Embed Size (px)
Citation preview
5 MANUAL DE USUARIO
5 MANUAL DE USUARIO5.1 INSTALACIÓN
Para la instalación de la aplicación se seguirán los siguientes pasos.
1. Instalar XNAredist.msi.
2. Instalador OFS v3.31 en modo DEMO. Para ello solo hay que escribir “DEMO” en el apartado“Part Number” cuando el programa de instalación lo requiera. Si no se tuviera instalado.NetFramwork 1.1, el instalador del OFS le pedirá que lo instale. Aunque el paquete vieneincluido en el OFS v3.31, también se puede hacer desde windowsupdate.
3. Copiar la carpeta Sim3DAC. La ubicación de esta carpeta es indiferente.
4. Instalación de Unity Pro XL. Rellenar los campos necesarios, nombre etc. Cuando elprograma solicite el número de referencia y serie, se escogerá de entre las posibilidades,la última de todas referente a updateUnity. No es necesario instalar los drivers decomunicaciones de Unity Pro pues son para conexiónes físicas.
Sistemas Operativos:
1. Win XP, Win Vista. (32bits)No se han encontrado incidencias en la ejecución de los programas mencionados.
2. Win 7 (32bits)Los siguientes archivos deben ejecutarse en modo “Compatibilidad con Windows XP SP2”.
• OFS Factory Server.• OFS Configuration Tool.• Unity Pro.
3. Win 7 (64bits)Se han visto errores en alguna distribución de Windows 7 64bits. Aunque en otras comoWindows 7 Home Premium se ha realizado una instalación correcta de los programascomentados anteriormente. Es posible que no se pueda instalar el paquete .NetFramework1.1 desde el instalador de OFS. En este caso se podría instalar via WindowsUpdate.
El modo de compatibilidad para los programas será el mismo que en el caso de Windows7(32bits).
5.2 CONFIGURACIÓN DE UNITY PROAntes de proceder a la configuracón del servidor OPC, se va a crear el proyecto en UNITY PRO,donde realizaremos la programación.
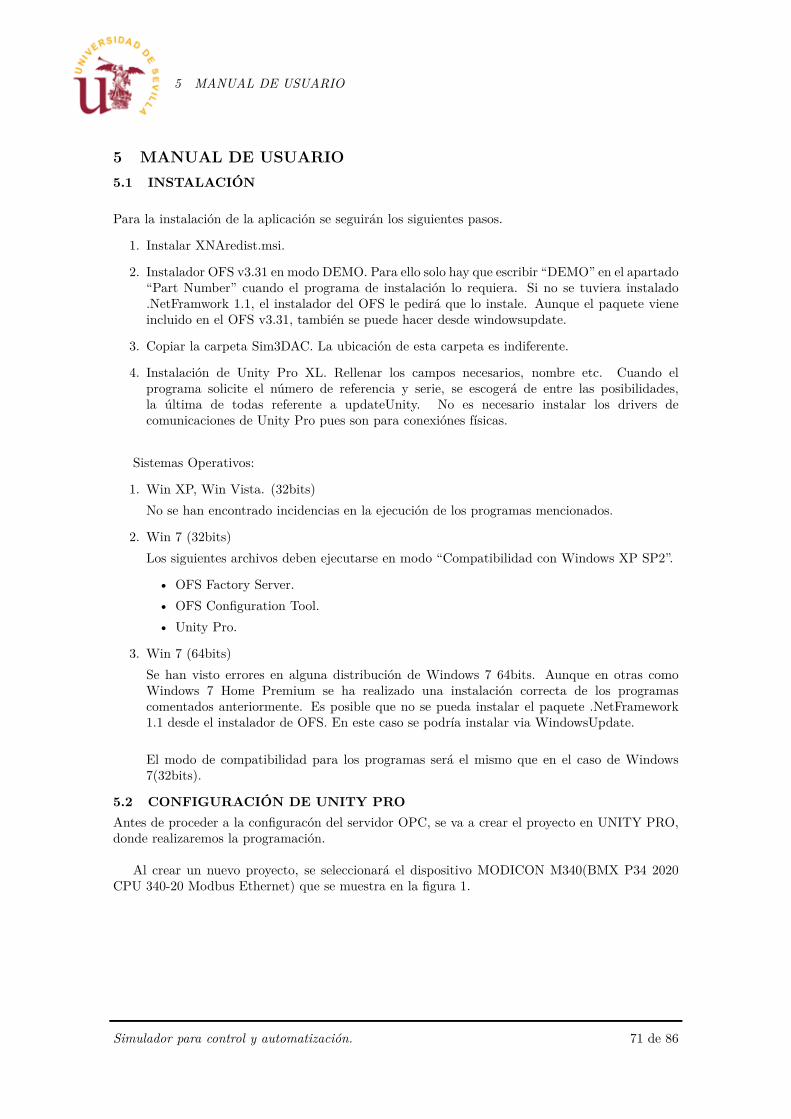
Al crear un nuevo proyecto, se seleccionará el dispositivo MODICON M340(BMX P34 2020CPU 340-20 Modbus Ethernet) que se muestra en la figura 1.
Simulador para control y automatización. 71 de 86
5 MANUAL DE USUARIO
Figure 73: Captura de pantalla creación de un dispositivo en OFS
Ahora se puede guardar el proyecto con el nombre que se desee, y pasar a la siguiente etapa dela guía. La guía de programación en UNITY PRO XL es otro documento aparte.
