Embed Size (px)
Citation preview

설치, 운영, 그리고 보전 Manual v2.10
5335 Avion Park Drive . Cleveland, OH 44143
Customer Service : 877-787-7830 . 440.461.5500 . Fax 440.461.5592 Sales & Technical Service : 586.393.1100 . Fax 586.393.1200
© The Stanley Works, all rights reserved. Cobotics’ Dealer : Customer Order No. : Date : 이 제품은 아래의 미국의 특허, 여러 개의 미국과 국제 특허 출원에 의해 보호된다. : U.S 특허 6, 668, 668 제품을 사용하기 전에 매뉴얼을 읽으세요. 매뉴얼은 중요한 안전, 설치, 운영 및 보전 정보를 담고 있다. 이런 종류의 제품에 대해 설치, 운영 및 보전에 책임이 있는 모든 사람이 매뉴얼을 이용 가능하도록 하세요. P/N 23Z100100

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 3 -
CONTENTS Chapter 1 : iTrolley 매뉴얼 ..…………………………………………..…………….. 7 1.1 서론 …………………………………………………………………………………………………... 7 1.1.1 안전 .………………………………………………………………………………………….... 7 1.1.2 디자인 표준 …………………………………………………………………………………... 7 1.1.3 특성 ….………………………………………………………………………………………… 7
1.1.4 스펙 …………..…………………………………………………….……………..…………… 8 1.1.5 iTrolley 종류 …………………………………………………………………………………… 8 1.1.6 iTrolley 시스템 배치 종류 ……………...………………………………………………….... 9
1.2 설치 ……….………………………………………………………………………………….…..…... 9 1.2.1 구성품 식별 …………………………….………………………………………….….………. 9 1.2.2 설치 …...……………………………….………………………………………………………. 12 1.2.3 케이블 및 공기 공급의 연결 ………...…………………………………………………….. 14 1.2.4 장식 및 케이블 관리 ………………….………………………………………………………15 1.3 운영 …………………………………………….…………………………………………………….. 16 1.3.1 운영 이론 ……………………………….………………………………………………………16 1.3.2 공통 작업 ………………………………….………………………………………………….. 17 Chapter 2 : 사용자 인터페이스 ………………………………………..……………. 19 2.1 서론 …………………………………………………………………………………………….…… 19 2.1.1 디자인 표준 ….…………………………………………………………………………….… 19 2.1.2 스펙 …………………………………………………………………………………………… 19 2.2 설치 ……….……………………………………….………………………………………………... 19 2.2.1 구성품 식별 ………………………………….………………………………………………. 19 2.2.2 설치 ……………………………………………..…………………………………………….. 21 2.2.3 케이블 연결 ……………………………………..…………………………………………… 21 2.2.4 후크 연결 …………………………………………..………………………………………… 21 2.2.5 엔드-이펙트 E-스톱 스위치 설치 ……………...………………………………………….. 23 2.3 운영 ……………………………………………………...………………………………………….. 24 2.3.1 운영 이론 …………………………………………..………………………………………… 24 2.3.2 운전시작 순서 …………………………………….….……………………………………… 24 2.3.3 공통 작업 …………………………………………. ………………………………………… 24 2.3.4 RS-232 인터페이스 ………………………………..….…………………………………….. 25 Chapter 3 : 인텐트 센서 ……..……………………………………..…………..….... 26
3.1 서론 …………………………………………………………..………………………………………26 3.1.1 디자인 표준 …………………………………………..……………………………………… 26 3.1.2 스펙 ……………………………………………………. .……………………………………. 26 3.2 케이블 앵글 센서 ……………………………………………...………………………………….. 26 3.2.1 설치 ………………………………………………………..………………………………….. 26 3.2.2 운영 …………………………………………………………..………………………………. 28 Chapter 4 : 옵션 설비 ….…..……………………………………..……………….... 29
4.1 iNode …………………………………………………………………………………………………29 4.1.1 설치 …………..……………………………………………………………………………… 29
4.1.2 운영 ………………………………………………………………………………………….. 30 4.2 피기 백 엔코더 …………………………………………………………………………………… 30 4.2.1 설치 ………………………………………………………………………………………….. 31 4.2.2 운영 ………………………………………………………………………………………….. 32 Chapter 5 : iTrolley 사용자 인터페이스 소프트웨어 …..……..………………..... 33
5.1 물리적 연결 ………………………….…………………………….……………………………... 33 5.2 운영 ……………………………………….……………………………………………………….. 33
5.2.1 아답티브 게인 ……………….….………………………………………………………... 33 5.2.2 자율 운동 파라미터 …………….……………………………………………………….. 35
5.2.3 로드셀 캘리브레이션 ……...….……………………………………………………….... 37 5.2.4 케이블 앵글 센서 파라미터 ….………………………………………………………… 37
5.2.5 현재 무게 ……………….…..….…………………………………………………………. 37

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 4 -
5.2.6 데이터 로거 파라미터 ………….….……………………………………………………. 37 5.2.7 데드맨 스위치 파라미터 ……….….……………………….…………………….……... 38
5.2.8 디버그 아웃풋 ……………………..………………………….………………………….. 38 5.2.9 에러 상태 ……………………………………………………….…………….…………… 38 5.2.10 비활성화 타임아웃 …………………………………………….…………….…………. 39
5.2.11 iLift 메뉴 ………..………….…………………………………….…………….…………. 39 5.2.12 오버로드 파라미터 …………………………………………….…………….…………. 39 5.2.13 비밀번호 …………………………………………………………..…………….……….. 39 5.2.14 비례 X/Y 버튼 파라미터 ………………………………………..…………….……….. 39 5.2.15 프로파일 파라미터 ……………………………………………...………………………. 39 5.2.16 시스템 배치 ………………………………………………………...……………………. 40 5.2.17 파라미터 저장 ………………………………………………….….....…………………. 40 5.2.18 소프트웨어 버전 ………………………………………………………...………………. 41 5.2.19 터보 파라미터 ……………………………………………………….…..………………. 41 5.2.20 단위 배열 ……………………………………………………………...…………………. 41 5.2.21 가상 한계 배치 …………………………………………….…….…….……………….. 41 Chapter 6 : 보전 ……….…..……………………………………..………………..... 42 6.1 iTrolley 소프트웨어 업그레이드 ….……………………………...…………………………….. 42 6.1.1 설명 …………………………………………………………...…………………………… 42 6.1.2 물리적인 연결 ……………………………………………....……………………………. 42 6.1.3 공정 업그레이드 …………………………………………....……………………………. 42 6.2 iTrolley 보전 ……………………………………………………...………………………………. 42 6.2.1 드라이브 롤러 교체 ……………………………………...……………………………… 43 6.2.2 iTrolley 커버 ………………………………………………...…………………………….. 43 6.2.3 모터 증폭기 교체 ………………………………………..….…………………………… 44 6.2.4 Trolley 모터 교체 …………………………………….…...……………………………… 44 6.2.5 전원 공급기 교체 ……………………………………......……………………………… 45 6.2.6 코일 코드 교체 ………………………………………...………………………………… 45 6.2.7 버튼 LED/렌즈 교체 …………………………………..………………………………… 46 6.3 허브 보전 …………………………...…………………………..……………………………….. 46 6.3.1 와이어 로프 교체 …..…………………………………..……………………………….. 46 6.3.2 후크 교체 ………………………………………………..……………………………….. 46 6.4 와이어 로프 교체 순서 …………...…………………………..……………………………….. 46 6.5 케이블 앵글 센서 보전 …………...…………………………..……………………………….. 48 6.6 시스템 예방 보전 ……..…………...…………………………..……………………………….. 50 6.7 시스템 추천 예비품 …..…………...…………………………..……………………………….. 51 Chapter 7 : 문제 해결 …..……………………………………..………………....... 52 7.1 발생할 수 있는 증상 ……………...…………………………..……………………………….. 52 7.2 시스템 에러 코드표 ….…………...…………………………. .……………………………….. 54 7.2.1 시스템 메세지 …….………………………………….…..……………………………… 54 7.2.2 iTrolley/iTractor 에러 코드 …..…..………………….…..……………………………… 56 7.2.3 iLift 에러 코드 ………………….……………………..…..……………………………… 58 7.2.4 인텐트 센서 에러 코드 ……….…………………….…..……………………………… 58 7.2.5 Cobot 에러 코드 …..……………………………………..……………………………… 59 Chapter 8 : 시스템 개략도 …..………………………………..………………....... 60 Chapter 9 : 부품 도면 …..……………………………………..………………...... 70

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 5 -
그림
Figure 1 – iTrolley 설명 .............................................................................................................. 9 Figure 2 – iTrolley 컴퓨터 플레이트 설명 .................................................................................. 10 Figure 3 – 라인 필터 박스 설명 ................................................................................................ 10 Figure 4 – iTrolley 컨넥터 브라켓 설명 ..................................................................................... 11 Figure 5 – 전통적인 에어 발란스를 가진 3개 iTrolley 시스템 설명 (iTrolley 통신과 전원 케이블은 명료함을 위해 제거되었음. 라인 필터와 소비자에게 공급된 마스터 전원 스위치는 보여지지 않음) .......................................................................................................................................... 12 Figure 6 – iLift를 가진 3개 iTrolley 시스템 설명 ((iTrolley 통신과 전원 케이블은 명료함을 위해 제거되었음. 라인 필터와 소비자에게 공급된 마스터 전원 스위치는 보여지지 않음) .......... 13 Figure 7 – 에어 발란서 브라켓에 에어 발란서 설치 설명 ……………..................................... 13 Figure 8 – 3개 iTrolley 시스템에서의 전기 및 통신 케이블 연결 설명 (소비자에게 공급된 마스터 전원 스위치는 보여지지 않음) .................................................................................................. 14 Figure 9 – 에어 발란서를 가진 3개 iTrolley 시스템을 위한 공압 연결 설명 …………........... 15 Figure 10 – iLift를 가진 3개 iTrolley 시스템을 위한 공압 연결 설명 (케이블 앵글 센서와 정션 박스는 명료함을 위해 제거되었음) .......................................................................................... 15 Figure 11 – X-Y 한계 설정 ......................................................................................................... 18 Figure 12 – 버튼 모듈과 후크 인터페이스를 가진 허브의 정면도 설명 ………...................... 19 Figure 13 – 버튼 모듈을 가진 허브의 배면도 설명 …………................................................... 20 Figure 14 – 허브에 후크를 설치하는 방법 설명 …................................................................... 22 Figure 15 – 허브안에 후크와 허브 후크 인터페이스 조립 방법 설명 ………….….…............. 22 Figure 16 – 인라인 핸들을 가진 후크 설치 방법 설명 ............................................................. 23 Figure 17 – 허브에 엔드-이펙트 E-스톱 스위치(Part # 9904-2001) 연결 설명 …..................... 23 Figure 18 – E-스톱 스위치가 설치된 허브(Part # 9904-2202) ..................................................... 24 Figure 19 – 정션박스를 가진 케이블 앵글 센서 설명 …............................................................ 26 Figure 20 – 케이블 앵글 센서가 설치된 iLift 설명 .................................................................... 27 Figure 21 – 전통적인 에어 발란서와 케이블 앵글 센서를 가진 에어 발란서 브라켓 설명 ... 27 Figure 22 – 일반적인 브라켓 부쉬와 구성품 …......................................................................... 28 Figure 23 – CAS 엔드 브라켓에서 풀리에 일반적인 브라켓 부쉬 그라운드 접촉 .................. 28 Figure 24 – iNode 박스 설명 ...................................................................................................... 29 Figure 25 – iNode 설치 치수 …………........................................................................................ 30 Figure 26 – 피기 백 엔코더 설명 (Part #. 2801-0001) .............................................................. 31 Figure 27 – 피기 백 엔코더 설치 설명 …………………………….............................................. 31 Figure 28 – iTrolley 드라이브 메커니즘과 컴퓨터 플레이트 조립 설명 (trolley 몸체는 유틸리티 컨넥터를 보여사이클 위해 삭제되었음) .................................................................................... 32 Figure 29 – 아답티브 게인 CAS 민감도 설정 ........................................................................... 34 Figure 30 – 아답티브 게인 CAS 움직이지 않는 밴드 설정 ..................................................... 35 Figure 31 – 드라이브 롤러/기어 박스 설명 …………................................................................. 43
Figure 32 – 컴퓨터 플레이트 커버를 제거하는 방법 설명 ....................................................... 43
Figure 33 – 모터 증폭기 제거 방법 설명 ................................................................................. 44 Figure 34 – 전원 공급기 제거 방법 설명 ................................................................................. 45 Figure 35 – CAS 웨어 인서트(part # 2101-3006)를 교체하는 방법 설명 ................................ 49 Figure 36 – 전자 부품에 컨넥터 설명 .................. ................................................................... 60 Figure 37 – 점퍼 설정 ................................................................................................................ 61 Figure 38 – PC/104 회로 카드 스택 .......................................................................................... 62 Figure 39 – 전원 연결 ................................................................................................................ 63 Figure 40 – 전자 부품의 상호 연결 .......................................................................................... 64 Figure 41 – 전자 부품의 상호 연결 .......................................................................................... 65 Figure 42 – 전자 부품의 상호 연결 .......................................................................................... 66 Figure 43 – 유틸리티 컨넥터 연결 ............................................................................................ 67 Figure 44 – iTrolley/iTractor 증폭기 설정 .................................................................................. 68 Figure 45 – iTrolley 기존 E-Stop 회로 ...................................................................................... 69

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 6 -
테이블 Table 1 – 허브 터미널 블록 핀 아웃 ........................................................................................ 21 Table 2 – iTrolley 예방 보전 검사 일정 ………………............................................................... 50 Table 3 – 추천된 예비 부품 리스트 .......................................................................................... 51 Table 4 – 문제 해결 테이블 ....................................................................................................... 52

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 7 -
Chapter 1: iTrolley 매뉴얼1.1 서론 iTrolley는 브리지나 매달린 짐을 정확하게 위치시키기 위해 페회로 피드백 시스템을 사용한다. 제어 알고리즘은 시스템내의 다른 iTrolley와 입력/피드백 센서와의 지속적인 통신을 하는 온-보드 컴퓨터에서 운영된다. iTrolley는 사용자의 목적, 적용 속도 및 위치 룰과 같은 입력자료를 가지고 그것에 알맞게 짐을 움직인다. 1.1.1 안전 전체적으로 이 매뉴얼은 메모, 주의와 경고 기호가 있다. 그것은 아래와 같은 뜻을 지닌다.
메모는 일반적인 특성을 나타내고 정보를 강조하기 위한 것이다.
주의는 장비에 손상을 주거나 장비의 불안전한 결과를 초래할 수 있는 개인적인 행동에 대해 경고를 하는 것이다.
경고는 사람들에게 상해나 죽음을 초래할지도 모르는 잠재적인 위험한 행동을
일깨워 사이클 위한 것이다.
이 장비는 꼭 자격을 갖춘 서비스맨에의해 설치되고 서비스되어야한다. 이 매뉴얼의 모든 정보는 그런 사람들을 위해 관리된다. 사용자 매뉴얼에 설명된 장비 설치에 책임이 있는 사람은 아래사항을 꼭 확인해야 한다.
1) 꼭 기술적인 자격을 갖춘 사람이 설치해야만 한다. 2) 이런 자격을 갖춘 사람은 설치 작업시 이용가능한 첨부 문서를 가지고 있어야 한다. 3) 작업이 수행시 설치는 기술적인 자격이 없는 사람은 피해야한다.
1.1.2 디자인 표준 iTrolley는 적용될 수 있는 곳에서 아래의 표준을 따른다.
BSR/T15.1 Standard for Intelligent Assist Device (IAD) – Personnel Safety Requirements American National Standards Institute
ANSI B30.11 Monorail Systems & Underhung Cranes ANSI B30.17 Overhead and Gantry Cranes
Crane Manufacturers Association of America CMAA Specification 70
National Electric Code NEC Article 610 Cranes and Hoists
Occupational Safety & Health Administration OSHA CRF 1910.179
Monorail Manufacturers Association MG 27.2 Specification for Underhung Cranes and Monorail Systems
1.1.3 특성 동봉된 특허 트랙 레일 시스템을 위한 Stanley Cobotics 새로운 iTrolley에, 다루기 힘든 큰 브리지 크레인을 가진 움직이는 짐은 이전보다 지금 더 빠른 속도 및 정밀도를 가질 수 있다. 이 시스템은 대부분의 사용자가 장비 사용을 하지 않거나 수동으로 작업을 수행하게 만드는 시작과 멈출 때의 힘을 크게 줄이고 오버헤드 크레인의 운동량과 관성을 억제한다. 서보 유도 iTrolley는 동봉된 특허 트랙 레일 시스템이 만들어내 고성능 드라이브 시스템이다. 시스템은 마치 운영자가 확장되어진 것처럼 반응하기 위해 사람의 의도를 측정하고 iTrolley 시스템을 자유자재로 조정할 수 있는 케이블 앵글 센서와 같은 인텐트 센서의 집합을 이용한다. 모든 전통적인 레일 프로파일(신규나 이미 설치된 것 모두), 중앙 허브로 부터의 빠른 프로그램 능력, 반자동등의 쉬운 설치를 제공하기 위해 iTrolley는 오버헤드 레일 시스템에서 여러분이 가장 높은 수행도와 생산성을 가질 수 있도록 돕는다.
RS232 인터페이스를 가진 프로그램 가능한 허브 높은 속도의 통신 연결과 주요한 사용자 인터페이스처럼 허브는 여러분이 아래의 사항을 할 수 있도록 허용한다.:

