Embed Size (px)
Citation preview
Critical Design Review (CDR)
Έκδοση 1.0
ΟΜΑΔΑ: ElementarysaveSatellite 1
Περιεχόμενα
1.ΕΙΣΑΓΩΓΗ 1.1 Οργάνωση της ομάδας και ρόλοι των μελών 1.2 Στόχοι της αποστολής
2. ΠΕΡΙΓΡΑΦΗ ΤΟΥ CANSAT 2.1.1 Επισκόπηση αποστολής 2.1.2 Σχηματικό διάγραμμα 2.2.1 Μηχανολογικό/κατασκευαστικό σχέδιο 2.3.1 Ηλεκτρολογικό σχέδιο 2.4.1 Λογισμικό 2.5.1 Σύστημα ανάκτησης 2.6.1 Εξοπλισμός σταθμού βάσης
3. ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΤΟΥ PROJECT 3.1.1 Χρονικό πλάνο της προετοιμασίας του CanSat 3.2.1 Απαιτούμενοι πόροι 3.2.2 Κόστος 3.3.1 Εξωτερική υποστήριξη 3.4.1 Πλάνο δοκιμών 3.4.2 Δοκιμές για την πρωτεύουσα αποστολή
3.4.3 Δοκιμές για τη δευτερεύουσα αποστολή 3.5.1 Πλάνο Προώθησης 4.ΠΡΟΔΙΑΓΡΑΦΕΣ 4.1.1 Πίνακας Προδιαγραφών
ΚΑΤΑΣΤΑΣΗ ΤΟΥ PROJECT Το project της ομάδας μας συνεχίζετε ομαλά και με ρυθμό. Αυτά που έχουν πραγματοποιηθεί είναι:
● Οι αγορές των ηλεκτρονικών εξαρτημάτων και οι κολλήσεις τους. ● Ο τρισδιάστατος σχεδιασμός όλων των αισθητήρων αλλά και του μοτέρ στο AutoDesk
Fusion 360. ● Ο τρισδιάστατος σχεδιασμός του κελύφους (Can). ● Καθορισμός θέσεων των ηλεκτρονικών στοιχείων επάνω στις πλακέτες. ● Η υλοποίηση του Flowchart ● Η εξοικείωση στη γλώσσα προγραμματισμού του Arduino ● Ο κώδικας της πρωτεύουσας αποστολής ● Ο προσδιορισμός των υλικών του αλεξίπτωτου και η παραγγελία τους ● Δημιουργία ιστοσελίδων στο Facebook,Twitter και Instagram και η ενημέρωσή τους ● Δημιουργία βασικής ιστοσελίδας ● Κοινοποίηση του μηνιαίου βίντεο ● Εκπομπή και λήψη πακέτων στη συχνότητα που θα χρησιμοποιήσουμε ● Εύρεση της κεραίας που θα χρησιμοποιήσουμε ● Η κατασκευή του εξωτερικού περιβλήματος - κέλυφος ● Δοκιμές διάφορων αλεξιπτωτων ● Κατασκευή δύο διαφορετικών κεραιών ● Δοκιμές μόνο του ενός είδους κεραίας ● Συνέντευξη στο τηλεοπτικό κανάλι Ε ● Πείραμε μέρος και καταλάβαμε την πρώτη θέση στην ομαδική συνεργασία στο διαγωνισμό
“Γίνε και εσύ εισηγητής”στην μαθητική ημερίδα στο 17ο Συνέδριο Ελλήνων Φυσικών ● Συνομιλήσαμε με τον αστροναύτη της esa Christer Fuglesang ● Συναντήσαμε και πήραμε συμβουλές από τον υπεύθυνο ερευνών στο ερευνητήριο του
CERN κ. Μιχαήλ Κορατζίνο ● Βάλαμε σε λειτουργία όλα τα ηλεκτρονικά μας συστήματα ● Κάναμε επιτυχής επικοινωνία σταθμού βάσης και δορυφόρου σε απόσταση 1Km
Το πρόβλημα που αντιμετωπίσαμε αρχικά ήταν ότι αργήσαμε για κάποιους προσωπικούς λόγους να ξεκινήσουμε το project με αποτέλεσμα να βιαζόμασταν και να καθόμασταν περισσότερες ώρες από αυτές που υπολογίζαμε για να ολοκληρώσουμε κάποια κομμάτια της αποστολής μας. Επίσης πολλές φορές υπήρχε πρόβλημα στις επιπλέον συναντήσεις γιατί δεν μπορούσαν όλοι να
CanSat in Greece 2018 2 #launching_your_dreams
παρευρεθούν. Δεν προλάβαμε να κάνουμε δοκιμές με όλα τα ηλεκτρονικά συστήματα μέσα και ακυρώναμε συναντήσεις για δοκιμές λόγο κακών καιρικών συνθηκών. Δεν προλάβαμε να δοκιμάσουμε την Yagi κεραία που έχουμε ήδη κατασκευάσει και επίσης οι πλακέτες μας είναι σε εξέλιξη. Τέλος μέχρι σήμερα 25/3 περιμένουμε τις τρεις πλακέτες που έχουμε παραγγείλει(από τις αρχές Φεβρουαρίου) από Αμερική, πάνω στις οποίες θα υπάρχουν οι διάφοροι αισθητήρες του CanSat. Και αυτό είχε αποτέλεσμα να μην έχουμε κάνει τις τελικές μας δοκιμές ακόμα. Κάτι το οποίο μέχρι το διαγωνισμό στην Αθήνα θα έχει επιτευχθεί.
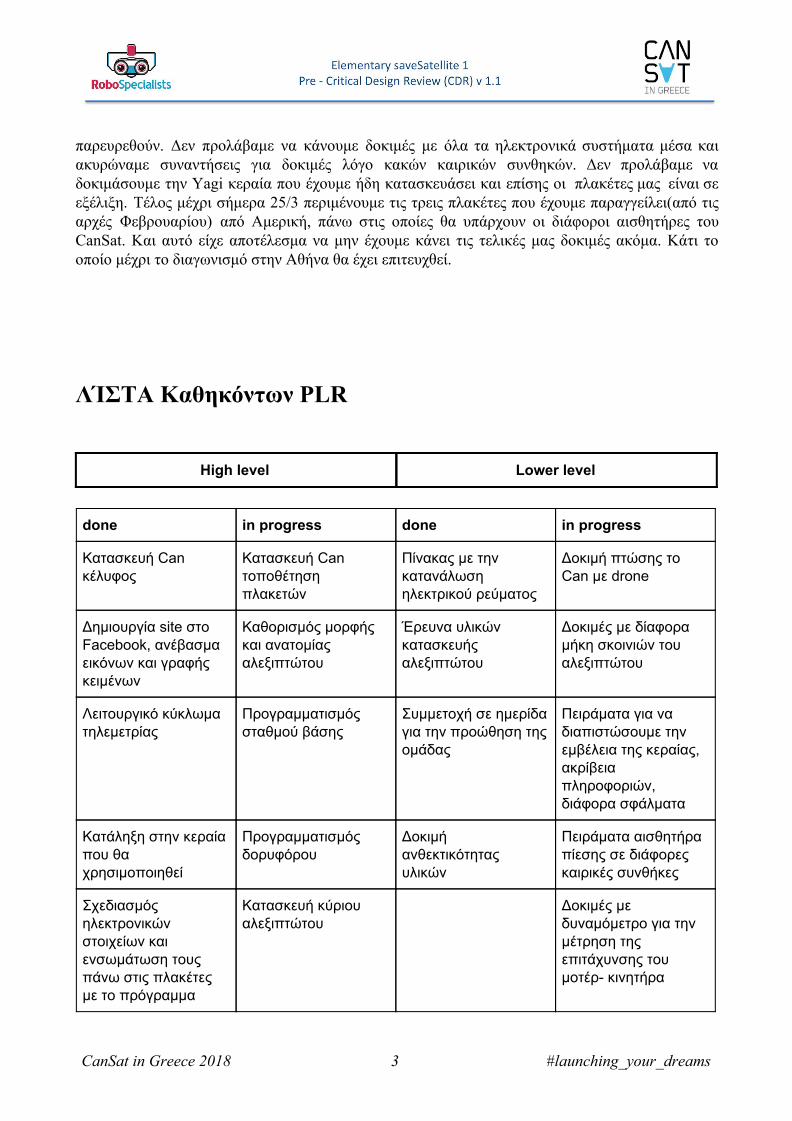
ΛΊΣΤΑ Καθηκόντων PLR
High level Lower level
done in progress done in progress
Κατασκευή Can κέλυφος
Κατασκευή Can τοποθέτηση πλακετών
Πίνακας με την κατανάλωση ηλεκτρικού ρεύματος
Δοκιμή πτώσης το Can με drone
Δημιουργία site στο Facebook, ανέβασμα εικόνων και γραφής κειμένων
Καθορισμός μορφής και ανατομίας αλεξιπτώτου
Έρευνα υλικών κατασκευής αλεξιπτώτου
Δοκιμές με δίαφορα μήκη σκοινιών του αλεξιπτώτου
Λειτουργικό κύκλωμα τηλεμετρίας
Προγραμματισμός σταθμού βάσης
Συμμετοχή σε ημερίδα για την προώθηση της ομάδας
Πειράματα για να διαπιστώσουμε την εμβέλεια της κεραίας, ακρίβεια πληροφοριών, διάφορα σφάλματα
Κατάληξη στην κεραία που θα χρησιμοποιηθεί
Προγραμματισμός δορυφόρου
Δοκιμή ανθεκτικότητας υλικών
Πειράματα αισθητήρα πίεσης σε διάφορες καιρικές συνθήκες
Σχεδιασμός ηλεκτρονικών στοιχείων και ενσωμάτωση τους πάνω στις πλακέτες με το πρόγραμμα
Κατασκευή κύριου αλεξιπτώτου
Δοκιμές με δυναμόμετρο για την μέτρηση της επιτάχυνσης του μοτέρ- κινητήρα
CanSat in Greece 2018 3 #launching_your_dreams
CAD
Σχεδιασμός βασικού σχεδίου δορυφόρου στο πρόγραμμα CAD
Δοκιμές με το GPS σε διάφορες τοποθεσίες
Δημιουργία Blog, βίντεο μια φορά τον μήνα και λογότυπο ομάδας
Κατασκευή δοκιμαστικού αλεξιπτώτου
Δοκιμή τηλεμετρίας από μεγάλη απόσταση
CanSat in Greece 2018 4 #launching_your_dreams
1 ΕΙΣΑΓΩΓΗ 1.1 Οργάνωση της ομάδας και ρόλοι των μελών Όνομα Θέση Ενδιαφέροντα Συμμετοχές Ώρες Ενασχόλησης
Γουναλάκης Παύλος
Υπεύθυνος καθηγητής
● Φυσική ● Ηλεκτρονικά
● Διάφοροι διαγωνισμοί
● Κάθε Κυριακή (17:00-21:00)
Όνομα Αρμοδιότητα Παραδείγματα
Ρικάρντι Μάρκος Υπεύθυνος Μηχανικών Εδάφους
● Σχεδιασμός τρισδιάστατης κατασκευής
● Κατασκευή δορυφόρου
Θεοδωρακέας Ευάγγελος Υπεύθυνος Θεωρητικών Αναλυτών
● Επιμέλεια αλεξιπτώτου ● Υπολογισμός παραμέτρων
δευτερεύουσας αποστολής ● Προγραμματισμός
δορυφόρου
Ζερενίδης Κωνσταντίνος Υπεύθυνος Ηλεκτρονικών ● Σχεδιασμός κυκλώματος ● Σχεδιασμός πίνακα
κατανάλωσης ενέργειας ● Προγραμματισμός
δορυφόρου Καπουσούζης Απόστολος Αρχηγός Ομάδας ● Σχεδιασμός τρισδιάστατης
κατασκευής ● Κόλληση ηλεκτρονικών
στοιχείων ● Επιτήρηση των υπόλοιπων
μελών της ομάδας Σεκερτζής Δημήτριος Υπεύθυνος Προγραμματιστών ● Προγραμματισμός
δορυφόρου ● Συμβολή στον σχεδιασμό
της κεραίας ● Αναζήτηση κατάλληλης
κεραίας Κούδας Αντώνης Υπεύθυνος Τηλεμετρίας ● Προγραμματισμός σταθμού
βάσης ● Αναζήτηση κατάλληλης
κεραίας
CanSat in Greece 2018 5 #launching_your_dreams
Γρηγοριάδης Αντώνιος Μηχανικός εδάφους ● Κατασκευή δορυφόρου ● Εύρεση ηλεκτρονικών
στοιχείων
Τσίλογλου Παναγιώτης Υπεύθυνος Προώθησης και Επικοινωνίας
● Δημιουργία ιστοσελίδων (facebook, Blog, Instagram)
● Διαδικτυακή Προώθηση ομάδας
Παπάνης Παναγιώτης Θεωρητικός Αναλυτής ● Επιμέλεια αλεξιπτώτου ● Υπολογισμός ύψους
ενεργοποίησης κινητήρα
Όνομα Θέση Ενδιαφέροντα Συμμετοχές Ώρες Ενασχόλησης Ρικάρντι Μάρκος
Μαθητής Α’ τάξης του 1ου Λυκείου Ξάνθης
● Μαθηματικά ● Μουσική ● Κατασκευές ● Ηλεκτρονικά
● FLL (2017-18) ● WRO (2016-18)
● Κάθε Κυριακή (17:00-21:00) ● Κάθε Παρασκευή (21:00-2:00) ● Σάββατο (18:00-21:00)
Θεοδωρακέας Ευάγγελος
Μαθητής Β’ τάξης του 3ου Λυκείου Ξάνθης
● Φυσική ● Προγραμματισ
μός ● Μαθηματικά ● Σκάκι ● Μπάντμιντον
● First Global Washington DC (2017)
● Εσθονία – Robotex Ταλλίν (2017)
● Κάθε Κυριακή (17:00-21:00) ● Κάθε Παρασκευή (21:00-2:00)
Ζερενίδης Κωνσταντίνος
Μαθητής Β’ τάξης του 3ου Λυκείου Ξάνθης
● Φυσική ● Μαθηματικά ● Προγραμματισ
μός ● Ζωγραφική
● First Global Washington DC (2017)
● Εσθονία – Robotex Ταλλίν (2017)
● Κάθε Κυριακή (17:00-21:00) ● Κάθε Παρασκευή (20:30-2:00)
Καπουσούζης Απόστολος
Μαθητής Β’ τάξης του 1ου Λυκείου Ξάνθης
● Μηχανολογία ● Μπάσκετ ● Ζωγραφική ● Κατασκευές
● First Global Washington DC (2017)
● Εσθονία –Robotex Ταλλίν (2017)
● WRO Greece (football) (2017-18)
● Κάθε Κυριακή (15:00-21:00) ● Κάθε Παρασκευή (20:30-2:00) ● Καθημερινά (2 ώρες)
Σεκερτζής Δημήτριος
Μαθητής Α’ τάξης του 1ου Λυκείου Ξάνθης
● Προγραμματισμός
● Μουσική ● Ηλεκτρονικά
● WRO Greece (regular) (2017)
● Κάθε Κυριακή (17:00-21:00) ● Κάθε Παρασκευή (20:30-2:00)
Κούδας Αντώνιος
Μαθητής Α’ τάξης του 3ου Λυκείου Ξάνθης
● Προγραμματισμός
● Φωτογραφία
● WRO Greece (regular) (2017)
● Κάθε Κυριακή (17:00-21:00) ● Κάθε Παρασκευή (20:30-2:00)
CanSat in Greece 2018 6 #launching_your_dreams
Γρηγοριάδης Αντώνιος
Μαθητής Γ’ τάξης του 2ου ΕΠΑΛ Ξάνθης
● Μηχανολογία ● Ηλεκτρονικά ● Φυσική
● First Global Washington DC (2017)
● Κάθε Κυριακή (17:00-21:00)
Τσίλογλου Παναγιώτης
Μαθητής Α’ τάξης του 1ου ΕΠΑΛ Ξάνθης
● Φωτογραφία ● Μαθηματικά
● Κάθε Κυριακή (17:00-21:00) ● Κάθε Παρασκευή (20:30-2:00)
Παπάνης Παναγιώτης
Μαθητής Α’ τάξης του 2ου Λυκείου Ξάνθης
● Φυσική ● Πληροφορική ● Μαθηματικά
● Κάθε Κυριακή (17:00-21:00)
1.2 Στόχοι της αποστολής Δευτερεύουσα αποστολή
Η δευτερεύουσα αποστολή μας είναι να εφαρμόσουμε ένα μηχανισμό προσομοίωσης ασφαλής επιστροφής παλαιών και ανενεργών δορυφόρων, τα λεγόμενα διαστημικά σκουπίδια. Όποιο τεχνητό αντικείμενο βρίσκεται στο εγγύς διαστημικό περιβάλλον έχει μια ημερομηνία λήξης. Από εκείνο το σημείο και μετά το αντικείμενο αυτό καταλαμβάνει μια χρηστική τροχιά αφαιρώντας την από τις διαθέσιμες τροχιές για τους μελλοντικούς δορυφόρους. Παράλληλα με την παλαίωση του δορυφόρου δημιουργείται η πιθανότητα εκτοξευτούν μικροαντικείμενα που θα κινούνται για μεγάλο χρονικό διάστημα (χρόνια) σε τροχιές πέριξ της Γης που θα μπορούσαν να προκαλέσουν καταστροφές σε οποιαδήποτε διαστημοσυσκευή βρεθεί στη τροχιά τους. Αν και ένα μεγάλο μέρος αυτών των αντικειμένων ρυθμίζονται να εισέλθουν στην ατμόσφαιρα της Γης και να καταστραφούν με την τριβή τους μέσω της ατμόσφαιρας, για τους μεγαλύτερους δορυφόρους αλλά και αυτούς που περιέχουν υψηλής αντοχής κέλυφος(θερμική ασπίδα) δεν μπορεί να εφαρμοστεί αυτή η λύση. Σε αυτά τα αντικείμενα καθορίσαμε ένα μοντέλο ασφαλής επιστροφής τους μέσω της δευτερεύουσας αποστολής.