5.3 CONFIGURACIÓN OPC OFS 3.31
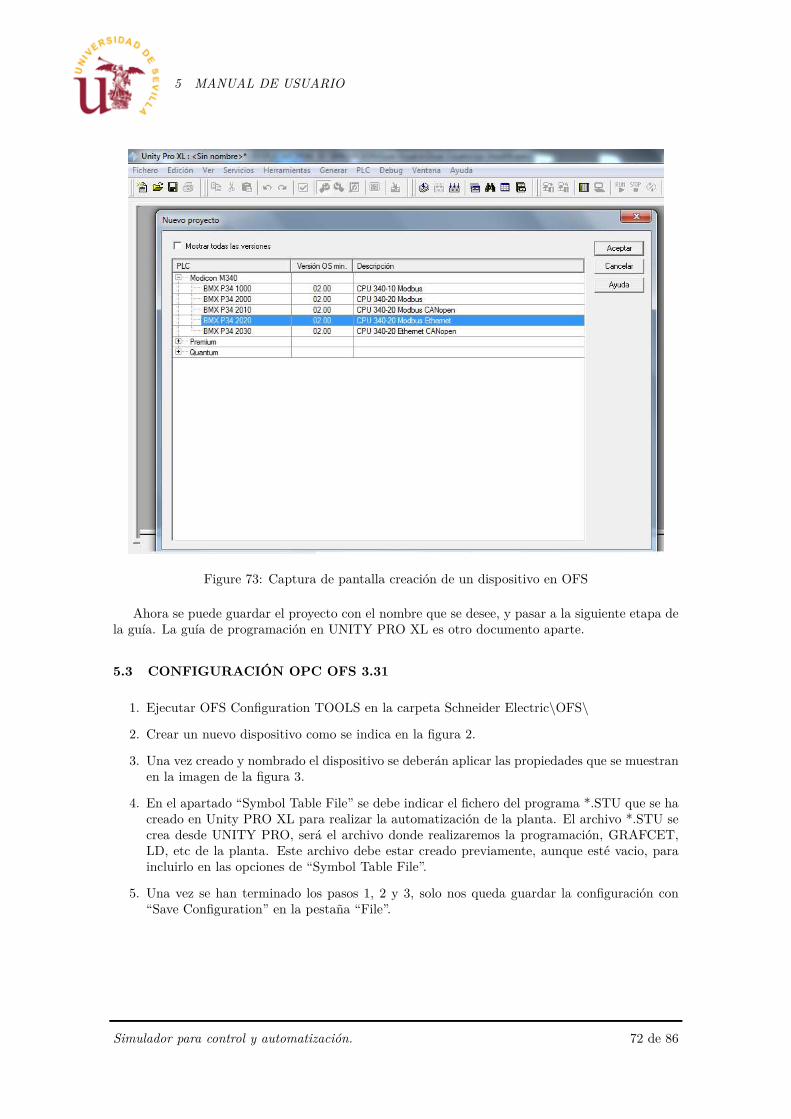
1. Ejecutar OFS Configuration TOOLS en la carpeta Schneider Electric\OFS\
2. Crear un nuevo dispositivo como se indica en la figura 2.
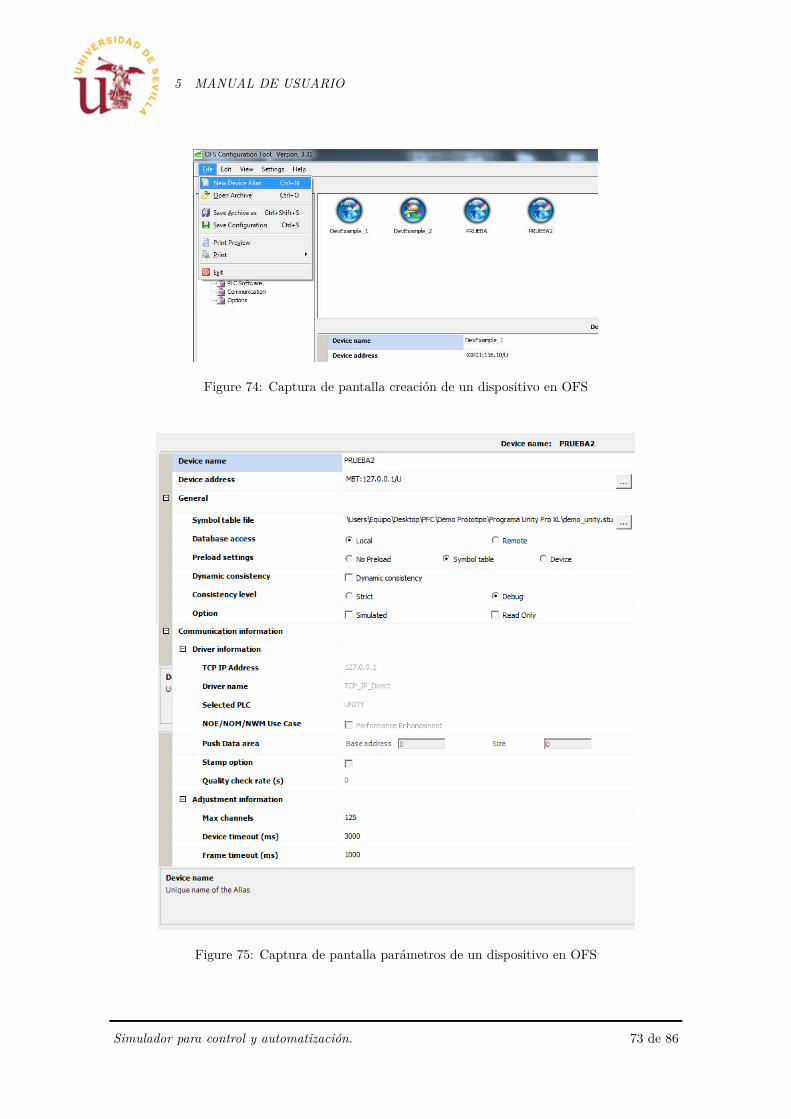
3. Una vez creado y nombrado el dispositivo se deberán aplicar las propiedades que se muestranen la imagen de la figura 3.
