Embed Size (px)
Citation preview

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.1
4 - PÓRTICOS PLANOS
4.1 - INTRODUÇÃO Os pórticos planos são estruturas reticuladas que podem ser discretizadas por elementos de viga com deformação axial. Assim, a simulação do comportamento de pórticos planos depende da teoria adoptada para modelar o comportamento dos elementos de viga. As teorias correntemente utilizadas são, basicamente, a de Euler-Bernoulli e a de Timoshenko. No elemento de viga de Euler-Bernoulli admite-se que as secções transversais, normais ao eixo da viga antes da deformação, mantêm-se planas e ortogonais ao referido eixo após a deformação. Esta hipótese resulta do facto de nesta teoria se admitir que a rotação de uma secção transversal é igual à inclinação do eixo da viga (ver figura 4.1a). Neste caso a deformação por corte é ignorada, pelo que a aplicação desta teoria deve ser restrita a vigas delgadas. Na teoria de Timoshenko admite-se que as secções planas e normais ao eixo da viga antes da deformação, permanecem planas mas não necessariamente ortogonais ao eixo da viga (ver figura 4.1b). Desta forma é possível simular o comportamento de vigas em que não é desprezável a deformação por corte.
l1
2l , ul 2
1ll , u1
1ldu1dl
Normal à superfície médiaapós a deformação
Inclinação do eixo da viga (a)
1l
2ll , u2
1l
Inclinação do eixo da viga
Normal à superfície médiaapós a deformação
1l , u
Deformação admitida
Deformação real
(b)
Figura 4.1 - Deformação de um elemento de viga segundo a teoria de Euler-Bernoulli (a) e de Timoshenko (b).

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.2
Na figura (4.1) i é o referencial local da barra. Note-se que no caso dos pórticos as equações de equilíbrio de cada barra são estabelecidas no referencial local da barra. A matriz de rigidez e o vector das forças nodais equivalentes são obtidas no referencial local da barra, sendo em seguida convertidos para o referencial global xi da estrutura e assemblados na matriz de rigidez e no vector das forças nodais equivalentes da estrutura, EK e EQ , respectivamente.
4.2 - ELEMENTO DE VIGA DE EULER-BERNOULLI COM DEFORMAÇÃO AXIAL A teoria de Euler-Bernoulli admite as seguintes hipóteses:
i) Os deslocamentos verticais 2
u de todos os pontos de uma secção transversal qualquer são pequenos, quando comparados com a altura da viga, e são iguais ao respectivo deslocamento do eixo da viga;
ii) O deslocamento lateral,
3u é nulo ( ver Figura 4.2 );
iii) Secções transversais planas e normais ao eixo da viga antes da deformação mantêm-se
planas e ortogonais ao referido eixo após a deformação.
eixo da barra
L
h
Ml3
2lfF
2l
2u l
l2
1l , u l1
3l
l3θ
2l
l2u
1 1ll , uO ≡
3θ l
h
l2
1ll , u13l , θ l3
B
A
B'
A'1
u l
B''B'''
A''
B para B': deformação axialB' para B'' e B'' para B''': deformação por flexão e corte
Figura 4.2 - Deformação axial de um elemento de viga segundo a teoria de Euler-Bernoulli.

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.3
4.2.1 - Campo de deslocamentos Tendo em conta as hipóteses admitidas na teoria de Euler-Bernoulli, o campo de deslocamentos de um ponto qualquer da viga define-se por intermédio das seguintes relações (ver também Figura 4.2), )0,0,()0,0,(),,( 3212321321 311
==−=== θuu )0,0,(),,( 321321 22
===uu (4.1a) 0),,( 3213
=u , ou, mais simplesmente, )()(),,( 121321 311
θ−=uu )(),,( 1321 22
uu = (4.1b) 0),,( 3213
=u , em que
1u e
2u são os deslocamentos de um ponto do eixo da viga segundo as direcções de
1 e 2 , respectivamente. Devido à hipótese iii), a rotação 3
θ de (4.1) é igual à inclinação da
tangente ao eixo da viga deformada (ver Figura 4.1a), pelo que,
1
2
3 ddu
=θ (4.2)
1
22
11 ddu
uu −= . (4.3)
4.2.2 - Extensões A única componente não nula do tensor das extensões é a devida à variação de comprimento das fibras paralelas ao eixo da viga, pelo que,
1
1
1 ddu
=ε . (4.4)
Substituindo (4.3) em (4.4) resulta,
21
2
21
21
1 dud
dud
−=ε (4.5)
ou

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.4
fa εεε +=1
(4.6a) em que
1
1
dud
a =ε (4.6b)
é a extensão por deformação axial e
21
2
222
dud
ff −=−= εε (4.6c)
é a extensão por flexão.
4.2.3 - Tensões e esforços Se a única componente não nula do tensor das extensões é
1ε , então
1σ será a única
componente não nula do tensor das tensões,
11εσ E= (4.7)
em que E é o módulo de elasticidade do material. Substituindo (4.5) em (4.7) resulta
21
2
21
21
1 dud
Edud
E −=σ (4.8)
ou fa σσσ +=
1 (4.9a)
em que
1
1
dud
Ea =σ (4.9b)
é a tensão devida à variação de comprimento do eixo da viga e,
21
2
22
dud
Ef −=σ (4.9c)
é a tensão devida à flexão da viga. O esforço axial resulta da integração de (4.9b) na área da secção transversal do elemento,

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.5
aA
a EAdud
EAdAN εσ === ∫1
1
1. (4.10a)
Por sua vez o momento flector obtém-se integrando, na secção transversal da viga, o momento em relação à superfície média da viga, provocado pela tensão
1σ ,
3
2
21
13
2
2/
2/
222
1
2
2
2/
2/21
2
21
2
2
IE
dbd
udE
dbd
uddud
E
dAM
h
h
h
h
A
χ
σ
−=
−=
−=
=
∫
∫
∫
−
− (4.10b)
em que
2
2/
2/
223
dbIh
h∫
−
= (4.11)
é a inércia da secção transversal da viga, em relação ao eixo 3 , e b é a largura dessa secção, e
21
22
dud
f == χε (4.12)
é a curvatura do eixo da viga. Na figura 4.3 representa-se a convenção de sinais positivos para as tensões e esforços.
(l )3l1
2l
eixo dabarra 3lM1Nl
σa σf
+=
σfσa
Figura 4.3 – Convenção de sinais positivos para as tensões e esforços.

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.6
4.2.4 - Expressão do princípio dos trabalhos virtuais Considere-se um elemento de viga de volume V solicitado por forças generalizadas proporcionais à sua massa
VQ , forças generalizadas distribuídas por unidade de
comprimento, L
Q , e forças generalizadas aplicadas em pontos do seu domínio p
Q . Sob este
carregamento o corpo sofre extensões e deslocamentos virtuais, εδ e Uδ , respectivamente, pelo que, pela aplicação do princípio dos trabalhos virtuais, o trabalho interno é igual ao trabalho externo realizado durante a deformação virtual do elemento, i.e.:
p
T
LL
T
VV
T
V
T QUdLQUdVQUdVeee
δδδσεδ ++= ∫∫∫)()()(
(4.13)
em que
( )
( )
( ) 1
12222
121
2
21
21
2
21
)(int
)(3
)( )(
21
)( )(
21
)(11
)(
)(
dIEAE
ddAEEEE
ddAd
uddud
Ed
udd
ud
dV
dVW
e
e e
e e
e
e
Lffaa
L Affaffaaa
L A
V
V
Te
∫
∫ ∫
∫ ∫
∫
∫
+=
+−−=
−
−=
=
=
εδεδεδε
εεδεεδεδεεδε
δδ
σεδ
σεδδ
(4.14)
é o trabalho interno de deformação virtual realizado durante as extensões virtuais
1δε . O
termo ( ) 1
)(
dEAeL
aa∫ εδε (4.15a)
representa a rigidez extensional do elemento e o termo, ( ) 1
)(3
dEIeL
ff∫ εεδ (4.15b)
representa a rigidez à flexão do elemento. Os termos da direita da igualdade (4.13),
pT
LL
T
VV
T QUdLQUdVQUee
δ+δ+δ ∫∫)()(
(4.16)
traduzem o trabalho externo realizado durante os deslocamentos virtuais Uδ , em que

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.7
=
02
1
x
x
Vgg
Q ρρ
, (4.17)
sendo ρ a massa por unidade de volume do material que constitui o elemento e
1xg , 2xg a
aceleração da gravidade segundo os eixos x1 e x2 do referencial global (ver Figura 4.4).
2l
x 1g
g2x
32
1
(1) (3)
(2)
3ll1
2l
l 3l 2l1
(x )3
2x
4
3l
l1
x 1
Figura 4.4 – Componentes da aceleração da gravidade em pórticos planos.
Por sua vez
=
3
2
1
mff
QL
(4.18)
é o vector das forças generalizadas distribuídas por unidade de comprimento em barras, sendo
1f e
2f as forças distribuídas por unidade de comprimento segundo os eixos 1 e 2 , e
3m
o momento distribuído por unidade de comprimento em torno do eixo 3 (ver Figura 4.5).
lm3
f l2
1f l
4
32
1
(1) (3)
(2)
3l
2l
l13l
l1
2l
l 3l 2l1
(x )3
x 1
2x
Figura 4.5 – Forças distribuídas por unidade de comprimento.

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.8
O vector
Px
x
x
p
MFF
Q
=
3
2
1
(4.19)
representa as forças generalizadas aplicadas num ponto P, sendo
1xF e 2xF as forças segundo
os eixos x1 e x2, e 3xM é o momento segundo x3 (Figura 4.6).
x 2
3(x )
(2)
(1)
1
2
1x4
(3)
32 xF1
B x1F B
A
2A xF23 xF
33 xM
M C x3C
Figura 4.6 – Forças generalizadas aplicadas em pontos da estrutura.
4.2.5 - Discretização em elementos finitos de dois nós Analisando as parcelas da expressão (4.14) dos trabalhos virtuais verifica-se que o trabalho interno de deformação é a adição do trabalho por deformação axial
( )
( )∫
eL
ddud
EAd
ud1
11
11δ
(4.20)
tratado nos capítulos anteriores, com o trabalho por flexão,
( )
( )∫
eL
dd
udEI
dud
121
2
21
222
δ. (4.21)
O comportamento por deformação axial é simulado pela formulação descrita nos capítulos anteriores, enquanto o comportamento à flexão será apresentado numa próxima secção. Na parcela de trabalho interno por deformação de flexão, (4.21), existem segundas derivadas da flecha
2u . Por este facto, deve-se utilizar elementos de continuidade de classe C1 de forma
a garantir-se quer a continuidade dos deslocamentos quer da sua derivada (ver secções 3.2 e 3.6.3).

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.9
O elemento de viga mais simples de classe C1 é o dois nós representado na figura 4.7
2l
1l1 2 3 4 i j
i j
u i l2 2j lu
3i lθ = 2i ldudl1 1dl
duθ =
3
2j lj l
L(e)
Numeração
Local Global
1, 2 i, j
2l 1u 2l iu
1
l 1
dldu
2 1
l i
dldu
2
2l 2u 2l ju
1
l 2
dldu
2 1
l j
dldu
2
i j
l = 0i 1 l = Lj 1
1l
(e)
-1 +1
1s
1 N 11f (s )1
1(s )f12N
45º
1(s )f21N 1
22 45ºN f (s )
Figura 4.7 - Elemento de viga de Euler-Bernoulli de dois nós. Graus de liberdade e funções de forma hermitícas na simulação do comportamento à flexão. A continuidade das primeiras derivadas obriga a tomar como grau de liberdade a rotação,
12ddu . Assim, cada nó genérico i tem dois graus de liberdade
2iu e 12ddui , pelo que,
cada elemento tem quatro graus de liberdade. Desta forma, o campo de deslocamentos, 2
u , fica perfeitamente definido pela função cúbica seguinte,

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.10
314
2131211)(
2ssssu α+α+α+α= (4.22a)
ou
[ ]
αααα
=
4
3
2
1
31
2111 1)(
2ssssu (4.22b)
ou ainda α= Ssu )( 12
. (4.22c) Derivando (422a) obtém-se,
214132
1
322 ssds
duααα ++= . (4.23)
Na secção 3.3 verificou-se que no caso de um elemento de dois nós ou de um elemento de três nós, com nó intermédio ao centro,
1
11
2dsLdsJdx
=
=. (4.24)
Além disto, verificou-se ainda que
1
1
1
1
1
1
dsdx
dxdu
dsdu
= . (4.25)
Substituindo (4.24) em (4.25) e passando u1 para
2u e x1 para 1 obtém-se,
1
1
1
11
2
22
2 dduL
dsd
ddu
dsdu
=
=. (4.26)
As constantes αi de (4.22) calculam-se substituindo em (4.22) e (4.23) os valores de
2u e de
12dsdu nos nós do elemento, resultando:

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.11
24322
1
2
11
34
232121
24321
1
1
11
34
232111
)1(3)1(222
)1()1()1()1(
)1(3)1(222
)1()1()1()1(
3
2
1
2
22
3
2
1
2
22
++++===
++++++==+=
−+−+===
−+−+−+==−=
+=
−=
αααθ
αααα
αααθ
αααα
Ld
duLds
du
usu
Ld
duLds
du
usu
s
s (4.27a)
ou
αααα
−
−−
=
θ
θ
4
3
2
1
2
2
1
1
3210111132101111
2
2
3
2
3
2
Lu
Lu
(4.27b)
ou ainda
αCUe
f =)(ˆ (4.27c)
em que )(ˆ e
fU é um vector que inclui os graus de liberdade de flexão do elemento. De (4.27c) resulta,
)(1 ˆ e
fUC −=α (4.28a) em que,
−
−
−−−
−
=−
4/14/14/14/1
4/104/10
4/14/34/14/3
4/12/14/12/1
1C . (4.28b)
Substituindo (4.28a) em (4.22c) obtém-se,

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.12
[ ]
++−−−+
+−−+−=
−
−
−−−
−
=
= −
3
2
3
2
3
2
3
2
2
2
2
1
1
31
211
311
31
211
311
2
2
1
1
31
211
)(11
41
41
41
41
241
43
21
41
41
41
41
241
43
21
2
2
4/14/14/14/1
4/104/10
4/14/34/14/3
4/12/14/12/1
1
ˆ)(
θ
θ
θ
θ
u
u
sssLsssssLss
Lu
Lu
sss
UCSsue
f
(4.29a)
ou
( )
=
3
2
3
2
2
2
2
1
1
222112111 22θ
θu
u
NLNNLNsuffff (4.29b)
ou ainda [ ]( ) )(
2
ef
ef UNu = (4.29c) em que [ ]( )efN é a matriz das funções de forma do elemento de viga de dois nós, representadas na Figura 4.7, e designadas de funções de forma Hermitianas (ou do elemento de viga Hermítico de dois nós). As componentes de [ ]( )efN definem-se por intermédio das relações seguintes,
++−−==
−+=
+−−==
+−=
)1(41
22
)32(41
1(41
22
)32(41
31
2112222
31121
31
2111212
31111
sssLNLN
ssN
sssLNLN
ssN
ff
f
ff
f
(4.30)
sendo f
ijN a função de forma correspondente ao grau de liberdade j do nó i, relativa ao campo de deformação por flexão. Repare-se que a derivada de f
iN 1 com i=1,2 é nula no nó i, que fiN 1 com i=1,2 tem valor
unitário no nó i e nulo no outro nó, que fiN 2 com i=1,2 tem valor nulo no nó i e que a

