允许幅度响应在通带和阻带中有一定程度的波动

1jH e
则称为有界实传输函数( bounded real (BR) transfer function )
如果 对所有1jeH
则称为无损有界实传输函数( lossless bounded real (LBR) transfer function )
定义:因果、稳定、实系数的传输函数 H(z) ,如果满足
7.1.2 有界实传输函数
对的所有值

1|)(| jeH 对于一切 ω 成立
若数字滤波器的传输函数 H(z) 是 BR 函数,用 x[n]和 y[n] 表示数字滤波器的输入和输出,
7.1.2 有界实传输函数
2 2( ) ( )j jY e X e 有
其中 X(ejω) 和 Y(ejω) 表示它们的 DTFTs
nn
nxny 22 ][][
根据 Parseval 关系可知

• 因此 , 对于一切有限输入而言 , 输出量小于或等于输入量。
• 这种关系表明有界实传递函数特点的数字滤波器可以看作被动结构。
1|)(| jeH若 , 则输出量等于输入量,这种数字滤波器就是所谓的无损系统 (LBR)
7.1.2 有界实传输函数
• 具有对系数不敏感的数字滤波器实现的关键就是 BR 和 LBR 传递函数

• 例 7.1: 考虑因果 IIR 传递函数
-1( ) , 0 | | 1
1-
KH z
z
K 是一个实数
它的幅度平方函数如下:2
2 -12
| ( ) | ( ) ( ) |(1 ) 2 cos
j
j
z e
KH e H z H z
7.1.2 有界实传输函数
当 α>0,
•在ω=0 时 |H(ejω)|2 的最大值为:•在ω=π 时 |H(ejω)|2 最小值为:
2 2(1 )K 2 2(1 )K

当 α<0,
•在ω=时 |H(ejω)|2 的最大值为:•在ω=0 时 |H(ejω)|2 最小值为:
2 2(1 )K 2 2(1 )K
7.1.2 有界实传输函数
• 因此 , 当 K=±(1-α) 时
-1( ) , 0 | | 1
1-
KH z
z
是 BR 函数当 α=±0.5 , K 为产生 H ( z )时所选的值时 BR 函数的幅度响应图 如下所示

有界实传递函数
高通滤波器低通滤波器

定义: 无限脉冲响应 IIR 的传递函数 A(z) 对于
一切频率而言,有单位幅度响应如下:2
( ) 1,jA e 一切
MM
MM
MMMM
Mzdzdzd
zzdzddzA
11
11
11
11
1 ...
...)(
这种函数被称为全通传递函数• 一个 M阶有序因果实系数全通传递函数具有如下形式:
7.1.3 全通传递函数

• 如果我们把 AM(z) 的分母多项式记作 DM(z) :
MM
MMM zdzdzdzD
11
111 ...)(
)()()(
zDzDz
MM
MM
zA1
• 从上式中可以看到,若 z=rejφ 是全通传递函数的极点 , 则它也有一个零点 z=(1/r)e-jφ
则 AM(z) 可以写成下式 :
7.1.3 全通传递函数

•我们使用符号 表示 M 阶多项式 D
M(z)的镜像多项式 , 即
( ) ( )MM MD z z D z
( )MD z
7.1.3 全通传递函数
•实系数全通传递函数的分子可以说是分母多项式的镜像 , 反之亦然 .
)()()(
zDzDz
MM
MM
zA1

• 表达式
)()()(
zDzDz
MM
MM
zA1
321
321
3 2.018.04.01
4.018.02.0)(
zzz
zzzzA
表明实系数全通系统函数的极点和零点在 Z 平面上是镜像对称的
7.1.3 全通传递函数

• 为了说明 |AM(ejω)|=1 我们看到
)(
)(11)(
zD
zDzM
M
MM
zA
)(
)()(
)(11
1)()(
zD
zDzzDzDz
MMM
MM
M
MM
zAzA
1)()(|)(| 12
jezMMj
M zAzAeA
进而有
•因此
7.1.3 全通传递函数

