Embed Size (px)
Citation preview

28
CARACTERÍSTICAS GEOMETRICAS DE SUPERFICIES PLANAS
1 –CENTRÓIDES E BARICENTROS
1.1 – Introdução
Freqüentemente consideramos a força peso dos corpos como cargas concentradas
atuando num único ponto, quando na realidade o que se passa é que o peso é uma força
distribuída, isto é, cada pequena porção de matéria tem o seu próprio peso. Esta
simplificação pode ser feita se aplicarmos a força concentrada num ponto especial
denominado Baricentro. Este ponto deve ter uma distribuição de matéria homogênea em
torno de si. Terá importância também a determinação de um ponto de uma superfície e não
somente de um corpo tridimensional que terá uma distribuição homogênea de área em torno
de si. A este ponto especial chamaremos de Centróide (ou Centro de Gravidade – CG).
Demonstra-se que as coordenadas deste ponto serão obtidas, no caso geral,
tomando-se um elemento de área dA e partindo do centróide deste elemento (xel; yel)
fazemos a integração em toda a área A.
x
y
xel
yel
x
y

29
As coordenadas deste ponto serão:
∫∫ ⋅
=dA
dAxx el__
∫
∫ ⋅=
dA
dAyy el__
A integral ∫ dAx é conhecida como Momento Estático de 1a Ordem ou Momento
Estático de Área em relação ao eixo y. Analogamente, a integral ∫ dAy define o Momento
Estático de 1a Ordem ou Momento Estático de Área em relação ao eixo x.
1.2 – Determinação do Centróide
a – Por Integração
Escolha do elemento de área – pode-se escolher qualquer elemento de área para o
cálculo do CG. A resolução da maior parte dos problemas será possível com elemento de
área em forma de uma faixa retangular ou um setor circular. Ex.:
Retângulo
x
y
xel
b
h
dx

30
∫∫ ⋅
=dA
dAxx el__
xel = x e dA = y ⋅ dx
2b
x b1
2b
xh
2x
h
dxh
dxhx
dxy
dxyx
x__2
b0
b
0
2
b
0
b
0b
0
b
0__
=→⋅=⋅
⋅
=
⋅
⋅⋅
=
⋅
⋅⋅
=
∫
∫
∫
∫
∫∫ ⋅
=dA
dAyy el__
yel = y e dA = x ⋅ dy
2h
y h1
2h
yb
2y
b
dyb
dyby
dyx
dyxy
y__2
h0
h
0
2
h
0
h
0h
0
h
0__
=→⋅=⋅
⋅
=
⋅
⋅⋅
=
⋅
⋅⋅
=
∫
∫
∫
∫
Portanto, para o retângulo temos:
x
y
yel
b
h
dy

31
A partir destes resultados, toda vez que utilizarmos um elemento de área em forma
de faixa retangular colocaremos:
2b
xel = e 2b
xel =
b – Por Composição de Figuras
Muitas figuras são resultantes de soma ou diferença de outras figuras conhecidas e
para estas há um segundo método para se determinar o CG. Ex.:
x
y
b
h
h/2
h/2
b/2 b/2
CG
100mm
60mm
120mm
x
y

32
Notamos que a figura resultante pode ser obtida pela soma de um retângulo com um
triângulo ou pela diferença de um outro retângulo e um triângulo. Faremos a opção pela
soma.
Observamos que o CG de cada figura (retângulo e triângulo) já são conhecidos, pois
foram obtidos por integração. Contudo, Estas coordenadas devem ser tomadas em relação à
origem do sistema dado.
Como trata-se de soma de figuras conhecidas, as integrais dA xel∫ , dA yel∫ e
∫dA se tornam Ax__
∑ , Ay__
∑ e ∑A .
Figura __x
__y A Ax
__ Ay
__
Retângulo 60 110 12000 720000 1320000 Triângulo 40 40 3600 144000 144000
∑ 15600 864000 1464000
55,38mm15600864000
AAx
x
____
===∑∑ 93,85mm
156001464000
AAy
y
____
===∑∑
1.3 – Aplicações do Cálculo do CG
Teoremas de Pappus-Guldinus: para a aplicação dos teoremas torna-se necessário
definirmos:
Superfície de revolução: é uma superfície que pode ser gerada pela rotação de uma
curva plana em torno de um eixo dado.
Corpo de revolução: é um corpo que pode ser gerado pela rotação de uma área
plana em torno de um eixo fixo.
Curva plana (reta) Superfície de revolução – casca do cone