4. En el apartado “Symbol Table File” se debe indicar el fichero del programa *.STU que se hacreado en Unity PRO XL para realizar la automatización de la planta. El archivo *.STU secrea desde UNITY PRO, será el archivo donde realizaremos la programación, GRAFCET,LD, etc de la planta. Este archivo debe estar creado previamente, aunque esté vacio, paraincluirlo en las opciones de “Symbol Table File”.
5. Una vez se han terminado los pasos 1, 2 y 3, solo nos queda guardar la configuración con“Save Configuration” en la pestaña “File”.
Simulador para control y automatización. 72 de 86
5 MANUAL DE USUARIO
Figure 74: Captura de pantalla creación de un dispositivo en OFS
Figure 75: Captura de pantalla parámetros de un dispositivo en OFS
Simulador para control y automatización. 73 de 86
5 MANUAL DE USUARIO
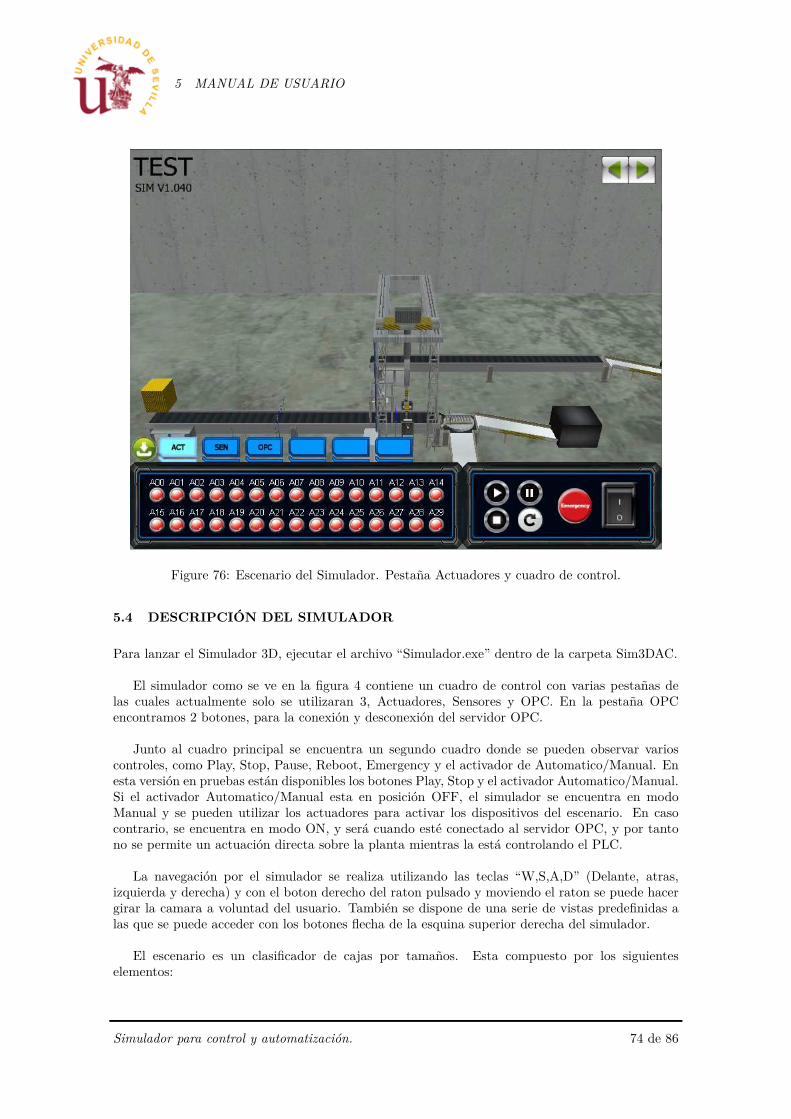
Figure 76: Escenario del Simulador. Pestaña Actuadores y cuadro de control.
5.4 DESCRIPCIÓN DEL SIMULADOR
Para lanzar el Simulador 3D, ejecutar el archivo “Simulador.exe” dentro de la carpeta Sim3DAC.
El simulador como se ve en la figura 4 contiene un cuadro de control con varias pestañas delas cuales actualmente solo se utilizaran 3, Actuadores, Sensores y OPC. En la pestaña OPCencontramos 2 botones, para la conexión y desconexión del servidor OPC.
Junto al cuadro principal se encuentra un segundo cuadro donde se pueden observar varioscontroles, como Play, Stop, Pause, Reboot, Emergency y el activador de Automatico/Manual. Enesta versión en pruebas están disponibles los botones Play, Stop y el activador Automatico/Manual.Si el activador Automatico/Manual esta en posición OFF, el simulador se encuentra en modoManual y se pueden utilizar los actuadores para activar los dispositivos del escenario. En casocontrario, se encuentra en modo ON, y será cuando esté conectado al servidor OPC, y por tantono se permite un actuación directa sobre la planta mientras la está controlando el PLC.
La navegación por el simulador se realiza utilizando las teclas “W,S,A,D” (Delante, atras,izquierda y derecha) y con el boton derecho del raton pulsado y moviendo el raton se puede hacergirar la camara a voluntad del usuario. También se dispone de una serie de vistas predefinidas alas que se puede acceder con los botones flecha de la esquina superior derecha del simulador.