• 现在 , 因果稳定系统的传递函数的极点一定在 Z 平面上的单位圆内
• 因此 , 因果稳定的全通函数的所有零点一定是在单位圆外,且与单位圆内的极点成镜像对称的
7.1.3 全通传递函数

• 下图给出了三阶全通传递函数的相位的基值:
321
321
3 2.018.04.01
4.018.02.0)(
zzz
zzzzA
•可以看到波形在相位 θ(ω) 为 2π时 出现了间断
7.1.3 全通传递函数

• 如果我们通过去除间断点将相位展开,我们将得到展开的相位函数 θc(ω) ,如下所示
注意 : 展开的相位函数是 ω的连续函数
7.1.3 全通传递函数
结论:任何的因果稳定全通系统的相位展开函数就是 ω 的非正连续函数

7.1.3 全通传递函数
的非正连续函数函数为函数,去弯折后的相位、对任意因果稳定全通
、
为零点为极点,则即如果零点和极点镜像对称,、
式分子为分母的镜像多项、
4
113
12
1
21
jMMM
jjM
M
eAzAzA
er
zrezzA
zA
)()()(
zDzDz
MM
MM
zA1

1 、因果稳定的全通传输函数为 LBR ( lossless bounded response )传输函数
1 1
1 1
1 1
M
z
A z z
z
7.1.3 全通传递函数因果稳定全通函数的性质:
2 、全通函数 的幅度:

3 、定义全通函数的群延时为
jc
de
d
0
d M
其中 是 的相位展开函数,稳定全通函数的 是递减函数,因此有:
c arg jMA e
0 0 , c
可以证明:
随着从 0 变到, M 阶全通函数相位变化为M

全通传递函数
• 因为 |A(ejω)|=1, 则
|)(||)()(| jjj eGeAeG
G(z) A(z)
整体的群延时是 G(z) 和 A(z)群延时的叠加

全通传递函数• 例如 : 下图就给出了一个四阶有序的椭圆
滤波器的群延时,这种滤波器具有以下指标: : ωp=0.3π, δp=1dB, δs=35dB

全通传递函数• 下图给出了原始椭圆滤波器的群延时,这
种滤波器与一个被用于均衡通带内的群延迟的八阶全通单元相级联

• 传递函数的另一种分类是关于它的相位特性的
• 在许多应用中 , 被设计的数字滤波器不能扭曲带有带通频率的输入信号的相位,这是必要的
7.2 基于相位特性的传输函数分类

7.2.1 零相位传递函数
• 为了设计具有零相位的滤波器,一种避免任何相位失真的方法就是让滤波器的频率响应是实数和非负的
• 但是,设计一种有零相位的因果数字滤波器则是不可能的

• 对于有限长输入信号的非实时处理,通过放宽因果关系的要求可以很容易的实现零相位滤波器的方法
• 下图就是一个零相位的滤波方案
x[n] v[n] u[n] w[n]H(z) H(z)
u[n]=v[-n], y[n]=w[-n]
7.2.1 零相位传递函数
用 X(ej) ,V(ej) ,U(ej) ,W(ej) 和 Y(ej) 表示x[n], v[n], u[n], w[n], 和 y[n] 的 DTFTs

V(ej)= H(ej)X(ej) , W(ej)=H(ej)U(ej)
U(ej)= V*(ej), Y(ej)= W*(ej)• 结合上面的等式,我们可以得到• Y(ej) = W*(ej) = H*(ej)U*(ej)
= H*(ej)V(ej) = H*(ej)H(ej)X(ej)
= |H(ej)|2X(ej)• 这是个有频率响应 |H(ej)|2 的零相位滤波器
x[n] v[n] u[n] w[n]H(z) H(z)
u[n]=v[-n], y[n]=w[-n]
7.2.1 零相位传递函数

• 函数 fftfilt 能够实现零相位滤波
• 就非零相位响应的因果传递函数而言 , 通过以下方式可以避免相位失真,那就是使传递函数在所需的频带内有单位幅度响应和线性相位特性
7.2.1 零相位传递函数

7.2.2 线性相位传递函数线性相位滤波器最一般的类型都有如下的频率响应
( )j j DH e e
在 到 之间具有线性相位特性0 2
即: ( ) 1 ( )jH e D

