Embed Size (px)
Citation preview
C I R C U I T O S D I G I T A L E S R E C O N F I G U R A B L E S
2. DISPOSITIVOS LÓGICOS PROGRAMABLES SIMPLES
UNIVERSIDAD TECNOLÓGICA DE LA MIXTECA
Instituto de Electrónica y Mecatrónica
M. C. Felipe Santiago Espinosa
Marzo / 2017
1
INTRODUCCIÓN
• Los Dispositivos Lógicos Programables Simples (SPLD‟s) proporcionan la flexibilidad que no se consigue con lógica estándar (TTL y CMOS).
• Los primeros SPLD‟s se usaron para hacer partes de diseños que no correspondían con ningún componente existente en el mercado.
• Una aplicación típica para estos circuitos es la decodificación de direcciones desde un procesador, para el manejo de información de una memoria o de periféricos mapeados a memoria.
• Con su uso se redujo el número de chips, en comparación con una implementación con circuitos LSI, manteniendo una inversión mínima de capital cuando un ASIC a medida era la otra alternativa.
2
CARACTERÍSTICAS
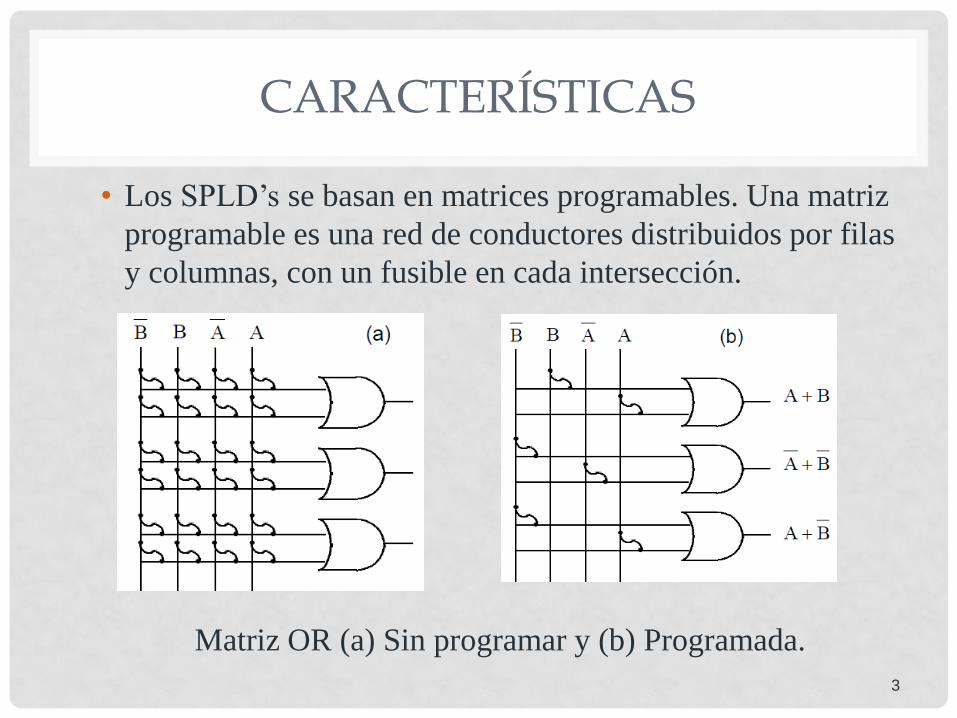
• Los SPLD’s se basan en matrices programables. Una matriz
programable es una red de conductores distribuidos por filas
y columnas, con un fusible en cada intersección.
Matriz OR (a) Sin programar y (b) Programada.
3

CARACTERÍSTICAS
Matriz AND (a) Sin programar y (b) Programada.
4
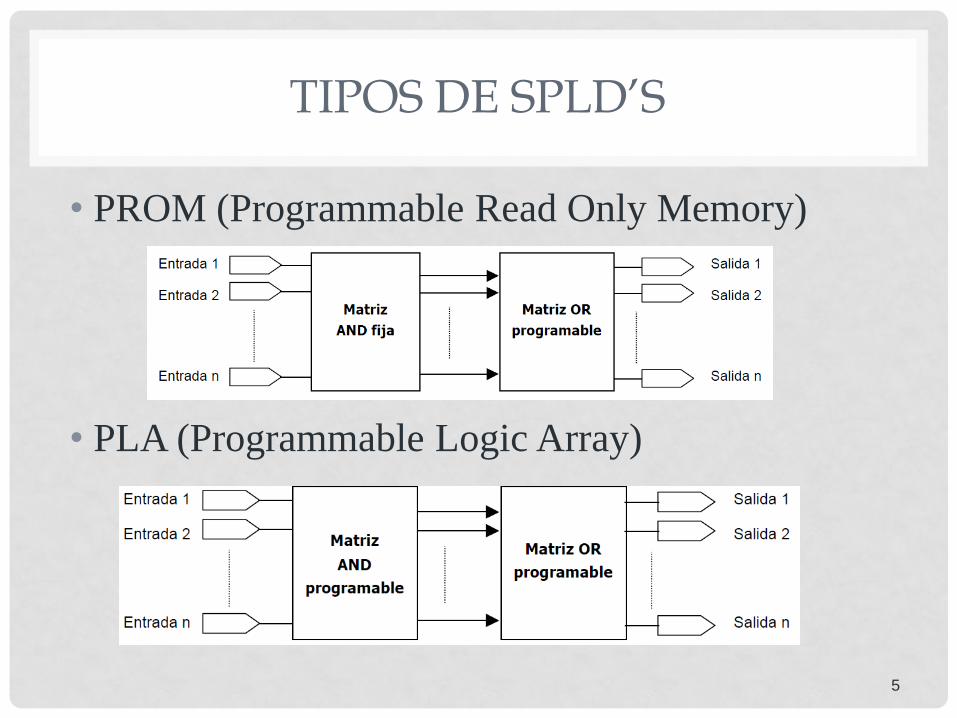
TIPOS DE SPLD’S
• PROM (Programmable Read Only Memory)
• PLA (Programmable Logic Array)
5
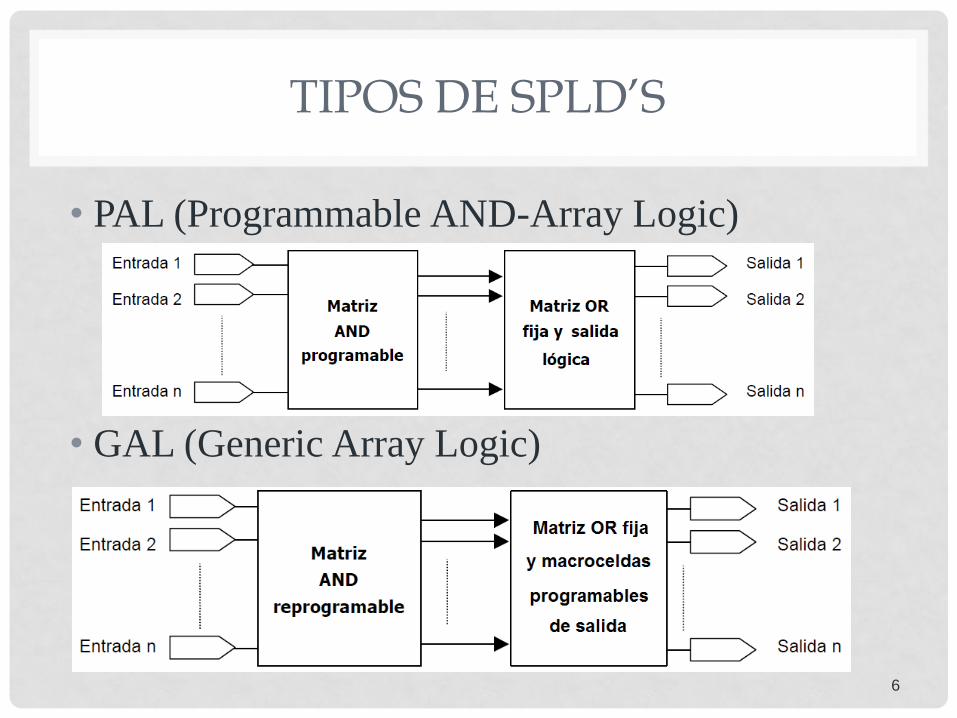
TIPOS DE SPLD’S
• PAL (Programmable AND-Array Logic)
• GAL (Generic Array Logic)
6
PAL Y GAL
• Los dispositivos lógicos programables que se emplean con mayor frecuencia son la PAL y la GAL.
