Embed Size (px)
Citation preview

CPU의 기본 이론CPU의 기본 이론
CPU CPU 구조구조
CPU의 기본적 구성 요소CPU의 기본적 구성 요소
일반적인 CPU의 구성 요소레지스터레지스터
ALU & flag
명령 패치 및 명령 실행 모듈
CPU가 실행되기 위한 가장 기초적 요소CPU가 실행되기 위한 가장 기초적 요소메모리
ROM/FLASHROM/FLASH
RAM (SRAM,DRAM)
초기 CPU 레지스터의 구조(8비트)초기 CPU 레지스터의 구조(8비트)
초기 CPU의 레지스터초기 CPU의 레지스터A (Accumulator ) : 데이터 처리의 기본 레지스터
B : A와 연동하는 보조 레지스터B : A와 연동하는 보조 레지스터
ALU는 명령의 종류에 따라 1,2개의 요소가 필요 한데 A,B가기본 요소이다.
2개 필요 : ADD ; A+B > A2개 필요 : ADD ; A+B -> A
1개 필요 : RR A ; 오른쪽 로테이션
일반적 레지스터가 여러 개 추가 일반 레지스터일반적 레지스터가 여러 개 추가-일반 레지스터.8086,Z80 : B, C, D, E, H, L
2개의 레지스터가 결합하여 동작하기도 한다2개의 레지스터가 결합하여 동작하기도 한다.
BC, DE, HL -> 16비트 조작 명령도 있음

진화한 구조 레지스터진화한 구조 레지스터
일반 레지스터의 차이가 없다.Accumulator가 처리하는 것을 모든 일반 레지Accumulator가 처리하는 것을 든 일반 레지스터가 실행
각 레지스터간의 특별한 의미가 없이 동등각 레지스터간의 특별한 의미가 없이 동등
R0, R1, R2, … Rn
ALU와 선택적으로 연결되어 계산ALU와 선택적으로 연결되어 계산ADD R2,R3 ; R2+R3 -> R2
ARM, 68000

8비트 CPU의 특수 레지스터 종류8비트 CPU의 특수 레지스터 종류
I d 레지스터Index 레지스터주로 메모리 주소를 나타내어 데이터를 읽거나 쓸 때주소값으로 사용주 값 사용
6800 : IX, 8051 : DPTR8086,Z80 : 일반레지스터 HL을 메모리 인텍스로 사용
PC (P C t ) IP( 86)PC (Program Counter), IP(x86)현재 기계어 명령이 실행되는 있는 메모리의 위치를 나타낸다.PC값은 자동으로 처리되기 때문에 임의적으로 값을바꾸는 명령은 없다.
SP (Stack Pointer)SP (Stack Pointer)메모리를 사용한 특수 stack 처리를 위한 메모리의 위치를 지정하는 포인터 값을 갖는다.

Reset 후 초기 PC 값Reset 후 초기 PC 값
소 기계어 어셈블러주소 기계어 어셈블러ORG 0000H
0000 74 00 MOV A,01H0002 25 02 ADD A,02H0004 F5 A0 MOV 0A0,A
74
25
01
0000
0001
0002
PC=0000
,0006 02 00 57 JMP MAIN 0009 02 . . . . . .
25
02
0002
0003
A
Bdata bus
. . .
FLAG
. . .
ALU
패치(Fetch )을 할 때 PC 사용패치(Fetch )을 할 때 PC 사용
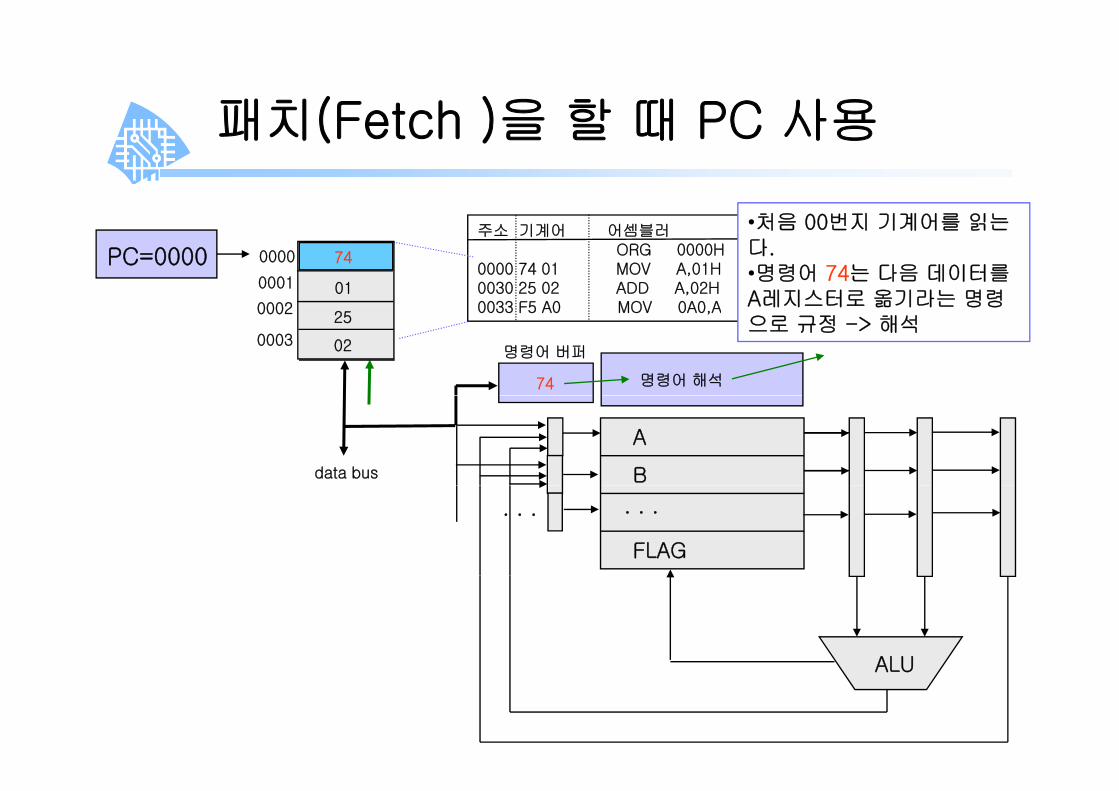
처음 00번지 기계어를 읽는주소 기계어 어셈블러ORG 0000H
0000 74 01 MOV A,01H0030 25 02 ADD A,02H0033 F5 A0 MOV 0A0 A
•처음 00번지 기계어를 읽는다. •명령어 74는 다음 데이터를A레지스터로 옮기라는 명령
01
740000
0001
0002
PC=0000
0033 F5 A0 MOV 0A0,A
74
명령어 버퍼
명령어 해석
A레지 터 옮기라는 명령으로 규정 -> 해석25
02
0002
0003
A
Bdata bus
. . .
FLAG
. . .
ALUALU
Fetch후 자동으로 PC 값 1 증가Fetch후 자동으로 PC 값 1 증가
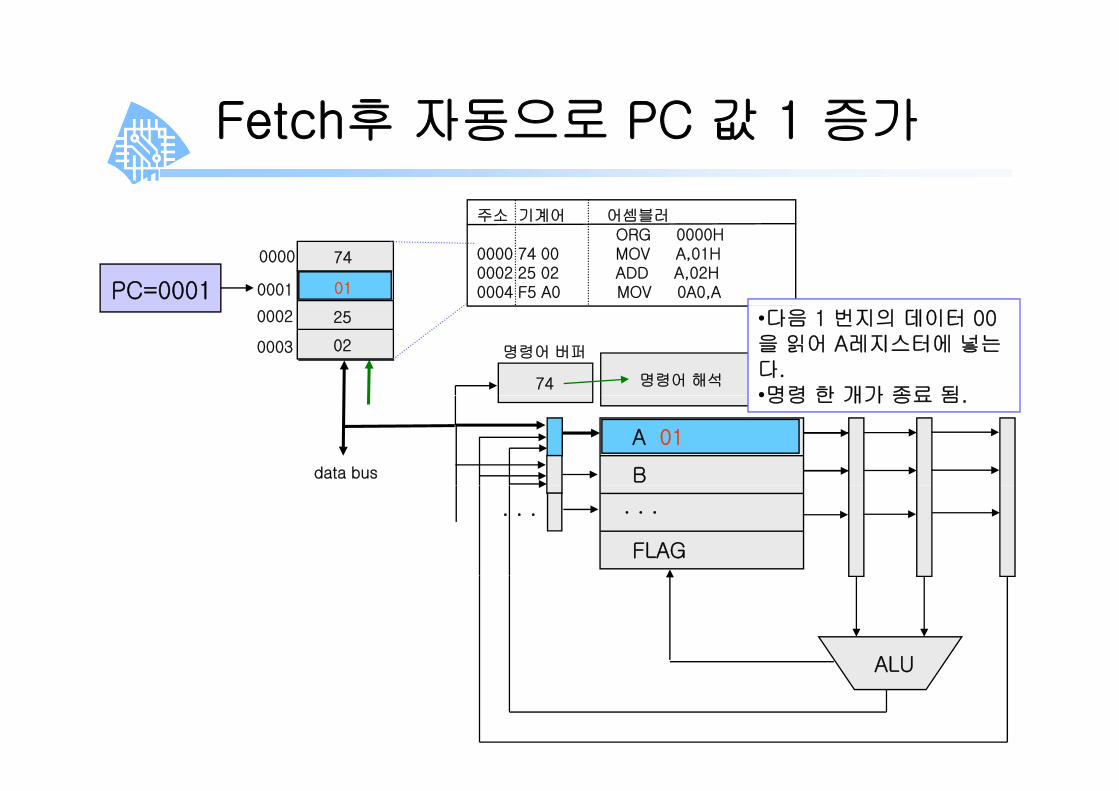
주소 기계어 어셈블러주소 기계어 어셈블러ORG 0000H
0000 74 00 MOV A,01H0002 25 02 ADD A,02H0004 F5 A0 MOV 0A0,A
74
01
0000
0001PC=0001
74
명령어 버퍼
명령어 해석
25
02
•다음 1 번지의 데이터 00을 읽어 A레지스터에 넣는다. •명령 한 개가 종료 됨
0002
0003
Bdata bus
•명령 한 개가 종료 됨.
A 01
. . .
FLAG
. . .
ALUALU
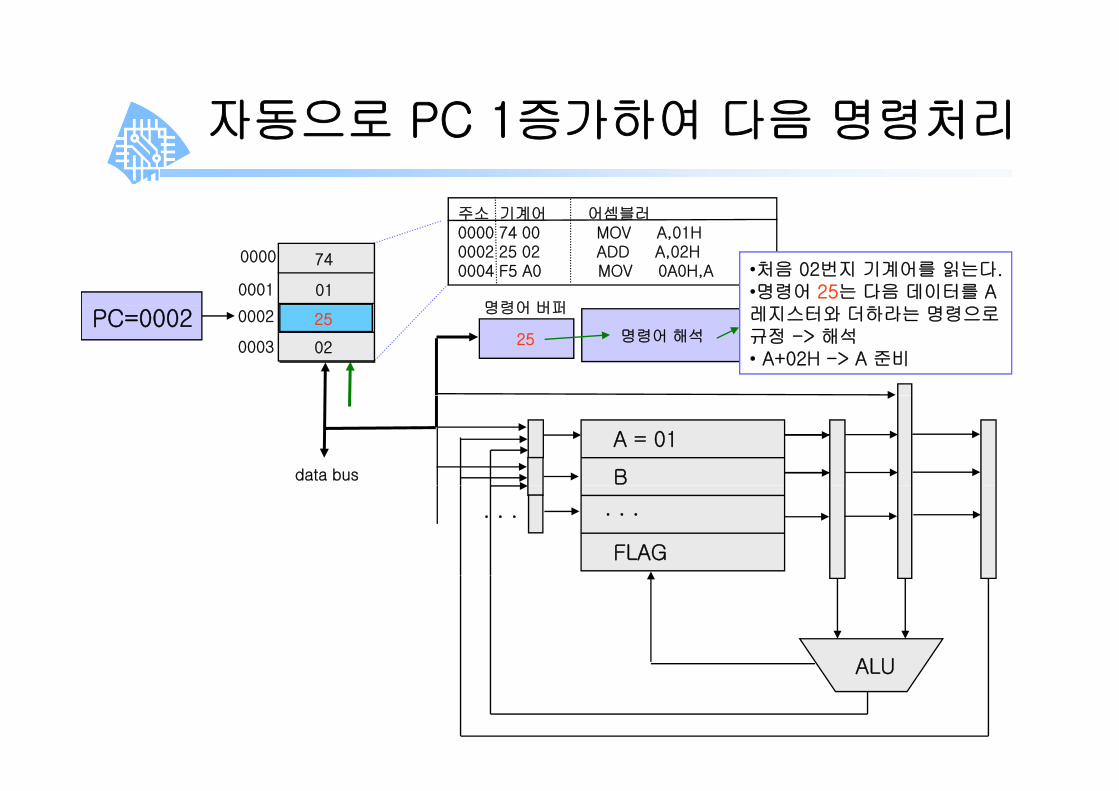
자동으로 PC 1증가하여 다음 명령처리자동으로 PC 1증가하여 다음 명령처리
주소 기계어 어셈블러주소 기계어 어셈블러0000 74 00 MOV A,01H0002 25 02 ADD A,02H0004 F5 A0 MOV 0A0H,A
명령어 버퍼
•처음 02번지 기계어를 읽는다. •명령어 25는 다음 데이터를 A01
740000
0001
25
명령어 버퍼
명령어 해석
레지스터와 더하라는 명령으로규정 -> 해석• A+02H -> A 준비
02
250002
0003
PC=0002
A = 01
Bdata bus
. . .
FLAG
. . .
ALUALU
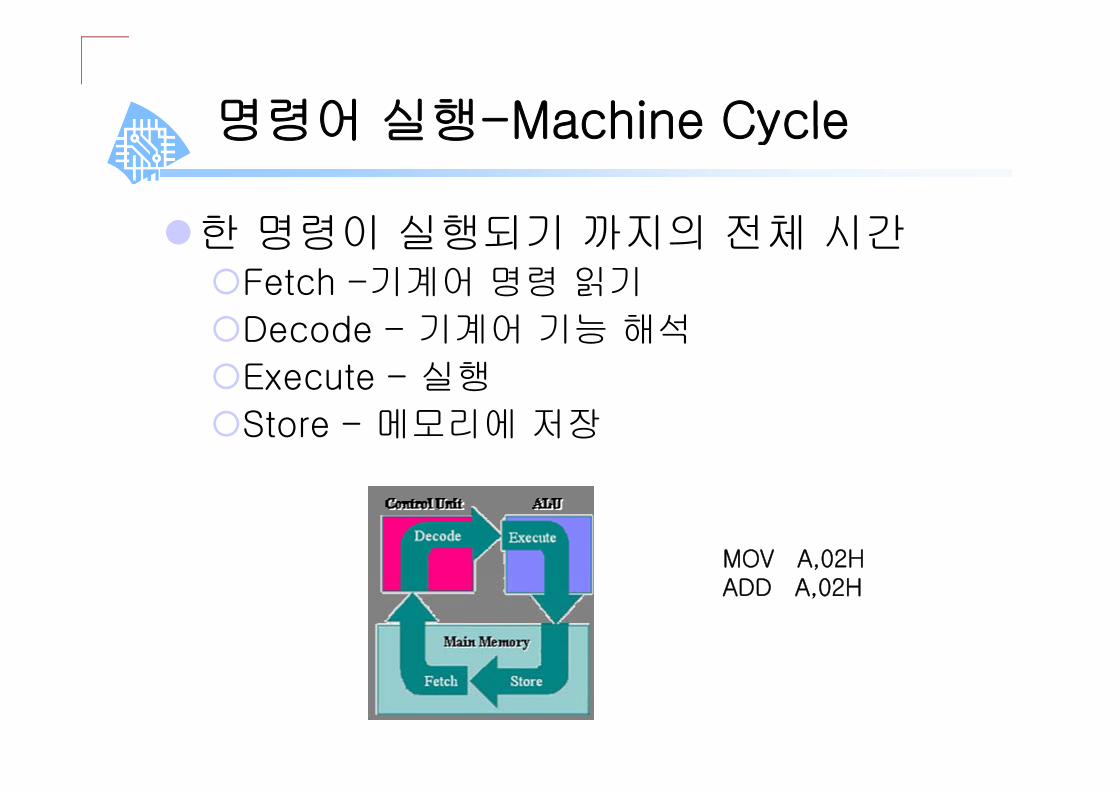
명령어 실행-Machine Cycle명령어 실행 Machine Cycle
한 명령이 실행되기 까지의 전체 시간한 명령이 실행되기 까지의 전체 시간Fetch -기계어 명령 읽기
Decode - 기계어 기능 해석
Execute - 실행
Store - 메모리에 저장
MOV A,02HADD A,02H

8051-MOVX-외부 데이터 억세스8051 MOVX 외부 데이터 억세스
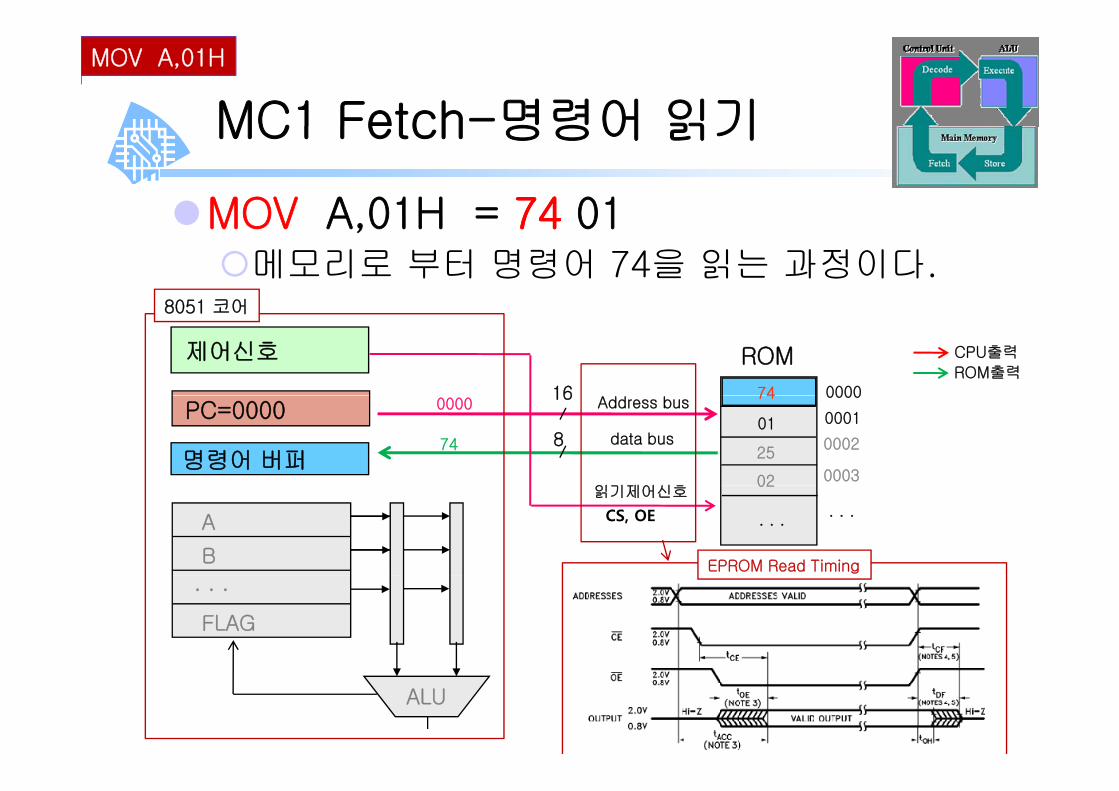
MC1 Fetch-명령어 읽기
MOV A,01H
MC1 Fetch 명령어 읽기
MOV A 01H = 7474 01MOV A,01H = 7474 01메모리로 부터 명령어 74을 읽는 과정이다.
8051 코어
74 0000
제어신호 ROM
16
CPU출력
ROM출력
8051 코어
Address bus
25
02
01
74 0000
0001
0002
0003
PC=0000data bus
명령어 버퍼읽기제어신호
16
8
0000
74
02
B
A . . .. . .
읽기제어신호
CS, OE
EPROM Read Timing. . .
FLAG
ALU

MC2 Decode – 명령어 해석
MOV A,01H
MC2 Decode 명령어 해석
MOV A,01H = 7474 01MOV A,01H 7474 01읽어들인 명령어 74을 해석 한다.
제어신호
74 0000
Decode ROM
16
Decode:74가 MOV 명령 해석
제어신호
Address bus
25
02
01
74 0000
0001
0002
0003
PC=0001data bus
명령어 버퍼 74읽기제어신호
16
8
02
B
A . . .. . .
읽기제어신호
. . .
FLAG
ALU

MC3 Execute –명령어 실행
MOV A,01H
MC3 Execute 명령어 실행
MOV A 01H = 74 0101MOV A,01H = 74 0101다음 데이터을 읽어 A에 넣기 실행
74 0000
제어신호 ROM
16
CPU출력
ROM출력
Address bus
25
02
01
74 0000
0001
0002
0003
PC=0001data bus
읽기제어신호
16
8
0001
01
02
B
A 01 . . .. . .
읽기제어신호
CS, OE
EPROM Read Timing. . .
FLAG
ALU
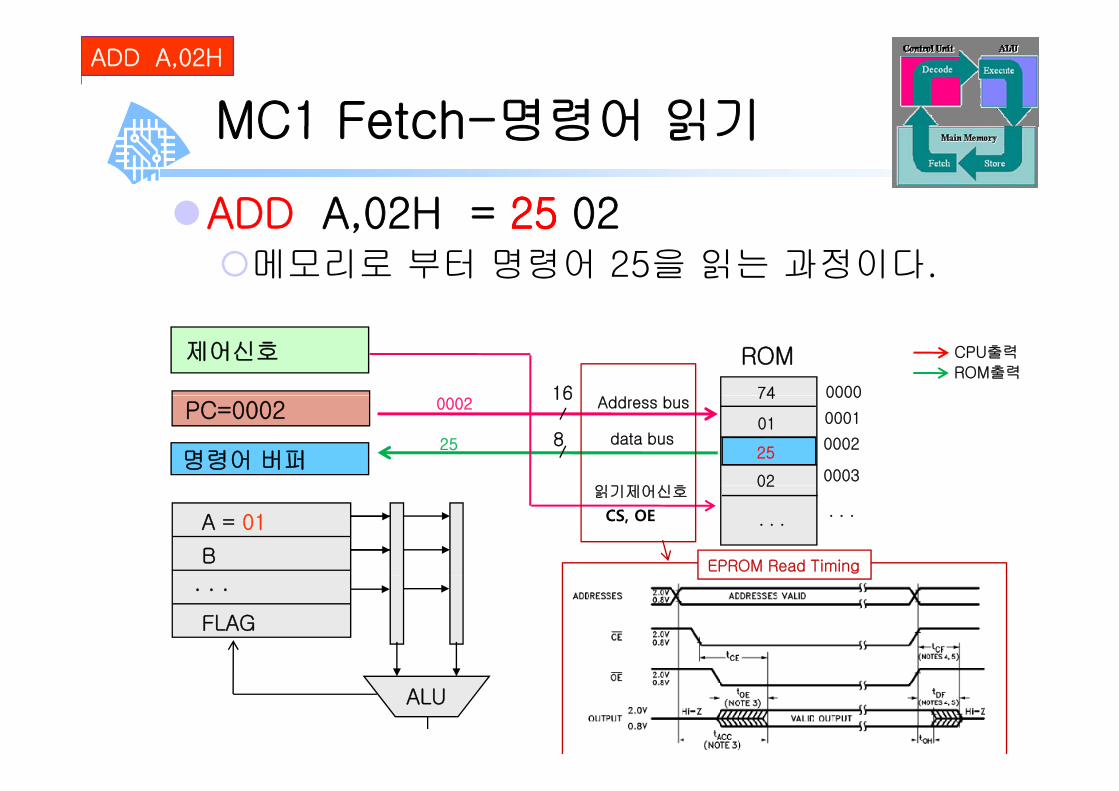
MC1 Fetch-명령어 읽기
ADD A,02H
MC1 Fetch 명령어 읽기
ADD A 02H = 2525 02ADD A,02H = 2525 02메모리로 부터 명령어 25을 읽는 과정이다.
74 0000
제어신호 ROM
16
CPU출력
ROM출력
Address bus
25
02
01
74 0000
0001
0002
0003
PC=0002data bus
명령어 버퍼읽기제어신호
16
8
0002
25
02
B
A = 01 . . .. . .
읽기제어신호
CS, OE
EPROM Read Timing. . .
FLAG
ALU
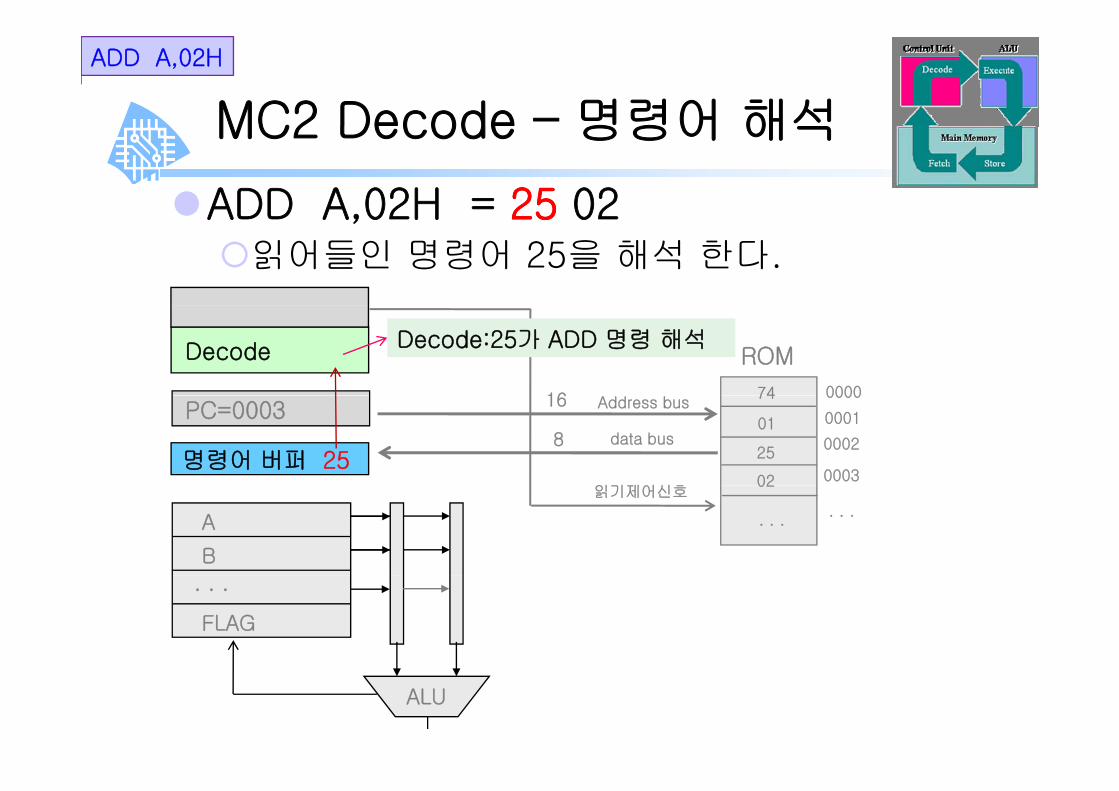
MC2 Decode – 명령어 해석
ADD A,02H
MC2 Decode 명령어 해석
ADD A,02H = 2525 02ADD A,02H 2525 02읽어들인 명령어 25을 해석 한다.
74 0000
Decode ROM
16
Decode:25가 ADD 명령 해석
Address bus
25
02
01
74 0000
0001
0002
0003
PC=0003data bus
명령어 버퍼 25읽기제어신호
16
8
02
B
A . . .. . .
읽기제어신호
. . .
FLAG
ALU

MC3 Execute –데이터 실행
ADD A,02H
MC3 Execute 데이터 실행
ADD A 02H = 25 0202ADD A,02H = 25 0202다음 데이터을 02를 읽는다.
74 0000
제어신호 ROM
16
CPU출력
ROM출력
Address bus
25
02
01
74 0000
0001
0002
0003
PC=0003data bus
읽기제어신호
16
8
0003
02Oper and 버퍼02
02
B
A 01 . . .. . .
읽기제어신호
CS, OE
EPROM Read Timing. . .
FLAG
ALU

