Embed Size (px)
DESCRIPTION
基于滑模观测器的无传感器 PMSM 驱动系统的研究 黄飞. 1. 课题来源及研究的目的意义. - PowerPoint PPT Presentation
Citation preview
基于滑模观测器的无传感器 PMSM 驱动系统的研究
黄飞
1.课题来源及研究的目的意义
永磁同步电动机 (PMSM) 是近年来发展很快的一种电机。由于转子采用永磁体,属于无刷电机的一种,具有一般无刷电机结构简单、体积小、重量轻、寿命长的优点,同时也具有效率高、运行可靠、调速性能好等优良特性,有利于电机系统向小型轻量化、高性能、高效节能方向发展。但是传统的永磁同步电动机的驱动控制系统,需要有码盘、旋转变压器和测速发电机之类的机械传感器来检测转子的磁极位置和电机的速度。机械传感器的存在增加了控制系统的体积和成本,降低了系统的可靠性,同时也限制了永磁同步电动机在一些特殊场合的推广应用。
为了克服机械传感器给电机系统带来的缺陷,研究开发一种成本低、可靠性好、维护简单的无位置和速度传感器的控制方法,便成了电机控制技术领域中的研究热点之一,这种控制方法称之为无传感器控制技术。具体来说,就是取消位置和速度传感器,通过检测电机绕组中的电压、电流等信息,采用各种不同的估计方法计算出转子位置和速度信号,生成所需控制信号,用于控制功率器件的导通和关断,从而实现对电机的驱动控制。
