Embed Size (px)
Citation preview

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 1 -
CAPITOLO 3 LA TEORIA DEL DEFLUSSO PER UN SISTEMA A
DENSITA' CONTROLLATA - IL SISTEMA FERROVIARIO
3.1 Il sistema ferroviario è un sistema a densità controllata e a guida vincolata. Ciò significa che il legame velocità-densità non è affidato al conducente ma è preordinato e rigorosamente rispettato. In questi sistemi i mezzi di regolazione e controllo della circolazione debbono provvedere ad evitare incidenti anche in caso di errore da parte dell'uomo, anche se non possono assicurare il proseguimento della marcia. Sono già stati realizzati anche dei sistemi di regolazione e controllo (S.R.C.) spinto fino al punto di assicurare una marcia completamente automatica; tali sistemi debbono essere composti da elementi di assunzione dei dati relativi alla linea, da elementi di elaborazione dei dati stessi, e da elementi che trasformino i dati elaborati in comandi per la marcia dei veicoli sulla linea (es. Metropolitane leggere automatiche di Brescia e Torino e quella in corso di realizzazione a Roma – linea C; people mover aeroportuali, etc). L'analogia tra i sistemi a guida libera e quelli a guida vincolata sta nel fatto che in entrambi i casi il legame tra velocità e densità [V-d]è basato su un criterio di sicurezza. Tuttavia mentre nel primo caso la sicurezza viene interpretata soggettivamente dal singolo utente, nel secondo caso il legame V-d è rigido. In campo stradale la sicurezza è legata alla possibilità da parte dell'utente di arrestarsi in uno spazio utile; spesso la condotta di marcia di un utente si adegua semplicemente alla marcia dell'utente che lo precede e tra essi non esiste un distanziamento pari alla distanza di arresto ma minore di essa. In campo ferroviario invece la necessità di assicurare un servizio il più sicuro possibile ha portato ad un irrigidimento delle norme sulla circolazione. Esistendo la possibilità dello svio di un convoglio ed essendo questo accompagnato dall'arresto dello stesso in pochissimi metri, si deve sempre assicurare tra un treno ed il successivo un distanziamento pari alla distanza di arresto. Questo almeno per quel che riguarda la marcia in linea. Per quanto riguarda quindi il distanziamento tra i veicoli possiamo scrivere in generale:
d = d'arresto . α (1)
dove il coefficiente α è in ferrovia sempre maggiore di 1 ed è funzione del sistema di
regolazione e controllo.
Allora se L = lunghezza del convoglio e d = distanza di arresto, il distanziamento dei veicoli (testa-testa) sarà:
d = L + α . da (2)

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 2 -
Essendo:
τ = Σ tp = R
m (vedi successivo paragrafo 3.4)
si ottiene:
Poiché l'equazione fondamentale del deflusso trovata per un sistema a densità libera: Q = δ . V è ancora valida per un sistema a densità controllata e poiché, come abbiamo visto, δ = 1/d si ha:
In un sistema a densità controllata tutto è regolato dall'esterno, in questo caso V non è la velocità media rispetto allo spazio, assunta nel caso stradale,, ma è la velocità effettiva dei veicoli e d è la distanza reciproca degli stessi. Ora in corrispondenza a valori diversi da quelli critici, fissata la portata, aumentare la qualità del servizio significa anche qui aumentare la velocità, cioè agire su tutte le componenti del sistema, come nel campo stradale. E' necessario ricordare che in campo stradale la capacità dipendeva solo dalle caratteristiche tecniche dell'infrastruttura, dato per scontato il comportamento dell'utente, e che accanto alle caratteristiche tecniche dell'infrastruttura occorreva considerare anche le prestazioni dei mezzi, in ogni caso però, date per scontate anche queste, la capacità dipendeva dalle caratteristiche tecniche dell'infrastruttura. Nel sistema a densità controllata accanto alle caratteristiche dell'infrastruttura, che si riflettono nella velocità che è possibile raggiungere, compare la caratteristica del sistema di regolazione e controllo, che a seconda della sua raffinatezza, consente, a parità di flusso, capacità maggiori in senso assoluto e in definitiva anche velocità critiche maggiori. Accanto alla portata espressa in veicoli/ora, vanno anche considerate le portate espresse in posti offerti/ora; questo ha importanza perché nella equazione 5 compare esplicitamente la lunghezza del mezzo e, a parità di tutte le altre condizioni, all'aumentare di L diminuisce il numero di convogli in grado di transitare sulla linea. Dall'altra parte l'aumento di L comporta l'aumento del numero di posti relativi a ciascun convoglio che transita. Caso per caso sarà quindi necessario stabilire l'incidenza della lunghezza sulla:
v2
d = L + α (----- + v τ) (4)
2a
v v Q = ---- = ------------------ (5)
d L + α ( v2 + v τ) 2a
v2
da = -- + v τ [τ = tempo di reazione] (3)
2a

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 3 -
- portata in passeggeri - portata in posti offerti - portata in veicoli 3.2 SISTEMI DI REGOLAZIONE E CONTROLLO DELLA CIRCOLAZIONE [SRC] E' necessario ricordare la posizione iniziale del problema: si vuole escludere nel modo più asso-luto la collisione tra due treni, nell'ipotesi che possa verificarsi che un treno qualunque si arresti istantaneamente (svio). Storicamente (ma ancora si usa nelle linee poco importanti e di scarso flusso) si usava il metodo chiamato del giunto telefonico o telegrafico tra stazioni successive, per cui un treno non poteva partire dalla stazione finché non giungeva la comunicazione telefonica o telegrafica che il treno partito precedentemente era arrivato nella stazione successiva. In questo modo si garantiva al treno in partenza che tutta la sezione tra le due stazioni successive era libera. In questi metodi è già presente il concetto di fondo dei sistemi di regolazione e controllo, e cioè che: PRINCIPIO GENERALE DELLA SICUREZZA NEI SISTEMI A DENSITA’ CONTROLLATA: “un treno non può entrare in una data sezione della linea se non sa che essa è libera da altri treni. Si introduce così il concetto di sezione di distanziamento” La raffinatezza del sistema di SRC consiste nella maggiore o minore estensione di tale sezione. Vediamo ora più in dettaglio le soluzioni possibili. Se consideriamo ad esempio una linea a semplice binario , dove i treni debbono alternarsi nelle due direzioni, diventa privo di significato parlare di alfa come coefficiente legato alla distanza di arresto in quanto, poiché i treni non possono che incontrarsi in corrispondenza di punti in cui è possibile lo scambio, è evidente che la distanza minima tra i treni corrisponde allo spazio tra tali punti e al tempo necessario per percorrere questo spazio. A questo punto, per aumentare la capacità della linea, se le necessità del servizio lo richiedono, si possono mandare un certo numero di treni in una direzione e poi un altro numero di treni nella direzione opposta, facendo viaggiare i treni uno di seguito all'altro ad una distanza minima e cioè chiamando ancora una volta in causa il coefficiente alfa legato alla soluzione tecnica, relativa al sistema SRC. Consideriamo ora una linea a doppio binario: in questo caso un binario è interessato da una sola direzione di marcia, per cui una linea trova limitazione solo nelle possibilità tecniche offerte dal SRC.; si tratta dunque di individuare la distanza minima che deve intercorrere tra la coda del treno che precede e la testa del treno che segue.
Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 4 -
3.3 Circolazione con densità [δ] controllata
La traiettoria è suddivisa in "sezioni di distanziamento" e la regola è che nessun veicolo
può entrare in una sezione se quello che lo precede non è già uscito. Quindi la
circolazione si svolge con densità massima costante. 1
δ = --- D
ove D è la distanza fra i due successivi veicoli 3.4 Lunghezza della sezione di distanziamento Per ragioni di sicurezza il valore minimo tollerabile di D è dato dalle seguente espressione generale:
D =α (M + VRm + S
m)
nella quale:
α > 0 è un coefficiente che dipende dalle tecniche con le quali è realizzato il
distanziatore
( ) il termine fra parentesi è uno spazio; più precisamente:
• M è uno spazio di sicurezza il quale deve tener conto delle diversità
casuali dei valori dei successivi valori entro parentesi
• Rm è il ritardo complessivo con il quale ha inizio la manovra di procedura
necessaria per evitare l'urto col veicolo che precede (per es. frenatura, arre-
sto); Rm quindi è una somma di tempi perduti ed è una funzione della
velocità di marcia.
3.5 Densità controllata con distanziatore ideale
(a) il distanziatore ideale permette la trasmissione continua e senza ritardi di tutti i dati relativi alla legge di moto del veicolo che precede verso il veicolo che segue il quale in modo continuo e senza ritardi può adeguarvisi. (b) in tal caso per definizione: Rm = 0
quindi: d = α (M + Sm)

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 5 -
Con α = 0 si avrebbero i veicoli a contatto; con α(M + S
m) = cost si avrebbero i veicoli a distanza fissa.
Tali due casi si hanno nei sistemi detti continui, generalmente a funi (funivie, teleferiche, ecc.) o catene (scale mobili etc.). Si ha la curva di deflusso
H = V x δ con δ = 1/D = costante
3.6 densità controllata con distanziatore cibernetico (automazione)
(a) Questo distanziatore funziona come quello ideale, salvo il fatto che esistono dei ritardi; quindi dev'essere Rm > 0
Si avrà H = H(V) (b) Se α < 1 non vi è sicurezza rispetto alla instabilità del veicolo che precede
3.7 densità controllata con distanziatore cibernetico al limite della procedura (caso
reale dell’automazione dei sistemi di metropolitana e dei people mover) E' un distanziatore cibernetico con α = 1; quindi dà la sicurezza rispetto al veicolo che precede 3.8 densità controllata con distanziatore strumentale
(a) rispetto a quello ideale non solo ha i ritardi, la trasmissione è discontinua o discreta. (b) la H = H (V) è governata dal sistema di blocco automatico a circuito di binario (c) Questo distanziatore è usato in ferrovia e la trasmissione dei dati avviene tramite segnali in linea che devono essere rispettati dal conducente del treno, o tramite trasmissione automatica terra-treno.
3.9 Il distanziatore strumentale La condizione "nessun veicolo può entrare in una sezione di distanziamento se quello che lo precede non è già uscito" tende ad evitare la collisione con il veicolo precedente arrestatasi per un qualsiasi motivo e che quindi costituisce ostacolo.
La progressiva di inizio della sezione di distanziamento generale costituisce quindi la "porta di
entrata" della sezione stessa, da non superare se non si ha specifica trasmissione di via libera;
l'inizio di tale sezione può quindi essere considerato come il posizionamento di un potenziale
ostacolo improvviso. L'analisi dell'evento "ostacolo improvviso" è utile per introdurre le tipologie
e le caratteristiche dei segnali del distanziatore strumentale.