MC4 Execute –더하기 실행
ADD A,02H
MC4 Execute 더하기 실행
ADD A,02H = 25 02ADD A,02H 25 02ALU을 이용하여 A+operand 실행
제어 : ADD
74 0000
Decode ROM
16
제어 : ADD
Address bus
25
02
01
74 0000
0001
0002
0003
PC=0004data bus
Operand 02읽기제어신호
16
8
02
B
. . .. . .
읽기제어신호
A = 01 -> 03
. . .
FLAGFLAG
01 02
ALUALUALU: ADD 선택
02
03
Z=0,C=0, N=0, Z=0,C=0, N=0, V=0, P=0V=0, P=0
MC1 Fetch-명령어 읽기
MOV 0A0H,A
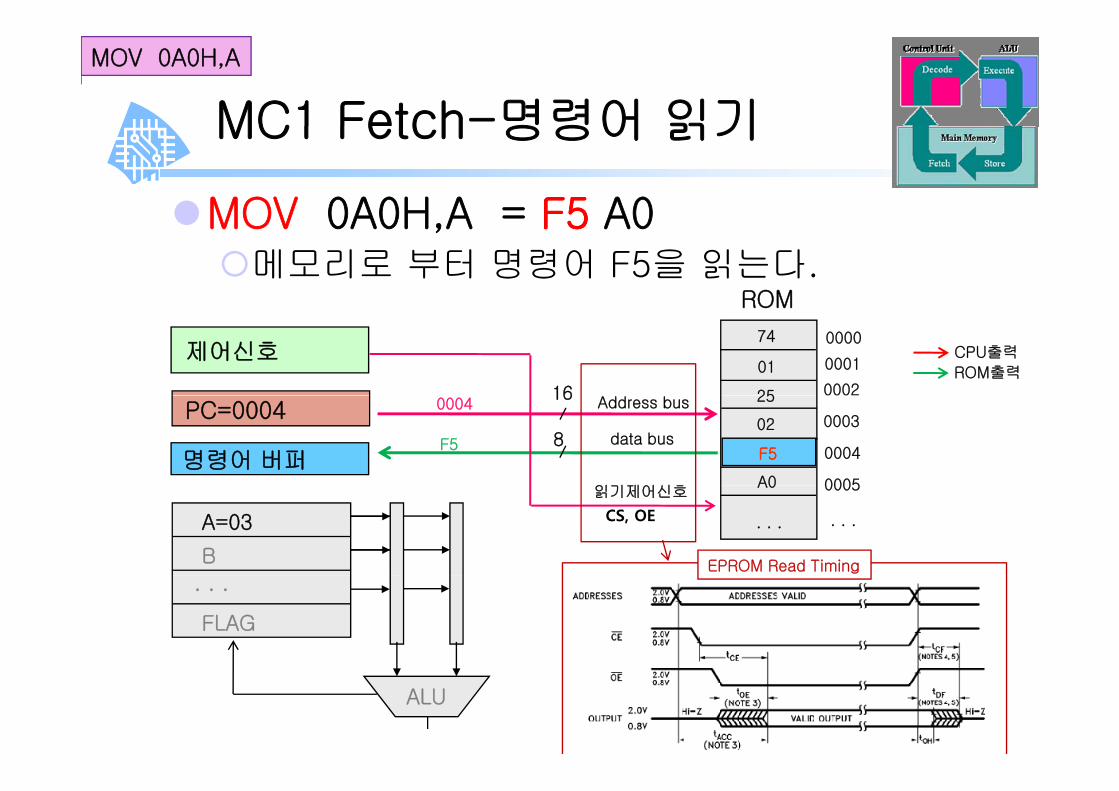
MC1 Fetch 명령어 읽기
MOV 0A0H A = F5F5 A0MOV 0A0H,A = F5F5 A0메모리로 부터 명령어 F5을 읽는다.
ROM
25
01
74 0000
0001
0002
제어신호
ROM
16
CPU출력
ROM출력
Address bus 25
02 0003PC=0004
data bus
명령어 버퍼읽기제어신호
16
8
0004
F5F5F5
A0
0004
0005
B
A=03 . . . . . .
읽기제어신호
CS, OE
EPROM Read Timing
A0 0005
. . .
FLAG
ALU
MC2 Decode – 명령어 해석
MOV 0A0H,A
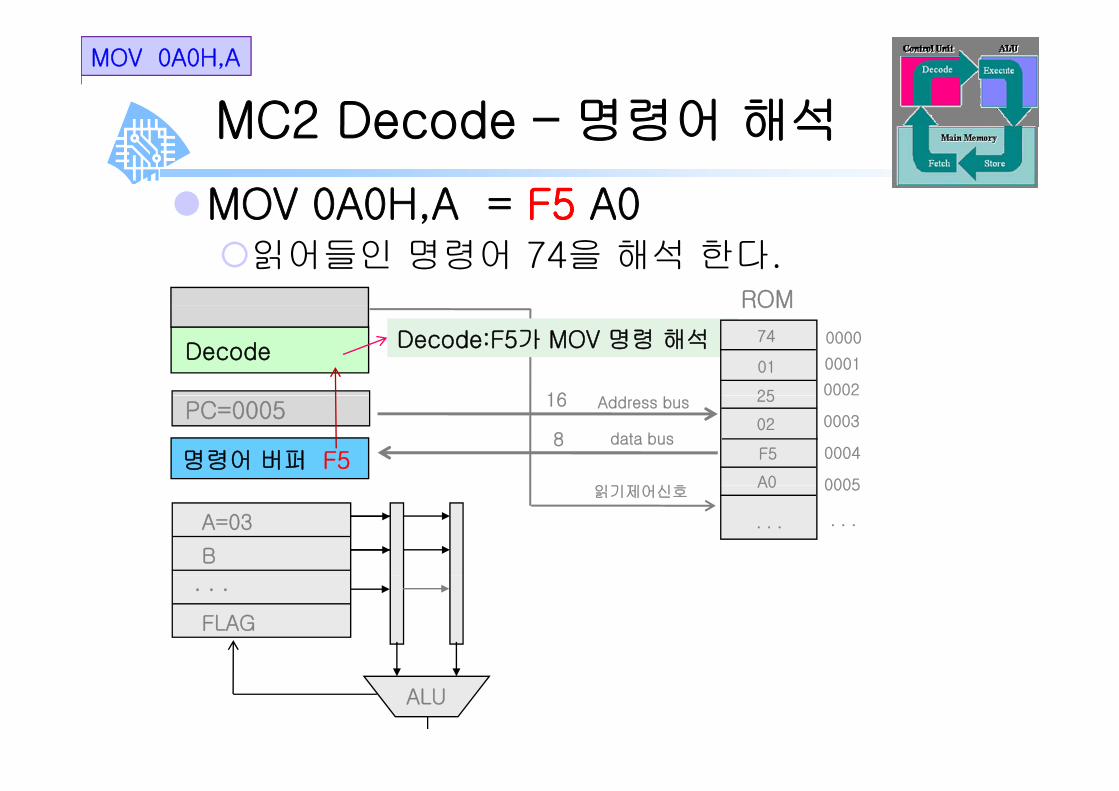
MC2 Decode 명령어 해석
MOV 0A0H,A = FF55 A0MOV 0A0H,A FF55 A0읽어들인 명령어 74을 해석 한다.
ROM
Decode
16
Decode:F5가 MOV 명령 해석
25
01
74 0000
0001
0002
ROM
Address busPC=0005data bus
명령어 버퍼 F5읽기제어신호
16
8
25
02 0003
F5
A0
0004
0005
B
A=03
읽기제어신호
. . . . . .
A0 0005
. . .
FLAG
ALU
MC3 Execute –명령어 실행
MOV 0A0H,A
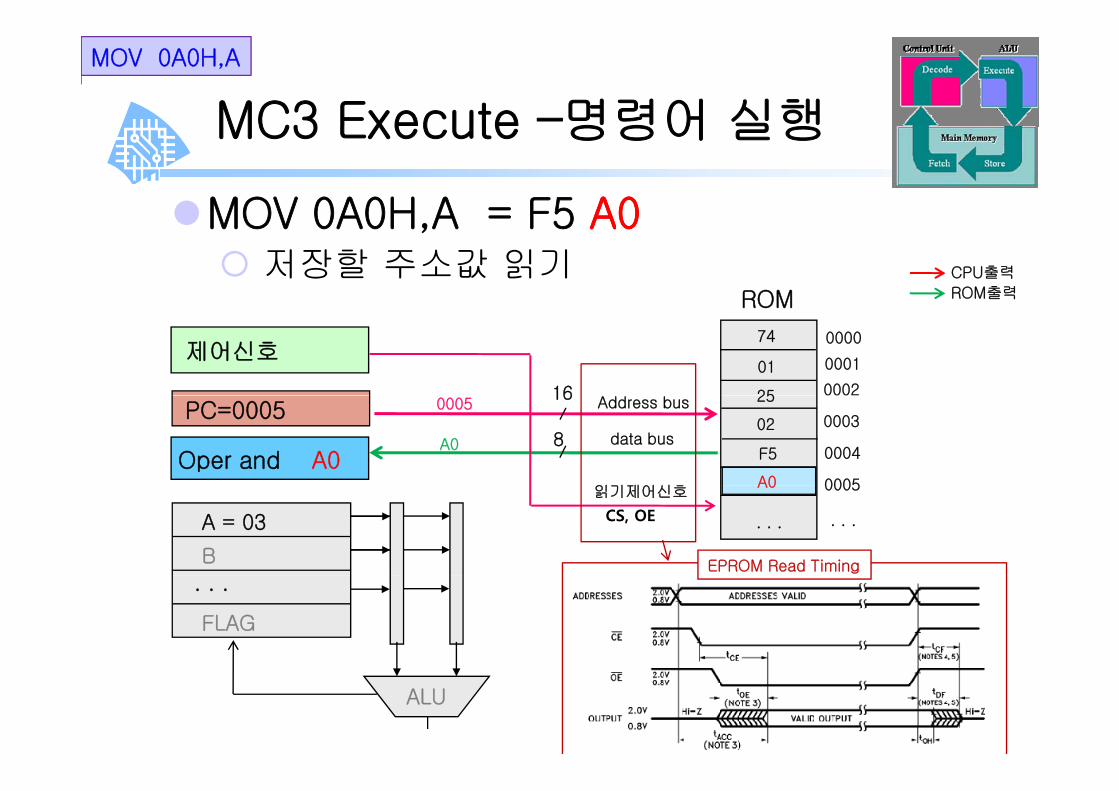
MC3 Execute 명령어 실행
MOV 0A0H A = F5 AA00MOV 0A0H,A = F5 AA00저장할 주소값 읽기 CPU출력
ROM출력ROM
제어신호
16 25
01
74 0000
0001
0002
ROM
Address busPC=0005data bus
읽기제어신호
16
8
0005
A0
25
02 0003
F5
A0
0004
0005
Oper and A0
B
A = 03
읽기제어신호
CS, OE
EPROM Read Timing
. . . . . .
A0 0005
. . .
FLAG
ALU

MC4 Store –데이터 저장
MOV 0A0H,A
MC4 Store 데이터 저장
MOV 0A0H A = F5 A0MOV 0A0H,A = F5 A0읽힌 주소값(A0)을 이용 RAM 쓰기
CPU출력
8051의 RAM은내부에 있는 것이므로 8비트 주
제어신호
8/16
CPU출력CPU 출력
A0 25
01
749E
9F
A0
내부RAM
00
30
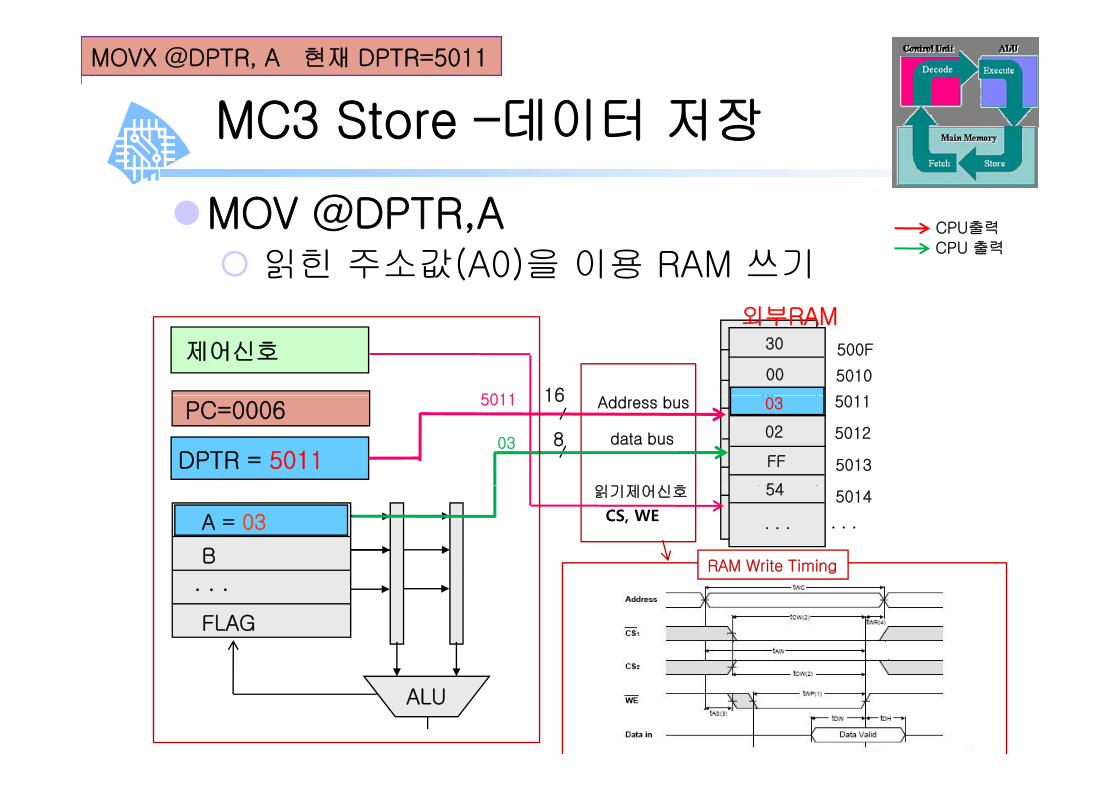
이므로 8비트 주소값을 갖는다.그러나 통상 8비트 CPU는 주소
Address busPC=0006data bus
읽기제어신호
8/16
8
A0
03
25
02
A0
A1
F5
A0A2Oper and A0
02
FF
54
03 는 16비트이다.
B
A = 03
읽기제어신호
CS, WE . . . . . .
A0A3
. . .
54
RAM Write Timing. . .
FLAG
ALU
MC3 Store –데이터 저장
MOVX @DPTR, A 현재 DPTR=5011
MC3 Store 데이터 저장
MOV @DPTR AMOV @DPTR,A 읽힌 주소값(A0)을 이용 RAM 쓰기
CPU출력CPU 출력
제어신호
165011 25
01
74500F
5010
5011
외부RAM
00
30
Address busPC=0006data bus
읽기제어신호
16
8
5011
03
25
02
5011
5012
F5
A05013DPTR = 5011
02
FF
54
03
B
A = 03
읽기제어신호
CS, WE . . . . . .
A05014
. . .
54
RAM Write Timing. . .
FLAG
ALU
PC 값이 자동으로 진행하지 않는 경우PC 값이 자동으로 진행하지 않는 경우
PC는 CPU가 실행하면서 현재 실행 시점에서자동으로 증가하면 다음 명령을 실행
필요에 따라 다음 명령이 아닌 곳으로 실행을옮길 필요가 있는데 이것은 기계어 명령에 따라이루어 진다.
Jump 명령
CALL / RET 명령
8비트 CPU의 PC 는 16비트 레지스터 이므로8비트 CPU의 PC 는 16비트 레지스터 이므로최대 64K 바이트 내에서 기계어 코드가 실행된다.된다.
CPU의 기본 이론CPU의 기본 이론
플래그플래그 (FLAG)(FLAG)플래그플래그 (FLAG)(FLAG)

플래그(FLAG)의 개념과 종류플래그(FLAG)의 개념과 종류
ALU 산술연산, 논리연산, 쉬프트 등의 결과로발생되는 상태를 나타내고 CPU에 저장하여, 이 상태를 사용하는 명령에 의해 명령 고려 시참조된다.
수학적 2진법 계산에서 주로 언급되는 이론
수학적 계산을 할 때, 디지털 회로에서 정해진수학적 계산을 할 때, 디지털 회로에서 정해진비트로 설정하고 계산한다.
CPU 마다 취급되는 종류는 약간씩 다르나 기CPU 마다 취급되는 종류는 약간씩 다르나 기본적인 것은 모두 가지고 있다.
플래그의 종류플래그의 종류
C (C ) 어떤 연산결과 맨 앞의 비트 계산 결과 발생되C (Carry) : 어떤 연산결과 맨 앞의 비트 계산 결과 발생되는 자리 올림 값.
더하기 할 때는 carry더하기 할 때는 carry
빼기 할 때는 borrow
Z (Zero) : 계산 결과가 모두 0일 때Carry비트는 제외
V (Overflow) : 계산 결과 레지스터가 취급할 수 값의 범위를 넘었을 때 발생를 넘었을 때 발생
S (Sign) : 맨 앞의 비트(MSB)가 1일 때 음수를 나타낸다.
P (Parity) : 계산 결과 값에서 1의 개수가 홀수 개 인지 짝P (Parity) : 계산 결과 값에서 1의 개수가 홀수 개 인지 짝수개 인지를 나타낸다.
AC(Auxiliary Carry) : 8비트 CPU에서 3번째 비트를 연산한 결과의 Carry/Borrow 값
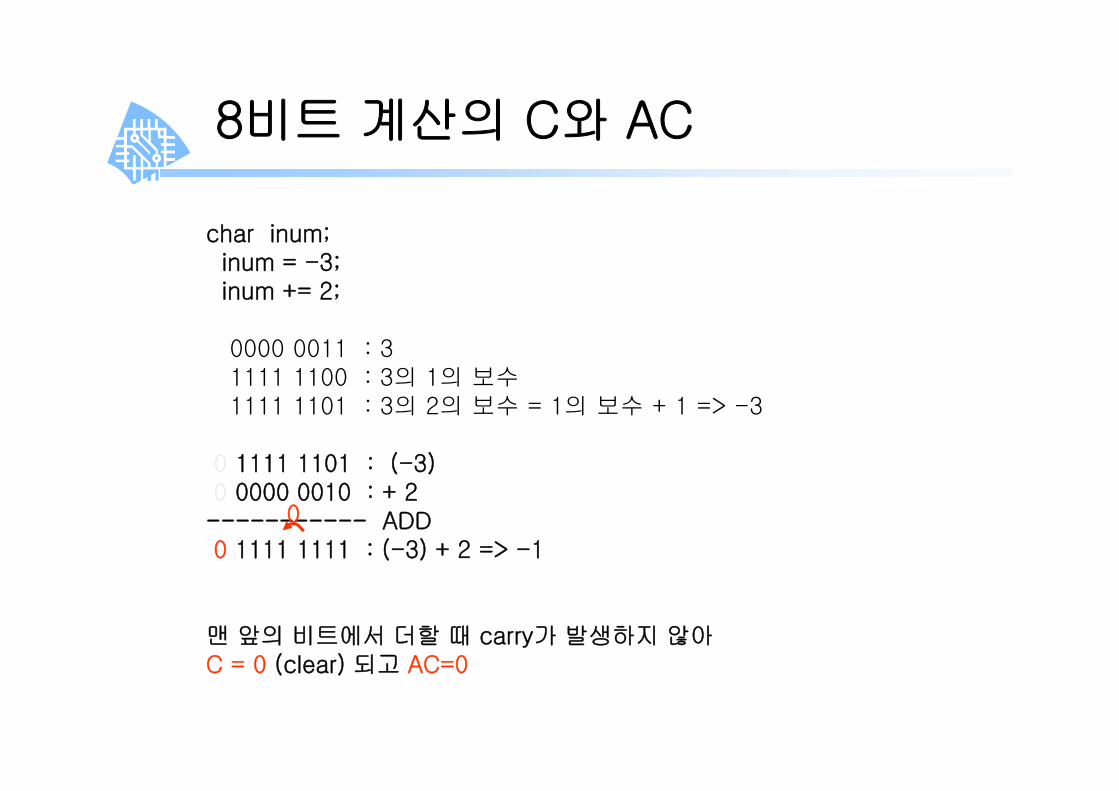
8비트 계산의 C와 AC8비트 계산의 C와 AC
char inum;inum = -3;inum += 2;
0000 0011 : 31111 1100 : 3의 1의 보수1111 1101 : 3의 2의 보수 = 1의 보수 + 1 => -3
0 1111 1101 : (-3) 0 0000 0010 20 0000 0010 : + 2----------- ADD0 1111 1111 : (-3) + 2 => -1
0
맨 앞의 비트에서 더할 때 carry가 발생하지 않아C = 0 (clear) 되고 AC=0C = 0 (clear) 되고 AC=0
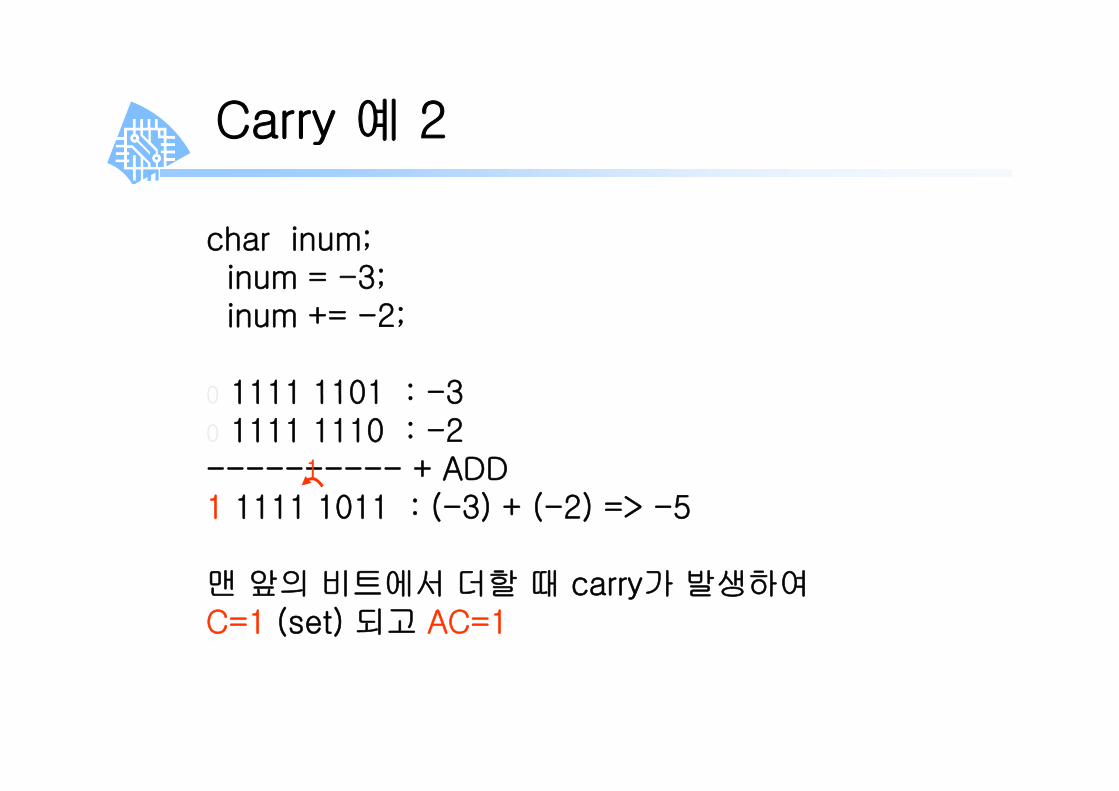
Carry 예 2Carry 예 2
char inum;inum = -3;i 2inum += -2;
0 1111 1101 : -30 1111 1101 : 30 1111 1110 : -2---------- + ADD1
1 1111 1011 : (-3) + (-2) => -5
맨 앞의 비트에서 더할 때 가 발생하여맨 앞의 비트에서 더할 때 carry가 발생하여C=1 (set) 되고 AC=1
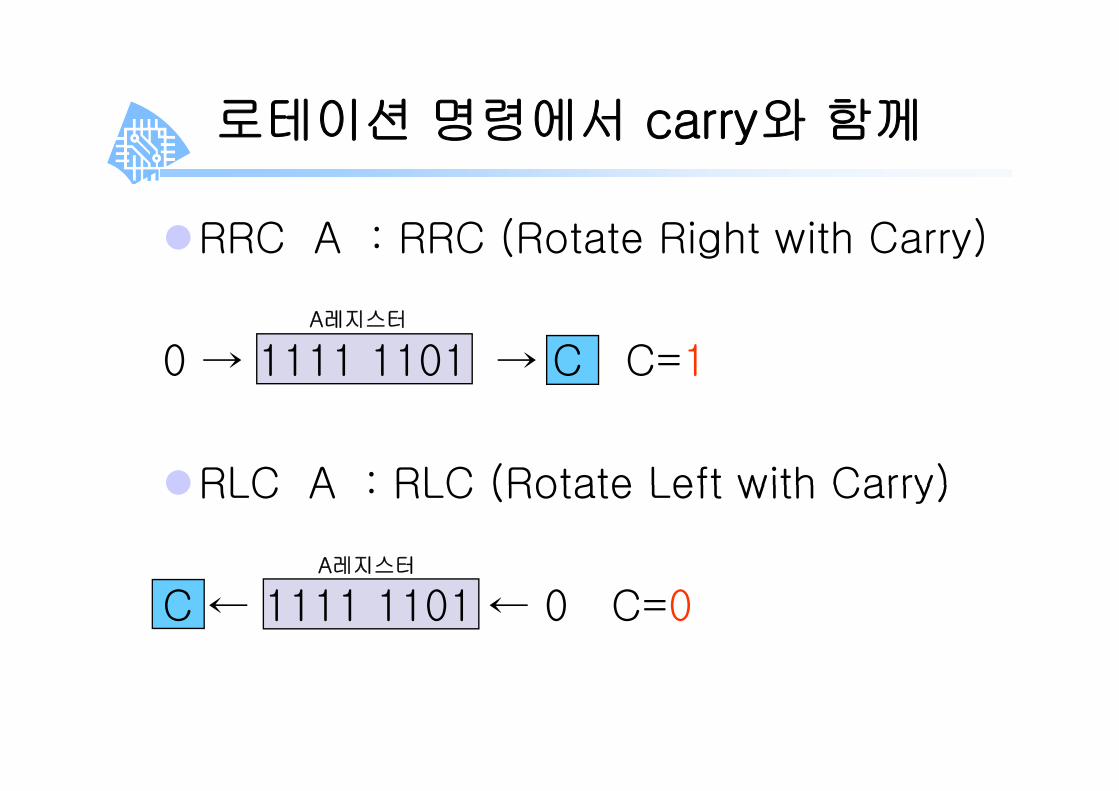
로테이션 명령에서 carry와 함께로테이션 명령에서 carry와 함께
RRC A : RRC (Rotate Right with Carry)
0 → 1111 1101 → C C=1A레지스터
RLC A : RLC (Rotate Left with Carry)RLC A : RLC (Rotate Left with Carry)
A레지스터
C ← 1111 1101 ← 0 C=0
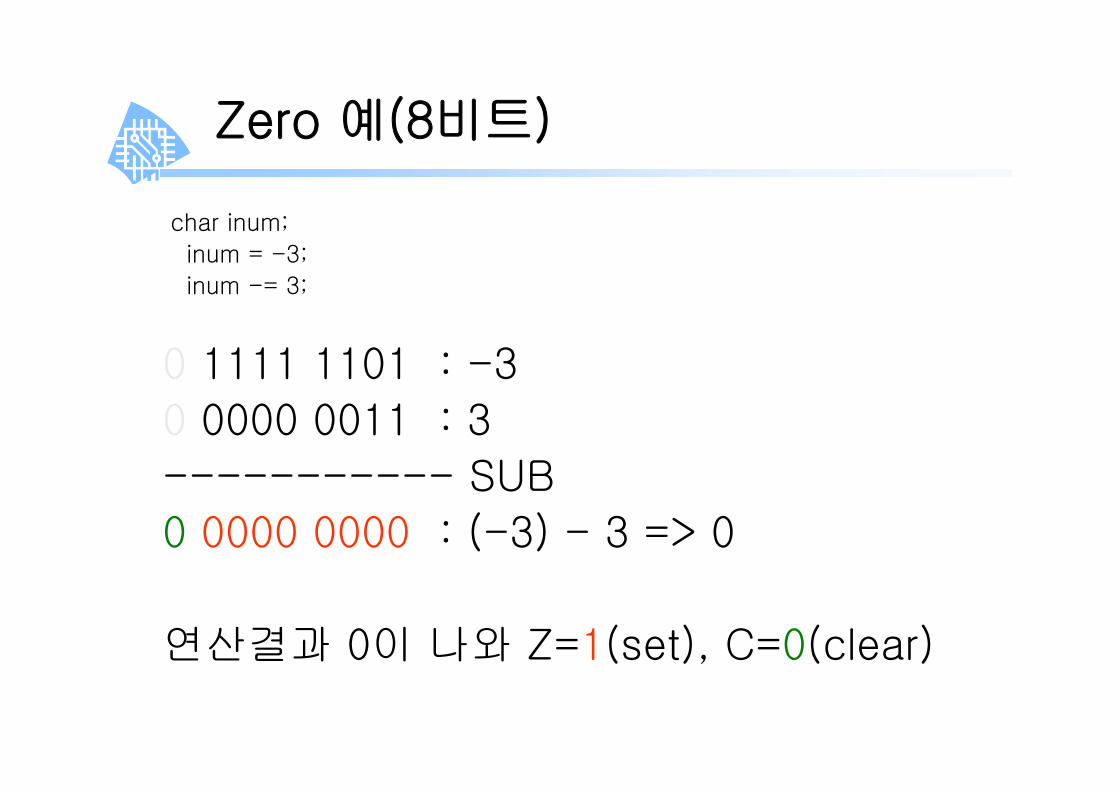
Zero 예(8비트)Zero 예(8비트)
h i ;char inum;
inum = -3;
inum -= 3;
0 1111 1101 : -3
0 0000 0011 : 3
----------- SUBSUB
0 0000 0000 : (-3) - 3 => 0
연산결과 0이 나와 Z=1(set), C=0(clear)
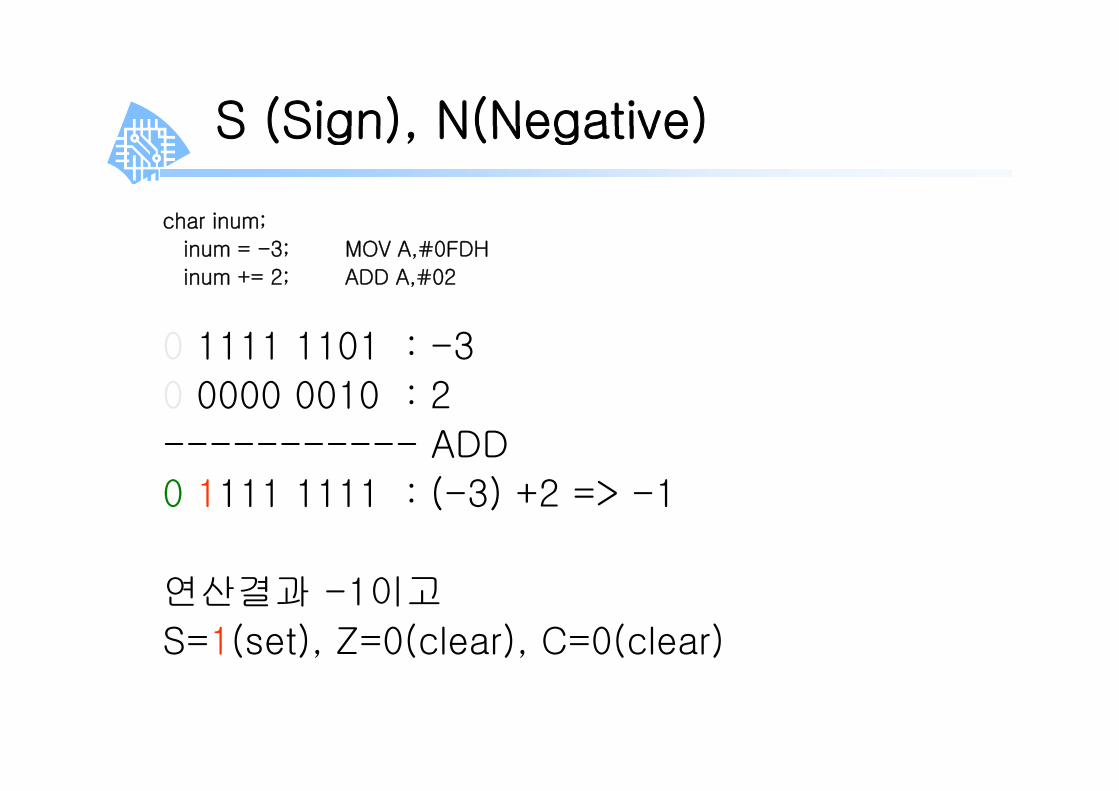
S (Sign) N(Negative)S (Sign), N(Negative)
h i ;char inum;
inum = -3; MOV A,#0FDH
inum += 2; ADD A,#02
0 1111 1101 : -3
0 0000 0010 : 20 0000 0010 : 2
----------- ADD
0 1111 1111 : ( 3) +2 > 10 1111 1111 : (-3) +2 => -1
연산결과 -1이고
S=1(set), Z=0(clear), C=0(clear)
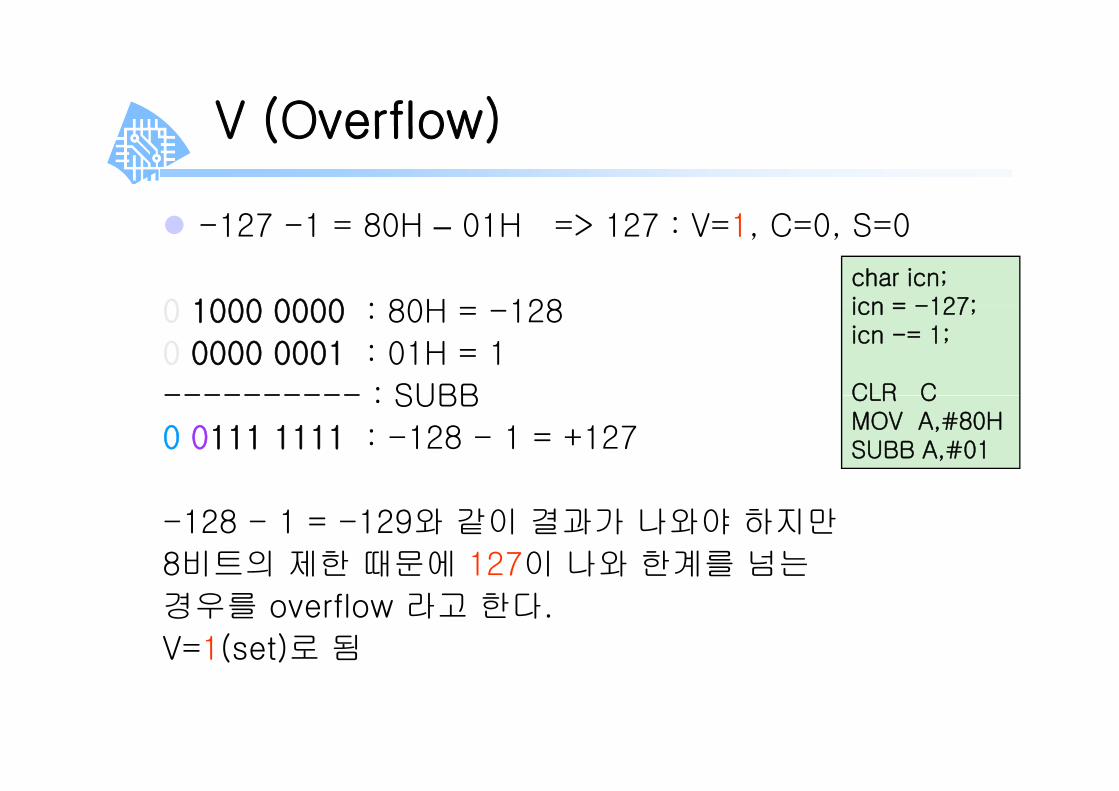
V (Overflow)V (Overflow)
127 1 80H 01H > 127 V 1 C 0 S 0-127 -1 = 80H – 01H => 127 : V=1, C=0, S=0
0 1000 0000 : 80H 128char icn;icn = -127;0 1000 0000 : 80H = -128
0 0000 0001 : 01H = 1
---------- : SUBB
icn = -127;icn -= 1;
CLR C---------- : SUBB
0 0111 1111 : -128 - 1 = +127
CLR CMOV A,#80HSUBB A,#01
-128 - 1 = -129와 같이 결과가 나와야 하지만
8비트의 제한 때문에 127이 나와 한계를 넘는8비 의 제한 때문에 1 7이 나와 한계를 넘는
경우를 overflow 라고 한다.
V=1(set)로 됨

