Embed Size (px)
Citation preview
Cap.3 – Il progetto del timone
3 Il progetto del timone
3.1 Introduzione ..........................................................................66 3.2 La descrizione della pala ......................................................66 3.3 Lo studio della pala isolata ..................................................69 3.4 L’effetto della carena ............................................................71 3.5 L’effetto dell’elica .................................................................74 3.6 Le forze sulla pala .................................................................78 3.7 I coefficienti idrodinamici .....................................................80 3.8 I profili idrodinamici ............................................................84 3.9 L’analisi dei profili idrodinamici .........................................87 3.10 I profili per timoni navali ......................................................92 3.11 La superficie idrodinamica a sviluppo costante ...................97 3.12 Lo sviluppo planare ..............................................................99 3.13 La scelta dello sviluppo planare .........................................103 3.14 L’utilizzo dei coefficienti idrodinamici di profilo ...............104 3.15 La superficie idrodinamica articolata ................................108 3.16 Il progetto idrodinamico della pala ....................................115 3.17 La configurazione strutturale del timone ............................122 3.18 Il progetto strutturale ..........................................................128 3.19 Il modello per lo studio dell’asta ........................................129 3.20 Lo stato tensionale sull’asta ...............................................135 3.21 La procedura IACS per la verifica strutturale ....................136 3.22 Il dimensionamento strutturale della pala e dei supporti ...142 3.23 L’evoluzione del timone ......................................................147
APP. 1 Elenco dei simboli ...............................................................151
65
L’apparato di governo, manovra e stabilizzazione
3.1 – Introduzione
Nel presente capitolo si tratterà del progetto del timone facendo riferimento, in particolare, allo studio delle forze che maturano sulla pala di un timone tradizionale, ossia un timone verticale passivo posto a poppa della nave. In quanto segue perciò, ad una descrizione della geometria della pala seguirà un’analisi qualitativa del campo fluido in cui il timone si trova a lavorare, e successivamente si forniranno le basi per poter stilare il progetto, sia da un punto di vista idrodinamico, sia strutturale, analizzando la robustezza della pala e degli elementi di controllo e sostegno.
3.2 – La descrizione della pala
La forma della pala di un timone è frutto di una serie di considerazioni progettuali che sottostanno a valutazioni di origine sia idrodinamica sia strutturale. Benché diverse siano le possibili soluzioni del progetto, la superficie della pala assume un aspetto che ha delle caratteristiche ben precise: è quindi possibile definire i parametri geometrici che consentono di descrivere compiutamente la forma della generica pala.
Nel caso più semplice la pala è sostenuta da robuste strutture interne alla carena, ma talvolta è necessario provvedere a disporre appendici di carena che costituiscano un ulteriore sostegno: nel primo caso si ha una superficie di manovra completamente mobile, nel secondo caso si ha una parte mobile (la pala vera e propria) ed una parte fissa (il supporto, esterno allo scafo, lungo il bordo di ingresso della pala). Sia che si tratti di superfici all–movable, sia che si tratti di pale con supporti, il complesso esposto al flusso ha una forma tale da costituire un unico corpo idrodinamico, perciò la nomenclatura che viene qui introdotta si può considerare riferita indistintamente ai due casi, con l’accorgimento comunque di riconoscere quali parti siano mobili e quali fisse.
Va inoltre osservato che le definizioni che seguono possono applicarsi anche ad altre superfici idrodinamiche presenti sulla nave, si citano ad esempio le pinne stabilizzatrici utilizzate per lo smorzamento del moto di rollio .
Le dimensioni geometriche principali della pala sono definite con riferimento alla proiezione della pala sul piano identificato da due direttrici: la direzione dell’asse di rotazione e la direzione del flusso ideale generato dall’avanzo della nave. Su questo piano, in genere verticale e coincidente con il piano diametrale della nave, si identifica la forma del timone, ossia la forma della sua superficie idrodinamica proiettata. In particolare:
• l’area del timone AR [m2] (profile area) è l’area della superficie proiettata – il pedice R si riferisce al termine inglese per indicare il
66
Cap.3 – Il progetto del timone
timone (rudder) –, il suo profilo tracciato sul piano di proiezione viene scomposto in tratti come di seguito specificato;
• il bordo di ingresso (leading edge) e il bordo di uscita (trailing edge) sono i due tratti del profilo affacciati rispettivamente al flusso in ingresso ed a quello in uscita;
• il bordo alla radice (root, r) e il bordo all’apice (tip, t) sono i due spigoli della pala rispettivamente vicino allo scafo e all’estremità opposta. Trattandosi di superfici di controllo a sviluppo verticale, si parla usualmente di spigolo superiore e spigolo inferiore.
In base a queste definizioni, la generica lunghezza misurata (sempre sul piano di proiezione) nella direzione del flusso, ossia dallo spigolo di ingresso a quello di uscita, è detta corda (chord) – indicata con c [m] –, mentre quella misurata sullo stesso piano ma nella direzione ortogonale al flusso, dal bordo inferiore a quello superiore, è detta campata b [m] (span), quest’ultima è comunemente detta anche “altezza”.
Per quanto riguarda la terza dimensione, si definiscono gli spessori della pala. A tale scopo si fa riferimento al profilo idrodinamico che viene definito, sulla generica corda, da un sezionamento ortogonale al piano di proiezione e parallelo alla direzione del flusso ideale.
I valori di corda, campata e spessore possono essere valutati su diverse sezioni della pala, ma assumono particolare importanza quelli definiti nel modo seguente:
• la corda cr [m] e la corda ct [m] misurate rispettivamente alla radice e all’apice, eventualmente con riferimento alle linee orizzontali di compenso dell’area quando gli spigoli della pala sono inclinati, curvi o discontinui.
• la campata media bm [m] misurata come distanza fra la corda alla radice e quella all’apice, e la corda media cm [m] misurata a metà della campata bm; sulla base di questi parametri, quando la legge di variazione della corda è, come usualmente sulle navi, di tipo lineare, l’area del timone può essere espressa tramite il prodotto:
R m mA b c= [m2] (3.2.A)
• lo spessore tM [m] valutato come spessore massimo in corrispondenza della corda media.
Un’altra caratteristica significativa dal punto di vista idrodinamico è l’angolo di abbattimento medio Λ (sweepback angle), detto anche angolo di freccia, corrispondente all’angolo medio di inclinazione, misurato rispetto alla direzione della campata, della curva formata dai punti di ogni corda posti a 0,25 c dal bordo d’ingresso, ove con c si indica la lunghezza della
67

L’apparato di governo, manovra e stabilizzazione
generica corda. Si osservi che anche l’asse di rotazione può essere inclinato rispetto alla direzione della campata.
Sulla base delle grandezze fin qui definite si introducono alcuni rapporti adimensionali classici che, oltre a facilitare l’approccio allo studio delle caratteristiche idrodinamiche della pala per confronto fra diverse soluzioni, permettono di tenere sotto controllo le dimensioni principali entro campi di usuale impiego e sperimentata efficienza. Si sottolinea a riguardo l’importanza dei seguenti rapporti tra le dimensioni principali del timone:
• l’allungamento geometrico λG della pala (geometric aspect ratio), pari al rapporto tra bm e cm:
mG
m
bc
λ = [-] (3.2.B)
che assieme all’area della pala AR costituisce uno dei parametri fondamentali per il progetto preliminare del timone. La conoscenza della coppia (AT, λG) permette infatti di fissare i valori di bm e cm , infatti:
m Rb A Gλ=
Rm
G
Acλ
= [-] (3.2.C)
• il rapporto tra lo spessore tM e la corda mediana cm (thickness chord ratio), che usualmente viene mantenuto costante lungo la campata allo scopo di ottenere superfici a generatrici rettilinee.
• il rapporto di rastremazione, definito come il rapporto tra la lunghezza della corda all’apice e quella della corda alla radice (taper ratio).
• il grado di compenso, pari al rapporto tra l’area della pala a proravia dell’asse di rotazione (ARF [m2]) e l’area totale del timone.
RAPPORTI ADIMENSIONALI DEL TIMONE VALORI TIPICI
allungamento geometrico λG = bm / cm 1,5 ÷ 2,5
thickness chord ratio tM / cm 0,06 ÷ 0,25
rapporto di rastremazione ct / cr 0,5 ÷ 1,0
grado di compenso ARF / AR 0 ÷ 0.25
TABELLA 3.2.A Rapporti adimensionali tipici per timoni conven-zionali.
68
Cap.3 – Il progetto del timone
Le grandezze ed i rapporti sopra definiti trovano applicazione sia sulle pale simmetriche, aventi cioè simmetria rispetto al piano di proiezione, sia su quelle asimmetriche. In Tab.3.2.A si forniscono, a titolo di esempio, i valori indicativi dei rapporti adimensionali tipici di un timone verticale convenzionale, validi sia per piccole imbarcazioni, sia per navi mercantili e militari.
3.3 – Lo studio della pala isolata
Le forze idrodinamiche che maturano sulle superfici passive di controllo sono il frutto dell’interazione con il flusso d’acqua che le investe, ed il loro studio può essere condotto richiamando concetti generali, applicabili ad ogni corpo esposto al flusso di un fluido reale non omogeneo. Affinché tale approccio risulti utile ad illustrare la risposta della generica superficie idrodinamica, è però conveniente analizzare per prime le condizioni generali di funzionamento di un corpo isolato immerso in flusso omogeneo, e solo successivamente le particolarità legate al flusso non omogeneo nella volta di poppa.
In generale, un corpo immerso in un fluido e dotato di moto relativo rispetto ad esso sperimenta sulla sua superficie degli sforzi, sia normali sia tangenziali, che possono essere ridotti ad un sistema equivalente costituito da una forza risultante agente lungo una determinata retta d’azione. L’orientazione ed il valore di tale forza dipendono sia dalle caratteristiche del fluido e del corpo, sia dalla velocità relativa tra fluido e corpo, in ogni caso si definisce portanza L [N] (lift) la componente della forza totale nella direzione normale al flusso e resistenza D [N] (drag) la sua componente nella direzione e nel verso del flusso. Le forze scambiate dipendono in gran misura dalla direzione del flusso rispetto alla superficie, ossia dall’angolo formato tra la corda del profilo di detta superficie e la direzione del flusso (angolo di attacco).
Innanzitutto è necessario osservare che i due tipi di forza generati da un corpo in moto in un fluido non sono sempre presenti contemporaneamente: infatti, mentre la resistenza all’avanzamento è sempre presente, e può considerarsi come una forza di base, ed in genere parassita, la portanza, la cosiddetta componente nobile, non sempre si manifesta. Per generarla, almeno in modo efficace, si richiede una classe speciale di corpi disegnati e utilizzati in maniera opportuna. In realtà tale componente non può esistere senza la prima, e più che di forze di natura diversa è più opportuno pensare a un diverso equilibrio delle componenti. Per questi motivi, le superfici di controllo della nave sono dei corpi relativamente sottili e affusolati che hanno una forma alare ed un profilo ottimizzati proprio per generare un’elevata portanza tenendo sotto controllo l’insorgere della resistenza, da qui il nome di superfici idrodinamiche.
69
L’apparato di governo, manovra e stabilizzazione
La forza idrodinamica totale è il risultato di complessi fenomeni d’interazione fra il corpo ed il fluido, che possono essere messi in luce considerando le due diverse condizioni di flusso ideale (incompressibile non viscoso) e flusso reale (incompressibile e viscoso).
Procedendo secondo questo schema, si consideri inizialmente un corpo isolato immerso in un fluido non viscoso e sottoposto ad un flusso omogeneo e stazionario. Dal momento che non possono nascere forze viscose, non vi è attrito sulla superficie e gli sforzi che maturano sul corpo hanno sola componente normale a detta superficie. Per effetto dell’azione combinata della velocità V [m/s] e dell’angolo di attacco α [°] si induce una circolazione della velocità attorno alla pala determinando una depressione sulla superficie del corpo non esposta al flusso (dorso) e una pressione sulla superficie del corpo esposta al flusso (ventre):
• l’integrale degli sforzi di pressione nella direzione ortogonale al flusso rappresenta la forza di portanza L;
• l’integrale degli sforzi di pressione nella direzione parallela al flusso rappresenta la forza di resistenza D che, nel caso di fluido ideale, risulta nulla: questa situazione esprime proprio il noto paradosso di D’Alambert, per il quale un corpo sferico immerso in un flusso omogeneo ideale non subisce alcuna forza da parte del fluido.
In realtà, poiché il fluido è sempre viscoso, sulla superficie del corpo si generano sia sforzi tangenziali, sia di pressione. I primi sono all’origine di una resistenza d’attrito. I secondi, oltre ad essere all’origine della portanza, forniscono ora anche una risultante netta nella direzione del flusso, detta resistenza di pressione di origine viscosa, che consta di due contributi diversi:
• la resistenza di forma, o di scia, legata all’area della sezione trasversale del corpo, ossia al tipo di profilo, e causata dalla formazione di vortici nella zona poppiera del corpo (distacco dello strato limite). Tale situazione comporta infatti il mancato recupero delle pressioni al bordo di uscita della superficie idrodinamica.
• la resistenza indotta, quest’ultima ha origine dal fatto che la pala non ha allungamento infinito e quindi, per effetto della sua particolare fisionomia, mette in contatto alle estremità della campata le due zone (dorso e ventre) caratterizzate da pressioni diverse, comportando una minore differenza di pressione fra dorso e ventre e causando quindi una corrente indotta nella direzione della campata (il flusso da bidimensionale diventa perciò tridimensionale). Questa corrente indotta si combina con quella del flusso di base che lambisce la pala e determina la formazione di una scia vorticosa nella quale si disperde energia: a questa energia è associato l’aumento delle perdite.
70
Cap.3 – Il progetto del timone
La nascita della corrente indotta ha un effetto deleterio sulla portanza, infatti quest’ultima subisce una riduzione che si spiega proprio con la minore differenza di pressione che si viene ad avere per effetto del contatto fra i due campi del dorso e del ventre della pala.
L’effetto indotto dalla dimensione finita della campata non si manifesta in maniera evidente quando il flusso possiede alcune caratteristiche di omogeneità e il corpo immerso ha uno sviluppo costante con allungamento molto elevato. In queste condizioni si può ritenere che il flusso sia bidimensionale, ovvero che le forze idrodinamiche vengano scambiate tra fluido e profilo alare in un contesto in cui i vettori della velocità e della forza hanno caratteristiche invariate nella direzione perpendicolare al flusso e appartengono tutti a piani paralleli. Si vedrà più avanti che il modello di campo bidimensionale viene considerato valido, sebbene con opportune correzioni, anche in presenza di corrente indotta.
3.4 – L’effetto della carena
Le situazioni fin qui descritte fanno riferimento a flussi omogenei, mentre nella pratica le superfici di controllo sono poste in vicinanza alla carena e all’elica, entrambe fonti di forti modifiche del flusso.
Per quanto riguarda la presenza della carena, due sono i motivi della variazione del campo di velocità che viene ad incontrare il timone posto nella volta di poppa, infatti:
• la carena genera una scia che investe il timone determinando sulla pala un flusso a velocità inferiore rispetto a quella di avanzo della nave.
• la volta di poppa costituisce uno sbarramento all’innesco di un flusso indotto verso l’estremità superiore della pala e quindi limita le perdite legate alla formazione dei vortici alla radice.
Per effetto della presenza della carena a proravia del timone le forze sulla pala si modificano (in particolare la portanza si riduce) e per tenere conto di questo fenomeno si valuta la velocità media effettiva sul timone riducendo la velocità della nave della velocità di scia di carena.
È noto che, indicando con VA [m/s] la velocità di flusso vista dal disco dell’elica ad elica ferma (ossia la velocità di scia misurata rispetto alla nave), e con VS [m/s] la velocità assoluta di avanzo della nave, la velocità assoluta della scia vale allora (VS – VA). Il rapporto fra la velocità assoluta di scia e la velocità della nave si definisce frazione di scia e si indica con w [-]. La conoscenza della frazione di scia di una nave permette di valutare la velocità VA . Per navi bielica vale generalmente w < 0,2 mentre per navi monoelica vale 0,2 < w < 0,5.
71
L’apparato di governo, manovra e stabilizzazione
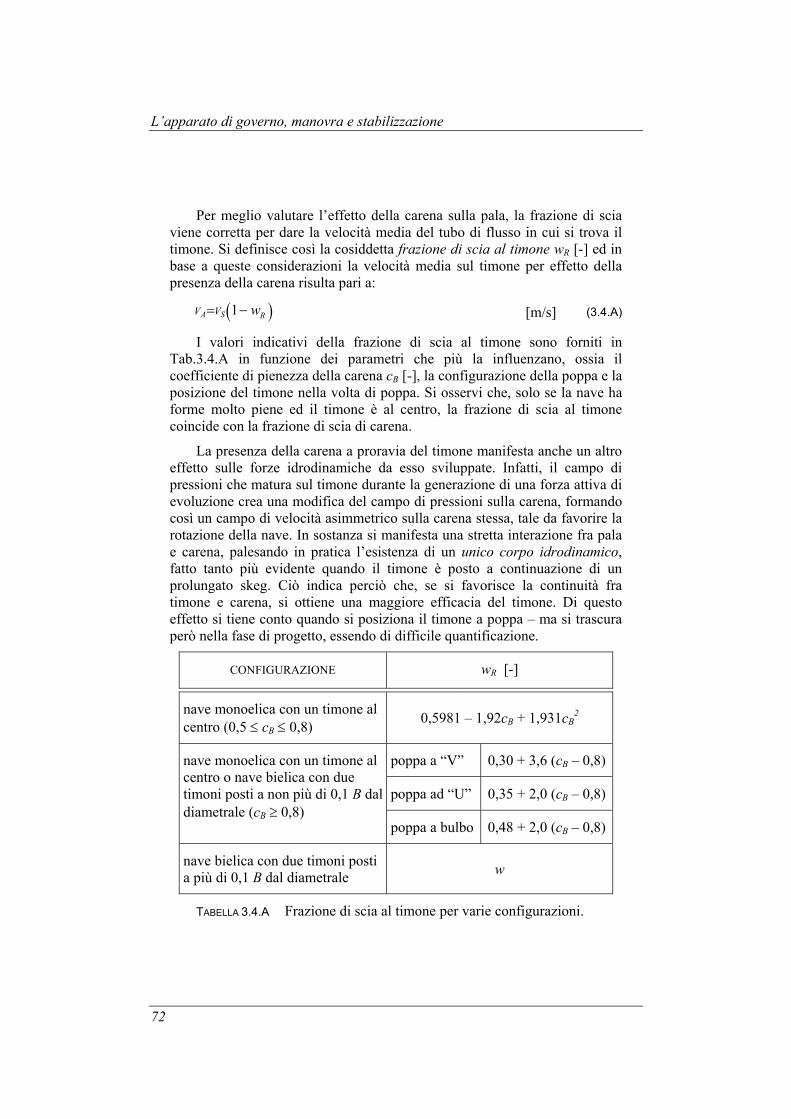
Per meglio valutare l’effetto della carena sulla pala, la frazione di scia viene corretta per dare la velocità media del tubo di flusso in cui si trova il timone. Si definisce così la cosiddetta frazione di scia al timone wR [-] ed in base a queste considerazioni la velocità media sul timone per effetto della presenza della carena risulta pari a:
( )1A S RV V w= − [m/s] (3.4.A)
I valori indicativi della frazione di scia al timone sono forniti in Tab.3.4.A in funzione dei parametri che più la influenzano, ossia il coefficiente di pienezza della carena cB [-], la configurazione della poppa e la posizione del timone nella volta di poppa. Si osservi che, solo se la nave ha forme molto piene ed il timone è al centro, la frazione di scia al timone coincide con la frazione di scia di carena.
La presenza della carena a proravia del timone manifesta anche un altro effetto sulle forze idrodinamiche da esso sviluppate. Infatti, il campo di pressioni che matura sul timone durante la generazione di una forza attiva di evoluzione crea una modifica del campo di pressioni sulla carena, formando così un campo di velocità asimmetrico sulla carena stessa, tale da favorire la rotazione della nave. In sostanza si manifesta una stretta interazione fra pala e carena, palesando in pratica l’esistenza di un unico corpo idrodinamico, fatto tanto più evidente quando il timone è posto a continuazione di un prolungato skeg. Ciò indica perciò che, se si favorisce la continuità fra timone e carena, si ottiene una maggiore efficacia del timone. Di questo effetto si tiene conto quando si posiziona il timone a poppa – ma si trascura però nella fase di progetto, essendo di difficile quantificazione.
CONFIGURAZIONE wR [-]
nave monoelica con un timone al centro (0,5 ≤ cB ≤ 0,8) 0,5981 – 1,92cB + 1,931cB
2
poppa a “V” 0,30 + 3,6 (cB – 0,8)
poppa ad “U” 0,35 + 2,0 (cB – 0,8)
nave monoelica con un timone al centro o nave bielica con due timoni posti a non più di 0,1 B dal diametrale (cB ≥ 0,8)
poppa a bulbo 0,48 + 2,0 (cB – 0,8)
nave bielica con due timoni posti a più di 0,1 B dal diametrale w
TABELLA 3.4.A Frazione di scia al timone per varie configurazioni.
72
Cap.3 – Il progetto del timone
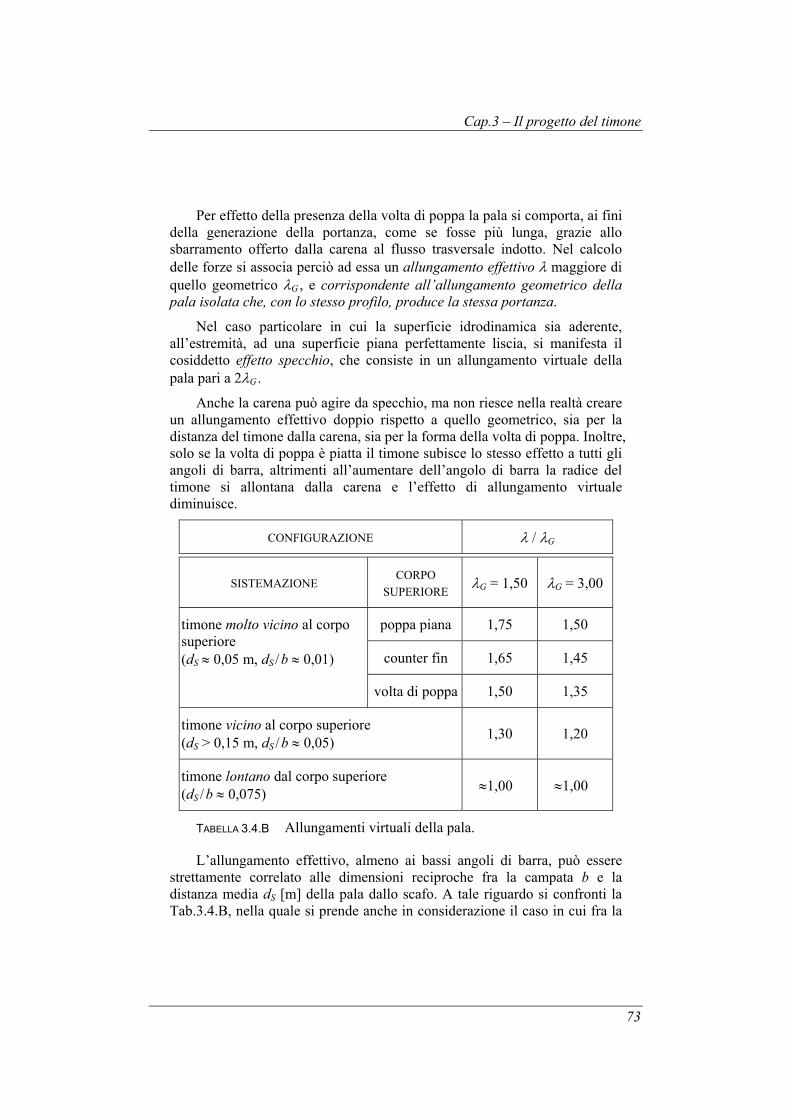
Per effetto della presenza della volta di poppa la pala si comporta, ai fini della generazione della portanza, come se fosse più lunga, grazie allo sbarramento offerto dalla carena al flusso trasversale indotto. Nel calcolo delle forze si associa perciò ad essa un allungamento effettivo λ maggiore di quello geometrico λG , e corrispondente all’allungamento geometrico della pala isolata che, con lo stesso profilo, produce la stessa portanza.
Nel caso particolare in cui la superficie idrodinamica sia aderente, all’estremità, ad una superficie piana perfettamente liscia, si manifesta il cosiddetto effetto specchio, che consiste in un allungamento virtuale della pala pari a 2λG .
Anche la carena può agire da specchio, ma non riesce nella realtà creare un allungamento effettivo doppio rispetto a quello geometrico, sia per la distanza del timone dalla carena, sia per la forma della volta di poppa. Inoltre, solo se la volta di poppa è piatta il timone subisce lo stesso effetto a tutti gli angoli di barra, altrimenti all’aumentare dell’angolo di barra la radice del timone si allontana dalla carena e l’effetto di allungamento virtuale diminuisce.
CONFIGURAZIONE λ / λG
SISTEMAZIONE CORPO SUPERIORE λG = 1,50 λG = 3,00
poppa piana 1,75 1,50
counter fin 1,65 1,45
timone molto vicino al corpo superiore (dS ≈ 0,05 m, dS / b ≈ 0,01)
volta di poppa 1,50 1,35
timone vicino al corpo superiore (dS > 0,15 m, dS / b ≈ 0,05) 1,30 1,20
timone lontano dal corpo superiore (dS / b ≈ 0,075) ≈1,00 ≈1,00
TABELLA 3.4.B Allungamenti virtuali della pala.
L’allungamento effettivo, almeno ai bassi angoli di barra, può essere strettamente correlato alle dimensioni reciproche fra la campata b e la distanza media dS [m] della pala dallo scafo. A tale riguardo si confronti la Tab.3.4.B, nella quale si prende anche in considerazione il caso in cui fra la
73
L’apparato di governo, manovra e stabilizzazione
pala e il fasciame della volta di poppa sia interposta un’appendice fissa (counter fin) per ridurre la distanza fra la radice della pala e la poppa.
Va osservato che, in genere, nelle configurazioni tipiche delle navi mercantili la distanza dS dalla volta di poppa è di qualche decina di centimetri, e quindi l’effetto è piuttosto ridotto – tale distanza non scende comunque al di sotto di 5 cm per evitare il blocco del timone nel caso di formazione di ghiaccio.
Un altro importante effetto è quello della presenza della superficie libera. Le variazioni dinamiche di pressione si possono infatti scaricare sulla superficie libera soprastante formando un’onda di superficie, e ciò si traduce in una riduzione delle forze generate dalla pala.
Al limite, quando il timone è molto caricato e vicino alla superficie, si può anche verificare il fenomeno della ventilazione, con richiamo di bolle d’aria sul dorso della pala in depressione. La presenza della volta di poppa produce una riduzione dell’effetto di superficie libera e, in tale circostanza, tale fenomeno si può ritenere trascurabile quando la pala presenta lo spigolo di radice ad un’immersione pari ad almeno 0,4 bm.
3.5 – L’effetto dell’elica
Anche fra il timone e l’elica propulsatrice si manifesta un’interazione idrodinamica. Gli effetti di tale reciproca interazione sono i seguenti:
• per quanto riguarda la manovra, l’efficienza del timone è accresciuta dalla presenza della scia dell’elica, che non si limita a ridurre l’effetto di scia di carena, ma anzi determina velocità medie sulla pala superiori a quelle di avanzo della nave (sul timone possono maturare forze raddoppiate). Inoltre, si ha il vantaggio di poter sfruttare il timone anche a nave praticamente ferma, creando un flusso netto tramite l’elica;
• per quanto riguarda l’avanzo, la presenza del timone fa aumentare l’efficienza propulsiva grazie al raddrizzamento del flusso, e quindi per effetto del recupero dell’energia associata al moto rotatorio del flusso uscente dall’elica.
perciò il timone, quando possibile, viene posto nella scia dell’elica.
La presenza dell’elica crea infatti una variazione del flusso introducendo un aumento della velocità media sulla pala nella direzione longitudinale, ma causa anche forti disomogeneità e turbolenze. A ciò va aggiunto che la componente trasversale parassita della velocità del flusso dell’elica produce una piccola variazione dell’angolo di attacco medio sulla pala – valutabile in circa 1° – e localmente variazioni quantificabili anche in 10º÷15º, con versi opposti sulla parte superiore e su quella inferiore rispetto al mozzo dell’elica,
74
Cap.3 – Il progetto del timone
(la distribuzione delle pressioni lungo la campata assume un andamento pressoché sinusoidale). Dall’azione dell’elica conseguono quindi, almeno per la parte del timone entro la sua scia, l’aumento della portanza, associato però all’aumento della resistenza, e la tendenza allo stallo.
Complessivamente, sommando l’azione dell’elica a quella della carena, l’effetto più importante che si manifesta sulla pala del timone è la variazione netta della velocità media nella direzione di avanzo. Questo effetto può essere calcolato con la procedura (di seguito descritta) che consiste nel valutare un flusso omogeneo equivalente, ottenuto modificando la velocità del flusso indisturbato, generato dall’avanzo della nave, con fattori legati sia al funzionamento dell’elica sia alle caratteristiche di carena. Se poi il timone non si trova completamente nella scia dell’elica, si calcola una velocità media pesata, proporzionale alle frazioni di area della pala esposte o meno all’elica. In questo modo si trascurano le fluttuazioni di velocità lungo la campata, che non danno comunque un significativo contributo netto sulle forze complessive, e si riconduce lo studio della pala al modello di corpo isolato in flusso omogeneo bidimensionale, in armonia con quanto fatto quando si è definito il concetto di allungamento effettivo.
Si utilizzano comunque spesso procedure semplificate che consistono nel trascurare gli effetti antagonisti della carena e dell’elica: secondo tale approccio lo studio del timone viene impostato in un flusso di velocità pari a quella della nave. Esistono infatti vecchi studi condotti su navi monoelica e bielica con un solo timone a centro nave, che illustrano l’effetto combinato di elica e carena rispettivamente per un timone posto nella scia dell’elica e per un timone al di fuori delle scie. Per queste due configurazioni sono state fatte prove su timone dietro lastra piana (condizione di riferimento), dietro carena e dietro carena con elica in funzione. Tali studi, che confermano l’applicabilità del metodo approssimato, mostrano sostanzialmente che per una nave monoelica con timone al centro:
• la presenza della carena comporta un’accentuata riduzione delle forze generate dal timone rispetto al caso di timone dietro lastra piana,
• la presenza della carena e dell’elica in funzione comportano effetti opposti che tendono a compensarsi (sempre rispetto al caso di timone dietro lastra piana),
mentre per una nave bielica con timone al centro la presenza della carena e dell’elica in funzione comportano effetti opposti che però non si compensano, infatti l’effetto di scia di carena è preponderante.
Per quanto riguarda il calcolo della velocità media sulla pala posta nella scia dell’elica, si fa qui riferimento alla studio dell’elica propulsatrice sviluppato in seno alla teoria della quantità di moto.
75