33
Teorema I: a área de uma superfície de revolução é igual ao comprimento da curva
geratriz, multiplicada pela distância percorrida pelo centróide da curva durante a geração da
superfície.
Teorema II: o volume de um corpo de revolução é igual à área geratriz, multiplicada
pela distância percorrida pelo centróide da área durante a geração do corpo.
1.4 – Centróide de um Corpo Tridimensional
Analogamente ao que foi feito para áreas planas, a determinação do Centróide de
um Corpo Tridimensional pode ser obtida pelas expressões:
∫∫ ⋅
=dV
dVxx__
∫∫ ⋅
=dV
dVyy__
e ∫∫ ⋅
=dVdVz
z__
Para corpos homogêneos, isto é, os que possuem peso específico constante, o
Centróide coincide com o Baricentro. Relembremos que Centróide é um ponto com
distribuição de volume homogênea em torno de si (do ponto de vista geométrico) e
Baricentro é um ponto com distribuição homogênea de massa em torno de si (ponto onde
deve situar a força peso, que sozinha substitui o peso distribuído de cada porção de
matéria).
A integral ∫ ⋅ dVx é conhecida como Momento Estático ou Momento de Primeira
Ordem de Volume em relação ao plano yz. Analogamente, ∫ ⋅ dVy com em relação a xz
e ∫ ⋅ dVz em relação a xy.
Área plana (triângulo) Corpo (cone)

34
No cálculo de centróide de áreas pudemos observar que figuras com eixo de
simetria possuíam o CG sobre este eixo. O mesmo se aplica para o CG de corpos
tridimensionais. Desta forma é imediato o CG de esferas, elipsóides, cubos,
paralelepípedos, etc.
Semelhante ao que foi feito para as áreas, há dois métodos para determinar o CG de
volumes: por Integração e Composição de Corpos.
35
Lista de Exercícios
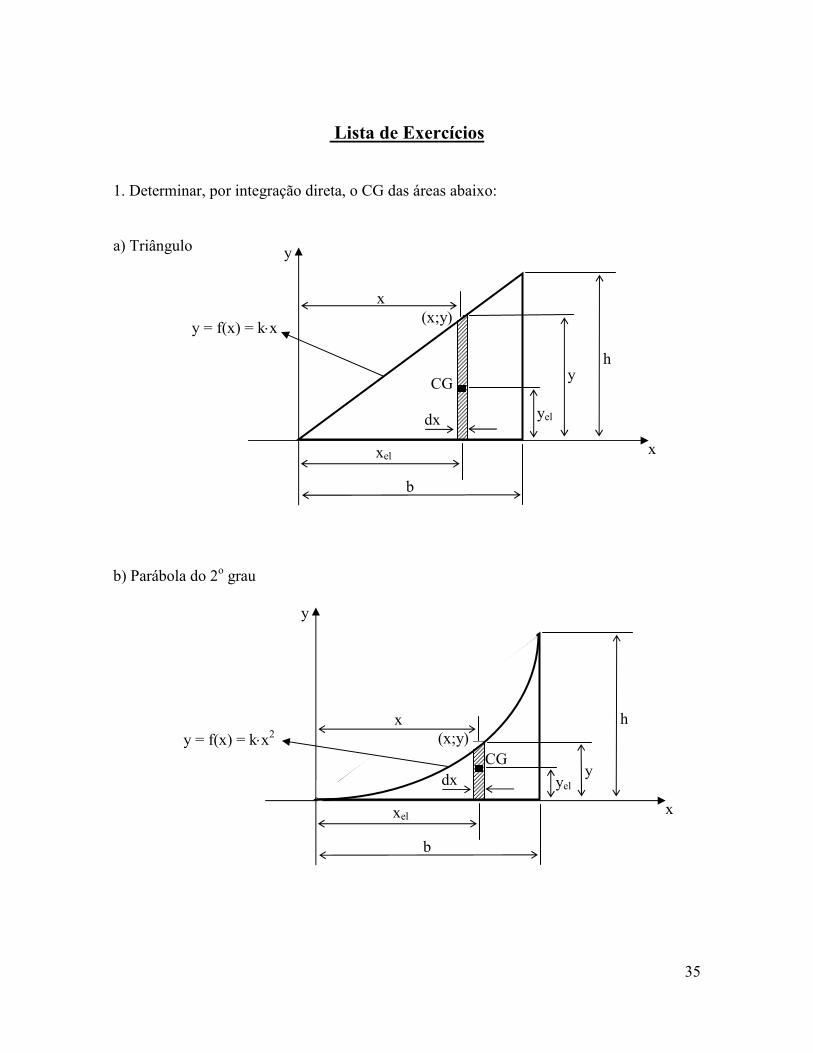
1. Determinar, por integração direta, o CG das áreas abaixo:
a) Triângulo
b) Parábola do 2o grau
x
y
xel
b
h
dx
y
yel
x (x;y)
y = f(x) = k⋅x
CG
x
y
xel
b
h
dx y yel
x (x;y) y = f(x) = k⋅x2
CG

