Embed Size (px)
Citation preview
6 Wellen6.1 Grundlagen
6.1.1 Beispiele und Definition
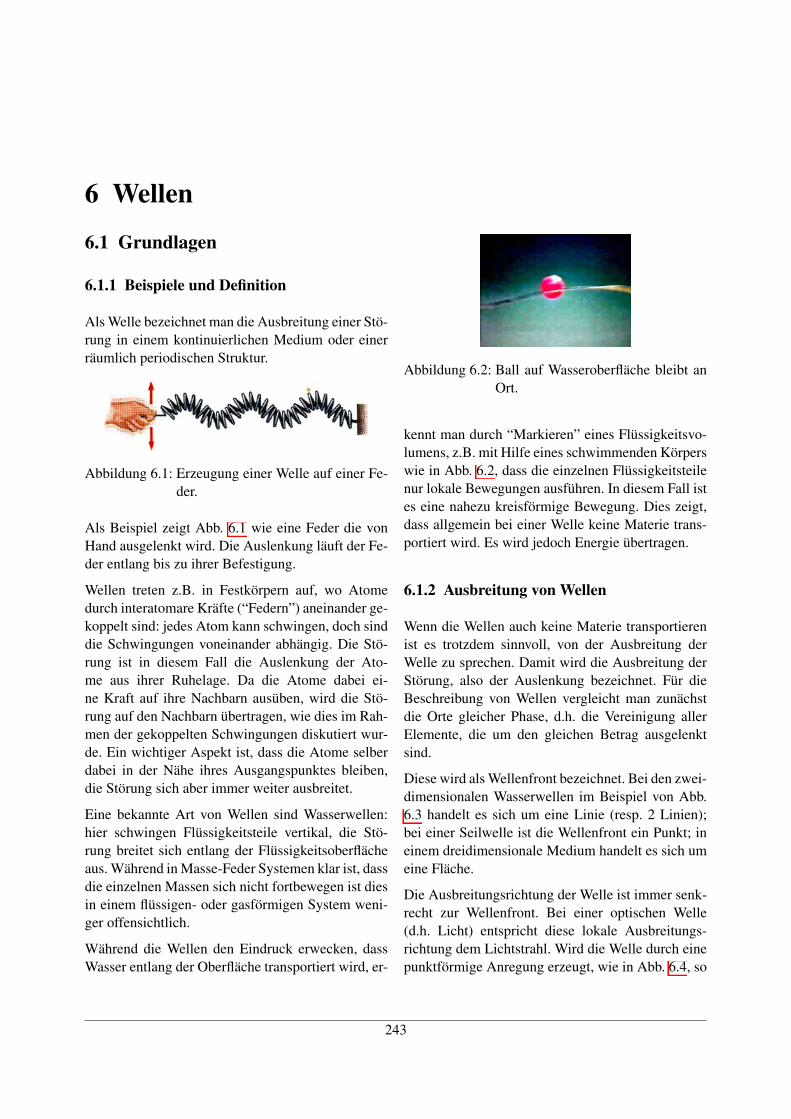
Als Welle bezeichnet man die Ausbreitung einer Stö-rung in einem kontinuierlichen Medium oder einerräumlich periodischen Struktur.
Abbildung 6.1: Erzeugung einer Welle auf einer Fe-der.
Als Beispiel zeigt Abb. 6.1 wie eine Feder die vonHand ausgelenkt wird. Die Auslenkung läuft der Fe-der entlang bis zu ihrer Befestigung.
Wellen treten z.B. in Festkörpern auf, wo Atomedurch interatomare Kräfte (“Federn”) aneinander ge-koppelt sind: jedes Atom kann schwingen, doch sinddie Schwingungen voneinander abhängig. Die Stö-rung ist in diesem Fall die Auslenkung der Ato-me aus ihrer Ruhelage. Da die Atome dabei ei-ne Kraft auf ihre Nachbarn ausüben, wird die Stö-rung auf den Nachbarn übertragen, wie dies im Rah-men der gekoppelten Schwingungen diskutiert wur-de. Ein wichtiger Aspekt ist, dass die Atome selberdabei in der Nähe ihres Ausgangspunktes bleiben,die Störung sich aber immer weiter ausbreitet.
Eine bekannte Art von Wellen sind Wasserwellen:hier schwingen Flüssigkeitsteile vertikal, die Stö-rung breitet sich entlang der Flüssigkeitsoberflächeaus. Während in Masse-Feder Systemen klar ist, dassdie einzelnen Massen sich nicht fortbewegen ist diesin einem flüssigen- oder gasförmigen System weni-ger offensichtlich.
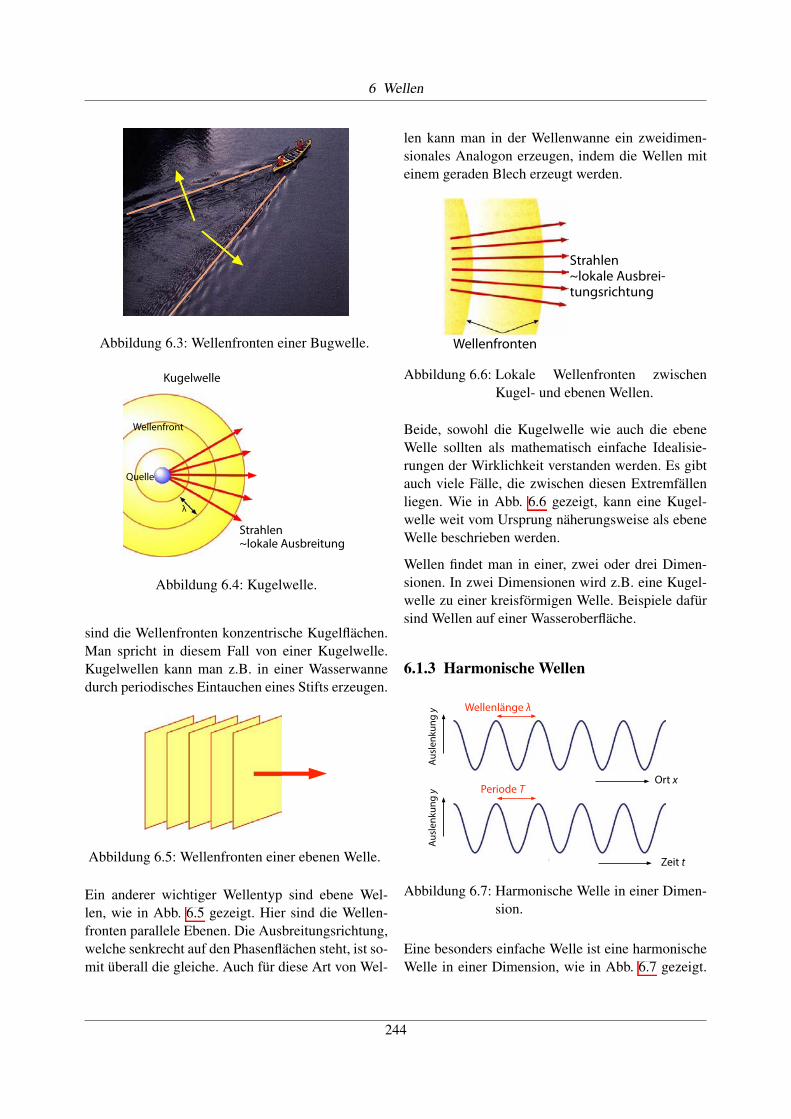
Während die Wellen den Eindruck erwecken, dassWasser entlang der Oberfläche transportiert wird, er-
Abbildung 6.2: Ball auf Wasseroberfläche bleibt anOrt.
kennt man durch “Markieren” eines Flüssigkeitsvo-lumens, z.B. mit Hilfe eines schwimmenden Körperswie in Abb. 6.2, dass die einzelnen Flüssigkeitsteilenur lokale Bewegungen ausführen. In diesem Fall istes eine nahezu kreisförmige Bewegung. Dies zeigt,dass allgemein bei einer Welle keine Materie trans-portiert wird. Es wird jedoch Energie übertragen.
6.1.2 Ausbreitung von Wellen
Wenn die Wellen auch keine Materie transportierenist es trotzdem sinnvoll, von der Ausbreitung derWelle zu sprechen. Damit wird die Ausbreitung derStörung, also der Auslenkung bezeichnet. Für dieBeschreibung von Wellen vergleicht man zunächstdie Orte gleicher Phase, d.h. die Vereinigung allerElemente, die um den gleichen Betrag ausgelenktsind.
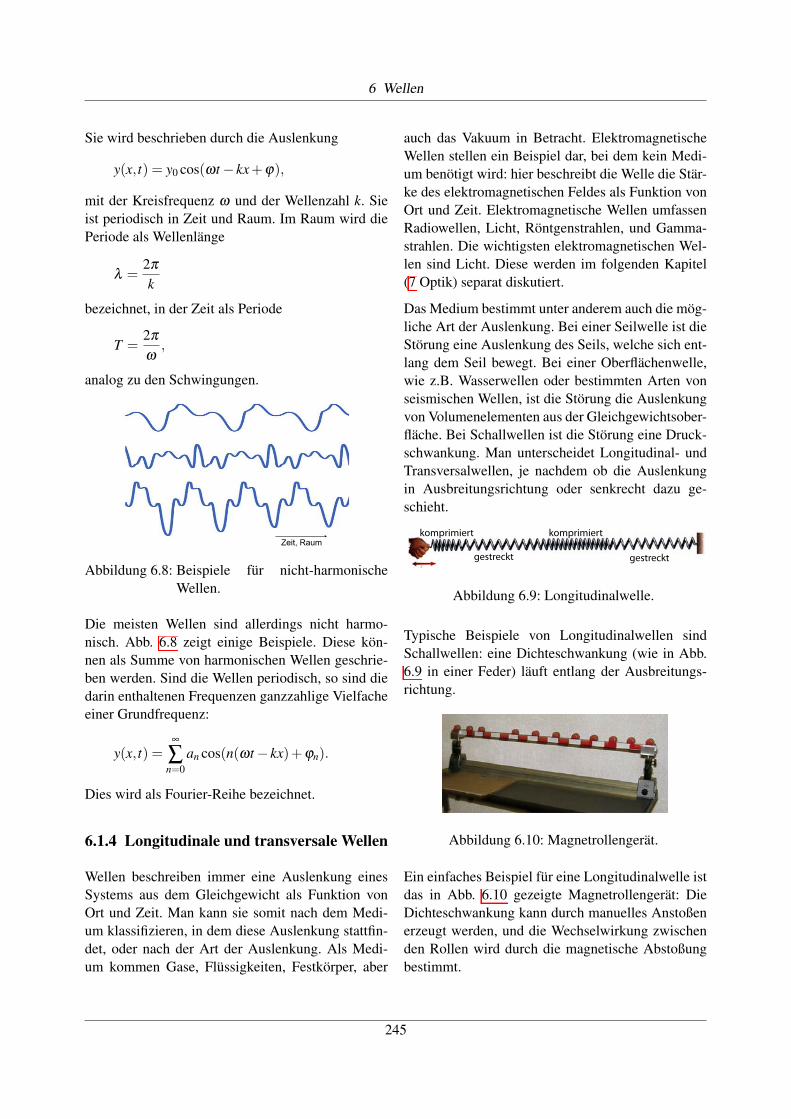
Diese wird als Wellenfront bezeichnet. Bei den zwei-dimensionalen Wasserwellen im Beispiel von Abb.6.3 handelt es sich um eine Linie (resp. 2 Linien);bei einer Seilwelle ist die Wellenfront ein Punkt; ineinem dreidimensionale Medium handelt es sich umeine Fläche.
Die Ausbreitungsrichtung der Welle ist immer senk-recht zur Wellenfront. Bei einer optischen Welle(d.h. Licht) entspricht diese lokale Ausbreitungs-richtung dem Lichtstrahl. Wird die Welle durch einepunktförmige Anregung erzeugt, wie in Abb. 6.4, so
243
6 Wellen
Abbildung 6.3: Wellenfronten einer Bugwelle.
Wellenfront
Quelle
Kugelwelle
λ
Strahlen ~lokale Ausbreitung
Abbildung 6.4: Kugelwelle.
sind die Wellenfronten konzentrische Kugelflächen.Man spricht in diesem Fall von einer Kugelwelle.Kugelwellen kann man z.B. in einer Wasserwannedurch periodisches Eintauchen eines Stifts erzeugen.ebene Welle
Abbildung 6.5: Wellenfronten einer ebenen Welle.
Ein anderer wichtiger Wellentyp sind ebene Wel-len, wie in Abb. 6.5 gezeigt. Hier sind die Wellen-fronten parallele Ebenen. Die Ausbreitungsrichtung,welche senkrecht auf den Phasenflächen steht, ist so-mit überall die gleiche. Auch für diese Art von Wel-
len kann man in der Wellenwanne ein zweidimen-sionales Analogon erzeugen, indem die Wellen miteinem geraden Blech erzeugt werden.
Strahlen ~lokale Ausbrei- tungsrichtung
Wellenfronten
Abbildung 6.6: Lokale Wellenfronten zwischenKugel- und ebenen Wellen.
Beide, sowohl die Kugelwelle wie auch die ebeneWelle sollten als mathematisch einfache Idealisie-rungen der Wirklichkeit verstanden werden. Es gibtauch viele Fälle, die zwischen diesen Extremfällenliegen. Wie in Abb. 6.6 gezeigt, kann eine Kugel-welle weit vom Ursprung näherungsweise als ebeneWelle beschrieben werden.
Wellen findet man in einer, zwei oder drei Dimen-sionen. In zwei Dimensionen wird z.B. eine Kugel-welle zu einer kreisförmigen Welle. Beispiele dafürsind Wellen auf einer Wasseroberfläche.
6.1.3 Harmonische Wellen
Ort x
Zeit t
Periode T
Wellenlänge λ
Ausle
nkun
g y
Ausl
enku
ng y
1
Abbildung 6.7: Harmonische Welle in einer Dimen-sion.
Eine besonders einfache Welle ist eine harmonischeWelle in einer Dimension, wie in Abb. 6.7 gezeigt.
244
6 Wellen
Sie wird beschrieben durch die Auslenkung
y(x, t) = y0 cos(wt � kx+j),
mit der Kreisfrequenz w und der Wellenzahl k. Sieist periodisch in Zeit und Raum. Im Raum wird diePeriode als Wellenlänge
l =2pk
bezeichnet, in der Zeit als Periode
T =2pw
,
analog zu den Schwingungen.
Zeit, Raum 1
Abbildung 6.8: Beispiele für nicht-harmonischeWellen.
Die meisten Wellen sind allerdings nicht harmo-nisch. Abb. 6.8 zeigt einige Beispiele. Diese kön-nen als Summe von harmonischen Wellen geschrie-ben werden. Sind die Wellen periodisch, so sind diedarin enthaltenen Frequenzen ganzzahlige Vielfacheeiner Grundfrequenz:
y(x, t) =•
Ân=0
an cos(n(wt � kx)+jn).
Dies wird als Fourier-Reihe bezeichnet.
6.1.4 Longitudinale und transversale Wellen
Wellen beschreiben immer eine Auslenkung einesSystems aus dem Gleichgewicht als Funktion vonOrt und Zeit. Man kann sie somit nach dem Medi-um klassifizieren, in dem diese Auslenkung stattfin-det, oder nach der Art der Auslenkung. Als Medi-um kommen Gase, Flüssigkeiten, Festkörper, aber
auch das Vakuum in Betracht. ElektromagnetischeWellen stellen ein Beispiel dar, bei dem kein Medi-um benötigt wird: hier beschreibt die Welle die Stär-ke des elektromagnetischen Feldes als Funktion vonOrt und Zeit. Elektromagnetische Wellen umfassenRadiowellen, Licht, Röntgenstrahlen, und Gamma-strahlen. Die wichtigsten elektromagnetischen Wel-len sind Licht. Diese werden im folgenden Kapitel(7 Optik) separat diskutiert.
Das Medium bestimmt unter anderem auch die mög-liche Art der Auslenkung. Bei einer Seilwelle ist dieStörung eine Auslenkung des Seils, welche sich ent-lang dem Seil bewegt. Bei einer Oberflächenwelle,wie z.B. Wasserwellen oder bestimmten Arten vonseismischen Wellen, ist die Störung die Auslenkungvon Volumenelementen aus der Gleichgewichtsober-fläche. Bei Schallwellen ist die Störung eine Druck-schwankung. Man unterscheidet Longitudinal- undTransversalwellen, je nachdem ob die Auslenkungin Ausbreitungsrichtung oder senkrecht dazu ge-schieht.
komprimiert komprimiert
gestreckt gestreckt
Abbildung 6.9: Longitudinalwelle.
Typische Beispiele von Longitudinalwellen sindSchallwellen: eine Dichteschwankung (wie in Abb.6.9 in einer Feder) läuft entlang der Ausbreitungs-richtung.
Abbildung 6.10: Magnetrollengerät.
Ein einfaches Beispiel für eine Longitudinalwelle istdas in Abb. 6.10 gezeigte Magnetrollengerät: DieDichteschwankung kann durch manuelles Anstoßenerzeugt werden, und die Wechselwirkung zwischenden Rollen wird durch die magnetische Abstoßungbestimmt.
245

6 Wellen
Abbildung 6.11: Transversale Federwelle.
Im Fall der Seilwelle oder der Federwelle in Abb.6.11 findet die Auslenkung senkrecht zur Bewe-gungsrichtung statt. In diesen Fällen handelt es sichum eine Transversalwelle. Ein weiteres Beispiel sindOberflächenwellen.
x
y
z
H
Abbildung 6.12: Elektrisches und magnetischesFeld einer transversalen elektroma-gnetischen Welle.
Ein wichtiger Unterschied zwischen Longitudinal-und Transversalwellen ist, dass TransversalwellenPolarisationseffekte zeigen: sie können z.B. horizon-tal oder vertikal polarisiert sein, oder zirkular. EinBeispiel für transversale Wellen sind elektromagne-tische Wellen (! Abb. 6.12). Das elektrische undmagnetische Feld stehen senkrecht zueinander undzur Ausbreitungsrichtung. Die beiden Felder zeigendie gleiche räumliche und zeitliche Abhängigkeit.
Eine der wichtigsten Entdeckungen des letzten Jahr-hunderts war, dass auch die Konstituenten der Ma-terie, also Elementarteichen, Atome und MoleküleWelleneigenschaften besitzen. Dies konnte man zu-nächst für Elektronen zeigen; später auch für Neu-tronen, Atome, und sogar für Moleküle. Die Wellen-länge dieser Wellen hängt ab von der Masse und derGeschwindigkeit der Teilchen, ist aber meist im Be-reich von wenigen Nanometern oder Bruchteilen da-von. Details werden in Kapitel 8diskutiert.
6.1.5 Mathematische Beschreibungharmonischer Wellen
Wellen werden mathematisch durch Wellenfunktio-nen Y(x, t) dargestellt, welche die Auslenkung alsFunktion von Raum und Zeit beschreiben. Diesemuss einer Wellengleichung der Form
∂ 2Y∂ t2 = v2
p∂ 2Y∂x2
gehorchen. Hier stellt Y die Auslenkung und vpdie Phasengeschwindigkeit der Welle dar. Bei dieserGleichung handelt es sich um eine partielle Differen-tialgleichung: sie verknüpft die partielle Ableitungnach dem Ort mit der partiellen Ableitung nach derZeit.
In drei Dimensionen lautet die entsprechende Glei-chung
∂ 2Y∂ t2 = v2
p
✓∂ 2Y∂x2 +
∂ 2Y∂y2 +
∂ 2Y∂ z2
◆.
