Embed Size (px)
Citation preview
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 1
PROBLEMAS RESUELTOS N ª 2 PROB: 1 Refiriéndose al sistema en lazo cerrado de la figura 1, diseñe un compensador de
adelanto tal que el margen de fase sea 45°, el margen de ganancia no sea
menor que 8dB y la constante de error estático de velocidad sea . Represente las curvas de respuesta a un escalón unitario y a una rampa unitaria con MATLAB.
Sistema no compensado
MATLAB: num=[0 0 0 1];
den = [0.1 1.1 1 0];
sys=tf(num,den);
transf=(sys)/(sys+1);
step(transf)
grid
Repuesta ante un escalón unitario del sistema no compensado

EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 2
Vamos a utilizar el compensador de adelanto siguiente:
Ya que es especificado como , tenemos MATLAB:
grid
Hacemos K = 1 y definimos . Entonces
Ahora trazamos un diagrama de Bode de
Diagrama de bode de lazo abierto de KGp
num=[0 0 0 4];
den = [0.1 1.1 1 0];
bode(num,den);

EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 3
De éste gráfico, la fase y márgenes de ganancia son 17° y 8.7dB, respectivamente. Ya que las especificaciones requieren un margen de fase de 45°, vamos a elegir
Esto significa que 12° ha sido añadido al compensador para el cambio en la frecuencia del cruce de ganancia. La fase máxima de adelanto es de 40°. Dado que
Es determinado como 0.2174. Vamos a elegir, en lugar de 0.2174, a ser 0.21, o
El siguiente paso es determinar las frecuencias de esquina y del
compensador en adelanto. Tenga en cuenta que el máximo ángulo de adelanto de
fase se produce en la media geométrica de las dos frecuencias de corte, o .
El valor de la modificación en la curva de magnitud en debido a la inclusión
del término es
Tenemos en cuenta que
Tenemos que encontrar el punto de frecuencia donde, cuando el compensador de adelanto es añadido, la magnitud total se convierte en0 dB. La magnitud es-