• En el nombre del dispositivo se especifican algunas características, ejemplos: • PAL16L8 – Es una PAL con 16 entradas y 8 salidas, las salidas
son lógicas (combinacionales).
• PAL16R8 – Es una PAL similar a la anterior pero las salidas con registros (flip-flops).
• GAL16V8 – Es una GAL con 16 entradas y 8 salidas versátiles, es decir, pueden ser tanto combinacionales como con registro.
• Otros dispositivos: PALCE16V8, PALCE22V10, GAL18V10, GAL20V8 , GAL22V10 y GAL26V12.
7
PROGRAMACIÓN DE SPLD’S
• El comportamiento del circuito se define con algún lenguaje de descripción de hardware (HDL).
• Las herramientas de software ayudan en la edición de la descripción, así como en la compilación y simulación del circuito.
• Algunas herramientas para SPLD‟s son: • CUPL: Compilador universal para lógica programable.
• ABEL: Lenguaje Avanzado para expresiones booleanas.
• OPAL, PALASM, TANGO-PLD, etc.
• Con la descripción libre de errores se crea un archivo de configuración que será descargado en el chip para su evaluación real.
8
WINCUPL
CUPL: Es un Compilador universal para Lógica Programable, se emplea para programar o simular SPLDs.
Con CUPL es posible compilar descripciones de circuitos combinacionales o secuenciales.
WinCUPL es una versión de CUPL para windows. Es un entorno desarrollado por Atmel Corporation.
Un circuito combinacional se describe por medio de su ecuación booleana o con su tabla de verdad.
Para los circuitos secuenciales se pueden emplear ecuaciones
para los elementos de estado. Aunque también es posible una descripción a través de una máquina de estados finitos, conservando la estructura de la solución del problema.
9

En WinCUPL, los archivos con las descripciones tienen extensiones .PLD.
El compilador genera los archivos siguientes:
Un archivo JEDEC (filename.JED) para descargarse con un programador o emplearse con un simulador.
Un archivo absoluto (filename.ABS) para usarse por CSIM, el módulo de simulación de CUPL.
Un archivo de lista (filename.LST) que muestra los errores en el archivo fuente original.
Un archivo de documentación (filename.DOC) que contiene ecuaciones lógicas expandidas, tablas de símbolos, términos productos e información del mapa de fusibles.
Un archivo en formato PLA (filename.PLA) para ser usado por otros módulos o programas técnicos.
10

ECUACIONES BOOLEANAS
• Se pueden emplear los 4 operadores lógicos
fundamentales: NOT, AND, OR y XOR:
• Una ecuación lógica tiene la forma:
[ ! ] var [ .ext ] = exp;
Operador Descripción Ejemplo Precedenci
a
! NOT !A 1
& AND A & B 2
# OR A # B 3
$ XOR A $ B 4
11

Donde:
• Var es una variable o lista de variables indexadas o no
indexadas. Si se trata de una lista, la expresión se aplica a los diferentes elementos de la lista.
• .ext es una extensión a las variables que las vincula con las características de los dispositivos programables [opcional].
• Exp es una expresión, es decir, una combinación de variables y operadores.
• = el operador de asignación que se aplica a una variable o a un conjunto de variables
• ! El operador de complemento [opcional]. Para generar salidas con lógica negada.