L’apparato di governo, manovra e stabilizzazione
Si definisce perciò δVA [m/s] l’incremento totale di velocità impresso sull’acqua dall’elica immersa nella scia di carena, e si calcola poi come kmδVA l’incremento parziale di velocità che si realizza ad una certa distanza alle spalle del disco dell’elica, km rappresenta infatti il coefficiente correttivo per tenere conto della posizione della pala a valle del disco dell’elica. Si ha perciò sulla pala del timone la velocità VA così calcolata:
δR A mV V Vk+= A [m/s] (3.5.A)
in cui il fattore km è desumibile dalla Tab.3.4.C, ove viene espresso in funzione del parametro kl definito come kl = l /De in cui l [m] è la distanza longitudinale fra l’asse di rotazione della pala ed il disco dell’elica e De [m] è il diametro dell’elica. Si osservi che il fattore km , come previsto dalla teoria della quantità di moto, assume il valore 0,5 sul disco dell’elica e tende ad 1,0 al crescere di kl, assumendo il valore di circa 0,96 per mentre per kl = 1.
POSIZIONE km
0 ≤ l / De ≤ 0,25 0,50 2,04 3,52 2l lk k+ −
0,25 ≤ l / De ≤ 1,0 ( ) (0,79 0,45 0,25 0,30 0,25 2l lk k+ − − − )
TABELLA 3.5.A Fattori di correzione del flusso dell’elica.
Secondo la teoria della quantità di moto, con riferimento al coefficiente di spinta CT [-] – definito come CT = T / (½ VA
2ρAO), dove T [N] è la spinta dell’elica, AO [m2] è l’area del disco dell’elica e ρ [kg/m3] è la massa volumica del liquido –, si valuta l’incremento di velocità δ VA come:
δ ( 1A A TV V C= + 1)− [m/s] (3.5.B)
Da ciò consegue che sulla pala nella scia dell’elica si ha una velocità pari a
1 ( 1 1)R A m TV V k C = + + − [m/s] (3.5.C)
mentre sulla parte di timone esterna al tubo di flusso dell’elica vale semplicemente VR = VA. L’aumento della portanza nella scia dell’elica è più accentuato se il timone si estende oltre il tubo di flusso dell’elica, sia verso l’alto sia verso il basso (a tale proposito va tenuto conto della contrazione della scia).
In base a quanto detto, risulta evidente che il timone sperimenta un recupero maggiore di velocità se è posto sufficientemente lontano dall’elica (ad una distanza pari ad almeno un diametro dell’elica), mentre è evidente che tanto
76
Cap.3 – Il progetto del timone
più è vicino all’elica, tanto maggiore è l’effetto di recupero di efficienza propulsiva. Inoltre, la vicinanza all’elica può comportare deleteri effetti di erosione e vibrazioni indotte dal flusso disomogeneo dell’elica.
Un altro fenomeno importante nel funzionamento del timone è quello legato alla cavitazione. Infatti, quando localmente la pressione assoluta scende al di sotto della tensione di vapore dell’acqua si formano bolle di vapore. Si rammenta a riguardo che nelle condizioni standard (temperatura di 15°C), la tensione di vapore pV dell’acqua di mare è di 1962 Pa, pari a circa il 2% della pressione atmosferica (patm = 101367 Pa), e varia in funzione della temperatura (la variazione è di ±1% rispetto alla pressione atmosferica).
Queste bolle si formano nelle zone in cui si manifesta una depressione dinamica e vengono trasportate poi in zone dove la pressione è maggiore, dove possono implodere. L’implosione genera microscopici getti d’acqua ad alta velocità che possono colpire la pala, causando l’erosione della superficie della pala stessa (erosione che viene poi amplificata dalla corrosione) e vibrazioni che possono essere trasmesse allo scafo. Esistono diverse modalità di sviluppo della cavitazione sul timone:
• la cavitazione a bolle sul dorso della pala − è legata alle modalità di funzionamento del profilo idrodinamico, infatti la presenza di una zona di depressione dinamica, con pressioni assolute negative, favorisce la formazione di bolle di vapore. La cavitazione sul dorso causa, oltre ad erosione, anche una modifica dell’intero campo di pressioni poiché viene favorito il distacco dello strato limite sul dorso stesso (come conseguenza si riduce la portanza complessiva e aumenta la resistenza).
• la cavitazione associata alle scie vorticali − si verifica poiché nel cuore di un vortice, dove il campo di velocità è in condizione di massimo, si possono creare forti depressioni dinamiche e quindi veri e propri “tubi di cavitazione”. La formazione di vortici si verifica nelle zone di discontinuità della pala, soprattutto alle estremità del bordo inferiore e tra la pala e gli elementi fissi di sostegno, oppure trae origine dalle estremità delle pale dell’elica e dal mozzo della stessa.
L’analisi della propensione alla cavitazione viene fatta solamente sui timoni che risultano particolarmente caricati in virtù delle condizioni di funzionamento e della forma della distribuzione di pressione tipica del profilo utilizzato. Tale valutazione viene fatta analizzando la depressione che nasce sul dorso della pala: esistono infatti utili diagrammi che, in funzione del tipo di profilo e del carico che si realizza sulla generica corda (portanza locale), forniscono il valore della depressione idrodinamica estrema –∆pM che si realizza sulla pala. È interessante notare che in questi grafici la depressione dinamica viene espressa in funzione della portanza specifica, in modo da prescindere dalle particolari condizioni di funzionamento del
77
L’apparato di governo, manovra e stabilizzazione
profilo (tipo di flusso, velocità del flusso, forma della pala, angolo di attacco).
Il valore così ottenuto per la depressione massima –∆pM sul dorso del profilo deve poi essere sommato algebricamente al battente statico po ed al valore della pressione atmosferica patm, per essere infine confrontato con la tensione di vapore pV dell’acqua di mare alla massima temperatura di esercizio. Per non incorrere nella cavitazione deve verificarsi che:
M o atm Vp p p p−∆ + + > [Pa] (3.5.D)
In virtù delle approssimazioni nel calcolo del flusso indotto localmente dall’elica, la pressione assoluta su ogni punto della pala deve risultare ben al di sopra dello zero affinché vi sia certezza che la cavitazione non si inneschi.
L’insorgere della cavitazione sui timoni è favorito da alti valori di velocità d’avanzo della nave e di carico dell’elica. Le situazioni più critiche sono quelle in cui questo fenomeno si manifesta anche per piccoli angoli di barra del timone: è il caso delle navi che hanno una velocità di crociera superiore a 22 nodi e timone nella scia di un’elica avente una potenza specifica superiore a 700 kW/m2. Sulle navi che hanno velocità di crociera più basse ma superiori a 10 nodi la cavitazione si verifica solamente ad elevati angoli di barra del timone, e quindi non interessa gli angoli di normale utilizzo per la correzione della rotta.
Per quanto riguarda infine la cavitazione associata alle scie vorticali proprie del timone, si può ridurre solo con un buon progetto dei particolari costruttivi della pala adottando estremità di pala arrotondate. In alternativa, per la costruzione del mantello si devono usare materiali che rispetto all’acciaio dolce siano più resistenti all’erosione (acciai austenitici o alcuni tipi di bronzo), infatti i rivestimenti con vernici non risultano talvolta sufficientemente protettivi.
3.6 – Le forze sulla pala
La risultante degli sforzi tangenziali e normali trasmessi alla pala immersa nel flusso reale appena descritto è la forza F [N] che agisce su una retta d’azione essenzialmente contenuta nel piano del profilo, ha infatti componenti di portanza L e di resistenza D ma è trascurabile la componente nella direzione della campata. L’angolo di abbattimento della forza F misurato rispetto alla normale alla corda viene indicato con ϕ [°] e l’efficacia idrodinamica della pala, detta anche rendimento, è definita come rapporto L/D ed è inversamente proporzionale al valore dell’angolo di abbattimento.
La retta d’azione della forza F interseca il piano diametrale in un punto detto centro di pressione ed indicato con la sigla CP, in esso si considera applicato il vettore della forza. Le coordinate del centro di pressione,
78
Cap.3 – Il progetto del timone
misurate lungo le direzioni della corda e della campata, sono fornite rispetto al bordo di attacco (distanza CPC) e rispetto allo spigolo superiore (distanza CPS).
Di pratico interesse sono anche le due componenti orizzontali della forza F calcolate nella direzione del piano diametrale della pala, la forza assiale FA [N], e nella direzione ad essa ortogonale, la forza normale FN [N], facilmente calcolabili in funzione di L e D, infatti valgono le relazioni:
FA = D cosα – L sinα [N] (3.6.A)
FN = D sinα + L cosα [N] (3.6.B)
che permettono una immediata valutazione delle forze scaricate sull’asta del timone.
Il momento torcente Q [Nm] generato sul timone dalla forza idrodinamica si può calcolare una volta che è nota la distanza tra il centro di pressione e l’asse di rotazione della pala. Indicando con d la distanza, misurata all’altezza di CP, tra il bordo d’ingresso e l’asse del timone, il braccio con cui lavora la forza attiva FN vale (d – CPC), cosicché il momento torcente sull’asta risulta fornito dalla relazione:
Q = FN (d – CPC) [Nm] (3.6.C)
Per definizione il momento torcente generato dal flusso è quindi negativo se il centro di pressione si trova a poppavia dell’asse di rotazione. È questo il caso di timone stabile, così definito perché, a riposo al centro, è in condizione di equilibrio stabile, infatti se spostato dalla posizione neutra e poi lasciato libero torna nella posizione iniziale. Di conseguenza, in questo caso, risulta positivo il momento che deve essere generato all’equilibrio dal macchinario di agghiaccio.
Il centro di pressione non è in genere fisso al variare dell’angolo di barra, ma tende a spostarsi verso poppavia con l’aumentare dell’angolo di barra del timone, o meglio con l’aumentare dell’angolo di attacco. Di conseguenza, si può verificare la situazione di timone inizialmente instabile se l’asse di rotazione si trova leggermente a proravia del centro di pressione ai piccoli angoli di barra, ma si sposta poi a poppavia per angoli maggiori. Tale situazione favorisce la movimentazione agli angoli tipici del controllo di rotta (operazione per la quale il timone è fortemente utilizzato), per i quali al macchinario è richiesto un momento minore rispetto al caso di timone stabile, ma può creare problemi di usura e di affaticamento ai macchinari stessi ed alle strutture portanti. La timoneria risulta infatti sempre sotto carico ed è costretta a generare momenti di equilibrio alternati poiché il momento antagonista è così piccolo che può cambiare orientazione per azione di forze accidentali.
79
L’apparato di governo, manovra e stabilizzazione
Allo scopo di ridurre lo sforzo di torsione richiesto al macchinario, ma con l’obiettivo di avere un timone stabile, si fa in modo che il centro di pressione si trovi il più vicino possibile all’asse di rotazione, almeno ai piccoli angoli, ma sempre a poppavia di quest’ultimo. Tale bilanciamento si ottiene fissando il valore del grado di compenso della pala.
Le forze idrodinamiche fin qui introdotte vengono usualmente adimensionalizzate per facilitare il confronto fra le prestazioni di timoni che hanno forme e dimensioni diverse. Tale confronto è possibile solo se si conosce la legge di similitudine che regola il fenomeno, che verrà qui di seguito illustrata.
3.7 – I coefficienti idrodinamici
Le quantità dimensionali significative che caratterizzano il fenomeno della generazione della forza idrodinamica F sulla superficie di controllo, isolata e immersa in un flusso stazionario omogeneo di fluido reale, sono:
• caratteristiche della pala – l’area della superficie idrodinamica AR [m2], la forma della superficie, che può essere individuata da una serie di N parametri geometrici, qui indicati genericamente come s1, ..., sN [m], e la forma del profilo idrodinamico, espresso analogamente a quanto sopra da una serie di M parametri geometrici, qui indicati genericamente come sN+1, ..., sN+M [m];
• caratteristiche del fluido – la massa volumica ρ [kg m-3] e la viscosità dinamica µ [kg m-1s-1];
• caratteristiche del flusso sulla pala – la velocità media VR [m s-1] e l’angolo di attacco α [rad].
La valutazione della legge di similitudine relativa alla generazione della forza F sulla pala può essere effettuata applicando il Teorema di Vaschy alla funzione omogenea che rappresenta il fenomeno fisico in termini esatti:
ψ [F, AR, (s1, ..., sN+M), ρ, µ, VR, α] = 0 [-] (3.7.A)
Va osservato che in tali indagini è usuale trascurare l’effetto della viscosità dinamica µ del fluido, sebbene al prezzo di introdurre un effetto di scala, perciò la funzione si riscrive come:
ψ [F, AR, (s1, ..., sN+M), ρ, VR, α] = 0 [-] (3.7.B)
Si osservi poi che se si vuole analizzare il comportamento di superfici idrodinamiche di forma nota, e costituite da profili ben definiti, sotto l’azione di un flusso a diversi angoli di attacco, allora le M+N grandezze fisiche s1,..., sN+M e l’angolo α potranno essere considerati, volta per volta, come parametri prefissati dell’indagine ed assumeranno valori costanti. In altre parole, eliminando le variabili appena indicate si può studiare il
80
Cap.3 – Il progetto del timone
fenomeno fisico in maniera esatta esclusivamente sotto l’effetto delle quantità rimanenti [F, AR, ρ, µ, VR]. Ciò consentirà ad esempio di trattare la similitudine geometrica di una pala dalle caratteristiche prefissate, oppure di confrontare pale che hanno forme diverse, ma sempre a parità di angolo di attacco del flusso.
Nell’ipotesi di trascurare l’effetto della viscosità e di considerare le grandezze [(s1,..., sN+M), α] come parametri dell’indagine fissati a priori, la legge di similitudine si riscrive nella forma ridotta:
ψ [F, AR, ρ, VR] = 0 [-] (3.7.C)
Dallo sviluppo dell’analisi dimensionale delle grandezze fisiche, essendo 3 le grandezze fondamentali coinvolte e 4 le quantità dimensionali caratterizzanti il fenomeno, si può ottenere una relazione esplicita fra tali quantità, ed in particolare si può scrivere la relazione:
F = k AR ρ VR2 [N] (3.7.D)
in cui la funzione adimensionale di proporzionalità k dipende dalle grandezze utilizzate come parametro, ossia dall’angolo di attacco e dalla forma della superficie e del profilo della pala, in altre parole si può scrivere che k = k[(s1,..., sN+M), α].
Usualmente, nell’espressione della forza idrodinamica F viene introdotto il fattore 0,5 in modo che il prodotto (½ ρ VR
2) corrisponda alla pressione dinamica q [Pa] nel punto di ristagno che si crea sul bordo di attacco del profilo. Di conseguenza, nell’espressione di F, la funzione di proporzionalità si modifica e viene indicata, per ogni pala di forme note, con c(α) per mettere in evidenza la dipendenza dall’angolo di attacco. In conclusione, per una pala di forme note, la similitudine che si instaura, nel calcolo delle forze idrodinamiche, è espressa dalla relazione:
F = c(α) q AR [N] (3.7.E)
La legge di similitudine appena introdotta consente di effettuare le seguenti operazioni:
• ricavare la forza idrodinamica F di una pala di forma e profilo noti partendo dalla conoscenza della funzione di proporzionalità c(α) ottenuta per un qualsiasi valore delle grandezze ρ, vR ed AR. Infatti, D’altro lato, se per una pala di forma e profilo fissati la funzione c(α) è stata misurata sperimentalmente, ossia sono noti i valori del cosiddetto coefficiente idrodinamico c al variare dell’angolo di attacco α, è nota anche la forza idrodinamica F che su di essa matura. In base a quanto finora detto, c può essere determinato con prove in scala, perché è indipendente dalle dimensioni assolute del timone; inoltre le prove possono essere condotte a qualsiasi velocità ed in
81

L’apparato di governo, manovra e stabilizzazione
qualsiasi fluido. In realtà la viscosità, anche per valori bassi (l’acqua e l’aria sono fluidi poco viscosi), ha una sua importanza nel fenomeno di generazione delle forze idrodinamiche.
• confrontare le forze prodotte da soluzioni diverse, in quanto a forma della pala e del profilo, semplicemente confrontando i coefficienti c(α), ovviamente nell’ipotesi che le pale abbiano la stessa area AR e lavorino nello stesso fluido.
É comunque da intendersi che tali operazioni di similitudine devono essere eseguite a parità di condizioni del flusso, vale a dire con riferimento al flusso omogeneo. Le correzioni per conteggiare gli effetti della carena e dell’elica devono essere effettuate successivamente. Infatti, i coefficienti delle forze idrodinamiche effettive (condizioni di funzionamento reali nella volta di poppa) vengono usualmente dedotti con procedimenti semi–empirici dai valori ottenuti su pale isolate (condizioni di funzionamento ideali)
I più comuni coefficienti idrodinamici correlati al funzionamento del timone (si veda la Tab.3.7.A) sono quelli relativi alla portanza cL, alla resistenza cD ed alla forza normale cN, quest’ultimo esprimibile anche in funzione dei due precedenti. Dalla definizione delle forze idrodinamiche si ricavano inoltre le seguenti relazioni:
2 2F D Lc c c= + [-] (3.7.F)
sin cosN D Lc c cα α= + [-] (3.7.G)
Un altro coefficiente molto usato è quello relativo al momento torcente sull’asta del timone cQ, per il quale il coefficiente di adimensionalizzazione è rappresentato da [q AT cm]; definizioni alternative per il coefficiente adimensionale relativo al momento torcente sono quelle che considerano il momento generato rispetto a direzioni parallele all’asse di rotazione, ma corrispondenti al bordo di attacco del flusso, oppure alla retta per cm / 4, forse più utili in una fase preliminare del progetto quando non è nota con precisione la posizione dell’asse di rotazione.
I coefficienti relativi alle forze di portanza e di resistenza sono calcolati e diagrammati in funzione dell’angolo di attacco e mostrano andamenti tipici:
• la curva relativa al coefficiente di portanza ha inizio dallo zero, ha andamento quasi lineare per bassi angoli per poi giungere ad un massimo seguito da una più o meno brusca caduta, l’angolo per il quale si verifica tale valore massimo viene indicato come angolo di stallo;
• la curva relativa alla resistenza parte da un valore diverso da zero (cD0) ed è monotona crescente.
82

Cap.3 – Il progetto del timone
Anche il rapporto L /D tra la portanza e la resistenza, che definisce il rendimento della pala, viene spesso diagrammato assieme ai coefficienti idrodinamici.
Spesso, in luogo del coefficiente idrodinamico cQ caratterizzante il momento torcente, viene diagrammato il rapporto adimensionale CPC /cm che permette di valutare il braccio, rispetto all’asse di rotazione, con cui lavora la forza FN, consentendo quindi di risalire al momento torcente Q. Meno frequentemente è disponibile il rapporto adimensionale CPS /bm che permette di valutare la distribuzione del carico idrodinamico lungo la campata.
COEFFICIENTE IDRODINAMICO DEFINIZIONE
coefficiente di portanza cL R
Lq A
coefficiente di resistenza cD R
Dq A
coefficiente della forza totale cF R
Fq A
coefficiente della forza normale cN N
R
Fq A
( )N C
R m
F d CPq A c
−
N C
R m
F CPq A c
coefficiente del momento torcente cQ
( )/ 4N m C
R m
F c CPq A c
−
TABELLA 3.7.A Coefficienti idrodinamici di pala.
In luogo dei grafici vengono talvolta forniti i valori dei coefficienti idrodinamici cL e cD e del rapporto CPC /cm calcolati agli angoli di attacco di 10°, 20° e all’angolo di stallo, corredati dalla pendenza di cL all’origine e dal valore iniziale di cD.
83