36
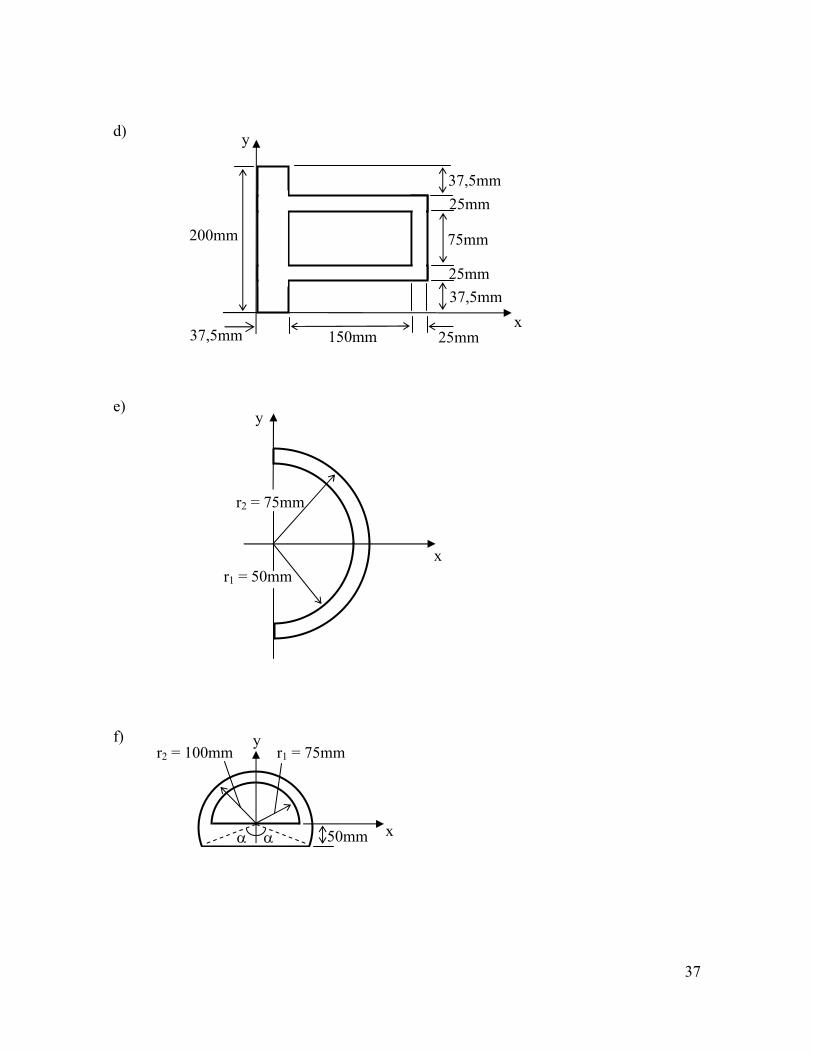
2. Determinar, por composição de figuras, o CG das áreas abaixo:
a)
b)
c)
120mm
100mm
60mm
x
y
100mm
75mm
12,50mm
12,50mm
x
y
200mm
300mm r = 100mm
x
y
37
d)
e)
f)
r1 = 50mm
r2 = 75mm
x
y
200mm
150mm
75mm
25mm
25mm
25mm 37,5mm
37,5mm
37,5mm
x
y
50mm
r2 = 100mm r1 = 75mm
α α x
y