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.13
derivada de fiN 2 com i=1,2 tem valor unitário em i e nulo no outro nó (acompanhar esta
exposição analisando a forma as funções representadas na Figura 4.7). A inclinação do eixo da viga obtém-se derivando (4.29),
++−−
+−−+−=
==
12
2
11
1
211
21
211
21
11
1
11
/
/43
21
41
243
43
43
21
41
243
432
2
2
2
2
2
222
dduu
dduu
ssLsssLsL
Ldsdu
dds
dsdu
ddu
.(4.31)
Por sua vez, a curvatura da viga obtém-se derivando (4.31) resultando,
[ ]( )
+−
+−=
=
=
=
+
=
=
=
12
2
11
1
11112
)(21
2
2
21
2
2
2
1
121
2
1
1
1
1
11
1
1
1
1
11
1
1
1121
2
/
/23
21
223
23
21
2234
4
4
0
2
2
2
2
2
2
2
2
22
dduu
dduu
sLssLsL
UdsNd
L
dsud
L
dds
dsud
dds
dds
dsdu
dsd
dds
dds
dsdu
dsd
dds
ddu
dsd
dud
ef
ef
(4.32)
pelo que

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.14
( ) ( )
( )
)(112112
21
222
221
212
221
122
221
112
2
21
2
316316
4444
2
ef
ef
ffff
ef
ef
f
UsLL
sL
sLL
sL
UdsNd
LdsNd
LdsNd
LdsNd
L
UB
dud
+−+−=
=
=
=
= χε
(4.33)
em que ( )e
fB é a matriz de deformação por flexão do elemento. Para se incluir o trabalho por deformação axial verifique-se que, ( ) )(ee
aa UB=ε (4.34) em que
( ) [ ]
−=
=
=
001001
002002
0000
1
2
1
1
21
LL
dsdN
LdsdN
L
BBBaa
aae
a
(4.35)
é a matriz de deformação axial, em que aN1 e aN 2 são as funções de forma nos nós 1 e 2, representadas em (3.10). Por sua vez a extensão por flexão pode ser obtida por intermédio da seguinte relação ( ) )(ee
ff UB=ε (4.36)
( )
+−+−= 112112
31603160 sLL
sL
sLL
sL
B ef (4.37)
é a matriz de deformação por flexão e
=
1
222
1
111
)( 2
21
2
21 ddu
uud
duuuU e (4.38)
são os graus de liberdade do elemento de dois nós. Substituindo (4.34) e (4.36) em (4.14) resulta,
( )[ ] ( ) ( )[ ] ( )( )∫+
−+=
1
1
)(1
)()(int 23
eef
Tef
ea
Tea
ee UdsLBEIBBEABUWT
δδ (4.39)

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.15
pelo que a matriz de rigidez do elemento fica
( )
( )
)(
22
2323
22
2323
1
1
1
1111211112
112214112
214
22
11121
2
1121
112214112
214
22
1112112
1
12
1
12
1
1
)(
3333
3333
3333
3333
3
460
260
6120
6120
0000
260
460
6120
6120
0000
3131316031313160
316360316360
0000
31316310316310
316360316360
0000
2
231603160
31
60
31
60
001001
00
100
1
e
e
e
e
U
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEA
LEA
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEA
LEA
Uds
sLL
sLL
sLL
sL
sLL
sLL
sLL
sL
sLL
sL
sL
sLL
sL
sL
LEA
LEA
sLL
sLL
sL
sLL
sLL
sL
sLL
sLL
sL
sL
sLL
sL
sL
LEA
LEA
L
udsLsLL
sL
sLL
sL
EI
sLL
sL
sLL
sL
LLEA
L
L
k
−
−−−
−
−
−
−
=
+
+
+−
+−
+
+
+−
+−−−
−
+−
+
−
+−
+−
+−
+−
+−
−
=
+−+−
+
−
+−+
+
−
−
=
∫
∫
+
−
+
−
.(4.40)
Por sua vez, as parcelas afectas ao trabalho virtual das forças exteriores fica,
( )[ ] ( )[ ]
++=
++=
∫∫
∫∫+
−
+
−PL
Te
V
Tee
P
e
LL
T
LV
Teext
QdsLQNdsLAQNU
QUdQUdAQUW
T
T
ee
1
11
1
11
)(
)(11
)(
22
)()(
δ
δδδδ
(4.41)
em que

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.16
( )[ ]
=
ff
ff
a
ff
ff
a
Te
NNNN
NNNNN
N
N
'2222
'2121
2
'1212
'1111
1
00
0000
00
(4.42)
é a matriz das funções de forma correspondentes à deformação axial e de flexão. Em (4.42)
fN ' são as derivadas de fN , estabelecidas em (4.31) Constata-se que a matriz de rigidez deduzida no passo anterior é igual à determinada na convencional teoria das estruturas. Isto deve-se ao facto da expressão polinomial da flecha no elemento hermítico de dois nós (equação (4.29)) coincidir com a que se obtém integrando a equação diferencial de equilíbrio de uma viga submetida a forças nos nós. O exemplo seguinte pretende esclarecer este ponto. 4.2.6 – Exemplos de aplicação
Exemplo 1 Obter a equação do campo de deslocamentos de um elemento de viga por integração da equação diferencial de equilíbrio. Resolução Na Figura 4.8 representa-se o equilíbrio de um elemento de viga. As equações de equilíbrio no elemento de viga de comprimento 1d são,
2
3
3
2
2
1
1
0
00
Vd
dMM
ddV
F
B −=∴=
=∴=
∑
∑ (4.43)
pelo que
021
23 =
dMd
. (4.44a)
Substituindo (4.10b) em (4.44a) e tendo em atenção (4.12) obtém-se,
041
4
21
2
21
2
21
22
3
2
3
3 ==
=
dud
EId
udEI
dd
dMd
. (4.44b)

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.17
ji
l 2
l 13(l )
(e) 21
1
i
2
j
(e)
21 lu
θ1 l3
u2 l2
2 l3θ
(e)L
d l1
BA
(e)
1ld
Vl2 2V + l
3Ml M +3l+
l 2dVdl1 1dl
3ldM1dl
Figura 4.8 – Elemento de viga.
A solução para esta equação é um polinómio cúbico em 1 . ( ) 3
1421312112
aaaau +++= (4.45) em que as constantes ia são obtidas por intermédio das condições fronteira:
( )
( )
( )3
)(1
2
22
3
1
2
22
21
2)(
1
101
1)(
1
)(
)0(
θ
θ
=
===
=
==
==
=
LL
ee
e
ee
e
ddu
uLLu
ddu
uu
(4.46)
resultando o seguinte sistema de equações:

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.18
=
=
=
4
3
2
1
2
32
1
22
2
1
11
1
32101
00100001
2
3
2
2
3
2
aaaa
LLLLL
ddu
ud
duu
θ
θ. (4.47)
Resolvendo este sistema de equações obtém-se as constantes ia , que substituídas em (4.45) resulta,
1
214213
1
1121111
2
2
2
22)()()()()(
ddu
fufd
dufufu +++= (4.48)
em que
2
31
31
14
31
21
13
2
31
21
112
31
21
11
2)(
23)(
2)(
231)(
LLf
LLf
LLf
LLf
+
−−=
−
=
+
−=
+
−=
. (4.49)
Transformando (4.49) em coordenadas normalizadas verifica-se que estas funções coincidem com as funções de forma do elemento de viga Hermítico de dois nós (equações (4.30)).
Exemplo 2 Calcular os deslocamentos e as reacções da viga da figura 4.9 utilizando um elemento de viga hermítico de dois nós.
L
1l
2l , u l2
3(l , θ )l3
f l2
f Ll2
2
122lf L2
12
2f Ll22lf L
2 Figura 4.9 – Consola submetida a carga uniformemente distribuída.

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.19
Resolução Na figura 4.9 representa-se as forças nodais equivalentes à carga,
2f , uniformemente
distribuída na viga. O sistema de equações de equilíbrio da viga é o seguinte,
−
+−
+−
=
−−−−
−−
12
2
12
2
4626612612
2646612612
2
1
2
1
1
2
2
1
1
1
22
22
3
2
2
3
2
2
2
2
2
2
1
3
Lf
Lf
MLf
VLf
dduud
duu
LLLLLL
LLLLLL
LEI
. (4.50)
Como
01
11
2
2==
ddu
u , (4.51)
da resolução de (4.50) resulta
22
3
22
3
2
2 2;;
6;
8
2
3121
3
1
24
2 fLMLfVEI
Lfd
duEI
Lfu ==−=−= . (4.52)
Substituindo em (4.29b) obtém-se
)274(96
6)1(
41
28)32(
41
2)(
31
211
4
331
211
4311
1
2222211
3
2
3
2
3
2
2
22
sssEILf
EILf
sssLEI
Lfss
ddu
NLuNsu
l
ff
−++−=
−++−−+
−−+=
+=
. (4.53)
Verificar que para s1= -1, 02
=u , e para s1= 1, 3
2
2 8
4
EILf
u −= , pelo que os deslocamentos
nos nós coincidem com os obtidos com a solução exacta. Contudo, no interior do elemento a flecha não é igual à exacta, dado que a flecha exacta traduz-se por um polinómio de quarto grau, enquanto a prevista pelo MEF determina-se por intermédio de um polinómio de terceiro grau. No que se refere aos momentos flectores tem-se

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.20
( )
−=
−
−
+−+−−=
−=−=−=
1
22
3
4
112112
21
2
46
6
8
00
316316
2
3
2
3
2
3
3
2
333
sLLf
EILf
EILf
sLL
sL
sLL
sL
EI
uBEId
udEIEIM e
ffχ
. (4.54)
Verificar que para s1= -1, L f125 2
23=M e para s1= 1, L f
121 2
23−=M . Assim, o
diagrama de momentos representa-se por uma recta enquanto a solução exacta traduz-se por uma equação do segundo grau,
21)(
22
3−= L
fM .
A solução exacta e a prevista pelo MEF são comparadas na Figura 4.10.
1l
2l
f l 2
L
1s = -1/√3 s = +1/√31s1
+
2lf L2
2
12
25f Ll 2
2lf L2
12
solução exacta:
MEF:
Figura 4.10 – Diagramas do momento flector obtido de forma exacta e segundo o MEF.
Verifica-se que ambas as soluções somente são iguais em 311 −=s e 312 =s , que coincidem com os pontos de Gauss correspondentes à quadratura de Gauss-Legendre de um polinómio de segundo ou terceiro grau.

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.21
4.2.7 – Exercícios resolvidos Exercício nº 1 Discretize com dois elementos de dois nós a barra representada na Figura er_4.1. Utilizando a teoria de Euler-Bernoulli calcule: a) A matriz de rigidez da estrutura; b) O vector solicitação da estrutura; c) Os deslocamentos e as reacções; d) Os momentos nos pontos nodais; e) Constate que os momentos são exactos somente nos pontos de Gauss, s1 = 3
1± . Dados: Ec = 30 Gpa, secção com 0.3 m de largura e 0.5 m de altura.
(l , θ )
l , u
3l3
50kN/m2l2
4m
1 l1l , u
S
S
S-S
0.3m
0.5m
Figura er_4.1 – Viga a ser analisada segundo a teoria de Euler-Bernoulli.
Resolução A Figura er_4.2 representa a discretização da viga com dois elementos de dois nós.
1 2 3
(1) (2)
2m 2m
Figura er_4.2 – Viga discretizada com dois elementos de dois nós a) Cálculo da matriz de rigidez da estrutura • Matriz de rigidez de cada elemento
−
−−−
−
−
=
22
22)()(
4626
612612
2646
612612
)( 3
LLLL
LL
LLLL
LL
K eLEIe ( L(e) = 2 m )

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.22
Efectuando o espalhamento das matrizes de rigidez dos elementos, na matriz de rigidez da estrutura obtém-se,
−−−−
−−−−
−−
=
−−−−
−−−−
−−
=
1612812001212121200812320812
121202412120081216120012121212
11719
462600612121200
26802661202461200264600612612
22
222
22
)(3
LLLLL
LLLLLLL
LLLLLL
KLEIE
Vectores dos deslocamentos dos nós da estrutura: sendo
321u1 l2 u 2 l2 u3 l2
1dldu1 l2
1dldu 2 l2 3 l2
dudl1
Figura er_4.3 – Graus de liberdade.
=
=
3
2
1
21
2
1
11
1θ
uuu
ddu
=
=
3
2
1
22
2
2
22
2θ
uuu
ddu
=
=
3
2
1
23
2
3
33
3θ
uuu
ddu
os graus de liberdade dos nós 1, 2 e 3, respectivamente. b) Cálculo do vector solicitação da estrutura • Vector solicitação de cada elemento
(l )
l
3
50kN/m2
l1
2m
• M= 12
2pl e R= 2pl

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.23
NOTA: O cálculo resulta da aplicação:
1)(
1
1111
)2()1()( )()()(
JdsqsNdqNQQQ eT
L
Te
e∫∫−
====
em que
−=
=
050
3
2)(
mf
q e
é o vector das forças distribuídas no elemento e
=
ff
ff
ff
ff
T
NNNNNNNN
N
'2222
'2121
'1212
'1111
é a matriz das funções de forma do elemento de viga de dois nós de Euler-Bernoulli. Assim,
−−
−
=
67.1650
67.1650
)1(Q
−−
−
=
67.1650
67.1650
)2(Q .
Efectuando o espalhamento dos vectores solicitação do elemento no vector solicitação da estrutura obtém-se,
−
−−
−
=
67.16500100
67.1650
)( EQ
c) Cálculo dos deslocamentos:
RQUK EEE += )()()(