Wir beschränken uns hier hauptsächlich auf die Be-schreibung harmonischer Wellen, also Wellen beidenen die Abhängigkeit von Raum und Zeit einerharmonischen Funktion entspricht. Dies ist natürlichimmer eine Näherung, da in realen Systemen z.B. dieSchwingung sich nie unendlich lange fortsetzt unddas Medium nicht unendlich ausgedehnt ist. Trotz-dem können viele der Schlussfolgerungen auf realeSysteme übertragen werden.
Eine harmonische Welle in einer Dimension, wie inAbb. 6.7, kann geschrieben werden als
y(x, t) = y0 cos⇣
2p⇣ t
T� x
l
⌘+j
⌘
= y0 cos(wt � kx+j) . (6.1)
Hier bezeichnen y die Auslenkung, x die räumlicheund t die zeitliche Koordinate, T die Periode derWelle, l die Wellenlänge, j die Phase, w die Kreis-frequenz und k = 2p/l die Wellenzahl.
Die Verallgemeinerung auf mehrere Dimensionenerhält man, indem man für die Berechnung der Phasedie Beiträge für alle drei Koordinaten addiert:
y(~r, t) = y0 cos⇣
wt �~k ·~r +j⌘
.
246

6 Wellen
~k stellt jetzt den Wellenvektor dar; er steht senkrechtauf den Phasenflächen, in Ausbreitungsrichtung derWelle. Offensichtlich kann man diesen Fall auf deneindimensionalen Fall zurückführen, indem man diex-Achse entlang der Ausbreitungsrichtung wählt. Indiesem Fall wird~k = (kx,0,0) und das Skalarprodukt~k ·~r = kxx reduziert sich auf einen Term. Dies stimmtmit der Betrachtung der Welle als parallele Phasen-flächen überein: Das Problem hängt nicht von denKoordinaten senkrecht zur Ausbreitungsrichtung ab.
Betrachtet man die Auslenkung an einem festen Ortx, so erhält man eine einfache Oszillation (derenPhase von x abhängt):
yx(t) = y0 cos(wt +jx) (6.2)
mit
jx = j � kx.
Die Phase jx ist ortsabhängig, sie wächst in diesemFall linear mit der Koordinate x.
Die Funktion (6.1) beschreibt eine Welle, die vonlinks nach rechts (also in Richtung positives x) läuft.Eine Welle, die in entgegengesetzter Richtung läuft,kann durch einen negativen Wellenvektor dargestelltwerden.
Einsetzen von (6.2) in die Wellengleichung ergibt
∂ 2y∂ t2 = �w2y = v2
p∂ 2y∂x2 = �k2v2
py.
Somit ist die angegebene Form eine Lösung der Wel-lengleichung für vp = w/k.
6.1.6 Lineare Kette
Abbildung 6.13: Modell einer linearen Kette.
Bereits im Kapitel Schwingungen hatten wir ein Mo-dell diskutiert, in dem Massen durch Federn verbun-den sind (! Abb. 6.13). Diese Schwingungen kön-nen sich auch über die Kette ausbreiten, sich also alsWellen fortpflanzen. Dazu erweitern wir das Modell
auf eine unendlich lange Kette. Für identische Mas-sen und Federn entlang der Kette lautet die Bewe-gungsgleichung für eine einzelne Masse an der Stel-le s
mys = �c(2ys � ys�1 � ys+1).
Die rechte Seite ist eine diskrete Variante der zwei-ten Ableitung nach der Raumkoordinate; dies istsomit eine Verallgemeinerung der Wellengleichungund wir erwarten, dass sich in diesem System eineharmonische Welle ausbreiten kann.
Diese müsste in komplexer Schreibweise die Form
y(x, t) = y0ei(wt�kx) (6.3)
aufweisen. Da es sich um ein diskretes System han-delt, kann man die Ortskoordinate x durch den Indexs: x = sa ersetzen, wobei a den Abstand zwischenbenachbarten Massen im Gleichgewicht bezeichnet.Dann wird
ys(t) = y0ei(wt�ksa).
Die zweite Ableitung nach der Zeit ist
ys = �w2ys. (6.4)
Zur Auswertung der rechten Seite verwenden wir
ei(wt�k(s+1)a) = ei(wt�ksa)e�ika.
Damit lässt sich die Differenz zur Summe der Aus-lenkungen der Nachbarn schreiben als
mys = �c(2ys � ys�1 � ys+1).
mys = c(2ys � ys�1 � ys+1)
= cy0ei(wt�ksa)⇣
2� eika � e�ika⌘
= 2cys(1� cos(ka)). (6.5)
Die Beschleunigung ys wird also proportional zurAuslenkung ys.
247
6 Wellen
6.1.7 Harmonische Longitudinalwelle
Einsetzen von 6.4 in die Bewegungsgleichung (6.5)ergibt
ys = �w2ys = �2cm
(1� cos(ka))ys.
Somit ist der Wellenansatz (6.3) eine Lösung der Be-wegungsgleichung wenn
w2 = 2cm
(1� cos(ka)) = 4cm
1� cos(ka)
2.
Mit Hilfe der trignonometrischen Formel
sin2 a =1� cos(2a)
2
kann dies geschrieben werden als
w = 2r
cm
����sinka2
���� .
Wellenzahl k π /a0
Freq
uenz
ω
Abbildung 6.14: Dispersionsrelation für die lineareKette.
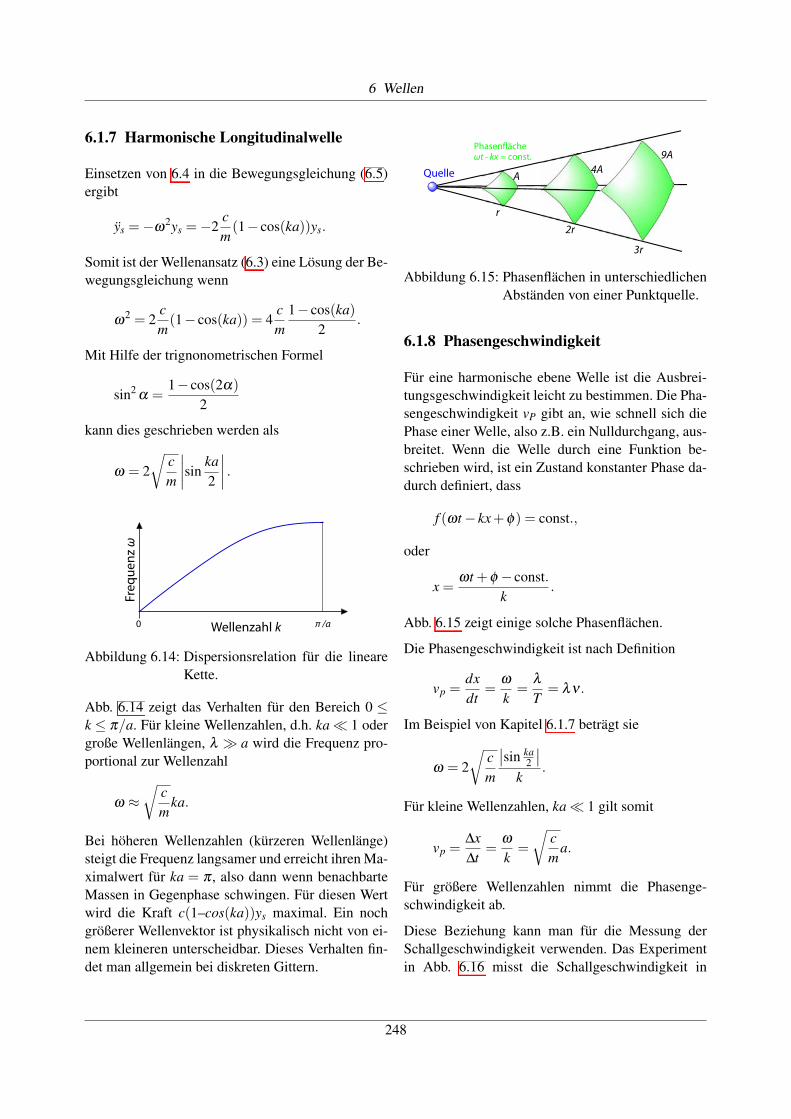
Abb. 6.14 zeigt das Verhalten für den Bereich 0 k p/a. Für kleine Wellenzahlen, d.h. ka ⌧ 1 odergroße Wellenlängen, l � a wird die Frequenz pro-portional zur Wellenzahl
w ⇡r
cm
ka.
Bei höheren Wellenzahlen (kürzeren Wellenlänge)steigt die Frequenz langsamer und erreicht ihren Ma-ximalwert für ka = p , also dann wenn benachbarteMassen in Gegenphase schwingen. Für diesen Wertwird die Kraft c(1–cos(ka))ys maximal. Ein nochgrößerer Wellenvektor ist physikalisch nicht von ei-nem kleineren unterscheidbar. Dieses Verhalten fin-det man allgemein bei diskreten Gittern.
Quelle
r2r
3r
9A4AA
Phasenfläche ωt - kx = const.
Abbildung 6.15: Phasenflächen in unterschiedlichenAbständen von einer Punktquelle.
6.1.8 Phasengeschwindigkeit
Für eine harmonische ebene Welle ist die Ausbrei-tungsgeschwindigkeit leicht zu bestimmen. Die Pha-sengeschwindigkeit vP gibt an, wie schnell sich diePhase einer Welle, also z.B. ein Nulldurchgang, aus-breitet. Wenn die Welle durch eine Funktion be-schrieben wird, ist ein Zustand konstanter Phase da-durch definiert, dass
f (wt � kx+f) = const.,
oder
x =wt +f � const.
k.
Abb. 6.15 zeigt einige solche Phasenflächen.
Die Phasengeschwindigkeit ist nach Definition
vp =dxdt
=wk
=lT
= ln .
Im Beispiel von Kapitel 6.1.7 beträgt sie
w = 2r
cm
��sin ka2
��k
.
Für kleine Wellenzahlen, ka ⌧ 1 gilt somit
vp =DxDt
=wk
=
rcm
a.
Für größere Wellenzahlen nimmt die Phasenge-schwindigkeit ab.
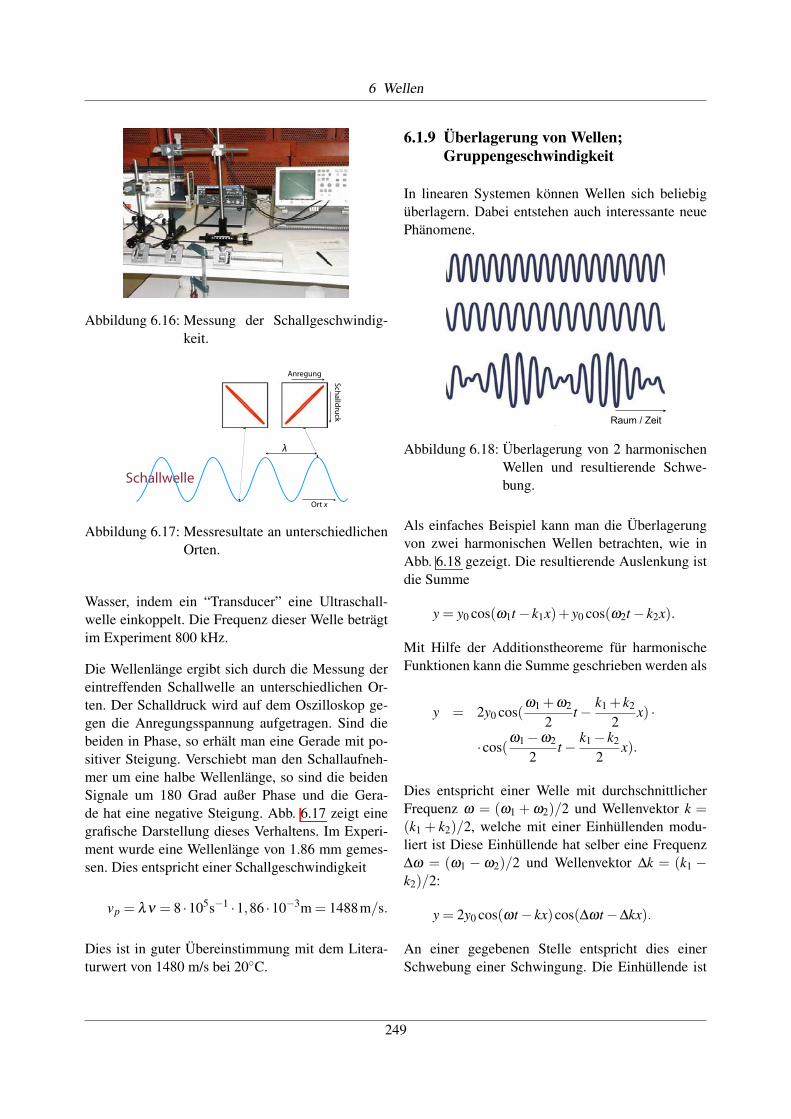
Diese Beziehung kann man für die Messung derSchallgeschwindigkeit verwenden. Das Experimentin Abb. 6.16 misst die Schallgeschwindigkeit in
248
6 Wellen
Abbildung 6.16: Messung der Schallgeschwindig-keit.
λ
Schallwelle
Anregung
Schalldruck
Ort x
Abbildung 6.17: Messresultate an unterschiedlichenOrten.
Wasser, indem ein “Transducer” eine Ultraschall-welle einkoppelt. Die Frequenz dieser Welle beträgtim Experiment 800 kHz.
Die Wellenlänge ergibt sich durch die Messung dereintreffenden Schallwelle an unterschiedlichen Or-ten. Der Schalldruck wird auf dem Oszilloskop ge-gen die Anregungsspannung aufgetragen. Sind diebeiden in Phase, so erhält man eine Gerade mit po-sitiver Steigung. Verschiebt man den Schallaufneh-mer um eine halbe Wellenlänge, so sind die beidenSignale um 180 Grad außer Phase und die Gera-de hat eine negative Steigung. Abb. 6.17 zeigt einegrafische Darstellung dieses Verhaltens. Im Experi-ment wurde eine Wellenlänge von 1.86 mm gemes-sen. Dies entspricht einer Schallgeschwindigkeit
vp = ln = 8 ·105s�1 ·1,86 ·10�3m = 1488m/s.
Dies ist in guter Übereinstimmung mit dem Litera-turwert von 1480 m/s bei 20�C.
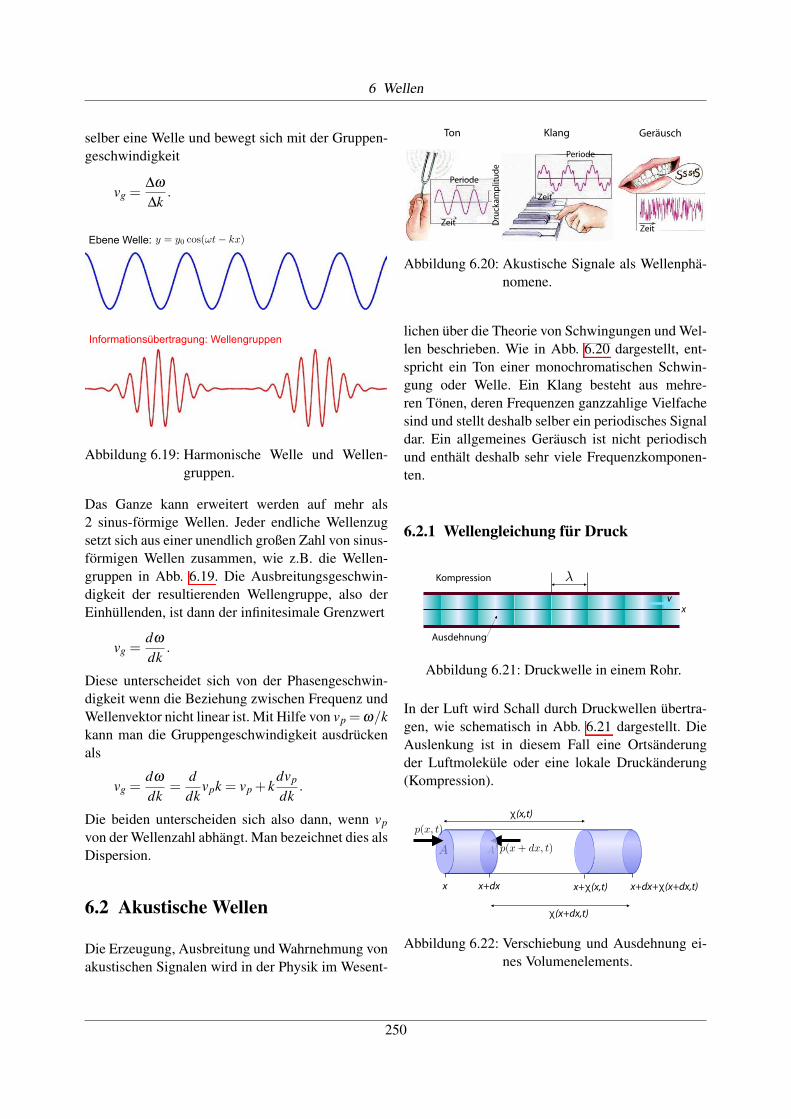
6.1.9 Überlagerung von Wellen;Gruppengeschwindigkeit
In linearen Systemen können Wellen sich beliebigüberlagern. Dabei entstehen auch interessante neuePhänomene.
1Raum / Zeit
Abbildung 6.18: Überlagerung von 2 harmonischenWellen und resultierende Schwe-bung.
Als einfaches Beispiel kann man die Überlagerungvon zwei harmonischen Wellen betrachten, wie inAbb. 6.18 gezeigt. Die resultierende Auslenkung istdie Summe
y = y0 cos(w1t � k1x)+ y0 cos(w2t � k2x).
Mit Hilfe der Additionstheoreme für harmonischeFunktionen kann die Summe geschrieben werden als
y = 2y0 cos(w1 +w2
2t � k1 + k2
2x) ·
·cos(w1 �w2
2t � k1 � k2
2x).
Dies entspricht einer Welle mit durchschnittlicherFrequenz w = (w1 + w2)/2 und Wellenvektor k =(k1 + k2)/2, welche mit einer Einhüllenden modu-liert ist Diese Einhüllende hat selber eine FrequenzDw = (w1 � w2)/2 und Wellenvektor Dk = (k1 �k2)/2:
y = 2y0 cos(wt � kx)cos(Dwt �Dkx).
An einer gegebenen Stelle entspricht dies einerSchwebung einer Schwingung. Die Einhüllende ist
249
6 Wellen
selber eine Welle und bewegt sich mit der Gruppen-geschwindigkeit
vg =DwDk
.