无传感器永磁同步电动机驱动控制系统具有以下优点 :
(1) 电机的体积和成本下降。(2) 电机系统的可靠性提高。(3) 适用于温度、湿度、和振动等有特殊要求的
场合。
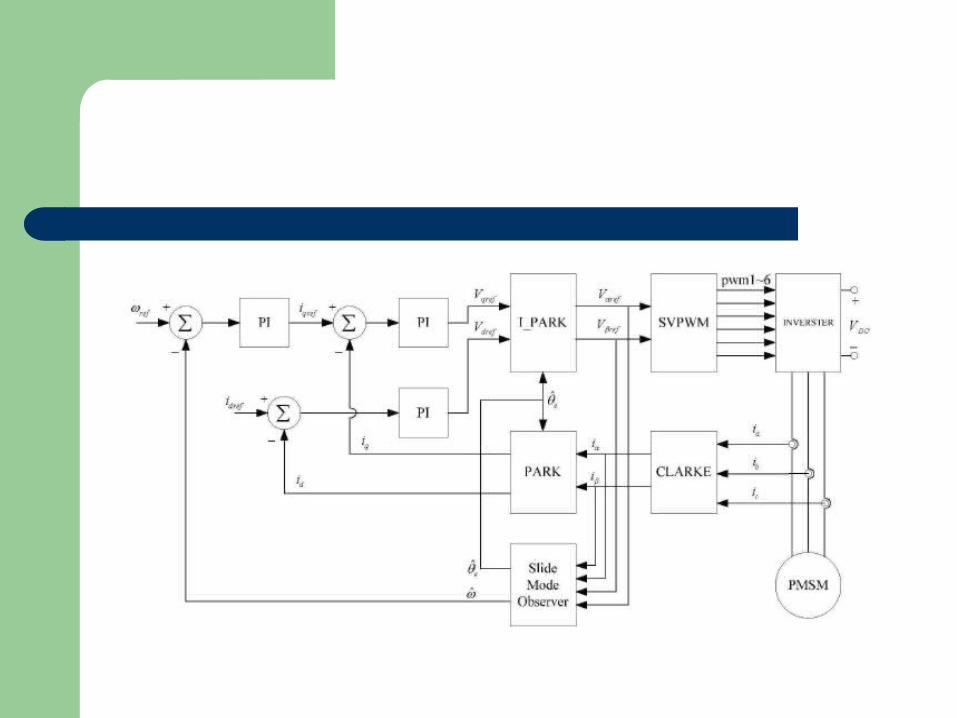
2.基于滑模观测器的 PMSM模型及矢量控制方案
滑模变结构控制的基本问题可以表示如下: 假设控制系统
需要确定切换函数 :
u x
s x cx
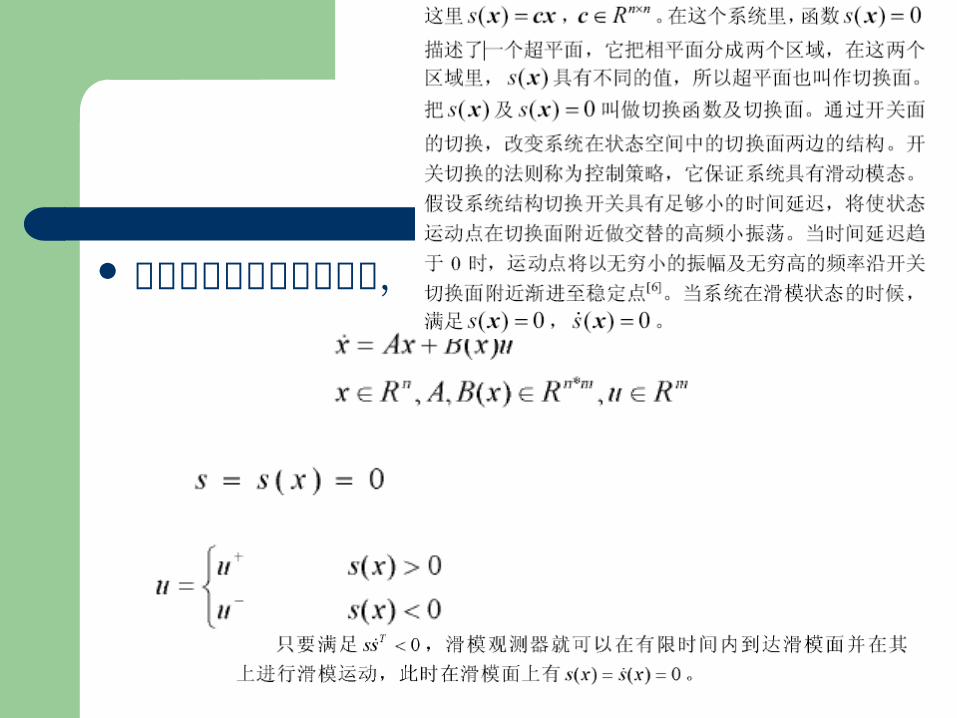
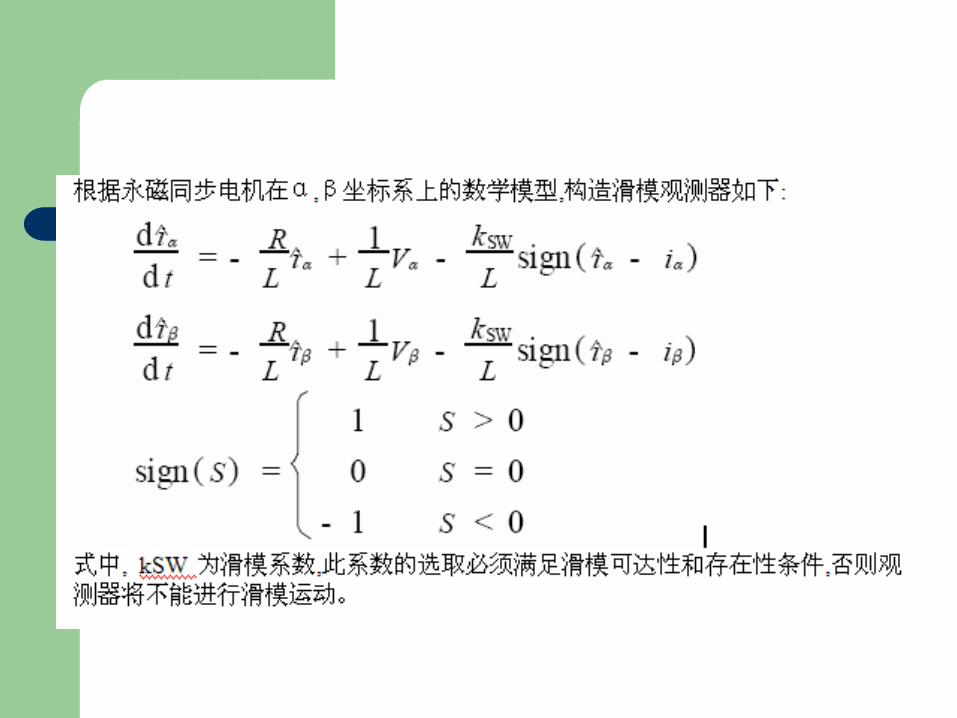