El escenario es un clasificador de cajas por tamaños. Esta compuesto por los siguienteselementos:
Simulador para control y automatización. 74 de 86
5 MANUAL DE USUARIO
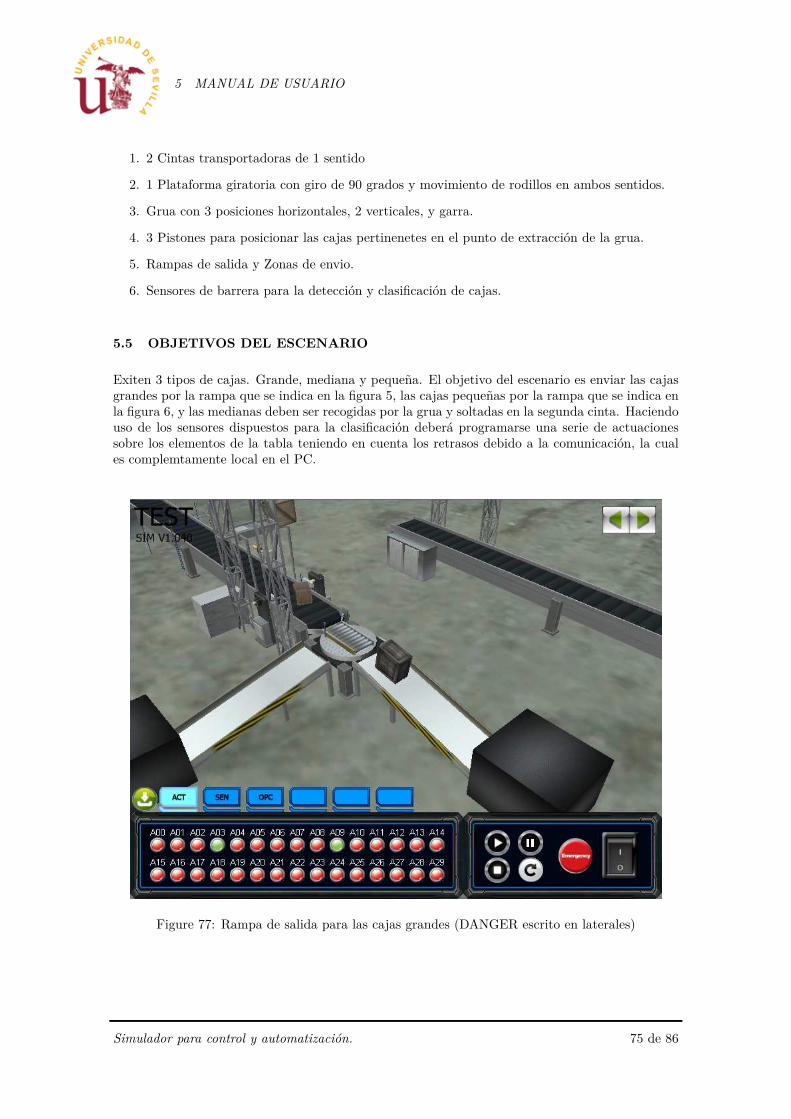
1. 2 Cintas transportadoras de 1 sentido
2. 1 Plataforma giratoria con giro de 90 grados y movimiento de rodillos en ambos sentidos.
3. Grua con 3 posiciones horizontales, 2 verticales, y garra.
4. 3 Pistones para posicionar las cajas pertinenetes en el punto de extracción de la grua.
5. Rampas de salida y Zonas de envio.
6. Sensores de barrera para la detección y clasificación de cajas.
5.5 OBJETIVOS DEL ESCENARIO
Exiten 3 tipos de cajas. Grande, mediana y pequeña. El objetivo del escenario es enviar las cajasgrandes por la rampa que se indica en la figura 5, las cajas pequeñas por la rampa que se indica enla figura 6, y las medianas deben ser recogidas por la grua y soltadas en la segunda cinta. Haciendouso de los sensores dispuestos para la clasificación deberá programarse una serie de actuacionessobre los elementos de la tabla teniendo en cuenta los retrasos debido a la comunicación, la cuales complemtamente local en el PC.
Figure 77: Rampa de salida para las cajas grandes (DANGER escrito en laterales)
Simulador para control y automatización. 75 de 86

5 MANUAL DE USUARIO