1
Informationsübertragung: Wellengruppen
y = y0 cos(�t � kx)<latexit sha1_base64="pQcabVnnqHSdP5K1LMopQicZxDE=">AAACA3icbVDLSsNAFJ3UV62vqDvdDBahLiyJCLoRim5cVrAPaEKYTKft0JlMmJmIIRTc+CtuXCji1p9w5984abPQ6oELh3Pu5d57wphRpR3nyyotLC4tr5RXK2vrG5tb9vZOW4lEYtLCggnZDZEijEakpalmpBtLgnjISCccX+V+545IRUV0q9OY+BwNIzqgGGkjBfZeepEGmTPxsFA1T3AyRFAfj+H9USWwq07dmQL+JW5BqqBAM7A/vb7ACSeRxgwp1XOdWPsZkppiRiYVL1EkRniMhqRnaIQ4UX42/WECD43ShwMhTUUaTtWfExniSqU8NJ0c6ZGa93LxP6+X6MG5n9EoTjSJ8GzRIGFQC5gHAvtUEqxZagjCkppbIR4hibA2seUhuPMv/yXtk7rr1N2b02rjsoijDPbBAagBF5yBBrgGTdACGDyAJ/ACXq1H69l6s95nrSWrmNkFv2B9fAMsV5aK</latexit><latexit sha1_base64="pQcabVnnqHSdP5K1LMopQicZxDE=">AAACA3icbVDLSsNAFJ3UV62vqDvdDBahLiyJCLoRim5cVrAPaEKYTKft0JlMmJmIIRTc+CtuXCji1p9w5984abPQ6oELh3Pu5d57wphRpR3nyyotLC4tr5RXK2vrG5tb9vZOW4lEYtLCggnZDZEijEakpalmpBtLgnjISCccX+V+545IRUV0q9OY+BwNIzqgGGkjBfZeepEGmTPxsFA1T3AyRFAfj+H9USWwq07dmQL+JW5BqqBAM7A/vb7ACSeRxgwp1XOdWPsZkppiRiYVL1EkRniMhqRnaIQ4UX42/WECD43ShwMhTUUaTtWfExniSqU8NJ0c6ZGa93LxP6+X6MG5n9EoTjSJ8GzRIGFQC5gHAvtUEqxZagjCkppbIR4hibA2seUhuPMv/yXtk7rr1N2b02rjsoijDPbBAagBF5yBBrgGTdACGDyAJ/ACXq1H69l6s95nrSWrmNkFv2B9fAMsV5aK</latexit><latexit sha1_base64="pQcabVnnqHSdP5K1LMopQicZxDE=">AAACA3icbVDLSsNAFJ3UV62vqDvdDBahLiyJCLoRim5cVrAPaEKYTKft0JlMmJmIIRTc+CtuXCji1p9w5984abPQ6oELh3Pu5d57wphRpR3nyyotLC4tr5RXK2vrG5tb9vZOW4lEYtLCggnZDZEijEakpalmpBtLgnjISCccX+V+545IRUV0q9OY+BwNIzqgGGkjBfZeepEGmTPxsFA1T3AyRFAfj+H9USWwq07dmQL+JW5BqqBAM7A/vb7ACSeRxgwp1XOdWPsZkppiRiYVL1EkRniMhqRnaIQ4UX42/WECD43ShwMhTUUaTtWfExniSqU8NJ0c6ZGa93LxP6+X6MG5n9EoTjSJ8GzRIGFQC5gHAvtUEqxZagjCkppbIR4hibA2seUhuPMv/yXtk7rr1N2b02rjsoijDPbBAagBF5yBBrgGTdACGDyAJ/ACXq1H69l6s95nrSWrmNkFv2B9fAMsV5aK</latexit><latexit sha1_base64="pQcabVnnqHSdP5K1LMopQicZxDE=">AAACA3icbVDLSsNAFJ3UV62vqDvdDBahLiyJCLoRim5cVrAPaEKYTKft0JlMmJmIIRTc+CtuXCji1p9w5984abPQ6oELh3Pu5d57wphRpR3nyyotLC4tr5RXK2vrG5tb9vZOW4lEYtLCggnZDZEijEakpalmpBtLgnjISCccX+V+545IRUV0q9OY+BwNIzqgGGkjBfZeepEGmTPxsFA1T3AyRFAfj+H9USWwq07dmQL+JW5BqqBAM7A/vb7ACSeRxgwp1XOdWPsZkppiRiYVL1EkRniMhqRnaIQ4UX42/WECD43ShwMhTUUaTtWfExniSqU8NJ0c6ZGa93LxP6+X6MG5n9EoTjSJ8GzRIGFQC5gHAvtUEqxZagjCkppbIR4hibA2seUhuPMv/yXtk7rr1N2b02rjsoijDPbBAagBF5yBBrgGTdACGDyAJ/ACXq1H69l6s95nrSWrmNkFv2B9fAMsV5aK</latexit>
Ebene Welle:
Abbildung 6.19: Harmonische Welle und Wellen-gruppen.
Das Ganze kann erweitert werden auf mehr als2 sinus-förmige Wellen. Jeder endliche Wellenzugsetzt sich aus einer unendlich großen Zahl von sinus-förmigen Wellen zusammen, wie z.B. die Wellen-gruppen in Abb. 6.19. Die Ausbreitungsgeschwin-digkeit der resultierenden Wellengruppe, also derEinhüllenden, ist dann der infinitesimale Grenzwert
vg =dwdk
.
Diese unterscheidet sich von der Phasengeschwin-digkeit wenn die Beziehung zwischen Frequenz undWellenvektor nicht linear ist. Mit Hilfe von vp = w/kkann man die Gruppengeschwindigkeit ausdrückenals
vg =dwdk
=ddk
vpk = vp + kdvp
dk.
Die beiden unterscheiden sich also dann, wenn vpvon der Wellenzahl abhängt. Man bezeichnet dies alsDispersion.
6.2 Akustische Wellen
Die Erzeugung, Ausbreitung und Wahrnehmung vonakustischen Signalen wird in der Physik im Wesent-
Periode
Zeit
Ton Klang Geräusch
Periode
Zeit Druckam
plitu
de
Zeit
Abbildung 6.20: Akustische Signale als Wellenphä-nomene.
lichen über die Theorie von Schwingungen und Wel-len beschrieben. Wie in Abb. 6.20 dargestellt, ent-spricht ein Ton einer monochromatischen Schwin-gung oder Welle. Ein Klang besteht aus mehre-ren Tönen, deren Frequenzen ganzzahlige Vielfachesind und stellt deshalb selber ein periodisches Signaldar. Ein allgemeines Geräusch ist nicht periodischund enthält deshalb sehr viele Frequenzkomponen-ten.
6.2.1 Wellengleichung für Druck
Kompression
Ausdehnung
xv
Abbildung 6.21: Druckwelle in einem Rohr.
In der Luft wird Schall durch Druckwellen übertra-gen, wie schematisch in Abb. 6.21 dargestellt. DieAuslenkung ist in diesem Fall eine Ortsänderungder Luftmoleküle oder eine lokale Druckänderung(Kompression).
p(x + dx, t)
χ(x,t)
χ(x+dx,t)
A�A
x+dxx x+χ(x,t) x+dx+χ(x+dx,t)
p(x, t)
Abbildung 6.22: Verschiebung und Ausdehnung ei-nes Volumenelements.
250

6 Wellen
Als Modell verwenden wir ein Rohr, in dem sich ei-ne harmonische Welle ausbreitet, wie in Abb. 6.22gezeigt. Die Wände des Rohrs haben dabei keine Be-deutung und tauchen in der Lösung nicht auf. Fürdie Herleitung der Wellengleichung betrachten wirdie Kraft auf ein Volumenelement DV = Adx, wo-bei A die Querschnittsfläche des Rohrs darstellt. DasWegelement dx soll klein sein im Vergleich zur Wel-lenlänge. Die Kraft auf das Volumenelement kannals Differenz der Normalkräfte auf beiden Seiten be-rechnet werden:
F = A[p(x)� p(x+dx)] = �Ad pdx
dx.
Die Druckänderung d p ist über den Kompressions-modul K an eine Volumenänderung dV gekoppelt:
d p = �KdVDV
.
Wir stellen die Auslenkung als eine Verschiebungc(x, t) einer (imaginären) Trennwand zwischen be-nachbarten Volumenelementen dar. Damit kann dieVolumenänderung dargestellt werden als Unter-schied in der Verschiebung
dV = A(c(x+dx)–c(x)) = Adcdx
dx.
Mit DV = Adx erhalten wir für die Druckänderung
d p = �KAdxAdx
dcdx
= �Kdcdx
und für die Kraft
F = AKd2cdx2 dx.
Damit erhalten wir eine Bewegungsgleichung für dieAuslenkung c des Massenelementes rDV :
rAdx∂ 2c∂ t2 = �A
∂ p∂x
dx = AK∂ 2c∂x2 dx.
Division durch rAdx ergibt die Wellengleichung
∂ 2c∂ t2 =
Kr
∂ 2c∂x2 .
6.2.2 Schallwellen
Die Schallgeschwindigkeit, d.h. die Geschwindig-keit einer Schallwelle ist somit eine Konstante fürein gegebenes Medium, unabhängig von der Fre-quenz und Wellenlänge. Sie beträgt
vS =
sKr
. (6.6)
Sie hängt jedoch stark vom Material ab. Ein ho-her Kompressionsmodul (d.h. niedrige Kompressibi-lität) erhöht die Schallgeschwindigkeit, da eine Stö-rung sich stark auf ein benachbartes Volumenele-ment auswirkt. Eine geringe Dichte erhöht eben-falls die Schallgeschwindigkeit, da die Volumenele-mente rascher beschleunigt werden. Dies kann manz.B. beim Vergleich unterschiedlicher Gase sehen:Je leichter das Molekulargewicht, desto größer dieSchallgeschwindigkeit.
Eine analoge Gleichung kann man für die Änderun-gen des Druckes herleiten:
p(x, t) = p0 +Dp(x, t) ,
An die Druckänderung ist auch eine Dichteänderunggekoppelt; die beiden sind in guter Näherung pro-portional zueinander:
∂ p∂r
����r0
= a =1
r0k.
Hier ist
k = � 1V
dVd p
die (adiabatische) Kompressibilität. Damit gilt fürkleine Verschiebungen und Dichteschwankungen
p(x, t) = p0 +Dp(x, t) = p0 +a ·Dr(x, t) . (6.7)
Die einfachsten Lösungen einer Wellengleichungsind ebene Wellen. In diesem Fall entspricht das
c(x, t) = c0 sin(wt �kx), vS = vP =wk
. (6.8)
Hier stellen w die (Kreis-)Frequenz, k die Wellen-zahl und vP die Phasengeschwindigkeit dar.
251
6 Wellen
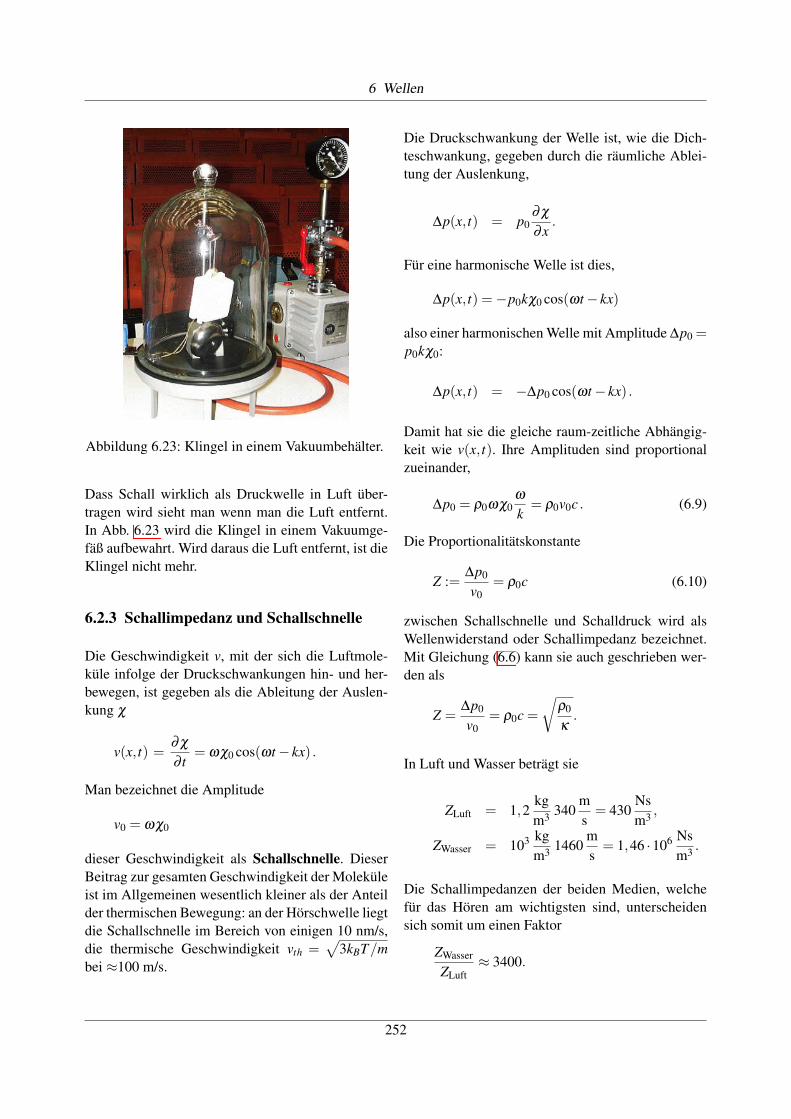
Abbildung 6.23: Klingel in einem Vakuumbehälter.
Dass Schall wirklich als Druckwelle in Luft über-tragen wird sieht man wenn man die Luft entfernt.In Abb. 6.23 wird die Klingel in einem Vakuumge-fäß aufbewahrt. Wird daraus die Luft entfernt, ist dieKlingel nicht mehr.
6.2.3 Schallimpedanz und Schallschnelle
Die Geschwindigkeit v, mit der sich die Luftmole-küle infolge der Druckschwankungen hin- und her-bewegen, ist gegeben als die Ableitung der Auslen-kung c
v(x, t) =∂ c∂ t
= wc0 cos(wt � kx) .
Man bezeichnet die Amplitude
v0 = wc0
dieser Geschwindigkeit als Schallschnelle. DieserBeitrag zur gesamten Geschwindigkeit der Moleküleist im Allgemeinen wesentlich kleiner als der Anteilder thermischen Bewegung: an der Hörschwelle liegtdie Schallschnelle im Bereich von einigen 10 nm/s,die thermische Geschwindigkeit vth =
p3kBT/m
bei ⇡100 m/s.
Die Druckschwankung der Welle ist, wie die Dich-teschwankung, gegeben durch die räumliche Ablei-tung der Auslenkung,
Dp(x, t) = p0∂ c∂x
.
Für eine harmonische Welle ist dies,
Dp(x, t) = �p0kc0 cos(wt � kx)
also einer harmonischen Welle mit Amplitude Dp0 =p0kc0:
Dp(x, t) = �Dp0 cos(wt � kx) .
Damit hat sie die gleiche raum-zeitliche Abhängig-keit wie v(x, t). Ihre Amplituden sind proportionalzueinander,
Dp0 = r0wc0wk
= r0v0c . (6.9)
Die Proportionalitätskonstante
Z :=Dp0
v0= r0c (6.10)
zwischen Schallschnelle und Schalldruck wird alsWellenwiderstand oder Schallimpedanz bezeichnet.Mit Gleichung (6.6) kann sie auch geschrieben wer-den als
Z =Dp0
v0= r0c =
rr0
k.
In Luft und Wasser beträgt sie
ZLuft = 1,2kgm3 340
ms
= 430Nsm3 ,
ZWasser = 103 kgm3 1460
ms
= 1,46 ·106 Nsm3 .
Die Schallimpedanzen der beiden Medien, welchefür das Hören am wichtigsten sind, unterscheidensich somit um einen Faktor
ZWasser
ZLuft⇡ 3400.
252

6 Wellen
6.2.4 Intensität und Lautstärke
Die Energiedichte einer Schallwelle ist gegebendurch die Summe aus kinetischer und Druckenergie,
w = wkin +welast .
Die kinetische Energiedichte ist
wkin =rv2
2.
Für die Herleitung der elastischen Energie verwen-det man die Definition des Kompressionsmoduls
d p = �KdVDV
.
Hier ist d p die Druckänderung durch die Schallwelleund DV das betrachtete Volumen. Damit ist die Än-derung der elastischen Energie des Volumens DV beieiner Erhöhung des Drucks
dwelast =dEp
DV= � pdV
DV=
1K
pd p.
Integration ergibt die elastische Energie pro Volu-men
welast =12
1K
p2.
Für eine Schallwelle wird dies
welast =12
1K
r2c20
w4
k2 sin2(wt � kx).
Mit
w2
k2 = v2p =
Kr
kann dies geschrieben werden als
welast =12
rc20 w2 sin2(wt � kx).
Ein Vergleich mit der kinetischen Energiedichte
wkin =12
rc20 w2 sin2(wt � kx)
zeigt, dass sie identisch sind,
welast = wkin.
Somit ist die gesamte Energiedichte
w = wkin +welast = rc20 w2 sin2(wt � kx).
Die Energie ist somit sinusförmig entlang der Wel-le verteilt, wobei die Periode der halben Wellenlän-ge entspricht. Die Energiedichte einer mechanischenWelle ist proportional zum Quadrat der maximalenGeschwindigkeit c0w der Elemente. Gemittelt übereine Periode erhält man
w =r2
c20 w2.
Daraus ergibt sich die Intensität als Produkt ausEnergiedichte und Ausbreitungsgeschwindigkeit,
I = vSw = vSr2
c20 w2.
Mit Hilfe der Gleichungen (6.9) und (6.10) kann diesauch geschrieben werden als
I =DEADt
= vSw =12
Dp20
r0c=
12
Dp20
Z.
Der Schalldruck (die Amplitude Dp0) und die Fre-quenz der Schallschwingung entscheiden, ob undwie laut wir einen Ton wahrnehmen. Der Frequenz-bereich des menschlichen Gehörs reicht von etwa16 Hz bis rund 20 kHz, wobei die Grenzen nichtscharf sind und individuell variieren. Schwingungenmit großem Schalldruck bewirken Hörempfindungengrößerer Lautstärke als Schwingungen mit geringemSchalldruck. Von dem leisesten noch wahrnehmba-ren 2 kHz-Ton bis zur Schmerzgrenze erstreckt sichder Bereich von 20 µPa bis zu 20 Pa (Effektivwerte).
An der Hörschwelle (20 µPa) beträgt die Intensität
I0 =12
(2 ·10�5)2
430Wm2 ⇡ 10�12 W
m2 .
An der Schmerzschwelle sind es etwa 12 Größenord-nungen mehr, also Imax ⇡ 1 W/m2. Aus Gleichung(6.9) erhält man die Schallschnelle an der Hörgrenzezu
v0 =Dp0
r0c=
2 ·10�5
1,2 ·340ms
⇡ 5 ·10�8 ms
.
Bei einer Frequenz von 1 kHz entspricht dies einerAuslenkung von
c0 =v0
w⇡ 10�11m,
also weniger als einem Atomdurchmesser (siehe6.2.6).