V (Overflow)V (Overflow)
126 3 127 V 1 C 0 S 1126 +3 = -127 : V=1, C=0, S=1
0 0111 1110 : 126
char icn;icn = 126;icn += 3;
0 0111 1110 : 126
0 0000 0011 : 3
---------- : ADD
CLR CMOV A,#126SUBB A #03---------- : ADD
0 1000 0001 : 126 + 3 = -127
SUBB A,#03
126 + 3 = 129와 같이 결과가 나와야 하지만
8비트의 제한 때문에 -127이 나와 127보다 큰 수가8비 의 제한 때문에 1 7이 나와 1 7 다 큰 수가
될 수 없고 한계를 넘는 경우를 overflow 라고 한다.
V=1(set)로 됨

P (Even Parity )P (Even Parity )
char inum;char inum;inum = -3; MOV A,#0FDHinum += 2; ADD A,#02
0 1111 1101 : -30 0000 0010 : 2----------- ADD 0 1111 1111 : (-3) +2 => -1
연산결과 값은 -1이고, 1의 개수가 8개로 짝수이다. 이 때 P=1로 set 됨.
P=1(set), S=1(set), Z=0(clear), C=0(clear)
CPU의 기본 이론CPU의 기본 이론
스택스택 (Stack)(Stack)스택스택 (Stack)(Stack)
스택 이란스택 이란
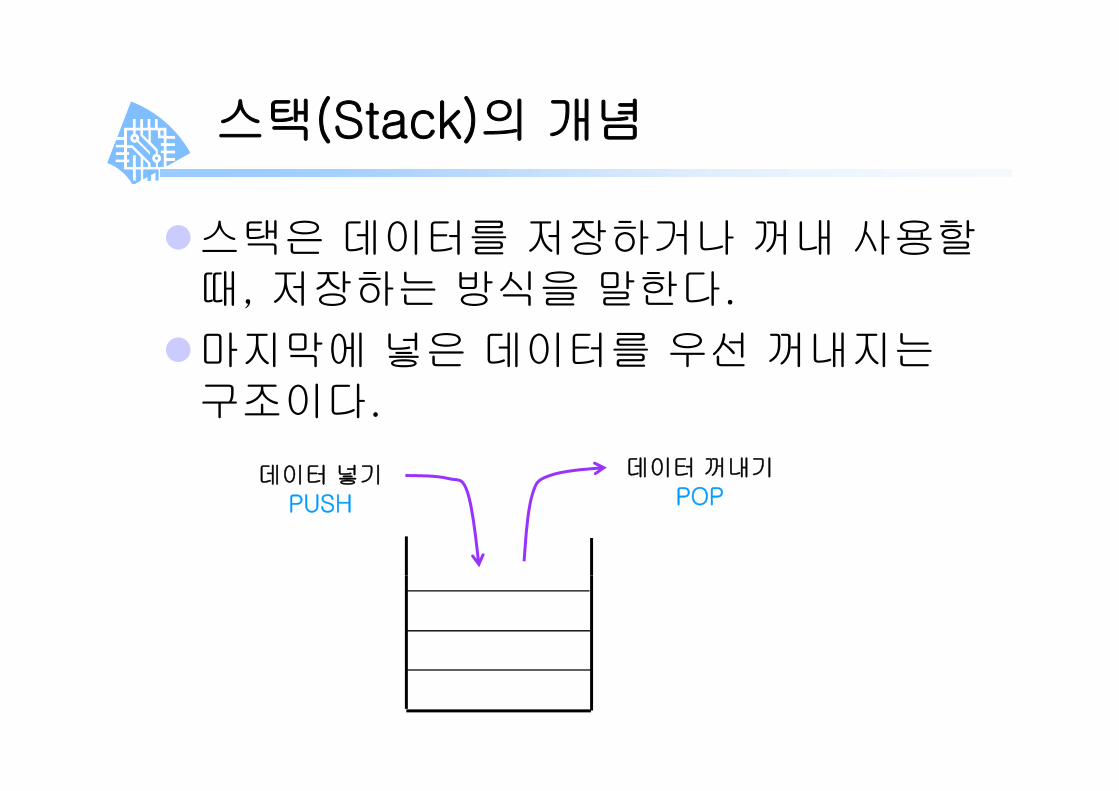
스택(Stack)의 개념스택(Stack)의 개념
스택은 데이터를 저장하거나 꺼내 사용할때, 저장하는 방식을 말한다.때, 저장하 방식 다
마지막에 넣은 데이터를 우선 꺼내지는구조이다구조이다.
데이터 넣기 데이터 꺼내기
PUSH POP
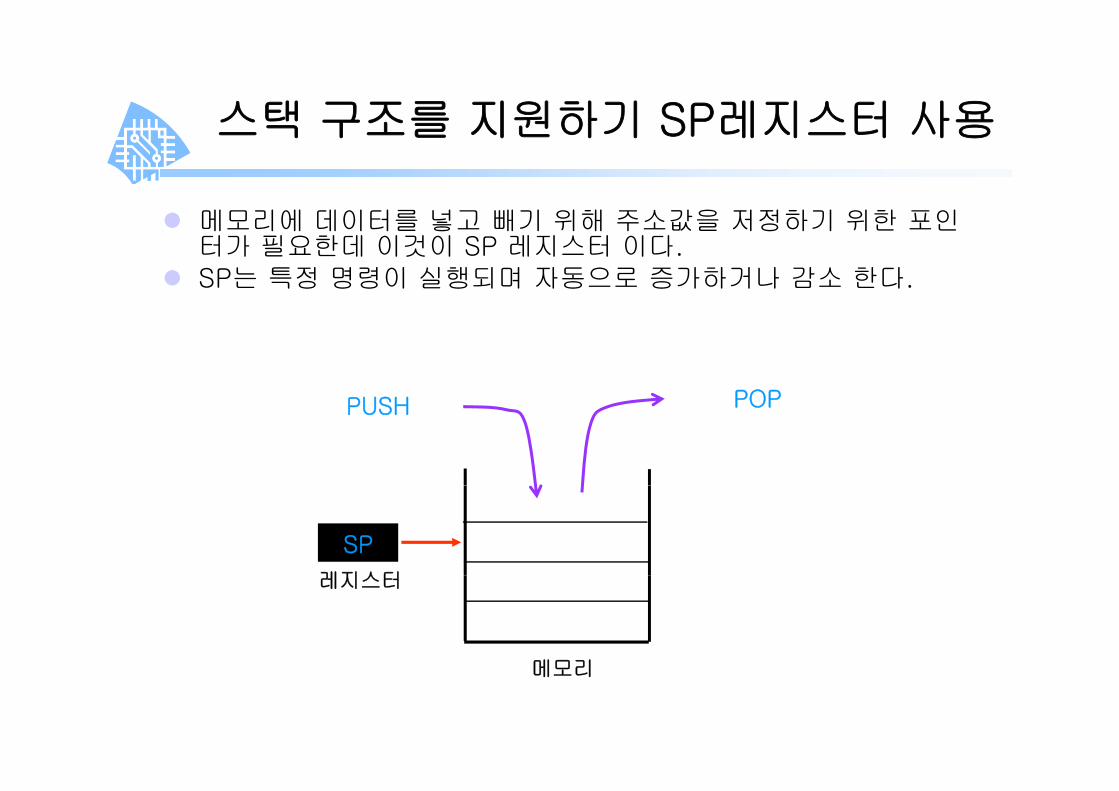
스택 구조를 지원하기 SP레지스터 사용스택 구조를 지원하기 SP레지스터 사용
메모리에 데이터를 넣고 빼기 위해 주소값을 저정하기 위한 포인메모리에 데이터를 넣고 빼기 위해 주소값을 저정하기 위한 포인터가 필요한데 이것이 SP 레지스터 이다.SP는 특정 명령이 실행되며 자동으로 증가하거나 감소 한다.
POPPUSH POP
SP
레지스터
메모리
레지스터
메모리

8비트 CPU의 스택의 억세스 순서8비트 CPU의 스택의 억세스 순서
스택에 넣을 때는 PUSH 명령을 사용 한다스택에 넣을 때는 PUSH 명령을 사용 한다.
MOV A,#10PUSH A
PUSH
MOV SP,#00FFH PUSH A 실행 과정
PUSH
00FC
주소
00FC
주소
00FC
주소
00FE
00FD
00FC
SP 00FE
00FD
00FC
SP00FE 00FE
00FDSP
00FF
메모리
00FF 00FF 00FF
SP
10 00FF10
1 SP가 가리키는 2 SP가 1이 자동감소
XX
1. SP가 가리키는주소에 10을 넣는다.
2. SP가 1이 자동감소

스택의 억세스 순서 step2스택의 억세스 순서 step2
기계어 데이터를 꺼내려면 POP 명령을 사용기계어 데이터를 꺼내려면 POP 명령을 사용
POP A 실행 과정
읽기
POP APOP A 실행 과정
10
A
00FC
주소
00FC
주소
SP
00FE
00FD
00FC
SP00FE
00FF
00FE
00FDSP
1000FF 00FF10
00FF10
2. SP가 가리키는1. SP가 1이 자동증가 3. 읽혀진 값을
00FF
. SP가 가리키는주소에서 값을 읽는다 A에 저장
8051 스택의 억세스 순서8051 스택의 억세스 순서
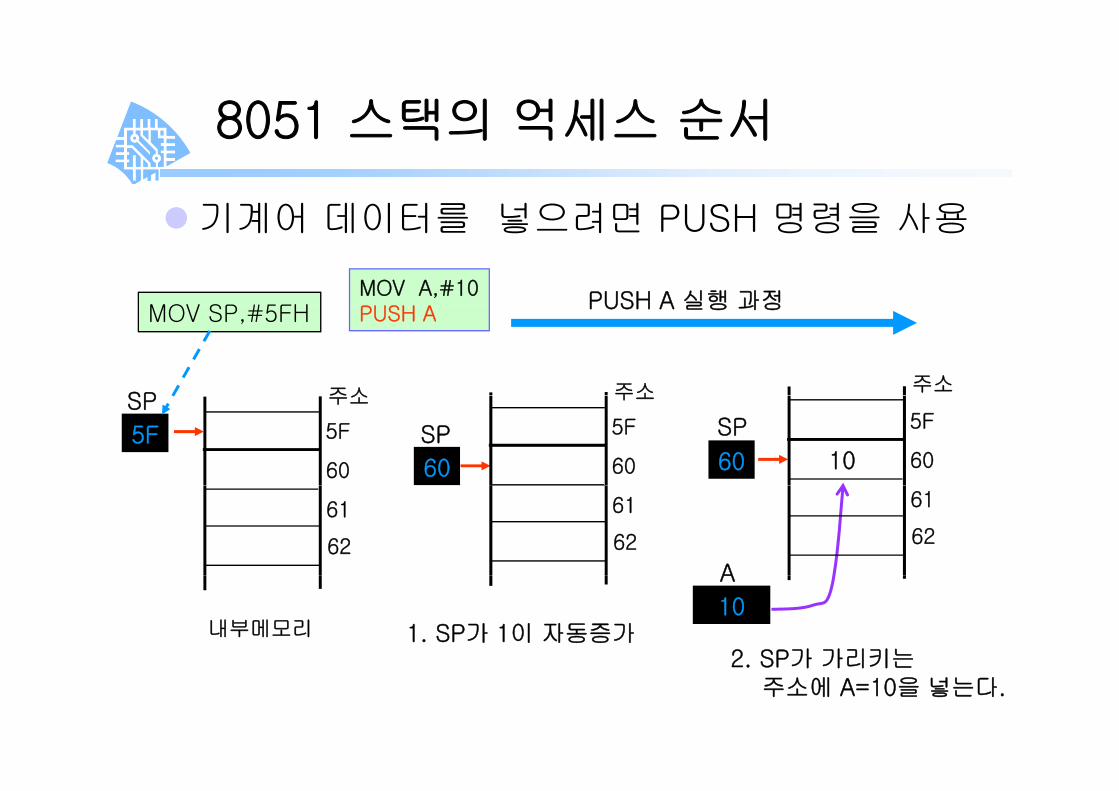
기계어 데이터를 넣으려면 PUSH 명령을 사용기계어 데이터를 넣으려면 PUSH 명령을 사용
MOV SP #5FHMOV A,#10PUSH A
PUSH A 실행 과정
주소
MOV SP,#5FH
SP
PUSH APUSH A 실행 과정
주소주소
5F 5F
60
주소SP
60
SP
60
SP5F
6010
5F
60
주소
62
6162
61
62
61
A
내부메모리
2. SP가 가리키는1. SP가 1이 자동증가
10
A
2. SP가 가리키는주소에 A=10을 넣는다.
8051스택의 억세스 순서 step28051스택의 억세스 순서 step2
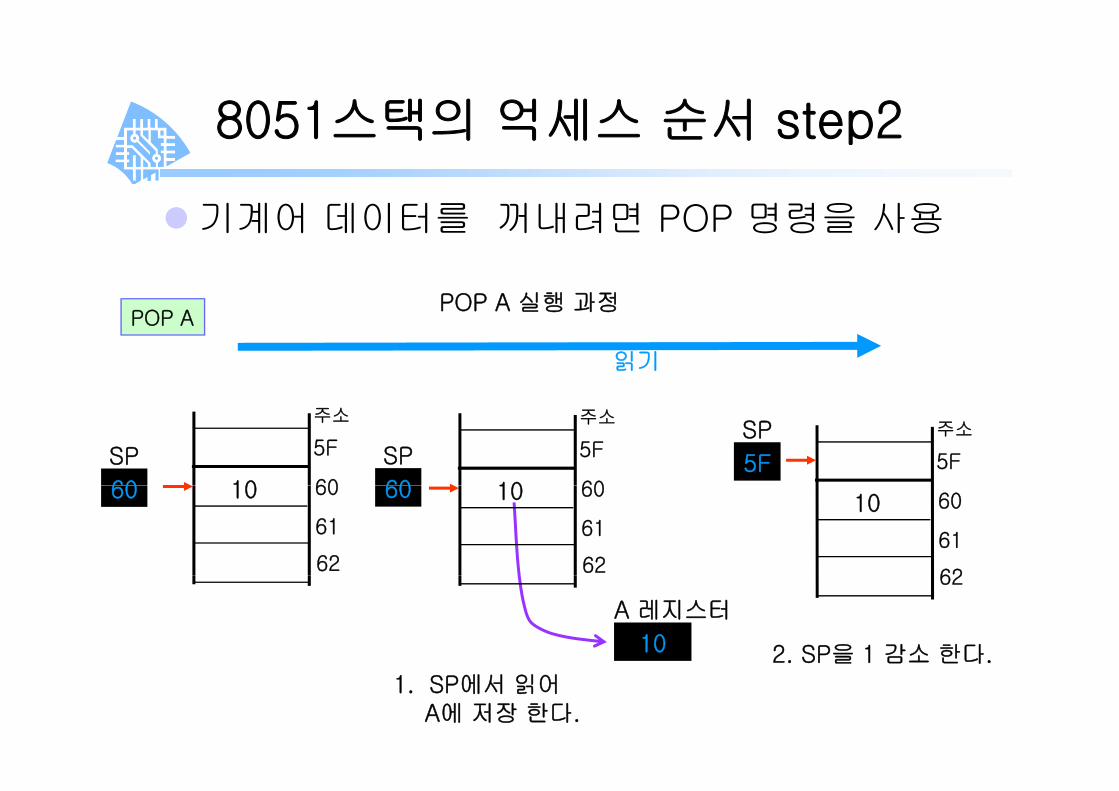
기계어 데이터를 꺼내려면 POP 명령을 사용기계어 데이터를 꺼내려면 POP 명령을 사용
POP A 실행 과정
읽기
POP APOP A 실행 과정
주소
60 60
SP 5F
10
주소
60 60
SP 5F
10
주소
5F
SP
5F
60
62
61
6010 60
62
61
6010
62
61
6010
10
A 레지스터
2. SP을 1 감소 한다.
62
1. SP에서 읽어A에 저장 한다.
CPU의 기본 이론CPU의 기본 이론
CPUCPU 레지스터레지스터 예예CPU CPU 레지스터레지스터 예예
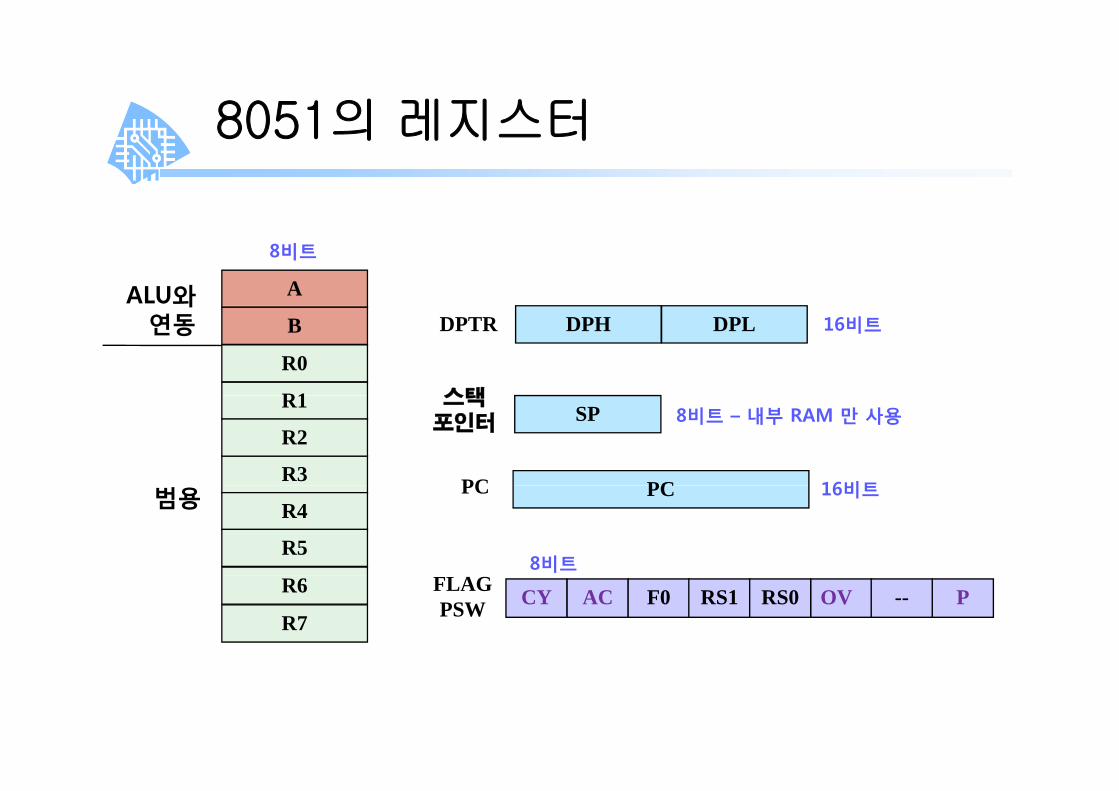
8051의 레지스터8051의 레지스터
AALU와
8비트
B
R0
R1
DPH DPLDPTR
스택
와연동 16비트
R1
R3
R2
PCPC 16비트
SP스택
포인터 8비트 – 내부 RAM 만 사용
R4
R5
PCPC 16비트범용
8비트
R7
R6 CY AC F0 RS1 OVRS0 P--FLAGPSW
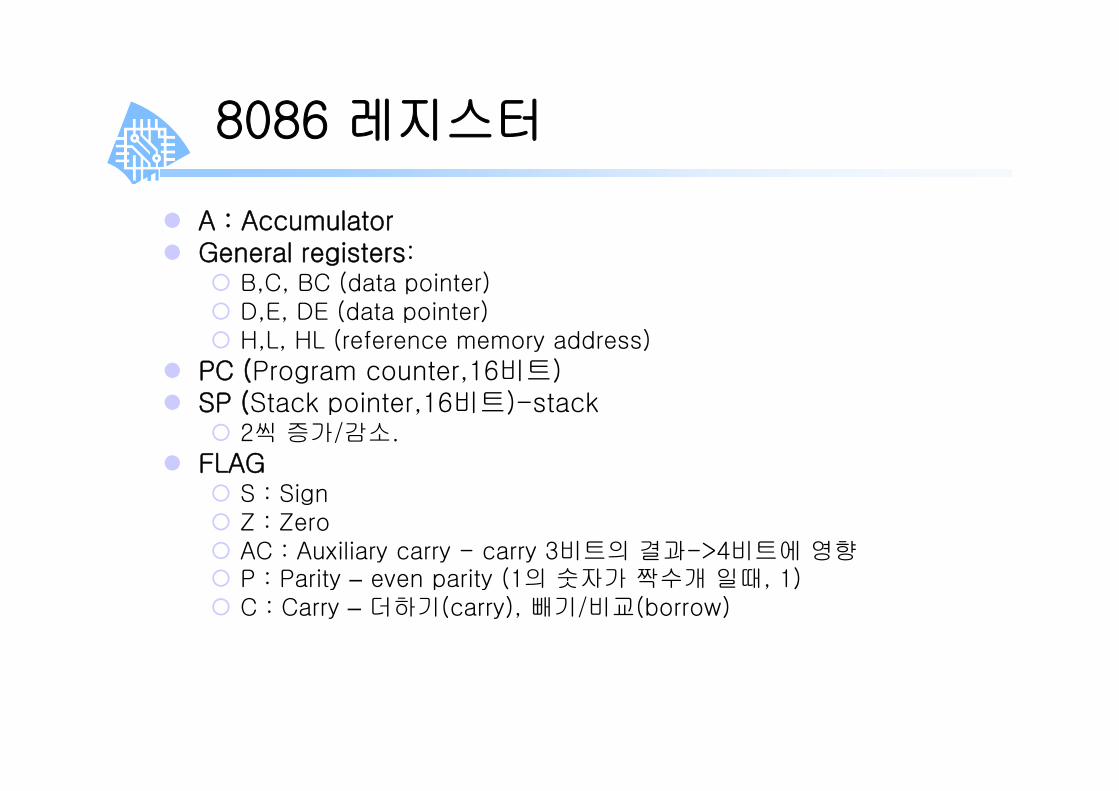
8086 레지스터8086 레지스터
A : AccumulatorA : AccumulatorGeneral registers:
B,C, BC (data pointer) D E DE (d t i t )D,E, DE (data pointer) H,L, HL (reference memory address)
PC (Program counter,16비트)SP (St k i t 16비트) t kSP (Stack pointer,16비트)-stack
2씩 증가/감소.
FLAGS SiS : SignZ : Zero AC : Auxiliary carry - carry 3비트의 결과->4비트에 영향P : Parity even parity (1의 숫자가 짝수개 일때 1)P : Parity – even parity (1의 숫자가 짝수개 일때, 1) C : Carry – 더하기(carry), 빼기/비교(borrow)
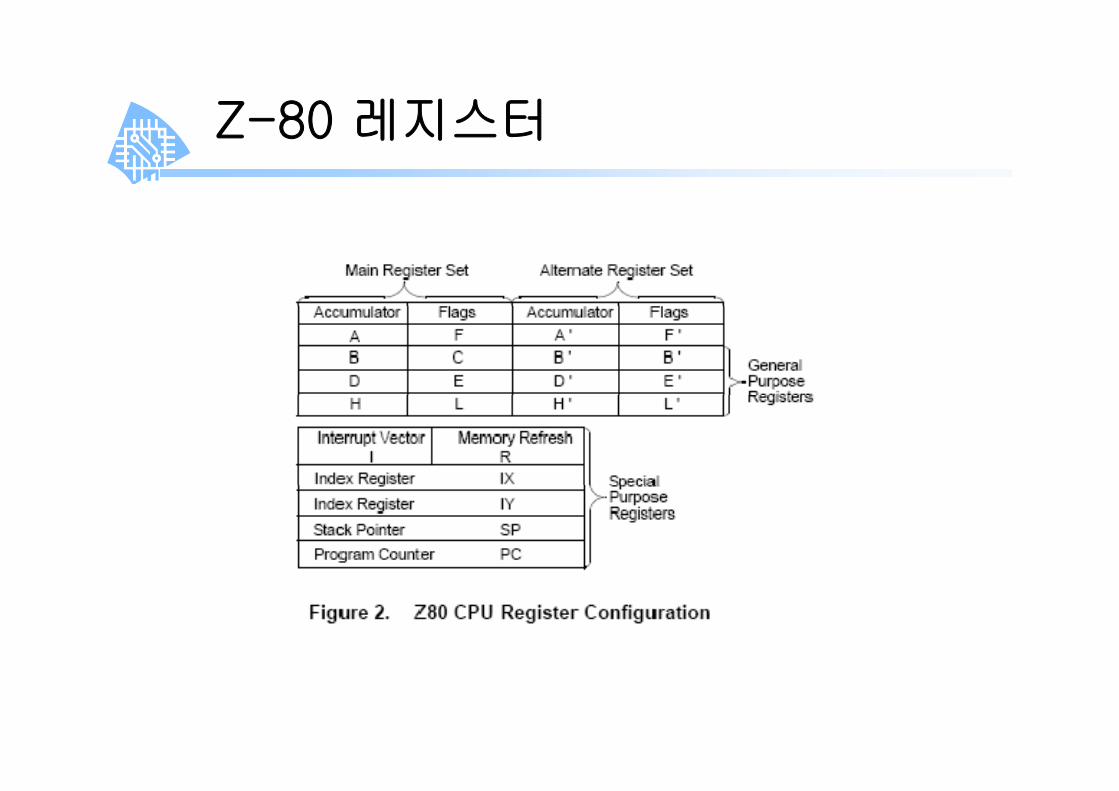
Z-80 레지스터Z 80 레지스터