L’apparato di governo, manovra e stabilizzazione
E’ utile ricordare che le grandezze standard relative alle caratteristiche fisiche dell’acqua dolce, dell’acqua di mare e dell’aria sono fissate da uno standard ITTC. Per applicazioni pratiche, le caratteristiche fisiche dell’acqua possono essere considerate costanti, ovvero indipendenti dalla temperatura e dalla pressione; in Tab.3.7.B sono riportate le grandezze fisiche d’uso più frequente riferite alla temperatura standard di T = 15 °C (si rammenta che la viscosità cinematica è fornita dal rapporto fra la viscosità dinamica e la massa volumica).
FLUIDO GRANDEZZA E VALORE
massa volumica ρ ≈ 1000 kg/m3 tensione di vapore pV 1,14⋅10-6 m2/s acqua dolce
(T = 15°C) viscosità cinematica ν 1962 Pa
massa volumica ρ 1026 kg/m3 acqua di mare (T = 15°C, salinità 3,5%) viscosità cinematica ν 1,19⋅10-6 m2/s
massa volumica ρ 1226 kg/m3 aria secca (patm = 101367 Pa) viscosità cinematica ν 1,45⋅10-5 m2/s
TABELLA 3.7.B Grandezze fisiche d’uso più frequente.
3.8 – I profili idrodinamici
Per mettere in luce la dipendenza delle forze di portanza e resistenza dai singoli parametri di forma che caratterizzano la geometria delle superfici idrodinamiche, è necessario analizzare il campo di pressioni e velocità che matura attorno al corpo immerso nel flusso. Tale indagine può essere convenientemente effettuata in due fasi successive:
• studio del profilo – riguarda l’analisi del campo fluido bidimensionale che si instaura attorno ad un profilo idrodinamico considerato appartenente ad una superficie a sviluppo costante ed allungamento infinito. Questa indagine permette di analizzare il comportamento del profilo indipendentemente dalla forma della pala, e di ottenere le caratteristiche idrodinamiche dello stesso.
• studio della pala – riguarda l’analisi del campo fluido tridimensionale che si instaura attorno ad una pala caratterizzata da un certo profilo e da una certa forma. Questa indagine consente di determinare i coefficienti idrodinamici della pala.
84
Cap.3 – Il progetto del timone
Nel seguito verrà trattata la prima fase di indagine, relativa all’analisi del comportamento dei profili simmetrici, con riferimento alla condizione di fluido reale in flusso omogeneo, stazionario ed ovviamente bidimensionale.
L’effetto di portanza di un corpo idrodinamico ha origine dal campo di pressioni che si viene a generare grazie alla forma e all’angolo di attacco del flusso, caratterizzate da una pressione dinamica sul ventre e da una depressione dinamica sul dorso. Il fenomeno può essere messo in evidenza visualizzando il campo cinematico attorno al corpo: sul dorso si manifesta un’alta velocità e quindi una raccolta delle linee di flusso, sul ventre una bassa velocità e conseguentemente linee di flusso a maggiore spaziatura. Come noto, la portanza viene correlata a questo campo di velocità che dà origine ad una circolazione non nulla della velocità attorno al profilo. Se la differenza di pressione dinamica viene efficacemente mantenuta, si realizza un campo di pressione favorevole al mantenimento della portanza: è perciò essenziale che il flusso scorra con regolarità in prossimità della superficie del profilo alare.
Sulla superficie del corpo immerso nel flusso reale si generano, oltre agli sforzi di pressione, anche sforzi tangenziali, per effetto dei quali la pellicola di fluido a contatto con il corpo si muove in maniera solidale allo stesso: se il moto si realizza con un valore elevato del Numero di Reynolds, e questo è il caso dei timoni navali, il passaggio della velocità dal valore relativo nullo ai valori dettati dal moto esterno avviene in uno strato sottile confinato sulla superficie del corpo, detto strato limite. Al di fuori dello strato limite il campo di velocità non risente praticamente degli effetti della viscosità e il fluido può essere considerato perfetto.
Ritornando alla generazione della portanza, è importante notare come la depressione dinamica sul dorso sia all’origine della maggior parte della portanza e come il picco delle due distribuzioni sia spostato verso il bordo di attacco, con la conseguente localizzazione del centro di pressione nella zona prodiera del profilo. Tale distribuzione della pressione idrodinamica è tipica dei corpi affusolati.
La distribuzione delle pressioni e, in particolare modo, la posizione del punto di minima pressione hanno un notevole effetto sul flusso nello strato limite, soprattutto sul dorso del profilo. Si possono infatti osservare due zone a comportamento ben distinto:
• la zona prodiera, nella quale la velocità locale all’esterno dello strato limite aumenta e contemporaneamente la pressione diminuisce finché in un determinato punto non si raggiunge il picco di depressione, dove la velocità raggiunge il suo massimo.
85
L’apparato di governo, manovra e stabilizzazione
• la parte poppiera, ove il flusso all’esterno dello strato limite è decelerato e la pressione aumenta fino a portarsi al valore della pressione in corrente libera in prossimità del bordo di uscita.
Nella zona prodiera, la diminuzione della pressione, che si trasmette fino a contatto della parete all’interno dello strato limite, ha tendenza a contrastare l’azione ritardatrice degli sforzi d’attrito sulla parete stessa, e quindi a ridurre l’aumento dello spessore dello strato limite che essi tendono a determinare. In altre parole lo sforzo tangenziale si esaurisce a breve distanza dalla superficie e lo strato limite rimane confinato ad uno spessore limitato.
Nella zona poppiera, l’aumento della pressione si associa alla resistenza viscosa nel diminuire l’energia cinetica dello strato limite, che è già di per sé scarsa per la ridotta velocità ivi presente. Infatti, i filetti fluidi devono percorrere un campo caratterizzato da due tipi di resistenza: l’attrito sulla superficie del profilo alare e il gradiente di pressione sfavorevole nella direzione del flusso. Si provoca quindi un ispessimento per rallentamento e, ad un certo punto, addirittura l’arresto dello strato limite. Di conseguenza, più avanti si verifica un vero e proprio moto a ritroso del fluido nella zona prossima alla parete, lambito dalla corrente esterna che scorre in verso opposto: il contatto fra i due moti contrari dà luogo ad una scia di vortici. La zona a valle del punto di distacco è infatti spiccatamente instabile e degenera in formazioni vorticose, essa costituisce la cosiddetta scia vorticosa.
Il fenomeno descritto prende il nome di separazione della corrente ed è all’origine del mancato recupero delle pressioni a poppavia del profilo e quindi della resistenza di forma.
Inoltre, con l’aumento dell’angolo di incidenza del flusso, il punto di separazione della scia si sposta verso il bordo di attacco in concomitanza con un campo di pressione sempre più sbilanciato in avanti (ma con un picco che si riduce d’intensità e che pesa sempre meno nella generazione della portanza lungo la corda). L’effetto è quello di contrastare l’insorgere della portanza mentre aumenta l’angolo di attacco. Confrontando infatti due situazioni di lavoro di un profilo, caratterizzate da angoli diversi di attacco, si vedono punti di separazione a distanze diverse dal naso del profilo e di conseguenza si osserva che il gradiente di crescita della portanza del profilo, in funzione dell’angolo di attacco, tende a calare (ossia la portanza manifesta un andamento sotto–lineare): a uguali incrementi dell’angolo di attacco corrispondono incrementi sempre più ridotti della portanza poiché, mentre la pressione tende a crescere nella zona prodiera, il punto di separazione si avvicina sempre più al bordo di attacco e diminuisce la zona utile per la generazione della portanza.
86
Cap.3 – Il progetto del timone
Se il punto di distacco si mantiene a poppa, anche ad elevati angoli di incidenza, allora la riduzione del gradiente di portanza è contenuta. Se invece il punto di separazione del flusso si estende in avanti verso il bordo attacco, può verificarsi una forte riduzione del gradiente di portanza, tale addirittura da far diminuire la portanza all’aumentare dell’angolo di incidenza, anche in maniera drastica: si è raggiunto lo stato di stallo, caratterizzato dalla separazione a corda completa, ossia sull’intera zona del dorso del profilo.
Parallelamente anche la resistenza è influenzata dalla posizione del punto di distacco: se lo strato limite si mantiene attaccato al profilo la resistenza è soprattutto dovuta all’attrito, in caso contrario si somma anche la componente dovuta al mancato recupero delle pressioni.
3.9 – L’analisi dei profili idrodinamici
Una volta illustrate le modalità di funzionamento del generico profilo idrodinamico, possiamo passare al confronto del comportamento dei profili di forma diversa. A tale riguardo vanno distinti gli effetti dovuti a tre diverse cause:
• l’allungamento, • la forma dei fianchi, • la posizione della sezione massima.
Per quanto riguarda l’influenza dell’allungamento del profilo, ossia del rapporto fra lo spessore massimo e la corda, si possono evidenziare due tipi di funzionamento, indicati come tipici dei profili sottili e dei profili spessi.
Sui profili sottili si verifica una situazione di portanza caratterizzata da un andamento prossimo alla linearità al variare dell’angolo di attacco, e contemporaneamente una resistenza ridotta. Ciò ha origine dal fatto che il gradiente favorevole di pressione permane per un lungo tratto della corda, favorito dalla forma affusolata e slanciata, ed in più i gradienti non sono fortemente accentuati dalla forma del profilo. Il punto di distacco rimane perciò verso il bordo di uscita determinando lungo la corda un’estesa zona utile per la generazione della portanza.
Se però il profilo affusolato lavora ad angoli di attacco elevati, può manifestarsi la formazione di una “bolla” sul bordo di attacco. E’ questo il caso di una zona morta che si genera sul dorso a causa dell’eccessiva curvatura dello spigolo: questa prima separazione può poi annullarsi per effetto del gradiente favorevole di corrente, ma può anche protrarsi fino alla zona di separazione di poppa (nel complesso essa favorisce la formazione del distacco in coda). La forma del bordo di attacco – ovvero il raggio di curvatura del bordo di attacco – gioca un ruolo importante nel favorire la
87
L’apparato di governo, manovra e stabilizzazione
formazione della bolla. Quando essa si forma la portanza decresce bruscamente determinando una repentina condizione di stallo.
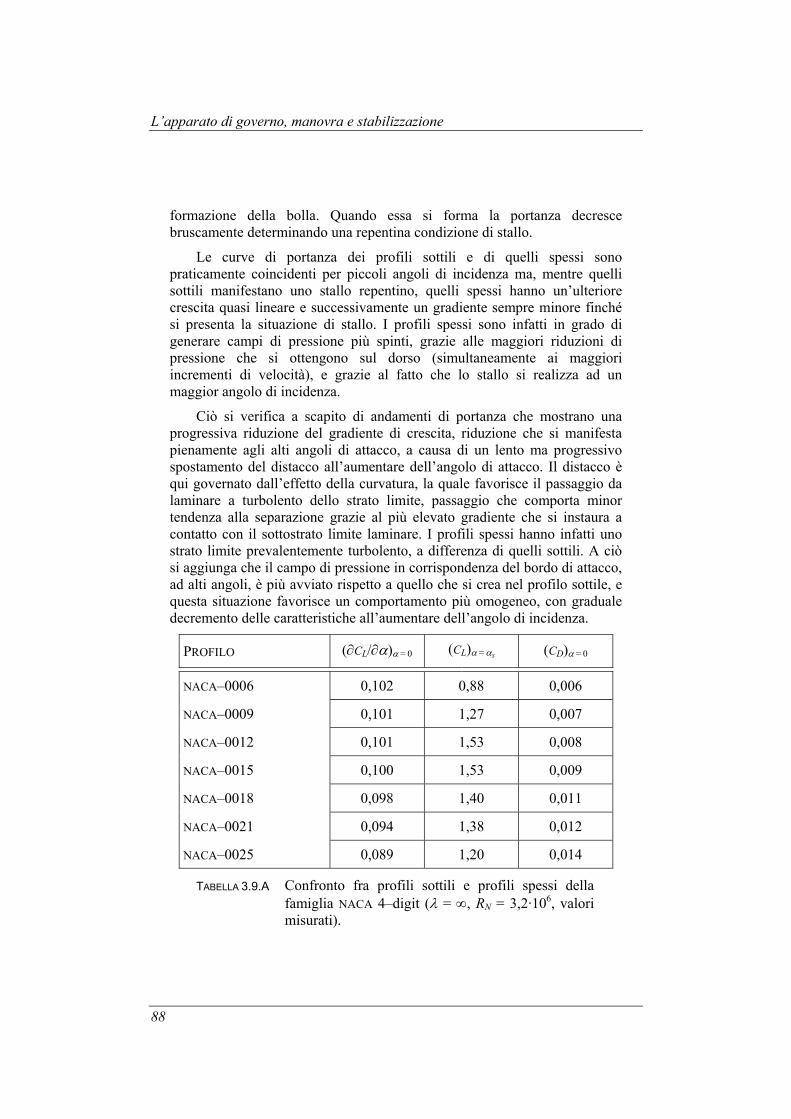
Le curve di portanza dei profili sottili e di quelli spessi sono praticamente coincidenti per piccoli angoli di incidenza ma, mentre quelli sottili manifestano uno stallo repentino, quelli spessi hanno un’ulteriore crescita quasi lineare e successivamente un gradiente sempre minore finché si presenta la situazione di stallo. I profili spessi sono infatti in grado di generare campi di pressione più spinti, grazie alle maggiori riduzioni di pressione che si ottengono sul dorso (simultaneamente ai maggiori incrementi di velocità), e grazie al fatto che lo stallo si realizza ad un maggior angolo di incidenza.
Ciò si verifica a scapito di andamenti di portanza che mostrano una progressiva riduzione del gradiente di crescita, riduzione che si manifesta pienamente agli alti angoli di attacco, a causa di un lento ma progressivo spostamento del distacco all’aumentare dell’angolo di attacco. Il distacco è qui governato dall’effetto della curvatura, la quale favorisce il passaggio da laminare a turbolento dello strato limite, passaggio che comporta minor tendenza alla separazione grazie al più elevato gradiente che si instaura a contatto con il sottostrato limite laminare. I profili spessi hanno infatti uno strato limite prevalentemente turbolento, a differenza di quelli sottili. A ciò si aggiunga che il campo di pressione in corrispondenza del bordo di attacco, ad alti angoli, è più avviato rispetto a quello che si crea nel profilo sottile, e questa situazione favorisce un comportamento più omogeneo, con graduale decremento delle caratteristiche all’aumentare dell’angolo di incidenza.
PROFILO (∂CL/∂α)α = 0 (CL)α = αS (CD)α = 0
NACA–0006 0,102 0,88 0,006
NACA–0009 0,101 1,27 0,007
NACA–0012 0,101 1,53 0,008
NACA–0015 0,100 1,53 0,009
NACA–0018 0,098 1,40 0,011
NACA–0021 0,094 1,38 0,012
NACA–0025 0,089 1,20 0,014
TABELLA 3.9.A Confronto fra profili sottili e profili spessi della famiglia NACA 4–digit (λ = ∞, RN = 3,2·106, valori misurati).
88
Cap.3 – Il progetto del timone
Si confrontino a riguardo i valori caratteristici di risposta di profili sottili e di profili spessi caratterizzati dalla stessa forma e riportati nella Tab.3.9.A (famiglia di profili NACA–00), in cui è evidente un lieve vantaggio dei profili sottili ai piccoli angoli di attacco, una portanza massima molto più alta nei profili spessi ed assieme resistenze maggiori.
La resistenza di forma è in genere più elevata per i profili spessi, ed anche quella d’attrito è maggiore, a causa del flusso fortemente turbolento nello strato limite. In generale, il rendimento del profilo spesso è minore.
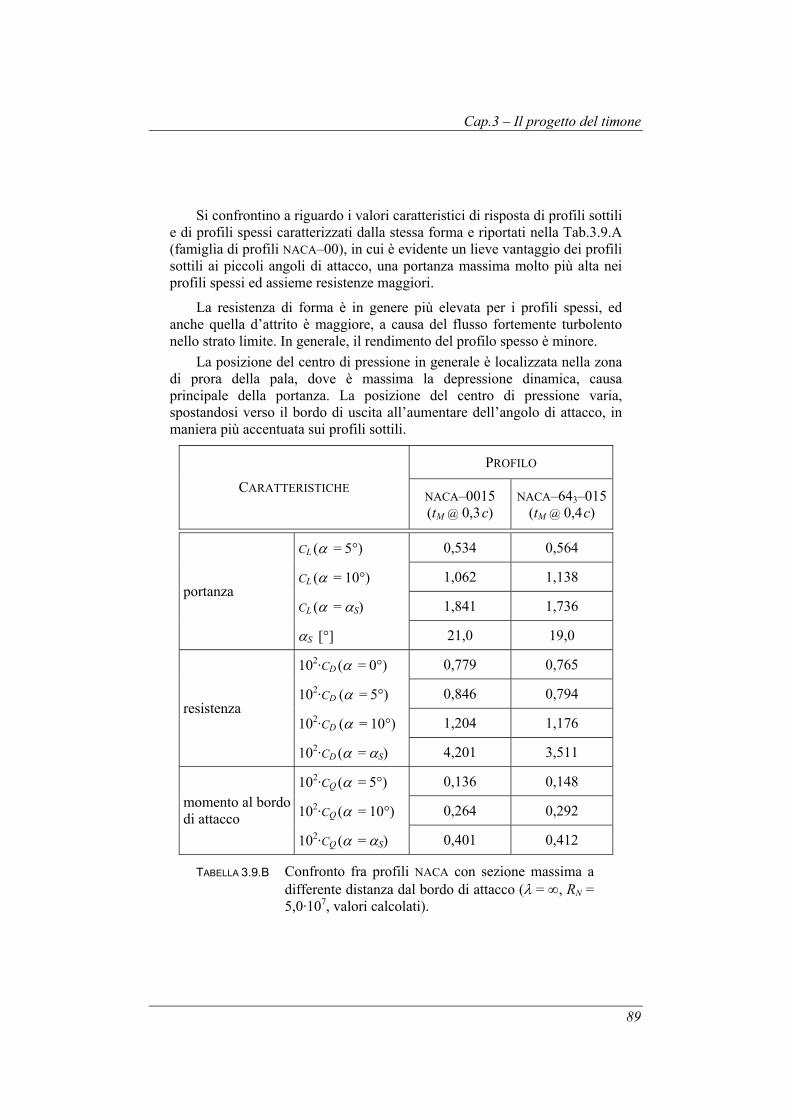
La posizione del centro di pressione in generale è localizzata nella zona di prora della pala, dove è massima la depressione dinamica, causa principale della portanza. La posizione del centro di pressione varia, spostandosi verso il bordo di uscita all’aumentare dell’angolo di attacco, in maniera più accentuata sui profili sottili.
PROFILO
CARATTERISTICHE NACA–0015 (tM @ 0,3 c)
NACA–643–015 (tM @ 0,4 c)
CL (α = 5°) 0,534 0,564
CL (α = 10°) 1,062 1,138
CL (α = αS) 1,841 1,736 portanza
αS [°] 21,0 19,0
102·CD (α = 0°) 0,779 0,765
102·CD (α = 5°) 0,846 0,794
102·CD (α = 10°) 1,204 1,176 resistenza
102·CD (α = αS) 4,201 3,511
102·CQ (α = 5°) 0,136 0,148
102·CQ (α = 10°) 0,264 0,292 momento al bordo di attacco
102·CQ (α = αS) 0,401 0,412
TABELLA 3.9.B Confronto fra profili NACA con sezione massima a differente distanza dal bordo di attacco (λ = ∞, RN = 5,0·107, valori calcolati).
89
L’apparato di governo, manovra e stabilizzazione
Per quanto riguarda l’influenza della posizione della sezione massima, i profili con allungamento uguale hanno caratteristiche idrodinamiche genericamente migliori se la sezione massima si allontana dal bordo di attacco, infatti si prolunga il gradiente favorevole di depressione dinamica. Se però la sezione di massima area si allontana troppo, il bordo di attacco rischia di diventare troppo affusolato, e conseguentemente il profilo tende a comportarsi come un profilo sottile.
La permanenza della lunga zona a gradiente di pressione negativo favorisce, ai bassi angoli di attacco, l’instaurarsi di uno strato limite laminare, con il vantaggio di una resistenza frizionale contenuta: tale comportamento è caratteristico dei cosiddetti profili laminari.
In genere, per i profili standard, lo spessore massimo si realizza tra il 20% e il 40% della corda dal bordo d’ingresso. I profili con massimo spessore spostato verso poppa sono da preferirsi se si presenta il rischio di cavitazione, infatti comportano distribuzioni di pressione più omogenee caratterizzate da un esteso plateau in luogo di un picco accentuato (vale ovviamente che i profili meno caricati sono i più adatti nei casi di rischio di cavitazione).
Per un confronto fra due profili aventi uguale allungamento e posizione diversa della sezione massima si confrontino i valori dei coefficienti idrodinamici riportati in Tab.3.9.B, dai quali risulta che il profilo con spessore massimo al 40% della corda, rispetto a quello con spessore massimo al 40% della corda, genera una portanza maggiore ai bassi angoli, ma ha uno stallo ad un angolo minore (per effetto della “bolla” sul bordo di attacco), ha una minore resistenza e ha il centro di pressione leggermente più a poppavia.
Un’altra caratteristica che ha molta influenza sulle prestazioni idrodinamiche è la forma stessa del profilo, ossia la legge di distribuzione degli spessori. La forma dell’area trasversale del profilo rimane essenzialmente quella di una goccia più o meno allungata per la quale, come precedentemente indicato, risulta molto importante il raggio di curvatura del bordo di attacco. I profili convenzionali hanno fianchi piani o superficie convessa, ma esistono anche profili con fianchi concavo–convessi, ossia con mantelli a doppia curvatura.
I profili concavo–convessi sono conformati in modo da esasperare il picco di pressione in corrispondenza del bordo di ingresso del flusso, anche con uno spostamento in avanti della sezione di massima area: la particolare forma comporta infatti una forte accelerazione del flusso nella zona prodiera.
Tali profili hanno, al bordo di uscita, mantelli paralleli che possono essere chiusi con un taglio netto di coda, sia per ragioni di robustezza che per motivi costruttivi. L’effetto di un bordo di uscita spesso è quello di creare un
90
Cap.3 – Il progetto del timone
allungamento virtuale che influenza positivamente il campo di pressioni sul dorso, infatti lo strato limite viene aspirato dalla scia che si forma in coda, ritardando così la separazione. Questo fenomeno viene accentuato con un bordo di uscita concavo, il cosiddetto fish tail.
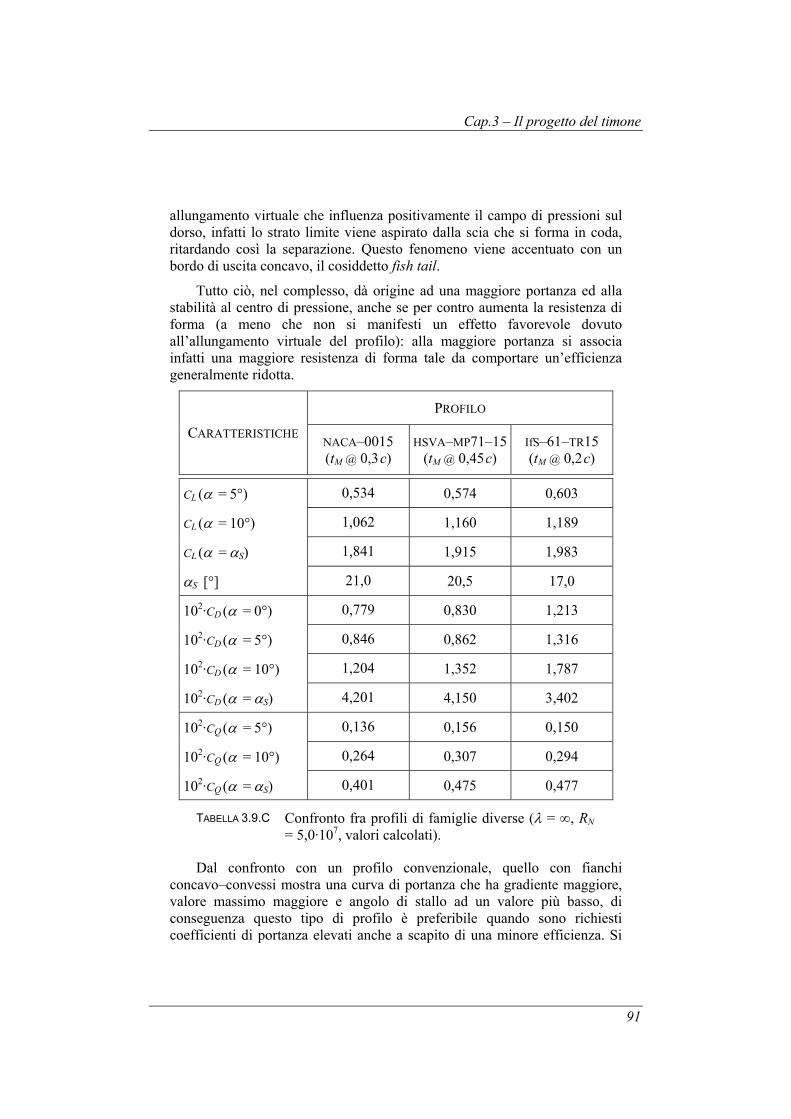
Tutto ciò, nel complesso, dà origine ad una maggiore portanza ed alla stabilità al centro di pressione, anche se per contro aumenta la resistenza di forma (a meno che non si manifesti un effetto favorevole dovuto all’allungamento virtuale del profilo): alla maggiore portanza si associa infatti una maggiore resistenza di forma tale da comportare un’efficienza generalmente ridotta.
PROFILO
CARATTERISTICHE NACA–0015 (tM @ 0,3 c)
HSVA–MP71–15 (tM @ 0,45 c)
IfS–61–TR15 (tM @ 0,2 c)
CL (α = 5°) 0,534 0,574 0,603
CL (α = 10°) 1,062 1,160 1,189
CL (α = αS) 1,841 1,915 1,983
αS [°] 21,0 20,5 17,0
102·CD (α = 0°) 0,779 0,830 1,213
102·CD (α = 5°) 0,846 0,862 1,316
102·CD (α = 10°) 1,204 1,352 1,787
102·CD (α = αS) 4,201 4,150 3,402
102·CQ (α = 5°) 0,136 0,156 0,150
102·CQ (α = 10°) 0,264 0,307 0,294
102·CQ (α = αS) 0,401 0,475 0,477
TABELLA 3.9.C Confronto fra profili di famiglie diverse (λ = ∞, RN = 5,0·107, valori calcolati).
Dal confronto con un profilo convenzionale, quello con fianchi concavo–convessi mostra una curva di portanza che ha gradiente maggiore, valore massimo maggiore e angolo di stallo ad un valore più basso, di conseguenza questo tipo di profilo è preferibile quando sono richiesti coefficienti di portanza elevati anche a scapito di una minore efficienza. Si
91
L’apparato di governo, manovra e stabilizzazione
confrontino a riguardo in Tab.3.9.C i valori caratteristici di risposta di profili di famiglie e forme diverse aventi lo stesso valore di allungamento.
Di tutte queste tipologie sono disponibili, oltre ai valori dei coefficienti idrodinamici, anche i diagrammi dei coefficienti di pressione cp per angolo di attacco nullo, che illustrano la distribuzione lungo la corda delle depressioni idrodinamiche causate dal solo effetto dello spessore.
Il coefficiente di pressione cp [-] è definito come il rapporto fra la depressione idrodinamica –∆p lungo la corda e la variazione di pressione q nel punto di ristagno, cosicché:
ppc
q−∆
= [-] (3.9.A)
la quale, riscritta in funzione delle velocità del campo a potenziale che lambisce il profilo, diventa:
2
1pV
Vc
∞
= −
[-] (3.9.B)
in cui V∞ è la velocità del flusso indisturbato e V è la velocità indotta lungo la corda sia dalla distribuzione degli spessori (nella sua componente indicata usualmente con Vt), sia dall’angolo di attacco (nella sua componente indicata usualmente con δVa):
δt aV V V= + [-] (3.9.C)
L’analisi di tali curve indica la predisposizione del profilo sia a generare portanza, sia a cavitare sul dorso.
3.10 – I profili per timoni navali
I profili di più largo uso in campo navale sono quelli convessi, che presentano l’indiscutibile vantaggio di avere una geometria meno elaborata e di essere quindi di più facile ed economica costruzione. Va considerato inoltre che uno spessore più elevato lungo la coda conferisce anche maggiore robustezza alla pala. Tra questi sono di largo utilizzo i profili simmetrici delle famiglie NACA–00 e NACA–643.
Per quanto riguarda i profili concavo–convessi, esistono essenzialmente due tipologie denominate IfS e HSVA:
• i profili delle famiglie IfS–58, IfS–61 ed IfS–62 sono profili molto spinti e, fra quelli commerciali, presentano le più alte curve di portanza e la minore efficienza;
92
Cap.3 – Il progetto del timone
• i profili HSVA delle famiglie MP–71 ed MP–73 sono profili che hanno caratteristiche idrodinamiche intermedie fra quelle dei profili NACA e quelle dei profili IfS, essi costituiscono perciò un buon compromesso fra le esigenze del governo e quelle della propulsione.
Nella pratica, si usano profili diversi dai NACA–00 quando è necessaria una maggiore portanza specifica cL. Quando invece c’è rischio di cavitazione si utilizzano in genere profili con lo spessore massimo spostato verso poppa (NACA–643 oppure i tipi HSVA se si desiderano portanze maggiori). Rimane comunque valido come principio di base che, se la portanza specifica della pala non è oggetto di particolare attenzione, la scelta deve cadere sui profili che hanno il rendimento idrodinamico migliore, oppure al limite sulla superficie di più economica costruzione, ossia la lastra piana (a meno di problemi strutturali).
Per quanto riguarda i profili con lo spessore massimo spostato verso poppa, va osservato che, da un lato la differente forma del campo di pressione sul dorso comporta un leggero spostamento verso poppa del centro di pressione, d’altro lato la posizione dell’asta di comando del timone è sempre posta in corrispondenza della sezione massima allo scopo di utilizzare profili più allungati e quindi a più alto rendimento. Perciò l’asta di comando viene a trovarsi a poppavia del centro di pressione, e ciò dà origine ad un timone instabile. Per questo motivo l’uso di timoni con la sezione massima spostata verso poppavia deve essere attentamente valutato.
Di tutti questi profili sono disponibili le leggi di distribuzione di spessore ed i valori dei coefficienti idrodinamici.
Storicamente i profili NACA sono tra i primi ad essere stati studiati, perciò esiste una consolidata esperienza ed una vasta documentazione. Anche per questo motivo essi si sono imposti nella pratica navale, perciò se lo scopo del progetto non è quello di cercare soluzioni innovative per affrontare problematiche particolari, essi rappresentano un ottimo compromesso sia per funzionalità sia per affidabilità.
Tra le diverse famiglie dei profili NACA, quella indicata con la sigla “00” costituisce usualmente la base per il progetto delle superfici di controllo. I profili di questa famiglia sono caratterizzati da un bordo di attacco arrotondato, una superficie convessa, una sezione massima al 30% della corda dal bordo di attacco e un bordo di uscita affilato o comunque molto sottile. Essi vengono identificati facendo seguire alla sigla della famiglia la sigla, formata da due numeri, indicante l’allungamento. Per questo motivo i profili NACA–00 sono indicati con un codice di quattro cifre (e sono denominati 4–digit) dove:
• la prima cifra indica il rapporto, moltiplicato per 100, tra la freccia massima f della linea media di distribuzione degli spessori e il valore
93
L’apparato di governo, manovra e stabilizzazione
della corda c, ma si osservi che tale cifra sarà “0”, trattandosi di profili che devono avere un comportamento simmetrico;
• la seconda cifra indica il rapporto, moltiplicato per 10, tra l’ascissa della freccia massima e il valore della corda c – come sopra, tale cifra sarà “0”;
• la terza e quarta indicano il rapporto, moltiplicato per 100, tra il valore dello spessore massimo t e quello della corda c.
A titolo d’esempio, la sigla completa NACA–0020 significa che la legge di distribuzione degli spessori è quella della famiglia di profili idrodinamici simmetrici NACA–00 con rapporto di forma t / c pari a 0,20.
In genere tali profili hanno allungamenti compresi fra 0,06 e 0,24 e le caratteristiche idrodinamiche sono spesso riferite alla seguente serie di valori
0,06 0,09 0,12 0,15 0,18 0,21 0,24. Tra questi i rapporti più bassi 0,06 e 0,09 configurano profili molto affusolati con comportamento di profilo sottile, i rapporti medi rappresentano il migliore compromesso tra portanza e rendimento, mentre i più elevati rapporti 0,21 e 0,24 hanno rendimenti bassi e vanno presi in considerazione solo se lo impongono le esigenze progettuali.
La legge di distribuzione degli spessori della famiglia NACA–00 è di tipo polinomiale e viene spesso fornita per punti con riferimento ad un profilo avente corda di lunghezza unitaria e semi–spessore massimo pari ad 1/10 della corda (ossia per un profilo NACA–0020), precisamente con y0 si indica il semi–spessore all’ascissa x0. L’espressione analitica polinomiale del profilo NACA–0020 avente corda unitaria è la seguente:
y0(x0) = 0,29690 x01/2 – 0,12600 x0 – 0,35160 x0
2 + 0,28430 x0
3 – 0,10150 x04 [N] (3.10.A)
Per ottenere poi la distribuzione degli spessori relativa ad una prefissata coppia di valori della corda c e dello spessore massimo t è sufficiente calcolare per similitudine le coppie (x, y) tramite le espressioni:
x = x0 c [m] (3.10.B)
y = y0 t / 0,20 [m] (3.10.C)
ed in particolare per lo spessore massimo vale y(x = 0,3 c) = t / 2.
Anche i profili NACA–643 possono trovare applicazioni in campo navale, si tratta di profili della Serie 6 (la prima cifra della sigla), aventi estensione del gradiente di pressione favorevole fino al 40% della corda (la seconda cifra della sigla esprime tale lunghezza in decimi della corda) ed alta efficienza entro cL = 0,3 (il pedice della sigla esprime tale valore moltiplicato per 10). Come i profili della serie 4–digit, al codice identificativo della famiglia seguono alcuni dati sulla freccia e sul rapporto di forma: per quelli
94
Cap.3 – Il progetto del timone
simmetrici, dopo uno “0” che indica il valore di cL per angolo di attacco nullo, viene riportato il rapporto, moltiplicato per 100, tra il valore dello spessore massimo t e quello della corda c (per esempio: NACA–643–018).
Le caratteristiche dei profili NACA sono state determinate tramite prove in galleria del vento effettuate su pale aventi allungamenti λ molto elevati. I dati sono stati poi raccolti, in funzione dell’allungamento λ, per diversi numeri di Reynolds e per condizioni standard della rugosità di superficie, fornendo essenzialmente le curve dei coefficienti idrodinamici di portanza e di resistenza e la posizione del centro di pressione al variare dell’angolo di attacco.
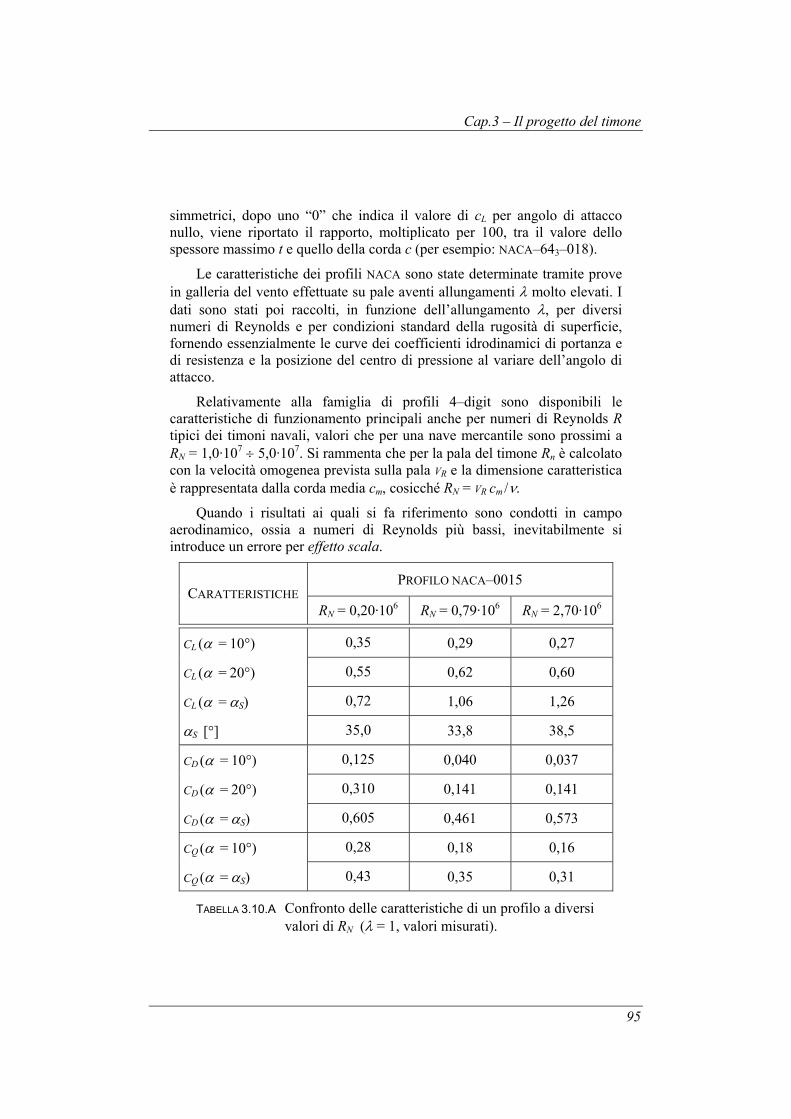
Relativamente alla famiglia di profili 4–digit sono disponibili le caratteristiche di funzionamento principali anche per numeri di Reynolds R tipici dei timoni navali, valori che per una nave mercantile sono prossimi a RN = 1,0·107 ÷ 5,0·107. Si rammenta che per la pala del timone Rn è calcolato con la velocità omogenea prevista sulla pala VR e la dimensione caratteristica è rappresentata dalla corda media cm, cosicché RN = VR cm / ν.
Quando i risultati ai quali si fa riferimento sono condotti in campo aerodinamico, ossia a numeri di Reynolds più bassi, inevitabilmente si introduce un errore per effetto scala.
PROFILO NACA–0015 CARATTERISTICHE
RN = 0,20·106 RN = 0,79·106 RN = 2,70·106
CL (α = 10°) 0,35 0,29 0,27
CL (α = 20°) 0,55 0,62 0,60
CL (α = αS) 0,72 1,06 1,26
αS [°] 35,0 33,8 38,5
CD (α = 10°) 0,125 0,040 0,037
CD (α = 20°) 0,310 0,141 0,141
CD (α = αS) 0,605 0,461 0,573
CQ (α = 10°) 0,28 0,18 0,16
CQ (α = αS) 0,43 0,35 0,31
TABELLA 3.10.A Confronto delle caratteristiche di un profilo a diversi valori di RN (λ = 1, valori misurati).
95
L’apparato di governo, manovra e stabilizzazione
Va osservato infatti che all’aumentare del Numero di Reynolds lo strato limite tende a passare da laminare a turbolento, con ciò favorendo l’attaccamento dello strato limite: conseguentemente si ha l’aumento dell’angolo di stallo, l’aumento della correlata portanza massima, la riduzione della resistenza di forma e quindi di quella totale, ed infine l’avvicinamento del centro di pressione al bordo d’attacco. Di conseguenza, gli esperimenti effettuati in campo aerodinamico forniscono in generale risultati conservativi per le applicazioni navali (si confrontino i valori di Tab.3.10.A). Va osservato infine che questi effetti, sicuramente rilevanti agli alti angoli d’incidenza, possono essere in prima approssimazione trascurati per piccoli e medi angoli.
Alla trattazione fin qui svolta vanno aggiunte alcune note, che riguardano i vincoli dimensionali cui deve sottostare la scelta del tipo di profilo allo scopo di consentire il collegamento della pala con l’asta di comando.
Si verifica infatti spesso che l’asta di comando del timone debba essere progettata con un diametro di innesto nella pala piuttosto elevato, a causa delle alte sollecitazioni cui è soggetta. Ciò comporta di per sé l’esigenza di prevedere una corda media piuttosto lunga per non far salire eccessivamente il valore del rapporto di forma del profilo. Ma tale via non è in genere praticabile a causa delle ristrette dimensioni della volta di poppa, e di conseguenza si deve accettare un fattore di forma del profilo piuttosto elevato, spesso anche superiore al valore limite di 0,24. In tali circostanze, è usuale considerare come limite il rapporto di forma di 0,25 e per valori superiori si ricorre, se non ad modifica sostanziale del progetto, almeno ad uno dei due seguenti accorgimenti: la scelta di un materiale più resistente per l’asta, oppure l’esecuzione di un accoppiatoio – tra l’asta e la pala – non perfettamente avviato con il mantello (ringrosso).
In secondo luogo, è noto che per aumentare l’economicità di esercizio bisogna minimizzare il valore del momento torcente di controllo, ed a tale scopo si cerca di posizionare l’asse di rotazione in corrispondenza del centro di pressione delle forze idrodinamiche. In generale il centro di pressione si trova in vicinanza del bordo di attacco, perciò è conveniente che il profilo sia scelto fra quelli che hanno lo spessore massimo in quella zona.
Sulla base di queste considerazioni, il profilo idrodinamico per la pala di un timone navale dovrà essere progettato in modo che:
• il rapporto di forma sia il più basso possibile, compatibilmente con il diametro dell’asta, per avere una migliore efficienza. Si osservi inoltre che, visto il diametro dell’asta e le luci generalmente a disposizione nella volta di poppa, il minimo valore applicabile del rapporto t/c
96
Cap.3 – Il progetto del timone
corrisponde generalmente a profili spessi (di solito non si corre il rischio di usare profili sottili);
• lo spessore massimo sia in corrispondenza del centro di pressione, quindi vicino al bordo di attacco, allo scopo di posizionare l’asta il più vicino possibile al centro di pressione per minimizzare il momento torcente di controllo.
Inoltre va tenuto presente che le navi destinate a lunghe rotte e a limitate manovre in acque ristrette devono avere timoni con alti valori del gradiente di portanza (∂cL / ∂α elevato) ai bassi angoli di barra, ossia a quegli angoli utili per il controllo della rotta, mentre navi per servizi su brevi rotte e soggette a frequenti manovre in acque ristrette devono essere molto manovrabili e quindi devono avere timoni ad elevate prestazioni (portanza massima elevata, e quindi generalmente cL massimo elevato).
3.11 – La superficie idrodinamica a sviluppo costante
I risultati dello studio del profilo idrodinamico in campo bidimensionale possono essere utilizzati per valutare il comportamento di una superficie idrodinamica ideale generata dalla traslazione all’infinito di un profilo a sezione costante lungo una direzione ortogonale rispetto al piano che lo contiene.
La superficie idrodinamica reale si differenzia dalla superficie ideale per una serie di caratteristiche geometriche, si può pensare infatti alla pala reale come una pala ideale sulla quale siano state effettuate le seguenti trasformazioni:
• la limitazione della campata, introducendo un allungamento finito; • la variazione della lunghezza della corda del profilo lungo la campata,
definendo quindi una rastremazione; • l’introduzione di un angolo di abbattimento, definendo una certa
inclinazione dei bordi di entrata e di uscita rispetto all’asse di rotazione. La superficie idrodinamica che costituisce il timone navale è quindi caratterizzata essenzialmente dall’allungamento finito e dalla forma della sua area proiettata sul piano diametrale, ossia dal suo sviluppo planare. Si osservi che in genere le pale hanno, lungo la campata, un profilo ad allungamento costante, per motivi sia idrodinamici (riduzione degli effetti trasversali del flusso) sia costruttivi (economicità di realizzazione di superfici a generazione rettilinea). E’ perciò evidente che il flusso sulla superficie della pala risulterà diverso da quello bidimensionale illustrato a proposito dei profili idrodinamici, che si realizza solamente per allungamenti infiniti. Tale flusso tridimensionale dipenderà proprio dalla morfologia della pala.
97
L’apparato di governo, manovra e stabilizzazione
Nell’analisi del comportamento della pala reale è conveniente valutare separatamente gli effetti di tali modifiche, partendo da quella più importante per il funzionamento della pala. Si consideri perciò in un primo momento una pala con allungamento finito e sezione costante, ossia con sviluppo planare rettangolare.
L’allungamento finito della pala comporta il contatto fra il campo in depressione dinamica sul dorso e quello in pressione sul ventre. Come conseguenza nasce lungo la campata un flusso che, combinandosi con la corrente di trasporto, dà origine, ad ogni estremità della pala, ad un vortice il cui nocciolo è localizzato proprio sulle estremità. Il campo di velocità complessivo può essere studiato come la somma di un campo bidimensionale indisturbato e di un campo formato dalla presenza dei due vortici di estremità, il cosiddetto campo di velocità indotto. Quest’ultimo campo può essere visualizzato osservando ciò che succede su un piano ortogonale al flusso che lambisce la pala: si vedrà così che si viene a creare una corrente vorticale sul piano normale al flusso indisturbato, detta corrente indotta, con valori della velocità che variano spostandosi dal centro della campata verso il nocciolo del vortice. Questa corrente manifesta una componente cosiddetta discendente che matura lungo la campata della pala, ed una ascendente che si instaura al di là delle estremità della pala. La corrente discendente comporta una deviazione del flusso che incide sulla pala, determinando un angolo di attacco minore di quello ideale.
La velocità discendente ha un andamento variabile lungo la campata, con legge che dipende dalle caratteristiche morfologiche della pala. Inoltre tale variazione si manifesta in maniera diversa su pale che hanno sviluppi planari diversi.
Questo flusso non è localizzato sulle estremità ma influenza il campo di velocità sull’intera superficie della pala, rendendolo tridimensionale. Il fenomeno è tanto più accentuato quanto minore è l’allungamento effettivo λ della pala.
L’influenza dell’allungamento sulla resistenza ha origine nell’energia persa per la generazione dei vortici di estremità, mentre l’influenza sulla portanza va ricercata nella diversa orientazione del vettore di velocità del flusso in corrispondenza della pala. Per tenere conto di questo effetto è usuale riferirsi alla distribuzione delle velocità indotte vI [m/s] lungo la campata, oppure in maniera equivalente a quella degli angoli indotti αI [°] intesi come variazione rispetto all’angolo di attacco ideale α. Per quanto la pala si comporta perciò come una pala ideale soggetta ad un flusso con angolo di attacco effettivo α – αI ( x), dove l’ascissa x identifica la posizione della singola corda.
98
Cap.3 – Il progetto del timone
L’effetto complessivo di questi fenomeni consiste nella riduzione del gradiente di portanza e nell’aumento della resistenza. La riduzione della portanza e l’aumento della resistenza comportano complessivamente un peggioramento del rendimento della superficie idrodinamica. Tutto ciò si verifica senza una sostanziale modifica del valore della portanza all’angolo di stallo, infatti il valore massimo della portanza non risente sostanzialmente della modifica dell’allungamento. Si osservi a tale riguardo che la portanza massima è precipuamente dipendente dal valore del Numero di Reynolds del fenomeno idrodinamico.
Le curve di portanza si abbattono tanto più quanto più l’allungamento si riduce, e di conseguenza, mantenendosi costante il valore massimo, l’angolo di stallo aumenta. In pratica la stessa portanza si realizza, al diminuire dell’allungamento, ad angoli d’attacco sempre maggiori. È importante notare che la riduzione del gradiente di portanza dipende quasi esclusivamente dall’allungamento della pala, mentre la forma del profilo idrodinamico è ininfluente
Ogni sezione della pala rettangolare vede quindi una velocità discendente variabile in funzione della posizione lungo la campata, e tanto maggiore quanto più ci si avvicina all’estremità. Inoltre una pala con basso allungamento risente di tale effetto su una superficie percentualmente maggiore rispetto ad una con allungamento più elevato: un allungamento ridotto può disturbare il campo di velocità su tutta la lunghezza della campata. Di conseguenza è preferibile avere una pala il più possibile allungata, compatibilmente con la luce verticale a disposizione per il timone nella volta di poppa.
Un contributo alla riduzione delle perdite per cross flow è rappresentato dall’allungamento fittizio della pala, che si può ottenere avvicinando notevolmente il bordo superiore della stessa alla carena. Tale interazione va sotto il nome di effetto specchio perché, nel caso di flusso ideale, il contatto con una superficie piana normale all’asse di rotazione raddoppia l’allungamento geometrico. In realtà la superficie non è a contatto, non è normale all’asse di rotazione né tantomeno piana, perciò l’incremento dell’allungamento è limitato e diventa funzione dell’angolo di barra del timone.
L’allungamento fittizio può essere aumentato anche agendo sul bordo inferiore. Un intervento per ridurre gli effetti di estremità all’apice consiste nell’aggiunta di una lamina terminale parallela al fondo e tale da fuoriuscire dalla forma stessa del profilo. In alternativa, e più usualmente, l’apice della pala viene tagliato di netto: rispetto al caso di apice sagomato permette di avere una portanza maggiore, anche se a scapito di una maggiore resistenza indotta.
99
L’apparato di governo, manovra e stabilizzazione
3.12 – Lo sviluppo planare
Si consideri ora la pala di un timone: essa mostra uno sviluppo planare caratterizzato da una certa legge di variazione della lunghezza della corda lungo la campata e da un angolo di abbattimento. Tali caratteristiche geometriche verranno di seguito analizzate per valutare il loro impatto sulla generazione delle forze idrodinamiche.
Dal momento che, nel caso in esame, la pala non lavora generalmente con una distribuzione omogenea della portanza e della resistenza, l’interazione fra pala e flusso deve ora essere analizzata introducendo delle grandezze idrodinamiche che, variando lungo la campata, forniscano informazioni sulle modalità di lavoro delle singole sezioni. Si definiscono a tale scopo, in aggiunta ai coefficienti idrodinamici relativi all’intera superficie della pala, i coefficienti di portanza e di resistenza locali, relativi alle singole sezioni trasversali. Tali coefficienti fanno riferimento alle densità lineari di portanza e di resistenza lungo la campata.
Il più usato è quello relativo alla portanza, che viene definito sulla base della densità lineare di portanza l(x) [N/m], ove l’asse Ox è steso nella direzione della campata. Per una generica pala a corda variabile c(x), l’area proiettata del tratto δx (centrato sull’ascissa x) vale δAR = c(x)δx e la portanza da essa sviluppata si può scrivere, in funzione della densità di portanza l(x), come δL = l(x)δx. Dalla relazione appena scritta si può osservare che la portanza della pala corrisponde all’integrale della densità l(x) esteso all’intera campata:
( )0
db
L l x= ∫ x [N] (3.12.A)
in cui b è palesemente la lunghezza della campata della pala.
In analogia alla definizione del coefficiente di portanza cL relativo alla superficie complessiva della pala, si definisce anche il coefficiente di densità di portanza χL:
( ) ( )( )L
l xx
qc xχ = [-] (3.12.B)
il quale caratterizza localmente il comportamento della pala assumendo un valore diverso su ogni corda. Perciò il coefficiente di pala cL può essere espresso come:
( ) ( )0
1 db
LR
c c x xA
χ= ∫ x [N] (3.12.C)
100
Cap.3 – Il progetto del timone
La forma della pala comporta una diversa distribuzione della velocità discendente, e quindi differenti distribuzioni di portanza, con modifiche del rendimento e dell’angolo di stallo. Per impostare un’analisi qualitativa dell’influenza della forma sulle caratteristiche idrodinamiche, può essere utile il confronto fra superfici idrodinamiche rettangolari e triangolari, morfologie che rappresentano i due limiti estremi delle pale dei timoni. Tali analisi verranno condotte su pale simmetriche lungo la campata, ovvero addossate ad una estremità ad una superficie che crea l’effetto specchio.
La pala rettangolare mostra una distribuzione di corrente discendente con valori massimi alle estremità, e quindi in tali zone il coefficiente di densità di portanza è minore – si rammenta che esso rappresenta la capacità del profilo, posto ad una determinata ascissa della pala, di generare portanza indipendentemente dall’area ivi presente. Poiché la corda è costante, la densità di portanza l(x) ha la stessa distribuzione del coefficiente locale χL(x), con un andamento quasi piatto al centro e una forte variazione ai bordi dove praticamente si annulla, qui infatti la velocità discendente è tale da rendere vano l’effetto dell’angolo di attacco.
La pala triangolare mostra una distribuzione di corrente discendente con valori minimi alle estremità, conseguentemente la riduzione del coefficiente locale di portanza è più accentuata al centro della campata, mentre il profilo sui bordi tende a generare portanza come se fosse isolato poiché sui bordi la velocità discendente tende ad annullarsi. La densità di portanza della pala, per effetto dello sviluppo planare, è maggiore a centro campata. Si osservi che, in virtù della particolare configurazione, il flusso al centro della campata tende a mantenere quello alle estremità sulla direzione della corda, un po’ perché la formazione della corrente indotta è più graduale lungo la campata, ed un po’ per effetto del ritardo di ingaggio dovuto all’abbattimento del bordo di attacco.
Le due pale si comportano in maniera palesemente contrapposta per quanto riguarda la distribuzione del coefficiente locale di portanza: quella rettangolare registra valori più elevati alla radice e quella triangolare manifesta valori più elevati all’apice. Di conseguenza, la pala rettangolare mostra un inizio di stallo alla radice, quella triangolare al vertice. Esse non lavorano perciò sfruttando appieno le caratteristiche del profilo idrodinamico perché già a partire da angoli geometrici di attacco bassi (e tanto più bassi quanto minore è l’allungamento) alcune zone si scaricano. Anche la formazione di cavitazione, dipendendo dalle pressioni che sono strettamente correlate alla distribuzione del coefficiente locale di portanza, non è omogenea.
I due effetti di sbilanciamento del campo di pressione si compensano quando la pala ha sviluppo planare ellittico, definendo così la condizione ideale di lavoro dei singoli profili che la compongono.
101