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.24
+−
−
−
+−
=
−
−−−
−
−−−
−
−
67.16
50
0
100
67.16
50
0
0
161281200
1212121200
812320812
12120241212
008121612
0012121212
11719
2
1
3
2
2
1
3
3
2
3
R
R
u
θ
θ
θ
Para simplificar o cálculo,
)()()()( Ef
Ef
EE UKQUK −=
−
−
=
−
−
67.16
0
100
67.16
168120
83208
1202412
081216
11719
33
2
2
1
3
2
3
θ
θ
θ
u.
Resolvendo este sistema de equações de equilíbrio obtém-se,
=
=
−=
−=
rad
rad
mu
rad
0014225.0
0
0017775.0
0014225.0
3
3
2
3
3
2
2
1
θ
θ
θ
d) Cálculo dos momentos nos pontos nodais
21
22
ddu
EIM −=
⇔+++=
32322 2222211121111)1( )( θθ ffff NuNNuNsu
232 2211121)1( )( uNNsu ff += θ
• 221
212
321
122
21
22
21 ud
Ndd
Ndd
du ff
+= θ
• ( ) ( )123
21
123
21
2422
1
122
ssLLd
Nd f
+−=+−=
• ( ) 123
1234
221
212
ssLd
Ndf
−=−=

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.25
( )( ) ( )
−−−+−= 0017775.01230014225.012
321)( 1 ssEIsM
Pontos nodais:
e) Constatar que os momentos são exactos somente nos pontos de Gauss, s1 = 3
1±
=⇒=
=⇒−=
mKNMs
mKNMs
/50.95
/86.37
3
11
3
11
4.2.8 – Exercícios para resolver 1 - Na Figura epr_4.1 representa-se um elemento de viga de Euler-Bernoulli de três nós. Deduza as funções de forma deste elemento, em coordenadas normalizadas, s1 .
==
321
s1-1 +1 Figura epr_4.1
2 – Deduza o vector das forças nodais equivalentes de um elemento de viga de dois nós de Euler-Bernoulli sujeito a momentos uniformemente distribuídos segundo o eixo 3 (ver Figura epr_4.2).
1 2
m [FL-1]
1s1
2
( )3L
Figura epr_4.2
3 - a) Determine as forças nodais no nó 2, equivalentes à acção que actua no elemento finito de dois nós de Euler-Bernoulli representado na Figura epr_4.3. b) Como procederia se a viga fosse de secção variável.
5.00 m
50 kN/m
1 2
Figura epr_4.3
=⇒+==⇒==⇒−=
mKNMsmKNMsmKNMs
/6.1161/68.660/75.161
1
1
1

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.26
4.3 - Elemento de viga de Timoshenko A teoria de Timoshenko considera as duas primeiras hipóteses da teoria de Euler-Bernoulli mais a seguinte:
iii) Secções transversais planas e ortogonais ao eixo da viga indeformada permanecem planas mas não necessariamente ortogonais ao eixo da viga ( ver Figura 4.11).
Esta hipótese representa uma maior aproximação à deformação real de vigas de altura considerável. À medida que a relação vão/altura da secção diminui as secções transversais deixam de se conservar planas após a deformação.
4.3.1 - Campo de deslocamentos Os deslocamentos de um ponto qualquer da viga obtêm-se por intermédio das seguintes expressões ( ver Figura 4.11)
0),,(
)0,0,(),,(
)0,0,()0,0,(),,(
321
321321
3212321321
3
22
311
=
===
==−===
u
uu
uu θ
(4.55)
em que
1u e
2u são os deslocamentos de um ponto do eixo da viga.
l , u1 l11lu
l , u2l2
(l , θ )3l3
θl 3
φ3l
l θ3l2
2l
Figura 4.11 – Deslocamentos num elemento de Timoshenko.
4.3.2 - Campo de extensões Devido à hipótese iii) desenvolvem-se extensões de corte na secção transversal da viga. Assim, o vector das extensões é constituído por duas componentes,

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.27
+=
γε
=ε
21
1
12
1
21
1
ddu
ddu
ddu
. (4.56)
Derivando o campo de deslocamentos e substituindo em ( 4.56) obtém-se
+
=
−+
−=
0
01
2
1
13
3
2
1
f
c
a
dd
dud
dud
εεε
θ
θε
(4.57)
em que
1
1
dud
a =ε (4.58a)
é a extensão por deformação axial,
χεθ
ε 221
23 −=−=−= ff d
d (4.58b)
é a extensão por deformação de flexão e
3
2
1
θε −=dud
c (4.58c)
é a extensão por deformação de corte. Na figura 4.12 representa-se a deformação de um elemento de viga de Timoshenko. Constata-se que
1
2
33 dud
−= θφ (4.59)
é o angulo médio devido à deformação por corte.

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.28
l , u1lu
l , u2l2
(l , θ )3l3
θl 3
φ3l
1 l1
2ldudl1
12l
dldu
Deformação admitida
Deformação real
Figura 4.12 – Deformação por corte.
4.3.3 - Tensões O vector das tensões é composto por duas componentes, [ ]Tcaf σσσ = (4.60) em que
1σ=σaf (4.61a)
é a tensão devida à deformação axial mais a deformação por flexão e
21τσ =c (4.61b)
é a tensão de corte que actua na secção transversal da viga (plano 32 ).
4.3.4 - Lei constitutiva O vector das tensões ( 4.60) relaciona-se com o vector das extensões (4.57) por intermédio da seguinte lei constitutiva,
εε
=
σσ
=σc
af
c
af
GE0
0 (4.62a)

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.29
ou
γε
=
τσ
=σ21
1
21
1
00G
E. (4.62b)
Se em (4.62b) a tensão
1σ e a extensão
1ε forem decompostas nas componentes devidas a
deformação axial e deformação por flexão obtém-se,
=
=
=
c
f
a
c
f
a
c
f
a
GEE
GE
E
εεε
εεε
σσσ
σ00
0000
'
(4.63)
pelo que
−=
−=−=
=
3
2
1
1
22
1
θσ
χεσ
σ
dud
G
EEdud
E
c
ff
a
. (4.64)
4.3.5 - Esforços Os esforços obtêm-se por integração das tensões na secção transversal da viga,
dbd
dbdVMN
b
h
h
c
f
a
b
h
h
∫ ∫
∫ ∫
−
−
−=
−=
=
2
2/
2/ 2
2
2/
2/ 2'
21
1
1
2
3
1
τσ
σ
τσ
σσ
. (4.65)
Substituindo (4.63) em (4.65) e tendo em conta (4.58b) obtém-se,

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.30
( )
=
=
−=
∫ ∫
∫ ∫
∫ ∫
∫ ∫
−
−
−
−
c
f
a
cb
h
h
fb
h
h
ab
h
h
b
h
h
c
f
Gbh
EhbEhb
Gdbd
Edbd
Edbd
dbdG
EE
a
ε
ε
ε
ε
ε
ε
εε
εσ
*
3
2/
2/ 2
2
2/
2/
22
2/
2/ 2
2
2/
2/ 2
12
. (4.66)
Assim,
=
=
c
f
a
AGEIEA
VMN
εεε
σ*
2
3
2
3
1
(4.67)
em que ( ) AhbA α== **
2. (4.68)
é a área reduzida de corte e α é um factor correctivo introduzido de forma a que o trabalho por deformação de corte, admitindo tensões e distorções constantes na secção transversal, seja igual ao trabalho real. Note-se que a distribuição real de tensões e extensões de corte numa secção rectangular não é constante, sendo parabólica para materiais isotrópicos. No anexo A1 deduz-se a expressão que determina o factor correctivo de corte. Na Figura 4.13 apresenta-se valores de α para algumas secções.
C=b/a
α=6/(7+20K )
K=C/(1+C )
2a
α =5/6 α =6/7
l 32b h t
2
2
α =0.69α =0.32
t
l2
l3
l 2
Figura 4.13 - Factor correctivo de corte para várias secções transversais.

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.31
Na figura (4.14a) e (4.14b) representam-se as tensões e os esforços que se podem desenvolver num elemento de viga de Timoshenko.
aσ fσ
= +
fσaσ
lN 1 Ml3
l2
1l3(l )
(l )3
l2
l1
τ l l1 2 l l1 2τ
Distribuiçãoaproximada
Distribuiçãoreal
(l )3
l2
l1 3lM1Nl Vl2 2lV
Distribuiçãoaproximada
Distribuiçãoreal
Momentoflector
Esforçoaxial
Esforçode corte
Figura 4.14 -Tensões (a) e esforços (b) num elemento de viga de Timoshenko
4.3.6 - Expressão do princípio dos trabalhos virtuais A expressão do trabalho virtual é igual à estabelecida em (4.13). Substituindo as expressões (4.57) e (4.62) na parcela do trabalho interno de deformação virtual obtém-se,

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.32
[ ]
( )∫
∫
∫
∫
++++=
++=
+
+=
=
)(
)(
)(
)(
00
)(int
e
e
e
e
Vc
Tcf
Tfa
Tff
Taa
Ta
c
fa
V
Tc
Tf
Ta
V c
faT
c
fa
V
Te
dVGEEEE
dVG
EE
dVG
E
dVW
εδεεδεεδεεδεεδε
εεε
δεδεδε
εεε
δεδεδε
σεδδ
. (4.69)
Convertendo o integral de volume em integral de linha, tendo em atenção a relação (4.58b) e resolvendo o integral de área resulta, ( )∫ ++=
)(23 1
*)(int
eLc
Tcf
Tfa
Ta
e dAGIEAEW εδεεεδεδεδ . (4.70a)
Substituindo (4.58) na anterior expressão,
( ) ∫
−
−++=
)(3
2
23
23
3
3111
1
*
11111int
eL
e ddud
GAd
uddd
EId
ddud
EAd
udW θδθ
δθδθδδ . (4.70b)
Note-se que em (4.69) são nulas as parcelas seguintes,
∫ ∫ ∫
∫ ∫ ∫
=
−=
=
−=
−
−
)( )(
13
)( )(
31
0
0
1
2/
2/ 211
2
1
2/
2/ 211
2
e e
e e
V L
h
haf
V L
h
hfTa
ddbdud
Ed
ddVE
ddbdd
Ed
uddVE
δθεδε
θδεδε
. (4.71)
Em (4.70) a parcela
∫∫ =)()(
1111
11 ee La
Ta
L
dAEddud
EAd
udεδε
δ. (4.72a)
representa o trabalho por deformação axial, a parcela
∫ ∫=
)( )(3
3
3
311
11e eL Lf
Tf dIEd
dd
EId
dεεδ
θδθ. (4.72b)
traduz o trabalho por deformação de flexão e a parcela
∫∫ =
−
−
)(2
)(3
2
23
21
*1
1
*
1 ee Lc
Tc
L
dAGddud
AGd
udεδεθδθ
δ . (4.72c)
representa o trabalho por deformação de corte.

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.33
4.3.7 - Elemento finito de dois nós. 4.3.7.1 - Deslocamentos Contrariamente ao elemento finito de dois nós utilizado na teoria de Euler-Bernoulli, no elemento finito de dois nós da teoria de Timoshenko os campos de deslocamentos associados aos três graus de liberdade
1u ,
2u e
3θ são independentes e de continuidade C0. Assim,
cada grau de liberdade pode ser interpolado com as mesmas funções de forma, pelo que
333
222
111
2121111
2121111
2121111
)()()(
)()()(
)()()(
θθθ sNsNs
usNusNsu
usNusNsu
+=
+=
+=
. (4.73)
em que )( 11 sN e )( 12 sN são as funções de forma do elemento de dois nós (ver Figura 4.15) definidas em (3.10 ) e
jiu é o deslocamento do nó i segundo o eixo j e 3iθ é a rotação do
nó i segundo o eixo 3 .
2 l 3θ θ 1 l 3
u2 l 221 lu
ji
l , u2 2
3(θ , u )3 1l , u1
21
1 l1u
12 lu21
21
N (s ) = 1/2(1-s )1 1 1
1 12N (s ) = 1/2(1+s )
Figura 4.15 - Elemento de viga de Timoshenko.
Em forma matricial (4.73) fica,
( ) )(
32
22
12
31
21
11
21
21
21
1
000000000000
)(
3
2
1
ee UN
uu
uu
NNNN
NNsu
u
=
=
θ
θ
θ (4.74)

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.34
em que ( )eN é a matriz das funções de forma do elemento.
4.3.7.2 - Matrizes de deformação A extensão axial definida em (4.58a) pode ser reescrita da forma seguinte (ver (3.30))
1
11
1
1
1
11
2dsud
L
dsud
dds
dud
a
=
==ε. (4.75)
Tendo em conta (4.74), a extensão axial passa a determinar-se pela seguinte relação,
( )
( ) )(
32
22
12
31
21
11
1
2
1
11 002002
eea
a
UB
uu
uu
dsdN
LdsdN
Ls
=
=
θ
θε
(4.76)
em que (ver (3.21))
( )
−=
=
001001
002002
1
2
1
1
LL
dsdN
LdsdN
LB e
a
(4.77)
é a matriz de deformação axial. Por sua vez, a curvatura do eixo da viga,
1
11
1
1
3
33
2ds
dL
dsd
dds
dd
f
θ
θθεχ
=
===. (4.78)
Tendo em conta (4.74) resulta

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.35
( )
( ) )(
32
22
12
31
21
11
1
2
1
11
200200
eef
f
UB
uu
uu
dsdN
LdsdN
Ls
=
=
θ
θε
(4.79)
em que
( )
−=
=
LL
dsdN
LdsdN
LB e
f
100100
2002001
2
1
1
(4.80)
é a matriz de deformação por flexão. Finalmente, a deformação por corte fica,
3
2
3
2
3
2
1
11
1
1
2 θ
θ
θε
−=
−=
−=
dud
L
dsud
dds
dud
c
. (4.81)
Tendo em conta (4.74) resulta
( )
( ) )(
32
22
12
31
21
11
21
21
1
11
2020
eec
c
UB
uu
uu
NdsdN
LN
dsdN
Ls
=
−−=
θ
θε
(4.82)
em que

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.36
( )
( ) ( )
+−−−−=
−−=
11
21
21
1
1
121101
2110
2020
sL
sL
NdsdN
LN
dsdN
LB e
c
(4.83)
é a matriz de deformação por corte.
4.3.7.3 - Matriz de rigidez Substituindo (4.76), (4.79) e (4.82) em (4.70a) resulta, [ ] ( )[ ] ( ) ( )[ ] ( ) ( )[ ] ( )( )∫ ++=
)(23 1
)(*)()(int
eL
eec
Tec
ef
Tef
ea
Tea
Tee dUBAGBBIEBBAEBUW δδ (4.84)
em que ( )[ ] ( )∫=
)(1
)(
eL
ea
Tea
ea dBAEBk , (4.85a)
( )[ ] ( )∫=
)(3 1
)(
eL
ef
Tef
ef dBIEBK , (4.85b)
e ( )[ ] ( )∫=
)(2 1
*)(
eL
ec
Tec
ec dBAGBk (4.85c)
são as matrizes de rigidez relativas à deformação axial, flexão e corte, respectivamente, pelo que, )()()()( e
cef
ee kkkk a ++= . (4.86) Efectuando os produtos matriciais nas expressões (4.85) e resolvendo os integrais obtém-se,
−
−
=
000000000000001001000000000000001001
)()(
ee
a LEAk , (4.87a)