Z-80 플래그Z 80 플래그
Carry
ZeroZero
Minus
Parity/overflow
Half carryHalf-carry

Z-80 칩의 구조Z 80 칩의 구조
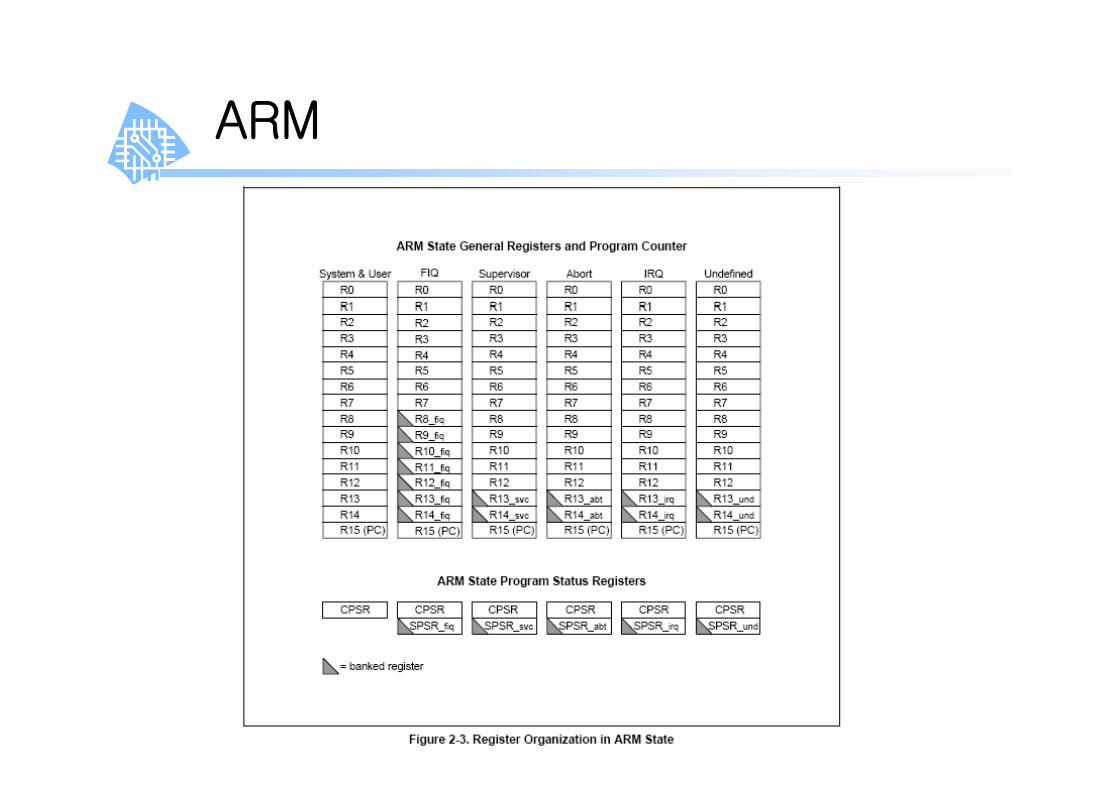
ARMARM

ARM의 상태 레지스터ARM의 상태 레지스터

CPU의 기본 이론CPU의 기본 이론
메모리메모리메모리메모리
• EPROM (8비트의 시스템에서 주로 사용)• SRAM (8비트의 시스템에서 주로 사용)SRAM (8비트의 시스템에서 주로 사용)• DRAM (ARM등 임베디드 시스템에서 주로 사용)
고 용량의 메모리에 필요

메모리의 엑세스메모리의 엑세스
CPU가 프로그램을 읽어 실행하기 위해필요
변수의 값을 설정 하기 위해MOV/MOVX등의 값 설정MOV/MOVX등의 값 설정
스택을 사용할 경우PUSH/POP 명령에 의한 스택 사용
CALL/RET에 의한 복귀 주소 처리CALL/RET에 의한 복귀 주소 처리
인터럽트/RETI 에 의한 복귀 주소 처리
CPU는 억세스 하기 위한 신호CPU는 억세스 하기 위한 신호
현재 메모리의 억세스 인가를 나타내는 신호와현재 메모리의 억세스 인가를 나타내는 신호와억세스 방향(read/write)
Z80 : MREQ RD WRZ80 : MREQ, RD, WRMREQ=0이고 RD=0,WR=1인 동안 메모리 읽기
MREQ=0이고 WR=0 RD=1인 동안 메모리 쓰기MREQ 0이고 WR 0,RD 1인 동안 메모리 쓰기
프로그램과 데이터/변수영역의 구분이 없다.
8051 : RD, WR, PSEN, ALE프로그램 메모리와 데이터/변수 영역 구분 있음
RD=0이고 WR=1,PSEN=1 : 데이터 메모리 읽기
RD=1이고 WR=0 PSEN=1 : 데이터 메모리 쓰기RD=1이고 WR=0,PSEN=1 : 데이터 메모리 쓰기
RD=0이고 WR=1,PSEN=0 : 프로그램 메모리 읽기
RD=1이고 WR=0,PSEN=0 : 프로그램 메모리 쓰기
CPU와 메모리CPU와 메모리
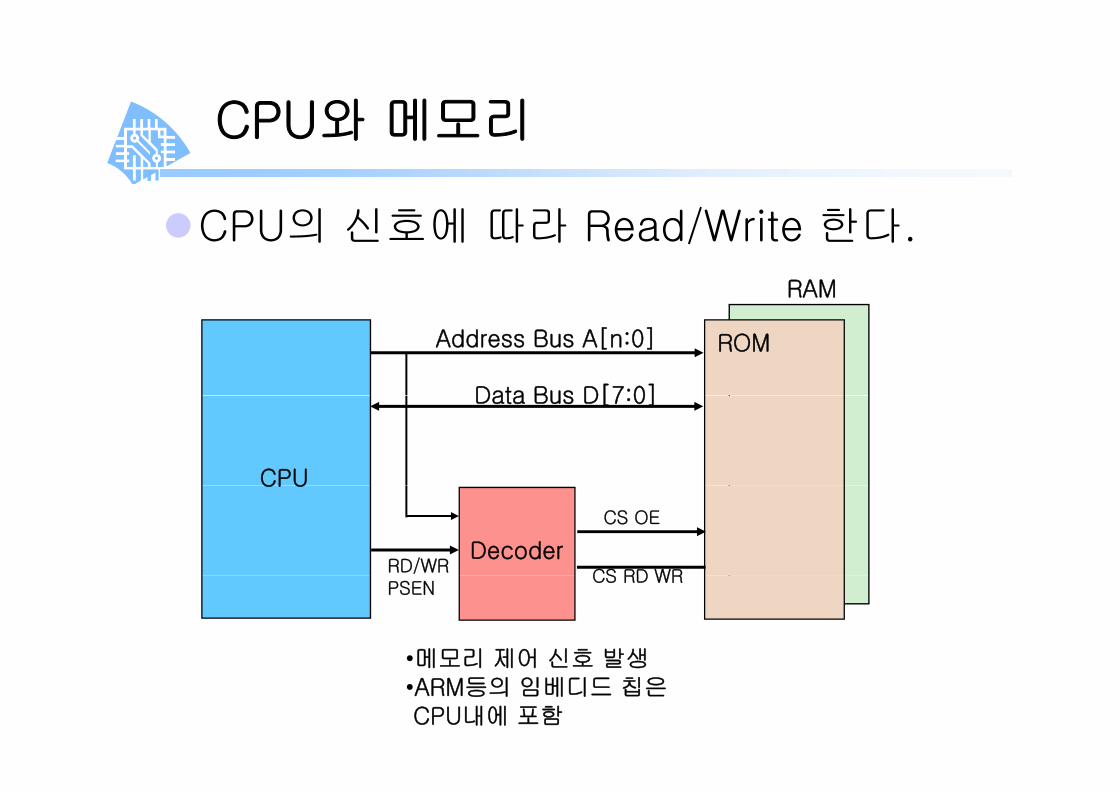
CPU의 신호에 따라 R d/W it 한다CPU의 신호에 따라 Read/Write 한다.
RAM
ROMAddress Bus A[n:0]
Data Bus D[7:0]
CPU
Data Bus D[7:0]
CPU
DecoderRD/WR
CS OE
CS RD WR
•메모리 제어 신호 발생
PSENCS RD WR
메모리 제어 신호 발생•ARM등의 임베디드 칩은CPU내에 포함
메모리의 구조 – 신호메모리의 구조 신호
메모리는 여러 개의 데이터 저장이 필요하므로메모리는 여러 개의 데이터 저장이 필요하므로각 데이터의 위치를 결정하기 위한 주소 값이필요- Address Bus필요 Address Bus한 번에 읽거나 쓰기 때, 여러 비트의 데이터 처리를 위해 데이터 신호가 필요 – Data Bus ( )(1,8,16,32비트)읽거나 쓸 때 정확한 시점을 결정하기 위한 신호 ( CS Chip Selector)호 ( CS – Chip Selector)RAM의 경우 읽거나 쓰기를 결정하기 위한 신호 (RD / WR )호 (RD / WR )ROM의 경우 읽을 때, 데이터의 출력을 결정하기 위한 신호 (OE)기 위한 신호 (OE)
EPROMEPROM
EPROM
읽는 것은 가능하나 쓰기는 별도의 장치 사용
전원이 공급되지 않아도 데이터 유지전원이 공급되지 않아도 데이터 유지
별도의 자외선에 의해 지움
메모리의 구조 –ROM 신호메모리의 구조 ROM 신호
A[ 0] Add B 신호의 라인수는 칩의A[n:0] – Address Bus : 신호의 라인수는 칩의용량과 관계가 있다.
D[7 0] D t B 한번에 8비트 단위로 읽D[7:0] – Data Bus : 한번에 8비트 단위로 읽는다.
CS (CE) 읽거나 쓰는 시점을 결정한다CS (CE) : 읽거나 쓰는 시점을 결정한다. Active 에서만 데이터를 읽거나 쓴다.
OE(O t t E bl ) 읽을 때 데이터를 출력OE(Output Enable) : 읽을 때 데이터를 출력한다. 이것이 deactive되면 데이터 버스는 끊어진다(하이 임피던스)진다(하이 임피던스).
CS, OE의 신호는 0일 때 active 된다.
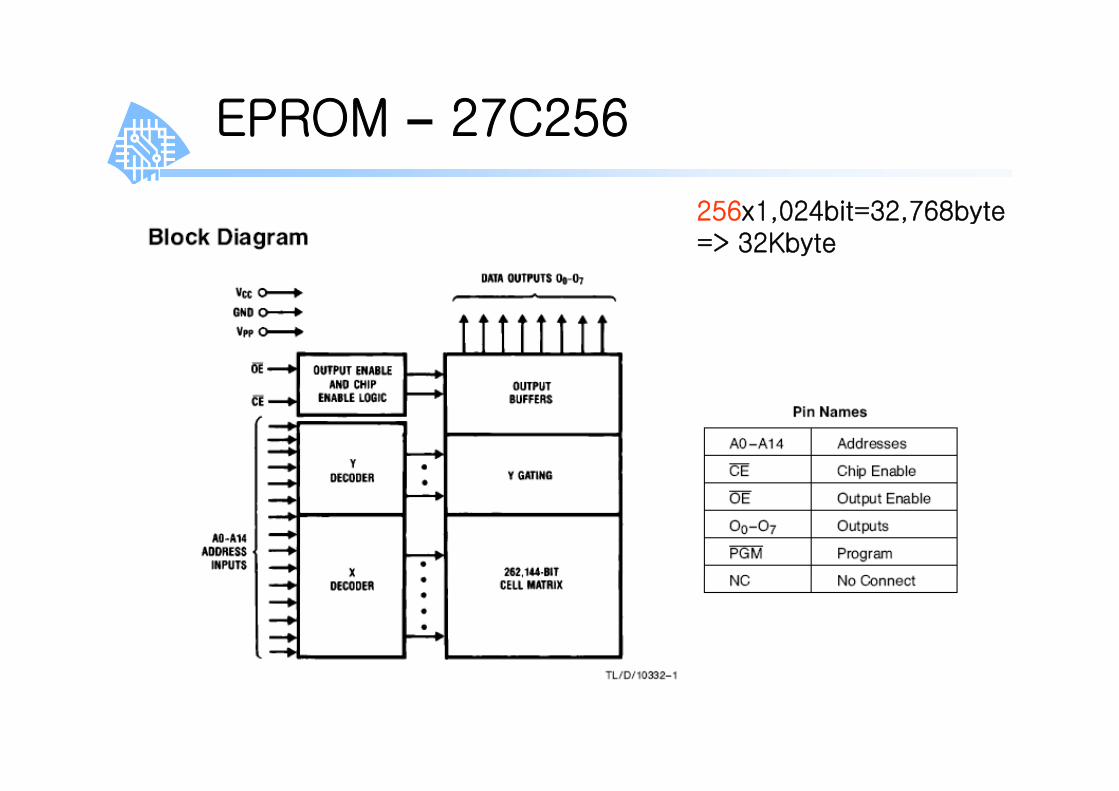
EPROM – 27C256EPROM 27C256
256x1 024bit=32 768byte256x1,024bit 32,768byte=> 32Kbyte
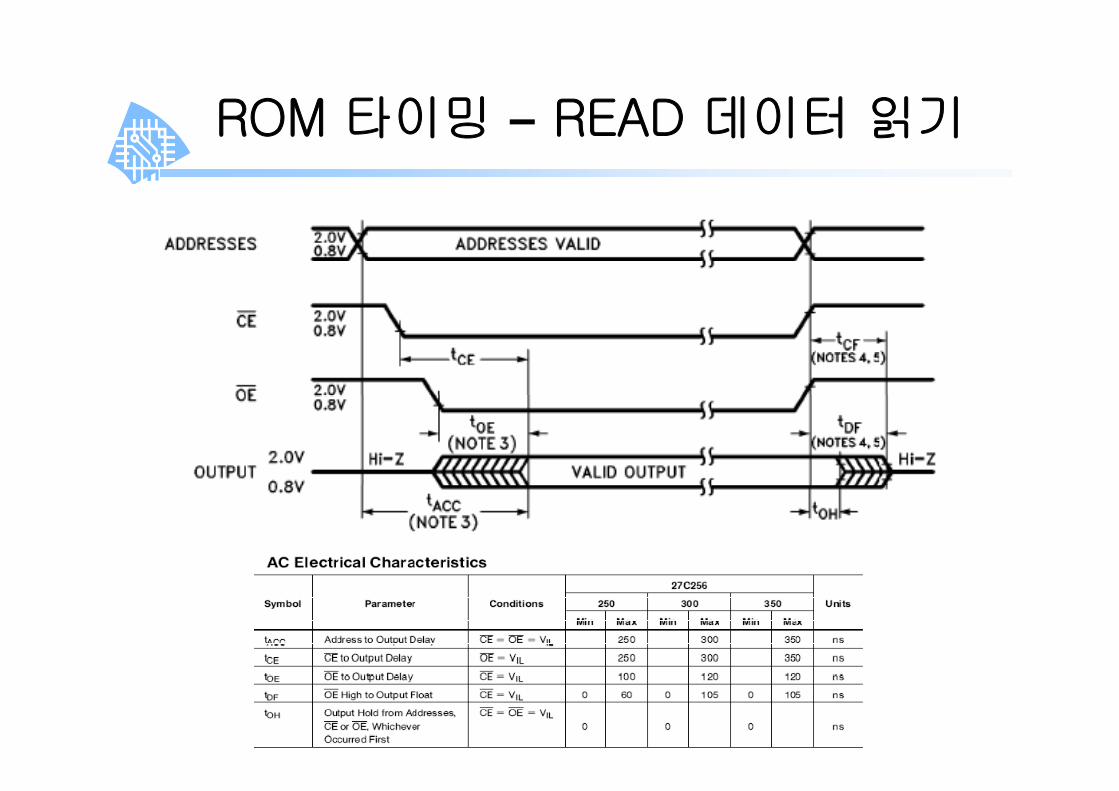
ROM 타이밍 – READ 데이터 읽기ROM 타이밍 READ 데이터 읽기
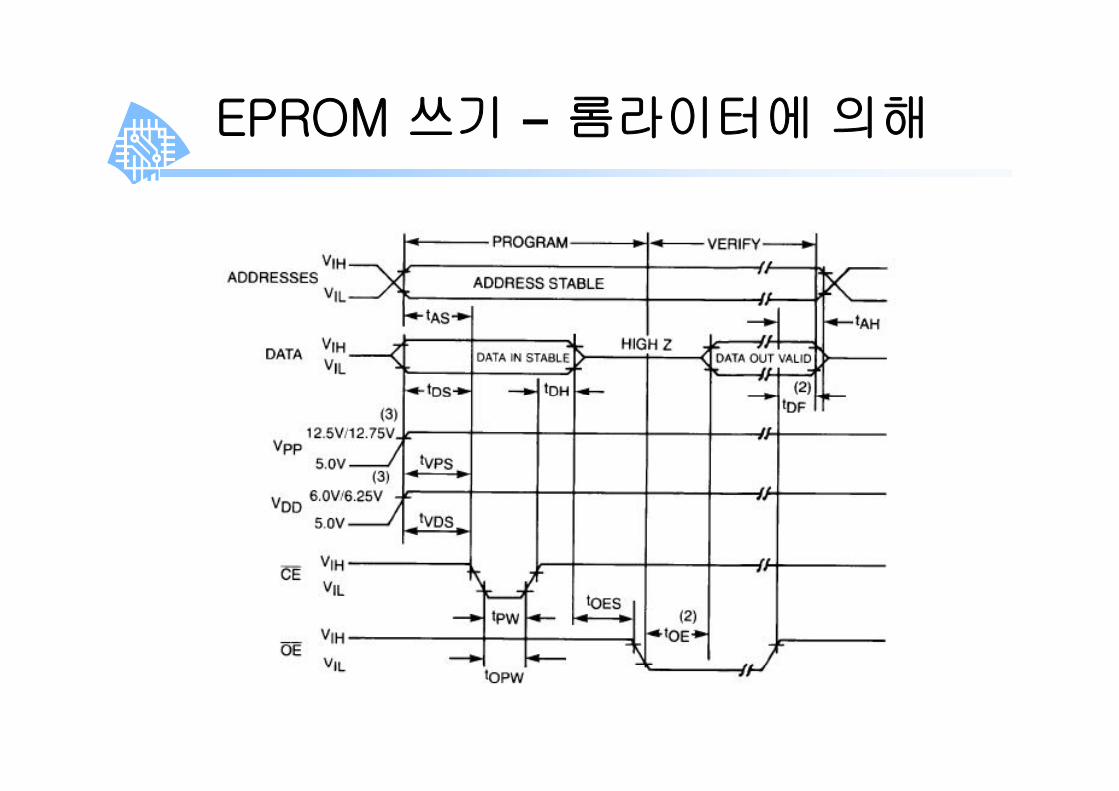
EPROM 쓰기 – 롬라이터에 의해EPROM 쓰기 롬라이터에 의해
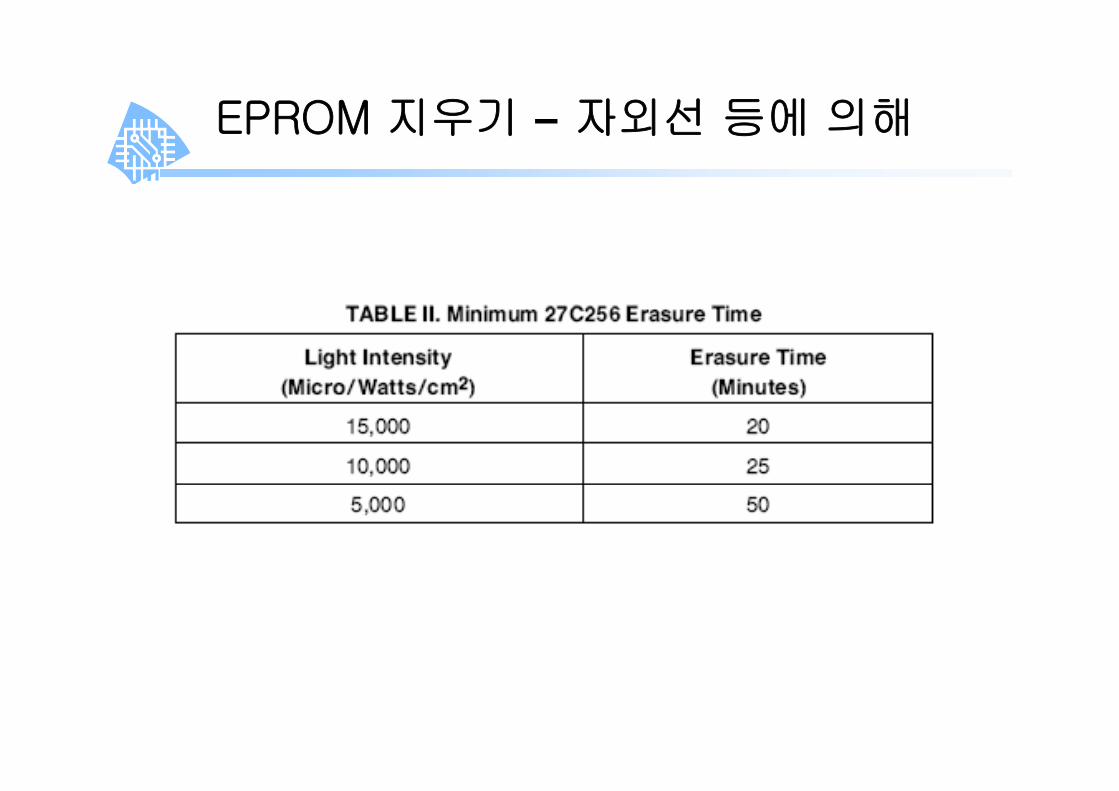
EPROM 지우기 – 자외선 등에 의해EPROM 지우기 자외선 등에 의해

SRAMSRAM
SRAM
읽거나 쓰기가 가능
전원이 공급되면 데이터 유지전원이 공급되면 데이터 유지
전원이 공급되지 않으면 데이터 사라짐
메모리의 구조 – SRAM 신호메모리의 구조 SRAM 신호
A[15:0] Add B : 신호의 라인수는 칩A[15:0] – Address Bus : 신호의 라인수는 칩의 용량과 관계가 있다.D[7:0] Data Bus : 한번에 8비트 단위로 읽D[7:0] – Data Bus : 한번에 8비트 단위로 읽는다.CS : 읽거나 쓰는 시점을 결정한다 Active 에CS 읽거나 쓰는 시점을 결정한다. Active 에서만 데이터를 읽거나 쓴다.WE : CS가 active 시점에서 쓰기를 한다.OE(Output Enable) : 읽을 때 데이터를 출력한다. 이것이 deactive되면 데이터 버스는 끊어진다(하이 임피던스)진다(하이 임피던스).CS, WE, OE의 신호는 0일 때 active 된다.
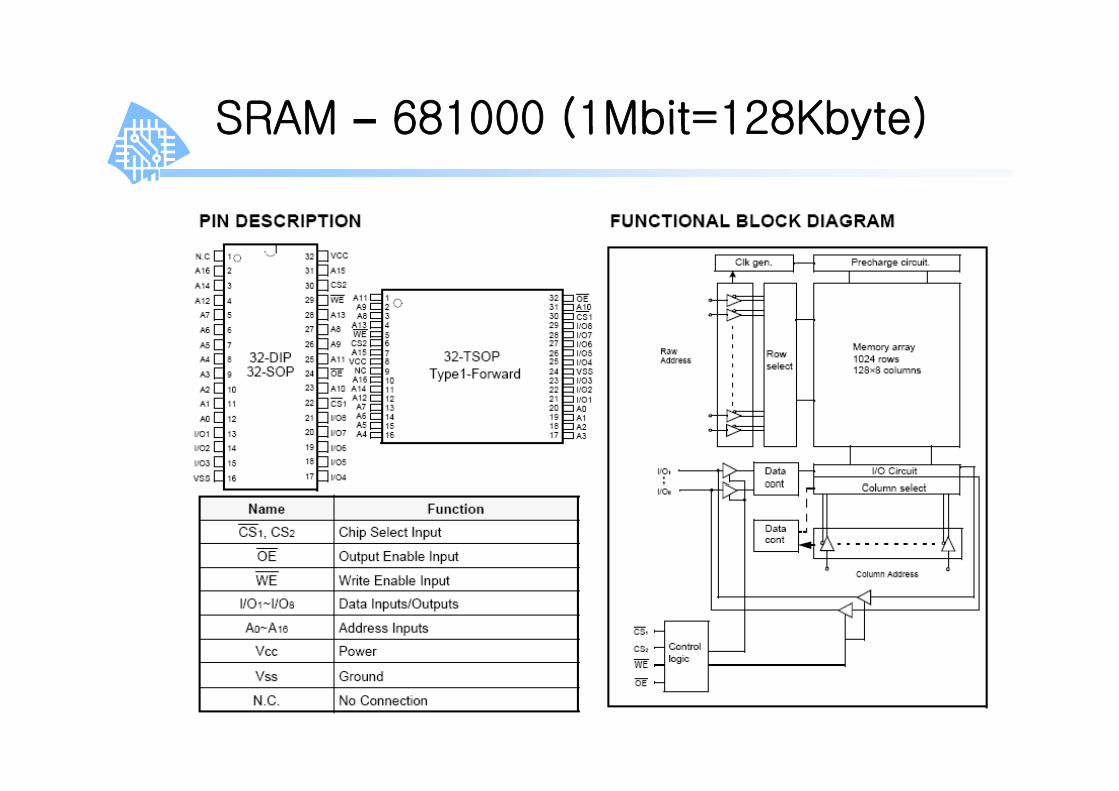
SRAM – 681000 (1Mbit=128Kbyte)SRAM 681000 (1Mbit 128Kbyte)
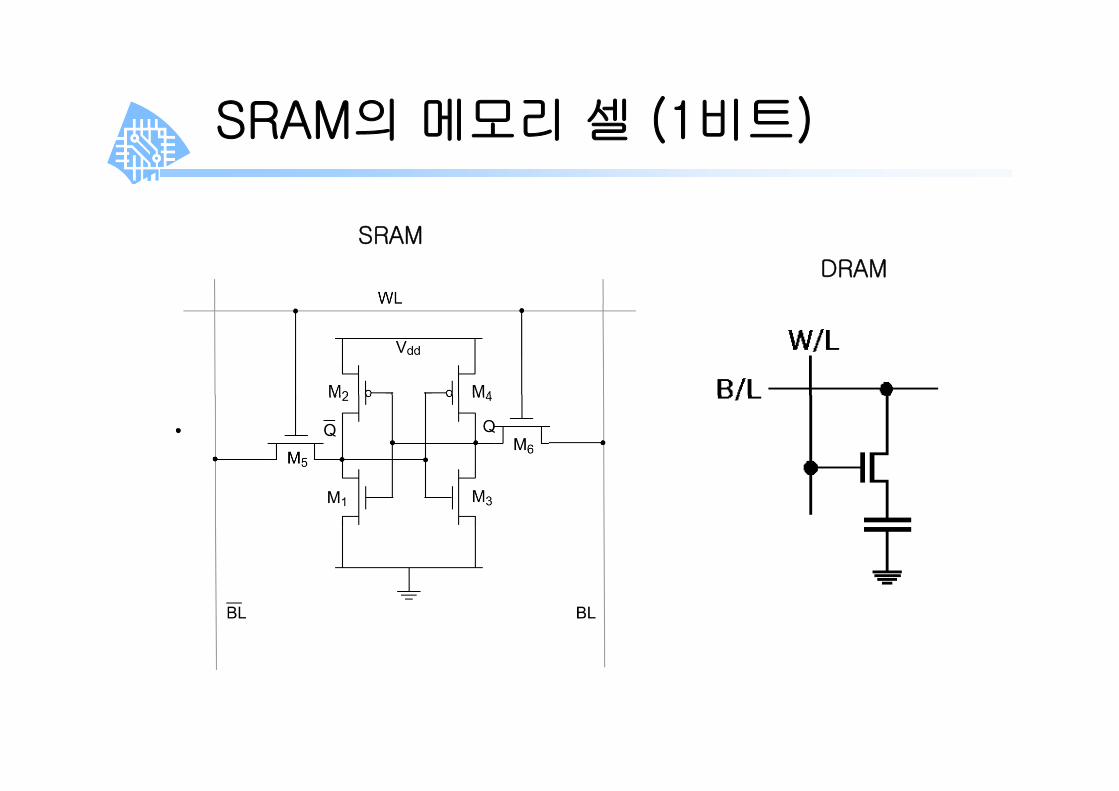
SRAM의 메모리 셀 (1비트)SRAM의 메모리 셀 (1비트)
DRAM
SRAM
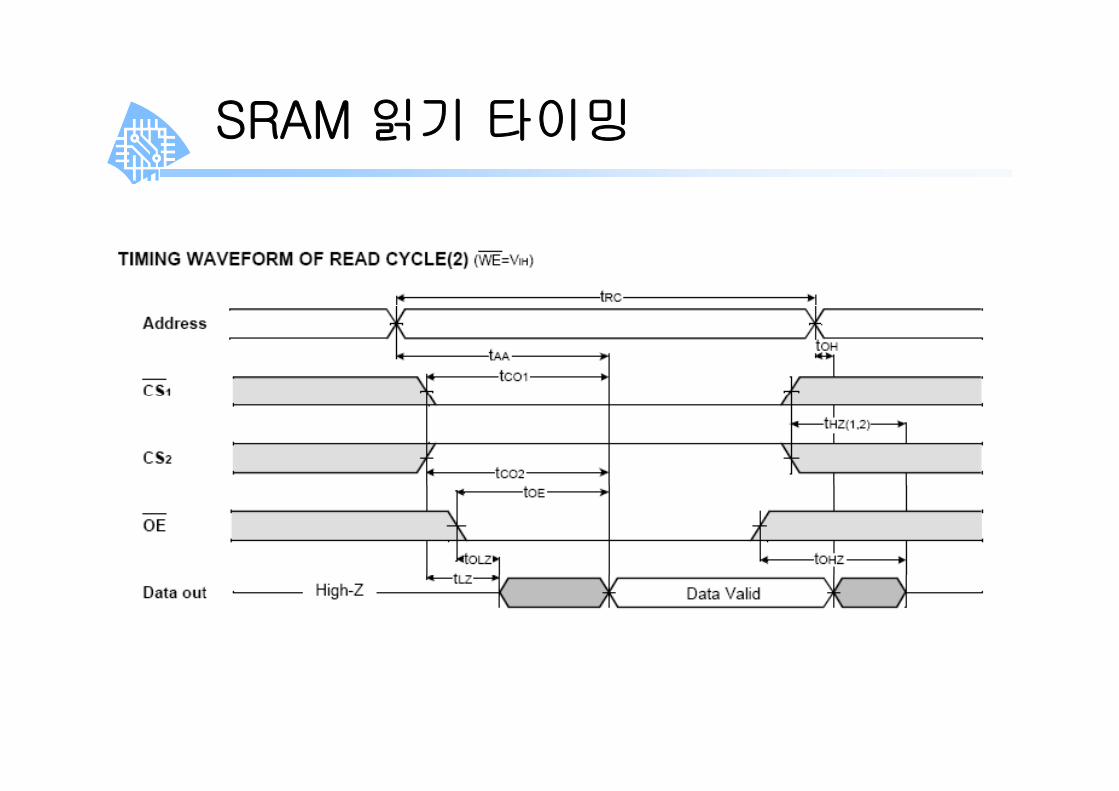
SRAM 읽기 타이밍SRAM 읽기 타이밍

