Embed Size (px)
Citation preview

2048 IEEE SENSORS JOURNAL, VOL. 11, NO. 9, SEPTEMBER 2011
Proposal and Development of Arrayed Sole Sensorfor Legged Robot and Contact Force Detection
Using Neural NetworksSeiji Aoyagi, Member, IEEE, Takashi Matsuda, Tse-Wei Kong, Tatsuya Ishimaru, Masato Suzuki, and Kenji Inoue
Abstract—Recently, multilegged walking robots are widely de-veloped. For these robots to walk safely, a sole sensor with highperformance is desired. In the present paper, an arrayed type tac-tile sensor made of flexible silicone rubber, which is based on mi-croelectromechanical systems (MEMS) technology, was developed.This sensor was applied as a sole sensor of a legged mobile robot. Byprocessing the force data from many sensing elements using neuralnetworks, information of contact force, i.e., three-dimensional , ,and components of force vector, was able to be detected, whichwas confirmed by both simulation and experiment.
Index Terms—Finite-element methods (FEMs), microelectrome-chanical devices, neural networks, tactile sensors.
I. INTRODUCTION
R ECENTLY, the multilegged walking robots are widelydeveloped. Since this type robot has high ability of
traversing cluttered environment with a rugged surface, theapplication of it to a complicated situation such as a disastersite is expected. In the situation that the ground surface se-verely ungulates, or visual sensors cannot be used owing to thedarkness, a sole sensor to detect the contact force is desired forperforming the stable walking.
Inoue, one of the authors of the present paper, has developeda mobile robot with six legs, which can switch the function ofeach link mechanism between arm and leg for adapting the envi-ronmental situation [1]. Aoyagi, one of the authors of the presentpaper, is developing an arrayed tactile sensor using microelec-tromechanical systems (MEMS) technology. The structural ma-terial of it is polydimethylsiloxane (PDMS), which is a kind ofsilicone rubber [2], so the sensor is flexible to fit the surface ofrobot finger, robot sole, etc. The sensor is composed of arrayedsensing elements, each of which detects its capacitance change
Manuscript received January 14, 2010; revised December 17, 2010; acceptedJanuary 07, 2011. Date of publication January 28, 2011; date of current ver-sion July 29, 2011. This work was supported in part by the Kansai Univer-sity Research Grants: Grant-in-Aid for Joint Research, 2008. “Application ofMEMS Arrayed Tactile Sensor to Sole of Multi-Legged Robot.” The associateeditor coordinating the review of this paper and approving it for publication wasDr. Patrick Ruther.
S. Aoyagi, T. Matsuda, T.-W. Kong, T. Ishimaru, and M. Suzuki arewith the Department Mechanical Engineering, Kansai University, Suita-shi,Osaka 564-8680, Japan (e-mail: [email protected]; [email protected]; [email protected]; [email protected]; [email protected]).
K. Inoue is with the Department Bio-System Engineering, Yamagata Univer-sity, Yonezawa-shi, Yamagata, 992-8510, Japan (e-mail: [email protected]).
Digital Object Identifier 10.1109/JSEN.2011.2109037
with respect to the displacement of the sensing surface in (ver-tical) direction. In the present paper, this sensor is applied to asole sensor of the abovementioned legged mobile robot. By pro-cessing the force data from many sensing elements by neuralnetworks (NN), information of contact force, i.e., three-dimen-sional (3-D) , , and components of force vector, can bedetected [3].
The human skin contains numerous force-sensing receptorsdistributed horizontally and vertically at intervals of about 1 mm[4]. It is technically difficult to fabricate a sensor having nu-merous force sensing elements. Attempts have been made tosolve this problem by analyzing stress distribution optically [5].Ascari et al. once transform the force data of massive tactilesensing elements to a tactile image, followed by image signalprocessing, which is effective to detect contact position and slip-page for successful pick and lift tasks [6].
MEMS technology is effective for fabricating a tactile sensorof directly processing force data, i.e., not processing opticallytransformed data, since numerous arrayed miniature force sen-sors with uniform performance are fabricated on a silicon waferwith fine resolution of several microns. Tactile sensors proposedand developed based on MEMS are classified to piezoresistive[7] and capacitive [8]. We focus on capacitive tactile sensors,mainly considering fabrication ease that lowers cost.