Ουσιαστικά ο CanSat μας θα περιέχει δύο κατασκευές. Η πρώτη κατασκευή θα συμπεριλαμβάνει όλα τα υπολογιστικά μας συστήματα (αισθητήρες, arduino μπαταρίες) και θα προσομοιάζει τον ανενεργό δορυφόρο που θα θέλουμε να κατεβάσουμε από την τροχιά. Η δεύτερη θα είναι ένα σύστημα που θα περιέχει ένα κέλυφος, ένα κινητήρα και ένα αλεξίπτωτο που θα εφάπτονται στον εσωτερικό σύστημα και θα είναι πλήρως αποσπώμενο από αυτό. Η δεύτερη κατασκευή θα προσομοιάζει με την σειρά της το δορυφόρο που θα στέλναμε να κατεβάσει από τροχιά τον πρώτο. Ο στόχος της αποστολής αποτελείται από τα εξής:πρώτον πρέπει να προσγειωθεί όσο το δυνατόν πιο κάθετα. Δεύτερον θα πρέπει προσγειωθεί με μηδενική ταχύτητα. Τρίτον θα πρέπει το εξωτερικό σύστημα να είναι πλήρες αποσπώμενο από το εσωτερικό και το κέλυφος να αποτελείται από δύο στρώσεις,το εσωτερικό θα είναι μαλακό και το εξωτερικό σκληρό
Για να γίνει η αποστολή μας με επιτυχία θα πρέπει να κατασκευαστεί ένα πλήρες λειτουργικό cansat (SD,RF,PressureSensor,Arduino Pro Micro,fan unit ,accelerometer). Θα πρέπει κατά την διάρκεια της προσγείωσης να γίνονται οι προδιεγραμμένες μετρήσεις της θερμοκρασίας, της ατμοσφαιρικής πίεσης, της επιτάχυνσης, των γεωγραφικών συντεταγμένων και από αυτά να καθοριστεί η ταχύτητα του, το υψόμετρο του αλλά και η καθετότητα του κάθε χρονική στιγμή .Όλα αυτά τα δεδομένα θα καταγράφονται σε αποθηκευτικό δίσκο στον δορυφόρο αλλά και παράλληλα πρέπει να μεταδίδονται σε ζωντανό χρόνο στο σταθμό βάσης. Ενώ πρέπει να ολοκληρωθούν με επιτυχία οι προαναφερόμενοι στόχοι της δευτερεύουσας αποστολής.
CanSat in Greece 2018 7 #launching_your_dreams
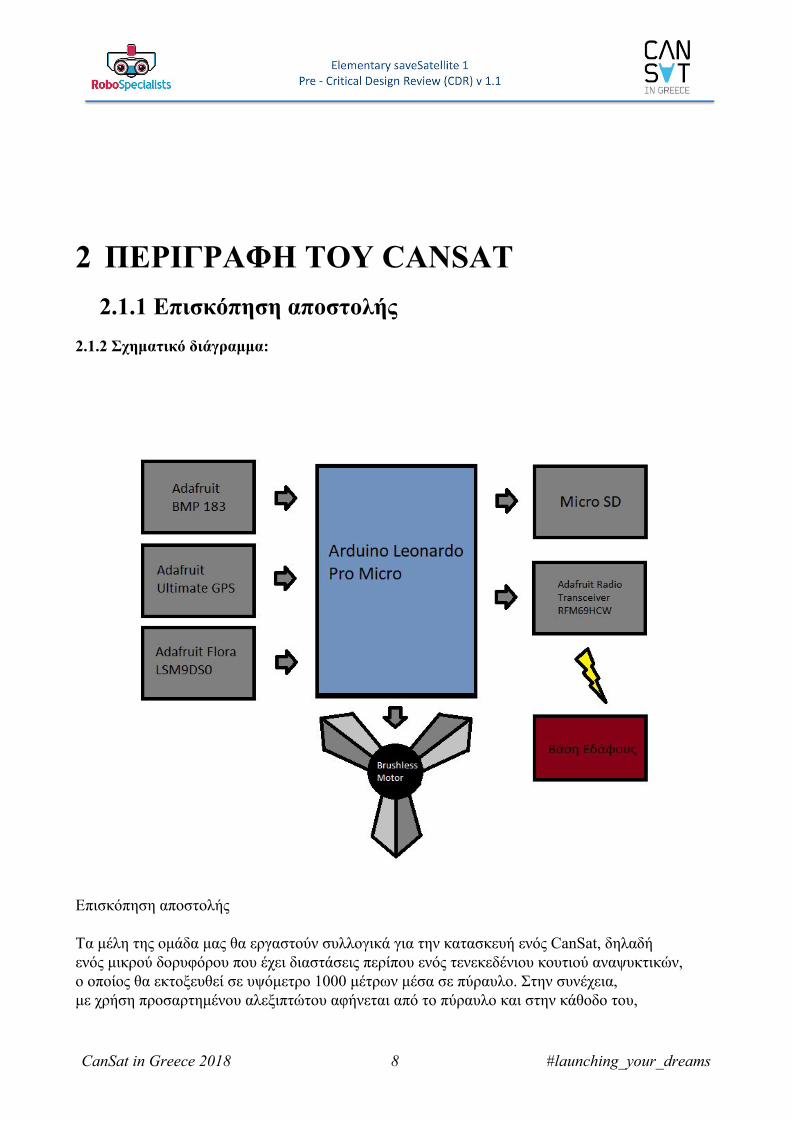
2 ΠΕΡΙΓΡΑΦΗ ΤΟΥ CANSAT 2.1.1 Επισκόπηση αποστολής 2.1.2 Σχηματικό διάγραμμα:
Επισκόπηση αποστολής Τα μέλη της ομάδα μας θα εργαστούν συλλογικά για την κατασκευή ενός CanSat, δηλαδή ενός μικρού δορυφόρου που έχει διαστάσεις περίπου ενός τενεκεδένιου κουτιού αναψυκτικών, ο οποίος θα εκτοξευθεί σε υψόμετρο 1000 μέτρων μέσα σε πύραυλο. Στην συνέχεια, με χρήση προσαρτημένου αλεξιπτώτου αφήνεται από το πύραυλο και στην κάθοδο του,
CanSat in Greece 2018 8 #launching_your_dreams
με την βοήθεια διαφόρων αισθητήρων, κάνει μετρήσεις τις οποίες και αναλύουμε. Πρωτεύουσα Αποστολή: Ο πρωταρχικός στόχος του δορυφόρου είναι η καταγραφή της θερμοκρασίας, της πίεσης, του υψομέτρου και της του γεωγραφικής θέσης κατά τη διάρκεια της πτώσης του. Αυτό θα επιτευχθεί με την χρήση αισθητήρων όπως: - Adafruit BMP183 (ένας ψηφιακός αισθητήρας πίεσης και θερμοκρασίας με την βοήθεια του οποίου υπολογίζουμε και το υψόμετρο). - Adafruit Ultimate GPS (χάρη σε αυτό το GPS βρίσκουμε τις γεωμετρικές συντεταγμένες του CanSat, την ταχύτητα του και τιμές χρόνου όπως τα λεπτά, τα δευτερόλεπτα κ.τ.λ.) Τα δεδομένα που λαμβάνει ο δορυφόρος σε μια Micro SD και στέλνονται μέσω ενός πομποδέκτη (Adafruit Radio Transceiver RFM69HCW) στον σταθμό εδάφους. Δευτερεύουσα Αποστολή: Εμπνευσμένοι από το πρόβλημα των λεγόμενων διαστημικών σκουπιδιών θελήσαμε να βρούμε έναν τρόπο ασφαλής προσεδάφισης για τον δορυφόρο. Γι' αυτό ο CanSat μας αποτελείται από δύο κατασκευές. Η πρώτη κατασκευή περιέχει όλα υπολογιστικά μας συστήματα για την πρωτεύουσα αποστολή ενώ η δεύτερη είναι ένα κέλυφος που προστατεύει τον δορυφόρο. Το κέλυφος αυτό θα λειτουργεί ως εξής: - Το υλικό στο εξωτερικό του είναι ανθεκτικό ενώ στο εσωτερικό του μαλακό για να προστατεύει την πρώτη κατασκευή με την οποία. - Εφάπτεται με τέτοιο τρόπο που διευκολύνεται η αφαίρεση και η επανατοποθέτηση του. - Έχει συνδεδεμένο επάνω του έναν ανεμιστήρα (Ducted Fan Unit with motor).Το μοτέρ αυτό θα είναι προγραμματισμένο από το επιθυμητό ύψος και μετά να ανοίγει όσο ο δορυφόρος είναι κάθετο ως προς τον ορίζοντα. Αν αλλάζει η κλίση πάνω από ένα επιθυμητό όριο το οποίο θα ελέγχεται από το επιταχυνσιόμετρο τότε θα κλείνει ο ανεμιστήρας. Τέλος, για να επιτευχθεί η κάθετη προσγείωση του CanSat διατηρήσαμε χαμηλό το κέντρο βάρους του και θα ελέγχεται η κλίση του με την χρήση επιταχυνσιόμετρου.