6.7778dBcorresponde a . Seleccionamos esta frecuencia para ser la
nueva ganancia de cruce de frecuencia . Entonces obtenemos
Por lo tanto
Y
Así
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 4
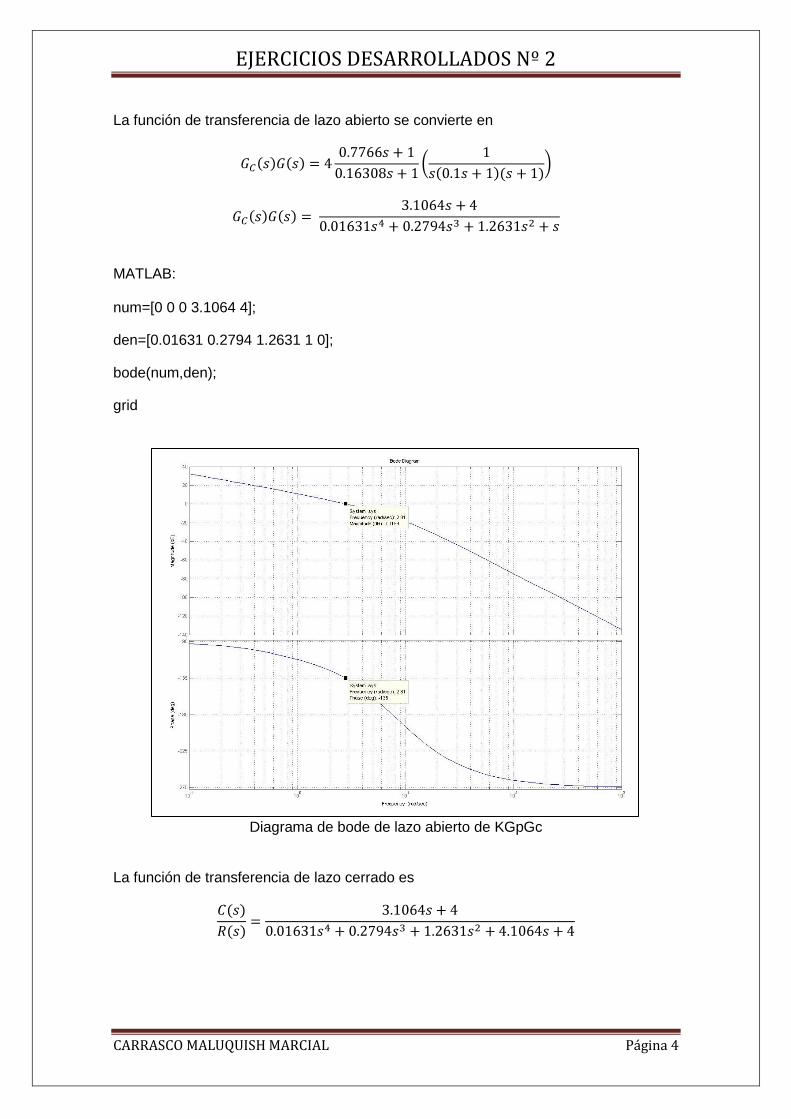
La función de transferencia de lazo abierto se convierte en
MATLAB: num=[0 0 0 3.1064 4];
den=[0.01631 0.2794 1.2631 1 0];
bode(num,den);
grid
Diagrama de bode de lazo abierto de KGpGc
La función de transferencia de lazo cerrado es
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 5
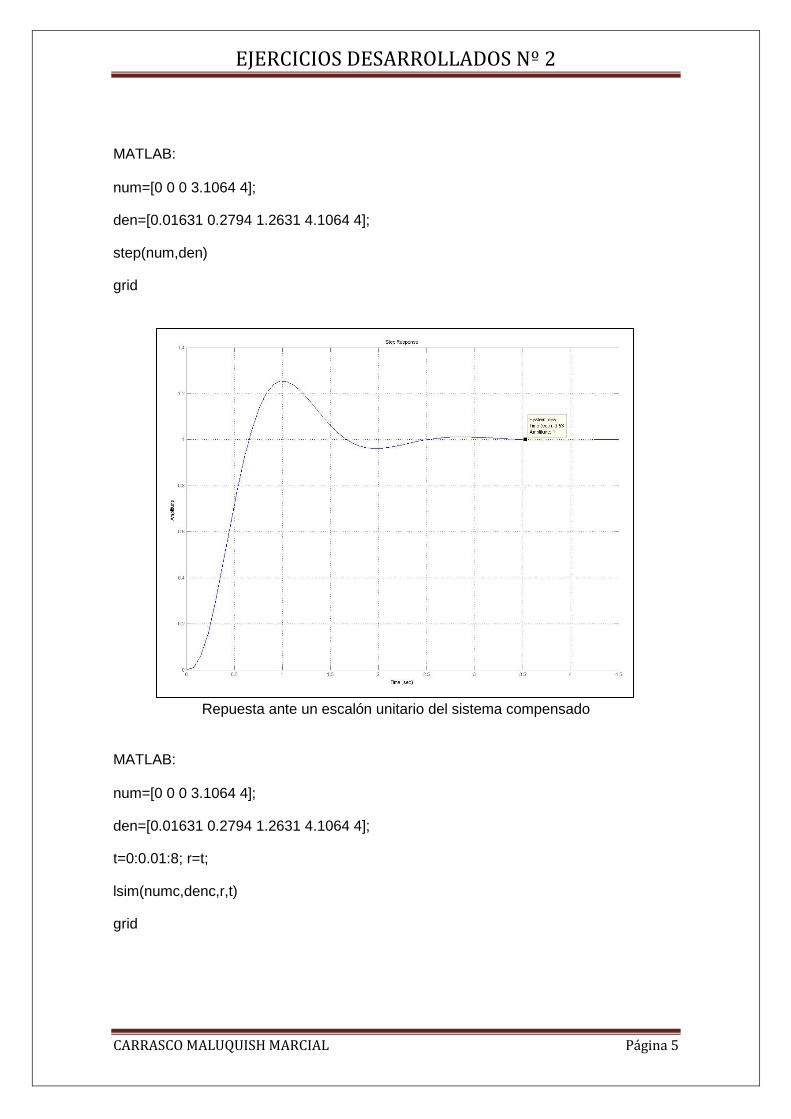
MATLAB: num=[0 0 0 3.1064 4];
den=[0.01631 0.2794 1.2631 4.1064 4];
step(num,den)
grid
Repuesta ante un escalón unitario del sistema compensado
MATLAB: num=[0 0 0 3.1064 4];
den=[0.01631 0.2794 1.2631 4.1064 4];
t=0:0.01:8; r=t;
lsim(numc,denc,r,t)
grid
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 6
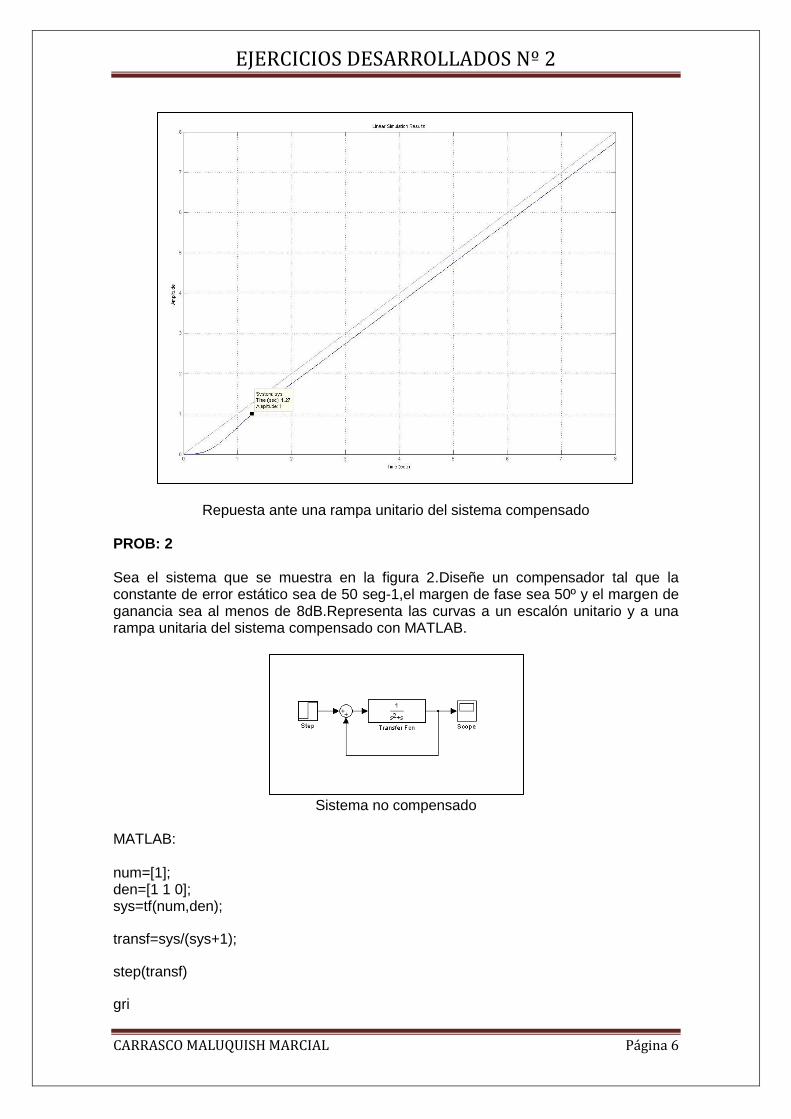
Repuesta ante una rampa unitario del sistema compensado PROB: 2 Sea el sistema que se muestra en la figura 2.Diseñe un compensador tal que la constante de error estático sea de 50 seg-1,el margen de fase sea 50º y el margen de ganancia sea al menos de 8dB.Representa las curvas a un escalón unitario y a una rampa unitaria del sistema compensado con MATLAB.
Sistema no compensado
MATLAB: num=[1]; den=[1 1 0]; sys=tf(num,den);
transf=sys/(sys+1);
step(transf)
gri
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 7
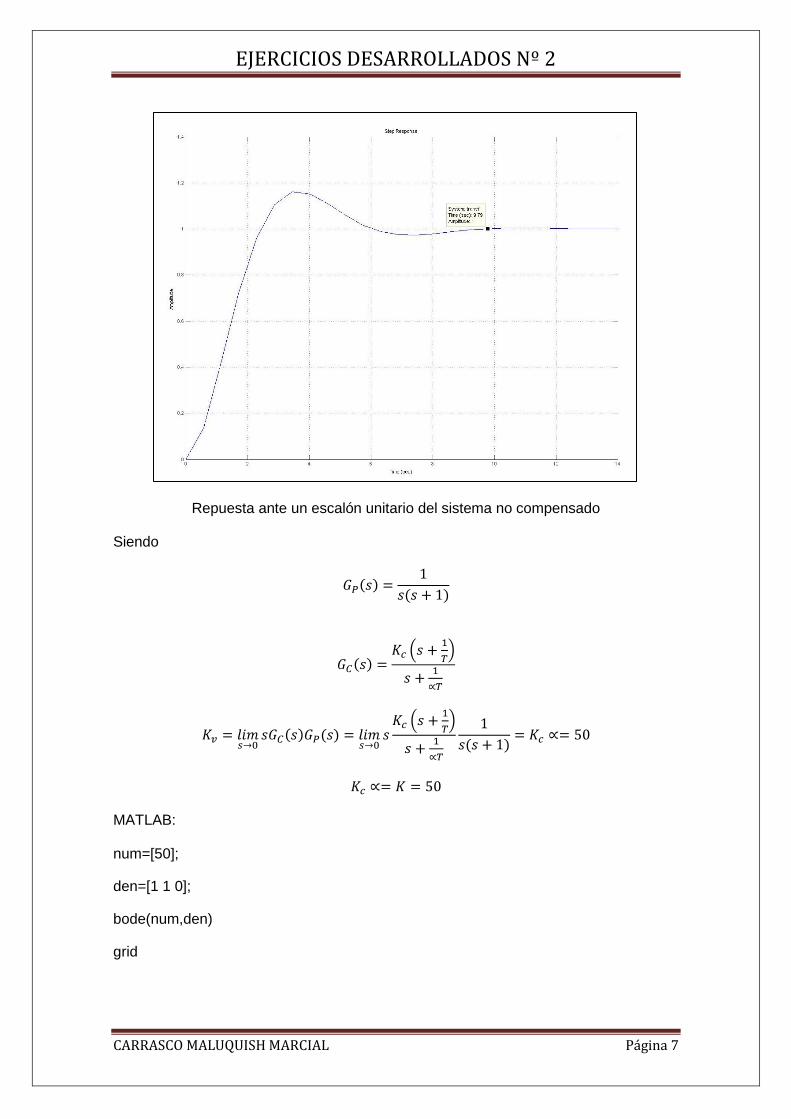
Repuesta ante un escalón unitario del sistema no compensado Siendo
MATLAB: num=[50];
den=[1 1 0];
bode(num,den)
grid
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 8
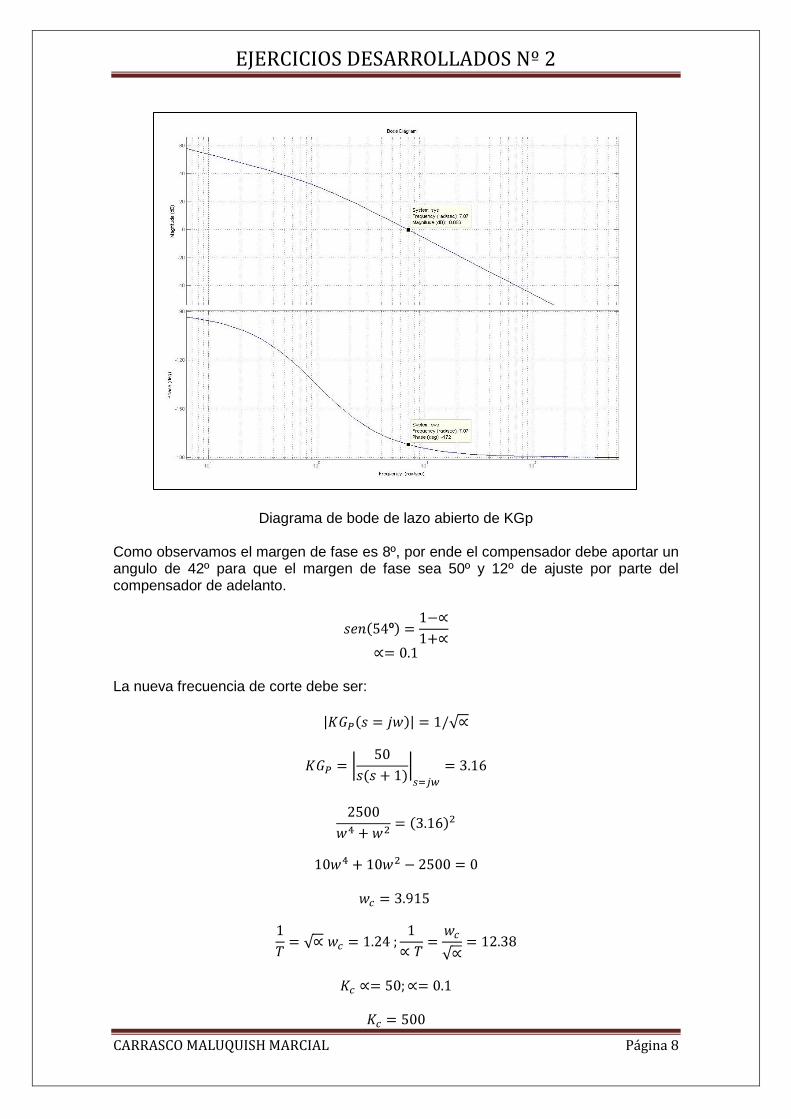
Diagrama de bode de lazo abierto de KGp Como observamos el margen de fase es 8º, por ende el compensador debe aportar un angulo de 42º para que el margen de fase sea 50º y 12º de ajuste por parte del compensador de adelanto.