SRAM 읽기와 쓰기 속도SRAM 읽기와 쓰기 속도
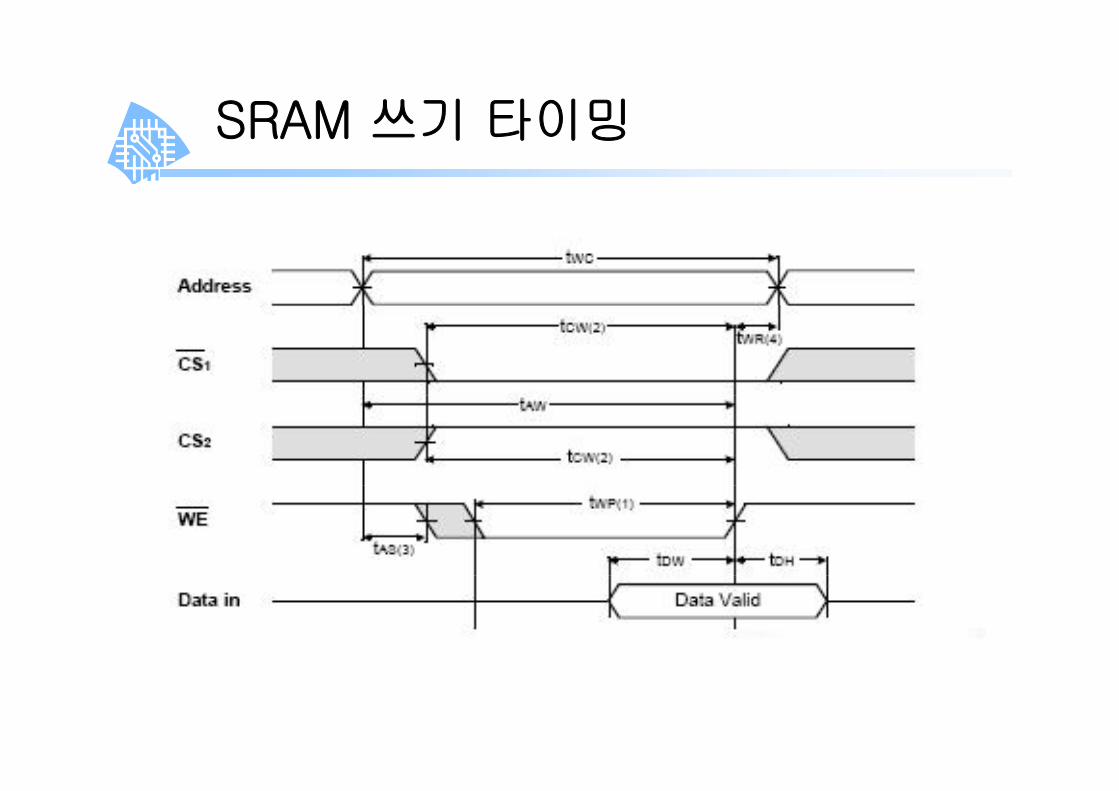
SRAM 쓰기 타이밍SRAM 쓰기 타이밍
DRAMDRAM
DRAM
읽거나 쓰기가 가능
전원이 공급되면 데이터 유지되지만 서서히전원이 공급되면 데이터 유지되지만 서서히데이터가 사라져 주기적으로 리플레쉬 함.
전원이 공급되지 않으면 데이터 사라짐

DRAM의 셀 구조DRAM의 셀 구조
FET와 캐패스터의 전류 손실 때문에주기적 리플레쉬가 필요하고 별도의 하드웨어가 필요하다
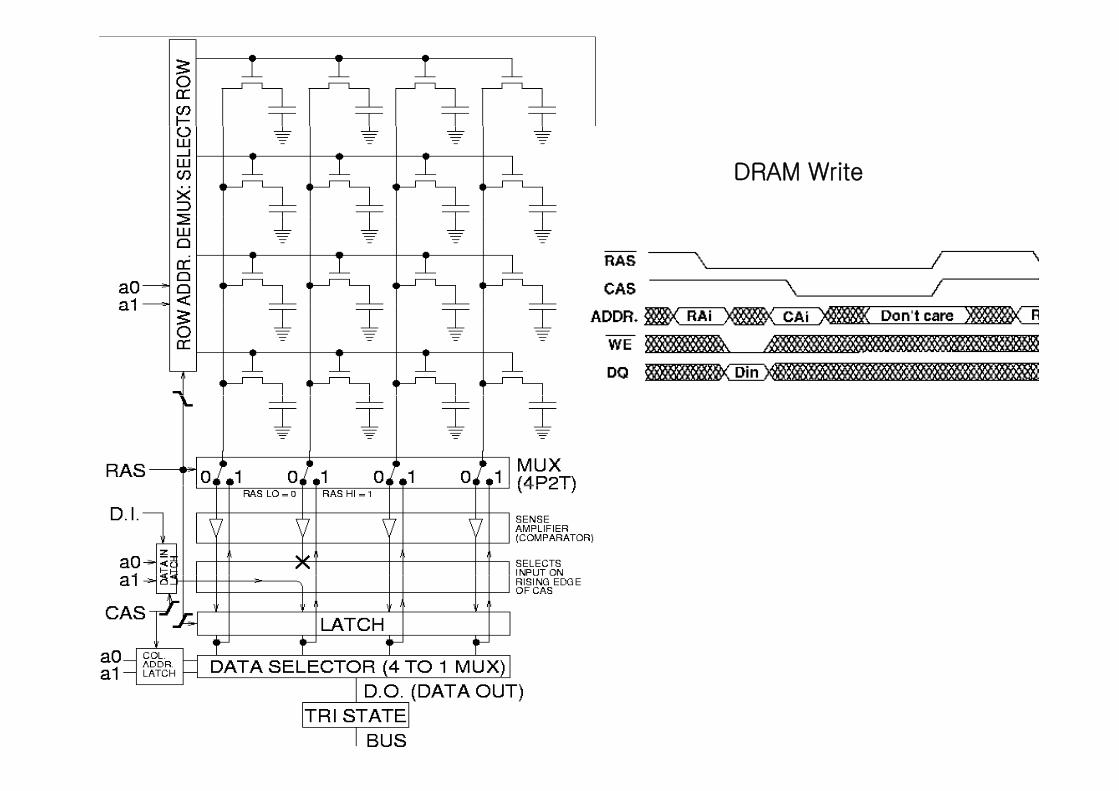
DRAM Write
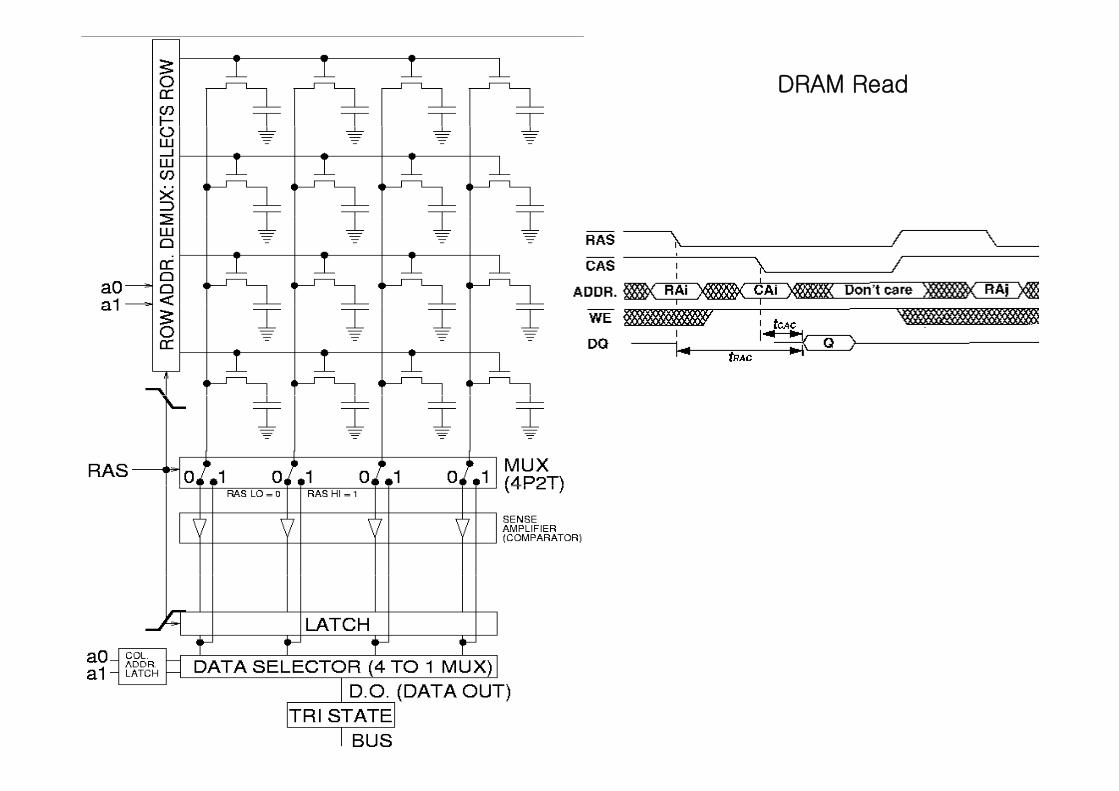
DRAM Read
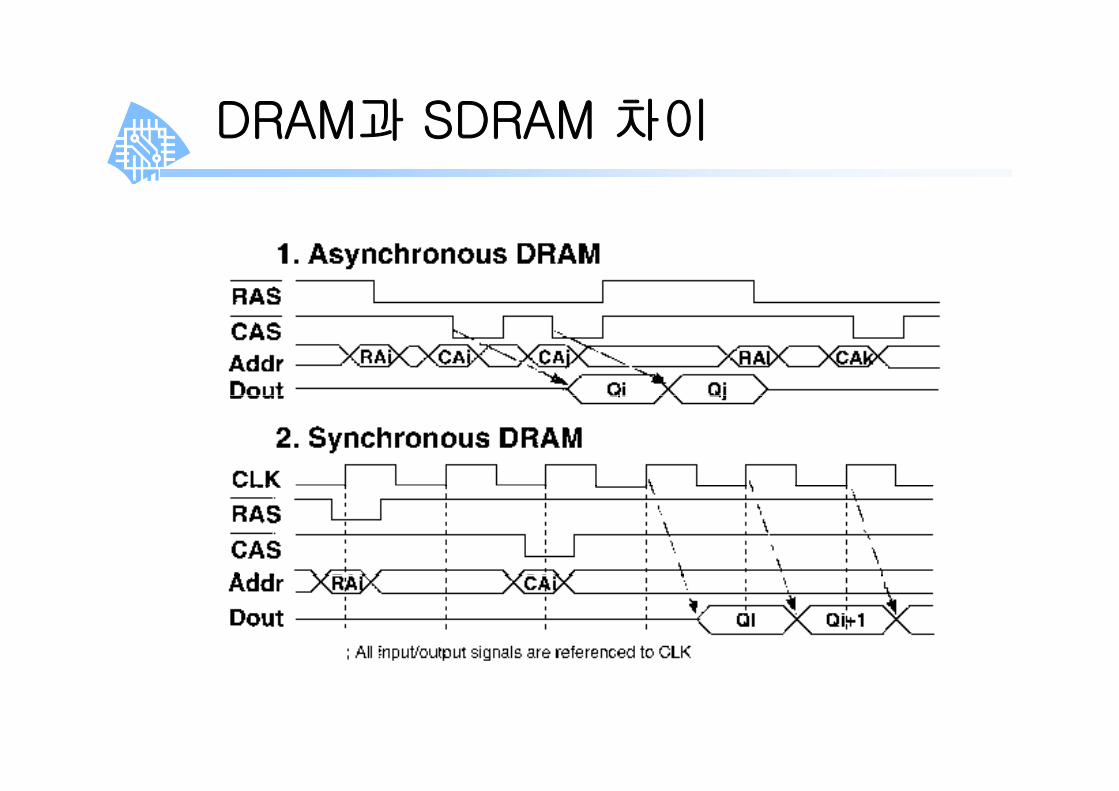
DRAM과 SDRAM 차이DRAM과 SDRAM 차이
메모리의 구현메모리의 구현
CPU와 메모리의 배치CPU와 메모리의 배치
시스템 설계

CPU와 메모리CPU와 메모리
의 메모리 처리 한계CPU의 메모리 처리 한계CPU가 처리할 수 있는 메모리의 한계가 있다.
CPU의 레지스터가 주소 지정을 할 수 있는 공간
8비트 CPU 대부분 16비트 주소를 갖는 64Kbyte 임.
CPU의 메모리 배치 방법프로그램과 변수/데이터 영역이 구분되지 않은경우
대부분의 CPU는 여기에 속함)
프로그램과 변수/데이터영역이 구분8051계열
CPU의 메모리 처리 한계CPU의 메모리 처리 한계
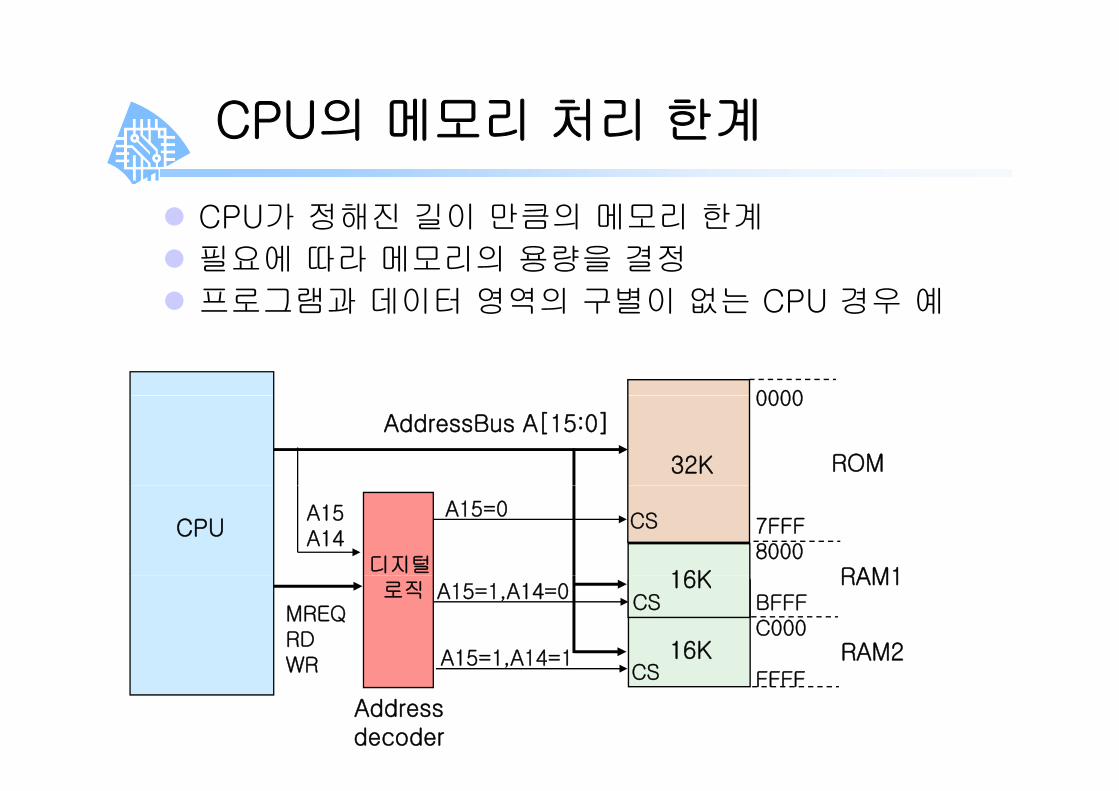
CPU가 정해진 길이 만큼의 메모리 한계CPU가 정해진 길이 만큼의 메모리 한계
필요에 따라 메모리의 용량을 결정
프로그램과 데이터 영역의 구별이 없는 CPU 경우 예프로그램과 데이터 영역의 구별이 없는 CPU 경우 예
0000AddressBus A[15:0]
32K
0000
ROM
16K
7FFF8000
RAM1
A15A14
A15=0CSCPU
디지털16K
16K
BFFFC000
RAM1
RAM2
MREQRDWR
CS
CS
A15=1,A14=0
A15=1,A14=1
로직
FFFFWR CS
A15 1,A14 1
Addressdecoder
메모리 배치 개념메모리 배치 개념
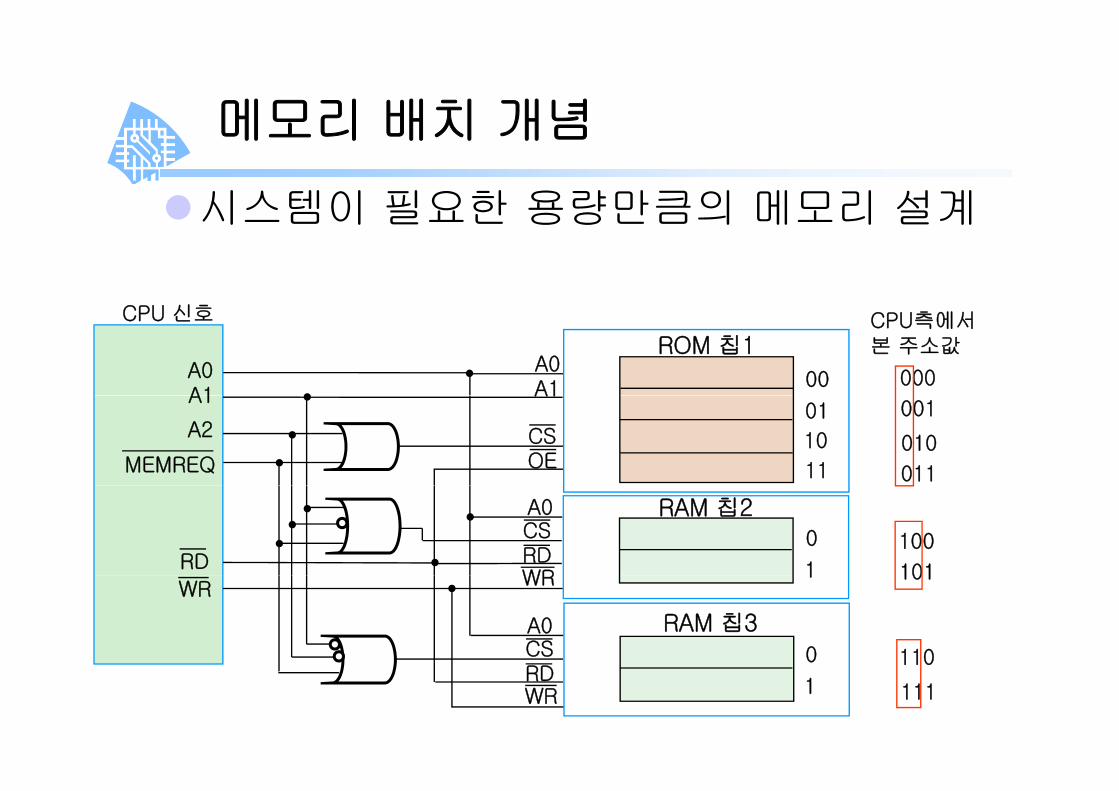
시스템이 필요한 용량만큼의 메모리 설계시스템이 필요한 용량만큼의 메모리 설계
CPU 신호
00 000
CPU측에서본 주소값ROM 칩1
A0A1
A0A1
CPU 신호
01
10
11
001
010
011
CSOE
A1A1
A2
MEMREQ
0
1
100
101
RAM 칩2CSRD
A0
WRRD 1
0
101
110
RAM 칩3
WR
CSA0
WR
1 111RDWR
ROM칩1의 CS 신호 논리ROM칩1의 CS 신호 논리
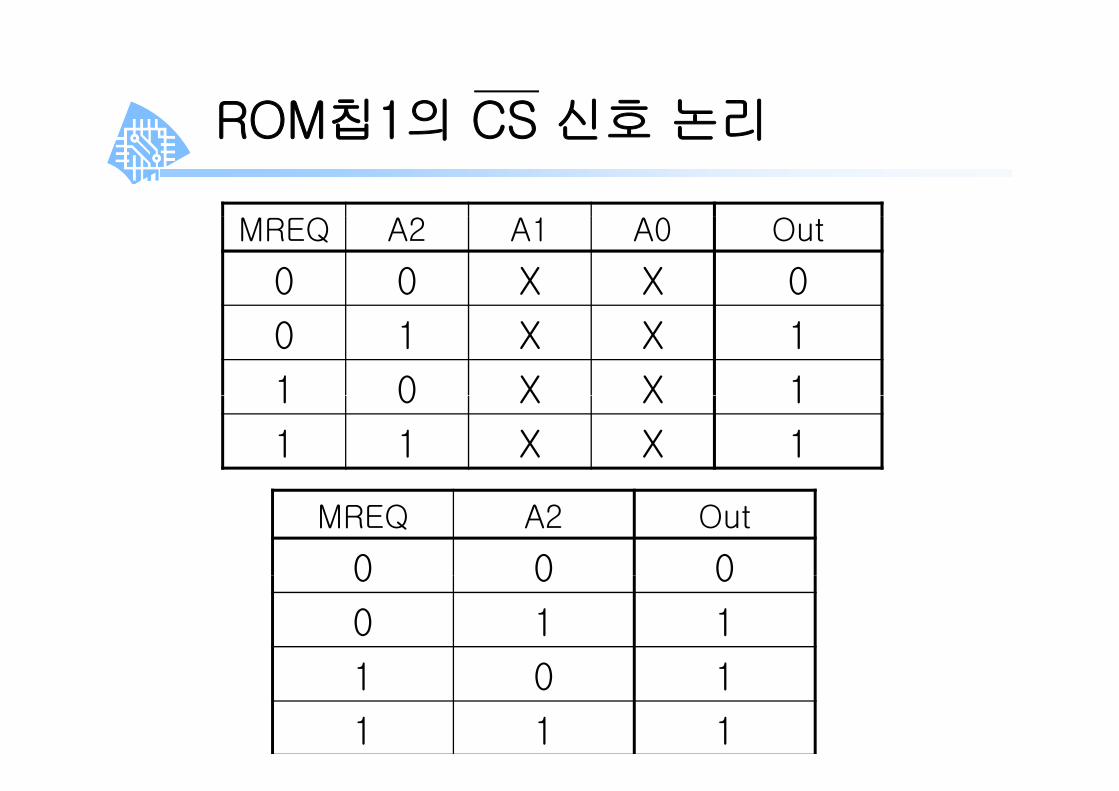
MREQ A2 A1 A0 Out
0 0 X X 0
0 1 X X 1
1 0 X X 11 0 X X 1
1 1 X X 1
MREQ A2 Out
0 0 00 0 0
0 1 1
1 0 11 0 1
1 1 1

RAM칩의 CS 신호 논리RAM칩의 CS 신호 논리
MREQ A2 A1 Out
0 0 0 1논리 식
0 0 0 1
0 0 1 1Out = MREQ A2 A1
= MREQ + A2 + A10 1 0 0
0 1 1 1
1 0 0 1
1 0 1 11 0 1 1
1 1 0 1
1 1 1 1
CPU의 기본 이론CPU의 기본 이론
입출력입출력 장치장치입출력입출력 장치장치
포트 (Port)포트 (Port)
장치에서 시스템 구성 상 상황에 따라 디지털 입출력이 필요지 력이
출력 : 어느 장치를 제어하기 위한 디지털 1비트 출력트 출력
CPU가 한번 쓰기를 하면 이 상태가 다음 쓰기전에는 유지해야 한다.
입력 : 디지털 입력 0,1의 상태를 읽음keypadkeypad
포트는 간단 디지털의 1비트만을 입/출력
주로 8비트 단위로 입출력-CPU마다 다름
디지털 입 출력디지털 입.출력
디지털 출력은 필요한 비트 만을 설계
초기의 CPU는 TTL를 사용 하였다초기의 CPU는 TTL를 사용 하였다.출력 :D-FF/LATCH을 이용
입력 74244등의 버퍼 사용입력 : 74244등의 버퍼 사용
MCU/임베디드는 칩 내부에서 지원메모리가 내부에 존재하므로 밖에 있는 메모
리를 억세스 할 필요가 없다.리를 억세 할 필 가 없다.
칩의 핀을 포트로 사용하도록 진화 하였다.
각 핀을 선택적으로 디지털 입 출력과 특수목각 핀을 선택적으로 디지털 입.출력과 특수목적으로 선택할 수 있다.