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 8 -
• 쉽게 설치하고 배열하며 랩탑 컴퓨터를 가지고 쉽게 프로그램한다. • 사용자가 선호하는 속도, 가속도 및 민감도 사이에서 연결하도록 프로그램한다.
비접촉 케이블 앵글 센서 유일한 특허(U.S. 6,668,668) 센서는 의도된 방향에서 운영자의 움직임을 감지하고 즉각적인 동력 보조를 제공한다. 여러 개의 푸쉬 버튼의 필요성을 없애기 위해 운영자는 로드를 간단히 잡고 움직이고자 하는 방향으로 민다. 비접촉 케이블 앵글 센서는 케이블의 기울어진 비례수를 측정하고 지능적인 시스템은 운영자가 움직이는 만큼 가능한 빠르게 반응한다.
가상 한계 허브로부터 쉽게 프로그램 할 수 있고 가상 한계는 로드 손상을 막고 브리지와 주행레일을 따라 Trolley의 움직임을 제한함으로 인해 생산성을 높인다.
윈위치로의 독립된 복귀 iTrolley는 시스템에 프로그램 가능한 입력자료를 기초로 사용자가 정의한 8가지의 위치중의 하나로 자동으로 이동한다.
터보 모드 무거운 로드의 이동을 돕기위해 터보 모드는 운영자의 어떤 노력도 요구하지 않고 iTrolley 시스템이 움직이도록 한다.
아답티브 게인 iTrolley는 가벼운 로드의 경우엔 소음이 증가하는 것을 막고 무거운 로드의 경우 민감도를 높이는 것과 같이 매달린 로드에 근거하여 시스템의 민감도와 성능을 자동으로 조절한다.
불안전성 감지 iTrolley는 과감한 증가 설정과의 상호작용을 하는 로드 동력학에 의해 불안전성을 감지하는 특허 출원 알고리즘이 특징이다. iTrolley는 이런 불안정을 감지하고 자동으로 그것을 무기력화하게 만들것이다. 쉬운 기능 iTrolley는 서비스나 매뉴얼 백업을 쉽게할 수 있다. 독립적인 장치 각 iTrolley는 단지 120VAC의 동력을 요구하는 온-보드 제어를 가진 완전히 독립적인 장치다.
1.1.4 스펙
온도 범위 : 0 °C에서 +60 °C, 운영 (-10 °C에서 +85 °C 비운영) 습도 : 10에서 90% 비응축, 운영 (5에서 95% 비응축, 비운영) AC 공급 전압 : 90에서 125 VAC @ 50에서 60 Hz 유도 전류 : 7A max 가속도에서의 무게: 300 lbs (136 kg) max @ 12.9 ft/s2 (4 m/s2) iTrolley 최대 무게 능력 : 1000 lbs (453.6 kg) 속도 : 6.6 ft/s (2 m/s) 주행레일 이동 : 제한없음 브리지 길이 : 30ft (9.14m) max
1.1.5 iTrolleys 종류
표준 iTrolley 표준 iTrolley 아래의 레일 시스템을 가지고 구성될 수 있다.:
CES Stack Track Demag KBK2/2L, KBK ALULINE 180 Knight Industries: RAD4500A, RAD4800A, RSD5500A, RSD5700A, RAD7500 Unified Industries ETA-8 Zimmerman-IR ZRS2-3, ZRA2 (new)
I-Beam iTrolley

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 9 -
I-Beam iTrolley 여러가지 표준 I-beam과 특허의 트랙 시스템에서 작동할 수 있다. Tractor iTrolley Tractor iTrolley 현재 시스템에서 동력없는 Trolley를 밀고 당길 수 있다.
1.1.6 iTrolleys 시스템 구조의 종류
iTrolley 시스템은 적용 필요 요건에 따라 하나나 더 많은 Trolley를 포함할 수 있다. 추가로, 각 Trolley는 앞쪽 또는 뒤쪽으로 향하도록 하는 두가지 방법중 한가지로 배치될 수 있다. 더욱이, 케이블 앵글 센서는 브리지에 수평 또는 수직으로 배치될 수 있다. 만약 현재 주행 Trolley가 하나 이상이면 주행 마그넷은 2개의 레일중 하나 위에 설치될 수 있다. 시스템은 Stanley Cobotics 사람이나 대표에 의해 사용자 인터페이스 소프트웨어를 통하여 배열될 수 있다. 더 자세한 사항은 Section 5.2.16을 참조한다. 1.2 설치 다음은 전형적인 세가지의 iTrolley 시스템의 아웃라인이다. 1.2.1 구성품 식별
Figure 1- iTrolley 설명
드라이브 롤러 연동중일 떄 드라이브 롤러는 Trolley가 레일을 따라 움직이도록 한다. 레일 위에 설치된 마그넷과 Trolley 몸체위의 Hall effect 센서는 발생할 수 있는 어떤 미끄러짐을 방지하기 위해 각 경로위에 절대위치를 업데이트한다. 드라이브 롤러 연동 메커니즘
매뉴얼 연동 시스템에서 스프링과 록 너트는 레일에 드라이브 롤러를 매달아 둔다. 공압시스템에서 에어 실린더에서 공기압은 레일 반대쪽으로 드라이브 롤러를 누른다. 록 너트의 토오크나 공기압이 제거되면 드라이브 롤러는 레일에서 자유롭게 움직이고 시스템이 매뉴얼로 움직일 수 있도록 한다. 아래의 그림 7을 보고 조정한다.
주의 : 공기압이 제거되었을 때 iTrolley가 움직이고 있었다면 관성에 의해 계속 움직
일 것이다.
서보 모터
서보 모터는 연속적인 토오크 18 in-lbs(2.03Nm)와 연속적인 4,000rpm에 비례한다. iTrolley의 밖에서 기어박스를 통해 드라이브 롤러와 연결된다.

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 10 -
Figure 2 – iTrolley 컴퓨터 플레이트 설명
전원 공급 전원 공급은 컴퓨터 스택과 지시등에 전원을 공급한다. 모터 증폭기나 모터에는 전원을 공급하지 않는다. 컴퓨터 스택 3개의 구성품은 스택을 구성하는 PC/104 버스와 연결된다. 컴퓨터는 RS-232 인터페이스를 통해 사용자가 프로그램 설정을 하게 할 뿐 아니라 온 보드 구성품, 센서와 통신한다. 모터 증폭기 증폭기는 제어 소프트웨어에서 드라이브 모터로 명령을 전달한다. 라인 필터 박스
Figure 3 – 라인 필터 박스 설명
라인 필터는 AC 라인에서 발생된 어떤 전자장 인터페이스도 제거한다. 라인 필터 박스 입력은 마스터 파워 스위치와 연결되어 있고 라인 필터 출력은 iTrolley 컨넥터의 전원에 연결된다. (자세한 사항은 그림 8을 참조한다.)
주의 : 마스터 전원 스위치를 눌렀을 때 시스템이 운영중이면 iTrolley는 관성에 의해 계속 움직여 레일의 엔드 스톱 하드웨어와 부딪힐지도 모른다.
iTrolley 컨넥터 브라켓

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 11 -
Figure 4 – iTrolley 컨넥터 브라켓 설명
통신 저장소(BRK-J1) iTrolley 컴퓨터는 피드백과 통신 라인을 통한 명령 신호를 공유한다.
휴즈 홀더(BRK-F1) 휴즈 홀더는 모터 증폭기를 위한 16Amp(5 x 20mm) 슬로우 블로우 휴즈를 가진다.
전원 인(BRK-J2) 다중의 iTrolley 시스템에서 전원은 한 개의 iTrolley에서 다음 것까지 데이지 연결이다. iTrolley는 스위치를 분리하는 라인 필터와 전원 또는 체인에서 iTrolley 위치에 의존하는 다른 iTrolley로부터 AC 전원을 받는다.
전원 아웃(BRK-J3) AC 전원은 iTrolley를 통해 다른 iTrolley, iLift나 다른 수직의 리프트 장치에 전달된다.
허브와 케이블 앵글 센서 컨넥터(BRK-J4) 사용자 명령, 케이블 앵글 센서 신호와 RS-232 시리얼 데이터는 이 연결을 통하여 전달된다.
실패 지시기(BRK-DS2) 빨간 등은 시스템에 실패가 존재하거나 시스템이 멈추면 점등된다. 이것은 허브 위의 빨간 상태 지시등과 동일하다.
전원 온 지시기(BRK-DS1) 녹색 등은 AC 전원이 iTrolley에 공급될 때 점등된다.
클리어 한계 버튼(BRK-S3) 주황색 등은 이동 한계가 설정되지 않았을 때 점등된다. 이 버튼은 초기에나 새로운 이동 한계를 설정할 때 사용된다. 한계가 설정되면 등은 꺼질 것이고 플래쉬 하드 디스크에 한계가 남아있는 한 다음의 시스템에 전원이 공급된 후엔 꺼진 상태를 유지할 것이다.
한계 설정 푸쉬 버튼(BRK-S1, BRK-S2) 이 녹색등은 한계가 활성화 되었을 때 점등된다. 한계는 iTrolley가 레일 마그넷을 지나갈 때까지 다음의 시스템 시작을 활성화하지 않는다. 2개의 주행 iTrolley를 가진 시스템에서 레일 마그넷을 가진 시스템만이 한계 정보를 표시할 것이다. 각 버튼은 가장 가까운 방향에서의 한계와 일치한다.
1.2.2 마운팅

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 12 -
Figure 5 – 전통적인 에어 발란스를 가진 3개 iTrolley 시스템 설명 (iTrolley 통신과 전원 케이블은 명료함을 위해 제거되었음. 라인 필터와 소비자에게 공급된 마스터 전원 스위치는 보여지지 않음)
다음은 3개 iTrolley를 가진 전형적인 시스템 설치를 위한 일반적인 가이드 라인이다. 개인적인 설치는 이 가이드 라인에서 필연적으로 벗어날 수 밖에 없는 유일한 제한을 포함할 수 있다. 어떤 변경에도 Stanley Cobotics에 자문을 구한다. 다음의 설명에서 iTrolley는 숫자에 의해 언급된다. iLift나 허브에 직접 부착된 마스터 iTrolley는 #1 iTrolley라 부른다. 다른 iTrolley는 순서대로 2번, 3번으로 번호를 부여한다. 시스템은 움직이는 부하나 다른 요소에 의해 iTrolley의 숫자는 다양하다. 마스터는 항상 #1이다. 동일한 이동 범위를 가지기 위해 동일한 방향에서 마주보는 레일에 2개의 주행레일 iTrolley를 설치한다. iTrolley #3은 전원/긴급 멈춤 상자에 가장 가까운 레일에 설치되어야 한다. 회색 기어박스는 전원과 통신 케이블을 다른 iTrolley에 연결하기 위해 주행레일의 바깥쪽에 위치해야만 한다. iTrolley #2는 주행레일 안쪽의 회색 기어박스를 가진 iTrolley #3과 동일한 방향을 마주 보도록 설치해야 한다.
주의 : 2개의 주행 iTrolley를 가진 시스템에서 시스템의 주어진 입력을 위해 동일한 방향에서 양쪽으로 움직이도록 시스템을 설정하려면 2개의 iTrolley를 반대방향으로 마주보도록 설치할 수 있다. Section 5.216시스템 배열을 참조한다. 주행 iTrolley를 다
른 방향을 마주보도록 설치하는 것은 모터가 반대방향에서 그것을 움직이게 하는 요
인일 것이다. iTrolley나 레일에 손상을 가할 수 있다. iTrolley #3번과 #2번이 레일에서 벗어나는 것을 방지하기 위해 주행레일에 End Stop 하드웨어를 설치한다. iTrolley가 매번 이상적이고 자주 지나갈 것 같은 위치안에서 iTrolley #2 주행레일에 마그넷을 설치한다. 이것은 레일의 중간에 가깝거나 가깝지 않을 수 있다. 마그넷이 iTrolley 컴퓨터 플레이트를 마주보고 있는지를 확인한다. iTrolley #3과 #2 위에 각각 2개씩 4개의 End Stop 브라켓을 처음에 설치하여 브리지를 설치한다. End Stop 브라켓에 브리지 레일을 설치한다. 브리지 iTrolley가 매번 이상적이고 자주 지나갈 것 같은 위치안에서 마그넷을 설치한다. 마그넷이 iTrolley 컴퓨터 플레이트를 마주보고 있는지를 확인한다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 13 -
Figure 6 – iLift를 가진 3개 iTrolley 시스템 설명 ((iTrolley 통신과 전원 케이블은 명료함을 위해 제거되었음. 라인 필터와 소비자에게 공급된 마스터 전원 스위치는 보여지지 않음)
iTrolley #1은 전원과 통신 케이블 연결을 다시 이용하기 위해 iTrolley #2과 마주보는 케이블 컨넥터를 가지고 브리지 레일에 설치되어야 한다. 브리지 레일 위레 End Stop 하드웨어를 설치한다.
Figure 7 – 에어 발란서 브라켓에 에어 발란서 설치 설명
다음 단계는 시스템이 공압 드라이브 롤러 시스템을 사용하지 않으면 적용하지 않는다. 스프링 길이가 1-1/8”와 1-1/4”(즉, 약 3/4”에서 7/8” 압축됨)사이로 압축될 때까지 각각의 스프링 위에 록너트를 조여준다. 이상적으로 스프링의 미는 힘은 90파운드이어야 한다. 만약 iTrolley가 공기 메커니즘을 사용하면 라인에서의 압력은 70 ~ 80psi이어야 한다.