38
g)
3. Um cone e um cilindro de mesmo raio a e altura h estão unidos como ilustrado abaixo.
Determine a posição do centróide do corpo.
r1 = 250mm
r2 = 200mm 100mm
x
y
h
h
a

39
2. Momento de Inércia de Figuras Planas
No desenvolvimento da expressão da tensão Normal no estudo da flexão, surgem as
integrais dSy2 ⋅∫ e dSz2 ⋅∫ chamadas de Momento Estático de 2a ordem ou
Momento de Inércia. Estudaremos o desenvolvimento e expressões finais dessas integrais
para as figuras mais comuns.
Momento de Inércia é uma grandeza que mede a resistência que uma determinada
área oferece quando solicitada ao giro em torno de um determinado eixo. Normalmente
representamos pelas letras I e J. Assim a resistência que a Figura 1 oferece ao giro em torno
do eixo z é representada por dSyJ 2z ⋅= ∫ e em torno do eixo y é representada por
dSzJ 2y ⋅= ∫ , onde dS é um elemento de área da Figura 5.1, z é a distância do elemento
de área ao eixo y e y é a distância do elemento de área ao eixo z.
Da mesma maneira que fizemos para os Momentos Estáticos de 1a ordem (cálculos
de Centro de Gravidade), desenvolveremos as integrais para as figuras comuns, retângulo,
triângulo, parábola e círculo. A escolha do elemento de área adequado facilita a resolução
das integrais. Deve-se utilizar um elemento de área que eqüidiste do eixo em torno do qual
se calcula o Momento de Inércia.
z
y z
y
O
dS S

40
• Retângulo
3bh
J3z
hdzhzdSzJ3
y
b
0
3b
0
22y
⋅=⇒⋅=⋅⋅=⋅= ∫ ∫
3hb
J3y
bdybydSyJ3
z
h
0
3h
0
22z
⋅=⇒⋅=⋅⋅=⋅= ∫ ∫
• Triângulo
z
y
z b
h
dz
dS = h⋅dz
z
y
y
b
h
dy dS = b⋅dy
( )hy-h
z b
zbh
hy⋅
=→⋅−=
b
h dy
y
y
z
dS = z⋅dy
( )hy-h
z b
zbh
hy⋅
=→⋅−=
b
h
y
dz
z
dS = y⋅dz
z

41
( )12
hbJ
4hyb
3yb
dyh
yhbydSyJ
3
z
h
0
43h
0
22z
⋅=⇒
⋅−
⋅=⋅
−⋅=⋅= ∫∫
12bh
J 4b
zh3zh
dzzbh
hzdSzJ3
y
b
0
43b
0
22y
⋅=⇒
⋅−
⋅=⋅
−⋅=⋅= ∫∫
2.1. Teorema dos Eixos Paralelos
Freqüentemente necessitamos do momento de inércia de uma área em relação a um
eixo qualquer (este eixo será qualquer para a figura em si, mas especial para a seção da qual
a referida figura faz parte). para evitar o cálculo constante de integrais, desenvolveremos
uma expressão para o cálculo do momento de inércia em relação a este eixo qualquer a
partir do valor do momento de inércia em relação a outro eixo, já conhecido.
( ) dSd'ydSyJ22
AA ⋅+=⋅= ∫ ∫
∫∫ ∫ ⋅+⋅⋅+⋅= dSddS'yd2dS'yJ 22AA
A integral ∫ ⋅dS'y 2 já é conhecida. Como o eixo BB é o horizontal que contém o
CG, esta integral é chamada Jz.
A integral ∫ ⋅dS'y é igual a zero pois refere-se ao CG.
A integral ∫dS resulta a área S.
Portanto:
SdJJ 2BBAA ⋅+=
CG
A A
B B
dS
d
y '
y