7.2.2 线性相位传递函数•对于输入 ,该滤波器的输出y[n] 为:
[ ] j nx n Ae
( )[ ] j D j n j n Dy n Ae e Ae
•设 xa(t) 和 ya(t) 表示连续时间信号, x[n] 和 y[n] 是该信号在 t = nT 时的抽样;
•则 xa(t) 和 ya(t) 间的延时正好是数量为 D的群延时

• 若 D是整数 , 则 y[n] 和 x[n] 是相等的 ,但延时 D 个样本
• 若 D不是整数 , 则 y[n] 被延时一个小数部分因而不等于 x[n]
7.2.2 线性相位传递函数
结论: 若想要不失真地传输信号,要求: 传递函数应在感兴趣的频带内具有单位幅度响应和线性相位响应

• 右图给出了在通频带中有线性相位特性的低通传递函数的频率响应
7.2.2 线性相位传递函数

)( j
LP eH
c
cnj oe
,00,
7.2.2 线性相位传递函数•由于在阻带中的信号分量是阻断的 , 其相位响应可能是任一种形状•例如 – 决定具有线性相位响应的理想低通滤波器的脉冲响应 :
nnnnn
nho
ocLP ,
)()(sin
][可得:•是非因果的且 是双边无限长脉冲响应序列,因此是不可实现的

• 通过将无限长脉冲响应序列截短成有限长序列,可产生一个近似于理想低通滤波器且可实现的滤波器
• 依靠所选的 n0 值 ,这种经截短得到的滤波器可以是线性相位的或者不是线性相位的
7.2.2 线性相位传递函数

• 若我们选取 n0= N/2 , N为一个正整数 , ,则截短并移位后的近似值
NnNnNn
nh cLP
0,
)2/()2/(sin
][^
将是一个长度为 N+1 的因果线性相位FIR 滤波器
7.2.2 线性相位传递函数

• 通过函数 sinc 对两个不同的 N值产生的该滤波器的系数如下图所示
7.2.2 线性相位传递函数

• 由于两图中脉冲响应系数的对称性 , 截短后的近似频率响应表达式为:
)(][)( 2/
0
LPNj
N
n
njLP
jLP HeenheH
^^
被称为零相位响应或幅度响应 ,它是的的的的
)(LPH
7.2.2 线性相位传递函数

7.2.3 最小相位和最大相位传递函数
• 考虑两个一阶传递函数 :
11121
bazHzH az
bzazbz ,,)(,)(
• 这两个传递函数在单位圆内 z=-a处都有一个极点,且都是稳定的•H1(z) 的零点 z=-b , 在单位圆内 • H2(z) 的零点 z=-1/b ,在 H1(z) 的零点的镜像对称处。•这两个传递函数都有一个同样的幅度函数

• 下图给出了这两个传递函数的极零点图
H1(z) H2(z)
7.2.3 最小相位和最大相位传递函数

• 两个传递函数都有一个同样的幅度函数:
1122
111 )()()()( zHzHzHzH
cos
sin1cos
sin11 tantan)](arg[ ab
jeH
cos
sin1cos1
sin12 tantan)](arg[ ab
bjeH
相应的相位函数如下
7.2.3 最小相位和最大相位传递函数

• 下图给出了两个传递函数在 a = 0.8 和 b = -0.5处的展开的相位响应
7.2.3 最小相位和最大相位传递函数
•从图中可知 H2(z) 相对于 H1(z)会存在相位滞后

1
2
H ( ) A( )
bz+1 z+b bz+1H ( )
z+a z+a z+bz z
z 的 的 的 的的 的 的的
7.2.3 最小相位和最大相位传递函数
•A(z) 个稳定的全通函数
•H1(z) 和 H2(z) 的相位函数因此也有如下关系 :
2 1arg ( ) arg ( ) arg ( )j j jH e H e A e
•H2(z) 相对于 H1(z) 的相位滞后特性也能从下式中看出