253
6 Wellen
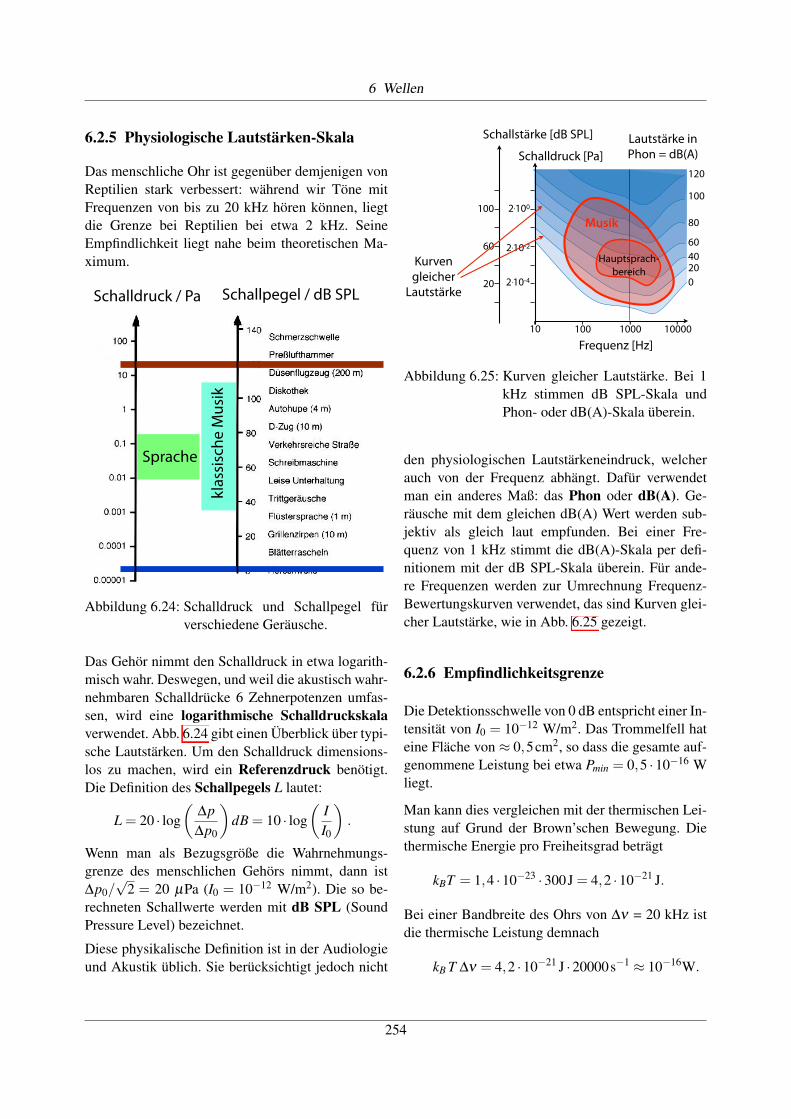
6.2.5 Physiologische Lautstärken-Skala
Das menschliche Ohr ist gegenüber demjenigen vonReptilien stark verbessert: während wir Töne mitFrequenzen von bis zu 20 kHz hören können, liegtdie Grenze bei Reptilien bei etwa 2 kHz. SeineEmpfindlichkeit liegt nahe beim theoretischen Ma-ximum.
Schalldruck / Pa Schallpegel / dB SPL
Sprache
klas
sisch
e M
usik
Abbildung 6.24: Schalldruck und Schallpegel fürverschiedene Geräusche.
Das Gehör nimmt den Schalldruck in etwa logarith-misch wahr. Deswegen, und weil die akustisch wahr-nehmbaren Schalldrücke 6 Zehnerpotenzen umfas-sen, wird eine logarithmische Schalldruckskalaverwendet. Abb. 6.24 gibt einen Überblick über typi-sche Lautstärken. Um den Schalldruck dimensions-los zu machen, wird ein Referenzdruck benötigt.Die Definition des Schallpegels L lautet:
L = 20 · log✓
DpDp0
◆dB = 10 · log
✓II0
◆.
Wenn man als Bezugsgröße die Wahrnehmungs-grenze des menschlichen Gehörs nimmt, dann istDp0/
p2 = 20 µPa (I0 = 10�12 W/m2). Die so be-
rechneten Schallwerte werden mit dB SPL (SoundPressure Level) bezeichnet.
Diese physikalische Definition ist in der Audiologieund Akustik üblich. Sie berücksichtigt jedoch nicht
Musik
Frequenz [Hz]10 100 1000 10000
Lautstärke in Phon = dB(A)
2.100
2.10-2
2.10-4
Schallstärke [dB SPL]
Schalldruck [Pa]
100
60
20
Kurven gleicher
Lautstärke
Hauptsprach-bereich
120
100
80
6040200
Abbildung 6.25: Kurven gleicher Lautstärke. Bei 1kHz stimmen dB SPL-Skala undPhon- oder dB(A)-Skala überein.
den physiologischen Lautstärkeneindruck, welcherauch von der Frequenz abhängt. Dafür verwendetman ein anderes Maß: das Phon oder dB(A). Ge-räusche mit dem gleichen dB(A) Wert werden sub-jektiv als gleich laut empfunden. Bei einer Fre-quenz von 1 kHz stimmt die dB(A)-Skala per defi-nitionem mit der dB SPL-Skala überein. Für ande-re Frequenzen werden zur Umrechnung Frequenz-Bewertungskurven verwendet, das sind Kurven glei-cher Lautstärke, wie in Abb. 6.25 gezeigt.
6.2.6 Empfindlichkeitsgrenze
Die Detektionsschwelle von 0 dB entspricht einer In-tensität von I0 = 10�12 W/m2. Das Trommelfell hateine Fläche von ⇡ 0,5cm2, so dass die gesamte auf-genommene Leistung bei etwa Pmin = 0,5 ·10�16 Wliegt.
Man kann dies vergleichen mit der thermischen Lei-stung auf Grund der Brown’schen Bewegung. Diethermische Energie pro Freiheitsgrad beträgt
kBT = 1,4 ·10�23 ·300J = 4,2 ·10�21 J.
Bei einer Bandbreite des Ohrs von Dn = 20 kHz istdie thermische Leistung demnach
kB T Dn = 4,2 ·10�21 J ·20000s�1 ⇡ 10�16W.
254

6 Wellen
Die aufgenommene Leistung einer Schallwelle ander Hörgrenze entspricht somit in etwa der thermi-schen Leistung. Somit arbeitet das menschliche Ohrnahe bei der physikalischen Grenze für die Empfind-lichkeit.
Außerdem kann man die entsprechende Auslenkungberechnen, aus der Beziehung zwischen Schall-schnelle v0 und Druckamplitude Dp0:
v0 = w c0 =Dp0
Z=
Dp0
r0 c.
Auflösen nach der Auslenkungsamplitude c0 gibt
c0 =Dp0
w r0 c.
Für eine Schallwelle an der Hörgrenze, d.h. mit Dp0= 20 µPa und einer Frequenz von 1 kHz erhält man
c0 =2 ·10�5
2p103 ·1,2 ·300m ⇡ 2 ·10�5
2 ·106 m
= 10�11m = 10pm.
Die Auslenkung an der Detektionsschwelle ist alsoweniger als ein Atomdurchmesser.
6.3 Mechanische Wellen
6.3.1 Druckwellen in Flüssigkeiten undFestkörpern
Druckwellen findet man nicht nur in Gasen sondernauch in Flüssigkeiten und Festkörpern. Ein forma-ler Unterschied zwischen kondensierten Materialienund Gasen ist, dass hier die Beziehung zwischen Vo-lumenänderung und Normalspannung über den Ela-stizitätsmodul E definiert ist:
s = �Edcdx
.
Damit wird die Wellengleichung
d2cdt2 =
Er
d2cdx2 .
Abbildung 6.26: Federmodell eines Festkörpers.
und die Schallgeschwindigkeit
vS =
sEr
.
Festkörper unterscheiden sich von Flüssigkeiten undGasen im Wesentlichen durch ihr Formgedächtnis.Dies bedeutet, dass hier auch eine Scherspannungexistieren kann, also eine rücktreibende Kraft par-allel zu einer Ebene. Abb. 6.26 zeigt ein Federmo-dell eines Festkörpers, welcher die unterschiedlichenrücktreibenden Kräfte plausibel macht: bei einer la-teralen Auslenkung eines Volumenelements wirkt ei-ne rücktreibende Kraft und eine Kopplung an das be-nachbarte Volumenelement. Solche Störungen brei-ten sich als Transversalwellen aus; ihre Phasenge-schwindigkeit ist gegeben durch das Verhältnis vonSchubmodul G zu Dichte,
vp =
sGr
.
Wie in Abb. 6.27 gezeigt, ist der ElastizitätsmodulE immer größer ist als das Schermodul G. Dement-sprechend haben longitudinale Druckwellen eine hö-here Ausbreitungsgeschwindigkeit als für transver-sale Scherwellen.
Die Phasengeschwindigkeit in einem Material ist so-mit um so höher je starrer das Material und je gerin-ger die Dichte ist. Am größten sollte die Ausbrei-tungsgeschwindigkeit somit in steifen, leichten Ma-terialien sein. Umgekehrt können wir die Messungder Schallgeschwindigkeit als eine direkte Messungder Kompressibilität, resp. des Kompressionsmodulsbetrachten.
255
6 Wellen
1
l α
∆x
Elastizitätsmodul SchubmodulMaterial E / GPa G/GPa
Eis 9.1 3.9Granit 55 30
Al 71 26Stahl 206 80.4
Diamant 1100 478
1
Abbildung 6.27: Elastische Konstanten in unter-schiedlichen Materialien.
Dichte [kg/m3] vs [m/s]Luft 1.2 344CO2 1.98 266Wasserstoff 0.09 1260Wasserdampf 0.54 450Wasser 1000 1400Eis 920 3200Stahl 7700 5050Glas 2500 5300Diamant 3520 18000
Tabelle 6.1: Schallgeschwindigkeiten in unter-schiedlichen Stoffen.
Tabelle 6.1 vergleicht die Dichte und die Schallge-schwindigkeit für unterschiedliche Stoffe. Bei Ga-sen findet man Schallgeschwindigkeiten im Bereich300-450 m/s, außer bei Wasserstoff, der eine sehr ge-ringe Dichte aufweist. In Flüssigkeiten ist die Schall-geschwindigkeit um 1500 m/s. Dies ist bemerkens-wert, da sowohl die Dichte, wie auch die Kompri-mierbarkeit sich um rund drei Größenordnungen un-terscheiden. Da jedoch nur das Verhältnis eingeht,kompensieren sie sich. Bei Festkörpern ist die Dich-te etwas höher als in Flüssigkeiten, aber die Steifig-keit sehr viel höher. Darum werden hier die Schall-geschwindigkeiten maximal. Der Extremwert wirderreicht in Diamant, das für einen Festkörper relativleicht ist, gleichzeitig ist es eines der härtesten Ma-terialien überhaupt.
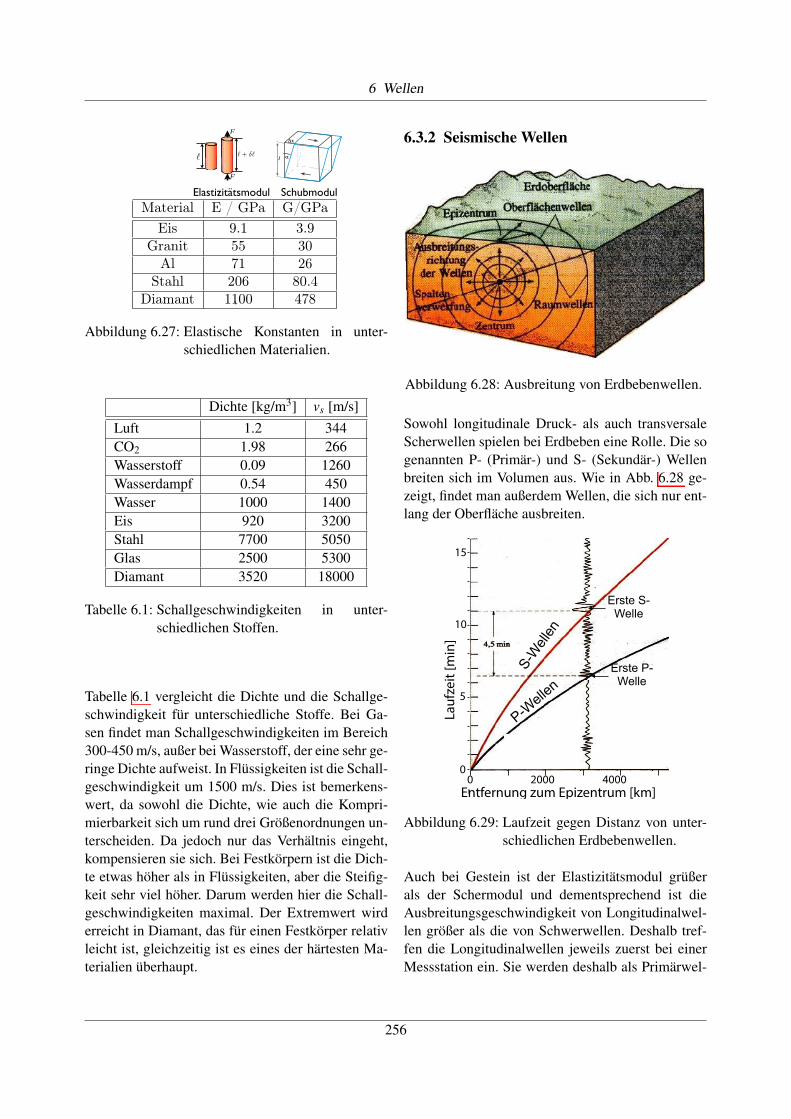
6.3.2 Seismische Wellen
Abbildung 6.28: Ausbreitung von Erdbebenwellen.
Sowohl longitudinale Druck- als auch transversaleScherwellen spielen bei Erdbeben eine Rolle. Die sogenannten P- (Primär-) und S- (Sekundär-) Wellenbreiten sich im Volumen aus. Wie in Abb. 6.28 ge-zeigt, findet man außerdem Wellen, die sich nur ent-lang der Oberfläche ausbreiten.
1
0
5
10
15
Entfernung zum Epizentrum [km]0 2000 4000
Lauf
zeit
[min
]
Erste S-Welle
Erste P-Welle
S-W
ellen
P-Wellen
Abbildung 6.29: Laufzeit gegen Distanz von unter-schiedlichen Erdbebenwellen.
Auch bei Gestein ist der Elastizitätsmodul grüßerals der Schermodul und dementsprechend ist dieAusbreitungsgeschwindigkeit von Longitudinalwel-len größer als die von Schwerwellen. Deshalb tref-fen die Longitudinalwellen jeweils zuerst bei einerMessstation ein. Sie werden deshalb als Primärwel-
256
6 Wellen
len bezeichnet, während die später eintreffenden Se-kundärwellen Scherwellen sind. Abb. 6.29 zeigt dieLaufzeiten dieser Wellentypen als Funktion der Ent-fernung. Die Zerstörungskraft von S-Wellen ist grö-ßer als die von P-Wellen. Die P-Wellen können des-halb als (kurzzeitige) Vorwarnung vor den S-Wellengenutzt werden.
Neben den P- und S-Wellen gibt es auch Torsions-wellen, welche sich an der Oberfläche ausbreitenund als Love-Wellen bezeichnet werden. Rayleigh-Wellen sind ebenfalls Oberflächenwellen, sie glei-chen aber Meereswellen.
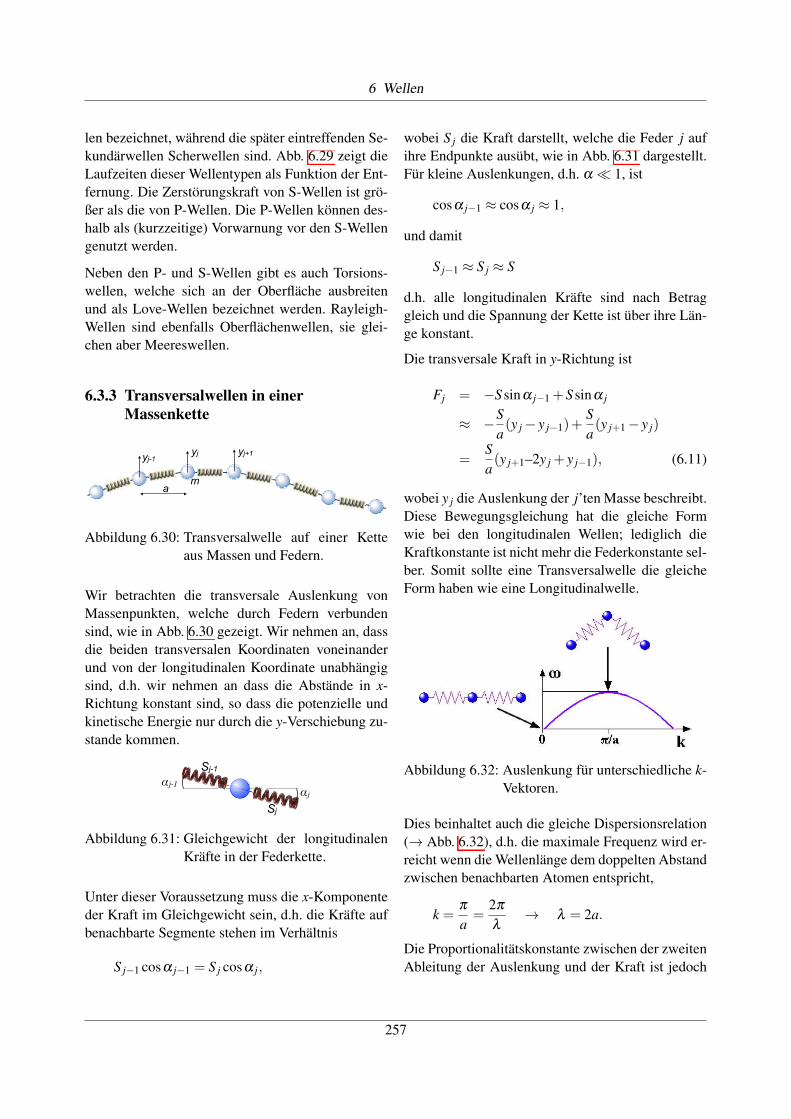
6.3.3 Transversalwellen in einerMassenkette
yj-1 yj yj+1
am
Abbildung 6.30: Transversalwelle auf einer Ketteaus Massen und Federn.
Wir betrachten die transversale Auslenkung vonMassenpunkten, welche durch Federn verbundensind, wie in Abb. 6.30 gezeigt. Wir nehmen an, dassdie beiden transversalen Koordinaten voneinanderund von der longitudinalen Koordinate unabhängigsind, d.h. wir nehmen an dass die Abstände in x-Richtung konstant sind, so dass die potenzielle undkinetische Energie nur durch die y-Verschiebung zu-stande kommen.
αjαj-1
Sj
Sj-1
Abbildung 6.31: Gleichgewicht der longitudinalenKräfte in der Federkette.
Unter dieser Voraussetzung muss die x-Komponenteder Kraft im Gleichgewicht sein, d.h. die Kräfte aufbenachbarte Segmente stehen im Verhältnis
S j�1 cosa j�1 = S j cosa j,
wobei S j die Kraft darstellt, welche die Feder j aufihre Endpunkte ausübt, wie in Abb. 6.31 dargestellt.Für kleine Auslenkungen, d.h. a ⌧ 1, ist
cosa j�1 ⇡ cosa j ⇡ 1,
und damit
S j�1 ⇡ S j ⇡ S
d.h. alle longitudinalen Kräfte sind nach Betraggleich und die Spannung der Kette ist über ihre Län-ge konstant.
Die transversale Kraft in y-Richtung ist
Fj = �S sina j�1 +S sina j
⇡ �Sa(y j � y j�1)+
Sa(y j+1 � y j)
=Sa(y j+1–2y j + y j�1), (6.11)
wobei y j die Auslenkung der j’ten Masse beschreibt.Diese Bewegungsgleichung hat die gleiche Formwie bei den longitudinalen Wellen; lediglich dieKraftkonstante ist nicht mehr die Federkonstante sel-ber. Somit sollte eine Transversalwelle die gleicheForm haben wie eine Longitudinalwelle.
Abbildung 6.32: Auslenkung für unterschiedliche k-Vektoren.
Dies beinhaltet auch die gleiche Dispersionsrelation(! Abb. 6.32), d.h. die maximale Frequenz wird er-reicht wenn die Wellenlänge dem doppelten Abstandzwischen benachbarten Atomen entspricht,
k =pa
=2pl
! l = 2a.
