Embed Size (px)
Citation preview

TX テクノロジー・ショーケース in つくば 2010
■ はじめに
老化や長期の寝たきり状態による筋力の低下、脳卒中・
脳梗塞等の救命率の上昇により歩行のリハビリテーション
を必要とする人が年々増えてきている。一方で、歩行練習
をサポートする理学療法士の数は、近年急激に増加して
いるものの、十分とは言えない。結果として、ある程度の機
能回復で急性期の歩行練習を終え、機能低下を防ぐ維持
期の練習を続ける人も少なくない。 これに対して、我々はバーチャルリアリティ技術の一つ
である歩行感覚呈示装置を用いて、あらかじめ記録した
健常者の足の動きに沿って、患者の足をマニピュレータ
で直接動かすことで練習を効率的に行うシステムを開発し
た。ところで、これまで本装置による歩行練習は、平地歩
行を対象としてきた。しかしながら、実生活では地面は平
らな場所だけでなく、様々な段差が存在する。本研究では、
階段を上り下りする感覚を提示する手法を開発した。
■ システム構成
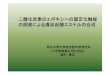
1.ハードウエア 本装置(図1)は、スライダクランク機構を介してユーザの
足を前後に移動させることで、一般的な健常者の歩行速
度である1.0 m/sの歩行速度を実現した。機構の先端には
上下動するリニアアクチュエータが取り付けられており、ユ
ーザはこのアクチュエータの先端に取り付けられた30cm四方の床板(フットパッド)に足を載せて、歩行感覚を体験
する。また、フットパッドにはユーザの体重移動を計測す
るための圧力センサを取り付けた。 2.ソフトウエア フットパッドの移動軌跡は、事前に計測した健常者の足
(かかと)の動きをモーションキャプチャシステムで記録し、
かかとの相対移動軌跡を算出する。この軌跡に沿ってフッ
トパッドを動かすことで、階段を上り下りする感覚を作り出
す。なお、本研究では、単純にフットパッドを周期的に動
かす受動歩行モードと、フットパッドの圧力センサの値か
らユーザの適切な体重移動を検出した場合に、次の足が
前に出る、上級者向けの能動歩行モードを用意した。
■ 評価実験
歩行練習中の麻痺患者の足の筋電位を計測したところ、
麻痺側の膝を伸ばす内側広筋が周期的な活動をしている
(図2)ことがわかり、能動歩行においては床を蹴る動作の
時に働く腓腹筋が活動することがわかった。これより階段
歩行の訓練にも適用可能であることが示唆された。
■ おわりに
本研究では、ユーザに階段歩行時の軌跡を提示するこ
とで、階段歩行練習が可能であることが示された。階段歩
行は、ユーザの運動負荷が高い。例えば、階段の高さを
調節することで、ユーザの運動量をコントロールして、平
地歩行の歩行練習時間(現状は1回20分)を短縮するなど
新たな練習方法への展開が期待できる。
図 1.歩行リハビリテーションシステム
図 2.麻痺足の内側広筋の筋電位変化
医療・福祉・介護
階段昇降に対応した歩行リハビリテーションシステム
代表発表者 �� ����� ����� 所 属 筑波大学 大学院 システム情報工学研究科
知能機能システム専攻
問合せ先 〒305-8573 茨城県つくば市天王台 1-1-1 第三エリア 3M 棟 2 階
TEL: 029-853-5062, FAX: 029-853-5062 [email protected]
■ キーワード: (1) 歩行リハビリテーション
(2) 歩行感覚提示装置 (3) ニューロリハビリテーション
P-50
-52-
![4 0B B t1g » B B¨BvBt Û- B14? :w:COChC}CNC_CJB.BKBM /"å H 0 Bè M ùBé • -]'Î É IBèBøB_B®B| » B B 2 !¥ ÏBé • B B¨BvBt4?" • B B B|BtBlB·B BrB B B B·BrB¢B® s6ÎB+!](https://img.pdfslide.tips/doc/110x75/5e82e22486b8c4680d3fd403/4-0b-b-t1g-b-bbvbt-b14-w-cochccnccjbbkbm-h-0-b-m-b.jpg)









![þ Î /z 4 4 BN B B B. Ö B+ 4P Ï 4Ù Î B1 · ^ þ Î /z 4 4 bn b b b. Ö b+ 4p Ï 4Ù Î b1 p bu b® b¨ bj b_ bp b1 b· b b® b b b. b® b^ b b· bx b· bx ] 4 | )d bî bñ](https://img.pdfslide.tips/doc/110x75/5b9e857109d3f26e288b92d2/b-i-z-4-4-bn-b-b-b-oe-b-4p-i-4u-i-b1-b-i-z-4-4-bn-b-b-b-oe-b.jpg)


![ø â æ ï Á Ñ ¦ ø - chukotaxi.com · ~ ¢ Â ¯ ¸ ò ù ± / ¨ Ê ´ º ¸ Þ h 1 b]bab b~bjbu$ ¬b1 ½(»b1)Îb¶bmbtb b1%i5ûb1)Îb¶$ ³ : b1 b1)Îb b bbobnbgb·b b®b.b](https://img.pdfslide.tips/doc/110x75/600eb7509d6e6929e250f93e/-h-1-bbab-bbjbu.jpg)
![大学院都市イノベーション学府£B1 Ö. B1.\6Î4? èB.BtBnB]B1B B$B BtB B1 'c.= ÿ BAB"B2BtBnB] BrB·B BU ´B BNB B+AïB-B Aî ´ (»B- 'c.= ÿ B BtBnB]BrB·B B2 I G.\6Î](https://img.pdfslide.tips/doc/110x75/5aeba0317f8b9ae5318df30e/-b164-bbtbnbb1b-bb-btb-b1-c.jpg)


![2 -ë × ¸B BL 3sBAB*B1 yBO - mhlwBaB B1 1ú1 -"õ#n PB B] öB2B_B+ +%l B1(» BU B BNB+.z oB B"(*B*B BNB B+?s ¾472 -ëB+B-BNB B+BU × ¸B BN(* øB6B B1 + ì(*B 6C( 2 -ëB1 3 p P!±B..e](https://img.pdfslide.tips/doc/110x75/5ec71b0558af25327f50293b/2-b-bl-3sbabb1-ybo-mhlw-bab-b1-11-n-pb-b-b2bb-l-b1.jpg)




![BvB~BrB¢B® B]BsB]B1 Ò &Ô 'C>%9NB Aî B]BsB]/ Ä Ò B1 ......BvB~BrB¢B® B]BsB]B1 Ò &Ô 'C>%9 NB Aî B]BsB]/ Ä Ò B1" ÷B. 0B B) Ö4ÙBnB®B B\B B®BtAøB]BsB] ò i=h ! R!ª](https://img.pdfslide.tips/doc/110x75/5ff6b162d1f40128612137bf/bvbbrbb-bbsbb1-c9nb-a-bbsb-b1-bvbbrbb.jpg)