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 6 -
3.10 Percezione dell'ostacolo improvviso
a) il modo per percepirlo è la vista; b) tutto dipende quindi dallo spazio di visibilità reso disponibile dalla geometria della traiettoria. Tale spazio può essere ridotto:
o da ostacoli temporanei; o da nebbia; o da insufficiente illuminazione;
c) può essere aumentato: o con adeguata illuminazione; o con l'eliminazione di eventuali ostacoli fissi; o con l'impiego dei radar.
3.11 Procedure di emergenza Tali sono le manovre che il conducente deve fare per evitare l'ostacolo; esse consistono:
a) nella modifica della traiettoria (non riguarda le ferrovie); b) nella frenatura d'urgenza; c) in entrambe; d) tutte (essendo attuate bruscamente per l'urgenza) rischiano di compromettere la stabilità del veicolo anche quando riescono ad evitare l'urto contro l'ostacolo improvviso.
3.12 la frenatura d'urgenza In quel che segue, sia a titolo di esempio metodologico, sia in relazione alla sua importanza nei trasporti terrestri, ci si riferirà alla sola frenatura d'urgenza. 3.13 Limitazione della Vmax L'unico modo per proteggersi sicuramente dall'ostacolo improvviso in traiettoria è quello di ade-guare la velocità alla visibilità disponibile, tenuto conto delle possibilità di frenatura d'urgenza. 3.14 Lo spazio d'arresto nell'ipotesi di moto naturalmente decelerato Esso è dato dalla:
V2
Sa = V Σ t
p + ------ + s'
2 dV dt
nella quale V è la velocità del veicolo al momento della percezione dell'ostacolo improvviso: Σt
p è il valore dei tempi perduti. dV/dt è il valore prescelto della decelerazione, mentre s' è un
suppletivo spazio di sicurezza mediante il quale ci si vuol coprire dal rischio che per qualche veicolo si possano avere valori eccezionalmente sfavorevoli di Σt
p e/o di dV/dt.
Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 7 -
3.15 Spazio tra i veicoli in condizione di sicurezza [ λ]
V2 max
λ > Vmax
Σtp + ------- + s'
2 dV dt
3.16 Valori numerici che scaturiscono dal calcolo (a) in ferrovia, per treni ben frenati
con λ = 100 m. si ha : V
max = 29 Km/h
λ = 200 m. si ha : Vmax
≅ 60 km/h
(b) su strada: a 100 Km/h si ha λ = 158 m.
a 200 Km/h si ha λ = 420 m.
(c) I limiti di Vmax così determinati risultano inaccettabili nelle ordinarie condizioni di esercizio
e per garantire adeguati tempi di percorrenza. (d) non esiste quindi in nessun caso, con le usuali velocità, alcuna protezione sicura dall'ostacolo improvviso. 3.17 Notificazione dall'approssimarsi del veicolo all'area dell'ostacolo probabile
(a) con uno o più segnali ad unica informazione (b) con un segnale capace di trasmettere due informazioni: SI o NO; eventualmente preceduto da uno o più di quelli di cui in (b). (c) con due segnali come sopra indicati (d) con notificazione strumentale, eventualmente automatizzabile.
3.18 Segnali ad unica informazione
(a) Se per Sa si adotta il valore del n. 3.14 con V = Vmax il diagramma V = V(s)
durante il rallentamento di servizio per fermare (si tratta, infatti, d'una fase dell'orario di
marcia del veicolo debitamente segnalata e quindi normale, non di urgenza) ha l'origine

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 8 -
degli spazi in corrispondenza del luogo dal quale il conducente riceve lo stimolo che lo
porterà a frenare.
Se la Vmax è stata scelta non in relazione al n. 3.15, bensì alle effettive esigenze del
trasporto in generale si ha:
λ < Sa
(b) Si supponga ora di aver localizzato in un punto Z la zona dell'ostacolo
probabile; si riporti indietro - cioè in senso contrario al moto - lo spazio Sa>λ .
Da tale origine, ma questa volta nel senso del moto, si riporti la lunghezza di visibilità λ1
ove si installerà un segnale S1 ad unico aspetto, cioè capace di dare una sola notizia:
quella che "quando s'è vista di esso si dista di Sa dal probabile ostacolo" : si tratta cioè
d'una notizia di distanza espressa in funzione della Vmax. Il conducente quindi deve
frenare e regolarsi come se effettivamente l'ostacolo ci fosse (in altre parole il
conducente deve portarsi ad una velocità coerente con la marcia a vista). Solo
quando sarà giunto a distanza λ da Z vedrà se l'ostacolo c'è effettivamente oppure no:
se c'è null'altro deve fare se non lasciare che il veicolo contini a rallentare per poi fermarsi
(marcia a vista). Se non c'è può interrompere l'azione rallentatrice e riaccelerare per
tornare nuovamente alla velocità Vmax.
(c) A rigore oltre il segnale S1 non ne occorre alcun altro. Tuttavia, nel timore che
esso possa sfuggire all'attenzione del conducente, se ne possono installare altri successivi
S2, S3 segnalanti distanze da Z minori di quella segnalata da S1. Se il veicolo, in vista di
tali segnali (distanze di visibilità λ2 , λ3) transitasse con velocità superiori a quelle V2, V3
lette sul suddetto diagramma V = V(s) la protezione dall'ostacolo verrebbe affidata ad una
pronta frenatura d'urgenza.

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 9 -
3.19 Segnale a due informazioni preceduto da segnali ad unica informazione del tipo descritto al n. precedente
(a) Il segnale S a due informazioni è installato ad una distanza L dall'ostacolo probabile; Le due informazioni ch'esso può dare sono:
- SI, ossia via libera del veicolo sopravveniente (nel segnalamento colore si adopera universalmente il verde) il segnale dà tale informazione quanto certamente l'ostacolo non c'è; oppure: - NO, ossia va impedita per veicolo sopravveniente (nel segnalamento di colore si adopera il rosso); il segnale dà tale informazione quando certamente l'ostacolo c'è.
b) La determinazione della origine degli spazi e del diagramma V = V (s) è identica al
precedente punto 3.18. Analoga funzione hanno i segnali S1 S2 in tutto simili a quelli del
n.3.18.
senso di marcia
V
Vmax
λ
SA S1 Z Ostacolo
Rosso: diagramma di marcia nel caso in cui alla distanza di visibilità da Z effettivamente l’ostacolo ci
sia.
Rosso – Blu: diagramma di marcia nel caso in cui l’ostacolo non ci sia ed il conducente accelera per
tornare alla velocità di marcia Vmax