L’apparato di governo, manovra e stabilizzazione
La pala che ha il comportamento migliore nei confronti della generazione delle forze idrodinamiche è infatti quella a superficie di forma ellittica con profilo ad allungamento costante (e bordi di attacco e di uscita del flusso simmetrici rispetto alla retta dei massimi spessori). Essa ha la caratteristica di generare lungo la campata una distribuzione costante della velocità discendente: ciò comporta che la distribuzione del coefficiente di portanza sia costante. Di conseguenza la densità di portanza ha distribuzione ellittica che, in funzione della portanza totale generata L può essere espressa dalla relazione:
( ) ( )24 1 2 /π
Ll x x bb
= − [N/m] (3.12.D)
Essendo l’andamento di χL costante, il flusso si mantiene omogeneo e la superficie entra in stallo con regolarità lungo la campata, mostrando linee di stallo, ai vari angoli, parallele tra loro e alla direzione della campata. Ciò si traduce, nel confronto con pale di morfologia diversa aventi la stessa portanza totale, in una resistenza indotta minore, un gradiente di portanza maggiore ed infine in una minore propensione alla cavitazione.
L’effetto della forma è perciò molto importante perché modifica fortemente le condizioni di lavoro di una superficie ad allungamento finito, perciò la pala del timone deve avere uno sviluppo planare il più possibile simile a quello ellittico.
Un’altra caratteristica importante nella definizione della morfologia di pala è l’angolo di freccia (o angolo di abbattimento), che gioca un ruolo significativo nel modificare la distribuzione della portanza e lo schema di stallo. Tale grandezza infatti è responsabile del ritardo con cui il filetto fluido avverte la presenza della pala e concorre perciò a modificare la corrente indotta della particella fluida. Si verifica infatti sperimentalmente che un angolo di freccia elevato (abbattimento all’indietro) fa si che la pala si comporti come se fosse più rastremata – perciò la pala abbattuta all’indietro ha la tendenza a caricarsi di più all’apice. L’opposto si verifica quando l’angolo di freccia è ridotto, al limite negativo: esso conferisce alla pala un comportamento simile a quello di una superficie meno rastremata.
Per guidare la scelta del valore ottimale dell’angolo di abbattimento una volta fissato il valore del rapporto di rastremazione, si può fare riferimento alle risultanze sperimentali di studi condotti su pale aventi una distribuzione ellittica delle pressioni e, poiché le pale rastremate a spigoli diritti hanno una distribuzione della portanza pressoché ellittica, è usuale applicare anche ad esse tali considerazioni.
La correlazione esistente fra il rapporto di rastremazione e l’angolo di
freccia è tale da far corrispondere angoli decrescenti a rapporti di
102

Cap.3 – Il progetto del timone
rastremazione crescenti. I valori ottimali di dette coppie sono riportati in Tab.3.12.A, nella quale compaiono anche i valori dei corrispondenti angoli di freccia al bordo di attacco ΛLE calcolati, con riferimento a pale a spigoli rettilinei, per diversi valori di allungamento (i valori negativi non sono indicati perché non si prestano alla definizione dello sviluppo planare del timone).
rapporto di rastremazione ct / cr 0,40 0,45 0,50 0,60
angolo ottimale di abbattimento Λ 3,0° 0,0° –3,0° –7,5°
λ = 1,0 15,0° 11,0° 6,5° 0,0°
λ = 1,5 11,0° 7,0° 3,5° –
λ = 2,0 9,0° 5,5° 2,0° –
corrispondente freccia del bordo di attacco ΛLE per diversi valori di allungamento λ
λ = 2,5 8,0° 4,5° 1,0° –
TABELLA 3.12.A Relazione ottimale fra abbattimento e rastremazione e corrispondenti valori di freccia al bordo di attacco.
Si osservi che per rapporti di rastremazione superiori a 0,60 l’angolo di freccia al bordo di attacco diventa negativo e quindi il bordo di attacco non si adatta più a costituire il profilo di prora del timone. Infatti, considerazioni pratiche suggeriscono l’opportunità di avere un bordo d’attacco abbattuto all’indietro per evitare che la pala agganci e trattenga contro lo scafo corpi esterni trasportati dal flusso incidente.
Un rapporto di rastremazione elevato comporta inoltre il rischio di avere un centro di pressione troppo spostato in avanti e quindi di avere un timone instabile, d’altro lato un rapporto di rastremazione basso comporta valori troppo elevati dell’angolo di freccia e quindi sia momenti torcenti elevati a causa della posizione arretrata del centro di pressione, sia una struttura sbilanciata in cui i diaframmi verticali principali non siano allineati all’asta di controllo. Per questo motivi è usuale, nella scelta dello sviluppo planare dei timoni navali, riferirsi ad un rapporto di rastremazione pari a 0,45 e corrispondentemente ad un angolo di abbattimento nullo.
3.13 – La scelta della forma della pala
Gli studi finora citati sono riferibili a pale con distribuzione ellittica delle pressioni in presenza dell’effetto specchio su una estremità. L’effetto specchio però si è già annullato per una distanza della pala dalla volta di
103
L’apparato di governo, manovra e stabilizzazione
poppa uguale ad almeno 0,075 bS (si veda a riguardo la Tab.3.4.B). Per questo motivo le considerazioni precedentemente esposte devono considerarsi valide, almeno qualitativamente, per pale sufficientemente vicine alla volta di poppa. Vale la pena rimarcare che in tali circostanze un buon progetto deve considerare le seguenti osservazioni:
• l’allungamento deve essere il più elevato possibile; • lo sviluppo planare ottimale è quello ellittico, perciò le pale a spigoli
rettilinei che lo approssimano devono essere rastremate e con profili aventi rapporto di forma costante;
• la rastremazione migliore è, almeno indicativamente, quella che si associa all’angolo di abbattimento nullo.
Quando poi la pala si trova ad una distanza dalla volta di poppa superiore al valore limite sopra riportato, essa non risente più di un seppur parziale effetto specchio. In questo caso la configurazione ottimale per lo sviluppo planare è quella di pala rettangolare: questa geometria è infatti l’unica che presenta una simmetria rispetto alla corda media, tale da far assomigliare la pala il più possibile a quella ideale. Inoltre, studi effettuati su pale isolate, aventi allungamenti tipici dei timoni navali (λ < 3), mostrano che la distribuzione della portanza tende a rimanere praticamente invariata passando da una pala rettangolare ad una con rapporto di rastremazione pari a 0,5. Ciò giustifica ulteriormente la scelta, per le pale lontane dallo scafo, di una forma semplice come quella rettangolare.
Quanto esposto finora si riferisce a pale aventi profili con rapporto di forma costante, soluzione che rappresenta la quasi totalità dei casi. Talvolta però il rapporto può essere variabile a tratti, allo scopo di poter alloggiare l’asta nella parte superiore più spessa, mentre nella parte bassa viene mantenuto un profilo più efficiente.
I dati idrodinamici dei diversi tipi di pala sono disponibili per diverse morfologie e sono direttamente applicabili a timoni caratterizzati dalla stessa forma che lavorano in campi fluidi omogenei. Talvolta i dati idrodinamici di pala vengono forniti anche per flusso da poppa: in tal caso il centro di pressione risulta così lontano dall’asse di rotazione che, anche se le forze idrodinamiche si riducono, il momento torcente all’asta può risultare più elevato di quello in marcia avanti e quindi pericoloso. È anche possibile rintracciare le curve dei coefficienti idrodinamici relativi al funzionamento di pale che sfruttano l’effetto di vicinanza della volta di poppa, ma è più usuale riferirsi a dati per pale isolate ed effettuare correzioni a posteriori.
3.14 – L’utilizzo dei coefficienti idrodinamici di profilo
Quando non si dispone delle caratteristiche della pala, non rimane altra soluzione che fare riferimento ai dati idrodinamici dei profili in regime di
104
Cap.3 – Il progetto del timone
flusso bidimensionale. Essi possono essere infatti trasformati e applicati con buona approssimazione a pale rettangolari con allungamento finito e, in mancanza di dati più precisi, anche a pale rastremate.
La trasformazione dei dati idrodinamici da allungamento infinito a finito viene fatta sulla base della teoria elaborata nel 1920 da Prandtl per pale aventi distribuzione ellittica della portanza. Poiché tale condizione generalmente non sussiste, i coefficienti che compaiono nelle formule di trasformazione sono stati leggermente modificati da Schönherr per adeguarli a pale rettangolari.
Come già accennato, la curva del coefficiente di portanza cL(α) per pale ad allungamento finito è tanto più inclinata quanto più l’allungamento si riduce: al diminuire dell’allungamento l’angolo di stallo cresce mentre il valore massimo della portanza rimane praticamente invariato. Per valutare la curva di portanza di una pala avendo a disposizione quella del profilo (ossia della pala con allungamento infinito), si deve effettuare una trasformazione che consiste nell’abbattere la curva. In pratica, ogni valore del coefficiente di portanza cL(α) viene riferito ad un nuovo angolo di attacco αλ, ottenuto sommando ad α una quantità ∆α linearmente proporzionale al valore del coefficiente di portanza cL(α):
αλ = α + ∆α = α + kλ cL(α) [°] (3.14.A)
ove kλ è espresso in gradi. Si ottiene in questo modo una nuova curva del coefficiente di portanza per l’allungamento λ, costituita dalle coppie di valori [cL(α),αλ].
La curva del coefficiente di resistenza per allungamento infinito cD(α) viene modificata sommando ad ogni valore del coefficiente di resistenza cD(α) una quantità proporzionale al quadrato del coefficiente di portanza, e diagrammando i valori così ottenuti in funzione dell’angolo di attacco modificato αλ:
cD(α)λ = cD(α) + mλ [cL(α)]2 [-] (3.14.B)
dove mλ è un fattore adimensionale. Si ottiene così una nuova curva del coefficiente cD per l’allungamento λ, formata dalle coppie [cD(α)λ,αλ].
Nessuna ipotesi viene fatta per quanto riguarda la posizione del centro di pressione, che viene riportato senza modifiche al nuovo angolo di attacco modificato αλ. Si ottiene in questo modo una nuova curva del coefficiente (CPC /c)(α) per l’allungamento λ, formata dalle coppie [(CPC /c)(α),αλ]. Si osservi che se non è nota la coordinata CPS è necessario ipotizzare la posizione verticale del centro di pressione prima di passare a definire il grado di compenso della pala.
105

L’apparato di governo, manovra e stabilizzazione
Tali formule permettono anche il passaggio da un allungamento finito ad un altro: è sufficiente infatti esprimere le formule di trasformazione per due diversi allungamenti ed eliminare i parametri comuni α e cD(α). Eseguendo queste operazioni mettendo in relazione gli allungamenti λ1 e λ2 si ottengono le relazioni:
αλ1 – αλ2 = (kλ1 – kλ2) cL(α) [°] (3.14.C)
cD(α)λ1 – cD(α)λ2 = (mλ1 – mλ2) [cL(α)]2 [-] (3.14.D)
I fattori kλ ed mλ per le pale d’uso navale a spigoli diritti sono tabulati in funzione dell’allungamento effettivo λ (si veda la Tab.3.14.A).
allungamento λ 0,5 1,0 1,5 2,0 4,0 6,0
fattore kλ [°] 37,20 19,05 12,92 9,85 5,17 3,58
fattore mλ [-] 0,632 0,318 0,213 0,161 0,082 0,056
TABELLA 3.14.A Fattori di correzione per l’allungamento.
I fattori kλ ed mλ relativi a pale con distribuzione ellittica della portanza sono esprimibili analiticamente. Se il fattore kλ viene espresso in radianti, per le pale a distribuzione ellittica della portanza vale:
1π
k mλ λ λ= = [-] (3.14.E)
ed i valori così ottenuti possono essere utilizzati in sostituzione di quelli tabulati.
Come ultima risorsa, se non si dispone delle caratteristiche dei profili, esistono formule analitiche semi–empiriche che, legando i coefficienti idrodinamici all’allungamento e all’angolo di attacco, trascurano l’effetto della forma sia della pala che del profilo, oltre che l’effetto del Numero di Reynolds.
Un esempio di formulazione adatta a determinare con buona accuratezza le caratteristiche idrodinamiche di profili classici è la seguente, in cui i valori approssimati di cL, cD e cQ (quest’ultimo calcolato rispetto al bordo di attacco) sono forniti per angoli di attacco “piccoli” rispetto all’angolo di stallo:
( )( )1 2 2
2π 1sin sin sin cos
2L L Lc c c
λ λα α α
λ
+= + = +
+α [-] (3.14.F)
106