La nueva frecuencia de corte debe ser:
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 9
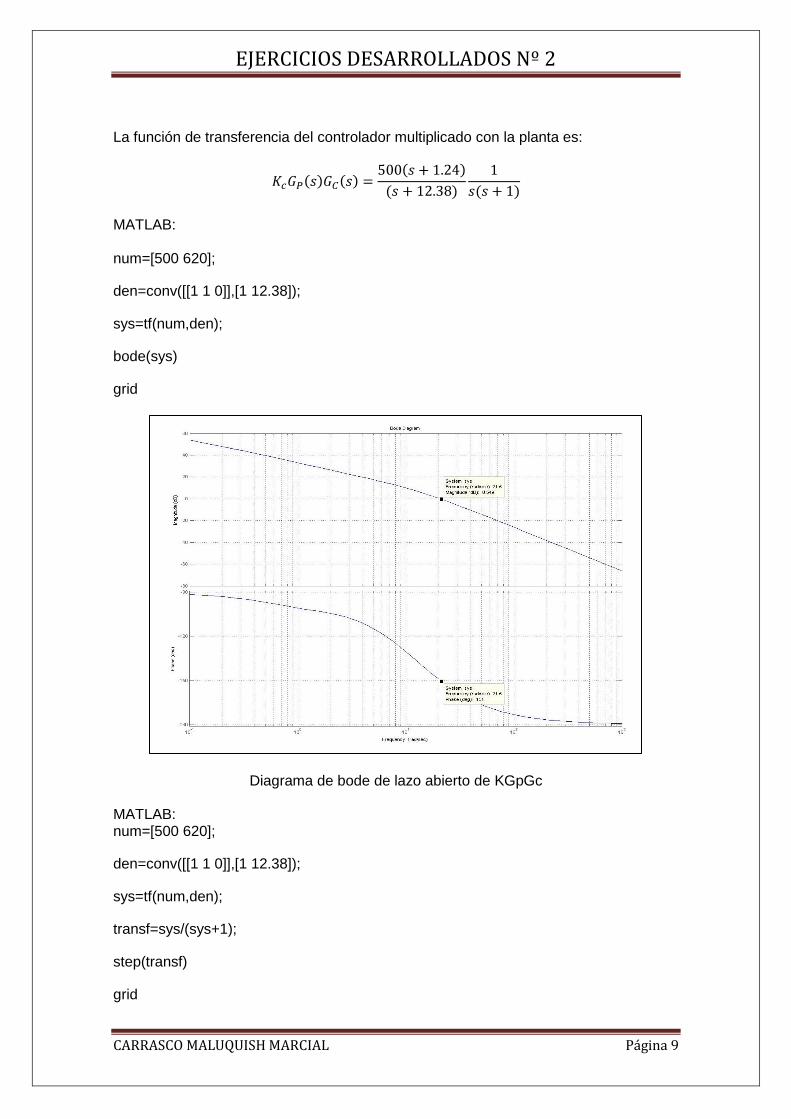
La función de transferencia del controlador multiplicado con la planta es:
MATLAB: num=[500 620];
den=conv([[1 1 0]],[1 12.38]);
sys=tf(num,den);
bode(sys)
grid
Diagrama de bode de lazo abierto de KGpGc MATLAB: num=[500 620];
den=conv([[1 1 0]],[1 12.38]);
sys=tf(num,den);
transf=sys/(sys+1);
step(transf)
grid
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 10
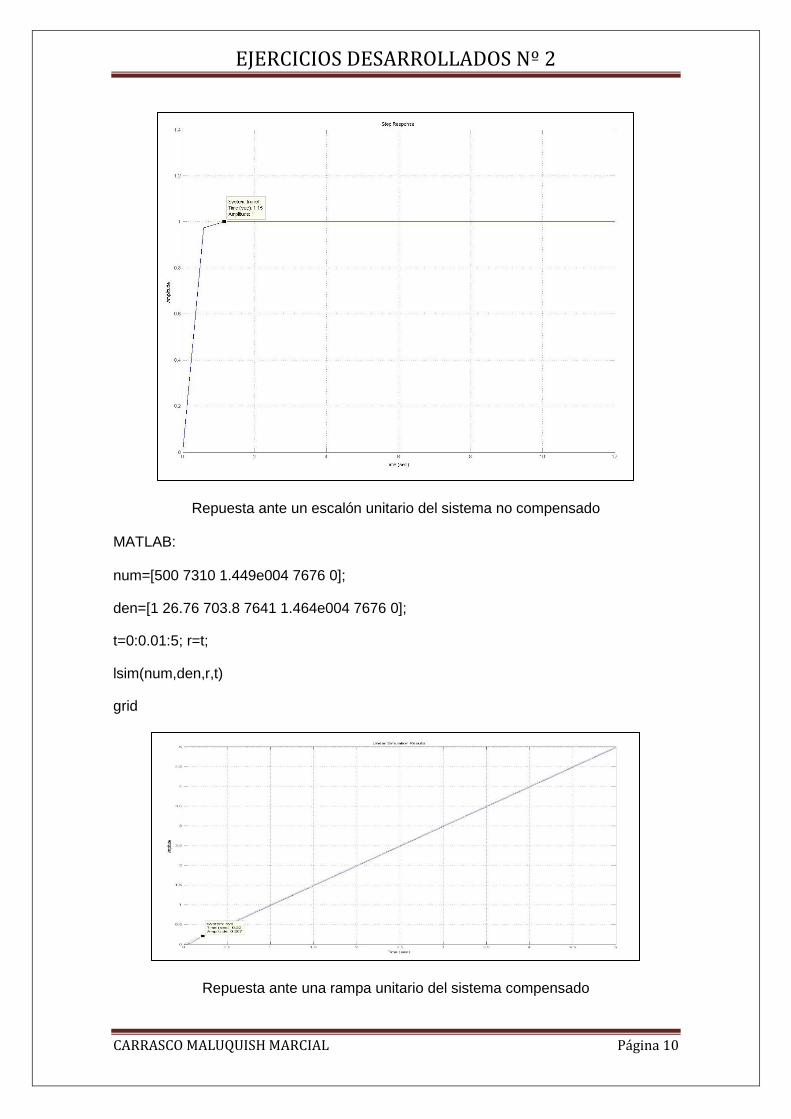
Repuesta ante un escalón unitario del sistema no compensado
MATLAB: num=[500 7310 1.449e004 7676 0];
den=[1 26.76 703.8 7641 1.464e004 7676 0];
t=0:0.01:5; r=t;
lsim(num,den,r,t)
grid
Repuesta ante una rampa unitario del sistema compensado
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 11
PROB: 3 Sea el sistema que se muestra en la figura 3.Diseñe un compensador tal que la constante de error estático sea de 4 seg-1,el margen de fase sea 50º y el margen de ganancia sea al menos de 10dB.Representa las curvas a un escalón unitario y a una rampa unitaria del sistema compensado con MATLAB. Asimismo, dibuje el diagrama de Nyquist del sistema compensado con MATLAB.
Sistema no compensado

EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 12
Siendo
Agregamos a la función de transferencia en lazo abierto,que es parte del controlador
para la simplificación al momento de hallar la constante de de error estatico de velocidad.