Die Proportionalitätskonstante zwischen der zweitenAbleitung der Auslenkung und der Kraft ist jedoch
257

6 Wellen
nicht die Federkonstante c, sondern der Quotient S/aaus Federkraft und Abstand. Damit wird die Pha-sengeschwindigkeit einer Transversalwelle abhängigvon der Spannung der Kette,
w = 2r
Sam
����sinka2
���� .
6.3.4 Energie einer Transversalwelle
Ähnlich wie Longitudinalwellen transportieren auchTransversalwellen Energie. Für ihre Berechnung be-trachten wir als Modell zunächst eine lokalisierteAuslenkung, die sich nach rechts bewegt. Offen-bar ist in diesem System die Masse an der Spitzedes Wellenberges diejenige mit der größten Ener-gie. Wenn die Welle sich bewegt, wird somit Energietransportiert. Für die Berechnung der Energieüber-tragung beginnen wir mit der Schwingungsenergieeines Elementes,
E = Ekin +Epot =12
my2 +12
cy2,
wobei c die Kraftkonstante bezeichnet. Für harmo-nische Wellen kann dies geschrieben werden als
E =m2
(y2 +cm
y2)
=m2
(y2 +w2y2)
=m2
w2y20(sin2 wt + cos2 wt)
=m2
w2y20.
Für kontinuierliche Systeme können wir diesen Aus-druck in differenzieller Form schreiben:
dE =r dV
2w2y2
0.
Die Energiedichte beträgt somit
w =dE
dV=
r2
w2y20,
wiederum proportional zum Quadrat der Amplitudeund zum Quadrat der Frequenz.
Mit der Ausbreitung der Welle wandern sowohl po-tenzielle wie auch kinetische Energie mit der Welle
mit. Die Intensität der Welle, also die Energie, wel-che pro Zeit und Flache transportiert wird, ist
I = wvP,
d.h. die Intensität ist gleich der Energiedichte malder Phasengeschwindigkeit. Da die Energiedichteproportional zum Quadrat der Auslenkung, also zurAmplitude der Welle ist, gilt offenbar I µ y2
0, d.h. dieIntensität einer Welle ist proportional zum Quadratihrer Amplitude.
Abbildung 6.33: Tsunami.
Ein extremes Beispiel von effizientem Energietrans-port durch eine Transversalwelle sind Tsunamis. Aufoffenem Meer wird die Energie, welche meist auseinem Erdbeben stammt, durch eine Oberflächen-welle mit langen Wellenlängen übertragen. Wenndiese Welle auf Land trifft, ändern sich jedoch dieRandbedingungen, wie in Abb. 6.33 dargestellt. Da-durch wird die Oberflächenwelle umgewandelt undes kommt auch zu Massetransport von Wasser insInland.
6.3.5 Seilwellen
Wenn wir den kontinuierlichen Grenzfall a ! 0 be-trachten, erhalten wir eine Saite oder ein Seil.
Eine seitliche Auslenkung eines gespannten Seilsoder einer Feder wird als Transversalwelle übertra-gen. Wie bei der Kette ist die Spannkraft des Seilskonstant über die Länge des Seils.
Für die Beschreibung von Seilwellen betrachten wirein Volumenelement zwischen den Positionen x undx+dx, wie den in Abb. 6.34 rot markierten Bereich.Hier beschreibt x die Koordinate entlang der Saite,y(x) die Auslenkung. An beiden Endflächen grei-fen Kräfte an, welche senkrecht auf die Endflächen
258

6 Wellen
Ort x
Aus
lenk
ung y
x x+dx
Abbildung 6.34: Kräfte auf ein Seilstück.
wirken. Ihre Richtung wird parametrisiert durch denWinkel
a(x) = tan�1 dydx
⇡ dydx
.
Die Näherung ist gültig für kleine Auslenkungen, wo
sina ⇡ tana ⇡ a ⇡ dydx
, cosa ⇡ 1.
Der Betrag der beiden Kräfte ist gegeben durch dieSaitenspannung und damit gleich,
|F(x)| = |F(x+dx)| = F.
Die y-Komponenten der Kräfte an beiden Enden desVolumenelementes addieren sich zu
dFy = Fy(x)+Fy(x+dx)= F [sina(x+dx)� sina(x)]
und damit
dFy = Fd sina
dxdx ⇡ F
d2ydx2 dx.
Dies ist die infinitesimale Form von Gleichung(6.11). Diese resultierende Kraft wirkt als Rückstell-kraft auf das Massenelement dm = rAdx, wobei rdie Dichte und A den Querschnitt der Saite darstel-len. Damit erhalten wir die Bewegungsgleichung
dma = rAdxd2ydt2 = F
d2ydx2 dx
oder
d2ydt2 =
FrA
d2ydx2 .
Dies ist die Differentialgleichung, welche die Aus-breitung der Welle auf einer gespannten Saite be-schreibt. Die Phasengeschwindigkeit beträgt somit
vp =
sF
rA, (6.12)
d.h. sie ist proportional zum Verhältnis von Span-nung des Seils zur Massendichte rA pro Längenein-heit. Dicke, schwach gespannte Seile oder Saiten er-geben somit niedrige Frequenzen, leichte, stark ge-spannte eine hohe Frequenz. Die Abhängigkeit vonder Spannung der Saite kann wieder leicht verstan-den werden da ohne Spannung keine rücktreibendeKraft existiert. Die Abhängigkeit von der Massen-dichte (pro Länge) ist die gleiche wie bei allen Artenvon Materiewellen, die wir bisher diskutiert hatten.
6.3.6 Wellen in 2D und 3D
Zweidimensionale Systeme wie Oberflächen undMembranen (z.B. Trommeln) zeigen eine Reihe voninteressanten Wellenphänomenen. Man findet hierebene Wellen, wie z.B. die Wellen, welche am Meerauf den Strand treffen, oder Kugelwellen, wenn einStein ins Wasser geworfen wird.
Bei Membranen werden die Lösungsfunktionen, al-so die entstehenden Wellen unter anderem durch dieRandbedingungen bestimmt. Stehwellen kann mansichtbar machen, z.B. indem man ein Pulver daraufstreut. Wir die Membran zu Schwingungen angeregt,sammelt sich das Pulver in den Knoten der Welle.
26.11.10 15:42 Physik 34 Versuch 029a
Page 2 of 9http://www.physik.uni-dortmund.de/index.php?view=article&catid=9…onent&print=1&layout=default&page=&option=com_content&Itemid=322
Frequenz: x 1: 0...100 kHz(Einstellung mit dem Feinstellpoti)NF-Verstärker: 9 – 12 Skt
Die Verstärkung muss je nach Mode geeignet eingestellt werden, da sonst zu viel Salzvon der Platte springt.
Den Salzstreuer mit Kochsalz füllen und die Metallplatte gleichmäßig bestreuen. Die Metallplatte formatfüllend mit der Videokamera aufnehmen. Die
Tafelstrahler einschalten und die Neonröhrenbeleuchtung über der Platte ausschalten, da sie sich in der Membran spiegelt.
Experiment: Schwingungsmoden von zentrisch eingespannten MetallplattenDie Erregerfrequenz wird von ca. 10 Hz ausgehend langsam erhöht, bis sich durchdie Bewegung der Salzkörner eine stabile Mode ankündigt.Mit dem Feinstellpoti wird die Mode genau eingestellt und gegebenenfalls dieAmplitude am Verstärker und die Frequenz nachreguliert. Besonders bei höheren Frequenzen ist eine Erhöhung von Amplitude undFrequenz erforderlich.
Die einzelnen Moden haben einen eng begrenzten Frequenzbereich, sodassdie Einstellung etwas schwierig ist, vor allem bei höheren Moden.Ihre Form ist nicht immer reproduzierbar. Es sind folgende Metallplatten vorhanden:
Abbildung 6.35: Beispiel einer Chladni’schenKlangfigur.
Die Knotenlinien können sichtbar gemacht werden,indem man die Membran mit einem Pulver bestreut.
259
6 Wellen
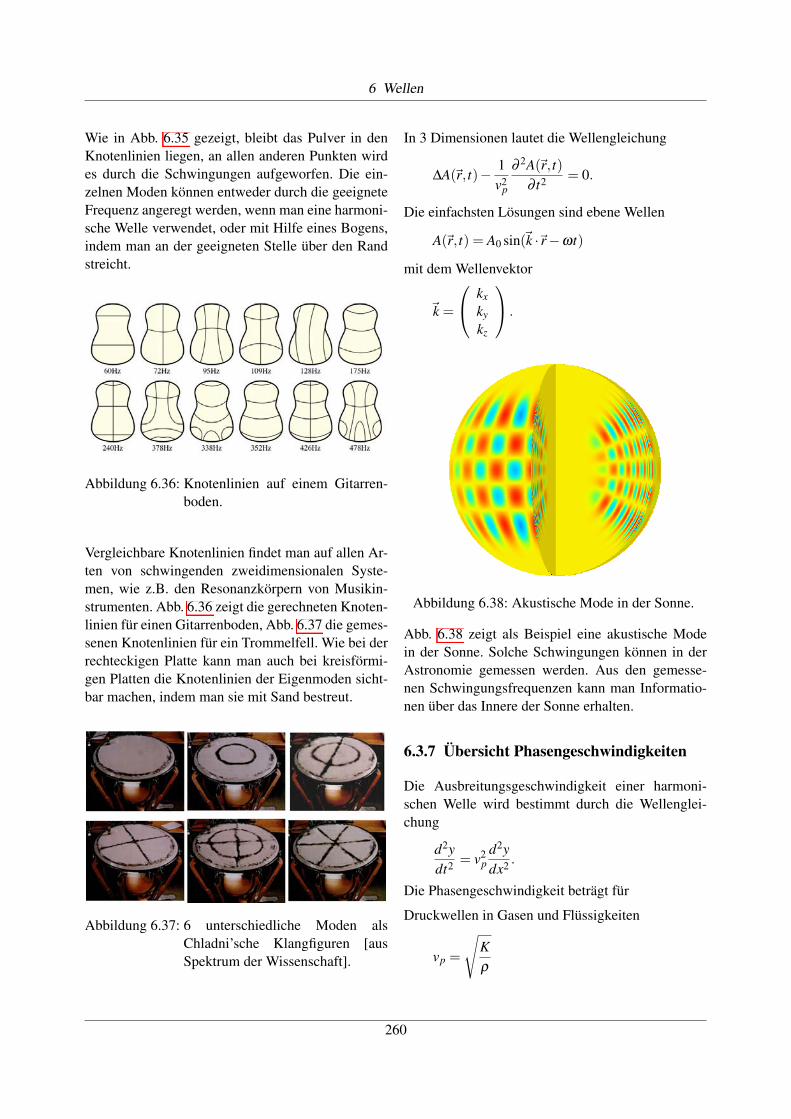
Wie in Abb. 6.35 gezeigt, bleibt das Pulver in denKnotenlinien liegen, an allen anderen Punkten wirdes durch die Schwingungen aufgeworfen. Die ein-zelnen Moden können entweder durch die geeigneteFrequenz angeregt werden, wenn man eine harmoni-sche Welle verwendet, oder mit Hilfe eines Bogens,indem man an der geeigneten Stelle über den Randstreicht.
Abbildung 6.36: Knotenlinien auf einem Gitarren-boden.
Vergleichbare Knotenlinien findet man auf allen Ar-ten von schwingenden zweidimensionalen Syste-men, wie z.B. den Resonanzkörpern von Musikin-strumenten. Abb. 6.36 zeigt die gerechneten Knoten-linien für einen Gitarrenboden, Abb. 6.37 die gemes-senen Knotenlinien für ein Trommelfell. Wie bei derrechteckigen Platte kann man auch bei kreisförmi-gen Platten die Knotenlinien der Eigenmoden sicht-bar machen, indem man sie mit Sand bestreut.
Abbildung 6.37: 6 unterschiedliche Moden alsChladni’sche Klangfiguren [ausSpektrum der Wissenschaft].
In 3 Dimensionen lautet die Wellengleichung
DA(~r, t)� 1v2
p
∂ 2A(~r, t)∂ t2 = 0.
Die einfachsten Lösungen sind ebene Wellen
A(~r, t) = A0 sin(~k ·~r �wt)
mit dem Wellenvektor
~k =
0
@kxkykz
1
A .
Abbildung 6.38: Akustische Mode in der Sonne.
Abb. 6.38 zeigt als Beispiel eine akustische Modein der Sonne. Solche Schwingungen können in derAstronomie gemessen werden. Aus den gemesse-nen Schwingungsfrequenzen kann man Informatio-nen über das Innere der Sonne erhalten.
6.3.7 Übersicht Phasengeschwindigkeiten
Die Ausbreitungsgeschwindigkeit einer harmoni-schen Welle wird bestimmt durch die Wellenglei-chung
d2ydt2 = v2
pd2ydx2 .
Die Phasengeschwindigkeit beträgt für
Druckwellen in Gasen und Flüssigkeiten
vp =
sKr
260
6 Wellen
mit K: Kompressionsmodul; r: Dichte.
Longitudinalwellen in Festkörpern
vp =
sEr
mit E: Elastizitätsmodul.
Torsionswellen in dünnen Rundstäben
vp =
sGr
mit G: Schubmodul.
Seilwellen
vp =
sF
rA
mit F Zugkraft, r Dichte und A Querschnitt desSeils.
6.4 Ausbreitung
6.4.1 Reflexion und Transmission
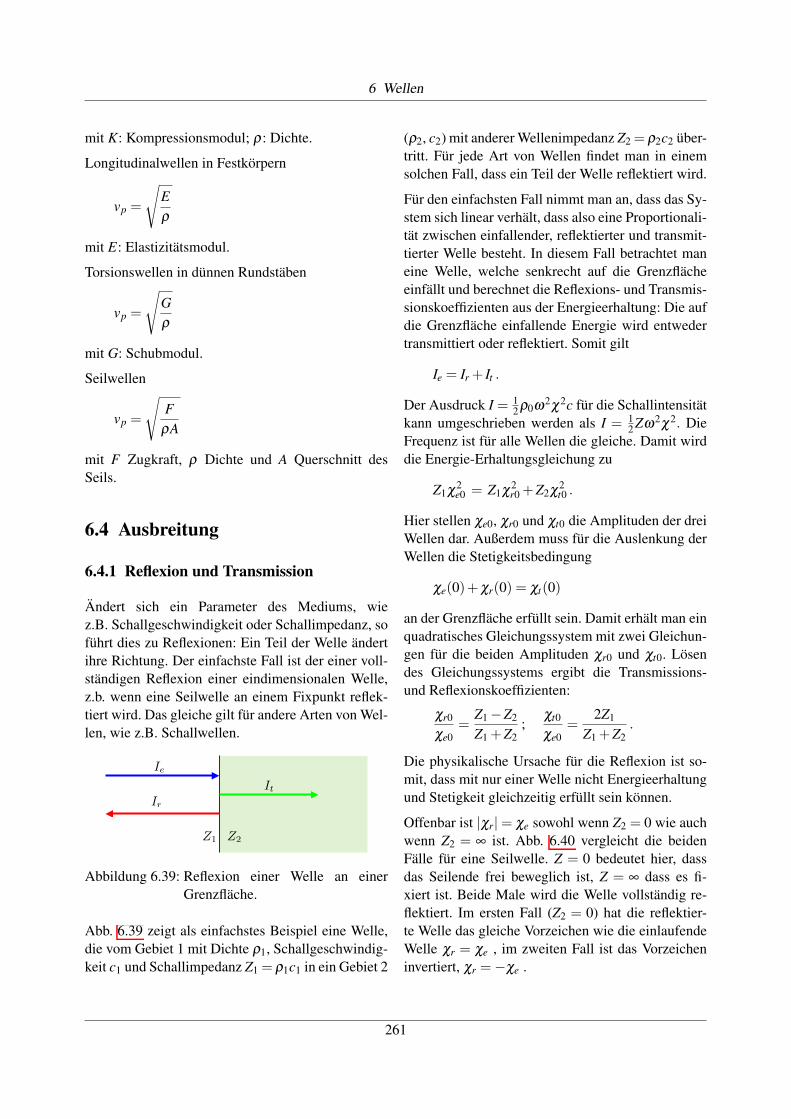
Ändert sich ein Parameter des Mediums, wiez.B. Schallgeschwindigkeit oder Schallimpedanz, soführt dies zu Reflexionen: Ein Teil der Welle ändertihre Richtung. Der einfachste Fall ist der einer voll-ständigen Reflexion einer eindimensionalen Welle,z.b. wenn eine Seilwelle an einem Fixpunkt reflek-tiert wird. Das gleiche gilt für andere Arten von Wel-len, wie z.B. Schallwellen.
It
Ie
Ir
Z1 Z2
Abbildung 6.39: Reflexion einer Welle an einerGrenzfläche.
Abb. 6.39 zeigt als einfachstes Beispiel eine Welle,die vom Gebiet 1 mit Dichte r1, Schallgeschwindig-keit c1 und Schallimpedanz Z1 = r1c1 in ein Gebiet 2
(r2, c2) mit anderer Wellenimpedanz Z2 = r2c2 über-tritt. Für jede Art von Wellen findet man in einemsolchen Fall, dass ein Teil der Welle reflektiert wird.
Für den einfachsten Fall nimmt man an, dass das Sy-stem sich linear verhält, dass also eine Proportionali-tät zwischen einfallender, reflektierter und transmit-tierter Welle besteht. In diesem Fall betrachtet maneine Welle, welche senkrecht auf die Grenzflächeeinfällt und berechnet die Reflexions- und Transmis-sionskoeffizienten aus der Energieerhaltung: Die aufdie Grenzfläche einfallende Energie wird entwedertransmittiert oder reflektiert. Somit gilt
Ie = Ir + It .
Der Ausdruck I = 12 r0w2c2c für die Schallintensität
kann umgeschrieben werden als I = 12 Zw2c2. Die
Frequenz ist für alle Wellen die gleiche. Damit wirddie Energie-Erhaltungsgleichung zu
Z1c2e0 = Z1c2
r0 +Z2c2t0 .
Hier stellen ce0, cr0 und ct0 die Amplituden der dreiWellen dar. Außerdem muss für die Auslenkung derWellen die Stetigkeitsbedingung
ce(0)+ cr(0) = ct(0)
an der Grenzfläche erfüllt sein. Damit erhält man einquadratisches Gleichungssystem mit zwei Gleichun-gen für die beiden Amplituden cr0 und ct0. Lösendes Gleichungssystems ergibt die Transmissions-und Reflexionskoeffizienten:
cr0
ce0=
Z1 �Z2
Z1 +Z2;
ct0
ce0=
2Z1
Z1 +Z2.
Die physikalische Ursache für die Reflexion ist so-mit, dass mit nur einer Welle nicht Energieerhaltungund Stetigkeit gleichzeitig erfüllt sein können.
Offenbar ist |cr| = ce sowohl wenn Z2 = 0 wie auchwenn Z2 = • ist. Abb. 6.40 vergleicht die beidenFälle für eine Seilwelle. Z = 0 bedeutet hier, dassdas Seilende frei beweglich ist, Z = • dass es fi-xiert ist. Beide Male wird die Welle vollständig re-flektiert. Im ersten Fall (Z2 = 0) hat die reflektier-te Welle das gleiche Vorzeichen wie die einlaufendeWelle cr = ce , im zweiten Fall ist das Vorzeicheninvertiert, cr = �ce .