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.37
−
−
=
100100000000000000100100
000000000000
)()( 3
ee
LEI
k f , (4.87b)
e
−
−−−
−
−
=
320
620
210
210
00000062
032
0
210
210
000000
22
22)(*
)( 2
LLLL
LL
LLLL
LL
LGA
ke
ec . (4.87c)
Somando (4.87a) com (4.87b) e com (4.87c) resulta,
+−+−
−−−
−
+−−+
−
−
=
320
620
20
20
000062
032
0
20
20
0000
****
****
****
****
)(
232232
2222
232232
2222
LGAL
EIGALGAL
EIGA
GAL
GAGAL
GAL
EAL
EA
LGAL
EIGALGAL
EIGA
GAL
GAGAL
GAL
EAL
EA
k e . (4.88)
Se a matriz ( )eB agregar as submatrizes ( )e
aB , ( )efB e ( )e
cB , ( ) ( ) ( ) ( )[ ]Te
cef
ea
e BBBB = (4.89) e a matriz constitutiva incluir as submatrizes associadas à deformação axial ( EADa = ), à deformação de flexão (
3EIDf = ) e à deformação de corte ( *
2GADc = ),

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.38
=
=
*2
3
000000
000000
GAEI
EA
DD
DD
c
f
a
, (4.90)
então a matriz de rigidez de um elemento pode ser obtida por intermédio da seguinte relação,
( )[ ] ( )
( )[ ] ( )∫
∫+
−=
=
1
1 1
1)(
2
)(
dsLBDB
dBDBk
eTe
L
eTee
e
. (4.91)
4. 3.8 - Efeito de "Locking" Os integrandos de todos os termos da matriz de rigidez associada à deformação axial, aK , são polinómios de grau nulo. Por exemplo, a força necessária para aplicar um deslocamento unitário segundo o primeiro grau de liberdade da barra, quando os restantes são nulos, obtém-se de,
∫
∫+
−
+
−
=
=
1
1 1
1
1 1
2
21111
dsL
EA
dsLBAEBk aaa
(4.92)
em que o valor de
1aB foi retirado de (4.77). O mesmo acontece com a matriz de rigidez associada a deformação de flexão, dado que, por exemplo,
∫
∫+
−
+
−
=
=
1
1 1
1
1 1
2
2
3
33333
dsL
EI
dsLBIEBk fff
. (4.93)
Contudo, no cálculo da matriz de rigidez associada a deformação de corte, ck , surgem coeficientes cujos integrandos são polinómios de segundo grau. É exemplo disto o coeficiente
33ck ,
∫
∫+
−
+
−
−=
=
1
1 12
1
*
1
1 1*
)1(41
2
2
2
32333
dssAGL
dsLBAGBk ccc
. (4.94)
Assim, a aplicação da integração Numérica de Gauss-Legendre no cálculo de ( )ek requer 1 ponto de Gauss (PG) para determinar ( )e
ak e ( )efk e 2 PG para calcular ( )e
ck (ver Quadro 3.1).

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.39
Para se avaliar o efeito da integração numérica no comportamento em termos de rigidez apresentada por um elemento de viga de Timoshenko vai-se estudar a consola representada na Figura 4.16. Esta consola é discretizada com um único elemento de dois nós. Neste estudo vai-se desprezar os termos associados a deformação axial, dado não existir deformação axial para o carregamento actuante.
S
S
h
1
S-S
(1)
31
l 1
L
E, A
l 2
3(l )
F
u21 l
θ 1 l 3
u22 l
2 lθ 3
Figura 4.16 - Consola discretizada com um elemento de viga de Timoshenko.
Desprezando-se a matriz de rigidez afecta à deformação axial, as equações de equilíbrio do elemento são
( ) ( )[ ] )1()1(11 QUkk cf = . (4.95)
Utilizando 1 PG e 2 PG para calcular )1(
fk e )1(ck , respectivamente, (4.95) fica,
−=
+−+−
−−−
+−−+
−
0
3262
22
6232
22
2
1
2
2
1
1
****
****
****
****
3
2
3
2
232232
2222
232232
2222
FRR
u
u
LGAL
EIGALGAL
EIGA
GAL
GAGAL
GA
LGAL
EIGALGAL
EIGA
GAL
GAGAL
GA
θ
θ (4.96)
em que R1 e R2 são a força de reacção segundo 2 e o momento de reacção segundo 3 , no nó 1. Como 0
32 11 =θ=u , resulta
−=
θ
+−
−
032
23
2
232
22
2
2**
**
FuLGA
LEIGA
GAL
GA
(4.97)

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.40
pelo que
QF
F
EIL
EIL
EIL
EIL
GAL
u
=
−
+
+=
0
31
33
332
3
2
2
23
*
2
2
γγ
θ (4.98)
em que F é a matriz de flexibilidade. Da resolução de (4.98) obtém-se
( )FEIL
GALu −
+
+γγ
=32
2 31
3
*2 (4.99)
em que
2
2 33λ
=
=γ
Lh (4.100)
sendo
hL
=λ (4.101)
o parâmetro denominado de esbelteza da viga. No caso de viga de secção rectangular
( ) 121 33
hI ×= e ( )hA ×= 165*2
. Se a consola fosse discretizada com um elemento de viga de Euler-Bernoulli a matriz de flexibilidade da estrutura seria,
=
33
33
2
232
23
EIL
EIL
EIL
EIL
F (4.102)
em que não se considera a efeito do esforço transverso. Utilizando a convencional teoria das estruturas, baseada na teoria de Euler-Bernoulli, e considerando a deformação por corte, a matriz de flexibilidade da estrutura apresenta a configuração seguinte,

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.41
+
=
33
332
2
232
23
*
EIL
EIL
EIL
EIL
GAL
F . (4.103)
Assim, o deslocamento
22u obtido em (4.102) e em (4.103) é
( ) FEILu EBsc
exacto3
2 3
3
2 −= (4.104)
no caso de se utilizar a formulação de Euler-Bernoulli sem inclusão da influência do corte, e
( ) FEIL
GALu EBcc
exacto
+−=
32
2 3
3
*2 (4.105)
no caso em que a deformação por corte foi tida em conta. Efectuando o cociente entre (4.99) e (4.104) obtém-se,
( )
( )( )34
343
3
3
1
22
2
3
3
*
2
2
3
32
2
2
++
=
+
+==
λλλ
γγϕ
EIL
EIL
GAL
uu
exactoE
. (4.106)
O valor de ϕ deveria tender para a unidade com o aumento de λ (esbelteza da viga), dado que com o aumento de λ a influência de deformação de corte diminui, pelo que
22u dever-se-ia
aproximar de ( )EBsc
exactou
22 . Contudo, tal não acontece, como se pode constatar na Figura 4.18.
Verifica-se que para vigas muito esbeltas, isto é, quando λ tende para infinito, ϕ tende para zero, dado que a solução obtida com o MEF, utilizando a integração exacta no cálculo da matriz de rigidez tende para o valor nulo. Isto significa que o elemento de viga de Timoshenko de dois nós é incapaz de reproduzir, no limite (vigas muito esbeltas), a solução que se obtém com a convencional teoria das estruturas (teoria de Euler-Bernoulli sem deformação por corte). À medida que a esbelteza aumenta ocorre um fenómeno de sobrerigidez numérica que vai aumentando com λ, até tornar a estrutura infinitamente rígida. Assim, verifica-se que o elemento de viga de Timoshenko, com integração completa (ou exacta) permite obter resultados aceitáveis apenas para valores reduzidas de λ. Um dos procedimentos para resolver este problema consiste em diminuir a influência da rigidez de corte, por intermédio de uma subintegração dos termos de )(e
cK , utilizando um

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.42
número de pontos de integração inferior ao necessário para o seu cálculo exacto. Ao subintegrar-se determinada matriz de rigidez está-se a aumentar a flexibilidade do elemento.
Figura 4.18 – Influência do nº de PG utilizados na integração da matriz de rigidiz de uma viga discretizada com
um elemento de Timoshenko. Assim, ao subintegrarem-se os termos de )(e
ck está-se a compensar a excessiva rigidez
introduzida em )(eck pelos termos de corte.
Integrando )(e
ck com um ponto de Gauss obtém-se,
( )e
e
ec
LLLL
LL
LLLL
LL
LGA
k
−
−−−
−
−
=
4242
21
21
4242
21
21
22
22)(*
)( 2 . (4.107)
Utilizando (4.107) em vez de (4.87c) no anterior exemplo, as relações (4.97) e (4.98) passam a apresentar a seguinte forma,

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.43
−=
θ
+−
−
042
2
3
2
232
22
2
2**
**
FuLGA
LEIGA
GAL
GA
(4.108a)
ou )()()( eee QUk = (4.108b) e
−
+
=
0
2
24
33
332
3
2
2
23
*
2
2 F
EIL
EIL
EIL
EIL
GAL
uθ
(4.109a)
ou )()()( eee QFU = . (4.109b) Verifique-se que F coincide agora com a expressão (4.103), excepto no coeficiente F11. Calculando
22u por intermédio de (4.109) obtém-se,
( ) FEIL
GALFFu
+−=−=
32
2 4
3
*112 . (4.110)
A relação entre este valor e o exacto, obtido com um elemento de Euler-Bernoulli (sem deformação por corte) fica,
( ) 2
2
2
2
433
2
2
λλϕ +
== EBsc
exactou
u. (4.111)
que se representa na Figura 4.18. Verifica-se que ϕ tende para 0.75 quando λ tende para infinito, pelo que a sobrerigidez devida ao corte desapareceu com a subintegração de )(e
ck . A excessiva rigidez introduzida pela integração exacta dos termos da rigidez de corte denomina-se na nomenclatura Inglesa de "Locking". Por sua vez, ao integrar-se exactamente os termos de )(e
ak e )(efk e subintegrar-se os termos de
)(eck , está-se a aplicar a denominada integração selectiva, dado que é completa nos termos de
)(eak e )(e
fk e reduzida nos termos de )(eck .

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.44
Da análise da Figura 4.18 e da expressão (4.111) verifica-se que, com um elemento a discretizar a consola, o resultado obtido não é exacto. Contudo, se a consola for discretizada com mais elementos a solução converge rapidamente para a exacta, conforme se pode constatar no Quadro 4.1.
Quadro 4.1 - Evolução do erro com a discretização da consola
Valores de λ= /h→∝ Número de elementos 1 2 4 8 16
( )EBsc
exactoEu
u
2
2
2
2=ϕ 0.750 0.938 0.984 0.996 0.996
4.3.9 – Exercícios resolvidos Exercício nº 1 Discretizando a consola representada na Figura er_4.3 em um elemento finito de três nós de Timoshenko: a) Calcule a matriz de rigidez desse elemento utilizando a integração selectiva; b) Considerando os resultados obtidos com a integração selectiva, determine os deslocamentos e os esforços para a acção aplicada na consola. c) Traçar um gráfico que relacione a flecha na consola com o parâmetro ϕ em que,
( )EBscexactou
u)(
2
2
3
3=ϕ
sendo
( )
3
2 3)(
3
3 EIFLu EBsc
exacto −=
Dados: L=10 m; E= 30 GPa; F=100 kN; A= 1×1 m2 2 3 F
1
3, IE
L Figura er_4.3 – Consola sujeita a uma força concentrada F na sua extremidade livre.
Resolução:

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.45
a) Cálculo da matriz de rigidez de um elemento de três nós utilizando a integração selectiva • Graus de liberdade do elemento de Timoshenko de três nós: 2
21u 31θ
22u 32θ
23u 33θ
11u 12u
13u 1 Campo de deslocamentos:
3333
2222
1111
3132121111
3132121111
3132121111
)()()()(
)()()()(
)()()()(
θθθθ sNsNsNs
usNusNusNsu
usNusNusNsu
++=
++=
++=
Sob a forma matricial:
=
3
2
1
3
2
1
3
2
1
3
2
1
3
3
3
2
2
2
1
1
1
321
321
321
1
000000
000000
000000
)(
θ
θ
θ
θ
u
u
u
u
u
u
NNN
NNN
NNN
su
u
Matriz de rigidez correspondente a deformação axial:
= 002002002
1
3
1
2
1
1
dsdN
LdsdN
LdsdN
LB a

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.46
+−−= 00)
21(200)2(200)
21(2
111 sL
sL
sL
B a
1
1
11
)(
2)(
dsLBEABdBEABK aTaa
L
Ta
ea
E∫∫−
==
Calculando os termos não nulos:
LEAdss
LEALdsLBEABK a
Taa 3
7)21(4
22 12
1
1
121
1
1111,1
=−== ∫∫−−
LEAdss
Ls
LEALdsLBEABK a
Taa 3
8)2(2)21(2
22 111
1
11
1
1414,1
−=−−== ∫∫−−
LEAdss
Ls
LEALdsLBEABK a
Taa 3
1)21(2)
21(2
22 111
1
11
1
1717,1
=+−== ∫∫−−
LEAs
LEALdsLBEABK a
Taa 3
164422
21
1
121
1
1444,4
=== ∫∫−−
LEAdss
Ls
LEALdsLBEABK a
Taa 3
8)21(2)2(2
22 111
1
11
1
1747,4
−=+−== ∫∫−−
LEAdsss
LEAdsLBEABK a
Taa 3
7)21)(
21(2
2 111
1
11
1
1777,7
=++== ∫∫−−
Então:
−
−−
−
=
000000000
000000000
007008001
000000000
000000000
0080016008
000000000
000000000
001008007
3LEAK a
Matriz de rigidez correspondente a deformação flexão:

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.47
=
1
3
1
2
1
1 200200200dsdN
LdsdN
LdsdN
LB f
+−−= )
21(200)2(200)
21(200 111 s
Ls
Ls
LB f
1
1
11
)(
233)(
dsLBEIBdBEIBK fTff
L
Tf
ef
e∫∫−
==
Efectuando procedimento similar ao anterior obtém-se a matriz de rigidez relativa à flexão:
−
−−
−
=
700800100
000000000
000000000
8001600800
000000000
000000000
100800700
000000000
000000000
33)(
LEI
K ef
Matriz de rigidez correspondente a deformação corte:
−−−= 3
1
32
1
21
1
1 202020 NdsdN
LN
dsdN
LN
dsdN
LBc
+−+−−−−−−= )1(
21)
21(20)1()2(20)1(
21)
21(20 111
211111 sss
Lss
Lsss
LBc
1
1
1
*1
*)(
22)(
2dsLBGABdBGABK c
Tcc
L
Tc
ec
e∫∫−
==
Elementos não nulos resultantes do produto c
Tc BB :