42
Sendo d a distância de eixo a eixo.
Para eixos horizontais teremos:
SdJJ 2zz CG
⋅+=
SdJJ 2yy CG
⋅+=
• Retângulo
12
43hb
323
2 hbJhb
hJSdJJ
CGCGCG zzzz⋅
=⇒⋅⋅+=⋅
→⋅+=
12
43
3232 bh
Jhbb
Jbh
SdJJCGCGCG yzyy
⋅=⇒⋅⋅+=
⋅→⋅+=
• Tritângulo
h
b/2 b/2
b
CG
z
y
h h/2
h/2
b
CG
z
y
h
b h/3
2h/3
CG z
y

43
36
2912hb
323
2 hbJ
hbhJSdJJ
CGCGCG zzzz⋅
=⇒⋅
⋅+=⋅
→⋅+=
36
2912
3232 bh
Jhbb
Jbh
SdJJCGCGCG yzyy
⋅=⇒
⋅⋅+=
⋅→⋅+=
3. Momento Polar de Inércia
No estudo da torção em peças cilíndricas terá grande importância a integral
∫ ⋅dSr 2, que é chamada de Momento Polar de Inércia. É utilizada quando houver
solicitação em torno de um eixo (na seção estudada teremos um ponto = Pólo).
Temos que:
( ) dSyzdSr JJ 222p0 ⋅+=⋅== ∫∫
dSydSz JJ 22p0 ⋅+⋅== ∫∫
h
b
b/3 2b/3
CG z
y
dS
y
y
z
z
r

44
yzp0 JJ JJ +==
A terceira figura importante para a qual precisamos dos valores dos Momentos de
Inércia é o Círculo. A dedução mais simples é a de J0.
dSu JJ 2p0 ⋅== ∫
duu2πdS ⋅⋅=
duu2πuJr
0
20 ⋅⋅⋅= ∫
duu2πJr
0
30 ⋅⋅= ∫
2r π
JJ4
p0 ==
Em função da simetria, podemos concluir que para o círculo os valores de Jz e Jy são
iguais. Como o ponto O é o encontro dos eixos z e y, teremos:
yz0 JJJ +=
Jz2JJ2rπ
yz
4
⋅=+=⋅
(pois Jz = Jy)
Portanto, para o círculo teremos:
4r π
J4
z = 4r π
J4
y = 2r π
JJ4
p0 ==
Ou, escrevendo em função do diâmetro:
r
u
du
z
y

45
64d π
J4
z = 64d π
J4
y = 32d π
JJ4
p0 ==
Figuras Circulares
222 ryz =+
θsen ry ⋅=
θ cosrz ⋅=
dyz2dS ⋅⋅=
dθθ cosrdy ⋅⋅=
dyz2y dSy J 22z ⋅⋅⋅=⋅= ∫∫
∫ ⋅⋅⋅⋅⋅⋅⋅= dθθ cosrθ cosr2θsenr J 22z
dθθcos θsen r2 J 2--
--
24z ⋅⋅⋅⋅= ∫ ⇒ dθθcos θsen r2 J 2
--
--
24z ⋅⋅⋅⋅= ∫
−−
−−
−⋅⋅=32
sen4θ8θ
r2 J 4z
Para descrever o círculo θ deve variar de 2π
− a 2π
+ .
−−⋅⋅=16π
16π
r2 J 4z ⇒
4r π
J4
z =
Para o semi-círculo θ deve variar de θ a 2π
+ . Então 8r π
J4
z =
r
z
y
dS (z ; y)
θ

46
Para o quarto de círculo θ deve variar de 0 a 2π
+ e o elemento de área deve
ser dyzdS ⋅= . Então 16
r πJ
4
z =
Resumindo teremos:
64d π
4r π
JJ44
yz ===
128
d π8r π
JJ44
yz ===
256
d π16
r πJJ
44
yz ===
3.1. Teorema dos Eixos Paralelos
• Círculo: os valores obtidos já são em relação aos eixos que passam pelo Centro de
Gravidade.
• Semi-Círculo:
SdJJ 2CGzz ⋅+=
2r π
π3r4
J8r π 22
CGz
4
⋅
⋅+=
z
y
z
y
z
y