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 10 -
c) Confrontando questo segnalamento col precedente, si vede che la differenza sta nel
fatto che il conducente viene a sapere della effettiva esistenza o no dell'ostacolo, nel caso
precedente, alla distanza λ , ed ora, invece, alla distanza ( λs + L) la quale –
operando su L - può essere fatta grande (teoricamente) quanto si voglia. Ne consegue
che la velocità del veicolo al momento della decisione certa sarà nel primo caso V3 minore
di quella Vs del secondo caso: il veicolo subisce un rallentamento di minore entità.
Nel primo caso si ha l’ "ostacolo improvviso" propriamente detto ed i segnali sono ubicati
dove si ha maggiore probabilità che esso si verifichi (ad es. in prossimità di passaggio
livello, posti di incrocio, stazioni). Nel secondo caso l'ostacolo improvviso è assimilabile
all'inizio della sezione di distanziamento ed il segnale S è lo strumento che trasmette
l'informazione "sezione di distanziamento libera", cioè abbandonata dal veicolo che
precede.
3.20 Due segnali capaci ciascuno di dare due informazioni
a) Con i segnali fin qui considerati resta comunque il fatto che, dovunque esista in
traiettoria una località di ostacolo probabile, il veicolo deve rallentare finché il
conducente non avrà accertato se l'ostacolo in effetti c'è o no.
Se lungo una traiettoria si susseguono numerosi e ravvicinati punti siffatti il veicolo avanza
con una velocità variabile tra la massima e quelle imposte dai rallentamenti, anche se poi
gli ostacoli in effetti non ci sono.
Questa condizione di cose non è ritenuta soddisfacente nei trasporti veloci interessanti
traiettorie con numerose aree di manovra, specie se i veicoli hanno prestazioni ridotte nel
moto vario (persone in piedi; merci imperfettamente assicurabili).
b) La questione si risolve completamente installando un ulteriore segnale S e,
determinata come al solito l'origine degli spazi rispetto al segnale S ed il diagramma
V=V(s), a distanza λ1 dall'origine si installi un altro segnale SA in tutto identico a quello
S.
c) Fra tali due segnali tuttavia esiste un vincolo: il segnale SA ripete esattamente le
informazioni di S, ossia avvisa il conducente della posizione in cui si trova S.
Se l'ostacolo non c'è, S dice SI; SA avvisa che S dice SI; ossia SA dà il segnale di
AVVISO di SI.
Se l'ostacolo c'è, S dice NO ; SA avvisa che S dice NO; ossia SA dà il segnale di AVVISO
di NO.
Se dunque l'ostacolo c'è effettivamente il conducente lo viene a sapere quand'è in vista
del segnale SA ed ha disposizione lo spazio Sa per arrestare il veicolo senza oltrepassare
il segnale S.
Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 11 -
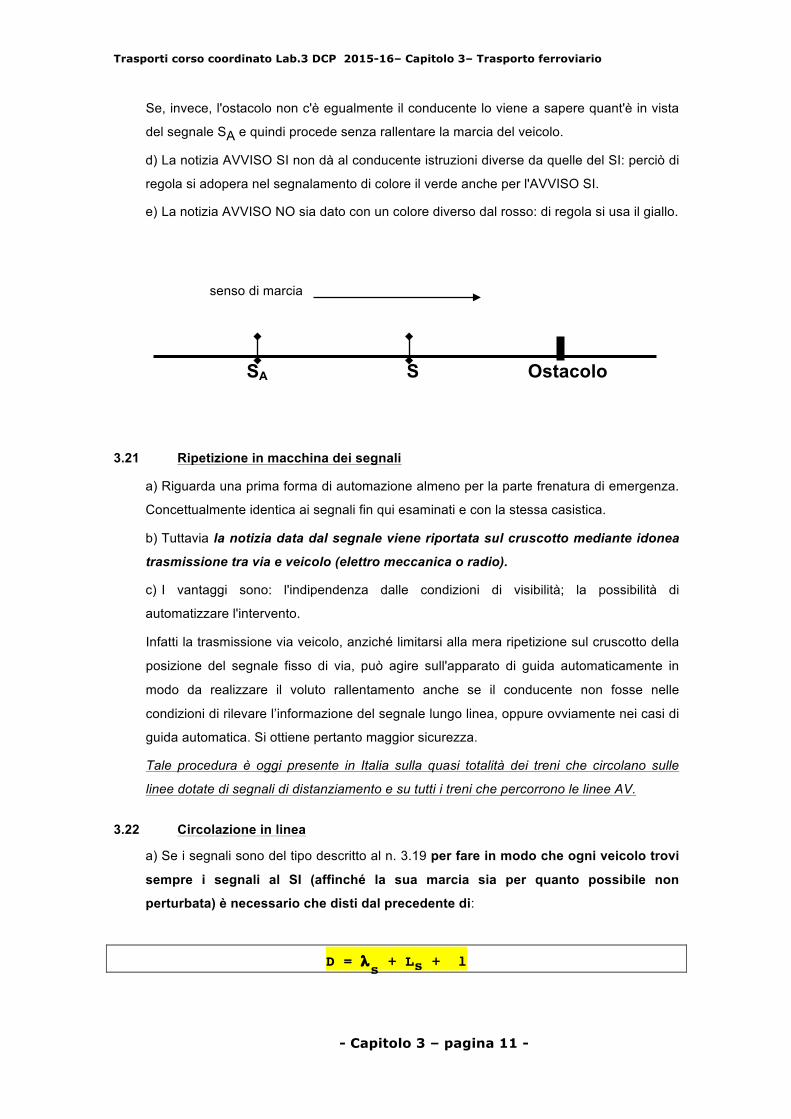
Se, invece, l'ostacolo non c'è egualmente il conducente lo viene a sapere quant'è in vista
del segnale SA e quindi procede senza rallentare la marcia del veicolo.
d) La notizia AVVISO SI non dà al conducente istruzioni diverse da quelle del SI: perciò di
regola si adopera nel segnalamento di colore il verde anche per l'AVVISO SI.
e) La notizia AVVISO NO sia dato con un colore diverso dal rosso: di regola si usa il giallo. senso di marcia
SA S Ostacolo
3.21 Ripetizione in macchina dei segnali
a) Riguarda una prima forma di automazione almeno per la parte frenatura di emergenza.
Concettualmente identica ai segnali fin qui esaminati e con la stessa casistica.
b) Tuttavia la notizia data dal segnale viene riportata sul cruscotto mediante idonea
trasmissione tra via e veicolo (elettro meccanica o radio).
c) I vantaggi sono: l'indipendenza dalle condizioni di visibilità; la possibilità di
automatizzare l'intervento.
Infatti la trasmissione via veicolo, anziché limitarsi alla mera ripetizione sul cruscotto della
posizione del segnale fisso di via, può agire sull'apparato di guida automaticamente in
modo da realizzare il voluto rallentamento anche se il conducente non fosse nelle
condizioni di rilevare l’informazione del segnale lungo linea, oppure ovviamente nei casi di
guida automatica. Si ottiene pertanto maggior sicurezza.
Tale procedura è oggi presente in Italia sulla quasi totalità dei treni che circolano sulle
linee dotate di segnali di distanziamento e su tutti i treni che percorrono le linee AV. 3.22 Circolazione in linea
a) Se i segnali sono del tipo descritto al n. 3.19 per fare in modo che ogni veicolo trovi
sempre i segnali al SI (affinché la sua marcia sia per quanto possibile non
perturbata) è necessario che disti dal precedente di:
D = λs + Ls + l

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 12 -
ove λs è la visibilità del segnale generico S; Ls è la lunghezza della sezione di
distanziamento ed l è la lunghezza del veicolo.
b) Se i segnali sono del tipo descritti al n. 3.20 la distanza D è:
D = Sa + Ls + l
c) Di conseguenza si ottiene:
- la possibilità di automatizzare il controllo di entrata ed uscita dei veicoli dalle
sezioni di distanziamento
- la possibilità di sostituire al segnale una telecomunicazione
d) ovviamente - come in 3.21 - vi è anche la possibilità di passare alla marcia con
ripetizione in macchina del segnale e si può pensare sia ad un semplice passaggio al
cruscotto dei segnali fissi di linea: sia - con progresso tecnologico e quindi con migliore
utilizzazione delle infrastrutture - di passare direttamente al cruscotto del veicolo che
segue la distanza che lo separa da quello che precede (blocco mobile ovvero il sistema
ERTMS omologato in Europa per la circolazione dei treni ad alta velocità e già operativo
su tutte le linee AV in Italia).
3.23 La marcia strumentale
Ma l'elemento "distanza" è soltanto uno - ed il più grossolano - dei parametri esprimenti le leggi
di moto dei veicoli che si susseguono lungo una linea; la strumentazione e l'automatismo pos-
sono essere spinti ulteriormente per trasmettere, anche con possibilità di intervento sulla guida
automatica (in atto su molte linee metropolitane nel mondo ed in Italia a Milano, Torino, Brescia
e Roma).
3.24 Applicazione del sistema del blocco automatico a sezioni di distanziamento
fisse (ancora tra i più diffusi)
Nelle linee ferroviarie ad alta potenzialità il SRC più diffuso in Italia è quello del Blocco Automa-
tico. Per capire il suo funzionamento ripensiamo al caso (della linea a semplice binario) in cui la
sezione di blocco era rappresentata dalla distanza tra due stazioni successive.
Stazione 2 Stazione 1
Dispositivi

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 13 -
Per aumentare la capacità si può pensare di usare un dispositivo (per esempio disposto a metà
strada tra le due stazioni) che avvisi la stazione di partenza che il treno precedente l'ha
superato e che quindi il tratto tra la stazione 1 e il dispositivo è sgombro. Ciò può essere fatto
manualmente con del personale lungo la linea oppure con dei segnali e dei dispositivi
automatici. Ovviamente questi dispositivi possono essere più di uno, infittendo il numero delle
sezioni di blocco, fino a che ciascuno degli intervalli in spazio tra i dispositivi non risulti pari a
da (V)+L.
S.1.C = segnale di prima categoria = invalicabile se posto a via impedita (Rosso) S.A. = segnale di avviso = informa dell’informazione riportata dal segnale S.1.C. (se è ad avviso NO il treno deve rallentare per potersi fermare prima del segnale S.1.C)
In figura è posto un segnale di avviso S.A. seguito da un segnale di prima categoria S.1C.: un treno che arrivi in D a velocità V deve essere informato circa la condotta di marcia da seguire nella tratta che sta per impegnare e cioè, a seconda della informazione che trasmette il S.A., il conducente sa se può impegnare la sezione di blocco AB o meno. Chiaramente, se l'informazione dice che il treno non può impegnare la sezione di blocco AB, è necessario che il veicolo si fermi in corrispondenza dell'inizio della sezione di blocco stessa, in quanto l'informazione nulla dice sulla posizione del treno che precede, nella sezione di blocco, il treno (od ostacolo) che potrebbe essere subito dopo A o subito prima B, cioè entrando o uscendo dalla sezione di blocco.
In base a ciò appare evidente che la distanza minima tra i due segnali S.A. e S.1C. è pari alla distanza di arresto da, e che non appena il treno riceve l'informazione di non poter impegnare la sezione di blocco deve iniziare la manovra di arresto in modo da fermarsi in A.
Dallo schema visto si può dedurre che la distanza AB può anch'essa essere ricondotta al minimo della distanza di arresto, facendo coincidere il S.A. successivo con il S.1C. precedente:
Stazione 2 Stazione 1
S.A./ S.1C S.1.CS.A./S.
S.A./S.1.C S.A./S.1.C
A B
da da
C
A
Stazione 2 Stazione 1
S.1C S.A. S.1.C S.A.
A B
da da
D
V