디지털 출력디지털 출력
초기의 CPU는 TTL의 D-FF/LATCH을 이용초기의 CPU는 TTL의 D FF/LATCH을 이용
D QD0
74374
CPU
Data Bus D[7:0]
D
CLK
Q
D
CLK
QD1
D2
CPU
Data Bus D[7:0] D
CLK
Q
D Q
D2
D3 출력 8비트
Address
AddrBus
CLK
D
CLK
Q
D Q
D4
D5
AddressDecoderRD/WR
PSENCLK
Q
D
CLK
QD6
D7D
CLK
QD7
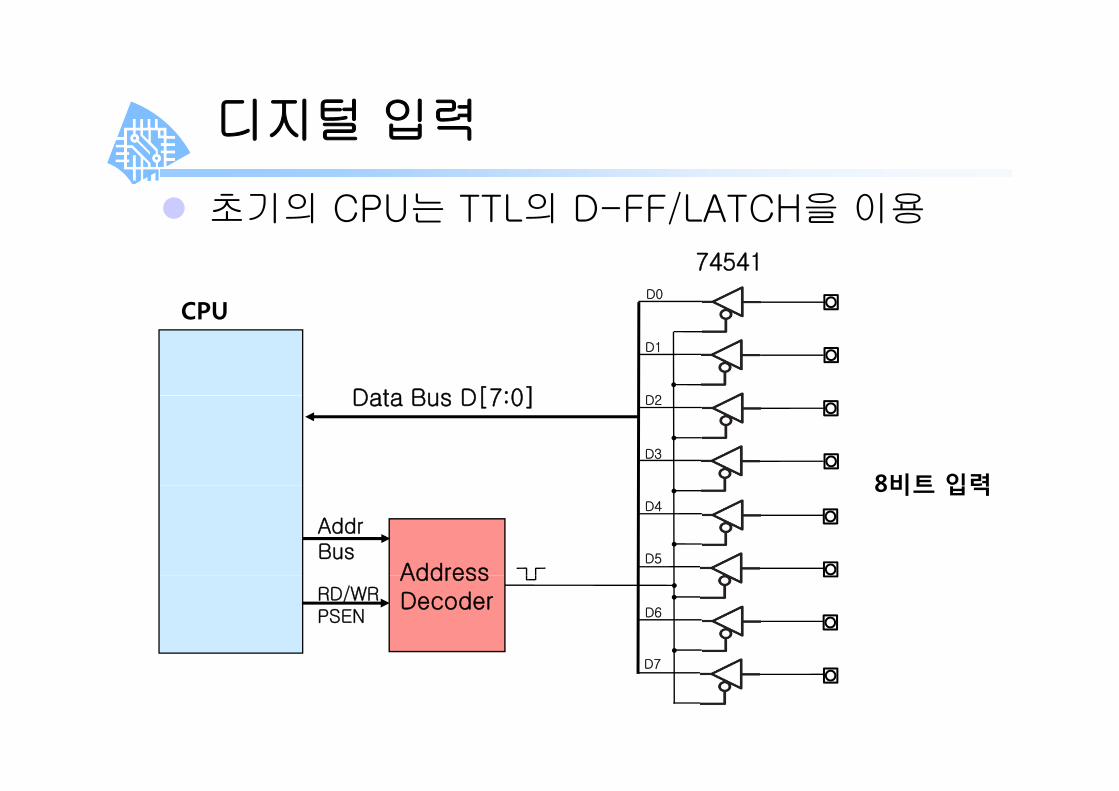
디지털 입력디지털 입력
초기의 CPU는 TTL의 D-FF/LATCH을 이용초기의 CPU는 TTL의 D FF/LATCH을 이용
D0
74541
CPU
Data Bus D[7:0]
D1
D2
CPU
Data Bus D[7:0] D2
D3
8비트 입력
Address
AddrBus
D4
D5
8비트 입력
AddressDecoderRD/WR
PSEN D6
D7D7
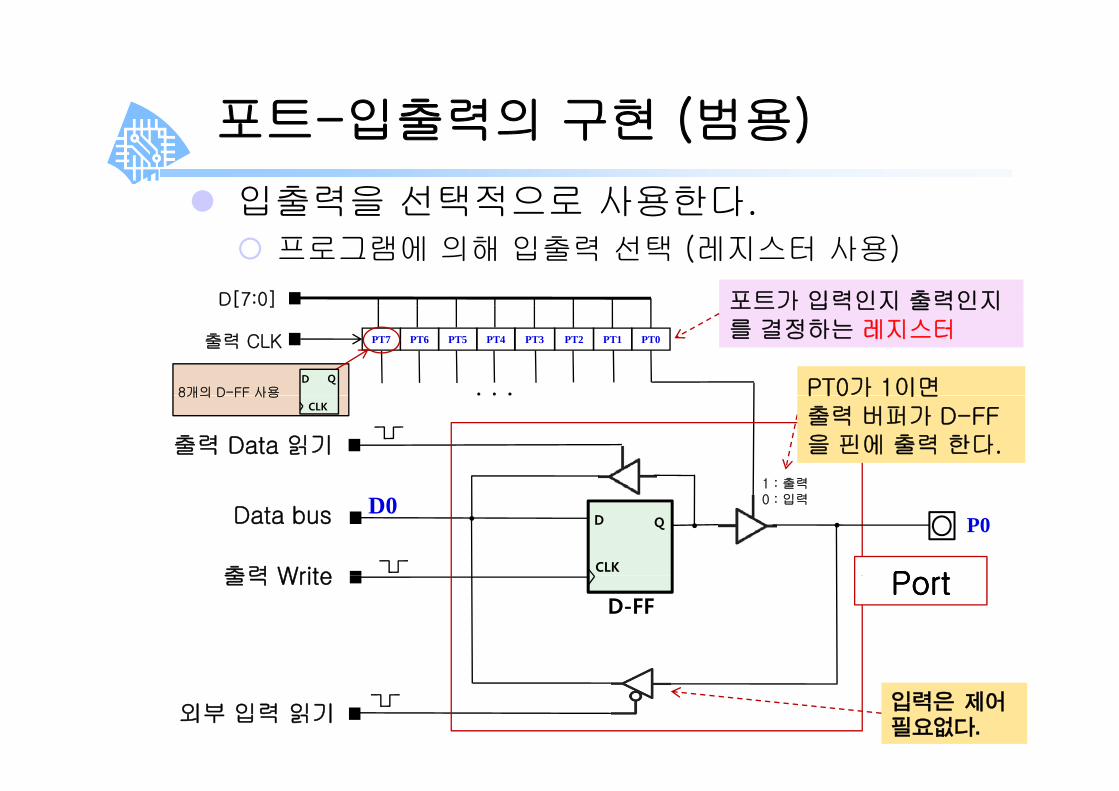
포트-입출력의 구현 (범용)포트 입출력의 구현 (범용)
입출력을 선택적으로 사용한다. 력 택적 사용 다프로그램에 의해 입출력 선택 (레지스터 사용)
D[7:0] 포트가 입력인지 출력인지
출력 CLK PT7 PT6 PT5 PT4 PT3 PT2 PT1 PT0
[7 0]
. . .
포트가 입력인지 출력인지를 결정하는 레지스터
8개의 D-FF 사용D Q
PT0가 1이면
출력 Data 읽기
1 : 출력
8개의 D FF 사용CLK
PT0가 1이면출력 버퍼가 D-FF을 핀에 출력 한다.
D
CLK
QData bus
출력 Write
P0D0
1 : 출력0 : 입력
P tP tD-FF
출력 Write PortPort
외부 입력 읽기입력은 제어필요없다.
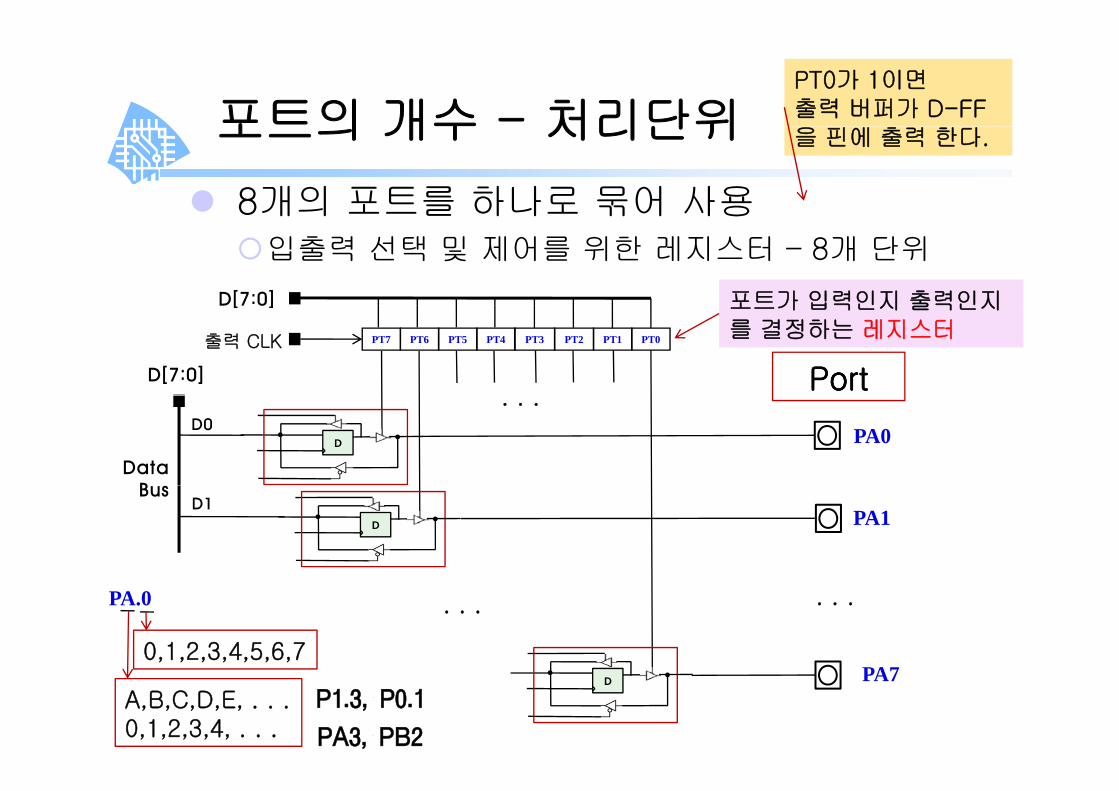
포트의 개수 - 처리단위PT0가 1이면출력 버퍼가 D-FF포트의 개수 처리단위
8개의 포트를 하나로 묶어 사용
을 핀에 출력 한다.
개의 하나 묶어 사용입출력 선택 및 제어를 위한 레지스터 – 8개 단위
D[7:0] 포트가 입력인지 출력인지
출력 CLK PT7 PT6 PT5 PT4 PT3 PT2 PT1 PT0
[ ] 포트가 입력인지 출력인지를 결정하는 레지스터
PortPortD[7:0]
. . .
PA0D
D0
DataB
D PA1D1
Bus
. . . PA.0
0,1,2,3,4,5,6,7
. . .
D PA7A,B,C,D,E, . . .0,1,2,3,4, . . . PA3, PB2
P1.3, P0.1
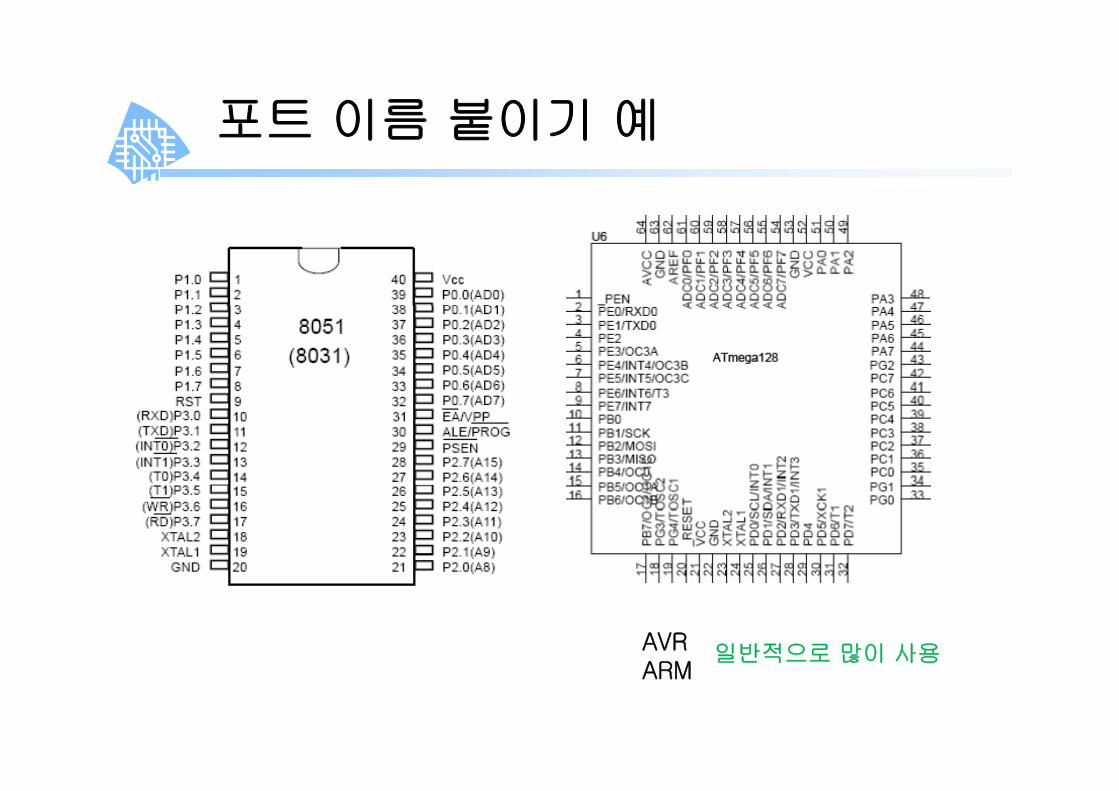
포트 이름 붙이기 예포트 이름 붙이기 예
AVRARM
일반적으로 많이 사용ARM
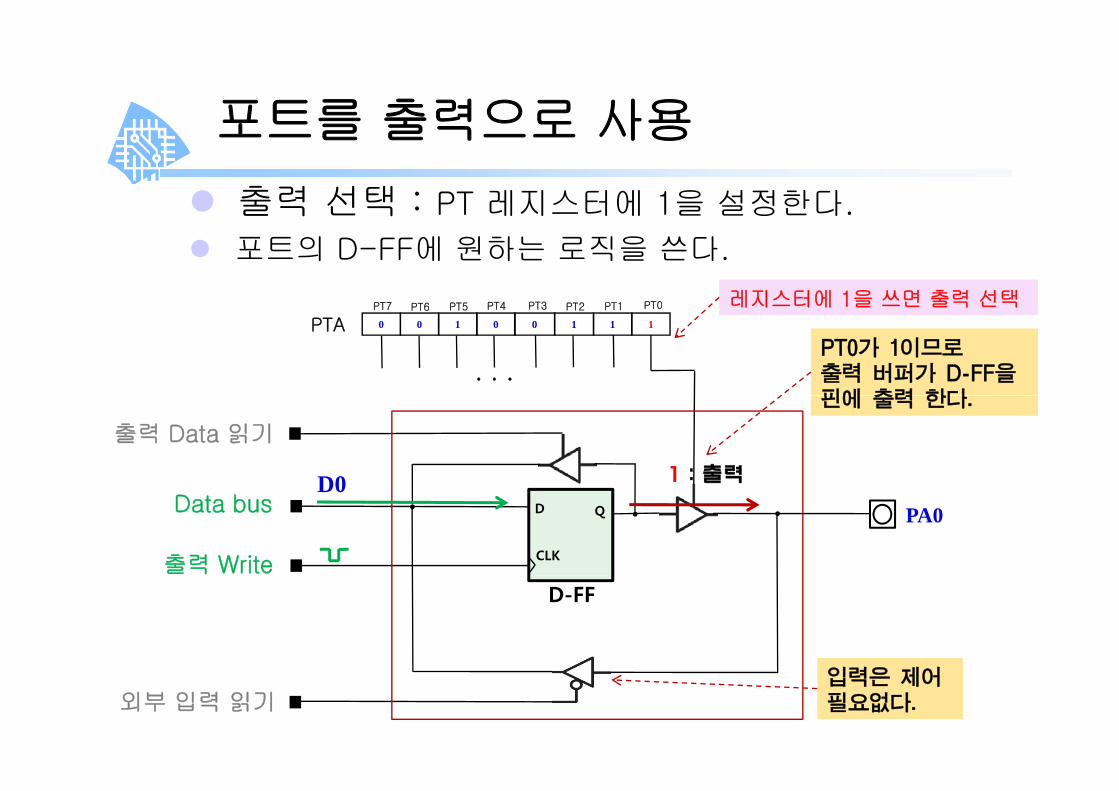
포트를 출력으로 사용포트를 출력으로 사용
출력 선택 : PT 레지스터에 1을 설정한다.력 택포트의 D-FF에 원하는 로직을 쓴다.
레지스터에 1을 쓰면 출력 선택PT0PT1PT2PT3PT4PT5PT6PT7
0 0 1 0 0 1 1 1PTA
. . . PT0가 1이므로출력 버퍼가 D-FF을핀에 출력 한다
레지스터에 1을 쓰면 출력 선택PT0PT1PT2PT3PT4PT5PT6PT7
출력 Data 읽기
D0
핀에 출력 한다.
1 : 출력
D
CLK
QData bus
출력 Write
PA0D0
D-FF
외부 입력 읽기입력은 제어필요없다.

출력한 데이터를 다시 읽기출력한 데이터를 다시 읽기
출력 선택 : PT 레지스터에 1을 설정한다.력 택포트의 D-FF에 원하는 로직을 쓴다.
레지스터에 1을 쓰면 출력 선택PT0PT1PT2PT3PT4PT5PT6PT7
0 0 1 0 0 1 1 1PTA
. . . PT0가 1이므로출력 버퍼가 D-FF을핀에 출력 한다
레지스터에 1을 쓰면 출력 선택PT0PT1PT2PT3PT4PT5PT6PT7
출력 Data 읽기
핀에 출력 한다.
1 : 출력
D
CLK
QData bus
출력 Write
PA0D0
D-FF
외부입력은 제어
외부 입력 읽기
외부입력은 제어필요없다.
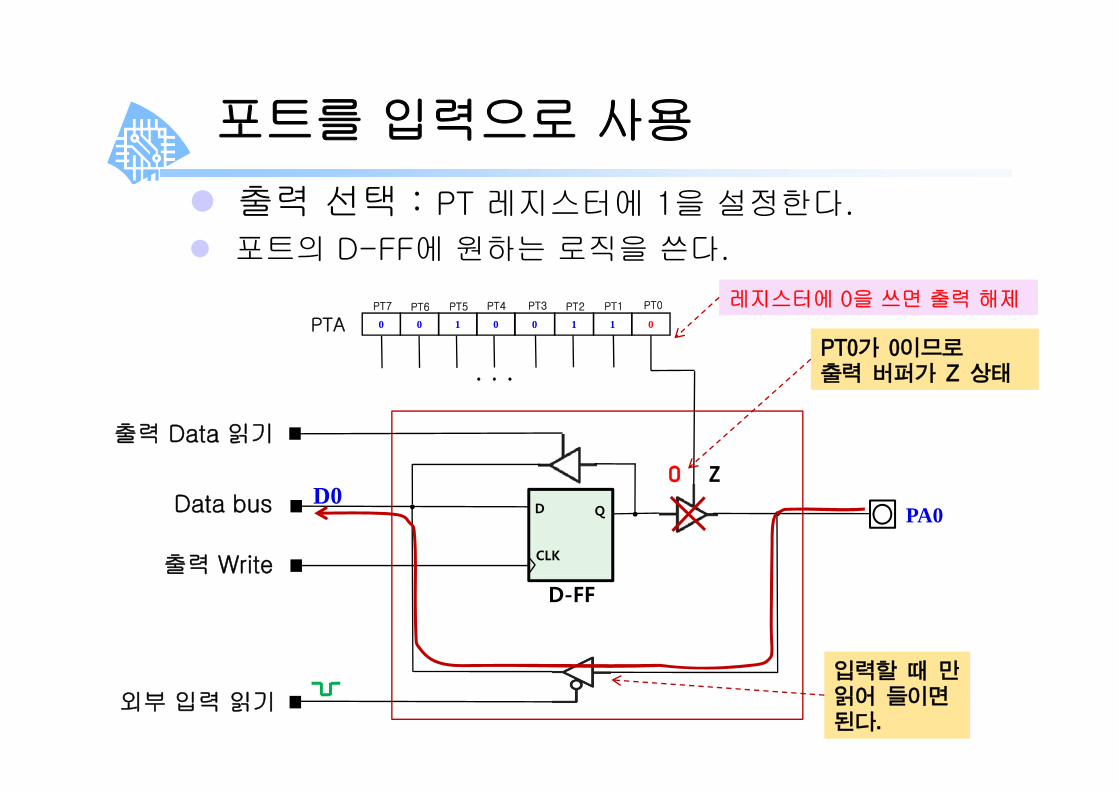
포트를 입력으로 사용포트를 입력으로 사용
출력 선택 : PT 레지스터에 1을 설정한다.력 택포트의 D-FF에 원하는 로직을 쓴다.
레지스터에 0을 쓰면 출력 해제PT0PT1PT2PT3PT4PT5PT6PT7
0 0 1 0 0 1 1 0PTA
. . . PT0가 0이므로출력 버퍼가 Z 상태
레지스터에 0을 쓰면 출력 해제PT0PT1PT2PT3PT4PT5PT6PT7
출력 Data 읽기
0 Z
D
CLK
QData bus
출력 Write
PA0D0
D-FF
입력할 때 만
외부 입력 읽기
입력할 때 만읽어 들이면된다.

포트의 멀티기능 출력포트의 멀티기능 출력
디지털 입출력과 다른 하드웨어 출력 선택적으로 사용레지예 : 디지털 입출력과 UART의 핀으로 사용 UART_ENABLE 레지
스터 비트를 1로 설정하면 UART 쪽의버퍼를 활성화출력버퍼 Shift Register 버퍼를 활성화출력버퍼 Shift Register
X X X X X X X 1
UART 제어레지스터
UTxD_ENABLETxDUART
모듈
P3.1/TxD0 0 1 0 0 1 X 1PT3
UART 제어레지스터
PT3.1
DData bus
출력 Data 읽기
D1 0ZD
CLK
Q
D-FF
Data bus
출력 Write
포트출력은 무시
Z
P3.1
외부 입력 읽기
포트출력은 무시포트 입출력 레지스터는 무시된다.
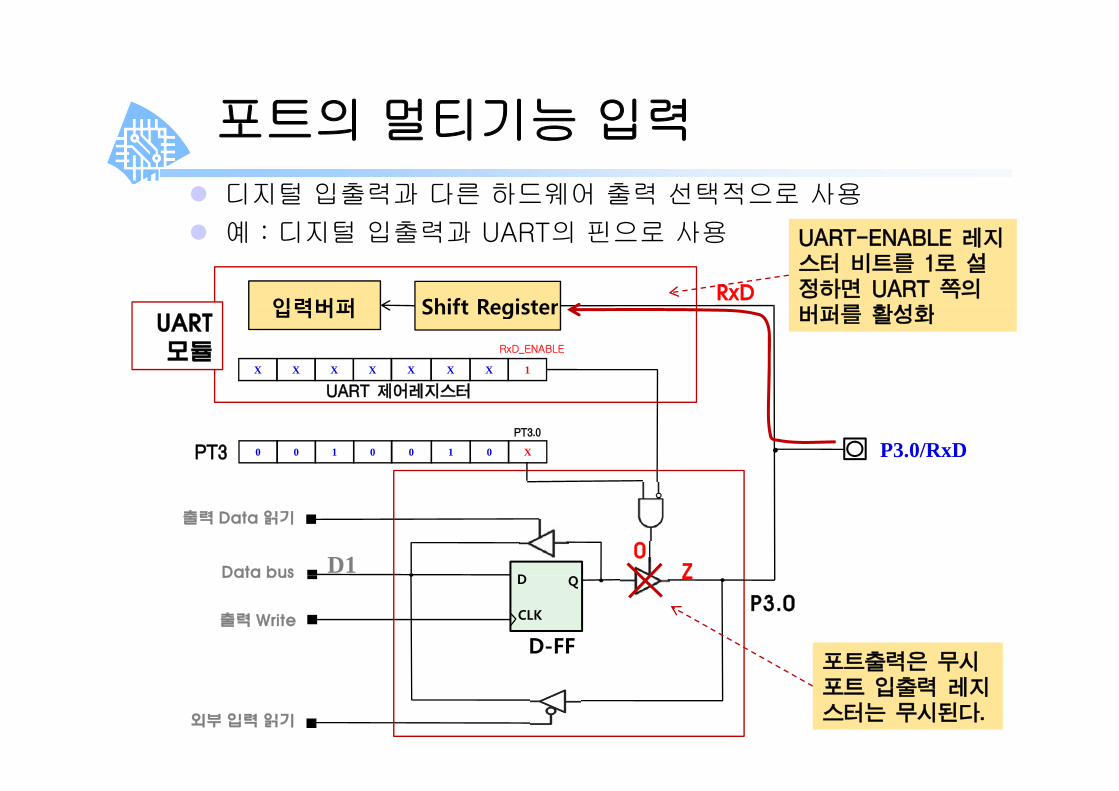
포트의 멀티기능 입력포트의 멀티기능 입력
디지털 입출력과 다른 하드웨어 출력 선택적으로 사용
예 : 디지털 입출력과 UART의 핀으로 사용 UART_ENABLE 레지스터 비트를 1로 설정하면 UART 쪽의버퍼를 활성화입력버퍼 Shift Register
RxD버퍼를 활성화입력버퍼 Shift Register
X X X X X X X 1
UART 제어레지스터
RxD_ENABLE
UART모듈
P3.0/RxD0 0 1 0 0 1 0 XPT3
UART 제어레지스터
PT3.0
DData bus
출력 Data 읽기
D1 0ZD
CLK
Q
D-FF
Data bus
출력 Write
포트출력은 무시
Z
P3.0
외부 입력 읽기
포트출력은 무시포트 입출력 레지스터는 무시된다.
입출력 장치 - 입력입출력 장치 입력
키패드키패드키패드키패드
(keypad)(keypad)(keypad)(keypad)
키패드 (keypad)키패드 (keypad)
키패드는 장치의 특성에 개수는 결정
키의 개수와 CPU의 포트의 수에 따라 회키의 개수와 CPU의 포트의 수에 따라 회로를 결정
개수가 적을 경우 C U 포트 하나에 하나개수가 적을 경우 CPU 포트 하나에 하나의 키로 설계
개수가 많으면 매트릭스 형태로 설계

키의 개수가 적을 경우키의 개수가 적을 경우
CPU의 포트에 직접 연결 한다CPU의 포트에 직접 연결 한다.
5V CPU5V
전류1R 저항
CPU
4.7K 10K
P0 14.xV
P0.1
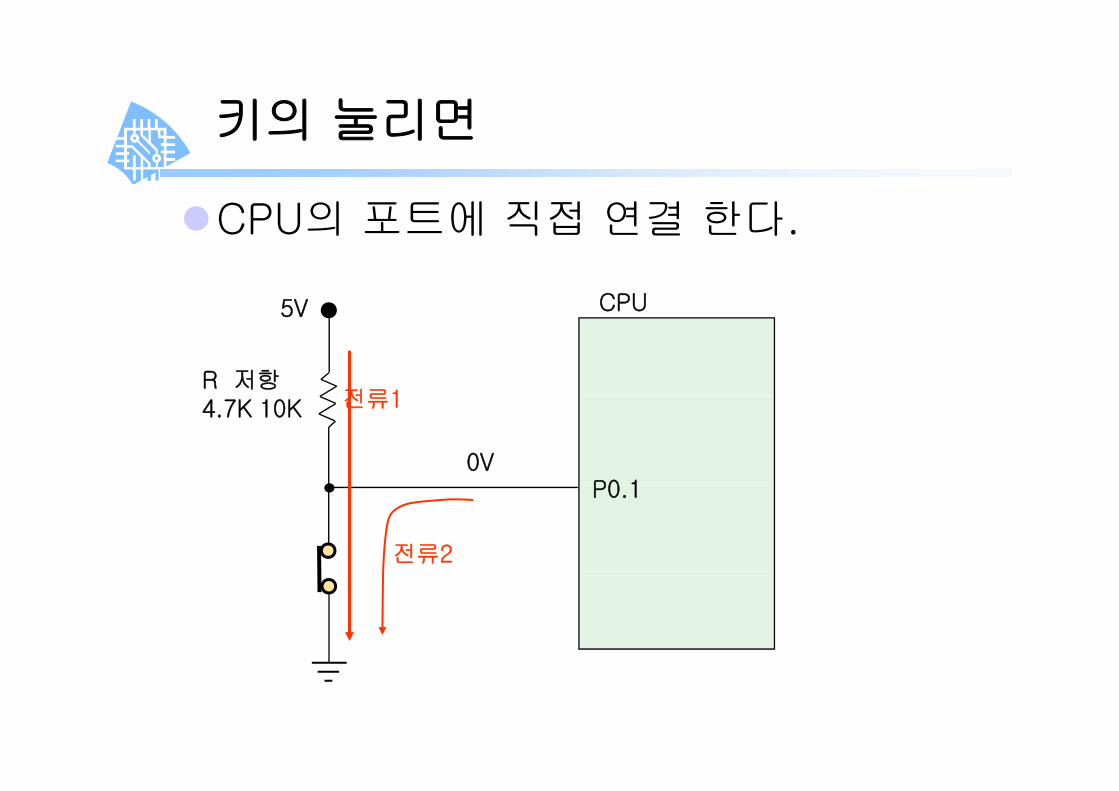
키의 눌리면키의 눌리면
CPU의 포트에 직접 연결 한다CPU의 포트에 직접 연결 한다.
5V CPU5V
R 저항
CPU
전류14.7K 10K
P0 1
전류1
0V
전류2
P0.1
소프트에서 처리소프트에서 처리
키가 눌리면 논리 1 -> 0로 바뀜
만약 포트의 인터럽트가 가능하면 인터럽만약 포트의 인터럽트가 가능하면 인터럽드 사용
인터럽트가 발생하면 키를 읽어 확인인터럽트가 발생하면 키를 읽어 확인
키에 맞는 기능 수행
인터럽트 불가능하면 계속 키가 눌렸는지확인확인
키가 눌리면 이에 맞는 동작 실행

키가 많을 때 (4x4=16키)11 22 33
44 55 66키가 많을 때 (4x4 16키)
VDD
77 88 99
** 00 ##VDD
R
◀◀ ▶▶ RR
Run/StopRun/StopR출력 회로
Run/StopRun/Stop
CPU 포트 출력
CPU 포트 입력TTL(74244)
CPU 포트 출력TTL D-FF
매트릭스 키의 신호처리매트릭스 키의 신호처리
키가 눌리면 인터럽트 신호 발생하는 경우어느 키 인지를 감지하는 프로그램 실행어느 키 인지를 감지하는 프로그램 실행
키에 맞는 동작 실행
인터럽트가 불가능 하면 키 눌렸는지 확인어느 키 인지를 확인하고 동작 실행
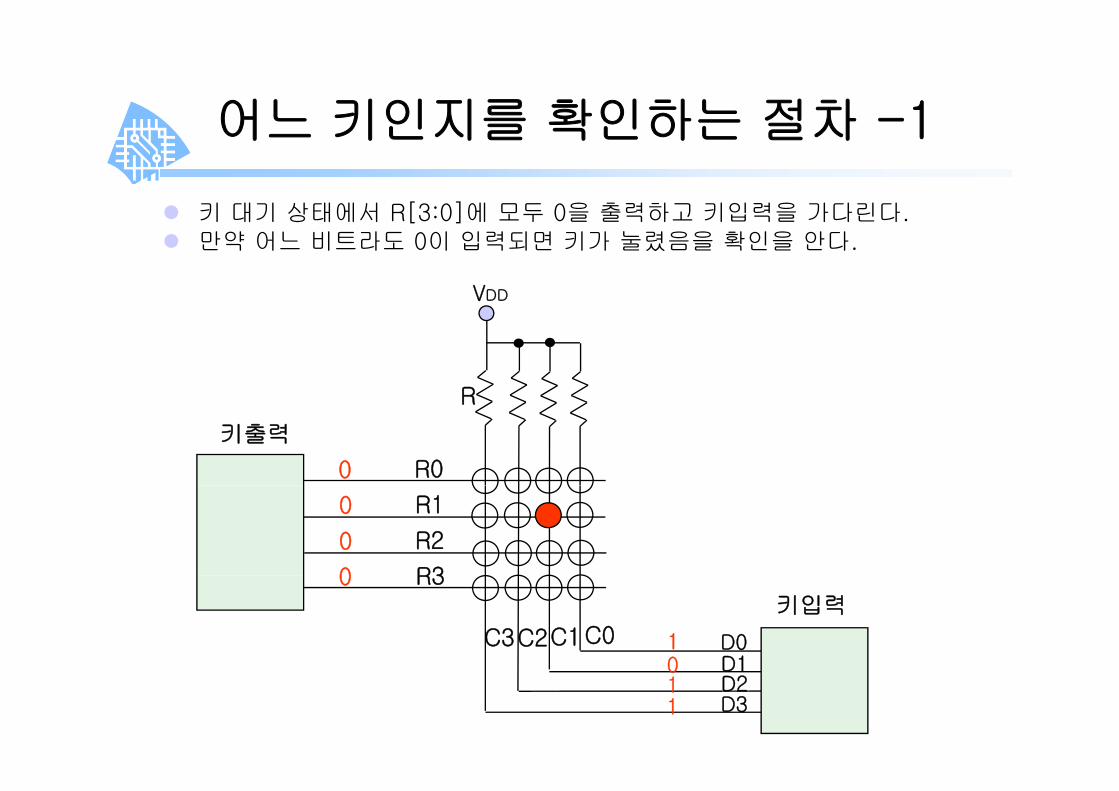
어느 키인지를 확인하는 절차 -1어느 키인지를 확인하는 절차 1
키 대기 상태에서 R[3:0]에 모두 0을 출력하고 키입력을 가다린다키 대기 상태에서 R[3:0]에 모두 0을 출력하고 키입력을 가다린다.만약 어느 비트라도 0이 입력되면 키가 눌렸음을 확인을 안다.
VDD
RR
키출력
R00
R1
R2
R3
0
0
0 R3
C0C1C2C3 D0D1
0
10
키입력
D1D2D3
011