Human tactile sensing receptors detect force magnitude butnot its direction. The brain synthesizes nerve signals from re-ceptors and obtains cutaneous stress distribution to finally rec-ognize the direction. If individual receptors (sensors) could de-tect the 3-D force direction, however, signal processing in tactilesensing would become easier and more accurate. Even though,we use an array of single axis sensors at present and using a 3-Dsensor is future work.
Several tactile sole sensors are reported for the use of stablewalking of humanoid robots [9]–[11], in which the stress dis-tribution inside the sole is discussed. Compared with these re-ports, a method of acquiring the contact force is proposed inthe present paper, in which the outputs of many sensing ele-ments, i.e., stress distribution, are processed by NN. Note thatsimilar challenges are proposed and conducted as cellular non-linear/neural networks (CNN) [6].
The composition of this paper is organized as follows: first,the validity of measuring principle using arrayed sensor and NNwas confirmed by the simulation, in which the stress distributionof the PDMS sensor sheet was given by finite-element method(FEM) analysis. The optimal number and the size of sensing el-ements of the array were also investigated by this simulation.
1530-437X/$26.00 © 2011 IEEE

AOYAGI et al.: PROPOSAL AND DEVELOPMENT OF ARRAYED SOLE SENSOR FOR LEGGED ROBOT AND CONTACT FORCE DETECTION 2049
Fig. 1. Overview of robot with six legs, which also act as arms.
Fig. 2. Robot’s leg and sole sensor. (a) Robot leg. (b) Tip of leg with a hollow.(c) Attachment of sensor to a rubber ball.
Second, an arrayed sensor was practically fabricated. Finally,the performance of the sensor was investigated by an experi-ment, in which various forces were applied by changing its mag-nitude and direction, and they were detected by both the devel-oped arrayed sensor and a commercial multiaxes force sensorfor reference.
The features of this research are as follows. 1) The spacerequired for installing the entire measuring system becomessmaller compared to the case that a commercial multiaxesforce sensor is installed at the robot’s ankle part. 2) Sincethe sensor can be set near the contact surface compared withthe case that a multiaxes force sensor is set to the ankle part,higher accuracy of force measurement is expected. 3) Thesensor is expected to be economical compared with multiaxesforce sensors, since MEMS sensor has a merit of fabricatingnumerous small sensors with small cost due to its batch processusing a photolithography technique.
II. ARRANGEMENT OF SENSOR AND LEGGED ROBOT
The robot to which the sole sensor is attached has six legs, asshown in Fig. 1. Each leg can be used as an arm depending onthe environmental situation, so the size of the robot is miniatur-ized compared with a normal robot equipped with arm mecha-nism and leg (or wheel) mechanism separately. Moreover, thetraverse ability and flexibility on different environmental situa-tion are expected to be excellent. The small and light sensor fab-ricated by MEMS technique is suitable for the sole sensor of thisrobot, since it does not degrades the robot’s advantage of beingsmall and light. The overview of the leg of the robot is shownin Fig. 2(a). The length of each leg, which has three joints, is
Fig. 3. Condition of simulation.
350 mm at full expansion. There is a hemispheric hollow of20 mm diameter in the tip part of each leg, as shown in Fig. 2(b).A rubber ball is set in the hollow, as shown in Fig. 2(c).
An arrayed tactile sensor is set between two rubber hemi-spheres, which are made by cutting a rubber ball into two halves.They are fixed again to one spherical ball, and attached to thehollow at the leg’s tip using adhesive resin.
III. SIMULATION ANALYSIS OF OPTIMAL NUMBER AND SIZE
OF SENSING ELEMENTS OF ARRAYED SENSOR
A. Simulation Model
The force is assumed to be applied from the floor to the ball.The force is applied by changing its direction at every 10 withinthe range that is from 0 to 90 , and is from 40 to 90 ,i.e., within the 1/4 space, as shown in Fig. 3.