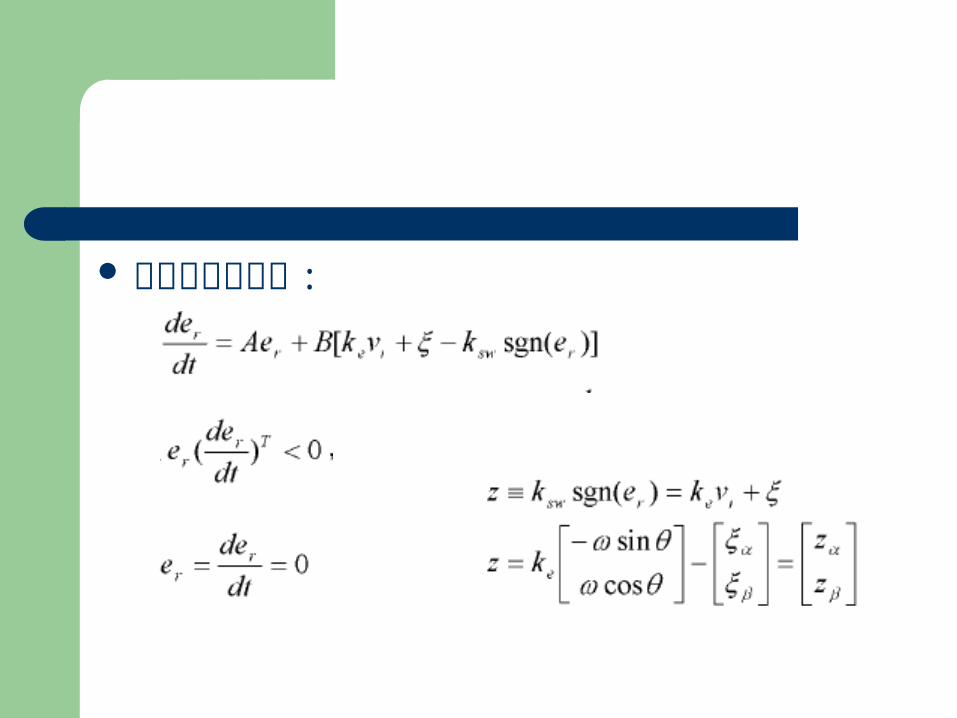
根据滑模变结构控制理论,构造一个滑模观测器 :
PMSM模型
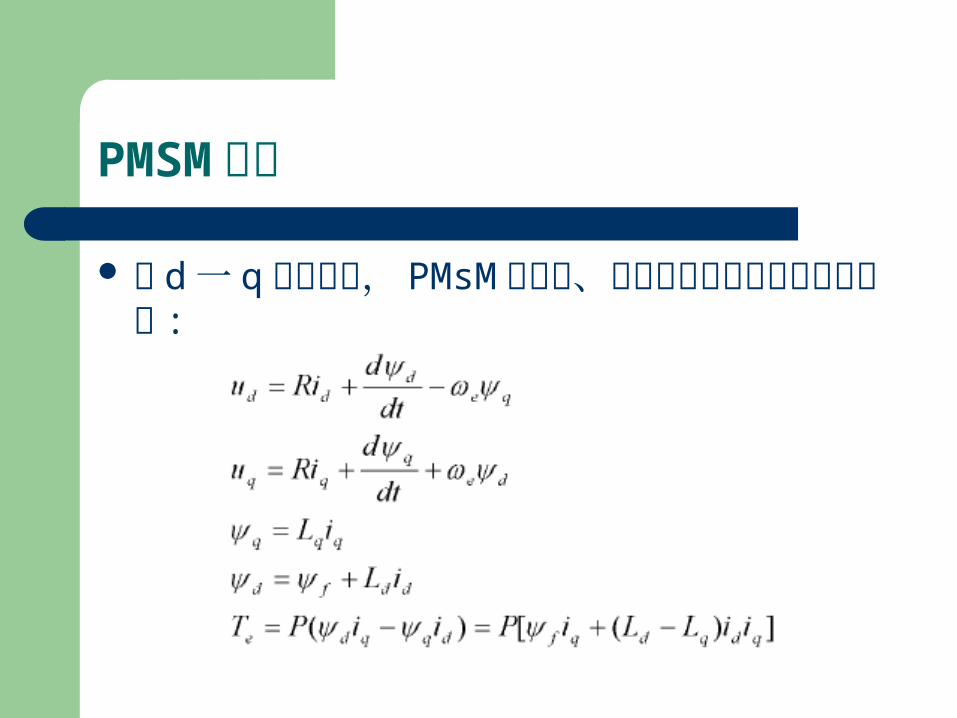
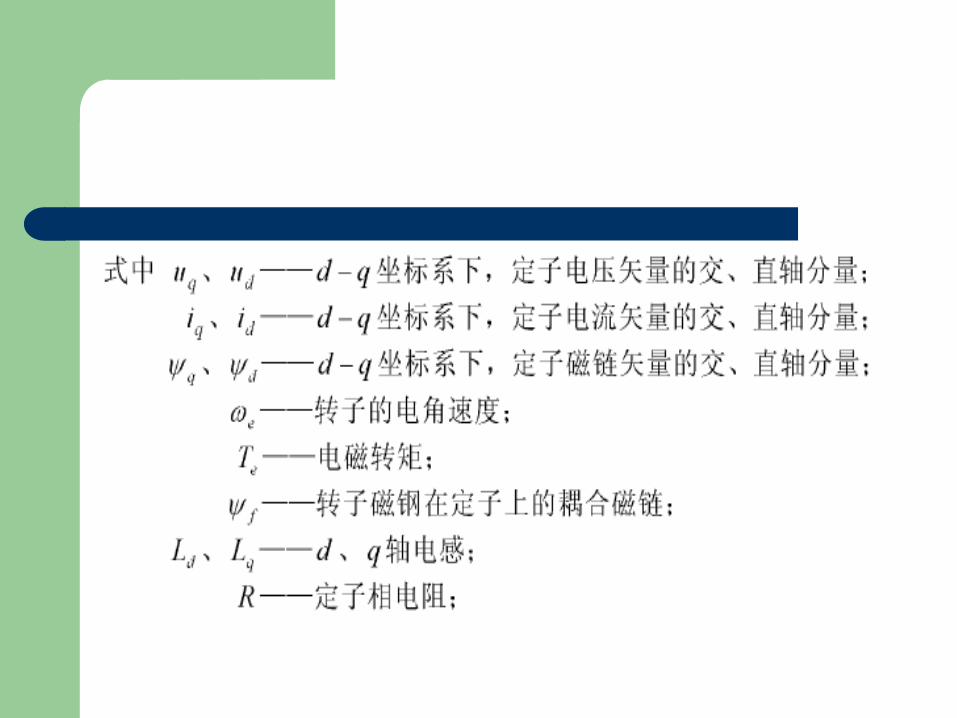
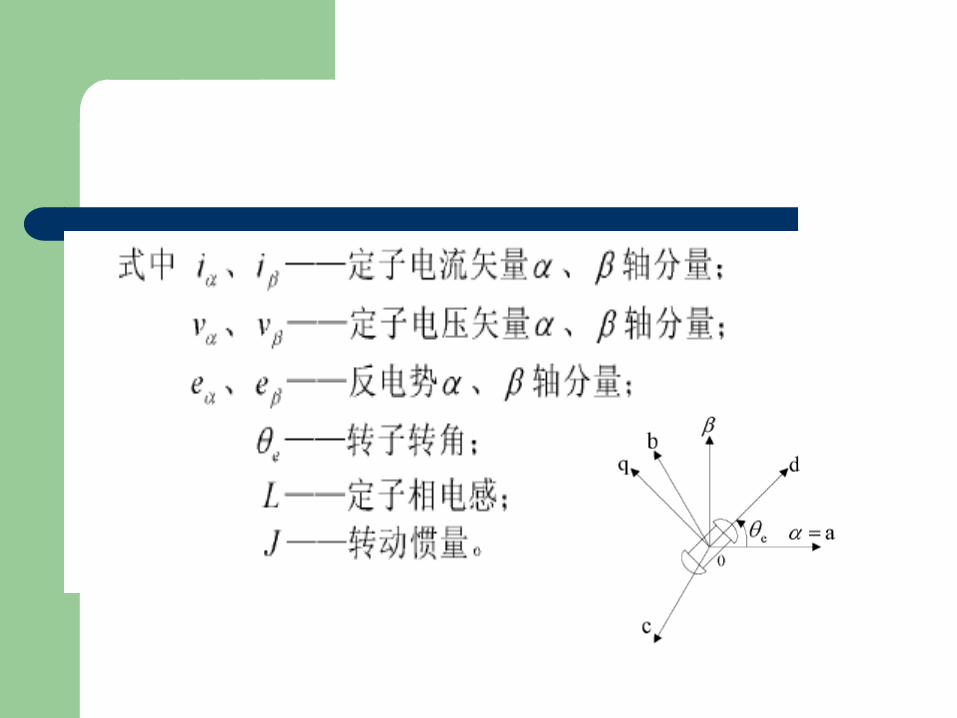
在 d 一 q 坐标系下, PMsM 的电压、磁链和电磁转矩方程可表示为 :
控制目标 :
1. 滑动模态存在 2. 满足可达性条件 3. 滑模运动渐进稳定并具有良好的动态品质。
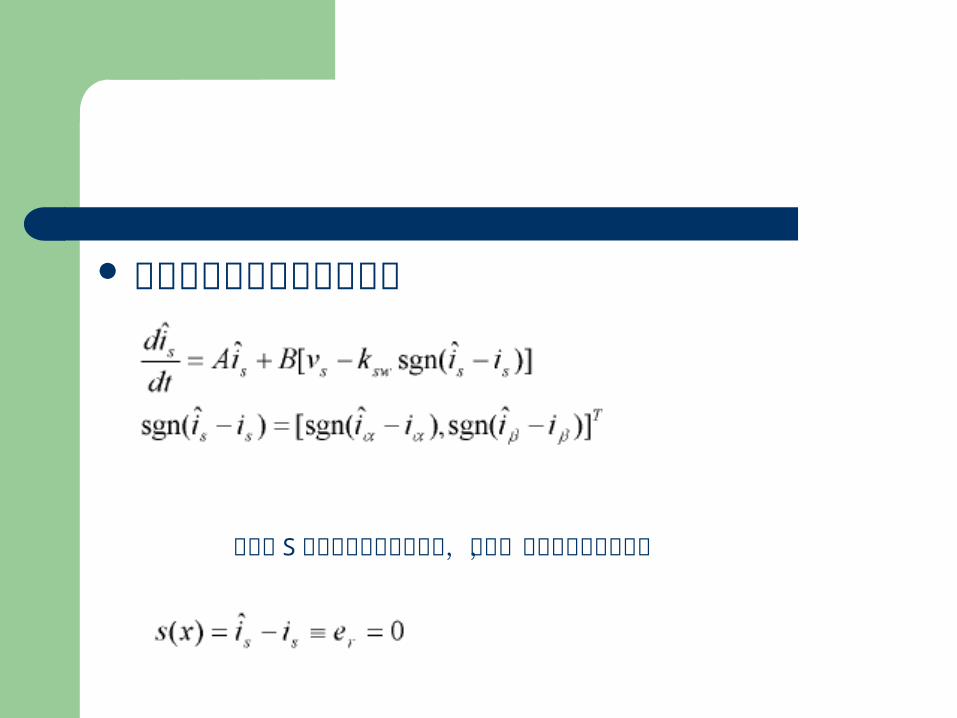