7.2.3 最小相位和最大相位传递函数•H1(z) 和 H2(z) 的相位函数因此也有如下关系 :
2 1arg ( ) arg ( ) arg ( )j j jH e H e A e
因为 : 一个稳定的一阶全通函数的展开的相位函数是 ω 的负函数 ,
由此可知 H2(z) 相对于 H1(z)确实存在相位滞后•推广:所有零点都在单位圆内的因果稳定传递函数称为最小相位传递函数

7.2.3 最小相位和最大相位传递函数•令 Hm(z) 是最小相位传递函数,而 H(z) 是另外一个因果稳定传递函数,且满足:
( ) ( ) ( )mH z H z A z
( ) ( )j jmH e H e
这两个函数可表示为:
其中 A(z) 是稳定的全通传递函数

•所有零点都在单位圆内的因果稳定传递函数称为最小相位传递函数;
•所有零点都在单位圆外的因果稳定传递函数称为最大相位传递函数
•零点存在于单位圆内和单位圆外的因果稳定传递函数称为混合相位传递函数
7.2.3 最小相位和最大相位传递函数

• 例如 : 考虑混合相位传递函数
-1 1
1 1
2(1+0.3z )(0.4 )H(z)=
(1 0.2 )(1 0.5 )
z
z z
•我们可将 H(z) 写成
-1 -1 1
-1 -1 1
Minimum-phasefunction Allpass function
2(1+0.3z )(1-0.4z ) 0.4H(z)=
(1-0.2z )(1+0.5z ) 1 0.4
z
z
的 的 的 的的 的 的 的 的 的的 的 的 的 的 的
7.2.3 最小相位和最大相位传递函数

7.3 线性相位的 FIR 传递函数•设计一个线性相位的 IIR 传递函数几乎是不可能的; •设计一个恰巧具有线性相位响应的 FIR 传递函数总是可能的;•我们现在导出具有实脉冲响应 h[n] 的线性相位 FIR 传递函数 H(z) 的形式;•考虑长度为 N+1 ,阶数为 N 的因果 FIR 传递函数 H(z) :
N
nnznhzH 0 ][)(

7.3 线性相位的 FIR 传递函数•若 H(z) 是线性相位的 , 它的频率响应一定有以下形式:
( )( ) ( )j j cH e e H 的
c和 β是常量, 被称为幅度响应 ,
也被称为零相位响应,它是 ω 的实函数
H( )的
对于实脉冲响应而言 , 幅度响应 |H(ejω)| 是偶函数, 即 |H(ejω)| = |H(e-jω)|

7.3 线性相位的 FIR 传递函数
(- ) ( )H H 的 的
j|H(e ) | | H( )| 的
• 由于 , 幅度响应要么是ω 的奇函数,要么是 ω偶函数 , 即
| ( ) | | ( )|jH e H 的 的
并且频率响应满足关系 :
( ) ( )j jH e H e 可等效为:
( ) [ ( ) ]( ) ( ) ( )j j c j cH e e H e H 的 的

7.3 线性相位的 FIR 传递函数( ) [ ( ) ]( ) ( ) ( )j j c j cH e e H e H
的 的
1.当 是偶函数:( )H 的
j je e 可得 0 即 或
- - ( )
0
( ) ( ) [ ]N
jc j j c n
n
H e H e h n e
的
在先前的等式中,用–ω替代ω 可得( )
0
(- ) [ ]N
j c l
l
H h l e
的

7.3 线性相位的 FIR 传递函数( )
0
(- ) [ ]N
j c l
l
H h l e
的
令 变量 l=N-n, 我们可将上式改写成
( )
0
(- ) [ ]N
j c N n
n
H h N n e
的
由于 , 则 :( ) (- )H H 的 的
( ) ( )[ ] [ ]j c n j c N nh n e h N n e

7.3 线性相位的 FIR 传递函数( ) ( )[ ] [ ]j c n j c N nh n e h N n e
上式可推出
h[n]=h[N-n], 0≤n≤N
其中 c=-N/2
因此 , 如果它有一个对称的脉冲响应,具有偶函数幅度响应的 FIR 滤波器将是线性相位的