Here, if the external load force besides from the floor exists orif the rubber ball is largely deformed, the applied total force doesnot exactly go through the center of the sensor. The investigationon this effect should be the projected work.
As FEM software, ANSYS® is used. The meshed model usedfor simulation is shown in Fig. 4(a), in which two hemispheresare assumed to be the halves divided from the rubber ball, a thinblock put between the two hemispheres is assumed to be thePDMS sensor sheet, and the block on the surface of the upperhemisphere is assumed to be the floor. Namely, the floor, thesensor, and the ball are turned upside down in this FEM model,considering the limit of memory resource of computer. The ma-terials are set as follows: rubber ball is made of butadiene rubber(Young’s modulus is 5.2 MPa, Poisson ratio is 0.49, den-sity is 910 ), the sensor sheet is made of PDMS ( is3.0 MPa, is 0.40, is 1500 ), and the floor is made ofcement ( is 25 GPa, is 0.15, is 2500 ). An exampleof the result, in which the distribution of stress in vertical ( )direction is analyzed, is shown in Fig. 4(b). As shown in thisfigure, the stress distribution is not simple, requiring NN usinga lot of sensing elements other than numerical calculation usingfewer elements.
B. Analysis (Preparation of Training Data and VerificationData for NN)
The stress distribution in the sensor sheet is obtained by FEManalysis. Considering the symmetry, the data in the whole spaceis obtained, which are totally 181 combinations of and .They compose the training data set for the NN. As the verifi-cation data set for confirming the generalization ability of theNN, the stress distributions at 180 combinations of and

2050 IEEE SENSORS JOURNAL, VOL. 11, NO. 9, SEPTEMBER 2011
Fig. 4. FEM simulation. (a) Model. (b) Example of stress distribution in case that � � �� , � � �� (see Fig. 3).
Fig. 5. The data of stress in � direction of FEM nodes within the assumedrectangular space are averaged, and the averaged value is assigned to the sensingelement as its output.
are used, which are shifted from those of training data set by 5in and , respectively.
The rectangular divided spaces are assumed in the sensorsheet, which are correspondent to the sensing elements of the ar-rayed sensor, as shown in Fig. 5. The stress distribution obtainedby FEM simulation is the cluster of stress datum at each node ofmeshed model. The data of stress in direction of FEM nodeswithin the abovementioned assumed rectangular space are aver-aged, and the averaged value is assigned to the sensing elementas its output.
After assigning the FEM result to each sensing element, everydata are normalized so as that the maximum stress value is to be1, and input to the NN.
C. Assumed Sensors Having Different Number of SensingElements and Different Sensing Area of Each Element
Several types of sensor, of which effective region is fixed to14 mm square, are assumed by changing the number of sensingelements and changing the area of sensing surface of each ele-ment, as shown in Fig. 6.
While the area of each element in Sensors A, B, C, D, andE is fixed to 1 mm square, the number of elements of them isvaried at 4, 9, 25, 49, and 81, respectively.
While the number of elements of Sensor F coincides with thatof Sensor A, the area of each element of Sensor F is larger thanthat of Sensor A. So do Sensor G and Sensor B, Sensor H andSensor C.
D. Neural Networks
The FEM simulated outputs of all the sensing elements areinput to the NN, which outputs three components , and
Fig. 6. Effective regions of assumed sensors having different number ofsensing elements and different sensing area of each element.
Fig. 7. Composition of neural networks.
TABLE ITHE NUMBER OF NEURONS OF EACH LAYER
of force vector . The composition of NN is shownin Fig. 7. The number of neurons of each layer of the NN isshown in Table I. The employment of two hidden layers, andthe definition of the number of neurons of them are based onthe adjustment by trial and error.
The connection weights between adjacent neurons in theNN are obtained by supervised learning. As a learning method

AOYAGI et al.: PROPOSAL AND DEVELOPMENT OF ARRAYED SOLE SENSOR FOR LEGGED ROBOT AND CONTACT FORCE DETECTION 2051
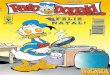
Fig. 8. Errors of force direction for verification data set.
that decreases the error between NN outputs and training data,RPROP method [12] modifying the well-known backpropaga-tion (BP) method is adopted, which speeds up the convergencecalculation by several tens times compared with the BP method.After supervised learning, verification data are input to the NNfor confirming the effectiveness of the NN.
