336
2.28 Selective, Override, and Limit Controls
F. G. SHINSKEY (1970) J. P. SHUNTA (1985, 1995) J. E. JAMISON,
A. ROHR (2005)
INTRODUCTION
In this section some examples are given of control
configu-rations where more than one controller can manipulate
thesame process and where the selection of the active controlleris
dictated by some prearranged logic.
In some control systems, more variables need to be con-trolled
than there are variables that can be manipulated. Whenthis is the
case, logic must be provided to decide whichcontrollers should have
access to the manipulated variablesand which should be temporarily
blocked. Switching control-ler outputs can be easily and smoothly
accomplished by avariety of hardware and software signal
selectors.
In selective control applications, the signal selectorschoose
the lowest, highest, or median signal from among twoor more
signals. Such selectors are available both as analoghardware or as
digital software in DCS control packages.
In most applications, selective control is a form of
mul-tivariable control where the selectors facilitate the
onlinemodification of control strategies as a function of
changingoperating conditions. The selectors allow the control
strate-gies to be changed smoothly and without disturbing the
pro-cess. Selective control applications include:
Protecting process equipment by keeping operatingvariables
within their design limits
Automatic startup and shutdown Protection against instrument
failures Selection of one from among several signals
OVERRIDES
In override configurations one controller can take commandof a
manipulated variable away from another controller whenotherwise the
process would exceed some process or equip-ment limit or
constraint.
Selective control is less abrupt than the use of
interlocks,which usually shut down equipment in order to avoid
exceed-ing a limit or constraint. Overrides usually keep some
processvariable from reaching an unsafe condition, and therefore
theinterlock trip points are not reached. Thus, selective
controlkeeps the equipment running although perhaps at a
subopti-mal level.
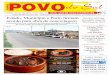
This concept is illustrated in Figure 2.28a. The hardconstraint
denotes the point at which the interlock trips.Overrides come into
play at some point before the inter-locks are actuated and
therefore are sometimes called softconstraints.
Signal selectors can facilitate the overriding of one
control-ler by another. Often, overrides are preferable and
therefore areactivated before the safety interlocks would be, but
in mostapplications the overrides are backed up by interlocks.
Overridescan be defined as:
Controllers that remain inactive until a constraint is aboutto
be reached or exceeded, at which point they take overcontrol of the
manipulated variable from the normal con-troller through a selector
and thereby prevent the exceed-ing of that constraint.
Some common applications of override include theprevention
of:
Flooding in distillation columns, by throttling boil-upor feed
flow rates
Exceeding level ranges by draining or flooding High pressure or
temperature caused by a runaway
reaction when heat input is reduced The development of low
oxygen levels in furnace off-gas
streams, by reducing fuel flow
FIG. 2.28aIllustration of the nature of hard and soft
constraints. Aninterlock is a hard constraint because it usually
shuts down theprotected equipment, while selective overrides are
called softbecause they keep the process variable from reaching
such hardlimits.
Soft constraint
Normal operatingrange
Interlocktrip point
Overridesetpoint
Varia
ble
Hard constraint
2006 by Bla Liptk
2.28 Selective, Override, and Limit Controls 337
The development of high steam header pressures, bydiverting some
of the steam to a low-pressure headeror condenser
Figure 2.28b shows an override control loop in whichthe normal
control maintains flow (FIC) while the safety over-ride control is
based on pressure (PIC). In this configuration,the outputs of both
controllers are fed to a low-signal selector,which selects the
lower of the two. The override controller setpoint is set at the
maximum steam pressure that the process cantolerate, but below the
safety interlock set point.
As long as the pressure controller set point is not exceeded,the
output of the override PIC controller (signal A) is blockedby the
low selector and cannot reach the steam valve. Whenthe pressure of
the steam that is being sent to the users exceedsthe set point of
the override PIC, that controllers output signaldecreases, and when
it drops below the flow controllers output,it is selected for
throttling the steam control valve. This way,the PIC override will
prevent the steam pressure from risingabove the controllers set
point.
Both the FIC and the PIC control algorithms requireexternal
reset feedback to avoid integrating their errorswhen they are idle
(reset windup), because their output isnot selected for control. As
was discussed in more detail inSection 2.2, the controllers do not
receive their own outputsignal as reset feedback, but both of them
receive the signalselected by the low signal selector (FY). This
makes thetransfer between the controllers bumpless.
Overriding at a Fixed Point
Figure 2.28b illustrates the case when the override
variable(steam pressure) had to be limited to a specific value.
Anotherexample of this type of application is shown in Figure
2.28c,where the controls involve cooling with river water. In
thisapplication the concern is heat exchanger fouling because ifthe
water outlet temperature exceeds 50C, exchanger foulingbecomes
rapid.
Normally, the river water flow is throttled to control
thecondensate temperature by TIC-1. However, if the river
water outlet temperature reaches or exceeds 50C, the
high-temperature override controller (TIC-2) takes over the
con-trol of the flow of river water and opens the control
valve.This limits the river water outlet temperature to a maximumof
50C. As a consequence, the condensate temperature willdrop below
the set point of TIC-1, but the fouling of the heatexchanger will
be prevented, and that is the higher priority.
Figure 2.28d describes a control system that protectsagainst
overpressurizing a reactor. This protection is providedby
overriding the temperature controls and reducing the heatinput. In
this application a cascade loop throttles the steamflow and
controls the reactor temperature if the pressure inthe reactor is
safe. On the other hand, when the overheadcondenser becomes
overloaded and its capacity to condensethe overhead vapors is
insufficient for the rate at which thevapors are generated, the
reactor pressure will rise. The pres-sure controller (PC) provides
the high pressure override bytaking command of the steam valve
(through the low signal
FIG. 2.28bFlow control with pressure override limits the steam
pressure to a safe value. Both controllers are provided with
external feedback (EF)to prevent reset windup and thereby guarantee
bumpless transfer.
Normal controller
SP
EF EF
Override controller
SP
FIC
FT
PIC PT
Steamflow
A/O - air to openA/O
ASteam
pressure atcontrolling
user
Interlock > SPoperating press < SP
FY
![H20youryou[2] · 2020. 9. 1. · 65 pdf pdf xml xsd jpgis pdf ( ) pdf ( ) txt pdf jmp2.0 pdf xml xsd jpgis pdf ( ) pdf pdf ( ) pdf ( ) txt pdf pdf jmp2.0 jmp2.0 pdf xml xsd](https://img.pdfslide.tips/doc/110x75/60af39aebf2201127e590ef7/h20youryou2-2020-9-1-65-pdf-pdf-xml-xsd-jpgis-pdf-pdf-txt-pdf-jmp20.jpg)