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 14 -
주의 : 잘못된 방향에서 브리지 iTrolley를 설치하는 것은 전체적으로 이동할 수 있는 충분한 케이블을 남겨두지 않을 수 있고 iTrolley 사이에 케이블을 위한 Pinch point를 만들 수 있다.
주의 : 드라이브 롤러 실린더에서 80psi를 초과하는 공기압은 드라이브 롤러의 과도
한 마모를 초래한다. 60psi이하의 공기압은 드라이브 롤러의 미끄러짐을 초래할 수 있고 과도한 마모를 초래한다.
1.2.3 케이블과 공기 공급 연결 전원과 통신 케이블은 잘못된 설치를 방지하기 위해 크기에 따라 분류되어진다. 시작하기 전에 전원선의 전압이 끊겨있고 긴급정지 스위치가 눌려있는지를 확인한다. 공기압은 꺼져 있어야 한다.
경고 : 전원 해제와 공기압을 제거하지 않으면 상해나 죽음을 초래할 수 있다.
Figure 8 – 3개 iTrolley 시스템에서의 전기 및 통신 케이블 연결 설명 (소비자에게 공급된 마스터 전원 스위치는 보여지지 않음)
처음에 전원선을 설치하고 전원이 끊긴 스위치에서 나온 케이블을 가지고 시작한다. 주행레일의 길이 방향으로 iTrolley #3이 자유롭게 이동하도록 하는 마지막 고리나 와이어 가이드이후에 충분히 느슨하게 하고 케이블을 iTrolley #3에 연결한다. iTrolley #2에 iTrolley #3을 연결하기 위한 iTrolley 전원 케이블에 하나의 브리지 iTrolley를 사용한다. iTrolley #1에 iTrolley #2를 연결하기 위한 iTrolley 전원 케이블에 다른 iTrolley를 이용한다. iLift가 설치되면 하나의 짧은 전원 케이블이 남을 것이다. iTrolley #1에서 나온 통신 케이블을 iTrolley #2에 연결하고 iTrolley #3에 iTrolley #2를 연결한다. 이 시스템에서 마지막 iTrolley에서 통신 터미널에 설치되어야 하는 말단저항을 가진 작은 플러그가 있다. 이 선들은 iTrolley 사이에 부드러운 배선을 만들기 위해 와이어 타이나 부드러운 와이어 랩을 사용하여 전원 케이블을 따라 감싸져야 한다. 모든 컨넥터는 적절히 안착되고 적절한 위치에 나사로 죄어져야 한다. 모든 케이블이 다른 장비와의 간섭을 피하기 위해 가이드 되었음을

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 15 -
확인한다.
Figure 9 – 에어 발란서를 가진 3개 iTrolley 시스템을 위한 공압 연결 설명
iTrolley #1에서 나온 공기 공급을 iTrolley #2에 연결하고 iTrolley #3에 iTrolley #2를 연결한다. 이 선들은 iTrolley 사이에 부드러운 배선을 만들기 위해 와이어 타이나 부드러운 와이어 랩을 사용하여 전원 케이블을 따라 감싸져야 한다.
Figure 10 – iLift를 가진 3개 iTrolley 시스템을 위한 공압 연결 설명 (케이블 앵글 센서와 정션 박스는 명료함을 위해 제거되었음)
1.2.4 줄 장식과 케이블 관리 모든 시스템이 독자적이고 자체의 요건이 있으므로 시스템 인터그레이터(SI)는 전반적인

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 16 -
시스템 디자인과 케이블 비품관리에 대한 책임이 있다. Stanley Assembly Technologies(SAT)는 SI 별로 케이블링을 위해 정의된 치수와 전기 스펙을 제공할 것이다. SAT는 케이블 관리에 관해서 다음의 권고와 제안을 한다. 1) Tag-Line 스타일의 줄 장식을 사용하면 Tag-Line의 처짐을 방지하기 위한 무거운
게이지 전원 케이블의 무게를 조절할 수 있게 한다.(표준 Zimmerman 브라켓은 처진다.) 바깥쪽 줄 장식이나 처짐을 방지하기 위한 케이블 캐리어 스타일 트랙 줄 장식을 위한 Trolley가 있는 “Unistrut” 스타일 트랙을 사용한다.(예를 들면 www.gortrac.com)
2) 컨넥터가 케이블을 지속적으로 잡아당겨 잠재적인 손상을 주는 것을 피하기 위해 각각의 연결 포인트에 모든 케이블링의 느슨함을 잡아당기는지 확인한다. 컨넥터는 반복되는 변형이나 당김이 가해지지 않도록 디자인 되어야 하고 케이블 자체의 자켓에 느슨함을 잡아 당겨야 한다.
3) 전원을 제공하기 위한 주행레일 위에 버스 바 사용의 잠재성을 재검토한다. 통신과 공기는 아직 줄 장식되어질 필요가 있다.
4) 레일에서 줄 장식 Trolley를 사용하면 리프팅 장치의 고리에서 고리로의 이동을 유지하기 위해 Trolley가 상승할 수 있는 충분한 공간을 남겨둔다.
5) 시스템이 공압이나 전기를 필요로 할 때 주행이나 브리지의 반대쪽에서 분리된 입력(독립된 Tagline이나 Unistrut) 사용을 고려한다.
6) 여러 경우에 전원, 통신과 공기는 하나의 Tagline에 함께 묶여질 수 있다.(처짐이 없게) 7) 손상을 피하기 위해 허브에 연결된 코일 호스 어셈블리는 한 방향으로 연속적으로
회전되지 말아야 한다. 공정은 와이어 로프가 지속적으로 회전하는 것에 대치하도록 운영자가 원위치로 되돌아 오는 곳에 설정되어야 한다.
8) 허브에 연결된 엔드 이펙트 위의 모든 케이블은 느슨함이 잡아당겨져야 한다. 9) 홈에 원위치하는 것과 같은 SAT에서 제공된 특별한 소프트웨어는 그 특성을
활성화하기 위해 스위치나 다른 센서의 입력을 요구할 것이다. SI는 Cobotics 허브에 요구되는 스위치와 와이어를 제공할 책임이 있다.
10) SI는 케이블의 라우팅, 케이블 클램프나 트레이와 마모나 충격을 피하기 위한 방법으로 줄 장식 방법을 위한 책임을 유지한다.
11) SI는 줄 장식을 위해 요구되는 재료를 공급할 책임이 있다. 12) SI는 줄 장식에서 iTrolley까지 변이와 느슨함을 잡아 당기게 하는 책임이 있다. 13) SAT는 요청에 근거한 케이블링을 위한 제조 스펙을 제공할 것이다. 14) SAT가 제공한 케이블링을 위해 SI는 전원, 통신과 공기를 포함한 정확한 케이블 길이를 SAT가
제공하도록할 책임이 있다. 케이블 길이를 결정하는데 고려해야 할 사항은 전원 공급을 위한 거리, 주행과 브리지 길이와 줄 장시 방법 및 케이블 느슨함의 당김등을 포함해야 한다.
15) SI는 엔드 이펙트나 발란스 공기 공급 라인에서 분리된 iTrolley 공기를 제어하기 위한 밸브나 스위치를 포함한 iTrolley 드라이브 롤러와 관련이 있는 1/4” 지름의 공기 공급 라인을 위해 요구되는 하드웨어를 제공할 책임이 있다.
16) SI는 60psi의 최소치로 제안된 iTrolley 공압을 조절하기 위한 레귤레이터를 제공한다. 17) SI는 iTrolley 드라이브 롤러와 관련이 있는 에어 셧어프와 에어 덤프 밸브를 제공해야 한다. 18) SI는 둥글거나 평평한 전원 케이블의 스타일을 지정할 책임이 있다. 19) SI는 오버헤드 시스템(iLift나 iTrolley)에 허브를 연결하는데 사용되는 코일 케이블의 길이를
결정하기 위한 정확한 높이를 제공할 책임이 있다. 높이는 최대와 최소 이동 지점 및 브리지 높이를 포함해야 한다.
1.3 운영 이 섹션은 iTrolley의 운영을 상세히 설명한다. iTrolley와 운영자 상호작용은 더 큰 시스템의 일부로 설치되었을 때 최소가 된다. 기능은 운영자에게 주로 알기 쉬운 것이다. 다음의 정보는 본질적으로 더 좋은 시스템 이해와 문제 해결에 유용하다. 1.3.1 운영 이론 iTrolley는 브리지나 매달린 부하를 정확히 위치시키기 위해 닫힌 루프 피드백 시스템을 이용한다. 제어 알고리즘은 그 시스템에서 입력/피드백 센서와 다른 iTrolley와 연속적인 통신에 있는 온-보드 컴퓨터를 운영한다. iTrolley는 운영자 의도와 그것의 위치에 대한 자체의 지식과 같은 입력을 가지고 적절히 부하를 움직이게 하는 속도와 위치를 적용한다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 17 -
입력/피드백 소스 iTrolley는 인텐드 센서를 통해 운영자로부터 초기의 입력을 수신한다. 이 센서는 운영자가 부하를 움직이고자 하는 방향과 속도를 결정하고 시스템 콘트롤러에 정보를 보낸다. 위치 피드백은 2개의 소스에서 온다. 첫째는 모터의 상대적인 위치를 측정하기 위한 서보 모터 위의 엔코더이다. 둘째는 레일 위에 설치된 마그넷이다. 매번 iTrolley는 이 마그넷을 통과한다. iTrolley 위에 설치된 홀 이펙트 센서는 컴퓨터에 신호를 보내고 레일에 따른 iTrolley의 절대적인 위치의 계산을 업데이트한다. 이것은 드라이브 메카니즘에서 미끄러짐 때문에 야기되는 위치 에러의 증가를 조절한다. 고객들은 iTrolley 드라이브 롤러가 항상 레일과 접촉하지 않거나 정확한 위치 요구가 매우 엄격한 시스템에서 더욱 정확한 위치 인식을 유지하는 추가적인 두번째 엔코더를 추가할 수 있다. 제어 기능제어 알고리즘은 인텐드 센서에 의해 측정된 운영자 목적을 위해 여러가지 법칙을 적용한다. 이런 법칙은 위치 제한, 속도 제한과 사용자가 프로그램 가능한 이점을 포함한다. 위치 제한이나 가상의 멈춤은 iTrolley 위에 설치된 버튼에 의하여 어떤 시간에든 프로그램될 수 있다. 그것은 레일 시스템의 물리적인 치수와 작업 환경에 의존한다. 속도 제한은 6.6ft/s(2m/s)까지 사용자가 프로그램할 수 있다. 사용자 프로그램의 이점은 가능한 한 편안하고 효율적으로 특별한 부하를 움직이도록 설정할 수 있다. 더 높은 이점은 더 낮은 이점이 더 좋은 장애 제거를 제거하는 동안 더 빠른 부하 이동을 제공한다. 움직임드라이브 메커니즘은 제어 알고리즘에서 iTrolley를 이동하기 위한 신호에 반응한다. 서보 모터는 기어 박스를 통하여 드라이브 롤러를 움직인다. 매뉴얼이나 공압 드라이브 메커니즘은 레일의 바닥에 대해 드라이브 롤러를 밀고 나아간다. 공압 시스템에서 공기압은 일어날 수 있는 움직임을 위한 드라이브 메커니즘에 적용되어야 한다. 시스템은 어떤 방향에서든 6.6ft/s(2m/s)까지 움직일 수 있다. iTrolley는 300 lb(136 kg) 부하를 12.9 ft/s2 (4 m/s2)에서 가속할 수 있다. 기본적인 (EN 954-1) E-스톱 회로E-스톱 스위치는 모터 증폭기와 iTrolley의 온-보드 릴레이에 전원을 연결한다. E-스톱 스위치는 허브의 뒷면에 연결된다. 섹션 2.2.5의 엔드-이펙트 E-스톱 스위치를 참조한다.
주의 : E-스톱 스위치가 실패하면 가상의 한계는 없어진다. iTrolley는 가상 한계를 회
복하기 위해 마그넷을 지나가야만 한다.
주의 : 멈춤(빨간 버튼을 누른 상태)이나 잘못된 조건에서 드라이브를 가지고 iTrolley를 매뉴얼로 운영하지 마라. 이 방법에서 모터를 백드라이브하는 것은 모터나 다른 부품에 손상을 초래할 수 있는 모터 안에 과도한 열을 발생시킬 수 있다.
1.3.2 공통 작업 이런 작업은 단지 적어도 하나의 iTrolley, 허브와 케이블 앵글 센서와 같은 인텐드 센서를 가진 시스템에서 수행될 수 있다. 시스템 전원 업전원이 처음 공급되었을 때 iTrolley 위의 녹색 전원 지시기는 점등될 것이다. 허브 위의 모든 지시등은 점등될 것이고 허브 디스플레이는 “CO”를 읽을 것이다. 컴퓨터는 초기화하고 시스템에서 다른 구성품과 통신을 설정할 것이다. 대략 50초안에 허브 디스플레이는 선택된 마지막 프로파일(전형적으로 “P1”)을 보여줄 것이고 단지 허브 위의 빨간 지시기는 점등될 것이다. 추가적인 확인전원이 처음 공급되었을 때 한계 지움을 위한 주황색 등이나 한계 설정을 위한 녹색 등은 점등되지 않을 것이다. iTrolley가 레일 마그넷을 지나갔을 때 한계가 활성화되는지 여부를 지시할 것이다. 하나나 두개의 한계가 과거에 설정되었다면 주확색 등은 꺼진 상태일 것이고 하나나

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 18 -
두개의 녹색등은 점등될 것이다. 이것은 한계가 활성화되었고 시스템이 정상적인 운영준비가 되었음을 지시한다. 한계가 이전에 설정되지 않았다면 주황색 등이 점등되고 한계 설정이 없다고 보여준다. 아래의 “X-Y 한계 설정”을 참조한다. X-Y 한계 설정시스템에 전원과 공기압을 적용하고 허브의 “P1” 지시를 기다린다. 한계는 3개의 하부 버튼을 사용하여 설정한다. 주황색 버튼은 이동 한계를 지우고 각 녹색 버튼은 2개의 이동 한계중 1개를 설정한다. 마그넷은 예상된 작업 사이클 안에 있어야 한다. 주행 iTrolley 위에 한계를 설정하기 위해서는 그것의 경로안에 있는 레일 마그넷을 가진 iTrolley 위의 주황색 버튼을 누른다. 주황색 등은 한계가 지워졌다는 것을 지시하며 점등될 것이다. 다음은 이동의 처음 한계를 위해 마그넷을 지나간 주행 iTrolley를 움직인다. 한계를 설정하기 위해 이동 방향에서 가장 가까운 녹색 버튼을 누른다. 주황색 등은 새로운 한계가 설정되었음을 지시하며 소멸될 것이다. 마그넷을 지나는 이동의 두번째 한계를 위해 iTrolley를 움직이고 이동의 다른 한계를 설정하기 위해 다른 녹색 버튼을 누른다. 한계 사이에서 iTrolley를 앞쪽과 뒤쪽으로 움직이며 이것을 확인한다. 마그넷이 2개의 한계사이에 있어야 함을 알려준다. 브리지 iTrolley위의 한계는 동일한 방법에서 설정한다. Figure 11은 X-Y 한계를 설정하는 방법의 예를 보여준다.
주의 : iTrolley에 축적된 손상을 방지하기 위해 가상 한계가 반복된 기초에서 단단한 엔드 스톱과 충돌하지 않는 그런 방법에서 설정되는 것이 중요하다.
Figure 11 – X-Y 한계 설정
일반적인 운영각 iTrolley는 1000 lbs (453.6 kg)의 부하를 다룰 수 있다. 그러나 시스템의 와이어 로프에서 최대의 시스템 부하는 수직 리프트 장치와 인라인 허브에 의해 제한을 받는다. iTrolley의 부하 이송 능력이 제한 요소라면 iTrolley는 부하를 앞이나 뒤에서 밀고 당기기 위해 설정되어 질 수 있다. 이런 적용에서 부하는 수동적인 trolley에 의해 운반되고 iTrolley는 끄는 역할을 한다.
경고 : 부하의 경로에 걸려있는 Stanley Cobotic의 허브를 포함하는 시스템의 경우 수
직 리프트 장치의 최대 능력의 밑이나 상해나 죽음을 야기할 수 있는 450lbs를 초과
하지 않는다. 매뉴얼 모드로 돌아가는 것iTrolley는 레일 표면에서 드라이브 롤러를 떼어 매뉴얼, 무동력 모드로 설정되어질 수 있다. 이것은 공압 시스템에서 드라이브 롤러 시스템의 에어 실린더에 에어를 차단하거나 스프링-인게이지 시스템의 스프링 압축 너트를 느슨하게 함으로 행해진다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 19 -
Chapter 2: 사용자 인터페이스2.1 서론 사용자 인터페이스(허브)는 중요한 사용자 인터페이스이고 시스템 제어의 하나의 수단이다. 5개의 푸쉬 버튼을 사용하여 명령을 받고 시스템 상태 지시는 4개의 컬러 등과 2개 문자의 LED 화면으로 제공한다. 2.1.1 안전 허브는 아래의 표준을 따른다.
BSR/T15.1 Standard for Intelligent Assist Device (IAD) – Personnel Safety Requirements American National Standards Institute
ANSI B30.11 Monorail Systems & Underhung Cranes ANSI B30.17 Overhead and Gantry Cranes
Crane Manufacturers Association of America CMAA Specification 70
National Electric Code NEC Article 610 Cranes and Hoists
Occupational Safety & Health Administration OSHA CRF 1910.179
Monorail Manufacturers Association MG 27.2 Specification for Underhung Cranes and Monorail Systems
2.1.2 스펙
온도 범위 : 0 °C에서 +60 °C, 운영 (-10 °C에서 +85 °C 비운영) 습도 : 10에서 90% 비응축, 운영 (5에서 95% 비응축, 비운영) 무게: 최대 500 lbs
2.2 설치 이 섹션은 와이어 로프에 허브를 거는 과정을 설명한다. 추가적인 엔드 이펙트가 사용되면 이를 수행하기 위해 추가적인 와이어링이 있을 것이다. 이것을 위한 지침은 하나씩 제공된다. 2.2.1 구성품 식별
Figure 12 – 버튼 모듈과 후크 인터페이스를 가진 허브의 정면도 설명
LED 화면2개 문자 LED 화면은 에러 코드를 포함하여 시스템 메시지를 보여준다. 상태 표시 등등은 아래의 의미를 나타낸다. RED : 빨간 지시기는 장치가 멈추거나 실패했음을 의미한다. IAD 시스템이 iLift와 한 개 이상의