E. Results of Simulation
The error between the components of applied force vectorand those of output force vector of the NN was estimatedby the angle between and . The average of errors for 180verification data set for Sensor A–F are shown in Fig. 8. Addingto say, almost the same results were obtained by the simulation,in which the 5% random error is added to each output of thesensing elements (data were omitted).
Looking at this figure, the error of force direction becomessmaller as the number of sensing elements increases. This trend,however, is saturated if the number is beyond or around 10. Also,the error becomes smaller as the area of each sensing elementincreases. Although this trend is conspicuous in the case that thenumber of sensing elements is 4, i.e., in the comparison betweenSensor A and Sensor F, it is not so conspicuous in the compar-ison between Sensor B and Sensor G, and that between SensorC and Sensor H.
Considering both the abovementioned results and the factorthat the large number of sensing elements requires large cost offabrication/assembling, the number of sensing elements is setto 9 ( ). And the area of sensing element is fixed to4 mm square. Namely, Sensor G is adopted in the following partof this paper.
F. Simulation of Practical Sensor Composed of 3 3Capacitive Sensing Elements
Taking account of the practical sensor structure, the detailedsimulation model is employed, as shown in Fig. 9(a). An ex-ample of the result, in which the distribution of displacement invertical ( ) direction was analyzed, is shown in Fig. 9(b). By ap-plying the multiphysics mode of ANSYS software to this model,the capacitance changes of sensing elements caused by thestress distribution are simulated. Then, the data of are inputto NN, the composition of which is shown in Fig. 10.
The training data set is prepared by changing the force direc-tion of and , and changing the force magnitude at 50
Fig. 9. Detailed FEM simulation. (a) Model with nine sensing elements.(b) Example of distribution of displacement in � direction in case that� � �� , � � �� .
Fig. 10. Composition of neural networks for detailed sensor model.
and 150 gf. The number of combinations of , , and fortraining is 362 in total. The verification data set is prepared byshifting the stress angles of and by 5 , respectively, while
is fixed to 100 gf. The number of combinations of , , andfor verification is 180 in total.
After supervised learning of NN, the simulation was carriedout for verification data set. The resultant averaged error of forcedirection was 2.4 . This value is 0.7% of the full range of 360 .The averaged error of force magnitude was 5.3 gf. This valueis 5.3% of applied force of 100 gf. Namely, it is confirmed thatthis sensor has possibility of sensing the force direction and itsmagnitude within several percent of applied values, of whichorder is comparable with that of a commercial multiaxes forcesensor [13].
G. Effect of Number of Hidden Layers and Neurons
The effect of number of hidden layers and neurons on the NNperformance is investigated in the simulation. The results areshown in Figs. 11 and 12. The performance of employing twohidden layers is better than that of employing one hidden layer,even the extent is a little. Not to mention that too small numberof neurons, too large number of neurons is also not effective forincreasing the performance.
IV. FABRICATION OF PRACTICAL SENSOR
A. Fabrication Process and Result
Taking account of simulation results, a practical sensor deviceis designed, of which cross section including size is shown inFig. 13.
The fabrication process is as follows: Parylene (1 ) foranti-stiction layer is conformally deposited on a silicon wafer,

2052 IEEE SENSORS JOURNAL, VOL. 11, NO. 9, SEPTEMBER 2011
Fig. 11. Effect of neuron number on performance (simulation).
Fig. 12. Effect of neuron number of first and second hidden layers on perfor-mance (simulation). (a) Error of force direction. (b) Error of force magnitude.
Fig. 13. Cross section of practical sensor device.
the only function of which is to support the PDMS layer. Then,PDMS (500 ) is spin-coated at 400 rpm, 20 s [Fig. 14(a)].Au (0.1 ) is deposited for electrodes using the shadow maskmethod [Fig. 14(b)]. At this step, the lower structure is com-pleted [Fig. 14(c)]. The upper structure is also fabricated by thesame process.