Figure 78: Rampa de salida para las cajas pequeñas
Simulador para control y automatización. 76 de 86
5 MANUAL DE USUARIO
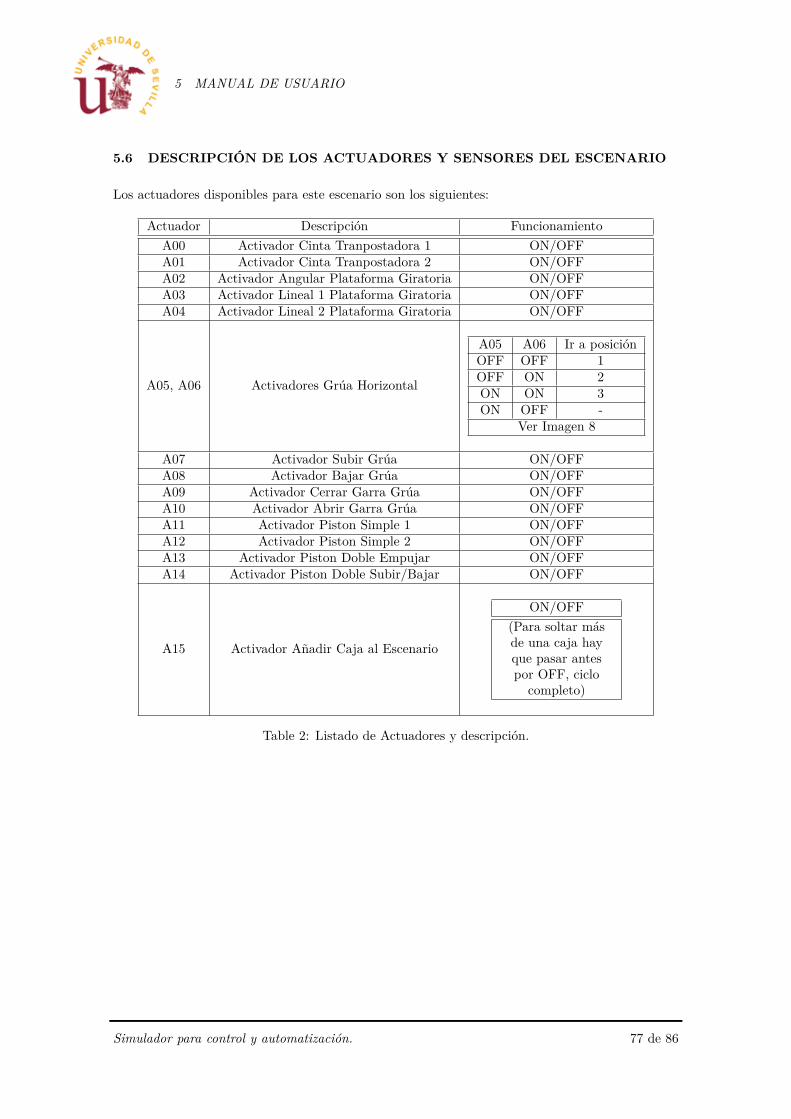
5.6 DESCRIPCIÓN DE LOS ACTUADORES Y SENSORES DEL ESCENARIO
Los actuadores disponibles para este escenario son los siguientes:
Actuador Descripción FuncionamientoA00 Activador Cinta Tranpostadora 1 ON/OFFA01 Activador Cinta Tranpostadora 2 ON/OFFA02 Activador Angular Plataforma Giratoria ON/OFFA03 Activador Lineal 1 Plataforma Giratoria ON/OFFA04 Activador Lineal 2 Plataforma Giratoria ON/OFF
A05, A06 Activadores Grúa Horizontal
A05 A06 Ir a posiciónOFF OFF 1OFF ON 2ON ON 3ON OFF -
Ver Imagen 8
A07 Activador Subir Grúa ON/OFFA08 Activador Bajar Grúa ON/OFFA09 Activador Cerrar Garra Grúa ON/OFFA10 Activador Abrir Garra Grúa ON/OFFA11 Activador Piston Simple 1 ON/OFFA12 Activador Piston Simple 2 ON/OFFA13 Activador Piston Doble Empujar ON/OFFA14 Activador Piston Doble Subir/Bajar ON/OFF
A15 Activador Añadir Caja al Escenario
ON/OFF(Para soltar másde una caja hayque pasar antespor OFF, ciclo
completo)
Table 2: Listado de Actuadores y descripción.
Simulador para control y automatización. 77 de 86
5 MANUAL DE USUARIO
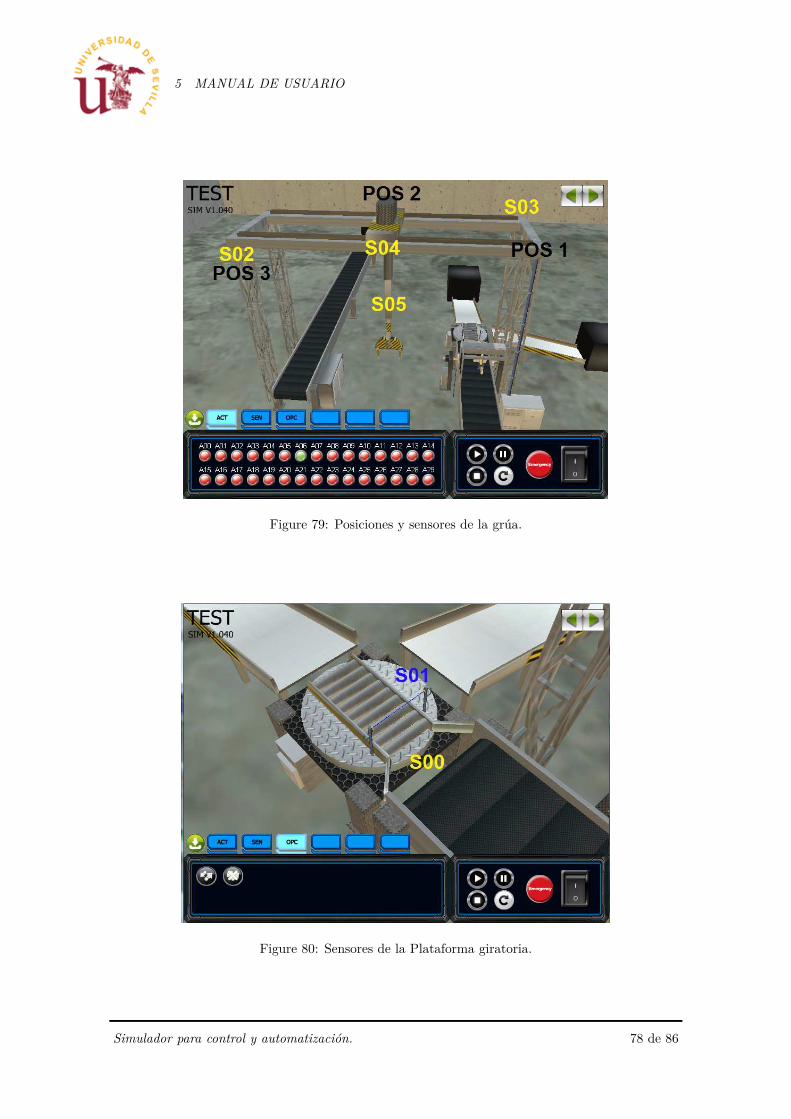
Figure 79: Posiciones y sensores de la grúa.
Figure 80: Sensores de la Plataforma giratoria.