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 20 -
iTrolley로 구성된 경우 녹색 LED와 함께 반짝이는 빨간 등은 시스템이 케이블 슬랙을 가지고 초기화되는 것을 보여준다. 이 상태에서 iLift는 초기화되지만 iTrolley는 제기능을 하지 않는다. 시스템이 완전한 기능을 가지기 위해서는 케이블 슬랙 조건을 제거하기 위해 iLift를 사용하고 시스템을 멈추고 재시작한다. GREEN : 녹색 지시기는 시스템이 준비상태임을 의미하고 hands-on-control 모드에서 운영될 것이다. BLUE : 파란 지시기는 hands-on-pay부하나 float 모드로 알려진 수직 시스템 움직임이 pay부하나 툴에 적용된 운영자의 힘에 의해 발생되었음을 의미한다. FLASHING YELLOW : 반짝이는 노란 지시기는 hands-off 모드로 알려진 시스템이 제어 인터페이스, pay부하나 엔드 이펙트에 운영자의 힘이 가해지지 않고 자동으로 움직일 수 있음을 의미한다. 보조 버튼검은 보조 버튼은 특정한 응용 버튼이다. 시스템 멈춤 버튼허브의 앞과 뒤쪽에 각각 한 개씩 있는 빨간 버튼은 콘트롤러 시스템 움직임을 멈춘다. iLft를 가진 시스템에서 수직 브레이크는 보증될 것이다. iTrolley 시스템에서 시스템은 무동력 브리지 크레인 시스템과 같이 움직일 것이다.: 시스템이 멈춰진 시간의 속도를 유지할 것이다.
이 버튼은 시스템을 멈추는 중요한 수단이다.
시스템 리셋 버튼이 녹색 버튼은 정상적인 운영을 입력하는데 사용된다. 사용자 프로파일 선택 버튼이 버튼들은 시스템이 멈춘동안 8개의 다른 사용자 프로파일 중 한 개를 선택하는데 사용된다. 시리얼 컨넥터사용자 프로그램 설정은 RS-232 시리얼 인터페이스를 사용하여 변경될 수 있다.(섹션 2.3.4 RS-232 인터페이스를 참조) 터미널 블럭
Figure 13 – 버튼 모듈을 가진 허브의 배면도 설명
허브의 뒷면 커버를 제거하면 특별한 용도의 목적을 가진 16핀 플러그 터미널 블록이 나타난다. 이런 특성은 사용자 엔드 이펙트 인터페이스나 로컬 이머젼시 스톱 스위치를 포함한다. 아래는 핀과 기능에 대한 표이다. 디지털 입력은 적절한 TTL 레벨을 요구하고 아날로그 입력의 범위는 0에서 5볼트 DC이다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 21 -
Table 1 – 허브 터미널 블록 핀 아웃
2.2.2 설치 허브 상단의 브라켓에 부싱을 놓는다. 부싱을 지나 대략 3인치의 길이를 남기고 부싱 주위에 와이어 로프를 라우팅한다. 끝단을 고정하기 위해 적어도 2개의 와이어 클립(Crosby Clamp)이나 한 개의 배럴 클립을 사용하고 너트가 끝단에서 떨어진 곳에 있는지를 확인한다.
경고 : 와이어 로프 끝단은 허브의 다른 부분이나 코일 코드 컨넥터와 접촉하지 않도
록 절단되어 있어야만 한다. 그렇게 하지 않으면 시스템에 손상이나 상해를 주는 이
상 움직임을 초래할 수 있다. 에러 코드 22는 이런 문제를 나타낸다.
경고 : 와이어 로프를 위해 Stanley Cobotics가 승인한 와이어 로프 피팅을 사용한다. 그렇지 않으면 와이어 로프의 실패나 상해 또는 죽음을 초래할 수 있다.
경고 : Stanley Cobotics가 승인한 부싱이나 비전도체 타입의 부싱을 사용한다. 그렇지 않으면 와이어 로프의 실패나 상해 또는 죽음을 초래할 수 있다.
2.2.3 케이블 연결 와이어 로프 주위의 코일 코드를 묶고 허브 상단의 컨넥터에 꽂는다.(Figure 12 참조)
경고 : 전원이 공급되는 동안 코일 케이블을 꽂거나 빼지 않는다. 그렇지 않으면허브
에 손상을 줄 수 있다.
2.2.4 후크 설치 후크는 풀어지는 것을 방지하기 위해 1/8” 롤(정렬) 핀을 가지고 설치해야만 한다.
단계 1. Figure 14처럼 허브 후크 인터페이스(T-Portion)에 후크를 조이고 Figure 14에서 보여주는 것처럼 후크와 T-Portion을 평행하게 일치시킨 후 후크가 완전히 조여지지 않았는지를 확인한다. 완전히 조여졌으면 후크가 열리지 않을 수 있다. 가이드처럼 T-Portion에 있는 홀을 사용하여 나사산이 있는 로드를 통하여 18/” 홀을 내고 롤 핀을 삽입한다.

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 22 -
Figure 14 – 허브에 후크를 설치하는 방법 설명
단계 2. Figure 15에서 설명된 것처럼 허브 밑에서 후크와 T-Portion 조립품을 삽입하고 90도
회전시킨 후 4개의 셀프 록킹을 설치하고 도그 포인트를 조인다. 후크는 Figure 15에서 보여지는 것처럼 허브 LED 표면과 수직이어야만 한다.
Figure 15 – 허브안에 후크와 허브 후크 인터페이스 조립 방법 설명
만약 포스 센싱 모듈과 인라인 핸들을 설치하려면 아래의 그림에 보여진 것과 같이 후크를 설치하는 단계와 유사하다. 후크가 열리는지를 확인하고 후크는 Figure 15에서 보여지는 것처럼 허브 LED 표면과 수직이어야만 한다.
단계 3. 버튼 모듈이나 포스 센싱 모듈을 설치한다. Figure 15와 Figure 16이 보여주는 것처럼 버튼/포스 센싱 모듈은 2개의 M4 X 35/M4 X 50 볼트에 의해 허브에 체결된다. 2개의 M4 X 16 볼트는 버튼/포스 센싱 모듈 반쪽 2개를 함께 잡아준다. 첫째, 버튼/포스 센싱 모듈과 허브 보드를 전기적으로 연결한다. 둘째, 버튼/포스 센싱 모듈의 뒤쪽 반을 허브에 긴 M4 볼트를 사용하여 부착한다. 포스 센싱 모듈에서 포텐시오미터에 부착된 플라스틱 엔드 캡의 홈이 인라인 핸들의 가장자리와 맞물렸는지를 확인한다. 마지막으로, 짧은 M4 볼트를 사용하여 버튼/포스 센싱 모듈의 앞쪽 반을 부착한다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 23 -
Figure 16 – 인라인 핸들을 가진 후크 설치 방법 설명
경고 : 후크를 고정시키지 않고는 부하를 올리지 말아야 한다. 후크는 공장에서 고정
되지 않고 시스템을 설치하는 동안 위의 단계 1에서 고정되어야만 한다.
2.2.5 엔드-이펙트 E-스톱 스위치 설치 로컬 E-스톱 스위치는 허브의 뒤에 위치한 터미널 블록의 2번과 3번 핀에 와이어링 접촉 도체를 사용하여 설치될 수 있다. E-스톱은 Figure 17에 보여진 것처럼 엔드 이펙트 위에 설치되거나 Figure 18에 보여진 것처럼 Stanley Cobotic이 제공한 브라켓을 사용하여 허브의 사이드에 설치될 수 있다. IAD 안전 기준 T-115는 E-스톱을 요구한다.
Figure 17 – 허브에 엔드-이펙트 E-스톱 스위치(Part # 9904-2001) 연결 설명

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 24 -
Figure 18 – E-스톱 스위치가 설치된 허브(Part # 9904-2202)
2.3 운영 이 섹션은 iTrolley 시스템에 설치된 것처럼 허브의 운영을 자세히 설명한다. 허브는 운영자를 위한 주요한 입력/출력 장치이고 아래의 섹션은 효과적으로 시스템을 이해하고 운영하는데 중요하다. 2.3.1 운영 이론 허브는 중요한 사용자 인터페이스이고 시스템 제어의 하나의 수단이다. 5개의 푸쉬 버튼을 사용하여 명령을 받고 시스템 상태 지시는 4개의 컬러 등과 2개 문자의 LED 화면으로 제공한다. 허브의 뒤쪽에 있는 터미널 블록은 로컬 이머젼시 스톱 스위치; 디지털과 아날로그 입력과 디지털 입력과 같은 사용자 특성을 위한 연결을 제공한다. 추가적인 사용자 특성은 사용자 공급 엔드 이펙트를 사용하여 연결될 수 있다. 허브는 회전하는 상단의 부착 포인트를 가진다.
주의 : 회전 이음쇠가 항상 자유롭게 회전하는지, 너무 빠른 케이블 마모가 발생할지
를 확인한다.
2.3.2 운전시작 순서 전원이 처음 공급되었을 때 모든 지시등은 점등되고 화면은 “CO.”를 읽을 것이다. 컴퓨터는 초기화하고 시스템에서 다른 컴퓨터와 통신을 시작할 것이다. 대략 50초 이내에 화면은 선택된 마지막 프로파일(전형적으로 “P1”)을 보여주고 단지 빨간 지시기는 점등될 것이다. 2.3.3 공통 작업 시스템 멈춤 버튼2개의 빨간 시스템 멈춤 버튼은 시스템 움직임을 멈출 것이다. 빨간 지시등은 점등되고 화면은 현재의 사용자 프로파일 설정(전형적으로 “P1”)를 보여줄 것이다. 이 상태에서 부하는 부착되거나 제거될 수 있고 다른 사용자 프로파일이 선택될 수도 있다.
경고 : 수직 리프트 장치의 최대 능력의 밑이나 상해나 죽음을 야기할 수 있는 450lbs를 초과하지 않는다.
시스템 리셋 버튼시스템 리셋 버튼은 멈추어진 상태에서 운영을 위한 hands-on-control 모드로 상태를 변경하는 Conbotics IAD를 가능하게 한다. 버튼을 누른 후 빨간 등은 점등된 상태로 남아있고 시스템이 케이블 앵글 센서(CAS)를 가진 iTrolley를 적어도 한 개 가지고 있다면 녹색 등은 대략 5초정도 깜박거릴 것이다. 이 시간동안 케이블 앵글 센서는 눈금조정을 하는데 버튼을 누르거나 그렇지 않으면 pay부하를 방해하므로 인해 와이어 로프에서의 움직임이 없는 것이 중요하다. 이 캘리브레이션 동안 움직임이 있다면 녹색등은 반짝거리지 않을 것이다. 빨간 등은 점등되어 있고 화면은 “21:을 보여줄 것이다. 또한, payloa나 엔드 이펙트가 어떤 것도 매달고 있지 않음을 확인하고 와이어 로프가 수직으로 걸려있지 않도록 하는 것이 중요하다. 캘리브레이션이 완료된 후 빨간 등은 꺼지고 시스템이 운영준비가 되었음을 지시하는 녹색 등이 점등될 것이다. 독립적인 iLift와 같은 CAS가 없는 시스템의 경우 시스템은 초기화 단계를 건너뛰고 직접 녹색 등이 켜지고 운영할 수 있는 상태로 간다. 시스템은 멈춤에서 운영으로 변경되는 동안 여러가지 다른 안전을 확인한다. 시스템이 어떤 에러를 확인하면 허브 LED 화면에 에러 코드를 표시하고 멈춰진 상태에 남겨질 것이다. 적어도 iTrolley를 가진 iLift로 구성된 IAD 시스템의 경우 iLift는 케이블 스택 상태를

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 25 -
감지하면 iLift를 활용하게 하고 iTrolley를 사용하지 못하도록 한다. 허브는 빨간 등을 깜박거리고 허브 위의 녹색 등을 점등하여 이 상태를 표시한다. IAD 시스템을 완전히 활성화시키기 위해서 케이블 스택 상태를 제거하기 위해 iLift를 사용한 다음 멈추고 시스템을 재시작한다. 시스템 메세지 섹션 문제해결을 참조한다. 2.3.4 RS-232 인터페이스 허브 밑의 RS-232 인터페이스는 iTrolley 환경의 소프트웨어를 가지고 통신하는데 사용된다. 다음은 터미널 프로그램과 시리얼 인터페이스를 사용하여 사용자 설정을 프로그램하는 명령이다. 윈도우 하이퍼 터미널과 같은 시리얼 포트를 통해 연결할 수 있는 터미널 프로그램이 사용될 수 있다. 9600 baud, 8N1, 플로우 제어: NONE에서 컴 포트 1을 통해 통신하기 위해 터미널 프로그램을 설정한다. Chapter 4 : 사용자 인터페이스 소프트웨어를 참조한다.

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 26 -
Chapter 3: 인텐트 센서3.1 서론 3.1.1 디자인 표준 케이블 앵글 센서는 아래의 표준을 따른다.
BSR/T15.1 Standard for Intelligent Assist Device (IAD) – Personnel Safety Requirements National Electric Code
NEC Article 610 Cranes and Hoists Occupational Safety & Health Administration
OSHA CRF 1910.179 3.1.2 스펙
온도 범위 : 0 °C에서 +60 °C, 운영 (-10 °C에서 +85 °C 비운영) 습도 : 10에서 90% 비응축, 운영 (5에서 95% 비응축, 비운영)
3.2 케이블 앵글 센서케이블 앵글 센서(CAS)는 의도한 방향에서 운영자가 부하를 움직이는 것을 감지하기 위해 비접촉 센싱을 사용한다. 수직에서 와이어 로프가 모앵글로 비뚤어짐을 측정한다. 비뚤어짐의 이런 측정은 iTrolley 제어 시스템에서 중요한 입력이다. 3.2.1 설치 케이블 앵글 센서 안쪽 부분은 사용자가 서비스할 수 있는 것이 아니다. 단지 와어이 로프를 위한 중앙 오리피스와 장치의 옆에 있는 통신 컨넥터가 있다. 정션 박스는 옆에 부착되고 케이블 앵글 센서와 허브(사용된다면 iLift를 통하여)에서 마스터 iTrolley까지 정보를 전달한다. 구성품 식별
Figure 19 – 정션박스를 가진 케이블 앵글 센서 설명
케이블 앵글 센서 하우징 하우징 안쪽 부분은 사용자가 서비스할 수 있는 것이 아니다.
설치 포인트 케이블 앵글 센서를 설치하기 위해 4개의 볼트가 이 홀을 통해 지나간다.
정션 박스 코일 코드는 허브에서 정션 박스 뒤쪽으로 온다. 정션박스 앞쪽의 컨넥터는 케이블 앵글 센서 자체에서 (사용된다면 iLift로) 마스터 iTrolley까지 온다. 케이블 앵글 센서 설치 적용된 배열을 위한 지침을 따른다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 27 -
iLift 수직 리프트 장치
Figure 21 – 전통적인 에어 발란서와 케이블 앵글 센서를 가진 에어 발란서 브라켓 설명
와이어 로프 가이드 밑의 브라켓에 케이블 앵글 센서를 부착한다(Figure 20). 코일 코드 가이드 링은 아래를 가리켜야 하고 정션 박스는 iLift를 위한 컴퓨터 플레이트와 전원 컨넥터와 동일한 쪽에 위치해야 한다.
경고 : 공급된 스크류나 록킹 패치나 록타이트를 가진 스크류를 사용한다. 그렇게 하
지 않으면 시스템에 손상이나 상해를 주는 이상 움직임을 초래할 수 있다. 에러 코
드 26은 이런 문제를 나타낸다.
다른 수직 리프트 장치
Figure 21 – 전통적인 에어 발란서와 케이블 앵글 센서를 가진 에어 발란서 브라켓 설명
에어 발란서 브라켓을 브리지 iTrolley에 부착한다. 정션 박스가 시스템에서 첫번째 iTrolley 위의 컨넥터와 같은 방향에 있고 코일 코드 가이드 링이 아래를 가리키도록 하기 위해 케이블 앵글 센서를 브라켓 아래에 설치한다. 보기 Figure 21을 참조한다.
경고 : 공급된 스크류나 록킹 패치나 록타이트를 가진 스크류를 사용한다. 그렇게 하
지 않으면 시스템에 손상이나 상해를 주는 이상 움직임을 초래할 수 있다. 에러 코
드 26은 이런 문제를 나타낸다.
Figure 22에서 보여진 유니버셜 브라켓 부쉬는 Figure 23에 보여진 것처럼 케이블 앵
글 센서 엔드 브라켓 안의 풀리에 적절한 그라운드 접촉을 유지해야만 한다. 그렇
지 않으면 에러 코드 22를 초래할 수 도 있다.