Next, the spacer structure, which bears a number of concavespace serving as the gap between two electrodes of a capacitor,is fabricated. For this purpose, Parylene (1 ) is deposited onpatterned photoresist (20 ), then, PDMS (37 ) is spun onit [Fig. 14(d)].
The upper structure and the spacer structure are bondedwith each other by applying heat using a hot plate of 100 C[Fig. 14(e)].
The bonded structure is peeled off from the silicon wafer.Concave spaces are formed as negative of the patterned photore-sist [Fig. 14(f)]. The lower structure is bonded with the spacerstructure by applying heat. Each sealed concave space haslower and upper electrodes, forming a capacitor [Fig. 14(g)].The upper silicon wafer is taken away from the upper structure[Fig. 14(h)].
Fig. 14. Process flow of arrayed tactile sensor.
Fig. 15. Overview of fabricated sensor device.
The photograph of overview of fabricated sensor is shown inFig. 15. Gold electrodes for 9 ( ) capacitive sensing ele-ments are seen on a transparent PDMS sheet. Also, the bondingpads are seen, each of which is connected to three sensing ele-ments on a row or a column. By selecting a pad for a row andthat for a column, one sensing element on the intersection of therow and the column can be designated.
B. Performance of Fabricated Sensing Elements
The initial capacitance of each sensing element was esti-mated as 8.1 pF using a LCR meter (Agilent Corporation, TypeE4980A, resolution is 1 fF), which was almost equal to thetheoretical value of 8.0 pF. The sensitivity of each sensingelement was estimated by changing applied force using severalweights, e.g., 10, 50, 100, 150, and 200 gf. The result was5 fF/gf. The distributions of initial capacitances and sensitivi-ties among nine sensing elements were within 5%. In the use as

AOYAGI et al.: PROPOSAL AND DEVELOPMENT OF ARRAYED SOLE SENSOR FOR LEGGED ROBOT AND CONTACT FORCE DETECTION 2053
Fig. 16. Overview of experimental setup. (a) Schematic. (b) Photograph.
TABLE IIPERFORMANCE OF FABRICATED ONE SENSING ELEMENT
an arrayed sensor, however, the changes in capacitances ( )are input to a learned NN; then the components of force vectorapplied to the sole are obtained. Therefore, these distributionsare expected to be compensated by the generalization abilityof NN, as already confirmed in Section III-E by adding 5%random errors in the simulation.
Each sensing element is designed to detect the -directionalforce. Here, the cross-axis sensitivity of one sensing element,i.e., the sensitivity for other - (or -) directional force, is re-quired to be as small as possible. Considering the experimentaldifficulty, we estimated it by FEM simulation. When a shearingforce is applied on the sensor surface in horizontal direction,the upper electrode is slightly shifted laterally, decreasing theoverlapping area of facing two upper/lower electrodes and gen-erating . However, the simulated cross-axis sensitivity wasonly 4 , which can be neglected enough comparedto the abovementioned -directional sensitivity (5 fF/gf). Theperformance of one sensing element is summarized in Table II.
V. EXPERIMENT FOR PERFORMANCE ESTIMATION OF
FABRICATED SOLE SENSOR
A. Experimental Setup
The schematic and photographic overviews of the experi-mental setup are shown in Fig. 16(a) and (b), respectively. Thefabricated sensor is placed between the two hemispheric rubberballs, and the assembled ball is set in the hollow at the tip of therobot’s leg. The bottom surface of a stick is assumed to be thecontact area of the floor.
While the stick is kept to push against the rubber, it is fixedbetween the two horizontal rail parts tightly by screws. The di-rections of and are arbitrary defined by adjusting the hor-izontal and vertical angles of the stick. At the bottom of theexperimental setup, a commercial multiaxes force sensor (BL
TABLE IIIPERFORMANCE OF COMMERCIAL MULTIAXIS FORCE SENSOR
Autotech Corporation, Type MINI 4/20) is incorporated for thereference, of which specification is shown in Table III.