12
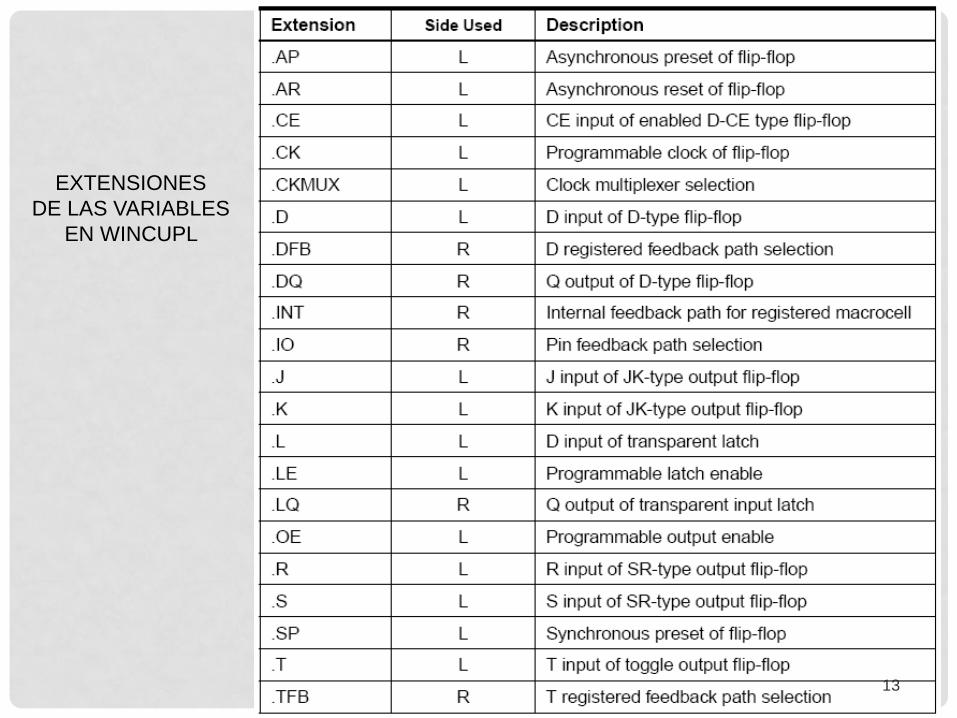
EXTENSIONES
DE LAS VARIABLES
EN WINCUPL
13
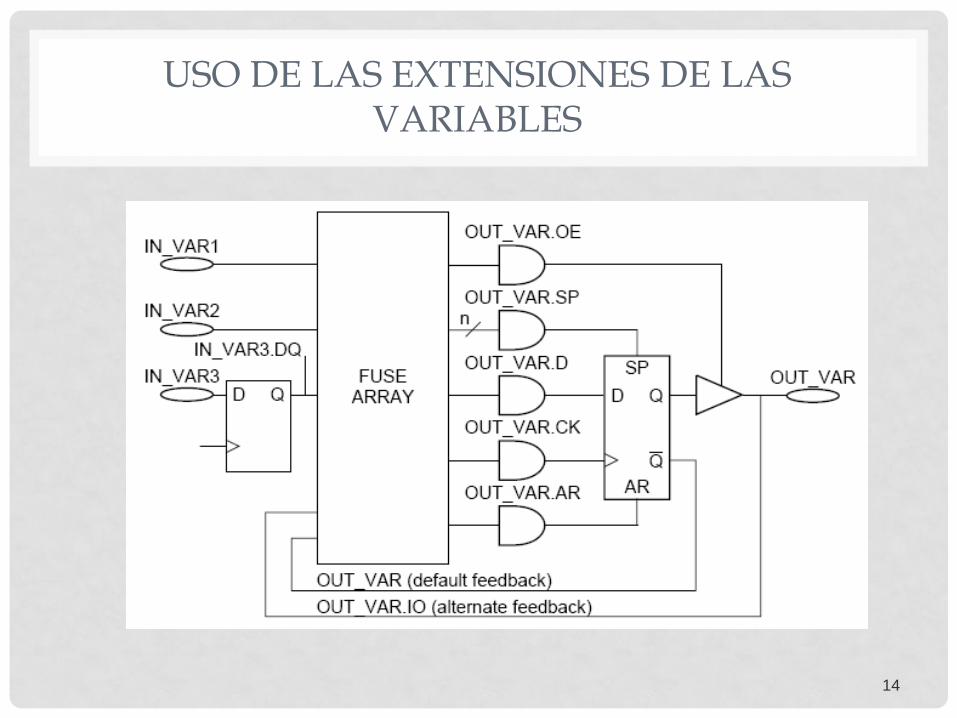
USO DE LAS EXTENSIONES DE LAS VARIABLES
14
VARIABLES INDEXADAS
• Las variables son indexadas si finalizan con un número, referido como índice, pueden usarse para representar buses. Por ejemplo, para: A0 A1 A2 A3 A4 A5 A6 A7, puede usarse A0..A7 (ó simplemente A0..7).
• El índice es un número entre 0 y 31, siendo el bit 0 el menos significativo.
• Un operador puede aplicarse a un conjunto de variables indexadas, por ejemplo, las expresiones:
[A3, A2, A1, A0] : & A3 & A2 & A1 & A0
[B3 .. B0] : # B3 # B2 # B1 # B0
[C3, C2, C1, C0] : $ C3 $ C2 $ C1 $ C0
15
AGRUPACIÓN DE VARIABLES
• Con la palabra reservada FIELD se hace referencia
a un grupo de variables (indexadas o no) para
tratarlas como una variable única de varios bits, por
ejemplo:
FIELD address = [ A3 .. A0];
FIELD modo = [ini, asc, des ];
16
DESCRIPCIONES EN WINCUPL
Una descripción en WinCUPL debe iniciar con:
• Encabezado: Se indica el nombre del programa, el dispositivo a ser programado (usaremos g22v10), el autor, la fecha y otros datos (se genera en forma automática).
• Asignación de terminales: Se asignan las terminales de entrada y salida del dispositivo. • Ejemplo: PIN 1 = A ; /* Comentarios de ayuda*/
• Es posible emplear variables indexadas en la definición de entradas, por ejemplos:
PIN [1..4] = [a0..a3]; /* Entrada de 3 bits */
PIN [1..4] = [a3..a0]; /* Debe aparecer el índice 0 */
17
EJEMPLO 1: CIRCUITO COMBINACIONAL
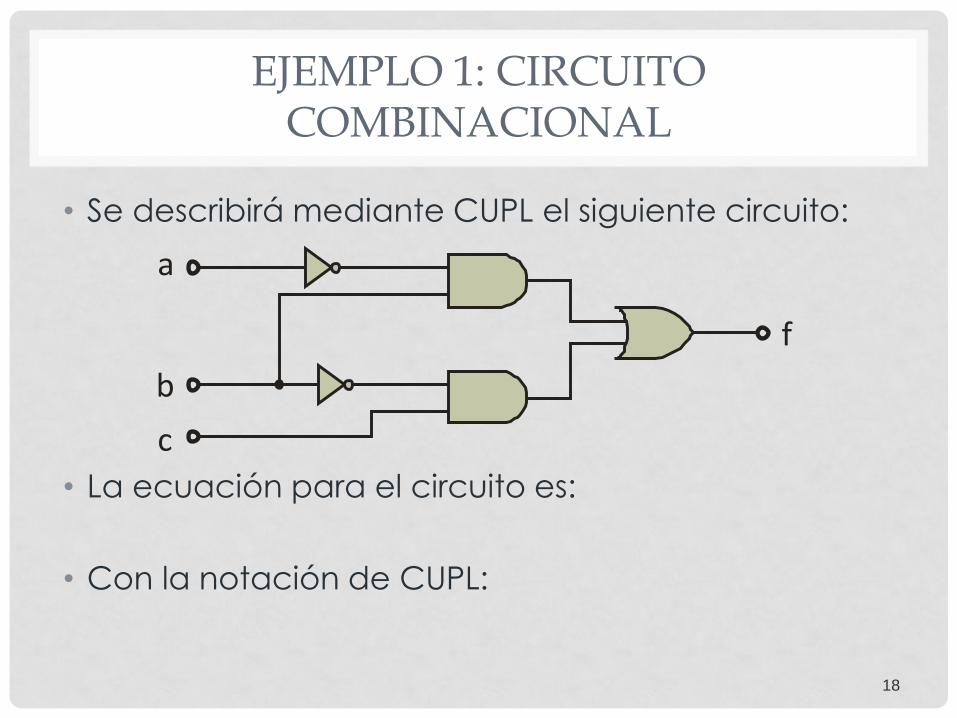
• Se describirá mediante CUPL el siguiente circuito:
• La ecuación para el circuito es:
• Con la notación de CUPL:
a
b
c
f
18

• Se utilizará una GAL22V10:
• Entradas:
• Pin 1 – a
• Pin 2 – b
• Pin 3 – c
• Salida:
• Pin 23 – f
CIRCUITO COMBINACIONAL
19
SIMULACIÓN EN WINCUPL
1. Iniciar un nuevo archivo de simulación a partir del archivo PLA
2. Agregar señales al espacio de simulación
3. Agregar vectores
4. Definir los valores de las entradas
5. Ejecutar la simulación
1. Definir el circuito
2. Cargar el archivo JED en el PAL
3. Ejecutar la simulación
Simulación en ISIS de Proteus
20
TABLAS DE VERDAD
• Es otra manera de describir circuitos combinacionales, CUPL reserva a la palabra TABLE para estas descripciones.