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 28 -
Figure 22 – 일반적인 브라켓 부쉬와 구성품
Figure 23 – CAS 엔드 브라켓에서 풀리에 일반적인 브라켓 부쉬 그라운드 접촉
케이블 연결 정션 박스는 2개의 통신 케이블 컨넥터를 가진다. CAS의 중앙을 바라보는 컨넥터는 허브를 향하는 코일 케이블을 위한 것이다. CAS의 바깥쪽에 있는 컨넥터는 시스템의 배열에 의한 iLift나 iTrolley에 CAS 입력을 전달하는 케이블을 위한 것이다.
경고 : 코일 케이블을 꽂거나 빼기 전에 전원을 해제한다. 그렇지 않으면 허브에 손
상을 줄 수 있다.
경고 : iLift나 iTrolley와 CAS 사이의 신호 케이블을 꽂거나 빼기 전에 전원을 해제한
다. 그렇지 않으면 CAS에 손상을 줄 수 있다.
3.2.2 운영 케이블 앵글 센서와 운영자의 상호작용은 더 큰 시스템의 일부로 설치되었을 때 아주 작아진다. 그 것의 기능은 운영자에게 주로 투명하게 전달된다. 다음의 정보는 시스템을 더욱 이해하고 문제해결하는데 본질적으로 유용하다. 운영 이론 케이블 앵글 센서는 의도한 방향에서 운영자가 부하를 움직이는 것을 감지하기 위해 비접촉 센싱을 사용한다. 케이블 앵글 센서에서 측정된 수직에서 비뚤어짐이 측정되고 비뚤어짐의 이런 측정은 iTrolley 제어 시스템에서 중요한 입력이다. 공통 작업 케이블 앵글 센서는 운영자에게 완전한 시스템의 전달을 위한 부분으로 운영된다. 직접 운영자를 포함하는 작업이나 운영은 없다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 29 -
Chapter 4: 옵션 장치4.1 iNode iNode는 iTrolley 시스템에 추가적인 사용자 감지와 통신 능력을 지원한다. 4.1.1 설치 구성품 식별
Figure 24 – iNode 박스 설명
I/O 컨넥터 6개의 컨넥터는 아래 사항을 일부분이나 모두를 제공한다. 독점적인 CAN 통신은 2개의 추가적인
엔코더 연결, PLC 적용시 사용되는 2개의 I/O 컨넥터를 통하여 지나간다.
상태 램프
상태 램프는 전원 이용가능성(녹색)과 iNode 실패 조건(빨간색)을 지시한다.
설치 iNode는 멈추고 있는 곳(예를 들면 컬럼)에 설치되어야 한다.

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 30 -
Figure 25 – iNode 설치 치수
iNode는 iNode에서 가장 가까운 iTrolley사이에 운영되는 케이블은 70피트를 넘지
않도록 설치되어야 한다.
엔코더가 iNode에 연결된다면 엔코더와 iNode 사이의 케이블 길이은 60피트를 넘지
않도록 설치되어야 한다.
케이블 연결 특별한 적용을 위한 필수 요소로서 케이블을 연결한다.
단지 CAN 통신 케이블이 iNode에 연결된다면 Terminator는 CAN 통신 컨넥터 위
에 설치되어야 한다.
4.1.2 운영 운영 이론 Stanley Cobotic의 독점적인 CAN 통신, 추가적인 엔코더(즉, 라인 트랙킹 엔코더)나 PLC
인터페이스 신호가 모두 사용될 수도 있고 iNode를 통하여 iTrolley 시스템을 통하여 전달될 수
있다. 이것은 일반적인 iTrolley의 I/O 능력을 넘어선 사용자 특성의 추가를 가능하게 한다.
공통 작업 iNode는 운영자에게 완전한 시스템의 전달을 위한 부분으로 운영된다. 직접 운영자를 포함하는 작업이나 운영은 없다. 4.2 피기 백 엔코더 피기 백 엔코더는 표준 모터 엔코더보다 더욱 정확한 위치 신호를 제공한다. 코터 엔코더는
레일에서 드라이브 롤러의 미끄러짐을 설명할 수 없다. 추가적인 정확성은 특히 자율적인 모드나
조립 라인을 움직이는 트랙킹을 포함한 적용에 유용하다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 31 -
4.2.1 설치 구성품 식별
Figure 26 – 피기 백 엔코더 설명 (Part #. 2801-0001)
엔코더
엔코더는 수평이동에 상응하는 디지털 신호를 생성한다.
롤러
롤러는 iTrolley가 라인 트랙킹 적용에서나 레일을 따라 움직이는 것처럼 또는 조립 라인이 피기
백 엔코더를 지나 이동하는 것처럼 엔코더를 회전시킨다.
롤러 인게이지 스프링
스프링은 롤러가 레일에서 발생하는 미끄러짐을 방지하기 위해 적당한 마찰을 가지고 있다.
설치
Figure 27 – 피기 백 엔코더 설치 설명
피기 백 엔코더는 Figure 27에 보여진 것처럼 iTrolley의 옆이나 더미 Stanley Cobotic trolley
몸체에 설치한다.

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 32 -
케이블 연결
Figure 28 – iTrolley 드라이브 메커니즘과 컴퓨터 플레이트 조립 설명 (trolley 몸체는 유틸리티 컨넥터를 보여사이클 위해 삭제되었음)
피기 백 엔코더의 컨넥터는 컴퓨터 플레이트 뒤의 유틸리티 컨넥터 안에 직접 연결한다.
약간의 응용은 iTrolley 유틸리티 컨넥터에 연결된 정션 박스를 가질 수 있다. 그런
경우에 피기 백 엔코더는 정션 박스 안에 연결할 수 있다.
4.2.2 운영
운영 이론 엔코더는 증가되는 상대적인 위치를 나타내는 진동을 보낸다. 각 진동은 수평이동의 량을 나타낸다.
절대적이거나 홈 포지션은 레일 마그넷을 읽는 홀 센서 같은 센서로부터 나온다. 정확성은 롤러가
얼마나 직선으로 설치되었는지 시스템이 레일을 얼마나 자주 지나가고 홈 포지션을 얼마나 자주
업데이트하는지에 매우 의존한다.
공통 작업 피기 백 엔코더는 운영자에게 완전한 시스템의 전달을 위한 부분으로 운영된다. 직접 운영자를 포함하는 작업이나 운영은 없다.
iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 33 -
Chapter 5: iTrolley 사용자 인터페이스 소프트웨어5.1 물리적 연결 허브 밑에 있는 RS-232 포트는 iTrolley 배열 소프트웨어와 통신하기 위해서 사용된다. 다음은 터미널 프로그램과 시리얼 인터페이스를 사용하는 사용자 설정을 프로그램하기 위한 명령이다. 윈도우 하이퍼 터미널과 같은 시리얼 포트를 통해 연결할 수 있는 터미널 프로그램이 사용될 수 있다. 하이퍼 터미널은 보통 악세서리/통신에서 발견된다. 아래의 설정과 같이 터미널 프로그램을 설정한다.
Bits per second : 9600 Data bits : 8 Parity : none Stop bits : 1 Flow control : none
주의 : 하이퍼 터미널을 운영하기 전에 컴퓨터 시리얼 통신 포트를 사용하는 다른
모든 시리얼 통신 프로그램을 닫아야만 한다. 예를 들면, Palm Pilot Synch 프로
그램
허브에 케이블 연결은 female DB9이다. 대부분의 PC 연결을 위해 요구되는 케이블은 female DB9이다. 널 모뎀 케이블은 요구되지 않는다. 아래의 설명에서 하이퍼 터미널 세션이 이 폰트에서 밝게 빛나는 동안 사용자가 볼 수 있는 것이다. 5.2 운영 다음은 허브에 연결되었을 떄 하이퍼 터미널에 표시되는 메인 메뉴이다.
자유로운 움직임이 가능할 때 표시된다.
iLift가 연결되었을 때는 표시되지 않는다.
데드맨 스위치가 가능할 때 표시된다.
iLift가 연결되었을 때는 표시된다.
5.2.1 아답티브 게인 일반적으로 CAS 민감도와 CAS 데드밴드를 위한 더욱 민감한 설정(더 높은 민감도와 더 적은
데드밴드 설정)은 더 무거운 pay부하를 움직이는데 유용하다. 그러나 전형적으로 운영 사이클동안

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 34 -
운영자는 사이클의 일부분으로 무거운 부하(엔드 이펙트에 pay부하를 더함)를, 동일한 사이클의
일부분으로 가벼운 부하(빈 엔드 이펙트)를 움직일 것이다. 단순한 민감도 설정이 사이클의 양쪽
부분을 위해 사용된다면 사이클의 무거운 부하 부분동안 수행 능력을 감소시키는 가벼운 부하를
위해 적당한 값을 설정해야 한다. 그러므로 사이클동안 충분한 무게의 변화가 있는 운영에서
사용자가 시스템을 더 좋게 제어하기 위해서 다른 pay부하 무게를 위해 사용자가 다른 민감도와
데드밴드 값을 설정하게 한다. 이것이 아답티브 게인 스케쥴링 특성이다.
다른 민감도 설정을 가질 수 있는 4개의 배열 무게 범위가 있다. 무게 구분을 정의하는 무게
한계는 사용자가 프로그램 가능하다. 각각 4 구역의 낮은 부분을 위한 기본 값은 구역 1 ; 1Kg,
구역 2 ; 10Kg, 구역 3 ; 25Kg 그리고 구역 4 ; 90Kg이다. 즉, 구역 1은 1 ~ 10Kg이고 구역 2는
10 ~ 25Kg이다. 아답티브 게인의 개념은 Figure 20과 21에 보여진다.
Figure 29 – 아답티브 게인 CAS 민감도 설정
비례 버튼이 사용 가능하면 보여진다.
터보 특성이 사용 가능하면 보여 진다.
사용자가 새로운 무게 한계를 선택하려면 새로운 무게는 구역 1에서 구역 5까지 동일한 일반적인
증가 경향을 따라야 한다는 것을 알아야 한다.
각 구역에서 공칭의 민감도 파라미터는 사용자 설정량에 의해 수정될 수 있다. 공칭의 민감도
설정은 현재 설정된 사용자 프로파일(1에서 8까지)안의 파라미터 셋이다. 이런 파라미터(CAS
민감도와 CAS 데드밴드)는 각 무게 구분을 위해 변경되어질 수 있는 바닥 선을 형성한다. 각
무게 구분에서 공칭 값은 퍼센티지 량에 의해 높거나 낮게 설정될 수 있다. 예를 들면, 사용자
프로파일 설정에서 사용자는 공칭 CAS 민감도를 40으로 설정할 수 있다. 아답티브 게인 스케쥴링
옵션, Enter sensitivity as % change from nominal, 구역 1에서 80으로 설정하여 민감도를
감소시킬 수 있다. CAS 민감도는 공칭 값인 40의 80%인 32와 같다. 공칭 40의 민감도를
유지하기 위해 사용자는 100%를 위한 100을 입력한다. 민감도를 증가시키기 위해 100보다 더 큰
수를 입력한다. 유사하게 CAS 데드밴드는 다른 무게 구역에서 수정될 수 있다. 더 낮은 설정이
더욱 민감한 반응에 해당한다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 35 -
Figure 30 – 아답티브 게인 CAS 움직이지 않는 밴드 설정
가상 운동량이 현재의 프로파일에서 사용 가능하다면 선택적으로 사용 사능하거나 각 무게
구간에서는 사용이 불가능할 수 있다.
주의 : 무게가 구역 1의 낮은 무게 한계 밑으로 떨어지면 시스템은 움직임을 멈출
것이다.
‘sp’ 옵션을 사용하여 변경 내용을 저장하는 것을 기억한다.
5.2.2 자유로운 움직임 파라미터
경고 : 자유로운 모드의 활성화는 BSR/15.1 ,Standard for Intelligent Assist Devices와 같은 완전한 위험 평가의 응용에 따라야만 한다.

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 36 -
자율적인 움직임 움직임은 수반되거나 완전히
자유로워질 수 있다. 수반된 자율적 움직임(때로는 반-자율적 움직임이라고 불림)은 사용자가
직임이 완결될 때까지 스위치를 계속 밑으로 잡고 있어야 함을 의미한다. 완전히 자유로운
수 있다. 이 무게는 Autonomous
otion minimum required 부하. 메뉴 라인에서 사용자 정의될 수 있다.
이에서 앞뒤로 움직일 수
다. 이런 특성은 빈 엔드 이펙터 무게보다는 무겁지만 짐을 실은 엔드 이펙터 무게보다는 가벼운
는 표시되지 않는다.
사용하는 것은 더욱
확성을 줄 것이다. 속도에 근거한 자율적인 움직임은 자율적인 움직임동안 케이블 앵글 센서로
수 있게 한다.
큰 입력이
지되면 시스템은 자율적인 모드에서 벗어난다. 이것은 만약 end effector가 어떤 것을 잡고
현재의
치를 설정할 수 있다.
그넷을 지나가야만 한다. 시스템이 iLift를 포함하고 있다면 iLift는 최소한
0인치는 움직여야 한다. 2가지의 경우에 한계 등의 일부나 전체의 점등은 축이 초기화 되었음을
허
파라미터는 ‘am’ 옵션에서 설정한다. 자율적인
움
모드에서 사용자는 단지 스위치를 한번 누르면 되고 시스템은 자신이 미리 프로그램된 위치로
이동할 것이다. 자율적인 움직임 모드에서 8개까지 미리 프로그램된 목표 지점을 정의할 수 있다.
자율적인 움직임은 적용에 따라 스위치 사용을 요구할 수 있다. 자동 움직임은 단지 스위치가
눌러졌는지 아닌지를 이용한다. 일반적인 오픈 스위치는 이런 용도로 사용될 수 있고 허브 뒤에
위치한 7번과 10번 핀 컨넥터를 가로질러 연결되어야만 한다.
Trolley 시스템은 독립적인 조건이 만족되면 자율적으로 움직이게 만들 수 있다. 예를 들면,
시스템은 자율적인 행동을 할 수 있는 최소의 무게를 가질
m
자율적인 모드에서 다른 목표에서 선택 가능한 무게의 시스템 인식을 사용하는 것은 가능하다.
예를 들면, 시스템은 부품을 움직이는지 아닌지에 근거하여 2개의 목표 사
있
값을 설정할 수 있는 Autonomous motion pay부하 limit. 메뉴 라인에서 사용한다.
Autonomous ramp-down time 메뉴 라인은 사용자가 목표 지점에 가까울 때 시스템을 얼마나
빨리 감소할 수 있는지를 사용자 정의할 수 있게 한다.
Autonomous motion required 부하, Autonomous motion minimum required 부하와 Autonomous
ramp-down time등의 파라미터는 iLift가 연결되었을 때
Autonomous mode (Position :1, Velocity :2) = ? 메뉴 라인은 자율적인 모드에서 사용자가 위치
피드백과 속도 피드백중에 하나를 선택할 수 있게 한다. 위치 피드백을
정
부터 시스템이 입력을 받아들일 수 있게 한다. 그것에 의해 사용자가 의도하는 경로로 시스템을
조정할 수 있지만 목표의 정확성에는 결론적인 손실이 있다. 예를 들면 사용자가 컨베이어를 따라
움직이는 운송과 같이 목표를 움직이는 쪽으로 부품이나 툴을 움직인다면 목표가 정확히 설정되지
않은 곳에서는 주로 많이 상용된다. 이런 경우에 ‘목표’는 컨베이어를 따라 목표된 지점일
것이지만 사용자는 정확한 목표점으로부터 움직이는 위치까지를 잡기 위해 약간의 이탈을 필요로
할 수 있다. 고정된 목표의 경우엔 위치를 근거로 하는 것이 더 좋다.
Enable CAS deswing in bridge/runway direction option은 사용자가 자율적인 움직임동안
브리지/주행 방향에서 CAS가 흔들리는 것을 무시할지 않할지를 선택할
Enable CAS disturbance = ? choice 메뉴 라인에서 사용자는 추가적인 안전 특성을 활성화할 수
있다. 방해 감지가 사용 가능할 때 케이블 앵글 센서는 ‘on’이고 어떤 시작 값보다
감
있거나 시스템이 움직이는 경로가 와이어 로프가 편향될 수 있는 물체와 end effector가 충돌하게
하는 원인이 된다면 자율적인 움직임을 멈추는 것을 의미한다. 그 특성이 사용 가능할 때 다음
메뉴 라인 CAS disturbance detection limit [0.00 – 100.000]는 사용자가 시스템이 자율적인
움직임을 소실시킬 수 있는 와이어 로프의 편향된 값이 얼마인지 설정할 수 있도록 한다.
자율적인 모드에서 사용자는 8개의 목표 위치를 정의할 수 있다. 사용자는 독립적인 각각의 위치를
위한 최대 속도와 가속도를 지정할 수 있다. 추가로, 사용자는 목표 위치의 하나로 시스템
위
어떤 자율적인 움직임을 설정하기 위해 모든 축은 초기화되어야 한다. iTrolley 축의 경우
iTrolley는 레일 위의 마
1
보여준다. 목표 위치를 설정하기 위해서 브의 리셋 버튼을 누르거나 누르고 있고 2초 동안
트리거를 입력할 때 누르고 있는다. 시스템은 새로운 목표 위치가 받아들여 졌다는 것을 알리기
위해 2초 동안 허브 위의 노란 상태 등을 점등한다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 37 -
5.2.3 캘리브레이션 로드 셀 ‘cl’ 옵션을 선택하는 것은 사용자가 로드 셀을 캘리브레이션하게 한다. 단지 구되는 파라미터는
리브레이션 시간에 허브에 부착된 무게의 양이다. 입력된 캘리브레이션 무게는 허브,
게를 포함해야만 한다. 허브는 1.72Kg(3.8lbs)이고 후크는
요
캘
핸들(존재하면)와 후크의 무
0.45Kg(1lbs)이고 슬라이드 핸들은 약 0.95Kg(2.1lbs)이다. 사용자는 마지막 프롬프트에서 ‘n’을
입력해서 캘리브레시션 과정을 무시할 수 있다. 캘리브레이션 파라미터는 ‘sp’ 옵션에 의해
캘리브레이션 후에 저장될 수 있다.
5.2.4 케이블 앵글 센서 파라미터 케이블 앵글 센서(CAS) 제로 위치는 시스템이 리셋될 때마다 재캘리 된다. 이것은
스템을 표류하게 할 수 있는 오버헤드 레일 시스템의 경사각 때문에 증가될 수 있는 센서의
쉬는 동안 앵글에서 와이어 로프를 잡는 것은 CAS 제로
브레이션
시
앵글에서 변동을 조정한다. 시스템이
위치를 무의식적으로 옮길 수 있다. 이 조건을 막기위해서 리셋에서 시작 범위라 불리는 가상 CAS
범위는 엄격하다. 시작 범위는 사용자 환경이다. 이 값을 위한 좋은 선택은 데드밴드이다.
CAS 시작 범위를 설정하기 위해서는 다음 과정을 따른다.
5.2.5 현재 무게 허브에 부착된 무게는 측정되고 ‘cw’ 옵션 선택 후 컴퓨터에 표시될 수 있다.
5.2.6 데이터 로거 파라미터
데이터 로거는 iTrolley의 일반적인 사용동안 주기적으로 여러가지 라이프 사이클 데이터를
저장한다. 데이터는 실패 이력, 브리지와 주행 축에서 이동한 iTrolley의 총 거리, iTrolley가
사이클의 수를 저장한다. 경험했던 방향 변경의 수와 반-