CanSat in Greece 2018 9 #launching_your_dreams
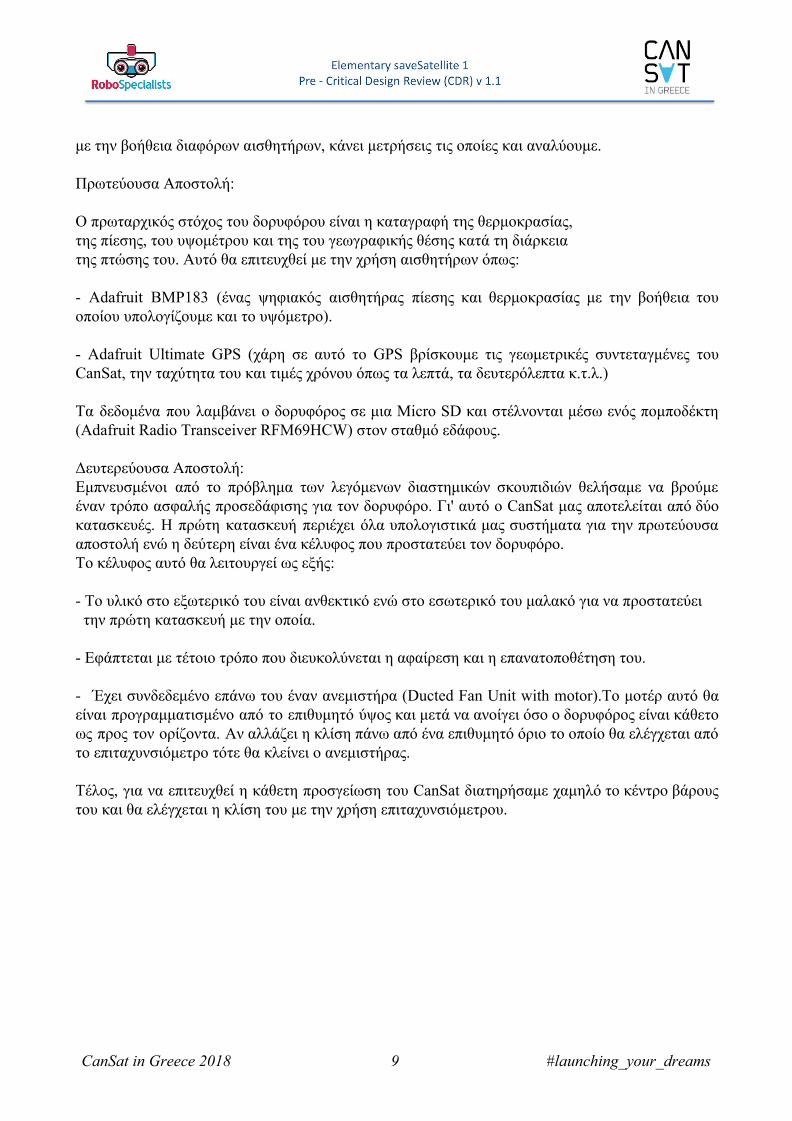
. Για να υπολογίσουμε το πότε θα χρειαστεί να ενεργοποιηθεί ο κινητήρας ώστε να κατέβει το CanSat με μηδενική ταχύτητα στο έδαφος, θα χρησιμοποιήσουμε την εξίσωση:
S = *t- a*t^2u0 21
0 = -a*t => t=u0 au0
όπου το U=8m/s και F=m*a F (=από την μέτρηση) m (=μάζα του δορυφόρου, δηλ. m=0.35kg)
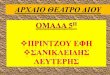
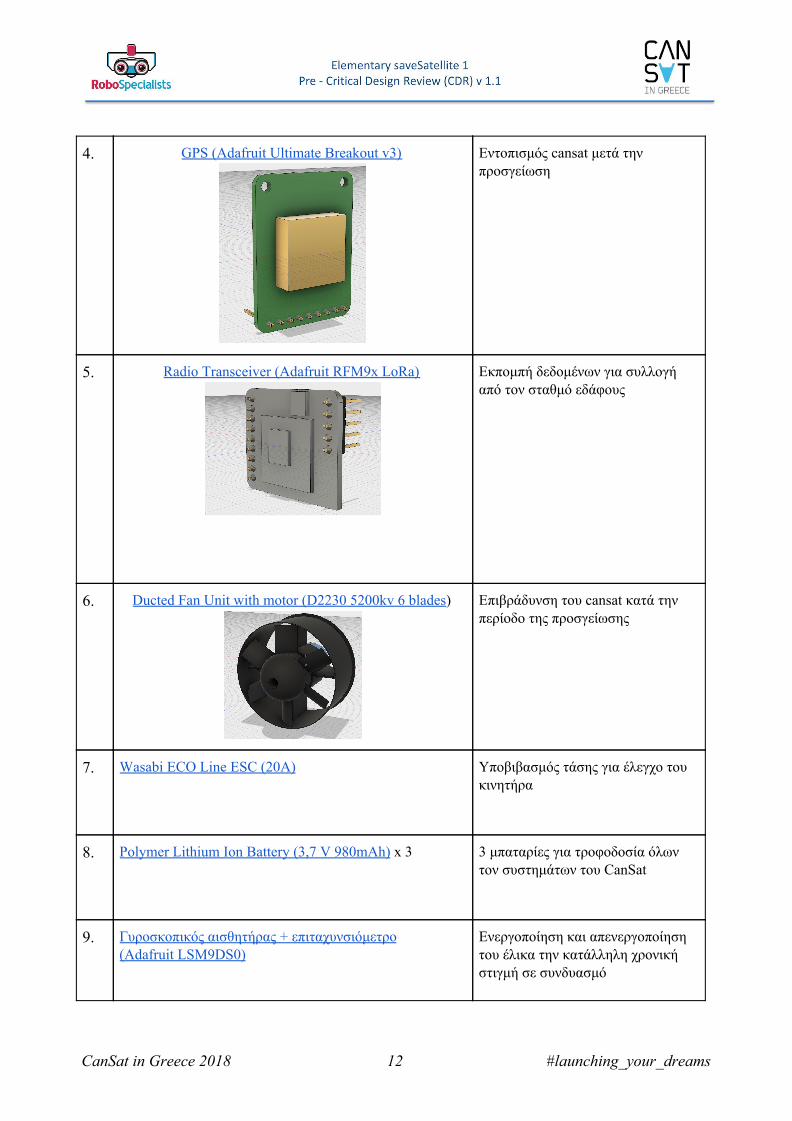
2.2.1 Μηχανολογικό/κατασκευαστικό σχέδιο Οι αισθητήρες και όλα τα ηλεκτρονικά στοιχεία που είναι απαραίτητα για την λειτουργία του cansat θα είναι τοποθετημένοι οριζόντια σε 3 διαφορετικά επίπεδα μέσα στο κύριο κέλυφος το οποίο θα είναι εκτυπωμένο σε 3D εκτυπωτή από πλαστικό υλικό. Αυτά τα επίπεδα θα είναι συνδεδεμένα μεταξύ τους με 4 μικρούς ράβδους οι οποίοι έπειτα θα στηριχθούν πάνω στο εσωτερικό κέλυφος .Κάτω από τις πλακέτες θα τοποθετηθούν 3 μπαταρίες των 3,7 Volt η οποίες θα είναι συνδεδεμένες σε σειρά και μέσο ενός ρυθμιστή τάσης που θα υποβιβάζει την τάση στα 5 Volt για την λειτουργία όλων των κυκλωμάτων ενώ ταυτόχρονα θα τροφοδοτεί και τον έλικα που θα είναι τοποθετημένος στο εξωτερικό κέλυφος. Ο έλικας σε συνδυασμό με έναν γυροσκοπικό αισθητήρα θα χρησιμοποιηθούν για την επιβράδυνση του cansat κατά την περίοδο της προσγείωσης για να επιτευχθεί μια πιο ομαλή προσγείωση για την προστασία του “φορτίου” .Πιο συγκεκριμένα ο αισθητήρας θα ελέγχει τον έλικα ώστε να δίνει
CanSat in Greece 2018 10 #launching_your_dreams
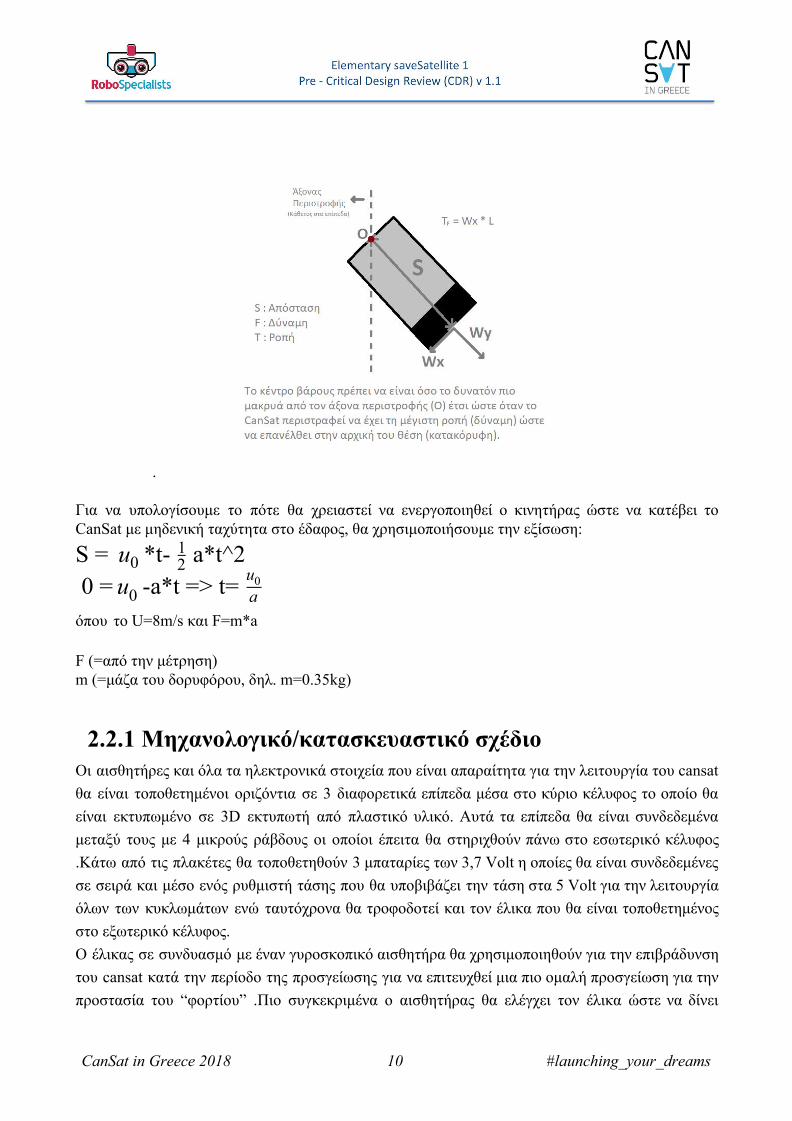
ώθηση μόνο όταν το cansat είναι κάθετα προς το έδαφος για να αποφευχθεί η περίπτωση να χαθεί ο έλεγχος και να πέσει οριζόντια στο έδαφος και επιπλέον θα καταλάβουμε αν καταφέραμε να προσγειωθούμε κάθετα .Το εξωτερικό κέλυφος θα έχει πάχος 5mm. Μέχρι στιγμής δεν έχουμε στην κατοχή μας τις πλακέτες στις οποίες θα συνδεθούν όλα τα ηλεκτρονικά μέρει του cansat και για αυτόν τον λόγο δεν υπάρχουν φωτογραφίες με το cansat ολοκληρωμένο. Ο σχεδιασμός του CanSat έγινε με τη βοήθεια του λογισμικού Autodesk Fusion 360. Προκειμένου να εξοικειωθούμε με το λογισμικό αρχικά σχεδιάσαμε το Arduino και τους αισθητήρες. Στη συνέχεια αφού μάθαμε να δουλεύουμε καλά το λογισμικό, αρχίσαμε την κανονική σχεδίαση του CanSat, η οποία συνεχίζεται μέχρι σήμερα. Παρακάτω θα βρείτε φωτογραφίες από τα αρχικά μας σχέδια, καθώς επίσης και σχέδια από την σχεδίαση του δορυφόρου μας.