Cap.3 – Il progetto del timone
( )
23
1 2 3 2
0,0751,1 sin 2,5π log 2
LD D D D
N
cc c c cR
αλ
= + + = + +−
[-] (3.14.G)
( ) ( )( )
1 1
2 2
2cos sin 0,474 1
0,75 cos sin
Q L D
L D
c c c
c c
λα αλ
α α
+= − + − + +
− +
[-] (3.14.H)
Queste espressioni devono essere poi completate con i dati relativi all’angolo di stallo.
È molto interessante osservare infine che pale con profili convenzionali, se il loro allungamento è troppo basso (λ < 1,0), possono non riuscire ad esprimere la portanza massima del profilo, a causa dell’abbattimento della curva di portanza, entro il valore limite rappresentato dal massimo angolo di barra del timone. D’altra parte va sempre verificato che il massimo angolo di barra previsto per il timone non sia superiore all’angolo di stallo.
Anche per la pala rettangolare costituita da una lastra piana si può fare riferimento a formulazioni semi–empiriche.
Vanno ricordati, a riguardo, i risultati delle prove al vero condotte sulla Loira da Joessel nel 1873: questi misurò la forza idrodinamica che nasce su una lastra piana al variare dell’angolo di attacco α e dell’intensità della corrente. La formula che propose mette in luce la dipendenza della forza d’interazione idrodinamica dal quadrato della velocità e dall’area della superficie, d’altro lato non considera altri fattori importanti come l’allungamento della pala.
In pratica Joessel fece variare, a parità di angolo di attacco e di velocità, la posizione dell’asse di rotazione (facendole assumere i due valori d1 e d2) e misurò i momenti di controllo Q1 e Q2 nelle due configurazioni: ciò gli permise di pervenire al valore della forza FN ed a quello della distanza CPC del centro di pressione dal bordo di ingresso. Infatti, da ogni coppia di prove ottenne due relazioni con due soli dati incogniti (FN e CPC), quelli ricercati, due parametri noti (d1 e d2) e due grandezze misurate (Q1 e Q2):
( )( )
1 1
2 2
N C
N C
F d CP Q
F d CP Q
− =
− = [-] (3.14.I)
Egli espresse i risultati degli esprimenti in termini di coefficiente adimensionale cN fornendo infine la relazione:
0,811sin0,195 0,305 sinNc α
α=
+ [-] (3.14.J)
107
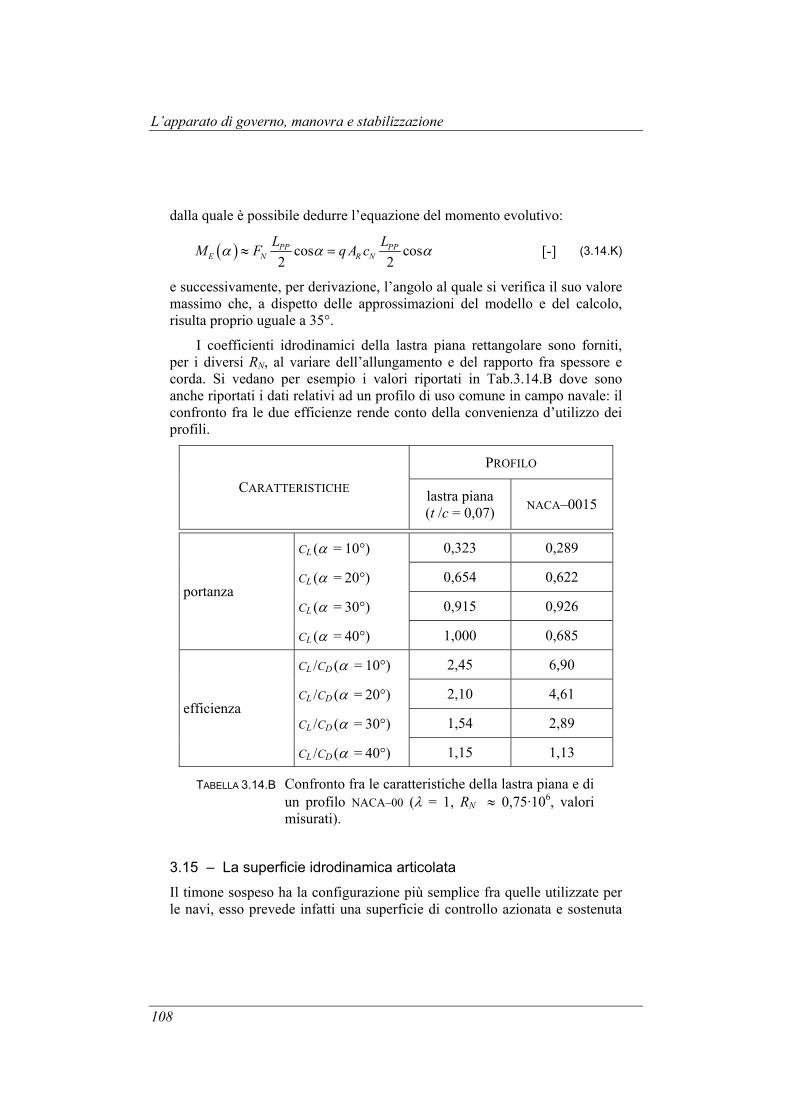
L’apparato di governo, manovra e stabilizzazione
dalla quale è possibile dedurre l’equazione del momento evolutivo:
( ) cos cos2 2PP PP
E N R NL LM F q A cα α α≈ = [-] (3.14.K)
e successivamente, per derivazione, l’angolo al quale si verifica il suo valore massimo che, a dispetto delle approssimazioni del modello e del calcolo, risulta proprio uguale a 35°.
I coefficienti idrodinamici della lastra piana rettangolare sono forniti, per i diversi RN, al variare dell’allungamento e del rapporto fra spessore e corda. Si vedano per esempio i valori riportati in Tab.3.14.B dove sono anche riportati i dati relativi ad un profilo di uso comune in campo navale: il confronto fra le due efficienze rende conto della convenienza d’utilizzo dei profili.
PROFILO
CARATTERISTICHE lastra piana (t /c = 0,07) NACA–0015
CL (α = 10°) 0,323 0,289
CL (α = 20°) 0,654 0,622
CL (α = 30°) 0,915 0,926 portanza
CL (α = 40°) 1,000 0,685
CL /CD (α = 10°) 2,45 6,90
CL /CD (α = 20°) 2,10 4,61
CL /CD (α = 30°) 1,54 2,89 efficienza
CL /CD (α = 40°) 1,15 1,13
TABELLA 3.14.B Confronto fra le caratteristiche della lastra piana e di un profilo NACA–00 (λ = 1, RN ≈ 0,75·106, valori misurati).
3.15 – La superficie idrodinamica articolata
Il timone sospeso ha la configurazione più semplice fra quelle utilizzate per le navi, esso prevede infatti una superficie di controllo azionata e sostenuta
108
Cap.3 – Il progetto del timone
da un’asta disposta verticalmente, collegata alla pala per mezzo di un accoppiatoio contenuto generalmente entro i mantelli.
In alternativa, la pala viene sostenuta anche da strutture che fuoriescono dallo scafo, poste in corrispondenza del bordo di attacco nella parte alta o in prossimità del bordo inferiore: in questo modo l’asta viene sgravata di parte del carico trasmesso dalla pala (in particolare diminuisce il momento flettente sull’asta). Quando la struttura di supporto della pala si estende in maniera parziale lungo il bordo di attacco il timone viene detto su corno, quando invece la struttura di supporto corre dallo spigolo superiore a quello inferiore della pala il timone è detto su pinna.
Le strutture di supporto poste lungo il bordo di attacco modificano anche significativamente le caratteristiche idrodinamiche della pala, partecipando alla generazione delle forze di portanza e di resistenza. Per questo motivo tali supporti vengono sagomati in modo da assumere una forma idrodinamica, possibilmente ben avviata con la pala allo scopo di costituire un unico corpo idrodinamico senza discontinuità o interstizi fra le parti.
In alcune configurazioni si usa un sostegno inferiore, detto calcagnolo, costituito da una struttura ottenuta dal prolungamento della chiglia. Il calcagnolo non costituisce un ingombro per il flusso incidente sulla pala e quindi non richiede particolari sagomature.
Dal punto di vista idrodinamico si distinguono perciò i timoni a superficie completamente mobile da quelli dietro superficie fissa, ovvero con sostegno lungo il bordo di attacco.
In generale, la presenza di una superficie fissa avviata a prora del timone deve essere tenuta in considerazione nel calcolo delle caratteristiche della pala, perciò una pinna o un corno devono essere considerati a tutti gli effetti come facenti parte della pala. Concorrendo a determinarne tutte le caratteristiche morfologiche, essi devono essere conteggiati nel calcolo della lunghezza media della corda e della campata, del rapporto t/c, dell’area totale, dell’allungamento, della rastremazione e dell’angolo di abbattimento.
D’altro lato, dal punto di vista costruttivo si parla di timoni sospesi, su pinna, su corno o su calcagnolo.
È bene notare che il progetto strutturale e quello idrodinamico sono strettamente connessi, infatti una pala senza strutture aggiuntive di sostegno richiede un’asta di controllo e supporto più robusta perché soggetta, oltre che a carichi torsionali (immediata conseguenza dell’azione di controllo) anche a carichi flessionali. La presenza di strutture di sostegno sgrava parzialmente l’asta dalle azioni flessionali, permettendo così un dimensionamento più leggero della stessa.
109
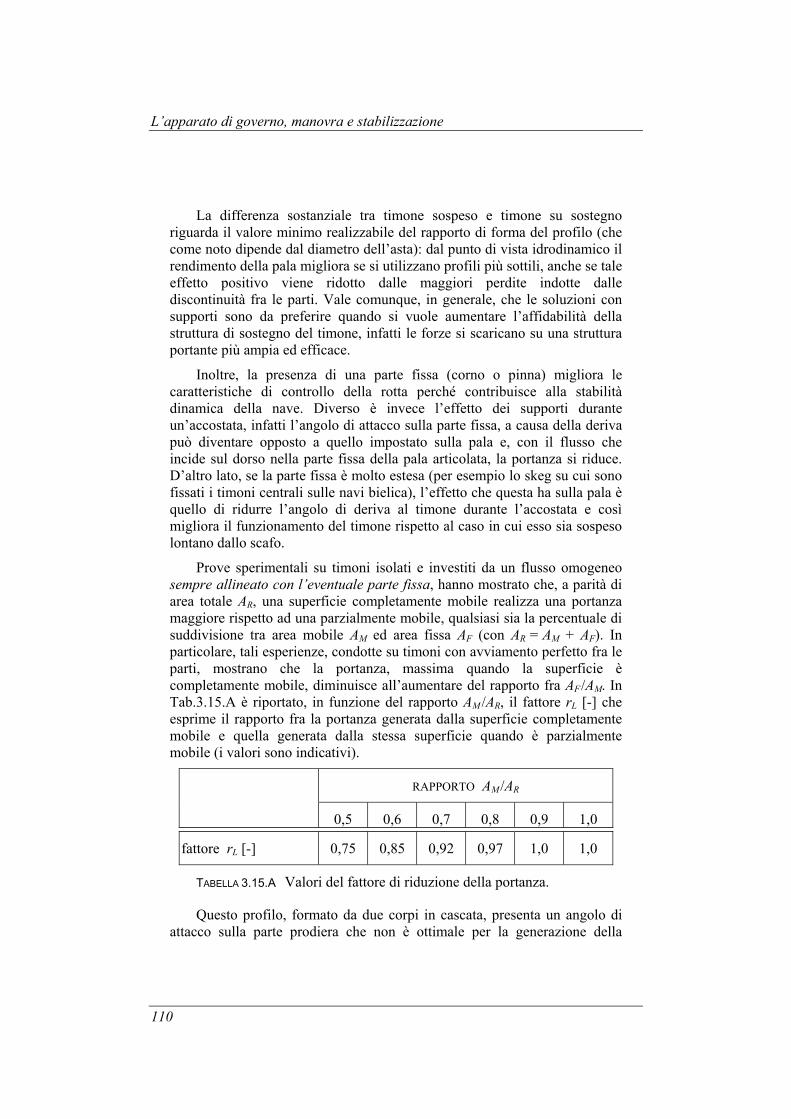
L’apparato di governo, manovra e stabilizzazione
La differenza sostanziale tra timone sospeso e timone su sostegno riguarda il valore minimo realizzabile del rapporto di forma del profilo (che come noto dipende dal diametro dell’asta): dal punto di vista idrodinamico il rendimento della pala migliora se si utilizzano profili più sottili, anche se tale effetto positivo viene ridotto dalle maggiori perdite indotte dalle discontinuità fra le parti. Vale comunque, in generale, che le soluzioni con supporti sono da preferire quando si vuole aumentare l’affidabilità della struttura di sostegno del timone, infatti le forze si scaricano su una struttura portante più ampia ed efficace.
Inoltre, la presenza di una parte fissa (corno o pinna) migliora le caratteristiche di controllo della rotta perché contribuisce alla stabilità dinamica della nave. Diverso è invece l’effetto dei supporti durante un’accostata, infatti l’angolo di attacco sulla parte fissa, a causa della deriva può diventare opposto a quello impostato sulla pala e, con il flusso che incide sul dorso nella parte fissa della pala articolata, la portanza si riduce. D’altro lato, se la parte fissa è molto estesa (per esempio lo skeg su cui sono fissati i timoni centrali sulle navi bielica), l’effetto che questa ha sulla pala è quello di ridurre l’angolo di deriva al timone durante l’accostata e così migliora il funzionamento del timone rispetto al caso in cui esso sia sospeso lontano dallo scafo.
Prove sperimentali su timoni isolati e investiti da un flusso omogeneo sempre allineato con l’eventuale parte fissa, hanno mostrato che, a parità di area totale AR, una superficie completamente mobile realizza una portanza maggiore rispetto ad una parzialmente mobile, qualsiasi sia la percentuale di suddivisione tra area mobile AM ed area fissa AF (con AR = AM + AF). In particolare, tali esperienze, condotte su timoni con avviamento perfetto fra le parti, mostrano che la portanza, massima quando la superficie è completamente mobile, diminuisce all’aumentare del rapporto fra AF /AM. In Tab.3.15.A è riportato, in funzione del rapporto AM /AR, il fattore rL [-] che esprime il rapporto fra la portanza generata dalla superficie completamente mobile e quella generata dalla stessa superficie quando è parzialmente mobile (i valori sono indicativi).
RAPPORTO AM /AR
0,5 0,6 0,7 0,8 0,9 1,0
fattore rL [-] 0,75 0,85 0,92 0,97 1,0 1,0
TABELLA 3.15.A Valori del fattore di riduzione della portanza.
Questo profilo, formato da due corpi in cascata, presenta un angolo di attacco sulla parte prodiera che non è ottimale per la generazione della
110
Cap.3 – Il progetto del timone
portanza perché, per un flusso proveniente nella direzione prora–poppa, è sempre nullo. Le cose poi non possono che peggiorare quando in accostata si è in presenza di un angolo di deriva. Come noto, l’effetto della deriva è quello di ridurre l’angolo di attacco sul timone, e ciò sulla parte fissa si traduce automaticamente in un angolo di attacco opposto rispetto a quello della pala.
A ciò si aggiunga che la resistenza indotta aumenta a causa delle zone di discontinuità, sia per effetto degli interstizi fra la pinna e la pala, sia per effetto dell’eventuale grado di compenso del timone, che crea un ulteriore disallineamento fra le parti. In realtà infatti tra dorso e ventre si crea un vaso di comunicazione, che è sempre più grande all’aumentare dell’angolo di barra, e di conseguenza si ha una riduzione dei campi di pressione idrodinamica.
Ma la presenza di una parte fissa davanti al timone non è di per sé un fatto negativo, infatti l’aggiunta di una parte fissa, avviata con continuità di fronte all’intero bordo di attacco, ha l’effetto di aumentare l’area della superficie complessiva di controllo. Prove sperimentali hanno mostrato che fra un timone di area AM completamente mobile e lo stesso timone di area AM preceduto da una pinna di area AF, quest’ultimo genera una portanza maggiore a fronte di una maggiore resistenza. In conclusione, una volta fissata l’area per esigenze evolutive, si può pensare di posizionare di fronte alla pala una pinna per migliorare sia la generazione della portanza, sia il controllo di rotta.
Un caso tipico è quello dei timoni fissati direttamente a carena su uno skeg, in cui la pala viene a funzionare come un flap dell’intera carena – ovviamente in queste configurazioni i timoni non possono sfruttare la scia dell’elica.
Un’alternativa più interessante è quella costituita dal timone su corno, preferibile sia perché, a parità di area totale AR la parte fissa è più piccola in quanto si estende per circa metà altezza della campata, sia perché la parte inferiore della pala non trova davanti a sé alcun ostacolo. A ciò si aggiunga che il corno è una struttura più tozza e robusta di una pinna e quindi è meno sollecitata (si pensi alla flessione indotta dalla pala) e più facile da realizzare.
Con la configurazione su corno si ottiene una maggiore portanza rispetto ad un timone di uguale area totale AR ma su pinna. Per quanto riguarda la resistenza, diversi sono i fenomeni che la determinano ed è difficile dire se essa aumenti o diminuisca: da un lato essa aumenta perché risente della presenza deleteria della zona di discontinuità alla base del corno, dall’altro essa si ricuce grazie alla diminuzione del disallineamento fra parte mobile e fissa sia per la minore estensione del supporto, sia per l’avvicinamento dell’asse di rotazione al bordo di attacco. Complessivamente il rendimento
111
L’apparato di governo, manovra e stabilizzazione
del timone su corno é migliore di quello su pinna, essendo la pinna più intrusiva sul funzionamento della pala.
Va osservato che l’asta può essere avvicinata al bordo di attacco della parte mobile nella zona alta, in quanto la compensazione è realizzata solamente nella parte inferiore: tali timoni si dicono per questo motivo timoni semi–compensati.
I timoni navali, se non sono sospesi, sono generalmente su corno, infatti tra le due configurazioni la seconda presenta i seguenti pregi:
• garantisce migliori doti di controllo della rotta, • consente di mantenere un favorevole rapporto di forma del profilo, • possiede una maggiore affidabilità strutturale,
seppure a scapito di un rendimento idrodinamico minore.
Le configurazioni su calcagnolo sono limitate a casi particolari in cui tra le finalità del progetto vi sia quella di creare un pozzo dell’elica chiuso, infatti il calcagnolo è di per sé un elemento strutturale delicato che per aggiunta si trova in una zona estremamente critica.
Poche sono le prove sperimentali disponibili sul comportamento dei timoni su corno. Fra esse si ricorda un interessante studio condotto da Goodrich e Molland su una serie di timoni su corno provati in galleria del vento in condizioni di flusso isolato.
Tali esperienze sono state effettuate su pale in scala, avvicinate ad una superficie piana in modo da simulare l’interazione del timone con la volta di poppa ed investite da un flusso avente un Numero di Reynolds di poco superiore ad 1⋅106 allo scopo di ridurre il più possibile l’effetto scala. Le tre configurazioni studiate sono tutte su corno con pale aventi caratteristiche geometriche identiche se non per quanto riguarda il rapporto di rastremazione.
Le prove sono state effettuate, per diversi angoli di deriva al corno (fino ad un massimo di ±15°), al variare dell’angolo di barra relativo al corno (con un intervallo costante di 2,5°). Le forze sono state misurate con celle di carico sia sull’asta di sostegno della pala, rendendo disponibili dati parziali per il contributo delle due superfici, quella fissa e quella mobile. In un secondo momento, allo scopo di poter confrontare tali contributi parziali, i coefficienti idrodinamici sono stati calcolati utilizzando come superficie quella totale (pala + corno).
Tra i risultati significativi delle prove si menzionano i seguenti: • la portanza generata complessivamente dal timone quando viene
aggiunto il corno aumenta, assieme alla resistenza, purché l’angolo di attacco sul corno (ossia l’angolo di deriva) si mantenga positivo, infatti
112
Cap.3 – Il progetto del timone
la presenza di un angolo di deriva negativo sul corno, come succede in accostata, fa diminuire la portanza;
• il centro di pressione risente della presenza del corno, spostandosi in avanti e verso l’alto quando viene considerata anche la parte fissa (inoltre il centro di pressione si muove molto al variare dell’angolo di barra);
• facendo ruotare il corno assieme alla pala si ottiene una portanza maggiore ed un rendimento maggiore rispetto al caso di pala mobile e corno fisso;
• la chiusura dei meati fra il dorso ed il ventre della pala fa aumentare il gradiente di crescita della portanza e fa diminuire la resistenza.
In generale è molto difficile avere a disposizione dati sulle caratteristiche idrodinamiche dei timoni semi–compensati, di conseguenza è spesso necessario ripiegare su metodi approssimati. Una via è quella di calcolare le caratteristiche idrodinamiche di un timone di area uguale e completamente mobile, salvo poi correggere con un fattore stimato rL la portanza generata dalla zona alta, che può essere percentualmente valutata ipotizzando una distribuzione lineare lungo la campata. Inoltre, nel progetto strutturale si può ricorrere all’assunzione conservativa di considerare la superficie idrodinamica come se fosse tutta mobile.
Per quanto riguarda la valutazione della posizione del centro di pressione CP del timone su corno o su pinna, in prima approssimazione si può supporre che essa corrisponda a quella del timone a superficie completamente mobile. Ciò comporta che il centro di pressione della sola parte mobile sia spostato a poppavia, e tale circostanza va tenuta in considerazione quando ci si appresta a definire il grado di compenso della pala – riferito ovviamente alla sola parte mobile.
In generale, un timone all movable ha un grado di compenso massimo compreso fra il 23 % ed il 30 %, in funzione del tipo di profilo e del grado di instabilità che si vuole accettare. Un timone su pinna o su corno ha generalmente un grado di compenso minore, compreso fra il 18 % ed il 24 %, per limitare il disallineamento fra parte fissa e parte mobile e, per timoni su corno, anche per esigenze di robustezza della parte inferiore della pala.
Quando il momento evolutivo generato da una pala non è sufficiente a conferire alla nave le qualità evolutive richieste, e contemporaneamente non è possibile aumentare la superficie della pala, l’unica soluzione è quella di ricercare un profilo con una portanza specifica superiore. Ciò conduce all’utilizzo di pale con flap di coda.
In tali configurazioni l’avviamento tra i due profili, quello principale e quello di coda, viene fatto con precisione e la pala si comporta quindi come se fosse formata da un unico profilo asimmetrico avente la freccia delle
113

L’apparato di governo, manovra e stabilizzazione
corda variabile, sul quale il flusso incide con un angolo di attacco non nullo già sul bordo di ingresso. Tale circostanza fa si che alla portanza generata per effetto dell’angolo di attacco si aggiunga il contributo della freccia del profilo e ciò assicura valori di portanza che possono essere il doppio di quelli di pale uguali ma a superficie non articolata. Va però osservato che anche la resistenza tende ad aumentare, comunque la scelta di un profilo con flap è in genere dettata da considerazioni di necessità e non dalla ricerca di un basso rendimento.
Le caratteristiche idrodinamiche del timone con flap dipendono dalla percentuale di superficie di flap ATF rispetto alla superficie mobile totale, e dal grado di compenso del flap. In ogni caso la portanza massima con flap è significativamente maggiore rispetto al caso di superficie completamente mobile: il massimo guadagno si ha con il rapporto ATF /AT = 0,20.
Il grado di compenso del flap viene generalmente mantenuto basso anche per non aumentare il disallineamento, mentre il grado di compenso totale sull’area AR raggiunge valori molto elevati (circa il 45%) poiché il centro di pressione totale si sposta verso poppavia per effetto della curvatura. Per questo motivo è conveniente che tali pale abbiano profili con massimo spessore spostato verso il centro della corda e che non siano presenti supporti fissi di fronte al bordo di attacco.
Le curve idrodinamiche per questo tipo di pala vengono diagrammate sia in funzione dell’angolo αTF di inclinazione del flap (angolo relativo al diametrale della pala), sia in funzione dell’angolo α di attacco del flusso sulla pala principale. Utilizzando uno dei due angoli come parametro si possono visualizzare le possibili condizioni di lavoro del timone ed è interessante al proposito analizzare l’andamento delle curve di portanza:
• la curva per α = 0 mostra la portanza ottenuta con la sola inclinazione del flap; essa è caratterizzata da un andamento simmetrico rispetto alla posizione al centro;
• la curva per αTF = 0 mostra la portanza ottenuta con l’inclinazione del flap in maniera solidale alla pala; essa è caratterizzata da un andamento simmetrico rispetto alla posizione al centro;
• le curve ottenute con il flap a diversi angoli di inclinazione sono asimmetriche e appaiono ottenute attraverso traslazioni proporzionali al valore dell’angolo αTF .
Infine, l’analisi delle curve di resistenza rende palese che la situazione di minima resistenza è quella che corrisponde alla situazione di flap solidale alla pala.
Appare perciò evidente che, definendo un’opportuna legge che leghi l’angolo del flap a quello di barra, legge del tipo αTF(α), si può ottenere una
114
Cap.3 – Il progetto del timone
curva di portanza che ottimizzi il comportamento del profilo in cascata, con un gradiente di crescita particolarmente alto fino allo stallo.
Proprio per sfruttare questa possibilità e considerando che il timone con flap a doppio comando richiede un meccanismo complesso e delicato, è stata ideata una variante nella quale il timone viene realizzato con un meccanismo piuttosto semplice che lega l’angolo relativo αTF tra il flap e la pala all’angolo di barra, in modo che il flap assuma un valore prestabilito per ogni angolo di barra impostato.
Si raggiunge così lo scopo di coniugare la semplicità del sistema di controllo, limitato all’asta principale, con elevate portanze specifiche, alto valore del gradiente di crescita della curva di portanza ed un angolo di stallo invariato. Questi timoni portano il nome dell’inventore e sono noti come timoni Lumley, furono ideati a metà del secolo scorso e sono tuttora prodotti da diverse aziende.
Si ricorda infine che sono stati ideati anche timoni con flap posto sul bordo d’ingresso, ma tali soluzioni, pur efficaci a migliorare le caratteristiche della pala, sono da evitare per questioni di sicurezza essendo il bordo di ingrasso della pala soggetto all’impatto con oggetti trasportati dal flusso che lo lambisce.
3.16 – Il progetto della pala
Il timone deve essere progettato considerando una serie di vincoli progettuali di diversa natura. Come per ogni altro impianto della nave l’insieme della pala, dell’asse, delle strutture di supporto, dei cuscinetti e dell’agghiaccio deve essere progettato in modo da offrire il minor ingombro e il minor peso. Inoltre, deve essere particolarmente affidabile, poiché la perdita della capacità di governare rappresenta un serio pericolo per la nave, perciò il progetto deve essere semplice e ridondante, il che si traduce in una struttura dalla morfologia non complessa e dimensionata con coefficienti di sicurezza elevati. Come per ogni prodotto commerciale i costi di produzione ed i previsti costi di gestione devono essere contenuti.
Il timone deve essere posto all’interno della volta di poppa, ad opportuna distanza dalla linea di base, dallo specchio di poppa e dall’elica. La distanza minima dalla linea di base è dettata da esigenze di sicurezza, lo scopo è di evitare che il timone venga danneggiato da un eventuale incaglio o durante le operazioni di immissione nel bacino di carenaggio, perciò si fa in modo che il suo bordo inferiore sia rialzato rispetto alla chiglia di circa 150÷200 mm. Analogamente il timone deve essere rientrante dallo specchio di poppa per ridurre il rischio di danni e per sfruttare appieno l’effetto specchio. Infatti, la radice del timone deve essere prossima alla volta di poppa per sfruttare l’effetto specchio, ma deve stare ad una opportuna
115
L’apparato di governo, manovra e stabilizzazione
distanza dalla superficie libera, per ridurre gli effetti della ventilazione, oltre che per evitare che la pala risenta dei colpi di mare o che venga investita da corpi galleggianti.
La distanza dall’elica deve essere opportunamente calibrata per sfruttare al massimo l’effetto della scia senza incorrere in vibrazioni eccessive indotte sul mantello della corrente vorticosa prodotta dall’elica: questo campo alternato di pressioni può possedere infatti armoniche prossime alle frequenze naturali della struttura globale della pala o degli elementi strutturali del mantello. Nel complesso, la trasmissione delle vibrazioni allo scafo deve essere minimizzata, soprattutto quando queste provocano problemi di abitabilità (altre vibrazioni o rumore strutturale possono essere anche indotti dal macchinario di controllo della pala).
Per quanto riguarda la configurazione della pala, dal punto di vista commerciale i timoni convenzionali sono quelli su cui ricade generalmente la scelta degli armatori.
Il timone di più semplice costruzione, e quindi meno costoso, è sicuramente quello a superficie completamente mobile, il vantaggio economico viene reso però meno attraente dal rischio di carenza di robustezza dell’asse di controllo. L’asta del timone deve infatti sopportare forti sollecitazioni flessionali oltre che torsionali e la sua capacità può essere ridotta da fenomeni di fatica. Non è da trascurare inoltre il rischio dello sfilamento accidentale del timone nel caso che la nave sia soggetta a condizioni di mare particolarmente avverse e l’impianto non sia ben mantenuto. Dal punto di vista idrodinamico è preferibile un timone sospeso se il rapporto di forma del profilo è tale da garantire una sufficiente efficienza, ma l’affidabilità del sistema di controllo migliora se è presente un sostegno aggiuntivo oltre all’asta.
Per questioni di sicurezza, e sulla base delle motivazioni sopra esposte, sulla maggior parte delle navi mercantili e militari viene preferita la soluzione su corno, che rappresenta un buon compromesso tra la soluzione su pinna e quella di timone sospeso.
L’uso del calcagnolo comporta un migliore effetto sgravante per l’asta, ma introduce all’estrema poppa un elemento strutturale snello e delicato, che non ha sufficiente robustezza per far fronte a carichi accidentali come quelli dovuti ad un incaglio. Quest’ultima soluzione non viene usualmente considerata, se non su navi di piccole dimensioni, infatti quando le forze in gioco non sono particolarmente elevate il calcagnolo può essere progettato con una sufficiente sicurezza senza essere eccessivamente appesantito, e può costituire una protezione per l’elica e il timone, per esempio per i pescherecci.
116
Cap.3 – Il progetto del timone
Le navi monoelica hanno generalmente un solo timone, a centro nave e quindi nella scia dell’elica. Le navi bielica possono avere uno o due timoni: un solo timone dietro lo skeg di carena, e quindi strutturalmente ben sostenuto, conferisce migliori caratteristiche di controllo della rotta; due timoni nelle scie delle eliche hanno una migliore efficacia idrodinamica e conferiscono alla nave migliori doti di manovrabilità, causando però un aumento della resistenza aggiunta di carena. Si ricorda che per ciascun timone deve essere definito un piano di riposo di minore resistenza, in genere inclinato di pochi gradi (1°÷3°) rispetto al piano diametrale della nave. La maggiore sicurezza derivante dalla ridondanza comporta maggiori costi che si giustificano, in genere, solo per le navi militari e per le passeggeri (ma più di recente anche per le grandi navi petroliere).
Per quanto riguarda la scelte delle caratteristiche morfologiche della pala, valgono le seguenti considerazioni generali:
• profilo – per timoni convenzionali si usano i profili NACA 4–digit; solo per motivi particolari si utilizzano profili diversi: per evitare l’insorgere della cavitazione o per ottenere coefficienti di portanza particolarmente elevati (in tal caso si usano anche pale con flap). Il rapporto di forma del profilo non deve essere elevato. La lastra piana si utilizza quando non si è interessati al rendimento del timone.
• allungamento della pala – deve essere il più possibile elevato, compatibilmente con la dimensione del diametro dell’elica: la parte di pala al di fuori del disco dell’elica risulta infatti poco efficace. Per questo motivo il timone può essere collegato alla volta di poppa da una pinna superiore fissa, avente lo stesso profilo idrodinamico della pala in modo da mantenere un favorevole allungamento effettivo. Questa configurazione è sempre auspicabile quando la volta di poppa è poco profonda rispetto al galleggiamento ed è conveniente quando l’area necessaria ad ottenere l’effetto evolutivo desiderato può stare tutta a poppavia del disco dell’elica.
• sviluppo planare – la pala è sempre a spigoli diritti, con una opportuna correlazione fra rastremazione ed abbattimento. Considerazioni di economicità costruttiva o di robustezza possono fare optare per pale rettangolari ad abbattimento nullo. Il rapporto di forma del profilo deve essere mantenuto costante lungo la campata.
• grado di compenso – deve essere il maggiore possibile per avere minori spese di funzionamento e di installazione dei macchinari di agghiaccio (accettando eventualmente anche un certo grado di instabilità iniziale) ma, per i timoni su corno, compatibilmente con fattori di robustezza ed efficienza.
Si osservi che l’allungamento del profilo e quello della pala sono fra loro legati. Il timone verticale viene infatti collocato nella volta di poppa, a
117