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 38 -
5.2.7 데드맨 스위치 파라미터
rolley 시스템은 데드맨 스위치를 가지고 설치될 수 있다. 데드맨 스위치는 사용자가 활성화된
재하도록 요구하는 순간적인 스위치이다. 사용자가 스위치를
T
상태를 유지하기 위해 계속 존
놓는다면 시스템은 멈출 것이다. 일반적으로 열리거나 닫힌 접촉 스위치는 위험 평가 적용에
근거하여 사용될 수 있다. 스위치는 허브 뒤에 위치한 7번과 9번 핀을 경유하여 연결되어야만
한다. 데드맨 스위치 특성이 사용 가능하면 시스템은 버튼이 눌러졌을 때 희망하는 속도로
기울기가 올라가고 해제되었을 때 제로 스피드로 기울기가 내려갈 것이다. 기울기가 올라가거나
떨어지는 시간은 구성가능하다. 리셋에서 데드맨 스위치를 누르거나 스위치의 잘못된 타입을
선택하는 것은 시스템을 잘못되게 할 수 있다.
5.2.8 출력 수정
출력 수정은 ‘do’ 옵션을 선택한 후 가능하다. 이것은 시스템의 문제해결에서 Stanley Cobotic
있다. 이 옵션이 가능하게 하는 것은 시스템이 시리얼 인터페이스를 통하여 사람에게 유용할 수
정보를 수정하는 것을 보여줄 수 있다.
5.2.9 에러 상태
시스템을 멈추게 하는 마지막 에러는 ‘er’ 옵션을 선택한 후 표시될 수 있다. 시스템이 허브 위의
의해 멈춰진다면 시스템은 No Fault를 출력할 것이다. 이 정보는 iTrolley에서 스톱 버튼을 누름에
문제 해결을 할 때 유용하다. 이 메뉴 선택은 가능한 에러 코드와 설명을 표시한다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 39 -
5.2.10 비활성 타임아웃
시스템은 비활성화 기간 후에 자동으로 DOWN(빨간 LED on) 상태로 가도록 구성할 수 있다.
시간의 양은 분으로 정의된다. 재시작을 위해 허브 위의 녹색 버튼을 누른다.
5.2.11 iLift 메뉴
iLift가 iTrolley 시스템의 일부로 설치된다면 ‘lm’ 명령은 iLift 메뉴로 변경된다.
5.2.12 오버로드 파라미터
는 ‘op’ 옵션을 선택한 후 설정한다. 이런 쓰레스홀드가 몇초이상 오버로드 쓰레스홀드 무게
초과되면 시스템은 실패할 것이고 오버로드 에러 코드를 보여줄 것이다. 부품은 자주 기구가
손상받는 것을 방지하기 위한 기구를 가지고 있는 곳에서 사용될 수 있다.
5.2.13 패스워드
패스워드 입력은 Stanley Cobotic 사람이 사용자 인터페이스에서 추가적인 옵션에 접근하게 한다.
파라미터
과 축)를 위한 정의를
필요로 한다. 버튼의 인식은 버튼이 제어하는 축의 운동 방향을 결정한다. 제어된 방향은 버튼이
나 주행)이 움직이는 것을 결정한다.
5.2.14 비례적인 X/Y 버튼 비례적인 버튼은 허브 위의 아날로그 입력에 부착될 수 있고 브리지나 주행 축을 따라 iTrolley를
제어하는데 사용된다. 그것의 행동은 ‘pb’ 옵션을 선택한 후 구성된다. 2개의 버튼까지 동시에
연결될 수 있다. 2개의 파라미터는 각 비례적인 스위치(: 제어아래의 인식
눌렸을 때 축(브리지
5.2.15 프로파일 설정
8개의 사용자 프로파일이 사용 가능하다. 사용자 프로파일은 다른 사용자가 그들의 선호도에 맞게
시스템을 조정할 수 있다. 각 프로파일에서 파라미터 셋은 속도와 시스템의 민감도에 영향을 준다.
사용자는 시스템이 멈추었을 때 사용자 프로파일 선택 버튼을 사용하여 활성적인 프로파일을
연결할 수 있다. 빨간 상태 등은 활성 사용자 프로파일을 연결하기위해 점등되어 있다.
각 프로파일은 케이블 앵글 센서(CAS) 민감도, CAS 데드밴드, 가능한 가상 운동량과 최대
속도등의 파라미터를 담고 있다. 만약 비례적인 버튼이 사용 가능하면 버튼 데드밴드와 최대 지배
각 프로파일을 위해 구성될 수 있다. 브리지와 주행 Trolley는 동일하거나 각각 구성된
설정할 수 있다.
AS 데드밴드는 trolley가 움직이기 시작할 때의 최소 앵글을 설정한다. 데드밴드는 환경적인
payload를 계속 움직이고자 요구되는 케이블 앵글을
인다. 즉, 사용자는 그가 원하는 속도에서 payload를 움직일 수 있고 동일한 방향에서 동일한
대 속도는 시스템이 움직일 수 있는 최대 속도를 설정한다. 시스템에 부과된 2.0m/s의 절대적인
적인
속도는
파라미터 셋을 사용하여
CAS 민감도는 케이블 앵글과 iTrolley의 속도 사이의 관계를 결정한다. CAS 민감도의 증가는
시스템이 주어진 케이블 앵글보다 더 빨리 움직이는 것을 의미한다.
C
소음과 레벨 조건으로 부터의 벗어남이 표류를 야기시키지 않도록 한다.
가상 운동량은 특히 긴 거리에서 무거운 payload 매체(대략 250lbs 이상)을 움직일 때 유용하다.
이것은 사이클 중간에 희망하는 속도에서
줄
속도를 유지하는 것이 어려운 것처럼 계속 누름 상태를 유지하지 않는다.
최

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 40 -
로파일을 대체한 후 파라미터를 저장하는 것을 기억한다.
한계가 있고 그래서 이 값보다 높게 프로파일 한계를 설정할 수 없다.
프
5.2.16 시스템 배열
iTrolley 시스템은 한 개 이상의 Trolley를 포함한다. 추가로 각 Trolley는 2개의 방법중 한 개로
배열될 수 있다.: 앞쪽이나 반대쪽을 바라봄. 더욱이 케이블 앵글 센서는 브리지에 수평이나
수직으로 배열될 수 있다. 주행 Trolley가 하나 이상이면 현재 주행 마그넷은 2개의 레일중 하나
위에 설치될 수 있다. 이런 설정은 ‘sc’ 옵션을 통하여 구성될 수 있다.
경고 : Stanley Cobotic 사람이나 그의 대리인은 초기 시스템 설치동안 ‘sc’ 옵션을 사
용한다. 이 값을 변경할 이유가 없다면 한번 설정한다. Trolley 방향이 구성되었을 때 조심해야 한다. 드라이브 롤러를 떼어 놓고 와이어 로프가 편향되었을 동안 드라이브 롤러의 회전 방향을 관찰하여 올바른 운영을 검사한다. 올바르지 않게
Trolley 방향은 사람이나 시스템에 손상을 야기시킬 수 있는 주행 상태를
구성된
야기시킨다.
5.2.17 파라미터 저장 사용자 인터페이스를 통하여 저장된 모든 파라미터는 ‘sp’ 옵션을 선택하여 비일시적인 메모리에
저장된다. 사용자 인터페이스를 통하여 설정을 변경한 후에 ‘sp’ 옵션을 사용하여 저장해야만 하며
그렇지 않으면 전원이 순환될 때 소실된다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 41 -
5.2.18 소프트웨어 버전 iTrolley 소프트웨어 버전은 ‘sv’ 옵션을 선택하여 접근 가능하다. 이런 정보는 Stanley Cobotic과
통신할 때 유용하다.
5.2.19 터보 파라미터 터보 모드는 사용자가 무거운 payload를 더 쉽게 움직이게 디자인된다.
터보 모드는 희망하는 이동 방향에서 처음 밀어 입력되고 시스템은 터보 버튼(데드맨 버튼)을 눌러
그 방향에서 움직이기 시작한다. 터보 조정은 버튼이 눌려진 동안 현재 이동하는 방향에 수직
방향에서 밀어 수행된다.
보 모드를 조정하는 2개의 파라미터(스티어링 게인과 데드밴드)가 있다. 스티어링 게인은 CAS
블 앵글을 근거로 하여 시스템이 방향을 얼마나 빨리 바꿀 수 있는지를
의도되지 않은 작은 케이블 움직임에 반응하지 않는
것을 확신한다. 운영자가 부하를 누름으로 인해 발생하는 불안정한 조정(매우 빠른 조정)이
관찰되면 스티어링 게인은 감소해야만 한다. 일반적으로 터보 조정은 운영자가 부드럽고
조정 명령을 적용할 때 가장 좋다. 터보 모드를 입력하기 위해서는
하기 때문에 필수적이다.
튼은 데드맨 스 치 버튼에 의해 사용된 동일한 핀 7번과 9번에 연결된다. 터보와 데드맨
수 없음에 주의한다.
보와 관련된 파라미터 리스트와 간략한 설명이 있다.
터
민감도와 유사하다. 케이
제어한다. 데드밴드는 CAS 데드밴드와 유사하다. 케이블 앵글은 시스템이 회전하기 시작한
데드밴드 값을 초과해야 한다. 시스템이 터보 모드에서 의도하지 않은 조정을 보여주면 데드밴드는
증가되어야만 한다. 이것은 운영자에 의해
상대적으로 긴(2 ~ 3초)
케이블은 편향되어야 하고 시스템은 터보 버튼이 눌리기 전에 시작되어야 한다. 케이블 편향은
초기 진행 방향을 정의
터보 버 위
스위치를 동시에 사용할
터
5.2.20 단위 배열 시스템은 미터나 영국 단위를 사용하는 사용자 인터페이스를 통하여 여러가지 파라미터 셋을 위한
단위를 표시한다. 이 옵션은 희망하는 표시 단위를 선택한다.
5.2.21 가상 한계 배열 전형적으로 iTrolley 컨넥터 브라켓 위의 버튼을 사용하여 구성된 가상 멈춤은 사용자 인터페이스
’ 옵션을 선택하여 설정할 수 있다. iTrolley 가상 멈춤 시스템은 이 옵션이 작동하게 하기
으로 초기화되어야 한다. 가상 멈춤은
iTrolley의 현재 위치에서 설정된다. 자세한 사항은 섹션 1.3.2를 참조한다. 이런 특성이 사용
가능하면 단정적인 가상 멈춤 감소 파라미터는 구성될 수 있다. 사용자는 iTrolley가 가상 멈춤
위치에 접근할 때 감소율을 구성하기 위해 이런 특성과 파라미터를 사용할 수 있다. 가상 멈춤의
어려움은 iTrolley가 가상 멈춤 위치를 얼마나 어렵게 치는지를 사용자가 선택할 수 있도록 한다.
‘vl
위하여 iTrolley가 레일 마그넷을 지나 움직이게 함