Simulador para control y automatización. 78 de 86
5 MANUAL DE USUARIO
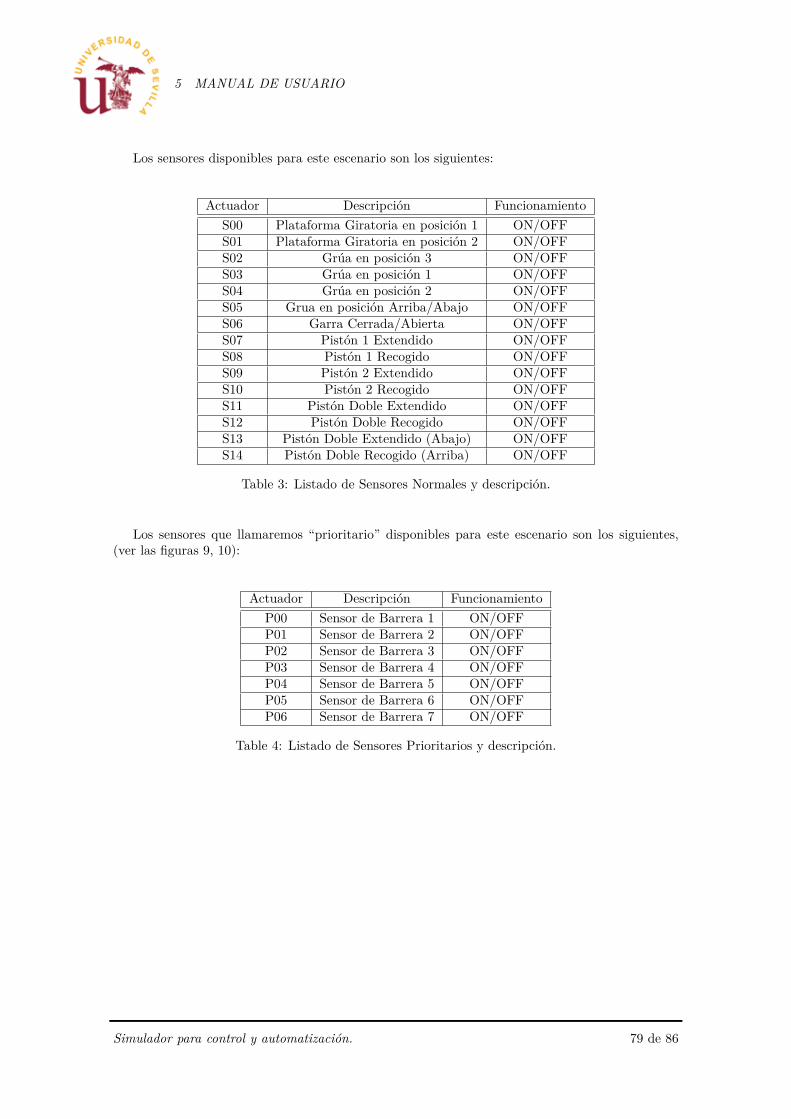
Los sensores disponibles para este escenario son los siguientes:
Actuador Descripción FuncionamientoS00 Plataforma Giratoria en posición 1 ON/OFFS01 Plataforma Giratoria en posición 2 ON/OFFS02 Grúa en posición 3 ON/OFFS03 Grúa en posición 1 ON/OFFS04 Grúa en posición 2 ON/OFFS05 Grua en posición Arriba/Abajo ON/OFFS06 Garra Cerrada/Abierta ON/OFFS07 Pistón 1 Extendido ON/OFFS08 Pistón 1 Recogido ON/OFFS09 Pistón 2 Extendido ON/OFFS10 Pistón 2 Recogido ON/OFFS11 Pistón Doble Extendido ON/OFFS12 Pistón Doble Recogido ON/OFFS13 Pistón Doble Extendido (Abajo) ON/OFFS14 Pistón Doble Recogido (Arriba) ON/OFF
Table 3: Listado de Sensores Normales y descripción.
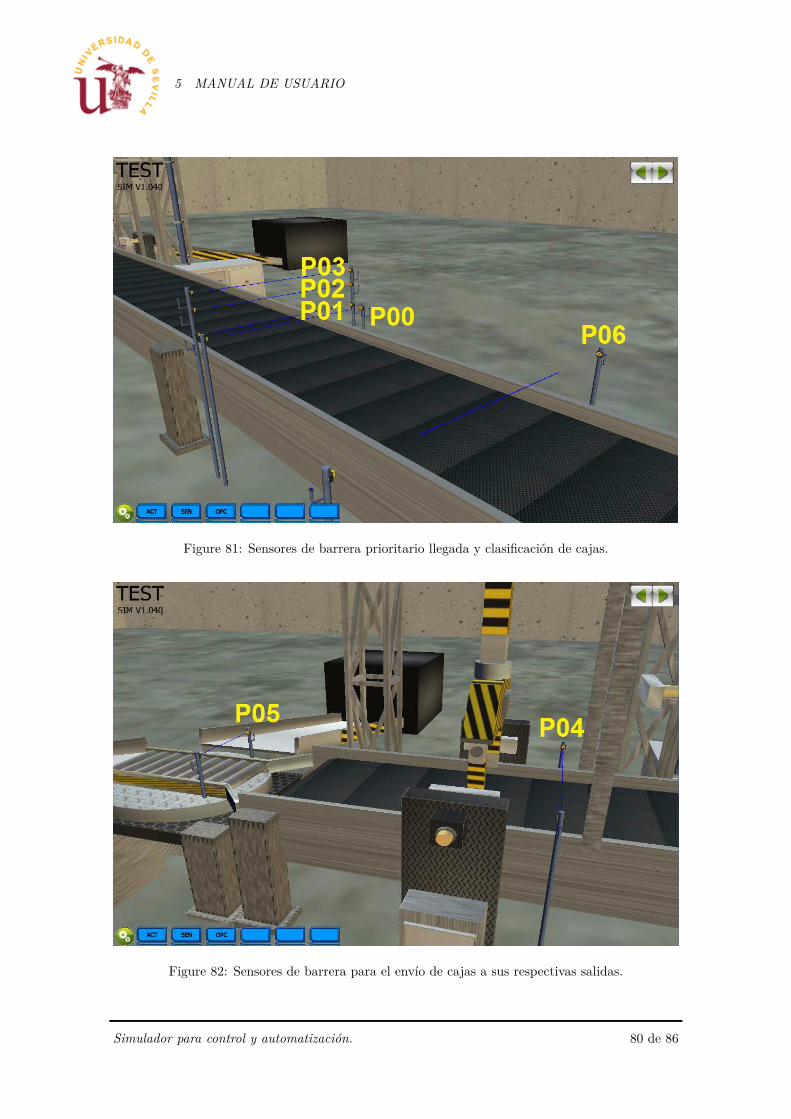
Los sensores que llamaremos “prioritario” disponibles para este escenario son los siguientes,(ver las figuras 9, 10):
Actuador Descripción FuncionamientoP00 Sensor de Barrera 1 ON/OFFP01 Sensor de Barrera 2 ON/OFFP02 Sensor de Barrera 3 ON/OFFP03 Sensor de Barrera 4 ON/OFFP04 Sensor de Barrera 5 ON/OFFP05 Sensor de Barrera 6 ON/OFFP06 Sensor de Barrera 7 ON/OFF
Table 4: Listado de Sensores Prioritarios y descripción.