MATLAB: num=[0 1 0.1]; den=[1 0 1]; sys=tf(num,den); transf=sys/(sys+1); step(transf) grid
MATLAB: num=[0 0 40 4];
den=[1 0 1 0];
bode(num,den)
grid
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 13
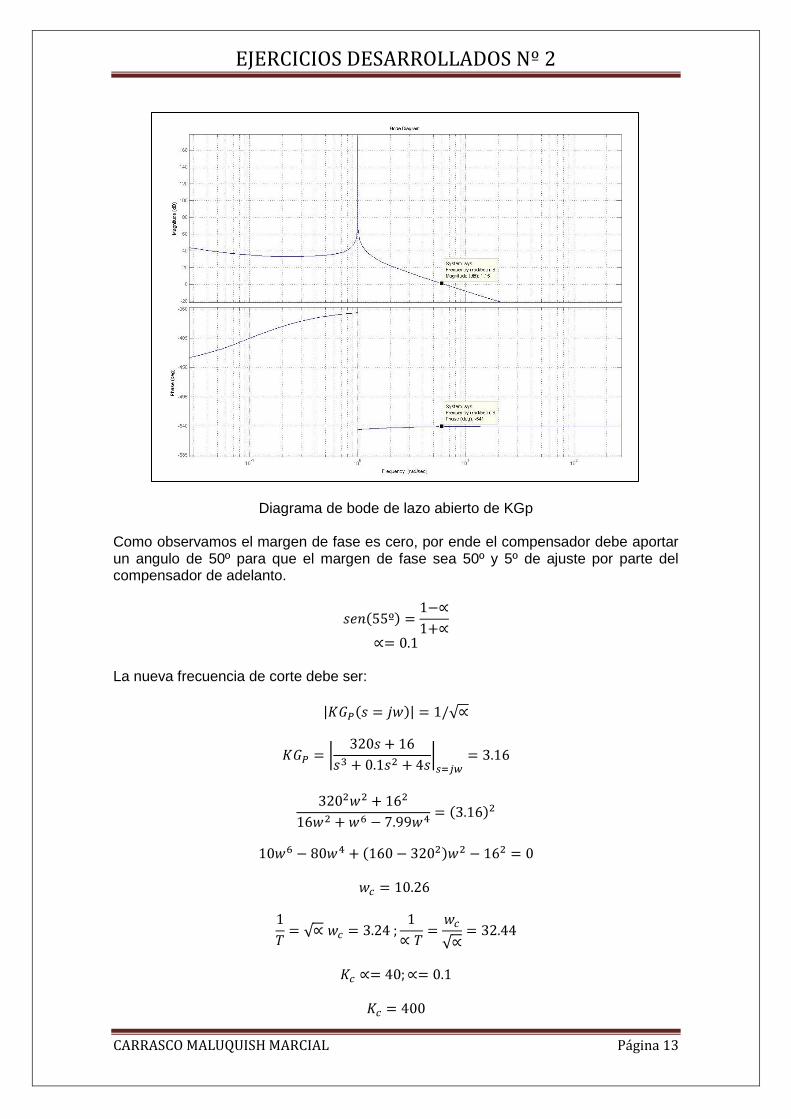
Diagrama de bode de lazo abierto de KGp Como observamos el margen de fase es cero, por ende el compensador debe aportar un angulo de 50º para que el margen de fase sea 50º y 5º de ajuste por parte del compensador de adelanto.
La nueva frecuencia de corte debe ser:
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 14
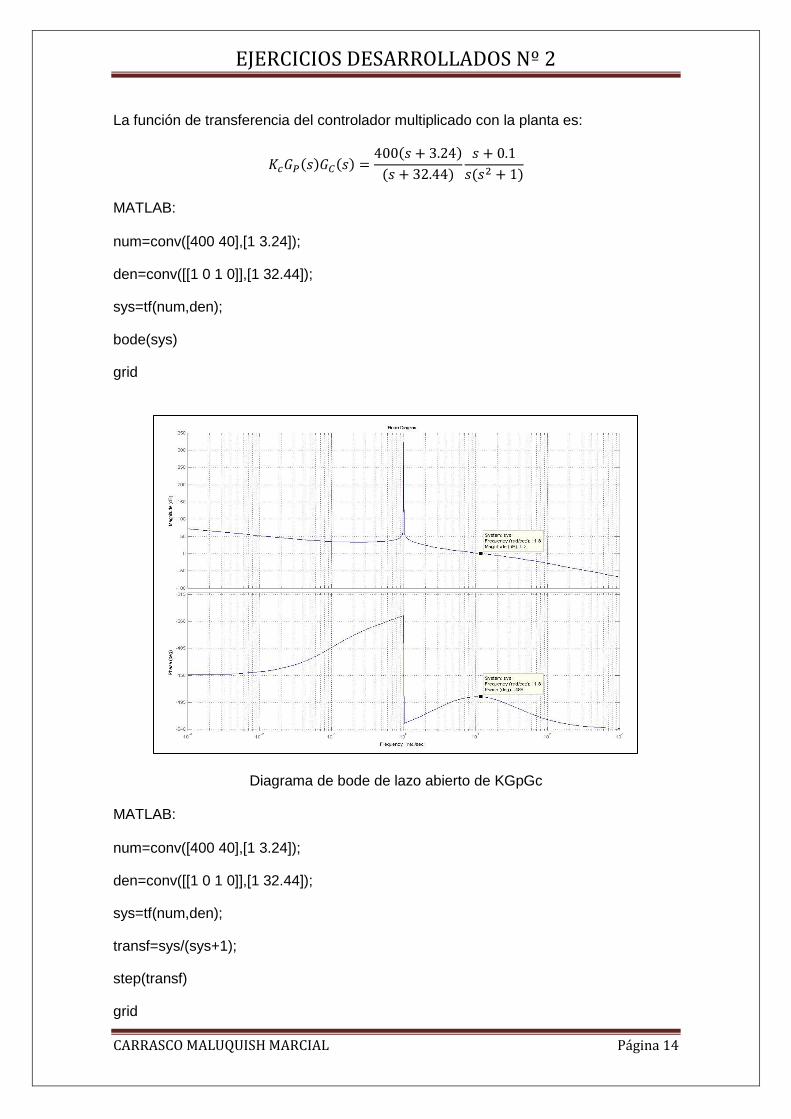
La función de transferencia del controlador multiplicado con la planta es:
MATLAB: num=conv([400 40],[1 3.24]);
den=conv([[1 0 1 0]],[1 32.44]);
sys=tf(num,den);
bode(sys)
grid
Diagrama de bode de lazo abierto de KGpGc MATLAB: num=conv([400 40],[1 3.24]);
den=conv([[1 0 1 0]],[1 32.44]);
sys=tf(num,den);
transf=sys/(sys+1);
step(transf)
grid
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 15