47
44CGz r0,1097569
π98
8π
rJ ⋅=
−=
• Quarto de Círculo:
SdJJ 2CGzz ⋅+=
4r π
π3r4
J16
r π 22
CGz
4
⋅
⋅+=
44CGz r0,0548784
π94
16π
rJ ⋅=
−=
4. Produto de Inércia
É definido com a integral ∫ ⋅⋅ dSyz obtida multiplicando-se cada elemento de
área dS de uma área S por suas coordenadas z e y em relação aos eixos coordenados z e y e
integrando sobre a área.
Ao contrário dos Momentos de Inércia Jz e Jy, o Produto de Inércia pode ser
positivo, negativo ou nulo e não tem significado físico. Será útil mais tarde para a
determinação dos próprios Momentos de Inércia. É indicado pela abreviação Jzy.
Calculando ∫ ⋅⋅= dSyzJzy para as figuras mais comuns temos:
z
dS
y
y
z
S

48
• Retângulo:
2b
z = yy = dybdS ⋅=
∫ ⋅⋅= dSyzJzy
h
0
22h
0zy 2
y2b
dyby2b
J
⋅=⋅⋅⋅= ∫
4
hbJ
22
zy⋅
=
• Triângulo:
Há quatro posições para os triângulos. Desenvolveremos uma delas.
zz = 2y
y =
dSyz21
dSy2y
zdSyzJb
0
b
0
2zy ⋅⋅=⋅⋅⋅=⋅⋅= ∫ ∫ ∫
dz bz
b2z
z2h
dz bz
b2z
-1hz21
Jb
02
322
2
22
b
0zy ∫∫
+−=
+⋅=
+−=
+−=
4b
32b
2b
2h
4bb
3b2b
2b
2h
J2222
2
4322
zy
Z
y
y
b
h
CG
z
−=+⋅−=bz
1hh zbh
y
b
h
y
dz
z
dS = y⋅dz
z

49
( )
+=
12b 38-6
2h
J22
zy ⇒ 24
hbJ
22
zy⋅
=
4.1. Teorema dos Eixos Paralelos
De forma semelhante ao que fizemos com os Momentos de Inércia teremos:
2d z'z +=
1d 'y += y
∫ ⋅⋅= dSyzJzy
( ) ( )∫ ⋅+⋅+= dSdy'dz'J 12zy
∫∫∫∫ ⋅⋅+⋅⋅+⋅⋅+⋅⋅= dSy'z'dSy'ddSz'ddSddJ 2121zy
SdJJ 21CGzyzy ⋅⋅+= d
O z
y
dS
CG
S
z
y
d1
d2
y’
z’
z
y

50
Aplicando para cada uma das figuras principais teremos:
• Retângulo:
SdJJ 21CGzyzy ⋅⋅+= d
hb2h
2b
J4hb
CGzy
22
⋅⋅⋅+=⋅
0=CGzyJ
• Triângulo:
SdJJ 21CGzyzy ⋅⋅+= d ⇒ 2
hb3h
3b
J24
hbCGzy
22 ⋅⋅⋅+=
⋅
72
22 hbJ CGzy
⋅−=
Z
y
h/2
b
h CG
b/2
zCG
yCG
b
h
y
z
zCG CG
yCG
h/3
b/3

51
5 – Momentos de inércia de uma área em relação a eixos inclinados
Muitas vezes é necessário calcular os momentos e o produto de inércia Ix’, Iy’ e Ix’y’ para
uma área em relação a um par de eixos u e v inclinados em relação aos eixos x e y , sendo
os valores de θ , Ix, Iy e Ixy conhecidos. Para isso utilizaremos as equações de transformação
que relacionam as coordenadas x, y e x’ e y’.
)sen()cos('
)sen()cos('
θθθθ
xyy
yxx
−=
+=
Sabendo-se que :
∫∫∫
=
=
=
dAyxI
dAxI
dAyI
yx
y
x
''
'
'
''
2'
2'
Substituindo x’ e y’ na expressão acima, tem-se:
dAyxxyI
dAyxI
dAxyI
yx
y
x
))sen()cos(())sen()cos((
))sen()cos((
))sen()cos((
''
2'
2'
θθθθ
θθ
θθ
+−=
+=
−=
∫∫∫
Expandindo cada expressão e lembrando que
dA
A
x'
y'
x
y
θ
θ
x
x'
y'
y
θ