Simulador para control y automatización. 79 de 86
5 MANUAL DE USUARIO
Figure 81: Sensores de barrera prioritario llegada y clasificación de cajas.
Figure 82: Sensores de barrera para el envío de cajas a sus respectivas salidas.
Simulador para control y automatización. 80 de 86
5 MANUAL DE USUARIO
5.7 NORMAS PARA LA IMPLEMENTACIÓN DEL PROGRAMA DECONTROL EN UNITY PRO XL
Se recomienda que antes de empezar a programar en Unity Pro, se familiarice con el simulador3D mediante el uso de los actuadores, para tener en cuenta que pasa por ejemplo al pulsar 2actuadores que tengan relación directa, como es el caso de Abrir y Cerrar Grúa. Una vez se veanlas características de los actuadores y los sensores, cuando se activan y cuando se desactivan, seráel momento para comenzar a programar el autómata.
Por la naturaleza de la versión de pruebas, así como de la programación y la comunicación,existen retrasos en la escritura y lectura de las variables en el servidor OPC.
En la programación del PLC en UNITY PRO XL, las variables se llamarán como en el simulador“AXX, SXX y PXX”. Las variables para usar los botones STOP y PLAY, se llamarán “STPy RUN”. Todas las variables serán de la clase “BOOL”. Estas son las variables con las que secomunicarán el PLC y el Simulador. No obstante se pueden utilizar todas las variables auxiliaresque se requieran para obtener un buen rendimiento en el funcionamiento de la planta.
Antes se ha hablado de sensores prioritarios. Se llaman así pues al ser sensores de activación porpaso de elementos, es crucial obtener su estado. Aunque de ésto no se tiene que preocupar el usuario.Solo se preocupará de su activación o desactivación, pero realizando los cambios pertinentes enotras variables o estados del PLC inmediatamente.
Los sensores con nomenclatura “SXX”, permanecen siempre en un estado a lo largo del tiempohasta que se activan/desactivan y cambien de estado. No son críticos, como el caso de losprioritarios. El actuador Automatico/Manual no se programa en el PLC, pues es exclusivo delsimulador.
El simulador está en fase de pruebas. Pueden encontrarse algunos errores con los modelos.Se ha detectado un fallo de desconexión del simulador con el servidor OPC, al pulsar el botóncorrespondiente, cuando se ha estado simulando junto con el servidor y el PLC un periodo detiempo largo. En caso de ocurrir, basta con cerrar la aplicación y el Servidor OPC, y volver asimular.
5.8 CONEXIÓN Y EJECUCIÓN PLC-OPC-SIMULADORUna vez se tiene un programa para el control de la planta, se realizarán los siguientes pasos:
1. Unity Pro debe estar ejecutandose antes que el servidor OFS.
2. Arrancar el simulador del PLC, generar/compilar el proyecto de Unity Pro y cargarlo en elPLC. Mantener el PLC en STOP, que no empiece la ejecución del programa cargado.