261
6 Wellen
1
einlaufende Welle
reflektierte Welle Sei
l fre
i (Z 2
=0) :
kei
n P
hase
nspr
ung
Sei
l fes
t (Z 2
=∞) :
Pha
sens
prun
g
Abbildung 6.40: Reflexion einer Seilwelle bei losemoder fixem Ende.
Für die Intensitäten I µ c2 erhält man
ItIe
= 4Z1Z2
(Z1 +Z2)2 (6.13)
und
Ir
Ie=
(Z1 �Z2)2
(Z1 +Z2)2 .
Möchte man Reflexionen vermeiden, so muss offen-bar Z1 = Z2 sein, d.h. die Impedanzen der beidenMedien müssen gleich sein.
Eine interessante Konsequenz davon ergibt sich fürdas menschliche Ohr. Die Schallwelle, welche dasOhr erreicht, bewegt sich im Medium Luft. DessenSchallimpedanz liegt bei 414 kg m�2s. Um wahr-genommen zu werden, muss sie das Innenohr errei-chen, welches von einer wässrigen Flüssigkeit ge-füllt ist. Deren Schallimpedanz liegt bei Z2 ⇡ 1,4 ·106 kg m�2s. Gemäß Gleichung 6.13 würden somitnur etwa 0,1 % des Schalls das Innenohr erreichenund wir wären praktisch taub. Ein effizienter Hörsinnwird erst durch die Impedanzwandlung im Mittelohrerreicht.
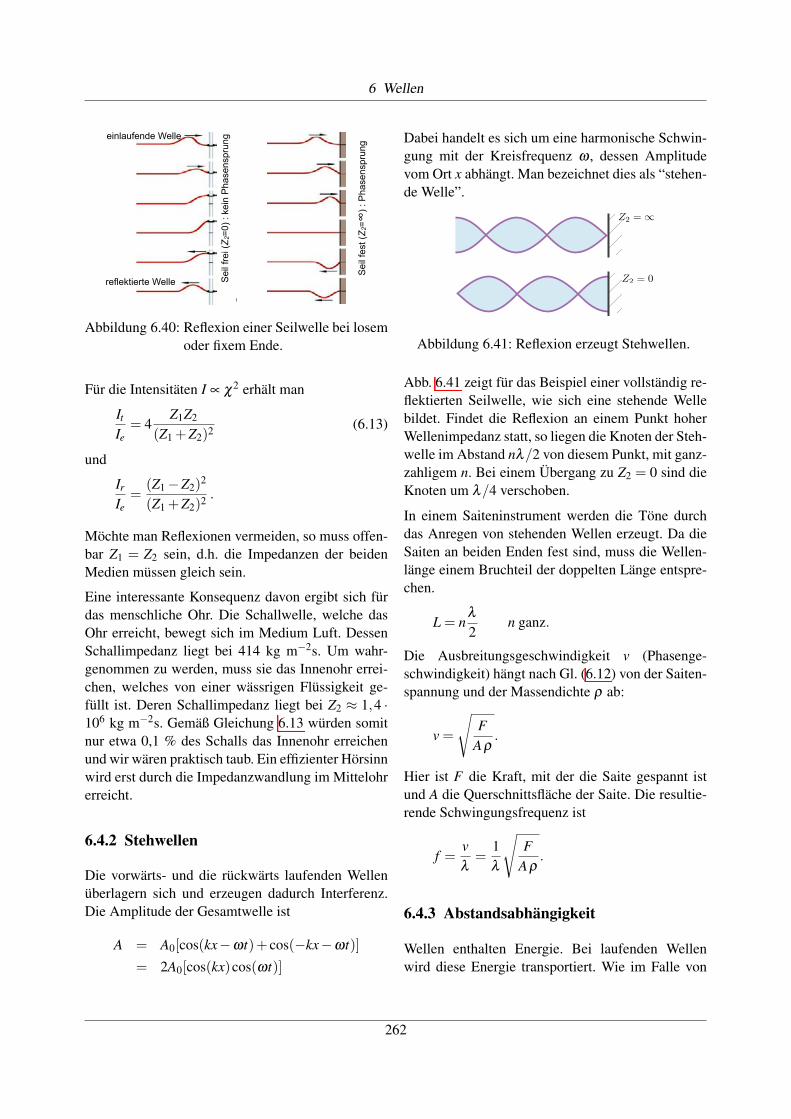
6.4.2 Stehwellen
Die vorwärts- und die rückwärts laufenden Wellenüberlagern sich und erzeugen dadurch Interferenz.Die Amplitude der Gesamtwelle ist
A = A0[cos(kx�wt)+ cos(�kx�wt)]= 2A0[cos(kx)cos(wt)]
Dabei handelt es sich um eine harmonische Schwin-gung mit der Kreisfrequenz w , dessen Amplitudevom Ort x abhängt. Man bezeichnet dies als “stehen-de Welle”.
1
Abbildung 6.41: Reflexion erzeugt Stehwellen.
Abb. 6.41 zeigt für das Beispiel einer vollständig re-flektierten Seilwelle, wie sich eine stehende Wellebildet. Findet die Reflexion an einem Punkt hoherWellenimpedanz statt, so liegen die Knoten der Steh-welle im Abstand nl/2 von diesem Punkt, mit ganz-zahligem n. Bei einem Übergang zu Z2 = 0 sind dieKnoten um l/4 verschoben.
In einem Saiteninstrument werden die Töne durchdas Anregen von stehenden Wellen erzeugt. Da dieSaiten an beiden Enden fest sind, muss die Wellen-länge einem Bruchteil der doppelten Länge entspre-chen.
L = nl2
n ganz.
Die Ausbreitungsgeschwindigkeit v (Phasenge-schwindigkeit) hängt nach Gl. (6.12) von der Saiten-spannung und der Massendichte r ab:
v =
sF
Ar.
Hier ist F die Kraft, mit der die Saite gespannt istund A die Querschnittsfläche der Saite. Die resultie-rende Schwingungsfrequenz ist
f =vl
=1l
sF
Ar.
6.4.3 Abstandsabhängigkeit
Wellen enthalten Energie. Bei laufenden Wellenwird diese Energie transportiert. Wie im Falle von
262
6 Wellen
akustischen Wellen diskutiert (Kap. 6.2.4) ist dieEnergiedichte proportional zum Quadrat der Ampli-tude.
Die Amplitude einer Welle schwächt sich bei derAusbreitung ab. Dazu tragen verschiedene Mecha-nismen bei, wie z.B. Absorption und Streuung.Streuung entspricht der (teilweisen) Reflexion anStrukturen mit unterschiedlichen Schallimpedanzenoder Schallgeschwindigkeiten, die nicht so regulärgeformt sind wie die oben diskutierte Grenzfläche.Neben diesen Verlustmechanismen führt auch diegeometrische Ausbreitung zu einer Abschwächung.
A1 � r2
A2 � (2r)2 = 4r2
I � 1
r2
r r
A1A2
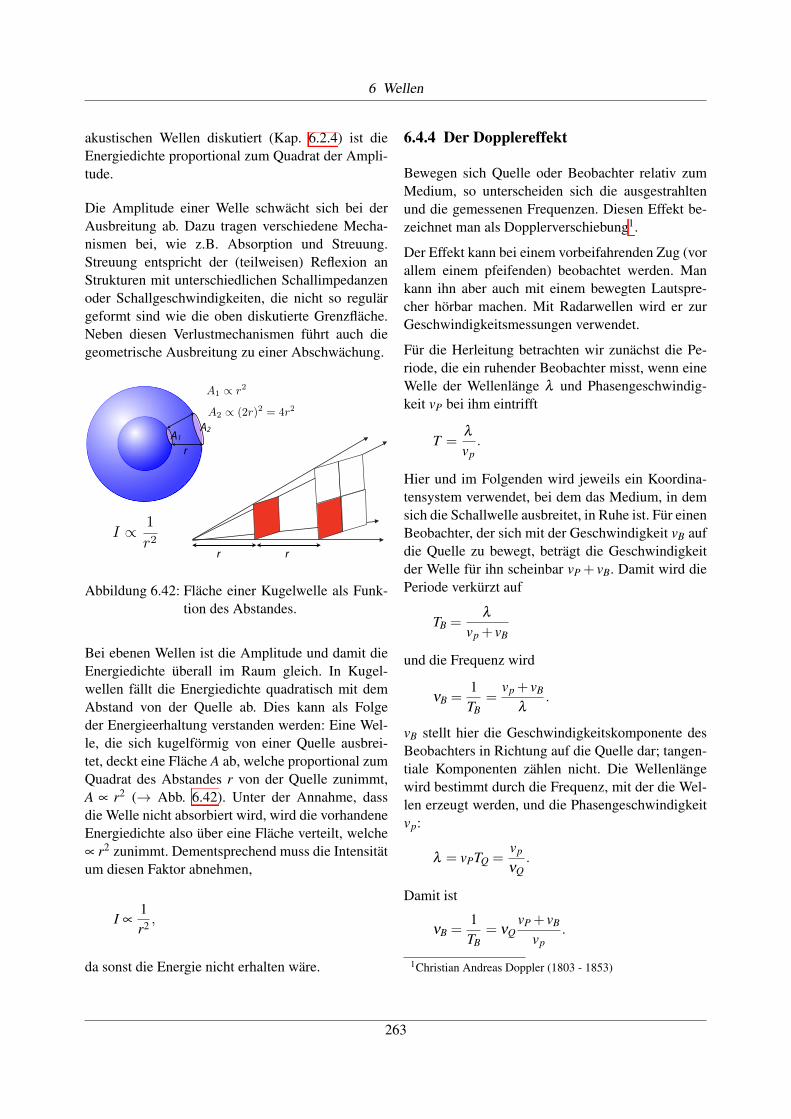
r
Abbildung 6.42: Fläche einer Kugelwelle als Funk-tion des Abstandes.
Bei ebenen Wellen ist die Amplitude und damit dieEnergiedichte überall im Raum gleich. In Kugel-wellen fällt die Energiedichte quadratisch mit demAbstand von der Quelle ab. Dies kann als Folgeder Energieerhaltung verstanden werden: Eine Wel-le, die sich kugelförmig von einer Quelle ausbrei-tet, deckt eine Fläche A ab, welche proportional zumQuadrat des Abstandes r von der Quelle zunimmt,A µ r2 (! Abb. 6.42). Unter der Annahme, dassdie Welle nicht absorbiert wird, wird die vorhandeneEnergiedichte also über eine Fläche verteilt, welcheµ r2 zunimmt. Dementsprechend muss die Intensitätum diesen Faktor abnehmen,
I µ 1r2 ,
da sonst die Energie nicht erhalten wäre.
6.4.4 Der Dopplereffekt
Bewegen sich Quelle oder Beobachter relativ zumMedium, so unterscheiden sich die ausgestrahltenund die gemessenen Frequenzen. Diesen Effekt be-zeichnet man als Dopplerverschiebung1.
Der Effekt kann bei einem vorbeifahrenden Zug (vorallem einem pfeifenden) beobachtet werden. Mankann ihn aber auch mit einem bewegten Lautspre-cher hörbar machen. Mit Radarwellen wird er zurGeschwindigkeitsmessungen verwendet.
Für die Herleitung betrachten wir zunächst die Pe-riode, die ein ruhender Beobachter misst, wenn eineWelle der Wellenlänge l und Phasengeschwindig-keit vP bei ihm eintrifft
T =lvp
.
Hier und im Folgenden wird jeweils ein Koordina-tensystem verwendet, bei dem das Medium, in demsich die Schallwelle ausbreitet, in Ruhe ist. Für einenBeobachter, der sich mit der Geschwindigkeit vB aufdie Quelle zu bewegt, beträgt die Geschwindigkeitder Welle für ihn scheinbar vP + vB. Damit wird diePeriode verkürzt auf
TB =l
vp + vB
und die Frequenz wird
nB =1TB
=vp + vB
l.
vB stellt hier die Geschwindigkeitskomponente desBeobachters in Richtung auf die Quelle dar; tangen-tiale Komponenten zählen nicht. Die Wellenlängewird bestimmt durch die Frequenz, mit der die Wel-len erzeugt werden, und die Phasengeschwindigkeitvp:
l = vPTQ =vp
nQ.
Damit ist
nB =1TB
= nQvP + vB
vp.
1Christian Andreas Doppler (1803 - 1853)
263
6 Wellen
Offenbar ist die Frequenz, die der Beobachter misst,gegenüber der ausgestrahlten Frequenz höher, umdas Verhältnis der Geschwindigkeit des Beobachtersgegenüber der Schallgeschwindigkeit:
nB = nQ
✓1±
vB
vp
◆.
Das + Zeichen bezieht sich auf den Fall dass der Be-obachter sich in Richtung auf die Quelle zu bewegt,das – Zeichen auf den entgegengesetzten Fall.
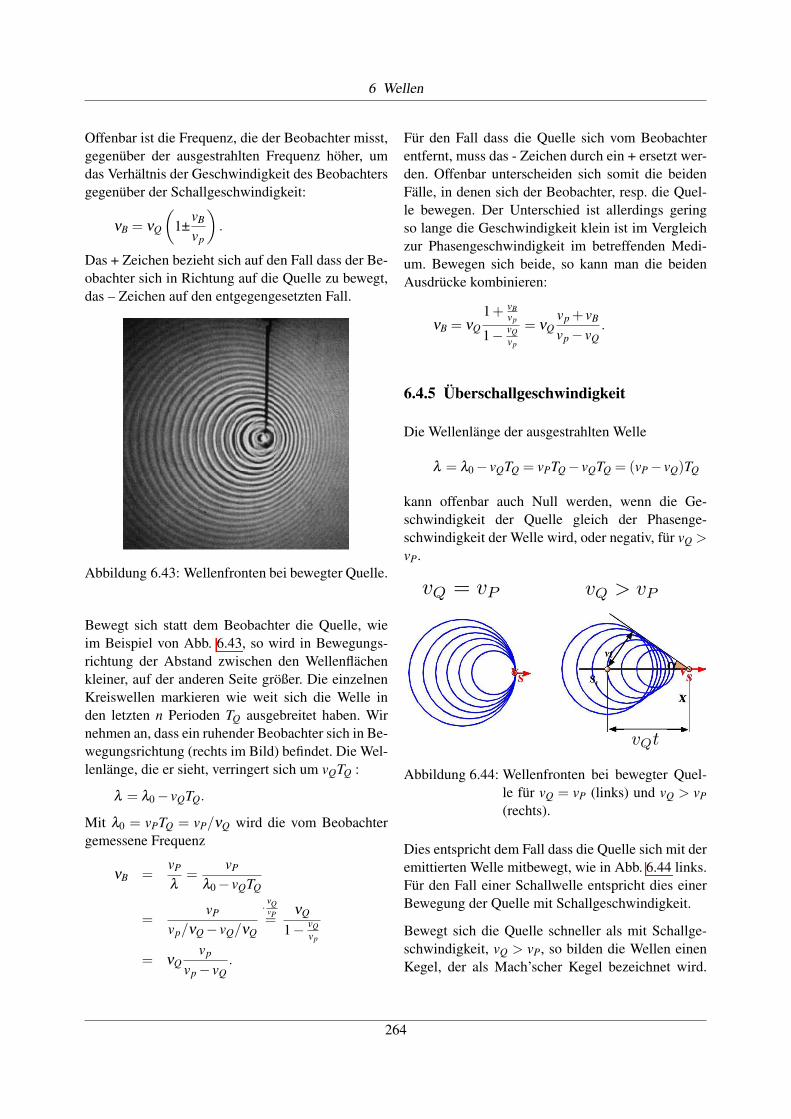
Abbildung 6.43: Wellenfronten bei bewegter Quelle.
Bewegt sich statt dem Beobachter die Quelle, wieim Beispiel von Abb. 6.43, so wird in Bewegungs-richtung der Abstand zwischen den Wellenflächenkleiner, auf der anderen Seite größer. Die einzelnenKreiswellen markieren wie weit sich die Welle inden letzten n Perioden TQ ausgebreitet haben. Wirnehmen an, dass ein ruhender Beobachter sich in Be-wegungsrichtung (rechts im Bild) befindet. Die Wel-lenlänge, die er sieht, verringert sich um vQTQ :
l = l0 � vQTQ.
Mit l0 = vPTQ = vP/nQ wird die vom Beobachtergemessene Frequenz
nB =vP
l=
vP
l0 � vQTQ
=vP
vp/nQ � vQ/nQ
·nQvP=
nQ
1� vQvp
= nQvp
vp � vQ.
Für den Fall dass die Quelle sich vom Beobachterentfernt, muss das - Zeichen durch ein + ersetzt wer-den. Offenbar unterscheiden sich somit die beidenFälle, in denen sich der Beobachter, resp. die Quel-le bewegen. Der Unterschied ist allerdings geringso lange die Geschwindigkeit klein ist im Vergleichzur Phasengeschwindigkeit im betreffenden Medi-um. Bewegen sich beide, so kann man die beidenAusdrücke kombinieren:
nB = nQ1+ vB
vp
1� vQvp
= nQvp + vB
vp � vQ.
6.4.5 Überschallgeschwindigkeit
Die Wellenlänge der ausgestrahlten Welle
l = l0 � vQTQ = vPTQ � vQTQ = (vP � vQ)TQ
kann offenbar auch Null werden, wenn die Ge-schwindigkeit der Quelle gleich der Phasenge-schwindigkeit der Welle wird, oder negativ, für vQ >vP.
Abbildung 6.44: Wellenfronten bei bewegter Quel-le für vQ = vP (links) und vQ > vP(rechts).
Dies entspricht dem Fall dass die Quelle sich mit deremittierten Welle mitbewegt, wie in Abb. 6.44 links.Für den Fall einer Schallwelle entspricht dies einerBewegung der Quelle mit Schallgeschwindigkeit.
Bewegt sich die Quelle schneller als mit Schallge-schwindigkeit, vQ > vP, so bilden die Wellen einenKegel, der als Mach’scher Kegel bezeichnet wird.
264
6 Wellen
Abbildung 6.45: Wellenfronten einer Quelle, derenGeschwindigkeit höher ist als diePhasengeschwindigkeit.
Abb. 6.45 zeigt einen solchen Kegel für ein Flug-zeug. Wie in Abb. 6.44 gezeigt, kann dessen Öff-nungswinkel berechnet werden, indem man berück-sichtigt, dass alle Kugelwellen den Kegel berühren.Befindet sich die Quelle zu t = 0 bei A und zur Zeitt bei B, hat sie die Strecke AQ = t vQ zurückgelegt,während die Schallwelle die Strecke AB = vPt zu-rückgelegt hat. Somit ist der halbe Öffnungswinkela gegeben als
sina =vPtvQt
=vp
vQ=
1Ma
.
Die Zahl Ma = vQ/vP, das Verhältnis der Ge-schwindigkeit zur Schallgeschwindigkeit, wird alsMach’sche Zahl bezeichnet.
Bei Flugzeugen wird der Mach’sche Kegel als Über-schallknall hörbar, z.T. aber auch sichtbar. Im Bei-spiel von Abb. 6.45 kann man den Mach’schen Kegelsehen, da die Druckänderung zu einer Kondensationvon Wasserdampf führt.