52
∫∫∫
=
=
=
xydAI
dAxI
dAyI
xy
y
x
2
2
obtem-se
)sen(coscossencossen
cossen2cossen
cossen2sencos
22''
22'
22'
θθθθθθ
θθθθ
θθθθ
−+−=
++=
−+=
xyyxyx
xyyxy
xyyxx
IIII
IIII
IIII
Simplificando estas equações utilizando as identidades trigonométricas
θθθ
θθθ22 sencos2cos
cossen22sen
−=
=
resulta:
θθ
θθ
θθ
2cos2sen2
2sen2cos22
2sen2cos22
''
'
'
xyyx
yx
xyyxyx
y
xyyxyx
x
III
I
IIIII
I
IIIII
I
+−
=
+−
−+
=
−−
++
=
(1)
Se a primeira e a segunda equações forem somadas, pode-se mostrar que o momento polar
de inércia em relação ao eixo z que passa pelo ponto O é independente da orientação dos
eixo x’ e y’, ou seja:
yxyx IIIII +=+= ''0
Momentos principais de inércia
As equações (1) mostram que Ix’, Iy’ e Ix’y’ dependem do ângulo de inclinação V dos
eixos x’e y’. Deseja-se determinar agora a orientação desses eixos para os quais os
momentos de inércia da área, Ix’ e Iy’ são extremos, isto é, máximo e mínimo. Este par de
eixos em particular é chamado de eixos principais de inércia e os correspondentes
momentos de inércia em relação a eles são os chamados momentos principais de inércia .
Em geral existe um par de eixos para cada origem O escolhida. Nos projetos estruturais e
mecânicos de um elemento, a origem O é geralmente localizada no centróide da área de
seção reta.

53
O ângulo θ=θp que define a orientação dos eixos principais da área pode ser obtido por
derivação da primeira das equações (1) em relação a θ , impondo-se resultado nulo.
02cos22sen2
2' =−−
−= θθθ xy
yxx III
ddI
Assim, em θ=θp
)(22tan
yx
xyp II
I
−−=θ (2)
Essa equação possui duas raízes θp1 e θp2 defasadas de 90 º e estabelecem a inclinação dos
eixos principais. De forma a substitui-las nas equações (1) devemos inicialmente obter o
seno e o cosseno de 2 θp1 e 2θp2 o que pode ser feito pela relação (2) em associação com a
identidade trigonométrica 12cos2sen 22 =+ pp θθ . Obtem-se dessa forma:
Para 1pθ
221
221
2
22cos
2
2sen
xyyx
yx
p
xyyx
xyp
III
II
III
I
+
−
−
=
+
−
−=
θ
θ
Para 2pθ
222
222
2
22cos
2
2sen
xyyx
yx
p
xyyx
xyp
III
II
III
I
+
−
−−
=
+
−=
θ
θ
Substituindo esses dois pares de relações trigonométricas nas equações (1) e simplificando
tem-se:

54
0
22
12
22
21
minmax
=
+
−±
+==
I
IIIII
II xyyxyx

55
Lista de Exercícios
1. Calcular os valores de Jz e Jy em relação ao sistema de eixos que passa pelo CG da
seção.
a)
5 5 3
3
18 (cm)
y
x

56
b)
2. Determine o produto de inércia (Jzy) para as figuras abaixo.
a)
5 5
5
3
8 8
9
18
z
y
(cm)
CG
h
b
y
h - y z dz
y
z

57
b)
c)
3. Determine o valor de CGzyJ para as figuras abaixo.
a)
CG h
b
y
h - y
z dz
y
z
CG h
b
y
h - y
z dz
y
z
CG h
b
2b/3
y
z h/3
zCG
yCG

58
b)
c)
CG h
b
2b/3
y
z
2h/3
zCG
yCG
CG h
b
2h/3
zCG
y
z
b/3
yCG





