키 확인 절차 - 2키 확인 절차 2
우선 R0에 을 나머지는 0을 나머지는 1을 출력하고 키입력 값을 읽는다우선 R0에 을 나머지는 0을 나머지는 1을 출력하고 키입력 값을 읽는다.입력된 키 값이 모두 1이므로 R0 줄의 모든 키는 입력이 되지 않았음.
VDD
RR
키출력
R00
R1
R2
R3
1
1
1 R3
C0C1C2C3 D0D1
1
11
키입력
D1D2D3
111
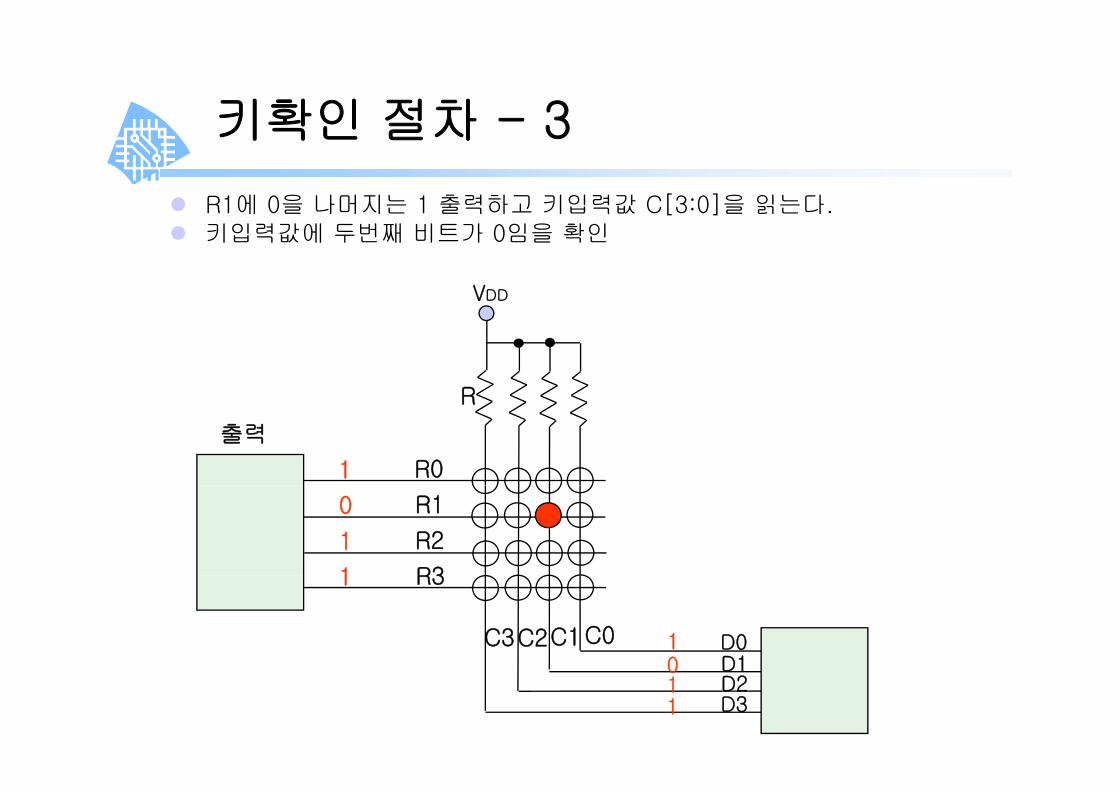
키확인 절차 - 3키확인 절차 3
R1에 0을 나머지는 1 출력하고 키입력값 C[3:0]을 읽는다.
VDD
키입력값에 두번째 비트가 0임을 확인
RR
출력
R01
R1
R2
R3
0
1
1 R3
C0C1C2C3 D0D1
1
10 D1
D2D3
011

키확인 절차 - 4키확인 절차 4
R1에 0을 나머지는 1 출력하고 키입력을 한다.
VDD
키입력을 하면 두번째 비트가 0임을 확인
RR
출력
R01
R1
R2
R3
1
0
1 R3
C0C1C2C3 D0D1
1
11 D1
D2D3
111
키을 읽을 때의 문제점키을 읽을 때의 문제점
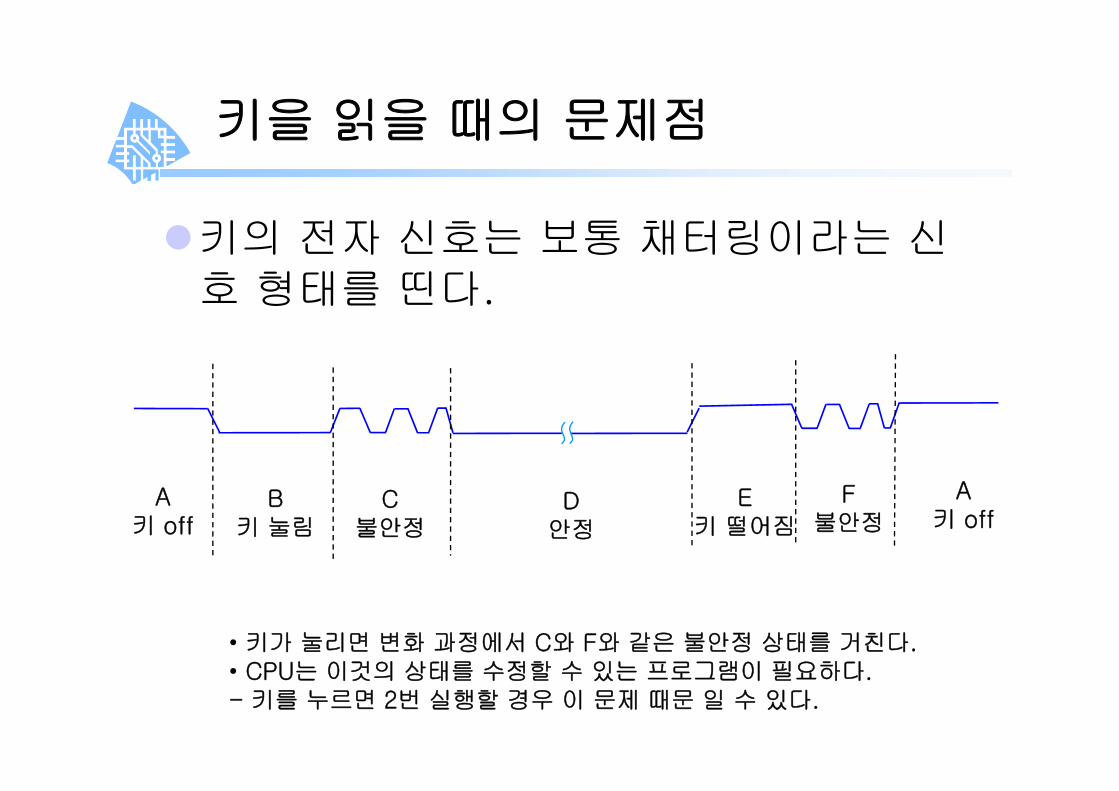
키의 전자 신호는 보통 채터링이라는 신호 형태를 띤다.형태 다
F AA키 off
B키 눌림
C불안정
D안정
E키 떨어짐
F불안정
A키 off
• 키가 눌리면 변화 과정에서 C와 F와 같은 불안정 상태를 거친다.CPU는 이것의 상태를 수정할 수 있는 프로그램이 필요하다• CPU는 이것의 상태를 수정할 수 있는 프로그램이 필요하다.
- 키를 누르면 2번 실행할 경우 이 문제 때문 일 수 있다.
CPU의 기본 이론CPU의 기본 이론
입출력입출력 장치장치입출력입출력 장치장치
• LCDLCD
LCDLCD
문자형 LCD정해진 문자를 쓸수 있다. (ASCII)정해진 문자를 쓸수 있다. (ASCII)
간단한 구조 – CPU와의 인터페이스가 간단.
그래픽형 LCD그래픽형 LCDSTN-LCD : 흑백으로 적은 사이즈의 LCD
TFT-LCD : 휴대장치나 기타그래픽 처리 때문에 LCD 드라이버가 복잡
그래픽 메모리가 필요
메모리로 부터 고속 전송 필요
임베디드에서는 내부의 DMA등으로 그래픽 데이터전송

문자 LCD 모듈 내부 블록도문자 LCD 모듈 내부 블록도
ControllerPower Supply
DC/DC converter
Driver
DC/DC converter
Memory
Common
Driver
CPUCG
RAM
CG
ROM
LCDMemory
DD
RAM
Segment
DriverCGRAM CGROM
LCD C t ll & D i IC
RAM ROMRAMDriver
LCD Controller & Driver IC
LCD화면과 User가 원하는 LCD 화면에LCD화면과1:1로 대응하는
ASCII 코드
User가 원하는FONT를 만들어서
저장하는 RAM
LCD 화면에Display될 글자
데이터(font)를 저장

LCD 내부 Register와 신호 흐름LCD 내부 Register와 신호 흐름
I t ti i tRS=0
입
출
RS
R/W
E
Instruction register
D7 D6 D5 D4 D3 D2 D1 D0LCD
RS 0
8
출
력
버CG CG
E
D[7:0]
DD
8 AC6AC5AC4AC3AC2AC1AC0
Data register
D7 D6 D5 D4 D3 D2 D1 D0
버
퍼CG
RAM
CG
ROM+5V
Vo
DD
RAM
RS=1
8
GND8
제어 레지스터제어 레지스터
DR(Data Register)DR(Data Register)
DD RAM/CG RAM에 쓰거나 읽어낸 데이터를 일시적으로 저장터를 일시적으로 저장
IR(Instruction Register) : Write Only
Display Clear, Cursor Shift등의 명령과DD RAM및 CG RAM의 Address 저장
BF(Busy Flag)
RS=0, R/W=1, BFRS 0, R/W 1, BF
1 : 내부 설정중, 다음 명령을 대기
0 : 명령을 받을 수 있음0 : 명령을 받을 수 있음.
LCD에 명령을 줄때마다 BF 확인 필요
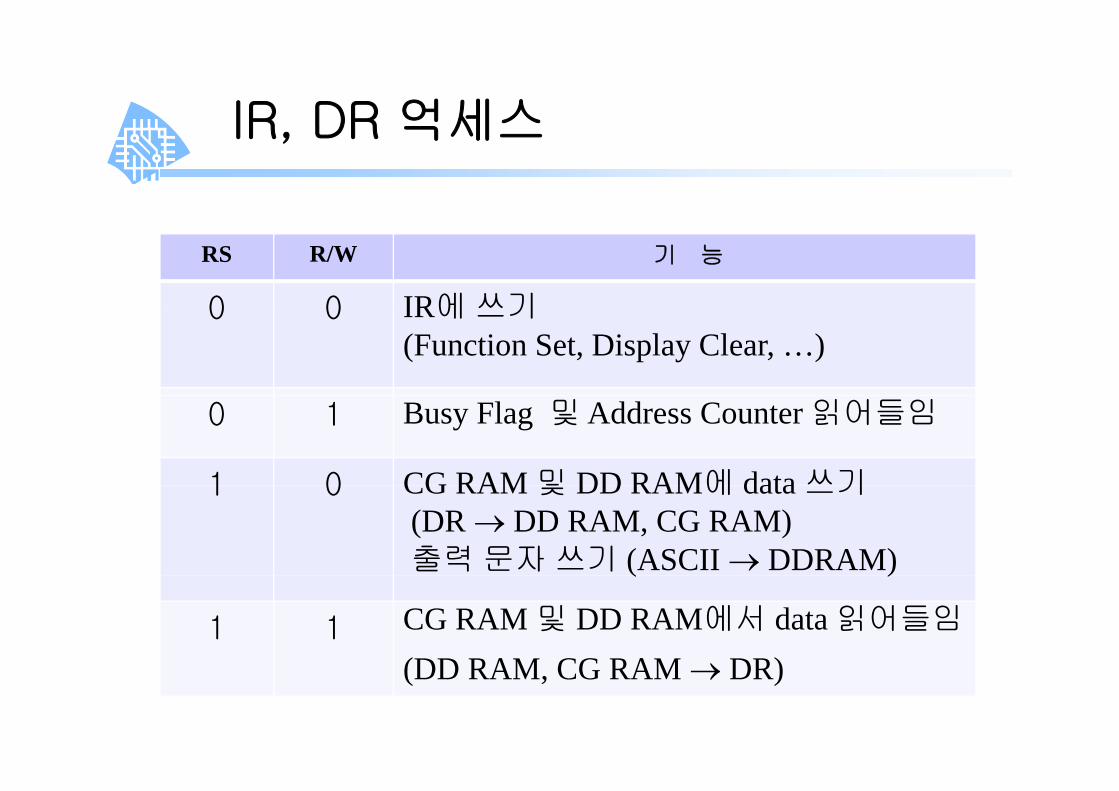
IR DR 억세스IR, DR 억세스
RS R/W 기 능
0 0 IR에쓰기0 0 IR에쓰기(Function Set, Display Clear, …)
0 1 Busy Flag 및Address Counter읽어들임
1 0 CG RAM및 DD RAM에 data쓰기1 0 CG RAM 및 DD RAM에 data 쓰기(DR → DD RAM, CG RAM)출력문자쓰기 (ASCII → DDRAM)( )
1 1 CG RAM 및 DD RAM에서 data 읽어들임(DD RAM CG RAM → DR)(DD RAM, CG RAM → DR)
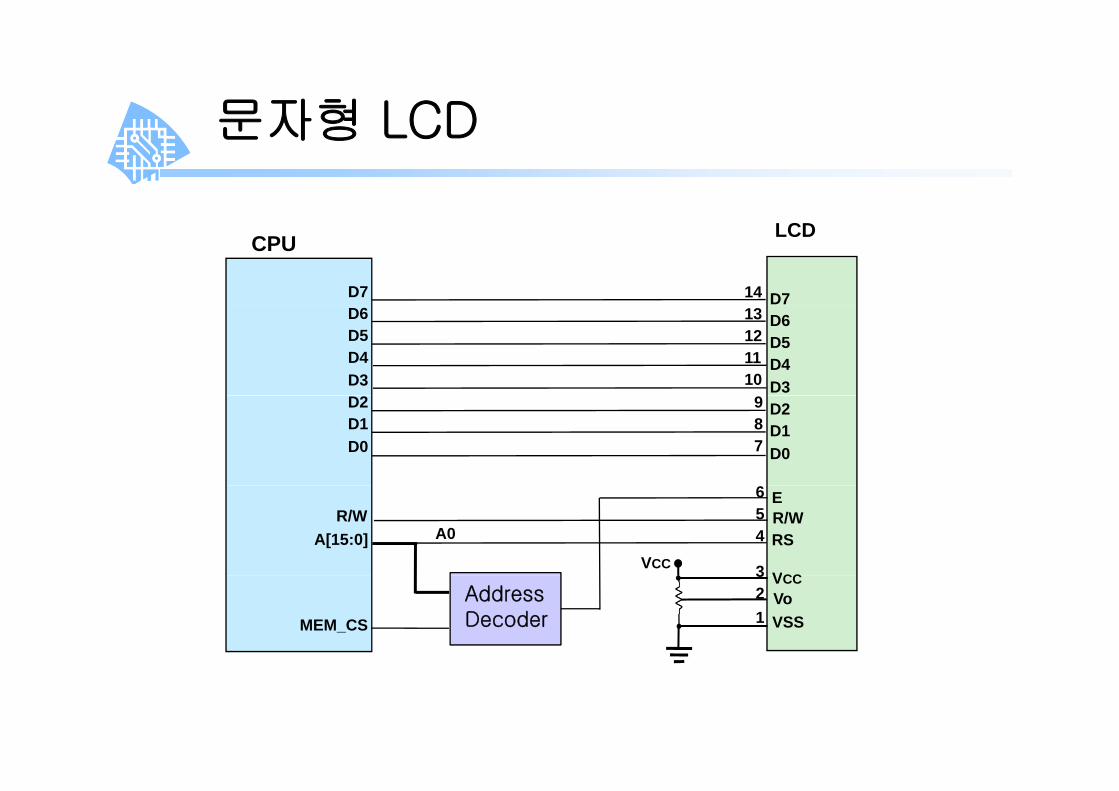
문자형 LCD문자형 LCD
LCD
14D7 D7
CPU
10111213
D4
D6
D3
D5
D4
D6
D3
D5
789D2
D0D1
D2
D0D1
3
456
R/WA0A[15:0]
VCCVCC
ER/WRS
123
AddressDecoderMEM_CS
VCC
VSSVo
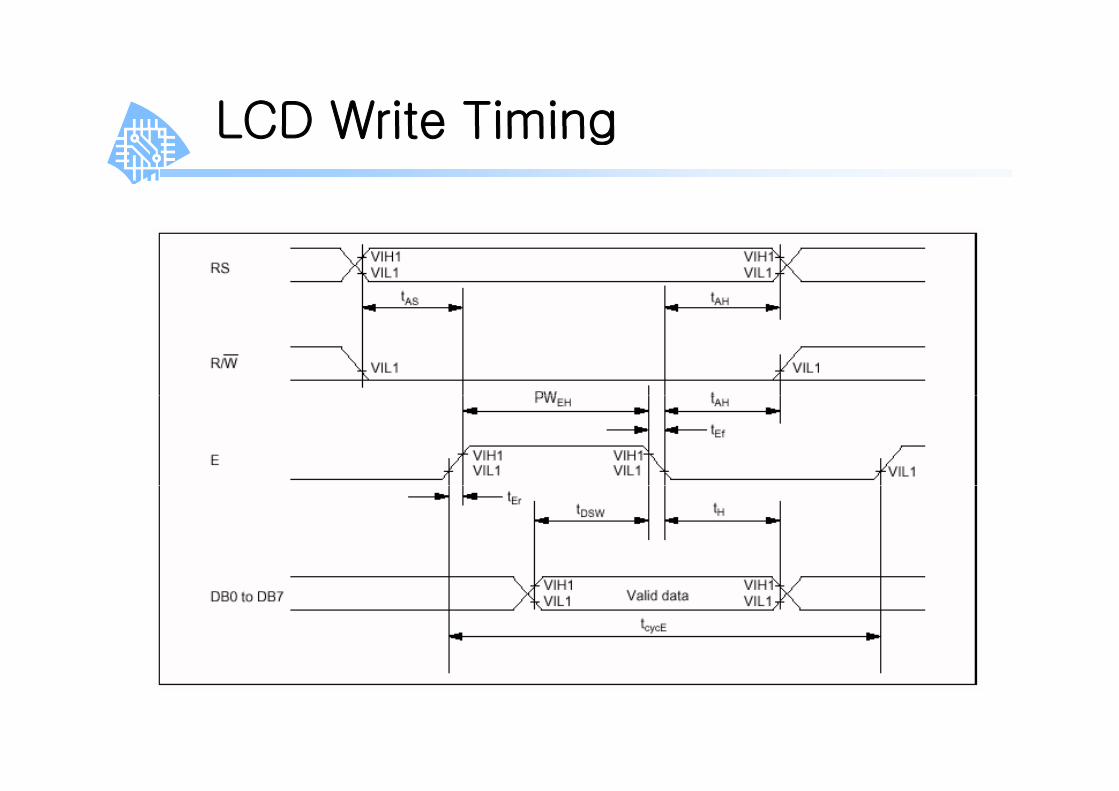
LCD Write TimingLCD Write Timing
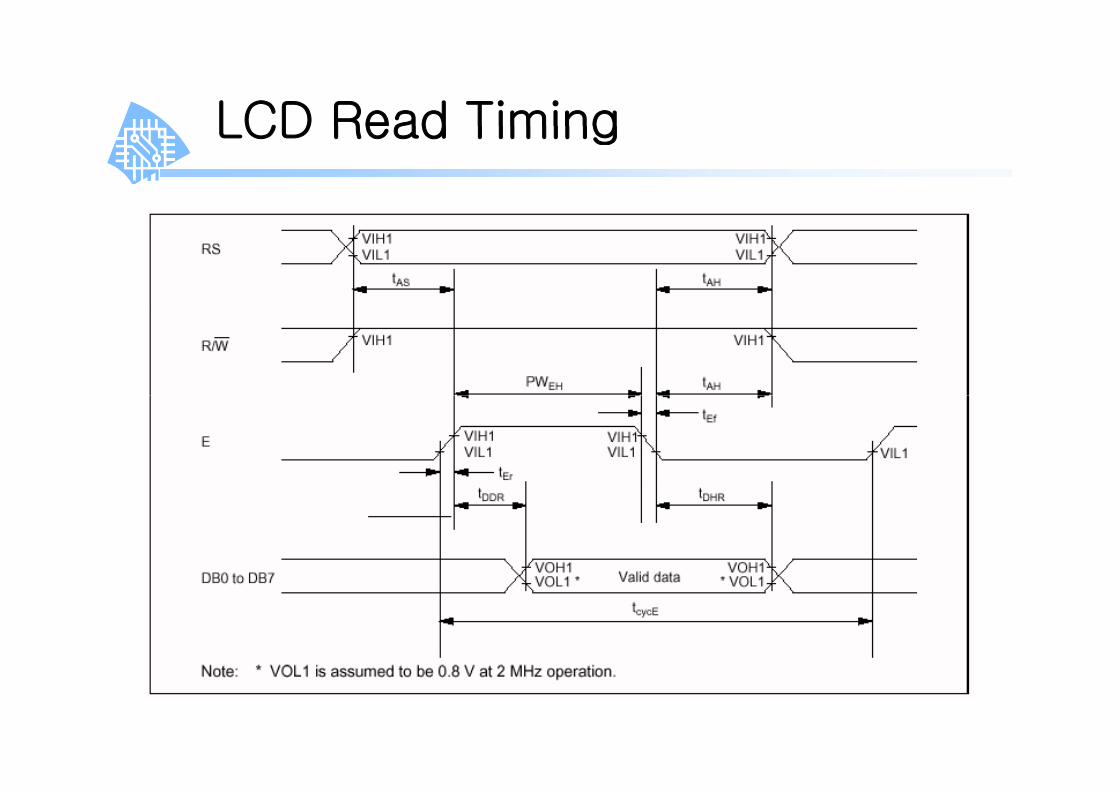
LCD Read TimingLCD Read Timing
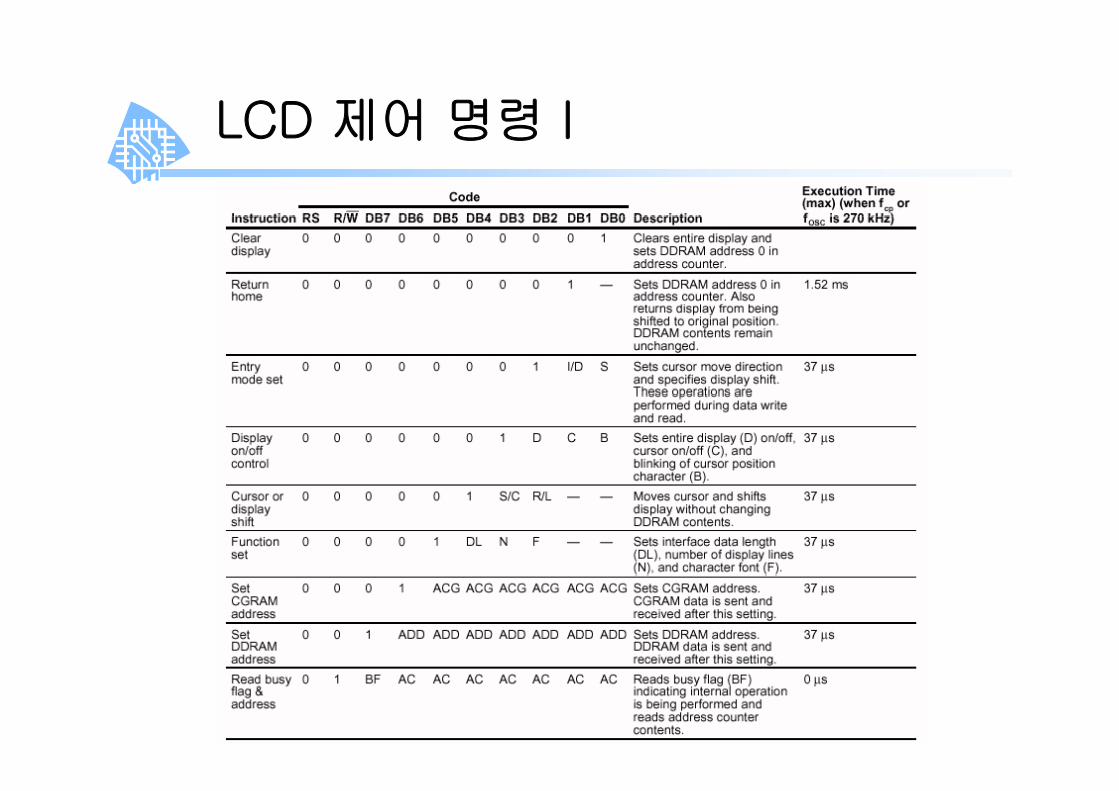
LCD 제어 명령 ILCD 제어 명령 I