6.5 Elektromagnetische Wellen
6.5.1 Das elektromagnetische Spektrum
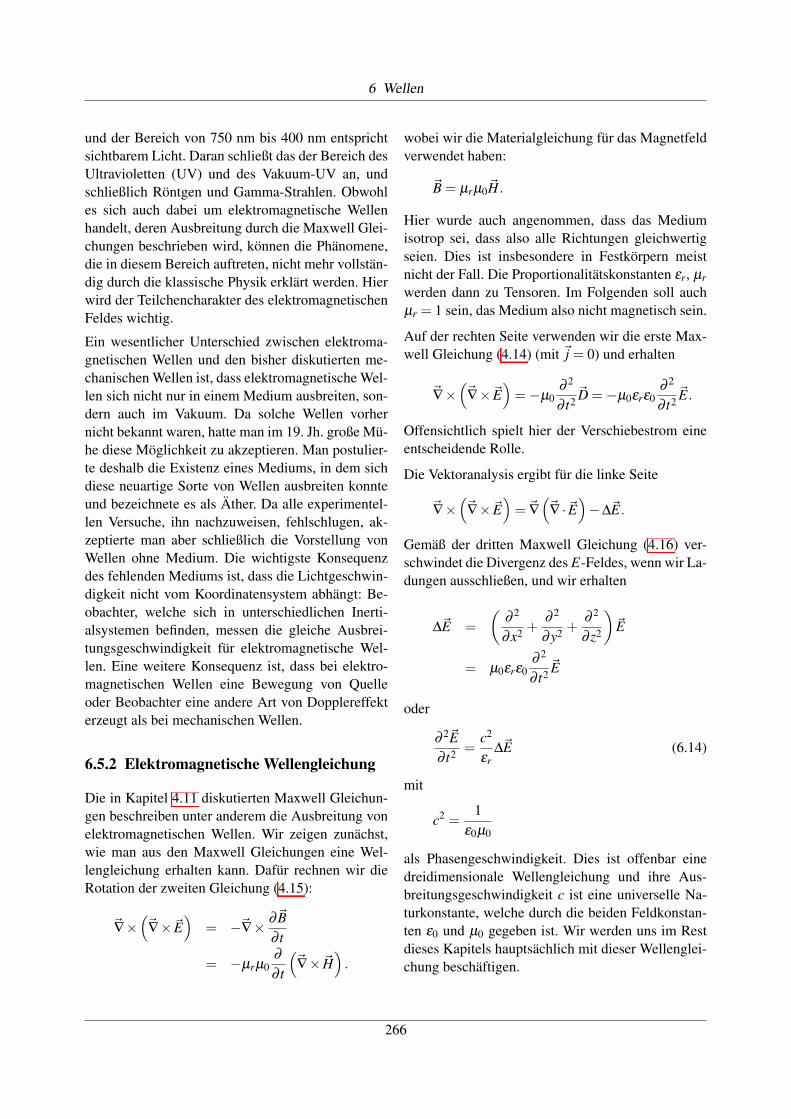
Elektromagnetische Wellen sind Wellen, bei denenelektrische und magnetische Felder sich in Zeit undRaum ausbreiten. Heute kennt man sehr unterschied-liche elektromagnetische Wellen. Ihre Frequenzenreichen von wenigen Hertz bis zu 1023 Hertz. Einwichtiger, wenn auch schmaler Bereich ist das sicht-bare Spektrum, welches zwischen 1014 und 1015
Hertz liegt. Von praktischer Bedeutung ist aber dergesamte Bereich von etwa 106 Hz bis 1018 Hz.
Mittel- UKW & Kurz- und welle Fernsehen
1
700 600 500 nm 400
sichtbares Licht
v [Hz]Frequenz
Lang- welle
Mikro- wellen Infrarot Ultraviolett Röntgen Gamma
106 109 1012 1015 1018 1021
Wellenlänge λ [m]103 100 10-3 10-6 10-9 10-12
PHzTHzGHzMHz
Abbildung 6.46: Spektrum der elektromagnetischenWellen.
Die elektromagnetische Skala kann nach Wellenlän-gen, Frequenzen oder Energien gegliedert werden.Abb. 6.46 zeigt dies für einen Bereich von den Rönt-genstrahlen bis zu den Radiowellen. Im langwelligenBereich beginnt die Skala mit Radiowellen, derenWellenlängen praktisch beliebig lang werden kön-nen. Hier fand aufgrund der technischen Entwick-lung eine Inflation der Namengebung statt: Man un-terteilte zunächst in vlf, lf, mf, hf. Als höhere Fre-quenzen erreicht wurden, mussten neue Namen ge-funden werden: vhf, uhf, shf, ehf.
Im Bereich von ca. 1 GHz, resp. 30 cm Wellen-länge beginnt man üblicherweise von Mikrowellenzu sprechen. Im Bereich von einigen THz, resp. beiWellenlängen von etwa 1 mm spricht man von Mil-limeterwellen oder THz-Wellen, für noch kürzereWellenlängen von Fern-Infrarot. Ab einer Wellen-länge von ca. 10 - 0.75 µm spricht man von Infrarot
265
6 Wellen
und der Bereich von 750 nm bis 400 nm entsprichtsichtbarem Licht. Daran schließt das der Bereich desUltravioletten (UV) und des Vakuum-UV an, undschließlich Röntgen und Gamma-Strahlen. Obwohles sich auch dabei um elektromagnetische Wellenhandelt, deren Ausbreitung durch die Maxwell Glei-chungen beschrieben wird, können die Phänomene,die in diesem Bereich auftreten, nicht mehr vollstän-dig durch die klassische Physik erklärt werden. Hierwird der Teilchencharakter des elektromagnetischenFeldes wichtig.
Ein wesentlicher Unterschied zwischen elektroma-gnetischen Wellen und den bisher diskutierten me-chanischen Wellen ist, dass elektromagnetische Wel-len sich nicht nur in einem Medium ausbreiten, son-dern auch im Vakuum. Da solche Wellen vorhernicht bekannt waren, hatte man im 19. Jh. große Mü-he diese Möglichkeit zu akzeptieren. Man postulier-te deshalb die Existenz eines Mediums, in dem sichdiese neuartige Sorte von Wellen ausbreiten konnteund bezeichnete es als Äther. Da alle experimentel-len Versuche, ihn nachzuweisen, fehlschlugen, ak-zeptierte man aber schließlich die Vorstellung vonWellen ohne Medium. Die wichtigste Konsequenzdes fehlenden Mediums ist, dass die Lichtgeschwin-digkeit nicht vom Koordinatensystem abhängt: Be-obachter, welche sich in unterschiedlichen Inerti-alsystemen befinden, messen die gleiche Ausbrei-tungsgeschwindigkeit für elektromagnetische Wel-len. Eine weitere Konsequenz ist, dass bei elektro-magnetischen Wellen eine Bewegung von Quelleoder Beobachter eine andere Art von Dopplereffekterzeugt als bei mechanischen Wellen.
6.5.2 Elektromagnetische Wellengleichung
Die in Kapitel 4.11 diskutierten Maxwell Gleichun-gen beschreiben unter anderem die Ausbreitung vonelektromagnetischen Wellen. Wir zeigen zunächst,wie man aus den Maxwell Gleichungen eine Wel-lengleichung erhalten kann. Dafür rechnen wir dieRotation der zweiten Gleichung (4.15):
~—⇥⇣~—⇥~E
⌘= �~—⇥ ∂~B
∂ t
= �µrµ0∂∂ t
⇣~—⇥ ~H
⌘.
wobei wir die Materialgleichung für das Magnetfeldverwendet haben:
~B = µrµ0~H.
Hier wurde auch angenommen, dass das Mediumisotrop sei, dass also alle Richtungen gleichwertigseien. Dies ist insbesondere in Festkörpern meistnicht der Fall. Die Proportionalitätskonstanten er, µrwerden dann zu Tensoren. Im Folgenden soll auchµr = 1 sein, das Medium also nicht magnetisch sein.
Auf der rechten Seite verwenden wir die erste Max-well Gleichung (4.14) (mit ~j = 0) und erhalten
~—⇥⇣~—⇥~E
⌘= �µ0
∂ 2
∂ t2~D = �µ0ere0
∂ 2
∂ t2~E.
Offensichtlich spielt hier der Verschiebestrom eineentscheidende Rolle.
Die Vektoranalysis ergibt für die linke Seite
~—⇥⇣~—⇥~E
⌘= ~—
⇣~— ·~E
⌘�D~E.
Gemäß der dritten Maxwell Gleichung (4.16) ver-schwindet die Divergenz des E-Feldes, wenn wir La-dungen ausschließen, und wir erhalten
D~E =
✓∂ 2
∂x2 +∂ 2
∂y2 +∂ 2
∂ z2
◆~E
= µ0ere0∂ 2
∂ t2~E
oder
∂ 2~E∂ t2 =
c2
erD~E (6.14)
mit
c2 =1
e0µ0
als Phasengeschwindigkeit. Dies ist offenbar einedreidimensionale Wellengleichung und ihre Aus-breitungsgeschwindigkeit c ist eine universelle Na-turkonstante, welche durch die beiden Feldkonstan-ten e0 und µ0 gegeben ist. Wir werden uns im Restdieses Kapitels hauptsächlich mit dieser Wellenglei-chung beschäftigen.
266

6 Wellen
Eine analoge Wellengleichung kann man natürlichauch für das magnetische Feld herleiten. Meist istes aber einfacher, die Gleichung für das elektrischeFeld zu lösen und anschließend die magnetischenKomponenten aus den Maxwell Gleichungen zu be-stimmen (! Kap. 6.5.4).
Offenbar sind die drei Komponenten des elektri-schen Feldes in dieser Gleichung unabhängig von-einander. Im allgemeinen Fall erwarten wir somitdrei voneinander unabhängige Lösungen, z.B. einelongitudinale und zwei transversale Wellen, wie imFall von Gitterschwingungen.
6.5.3 Ebene Wellen
Die Lösungen dieser Gleichung hängen wie immervon den Randbedingungen ab. Wir betrachten zu-nächst den einfachsten Fall einer harmonischen ebe-nen Welle. Für die Ausbreitungsrichtung verwendenwir ohne Verlust an Allgemeinheit die z-Richtung.Damit wird der Ansatz
~E = Re
8<
:
0
@ExEyEz
1
Aei(wt�kz)
9=
; , (6.15)
wobei Ex, Ey, Ez die komplexen Amplituden darstel-len.
Einsetzen in die Wellengleichung (6.14) ergibt fürdie linke Seite
0
@ExEyEz
1
A✓
∂ 2
∂x2 +∂ 2
∂y2 +∂ 2
∂ z2
◆ei(wt�kz)
=
0
@ExEyEz
1
A c2
er
∂ 2
∂ z2 ei(wt�kz).
Somit wird die Wellengleichung zu
�k2
0
@ExEyEz
1
A = � er
c2 w2
0
@ExEyEz
1
A .
Offenbar muss also die Dispersionsrelation lauten
k2 = w2 er
c2 = w2 n2
c2 ,
d.h. der Ansatz beschreibt eine gültige Lösung fallsw = kc/n, d.h. falls die Ausbreitungsgeschwindig-keit gerade gleich c/n ist. c = 299793 km/s istdie Ausbreitungsgeschwindigkeit im Vakuum oderVakuum-Lichtgeschwindigkeit. Interessant ist, dassdie elektrostatischen Größen e0 und µ0 die Aus-breitungsgeschwindigkeit der Welle bestimmen. n =p
er wird als Brechungsindex bezeichnet; er be-schreibt die Reduktion der Ausbreitungsgeschwin-digkeit durch das Medium. Diese Materialeigen-schaften sind jedoch frequenzabhängig, d.h. sie un-terscheiden sich von den Werten, die man in derElektrostatik findet.
6.5.4 Magnetfeld
Der obige Ansatz genügt also der vorhin hergelei-teten Wellengleichung. Wir müssen aber noch über-prüfen, ob er auch die Maxwell Gleichungen erfüllt.Insbesondere haben wir bisher nur das elektrischeFeld berücksichtigt. Wir setzen es ein in die Glei-chung
~—⇥~E = � ∂∂ t
~B.
Diese Gleichung kann nur erfüllt sein, wenn das ma-gnetische und elektrische Feld die gleiche raumzeit-liche Abhängigkeit besitzen, d.h.
~B =
0
@BxByBz
1
Aei(wt�kz),
Die Ableitungen ∂/∂x und ∂/∂y verschwinden wie-der, so dass sich die Rotation vereinfacht zu
~—⇥~E =
0
B@� ∂Ey
∂ z∂Ex∂ z0
1
CA .
Die Maxwell Gleichung ergibt
�ik
0
@�EyEx0
1
A = �iw
0
@BxByBz
1
A .
Offenbar muss die longitudinale Komponente desMagnetfeldes verschwinden, Bz = 0.
267
6 Wellen
Aus der Gleichung
~—⇥ ~H =∂∂ t
~D
folgt analog, dass die longitudinale Komponente deselektrischen Feldes verschwindet,
Ez = Hz = Dz = Bz = 0,
d.h. die Komponenten der Felder in Ausbreitungs-richtung verschwinden. Offenbar sind elektroma-gnetischen Wellen in einem isotropen Medium reineTransversalwellen.
Man kann diese Beziehung auch direkt aus der Glei-chung
~— ·~E =∂Ex
∂x+
∂Ey
∂y+
∂Ez
∂ z= 0
für ein Medium ohne Ladungen herleiten: GemäßAnsatz (6.15) ist die einzige Ableitung, die nicht ver-schwindet, diejenige nach z und somit
~— ·~E =∂Ez
∂ z= �ikzEz = 0.
Diese Gleichung kann offenbar nur dann erfüllt sein,wenn Ez identisch verschwindet. Dies gilt allerdingsnur für den Fall von isotropen dielektrischen Medi-en; anisotrope Eigenschaften können zu longitudina-len Komponenten führen; ebenso enthalten elektro-magnetische Wellen in elektrisch leitenden Medienlongitudinale Komponenten.
E
H
Magnetfeldelektrisches Feld
Ausbreitungs- richtung
ebene Welle
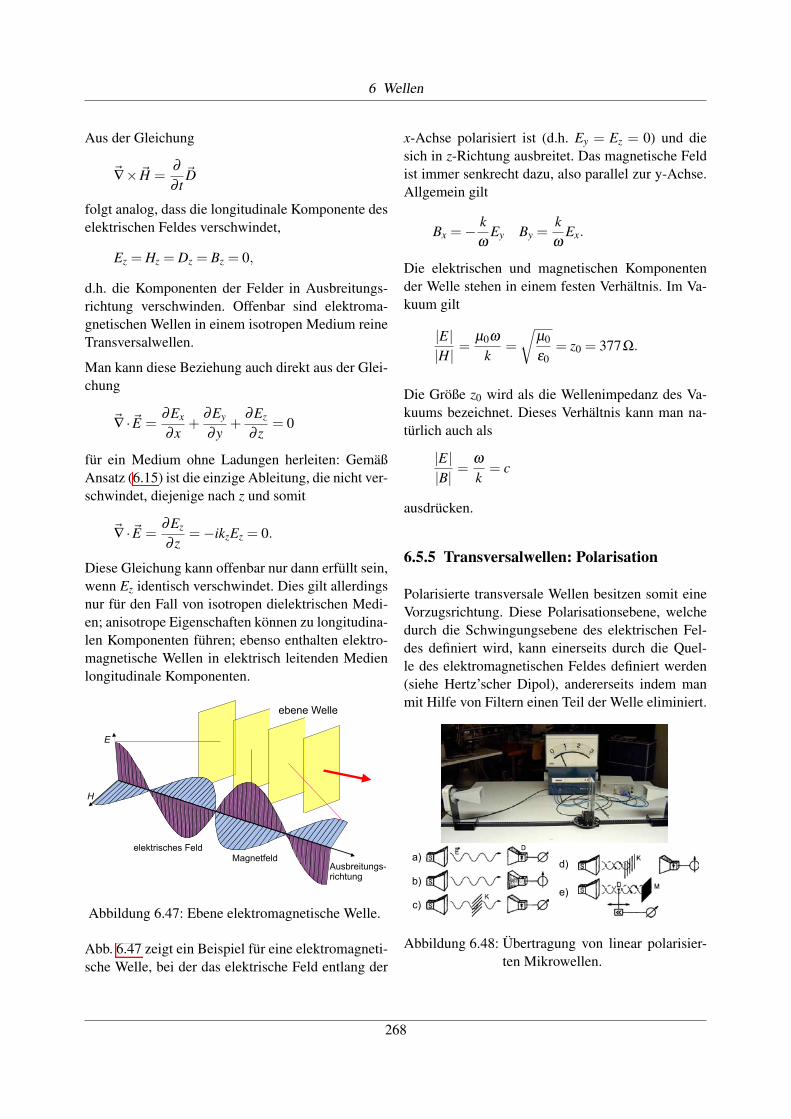
Abbildung 6.47: Ebene elektromagnetische Welle.
Abb. 6.47 zeigt ein Beispiel für eine elektromagneti-sche Welle, bei der das elektrische Feld entlang der
x-Achse polarisiert ist (d.h. Ey = Ez = 0) und diesich in z-Richtung ausbreitet. Das magnetische Feldist immer senkrecht dazu, also parallel zur y-Achse.Allgemein gilt
Bx = � kw
Ey By =kw
Ex.
Die elektrischen und magnetischen Komponentender Welle stehen in einem festen Verhältnis. Im Va-kuum gilt
|E||H| =
µ0wk
=
rµ0
e0= z0 = 377W.
Die Größe z0 wird als die Wellenimpedanz des Va-kuums bezeichnet. Dieses Verhältnis kann man na-türlich auch als
|E||B| =
wk
= c
ausdrücken.
6.5.5 Transversalwellen: Polarisation
Polarisierte transversale Wellen besitzen somit eineVorzugsrichtung. Diese Polarisationsebene, welchedurch die Schwingungsebene des elektrischen Fel-des definiert wird, kann einerseits durch die Quel-le des elektromagnetischen Feldes definiert werden(siehe Hertz’scher Dipol), andererseits indem manmit Hilfe von Filtern einen Teil der Welle eliminiert.
a)
b)
c)
d)
e)
Abbildung 6.48: Übertragung von linear polarisier-ten Mikrowellen.
268
6 Wellen
Abb. 6.48 zeigt ein Experiment, das eine Mikro-wellenquelle verwendet, welche polarisierte Mikro-wellen erzeugt. Der Empfänger ist ebenfalls nurauf Wellen mit einer bestimmten Polarisationsrich-tung empfindlich. Ein Metallgitter kann verwendetwerden, um nur eine bestimmt Polarisationsrichtungdurchzulassen: ist die Welle parallel zu den Stäbenpolarisiert, so wird sie daran reflektiert.
6.5.6 Hertz’scher Dipol
Elektromagnetische Wellen werden durch schwin-gende elektrische Ladungen erzeugt. Ein einfachesModell für schwingende Ladungen ist der in Kapitel5.3.5 behandelte LC-Schwingkreis. Solche Schwin-gungen bilden die Quellen der Wellen. Umgekehrtkönnen elektromagnetische Wellen nachgewiesenwerden, indem man ihren Effekt auf bewegliche La-dungen untersucht. So ist jeder Schwingkreis mit derFrequenz w = 1/
pLC die Quelle einer elektroma-
gnetischen Welle: Sowohl das elektrische, wie auchdas magnetische Feld sind zeitabhängig.
LC Schwingkreis Dipoleantenne
~H
~E
~H
~E
~H
~E
~H
~E
Abbildung 6.49: LC-Schwingkreis wird zu Dipoldeformiert.
Bei den üblicherweise verwendeten Spulen undKondensatoren in LC-Schwingkreisen sind die Fel-der stark im Inneren lokalisiert. Durch eine andereAnordnung kann man die Felder aber auch nach au-ßen richten und dadurch eine Abstrahlung begünsti-gen. Abb. 6.49 zeigt als Beispiel den Übergang voneinem kompakten LC-Schwingkreis zu einer Dipol-antenne.