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 42 -
Chapter 6: 보전6.1 iTrolley 소프트웨어 업그레이드
6.1.1 설명 이런 특성은 윈도우 컴퓨터나 하이퍼 터미널과 같은 터미널 응용을 이용하는 S-232 시리얼
tanley Cobotics 장비로 소프트웨어를 업그레이드 할 수 있는 사용자나
시스템에서 각 장치는 각각 업그레이드 되어질 필요성이 있다. iTrolley 소프트웨어를
업그레이드하기 위해서는 마스터와 슬레이브가 업그레이드되어야 한다. 다른 것들은 마스터만
업그레이드 되어지면 된다. 윈도우 하이퍼 터미널과 같은 시리얼 포트를 통해 연결되어질 수 있는
터미널 프로그램이 사용된다. 하이퍼 터미널은 액세서리나 통신아래에서 발견된다. 다음의 설정을
해 터미널 프로그램을 설정한다.
R
인터페이스를 사용하여 S
Stanley Cobotics 사람이 사용가능하다.
6.1.2 물리적인 연결
허브 밑에 있는 RS-232 인터페이스는 케이블 앵글 센서 위의 정션 박스에 직접 연결된 장치를
업그레이드 하는데 사용될 수 있다. 이 장치는 iTrolley 컨넥터 브라켓 위의 28핀 컨넥터에 연결된
Stanley Cobotic에서 공급된 케이블을 통해 업그레이드 되어지는 마스터 iTrolley나 iLift 슬레이브
iTrolley중 하나이다. 이 케이블은 토한 마스터 iTrolley를 업그레이드하는데 사용될 수 있다.
위
허브에 연결되는 케이블 연결은 숫놈 컨넥터 DB9이다. 대부분의 PC 연결을 위해 요구되는
케이블은 DB9 컨넥터이다. 케이블 안에 Null 모뎀은 요구되지 않는다.
6.1.3 업그레이드 과정
포트에 요구되는 Stanley Cobotic 장치를 연결한 후 전원을 끄고 다시 켜서 윈도우 컴퓨터 시리얼
터미널 프로그램을 관찰한다. 약 50초이내에 “Cobotic>” 프롬프트가 나타날 것이다. 이 지점에서
사용자는 업그레이드 모드를 호출하기 위해 “Enter” 키를 누르기까지 약 3초를 가진다. 아래의
메뉴가 표시될 것이디.
업그레이드 과정은 ‘u’옵션을 선택하면 초기화되어진다. 이 지점에서 아래의 지침 설정이 표시될
것이다.
업그레이드 파일은 Stanley Cobotic에서 공급된다. 파일 이름은 upgrade.tar.gz이다. 실제적인
업그레이드 과정은 시스템이 재부팅된 후 실행된다. 업그레이드는 ‘r’ 옵션을 선택한 후 다시
업그레이드 모드를 선택하면 제거된다.
6.2 iTrolley 보전iTrolley의 규칙적인 보전은 레일, 케이블, 휠이나 롤러의 마모가 있는지를 매일 육안 검사해야
한다. iTrolley는 단지 2개의 소모성자재, 드라이브 롤러와 사이드 가이드 롤러/휠을 가지고
디자인된다. 드라이브 롤러는 불규칙한 마모나 스크래치가 나타나면 가능한 빨리 교체해야 한다.
스크래치 마크는 레일의 결함을 표시한다.
경고 : 보전이 필요할 때마다 우선 시스템을 정지시키는 전원을 코일 케이블 연결하
거나 연결을 해제한다. 그렇지 않으면 허브에 손상을 줄 수 있다.
iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 43 -
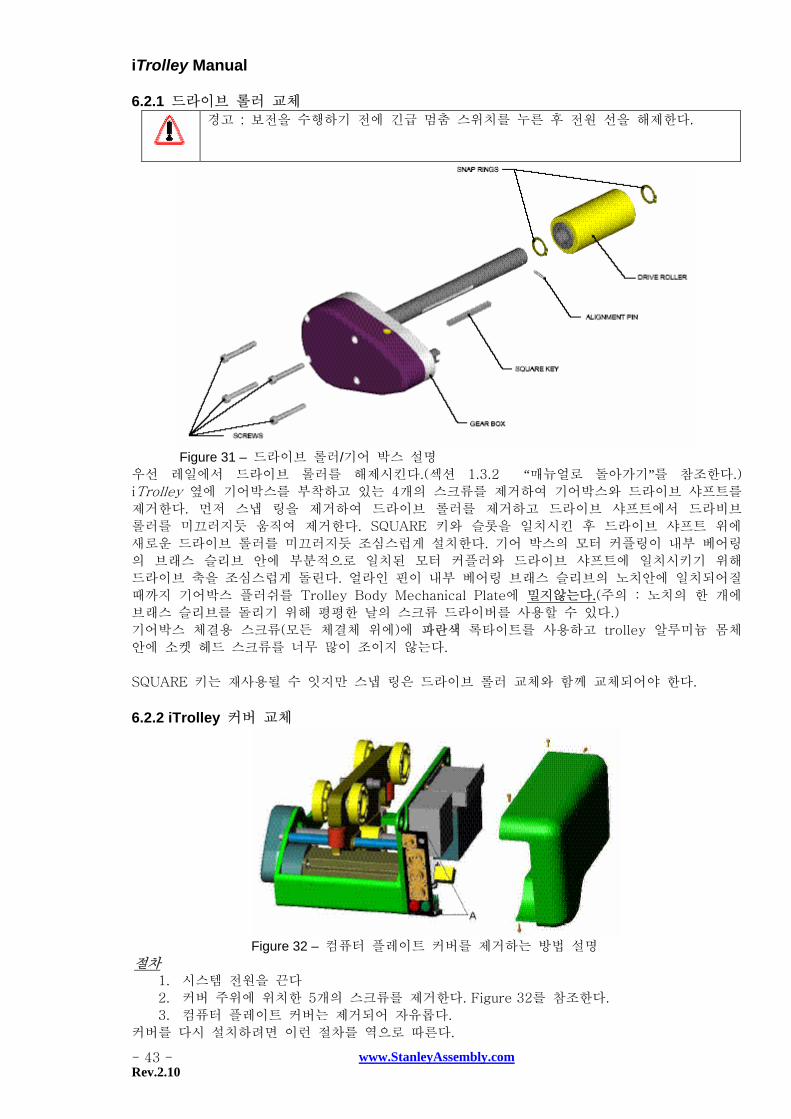
6.2.1 드라이브 롤러 교체
경고 : 보전을 수행하기 전에 긴급 멈춤 스위치를 누른 후 전원 선을 해제한다.
Figure 31 –
선 레일에서 드라이브 롤러를 해제시킨다.(섹션 1.3.2 “매뉴얼로 돌아가기”를 참조한다.)
착하고 있는 4개의 스크류를 제거하여 기어박스와 드라이브 샤프트를
라비브
롤러를 미끄 위에
새로운 드 이브 롤러를 미끄러지듯 조심스럽게 설치한다. 기어 박스의 모터 커플링이 내부 베어링
의 브래스 슬리브 안에 부분적으로 일치된 모터 커플러와 드라이브 샤프트에 일치시키기 위해
드라이브 축을 조심스럽게 돌린다. 얼라인 핀이 내부 베어링 브래스 슬리브의 노치안에 일치되어질
때까지 기어박스 플러쉬를 Trolley Body Mechanical Plate에 밀지않는다.
드라이브 롤러/기어 박스 설명
우
iTrolley 옆에 기어박스를 부
제거한다. 먼 저 스냅 링을 제거하여 드라이브 롤러를 제거하고 드라이브 샤프트에서 드
러지듯 움직여 제거한다. SQUARE 키와 슬롯을 일치시킨 후 드라이브 샤프트
라
(주의 : 노치의 한 개에
브래스 슬리브를 돌리기 위해 평평한 날의 스크류 드라이버를 사용할 수 있다.)
기어박스 체결용 스크류(모든 체결체 위에)에 파란색 록타이트를 사용하고 trolley 알루미늄 몸체
안에 소켓 헤드 스크류를 너무 많이 조이지 않는다.
SQUARE 키는 재사용될 수 잇지만 스냅 링은 드라이브 롤러 교체와 함께 교체되어야 한다.
6.2.2 iTrolley 커버 교체
Figure 32 – 컴퓨터 플레이트 커버를 제거하는 방법 설명
절차 1. 시스템 전원을 끈다
2. 커버 주위에 위치한 5개의 스크류를 제거한다. Figure 32를 참조한다.
3. 컴퓨터 플레이트 커버는 제거되어 자유롭다.
커버를 다시 설치하려면 이런 절차를 역으로 따른다.

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 44 -
주의 : 일반적으로 Figure 32의 디자인된
A 지점에 커버를 맞추는 것은 가장 쉽다. 그리고 나머지 모서리를 맞춘다.
6.2.3 모터 증폭기 교체
Figure 33 – 모터 증폭기 제거 방법 설명
절차 Chapter 조한다.
레이트 커버를 제거한다.
증폭기
클램핑 스크 팁 스크류드라이버를 사용한다. 스크류는 증폭기
정면의 작은 억세스 홀을 통하여 접근할 수 있다.
증폭기 왼쪽 하단에 위치한 녹색 어스용 스크류를 제거한다.
의 스크류를 풀고 증폭기를 잡고 있는 오른쪽의 2개의 스크류를
제거한다.
6. 증폭기는 제거되어 자유롭다.
새로운 모터 증폭기를 설치하려면 이런 절차를 역으로 따른다. 모터 증폭기의 스크류 터미널에
모터 와이어를 설치할 때 주의한다. 리테이닝 스크류에 의해 확실히 클램프된 모터 리드를
재설치할 때 주의한다.
8 : 시스템 개요를 참
1. 시스템 전원을 끈다.
2. 섹션 6.2.2 iTrolley 커버 교체처럼 컴퓨터 플
3. 전원과 제어 신호 컨넥터를 해제한다.
바닥에 위치한 모터 리드(왼쪽에서 오른쪽까지 검정색, 하얀색과 빨간색)를 잡고 있는
류를 풀기위해서 작은 일반적인
4.
5. 증폭기 왼쪽의 2개
경고 : 공급된 스크류나 록킹 패치나 록타이트가 있는 스크류만 사용한다.
6.2.4 Trolley 모터 교체
절차 1. 시스템
섹션 6.2.2 iTrolley 커버 교체처럼 컴퓨터 플레이트 커버를 제거한다.
치한 ty-wrap 앵커에 모터 와이어를 고정하는 ty-wrap을
터 주의깊게 묶지않는다.)
Board에서 분리한다.(오른쪽,
한다. 플러그가 록 너트를 관통하여 지나가거나 컴퓨터 홀을 지나가도록
게 플러그에서 와이어를 조심스럽게 와이어를 넓힌다.
6. iTrolley Mechanical 플레이트를 가진 모터의 녹색 플라이휠 케이스를 부착한 기어박스
전원을 끈다.
2.
3. 컴퓨터 플레이트의 바깥쪽에 위
자른다.
4. 컴퓨터 플레이트 안쪽의 록 너트를 푼다.
5. 2개의 케이블을 해제한다.
a) PWM 모터 증폭기의 스크류 터미널 P2로부터 빨간색 모터 전원 케이블의 2개
와이어(왼쪽에서 오른쪽으로 – 검정색, 하얀색과 빨간색) (주의 : 빨간 케이블의
경로와 컴퓨터 플레이트 및 조립하는 너트로부
b) 2번째 케이블을 따르고 PC104 스택 Node Expansion
스택에서 2번째 보드) 플러그에서 케이블을 당기고 플러그 위의 키 위치에
주의
플러그의 한쪽에 수평하
근처의 5개의 소켓 헤드 스크류를 제거한다. 주의 : 마지막 2개의 스크류를 풀러 모터를

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 45 -
자유롭게 하기위해 iTrolley Mechanical 플레이트에서 모터를
1/2
8. 특별한 경우엔 위의 역순으로 모터를 설치한다.
a) 모터 커플링을 일치시킨다.
b) 모터 와이어 포인트를 위쪽으로 이동한다.
검은색 케이블 컨넥터를 이동하고 빨간색 케이블을 컴퓨터 플레이트와
록 너트 피팅을 통하여 이동한다.
트에 피팅을 부착하고 그것에 잘 정돈하기 위해 컴퓨터 플레이트의
빨간색 케이블을 조심스럽게 라우팅한다.
고정하기 위한 3개의 와이어. 주의 : 터미널
삽입하고 조이기 전에 완전히 CCW를 여는지 확인한다.
i)
6.2.5 전 공급
지지한다.
7. 기어박스에서 커플링을
”를 띄운다.
c) 조심스럽게
d) 컴퓨터 플레이
앵커에 모터 와이어를 ty-wrap한다.
e) 검은색 컨넥터 키를 Node Expansion Board의 중심으로 이동한다.
f) 전처럼
g) PWM 모터 증폭기의 P2 터미널을
스크류가 와이어를
h) 원래 발견된 것처럼 내부적으로 ty-wrap 케이블한다.
커버를 교체하기 전에 전원을 올리고 테스트한다.
원 기 교체
re 34 – 전원 공급기 제거 방법 설명 Figu
절차 Chapter 시스
1. 시스템
2. 섹션 6.2
3. 전원 공 쪽 대부분 컨넥터)
4. 전원 공 대부분 컨넥터)
5. 전원 공급기를 지지하고 있는 2개의 스크류를 제거한다.
되어 자유롭다.
새로운 전원 공급기를 설치하기 위해서는 이런 지침의 역순을 따른다.
8 : 템 개요를 참조한다.
전원을 끈다.
.2 iTrolley 커버 교체처럼 컴퓨터 플레이트 커버를 제거한다.
급기에서 PC/104 스택으로 가는 컨넥터를 분리한다.(왼
급기에 전원을 입력하는 컨넥터를 분리한다.(오른쪽
6. 전원 공급기는 제거
경고 : 공급된 스크류나 록킹 패치나 록타이트가 있는 스크류만 사용한다.
6.2.6 코일 코드 교체
경고 : 전원이 공급되는 동안 코일 코드 케이블을 연결하거나 분리하지 않는다.그렇
지 않으면 허브에 손상을 줄 수 있다.
절차 1. 시스템 전원을 끈다.
2. 허브의 코일 코드 케이블 아래 끝단과 CAS 정션 박스이나 iLift의 컨넥터 브라켓의 위
끝단을 분리한다.
3. 허브의 90도 피팅으로부터 노랑 공기 라인을 분리한다. 꼭대기에

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 46 -
케이블 앵글 센서나 iLift의 바닥에 케이블 클램프로부터 코일 코드 케이블을 풀어 놓는다.
케이블을 푼다.
자유롭다.
새로운 에 여러가지 각도로
위치
6.2버튼 위치한다.
절차
4.
5. 와이어 로프 주위의 코일 코드
6. 코일 코드는 제거되어
코일 코드를 설치하기 위해서 불필요한 억제나 신호 케이블 컨넥터
시킴없이 이런 지침의 역순을 따른다.
.7 버튼 LED/렌즈 교체 LED/렌즈는 iTrolley의 전원 입력쪽에
1. 시스템 전원을 끈다.
2. 푸쉬 버튼의 렌즈를 떼내기 위해 작은 평평한 스크류 드라이버를 이용한다.
하기 위해 니들 노즈 플라이어를 사용한다.
램프
방향에서
5. 푸쉬 버튼 와 렌 탭을 일치시킨 러 입한다.
6 브 보전
3. LED 램프를 제거
4. 키를 푸쉬 버튼 키와 일치시켜 LED 램프를 교체한다.(주의 : LED 램프는 오직 한
고정된다.)
키 즈 후 눌 삽
.3 허
허브
육안 검 이어 로프의 꼬임은 케이블 앵글 센서를 통하여 지나는 꼬임과 같은
예상 체될 수 있다. 허브내에
서비
6.3.
다. 고리를 지나 대략 3인치를 남기고 고리 주위에
이어 로프를 라우팅한다. 최소한 끝단을 고정하기 위해 배럴 클립 1개나 와이어 클립 2개를
어져 있는지를 확인한다. 끝단은 희망하지 않는 전기적인 연결을
다.
에서 수행되어지는 일반적인 보전은 케이블, 마운팅 하드웨어 및 와이어 로프의 마모를 위한
사로 구성된다. 와
치 못한 움직임을 야기시킬 수 있다. 와이어 로프와 후크는 모두 교
스 가능한 부품은 없다.
1 와이어 로프 교체 와이어 로프와 허브로부터 하드웨어를 제거하고 와이어 로프를 제거한다. 로프를 재설치하기
위해서 허브 상단의 브라켓에 고리를 놓는
와
사용하고 너트가 끝단에서 떨
야기시킬 수 있기 때문에 허브에 접촉되지 않아야만 한
경고 : 와이어 로프 끝단은 허브의 다른 부품이나 코일 코드 컨넥터와 접촉되지 않기 위해 절단되어야 한다. 그렇지 않으면 파손이나 상해를 일으키는 시스템의 불규
야기할 수 있다. 칙한 움직임을
이어 로프 피팅을 사용한다. 그렇지 않으면 상해나 죽음을 야기하는 와이어 로프
의 실패를 야
경고 : 꼭 Stanley Cobotics에서 승인된 와이어 로프를 위해 사용되어지는 크기의 와
기할 수 있다.
경고 : 꼭 Stanley Cobotics에서 승인된 고리나 비전도체 고리를 사용한다. 그렇지 않
으면 상해나 죽음을 야기하는 와이어 로프의 실패를 야기할 수 있다.
6.3.2 후크 교체 후크를 제거하기 위해 우선 Figure 14와 15에서 보여지는 것처럼 허브에서 가는 로드가 후크
인터페이스에 들어가는 곳 위에 얼라인 핀을 제거한다. 후크를 푼다. 공장에서는 후크에 얼라인 핀
은 없다. 사용자는 필드에서 홀을 뚫어야 한다. 지침과 얼라인 조건을 위해 섹션 2.2.4 절차 1과
서 얼라인 홀을 뚫기위해 허브로부터 후크 인터페이스를 제거하는 것은
홀
절차 2를 참조한다. 후크에
요구되지 않지만 사용자를 위해서는 편리하다. 후크를 교체하기 위해 얼라인 핀 홀이 가는 로드
홀과 일치할 때 까지 조이고 얼라인 핀을 교체한다.
경고 : 얼라인 핀은 일상 운영동안 후크가 풀리는 것을 방지하기 위해 교체되어야 한
다. 그렇지 않으면 상해나 죽음을 야기하는 와이어 로프의 실패를 야기할 수 있
다.
6.4 와이어 로프 교체 절차이 절차는 iTrol 는 시스템으로 만들어진다. ley와 함께 에어 발란서를 포함하