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.48
9,9
9,88,8
9,68,66,6
9,58,56,55,5
9,38,36,35,33,3
9,28,26,25,23,22,2
LGA
dssL
sL
LGAdsLBGABK c
Tcc
*
111
1
1
*
1*
1
1
22
2222,2 37)
21(2)
21(2
22=−−== ∫∫
−−
Seguindo o mesmo raciocínio obtém-se:
6;
3;
32;
38;
2
***
**2
9,2
2
8,226,2
2
5,2
2
3,2
GAK
LGA
KGAKL
GAK
GAK ccccc −===−==
**
***29,3
2
8,326,325,323,3 301;
6;
151;
32;
152 GAK
GAKLGAKGAKLGAK ccccc −===−==
***
29,5
2
8,56,5
2
5,5 32;
38;0;
316 GAK
LGA
KKL
GAK cccc =−===
***
29,628,626,6 15;
32;
158 GALKGAKLGAK ccc =−==
2;
37 **
2
9,8
2
8,8
GAK
LGA
K cc −==
*
29,9 152 GAK c =
Somando as submatrizes de rigidez associadas a deformação axial, de flexão e corte, obtém-se a matriz de rigidez de um elemento de três nós de Timoshenko:

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.49
+
−
+−−+
−
−
−+−−+
−−
−
*
**
***
***
*****
**
****
2
3
2
2
2
3
22
3
2
22
2
3
22
3
22
3
2
2
2
222
152
37
21
37
37
151
38
32
158
316
32
380
316
38
316
301
31
61
151
38
32
152
37
61
31
32
38
21
37
31
38
37
GAL
EI
GAL
GAL
EA
LGAL
EIGALGA
LEI
GAL
GAL
GAL
EAL
EA
GAL
EIGALGA
LEI
GALGAL
EI
GAL
GAGA
LGA
LGA
LGA
LEA
LEA
LEA
b) Cálculo dos deslocamentos:
)()()()( ec
ef
ea
E KKKK ++=
)()()( EEE QUK =
−=
+−+−
−−−
+−−+
−
0
00
152
37
21
1538
32
21
37
32
38
1538
32
158
3160
32
380
316
3
2
3
2
2
3
22
3
2
2
2
2
2
2
3
22
3
2
22
3
3
2
2
****
**
**
***
***
Fu
u
GAL
EIGAGAL
LEI
GA
GAL
GAGA
LGA
GALL
EIGAGAL
LEI
GAL
GAL
GA
θ
θ
Cálculo das características mecânicas da estrutura:
4
2*
2
08333.0
15)1(2
8333.065
111
3mI
GPaEG
mAA
mA
=
=+
=
==
=×=
ν
Resolvendo o sistema de equações de equilíbrio obtém-se:

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.50
−=
−=
−=
−=
m
mu
m
mu
0020.0
0104.0
0011.0
0027.0
3
2
3
2
3
3
2
2
θ
θ
b) Traçar um gráfico que relacione a flecha com o parâmetro ϕ :
mEIFLu exacto
E 00111.03
)(3
2
3)(
2 −=−=
Calculo do parâmetro ϕ :
4545.20011.00027.0
)( )(2
2
2
2 =−−
==exacto
Eu
uϕ (com L=10 m)
364.00011.00004.0
)( )(2
2
2
2 =−−
==exacto
Eu
uϕ (com L=5 m)
0
10
20
30
40
5 10 15 20 25
L/h
FI
Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.51
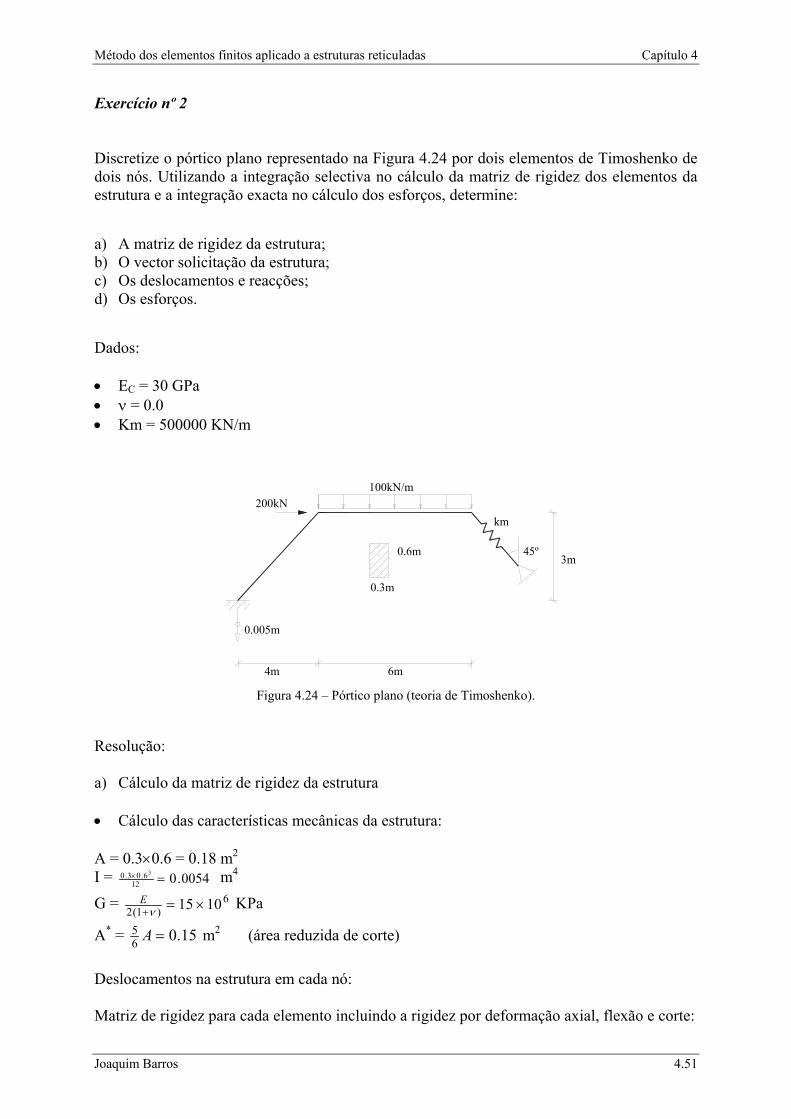
Exercício nº 2 Discretize o pórtico plano representado na Figura 4.24 por dois elementos de Timoshenko de dois nós. Utilizando a integração selectiva no cálculo da matriz de rigidez dos elementos da estrutura e a integração exacta no cálculo dos esforços, determine: a) A matriz de rigidez da estrutura; b) O vector solicitação da estrutura; c) Os deslocamentos e reacções; d) Os esforços. Dados: • EC = 30 GPa • ν = 0.0 • Km = 500000 KN/m
100kN/m200kN
km
45º0.6m
0.3m
0.005m
4m 6m
3m
Figura 4.24 – Pórtico plano (teoria de Timoshenko).
Resolução: a) Cálculo da matriz de rigidez da estrutura • Cálculo das características mecânicas da estrutura: A = 0.3×0.6 = 0.18 m2 I = 0054.012
6.03.0 3 =× m4
G = 6)1(2 1015 ×=+ν
E KPa
A* = 15.065 =A m2 (área reduzida de corte)
Deslocamentos na estrutura em cada nó: Matriz de rigidez para cada elemento incluindo a rigidez por deformação axial, flexão e corte:

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.52
(2)
g 2
3(g )
(1)
1
2
1g
3
3θ1 g
11 gu21 gu
1u2 g
32 gθ22 gu
3 g
3 g3 g
3θ
1uu 2
Cálculo da matriz de transformação, gT :
2
1
31 g 1 g
u1 g
uu1
(1)
(g )3
2l
1l3l
36.87º
Então:
−
=
3
2
1
3
2
1
100
0cossen
0sencos
αα
αα
g
g
g
−
−
=
−
−
=
100000
08.06.0000
06.08.0000
000100
00008.06.0
00006.08.0
100000
0cossen000
0sencos000
000100
0000cossen
0000sencos
αα
αα
αα
αα
gT
Rigidez da mola no referencial global:

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.53
[ ]Tmgm
mg
gm TKTK =
em que
−=
ββ
ββ
cossen
sencosmgT
−
−=
=
5.05.0
5.05.0
sensencos
sencoscos2
2
mmgm KKK
βββ
βββ ( β = - 45º )
Cálculo da matriz de rigidez do elemento 1, 2 e da mola:
[ ]Tggg TKTK ××= )1()1(
)2()2( KK g = (α=0º)
−−
−−−−
−−
−−
−−
−−−−
=
28449009000006750002780100900000675000
900000676800302400900000676800302400
675000302400853200675000302400853200
27801009000006750002844900900000675000
900000676800302400900000676800302400
675000302400853200675000302400853200
)1(gK

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.54
−
−−−
−
−
−
−
=
340200011250000334800011250000
1125000375000011250003750000
0090000000900000
334800011250000340200011250000
1125000375000011250003750000
0090000000900000
)2(gK
−
−=
250000250000
250000250000mK
Efectuando o espalhamento das matrizes de rigidez dos elementos na matriz de rigidez da estrutura obtém-se:
−
−−−−
−−
−−
−−−−
−−−
−−
−−
−−−−
=
340200011250000334800011250000000
112500062500025000011250003750000000
0250000115000000900000000
33480001125000062469002250006750002780100900000675000
112500037500002250001051800302400900000676800302400
009000006750003024001753200675000302400853200
00027801009000006750002844900900000675000
000900000676800302400900000676800302400
000675000302400853200675000302400853200
)( ggK
b) Cálculo do vector solicitação:
2
6m
l
l 3
1l
100kN/m
• M= 12
2pl e R= 2pl

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.55
−
−
−=
300
300
0
300
300
200
0
0
0
)( EgQ
(mal calculado ??????)
c) Cálculo dos deslocamentos e reacções:
RQuK EEE +=× )()()(
−
−
−=
−
−
−−−−
−−
−−
−−−−
−−−
−−
−−
−−−−
300
300
0
300
300
200
0
005.0
0
340200011250000334800011250000000
112500062500025000011250003750000000
0250000115000000900000000
33480001125000062469002250006750002780100900000675000
112500037500002250001051800302400900000676800302400
009000006750003024001753200675000302400853200
00027801009000006750002844900900000675000
000900000676800302400900000676800302400
000675000302400853200675000302400853200
3
2
1
3
3
3
2
2
2
3
2
1
3
2
1
R
R
R
u
u
u
u
u
u
Para simplificar o calculo:
)()()()( Ef
Ef
EE uKQuK ×−=× Resolvendo este sistema de equações de equilíbrio obtém-se:

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.56
=
=
=
−=
−=
=
=
=
=
radu
mu
mu
radu
mu
mu
mKNR
KNR
KNR
01047012.0
00470304.0
006034101.0
00428163.0
013949.0
0064038.0
.3.473
7.266
55.132
3
2
1
3
2
1
3
3
3
2
2
2
3
2
1
d) Cálculo dos esforços
Para um elemento de dois nós só existe 1 ponto de Gauss (s1 = 0): • Momento flector:
mKNuL
EIuL
EIM
udsdNEIEIM
mKNuL
EIuL
EIM
udsdNEIEIM
de
fs
Lf
de
fs
Lf
.3.39801047012.027000)00428163.0(27000)21)(2()
21)(2(
)(
.7.138)00428163.0(32400032400)21)(2()
21)(2(
)(
)2(
01
12)2(
)1(
01
12)1(
1
1
=×+−×−=+−=
⇔==
−=−×+×−=+−=
⇔==
=
=
ε
ε
• Esforço axial:

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.57
KNuL
EAuL
EAN
udsdN
EAEAN
KNuL
EAuL
EAN
udsdN
EAEAN
de
fs
La
de
fs
La
7.332006034101.09000000064038.0900000)21)(2()
21)(2(
)(
2.263)00324376.0(1080000)003.0(1080000)21)(2()
21)(2(
)(
)2(
01
12)2(
)1(
01
12)1(
1
1
−=×+×−=+−=
⇔==
−=−×+−×−=+−=
⇔==
=
=
ε
ε
4.3.10 – Exercícios para resolver 1- A altura da viga biencastrada representada na Figura 1 varia de forma parabólica de 2 metros em x1=0 até 1 metro em x1=10 metros. Na viga actua uma carga distribuída parabolicamente, cujos valores se representam na figura 2. Discretizando a estrutura em dois elementos de 3 nós e utilizando a teoria de Tismoshenko determine: a) a matriz de rigidez de um elemento aplicando a integração reduzida de Gauss-Legendre; b) o vector das forças nodais equivalentes à acção que actua no elemento; Dados: largura da viga=0.5 m; módulo de elasticidade do material=30 GPa.
0.5m
100 kN100 kN
200 kN
10m 10m
1.0m
1x
2x
Figura 1 2 – Admita que as barras 2 e 3 do pórtico plano representado na Figura 2 são discretizadas por um elemento finito de 3 nós e a barra 1 é discretizada por um elemento finito de 3 nós de barra biarticulada. Utilizando a formulação de Timoshenko e adoptando a integração reduzida: a) calcule a submatriz de rigidez relativa ao nó C; b) calcule as forças nodais no nó C, no referencial global, equivalentes às acções que actuam na
estrutura; c) calcule os esforços de flexão nos pontos de Gauss do elemento que discretiza a barra 2, admitindo
que os deslocamentos do nó B, C e E , no referencial global, são os seguintes:
Nó B: mux 0.01
= ; meux 046919.22
−−= ; .041632.23
radex −−=θ
Nó E meux 049258.11
−= ; meux 0623.62
−−= ; .044807.23
radex −=θ
Nó C meux 057424.51
−= ; meux 048049.12
−−= ; .047355.63
radex −−=θ
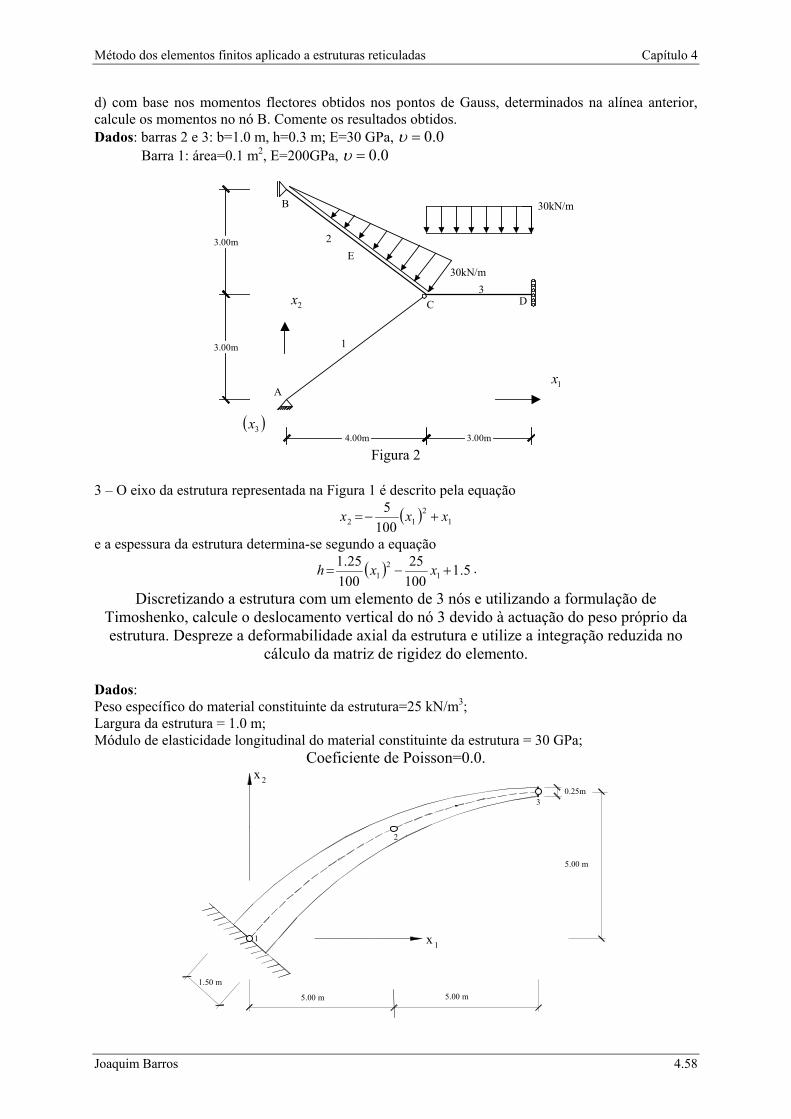
Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.58
d) com base nos momentos flectores obtidos nos pontos de Gauss, determinados na alínea anterior, calcule os momentos no nó B. Comente os resultados obtidos. Dados: barras 2 e 3: b=1.0 m, h=0.3 m; E=30 GPa, 0.0=υ Barra 1: área=0.1 m2, E=200GPa, 0.0=υ
4.00m 3.00m
3.00m
3.00m
30kN/m
30kN/m
A
C D
B
1
3
2
1x
( )3x
2x
E
Figura 2
3 – O eixo da estrutura representada na Figura 1 é descrito pela equação
( ) 12
12 1005 xxx +−=
e a espessura da estrutura determina-se segundo a equação
( ) 5.110025
10025.1
12
1 +−= xxh .
Discretizando a estrutura com um elemento de 3 nós e utilizando a formulação de Timoshenko, calcule o deslocamento vertical do nó 3 devido à actuação do peso próprio da estrutura. Despreze a deformabilidade axial da estrutura e utilize a integração reduzida no
cálculo da matriz de rigidez do elemento.
Dados: Peso específico do material constituinte da estrutura=25 kN/m3; Largura da estrutura = 1.0 m; Módulo de elasticidade longitudinal do material constituinte da estrutura = 30 GPa;
Coeficiente de Poisson=0.0.
5.00 m
0.25m
5.00 m
x 1
2x
1.50 m
3
2
1
5.00 m

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.59
Figura 3 1 – O pórtico plano representado na Figura 1 foi discretizado em 3 elementos de 3 nós. Utilizando a formulação de Timoshenko e a integração reduzida obtiveram-se os deslocamentos nos nós da estrutura apresentados no Quadro 1. a) Calcule o esforço axial num ponto de Gauss do elemento que discretiza a barra 1; b) Calcule o momento flector num ponto de Gauss do elemento que discretiza a barra 2; c) Calcule o esforço de corte num ponto de Gauss do elemento que discretiza a barra 3; d) Com base nos esforços indicados no Quadro 2, extrapole os momentos flectores para o nó 2 e os
esforços de corte para o nó 7. Dados: Módulo de elasticidade longitudinal do material constituinte da estrutura = 30 GPa; Coeficiente de Poisson=0.0; Largura das barras = 0.7 m; A variação da altura das barras é a representada na Figura 2.
100 kN/m
1
2
3
4 5 6 7
3
1
2
5.00
m
8.00 m5.00 m
Variação da altura da secção dos elementos finitos
- Elementos e 1 2
h = 0.50 m h = 0.75 m h = 1.00 m
i i+1 i+2
3- Elemento
h = 0.50 m
i+2
h = 0.75 mh = 1.00 m
i+1i
b = 0.70 m
E = 30 GPa
Figura 1
Quadro 1 *** Nodal displacements: (global coordinate system) Point number (ipoin) X1 displacement (delta-x1) X2 displacement (delta-x2) Theta-x3 rotation (delta-tx3) ipoin delta-x1 delta-x2 delta-tx3 1 0.00000000 0.00000000 0.00149995 2 0.00081408 0.00000000 0.00059338 3 -0.00200657 0.00121595 -0.00028815 4 0.00081408 0.00066868 -0.00030253 5 0.00081408 -0.00216944 -0.00225808 6 0.00047488 -0.02106080 -0.00555692 7 0.00000000 -0.03526722 0.00000000 (unidades: deslocamentos em metros e rotações em radianos)

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.60
Quadro 2 *** Resultant stresses in the Gauss points: (local coordinate system) (same sign convention for any Gauss point) Element number (ielem) Gauss point number for axial forces (igsta) Gauss point number for bending moments (igstb) Gauss point number for shear forces (igsts) Gauss point global coordinates for axial forces (gpcot_a) Gauss point global coordinates for bending moments (gpcot_b) Gauss point global coordinates for shear forces (gpcot_s) L1 axial force (Nl1) L2 shear force (Nl2) L3 bending moment (Ml3) ielem igsta Nl1 gpcot_a igsts Nl2 gpcot_s igstb Ml3 gpcot_b 1 1 -2055.62134239 1.05662433 1.05662433 1 2 -2055.62134239 3.94337567 3.94337567 1 1 127.02127549 1.05662433 1.05662433 1 2 127.02127549 3.94337567 3.94337567 1 1 189.80693341 1.05662433 1.05662433 1 2 708.36911911 3.94337567 3.94337567 2 1 0.00000000 1.05662433 5.00000000 2 2 0.00000000 3.94337567 5.00000000 2 1 169.38861820 1.05662433 5.00000000 2 2 458.06375280 3.94337567 5.00000000 2 1 123.15738629 1.05662433 5.00000000 2 2 1028.80687455 3.94337567 5.00000000 3 1 -1543.36139601 6.69059892 5.00000000 3 2 -1543.36139601 11.30940108 5.00000000 3 1 -630.94010768 6.69059892 5.00000000 3 2 -169.05989232 11.30940108 5.00000000 3 1 1257.23407740 6.69059892 5.00000000 3 2 -590.28678401 11.30940108 5.00000000 (unidades: kN, kN.m, m)
1 – A estrutura representada na Figura 1 está descretizada em 4 elementos de 3 nós de Timoshenko. a) Desprezando a deformabilidade axial das barras e utilizando a integração reduzida, calcule os
coeficientes de rigidez relativos ao nó B. b) Calcule as forças nodais equivalentes no nó B.

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.61
c) Considerando dois pontos de Gauss por elemento, calcule os esforços de flexão e de corte no elemento nº 1, sabendo que os deslocamentos dos nós deste elemento, no referencial global, são os seguintes :
Nó deslocamento segundo x1 deslocamento segundo x2 rotação segundo x3 1 0.00000000 0.00000000 -0.00084618 2 -0.00000000 -0.00091344 -0.00056319 3 -0.00000000 -0.00127759 0.00003270 d) Com base nos esforços do elemento nº 1 , determine o momento no nó A. Se os resultados não lhe
parecem aceitáveis, explique como procederia para melhorar os resultados obtidos. Dados: b=0.3 m, h=0.7 m; E=30 GPa, 0.0=υ Mola: mkNkm /000500=
100 kN
3.00
m
5.00 m 4.00 m
km = 500 000kN/m
x 3
1x
2x
1 2 3 4 5
6
7
8
9
50 kN/m
1 2
3
4
A B
C
Figura 1
1 – Discretizando a consola representada na Figura 1 em dois elementos de 3 nós de Tismoshenko, de igual comprimento, calcule:
a) A matriz de rigidez da estrutura; b) O vector das forças nodais equivalentes, admitindo que a barra está submetida ao seu
peso próprio, a forças distribuídas por unidade de comprimento de valor igual a 50 kN/m e a uma força concentrada de 100 kN aplicada na extremidade livre da consola;
c) O deslocamento vertical da extremidade livre da consola; d) As reacções; e) O momento flector e o esforço transverso no ponto de Gauss mais próximo da secção
de encastramento. Admita que os deslocamentos dos nós 2 e 3, no referencial global, são os seguintes:
Nó Deslocamento segundo x2 (m) Rotação segundo x3 (rad.) 2 -0.00820588 -0.00735665
3 -0.04257247 -0.02090955

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.62
f) Determine os momentos flectores nos pontos nodais do elemento nº 2,. sabendo que os esforços nos pontos de Gauss deste elementos são os apresentados no Quadro seguinte. Comente os resultados obtidos.
Element number (ielem) Gauss point number for axial stresses (igstm) Gauss point number for bending stresses (igstb) Gauss point number for shear stresses (igsts) Gauss point global coordinates (gpcot_m) Gauss point global coordinates (gpcot_b) Gauss point global coordinates (gpcot_s) X axial force (Nx) XY shear force (Nxy) Y bending moment (My) ielem igstm Nx gpcot_m igsts Nxy gpcot_s igstb My gpcot_b 2 1 0.00000000 6.05662433 0.00000000 2 2 0.00000000 8.94337567 0.00000000 2 1 -328.74848110 6.05662433 0.00000000 2 2 -159.58485223 8.94337567 0.00000000 2 1 840.75756015 6.05662433 0.00000000 2 2 135.90910652 8.94337567 0.00000000 NOTA: No cálculo da matriz de rigidez, do vector das forças nodais equivalentes e dos esforços utilize a integração reduzida. Dados: Peso específico do material constituinte da estrutura=25 kN/m3; Largura da estrutura = 0.4 m; Módulo de elasticidade longitudinal do material constituinte da estrutura = 30 GPa;
Coeficiente de Poisson=0.0.
0.40m x 1
2x
1
10.0m
1.2m
50.0 kN/m
100 kN
1 2
2 3 4 5 h
2.116.0008.0 121 +−= xxh
Figura 1

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.63
1 - O elemento de quatro nós representado na Figura 1 pertence a um pórtico plano. Utilizando a teoria de Timoshenko e a formulação isoparamétrica dos elementos finitos: a) determine a matriz de deformação, B , deste elemento, em coordenadas normalizadas, s1 . b) calcule os valores da matriz de deformação relativa ao corte, Bc , em s1 0= .
== =
4321
s1-1 +1x1 8.07.57.0 (m)8.5
Figura 1 - Elemento finito de quatro
nós. 2 - Na folha em anexo apresenta-se um ficheiro de dados do programa de cálculo automático femixnd. a) Desenhe a estrutura e as condições de ligação da estrutura ao exterior. b) Represente as acções que actuam na estrutura. c) Calcule o coeficiente de rigidez ( )K E
8 8, da matriz de rigidez da estrutura. d) Admitindo que os deslocamentos dos nós da estrutura em análise, no referencial global, são os seguintes (obtidos por intermédio do femixnd): *** Nodal displacements: (global coordinate system) Point number (ipoin) X displacement (delta-x) Y displacement (delta-y) Theta-Y rotation (delta-ty) ipoin delta-x delta-y delta-ty 1 0.00000000 0.00000000 0.00064587 2 0.00112211 0.00115465 0.00017538 3 -0.00038725 -0.00119933 -0.00290275 4 -0.00019362 -0.01095866 -0.00395138 5 0.00000000 -0.01698954 0.00000000
determine os momentos flectores nos pontos de Gauss do elemento nº 2. 3 - Na Figura 2 representa-se um edifício habitacional de três andares situado em Guimarães e num terreno tipo II. Utilizando o método de Rayleigh, determine as forças máximas ao nível de cada andar devidas às acções sísmicas regulamentares segundo a direcção x1 (no cálculo dos deslocamentos considere as vigas de rigidez infinita).
x1(m)
6.0
(0.45x0.45)(0.45x0.45)
(0.4x0.4) (0.4x0.4)
(0.5x0.5)(0.5x0.5)
6.0
6.0
3.0
3.0
4.0
6.0
6.0 6.0
(0.45x0.45)
(0.4x0.4)
(0.5x0.5)

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.64
Dados: - módulo de elasticidade longitudinal do betão = 30 GPa; coeficiente de amortecimento=5% - vigas de secção 0.3x0.7 m2; - peso próprio das lajes, com 0.3 m de espessura = 3 kN/m2; - peso de revestimentos e paredes de alvenaria = 2.5 kN/m2;
### Main title of the problem ### Elementos de tres nos ### (kN,m) Teste Comp. Est. - Fevereiro 1998 ; ### Main parameters 2 ; # nelem (n. of elements in the mesh) 5 ; # npoin (n. of points in the mesh) 2 ; # nvfix (n. of points with fixed degrees of freedom) 1 ; # ncase (n. of load cases) 1 ; # nmats (n. of sets of material properties) (only in linear regime) 1 ; # nspen (n. of sets of element nodal properties) (only in linear regime) 10 ; # ntype (problem type) 1 ; # ntyan (type of analysis) 3 ; # nnode (n. of nodes per element) 2 ; # ngaum (n. of Gauss points for axial rigidity) 2 ; # ngaub (n. of Gauss points for bending rigidity) 2 ; # ngaus (n. of Gauss points for shear rigidity) 2 ; # ngstm (n. of Gauss points for axial forces) 2 ; # ngstb (n. of Gauss points for bending moments) 2 ; # ngsts (n. of Gauss points for shear forces) 2 ; # ndime (n. of geometric dimensions) 3 ; # ndofn (n. of degrees of freedom per node) 4 ; # nprop (n. of material properties used in the formulation) 2 ; # npren (n. of element nodal properties used in the formulation) 0 ; # npscs (n. of points with specified coordinate system) 0 ; # nsscs (n. of sets of specified coordinate system) 0 ; # npspr (n. of springs) 0 ; # nsspv (n. of sets of spring vectors) ### Material properties index, element nodal properties index and ### list of the nodes of each element # ielem matno ielnp lnods ... 1 1 1 1 2 3 ; 2 1 1 3 4 5 ; ### Coordinates of the points # ipoin coord-g1 coord-g2 1 0.00000000 3.00000000 ; 2 2.00000000 1.50000000 ; 3 4.00000000 0.00000000 ; 4 6.50000000 0.00000000 ; 5 9.00000000 0.00000000 ; ### Points with fixed degrees of freedom and fixity codes (1-fixed;0-free) # ivfix nofix ifpre 1 1 1 1 0 ; 2 5 1 0 1 ; ### Points wiyh specified coordinate system (index, point number and type ### of coordinate system) # ipscs npspe itycs ### Specified coordinate system # isscs ### Transformation matrix from specified to global coordinate system (coscs) ### (Each row of coscs includes the components of a specified ### coordinate system vector in the global coordinate system) # ivect coscs... # isscs ### Transformation matrix from specified to global coordinate system (coscs) ### (Each row of coscs includes the components of a specified ### coordinate system vector in the global coordinate system) # ivect coscs... ### Spring index, point number, type of spring vector, rigidity value, ### and flag to choice between displacement rigidity (d) or ### rotational rigidity (r) (only when npspr > 0) # ipspr nsprp ityvs sprva drrif ### Index set of spring vector. Components in the global coordinate system ### of the sets of spring vectors (only when nsspv > 0) # isspv