• Primero se define un campo (FIELD) para las variables de entrada y otro para las variables de salida. Después se especifican una a una las asignaciones de las salidas ante las diferentes entradas (Es posible generar el código en forma automática).
• Se pueden considerar condiciones no importa para las entradas pero no para las salidas.
• Una lista de valores de entrada se puede considerar para generar la misma salida.
21
SINTAXIS DE UNA TABLA DE VERDAD
FIELD ent = [D3..0]; /* Número en binario */
FIELD sal = [Q7..0]; /* Número en BCD */
TABLE ent => sal {
0=> 00; 1=>01; 2=>02; 3=>03;
4=>04; 5=>05; 6=>06; 7=>07;
8=>08; 9=>09; A=>10; B=>11;
C=>12; D=>13; E=>14; F=>15;
}
• Con excepción de las terminales de los dispositivos y la definición de las variables indexadas, que siempre se definen en decimal, para otras operaciones CUPL maneja los números en hexadecimal, a menos que se especifique otra base utilizando el prefijo correcto.
22
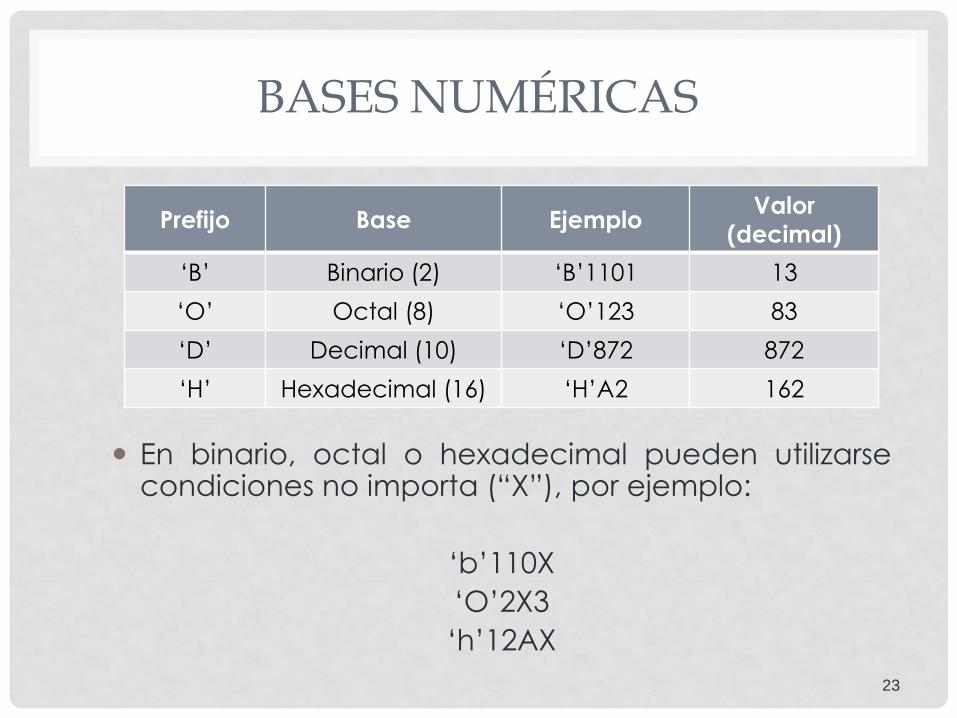
BASES NUMÉRICAS
En binario, octal o hexadecimal pueden utilizarse condiciones no importa (“X”), por ejemplo:
„b‟110X
„O‟2X3
„h‟12AX
Prefijo Base Ejemplo Valor
(decimal)
„B‟ Binario (2) „B‟1101 13
„O‟ Octal (8) „O‟123 83
„D‟ Decimal (10) „D‟872 872
„H‟ Hexadecimal (16) „H‟A2 162
23
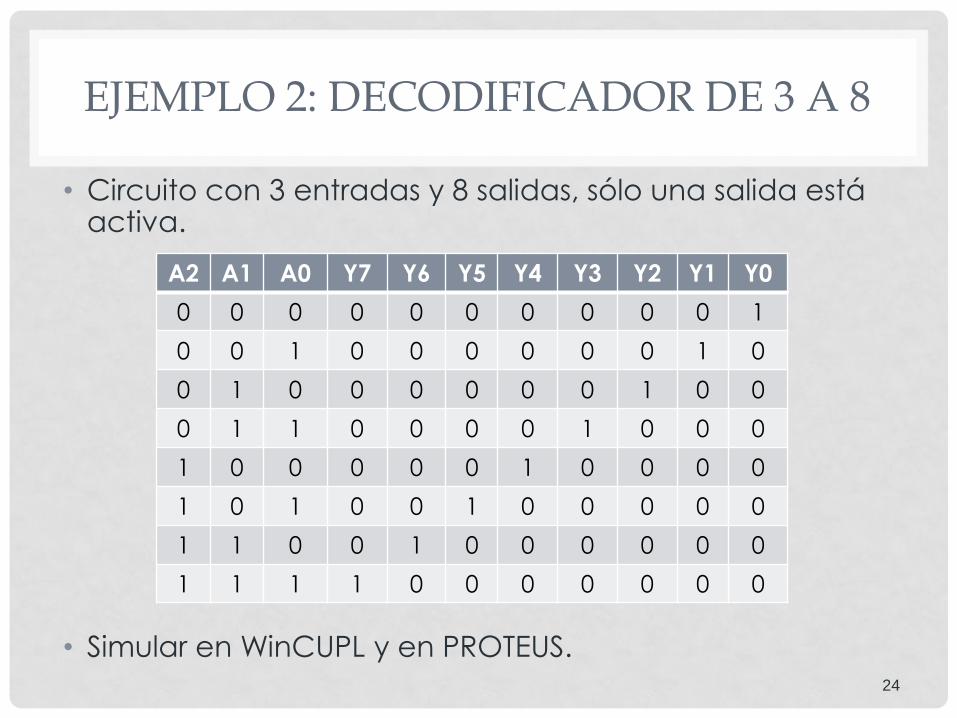
EJEMPLO 2: DECODIFICADOR DE 3 A 8
• Circuito con 3 entradas y 8 salidas, sólo una salida está activa.