B. Confirmation of Capacitance Change (Comparison WithSimulation Data)
The stick was pushed against the sensor, then, the capacitancechange of each sensing element was measured one by one byusing the LCR meter. For coping with dynamic measurements,we have constructed a circuitry using two analogue switches forselecting row and column to designate an element, as shown inFig. 17. The serial selection of elements is done by a PIC miconsynchronously with a timer IC, the sampling time of which canbe set faster than 1 ms.
Knowing the applied force by the multiaxes force sensor, themultiphysic FEM simulation was carried out according to theprocedure mentioned in Section III-F, finally the capacitancechanges of all the sensing elements are simulated.
The results of comparison with measured and simu-lated capacitance changes of nine elements are shown inFig. 18(a) and (b), which are the case that .Looking at this figure, experimental distribution of capacitancechanges resembles simulation distribution.
The error may be mainly caused by the fabrication error ofthe sensor device, e.g., the gap length between the electrodes ofthe capacitive sensing element could not be achieved as the de-signed value. Another probable reason is that the error was dueto inaccuracy of the experimental setup. For example, assumethat the applied force direction be 45 vertically and its magni-tude be 100 gf, then the reference force sensor has possibility to

2054 IEEE SENSORS JOURNAL, VOL. 11, NO. 9, SEPTEMBER 2011
Fig. 17. Circuitry using two analogue switches for selecting row and columnto designate an element, which can cope with real-time measurements.
Fig. 18. Distribution of capacitance changes of sensing elements in the case of� � � and � � �� . (a) Detected by the developed sensor. (b) Simulationresults.
detect the angle with 6 error in the worst case, taking accountof force detecting resolution, as shown in Table III. The furtherinvestigation of the cause of the error and the improvement fordecreasing the error are left in the future work.
C. Detection of Components of Applied Force Vector(Comparison With Multiaxes Force Sensor)
The same procedure was carried out as mentioned inSection III-F using the experimental data of capacitancechanges. Training data set of 362 pairs of capacitance changes,in which , , and are variously changed, was preparedfrom the experimental data obtained by the fabricated practicalsensor. Verification data set of 180 pairs of capacitance changeswas also prepared from the experimental data in the same way.After the supervised learning of NN, the verification data set isapplied to the NN, then the NN outputs are compared with thedirection and the magnitude of the applied force.
The experimental results are shown in Fig. 19(a) and (b),which exhibit the error of force direction and the error of forcemagnitude, respectively. Looking at these figures, the resultantaveraged error of force direction is 15.9 , and that of force mag-nitude is 18.7 gf. These errors are larger than those obtained bythe simulation (see Section III-F. They were 2.4 and 5.3 gf,respectively). The errors are supposedly caused by both the fab-rication error and the reference error, as mentioned in the pre-vious paragraph. These errors should be decreased in the pro-
Fig. 19. Error distribution: (a) direction, and (b) magnitude (100 gf wasapplied).
Fig. 20. Surface area corresponding to experimental force directional error of15.9 .
jected work by improving the fabrication precision and em-ploying more precise reference sensor.
In the end, although the problem of non-negligible errors ex-ists, it is confirmed that the proposed sensor can detect roughlythe direction and the magnitude of the contact force. For simplecomprehension, the surface area corresponding to the experi-mental error of 15.9 is shown in Fig. 20. In this figure, theblack point shows the contact point at which the force is applied,and the black circumference shows the locus of intersections be-tween the force vectors with 15.9 error and the surface of theball.
The NN is effective for an ideal sensor in simulation; how-ever, it was not so effective for the actually fabricated MEMSsensor. Improving fabrication precision is one solution. Asanother solution, using many sensing elements over nine wouldbe effective for compensating the fabrication error thanks to

AOYAGI et al.: PROPOSAL AND DEVELOPMENT OF ARRAYED SOLE SENSOR FOR LEGGED ROBOT AND CONTACT FORCE DETECTION 2055
the generalization ability of NN, although the investigation onnumber of sensing elements in Section III indicates that toomany elements leads to the precision saturation for force com-ponents measurement. In another viewpoint, employing manyelements would be effective for obtaining other informationbesides force components, such as contact surface undulation,contact object shape and size, slippage, etc. [3]. The merits ofour fabricated sensor compared to the commercial multiaxesforce sensor is mainly the space efficiency which ensures theinstallation inside the robot’s sole at present state; however, theeffectiveness of arrayed type is expected to play an importantrole in several future robotic applications.