1. Arduino Leonardo Pro Micro
Έλεγχος όλων των συστημάτων του cansat
2. Αισθητήρας Πίεσης και Θερμοκρασίας (BMP 183)
Συλλογή τιμών θερμοκρασίας και πίεσις και υπολογισμός υψόμετρου μέσο αυτόν
3. Micro SD Board (Adafruit)
Αποθήκευση όλων των μετρήσεων για σύγκριση με τα ληφθέντα αρχεία μέσο κεραίας για τειχών απώλειες
CanSat in Greece 2018 11 #launching_your_dreams
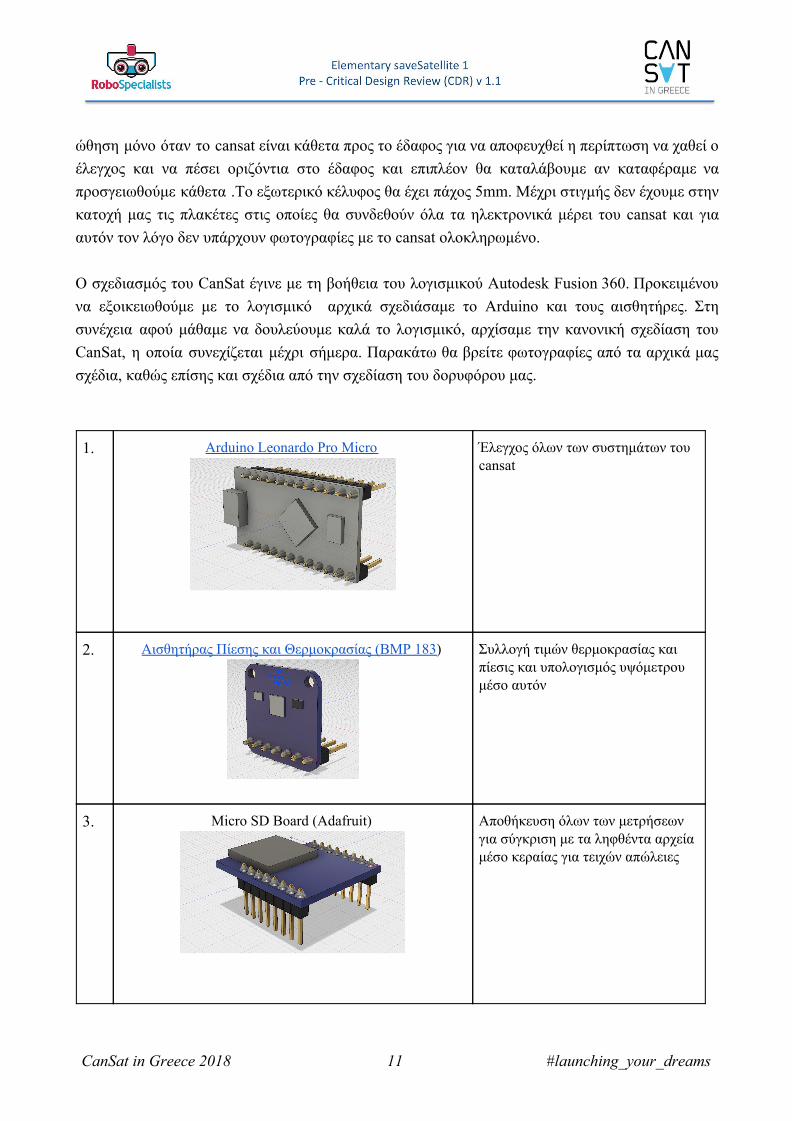
4. GPS (Adafruit Ultimate Breakout v3)
Εντοπισμός cansat μετά την προσγείωση
5. Radio Transceiver (Adafruit RFM9x LoRa)
Εκπομπή δεδομένων για συλλογή από τον σταθμό εδάφους
6. Ducted Fan Unit with motor (D2230 5200kv 6 blades)
Επιβράδυνση του cansat κατά την περίοδο της προσγείωσης
7. Wasabi ECO Line ESC (20A) Υποβιβασμός τάσης για έλεγχο του κινητήρα
8. Polymer Lithium Ion Battery (3,7 V 980mAh) x 3 3 μπαταρίες για τροφοδοσία όλων τον συστημάτων του CanSat
9. Γυροσκοπικός αισθητήρας + επιταχυνσιόμετρο (Adafruit LSM9DS0)
Ενεργοποίηση και απενεργοποίηση του έλικα την κατάλληλη χρονική στιγμή σε συνδυασμό
CanSat in Greece 2018 12 #launching_your_dreams
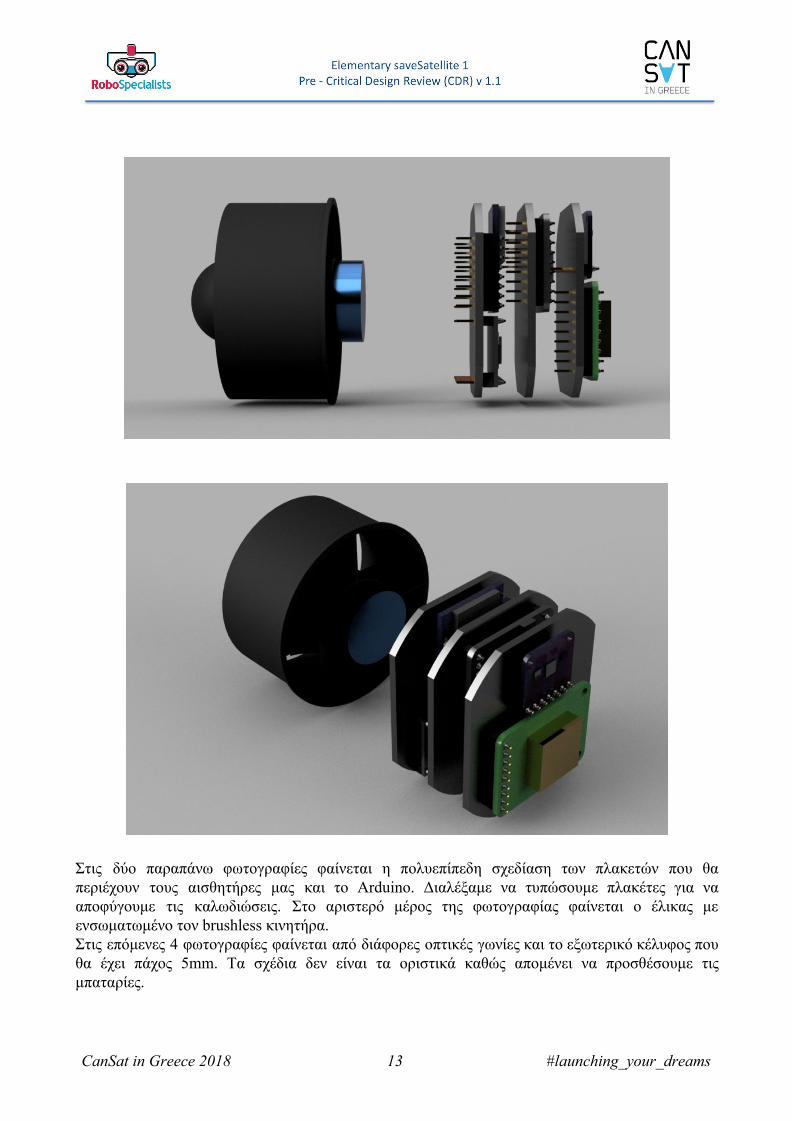
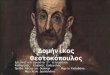
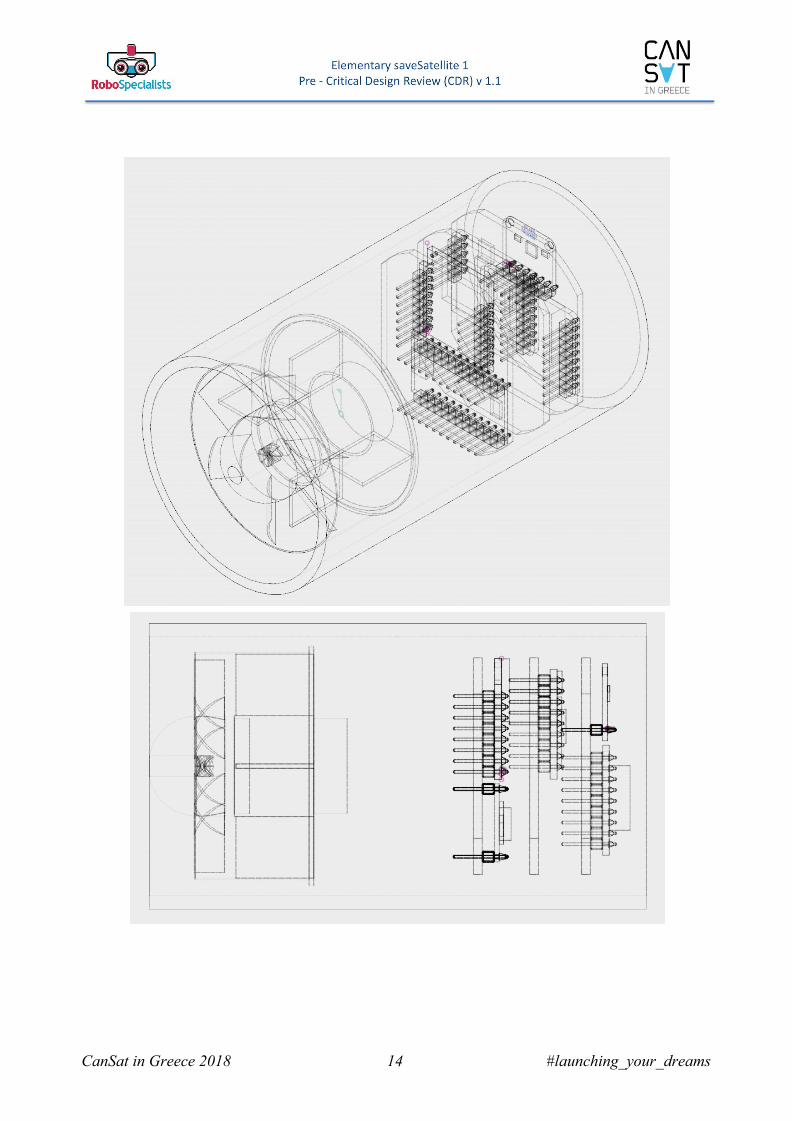
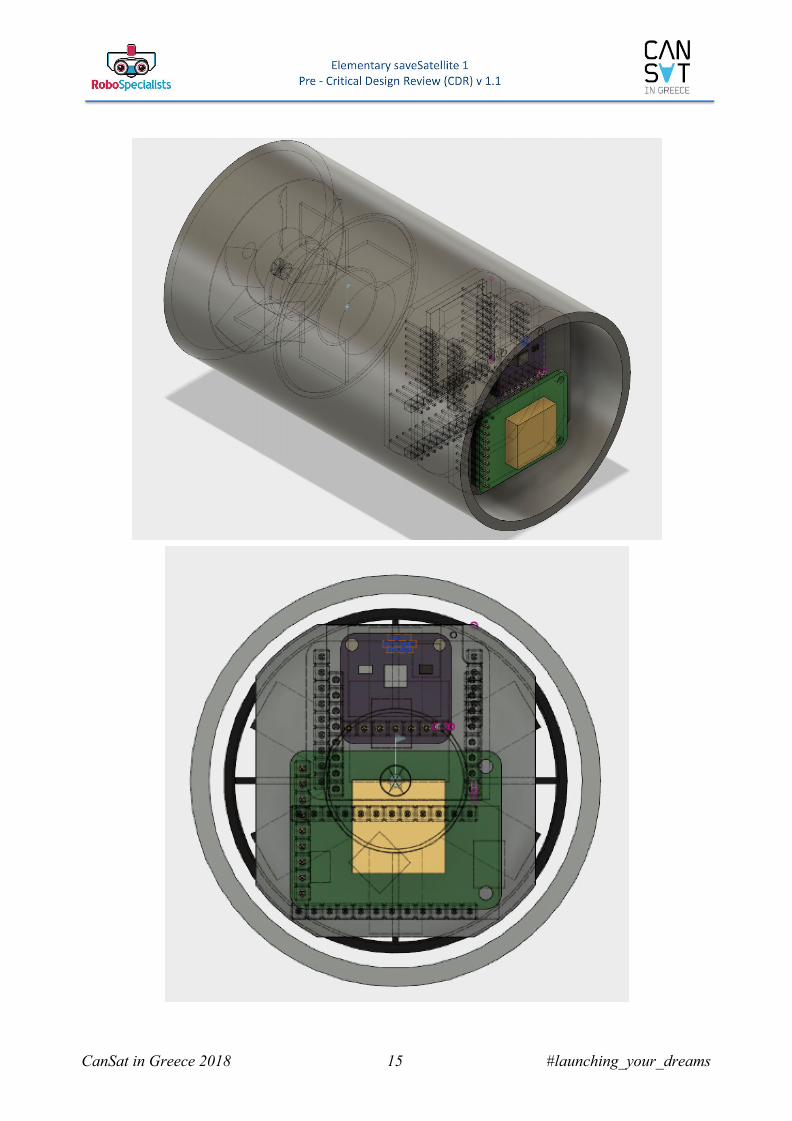
Στις δύο παραπάνω φωτογραφίες φαίνεται η πολυεπίπεδη σχεδίαση των πλακετών που θα περιέχουν τους αισθητήρες μας και το Arduino. Διαλέξαμε να τυπώσουμε πλακέτες για να αποφύγουμε τις καλωδιώσεις. Στο αριστερό μέρος της φωτογραφίας φαίνεται ο έλικας με ενσωματωμένο τον brushless κινητήρα. Στις επόμενες 4 φωτογραφίες φαίνεται από διάφορες οπτικές γωνίες και το εξωτερικό κέλυφος που θα έχει πάχος 5mm. Τα σχέδια δεν είναι τα οριστικά καθώς απομένει να προσθέσουμε τις μπαταρίες.
CanSat in Greece 2018 13 #launching_your_dreams
CanSat in Greece 2018 14 #launching_your_dreams
CanSat in Greece 2018 15 #launching_your_dreams
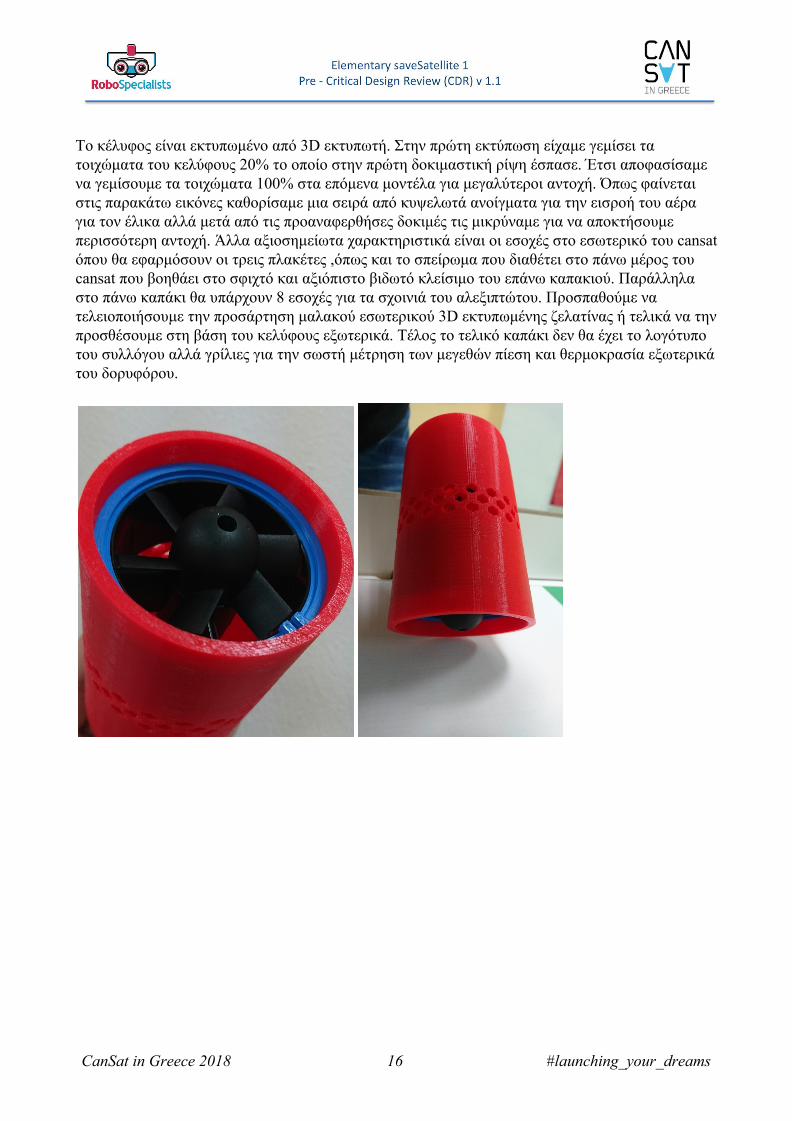
Το κέλυφος είναι εκτυπωμένο από 3D εκτυπωτή. Στην πρώτη εκτύπωση είχαμε γεμίσει τα τοιχώματα του κελύφους 20% το οποίο στην πρώτη δοκιμαστική ρίψη έσπασε. Έτσι αποφασίσαμε να γεμίσουμε τα τοιχώματα 100% στα επόμενα μοντέλα για μεγαλύτεροι αντοχή. Όπως φαίνεται στις παρακάτω εικόνες καθορίσαμε μια σειρά από κυψελωτά ανοίγματα για την εισροή του αέρα για τον έλικα αλλά μετά από τις προαναφερθήσες δοκιμές τις μικρύναμε για να αποκτήσουμε περισσότερη αντοχή. Άλλα αξιοσημείωτα χαρακτηριστικά είναι οι εσοχές στο εσωτερικό του cansat όπου θα εφαρμόσουν οι τρεις πλακέτες ,όπως και το σπείρωμα που διαθέτει στο πάνω μέρος του cansat που βοηθάει στο σφιχτό και αξιόπιστο βιδωτό κλείσιμο του επάνω καπακιού. Παράλληλα στο πάνω καπάκι θα υπάρχουν 8 εσοχές για τα σχοινιά του αλεξιπτώτου. Προσπαθούμε να τελειοποιήσουμε την προσάρτηση μαλακού εσωτερικού 3D εκτυπωμένης ζελατίνας ή τελικά να την προσθέσουμε στη βάση του κελύφους εξωτερικά. Τέλος το τελικό καπάκι δεν θα έχει το λογότυπο του συλλόγου αλλά γρίλιες για την σωστή μέτρηση των μεγεθών πίεση και θερμοκρασία εξωτερικά του δορυφόρου.