• Simular en WinCUPL y en PROTEUS.
A2 A1 A0 Y7 Y6 Y5 Y4 Y3 Y2 Y1 Y0
0 0 0 0 0 0 0 0 0 0 1
0 0 1 0 0 0 0 0 0 1 0
0 1 0 0 0 0 0 0 1 0 0
0 1 1 0 0 0 0 1 0 0 0
1 0 0 0 0 0 1 0 0 0 0
1 0 1 0 0 1 0 0 0 0 0
1 1 0 0 1 0 0 0 0 0 0
1 1 1 1 0 0 0 0 0 0 0
24
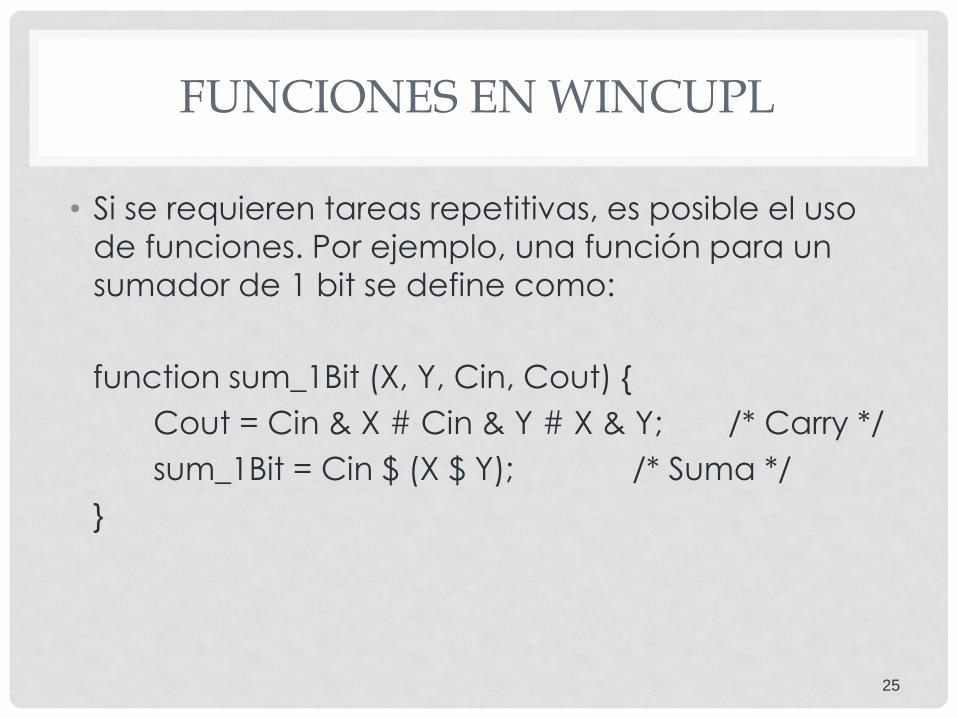
FUNCIONES EN WINCUPL
• Si se requieren tareas repetitivas, es posible el uso
de funciones. Por ejemplo, una función para un
sumador de 1 bit se define como:
function sum_1Bit (X, Y, Cin, Cout) {
Cout = Cin & X # Cin & Y # X & Y; /* Carry */
sum_1Bit = Cin $ (X $ Y); /* Suma */
}
25
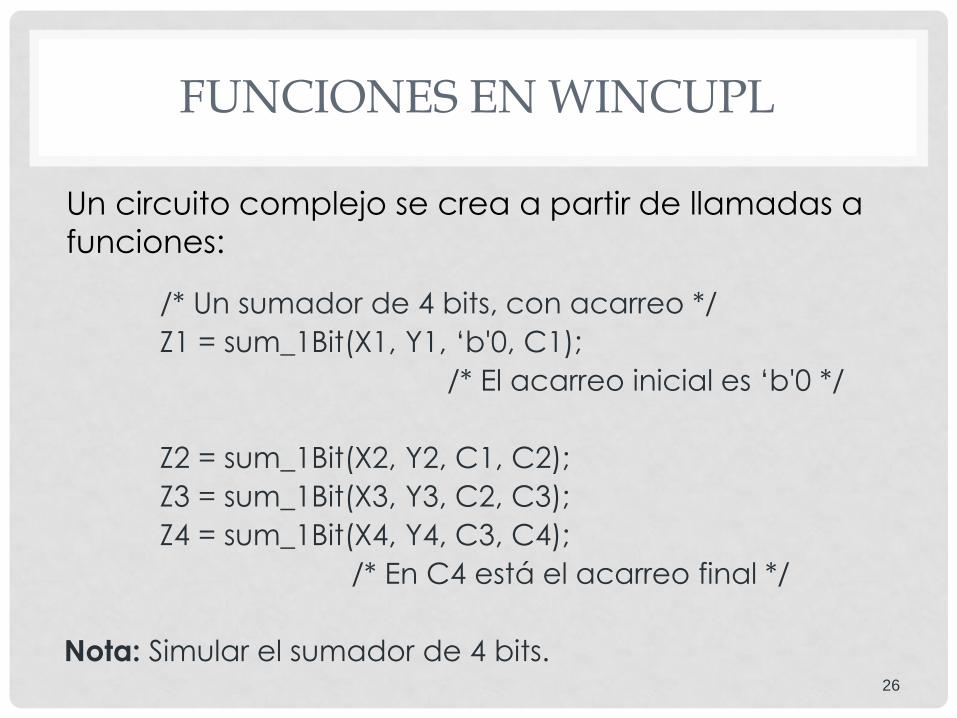
FUNCIONES EN WINCUPL
/* Un sumador de 4 bits, con acarreo */
Z1 = sum_1Bit(X1, Y1, „b'0, C1);
/* El acarreo inicial es „b'0 */
Z2 = sum_1Bit(X2, Y2, C1, C2);
Z3 = sum_1Bit(X3, Y3, C2, C3);
Z4 = sum_1Bit(X4, Y4, C3, C4);
/* En C4 está el acarreo final */
Nota: Simular el sumador de 4 bits.