L’apparato di governo, manovra e stabilizzazione
poppavia dell’elica e, per quanto possibile, nella sua scia, perciò può avere una corda massima pari alla distanza tra l’elica e la volta di poppa, al netto delle luci necessarie. In direzione verticale l’altezza della volta di poppa ed il diametro dell’elica sono le dimensioni che obbligano la scelta della campata. Il terzo elemento fondamentale per la definizione delle caratteristiche geometriche della pala è costituito dal diametro dell’asta che si collega alla pala, in genere infatti per ottenere un collegamento avviato è necessario che la parte superiore della pala sia in grado di alloggiare l’accoppiatoio dell’asta.
La bontà del progetto del timone di una nave si misura con la capacità della pala di generare, nell’interazione col flusso d’acqua, la forza necessaria al controllo della rotta e all’accostata. Più precisamente tale operazione deve avvenire con un elevato rendimento della pala e, se possibile, con piccoli angoli di barra per avere una minore usura dell’impianto di manovra.
In genere la scelta del tipo di timone e delle sue caratteristiche deve basarsi sul profilo di missione della nave, favorendo le esigenze di controllo della rotta o quelle di manovrabilità in acque ristrette, tenendo in conto anche l’eventuale presenza di eliche trasversali. La pala deve cioè essere ottimizzata per il controllo della rotta o per la manovra, ricercando, nell’intervallo degli angoli di attacco di lavoro, il valore migliore del rendimento.
Il procedimento di progetto è un processo iterativo di ottimizzazione che prevede le seguenti fasi:
• la scelta dell’area totale del timone in base al confronto con navi simili; • la definizione delle condizioni di lavoro e dei vincoli dimensionali, e
conseguentemente della massima area disponibile per la pala; • la scelta della tipologia di timone, del profilo e dello sviluppo planare
(se l’area disponibile per la pala è sufficiente si considera un timone convenzionale);
• il calcolo della forza idrodinamica trasversale FT generata dalla pala al variare dell’angolo, caratterizzata essenzialmente dal gradiente di crescita ai bassi angoli (∂FT /∂α)α = 0 [N/grado] e dal valore massimo FT,max [N];
• la valutazione del valore minimo YO [N] della forza trasversale di controllo Y [N] richiesta per avere buone doti di evoluzione della nave nelle più gravose condizioni di navigazione previste (la forza Y non è altro che la forza richiesta per generare il momento evolutivo che soddisfa ai criteri di manovrabilità), e la valutazione del minimo gradiente di crescita delle forze di controllo (∂Y /∂α)α = 0, utile per quantificare l’efficacia del timone nelle manovre di correzione della rotta;
• la verifica delle forze di controllo in termini sia di valori massimi, sia di gradienti di crescita:
118
Cap.3 – Il progetto del timone
FT,max ≥ YO [N] (3.16.A)
00
TF Y
ααα α ==
∂ ∂ ≥ ∂ ∂ [N/grado] (3.16.B)
Come indicato nello schema del procedimento, il parametro con cui viene tarato il progetto è l’area della pala, essa rappresenta infatti la caratteristica da cui il progetto è maggiormente influenzato.
Il metodo di previsione approssimata dell’area della pala si basa sul confronto con navi della stessa tipologia (per esempio portacontenitori, cisterne, bulk carriers) e quindi simili per carena, forma della volta di poppa, caratteristiche dell’elica, velocità ed esigenze evolutive, oltre che per tipologia di pala.
Allo scopo di favorire la definizione dell’area del timone, i dati sulle navi esistenti sono stati raccolti in diagrammi o tabulati, esprimendo AR in funzione di un parametro ad essa strettamente legato: l’area del piano di deriva della nave APD [m2]. Essendo un dato di valutazione non immediata, può essere calcolato con buona approssimazione come prodotto fra l’immersione di progetto T [m] e la lunghezza della nave tra le perpendicolari LPP [m], perciò APD ≈ LPP T.
Generalmente, per navi mercantili, AR non supera il valore di 1,5÷2,5% dell’area del piano di deriva. Si vedano ad esempio le formule proposte dai registri di classificazione, e tra queste la formula proposta dal DNV:
2
1 25100R
PP
TL BAL
= +
[m2] (3.16.C)
la quale introduce come fattore correttivo il rapporto B/LPP fra la larghezza B e la lunghezza LPP della nave, rapporto che, diminuendo per navi veloci, riduce il valore dell’area minima prevista. Si osservi infatti che, per navi della stessa tipologia, l’area del timone deve aumentare in maniera inversamente proporzionale alla massima velocità di servizio prevista. Questa formula è valida per timoni posti nel flusso dell’elica, in caso contrario il DNV propone una maggiorazione dell’area del 30%.
Nota l’area, il progetto prosegue con la definizione dell’ingombro massimo, nel rispetto delle minime luci dallo scafo e dall’elica. Si osservi che la distanza minima consigliata dal Lloyd Register tra elica e pala è pari al valore del 12% del diametro dell’elica, e almeno una volta lo spessore massimo tM del timone. Si può quindi scegliere la lunghezza della campata e successivamente si può valutare la lunghezza della corda. Dall’allungamento geometrico si risale infine al valore dell’allungamento effettivo.
119
L’apparato di governo, manovra e stabilizzazione
Si passa poi alla scelta del minimo rapporto di forma del profilo, previo dimensionamento dell’asta con formule esatte o approssimate (quali quelle dei Registri di classificazione), utilizzando per il profilo la legge che si ritiene più opportuna e dopo aver definito il tipo di supporto della pala, il suo sviluppo planare ed il grado di compenso del timone. Si osservi che il diametro minimo così calcolato è tale da verificare le normative, esso rappresenta infatti quello previsto dal Registro e non quello calcolato sui carichi valutati per via diretta.
Una volta che sono state fissate tutte le caratteristiche morfologiche della pala, il calcolo delle forze idrodinamiche viene svolto utilizzando i coefficienti idrodinamici di pala, corretti per la presenza della carena e dell’elica, oppure i coefficienti idrodinamici di profilo, corretti anche per tenere conto dell’allungamento effettivo.
La forza trasversale utile, generata dal timone al variare dell’angolo di barra, deve essere ora confrontata con il valore della forza minima necessaria al controllo della nave nel rispetto delle qualità manovriere richieste dalle normative. Tale confronto di verifica viene effettuato in due fasi:
• il valore massimo della forza trasversale utile (FT)max deve risultare maggiore della forza minima YO necessaria per generare l’accostata della nave, desunta da prove di evoluzione e di zig–zag effettuate su navi simili.
• il gradiente medio della forza evolutiva sviluppata dalla pala per piccoli valori d’angolo di barra (ossia per α ≤ 5°÷10°) deve risultare superiore al tasso minimo di crescita necessario a generare forze di controllo adeguate per il controllo della rotta.
Tale via è difficilmente percorribile a causa della difficoltà correlate al reperimento di dati attendibili (anche per l’imprecisione dei modelli di previsione) relativi alle forze evolutive Y necessarie per garantire una buona manovrabilità nei rispetti delle normative vigenti.
Un metodo alternativo a questa doppia verifica diretta è quello che fa riferimento al cosiddetto coefficiente di efficacia del timone cY [-], definito come:
0Y
PD
L
cq A
αα =
∂ ∂ = [m2] (3.16.C)
in cui q è valutato sulla base della velocità VA. Esso, come si vedrà oltre, ingloba i termini essenziali per la determinazione delle caratteristiche di manovrabilità offerte dal timone.
Per esprimere il coefficiente di efficacia del timone in maniera più esplicita è necessario evidenziare le grandezze da cui dipende la forza di
120

Cap.3 – Il progetto del timone
portanza. A tale scopo si consideri un timone con parte della superficie di pala, di area ARE, esposta al flusso dell’elica. La velocità media del flusso su tale area risulta espressa dall’Eq.3.5.C, mentre la velocità del flusso sull’area rimanente, indicata come (AR – ARE), si valuta con l’Eq.3.4.A:
1 ( 1 1)R A m TRE
V V k CA = + + −
( )R AR RE
V VA A
=−
[m/s] (3.16.D)
Richiamando l’espressione della portanza L in funzione del coefficiente di portanza cL e considerando separatamente i contributi della superficie nel flusso della carena e di quella nel flusso dell’elica, si può scrivere:
( ) ( )
2
2 2
1212
R R L
L R RE R R RERE R RE
V
V V
L A c
c A A AA A A
ρ
ρ
=
= + −
− [N] (3.16.E)
e sostituendo le relazioni per la velocità 3.16.D e 3.16.E, si ottiene l’espressione:
( )221 1 1 ( 1 1)2
REA R L m T
R
VAL A c k CA
ρ
1 = + + + − − [N] (3.16.F)
in cui si può indicare con KE [-] il fattore di correzione della velocità del flusso che raccoglie gli effetti della presenza dell’elica:
( )21 1 ( 1 1)RE
E m TR
AK k CA
= + + + − − 1 [-] (3.16.G)
Infine, utilizzando le espressioni 3.16.F e 3.16.G il coefficiente di efficacia del timone si può riscrivere come:
0
R LY E
PD
A cc KA αα =
∂ = ∂ [-] (3.16.H)
dalla quale risulta evidente che il coefficiente cY riunisce i parametri principali per il progetto della pala, ossia:
• l’area della superficie della pala (espressa in proporzione all’area del piano di deriva), che rende conto della forza massima di controllo sviluppabile dal timone;
• il gradiente delle forze specifiche di controllo (espresso tramite il coefficiente di portanza che ben si presta ad approssimare il
121
L’apparato di governo, manovra e stabilizzazione
coefficiente della forza normale), che rende conto della velocità di risposta del timone in termini di generazione della forza per il controllo della rotta;
ai quali si aggiunge il fattore KE che introduce le correzioni necessarie per considerare l’effetto dell’elica nella generazione di dette forze.
Riguardo al gradiente di crescita delle forze va detto che esso serve a garantire un controllo veloce della rotta. Infatti, se sono sufficienti piccoli angoli di barra per ottenere le forze volute si ha il vantaggio di dover manovrare poco il timone e di generare tali forze in intervalli di tempo minori. Si ricorda che la velocità del timone è testata nel cosiddetto hard rudder test.
Il percorso standardizzato che si basa sulla definizione del coefficiente di efficacia del timone prevede di confrontare il cY calcolato con il valore minimo cYO che, desunto da prove al vero su navi simili, garantisce alla nave le doti di manovrabilità richieste.
I risultati delle prove per la valutazione di detto indice sono espressi in funzione dei parametri significativi della nave ai fini delle qualità manovriere. Tra i più importanti si menzionano: la massima velocità di servizio della nave VS, il coefficiente di finezza cB, il rapporto LPP/T ed il rapporto i/L (si rammenta che i [m] esprime il raggio di girazione di massa calcolato rispetto all’asse baricentrico verticale). Inoltre, quando la nave ha una superficie di vela AL [m2] molto elevata, il valore di verifica cYO è quello ottenuto da prove condotte in presenza di vento costante a diverse velocità, ed ai parametri significativi si aggiunge il rapporto AL/APD tra l’area longitudinale esposta al vento e l’area del piano di deriva.
In ultima analisi, quando non sono disponibili né i valori delle forze di manovra Y, né il valore del minimo coefficiente di efficacia del timone cYO, non rimane che soprassedere alla fase di verifica, e la bontà del progetto rimane condizionata essenzialmente dalla scelta dell’area della pala AR: per questo motivo, almeno in tali casi, è necessario che i dati tramite i quali si opera la scelta dell’area di pala siano estremamente affidabili.
3.17 – La configurazione strutturale
Per descrivere la configurazione strutturale del timone, comprensiva degli elementi di sostegno e controllo, è utile fare innanzitutto riferimento ad una configurazione semplice come quella utilizzata nelle prime navi in acciaio.
Si tratta di una pala a semplice lastra piana, sostenuta da braccioli orizzontali che possono essere posti alternativamente da un lato e dall’altro e che sono fissati ad un sostegno verticale allineato al bordo di ingresso della pala. Tale sostegno, detto fusto o spalla, è collegato tramite cerniere al dritto
122
Cap.3 – Il progetto del timone
di poppa, ove i cardini, detti agugliotti, sono costituiti da perni che ad una estremità hanno una sezione tronco–conica allo scopo di essere bloccati al fusto stesso o al dritto. All’altra estremità essi ruotano in alloggiamenti cilindrici, detti femminelle. L’ultima femminella in basso può essere ricavata nel prolungamento del calcagnolo, la struttura inferiore di chiusura del pozzo dell’elica.
La rotazione del timone avviene per azione dell’asta o miccia collegata, a poppavia dell’asse di rotazione, alla radice della pala con una flangia verticale od orizzontale o con un accoppiatoio a parelle. Il sistema complessivo è perciò formato dall’asta e dalla pala che è sostenuta dal dritto di poppa tramite gli agugliotti. Esso per poter ruotare richiede ovviamente che l’asse dell’asta e l’asse degli agugliotti siano coincidenti.
La configurazione di pala finora descritta è quella di pala a semplice lamiera, usata al giorno d’oggi solo su piccole imbarcazioni. La pala del timone di una moderna nave è infatti carenata, formata cioè da un mantello di fasciame stagno adagiato su una struttura interna di supporto.
Inizialmente la struttura interna di sostegno del mantello ed il fusto costituivano un unico telaio, ottenuto per fusione. Ora il fusto non ha più ragione di essere presente poiché la pala è a struttura portante, costituita da diaframmi in lamiera, orizzontali e verticali, disposti cioè in modo da formare un grigliato. Essi devono essere allineati con le strutture di supporto della pala, sia l’asta sia l’eventuale corno, e devono essere disposti in modo da suddividere il mantello in pannelli di opportune dimensioni (indicativamente fra 600 mm e 900 mm, in funzione della dimensione della pala) e, quando possibile, di allungamento unitario. Il diaframma verticale posto in continuazione dell’asta deve essere particolarmente robusto e può essere eventualmente raddoppiato. I diaframmi orizzontali estremi sono anche detti coperchi. Infine, il bordo di uscita può essere ottenuto saldando uno sull’altro gli spigoli dei due semi–mantelli, oppure inserendo tra le due lamiere una lama.
I mantelli vengono collegati ai diaframmi con saldature che solo su un lato possono essere fatte dall’interno: la saldatura del secondo lato del mantello viene effettuata dall’esterno con il sistema delle asole. In pratica, sui diaframmi vengono saldate delle piattabande in corrispondenza delle quali sul mantello vengono praticati dei fori: il collegamento del mantello viene fatto tramite cordoni di saldatura stesi tra lo spessore del mantello stesso e le piattabande. Invece di essere forato per ricavare delle asole, il mantello può essere tagliato in più pannelli in corrispondenza delle piattabande (sistema ad asola continua). In alternativa i diaframmi possono essere lavorati, su un lato, in modo da presentare degli occhielli sporgenti, in corrispondenza dei quali devono corrispondere le asole del mantello: la saldatura viene effettuata in maniera analoga e successivamente gli occhielli,
123
L’apparato di governo, manovra e stabilizzazione
che servono per forzare con dei cunei il mantello sui diaframmi, vengono tagliati.
Sul mantello si possono individuare alcuni particolari, quali i fori di aleggio, i portelli per l’ispezione e lo smontaggio degli agugliotti o dell’asta, i fori di sollevamento. Inoltre, sul coperchio superiore ed a scafo sono fissati degli scontri di fine corsa per limitare l’angolo di barra del timone, a meno che l’agghiaccio non sia dotato di un proprio dispositivo di fine corsa. In alternativa, per i timoni su corno, gli scontri, compreso quello per evitare il sollevamento, possono essere previsti alla base del corno.
Sul grigliato vengono saldati gli accoppiatoi tronco–conici per gli agugliotti e per l’asta (o la flangia per l’asta). Questi elementi, ottenuti per fusione, portano delle alette per il collegamento di testa delle lamiere dei diaframmi e sono eventualmente sagomati in modo da partecipare alla definizione della superficie avviata della pala (il loro ingombro trasversale è di circa 1,75 volte il diametro dell’asta). L’accoppiamento fra l’asta e la pala viene effettuato con sistemi oleodinamici, sia per il serraggio dei dadi, sia per la forzatura dell’asta entro l’accoppiatoio tronco–conico.
L’asta di comando del timone entra a scafo attraverso un’apertura detta losca, un’appendice negativa di carena costituita da un volume non stagno ricavato entro l’avviamento del fasciame della volta di poppa. Il passaggio stagno dell’asta è garantito da un cuscinetto radiale munito di guarnizione a pressatrecce. Il pressatrecce è costituito da una serie di anelli di guarnizione intrisi di grasso, un tempo canapa oggigiorno anche fibre sintetiche, posti fra l’asta e il cuscinetto e tenuti in posizione da due semi–anelli fissati al cuscinetto con viti prigioniere.
L’asta prosegue poi fino al ponte che ospita l’impianto di timoneria o agghiaccio, ove è sostenuta da un cuscinetto radiale e da uno assiale (il reggispinta) che regge, oltre al peso dell’asta, anche quello della pala. La forza verticale è costituita dal peso proprio del timone ridotto della spinta archimedea sulle parti immerse e può essere aumentata o diminuita dall’effetto delle forze inerziali. Il cuscinetto assiale viene anche detto capodrina e deve essere corredato da uno scontro per impedire il sollevamento del timone quando prevalgono le forze verso l’alto. In alcune sistemazioni particolari i cuscinetti di losca e di agghiaccio possono essere sostituiti da due cuscinetti in unico lungo astuccio, munito inferiormente di guarnizione stagna. Infine, all’estremità superiore dell’asta è calettata la barra di comando, sulla quale agiscono gli attuatori dell’agghiaccio.
L’asta è in acciaio, ottenuta per fucinatura, laminazione o fusione, e presenta una sezione circolare costante, eventualmente rastremata tra i cuscinetti di losca e di agghiaccio, zona nella quale il momento flettente è generalmente basso.
124
Cap.3 – Il progetto del timone
I cuscinetti radiali sono formati da una boccola calettata nella camicia saldata su una struttura di supporto e hanno un’altezza massima pari a circa 1,0÷1,2 volte il diametro dell’asta poiché non devono interferire con quest’ultima quando si flette sotto l’azione del carico. Essi sono del tipo a strisciamento e l’usura è contrastata da una piccola quantità di lubrificante, generalmente grasso ma anche acqua di mare. Ciò è reso possibile dal fatto che su di essi in genere si realizzano valori di pressione e di velocità relative non elevati.
La pressione convenzionale p agente su un cuscinetto radiale è definita come il rapporto tra la forza radiale scaricata sul cuscinetto e l’area della superficie cilindrica del cuscinetto proiettata sul piano contenente l’asse, in altre parole l’area ottenuta dal prodotto tra l’altezza del cuscinetto ed il suo diametro.
In luogo del prodotto fra pressione e velocità relativa (indicato usualmente con la sigla PV), trattandosi di sistemazioni con basse velocità relative tra l’albero e il cuscinetto, la scelta del materiale viene fatta confrontando la massima pressioni ammissibile con quella prevista. Quest’ultima è nota una volta che è stata valutata la reazione vincolare che matura sul cuscinetto di supporto.
Per le boccole nelle quali deve strisciare l’albero si utilizzano perciò materiali che necessitano di una minima lubrificazione. Il cuscinetto assiale è anch’esso del tipo a strisciamento (ma può anche essere a rulli su piccole imbarcazioni).
Un tempo i cuscinetti erano anche formati da un corona di doghe in legno duro (legno santo o lignum vitae) alloggiate in una camicia di bronzo. Anche l’asta aveva una camicia in bronzo o in ottone, la lubrificazione era ottenuta con acqua di mare ed il bronzo era inserito per evitare problemi di corrosione.
Un buon materiale per i cuscinetti dei timoni deve possedere in generale basso coefficiente di attrito statico e dinamico, durezza sufficiente, buona resistenza all’usura e alta resistenza all’ambiente corrosivo marino e stabilità di prestazioni anche a basse temperature. È inoltre preferibile che il materiale abbia buone caratteristiche di auto–lubrificazione in modo da non dover installare impianti di lubrificazione ad olio.
Nelle nuove costruzioni i cuscinetti hanno boccole in metallo bianco (lega antifrizione di rame, stagno, piombo e antimonio) oppure in materiali sintetici. Tra queste si ricordano, in ordine crescente di durezza – e quindi di capacità di sopportare carico radiale – i policarbonati, il Nylon, il PTFE (Teflon) e le resine fenoliche. Altri materiali usati sono quelli metallici.
125

L’apparato di governo, manovra e stabilizzazione
Il legno ed il metallo bianco sopportano pressioni di lavoro piuttosto basse, pari a 2,5 N/mm2 per il legno santo ed in 4,5 N/mm2 per il metallo bianco lubrificato ad olio. Va osservato che la lubrificazione ad olio su boccola in metallo bianco è preferibile laddove vi sia una velocità relativa di rotazione pressoché costante perché in tal modo si dà la possibilità all’olio di formare una sottile pellicola fra le parti in movimento reciproco. Nel caso del timone, dal momento che la rotazione è non è continua e spesso si inverte fra un azionamento e l’altro, questa soluzione non porta in genere alcun vantaggio, richiedendo altresì un impianto di riempimento e circolazione dell’olio.
Per quanto riguarda le resine sintetiche, si considerano adeguati all’uso quei materiali che garantiscano pressioni di contatto ammissibili di almeno 5,5 N/mm2 e che abbiano nel contempo durezze “Shore D” pari ad almeno 60÷70.
I materiali sintetici soffrono, rispetto a quelli metallici, di limitazioni nelle temperature di utilizzo, di minore stabilità dimensionale e di minor capacità di carico (hanno cioè pressioni convenzionali limite più basse), d’altro lato sono però più economici. Fra questi il più utilizzato è il PTFE che è auto–lubrificante, ha un coefficiente di frizione eccezionalmente basso, una buona resistenza agli attacchi chimici e stabilità in un ampio intervallo di temperature (fino a circa 250°C) ma per contro ha una bassa resistenza meccanica (circa 4,5 N/mm2). Per questo motivo si ricorre a materiali compositi con PTFE:
• PTFE caricato – viene addizionato con altri materiali, fibra di vetro, carbone, bronzo grafite in forma di polveri, allo scopo di aumentare la resistenza meccanica, ottenendo così pressioni limite di esercizio di circa 11,0 N/mm2. In alternativa il PTFE costituisce un legante per materiali metallici porosi (come per esempio il bronzo) permettendo di costruire cuscinetti con uno strato superficiale a bassa frizione (si osservi che il supporto in bronzo ha lo scopo di migliorare le caratteristiche meccaniche e di favorire l’asportazione di calore).
• tessuto di PTFE – nella forma di tessuto è in grado di sostenere carichi elevati e può essere intrecciato con fibre naturali o sintetiche o ancora con fibra di vetro; in questa forma viene sostenuto da una camicia di acciaio. Le pressioni limite di esercizio sono in questi casi ancora più elevate.
Anche il Nylon viene usato per fabbricare boccole per cuscinetti: è auto–lubrificante, ha un basso coefficiente d’attrito, la resistenza meccanica assieme alla resistenza all’usura vengono migliorate con additivi ma le temperature massime di esercizio rimangono basse (circa 90°C). Al giorno d’oggi il Nylon è usato in luogo del PTFE caricato quando le temperature di esercizio non sono alte e va a sostituire i cuscinetti fatti da fibre naturali o
126
Cap.3 – Il progetto del timone
sintetiche annegate in matrice fenolica, che, pur economici, sono però caratterizzati da una bassa conducibilità termica e necessitano di lubrificazione ad olio.
Quando le pressioni di esercizio sono alte, ossia per timoni di grandi dimensioni, le boccole possono essere costituite da bronzo, acciaio inossidabile (o acciaio resistente all’usura) o infine da materiali ottenuti per sinterizzazione. Nel complesso questi materiali sono ritenuti adatti all’utilizzo nei cuscinetti dei timoni se la loro pressione convenzionale massima è di almeno 7,0 N/mm2.
La sinterizzazione è un procedimento della metallurgia delle polveri con il quale si ottiene un intimo legame fra componenti diversi tramite una specie di pressatura a caldo. Con questo procedimento si ottiene una struttura molto porosa, i vuoti arrivano infatti al 10÷35 % del volume totale, che può assorbire e trattenere il lubrificante per azione capillare.
I materiali di sinterizzazione per la costruzione di cuscinetti sono a base di bronzo o di ferro. In particolare, il bronzo (90% rame, 10% stagno) si presta alla produzione di cuscinetti che hanno buona resistenza alla corrosione ed all’usura e l’aggiunta di grafite riduce il fattore d’attrito.
Per quanto riguarda le guarnizioni si usano sia fibre naturali (canapa sativa), sia materiali sintetici. Fra questi si rammentano le trecce formate da fili in PTFE che hanno elevata resistenza agli agenti chimici, alta resistenza meccanica e qualità antifrizione elevatissime (non necessitano infatti di lubrificazione).
Si osservi che se il cuscinetto non è auto–lubrificante (ed in tal caso è sufficiente la presenza di acqua di mare o di grasso) allora anche all’esterno va posta una tenuta per evitare che l’acqua di mare si misceli con l’olio di lubrificazione.
L’asta e gli agugliotti vengono superficialmente rinforzati in corrispondenza dell’accoppiamento con i cuscinetti radiali per proteggerli, a scapito dei cuscinetti, dai danni causati dall’usura. In genere è previsto un indurimento superficiale ottenuto con procedimento di cementazione o di nitrurazione, oppure anche una camicia o un riporto in acciaio inossidabile (l’indurimento della superficie di contatto è indispensabile quando si usano boccole metalliche).
Il momento resistente di frizione sull’asta viene calcolato come:
12F A F RQ D µ= F [Nm] (3.17.A)
dove DA [m] è il diametro dell’asta, µF [-] il coefficiente d’attrito – i cui valori possono essere assunti in base alle indicazioni dei Registri – ed FR [N]
127
L’apparato di governo, manovra e stabilizzazione
la forza radiale applicata sul cuscinetto. Ovviamente il momento di controllo agente sull’asta deve vincere anche un simile momento d’attrito generato su ogni accoppiamento fra agugliotto e femminella.
Nel caso dei timoni Simplex ad agugliotto passante, questo agugliotto appoggia su due cuscinetti interni alla pala, posti alle estremità della stessa, e la struttura a grigliato viene a modificarsi inglobando un rinforzo tubolare entro il quale passa appunto l’agugliotto continuo.
Per concludere, le strutture del corno, della pinna e del calcagnolo hanno una configurazione simile a quella della pala, ossia un supporto interno fatto da un grigliato di lamiere saldate o da un telaio fucinato. La struttura di ancoraggio a scafo è rinforzata sia in corrispondenza del corno, sia in prossimità dei supporti per i cuscinetti.
3.18 – Il progetto strutturale
Il sistema strutturale complessivo del timone è formato dalla pala – sorretta eventualmente dagli agugliotti del corno e del calcagnolo – e dall’asta, sorretta a sua volta dai cuscinetti di losca e di agghiaccio. L’insieme dell’asta e della pala può essere trattato come una struttura unica poiché il collegamento fra le due parti è ottenuto con un accoppiamento rigido che garantisce l’effetto di incastro perfetto fra le due parti.
Il progetto della struttura del timone e dei suoi elementi di sostegno consiste nel dimensionamento delle varie parti sollecitate dall’azione delle forze idrodinamiche, della forza peso e del momento di controllo esercitato dalla timoneria, oltre che dall’azione delle forze di attrito sulle parti in movimento reciproco. Si tratta in pratica di valutare le forze reciprocamente scambiate fra le diverse parti e successivamente di verificare che esse resistano agli sforzi che maturano. In sintesi gli elementi da dimensionare sono:
• la pala (rudder blade), formata da mantello e diaframmi, • l’asta (rudder stock), • gli accoppiatoi (rudder stock couplings), gli agugliotti (pintles) ed i
cuscinetti (bearings), • le strutture di sostegno, quali il corno (horn) o il calcagnolo (solepiece),
ivi compresi gli ancoraggi entro scafo. Tra queste parti, il maggior interesse deve essere rivolto agli elementi più critici del sistema, ossia l’asta e la pala – e come noto il primo elemento ad essere dimensionato è proprio l’asta.
Il modello strutturale per il progetto dell’asta può essere definito tramite un sistema di travi rettilinee, ovvero una trave a più campate, in cui la pala stessa è rappresentata da un elemento mono–dimensionale a comportamento
128
Cap.3 – Il progetto del timone
equivalente ai fini della flessione. In tale configurazione il carico distribuito sulla lunghezza della pala viene equilibrato sia dagli appoggi fissi o cedevoli offerti dai cuscinetti (che esercitano forze di reazione vincolare radiali o assiali), sia dal macchinario d’agghiaccio (che esercita il momento torcente di controllo).
La determinazione delle reazioni vincolari e delle caratteristiche di sollecitazione sul sistema di travi richiede in genere l’utilizzo di metodi di risoluzione specifici per le strutture iperstatiche, che possono essere analitici, e in tal caso può essere applicato il metodo dei quattro momenti oppure quello iterativo noto come metodo di Cross, oppure numerici (calcolo agli Elementi Finiti).
Si ricorda che le forze idrodinamiche generate dalla pala vengono trattate con riferimento alla risultante F applicata sul centro di pressione CP ed inclinata dell’angolo ϕ rispetto al piano normale alla pala. Per valutare lo stato di sollecitazione, il sistema appena descritto viene ridotto ad un sistema equivalente traslando la forza F sull’asse di rotazione ed aggiungendo il momento torcente di trasporto Q. Trascurando la distanza fra l’asse di rotazione e quello baricentrico, si applica la teoria della trave ideale di De Saint–Venant (trave con carico e vincoli agenti sull’asse baricentrico).
È quindi chiaro che, per quanto riguarda lo stato di sollecitazione, il sistema sperimenta una sollecitazione di flessione deviata composta (momento flettente in presenza di taglio) causata da F, ed una torsione causata da Q. Trattandosi di strutture snelle, la sollecitazione derivante dal momento flettente è quella dominante, a meno che l’asta non venga opportunamente sgravata dal flettente – per esempio irrigidendo la pala con un fusto disaccoppiato dall’asta, o con un agugliotto passante, o ancora con più appoggi ravvicinati –, in tal caso rimane la sola torsione, che comunque è sempre presente. Un altro caso particolare è quello in cui anche la sollecitazione da taglio può essere elevata, si tratta della configurazione in cui i cuscinetti sono molto vicini ed esercitano elevate forze radiali.
3.19 – Il modello per lo studio dell’asta
La definizione del modello strutturale per il calcolo analitico richiede la valutazione delle caratteristiche delle singole travi componenti – l’asta e la pala –, in termini sia di lunghezze efficaci, sia di sezioni resistenti. La conoscenza di questi dati permette infatti di valutare i momenti d’inerzia rispetto all’asse neutro e conseguentemente le rigidezze flessionali delle travi tramite le quali si possono poi valutare i moduli di resistenza per la successiva verifica delle sollecitazioni. Si osservi che, sia per quanto riguarda la torsione, sia per la flessione, l’elemento critico è l’asta.
129