VI. CONCLUSION
An arrayed type tactile sensor made of flexible siliconerubber, which is based on MEMS technology, was developed.This sensor was applied as a sole sensor of a legged mobilerobot. By processing the force data from many sensing elementsby neural networks (NN), information of contact force, i.e.,three dimensional , , and components of force vector, isexpected to detect.
The sensor was practically fabricated and its performance wasinvestigated by both FEM simulation and experiment, in whichvarious forces are applied by changing its magnitude and di-rection. The averaged error in simulation was 2.4 and 5.3 gf,which are several percent of maximal applied values. Althoughthey were degraded to 15.9 and 18.7 gf in the experiment, thevalidity of the measuring principle and the basic potential for theapplication of the sole sensor of a legged robot were confirmed.
To reduce the practical errors, an approach to increase thesensitivity using a gelled polyurethane thin film is on going. ItsYoung’s modulus is 20 kPa, which is less than 1/100 comparedwith PDMS, and no gaps are provided between upper/lowerelectrodes for preventing stiction problems [14].
REFERENCES
[1] K. Inoue and K. Ooe, “Six-legged robots capable of locomotion andmanipulation in three modes,” in Proc. JSME Conf. Robot. Mech.,Nagano, Japan, 2008, 1A1-E04.
[2] D. Ono, T. Fukutani, and S. Aoyagi, “Development of an arrayed tactilesensor having four stories and recognition of contact state using neuralnetworks,” IEEJ Trans. SM, vol. 128, no. 5, pp. 246–251, 2008.
[3] T. Tanaka and S. Aoyagi, “Recognition of contact state of four layersarrayed type tactile sensor by supervised learning,” in Proc. JSMEConf. Robot. Mech., Waseda, Japan, 2006, 12A1-E29.
[4] T. Maeno, “Structure and function of finger pad and tactile receptors,”J. Robot. Soc. Jpn., vol. 18, no. 6, pp. 767–771, 2000.
[5] K. Kamiyama, H. Kajimoto, M. Inami, N. Kawakami, and S. Tachi,“Development of a vision-based tactile sensor,” Trans. Inst. Electr.Eng. Jpn., vol. 123, no. 1, pp. 16–22, 2003.
[6] L. Ascari, U. Bertocchi, P. Corradi, C. Laschi, and P. Dario, “Bio-in-spired grasp control in a robotic hand with massive sensorial input,”Biol. Cybern., vol. 100, no. 2, pp. 109–128, 2009.
[7] H. Takao, K. Sawada, and M. Ishida, “Multifunctional smart tac-tile-image sensor with integrated arrays of strain and temperaturesensors on single air-pressurized silicon diaphragm,” in Proc. IEEETransducers ’05, Seoul, Korea, 2005, pp. 45–48.
[8] B. J. Kane, M. R. Cutkosky, and G. A. Kovacs, “A tactile stress sensorarray for use in high-resolution robotic tactile imaging,” J. Microelec-tromech. Syst., vol. 9, no. 4, pp. 425–434, 2000.
[9] Y. Tanida, K. Abe, A. Konno, and M. Uchiyama, “Design and devel-opment of a H-slit type ground reaction force sensor for a humanoidrobot,” in Proc. JSME Conf. Robot. Mech., Nagoya, Japan, 2004,2A1-H-74.
[10] G. Kinoshita, T. Kimura, and M. Shimojo, “Dynamic sensing ex-periments of reaction force distributions on the sole of a walkinghumanoid robot,” in Proc. Intell. Robot. Syst., IROS’03, Oct. 27–31,2003, vol. 2, Proceedings. 2003 IEEE/RSJ International Conference,pp. 1413–1418.