Un circuito complejo se crea a partir de llamadas a
funciones:
26
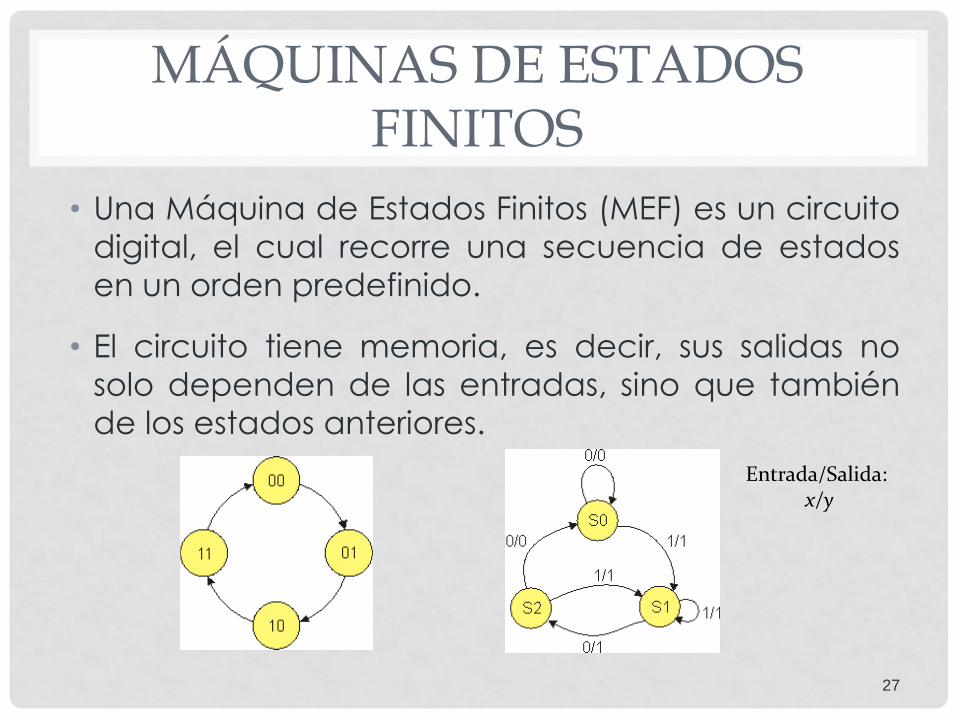
MÁQUINAS DE ESTADOS FINITOS
• Una Máquina de Estados Finitos (MEF) es un circuito
digital, el cual recorre una secuencia de estados
en un orden predefinido.
• El circuito tiene memoria, es decir, sus salidas no
solo dependen de las entradas, sino que también
de los estados anteriores.
Entrada/Salida: x/y
27
MEF
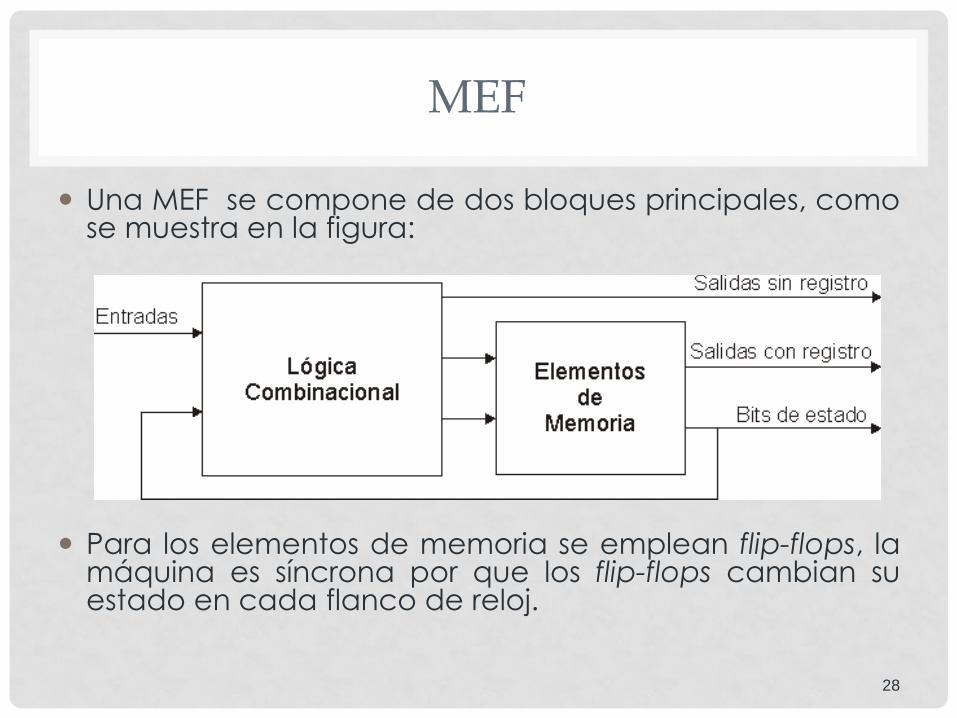
Una MEF se compone de dos bloques principales, como se muestra en la figura:
Para los elementos de memoria se emplean flip-flops, la máquina es síncrona por que los flip-flops cambian su estado en cada flanco de reloj.
28
MÁQUINA DE MEALY
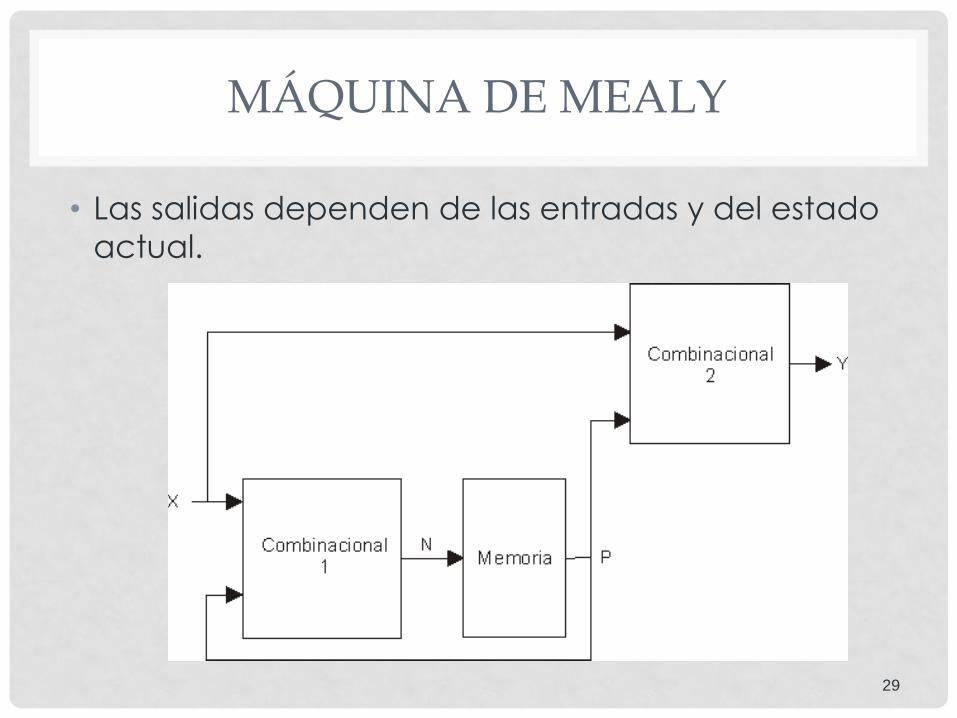
• Las salidas dependen de las entradas y del estado
actual.