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 14 -
In questo caso la distanza minima di due treni che marciano alla velocità v è: 2 d(v) =
2da.
Immaginiamo infatti due treni marcianti entrambi alla velocità di regime v, uguale per tutti i
convogli. Affinché la marcia del treno che segue avvenga con regolarità alla velocità v, esso
deve trovare il S.A. disposto al verde (avviso SI) il che significa che anche il successivo segnale
di 1C. è disposto al verde (S.1C. = SI). Affinché questo accada la sezione di blocco deve essere
libera, e quindi tra la coda del treno che precede e la testa di quello che segue ci debbono es-
sere due distanze di blocco.
Poiché occorre tener conto anche dei franchi di sicurezza, della distanza di visibilità dei segnali
e dei tempi di reazione il coefficiente a in ferrovia con un S.R.C. del tipo del blocco automatico è
un po' maggiore di due.
La distanza minima alla quale possono venire a trovarsi i treni è 2 da quando la velocità è quella
di regime v, ma a prescindere dalla velocità, essa può anche essere zero, cioè i treni possono
arrivare a toccarsi (ovviamente quando sono fermi o in particolari condizioni, di un treno in
partenza ed uno in frenata etc.).
Poiché i segnali di cui abbiamo parlato finora sono fissi una volta posizionati, la distanza
tra di essi dipende dalla velocità di progetto della linea, da cui dipende la distanza di
arresto dei veicoli 3.25 Esaminiamo ora in che modo si modifica la teoria del deflusso per un sistema a
densità controllata di tipo ferroviario
In questo caso abbiamo un legame velocità- distanza sicuramente diverso da quello valido per
un sistema a densità libera: infatti se qui immettiamo sulla linea un gruppo di treni che viaggiano
ad una velocità più bassa di quella di progetto della linea (v1 < v), la distanza minima tra i treni
è ancora 2d, ma non d(v1) bensì d(v) in quanto il SRC è stato calibrato su v, cioè la distanza fra
i segnali è d(v).
Questo significa che se immettiamo sulla linea treni più lenti non varia il distanziamento
e quindi la densità ma diminuisce la capacità di linea.
Infatti con il sistema del blocco automatico non siamo in grado di realizzare un legame tra
velocità e distanza dei treni [v=v(d)] e questo perché con questo sistema conosciamo solo la
generica posizione del treno su un tronco di linea, ma non sappiamo se il treno che precede è
fermo, se viaggia alla velocità di regime v della linea o se procede ad una velocità qualunque
intermedia.
Quindi per poter scrivere una relazione del tipo v=v(d) dovremmo ricorrere ad un sistema di
regolazione e controllo che abbia la possibilità di modificare le distanze di blocco e di conoscere
con esattezza le distanze reciproche fra i treni. Se si dispone in effetti di un dispositivo che dica,

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 15 -
istante per istante, la posizione del veicolo che precede e la sua velocità [tipo ERTMS già citato]
siamo in grado di realizzare la condizione detta, quale che sia v (blocco mobile). In
quest'ultimo caso si avrebbe una curva di deflusso analoga a quella dei sistemi a densità libera.
Nel caso del SRC del blocco automatico la curva di deflusso si riduce ad una retta (vedi
figura seguente) in quanto come abbiamo detto è ancora valida la relazione Q = δV ma in
questo caso δ non è più funzione della velocità generica dei veicoli, ma è un valore costante
una volta fissata la velocità di progetto e quindi il distanziamento tra i segnali. Nel caso che tutti
i veicoli si muovessero alla velocità v di progetto avremmo un solo punto della curva (Q-v) per
velocità inferiori, la densità non può che rimanere costante e quindi diminuisce il flusso Q
smaltibile dalla linea linearmente con v.
P Flusso massimo (Potenzialità) P1 P2 Velocità di progetto del sistema
Q
V
Se la velocità dei convogli è minore di quella di progetto, per un dato sistema di regolazione e controllo (realizzato), diminuisce anche il flusso che la linea è in grado di smaltire. Pertanto la scelta della velocità di progetto è strategica. Se questa dovesse risultare molto superiore delle velocità reali di percorrenza, la potenzialità della linea risulterebbe alla fine molto bassa
Vp
V1 < Vp
V2 < Vp
RETTA PER L’ORIGINE: infatti la relazione H=V/d con d = cost è quella di una retta che passa per l’origine del tipo: y = ax

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 16 -
APPENDICE SUI CIRCUITI DI BINARIO Sistemi per l'accertamento della presenza di un treno NEL SRC tipo blocco automatico Si è visto, al precedente punto, che una delle fasi più importanti per consentire la circolazione di un treno in un tratto di binario, sia in piena linea sia in stazione, è quello del preventivo accertamento dello stato di libertà della via. Tale accertamento è possibile, come si è detto, controllando l'uscita dei treni dalla tratta in esame mediante intese tra i Dirigenti delle due stazioni estreme ovvero con accertamento diretto se la tratta è compresa nella propria stazione. Dovendosi realizzare un impianto automatico uno dei primi problemi da risolvere è quello di disporre di un sistema che consenta di avere automaticamente una indicazione della presenza o meno di un treno, e più genericamente di un asse, nella tratta considerata. Il dispositivo più adatto per questo scopo è il circuito di binario che, nella più semplice realizzazione, è costituito da un circuito elettrico a corrente continua che, alimentato da un estremo a mezzo di una pila o di un accumulatore P, alimenta all'altro estremo un relè B che viene detto relè di binario. Una parte del circuito è costituita dalle due rotaie della tratta da controllare, in modo tale che ognuna delle due rotaie porti una polarità. Lo schema è quindi quello rappresentato dalla figura seguente.
G G’ Il tratto di binario da controllare è quello compreso tra i punti G e G' dove sono montati dei giunti isolanti e cioè due giunzioni di rotaia che, pur garantendo la tenuta meccanica, interrompono la continuità elettrica tra le due rotaie contigue. E' facile rendersi conto di come se sul binario tra G e G', non vi è alcun asse, l'alimentazione della pila P può raggiungere il relè di binario B e mantenere il relè stesso alimentato e quindi eccitato . Se invece tra G e G' vi è un asse, questo cortocircuita l'alimentazione ed impedisce che una corrente raggiunga il relè B: questo rimane disalimentato e quindi diseccitato. Ritornando al circuito di binario indicato nella figura , risulta chiaro, in base a quanto abbiamo detto, che la posizione di diseccitato e di eccitato del relè di binario B denuncia se sul circuito insiste o meno un asse. Il relè B e la sorgente P si trovano in un posto di movimento e sono collegati, a mezzo di cavi elettrici, agli estremi del tratto di binario controllato. Il relè B ha poi suoi contatti inseriti in circuiti elettrici che possono dare una indicazione ottica dello stato di libertà del binario così come possono essere inseriti in circuiti che controllano la possibilità di disporre a via libera i segnali. La lunghezza di un circuito di binario non può essere illimitata in quanto le due rotaie non sono mai perfettamente isolate tra di loro: la dispersione tra l'una oppure l'altra farebbe si, con circuiti più lunghi di un paio di chilometri, che la corrente in arrivo al relè B non sarebbe, anche a circuito libero, sufficiente ad eccitarlo. Si possono però realizzare circuiti lunghi collegando tra di loro più circuiti successivi e cioè inserendo un contatto del relè B del primo nell'alimentazione del secondo e così di seguito. Si costituiscono quindi dei successivi posti ripetitori in cui si sfrutta la proprietà del relè di sostituire una debole alimentazione in arrivo con una nuova alimentazione locale.
Alimentazione corrente
elettrica [P]
Relè di binario
rotaia
rotaia
(+)
(-)

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 17 -
Sulle linee elettrificate in corrente continua non possono adoperarsi circuiti di binario alimentati corrente continua. Può infatti sempre temersi che si creino ai capi del relè B, per effetto delle cadute di potenziale conseguente alle correnti di trazione, delle tensioni sufficienti ad eccitare il relè stesso anche quando il circuito di binario è occupato. Si usano pertanto dei circuiti di binario alimentati in corrente alternata. In essi l'alimentazione e la ricezione avvengono attraverso due piccoli trasformatori, impiantati in campagna e cioè in opportune cassettine montate vicino al binario, uno di alimentazione TA ed uno di ricezione TR.
Notiamo inoltre che un circuito di binario assolve anche ad un'altra funzione che potremmo definire indiretta ma che non è per questo meno importante: con lo stato di eccitazione del suo relè, infatti, esso dà non solo la garanzia della non occupazione del tratto di binario ma anche quella della continuità, e quindi integrità, delle due rotaie del binario stesso. E' questo il motivo per cui i Regolamenti di esercizio prescrivono che notandosi una indicazione di binario occupato per un binario su cui non dovrebbero trovarsi veicoli occorre, con una visita sul posto, non solo assicurarsi che il binario sia libero ma anche che esso sia integro ed in particolare che non vi siano rotture nelle sue rotaie. Accenniamo infine alla necessità che può presentarsi, lungo la linea, disporre di brevi circuiti di binario allo scopo, ad esempio, di comandare le barriere di un passaggio a livello automatico. Si segnala infine come un circuito di binario, di qualsiasi tipo, accerta la presenza di un treno con un'azione negativa e cioè con la disalimentazione di un relè. Un qualsiasi guasto, essenzialmente ipotizzabile sotto forma di mancanza della sorgente di alimentazione o di interruzione di un qualsiasi punto del circuito provoca la stessa azione provocata dalla presenza di un treno e ciò è senz'altro a vantaggio della sicurezza quando il circuito di binario viene utilizzato per creare una situazione limitativa della circolazione quale una occupazione di un segnale od il bloccamento di una tratta della via. Il circuito di binario, invece, mal si presta, di per se stesso, per provocare una situazione di liberazione per il proseguimento della circolazione in un tratto di linea. Sarebbe ad esempio, per i motivi sopra indicati, del tutto contrario ai criteri base di sicurezza affidare alla diseccitazione del relè di un circuito di binario, posto all'uscita di una tratta non altrimenti controllata, la funzione di benestare per avviare un secondo treno nella tratta stessa supponendola libera dal treno precedente solo in quanto questo avrebbe provocato la diseccitazione del relè del circuito di binario di uscita. D'altra parte anche per operazioni di occupazione o di sbloccamento un circuito di binario può essere considerato sicuro solo a patto che si usi, per esso, un relè che non presenti pericolo di rimanere, per incaglio od altro, indebitamente nella posizione di eccitato anche quando viene tolta l'alimentazione al suo avvolgimento. La condizione di eccitato o diseccitato di un circuito di binario è, tra l'altro, una condizione primaria che non può essere controllata con controllo di ciclo. La realizzazione di una ridondanza chiederebbe l'oneroso impiego di due relè che si controllino l'uno con l'altro. Può utilizzarsi a tale scopo il sistema dell'alimentazione codificata dei circuiti di binario e del controllo del battimento del relè del circuito stesso (l’alimentatore determina una corrente alternata con un codice di alternanza predefinito ed il relé è in grado di reagire – eccitarsi – solo se riceve quel dato codice e pertanto “batte” (ovvero si eccita e si diseccita) allo stesso ritmo dell’alimentatore).