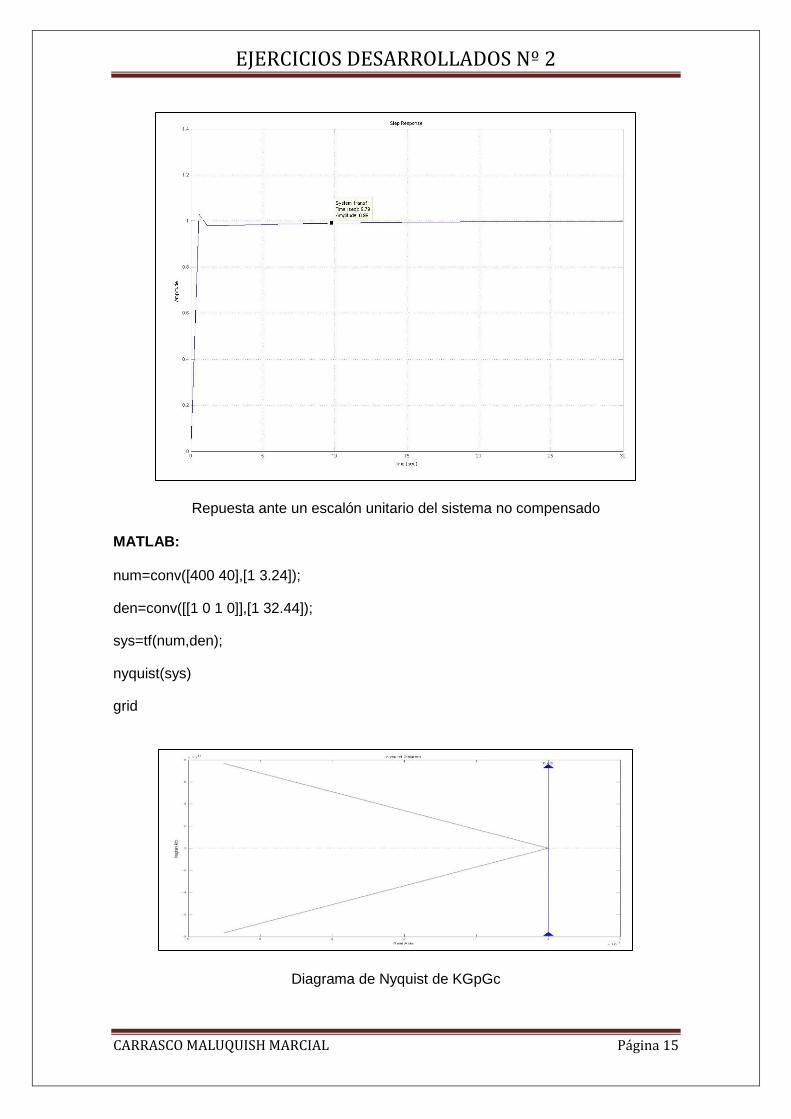
Repuesta ante un escalón unitario del sistema no compensado MATLAB: num=conv([400 40],[1 3.24]);
den=conv([[1 0 1 0]],[1 32.44]);
sys=tf(num,den);
nyquist(sys)
grid
Diagrama de Nyquist de KGpGc
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 16
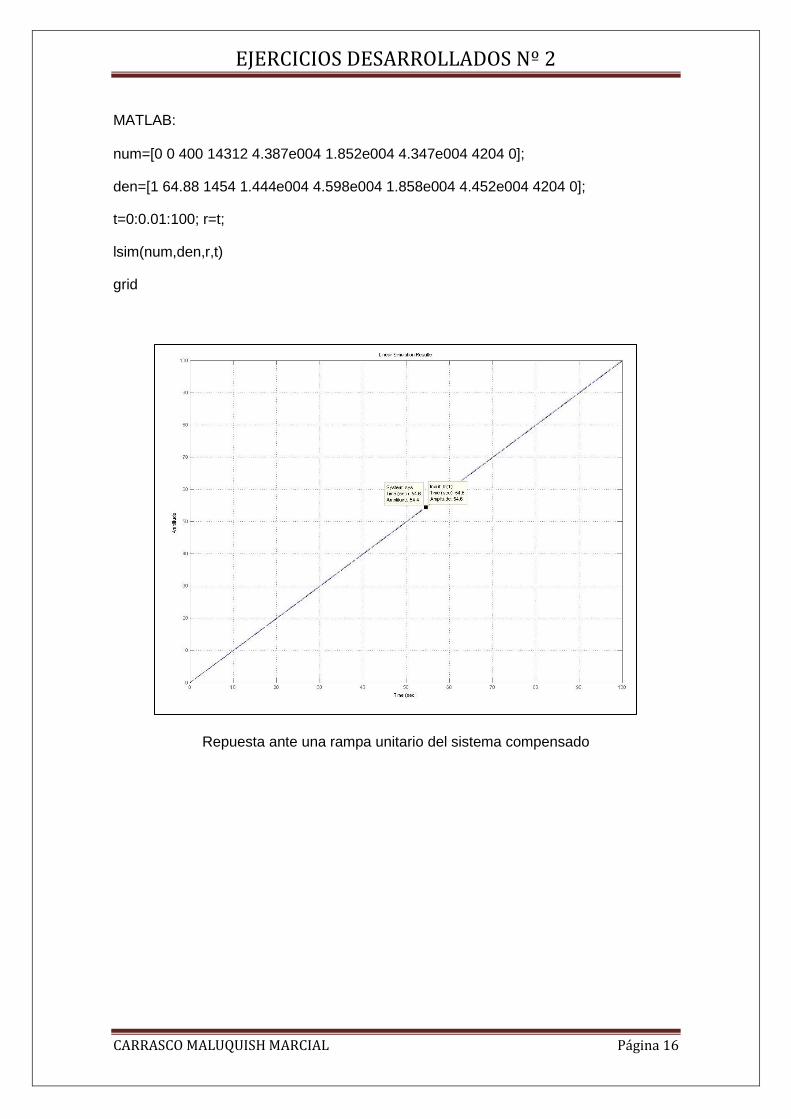
MATLAB: num=[0 0 400 14312 4.387e004 1.852e004 4.347e004 4204 0];
den=[1 64.88 1454 1.444e004 4.598e004 1.858e004 4.452e004 4204 0];
t=0:0.01:100; r=t;
lsim(num,den,r,t)
grid
Repuesta ante una rampa unitario del sistema compensado
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 17
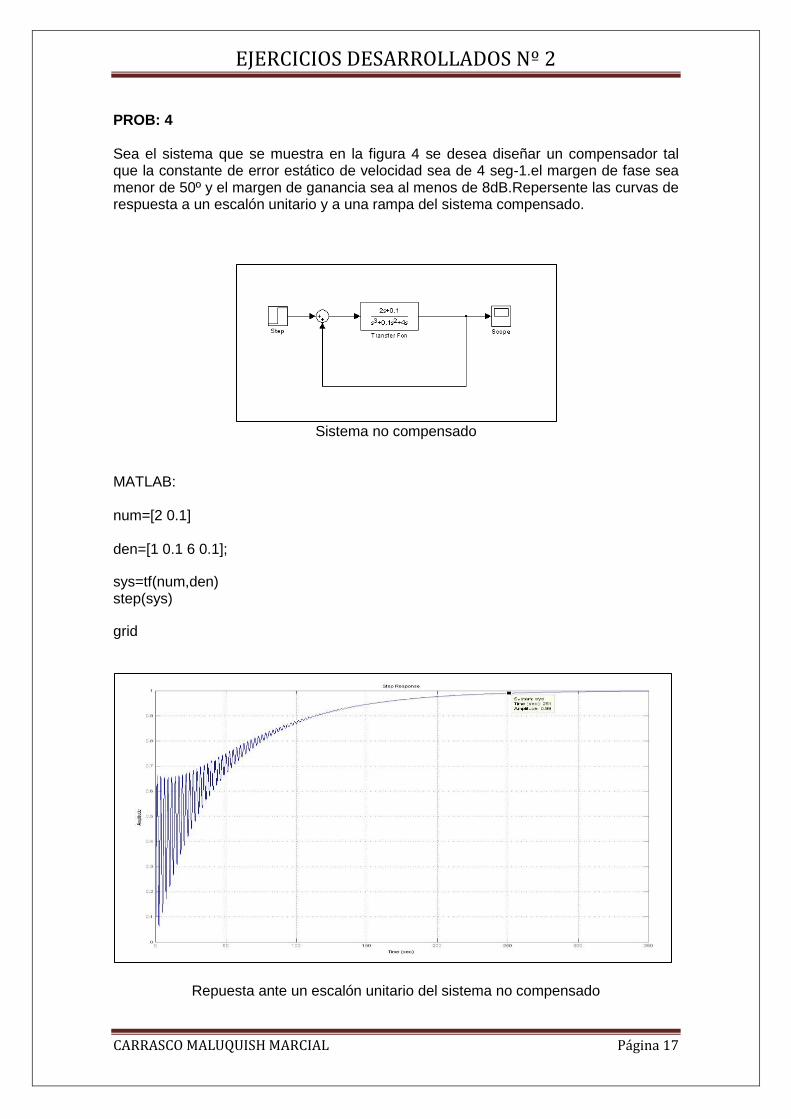
PROB: 4 Sea el sistema que se muestra en la figura 4 se desea diseñar un compensador tal que la constante de error estático de velocidad sea de 4 seg-1.el margen de fase sea menor de 50º y el margen de ganancia sea al menos de 8dB.Repersente las curvas de respuesta a un escalón unitario y a una rampa del sistema compensado.