29
MÁQUINA DE MOORE
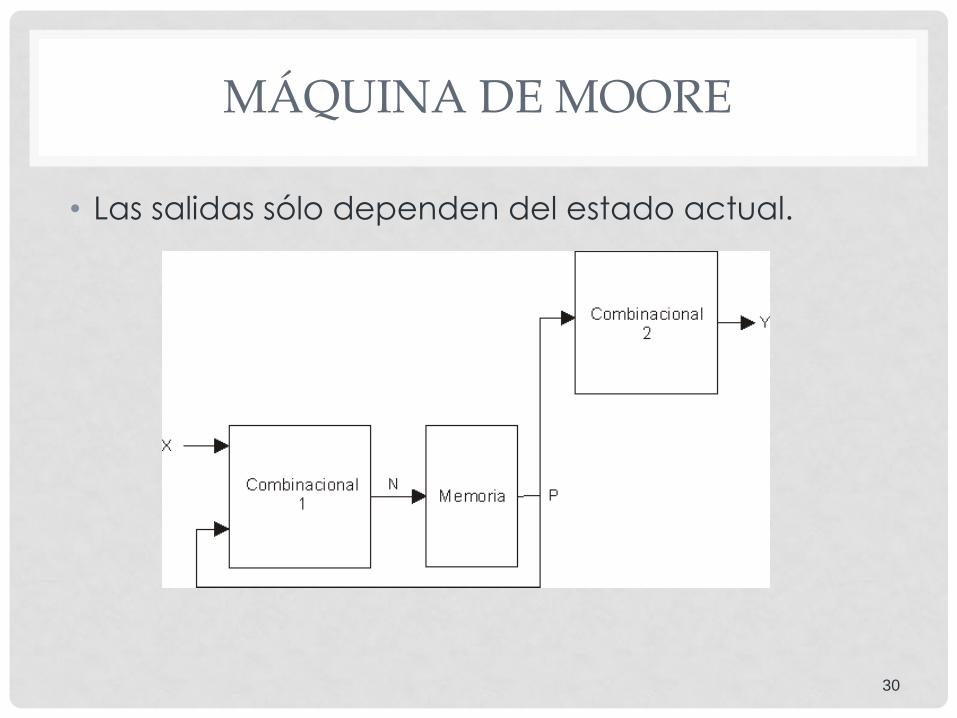
• Las salidas sólo dependen del estado actual.
30
MEF EN WINCUPL
Para definir una máquina de estados en CUPL primero se determinan los bits con los que se representarán los estados válidos, para ello se crea un FIELD.
FIELD Estados = [Qn..Q0];
[Qn..0] son terminales de salida, según el número de estados.
Cada estado puede tener un nombre simbólico, se establece con la palabra $define
$define s0 „b‟0...0
$define s1 „b‟0…1
. . .
$define sk „b‟1…1 31
FSM EN WINCUPL
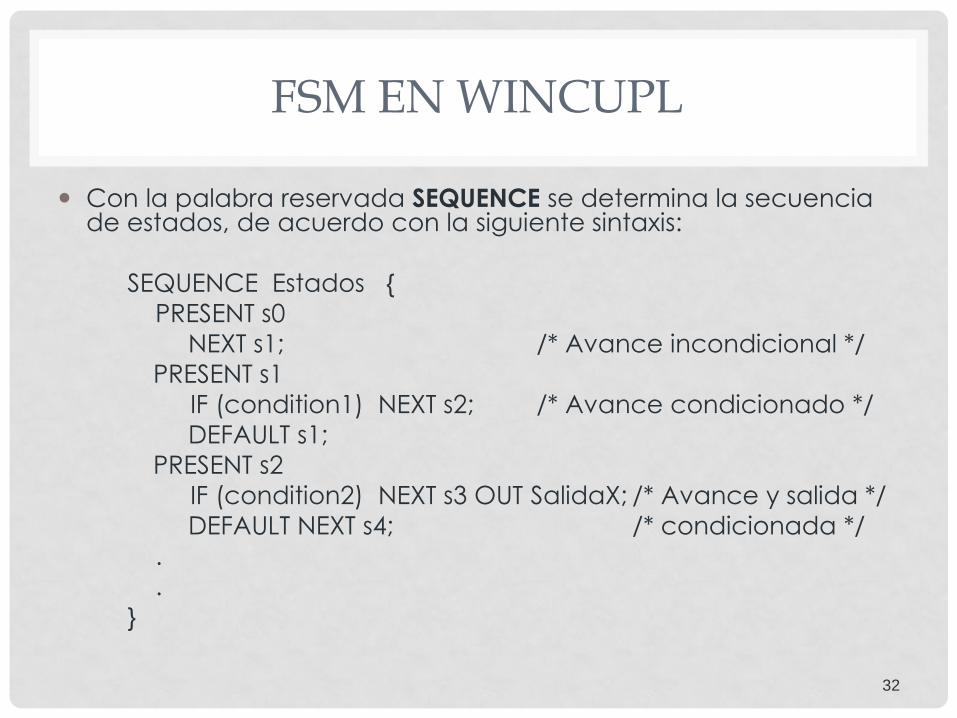
Con la palabra reservada SEQUENCE se determina la secuencia de estados, de acuerdo con la siguiente sintaxis:
SEQUENCE Estados {
PRESENT s0
NEXT s1; /* Avance incondicional */
PRESENT s1
IF (condition1) NEXT s2; /* Avance condicionado */
DEFAULT s1;
PRESENT s2
IF (condition2) NEXT s3 OUT SalidaX; /* Avance y salida */
DEFAULT NEXT s4; /* condicionada */
.
.
}
32
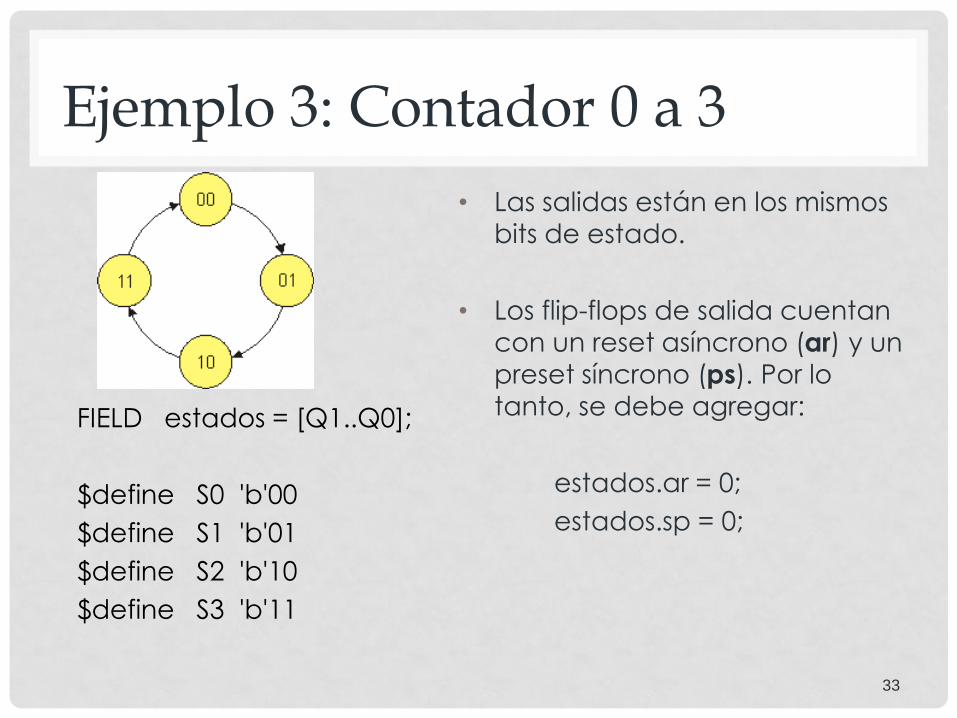
• Las salidas están en los mismos
bits de estado.