L’apparato di governo, manovra e stabilizzazione
La sezione resistente dell’asta è una sezione circolare piena, avente momento d’inerzia JA [m4] rispetto all’asse neutro pari a:
4π4 2
AA
DJ =
[m4] (3.19.A)
e momento polare JO [m4] pari a: 4π2
2 2A
O ADJ J = =
[m4] (3.19.B)
La sezione resistente della pala è costituita dagli elementi strutturali a elevato sviluppo longitudinale, ossia dal mantello e dai diaframmi verticali. Il calcolo della rigidezza flessionale della pala viene svolto usualmente per mezzo di un modello geometrico semplificato ottenuto rettificando la curva del mantello. Perciò per il generico i–esimo tratto rettificato di spessore ti [mm], lunghezza li [mm] ed inclinazione θi [°] rispetto al diametrale della pala, il momento d’inerzia baricentrico JPi [m4] rispetto all’asse parallelo all’asse diametrale della pala (asse diametrale che costituisce, come si vedrà più avanti, l’asse neutro della pala) vale:
( ) ( )2 23 31 1cos sin12 12i iPi i i i iJ t l l tθ θ= + [m4] (3.19.C)
e il momento d’inerzia della pala complessiva è dato dalla somma dei momenti d’inerzia propri e di trasporto dei singoli elementi di lamiera:
( )2
12
n
P Pi i ii
iJ J l t d=
= +∑ [m4] (3.19.D)
in cui di rappresenta la distanza del baricentro di ogni elementino dall’asse diametrale della pala e con n si è indicato il numero totale di elementi rettilinei con cui si sono definiti il mantello e i diaframmi relativamente alla struttura che sta da un lato del piano diametrale della pala (da qui il fattore 2 per ottenere il momento d’inerzia complessivo).
La pala formata da una semplice lamiera consente una modellazione più diretta della trave equivalente, è infatti sufficiente considerare la sezione resistente formata da pala e fusto.
Per quanto riguarda i vincoli, i cuscinetti radiali di supporto dell’asta vengono considerati dei semplici appoggi, trascurando la loro estensione longitudinale sia per sicurezza, sia per creare un modello più aderente alla realtà, in quanto l’effetto incastrante è generalmente ridotto. Infatti, i cuscinetti devono essere di altezza limitata per non interferire con l’asta in flessione (per lo stesso motivo la rigidezza flessionale dell’asta deve essere controllata, soprattutto quando si usano acciai ad elevata resistenza).
130
Cap.3 – Il progetto del timone
Parallelamente, le cerniere formate da agugliotti e femminelle vanno considerate come semplici appoggi, eventualmente cedevoli sotto l’azione delle forze indotte dal timone. In questi casi il vincolo deve essere considerato elasticamente cedevole e deve essere opportunamente valutata la rigidezza alla traslazione: è questo il caso dei cuscinetti di appoggio della pala sul corno, sulla pinna e sul calcagnolo.
Le rigidezze del calcagnolo e del corno vengono usualmente calcolate con modelli a travi a sezione costante considerando l’effetto della sola componente trasversale della forza ivi scaricata. Tali supporti cedevoli comportano una deformazione del sistema che non è necessariamente piana, infatti da una parte i supporti si deformano trasversalmente al diametrale della nave mentre la pala tende a deformarsi ortogonalmente al suo piano diametrale. Per risolvere il sistema in maniera analitica si accetta quindi l’ipotesi semplificativa di cedimenti paralleli tra loro e normali al piano diametrale della pala. Ciò comporta un’ulteriore approssimazione nel calcolo delle rigidezze dei supporti.
Poiché, in generale, il modello può essere a travi con sezione variabile lungo la campata, si devono utilizzare i metodi risolutivi specifici per travi a sezione variabile o, in alternativa, si può applicare l’ipotesi della “falsa posizione” per creare campate fittizie a sezione costante. Tale situazione si verifica per esempio quando il cuscinetto di losca è lontano dalla radice della pala oppure quando la pala ha una geometria fortemente variabile lungo la campata, mentre in genere viene trascurata la rastremazione dell’asta tra agghiaccio e losca.
L’ipotesi della falsa posizione si applica quando una campata è formata da una trave che per un certo tratto ha una sezione costante e per la parte rimanente un’altra sezione pure costante. Esso consiste nell’inserire un appoggio in un punto di comodo della travatura, quello di variazione della sezione, e nel cercare la soluzione del problema strutturale facendo cedere anelasticamente la trave in quel punto finché la reazione di vincolo ivi maturata non si annulla. Le fasi di applicazione del metodo sono di seguito descritte.
Partendo dal sistema iniziale Σ0 si identifica il punto P in cui separare la campata e si inserisce in tale punto un appoggio con cedimento anelastico incognito, ottenendo il sistema modificato Σ1 nel quale però la reazione vincolare in P deve essere nulla affinché vi sia congruenza ed equilibrio con il sistema di partenza:
Σ0 ≡ (Σ1, RP = 0) (3.19.E)
A questo punto si risolvono separatamente i due sottosistemi così definiti:
131

L’apparato di governo, manovra e stabilizzazione
• il sistema Σ1A nel quale la struttura è sollecitata dal vero carico agente e dagli eventuali cedimenti di vincolo, escluso il cedimento in P ove l’appoggio viene mantenuto fisso; si calcola così in P la reazione RP,1A [N] ivi maturata per il solo effetto del carico e dei vincoli cedevoli;
• il sistema Σ1B nel quale la struttura è sollecitata dal solo spostamento anelastico in P, la struttura è infatti scarica e con gli altri vincoli cedevoli bloccati nella posizione di riposo.
Poiché però il cedimento vero nel punto P non è noto, il sistema Σ1B si risolve in due passi successivi:
• prima si impone un cedimento arbitrario pari ad un valore di comodo, per esempio δP,1B =1 [m], e si calcola in P la reazione vincolare RP,1B [N] maturata per il solo effetto del cedimento δP,1B ;
• poi, richiamando la linearità fra carico e stato di sollecitazione e deformazione ed indicando con δP lo spostamento vero nel punto P, si ottiene la relazione per la determinazione della vera reazione RP,1B:
, ,,
PP 1B P 1B
P P 1B
R Rδδ δ
= [N] (3.19.F)
in cui δP rimane incognita. A questo punto si può esprimere il valore totale della reazione RP del
sistema Σ1, essa infatti in base al principio di sovrapposizione degli effetti vale:
, ,,
PP 1 P 1A P 1B
P 1B,R R Rδ
δ= + [N] (3.19.G)
Si osservi ora che la reazione vera nel sistema di partenza Σ0 è nulla perché l’appoggio nel punto P in realtà non esiste, di conseguenza affinché il sistema Σ1 sia congruente ed in equilibrio con il sistema iniziale deve essere:
, , ,,
0PP 1 P 1A P 1B
P 1B
R R Rδδ
= + = [N] (3.19.H)
dalla quale si ottiene il valore dello spostamento vero δP nel punto P:
,,
,
P 1AP P
P 1B
RR 1Bδ δ= − [N] (3.19.I)
In pratica, fra tutte fra le soluzioni congruenti con il sistema di partenza si ottiene l’unica che sia anche di equilibrio, ossia l’unica soluzione che fornisca una reazione nulla nel punto P.
Una volta determinato il valore dello spostamento nel punto in cui si era posto l’appoggio fittizio, si possono calcolare le caratteristiche di
132
Cap.3 – Il progetto del timone
sollecitazione del sistema di partenza sommando a quelle del sistema Σ1A i valori ottenuti dal sistema Σ1B dopo averli moltiplicati per δP.
In base alle possibili configurazioni del timone, nella pratica si possono distinguere le seguenti diverse situazioni di calcolo:
• timone sospeso, • timone su calcagnolo, • timone su corno (con appoggio unico sul corno), • timone su più agugliotti.
Nel caso di timone sospeso, la trave equivalente è costituita da due campate: partendo dal basso si ha prima la campata che si estende dal fondo della pala fino al centro del cuscinetto di losca, poi quella che rappresenta l’asta compresa fra i due cuscinetti di losca e di agghiaccio. Si osservi che il sistema è isostatico su appoggi fissi.
Nel caso di timone su calcagnolo, la trave equivalente è costituita da due campate: partendo dal basso si ha prima la campata che si estende dal fondo della pala al centro del cuscinetto di losca, poi quella che rappresenta l’asta compresa fra i due cuscinetti di losca e di agghiaccio. Si osservi che il sistema è iperstatico e l’appoggio di calcagnolo è del tipo cedevole elasticamente. La prima campata presenta una trave a sezione variabile in quanto comprende sia la pala, sia l’asta. Perciò, se l’estensione dell’asta in questo tratto non è trascurabile, si ricorre all’interposizione di un appoggio fittizio allo scopo di ridurre la travatura ad un sistema di travi a sezione costante (e si risolve con il metodo della falsa posizione). Si osservi ancora che viene usualmente trascurata la distanza fra il centro dell’agugliotto di calcagnolo ed il fondo della pala.
Per il timone su corno con appoggio unico, la trave equivalente è costituita da tre campate: partendo dal basso si ha prima la campata che si estende dal fondo alla sezione della femminella sull’estremità inferiore del corno, poi quella che si estende da lì sino al coperchio della pala, e poi verso l’alto la configurazione è come quella sopra descritta. Si osservi che il sistema è iperstatico e l’appoggio sul corno è del tipo elasticamente cedevole.
Infine, per i timoni su più agugliotti si ha una situazione strutturale particolare. È questo infatti il caso che si presenta quando la pala è sostenuta da una pinna, o da un dritto di poppa, o ancora da un corno con più appoggi. La trave equivalente è costituita qui da molte campate, poiché ad ogni agugliotto corrisponde un appoggio (in genere fisso): in virtù dei rapporti dimensionali, si può ritenere che tale sistema di sostegno sia da considerarsi un appoggio continuo e che esso in pratica costituisca una specie di incastro per il tratto su cui si estende. Ciò significa che, a differenza dei casi sopra citati, l’asta si considera sgravata dal carico flessionale prodotto dalla pala, infatti la presenza di un appoggio molto robusto lungo la pala impedisce alla
133

L’apparato di governo, manovra e stabilizzazione
stessa di flettersi e quindi di trasmettere un momento flettente all’asta, e perciò questa si dimensiona a solo torcente.
Appare evidente che, oltre a quest’ultimo caso, lo studio dell’asta può prescindere dalla modellazione della pala anche quando il timone è sospeso. D’altro lato, risulta invece necessario generare un modello strutturale completo quando la flessione della pala influenza quella dell’asta (è questo il caso dei timoni su corno e su calcagnolo). Nel caso di timone Simplex con agugliotto passante, si verifica un irrobustimento della pala per effetto della maggiore rigidezza offerta dal contatto sui cuscinetti interni, perciò la pala, portando in flessione l’asta passante, si comporta come un sistema più rigido sgravando l’asta di comando da gran parte del momento flettente.
Anche nel caso in cui l’asta sia sostenuta da appoggi di losca e di agghiaccio molto vicini, l’effetto incastrante può essere molto elevato ed il modello può essere limitato alla sola parte di struttura che manifesta sollecitazioni flessionali.
Il calcolo delle forze agenti sul sistema equivalente di travi richiede qualche osservazione. Infatti, la forza F ha una componente normale ed una assiale rispetto alla pala, e ciò comporta una flessione deviata. D’altro lato la componente assiale, dello stesso ordine di grandezza rispetto a quella normale, lavora sul piano di massima inerzia della pala e perciò induce uno stato di sollecitazione molto più basso rispetto alla prima.
Ciò comporta la possibilità di definire un approccio approssimato nel quale la componente assiale venga trascurata, oppure, in alternativa, venga annullata facendo ruotare la forza F dell’angolo –ϕ. In ciascuno dei due modi il calcolo viene semplificato dovendo trattare una flessione retta che si manifesta con asse coniugato coincidente con l’asse di simmetria della pala – questo piano coincide con quello di minima inerzia e la verifica si configura quindi come una verifica dalla parte della sicurezza.
Inoltre, per riprodurre con fedeltà il sistema strutturale, sul modello di travi equivalenti la forza idrodinamica F va distribuita lungo la campata. In questo modo si definisce un carico per unità di lunghezza q(x) [N/m] che dovrebbe essere distribuito con legge pressoché ellittica, ma che in pratica viene ridotto ad una distribuzione lineare con risultante sul baricentro dell’area della pala. Per una pala rettangolare si ha semplicemente q = F / b.
Per lo studio dell’asta dei timoni sospesi, trattandosi di un sistema isostatico, la rotazione della forza F non introduce alcuna approssimazione, e la modellazione del carico non è necessaria poiché, per il dimensionamento dell’asta, è sufficiente valutare il momento flettente MO [Nm] in corrispondenza del cuscinetto di supporto di losca, che vale:
MO = F (CPS + dO) [Nm] (3.19.J)
134
Cap.3 – Il progetto del timone
dove dO è la distanza fra il coperchio della pala e il centro del cuscinetto di losca. Tale momento d’estremità costituisce proprio il carico sul sistema risolutivo.
I carichi dominanti sulle aste, come detto, sono generalmente quelli determinati dalla flessione semplice e dalla torsione. Può essere anche considerato l’effetto del taglio, ma soprattutto per aste tozze ed in particolare per il dimensionamento degli agugliotti.
Le caratteristiche di sollecitazione del taglio e del momento flettente possono essere tracciate in maniera qualitativa, poiché la struttura dell’asta assume configurazioni standard, infatti i risultati qualitativi sono molto utili per confrontare le varie tipologie classiche di timone (timone sospeso, su corno, su calcagnolo e su appoggio continuo), soprattutto quando lo studio comparativo viene svolto mettendo in evidenza le variazioni di carico indotte dalla cedevolezza degli appoggi. Per quanto riguarda il calcolo delle sollecitazioni da momento torcente, il carico ha distribuzione costante lungo l’asta (si trascurano infatti i momenti resistenti d’attrito) e il sistema risulta sempre isostatico.
3.20 – Lo stato tensionale sull’asta
Le verifiche a snervamento sull’asta vengono condotte sulle sezioni maggiormente caricate, in genere in corrispondenza del cuscinetto di losca per quanto riguarda la massima sollecitazione da momento flettente e da momento torcente e, per aste rastremate, anche in corrispondenza dell’appoggio di agghiaccio, ed in questo caso a solo momento torcente. La verifica deve essere effettuata sia in marcia avanti che indietro, le due situazioni comportano infatti sollecitazioni in grado di estremo rispettivamente di flessione e di torsione. Il dimensionamento dell’asta a sola torsione richiede il calcolo della tensione tangenziale (nominale) massima τQ [MPa] che si manifesta sulle fibre superficiali dell’asta (ossia alla distanza DA/2 dall’asse):
63
16 10πQ
A
QD
τ −= [MPa] (3.20.A)
ove Q [Nm] rappresenta il valore del momento torcente sulla sezione di verifica. Tale tensione non deve superare il valore ammissibile τamm [MPa] per il materiale:
Q ammτ τ≤ [MPa] (3.20.B)
in cui τamm viene calcolata, a partire dalla tensione normale ammissibile σamm [MPa], valutando la tensione equivalente in base al criterio dell’energia di distorsione di Von Mises:
135

L’apparato di governo, manovra e stabilizzazione
3amm
ammσ
τ = [MPa] (3.20.C)
Il dimensionamento a torsione e flessione richiede il calcolo della tensione equivalente, che viene valutata considerando oltre alla tensione tangenziale anche la massima tensione normale di flessione σM [MPa]:
63
32 10πM
A
MD
σ −= [MPa] (3.20.D)
ove M [Nm] rappresenta il valore del momento flettente sulla sezione di verifica. Poiché la tensione normale di flessione raggiunge il suo valore massimo sul diametro della sezione resistente disposto lungo l’asse di sollecitazione nei punti alla distanza DA/2 dall’asse, la tensione ideale equivalente σeq [Mpa] indotta dalla somma del momento flettente e di quello torcente si scrive come:
2 23eq M Qσ σ τ= + [MPa] (3.20.E)
Essa infine deve risultare non superiore al valore ammissibile del materiale:
eq ammσ σ≤ [Pa] (3.20.F)
Si osservi che in genere il contributo delle tensioni tangenziali da taglio si trascura. Quando però è necessario controllarne i valori massimi, si procede come di seguito illustrato. Innanzitutto si valuta la massima tensione tangenziale da taglio τT [MPa]:
62
16 103πT
A
TD
τ −= [MPa] (3.20.G)
ove T [N] rappresenta il valore del taglio sulla sezione di verifica. Poi, ricordando che il valore massimo della tensione da taglio si ha sul diametro della sezione resistente ortogonale a quello in cui si verificano le massime tensioni di flessione, si esegue la verifica prendendo in esame la tensione equivalente indotta assieme dal taglio e dal momento torcente:
( )23eq T Qσ τ τ= + [MPa] (3.20.H)
che deve risultare inferiore alla tensione ammissibile.
3.21 – La procedura IACS per la verifica strutturale
La procedura di calcolo fin qui esposta per il dimensionamento dell’asta, assieme a quella relativa al progetto delle altre parti strutturali del timone, è stata standardizzata dall’IACS (International Association of Classification
136
Cap.3 – Il progetto del timone
Societies). Tali indicazioni, raccolte come “IACS Requirements” nel documento S-10, sono state recepite dai maggiori Registri di Classificazione e costituiscono la base della normativa riguardante la verifica strutturale del timone.
In questo documento la forza idrodinamica che si scarica sulla pala è calcolata trascurando la resistenza D e considerando la sola componente di portanza L che, come noto, è quella che da il massimo contributo alla flessione sul piano di minima inerzia. Successivamente il momento torcente viene valutato in sicurezza facendo lavorare tale forza come se fosse ortogonale alla pala, ossia con braccio misurato lungo la corda del profilo all’altezza del centro di pressione. Il centro di pressione viene fissato ad una certa distanza dal bordo di attacco e ad un’altezza, lungo la campata, pari a quella del baricentro dell’area della pala.
La forza CR [N] messa a calcolo per la verifica (o il progetto) dell’asta viene espressa come:
212R S R RVC Aρ= c [N] (3.21.A)
in cui il coefficiente della forza cR [-] è tarato sulla portanza specifica massima espressa da una pala a semplice lamiera ed allungamento unitario posta nel flusso dell’elica: per tale configurazione cR = 1 esprimendo proprio la portanza specifica espressa dalla pala (si veda per confronto il valore del cL massimo in Tab.3.14.B).
Per poter considerare tutte le possibili configurazioni, il coefficiente cR viene determinato in maniera approssimata in funzione dei seguenti parametri principali della pala:
• l’allungamento geometrico λG, • il tipo di profilo idrodinamico, • le condizioni di lavoro della pala,
definendo cR come:
R 1 2 3c r r r= [-] (3.21.B)
in cui i fattori ri sono così definiti: • r1 è il coefficiente correttivo per l’allungamento di pala, rispetto al
quale risulta proporzionale • r2 è il coefficiente correttivo per la forma del profilo e varia con la
tipologia di profilo (lastra piana, profilo convenzionale, a doppia curvatura, profilo con flap),
• r3 considera infine la posizione del timone nel flusso di poppa ed in particolare tiene in considerazione se la pala si trova o meno nel flusso dell’elica.
137

L’apparato di governo, manovra e stabilizzazione
Come si può constatare applicando i valori proposti dalla norma, nel caso particolare di pala quadrata costituita da una lastra piana posta nel flusso dell’elica vale r1 = r2 = r3 = 1.
La forza idrodinamica CR va calcolata per velocità di flusso pari alla massima velocità di esercizio della nave. Esprimendo VS in nodi e ponendo ρ pari alla massa volumica dell’acqua dolce (si veda la Tab.3.7.A), dalla Eq.3.21.A si ottiene:
21 2 3132 [kn]R S RVC A= r r r [N] (3.21.C)
In base a quanto anticipato, il momento torcente QR [Nm] si valuta facendo lavorare la forza CR con braccio pari a:
• CPC /cm = 0,33 per pale senza elementi carenati di supporto lungo il bordo di attacco, sia per la marcia avanti che per la marcia indietro;
• CPC /cm = 0,25 per pale con elementi carenati di supporto lungo il bordo di attacco, limitatamente alla parte dietro al supporto. In questo caso la corda cm si riferisce al valore medio delle superficie mobile di pala che si trova dietro al supporto (tale valore diventa 0,45 per marcia indietro).
Per esempio, per un timone su corno, per la parte di pala dietro al supporto si ha un braccio pari a (0,25 – d) cm1 in marcia avanti e (0,55 – d) cm1 in marcia indietro, mentre per la parte di pala compensata si considera un braccio pari a (0,33 – d) cm2 in marcia avanti e (0,66 – d) cm2 in marcia indietro, essendo cm1 e cm2 le corde medie dell’area di pala rispettivamente dietro e sotto il corno. La forza idrodinamica viene frazionata in proporzione alle aree delle due parti. Nel caso più generico di timone su corno si ottiene perciò per marcia avanti:
( ) ( )0,25 0,33R R1 1 m1 R1 2 m2Q C d c C d c= − + − [Nm] (3.21.D)
in cui le distanze d1 e d2 vengono espresse tramite il grado di compenso calcolato sulle singole aree (si osservi che il momento delle forze idrodinamiche è qui definito positivo).
Il modello strutturale che viene utilizzato per la verifica a flessione e torsione dell’asta è quello di trave su più campate, con vincoli eventualmente cedevoli.
Per verificare l’asta a flessione, in alternativa al procedimento diretto – applicabile solamente quando il diametro è noto –, il RINA (Rules for the Classification of Ships, Part B – Hull and Stability, Ch.10, Sec.1) propone di utilizzare formule approssimate, espresse in funzione di parametri geometrici riferiti a statistiche su configurazioni tipiche. In tali norme il momento flettente di verifica viene definito come il momento della componente della
138
Cap.3 – Il progetto del timone
forza CR normale alla pala, calcolato in via approssimata considerando un angolo di abbattimento della direzione della forza pari a 30°:
cos30R R MM C b= ° [Nm] (3.21.E)
dove bM [m] è il braccio con cui lavora la forza, ossia la distanza fra il centro di pressione e l’estremità inferiore del cuscinetto di losca. Tale grandezza è valutata sulla base di dati statistici.
Il documento dell’IACS fornisce poi le relazioni per il progetto del diametro dell’asta. In esso vengono distinti due casi:
• progetto a sola torsione – corrisponde alle configurazioni in cui si può supporre che la pala sia ben sorretta da strutture che in pratica le impediscono di deformarsi e quindi di trasmettere una flessione all’asta. Si tratta delle soluzioni con appoggio continuo sul dritto del timone o su pinna, con appoggio parziale su corno con due agugliotti e con agugliotto passante (timone Simplex).
• progetto a torsione e flessione – corrisponde alle configurazioni in cui si può supporre che la pala sia libera di deformarsi e quindi di trasmettere una flessione all’asta. Si tratta delle soluzioni di pala sospesa, su corno con un solo agugliotto e su calcagnolo.
Il diametro minimo dell’asta per dimensionamento a sola torsione viene indicato con DT [mm] e viene calcolato per via diretta esplicitandolo dalla relazione (Eq.3.20.A) che lo lega alla tensione massima sulla sezione. Inoltre, considerando un coefficiente di sicurezza pari a 2 per calcolare la tensione ammissibile da quella di snervamento ed introducendo, come d’uso nei Registri, un coefficiente del materiale km [-] per generalizzare la formula per diversi materiali, si ottiene la relazione:
34,2T RD Q= mk [mm] (3.21.F)
in cui km = 1 per acciaio avente tensione di snervamento pari a 235 MPa ed assume valori prestabiliti per acciai diversi (a riguardo si vedano le norme). Si rammenta che la norma, fissando pari a 2 il coefficiente di sicurezza per la verifica, fa implicitamente riferimento alla seguente tensione ammissibile:
118amm
mkσ = [MPa] (3.21.G)
Il diametro minimo dell’asta per dimensionamento a torsione e flessione viene indicato con DTF [mm] e viene calcolato per via diretta esplicitandolo dalla relazione (Eq.3.20.E) che lo lega alla tensione massima sulla sezione. Se ne ricava un’espressione in cui esso può essere espresso in funzione del diametro DT:
139
L’apparato di governo, manovra e stabilizzazione
2
6413TF T
MD DQ
= +
[mm] (3.21.H)
in cui l’espressione sotto radice esprime un fattore di maggiorazione del diametro rispetto al caso di dimensionamento a sola torsione.
Il sopra richiamato documento S-10 propone anche un metodo approssimato per il calcolo delle rigidezze degli appoggi elastici sul calcagnolo e sul corno.
Come si può rammentare, nelle ipotesi fatte per impostare il modello per la risoluzione analitica del complesso pala–asta si è fatto riferimento ad un piano di deformazione normale alla pala. In realtà la situazione è leggermente diversa, la pala infatti, nella situazione di verifica con le massime forze applicate, deve considerarsi inclinata di un certo angolo α (angolo di barra) rispetto alla struttura di supporto ed in questa situazione i vincoli obbligano ad una deformazione non piana.
Nell’ambito della risoluzione approssimata proposta dalle norme, rimanendo valida l’ipotesi di una deformazione piana, si ipotizza che la forza scaricata sul vincolo sia normale al supporto e che la pala si deformi su tale direzione, cosicché viene proposto di utilizzare, in luogo della vera rigidezza del supporto, la rigidezza relativa alla deformazione trasversale del supporto stesso. Nel caso del calcagnolo si ottiene perciò la rigidezza del calcagnolo ρC [Nm–1]:
3
3 CC
C
EJl
ρ = [N/m] (3.21.I)
in cui E [Pa] è il modulo di elasticità normale del materiale (per l’acciaio vale 2,06⋅1011 Pa), JC [m] è il momento d’inerzia della sezione resistente della struttura di supporto calcolato rispetto all’asse neutro corrispondente allo stato di flessione indotto dalla forza ivi scaricata dalla pala, lC [m] è infine la lunghezza libera del calcagnolo.
Appare evidente che tale approssimazione conduce a calcolare una rigidezza inferiore di quella reale (infatti la forza, essendo ortogonale al calcagnolo, è in grado di estremo) e ciò comporta una verifica in sicurezza dell’asta ma non del supporto.
Una via più corretta è quella di considerare che il calcagnolo si deformi trasversalmente sotto l’azione di una forza FC inclinata dell’angolo α (la forza di calcolo è infatti ipotizzata essere normale alla pala) avente componente utile trasversale FC cosα (la componente FC sinα si trascura perché la rigidezza assiale del calcagnolo è molto elevata). In base a quanto detto lo spostamento trasversale del calcagnolo risulta pari a:
140
Cap.3 – Il progetto del timone
3
cos3C
TC
C
FEJl
αδ =
[N/m] (3.21.J)
Di tale deformazione si prende la sola componente δT cosα sul piano ideale di deformazione della pala (quello di minima inerzia della pala) e quindi per la rigidezza del calcagnolo si ottiene l’espressione:
( )2
1cos cos
CC C
T
Fρ ρ
δ α α′ = = [N/m] (3.21.K)
che rappresenta la forza da applicare sul calcagnolo nella direzione normale alla pala per ottenere uno spostamento unitario in tale direzione.
È importante osservare che con questa formulazione si lega la direzione della forza al valore della rigidezza, superando l’incongruenza implicita nella formula semplificata delle norme, in base alla quale anche con pala inclinata di 90° si otterrebbe il cedimento trasversale del calcagnolo. Con la formulazione proposta, la rigidezza del calcagnolo calcolata per α = 35° è pari a 1,5ρC .
Per la rigidezza dell’appoggio su corno il calcolo si fa più complicato poiché richiede la determinazione del cedimento d’estremità di una trave ad “L” per effetto della forza FH che si scarica sull’asse dell’agugliotto del corno. In questa analisi il corno può essere schematizzato con una pinna di altezza hH [m], che porta inferiormente un’appendice ortogonale rigida di lunghezza lH [m], ove lH rappresenta l’interasse fra la pinna e l’agugliotto.
Secondo le norme, la rigidezza del corno si calcola sotto le stesse ipotesi semplificative che hanno portato a scrivere l’Eq.3.21.I, ossia che la pala abbia una deformazione piana, che la forza scaricata sul vincolo sia normale al supporto e che la pala si deformi su tale direzione, cosicché viene proposto di utilizzare, in luogo della vera rigidezza del supporto, la rigidezza relativa alla deformazione trasversale del supporto stesso.
Nel caso del corno bisogna considerare che l’azione della forza induce sia una flessione, sia una torsione dell’elemento verticale. Per contro si suppone che la parte inferiore ortogonale che ospita l’agugliotto non si deformi trattandosi di una struttura tozza e quindi molto rigida.
Considerando una forza trasversale unitaria sull’agugliotto, la pinna si flette con spostamento d’estremità pari alla cedevolezza ϕ1 [m/N] e corrispondentemente anche l’estremità della mensola orizzontale cede della stessa quantità. La pinna inoltre si torce sotto l’azione del momento lH [Nm] – causato dalla forza unitaria che agisce sull’asse dell’agugliotto – con rotazione pari a θ1lHhH [rad], ove θ1 [rad/Nm2] è l’angolo di rotazione per
141