LCD 제어 명령 IILCD 제어 명령 II

LCD 초기설정 FUNCTION SETFUNCTION SETLCD 초기설정 - FUNCTION SETFUNCTION SET
LCD 기능설정(FUNCTION SET) 명령
Interface의 길이, Display Line, Character font 설정
RS
0
R/W
0
DB7
0
DB6
0
DB5
1
DB4
DL
DB3
N
DB2
F
DB1
*
DB0
*
- DL : Interface 길이 F font dutyN 표시행수DL=1 : 8 bit data line
DL=0 : 4 bit data line
- N : Number of display line
0 5x8 1/80
1
1
1 5x10 1/110- N : Number of display line
- F : Type of character font* 2 5x8 1/161
LCD 기능설정은 “Busy flag/address read” 명령을 제외한 모든 명령보다 앞에서 실행되어야 한다.
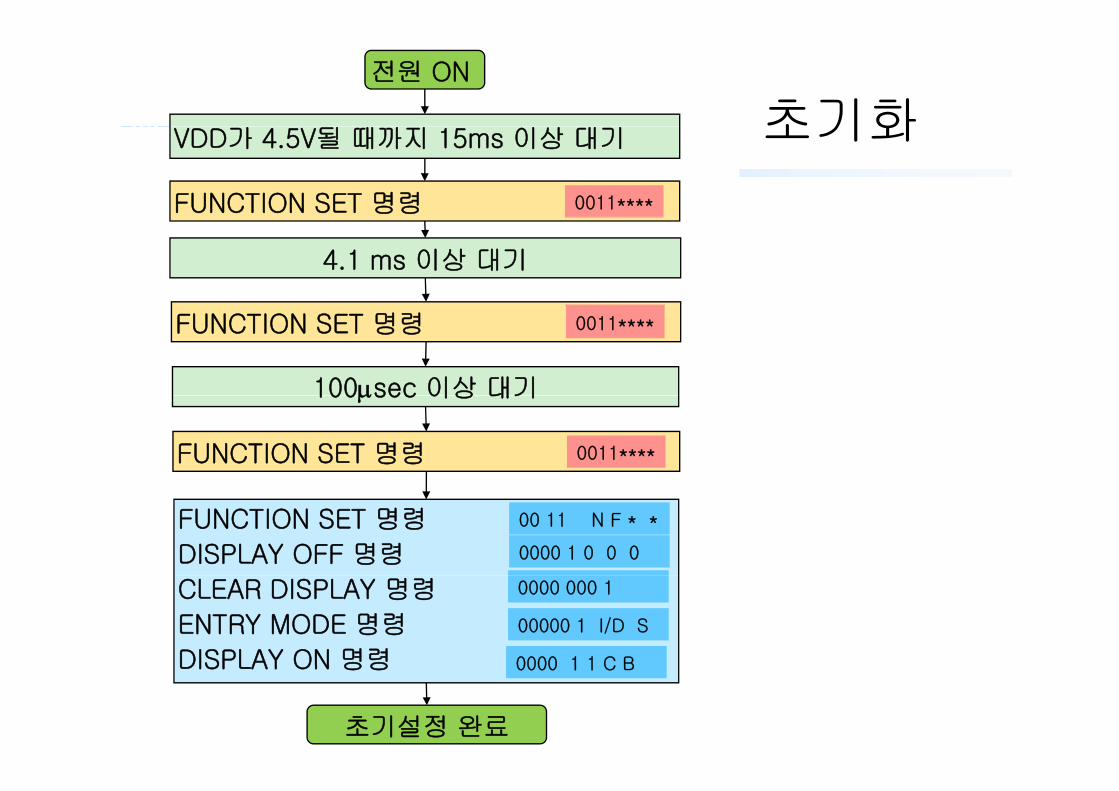
초기화전원 ON
초기화VDD가 4.5V될 때까지 15ms 이상 대기
FUNCTION SET 명령 0011****
4.1 ms 이상 대기
100μsec 이상 대기
FUNCTION SET 명령 0011****
100μsec 이상 대기
FUNCTION SET 명령 0011****
FUNCTION SET 명령
DISPLAY OFF 명령
00 11 N F * *
0000 1 0 0 0
CLEAR DISPLAY 명령
ENTRY MODE 명령
DISPLAY ON 명령
0000 000 1
00000 1 I/D S
0000 1 1 C BDISPLAY ON 명령
초기설정 완료
0000 1 1 C B
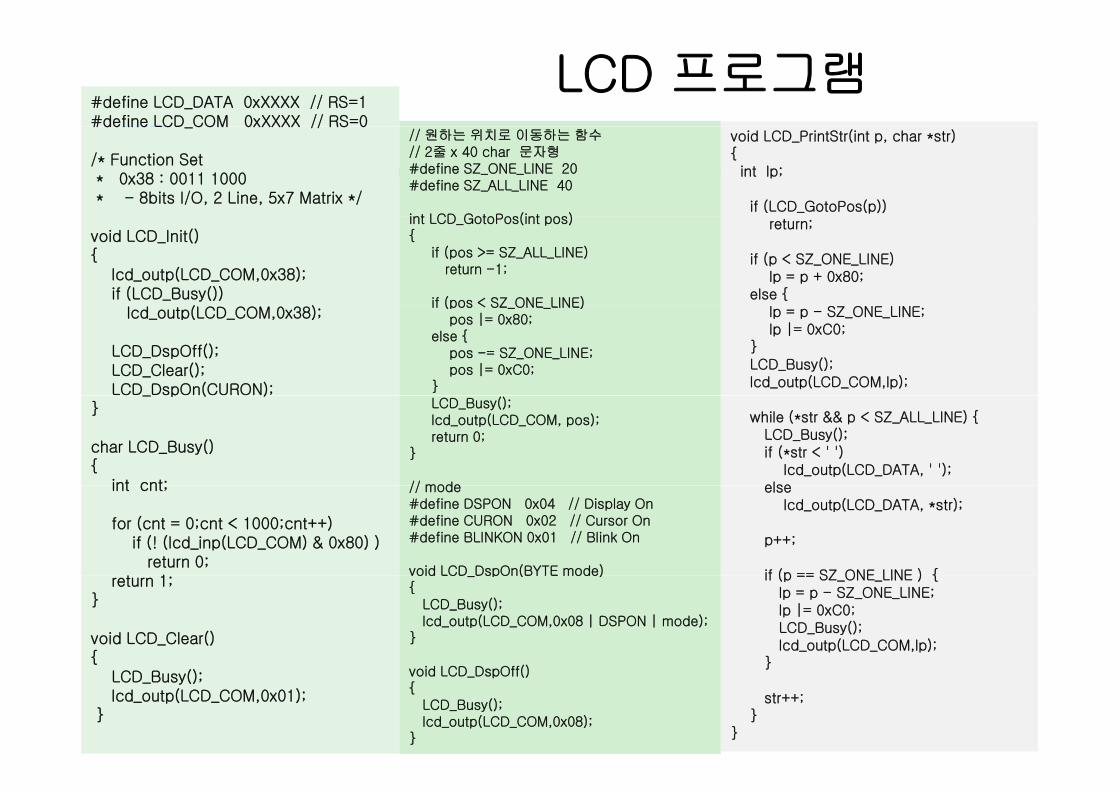
LCD 프로그램#define LCD_DATA 0xXXXX // RS=1#define LCD COM 0xXXXX // RS=0#define LCD_COM 0xXXXX // RS 0
/* Function Set* 0x38 : 0011 1000* - 8bits I/O, 2 Line, 5x7 Matrix */
void LCD_PrintStr(int p, char *str){int lp;
if (LCD_GotoPos(p))
// 원하는 위치로 이동하는 함수// 2줄 x 40 char 문자형#define SZ_ONE_LINE 20#define SZ_ALL_LINE 40
i t LCD G t P (i t )
void LCD_Init(){
lcd_outp(LCD_COM,0x38); if (LCD_Busy())
( )
return;
if (p < SZ_ONE_LINE) lp = p + 0x80;
else {
int LCD_GotoPos(int pos){
if (pos >= SZ_ALL_LINE)return -1;
if (pos < SZ ONE LINE)lcd_outp(LCD_COM,0x38);
LCD_DspOff();LCD_Clear();LCD_DspOn(CURON);
lp = p - SZ_ONE_LINE;lp |= 0xC0;
}LCD_Busy();lcd_outp(LCD_COM,lp);
if (pos < SZ_ONE_LINE) pos |= 0x80;
else {pos -= SZ_ONE_LINE;pos |= 0xC0;
}_ p ( )}
char LCD_Busy(){
int cnt;
while (*str && p < SZ_ALL_LINE) {LCD_Busy();if (*str < ' ')
lcd_outp(LCD_DATA, ' ');else
LCD_Busy();lcd_outp(LCD_COM, pos);return 0;
}
// modeint cnt;
for (cnt = 0;cnt < 1000;cnt++) if (! (lcd_inp(LCD_COM) & 0x80) )
return 0;1
elselcd_outp(LCD_DATA, *str);
p++;
if (p == SZ ONE LINE ) {
// mode#define DSPON 0x04 // Display On#define CURON 0x02 // Cursor On#define BLINKON 0x01 // Blink On
void LCD DspOn(BYTE mode)return 1;
}
void LCD_Clear(){
if (p == SZ_ONE_LINE ) {lp = p - SZ_ONE_LINE;lp |= 0xC0;LCD_Busy();lcd_outp(LCD_COM,lp);
}
void LCD_DspOn(BYTE mode){
LCD_Busy();lcd_outp(LCD_COM,0x08 | DSPON | mode);
}
()LCD_Busy();lcd_outp(LCD_COM,0x01);
}
}
str++;}
}
void LCD_DspOff(){
LCD_Busy();lcd_outp(LCD_COM,0x08);
}
CPU의 기본 이론CPU의 기본 이론
인터럽트인터럽트인터럽트인터럽트(Interrupt)(Interrupt)
인터럽트인터럽트
인터럽트는 가 어느 프로그램 코드를인터럽트는 CPU가 어느 프로그램 코드를실행하고 있을 때, 프로그램을 동작을 멈추고 인터럽트를 요구하는 모듈에 처리를하는 과정을 말한다.
보통 CPU외의 Timer, Serial, 포트 등의 상태변화가 있을 때 CPU에게 알려 이에 맞는 동작을 하는 프로그램이 실행을 하는 프로그램이 실행
예를 들어 포트에 연결된 키가 눌려지면 인터럽트로 CPU에 알리고 현재 진행중인 프로그럽트로 CPU에 알리고 현재 진행중인 프로그램을 멈추고 키 처리 루틴을 실행
처리 방법처리 방법
CPU가 어느 부분의 프로그램 코드를 실행하고CPU가 어느 부분의 프로그램 코드를 실행하고있는 지를 인터럽트을 발생하는 부분에서는 모른다른다. 임의의 코드를 중지하고 현재 레지스터 값을 대피하고 인터럽트 발생한 부분의 프로그램을 찾
( )는다. ( 프로그램은 이미 결정되어 있음) 인터럽트의 발생 부분의 코드를 처리 한다.
( )처리가 끝나면 RETI(기계어 코드)에 따라 종료하고 대피한 레지스터를 복귀 한다.레지스터가 복귀되면 이전의 프로그램이 자동레지스터가 복귀되면 이전의 프로그램이 자동으로 계속 된다.
인터럽트의 발생부와 코드의 위치인터럽트의 발생부와 코드의 위치
CPU가 인터럽트에 대응하는 프로그램은 찾은CPU가 인터럽트에 대응하는 프로그램은 찾은방법은 주로 2가지를 사용 한다.
이미 결정된 주소를 점프한다이미 결정된 주소를 점프한다.8051, 8080, Z-80
CPU는 현재 실행중인 코드를 종료하고 정해진 주소로CPU는 현재 실행중인 코드를 종료하고 정해진 주소로점프(PC값 변경)
벡터 테이블을 찾아 주소 값을 읽고, 이 주소로 점프한다한다.
80386, 68000, ARM
CPU는 현재 실행중인 코드를 종료하고 벡터테이블에서CPU는 현재 실행중인 드를 종료하고 벡터테이블에서주소값을 읽는다.
읽혀진 주소값으로 점프(PC 값 변경)
인터럽트 처리 시 레지스터 대피인터럽트 처리 시 레지스터 대피
보통 스택 ( )을 이용하여 레지스터보통 스택 (stack)을 이용하여 레지스터를 저장 한다.
인터럽트 루틴 시작에서 PUSH 명령을 사용하여 저장
C의 경우 interrupt을 사용한 함수에서 자동 저장
레지스터 뱅크를 사용하는 방법레지스터 뱅크가 있어 레지스터 블록이 여러개 일 경우 현재 레지스터 뱅크를 다른 뱅크로변경 => 현재 실행되는 상태는 유지
CPU의 기본 이론CPU의 기본 이론
램램프로그램프로그램
프로그램과 메모리 사용(CPU)프로그램과 메모리 사용(CPU)
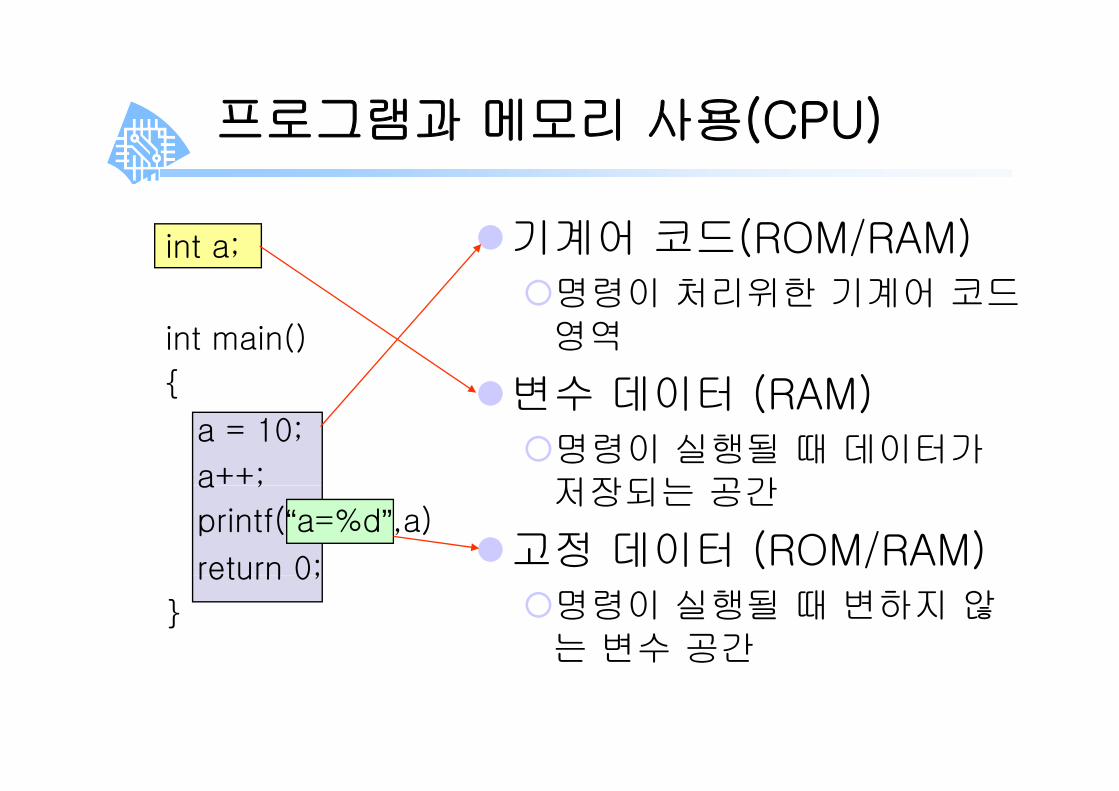
기계어 코드(ROM/RAM)명령이 처리위한 기계어 코드
int a;
명령이 처리위한 기계어영역
변수 데이터 (RAM)
int main()
{ 변수 데이터 (RAM)명령이 실행될 때 데이터가저장되는 공간
{
a = 10;
a++; 저장되는 공간
고정 데이터 (ROM/RAM)
a ;
printf(“a=%d”,a)
return 0;명령이 실행될 때 변하지 않는 변수 공간
return 0;
}

메모리와 변수와의 관계메모리와 변수와의 관계
프로그램 코드를 할 때, 코드와 변수 공간이 필요하다.이 하다
C와 어셈블리와는 표현 방식이 다르다.C에서 i t h 로 변수 선언을 하면 메모C에서 int, char, … 로 변수 선언을 하면 메모리의 특정 부분이 할당 된다. 자동 변수의 경우는 레지스터로 할당되는 경우도 있다우는 레지스터로 할당되는 경우도 있다.
어셈블리에서는 EQU로 특정 주소를 직접 지정하고 사용 한다정하고 사용 한다.
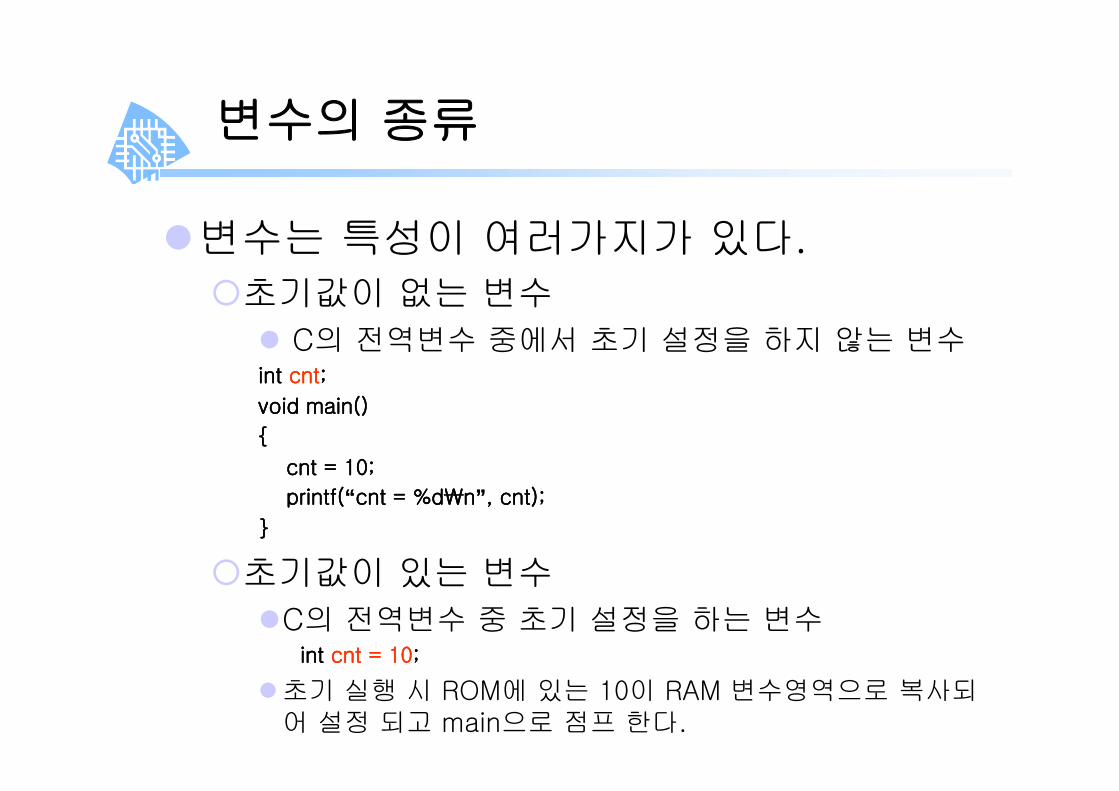
변수의 종류변수의 종류
변수는 특성이 여러가지가 있다.초기값이 없는 변수기값이 없는 변수
C의 전역변수 중에서 초기 설정을 하지 않는 변수int int cntcnt;;
void main()void main()
{{
cnt = 10;cnt = 10;
printf(printf(““cnt = %dcnt = %d₩₩nn””, cnt);, cnt);
}}
초기값이 있는 변수초기값이 있는 변수C의 전역변수 중 초기 설정을 하는 변수
int int cnt = 10cnt = 10;;
초기 실행 시 ROM에 있는 10이 RAM 변수영역으로 복사되어 설정 되고 main으로 점프 한다.
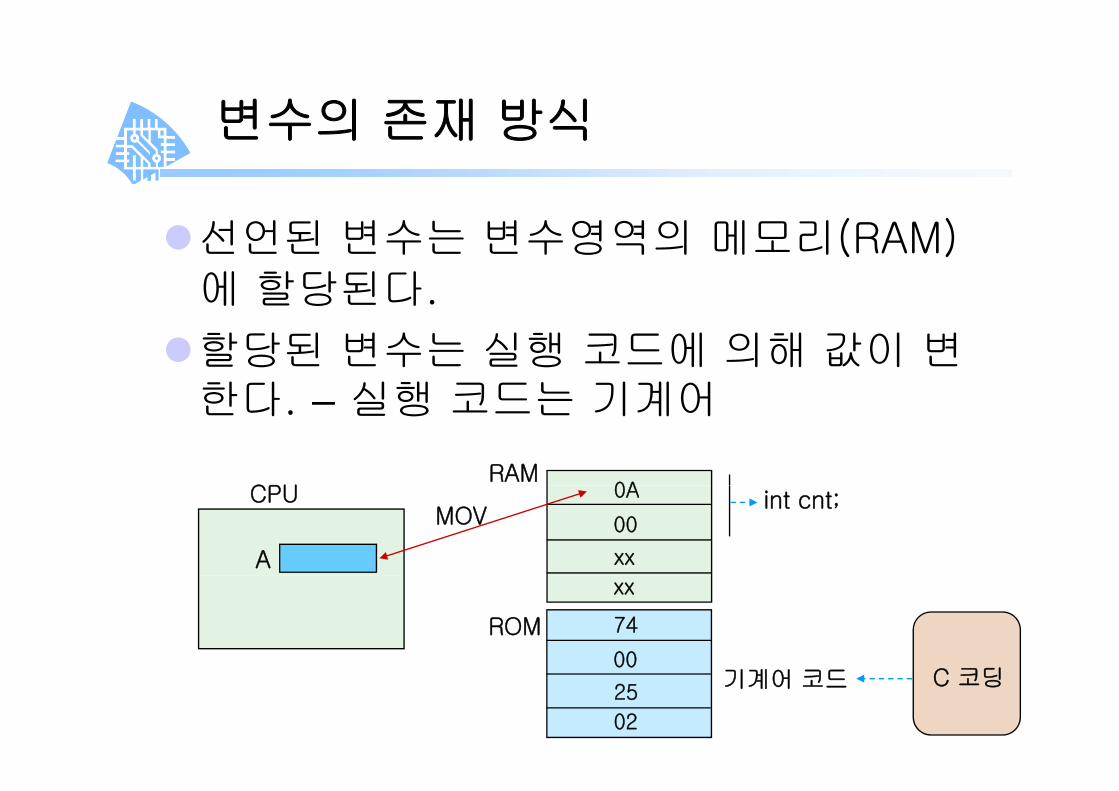
변수의 존재 방식변수의 존재 방식
선언된 변수는 변수영역의 메모리(RAM)에 할당된다.에 당 다
할당된 변수는 실행 코드에 의해 값이 변한다 실행 코드는 기계어한다. – 실행 코드는 기계어
CPURAM
0ACPU int cnt;0A
00
xx
MOV
A
ROM
xx
74
00기계어 코드
00
25
02
C 코딩
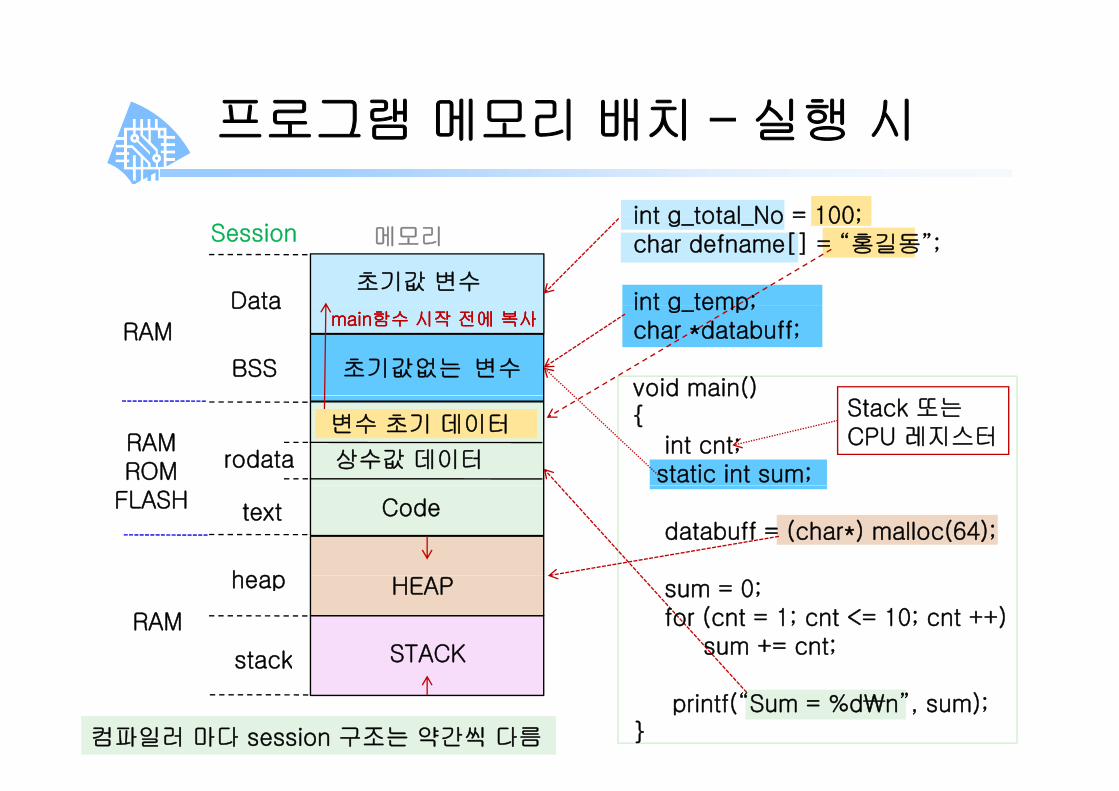
프로그램 메모리 배치 – 실행 시프로그램 메모리 배치 실행 시
int g total No = 100;
초기값 변수Data
int g_total_No = 100;char defname[] = “홍길동”;
int g temp;
Session 메모리
초기값없는 변수BSS
Data int g_temp;char *databuff;
void main()
mainmain함수함수 시작시작 전에전에 복사복사RAM
rodata
Stack 또는CPU 레지스터
상수값 데이터
void main(){
int cnt;static int sum;
변수 초기 데이터RAMROM
Codetext
heap
databuff = (char*) malloc(64);
FLASH
HEAP
STACK
heap
stack
sum = 0;for (cnt = 1; cnt <= 10; cnt ++)
sum += cnt;RAM
stack
printf(“Sum = %d₩n”, sum);}컴파일러 마다 session 구조는 약간씩 다름

프로그램 실행 모델 – 일반 OS프로그램 실행 모델 일반 OS
WindowWindow 또는또는 linuxlinux
초기값 변수Data
Session 메모리Window Window 또는또는 linuxlinux
1. 사용자에 의해 프로그램이 프로그램에 선택되면 하드디스크나 기타보조 저장 장치로 부터 RAM으로 로
초기값없는 변수BSS
Datamainmain함수함수 시작시작 전에전에 복사복사
RAM보조 저장 장치로 부터 RAM으로 로드 된다.
2. ‘변수 초기 데이터’를 초기값 변수영역으로 복사하는 등 프로그램 초
rodata 상수값 데이터
변수 초기 데이터
RAM
기 부분이 실행 된다. (개발자가 코딩하는 것이 아니라 링커가 초기 모듈을 결합)
3 main() 함수가 호출 된다Codetext
heap
3. main() 함수가 호출 된다.
임베디드임베디드HEAP
STACK
heap
stack
RAM
1. 부트로더가 플래쉬나 기타 저장장치로 부터 프로그램을 RAM에 복사한다. (통상 속도상 RAM 실행)
2 초기 프로그램을 실행하여 초기값stack 2. 초기 프로그램을 실행하여 초기값변수값을 복사한다.
3. main()을 호출 한다.

프로그램 실행 모델 – MCU/CPU프로그램 실행 모델 MCU/CPU
1 ROM 또는 FLASH에 프로그
초기값 변수Data
Session 메모리 1. ROM 또는 FLASH에 프로그램 코드가 존재 한다.
초기값없는 변수BSS
Datamainmain함수함수 시작시작 전에전에 복사복사
RAM 2. ‘변수 초기 데이터’를 초기값변수영역으로 복사하는 등 프
rodata 상수값 데이터
변수 초기 데이터
ROMFLASH
로그램 초기 부분이 실행 된다. (경우에 따라 개발자가코딩하거나 링커가 알아서 라Codetext
heap
FLASH 코딩하거나 링커가 알아서 라이브러리에서 결합)
HEAP
STACK
heap
stack
RAM 3. main() 함수가 호출 된다.
stack

프로그램과 CPU의 실행프로그램과 CPU의 실행
C와 기계어의 관계 그리고 실행
int a;
void main()
A EQU 0023H
MAIN:PUSH A컴파일러void main()
{a = 10;if (a == 10)
PUSH AMOV A,10CMP A,10JNE E dIF
컴파일러
if (a == 10)a++;
}
JNE EndIFINC A
EndIF:POP APOP ARET
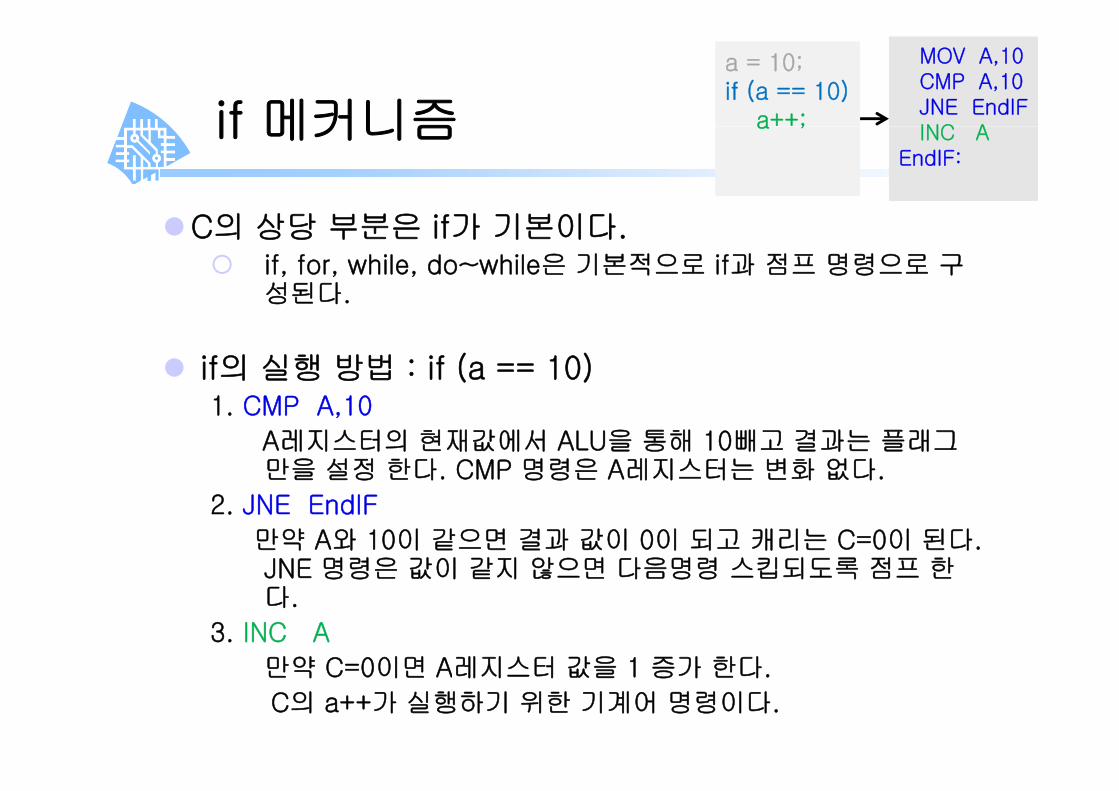
if 메커니즘
a = 10;if (a == 10)
a++;
MOV A,10CMP A,10JNE EndIFINC Aif 메커니즘
C의 상당 부분은 if가 기본이다
a ;INC A
EndIF:
C의 상당 부분은 if가 기본이다.if, for, while, do~while은 기본적으로 if과 점프 명령으로 구성된다.
if의 실행 방법 : if (a == 10)1 CM A 101. CMP A,10
A레지스터의 현재값에서 ALU을 통해 10빼고 결과는 플래그만을 설정 한다. CMP 명령은 A레지스터는 변화 없다.
2. JNE EndIF
만약 A와 10이 같으면 결과 값이 0이 되고 캐리는 C=0이 된다. JNE 명령은 값이 같지 않으면 다음명령 스킵되도록 점프 한JNE 명령은 값이 같지 않으면 다음명령 스킵되도록 점프 한다.
3. INC A
만약 C=0이면 A레지스터 값을 1 증가 한다만약 C=0이면 A레지스터 값을 1 증가 한다.
C의 a++가 실행하기 위한 기계어 명령이다.






