CanSat in Greece 2018 16 #launching_your_dreams
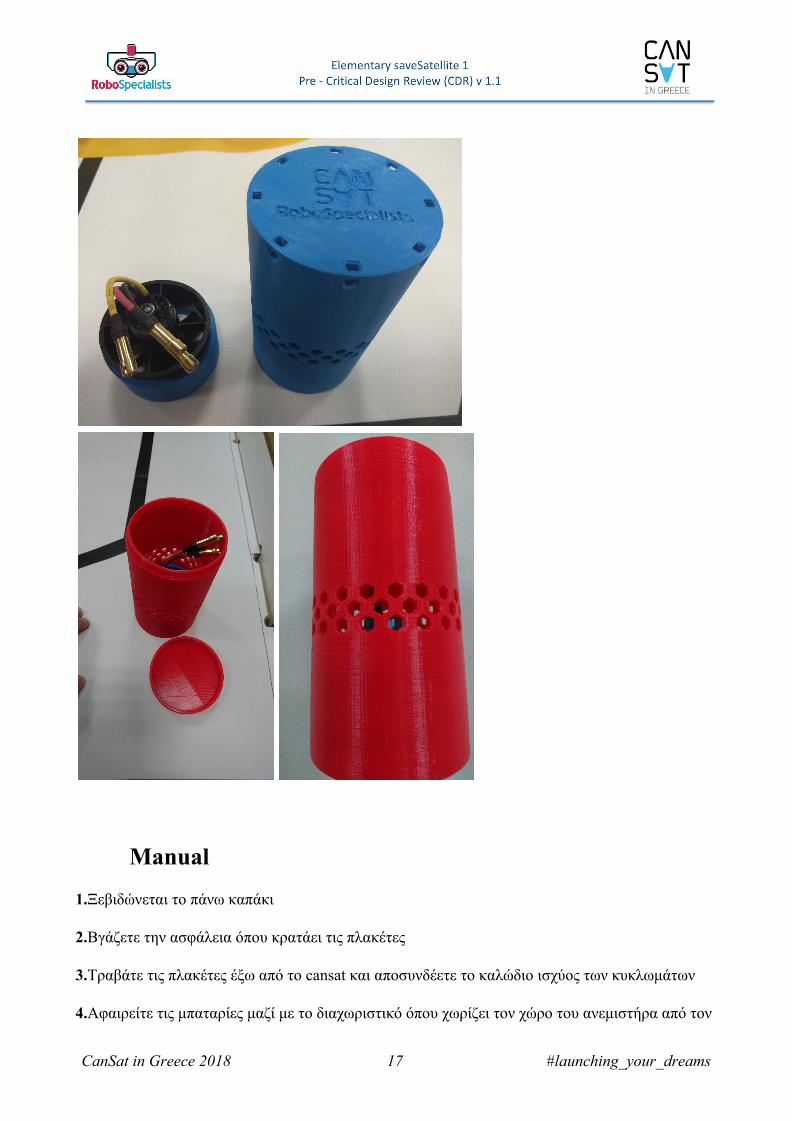
Manual 1.Ξεβιδώνεται το πάνω καπάκι 2.Βγάζετε την ασφάλεια όπου κρατάει τις πλακέτες 3.Τραβάτε τις πλακέτες έξω από το cansat και αποσυνδέετε το καλώδιο ισχύος των κυκλωμάτων 4.Αφαιρείτε τις μπαταρίες μαζί με το διαχωριστικό όπου χωρίζει τον χώρο του ανεμιστήρα από τον
CanSat in Greece 2018 17 #launching_your_dreams
χώρο των κυκλωμάτων 5.Από την κάτω πλευρά του cansat αφαιρείτε την ασφάλεια όπου επιτρέπει την εξαγωγή του έλικα
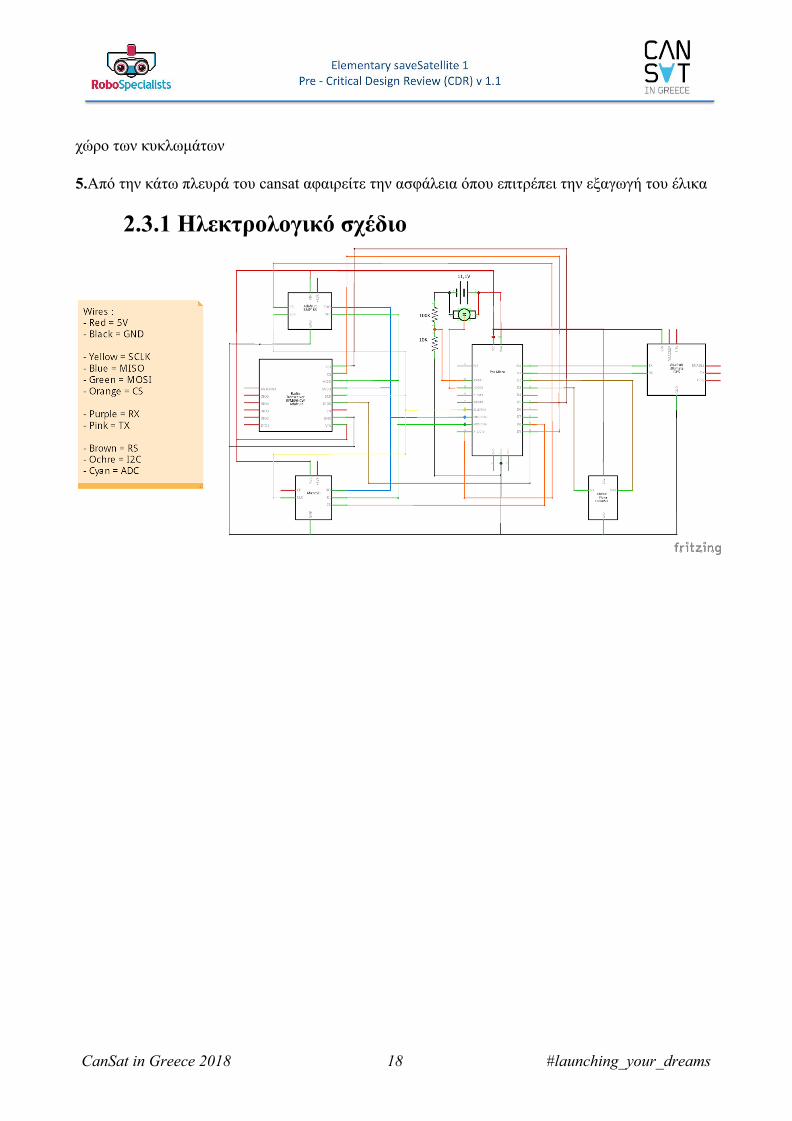
2.3.1 Ηλεκτρολογικό σχέδιο
CanSat in Greece 2018 18 #launching_your_dreams
● 3 Μπαταρίες λιθίου 3,7 volt 980 mah
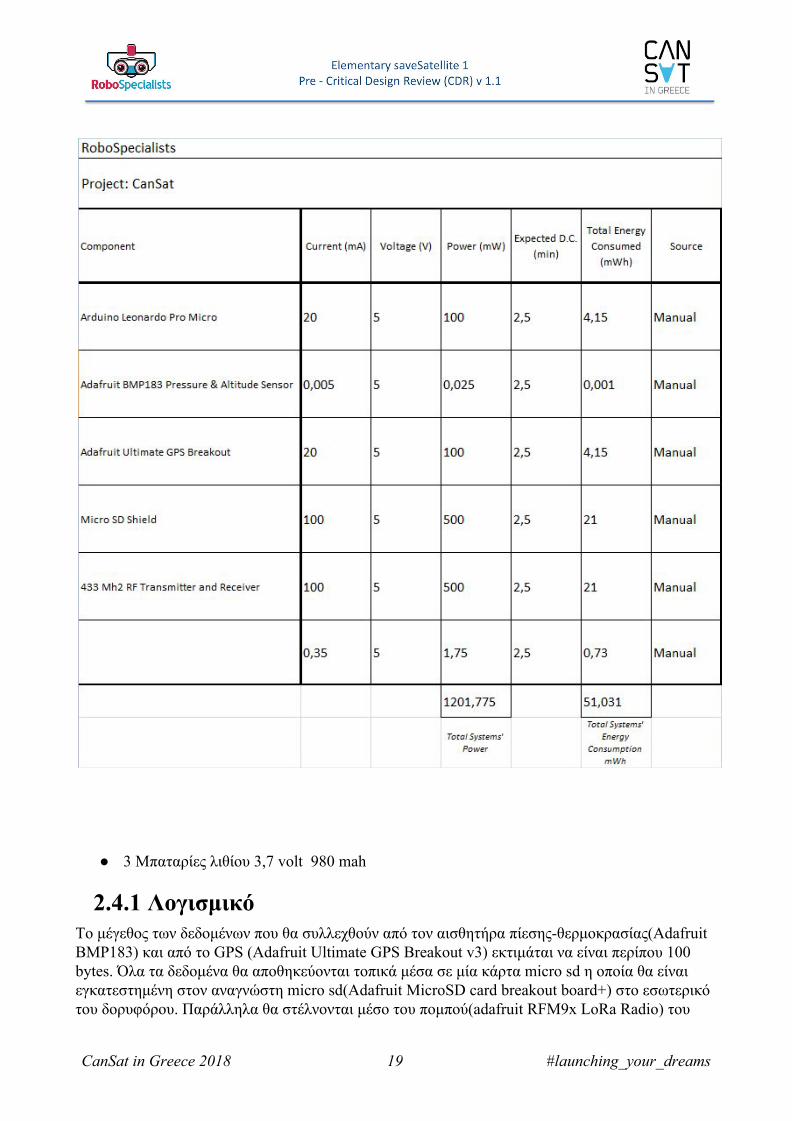
2.4.1 Λογισμικό Το μέγεθος των δεδομένων που θα συλλεχθούν από τον αισθητήρα πίεσης-θερμοκρασίας(Adafruit BMP183) και από το GPS (Adafruit Ultimate GPS Breakout v3) εκτιμάται να είναι περίπου 100 bytes. Όλα τα δεδομένα θα αποθηκεύονται τοπικά μέσα σε μία κάρτα micro sd η οποία θα είναι εγκατεστημένη στον αναγνώστη micro sd(Adafruit MicroSD card breakout board+) στο εσωτερικό του δορυφόρου. Παράλληλα θα στέλνονται μέσο του πομπού(adafruit RFM9x LoRa Radio) του
CanSat in Greece 2018 19 #launching_your_dreams
δορυφόρου με μια μικρή κεραία μήκους 16,5 εκατοστών η οποία θα προεξέχει από τον δορυφόρο. Ο σταθμός θα λαμβάνει τα δεδομένα αυτά με μια yagi κεραία που θα είναι συνδεδεμένη με τον αντίστοιχο δέκτη(adafruit RFM9x LoRa Radio) ενσωματωμένο σε ένα Arduino Uno.
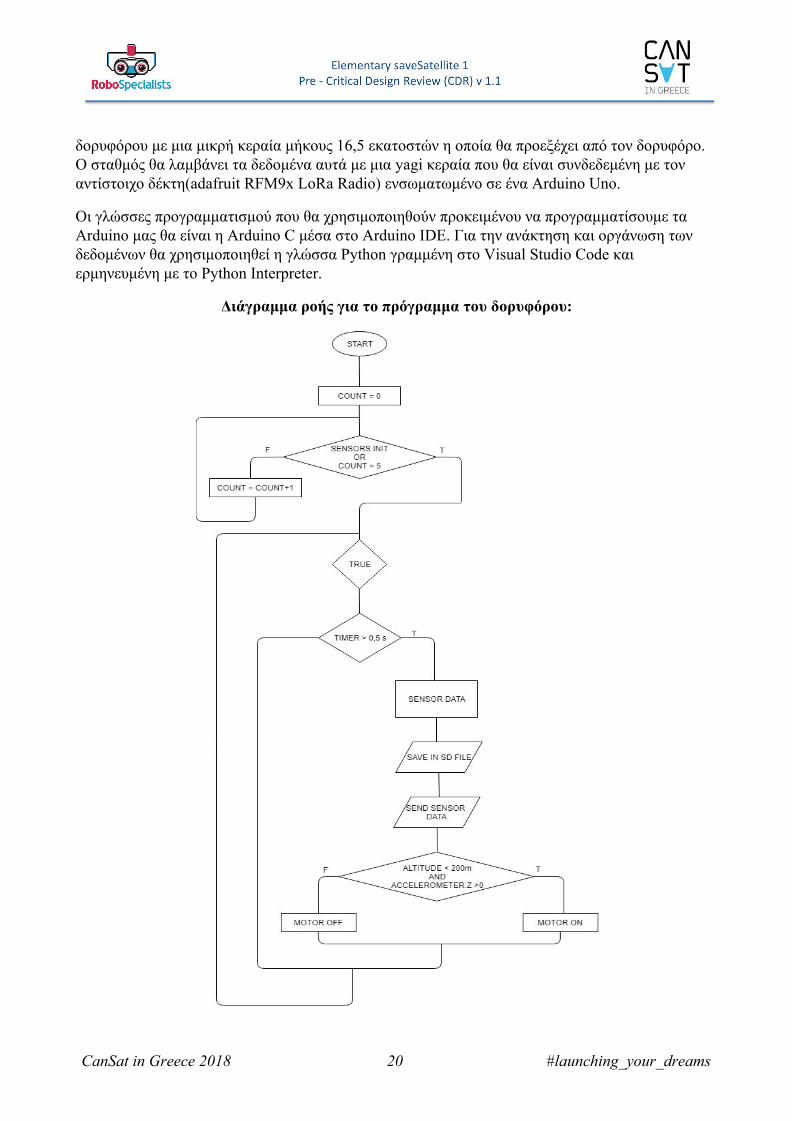
Οι γλώσσες προγραμματισμού που θα χρησιμοποιηθούν προκειμένου να προγραμματίσουμε τα Arduino μας θα είναι η Arduino C μέσα στο Arduino IDE. Για την ανάκτηση και οργάνωση των δεδομένων θα χρησιμοποιηθεί η γλώσσα Python γραμμένη στο Visual Studio Code και ερμηνευμένη με το Python Interpreter.