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.65
# cgspv... ### Sets of material properties ### (Young modulus, Poisson ratio, mass per unit volume and thermic coeff.) # imats young poiss dense alpha 1 30e+06 0.00 1.0 1e-5 ; ### Sets of element nodal properties ### (Cross section area, tortional and flexural inertia and ### local coordinate system definition angle in degrees) # ispen 1 ; # inode barea bin2l 1 0.15 0.003125 ; 2 0.15 0.003125 ; 3 0.15 0.003125 ; # =================================================================== ### Title of the first load case Accoes ; ### Load parameters 0 ; # nplod (n. of point loads in nodal points) 0 ; # ngrav (gravity load flag: 1-yes;0-no) 2 ; # nedge (n. of edge loads) 0 ; # ntemp (n. of elements with temperature variation) 0 ; # nepoi (n. of element point loads) 0 ; # nprva (n. of prescribed and non zero degrees of freedom) ### Point loads in nodal points (loaded point and load value) ### (global coordinate system) # iplod lopop pload-g1 pload-g2 pload-g3 ### Gravity load (gravity acceleration) ### (global coordinate system) # gravi-g1 gravi-g2 ### Edge load (loaded element, loaded points and load value) ### (local coordinate system) # iedge loele 1 1 ; # lopoe q_l1 q_l2 q_l3 1 0.0 0.0 0.0 ; 2 0.0 -15.0 0.0 ; 3 0.0 -30.0 0.0 ; # iedge loele 2 2 ; # lopoe q_l1 q_l2 q_l3 3 0.0 -30.0 0.0 ; 4 0.0 -30.0 0.0 ; 5 0.0 -30.0 0.0 ; ### Thermal load (loaded set temperature variation, n. of elements, ### loaded bar, uniform temperature, l2 variation, l3 sectional thick.) # itemp loelt # ilopo teuni tevab_l2 secth_l3 ### Element point load (loaded element, distance to the left ### end and load value) (global coordinate system) # il1le loelp l1lep epoil_g1 epoil_g2 epoil_g3 ### Prescribed variables (point, degree of freedom and prescribed value) ### (global coordinate system) # iprva nnodp ndofp prval END_OF_FILE ; 2 - Na folha em anexo apresenta-se um ficheiro de dados do programa de cálculo automático femixnd. a) Desenhe a estrutura, as condições de ligação da estrutura ao exterior e as características geométricas das secções das barras. b) Represente as acções que actuam na estrutura. c) Calcule a submatriz de rigidez associada aos graus de liberdade do nó 3. d) Determine os esforços de corte no(s) ponto(s) de Gauss do elemento nº 3, admitindo que os deslocamentos dos nós da estrutura em análise, no referencial global, são os seguintes (obtidos por intermédio do femixnd):

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.66
Point number (ipoin) X displacement (delta-x) Y displacement (delta-y) Theta-Y rotation (delta-ty) ipoin delta-x delta-y delta-ty 1 0.00000000 0.00000000 0.00000000 2 0.00236404 -0.00012215 -0.00306316 3 0.00515614 -0.00024431 -0.00057076 4 0.00515614 -0.00111798 -0.00006192 5 0.00515614 0.00000000 0.00091145 6 0.00542503 0.00007585 0.00017789 7 0.00536218 0.00000000 -0.00008697 e) Obtenha os momentos flectores nos pontos nodais dos elementos nº 3 e 4, admitindo que os esforços no(s) ponto(s) de Gauss dos elementos são os seguintes (obtidos por intermédio do femixnd): Element number (ielem) Gauss point number for axial force (igstm) Gauss point number for shear force (igsts) Gauss point number for bending moment (igstb) Gauss point global coordinates (gpcot_m) Gauss point global coordinates (gpcot_b) Gauss point global coordinates (gpcot_s) X axial force (Nx) XY shear force (Nxy) Y bending moment (My) ielem igstm Nx gpcot_m igsts Nxy gpcot_s igstb My gpcot_b 1 1 -219.87798778 4.00000000 0.75000000 1 1 -50.00000000 4.00000000 0.75000000 1 1 41.35264524 4.00000000 0.75000000 2 1 -219.87798778 4.00000000 2.25000000 2 1 -50.00000000 4.00000000 2.25000000 2 1 -33.64735476 4.00000000 2.25000000 3 1 0.00000000 5.25000000 3.00000000 3 1 -74.54051071 5.25000000 3.00000000 3 1 -32.97308485 5.25000000 3.00000000 4 1 0.00000000 7.75000000 3.00000000 4 1 50.45948929 7.75000000 3.00000000 4 1 -63.07436162 7.75000000 3.00000000 5 1 -49.70248624 3.00000000 3.75000000 5 1 66.26998166 3.00000000 3.75000000 5 1 -48.51243122 3.00000000 3.75000000 6 1 10.29751376 1.00000000 5.25000000 6 1 -13.73001834 1.00000000 5.25000000 6 1 17.16252293 1.00000000 5.25000000 Comente os resultados obtidos. ANEXO ### Main title of the problem ### (kN,m) Exame de Complementos de Estruturas - Fevereiro 1998 ; ### Main parameters 6 ; # nelem (n. of elements in the mesh) 7 ; # npoin (n. of points in the mesh) 3 ; # nvfix (n. of points with fixed degrees of freedom) 1 ; # ncase (n. of load cases) 1 ; # nmats (n. of sets of material properties) (only in linear regime) 2 ; # nspen (n. of sets of element nodal properties) (only in linear regime) 10 ; # ntype (problem type) 1 ; # ntyan (type of analysis)

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.67
2 ; # nnode (n. of nodes per element) 1 ; # ngaum (n. of Gauss points for axial rigidity) 1 ; # ngaub (n. of Gauss points for bending rigidity) 1 ; # ngaus (n. of Gauss points for shear rigidity) 1 ; # ngstm (n. of Gauss points for axial forces) 1 ; # ngstb (n. of Gauss points for bending moments) 1 ; # ngsts (n. of Gauss points for shear forces) 2 ; # ndime (n. of geometric dimensions) 3 ; # ndofn (n. of degrees of freedom per node) 4 ; # nprop (n. of material properties used in the formulation) 2 ; # npren (n. of element nodal properties used in the formulation) 0 ; # npscs (n. of points with specified coordinate system) 0 ; # nsscs (n. of sets of specified coordinate system) 0 ; # npspr (n. of springs) 0 ; # nsspv (n. of sets of spring vectors) ### Material properties index, element nodal properties index and ### list of the nodes of each element # ielem matno ielnp lnods ... 1 1 1 1 2 ; 2 1 1 2 3 ; 3 1 2 3 4 ; 4 1 2 4 5 ; 5 1 2 3 6 ; 6 1 2 6 7 ; ### Coordinates of the points # ipoin coord-g1 coord-g2 1 4.00000000 0.00000000 ; 2 4.00000000 1.50000000 ; 3 4.00000000 3.00000000 ; 4 6.50000000 3.00000000 ; 5 9.00000000 3.00000000 ; 6 2.00000000 4.50000000 ; 7 0.00000000 6.00000000 ; ### Points with fixed degrees of freedom and fixity codes (1-fixed;0-free) # ivfix nofix ifpre 1 1 1 1 1 ; 2 5 0 1 0 ; 3 7 0 1 0 ; ### Sets of material properties ### (Young modulus, Poisson ratio, mass per unit volume and thermic coeff.) # imats young poiss dense alpha 1 30e+06 0.00 1.0 1e-5 ; ### Sets of element nodal properties ### (Cross section area, tortional and flexural inertia and ### local coordinate system definition angle in degrees) # ispen 1 ; # inode barea bin2l 1 0.09 0.000675 ; 2 0.09 0.000675 ; # ispen 2 ; # inode barea bin2l 1 0.18 0.0054 ; 2 0.18 0.0054 ; # =================================================================== ### Title of the first load case Accoes ; ### Load parameters 2 ; # nplod (n. of point loads in nodal points) 0 ; # ngrav (gravity load flag: 1-yes;0-no) 2 ; # nedge (n. of edge loads) 0 ; # ntemp (n. of elements with temperature variation) 0 ; # nepoi (n. of element point loads) 0 ; # nprva (n. of prescribed and non zero degrees of freedom) ### Point loads in nodal points (loaded point and load value) ### (global coordinate system) # iplod lopop pload-g1 pload-g2 pload-g3 1 3 50.0 0.0 0.0 ; 2 6 0.0 -100.0 0.0 ; ### Edge load (loaded element, loaded points and load value) ### (local coordinate system) # iedge loele 1 3 ; # lopoe q_l1 q_l2 q_l3 3 0.0 -50.0 0.0 ; 4 0.0 -50.0 0.0 ; # iedge loele 2 4 ; # lopoe q_l1 q_l2 q_l3

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.68
4 0.0 -50.0 0.0 ; 5 0.0 -50.0 0.0 ; END_OF_FILE ;
4 – A viga representada na Figura 1 está discretizada por um elemento de 3 nós de Timoshenko. Deduza o vector das forças nodais equivalentes à acção actuante.
5.00 m
50 kN/m
Figura 1
1 – No Quadro 1 apresenta-se um ficheiro de dados do programa de cálculo automático femixnd. a) Calcule a submatriz de rigidez associada aos graus de liberdade do nó 6. b) Determine os esforços de flexão no(s) ponto(s) de Gauss do elemento nº 1, admitindo que os deslocamentos dos nós deste elemento, no referencial global, são os seguintes (obtidos por intermédio do femixnd): Point number (ipoin) X displacement (delta-x) Y displacement (delta-y) Theta-Y rotation (delta-ty) ipoin delta-x delta-y delta-ty 1 0.00000000 0.00000000 -0.00000000 2 -0.00004607 -0.00010529 0.00005157 6 -0.00003950 -0.00017111 -0.00005264
2 - Na Figura 1 representa-se um edifício habitacional de três andares situado em Lisboa e num terreno do tipo II. a) Calcule as forças de massa que actuam ao nível de cada piso. b) Distribua essas forças pelos pórticos que discretizam a estrutura. c) Utilizando o método de Rayleigh, determine as forças máximas ao nível de cada andar, no pórtico 1
2xP , devidas às acções sísmicas regulamentares (no cálculo dos deslocamentos considere as vigas de rigidez infinita). Dados: - módulo de elasticidade longitudinal do betão = 35 GPa; - coeficiente de amortecimento=5% - vigas de secção 0.3x0.6 m2; - peso próprio das lajes, com 0.25 m de espessura = 3.0 kN/m2; - peso de revestimentos e paredes de alvenaria = 2.0 kN/m2;
x1
(m)
5.0
5.0
5.0
x2Px2
1 Px2
2
Px1
1
Px1
2
Px1
3
Figura 1a
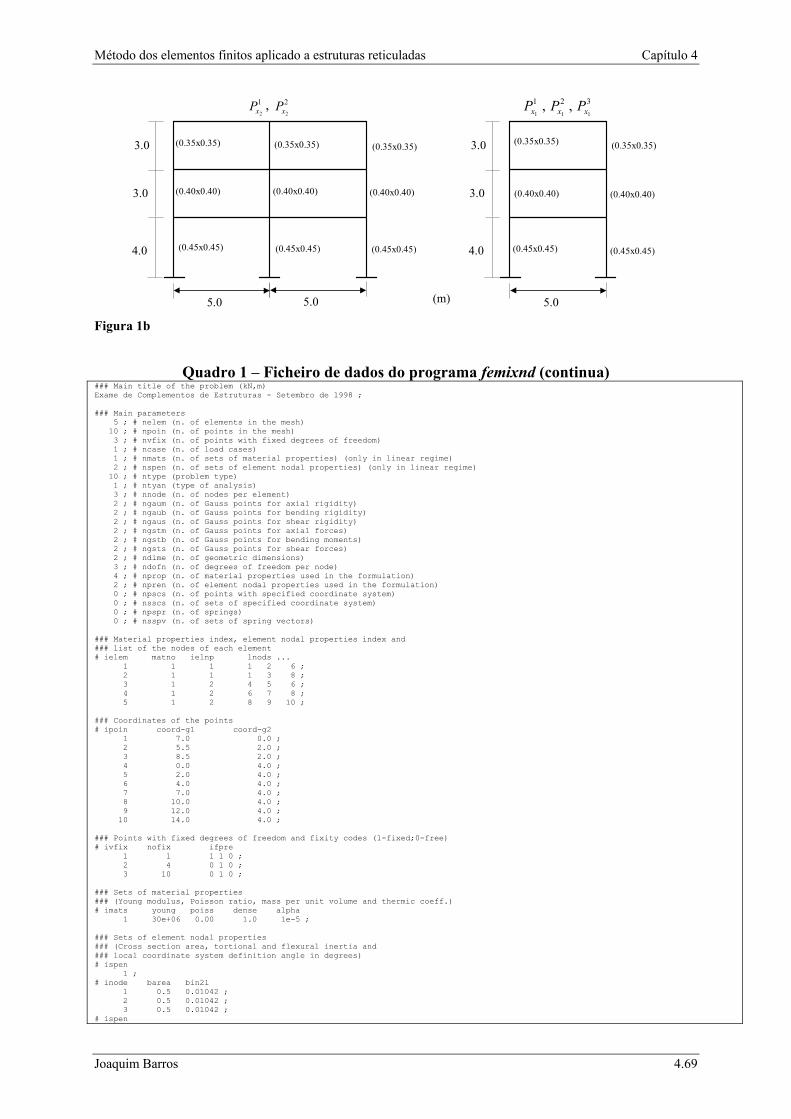
Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.69
(m)
(0.40x0.40)(0.40x0.40)
(0.35x0.35)3.0
3.0
4.0
5.0 5.0
(0.40x0.40)
3.0
3.0
4.0
5.0
11xP , 2
1xP , 31xP
(0.35x0.35) (0.35x0.35)
(0.45x0.45) (0.45x0.45) (0.45x0.45)
(0.35x0.35) (0.35x0.35)
(0.40x0.40) (0.40x0.40)
(0.45x0.45) (0.45x0.45)
Px2
1 , Px2
2
Figura 1b
Quadro 1 – Ficheiro de dados do programa femixnd (continua) ### Main title of the problem (kN,m) Exame de Complementos de Estruturas - Setembro de 1998 ; ### Main parameters 5 ; # nelem (n. of elements in the mesh) 10 ; # npoin (n. of points in the mesh) 3 ; # nvfix (n. of points with fixed degrees of freedom) 1 ; # ncase (n. of load cases) 1 ; # nmats (n. of sets of material properties) (only in linear regime) 2 ; # nspen (n. of sets of element nodal properties) (only in linear regime) 10 ; # ntype (problem type) 1 ; # ntyan (type of analysis) 3 ; # nnode (n. of nodes per element) 2 ; # ngaum (n. of Gauss points for axial rigidity) 2 ; # ngaub (n. of Gauss points for bending rigidity) 2 ; # ngaus (n. of Gauss points for shear rigidity) 2 ; # ngstm (n. of Gauss points for axial forces) 2 ; # ngstb (n. of Gauss points for bending moments) 2 ; # ngsts (n. of Gauss points for shear forces) 2 ; # ndime (n. of geometric dimensions) 3 ; # ndofn (n. of degrees of freedom per node) 4 ; # nprop (n. of material properties used in the formulation) 2 ; # npren (n. of element nodal properties used in the formulation) 0 ; # npscs (n. of points with specified coordinate system) 0 ; # nsscs (n. of sets of specified coordinate system) 0 ; # npspr (n. of springs) 0 ; # nsspv (n. of sets of spring vectors) ### Material properties index, element nodal properties index and ### list of the nodes of each element # ielem matno ielnp lnods ... 1 1 1 1 2 6 ; 2 1 1 1 3 8 ; 3 1 2 4 5 6 ; 4 1 2 6 7 8 ; 5 1 2 8 9 10 ; ### Coordinates of the points # ipoin coord-g1 coord-g2 1 7.0 0.0 ; 2 5.5 2.0 ; 3 8.5 2.0 ; 4 0.0 4.0 ; 5 2.0 4.0 ; 6 4.0 4.0 ; 7 7.0 4.0 ; 8 10.0 4.0 ; 9 12.0 4.0 ; 10 14.0 4.0 ; ### Points with fixed degrees of freedom and fixity codes (1-fixed;0-free) # ivfix nofix ifpre 1 1 1 1 0 ; 2 4 0 1 0 ; 3 10 0 1 0 ; ### Sets of material properties ### (Young modulus, Poisson ratio, mass per unit volume and thermic coeff.) # imats young poiss dense alpha 1 30e+06 0.00 1.0 1e-5 ; ### Sets of element nodal properties ### (Cross section area, tortional and flexural inertia and ### local coordinate system definition angle in degrees) # ispen 1 ; # inode barea bin2l 1 0.5 0.01042 ; 2 0.5 0.01042 ; 3 0.5 0.01042 ; # ispen