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 18 -
3.26 Cenni sugli aspetti di progettazione
A) Progetto della potenzialità e del segnalamento Come si è esposto nei diversi paragrafi precedenti le caratteristiche del sistema di regolazione e controllo della circolazione (segnalamento) condizionano direttamente la potenzialità di circolazione della linea in quanto dalla relazione generale del deflusso H = V / d(V) discende che la potenzialità H dipende inversamente dal distanziamento tra i veicoli e quest'ultimo dipende direttamente dal sistema di segnalamento e dalla velocità critica di sua impostazione. Ad esclusione dei sistemi automatici, i sistemi strumentali di tipo tradizionale, tra cui quindi anche il cosiddetto Blocco Automatico tipo FS, una volta realizzati su una certa velocità massima di impostazione dei convogli (velocità critica) impongono un distanziamento non più modificabile, anche se nella realtà tutti od alcuni di essi marciano a velocità più basse. Tale situazione determina infatti un abbassamento della potenzialità di linea, non potendo crescere la densità di circolazione. In fase di progetto occorre dunque assumere alcune scelte che risultano fondamentali per tutta la vita economica degli interventi che si attueranno:
- la velocità critica, - il sistema di segnalamento,
- la potenzialità desiderata. Evidentemente le prestazioni della linea, in termini plano-altimetrici, e del materiale rotabile influenzano anch'essi la potenzialità di circolazione, intervenendo sulle fasi di moto vario (accelerazioni), sulla capacità dei convogli, sulle velocità possibili. Comunque questi aspetti risultano in definitiva meno vincolanti e consentono solo aggiustamenti rispetto alle scelte di fondo sopra richiamate. Dato che la distanza media tra i convogli che circolano su di una linea è evidentemente funzione della distanza di sicurezza già definita e che questa in definitiva dipende dalla distanza di frenatura, funzione quadratica della velocità, all'aumentare delle velocità cri-tiche di progetto Vc diminuiscono le potenzialità raggiungibili. Ci si trova quindi di fronte ad una scelta tra due elementi contrastanti. Se si privilegia la velocità si deve rinunciare ad obiettivi di elevata potenzialità di trasporto e viceversa. Sono evidentemente possibili tutte le soluzioni intermedie, trovandosi nella classica situazione della ricerca di un ottimo vincolato, nella cui funzione obiettivo compaiono grandezze di segno opposto. Nella fase della ricerca della soluzione sarà dunque necessario che vengano definiti gli obiettivi di progetto, in termini di domanda di trasporto da servire e prestazioni da garantire. Merita ricordare che nella definizione della domanda di trasporto che potrà utilizzare il sistema in progetto si è dovuto far uso di un modello di ripartizione modale, che basandosi sulle prestazioni tempo - costo - affidabilità dei sistemi alternativi ha consentito di stimare le quote di domanda che utilizzeranno i diversi sistemi. Ne consegue che modificare le prestazioni di uno solo dei sistemi disponibili fa modificare la domanda che lo utilizzerà. Se quindi la domanda prevista non fosse compatibile con le velocità critiche necessarie, ridurre tali velocità comporta di conseguenza anche una riduzione della domanda potenziale, che andrà nuovamente stimata con il modello di ripartizione modale. Il pro-cesso è ovviamente iterativo e può prevedere anche la modifica delle prestazioni dei sistemi alternativi a quello in progetto se ad esempio fosse obiettivo irrinunciabile la quota di domanda che lo dovrà utilizzare.
Definite la velocità critica ed il sistema di segnalamento è conseguentemente definita la potenzialità di trasporto, nell'ipotesi, vera quasi esclusivamente nelle linee di tipo urbano - metropolitano, che tutti i convogli siano uguali e circolino tutti alla medesima velocità pari a Vc. Si danno due casi. Il primo già ampiamente citato è che i veicoli abbiano velocità più basse, ad esempio perché si è scelta una velocità critica maggiore per prevenire futuri sviluppi tecnologici del trasporto. In questo caso la potenzialità ottenibile sarà minore, secondo l'andamento lineare della curva di deflusso indicata al par. 3.25. Il secondo caso è relativo al fatto che raramente su

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 19 -
una linea ferroviaria tradizionale si hanno veicoli che circolano tutti alla stessa velocità (circolazione omotachica). Infatti in genere si hanno in circolazione veicoli diversi per prestazioni e finalità di trasporto: veicoli merci e passeggeri, passeggeri lenti e veloci (circolazione pluri-tachica). In questo caso, anche se una categoria di convogli marcia alla velocità critica le altre categorie marciano a velocità minori. La circolazione pluritachica è fortemente limitativa della potenzialità di circolazione come espone la figura seguente che mostra la riduzione di potenzialità conseguente all'inserimento di un treno di diversa categoria (più lento) in un pacchetto di treni veloci. L'esempio è generale per ogni possibile inserimento.
1
V=V1 V=V2 < V1
S1
S2
Tempo = t Dt Dt2
1 2
3 1
CIRCOLAZIONE PLURITACHICA OVVERO DI TRENI CON VELOCITA’ DIVERSA

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 20 -
Se i treni marciassero tutti alla velocità V=V1 (tracce in nero nella figura) si susseguirebbero tutti allo stesso intervallo temporale Dt; la presenza dei treni più lenti (V=V2) (tracce in rosso nella figura) impone un intervallo in tempo molto più lungo. Ne l caso in figura, ad esempio un “treno lento” annulla la possibilità di inoltro di 4 treni veloci. Se i treni lenti si inserissero casualmente tra quelli veloci la potnialità della linea risulterebbe molto ridotta.
B) Progetto dell'esercizio e dimensionamento del parco Le questioni esposte al punto A mettono in evidenza come la progettazione dell'esercizio di un sistema a densità controllata è operazione delicata e complessa. Infatti nel definire le tipologie e le modalità di trasporto (servizi merci e passeggeri, passeggeri a breve, media e lunga distanza) si incide anche sulle prestazioni del sistema, in termini di potenzialità e prestazioni velocità - tempo di viaggio ed in conseguenza sulle stesse possibilità di soddisfare la domanda potenziale. Progettare l'esercizio in estrema sintesi significa definire:
- orari di servizio e frequenza; - numero e posizione delle fermate; - eventuali specializzazioni (di itinerario, fermata, velocità);
- tipo, prestazioni e dimensioni del parco veicoli. Il calcolo delle frequenze è abbastanza semplice, una volta nota la distribuzione della domanda lungo la linea di trasporto. Si supponga una linea tra A e B con cinque fermate intermedie:
1 2 3 4 5 A*-------|--------|---------|--------|--------|------*B 1000 2200 5000 3200 3000 1800
Siano noti i flussi per tratta in termini di passeggeri o quantità di merci nell'unità di tempo. Nell'esempio sopra riportato sino passeggeri per ora nei due sensi di marcia. La tratta più carica risulta essere la 2 - 3 con 5000 passeggeri. Il valore della frequenza necessaria risulta essere:
ove con Cp si è indicata la capacità di ciascun veicolo o convoglio di veicoli. Nel caso di un treno con 500 posti offerti f risulta pari a 10 treni/ora, 5 per senso di marcia (cioè con un periodo T pari a 12 minuti), qualora la domanda sia equamente ripartita nelle due direzioni, altrimenti il calcolo deve essere effettuato separatamente per ciascun senso. La semplice procedura esposta si applica al dimensionamento delle frequenze di qualsiasi servizio di trasporto (aereo, bus, tram, etc.). Nel caso ad esempio di una linea di bus, con capienza dei veicoli di 100 posti (servizio urbano), si ottiene con gli stessi valori indicati una frequenza di 50 autobus/ora, un autobus ogni 2.4 minuti per senso di marcia. E' evidente che per servire la domanda sulla tratta più carica occorre dimensionare il servizio in modo sovrabbondante per tutte le altre tratte e ciò può risultare particolarmente grave nel caso di domanda di punta molto accentuata. In tal modo infatti il rapporto tra i
5000 f = ----- Cp
Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 21 -
posti utilizzati su tutta la linea e quelli realmente offerti risulta molto basso. In pratica il nostro servizio produttivo di trasporto è costretto ad un surplus di produzione sull'intera linea per soddisfare tutta la domanda. Questo è usuale in campo urbano ove si manife-stano punte in una direzione privilegiata (verso il centro la mattina, dal centro la sera). Per servire la domanda nella direzione di punta, il servizio presenta coefficienti medi di occupazione molto bassi (rapporto tra passeggeri x Km e posti x Km). Il coefficiente di occupazione di un servizio è un indicatore molto importante della produzione in quanto consente di valutare quanto l'offerta riesce ad adeguarsi alle caratteristiche della domanda ed ancora è sinteticamente caratteristico del rapporto ricavi/costi del servizio offerto. Il coefficiente si misura mediante il parametro posti o passeggeri x Km, che sintetizza la dimensione dell'offerta e della domanda. Nei trasporti infatti la dimensione della produ-zione è misurabile solo integrando le quantità da trasportare con le distanze che tali quantità debbono coprire. Gli orari di servizio, il numero e la posizione delle fermate dipendono dalla dimensione e dalle caratteristiche della domanda che deve essere nota nelle sue forme caratteristiche di matrici origine - destinazione, nelle necessarie unità di tempo. Si fa notare che l'utente richiede particolari prestazioni ai servizi di trasporto, a volte anche in contrasto tra di loro. In primo luogo l'utente non gradisce i trasbordi e quindi richiederebbe linee lunghe tra origine e destinazione dal proprio spostamento. Ciò contrasta con quanto si è visto in relazione al coefficiente di occupazione del servizio offerto perché non consente all'esercente di adeguare l'offerta alle diverse dimensioni della domanda. Ciò contrasta anche con la rapidità dello spostamento, prestazione anch'essa essenziale per l'utente, in quanto per ridurre i trasbordi ed accrescere l'accessibilità al sistema l'esercente è costretto a realizzare linee tortuose. L'utente vor-rebbe ancora che le fermate fossero molto frequenti, per ridurre i propri percorsi a piedi o su altri mezzi, ma tale esigenza è sentita solo quando esso non ha avuto ancora accesso al sistema, infatti, dopo, lo stesso utente vorrebbe che non avvenissero altre soste fino alla sua destinazione. E' evidente che ciascun utente manifesta obiettivi diversi in relazione alle esigenze del proprio spostamento. Per quanto riguarda il dimensionamento del parco rotabile [NM], il calcolo può essere semplicemente effettuato in via grafica ed analitica. Il concetto di fondo è che occorre-ranno tanti veicoli (= convogli) quante partenze dovranno essere garantite nel tempo occorrente al primo veicolo a ritornare alla stazione/fermata di origine (in genere denominato Tempo sul giro = Tg, in minuti). Dato che il periodo T misura l'intervallo tra le partenze (un veicolo ogni n minuti) risulta: NM = (1/T) x Tg
e poiché T = 1/f NM = f x Tg
In via grafica, facendo riferimento alla figura in cui si è esaminato l'effetto della circolazione pluritachica, NM sarà misurato dal numero di partenze necessarie,
prima che il veicolo 1 sia nuovamente disponibile nella stazione S1 per una ulteriore
partenza per S2.
E' evidente che le esigenze di parco saranno sempre meno rilevanti quanto più elevate saranno le velocità commerciali medie (velocità relative al tempo necessario per l'intero spostamento, comprensive dei tempi di sosta). Ma le velocità commerciali risentono fortemente dei tempi necessari per effettuare la sosta nelle stazioni, da cui un certo interesse per i servizi rapidi-intercity, che però condizionano, come visto, la potenzialità di circolazione. Nel caso dei servizi di autobus è viceversa il traffico promiscuo ed il condizionamento della circolazione a ridurre fortemente le velocità commerciali, imponendo elevati costi sia per l'azienda sia per l'utente