Διάγραμμα ροής για το πρόγραμμα του δορυφόρου:
CanSat in Greece 2018 20 #launching_your_dreams
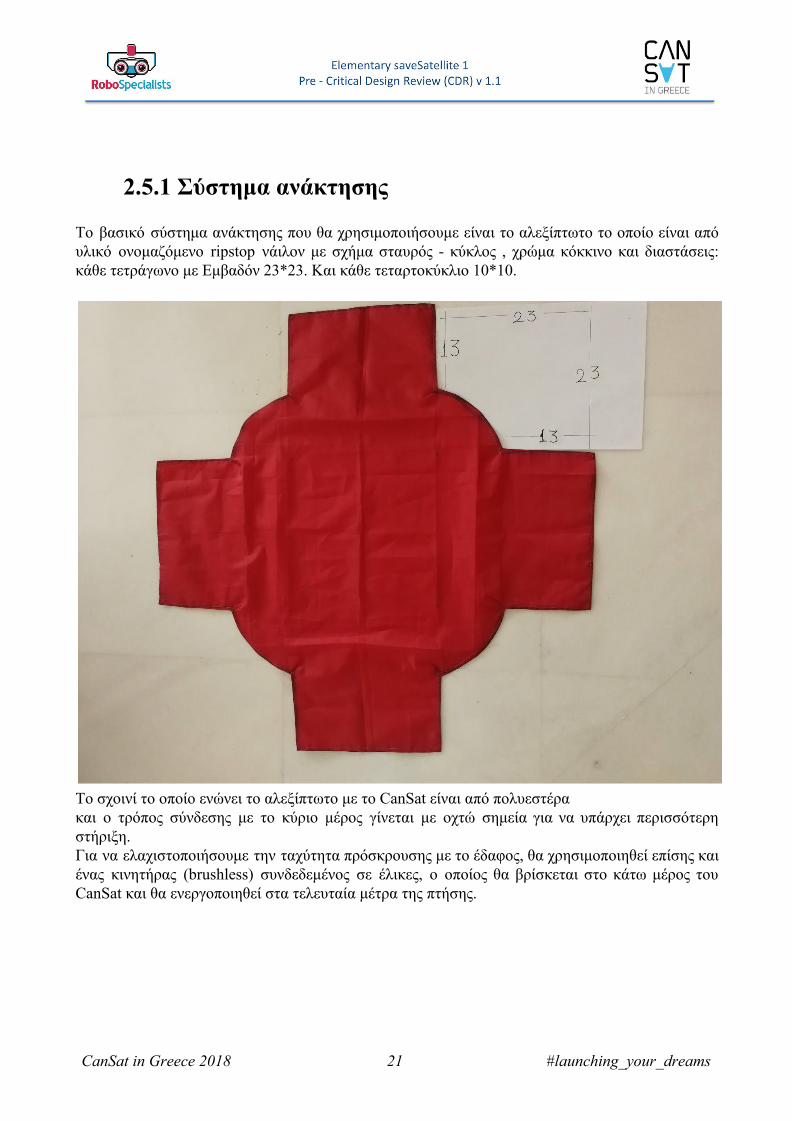
2.5.1 Σύστημα ανάκτησης Το βασικό σύστημα ανάκτησης που θα χρησιμοποιήσουμε είναι το αλεξίπτωτο το οποίο είναι από υλικό ονομαζόμενο ripstop νάιλον με σχήμα σταυρός - κύκλος , χρώμα κόκκινο και διαστάσεις: κάθε τετράγωνο με Εμβαδόν 23*23. Και κάθε τεταρτοκύκλιο 10*10.
Το σχοινί το οποίο ενώνει το αλεξίπτωτο με το CanSat είναι από πολυεστέρα και ο τρόπος σύνδεσης με το κύριο μέρος γίνεται με οχτώ σημεία για να υπάρχει περισσότερη στήριξη. Για να ελαχιστοποιήσουμε την ταχύτητα πρόσκρουσης με το έδαφος, θα χρησιμοποιηθεί επίσης και ένας κινητήρας (brushless) συνδεδεμένος σε έλικες, ο οποίος θα βρίσκεται στο κάτω μέρος του CanSat και θα ενεργοποιηθεί στα τελευταία μέτρα της πτήσης.
CanSat in Greece 2018 21 #launching_your_dreams
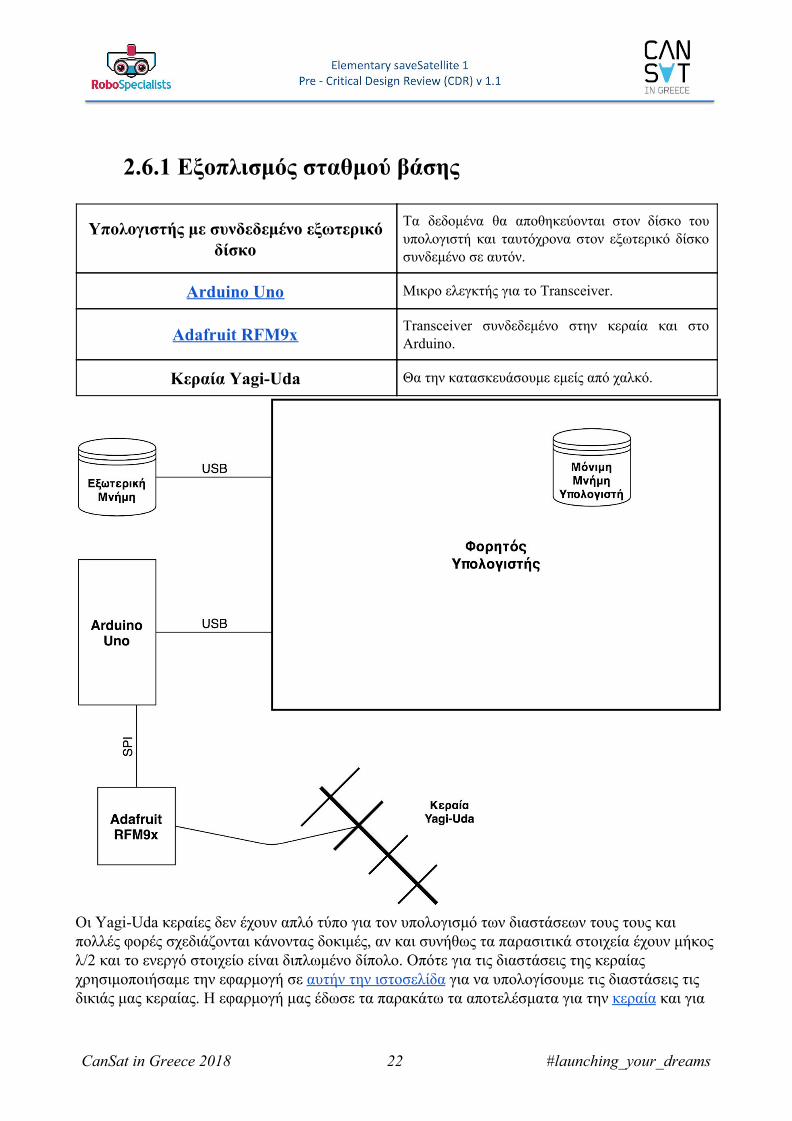
2.6.1 Εξοπλισμός σταθμού βάσης
Υπολογιστής με συνδεδεμένο εξωτερικό δίσκο
Τα δεδομένα θα αποθηκεύονται στον δίσκο του υπολογιστή και ταυτόχρονα στον εξωτερικό δίσκο συνδεμένο σε αυτόν.
Arduino Uno Μικρο ελεγκτής για το Transceiver.
Adafruit RFM9x Transceiver συνδεδεμένο στην κεραία και στο Arduino.
Κεραία Yagi-Uda Θα την κατασκευάσουμε εμείς από χαλκό.
Οι Yagi-Uda κεραίες δεν έχουν απλό τύπο για τον υπολογισμό των διαστάσεων τους τους και πολλές φορές σχεδιάζονται κάνοντας δοκιμές, αν και συνήθως τα παρασιτικά στοιχεία έχουν μήκος λ/2 και το ενεργό στοιχείο είναι διπλωμένο δίπολο. Οπότε για τις διαστάσεις της κεραίας χρησιμοποιήσαμε την εφαρμογή σε αυτήν την ιστοσελίδα για να υπολογίσουμε τις διαστάσεις τις δικιάς μας κεραίας. Η εφαρμογή μας έδωσε τα παρακάτω τα αποτελέσματα για την κεραία και για
CanSat in Greece 2018 22 #launching_your_dreams
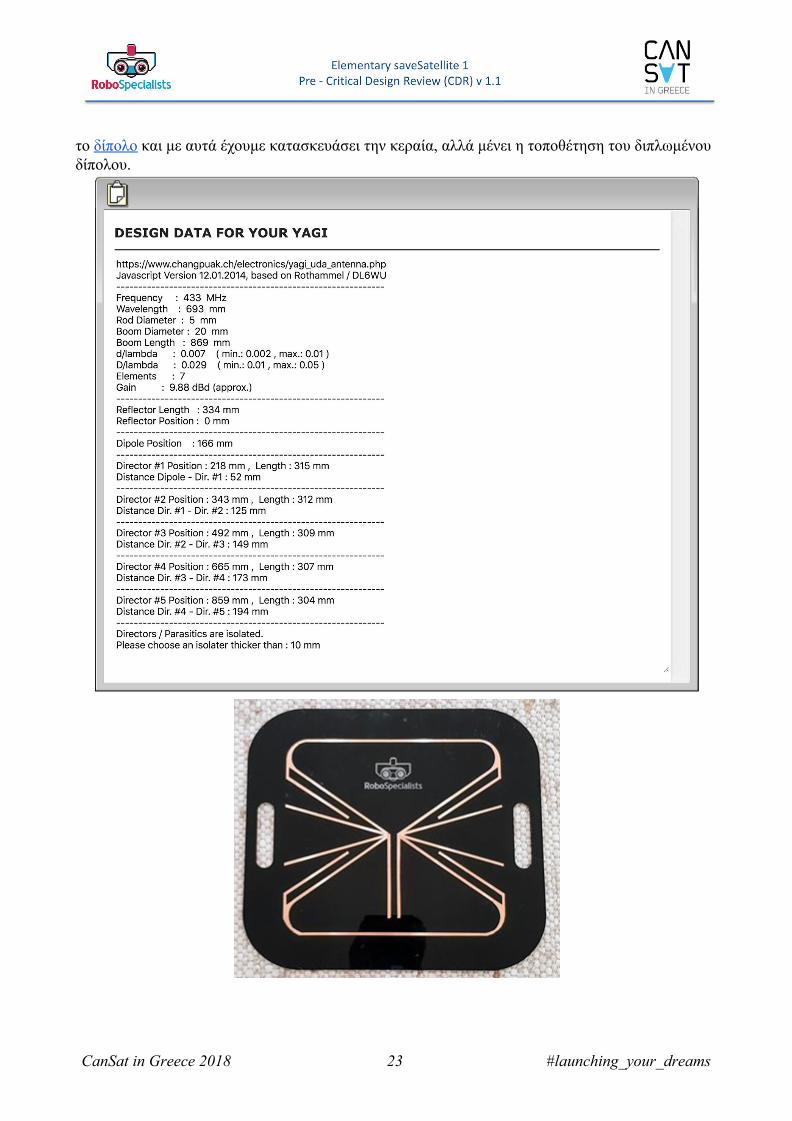
το δίπολο και με αυτά έχουμε κατασκευάσει την κεραία, αλλά μένει η τοποθέτηση του διπλωμένου δίπολου.