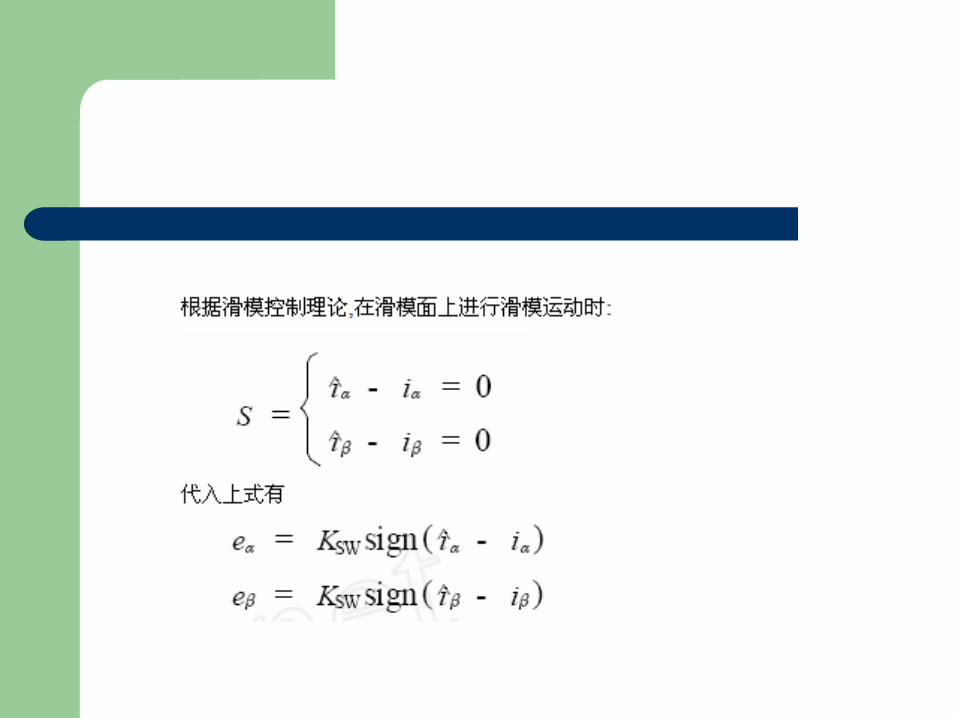
滑模观测器可以由下式表述
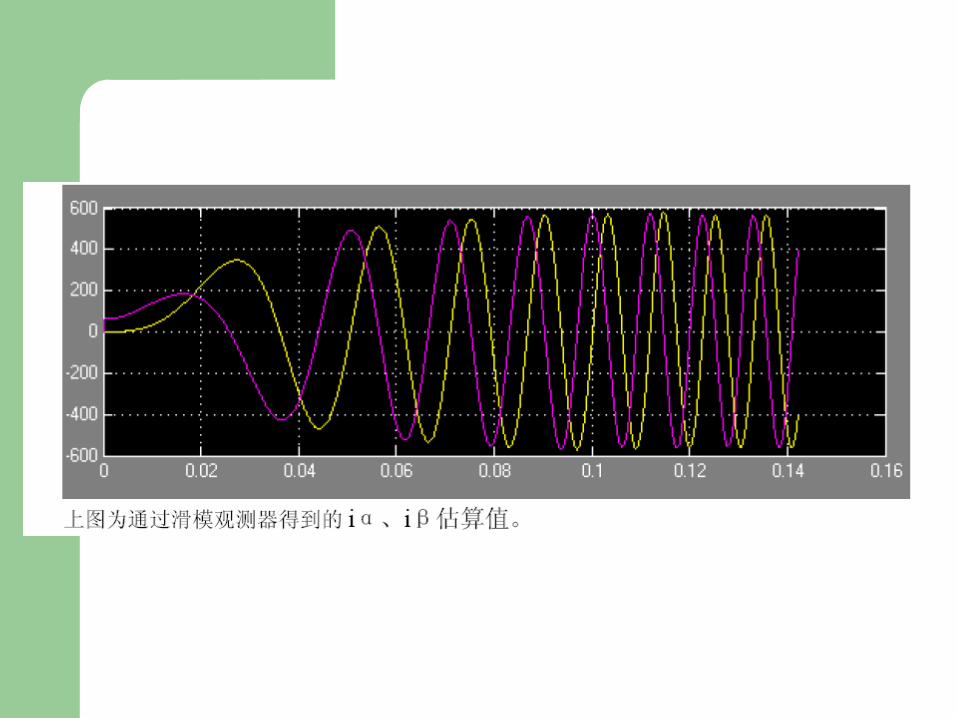
滑模面 S 是由状态变量来实现的,例如,对于定子电流可选取
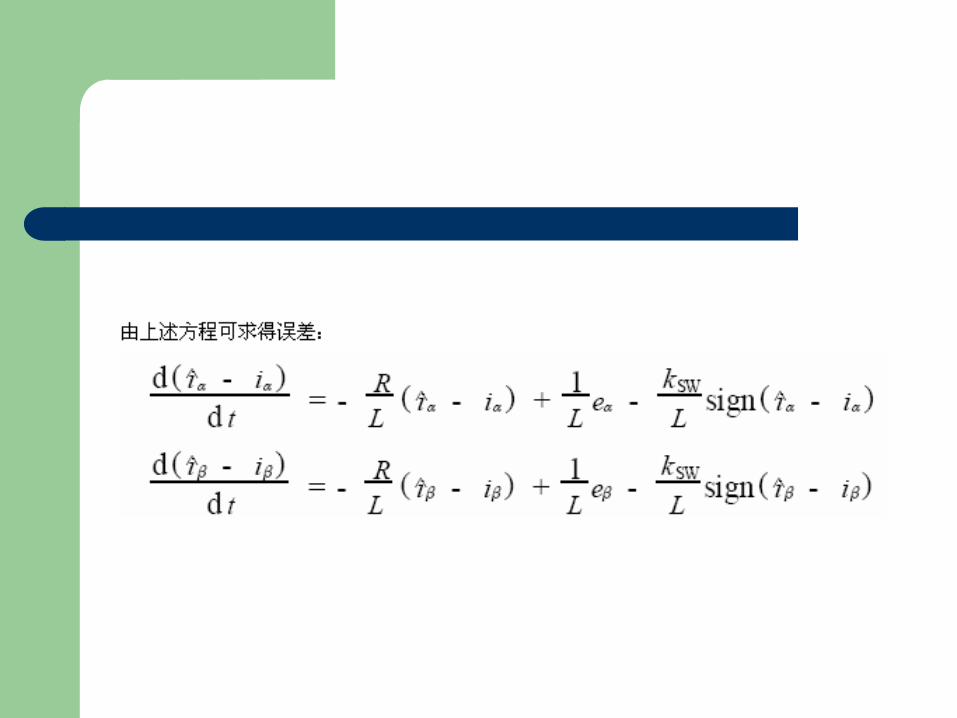
动态误差估算值 :
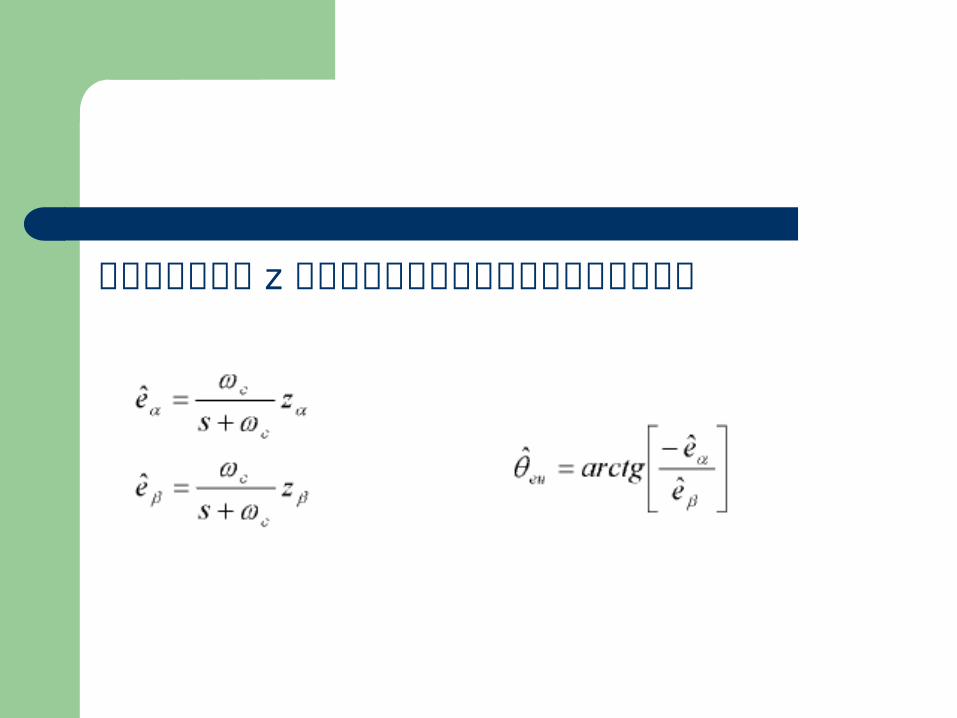
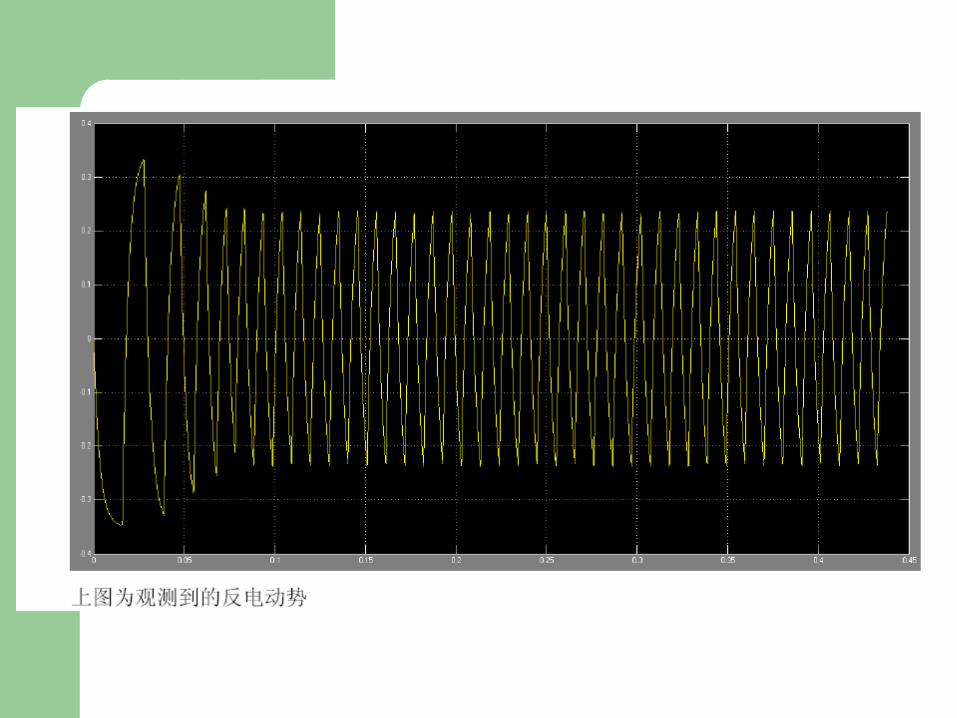
通过对开关信号 z 进行低通滤波可以得到反电势的估算值:
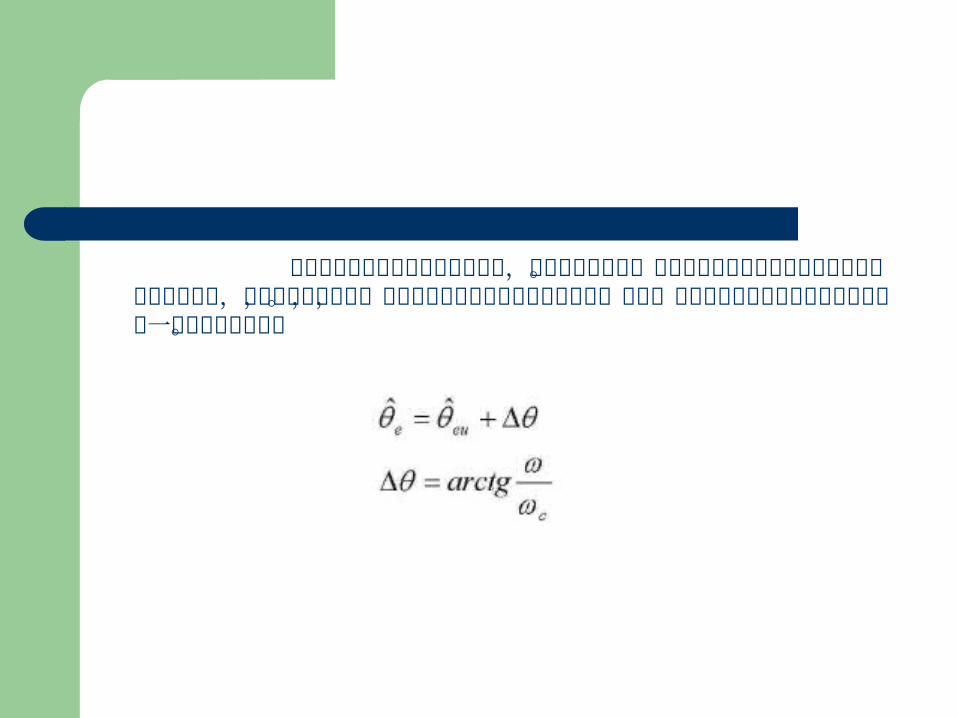
由于采用低通滤波器来获取反电势,引入了相位延迟。相位延迟与低通滤波器的相位响应有着直接的关系,当截止频率越低时,对应的固有频率的相位延迟就越大。因此,需要根据低通滤波器的相位响应,做一个相位延迟补偿。
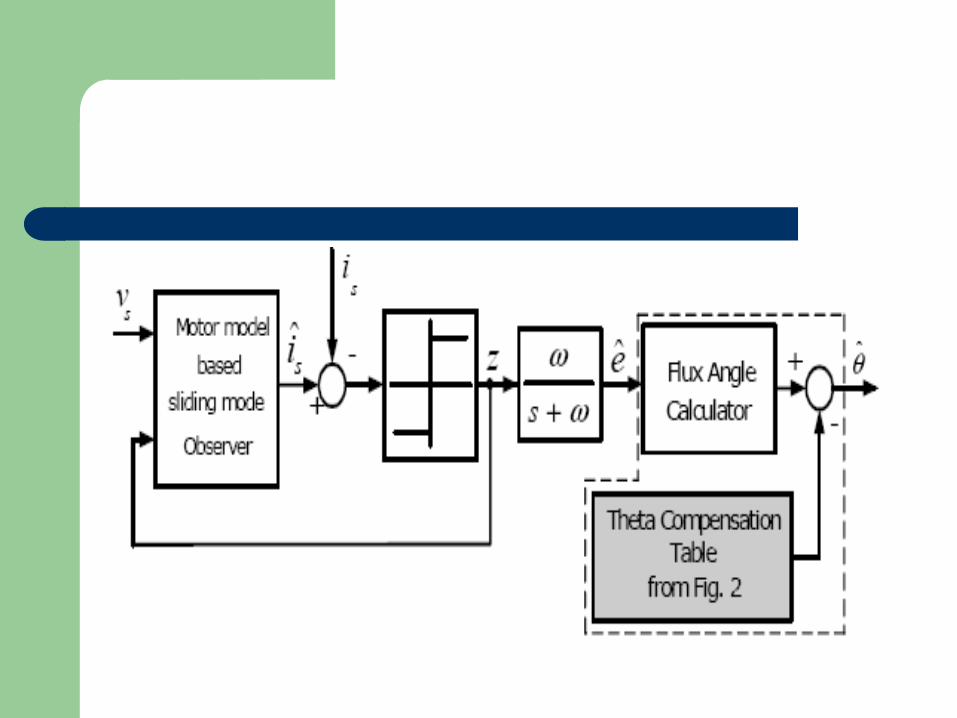
3截止频率可变的数字低通滤波器的设计
低通滤波器用来从开关函数中提取反电势的估算值,通过反电势可以计算出转子的转角和转子转速,但是低通滤波器的引入带来了转子转角估算值的相位滞后。