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 22 -
3.26 Le Ferrovie Urbane, le Metropolitane, le Tramvie
A] Questi sistemi comprendono: (a) le ferrovie urbane (dette anche metropolitane), appositamente realizzate per svolgere tali funzioni; cui spesso si sovrappongono servizi suburbani o vicinali in relazione alla configurazione territoriale della conurbazione entro la quale esiste l'esigenza di tali viaggi pendolari. Quando prevalgono le esigenze suburbane si adottano più grandi distanze fra le fermate e treni più veloci (vedasi la metropolitana londinese). L'esempio contrario è quello parigino, la cui banlieu (suburbio) è servita con autobus o con treni delle ferrovie statali (SNCF). A New York esistono due reti metropolitane, una in funzione urbana ed una suburbana; (b) l'utilizzazione agli stessi fini di cui in (a) - ma più raramente nel settore propriamente urbano - di linee facenti parte della grande rete ferroviaria; appare evidente l'enorme difficoltà a dare soluzioni seriamente valide per questa via alle esigenze dei trasporti urbani e suburbani, specialmente se sono interessate linee importanti del grande traffico ferroviario. B] Scelta della quota d'una ferrovia urbana (a) Una tale ferrovia può essere sotterranea, oppure a raso o sopraelevata. (b) Taluni sostengono la economicità costruttiva della soluzione sopraelevata. Essa tuttavia presenta delle complicazioni per lo impianto delle stazioni. Se si tengono sopraelevate, il loro ingombro, specie per treni lunghi, può essere inaccettabile. Se si vogliono le stazioni a raso, si devono introdurre nella linea pendenze fortemente sfavorevoli per l'esercizio (salite in avviamento, discese in frenatura). Si pone, poi, per la linea sopraelevata la difficoltà dell'inserimento nell'ambiente, la rumorosità (verso l'esterno) dei treni, il disturbo alla intimità delle abitazioni. Alcuni di questi inconvenienti possono attenuarsi coi veicoli su ruote gommate. (c) La soluzione a raso conserva taluni degli inconvenienti di quella sopraelevata. Ne ha poi uno proprio: costituisce un vallo difficilmente valicabile, se non con sopra o sottopassaggi veicolari e pedonali; divide cioè il territorio nelle due sponde come un corso d'acqua. (d) Gli inconvenienti delle soluzioni (b), (c) fanno spesso preferire la soluzione sotterranea, per essendo la più costosa. (e) I casi in cui è accettabile la soluzione a raso. (f) Conseguente prevalenza della soluzione sotterranea. (g) Saldatura tra percorsi urbani e suburbani. C] Scelta della quota della sotterranea: la soluzione superficiale (a) Sono ovvii i vantaggi della soluzione superficiale (si intenda: la linea sotterranea collocata con l'estradosso delle gallerie il più vicino possibile alla superficie stradale) nei confronti degli scavi da effettuare; (b) così pure nei confronti della funzionalità delle stazioni; queste infatti, essendo poco profonde, sono facilmente raggiungibili con poche scale: la banchina dei treni sta poco al di sotto del marciapiede stradale; (c) sono ovvii gli svantaggi della linea superficiale nei confronti delle interferenze con i servizi sotterranei (acquedotti, fognature, gas, cablaggio di elettrodotti, delle telecomunicazioni, ecc.) che devono essere spostati per far posto alle gallerie ferroviarie; così pure le interferenze con le fondazioni dei fabbricati danno luogo a difficoltà, (d) nei confronti dell'andamento plano-altimetrico, la ferrovia è costretta a seguire quello delle sovrastanti strade, con conseguenti forti pendenze (fino allo 3.5%) e curve strette (fino ad R = 100 m); (e) nel corso dei lavori viene gravemente compromessa la circolazione di superficie e l'agibilità delle strade interessate.

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 23 -
D] La soluzione profonda (a) E' ovvia la complicazione maggiore nella esecuzione dello scavo profondo; (b) in particolare nello scavo delle stazioni, per la loro dimensione e profondità; (c) sono evidenti gli svantaggi delle stazioni che hanno bisogno di impianti di trasporto interno (scale mobili, ascensori, traslatori); (d) sono evidenti i vantaggi per quanto riguarda le interferenze con i servizi sotterranei e con le fondazioni di fabbricati; (e) nonché i vantaggi nei confronti dell'andamento plano-altimetrico; (f) situazione dubbia nei confronti della circolazione di superficie nel corso dei lavori, specie in rapporto alla distanza fra gli scavi per le stazioni. E] Sagoma limite (a) In generale queste linee sono indipendenti dal sistema delle grandi ferrovie; (b) è importante il contenimento della sagoma allo stretto indispensabile ai fini del contenimento degli scavi di linee e delle stazioni; (c) si può impostare una ricerca di ottimazione fra le opposte esigenze richieste dalla sagoma, dal gigantismo del veicolo singolo e del treno ai fini del raggiungimento della voluta produzione di trasporto (d) Tuttavia una tale ricerca avrebbe soltanto interesse teorico se la standardizzazione delle costruzioni dei veicoli non consentisse di derogarvi. (e) Alcuni dati pratici: - una capacità di 1 treno ogni 90", ossia di 40 treni/h è facilmente raggiungibile anche con distanziatori aventi con coefficiente di sicurezza m=1; - valori maggiori sono, sia pur con difficoltà, possibili; - capienza dei veicoli da 8 a 12 posti offerti per ml di treno sono valori pratici raggiungibili; - lunghezza delle banchine di stazione: da 100 a 120 a 150ml. Cosicché una produzione di 32.000 posti offerti/h per ogni senso di marcia è normale per una metropolitana; né è difficile salire fino a circa 100.000. Per confrontare gli ordini di grandezza, un'autolinea urbana con autobus da 100 posti regolata sulla frequenza di un passaggio ogni 3' produce 2000 posti offerti/h La metropolitana è certamente l'MSS capace della più elevata produzione possibile. F] La questione della linea di contatto (a) Il contenimento della sagoma limite si consegue con la 3^ rotaia; (b) d'altra parte il gran numero di motrici rende conveniente la bassa tensione cui la terza rotaia si adatta molto bene; difatti la maggior parte di metropolitane nel mondo è così elettrificata; (c) l'unico inconveniente che può sorgere si ha quando la metropolitana abbia lunghi percorsi a raso o si prolunghi su linee suburbane all'aperto, con Passaggi a.Livello, e quindi col pericolo di contatti accidentali.

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 24 -
G] Caratteristiche dei veicoli (a) Il peso/asse è generalmente intorno a 10 tonn; (b) Le vetture sono a carrelli; possono essere tutte automotrici od in parte rimorchiate, secondo le esigenze delle linee da servire; (c) si punta sulla massimizzazione dei posti offerti in relazione alla punta di domanda, con eventuale sacrificio dei posti a sedere; tenuto conto della brevità dei percorsi; (d) obiettivo fondamentale è la minimizzazione dei perditempo di fermata; quindi alti valori di accelerazione/decelerazione; brevi tempi di incarrozzamento (sosta minima 30”). Quindi gran numero di porte opportunamente distribuite e banchine alla quota del piano del pavimento.
(d) i treni: (d1) possono essere a composizione bloccata, non necessariamente con intercomunicazioni (d2) debbono essere bidirezionali, ossia composti di sole automotrici, oppure con rimorchiate del tipo pilota (ossia con posto di guida) (d3) le automotrici in composizione al treno devono essere a comando multiplo (ossia comandabili tutte dal banco di guida d'una qualunque di esse) (d4) le stesse possono prendere corrente dagli apparecchi di presa d'una solo di esse, che passa la corrente alle altre mediante un cavo di trazione che corre lungo tutto il treno; oppure ognuna può prendere corrente per conto suo. la prima soluzione è più costosa e sollecita di più linea di contatto dal punto di vista elettrico (ed anche la presa di corrente); la seconda sollecita di più la linea meccanicamente. H] Le stazioni (fermate) di piena linea Alla quota del piano del ferro sono possibili due soluzioni: (a) banchine laterali e generalmente due gallerie, (b) banchina unica centrale. Alla quota di accesso dei viaggiatori dalle vie vi è un ambiente diviso in due parti dalla linea di controlleria;
nella parte esterna i viaggiatori accedono liberamente dall'esterno; nella parte interna accedono previo controllo del titolo di viaggio.