CanSat in Greece 2018 23 #launching_your_dreams
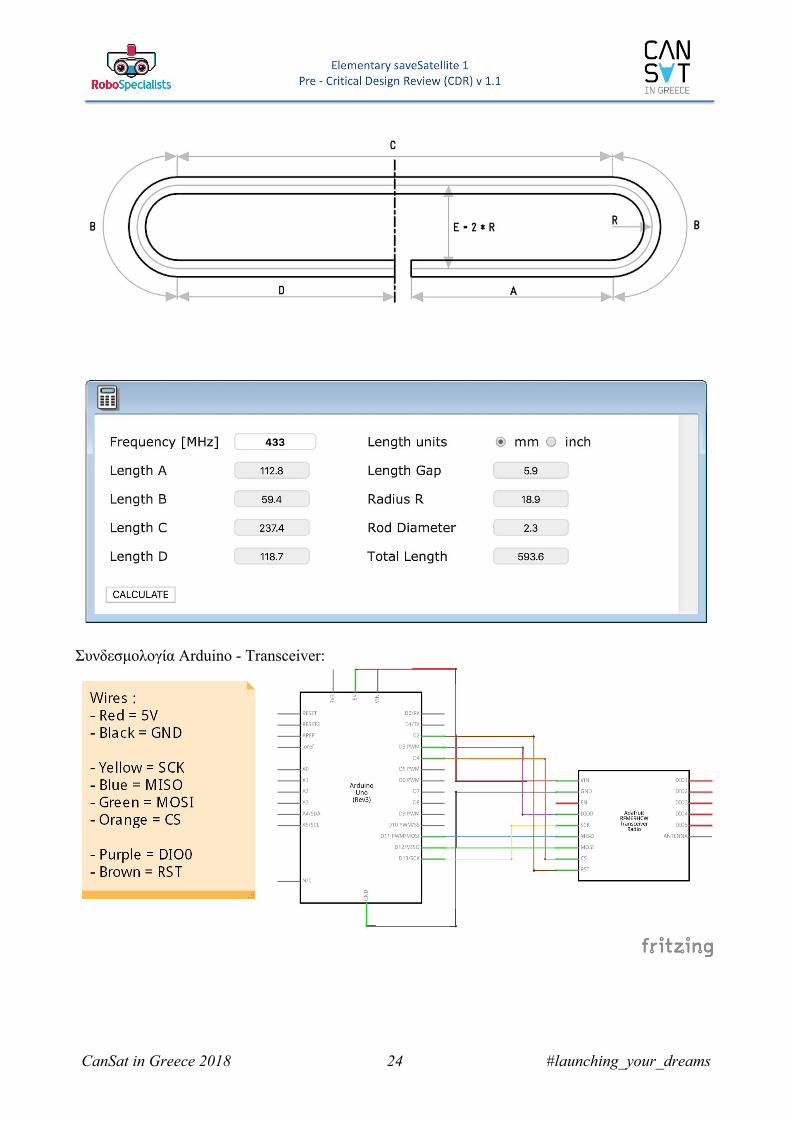
Συνδεσμολογία Arduino - Transceiver:
CanSat in Greece 2018 24 #launching_your_dreams
3 ΠΡΟΓΡΑΜΜΑΤΙΣΜΟΣ ΤΟΥ PROJECT 3.1.1 Χρονικό πλάνο της προετοιμασίας του CanSat
3.2.1 Απαιτούμενοι πόροι
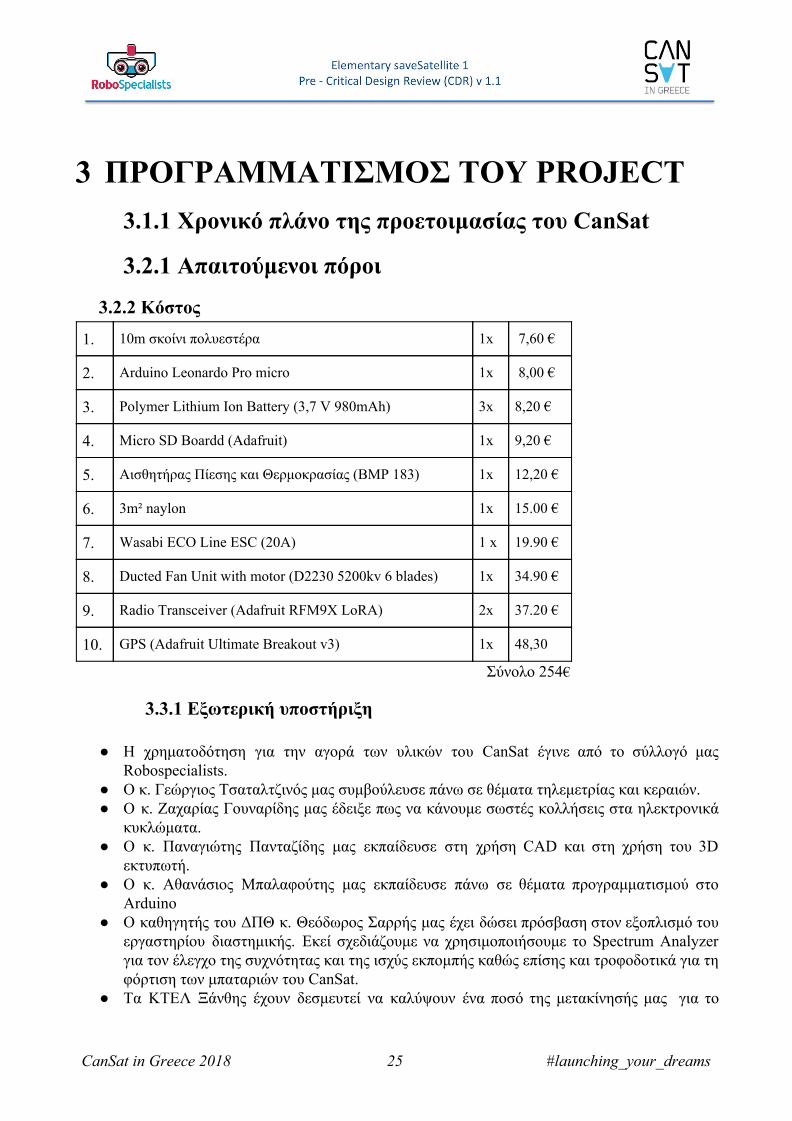
3.2.2 Κόστος
1. 10m σκοίνι πολυεστέρα 1x 7,60 €
2. Arduino Leonardo Pro micro 1x 8,00 €
3. Polymer Lithium Ion Battery (3,7 V 980mAh) 3x 8,20 €
4. Micro SD Boardd (Adafruit) 1x 9,20 €
5. Αισθητήρας Πίεσης και Θερμοκρασίας (BMP 183) 1x 12,20 €
6. 3m² naylon 1x 15.00 €
7. Wasabi ECO Line ESC (20A) 1 x 19.90 €
8. Ducted Fan Unit with motor (D2230 5200kv 6 blades) 1x 34.90 €
9. Radio Transceiver (Adafruit RFM9X LoRA) 2x 37.20 €
10. GPS (Adafruit Ultimate Breakout v3) 1x 48,30
Σύνολο 254€
3.3.1 Εξωτερική υποστήριξη
● Η χρηματοδότηση για την αγορά των υλικών του CanSat έγινε από το σύλλογό μας Robospecialists.
● Ο κ. Γεώργιος Τσαταλτζινός μας συμβούλευσε πάνω σε θέματα τηλεμετρίας και κεραιών. ● Ο κ. Ζαχαρίας Γουναρίδης μας έδειξε πως να κάνουμε σωστές κολλήσεις στα ηλεκτρονικά
κυκλώματα. ● Ο κ. Παναγιώτης Πανταζίδης μας εκπαίδευσε στη χρήση CAD και στη χρήση του 3D
εκτυπωτή. ● Ο κ. Αθανάσιος Μπαλαφούτης μας εκπαίδευσε πάνω σε θέματα προγραμματισμού στο
Arduino ● O καθηγητής του ΔΠΘ κ. Θεόδωρος Σαρρής μας έχει δώσει πρόσβαση στον εξοπλισμό του
εργαστηρίου διαστημικής. Εκεί σχεδιάζουμε να χρησιμοποιήσουμε το Spectrum Analyzer για τον έλεγχο της συχνότητας και της ισχύς εκπομπής καθώς επίσης και τροφοδοτικά για τη φόρτιση των μπαταριών του CanSat.
● Τα ΚΤΕΛ Ξάνθης έχουν δεσμευτεί να καλύψουν ένα ποσό της μετακίνησής μας για το
CanSat in Greece 2018 25 #launching_your_dreams
τελικό του διαγωνισμού.
3.4.1 Πλάνο δοκιμών Για τον έλεγχο των λειτουργιών του συστήματος ανάκτησης και του μηχανισμού της δευτερεύουσας αποστολής πραγματοποιήσαμε τα παρακάτω:
3.4.2 Δοκιμές για την πρωτεύουσα αποστολή.
➢ Για το αλεξίπτωτο:
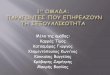
Η μορφή και το μέγεθος του αλεξιπτώτου αποτελούν τις καθοριστικές εκείνες παραμέτρους που επηρεάζουν-ελέγχουν την ταχύτητα πτώσης του CanSat. Με μοναδικό σταθερό δεδομένο το μέγιστο μέγεθος του αλεξιπτώτου όταν είναι διπλωμένο - προκειμένου να χωράει στο κέλυφος του CanSat - και την αδυναμία να υπολογιστούν με ακρίβεια ορισμένες μεταβλητές που μετέχουν στην τελική ταχύτητα της πτώσης του CanSat, έπρεπε να στηριχθούμε σε πειραματικά δεδομένα - και άρα πολλές δοκιμές. Για αυτό τον λόγο, προκειμένου να καταλήξουμε στην τελική μορφή του αλεξίπτωτου, κατασκευάσαμε τρία διαφορετικής μορφής αλεξίπτωτα ώστε να διαπιστώσουμε ποιο σχέδιο ανταποκρίνεται καλύτερα στις ανάγκες μας. Οι δοκιμές αυτές έγιναν με τη βοήθεια ενός τηλεκατευθυνόμενου αεροπλάνου (drone). Το CanSat υψώθηκε στα 200 μέτρα και εκεί αφέθηκε ελεύθερο. Με αυτό τον τρόπο προσομοιώθηκαν συνθήκες ανάλογες του διαγωνισμού και συλλέξαμε στοιχεία αναφορικά με τη συμπεριφορά των διαφορετικών μορφών αλεξιπτώτου.
Ο πίνακας που ακολουθεί σχεδιάστηκε στο EXCEL και χρησιμοποιήθηκε για τον υπολογισμό του εμβαδού του αλεξιπτώτου και επομένως της ταχύτητας του. (Οι τιμές που εμφανίζονται στον πίνακα είναι ενδεικτικές).
CanSat in Greece 2018 26 #launching_your_dreams
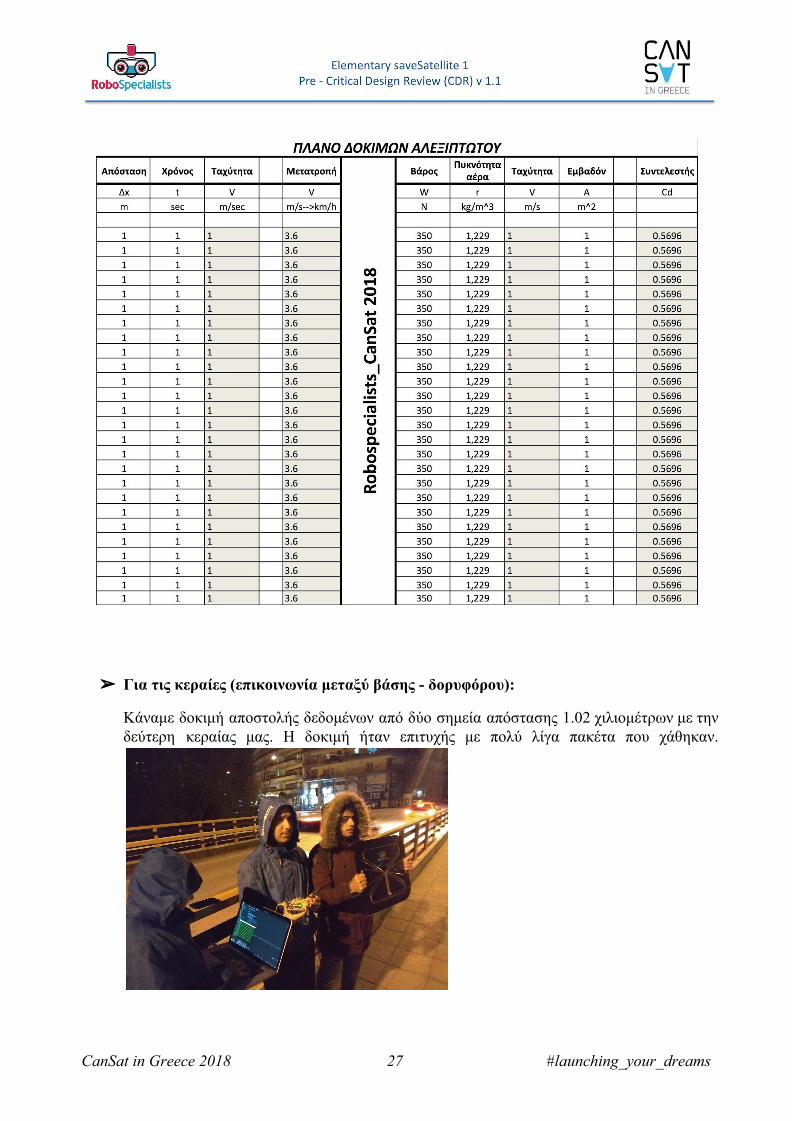
➢ Για τις κεραίες (επικοινωνία μεταξύ βάσης - δορυφόρου):
Κάναμε δοκιμή αποστολής δεδομένων από δύο σημεία απόστασης 1.02 χιλιομέτρων με την δεύτερη κεραίας μας. Η δοκιμή ήταν επιτυχής με πολύ λίγα πακέτα που χάθηκαν.
CanSat in Greece 2018 27 #launching_your_dreams
➢ Για τη θερμοκρασία και την πίεση (BMP):
Για να εξασφαλίσουμε ότι ο αισθητήρας μέτρησης, πίεσης και θερμοκρασίας λειτουργεί κανονικά δοκιμάσαμε να πάρουμε δεδομένα σε όλων των ειδών τις καταστάσεις. (π. χ. σε διάφορες θερμοκρασίες, διάφορες ημέρες και σε διάφορες περιοχές, τόσο σε κλειστούς όσο και σε ανοιχτούς χώρους, ώστε να διαφοροποιείται η πίεση).
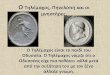
το παρακάτω διάγραμμα αποτυπώνει την μεταβολή της πίεσης στο πέρασμα του χρόνου (οι τιμές είναι ενδεικτικές.)
CanSat in Greece 2018 28 #launching_your_dreams
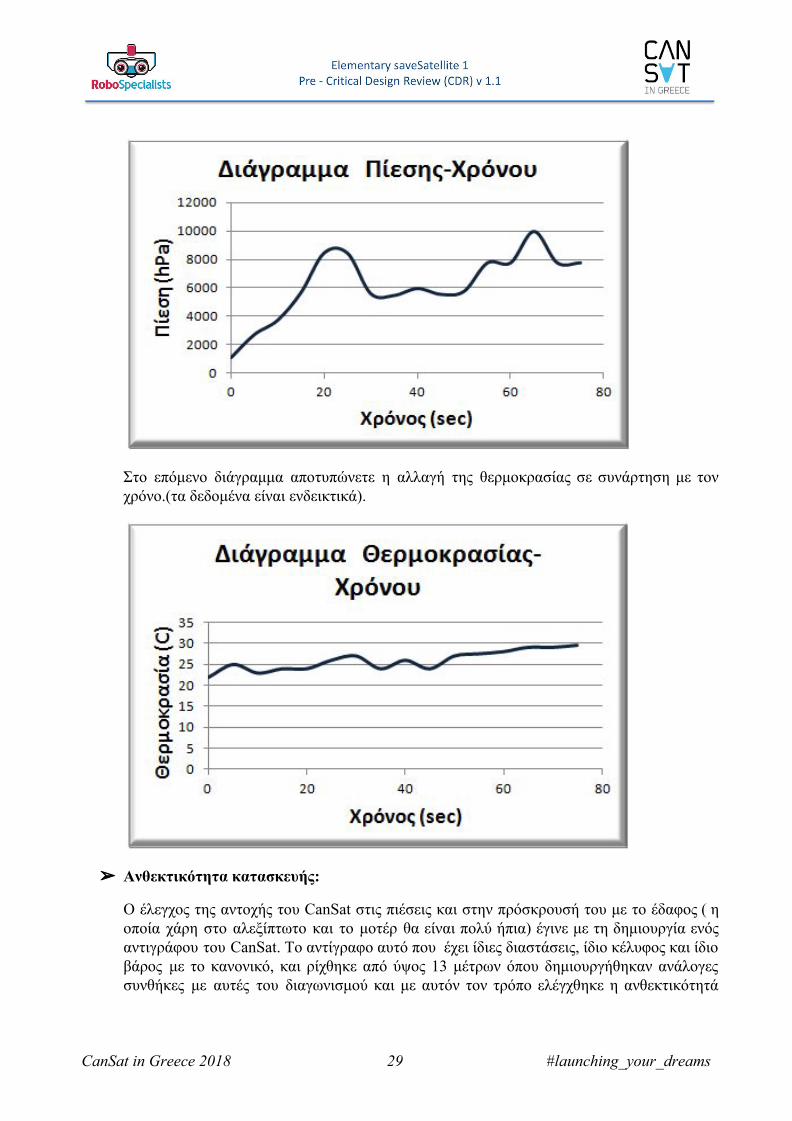
Στο επόμενο διάγραμμα αποτυπώνετε η αλλαγή της θερμοκρασίας σε συνάρτηση με τον χρόνο.(τα δεδομένα είναι ενδεικτικά).