Sistema no compensado
MATLAB: num=[2 0.1] den=[1 0.1 6 0.1];
sys=tf(num,den) step(sys)
grid
Repuesta ante un escalón unitario del sistema no compensado
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 18
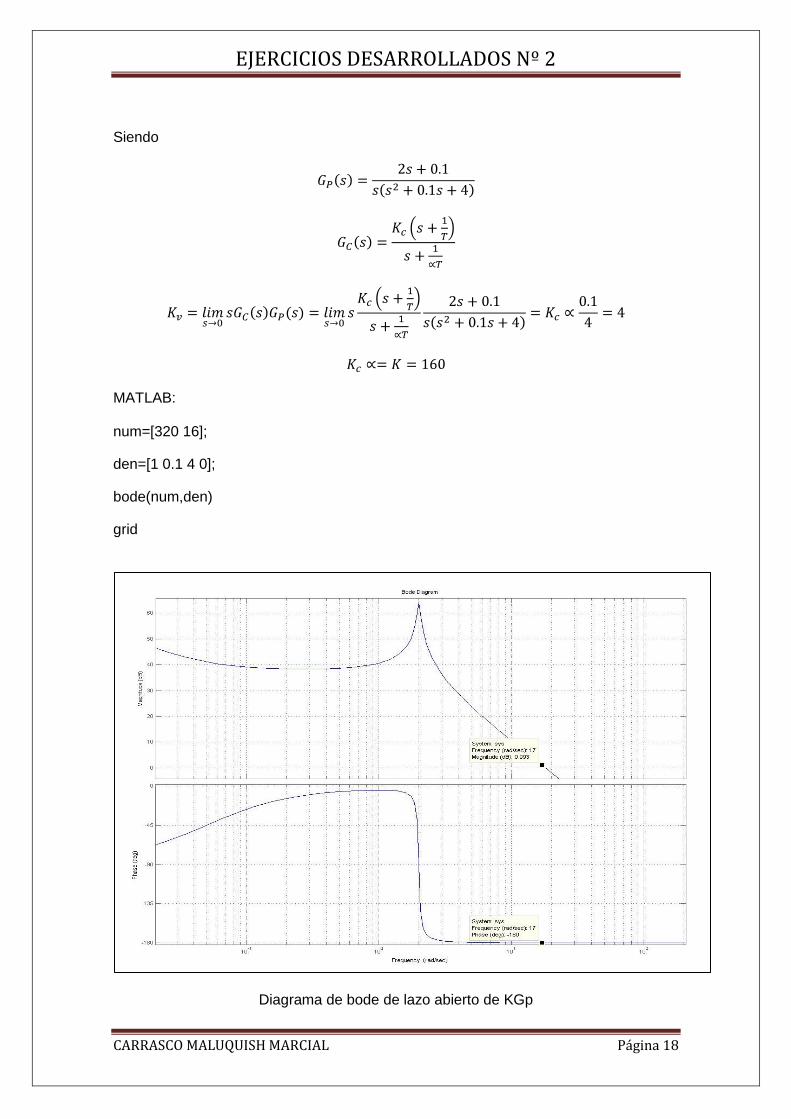
Siendo
MATLAB: num=[320 16];
den=[1 0.1 4 0];
bode(num,den)
grid
Diagrama de bode de lazo abierto de KGp

EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 19
Como observamos el margen de fase es cero, por ende el compensador debe aportar un angulo de 50º para que el margen de fase sea 50º y 5º de ajuste por parte del compensador de adelanto.
La nueva frecuencia de corte debe ser:
La función de transferencia del controlador multiplicado con la planta es:
MATLAB: num=conv([3200 160],[1 3.24]);
den=conv([1 0.1 4 0],[1 32.44]);
sys=tf(num,den);
bode(sys)
grid
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 20
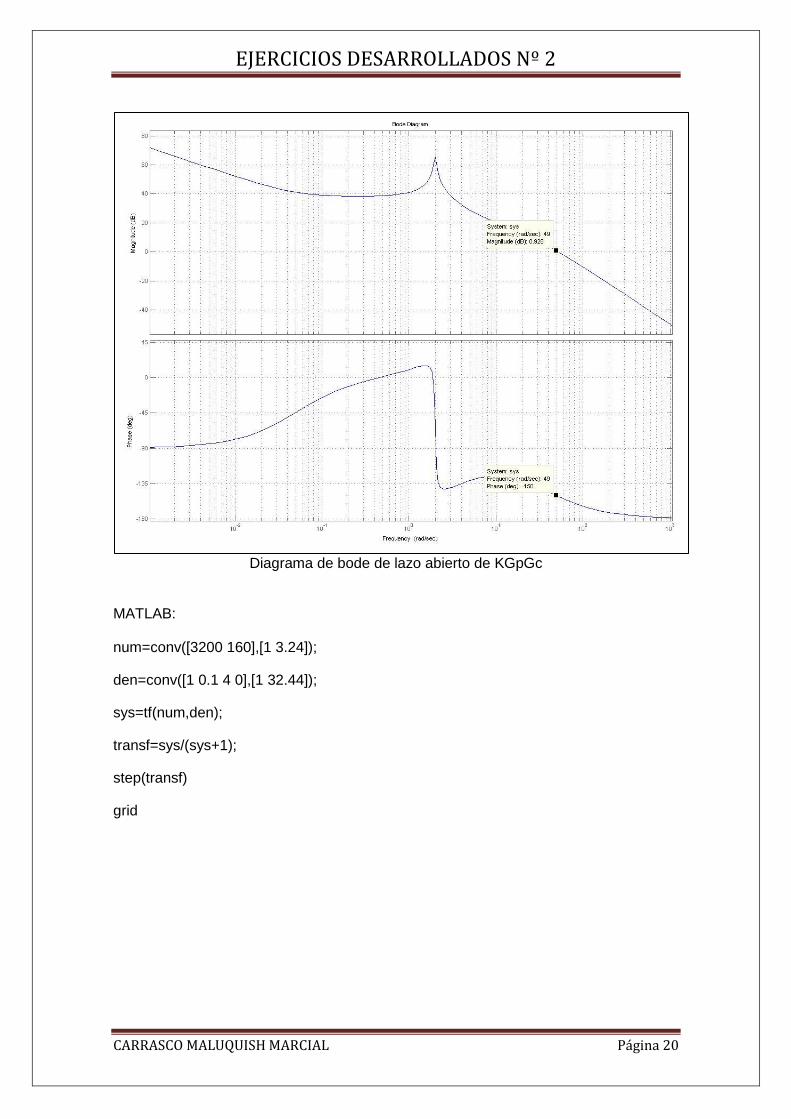
Diagrama de bode de lazo abierto de KGpGc
MATLAB: num=conv([3200 160],[1 3.24]);
den=conv([1 0.1 4 0],[1 32.44]);
sys=tf(num,den);
transf=sys/(sys+1);
step(transf)
grid
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 21
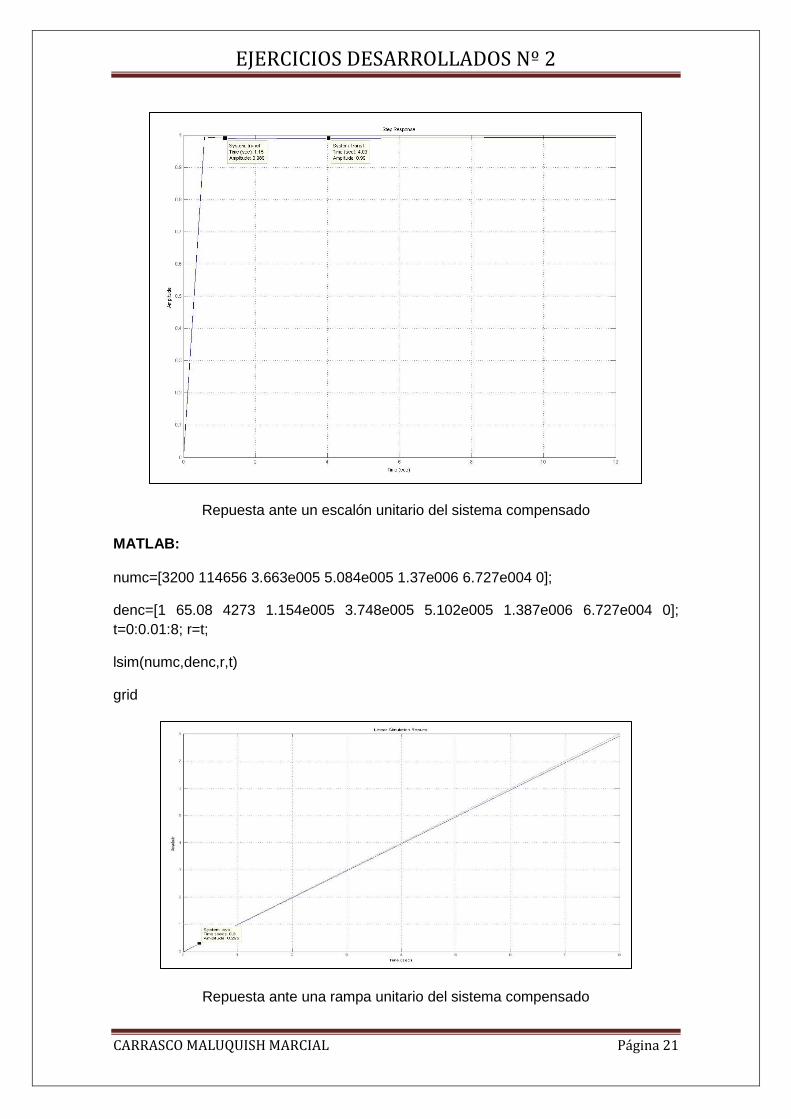
Repuesta ante un escalón unitario del sistema compensado
MATLAB: numc=[3200 114656 3.663e005 5.084e005 1.37e006 6.727e004 0];
denc=[1 65.08 4273 1.154e005 3.748e005 5.102e005 1.387e006 6.727e004 0];
t=0:0.01:8; r=t;
lsim(numc,denc,r,t)
grid
Repuesta ante una rampa unitario del sistema compensado
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 22