[11] A. Sekiguchi, T. Suzuki, Y. Atobe, Y. Tsumaki, and D. N. Nenchev,“On the role of the foot shape of a humanoid robot,” in Proc. JSMEConf. Robot. Mech., Kobe, Japan, 2005, 1P2-S-043.
[12] M. Riedmiller and H. Braun, “A Direct adaptive method for faster back-propagation learning: The RPROP algorithm,” in Proc. IEEE Intl. Conf.Neural Networks, San Francisco, CA, 1993, pp. 586–591.
[13] BL AUTOTEC.LTD, Performance of Force Sensor (MINI 4/20).[Online]. Available: https://www.bl-autotec.co.jp/FA/01force/01_03_mini.html
[14] M. Suzuki, Y. Ikejiri, T. Fukutani, and S. Aoyagi, “Tactile sensor usinggelled poly-urethane ultrathin film,” in Proc. IEEE Sensors 2009 Conf.,Christchurch, New Zealand, Oct. 27, 2009, pp. 1297–1300.
Seiji Aoyagi (M’96) received the B.E., M.E., andPh.D. degrees in precision machinery engineeringfrom the University of Tokyo, Tokyo, Japan, in 1986,1988, and 1994, respectively.
From 1988 to 1995, he was with the MechanicalSystem Engineering Department, Kanazawa Univer-sity, Kanazawa, Japan as a Research Associate andan Associate Professor. He is currently a Full Pro-fessor with the Mechanical Engineering Department,Kansai University, Osaka, Japan. His current researchinterests are robotics, mechatronics, MEMS, with an
emphasis on sensors and actuators for micro robotics.
Takashi Matsuda received the B.E. degree in in-dustrial engineering from Kansai University, Osaka,Japan, in 2009.
His research activity was development of MEMStactile sensor and application of it to a robotic solesensing.
Tse-Wei Kong is currently working towards thePh.D. degree at the Department of MechanicalEngineering, Kansai University, Osaka, Japan.
His current research interest is development ofMEMS sensors for microrobotics.
Tatsuya Ishimaru is currently working towards thePh.D. degree at the Department of Mechanical Engi-neering, Kansai University, Osaka, Japan.
His current research interest is applications ofMEMS sensors for microrobotics.

2056 IEEE SENSORS JOURNAL, VOL. 11, NO. 9, SEPTEMBER 2011
Masato Suzuki received the B.E., M.E., and Ph.D.degrees in semiconductor engineering from Hi-roshima University, Hiroshima, Japan, in 2007,2004, and 2002, respectively.
From 2007 to 2008, he was with the ResearchCenter for Nonadevies and Materials, HiroshimaUniversity, as a Postdoctoral Fellow. He is currentlyan Assistant Professor with the Department ofMechanical Engineering, Kansai University, Osaka,Japan. His current researches are microsensors andmicroactuators.
Kenji Inoue received the B.E., M.E., and Ph.D. de-grees in precision engineering from the University ofTokyo, Tokyo, Japan, in 1986, 1988 and 1993, re-spectively.
In 1988, he joined the Department of Precision En-gineering, University of Tokyo, as a Research As-sociate. In 1993, he joined the Department of Me-chanical Engineering for Computer-Controlled Ma-chinery at Osaka University, Osaka, Japan, as a Re-search Associate and promoted to an Assistant Pro-fessor in 1995. In 2001, he was promoted to an As-
sociate Professor with the Department of Systems and Human Science, OsakaUniversity. Since 2007, he has been a Full Professor at the Department of Bio-System Engineering, Yamagata University, Yamagata, Japan. In 1998, he wasa Visiting Scholar at the University of California at Berkeley. His current re-search activities are focused on robotics and virtual reality: bio-inspired robots,e.g., six-legged robots and hybrid inchworm robots, micromanipulation systemfor biological cells, and haptic devices for presenting softness of virtual objects.
Dr. Inoue received the Best Paper Awards from the Virtual Reality Society ofJapan in 2004, from the Japan Society of Mechanical Engineers, Robotics andMechatronics Division, in 2006, and from the Human Interface Society in 2009.