➢ Ανθεκτικότητα κατασκευής:
Ο έλεγχος της αντοχής του CanSat στις πιέσεις και στην πρόσκρουσή του με το έδαφος ( η οποία χάρη στο αλεξίπτωτο και το μοτέρ θα είναι πολύ ήπια) έγινε με τη δημιουργία ενός αντιγράφου του CanSat. Το αντίγραφο αυτό που έχει ίδιες διαστάσεις, ίδιο κέλυφος και ίδιο βάρος με το κανονικό, και ρίχθηκε από ύψος 13 μέτρων όπου δημιουργήθηκαν ανάλογες συνθήκες με αυτές του διαγωνισμού και με αυτόν τον τρόπο ελέγχθηκε η ανθεκτικότητά
CanSat in Greece 2018 29 #launching_your_dreams
του. Το crush test αυτό επέφερε βελτιώσεις που εφαρμόστηκαν στο τελικό CanSat.
➢ Για το GPS:
Η εξακρίβωση της σωστής λειτουργίας του GPS έγινε με δόκιμες σε διάφορες τοποθεσίες, με διαφορετικό υψόμετρο, σε διάφορες καιρικές συνθήκες (π. χ. σε βροχή, αέρα,). Οι τιμές που λάβαμε συγκρίθηκαν με τις αντίστοιχες ενός άλλου αξιόπιστου GPS .
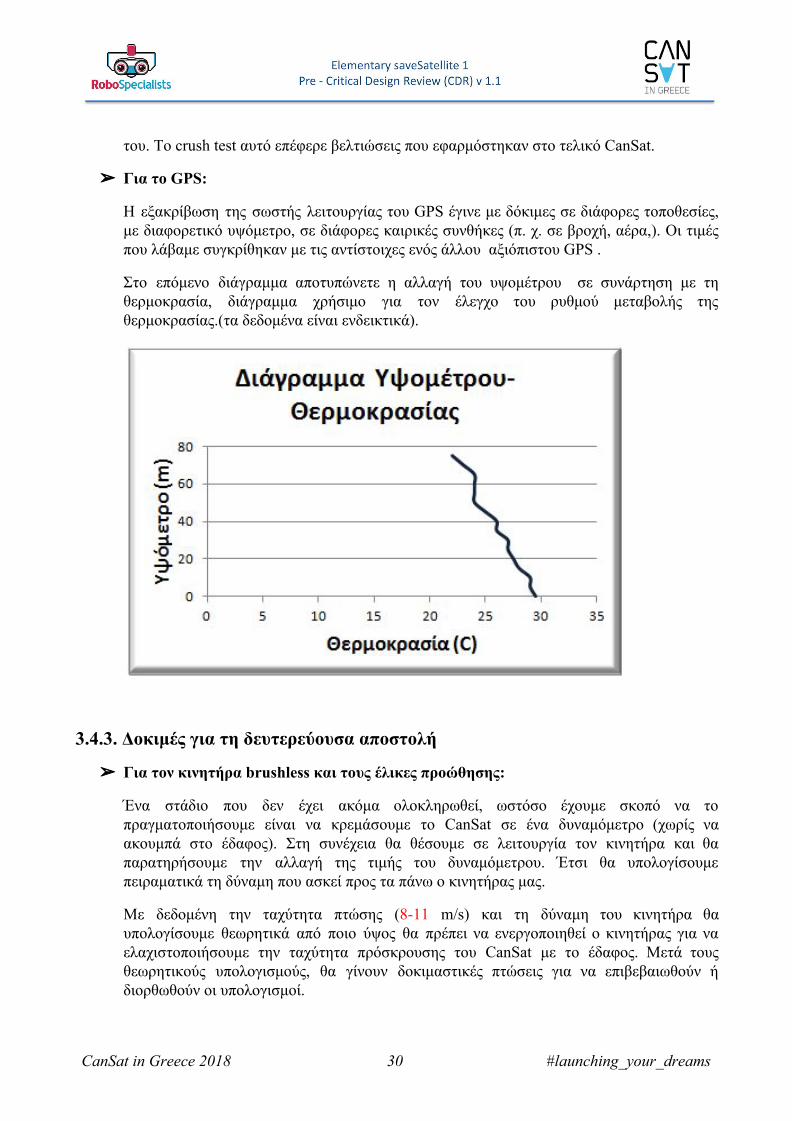
Στο επόμενο διάγραμμα αποτυπώνετε η αλλαγή του υψομέτρου σε συνάρτηση με τη θερμοκρασία, διάγραμμα χρήσιμο για τον έλεγχο του ρυθμού μεταβολής της θερμοκρασίας.(τα δεδομένα είναι ενδεικτικά).
3.4.3. Δοκιμές για τη δευτερεύουσα αποστολή
➢ Για τον κινητήρα brushless και τους έλικες προώθησης:
Ένα στάδιο που δεν έχει ακόμα ολοκληρωθεί, ωστόσο έχουμε σκοπό να το πραγματοποιήσουμε είναι να κρεμάσουμε το CanSat σε ένα δυναμόμετρο (χωρίς να ακουμπά στο έδαφος). Στη συνέχεια θα θέσουμε σε λειτουργία τον κινητήρα και θα παρατηρήσουμε την αλλαγή της τιμής του δυναμόμετρου. Έτσι θα υπολογίσουμε πειραματικά τη δύναμη που ασκεί προς τα πάνω ο κινητήρας μας.
Με δεδομένη την ταχύτητα πτώσης (8-11 m/s) και τη δύναμη του κινητήρα θα υπολογίσουμε θεωρητικά από ποιο ύψος θα πρέπει να ενεργοποιηθεί ο κινητήρας για να ελαχιστοποιήσουμε την ταχύτητα πρόσκρουσης του CanSat με το έδαφος. Μετά τους θεωρητικούς υπολογισμούς, θα γίνουν δοκιμαστικές πτώσεις για να επιβεβαιωθούν ή διορθωθούν οι υπολογισμοί.
CanSat in Greece 2018 30 #launching_your_dreams
3.5.1 ΠΛΑΝΟ ΠΡΟΩΘΗΣΗΣ
Το πλάνο προώθησής μας είναι το εξής: ● Έχουμε δημιουργήσει μια σελίδα στο Facebook, στο Intagram και μια δικιά μας ιστοσελίδα
στα οποία προσθέτουμε διάφορες φωτογραφίες, βίντεο και πληροφορίες σχετικά με το project αλλά και την εξέλιξή μας επάνω σε αυτό.
● Θα τυπώσουμε επάνω σε μπλουζάκια στάμπες από το logo της ομάδας αλλά και το Logo του CanSat in Greece.
● Κάναμε μια ενημέρωση σχετικά για το project στην ημερίδα του στρατού της Ξάνθης και παρουσιάσαμε κάποια μέρη της μέχρι στιγμής πορείας μας.
● Έχουμε δώσει συνέντευξη στο κανάλι Ε. ● Θα επικοινωνήσουμε με τους διευθυντές των σχολείων της πόλης μας για να μπορέσουμε
να κάνουμε μια ενημέρωση στους μαθητές . ● Αποφασίσαμε να αλλάξουμε τα σχέδιά μας για μια τελική εκδήλωση στην πλατεία της
Ξάνθης λόγω της στενότητας χρόνου. Αντί για αυτό μερικές μέρες πριν τον διαγωνισμό θα κάνουμε μια εκδήλωση με πτώση μέσω drone του δορυφόρου μας παρουσία της πλειοψηφίας των μαθητών του συλλόγου (150μαθητές)
● Στη Μαθητική ημερίδα “Η Μακεδονία συναντά τη γνώση” που έγινε παράλληλα με το 17ο συνέδριο φυσικής προώθησαμε τον διαγωνισμό CanSat σε έναν τεράστιο αριθμό συνέδρων και ερευνητών.
Το blog μας περιέχει πληροφορίες για την ομάδα μας και ανανεώνεται συστηματικά με οπτικοακουστικό υλικό που παρουσιάζει τη δουλειά μας μέχρι τώρα. Στο blog μας πρόκειται να αναρτηθούν πληροφορίες για τον διαγωνισμό αλλά και να συνεχίσουν οι αναρτήσεις οπτικοακουστικών υλικών.
1. Facebook Youtube Blog Instagram
https://www.facebook.com/elementarysavesatellite/?fref=mentions https://www.youtube.com/channel/UCje6-xtib9zILGGEzm1wr8w https://robospecialists.wixsite.com/cansat https://www.instagram.com/elementarysavesatellite 1/
2. Άρθρα σε ενημερωτικές ιστοσελίδες
http://www.alfavita.gr/arthron/koinonia/mathites-apo-tin-xanthi-tha-ektoxeysoyn-doryforo https://www.newsit.gr/topikes-eidhseis/anatoliki-makedonia-kai-thraki/ton
CanSat in Greece 2018 31 #launching_your_dreams
-diko-tous-mikrodoryforo-sxediazoun-na-ektokseysoun-mathites-tis-ksanthis/2345521/ http://www.dimokratianews.gr/content/81710/xanthiotes-mathites-tha-ektoxeysoyn-mikrodoryforo https://www.parapolitika.gr/article/enan-mikrodoriforo-etimazonte-na-ektoxefsoun-mathites-sti-xanthi http://www.robospecialists.gr/?p=597
3. Συνέντευξη στο κανάλι Epsilon
https://www.facebook.com/915159145200188/videos/1495264083856355/
4. Αναφορά πάνω στην ομάδα στην κοπή πίτας του συλλόγου
http://maxitisthrakis.blogspot.gr/2018/01/robospecialists.html?m=1
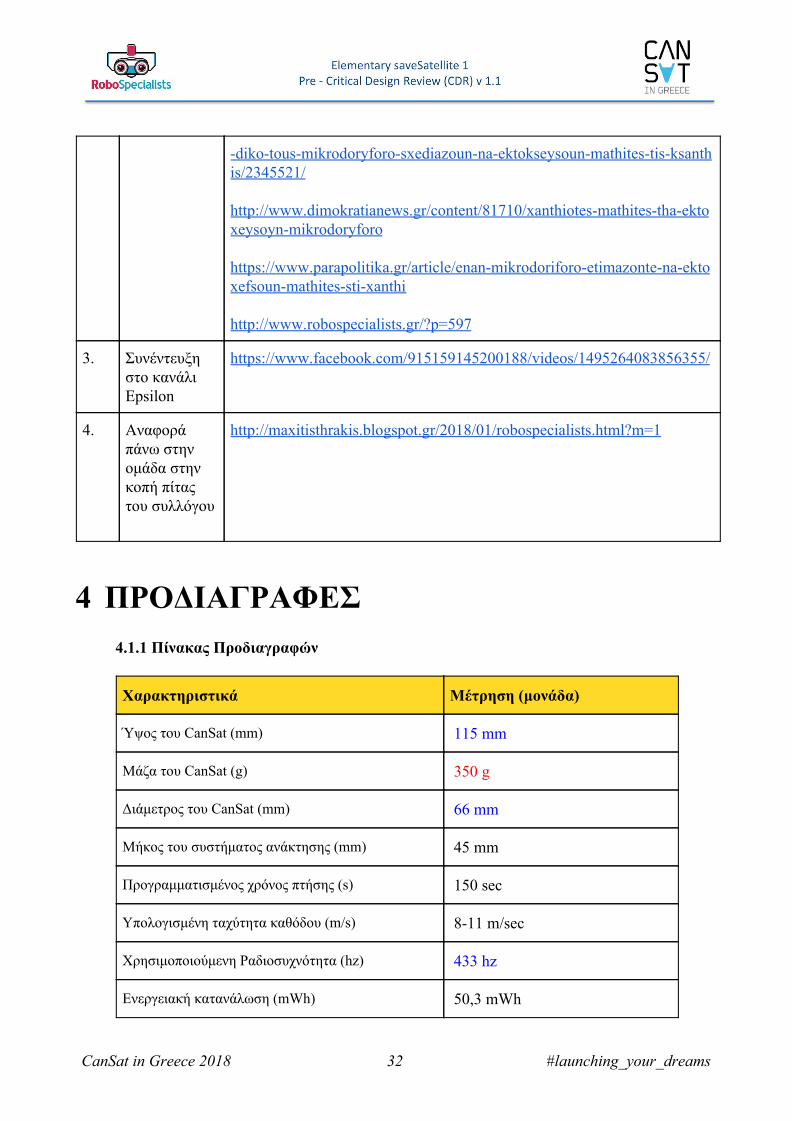
4 ΠΡΟΔΙΑΓΡΑΦΕΣ 4.1.1 Πίνακας Προδιαγραφών
Χαρακτηριστικά Μέτρηση (μονάδα)
Ύψος του CanSat (mm) 115 mm
Μάζα του CanSat (g) 350 g
Διάμετρος του CanSat (mm) 66 mm
Μήκος του συστήματος ανάκτησης (mm) 45 mm
Προγραμματισμένος χρόνος πτήσης (s) 150 sec
Υπολογισμένη ταχύτητα καθόδου (m/s) 8-11 m/sec
Χρησιμοποιούμενη Ραδιοσυχνότητα (hz) 433 hz
Ενεργειακή κατανάλωση (mWh) 50,3 mWh
CanSat in Greece 2018 32 #launching_your_dreams
Συνολικό κόστος (€) 186,1 €
Εκ μέρους της ομάδας επιβεβαιώνω ότι το CanSat μας πληροί όλες τις προδιαγραφές οι οποίες θεσπίστηκαν για τον διαγωνισμό CanSat in Greece 2018 στις επίσημες Οδηγίες Συμμετοχής. Υπογραφή, τόπος, ημερομηνία Γουναλάκης Παύλος Ξάνθη
CanSat in Greece 2018 33 #launching_your_dreams