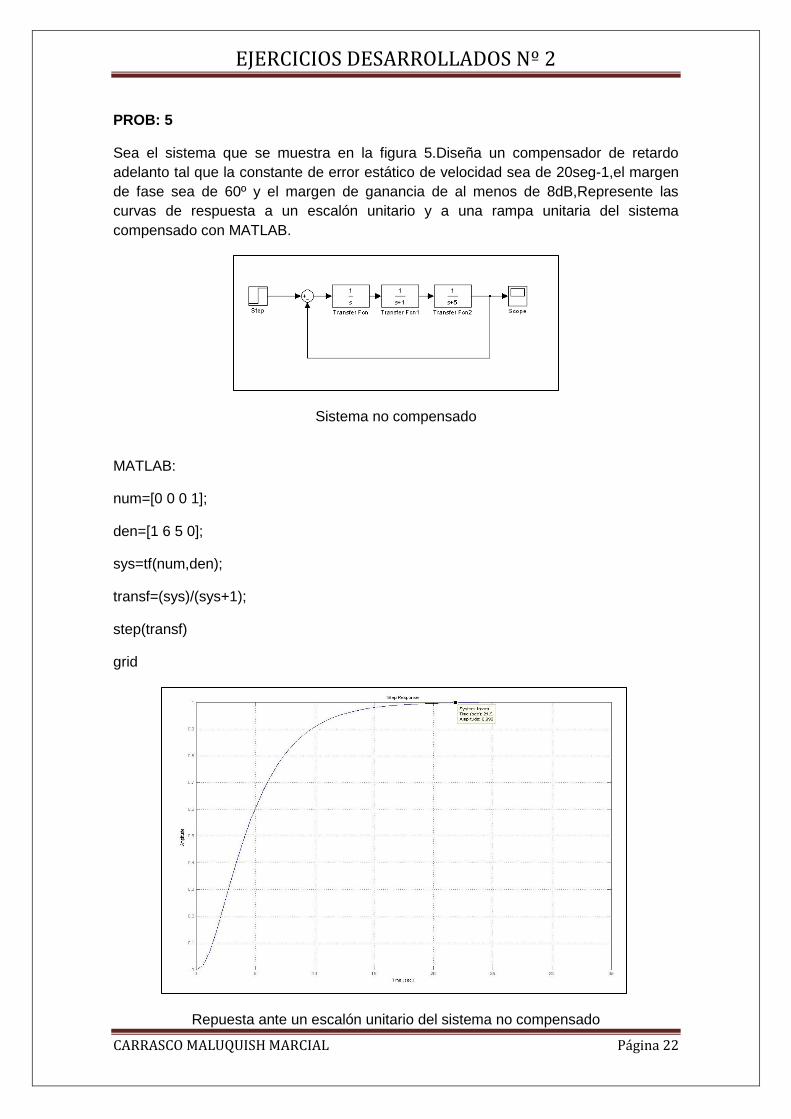
PROB: 5
Sea el sistema que se muestra en la figura 5.Diseña un compensador de retardo
adelanto tal que la constante de error estático de velocidad sea de 20seg-1,el margen
de fase sea de 60º y el margen de ganancia de al menos de 8dB,Represente las
curvas de respuesta a un escalón unitario y a una rampa unitaria del sistema
compensado con MATLAB.
Sistema no compensado
MATLAB:
num=[0 0 0 1];
den=[1 6 5 0];
sys=tf(num,den);
transf=(sys)/(sys+1);
step(transf)
grid
Repuesta ante un escalón unitario del sistema no compensado
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 23
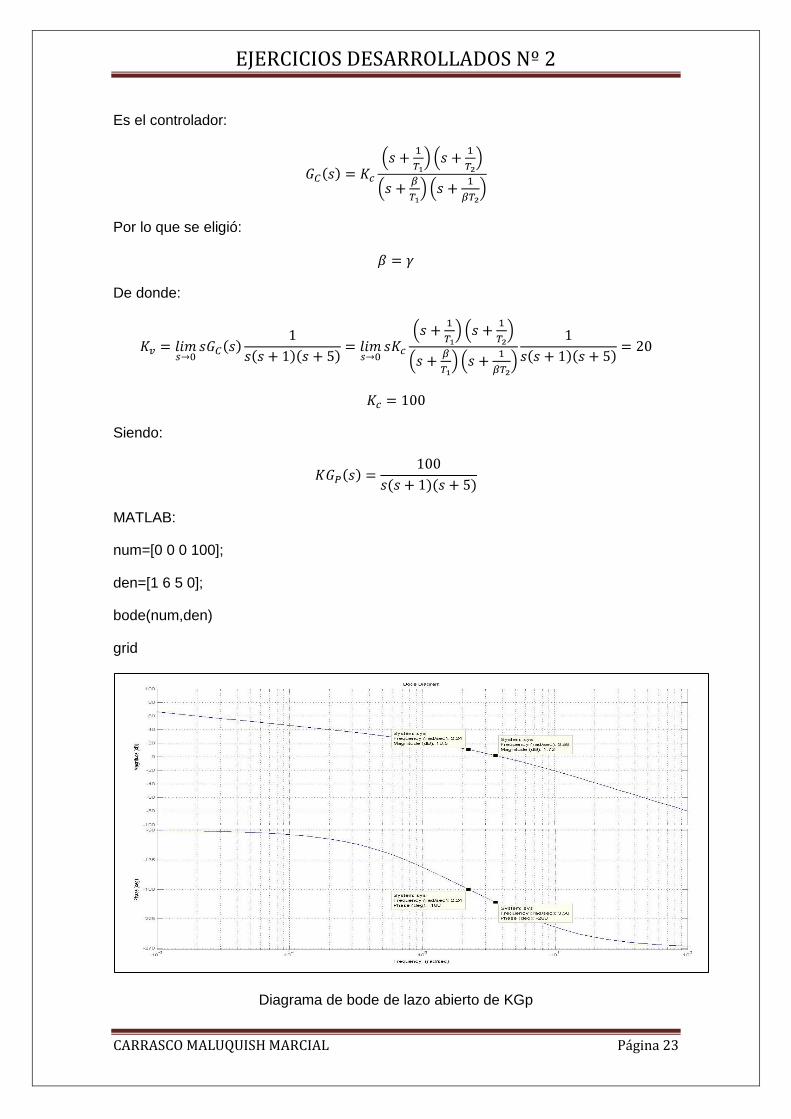
Es el controlador:
Por lo que se eligió:
De donde:
Siendo:
MATLAB:
num=[0 0 0 100];
den=[1 6 5 0];
bode(num,den)
grid
Diagrama de bode de lazo abierto de KGp

EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 24
De acuerdo al diagrama de bode elegimos la nueva frecuencia de corte donde el
margen de fase es 0, por ende esta nueva frecuencia radial es de 2.24 rad/s alrededor
de 60ª,en la que por el compensador tanto de retardo y de adelanto se agrega 5ª más,
quedando 65ª,
Donde:
De la que:
Por lo que obtenemos la función de transferencia del compensador de retardo:
Para la función de transferencia del compensador de adelanto, para la nueva
frecuencia, que es 1.5 rad/s su ganancia es 10.5dB,por lo que a partir de esta
,debemos encontrar una línea recta de pendiente 20dB/década ,que pase por el punto
(2.24 rad/s,--10.5dB).