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 25 -
I] Le stazioni capolinea Al capolinea i treni debbono invertire il senso del moto ed il personale deve godere d'una pausa di ritmo. Tutto ciò richiede tempo. (a) Se il primo treno a partire dev'essere quello arrivato per ultimo, ciò limita la capacità di linea (ed allora è inutile installare in linea distanziatori elaborati). Può allora essere sufficiente la soluzione con manovra di regresso. (b) se invece mentre il treno ultimo arrivato è in manovra od in sosta, ve ne sono altri pronti a partire, la soluzione più idonea - man mano che la frequenza degli arrivi e delle partenze aumenta- è quella ad anello. J] Deflusso con distanziatore a tre segnali al limite della procedura (con m=1) a] Le stazioni hanno un segnale di protezione o di ingresso S ed uno di partenza SP per
ciascun senso di marcia; tutti i segnali di linea sono del tipo a tre aspetti [SI / AVVISO S I/ NO] ed ognuno è avviso del successivo.
b] se si vuole che quando la testa del treno è in vista del segnale d'ingresso S (punto F)
questo sia al SI (questa condizione, poiché ogni treno deve fermare in stazione, non è indispensabile), la coda del treno precedente deve aver liberato la sezione di distanziamento (punto E);
c] se è sufficiente che in F il segnale S sia ad avviso di NO, l'intervallo si riduce ad FH (in questo caso si usa il colore Rosso Lampeggiante oppure la combinazione ROSSO/GIALLO entrambi accesi)
K] Le tramvie (a) L'armamento Nonostante l'impiego delle apposite rotaie Phoenix a gola, resta intrinsecamente la difficoltà del connubio fra il binario e la pavimentazione stradale. (b) Le prestazioni il gigantismo dei veicoli è limitato dalla sagoma di ingombro e dai modesti raggi di curva; il gigantismo del treno teoricamente avrebbe gli stessi limiti ferroviari; ma la circolazione sulle strade urbane limita la lunghezza dei treni a 20-24 m; se è prevalente l'uso del marcia-tram (banchina o cordolo di separazione tra sede tranviaria e sede stradale) si arriva fino a 60-80 metri, nei casi in cui la sede stradale lo consenta. La capienza va quindi da 180 a 650 posti. Le velocità della marcia a vista sono modeste; tuttavia non minori di quelle degli autobus nelle strade ad altra densità.
STAZIONE
s SP F
E H

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 26 -
Tram di Venezia, Vmax = 70 km/h; velocità commerciale, che include i perditempi di traffico e quelli alle fermate, risulta mediamente di 20/25 km/h.
(c) Caratteristiche plano-altimetriche Raggio Minimo di curva = Rmin = 12/16 m ; Pendenza massima = imax = 4%.
(d) Difficoltà di viabilità Sono in relazione alle sezioni stradali ed alla possibilità di mettervi il marciatram; nelle aree di manovra, specie se si usano lunghi treni, conviene utilizzare sapientemente, per il transito dei tram, le stesse isole spartitraffico L] Soluzioni intermedie fra tramvie e
metropolitane Alcune città europee ed americane, preoccupate dalle crescenti difficoltà della circolazione stradale e quindi dei tram di grande capienza di cui dispongono; preoccupate anche dalle difficoltà tecniche, dal costo di gestione e dal disagio per gli utenti che una massiccia sostituzione di tramvie "pesanti" con autobus avrebbe comportato; preoccupate pure dell'elevato costo di costruzione delle ferrovie metropolitane, hanno ritenuto adottare la soluzione intermedia seguente: costruire l'infrastruttura sotterranea per la futura metropolitana e farvi passare per ora i tram esistenti. Il vantaggio è una grande rapidità di intervento con oneri di investimento ridotti e divisibili. Ciò dipende dal fatto che, dovendovi circolare per ora i consueti normali tram non è necessario costruire subito una o più intere linee. si possono costruire dei tronchi parziali brevi ai quali, per ora, i tram accedono mediante rampe. Quindi - pur costruendo la sotterranea in modo da potervi in futuro immettere i treni della metropolitana - si gradua l'investimento graduando l'estesa della costruzione. Inoltre la rilevante spesa dei veicoli ferroviari è rinviata al momento della graduale radiazione delle vetture tranviarie.

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 27 -
M] Guida vincolata con veicoli su pneumatici Motivazione ed esperienze fatte (a) E' evidente come appaia suggestivo l'impiego del pneumatico - che è generalmente per i veicoli a trazione meccanica a guida libera - anche per quelli del tipo a strada guidata. Se ne attendono tutti i benefici dipendenti dall'essere il peso del veicolo di fatto completamente sospeso, in quanto i pneumatici si comportano come lo stadio primario d'una sospensione multipla, i cui stadi successivi siano costituiti dalla sospensione elastica vera e propria. Ne consegue un notevole miglioramento del comfort di marcia e della silenziosità. Infine, vantaggio tutt'altro che trascurabile, la riduzione delle sollecitazioni dinamiche a fatica consente l'alleggerimento delle strutture resistenti dei veicoli e, in definitiva, la diminuzione della tara (peso proprio del veicolo) e quindi dei costi di costruzione e d'esercizio. Taluni hanno ritenuto di poter attribuire all'impiego del pneumatico anche alcuni vantaggi conseguenti al miglioramento dell'aderenza al contatto tra la ruota pneumatica con qualsiasi tipo di strada. Riconosciuto senz'altro che tali condizioni di aderenza risultano nettamente superiori a quelle possibili al contatto ruota-rotaia d'acciaio, va detto che, se esse vogliono essere utilizzate allo scopo di superare rampe più acclivi di quelle altrimenti possibili, si concorda su tale punto di vista; per effetto di tale beneficio, è possibile, con maggiore semplicità, e quindi economicità costruttiva, adattare alle difficoltà dei terreni da attraversare il profilo di strade sulle quali circolino veicoli muniti di ruote pneumatiche. Tale vantaggio però può essere utilizzato soltanto in occasione di costruzione di nuovi impianti. Lo stesso se si pensa di utilizzare tale migliore aderenza per ridurre il peso aderente ed in conseguenza il numero degli equipaggiamenti di trazione. Diverso è il caso se, invece, si pensasse di utilizzare le migliori condizioni di aderenza per applicare al contatto strada-ruota sforzi tangenziali più elevati (atti quindi a conseguire più elevate accelerazioni o decelerazioni) al fine di aumentare la velocità commerciale. Tale beneficio sarebbe però possibile solo veicoli che trasportassero passeggeri sempre seduti. Ma quando si trattasse di passeggeri anche in piedi (come avviene sempre nei trasporti pubblici collettivi) il citato vantaggio non potrebbe trarsi perché il limite superiore delle accelerazioni applicabili sarebbe imposto, non già dalle condizioni di aderenza, bensì dai limiti fisiologici per i passeggeri. La prospettiva dell'impiego dei pneumatici per evitare la rumorosità ha riacceso l'interesse per questo tipo di impianti. Allo scopo, inoltre, di assicurare all'infrastruttura sopraelevata il vantaggio del minor costo di costruzione, si è pensato di ricorrere ad un sistema di strada guidata più semplice, più leggero e più economico di quello del tradizionale binario. Si è giunti così alla soluzione detta "monorotaia". Esistono al riguardo due soluzioni che differiscono sostanzialmente fra di loro per il fatto che in una il veicolo è, come di consueto, appoggiato su carrelli di tipo particolare muniti di ruote pneumatiche di appoggio e del sistema atto a realizzare la guida vincolata; nell'altro, invece, il veicolo è sospeso a due carrelli aventi le medesime caratteristiche e funzioni. N] Le metropolitane leggere Metropolitane leggere si definiscono alcuni sistemi di trasporto collettivo urbano su rotaia, a trazione elettrica, di capacità elevata ma inferiore a quella delle metropolitane ed esercite su diversi tipi di sede, con possibilità di interferenze con la circolazione automobilistica e di attraversamenti di questa. Il termine viene applicato a sistemi diversi, alcuni dei quali sono frutto dello sviluppo di reti tranviarie, mentre altri sono stati progettati in modo completamente nuovo. L'aggettivo "leggero" può risultare giustificato dalle vetture, che circolano singole o in unità multiple fino a un massimo di quattro, e che in particolare hanno a pieno carico un peso medio per asse inferiore a quello delle vetture di metropolitana convenzionale.