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.70
2 ; # inode barea bin2l 1 0.5 0.04167 ; 2 0.5 0.04167 ; 3 0.5 0.04167 ; # =================================================================== ### Title of the first load case Accoes ; ### Load parameters 0 ; # nplod (n. of point loads in nodal points) 0 ; # ngrav (gravity load flag: 1-yes;0-no) 3 ; # nedge (n. of edge loads) 0 ; # ntemp (n. of elements with temperature variation) 0 ; # nepoi (n. of element point loads) 0 ; # nprva (n. of prescribed and non zero degrees of freedom) ### Edge load (loaded element, loaded points and load value) ### (local coordinate system) # iedge loele 1 3 ; # lopoe q_l1 q_l2 q_l3 4 0.0 -50.0 0.0 ; 5 0.0 -50.0 0.0 ; 6 0.0 -50.0 0.0 ; # iedge loele 2 4 ; # lopoe q_l1 q_l2 q_l3 6 0.0 -50.0 0.0 ; 7 0.0 -50.0 0.0 ; 8 0.0 -50.0 0.0 ; # iedge loele 3 5 ; # lopoe q_l1 q_l2 q_l3 8 0.0 -50.0 0.0 ; 9 0.0 -50.0 0.0 ; 10 0.0 -50.0 0.0 ; END_OF_FILE ;
1 – Na Figura 1 representa-se um elemento de viga de Timoshenko de 3 nós. Determine as forças nodais equivalentes à força de 100 kN aplicada ortogonalmente ao eixo da viga, a 0.5 m da sua extremidade esquerda.
1 3
F=100 kN
1s
0.5 m
1.5 m 1.5 m 1
2
( )32
Figura 1 2 – A estrutura representada na Figura 2 está descretizada em 4 elementos de 3 nós de Timoshenko. e) Desprezando a deformabilidade axial das barras e utilizando a integração reduzida, calcule os
coeficientes de rigidez relativos ao nó B. f) Calcule as forças nodais equivalentes no nó B. g) Considerando dois pontos de Gauss por elemento, calcule os esforços de flexão e de corte no
elemento nº 1, sabendo que os deslocamentos dos nós deste elemento, no referencial global, são os seguintes :
Nó deslocamento segundo x1 deslocamento segundo x2 rotação segundo x3 1 0.00000000 0.00000000 -0.00084618 2 -0.00000000 -0.00091344 -0.00056319 3 -0.00000000 -0.00127759 0.00003270 h) Com base nos esforços do elemento nº 1 , determine o momento no nó A. Se os resultados não lhe
parecem aceitáveis, explique como procederia para melhorar os resultados obtidos. Dados: b=0.3 m, h=0.7 m; E=30 GPa, 0.0=υ Mola: mkNkm /000500=

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.71
100 kN
3.00
m
5.00 m 4.00 m
km = 500 000kN/m
x 3
1x
2x
1 2 3 4 5
6
7
8
9
50 kN/m
1 2
3
4
A B
C
Figura 2
1 – No Quadro 1 apresenta-se um ficheiro de dados do programa de cálculo automático femixnd. a) Desenhe a estrutura, as condições de ligação da estrutura ao exterior e as características geométricas das secções das barras. b) Represente as acções que actuam na estrutura. c) Calcule a submatriz de rigidez associada aos graus de liberdade do nó 5. d) Calcule as forças nodais equivalentes correspondentes aos graus de liberdade do nó 5. d) Determine o momento flector e o esforço de corte no ponto de Gauss nº 1 do elemento nº 2, admitindo que os deslocamentos dos nós da estrutura em análise, no referencial global, são os seguintes (obtidos por intermédio do femixnd): Point number (ipoin) X displacement (delta-x) Y displacement (delta-y) Theta-Y rotation (delta-ty) ipoin delta-x delta-y delta-ty 1 0.00000000 0.00000000 -0.00016467 2 0.00000000 -0.00030491 -0.00084488 3 0.00017332 -0.00028604 -0.00007005 4 -0.00037563 -0.00079193 0.00019140 5 0.00006277 -0.00019359 0.00021382 6 0.00003138 -0.00015256 -0.00003199 7 0.00000000 0.00000000 0.00033052

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.72
Quadro 1 – Ficheiro de dados ### Main title of the problem ## Linear analysis Complementos de Estruturas: 1a. chamada de Novembro de 1999 ; ### Main parameters 3 ; # nelem (n. of elements in the mesh) 7 ; # npoin (n. of points in the mesh) 3 ; # nvfix (n. of points with fixed degrees of freedom) 1 ; # ncase (n. of load cases) 2 ; # nmats (n. of sets of material properties) (only in linear regime) 2 ; # nspen (n. of sets of element nodal properties) (only in linear regime) 10 ; # ntype (problem type: 10-2D Timoshenko beam; 11-3D Timoshenko beam) 1 ; # ntyan (type of analysis:1-lin.;2-mat. nlin.;3-dyn. lin.;4-dyn. mat. nlin.) 3 ; # nnode (n. of nodes per element) 2 ; # ngaum (n. of Gauss points for the axial stiffness matrix) 2 ; # ngaub (n. of Gauss points for the bending stiffness matrix) 2 ; # ngaus (n. of Gauss points for shear stiffness matrix) 2 ; # ngstm (n. of Gauss points for the axial forces) 2 ; # ngstb (n. of Gauss points for the bending moments) 2 ; # ngsts (n. of Gauss points for the shear forces) 2 ; # ndime (n. of geometric dimensions) 3 ; # ndofn (n. of degrees of freedom per node) 4 ; # nprop (n. of material properties used in the formulation) 2 ; # npren (n. of element nodal properties used in the formulation) 0 ; # npscs (n. of points with specified coordinate system) 0 ; # nsscs (n. of sets of specified coordinate system) 0 ; # npspr (n. of springs) 0 ; # nsspv (n. of sets of spring vectors) ### Material properties index, element nodal properties index and ### list of the nodes of each element # ielem matno ielnp lnods ... 1 2 2 1 3 5 ; 2 1 1 2 4 5 ; 3 1 1 5 6 7 ; ### Coordinates of the points # ipoin coord-g1 coord-g2 1 0.0 0.0 ; 2 0.0 6.0 ; 3 2.0 1.5 ; 4 2.0 4.5 ; 5 4.0 3.0 ; 6 5.5 3.0 ; 7 7.0 3.0 ; ### Points with fixed degrees of freedom and fixity codes (1-fixed;0-free) # ivfix nofix ifpre 1 1 1 1 0 ; 2 2 1 0 0 ; 3 7 1 1 0 ; ### Sets of material properties ### (Young modulus, Poisson ratio, mass per unit volume and thermic coeff.) # imats young poiss dense alpha 1 30e+06 0.0 0.0 0.0 ; 2 200e+06 0.0 0.0 0.0 ; ### Sets of element nodal properties ### (Cross section area, tortional and flexural inertias, ### local coordinate system definition angle in degrees and ### position of the shear center at the section) # ispen 1 ; # inode barea bin2l 1 0.3 2.25e-03 ; 2 0.3 2.25e-03 ; 3 0.3 2.25e-03 ; # ispen 2 ; # inode barea bin2l 1 0.1 1e-09 ; 2 0.1 1e-09 ; 3 0.1 1e-09 ;

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.73
# =================================================================== ### Title of the first load case Load case title (1) ; ### Load parameters 0 ; # nplod (n. of point loads in nodal points) 0 ; # ngrav (gravity load flag: 1-yes;0-no) 2 ; # nedge (n. of edge loads) 0 ; # ntemp (n. of elements with temperature variation) 0 ; # nepoi (n. of element point loads) 0 ; # nprva (n. of prescribed and non zero degrees of freedom) ### Edge load (loaded element, loaded points and load value) ### (local coordinate system) # iedge loele 1 2 ; # lopoe f_l1 f_l2 m_l3 2 0.0 0.0 0.0 ; 4 0.0 -20.0 0.0 ; 5 0.0 -40.0 0.0 ; # iedge loele 2 3 ; # lopoe f_l1 f_l2 m_l3 5 0.0 -40.0 0.0 ; 6 0.0 -40.0 0.0 ; 7 0.0 -40.0 0.0 ; END_OF_FILE ; 2 – A secção da viga DE da estrutura representada na Figura 2 varia parabolicamente ao longo do seu desenvolvimento longitudinal. Para analisar esta estrutura, as barras biarticuladas foram discretizadas por um elemento finito de 3 nós e a viga DE foi discretizada por 10 elementos de 3 nós de Timoshenko de igual comprimento (2 metros cada). a) Adoptando a integração selectiva no cálculo da matriz de rigidez dos elementos finitos da viga DE,
calcule os coeficientes da matriz de rigidez global da estrutura, correspondentes aos graus de liberdade do nó D.
b) Considerando a ordem de integração que julgue adequada (justifique), calcule as forças no nó D, equivalentes à acção do peso próprio da viga. c) Sabendo que os deslocamentos, no referencial global, dos nós do 1º elemento da viga (ver Figura 2) são os seguintes (unidade de deslocamento em metros e de rotação em radianos):
*** Nodal displacements: (global coordinate system) Point number (ipoin) X displacement (delta-x) Y displacement (delta-y) Theta-Y rotation (delta-ty) ipoin delta-x delta-y delta-ty 7 (1º nó do elemento 1) 0.00036459 -0.00036458 -0.00234074 8 (2º nó do elemento 1) 0.00036459 -0.00268326 -0.00221977 9 (3º nó do elemento 1) 0.00036459 -0.00482145 -0.00199181
calcule os esforços de corte e de flexão, no ponto de Gauss mais próximo da secção D da viga. Comente os resultados obtidos. d) Se a viga DE estivesse submetida a uma de variação diferencial de temperatura ∆td, descreva os procedimentos necessários para calcular as forças nodais equivalente a esta acção, num elemento finito de Timoshenko de 3 nós. Dados: Barras biarticuladas: As = 100.0 cm2; Es = 200.0 GPa Viga DE: largura = 0.5 m; Ec = 30.0 GPa, νc=0.0; α = 1.0×10-5/oC; γc = 25.0 kN/m3

Método dos elementos finitos aplicado a estruturas reticuladas Capítulo 4
Joaquim Barros 4.74
7.0
10014
1007.0 2 ++−= xxh
20m5m
5m
10m
x
1,4m
0,7m
1
A
D
B
E
C
h Figura 2
1 - a) Admita que a viga simplesmente apoiada, representada na Figura 1 é discretizada por um único elemento finito de quatro nós de Timosenko.
a) Deduza a matriz de rigidez exacta deste elemento, apenas considerando a deformação por flexão e corte;
b) Quantos pontos de integração de Gauss-Legendre serão necessários para calcular exactamente as forças nodais equivalentes à acção actuante no elemento. Justifique.
c) Admitindo para p o valor de 100 kN/m, determine as forças nodais equivalentes à acção actuante;
d) Calcule os deslocamentos dos nós do elemento; e) Utilizando três pontos de Gauss por elemento, determine os esforços de flexão e de
corte nesses pontos de Gauss; f) Extrapole os esforços obtidos na alínea anterior para os nós do elemento finito.
Comente os resultados obtidos. Dados: Secção rectangular com largura de 0.5 m e altura de 0.7 m. Ec = 30.0 GPa, νc=0.0.
3.00 m
p kN/m 1 4
= = =2 3
Figura 1