7.3 线性相位的 FIR 传递函数( ) [ ( ) ]( ) ( ) ( )j j c j cH e e H e H
的 的
2. 当 是奇函数:( )H 的
j je e 可得 2 2 即 或
2 当 ( ) ( )j jcH e je H
的
上式可以被改写如下:
- - ( )
0
( ) - ( ) - [ ]N
jc j j c n
n
H je H e j h n e
的

7.3 线性相位的 FIR 传递函数- - ( )
0
( ) - ( ) - [ ]N
jc j j c n
n
H je H e j h n e
的
( )
0
(- ) [ ]N
j c l
l
H j h l e
的
使变量 l=N-n, 我们将上式改写为下式( )
0
(- ) [ ]N
j c N n
n
H j h N n e
的
由于 , 从上式可得(- ) - ( )H H 的 的

7.3 线性相位的 FIR 传递函数
得到如下条件: h[n]=-h[N-n], 0nN
其中 c=-N/2
因此具有奇函数的幅度响应的 FIR 滤波器若有一个反对称的脉冲响应,它将是线性相位响应
- ( ) ( )[ ] [ ]j c n j c N nh n e h N n e

• 由于脉冲响应的序列可能是偶对称的或者奇对称的 , 我们可以定义四种线性相位的 FIR 传递函数
• 对于一个奇数长度的反对称 FIR 滤波器,也即是说 N 为偶数,则
h[N/2] = 0
• 我们对以下的四种情况分别进行验证
7.3 线性相位的 FIR 传递函数

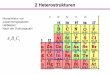
线性相位的 FIR 传递函数
Type 1: N = 8 Type 2: N = 7
Type 3: N = 8 Type 4: N = 7

线性相位的 FIR 传递函数1 型 : 具有奇数长度的脉冲响应• 在这种情况下 , 阶数 N 是偶数• 假定 N = 8
• 传递函数 H(z) 可写成
321 3210 zhzhzhhzH ][][][][)(
87654 87654 zhzhzhzhzh ][][][][][

§4.11 线性相位的 FIR 传递函数• 由于对称性 , 可得 h[0]=h[8], h[1] = h[7],
h[2] = h[6], and h[3] = h[5]• 因此,可得
)]([)]([)( 718 110 zzhzhzH45362 432 zhzzhzzh ][)]([)]([
)]([)]([{ 33444 10 zzhzzhz
]}[)]([)]([ 432 122 hzzhzzh

线性相位的 FIR 传递函数• 相应的频率响应
)3cos(]1[2)4cos(]0[2{)( 4 hheeH jj
]}4[)cos(]3[2)2cos(]2[2 hhh
• 括号里的量是的的的的 , 在 0||的区间内可以是正值,也可以是负值

线性相位的 FIR 传递函数
其中的 0 或 , 因此 , 在一般的意义下,它是 的的的的的
• 群延时为
4)(
4)( )( dd
指出四种采样的群延时是一个常量
• 这里的相位函数由下式给出

线性相位的 FIR 传递函数• 总而言之, 1 型 FIR
滤波器具有如下形式/ 2( ) ( )j jNH e e H
)(H~
2/
122
)cos(][2][N
n
NN nnhh
幅度响应 也被称为零相位响应,它具有如下形式
( )H

线性相位的 FIR 传递函数
这被作为长度为 7 的滑动平均 FIR 滤波器的近似版本
• 上面的传递函数有一个对称的脉冲响应和一个线性相位响应
][)( 62154321
21
61
0 zzzzzzzH
例如 – 考虑

线性相位的 FIR 传递函数• 具有长度为 7 的滑动平均滤波器的幅度响
应图如下所示
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
/
Mag
nitu
de
modified filtermoving-average

线性相位的 FIR 传递函数• 通过改变滑动平均滤波器的前后两个脉冲
响应系数,可得到更新的幅度响应• 它可以写成下式
)()()( 54321611
21
0 11 zzzzzzzH
这可看作是长度为 2 的 MA 滤波器与长度为 6的 MA 滤波器的级联• 因此 , H0(z) 在 z=-1 也 ( = )处有个二重零点

作业习题 7.8, 7.11, 7.12, 7.20, 7.22, 7.68
M7.1, M7.5