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 28 -
Nei paesi di lingua inglese si parla di "Light Rail Transit" contrapposto all'Heavy Rail Transit", che include la metropolitana, o "Rapid Transit", e i treni per pendolari. "Light Rail" deriva probabilmente da "Light Railway", termine che descrive in Gran Bretagna le ferrovie costruite nell'ambito del "Light Railway Act". Questa legge, dall'inizio del secolo, ebbe l'obiettivo di promuovere la costruzione di ferrovie in aree che non potevano giustificare la spesa di una realizzazione ferroviaria secondo gli standard rigorosi dell'epoca. Venivano così permessi attraversamenti a raso senza la protezione di sbarre, esercizio senza un segnalamento completo, con regolamenti meno severi e possibilità di correre in sede stradale, dove venivano imposte restrizioni di velocità. Sotto questa legge furono costruite ferrovie, elettrificate e non, e anche alcune linee tranviarie di buon livello. In effetti il tram è un trasporto leggero su rotaie, ma con "Light Rail" si indica un modo di trasporto il più possibile indipendente da conflitti con la circolazione stradale, sia pure senza il ricorso sistematico allo sfalsamento di livello e alla sede in galleria, ed avente un elevato livello di servizio. Le linee tranviarie, che nel dopoguerra offrivano in molte medie e grandi città europee e nordamericane un servizio di trasporto collettivo di media capacità, correvano prevalentemente in sede mista o comunque non protetta. Si trovarono quindi, a causa dello sviluppo della motorizzazione individuale, nell'impossibilità di offrire un servizio regolare e veloce. Mentre nella maggior parte dei casi si ricorse alla sostituzione del tram con l'autobus, che pur non avendo la stessa capacità era preferibile per l'agilità e la flessibilità del suo impiego, in alcune città della Germania e dell’Olanda si cercò di ovviare al problema separando nettamente la sede riservata alla circolazione automobilistica da quella riservata alla circolazione del tram. Per realizzare questa separazione di sede era necessario, dove mancava lo spazio stradale per suddividerne l'uso fra mezzi collettivi e privati, ricorre a complessi e costosi interventi per la costruzione di gallerie e viadotti. A delle definizioni un po' più precise è arrivata la commissione nel 43° congresso U.I.T.P. di Helsinki nel 1979: "la metropolitana leggera è un modo di trasporto su rotaie che può essere sviluppato a tappe a partire dal tram moderno fino a circolare in galleria e in viadotti. Ogni fase dello sviluppo può costituire la fase finale, ma dovrebbe permettere anche di passare alla fase seguente". "Alcuni criteri specifici distinguono la metropolitana leggera dalla metropolitana propriamente detta. La via è in parte stradale: ne risultano dei problemi particolari per assicurare la protezione del resto del traffico veicolare e per l'esercizio". "Quanto alle prestazioni la M.L. si colloca fra l'autobus e la metropolitana. E' quindi indicata particolarmente per migliorare i trasporti pubblici nelle città di dimensioni medie". "Può sostituire un tram tradizionale, con un passaggio progressivo dall'uno all'altro. E' possibile il passaggio ulteriore alla metropolitana classica". "Può dare fluidità ai trasporti pubblici in città in cui operavano precedentemente solo autobus, il cui esercizio è sempre più difficile per l'aumento costante della circolazione individuale. Può rendere più invitante il trasporto pubblico. I costi di costruzione sono minori che per una metropolitana classica e quindi più accettabili da parte delle autorità competenti". "Essendo a trazione elettrica è più favorevole all'ambiente dell'autobus e più sicuro in caso di crisi data la sua fonte di energia". Successivamente sono stati definiti i principi fondamentali che devono presiedere alla costruzione di una metropolitana leggera. Questa deve essere costruita in funzione dei dati urbanistici e del contesto economico e ecologico; in ogni fase della costruzione di una rete i tre elementi: installazioni fisse, materiale rotabile e esercizio, devono essere coordinati e presentare uno sviluppo elevato, dando rilievo agli obiettivi di economia delle risorse e della protezione dell'ambiente. Le installazioni fisse devono essere concepite in maniera che una notevole separazione nelle sistemazione dei trasporti pubblici nei confronti del traffico individuale permetta di assicurare un esercizio sicuro, il meno perturbato possibile e di confort elevato. Ciò può essere realizzato con sede riservata e precedenza agli incroci semaforizzati. L'esercizio deve assicurare regolarità, puntualità e una velocità commerciale elevata. Devono essere predisposte, in punti adatti, installazioni di corrispondenza con gli altri mezzi di trasporto.

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 29 -
Le fermate devono avere accesso agevole e sicuro, disporre di mezzi di informazione dei viaggiatori e l'incarrozzamento deve essere rapido e agevole. L'esercizio può valersi di sistemi telematici e deve fornire frequenza e capacità adeguate alla domanda di trasporto . Ritornando alla nomenclatura, si ricorda che alcune volte si intende con L.R.T. il termine Light Rapid Transit. Sarebbe allora più corretto parlare di L.R.R.T., cioè di Light Rail Rapid Transit. Questo può essere considerato il grado più alto di L.R.T., con sede totalmente separata, a parte qualche attraversamento a livello protetto ed esercizio svolto da convogli leggeri. E' come una metropolitana convenzionale su scala ridotta, con velocità elevata. NOTE SULLE METROPOLITANE LEGGERE La caratteristica comune sulle capacità offerte è quella di fornire un trasporto collettivo di alta CAPACITA' (fino a 20.000p/h) ad una elevata VELOCITA' COMMERCIALE (quasi in tutti i sistemi si superano i 20Km/h e per alcuni si superano i 30Km/h). Le capacità attualmente offerte nelle ore di punta sono molto diverse da sistema a sistema, ma il campo di variabilità si restringe nell'ambito delle capacità teoriche che i sistemi sono in grado di raggiungere, sfruttando al meglio i distanziamenti minimi consentiti dal tipo di controllo della circolazione adottato e la possibilità di circolare in convogli di unità multiple fino al numero di 4. Quest'ultima possibilità per alcuni sistemi è già contemplata, per altri causerebbe problemi di insufficiente lunghezza di banchine nelle fermate e nelle stazioni. La frequenza massima dei convogli dipende dal tipo di controllo della circolazione. Con il sistema di blocco automatico si ottengono frequenze molto elevate, con intervalli anche inferiori ai 90" considerati come un limite nell'esercizio delle metropolitane classiche. Ci si avvicina così ai valori delle frequenze massime di una linea tranviaria con intervalli fra i passaggi inferiori al minuto raggiungibili dai tram, in condizioni di esercizio non perturbato e con marcia a vista a velocità bassa. La differenza fra l'esercizio tranviario e l'esercizio di una metropolitana leggera non è tanto nella capacità e nella frequenza di passaggio quanto nelle velocità e nella regolarità, che permette alle seconde il rigido rispetto dell’orario. Le caratteristiche geometriche dei tracciati prevedono: - Le pendenze massime sono molto elevate, anche superiori al 5%. Esse sono dovute alla
presenza di rampe corte e rimandano a caratteristiche meccaniche particolari dei motori delle vetture e alle considerazioni sul peso aderente di queste.
- La distanza media fra le stazioni presenta valori che oscillano, salvo rare eccezioni, fra i 400 e gli 800 metri. E' un dato che indica un'accessibilità maggiore rispetto alle metropolitane classiche, e inferiore rispetto ai tram, e si riflette nella velocità commerciale media.
- Un'altra considerazione sull’accessibilità può essere ricavata dalla presenza percentuale dei vari tipi di sede. La preponderanza dei tratti con sede a raso e la realizzazione della quasi totalità delle tratte di galleria come galleria superficiale determina una buona accessibilità.
- L'entità della presenza di gallerie sul totale del tracciato varia abbastanza fra i diversi sistemi, ma risulta in genere contenuta sotto il 20%. I tratti in sopraelevata sono spesso presenti ma raggiungono lunghezze considerevoli solo in alcune città europee e degli USA.

Trasporti corso coordinato Lab.3 DCP 2015-16– Capitolo 3– Trasporto ferroviario
- Capitolo 3 – pagina 30 -
Sempre a proposito delle gallerie va rilevato che sono concentrate sotto il centro della città, dove risultava più difficile l'inserimento a raso. In alcuni casi si è evitato il ricorso alla sede in galleria sotto il centro della città, optando per l'installazione a raso.
Talvolta si sono realizzate corsie per il mezzo di trasporto su rotaia in zona pedonale. Diversa è però l'organizzazione di tale infrastruttura quale è attuata a Calgary, con i binari lontani dai marciapiedi e divieto di attraversamento al di fuori degli incroci semaforizzati, e quale è attuata a Mannheim e Zurigo, dove i binari sono attraversabili senza restrizioni. L'intera rete di Zurigo, del resto, con l'alta percentuale di sede promiscua, malgrado il raffinato sistema di controllo sull'esercizio, appare ancora di tipo tranviario e la velocità commerciale non supera i 15Km/h. Per quanto riguarda la percentuale di sede riservata e protetta dalla circolazione individuale vi sono differenze fra i vari sistemi. Le più recenti realizzazioni (Calgary, Edmonton, San Diego, New Castle) hanno la totalità o la quasi totalità della sede indipendente dal resto della circolazione stradale; in questi sistemi si è sfruttata in parte una ferrovia esistente, usandone gli stessi binari (New Castle, San Diego) o semplicemente affiancandosi sul rilevato ferroviario. Nelle reti più vecchie si procede ancora nell'opera di riduzione dei tratti in sede promiscua. Le stazioni in alcune reti sono di tipo unificato, con una banchina lunga dimensionata per convogli fino a 3 o 4 unità. In altre reti distinguiamo le stazioni vere e proprie, fra le quali sono quelle in galleria, da altre fermate che offrono la lunghezza di banchina strettamente sufficiente per le dimensioni del convoglio attuale. Le norme raccomandano la larghezza minima della banchina di 2,50 metri e la presenza di pensiline. Non è stato possibile, nelle linee che fanno uso di tracciato stradale, protetto o no, alzare l'altezza della banchina fino al piano di calpestio, per cui l'esercizio è svolto in queste linee da vetture dotate di gradini ribaltabili. Infatti in galleria le banchine sono alte per facilitare l'incarrozzamento. Le stazioni sono spesso punti di corrispondenza con linee di autobus. E’ opportuno programmare le coincidenze a orario e provvedere opportuni sistemi di informazione all’utente in tempo reale. Le vetture hanno caratteristiche originali rispetto alle vetture di tram e di metropolitana: vetture articolate a 2 o a 3 casse e bidirezionali, di dimensioni diverse ma con valori più frequenti di lunghezza intorno ai 21 e ai 27 metri, sono adottate in Europa. Le porte sono numerose e banalizzate, larghe in genere più di 1,20 m per un incarrozzamento rapido. I sistemi di frenatura includono, come freno ausiliario, un freno magnetico a pattini. Il controllo sulla circolazione è affidato interamente al segnalamento nei sistemi nuovi. In altri sistemi il segnalamento è adottato solo su parte del tracciato e comunque sempre nella galleria, dove si raggiungono le frequenze più alte per l'esercizio di più linee sullo stesso binario. La marcia a vista su tratti in superficie consente il rispetto di un orario, sotto le indicazioni sul regime di marcia da tenere fornite da Un Centro di Controllo Centralizzato [C.T.C. Controllo Traffico Centralizzato] via radio, e grazie all'azionamento dei semafori a favore della metropolitana leggera.





