3. Ejecutar el servidor OPC OFS en modo prueba.
4. Ejecutar el simulador 3D.
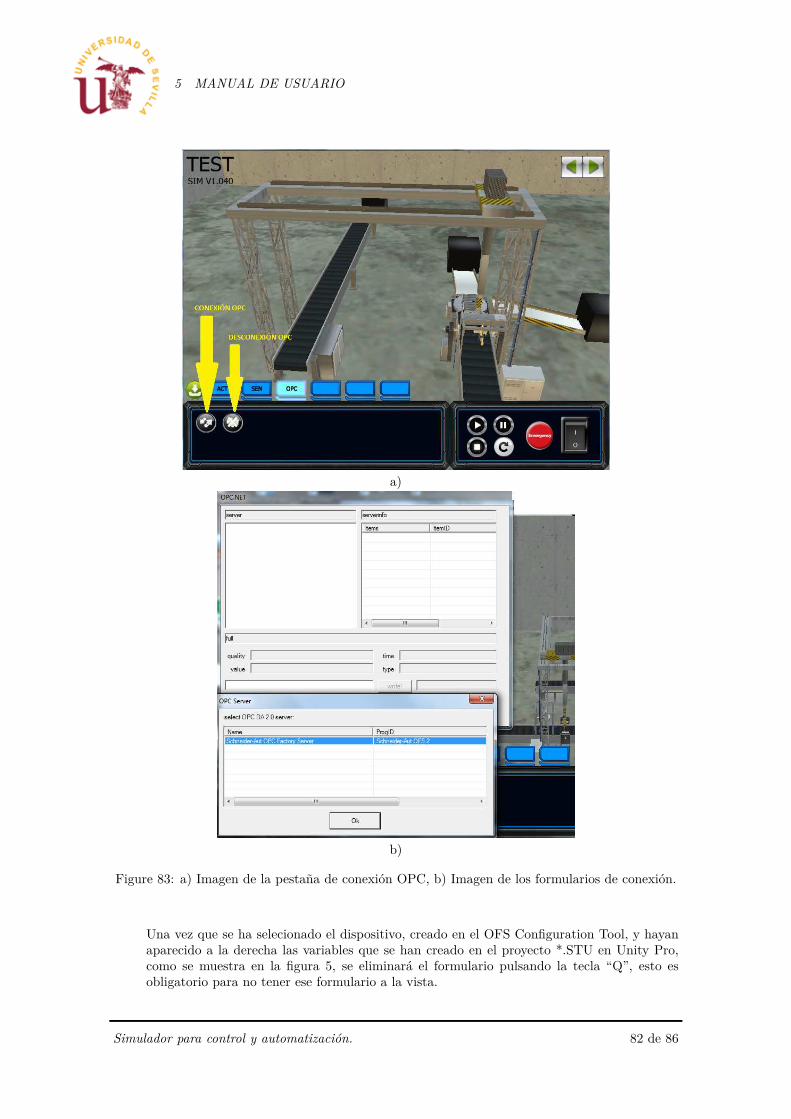
5. Realizar la conexión del simulador con el OPC. Para realizar la conexión OPC solo pulsarsobre el boton que se indica en la imagen a) de la figura 4 y aparecerá un formulario comose observa en la imagen b). Se escogerá el servidor que se ha instalado “Schneider-Aut OPCFactory Server”, y posteriormente, el dispositivo que se haya creado con el OFS ConfigurationTool.
Simulador para control y automatización. 81 de 86
5 MANUAL DE USUARIO
a)
b)
Figure 83: a) Imagen de la pestaña de conexión OPC, b) Imagen de los formularios de conexión.
Una vez que se ha selecionado el dispositivo, creado en el OFS Configuration Tool, y hayanaparecido a la derecha las variables que se han creado en el proyecto *.STU en Unity Pro,como se muestra en la figura 5, se eliminará el formulario pulsando la tecla “Q”, esto esobligatorio para no tener ese formulario a la vista.
Simulador para control y automatización. 82 de 86

5 MANUAL DE USUARIO
Este paso puede tardar un poco según el PC, y el número de variables totales que se hayannecesitado. Es posible que parezca que se ha quedado colgado el OFS. Aunque no se hallegado a observar este comportamiento, si tras un par de minutos siguen sin aparecer lasvariables, entonces si se dará por hecho que se ha quedado colgado.
Figure 84: Imagen de una conexión establecida entre OPC y Simulador.
6. Tras establecer la conexión entre el Simulador y el OPC Server, solo resta ejecutar el programacargado en el simulador de PLC de Unity Pro.
7. Para que el simulador 3D empiece a recibir datos, se debe pasar de manual a automaticomediante el boton indicado en la figura 12. Se recomienda, a la hora de implementar elprograma en el PLC, utilizar las variables “RUN” y “STP” como entradas en el PLC, pararecibir en el PLC las ordenes de los botones PLAY y STOP del simulador.
5.9 MODIFICACIONES DEL PROYECTO EN UNITY PRO
En caso de hacerse una prueba de un programa realizado en Unity Pro con el simulador, seprodecerá como se ha comentado en el apartado anterior. Será necesario realizar pruebas paracomprobar si la solución es correcta. En caso de hacerse una prueba y no obtener el resultadodeseado, la solución deberá ser modificada. Para ello habrá que desconectar primero el simuladordel Servidor OPC mediante el botón adecuado. Se comprueba que en el Servidor OPC el número declientes conectados es cero. Tras desconectar simulador 3D y Servidor OPC, pararemos la ejecucióndel simulador mediante el boton “Stop” que ofrece Unity Pro en la barra de herramientas. Tras
Simulador para control y automatización. 83 de 86
5 MANUAL DE USUARIO
esto, se realiza la desconexión de Unity Pro con el simulador de PLC. A partir de aquí se podrámodificar la solución y volver a empezar con las pruebas. Siempre debe guardarse el proyecto*.STU antes de realizar la prueba para que el servidor OPC disponga de las nuevas variables quese hayan creado.
5.10 VIDEO DE EJEMPLO DE CONEXION Y FUNCIONAMENTO DE LAPLANTA
Aunque nunca existe una única forma de programar una planta, en el video “Demo Planta” quese adjunta, se muestra como debería ser aproximadamente el funcionamiento de la planta. En elvideo demostrativo también se incluye la conexión al servidor y la puesta en marchadel programa en el PLC.
Simulador para control y automatización. 84 de 86


















![Escuela de Administración y Negocios Licenciatura en Administración de ...repositorio.udesa.edu.ar/jspui/bitstream/10908/12094/1/[P][W] T. L... · construir un candidato dentro](https://img.pdfslide.tips/doc/110x75/5bb0a38309d3f2057e8c1c46/escuela-de-administracion-y-negocios-licenciatura-en-administracion-de-pw.jpg)