L’apparato di governo, manovra e stabilizzazione
unità di lunghezza della pinna indotto da un momento unitario. Ne consegue che l’estremità della mensola orizzontale per effetto della torsione cede della quantità θ1lHhH [m/N]. Infine, la cedevolezza trasversale ϕH [m/N] all’estremità dell’appendice può scriversi come:
2H 1 1 Hl hϕ ϕ θ= + H [m/N] (3.21.L)
ove ϕ1 può calcolarsi come per il calcagnolo ricordando che per definizione la cedevolezza è il reciproco della rigidezza , che si può calcolare come il reciproco della rigidezza trasversale flessionale della pinna,:
3
3H
1H
hEJ
ϕ = [m/N] (3.21.M)
in cui JH [m] è il momento d’inerzia della sezione resistente della pinna. L’angolo di torsione unitario θ1 può essere determinato con il metodo di Bredt. A tale scopo si deve considerare la sezione media della pinna, rettificarla definendo per il mantello elementi rettilinei e calcolare, per ciascun tratto della sezione stessa, la snellezza λi [-] come rapporto fra la lunghezza li e lo spessore ti del singolo elemento. L’angolo di rotazione θ1 (nell’ipotesi semplificativa di trascurare i diaframmi interni) risulta allora pari a:
24i i
1 Gλ
θ ∑=Ω
[rad/Nm2] (3.21.N)
in cui Ω [m2] rappresenta l’area circoscritta dalla linea media del mantello e G [Pa] è il modulo di elasticità tangenziale del materiale (che per l’acciaio vale circa 0,78⋅1011 Pa).
Si ottiene infine la rigidezza del corno ρH [N/m]:
322
2
1 1 1
3 4
Hi iHH 1 1 H
H HH
hl l hEJ G
ρλϕ ϕ θ
= = =+ ∑+
Ω
[N/m] (3.21.O)
il cui significato è palesemente quello della forza da applicare per ottenere uno spostamento unitario in direzione trasversale. Va solo osservato infine che le norme contenute nel documento IACS riportano la stessa formula ma con una correzione sul valore di ϕ1, che viene aumentato del 30%.
3.22 – Il dimensionamento strutturale della pala e dei supporti
Risulta evidente che per effettuare il calcolo diretto dell’asta del timone è necessario avere a disposizione gli spessori dei fasciami del mantello e dei diaframmi sia della pala sia del corno, i primi per procedere alla valutazione
142
Cap.3 – Il progetto del timone
della rigidezza flessionale della pala, i secondi per valutare la cedevolezza del supporto. A tale scopo si consiglia l’utilizzo delle formulazioni proposte dal Registro. In esse, il dimensionamento del mantello della pala viene effettuato con una formulazione che fa riferimento allo stato di collasso di snervamento dei pannelli soggetti ad un carico laterale distribuito omogeneamente, mentre per i diaframmi interni sono fornite solo indicazioni sui minimi di spessore. Ciò è giustificato dal fatto che il grigliato interno è molto robusto e non costituisce quindi una parte debole del complesso (eventualmente esso può essere studiato con un calcolo diretto).
Tale procedimento si propone di calcolare lo spessore minimo del singolo pannello elementare, a sola flessione, in due fasi successive:
• prima ipotizzando una flessione cilindrica del pannello, analizzata utilizzando come modello una strisciolina di fasciame estratta parallelamente al lato più corto;
• poi ripristinando la congruenza della deformazione della strisciolina tramite l’uso di un coefficiente correttivo che tenga conto della presenza dei vincoli sui lati corti del pannello. In questo modo si riduce il valore dello spessore minimo del pannello, infatti il supporto sui lati corti fa aumentare la resistenza del pannello poiché riduce la deformazione di flessione e le correlate tensioni.
In base a tale considerazioni, per il dimensionamento dei mantelli è necessario definire prima la collocazione dei diaframmi; si può procedere poi al calcolo degli spessori di entrambi.
I diaframmi vanno disposti in modo da formare un robusto grigliato di travi ortogonali ed in modo tale da definire – sui mantelli – pannelli elementari ad allungamento il più possibile prossimo all’unità, con lati di circa 600÷1000 mm, in funzione delle dimensioni della pala. In genere, all’interno della pala viene posto un diaframma verticale irrobustito sulla continuazione dell’asta, inoltre vengono osservate particolari precauzioni nel definire la struttura dei timoni su corno, infatti in essi la zona di cambio di sezione (attorno all’agugliotto del corno) diventa critica a causa delle forti concentrazioni di tensione.
Operando come sopra indicato, la tensione sui pannelli del mantello si calcola estraendo la strisciolina di fasciame e considerandola come una trave incastrata alle estremità (per continuità del carico tra pannelli limitrofi) e caricata con un carico distribuito uniformemente. Se con sf [m] la lunghezza del lato corto del pannello e con pf [Pa] la pressione sul pannello e se si fa riferimento ad un coefficiente di sicurezza pari a 1,5 , con il modello sopra illustrato si ottiene lo spessore minimo ammissibile tf [mm] del fasciame:
143
L’apparato di governo, manovra e stabilizzazione
21,5235
f f mf
p s kt = [mm] (3.22.A)
Calcolando la pressione agente come somma del battente statico e di quello dinamico si ottiene l’espressione:
Rf f
R
Cp hA
γ= + [Pa] (3.22.B)
dove con hf [m] si è indicata la profondità del pannello rispetto alla superficie del mare. Sostituendo poi nell’Eq.3.22.A si ha:
4105,5 Rf f f
R
Ct h sA
−⋅= + mk [mm] (3.22.C)
Il valore così ottenuto deve infine essere moltiplicato per il fattore correttivo β [-] per tenere conto della presenza dei vincoli sui lati corti del pannello:
2
1,1 0,5 f
f
sb
β
= −
[-] (3.22.D)
in cui bf [m] è la lunghezza del lato lungo del pannello di fasciame considerato. Allo spessore così determinato le norme aggiungono poi 2,5 mm.
Una volta definiti gli spessori e risolto il sistema di travi equivalenti, i fasciami e i diaframmi devono essere verificati agli sforzi indotti dalla flessione della pala. Il Registro fissa i valori ammissibili di tali tensioni con fattori di sicurezza che oscillano da fra 2 e 3 in funzione del tipo di tensione (normale o tangenziale) e del punto di verifica.
Per quanto riguarda il dimensionamento della pala formata da una lastra piana, non essendo ad essa richieste doti di resistenza alla flessione lungo la campata – è infatti sorretta da una robusta spalla –, ci si limita alla verifica della flessione che nasce nella direzione della corda. Ogni bracciolo va verificato a flessione assieme al fasciame ad esso associato, considerando un vincolo d’incastro sul fusto ed un carico laterale distribuito lungo la corda. In questo modo si ottiene il valore del minimo modulo di resistenza richiesto per il bracciolo.
Per quanto riguarda infine la verifica delle appendici dello scafo che costituiscono strutture di sostegno per la pala, va osservato quanto segue:
• per il corno, la zona critica è quella costituita dalla sola pinna verticale, essendo l’appendice di supporto dell’agugliotto un elemento molto
144
Cap.3 – Il progetto del timone
robusto, per questo motivo il modello è costituito da una trave rettilinea incastrata a scafo. Tale pinna è soggetta ad una flessione retta (si trascura infatti la flessione sul piano della struttura) e ad un momento torcente che nasce dall’interasse fra la pinna stessa ed il punto di applicazione della forza. Le sollecitazioni complessive da momento flettente, da taglio e da torcente devono essere confrontate con quelle ammissibili.
• per il calcagnolo il modello strutturale è semplicemente quello di una trave incastrata all’estremità prodiera, sulla quale il carico trasmesso dall’agugliotto inferiore della pala produce un sistema di caratteristiche di sollecitazione alquanto complesso. La forza eccentrica causa infatti una trazione, una flessione verticale semplice, una flessione orizzontale composta ed un momento torcente, le cui sollecitazioni complessive devono essere confrontate con quelle ammissibili. Si osservi che in genere la verifica è condotta con riferimento alle sole caratteristiche di sollecitazione trasversali e che per quanto riguarda la flessione verticale si ritiene sufficiente garantire un modulo di resistenza pari ad almeno la metà di quello relativo alla flessione orizzontale.
Si rammenta inoltre che, mentre la struttura del corno è simile a quella della pala carenata, ove la sezione – costituita da un mantello e da diaframmi verticali ed orizzontali – è cava, il calcagnolo può invece essere anche a sezione piena, in genere rettangolare.
Il dimensionamento degli agugliotti, trattandosi di elementi tozzi, viene generalmente fatto a taglio. Va però sempre controllato il valore della massima pressione scaricata nel contatto con il cuscinetto.
Per gli accoppiatoi flangiati vengono forniti i valori limite degli spessori delle flangie e del diametro di bulloni, mentre per quelli tronco–conici si danno i valori limite dei diametri e delle dimensioni esterne, oltre ai dati relativi al dado di sicurezza. Anche i collegamenti degli stessi con la struttura della pala sono oggetto di considerazioni da parte del Registro.
I cuscinetti vengono dimensionati per via diretta con riferimento alle massime pressioni ammissibili relative ai diversi materiali della boccola.
Nelle norme è inoltre contemplato anche il caso di timoni con mantello cilindrico. Queste pale hanno un doppio mantello cilindrico sostenuto da un grigliato interno formato da più anelli collegati da diaframmi. In questo caso le formulazioni di verifica strutturale sono di tipo empirico perché un calcolo diretto risulterebbe alquanto complesso in virtù del particolare sistema di forze che si scarica sui mantelli (va qui infatti considerata anche la pressione indotta dall’elica) e della complessità geometrica della struttura: i dimensionamenti sono perciò eseguiti in funzione della potenza dell’elica e del diametro della pala. In alternativa si possono eseguire solo calcoli agli
145

L’apparato di governo, manovra e stabilizzazione
Elementi Finiti, benché sia possibile costruire dei modelli piani di travi che simulino la pala e gli appoggi (in genere questi timoni sono sostenuti inferiormente da un calcagnolo collegato con braccetti alla camicia dell’asse portaelica).
Un altro caso contemplato dalla normativa è anche quello del timone–propulsore di tipo Pod (indicato come azimuth propulsion system). Per il calcolo della robustezza delle diverse parti si richiede un metodo diretto, mentre per la valutazione degli spessori minimi viene stabilito quanto segue:
• per la superficie del braccio verticale che regge la gondola, detto rudder part, si propone di usare le stesse formule di dimensionamento delle pale dei timoni convenzionali;
• per la superficie della gondola, detta pod, si indicano le formule per il dimensionamento dei fasciami dello scafo.
A ciò si aggiunge che la struttura interna di supporto va dimensionata necessariamente con calcolo diretto considerando un modello completo che comprenda tutto il complesso fino al cuscinetto di losca. Le forze con cui caricare la struttura sono, oltre alla forza peso ridotta della spinta, quelli massimi che insorgono:
• quando la nave procede alla massima velocità di crociera, ottenuti valutando le forze che nascono al variare dell’angolo di barra fino all’angolo massimo che in navigazione è prossimo ai 35°;
• quando la nave procede a velocità ridotta ed il timone propulsore è manovrato fino all’angolo limite (oltre il quale non può andare per la presenza di scontri di fine corsa);
• quando si esegue la manovra di arresto con l’inversione del verso di rotazione dell’elica;
• quando si esegue la manovra di arresto con la rotazione del pod di 180°. Particolare attenzione deve poi essere prestata al dimensionamento del
cuscinetto radiale di losca che deve sopportare sia il carico generato dalla rudder part, sia quello generato dall’elica.
Lo stesso IACS fornisce anche una guida (“Guidelines for Surveys, Assessment and Repair of Hull Structures”) per il monitoraggio dei punti critici della struttura del timone: ad un elenco dei potenziali punti caldi della struttura vengono fatti seguire suggerimenti per una corretta riparazione degli elementi localmente collassati. Tali punti caldi, essendo zone di concentrazione delle tensioni ed essendo l’intera struttura sollecitata a carichi ciclici, sono soggetti a rotture per fatica. Nella stessa guida vengono anche evidenziate le zone che soffrono di erosione e di usura.
I punti di più probabile innesco di cricche da fatica sono indicati come quelli in corrispondenza degli accoppiatoi e dei fasciami ad essi collegati,
146
Cap.3 – Il progetto del timone
delle lamiere della pala nella zona del bordo di attacco e, per i timoni su corno, nella zona dell’agugliotto inferiore.
L’identificazione di tali punti critici è evidentemente frutto dell’esperienza ma può essere eseguita anche con analisi statiche dirette utilizzando modelli agli Elementi Finiti molto dettagliati. Una volta valutata l’intensità degli sforzi in tali aree, la previsione della vita a fatica può essere eseguita considerando opportuni cicli di carico.
Modelli agli Elementi Finiti possono essere creati sia per lo studio del sistema di travi equivalenti (elementi monodimensionali), sia per lo studio della pala (anche con grigliati di travi), si rammenta a riguardo la guida fornita dal DNV (Strength Analysis of Rudder Rudder Arrangements) per il dimensionamento della pala e dell’asta per via diretta. Infine, modelli opportuni devono essere impostati per lo studio dei modi di vibrare dell’intera struttura.
3.23 – L’evoluzione del timone
La prima configurazione di timone su navi ad elica rispecchiava la sistemazione delle precedenti imbarcazioni a vela: la pala continuava infatti ad essere sostenuta dal dritto di poppa, che in questo caso era collegato alla chiglia da un prolungamento della stessa detto calcagnolo. In questo periodo la pala è formata da una lastra piana di forma approssimativamente semiellittica (non è né carenata, né compensata) ed è irrobustita da braccioli terminanti su un fusto posto lungo il bordo di attacco. Il sostegno è effettuato con una serie di cardini coassiali all’asta di manovra, detti agugliotti, fissati sulla pala all’estremità dei braccioli e liberi di ruotare in alloggiamenti, detti femminelle, ricavati sul dritto di poppa. Il collegamento all’asta (detta anche miccia), quando questa non è tutt’uno con il telaio della pala – ossia un solo pezzo di fusione –, è effettuato con accoppiatoi a flangia.
Una prima modifica, atta a migliorare l’efficacia idrodinamica del timone, è stata quella di sostituire la lastra piana con un doppio mantello (carenatura). Anche il dritto di poppa è stato poi carenato per creare un profilo idrodinamico continuo con la pala.
L’utilizzo di pale carenate, più robuste di quelle a semplice lamiera, ha permesso di ridurre il numero degli agugliotti sul dritto di poppa, senza incorrere nel rischio di sollecitare eccessivamente l’asta a flessione. Nelle configurazioni più evolute, sul dritto di poppa erano ricavati gli alloggiamenti per due soli agugliotti, posti alle estremità della campata della pala.
Esistono diverse varianti di carenatura del dritto, una interessante è quella con una carenatura non simmetrica, nella campata superiore verso un
147
L’apparato di governo, manovra e stabilizzazione
lato e in quella inferiore verso l’altro, allo scopo di ridurre le perdite causate dal flusso rotatorio dell’elica. Una soluzione ancora più elaborata è rappresentata dalla pala articolata con un flap mobile posto a proravia del dritto di poppa: il movimento della pala principale porta in rotazione il flap realizzando così un aumento della portanza (profili in cascata). Il timone è detto del tipo “Aller”) ed è anche caratterizzato dall’avere un certo grado di compenso.
Il dritto di poppa è stato poi finalmente eliminato, sostituendolo con un elemento altrettanto robusto costituito da un’asta passante, posizionata sull’asse di rotazione e collegata superiormente a scafo e inferiormente al calcagnolo: si tratta della nota configurazione “Simplex”. Tale asta rappresenta in pratica un lungo agugliotto passante all’interno della pala, cosicché il pozzo dell’elica continua a rimanere strutturalmente chiuso. Il timone di questo tipo è un timone compensato la cui asta di controllo continua ad essere sgravata anche da gran parte degli sforzi flessionali.
Una variante del timone Simplex è rappresentata dal timone del tipo “Hörtz”, in cui l’area di compenso viene sacrificata a favore di una carenatura fissa, con l’idea di fare aumentare le caratteristiche idrodinamiche per effetto della sistemazione di due profili in cascata.
L’evoluzione ha fatto successivamente registrare la scomparsa dell’agugliotto passante, ridotto a due semplici agugliotti, uno a scafo ed uno sul calcagnolo. In questo modo la pala del timone Simplex deve essere a struttura completamente portante, formata da un grigliato robusto di travi nel verso della campata e della corda, e deve avere una robustezza sufficiente sia per reggere i carichi diretti, sia per non trasmettere elevate sollecitazioni di flessione all’asta. Inoltre, con la mancanza del dritto e dell’agugliotto passante, il pozzo chiuso viene ora ad essere meno robusto.
Un’alternativa a questa soluzione è stata ottenuta eliminando i due agugliotti e trasferendo a proravia l’innesto sulla pala dell’asta di comando. L’asta, ora diritta, viene a costituire superiormente (al cuscinetto di losca) un appoggio per la pala a struttura portante, caricandosi anche a flessione. Complessivamente la sistemazione è più semplice, ma richiede una pala ed un’asta di comando più robuste.
Esistono diverse configurazioni di pala per i timoni su calcagnolo. Una variante alla pala classica è rappresentata dall’introduzione di un profilo asimmetrico sfalsato: la sagomatura, in funzione del verso di rotazione dell’elica, può riguardare il solo bordo d’attacco oppure tutta la pala. Quest’ultima può essere effettuata in maniera continua lungo la campata, come nel timone “Star”, oppure, più semplicemente, tagliando a metà altezza una pala asimmetrica e riunendo, con le concavità contrapposte, le due parti.
148
Cap.3 – Il progetto del timone
I timoni delle navi Liberty, del tipo Simplex, erano ottenuti proprio in questo modo, ma erano ancora meno elaborati, infatti erano costituiti da due semplici semi–pale simmetriche collegate una all’altra con un certo angolo di sfasatura lungo la linea della corda mediana (il timone “alla via” risultava però instabile).
Un altro esempio di ricerca di un rendimento migliore, sia del timone sia propulsivo, è rappresentato dall’aggiunta, sul mantello della pala, di un bulbo allineato con l’asse dell’elica, è questo il caso del timone “con bulbo Costa”. Grazie alla presenza del bulbo si ha un flusso più omogeneo sulla pala e una riduzione della velocità media d’ingresso sul disco dell’elica. Intervento finalizzato allo stesso scopo è quello che prevede l’inserimento fra timone ed elica di un’elica fissa oppure contro–rotante, da una parte si ottiene infatti un recupero di energia propulsiva, dall’altra un aumento dell’efficienza della pala, che lavora così in un flusso più omogeneo.
Un altro tipo d’intervento è quello teso ad aumentare l’allungamento effettivo, e quindi il rendimento idrodinamico della pala, tramite l’utilizzo di lamine trasversali di estremità poste in corrispondenza sia del coperchio, sia del fondo del timone.
La completa apertura del pozzo dell’elica è stata resa possibile dall’irrobustimento delle pale: ciò ha permesso la messa in opera di timoni sospesi, ossia senza calcagnolo, prima con asta passante, eventualmente rastremata, e poi a struttura carenata completamente portante. In questo modo l’asta viene gravata, oltre che dal momento torcente di controllo della pala, anche da un momento flettente che non viene più mitigato dalla presenza di uno o più appoggi lungo la pala stessa. Una soluzione intermedia, per ovviare al problema dell’elevato carico di flessione sull’asta, consiste nel creare un appoggio parziale lungo il bordo di attacco superiore della pala (appoggio su corno con uno o due agugliotti), oppure lungo tutto il bordo (appoggio su pinna).
L’evoluzione della tecnica navale ha condotto alla progettazione di navi con più di un’elica propulsatrice, rendendo quindi conveniente l’installazione dei timoni al di fuori del piano diametrale: la prima soluzione adottata è stata quella di timone sospeso, ma col crescere delle forze in gioco è stato necessario ancorare con più sicurezza la pala utilizzando un corno di sostegno. Nel caso di navi bielica con timone centrale su skeg, la configurazione è assimilabile a quella di timone su pinna, quando il timone non è compensato, oppure a quella di timone su corno, quando il timone è semi–compensato.
I timoni moderni, per navi mercantili o militari, sono essenzialmente di due tipi, sospeso o su corno, e solo nel caso di navi bielica con timone centrale non compensato la configurazione è quella di timone su pinna. Il
149
L’apparato di governo, manovra e stabilizzazione
timone su calcagnolo si usa ormai solo in casi particolari, per esempio sui pescherecci quando si vuole proteggere l’elica dalle reti.
Sia i timoni su corno che quelli sospesi possono avere un flap di coda per sfruttare l’effetto dei profili in cascata. Questa soluzione ha visto una prima applicazione nei timoni ideati da Lumley già per le navi a vela con il flap comandato prima da catene e poi da un perno fisso (la prima applicazione risale al 1862).
La caratteristica più attraente di questi timoni è infatti quella di avere un meccanismo semplice per il controllo del flap: il flap è incernierato alla pala e porta superiormente un’asta orizzontale che, all’altra estremità, è inserita nell’occhiello di un perno ad asse verticale. Quando la pala ruota, il flap ruota rispetto alla pala perché comandato dall’asta orizzontale che, pur traslando nell’occhiello, è obbligata a passare per l’asse del perno. In tal modo l’angolo di rotazione del flap è legato a quello della pala, usualmente in maniera tale da far ruotare il flap con un’amplificazione di 2,5 , cosicché per i 35° di barra della pala si hanno circa 90° di angolazione assoluta sul flap. Il timone viene commercializzato con il nome dell’azienda produttrice (per esempio sono diffusi quelli della ditta “Becker”).
Una più recente e meno fortunata applicazione è quella che prevede l’uso del flap per facilitare la rotazione della pala piuttosto che per aumentare la portanza della pala stessa (timone “Flettner”). Tali timoni, non più usati, avevano un comando indipendente per il flap, che li rendeva però delicati perché il sistema di comando passava obbligatoriamente nell’asta. Essi diventavano inoltre ingovernabili per flusso proveniente da poppa.
Un’interessante combinazione delle soluzioni sopra esposte – relative al miglioramento dell’efficienza propulsiva e dell’efficienza della pala oltre che alla razionalizzazione della configurazione strutturale – è quella offerta dal timone “Wichmann”, commercializzato ora dalla Wärtsilä sotto la denominazione “PropacRudder”. Si tratta di un timone semi–compensato su corno, con flap di coda e con un bulbo “Costa” che costituisce un tutt’uno con il mozzo dell’elica. Ai vantaggi idrodinamici derivanti dalla morfologia della pala si aggiunge perciò quello di avere un appoggio inferiore della pala molto più rigido rispetto al semplice corno – il pozzo dell’elica risulta infatti parzialmente chiuso – con la conseguente riduzione delle vibrazioni e delle sollecitazioni statiche trasmesse all’asta, e perciò con la possibilità di ridurre il diametro della stessa.
150
Cap.3 – Il progetto del timone
APP. 1 – Elenco dei simboli
α [°] angolo di attacco al timone αλ [°] angolo di attacco modificato per effetto di λ
αTF [°] angolo di inclinazione del flap β [-] fattore di correzione per il calcolo di tf χL [-] coefficiente di densità di portanza δP [m] cedimento nel generico punto P della trave δT [m] cedimento trasversale del calcagnolo δVa [ms–1] velocità del flusso indotta da α lungo la corda δVA [ms–1] incremento totale di velocità della scia dell’elica ∆p [Pa] valore assoluto della depressione sul profilo ∆pM [Pa] valore assoluto della depressione massima sul profilo ϕ [°] angolo di abbattimento della forza F ϕ1 [mN–1] cedevolezza a flessione della pinna ϕH [mN–1] cedevolezza a flessione del corno λ [-] allungamento effettivo della pala λG [-] allungamento geometrico della pala Λ [°] angolo di abbattimento medio della pala ΛLE [°] angolo di freccia al bordo di attacco Ω [m2] area racchiusa dalla sezione resistente del corno
µ [kg m–1s–1] viscosità dinamica µF [-] coefficiente di frizione ν [m2s–1] viscosità cinematica θ1 [rad m–2N–1] angolo di torsione unitario ρ [kg m–3] massa volumica ρC [Nm–1] rigidezza del calcagnolo σamm [MPa] tensione normale ammissibile σeq [MPa] tensione equivalente σM [MPa] massima tensione normale da flessione τamm [MPa] tensione tangenziale ammissibile τQ [MPa] massima tensione tangenziale da torsione τT [MPa] massima tensione tangenziale da taglio
AF [m2] area della parte fissa del timone AL [m2] area della superficie di vela AM [m2] area della parte mobile del timone AO [m2] area del disco dell’elica APD [m2] area del piano di deriva della nave AR [m2] area del timone ARE [m2] area della pala esposta al flusso dell’elica ARF [m2] area della pala a proravia dell’asse di rotazione
151
L’apparato di governo, manovra e stabilizzazione
ATF [m2] area del flap del timone b [m] campata della pala bf [m] lunghezza del lato lungo del pannello di fasciame bm [m] campata media della pala bM [m] distanza fra il CP della pala ed il cuscinetto di losca B [m] larghezza della nave c [m] corda della pala c [-] generico coefficiente idrodinamico cm [m] corda media della pala cp [-] coefficiente di pressione cr [m] corda della pala alla radice ct [m] corda della pala all’apice cB [-] coefficiente di pienezza della nave cD [-] coefficiente di resistenza cD0 [-] coefficiente di resistenza all’angolo di attacco nullo cF [-] coefficiente della forza totale cL [-] coefficiente di portanza cN [-] coefficiente della forza normale cQ [-] coefficiente del momento torcente cR [-] coefficiente idrodinamico della forza CR cY [-] coefficiente di efficacia del timone CR [N] forza per la verifica dell’asta secondo IACS CT [-] coefficiente di spinta dell’elica CPC [m] distanza del centro di pressione dal bordo di attacco CPS [m] distanza del centro di pressione dallo spigolo superiore d [m] distanza dell’asse di rotazione dal bordo di attacco dO [m] distanza fra la pala ed il centro del cuscinetto di losca dS [m] distanza della pala dallo scafo D [N] forza di resistenza idrodinamica DA [m] diametro dell’asta De [m] diametro dell’elica DT [mm] diametro minimo dell’asta secondo IACS DTF [mm] diametro minimo dell’asta secondo IACS E [Pa] modulo di elasticità normale F [N] forza totale sulla pala FA [N] forza assiale sulla pala FC [N] forza applicata dalla pala al calcagnolo FN [N] forza normale sulla pala FR [N] forza radiale applicata sul cuscinetto FT [N] componente utile della forza generata dal timone G [Pa] modulo di elasticità tangenziale hf [m] profondità del pannello di fasciame della pala hH [m] altezza del corno i [m] raggio d’inerzia della nave all’imbardata
152

Cap.3 – Il progetto del timone
JA [m4] momento d’inerzia dell’asta rispetto all’asse neutro JC [m4] momento d’inerzia del calcagnolo JH [m4] momento d’inerzia del corno JO [m4] momento d’inerzia polare dell’asta JP [m4] momento d’inerzia della pala rispetto all’asse neutro JPi [m4] momento d’inerzia dell’i–esimo elemento di pala k [-] fattore di proporzionalità nella formula 3.7.D kλ [°],[rad] fattore di trasformazione dell'angolo di attacco kl [-] rapporto fra l e De km [-] coefficiente correttivo della scia dell’elica km [-] coefficiente del materiale secondo IACS KE [-] fattore di correzione di VA per l’effetto dell’elica l [m] distanza fra elica e timone l [Nm–1] densità lineare di portanza lC [m] lunghezza del calcagnolo lH [m] lunghezza della mensola del corno L [N] forza di portanza LPP [m] lunghezza della nave tra le perpendicolari mλ [-] fattore di trasformazione del coefficiente di resistenza M [Nm] momento sezionale di flessione MO [Nm] momento flettente rispetto al cuscinetto di losca MR [Nm] momento flettente per la verifica dell’asta secondo IACS patm [Pa] pressione atmosferica pf [Pa] pressione sul pannello di fasciame della pala po [Pa] battente idraulico sul profilo pV [Pa] tensione di vapore q [Pa] pressione nel punto di ristagno q [N/m] carico per unità di lunghezza agente sulla trave Q [Nm] momento torcente originato sulla pala Q [Nm] momento sezionale di torsione QF [Nm] momento resistente di frizione QR [Nm] momento torcente per la verifica dell’asta secondo IACS r1, r2, r3 [-] fattori di correzione per il calcolo di cR rL [-] fattore di riduzione della portanza funzione di AM /AR RH [N] forza applicata dalla pala al corno RN [-] Numero di Reynolds RP [N] reazione vincolare nel generico punto P della trave sf [m] lunghezza del lato corto del pannello di fasciame si [-] generico parametro geometrico della superficie di pala tf [m] spessore minimo del pannello di fasciame tM [m] spessore massimo sulla corda media della pala T [m] immersione media di progetto della nave T [N] spinta dell’elica
153

L’apparato di governo, manovra e stabilizzazione
154
T [°C] temperatura T [N] forza sezionale di taglio V∞ [m/s] velocità del flusso indisturbato Vt [m/s] velocità del flusso lungo la corda indotta dagli spessori VA [m/s] velocità del flusso sul disco elica VR [m/s] velocità del flusso sulla pala VS [m/s] massima velocità di servizio della nave w [-] frazione di scia wR [-] frazione di scia al timone x [m] distanza dal bordo di attacco x0 [m] distanza dal bordo di attacco per profilo standard y [m] semispessore all’ascissa x y0 [m] semispessore all’ascissa x per profilo standard Y [N] forza trasversale di controllo YO [N] minima forza trasversale di controllo



![Thibaut MARKARIAN Vanessa HO - Alti sites · 2019-04-01 · Thibaut MARKARIAN t Vanessa HO Urgences - TIMONE Laurence CAMOIN Hématologie-CHU TIMONE dZ }u } nie ]v µ] o[ Z parine](https://img.pdfslide.tips/doc/110x75/5f35590c626c7b58c21ee516/thibaut-markarian-vanessa-ho-alti-sites-2019-04-01-thibaut-markarian-t-vanessa.jpg)

