• Los flip-flops de salida cuentan
con un reset asíncrono (ar) y un
preset síncrono (ps). Por lo
tanto, se debe agregar:
estados.ar = 0;
estados.sp = 0;
Ejemplo 3: Contador 0 a 3
FIELD estados = [Q1..Q0];
$define S0 'b'00
$define S1 'b'01
$define S2 'b'10
$define S3 'b'11
33
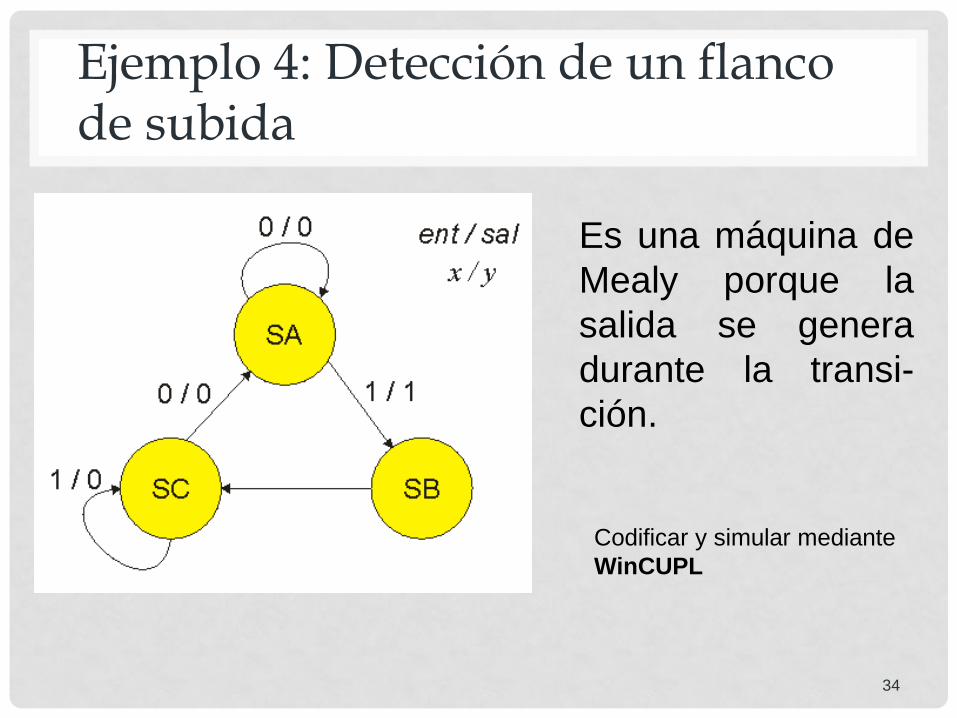
Ejemplo 4: Detección de un flanco de subida
Es una máquina de
Mealy porque la
salida se genera
durante la transi-
ción.
Codificar y simular mediante
WinCUPL
34
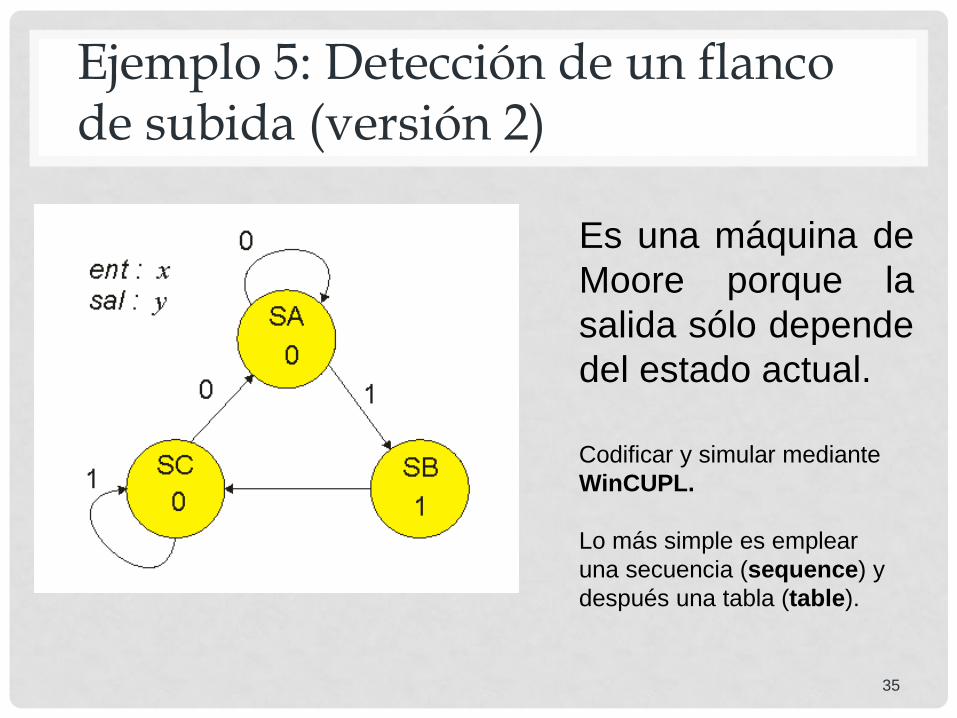
Ejemplo 5: Detección de un flanco de subida (versión 2)
Es una máquina de
Moore porque la
salida sólo depende
del estado actual.
Codificar y simular mediante
WinCUPL.
Lo más simple es emplear
una secuencia (sequence) y
después una tabla (table).
35
EJERCICIOS:
1. Multiplexor de 2 a 1.
2. Decodificador de BCD a 7 segmentos.
3. Comparador de datos de 4 bits.
4. Generador de paridad Par/Impar.
5. Contador Up/Down de 3 bits.
6. Registro de corrimiento, entrada serial y salida paralela.
7. Sistema con dos semáforos (que el color verde tarde el doble de tiempo que el amarillo).
8. Control automático de una bomba de agua
9. Seguidor de línea con dos motores independientes
10. Control de una puerta automática
36