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 47 -
사용하는 동
교체가 요구된다
손상을 방지하기 때 적당한 절차를 지키는 것이 중요하다. Stanley
obotic 허브는 와이어 로프가 에어 발란스 안에서 수축될 때 코일 케이블 조립이 케이블 앵글
센서에서 운 y
Cobotic 사람이 당히 와이어
로프에 부착되어 있는지를 확인하고 존재할 수 있는 최소의 lift 요구를 만족하는지 확인한다.
음의 절차는 와이어 로프가 교체될 때 동일한 요구가 만족되는지를 확인할 것이다.
안 에어 발란서의 와이어 로프는 마모될 수 있거나 파손되어 질 수 있다. 그러면
. 허브, 코일 케이블 조립과 케이블 앵글 센서와 같은 Stanley Cobotic 부품의
위해 와이어 로프를 교체할
C
영될 수 있는 높이에서 와이어 로프가 부착되어야 한다. 초기 설치동안 Stanle
나 그들을 대리하는 사람은 허브가 어떤 손상을 방지하기 위해 적
다
와이어 로프 위에 허브의 적당한 교체를 보증하기 위해 사용되어질 수 있는 2가지 방법이 있다.
한가지 방법은 에어 발란서에서 행해질 때 와이어 로프가 손상되지 않을 때 사용될 것이다. 그러나
때로는 와이어 로프가 에어 발란서에서 제거되기 위해 절단되어야만 풀릴 수 있다. 그런 경우에
두번째 방법은 사용된다. 가능하면 두가지 방법은 정확한 위치에서 크로스 체크하기 위해 사용된다.
경고 : 로프에 존재할 수 있는 마모로부터 상해를 막기위해 무거운 장갑을 사용한다.
제거 절차 1. 가능한 한 낮게 움직이도록 하는 허브에 설치된 end effect나 툴을 제거한다.
있는 가장 낮은 곳의
로프 위에 지울 수 없는 마크를 한다. 어떤 와이어 로프는 내부에 기름이 발라져 있고
게 측정하고
거리를 기록한다.
않는
5. 설치시
미끄럽게 움직인다.
6. 손으로 케이블 앵글 센서를 통하여 와이어 로프를 뒤쪽으로 당기고 그것이 라우팅 될 수
풀리나 터널과 같은 장애물을 자유롭게한다.
한다.
회수되어질 수 있다면 새로운 것에 놓고 오래된 와이어
마
마크
로프
수 있
설치 절차
2. 표시된 허브 배치 방법
a. 방법 1 – Stanley Cobotics 허브의 꼭대기에 회전축을 통해 갈수
펠트 팁 펜이나 매직 마커를 가지고 마킹을 하기 어려우므로 와이어 로프의 표면에서
쉽게 마크가 지워지지 않음을 확인한다. 또한, 와이어 로프를 잡아 당길 때 테이프가
제거될 것이기 때문에 이 점이 작용하지 않게 마크를 하기 위해 테이프를 사용한다.
b. 방법 2 – 에어 발란서 콘트롤을 사용하여 낮게 가는 한 허브를 낮춘다. 허브가
상대적으로 가볍기 때문에 에어 발란서에서 완전히 당겨진 것을 확인하기 위해 때때로
와이어 로프를 당길 필요가 있다. 로프에 존재할 수 있는 어떤 마모로부터 상해를
방지하기 위해 무거운 장갑을 사용한다. 허브의 상단과 케이블 앵글 센서, 오버헤드
레일이나 빔, 평평한 바닥과 같은 고정된 지점과의 거리를 조심스럽
3. 허브가 추락하지 않도록 지지되는 동안 허브 상단의 회전축 위에 배럴 모양의 와이어 로프
클램프를 완전히 푼다.(설치는 U-모양의 와이어 로프 클램프를 가질 수 있다.) 허브로부터
이 단계를 수행하기 위해 코일 케이블을 분리할 필요는 없다.
4. 회전축을 통하여 와이어 로프의 자유로운 끝단을 뒤쪽으로 당기고 떨어지거나 손상받지
표면에 허브를 놓는다.
배럴 모양의 와이어 로프 클램프가 사용되면 와이어 로프에서 그것을 완전히
있는
7. 에어 발란서 제조업체의 추천된 절차를 따르고 발란서에서 와이어 로프를 제거
8. 와이어 로프가 하나의 조각에서
로프는 사이드에 놓는다. 방법 1을 따르면 오래된 와이어 로프처럼 형철의 끝단으로부터
크가 동일한 위치에 있다는 것을 확인하기 위해 새로운 와이어 로프를 위해 절차 2에서
를 오래된 와이어 로프로 이동한다. 종종 허브 회전축의 부싱 주위에 구부러진 와이어
에 뚜렷한 변형이 있다. 이것은 당신이 빨리 마크를 오래된 와이어 로프위로 위치시킬
도록 도와준다.
1. 발란
제거
2. 새로
센서 아래로 당긴다. 코일 케이블의 코일을 통하지 않고 중앙 아래로
3.
서에서 새로운 와이어 로프 설치는 제조사의 지침을 따른다. 오래된 와이어 로프를
하기 위해 발란서에서 제거된 케이블 가이드가 재설치 되었는지를 확인한다.
운 와이어 로프를 풀리 위로, 통로를 통하여 뒤쪽으로 다시 통과시키고 케이블 앵글
의 홀을 통하여
내려가는 것을 확인하여 코일 케이블 조립의 중앙을 통하여 와이어 로프를 아래로 당긴다.
Stanley Cobotic은 와이어 로프를 교체할 때 새로운 와이어 로프 클램프와 새로운 부싱을

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 48 -
용한다면 클램프의 스플릿
, 허브 회전축 위의 부싱을 교체하는 것은 회전축을 통하여
사용할 것을 추천한다. 배럴 모양의 와이어 로프 클램프를 사
너트가 와이어 로프의 자유 끝단과 더 가깝게 하기 위해 와이어 로프의 자유 끝단을 그것
위에서 미끄러지게 한다. 또한
그것을 놓은 후 부싱을 닫는 것을 확인한다.
남아 있는 동안 와이어 로프가 회전축과 전기적인 접촉을 유지하도록 요구한
다. 와이어 로프와 회전축 사이에 전기적
경고 : 시스템의 적당한 기능은 허브 몸체와 코일 케이블 컨넥터로부터 격리된 채로
인 연속성을 감속시킬 수 있거나 와이
고어 로프가 허브 몸체와 코일 케이블 컨넥터가 접촉하게 할 수 있는 U-자형
리나 걸쇄 또는 다른 장치를 추가하여 회전축에 와이어 로프를 부착하는 방법
을 바꾸지 않는다. 이런 지침을 따르지 않으면 손상이나 상해를 야기할 수 있
는 불규칙한 움직임을 초래할 수 있다. Error code 22는 이런 것이 발생하는 것
을 나타낸다.
4. 운 끝단을 회전축의 홀을 통하여 통과시키고 배럴 클램프를 사용하면
클램프의 바닥에 있는 스플릿 너트를 통하여 위쪽으로 뺀다. 회전축 근처에서 클램프를
러지게 하여 내리고 클램프를 충분히 잡도록 클램프 위에 쓰레드를 시작한다.
와이어 로프의 자유로
미끄
주의 : 회전축이 항상 자유롭게 회전하는지 너무 이른 케이블 마모가 발생하는지를 확인한다.
방법 1을 따른다면 와이어 로프에 만든 마크가 로프가 회전축에서 부싱 주위에 가는 가장
낮은 위치에 있는지를 확인한다. 와이어 로프 클램프를 할수 있는 한 부싱 근처로 내리고
5.
측정이 전과 되도록 하기 위해
와이
6. 발란서 제
또는 코일
7. 와이어 로
적절히 풀
확인한다.
8. 마지막 클
테이프를 로프 끝단을 고정하기 위해 돌렸는지를 확인하고 케이블 타이를
위한 적당한 크기인지 확인한다. 자유로운 끝단이 운영하는 동안 허브와 접촉하지
9. 어올림
거리
6.5 이블 앵글 센서 보전
제조자의 방향에서 묶는다. 방법 2의 단독이나 더블 체크를 사용한다면 발란서 제어를
사용하여 와이어 로프가 가능한 멀리 갈 수 있도록 풀어서 허브를 더욱 낮게 내린다. 다시
와이어 로프가 완전히 풀렸는지를 확인하기 위해 손으로 와이어 로프를 당긴다. 단계
#2에서 기록한 거리를 다시 확인한다. 측정에 영향을 두기 때문에 와이어 로프가 풀리
위에 적절히 안착되었는지 확인한다. 허브는 동일하게
어 로프 위에 설치되어야 한다.
어를 통하여 허브를 천천히 올린다. 와이어 로프는 케이블 앵글 센서와 허브
케이블 조립사이에서 손상을 줄 수 있는 충돌이 발생하기 전에 멈추어야 한다.
프 클램프가 적절히 묶였는지, 와이어 로프가 코일 케이블의 중앙을 통하여
리 위에 라우팅 되었는지, 허브의 꼭대기 회전축이 자유롭게 회전하는지를 다시
램프 위에 와이어 로프의 자유로운 끝단을 대략 6인치 정도 자르고 전기의
가지고 와이어
않아야만 한다. 와이어 로프가 발란서에서 완전히 오므라들었을 때 케이블 앵글 센서 안의
홀에 가지 않도록 충분히 짧아야 한다.
다른 장식이나 엔드 이펙트를 다시 부착하고 작업 과정이 만족하는 최소한의 들
요구를 확인한다.
케오직
부품이다
iTrolley
CAS 웨
M6x16 BHCS를
CAS 웨
3. 전히 삽입되었을 때 바닥의 하우징 위에 있어야만 한다.
CAS 웨어 인서트(part #2101-3006)는 케이블 앵글 센서 내부에서 사용자 서비스 가능
. 정션 박스는 사이드에 부착되고 케이블 앵글 센서와 허브로부터 iTrolley #1(마스터
)에 정보를 전달한다. Figure 35는 CAS 웨어 인서트를 설치하는 방법을 보여준다.
어 인서트를 CAS 코일 코드 가이드에서 제거하기 위해 Figure 35에 보여진 것처럼 4
푸르고 코일 코드 가이드로부터 웨어 인서트를 당긴다.
어 인서트를 설치하기 :
1. 웨어 인서트 위의 테이퍼를 관찰하고 2개의 홀 중 더 작은 것은 코일 코드 가이드에 먼저
삽입된다.
2. 웨어 인서트와 코일 코드 가이드 위의 마운팅 홀을 관찰한다. 마운팅 홀을 일치시킨다.
와이어 로프 웨어 인서트를 코일 코드 센터링 가이드 안에 손으로 눌러 설치한다. 웨어
인서트는 완
4. 4 M6x16 BHCS를 사용하여 와이어 로프 웨어 인서트를 코일 코드 가이드에 고정한다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 49 -
Figure 35 – CAS 마모 인서트(part # 2101-3006)를 교체하는 방법 설명

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 50 -
.6 시스템 예방 보전6iTrolley는 보전이나 수리 작업이 수행되기 전에 전원이 분리되어야 한다. 자격을 갖춘 사람은
기적으로 기능 확인과 육안 검사를 수행해야 한다.
영자는 작업을 시작하기 전에 테이블 2에 따라 검사를 수행해야 한다. Trolley는 운영상의
전과 신뢰성에 관련된 결함이 발견되면 즉시 서비스 되어져야 하고 매뉴얼 모드로 설정되어야
다.
able 2 – iTrolley 예방 보전 검사 일정
정
운
안
한
T

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 51 -
이런 예방 보전 권장은 주기적인 검사와 보전을 통하여 예상치 못한 파손과 문제점을 방지하기
위해 디자인 된다. 그러나, 특별한 검사 주기는 iTrolley 서비스 조건을 적용한다. 일상적인 보전
주기가 너무 길다고 판단되면 특별한 운영 조건이 적용되어야 한다.
경고 : 수리를 위해서는 오직 Stanley Cobotics에서 공급되거나 추천된 부품을 사용한
다.
6.7 시스템에 추천된 예비 부품아래는 iTrolley를 위해 Stanley Cobotics가 추천한 예비 부품 리스트이다. 설치된 시스템 구성에
근거한 가격 정보는 Stanley Cobotics 서비스 부서와 연락한다.
Table 3 – 추천된 예비 부품 리스트
경고 : Stanley Cobotics에 의해 승인되지 않은 예비 부품의 사용은 책임이나 보증 클
레임을 무효로 만든다.

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 52 -
hapter 7: 문제 해결C
했으면 더 많은 도움을 위해
tanley Cobotics 기술지원팀에 주저하지 말고 연락하세요.
7.1 가능한 증상
다음의 매트릭스는 가능한 증상, 원인들을 보여주고 발생할 수 있는 여러가지 어려운 점들을 위해
만들었다. 증상이 리스트되어 있지 않거나 문제를 해결하는데 실패
S
다음은 발 할 수 있는 증상들이다. 생
Table 4 – 문제 해결 테이블

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 53 -

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 54 -
7.2 시스템 에러 코드 테이블 다음은 허브의 LED 화면에 나타날 수 있는 에러 코드이다.
주의 : 전형적인 iTractor 시스템은 허브를 포함하지 않는다. 에러 정보 접근을 위해
서는 iTractor에 시리얼 통신을 설치해야 한다. 섹션 3.1에서 3.2.2를 참조한다.
주의 : iDevice는 iTrolley, iTractor, 또는 iLift를 의미한다는 것을 이해해야 한다.
표기법 : XXX-P# 플러그를 정의한다. XXX-J#는 저장소를 정의한다.
허브는 항상 직접 연결되어 있는 iDevice(즉, iTrolley, iLift)와 통신한다. 전통적으로
시스템에서 첫번째 장치로서 언급된다.

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 55 -

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 56 -

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 57 -

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
- 58 -

iTrolley Manual
www.StanleyAssembly.com Rev.2.10 - 59 -

iTrolley Manual
www.StanleyAssembly.com 60
Chapter 8: 시스템 개략도
Figure 36 – 전자 컨넥터 설명 부품에
Rev.2.10

iTrolley Manual
Figure 37 – 점퍼 설정
www.StanleyAssembly.com 61 Rev.2.10

iTrolley Manual
Figure 38 – PC/104 회로 카드 스택
www.StanleyAssembly.com 62
Rev.2.10

iTrolley Manual
Figure 39 – 전원 연결
www.StanleyAssembly.com 63 Rev.2.10

iTrolley Manual
Figure 40 – 상 연 전자 부품의 호 결
www.StanleyAssembly.com 64
Rev.2.10

iTrolley Manual
Figure 41 – 전자 부품의 상호 연결
www.StanleyAssembly.com 65 Rev.2.10

iTrolley Manual
Figure 42 – 전자 부품의 상호 연결
www.StanleyAssembly.com 66
Rev.2.10

iTrolley Manual
Figure 43 – 유틸리티 컨넥터 연결
www.StanleyAssembly.com 67 Rev.2.10

iTrolley Manual
Figure 4 o4 – iTrolley/iTract r 증폭기 설정
www.StanleyAssembly.com 68
Rev.2.10

i
R69
Trolley Manual
www.StanleyAssembly.com ev.2.10
iTrolley 기본 E-스톱 회로(EN954-1)
Figure 45 – iTrolley 기존 E-Stop 회로

i
Chapter 9:
Trolley Manual
www.StanleyAssembly.com
Rev.2.10
70
부품 도면

iTrolley Manual
www.StanleyAssembly.com 71 Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 72
Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 73 Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 74
Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 75 Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 76
Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 77 Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 78
Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 79 Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 80
Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 81 Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 82
Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 83 Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 84
Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 85 Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 86
Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 87 Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 88
Rev.2.10

iTrolley Manual
www.StanleyAssembly.com 89 Rev.2.10


iTrolley Manual
www.StanleyAssembly.com Rev.2.10 1
1 2
3
4
5

iTrolley Manual
www.StanleyAssembly.com
Rev.2.10
2
1





