在传统的低通滤波器设计时,由于滤波器的截止频率是一个不随转子转速变化的常值,在进行相移补偿时,需要像之类的存储器来存储大容量的相移值,
为了简化电机驱动系统的硬件结构,同时,为了达到更好的滤波效果,设计一个截止频率可随转子转速变化的低通滤波器来代替传统的滤波器是一种行之有效的方法。
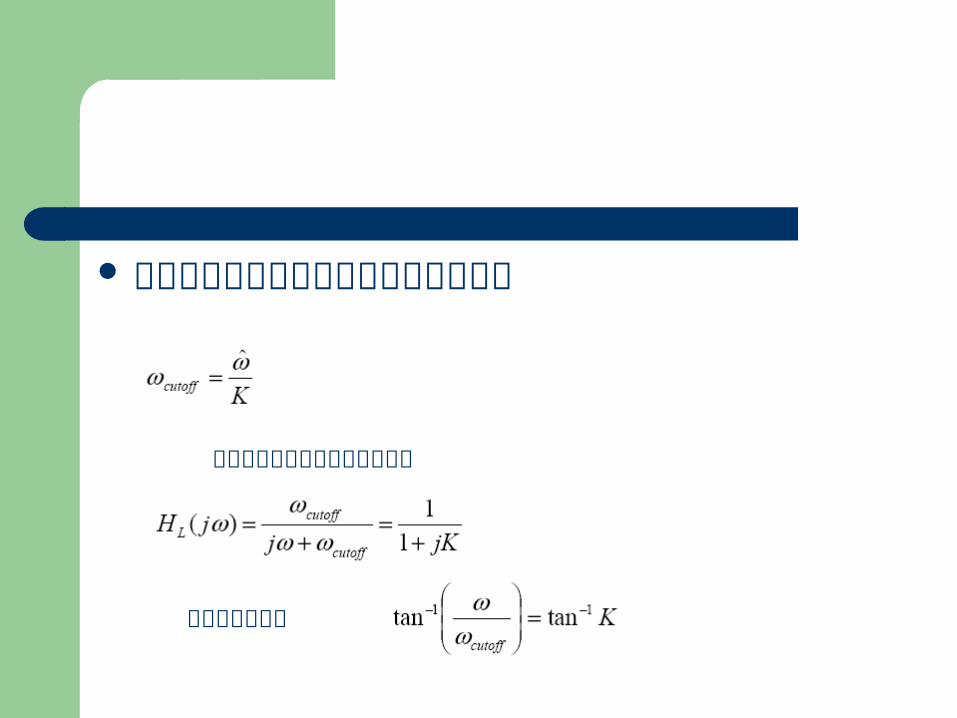
截止频率可变的低通滤波器的截止频率
截止频率可变的低通滤波器满足
转子转角相移角
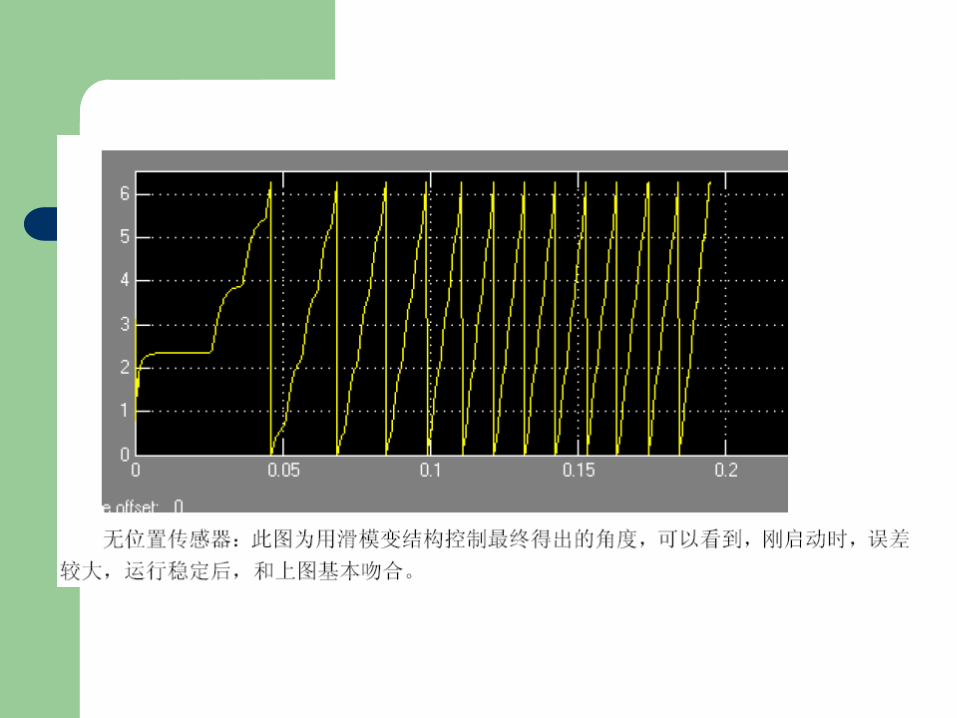
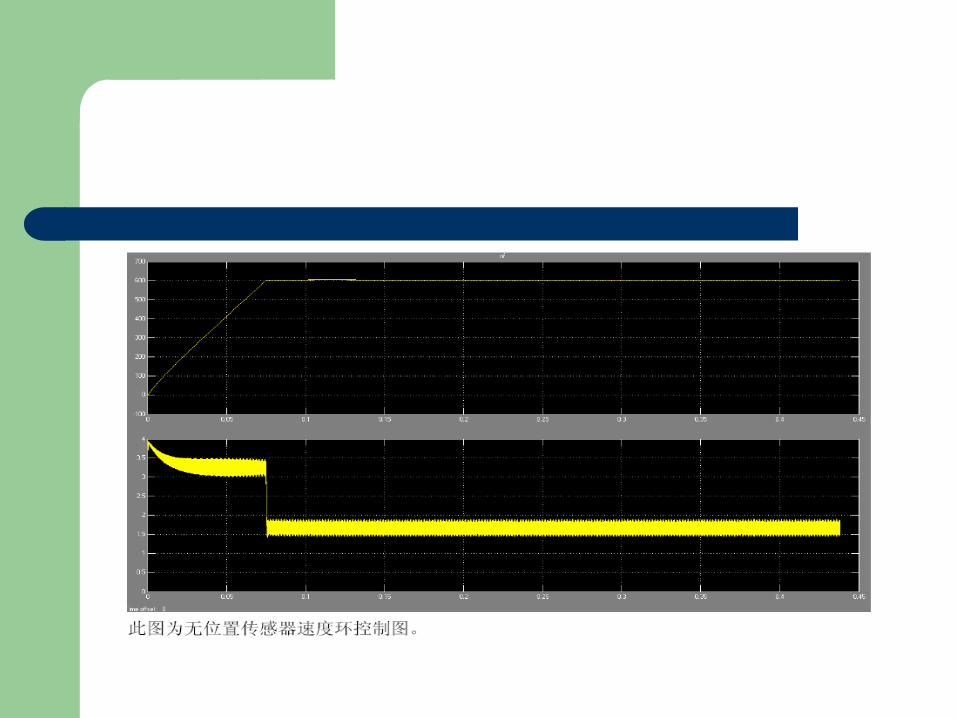
结论:由此可以看出滑模变结构控制器能够在较广频率范围内追踪实际信号 , 实现对转轴位置的观测 , 从而实现了无传感器磁场定向控制。



![Драйвер PMSM серводвигателей Hyperdrive · 2019-06-18 · ПАСПОРТ ИЗДЕЛИЯ Драйвер PMSM серводвигателей Hyperdrive 8 [800]](https://img.pdfslide.tips/doc/110x75/5ed7c7c87626b373466bc408/-pmsm-hyperdrive-2019-06-18-.jpg)

