La recta tendrá la forma de:
La recta tendrá la forma de:
Esta al interceptarse con las líneas de 0dB y --20dB, determinan las frecuencias de
esquinas

EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 25
Por lo que:
Obteniendo finalmente:
Siendo la función de transferencia en lazo abierto:
MATLAB:
num=conv([100 75],[1 0.224]);
den1=conv([1 7.46],[1 0.011]);
den=conv(den1,[1 6 5 0]);
bode(num,den)
grid
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 26
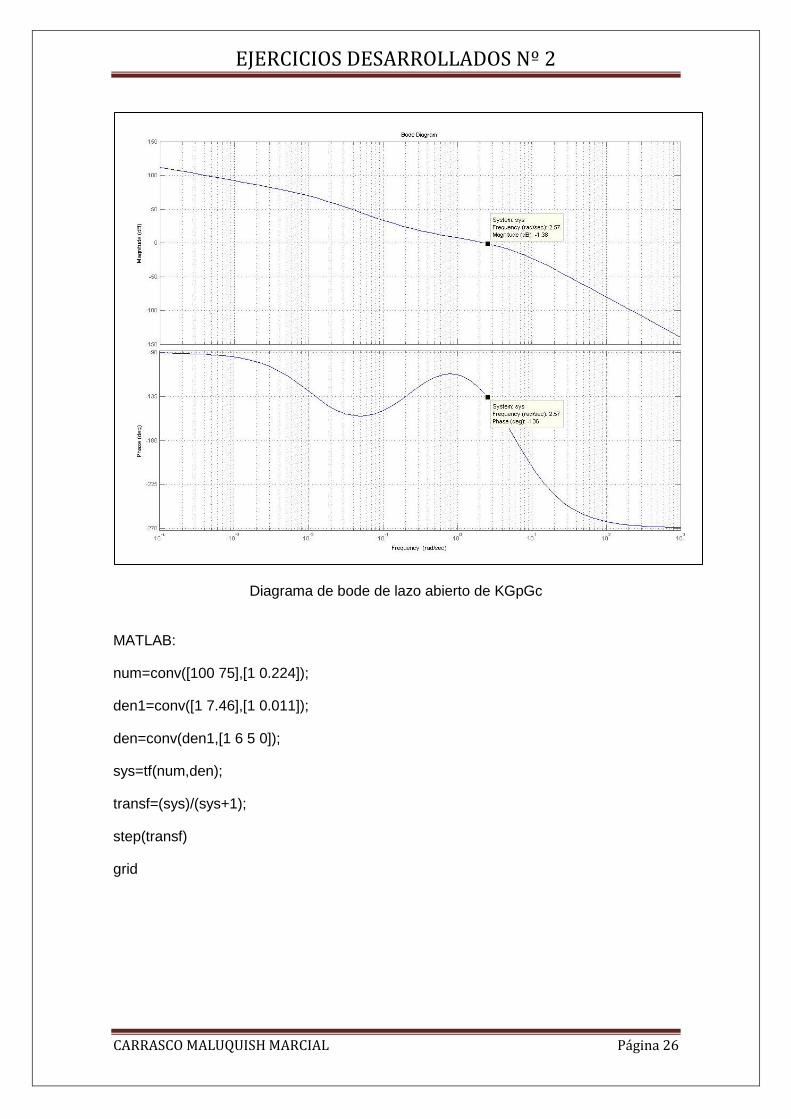
Diagrama de bode de lazo abierto de KGpGc
MATLAB:
num=conv([100 75],[1 0.224]);
den1=conv([1 7.46],[1 0.011]);
den=conv(den1,[1 6 5 0]);
sys=tf(num,den);
transf=(sys)/(sys+1);
step(transf)
grid
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 27
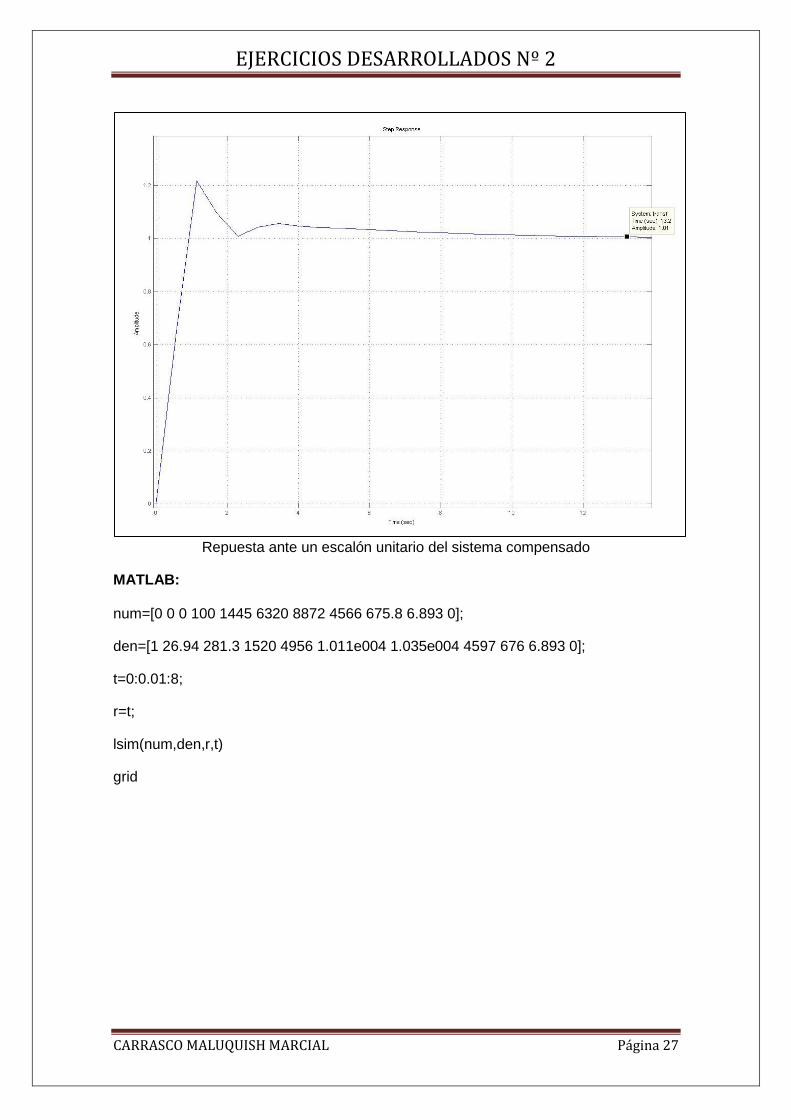
Repuesta ante un escalón unitario del sistema compensado
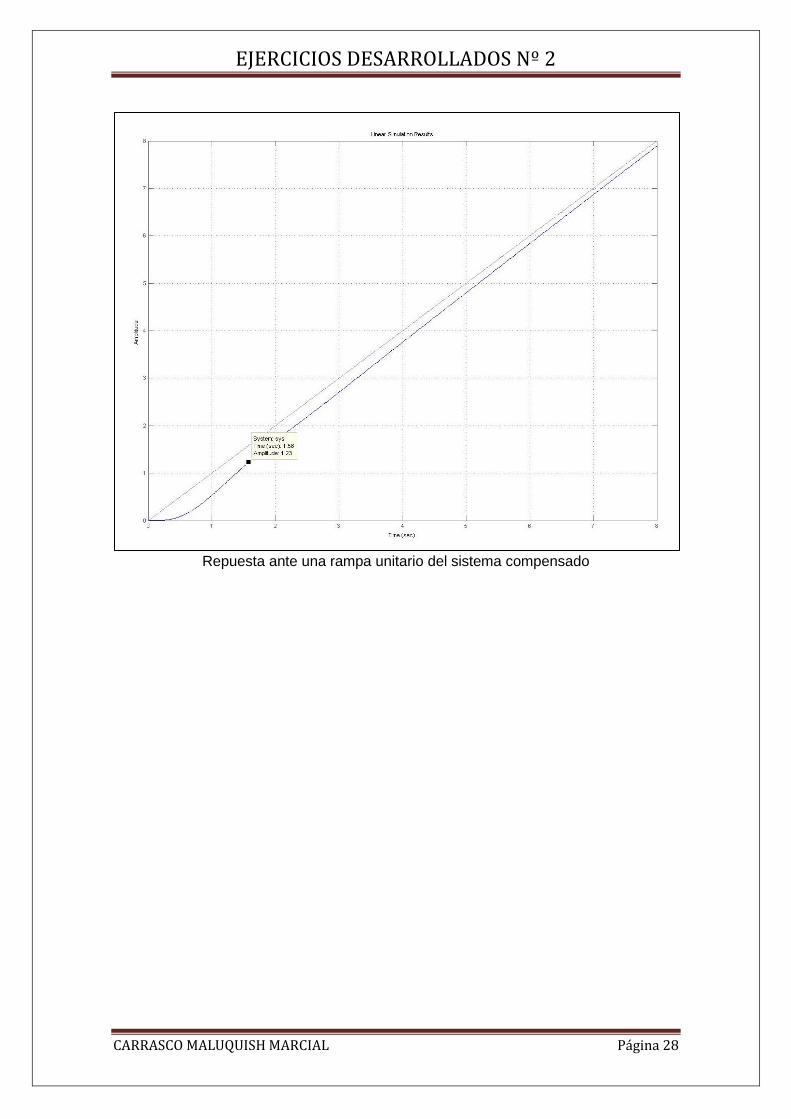
MATLAB: num=[0 0 0 100 1445 6320 8872 4566 675.8 6.893 0];
den=[1 26.94 281.3 1520 4956 1.011e004 1.035e004 4597 676 6.893 0];
t=0:0.01:8;
r=t;
lsim(num,den,r,t)
grid
EJERCICIOS DESARROLLADOS Nº 2
CARRASCO MALUQUISH MARCIAL Página 28
Repuesta ante una rampa unitario del sistema compensado





