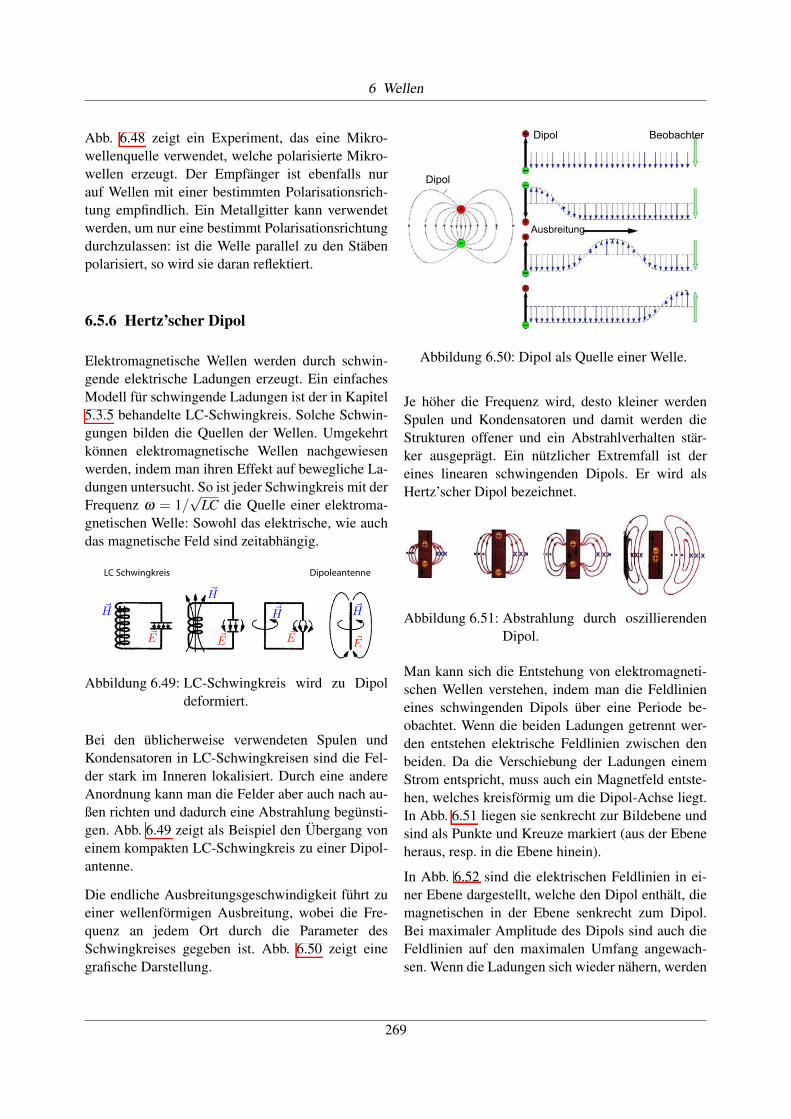
Die endliche Ausbreitungsgeschwindigkeit führt zueiner wellenförmigen Ausbreitung, wobei die Fre-quenz an jedem Ort durch die Parameter desSchwingkreises gegeben ist. Abb. 6.50 zeigt einegrafische Darstellung.
Dipol
Dipol Beobachter
Ausbreitung
Abbildung 6.50: Dipol als Quelle einer Welle.
Je höher die Frequenz wird, desto kleiner werdenSpulen und Kondensatoren und damit werden dieStrukturen offener und ein Abstrahlverhalten stär-ker ausgeprägt. Ein nützlicher Extremfall ist dereines linearen schwingenden Dipols. Er wird alsHertz’scher Dipol bezeichnet.
Abbildung 6.51: Abstrahlung durch oszillierendenDipol.
Man kann sich die Entstehung von elektromagneti-schen Wellen verstehen, indem man die Feldlinieneines schwingenden Dipols über eine Periode be-obachtet. Wenn die beiden Ladungen getrennt wer-den entstehen elektrische Feldlinien zwischen denbeiden. Da die Verschiebung der Ladungen einemStrom entspricht, muss auch ein Magnetfeld entste-hen, welches kreisförmig um die Dipol-Achse liegt.In Abb. 6.51 liegen sie senkrecht zur Bildebene undsind als Punkte und Kreuze markiert (aus der Ebeneheraus, resp. in die Ebene hinein).
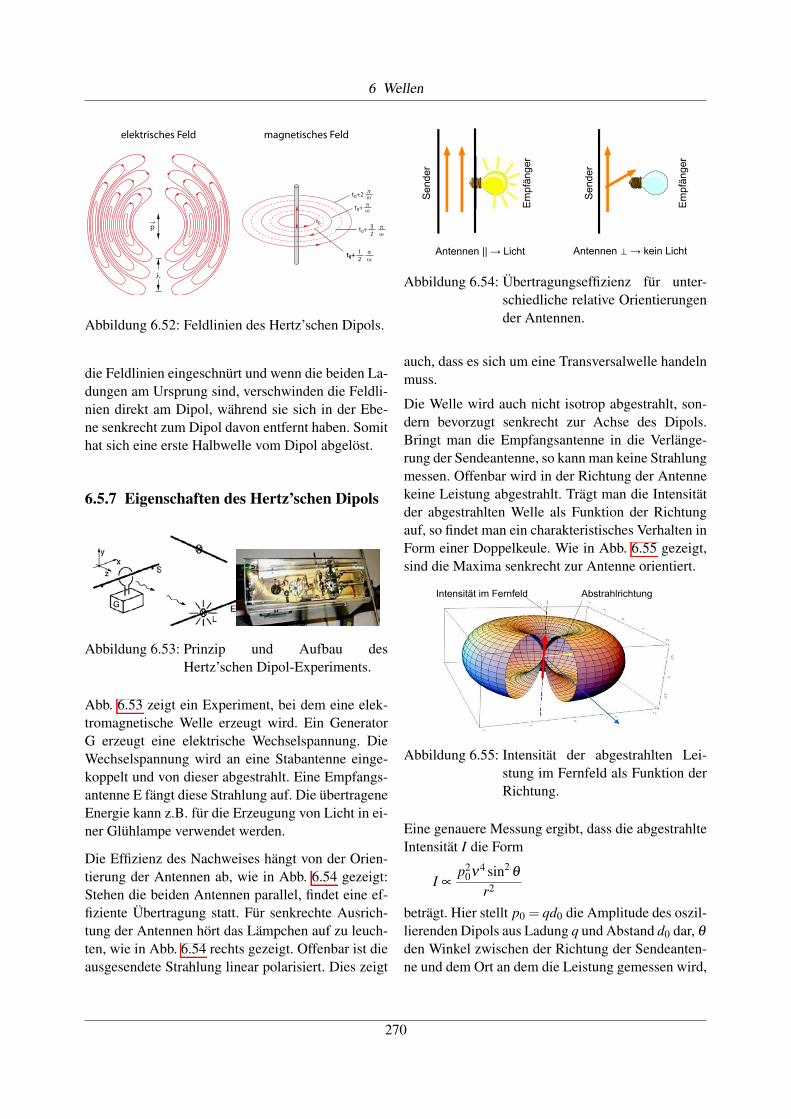
In Abb. 6.52 sind die elektrischen Feldlinien in ei-ner Ebene dargestellt, welche den Dipol enthält, diemagnetischen in der Ebene senkrecht zum Dipol.Bei maximaler Amplitude des Dipols sind auch dieFeldlinien auf den maximalen Umfang angewach-sen. Wenn die Ladungen sich wieder nähern, werden
269
6 Wellen
3t
πω
t +
πω
2πω
1 πω2
0
0t +0
t +0
t +0
t +20
p→
λ
elektrisches Feld magnetisches Feld
Abbildung 6.52: Feldlinien des Hertz’schen Dipols.
die Feldlinien eingeschnürt und wenn die beiden La-dungen am Ursprung sind, verschwinden die Feldli-nien direkt am Dipol, während sie sich in der Ebe-ne senkrecht zum Dipol davon entfernt haben. Somithat sich eine erste Halbwelle vom Dipol abgelöst.
6.5.7 Eigenschaften des Hertz’schen Dipols
Abbildung 6.53: Prinzip und Aufbau desHertz’schen Dipol-Experiments.
Abb. 6.53 zeigt ein Experiment, bei dem eine elek-tromagnetische Welle erzeugt wird. Ein GeneratorG erzeugt eine elektrische Wechselspannung. DieWechselspannung wird an eine Stabantenne einge-koppelt und von dieser abgestrahlt. Eine Empfangs-antenne E fängt diese Strahlung auf. Die übertrageneEnergie kann z.B. für die Erzeugung von Licht in ei-ner Glühlampe verwendet werden.
Die Effizienz des Nachweises hängt von der Orien-tierung der Antennen ab, wie in Abb. 6.54 gezeigt:Stehen die beiden Antennen parallel, findet eine ef-fiziente Übertragung statt. Für senkrechte Ausrich-tung der Antennen hört das Lämpchen auf zu leuch-ten, wie in Abb. 6.54 rechts gezeigt. Offenbar ist dieausgesendete Strahlung linear polarisiert. Dies zeigt
Sen
der
Em
pfän
ger
Antennen || → Licht Antennen ⊥ → kein Licht
Sen
der
Em
pfän
ger
Abbildung 6.54: Übertragungseffizienz für unter-schiedliche relative Orientierungender Antennen.
auch, dass es sich um eine Transversalwelle handelnmuss.
Die Welle wird auch nicht isotrop abgestrahlt, son-dern bevorzugt senkrecht zur Achse des Dipols.Bringt man die Empfangsantenne in die Verlänge-rung der Sendeantenne, so kann man keine Strahlungmessen. Offenbar wird in der Richtung der Antennekeine Leistung abgestrahlt. Trägt man die Intensitätder abgestrahlten Welle als Funktion der Richtungauf, so findet man ein charakteristisches Verhalten inForm einer Doppelkeule. Wie in Abb. 6.55 gezeigt,sind die Maxima senkrecht zur Antenne orientiert.
Intensität im Fernfeld Abstrahlrichtung
Abbildung 6.55: Intensität der abgestrahlten Lei-stung im Fernfeld als Funktion derRichtung.
Eine genauere Messung ergibt, dass die abgestrahlteIntensität I die Form
I µp2
0n4 sin2 qr2
beträgt. Hier stellt p0 = qd0 die Amplitude des oszil-lierenden Dipols aus Ladung q und Abstand d0 dar, qden Winkel zwischen der Richtung der Sendeanten-ne und dem Ort an dem die Leistung gemessen wird,
270

6 Wellen
n die Frequenz und r den Abstand von der Anten-ne. Abbildung 6.55 zeigt eine grafische Darstellungder Richtungsabhängigkeit. Die Abnahme der Inten-sität mit dem Quadrat des Abstandes stellt lediglichdie Erhaltung der Energie dar: das Integral über eineKugeloberfläche im Abstand r bleibt konstant. DieAbhängigkeit von der vierten Potenz der Frequenzzeigt, dass Abstrahlung bei höheren Frequenzen we-sentlich einfacher zu erreichen ist als bei niedrigen.
6.5.8 Übertragung von Energie und Impuls
Aus der Elektrostatik ist bekannt, dass elektroma-gnetische Felder Energie enthalten:
w =12
⇣~E ·~D+ ~H ·~B
⌘.
Im Unterschied zur Elektrostatik ist diese Energieim Falle von elektromagnetischen Wellen beweglich,d.h. sie fließt durch das System. Wenn sie mit Ladun-gen in Wechselwirkung treten, so leisten sie Arbeitan diesen. Umgekehrt fließt bei der Erzeugung vonelektromagnetischen Wellen Energie aus der mecha-nischen Bewegung von Ladungen in das elektroma-gnetische Feld. Dieser Transport und Austausch vonEnergie muss die gesamte Energie des Systems kon-stant lassen. Die Energieerhaltung für elektromagne-tische Felder ist der Inhalt des Theorems von Poyn-ting, der diese Betrachtungen im Jahr 1884 als ersterdurchführte.
Aus der Beziehung zwischen elektrischer und ma-gnetischer Feldstärke
|E||H| =
rµrµ0
ere0
sehen wir, dass die elektrische und magnetischeEnergiedichte einer ebenen Welle gleich sind,
wE =12
e0erE2 =12
µ0µrH2 = wH .
Die gesamte Energiedichte ist somit
w = wE +wH =12
e0erE2 +12
µ0µrH2
=p
e0erµ0µrEH =nc
EH.
Der Energiefluss ist die Energiedichte multipliziertmit der Ausbreitungsgeschwindigkeit der Welle, also
S =cn
w = EH.
Wie man aus der Lösung der Wellengleichung sieht,ist der Vektor
~S = ~E ⇥ ~H
in Ausbreitungsrichtung orientiert und hat den Be-trag des Energieflusses. Er wird als Poyntingvektorbezeichnet und beschreibt den (ort- und zeitabhängi-gen) Energiefluss. Der Poyntingvektor besitzt offen-bar die Einheiten
[S] = [E][H]=Vm
Am
=Wm2 ,
also Leistung pro Fläche.
Die Intensität ist definiert als der Mittelwert desEnergieflusses über eine Periode,
I =12
E0H0.
In ähnlicher Weise wie die transportierte Energiekann man auch den Impuls des Feldes berechnen.Die Existenz eines Impulses für die elektromagne-tische Welle kann man sich leicht plausibel machen,wenn man die Bewegung eines geladenen Teilchensim elektromagnetischen Feld der Welle betrachtet.Eine Welle, die sich in z-Richtung ausbreitet, derenelektrisches Feld in x-Richtung und das magnetischein y-Richtung liegt, erzeugt zunächst eine Coulomb-Kraft auf die Ladung, welche diese in x-Richtungbeschleunigt. Damit führt sie eine Bewegung senk-recht zum B-Feld durch, welche eine Lorentzkraftbewirkt. Damit erhält das Teilchen eine Beschleuni-gung in z-Richtung, also einen Impulsübertrag, wel-cher aus der Welle stammen muss. Damit ist auchklar, dass die Impulsdichte proportional zum Pro-dukt aus E und B sein muss. Die Impulsdichte derWelle beträgt im Vakuum
~pFeld = ~D⇥~B = e0µ0~E ⇥ ~H =1c2
~S.
Damit übt eine Welle einen Strahlungsdruck aus,welcher proportional zu ihrer Intensität ist. Wird eine
271
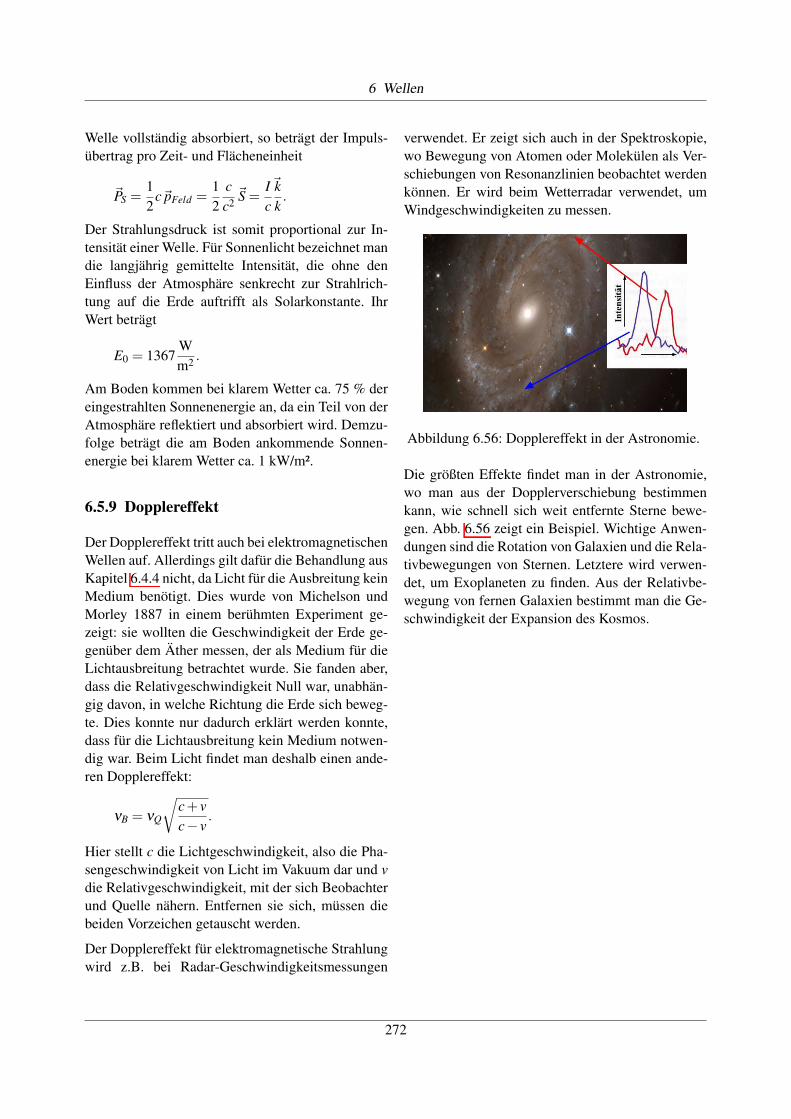
6 Wellen
Welle vollständig absorbiert, so beträgt der Impuls-übertrag pro Zeit- und Flächeneinheit
~PS =12
c~pFeld =12
cc2
~S =Ic
~kk.
Der Strahlungsdruck ist somit proportional zur In-tensität einer Welle. Für Sonnenlicht bezeichnet mandie langjährig gemittelte Intensität, die ohne denEinfluss der Atmosphäre senkrecht zur Strahlrich-tung auf die Erde auftrifft als Solarkonstante. IhrWert beträgt
E0 = 1367Wm2 .
Am Boden kommen bei klarem Wetter ca. 75 % dereingestrahlten Sonnenenergie an, da ein Teil von derAtmosphäre reflektiert und absorbiert wird. Demzu-folge beträgt die am Boden ankommende Sonnen-energie bei klarem Wetter ca. 1 kW/m².
6.5.9 Dopplereffekt
Der Dopplereffekt tritt auch bei elektromagnetischenWellen auf. Allerdings gilt dafür die Behandlung ausKapitel 6.4.4 nicht, da Licht für die Ausbreitung keinMedium benötigt. Dies wurde von Michelson undMorley 1887 in einem berühmten Experiment ge-zeigt: sie wollten die Geschwindigkeit der Erde ge-genüber dem Äther messen, der als Medium für dieLichtausbreitung betrachtet wurde. Sie fanden aber,dass die Relativgeschwindigkeit Null war, unabhän-gig davon, in welche Richtung die Erde sich beweg-te. Dies konnte nur dadurch erklärt werden konnte,dass für die Lichtausbreitung kein Medium notwen-dig war. Beim Licht findet man deshalb einen ande-ren Dopplereffekt:
nB = nQ
rc+ vc� v
.
Hier stellt c die Lichtgeschwindigkeit, also die Pha-sengeschwindigkeit von Licht im Vakuum dar und vdie Relativgeschwindigkeit, mit der sich Beobachterund Quelle nähern. Entfernen sie sich, müssen diebeiden Vorzeichen getauscht werden.
Der Dopplereffekt für elektromagnetische Strahlungwird z.B. bei Radar-Geschwindigkeitsmessungen
verwendet. Er zeigt sich auch in der Spektroskopie,wo Bewegung von Atomen oder Molekülen als Ver-schiebungen von Resonanzlinien beobachtet werdenkönnen. Er wird beim Wetterradar verwendet, umWindgeschwindigkeiten zu messen.
Abbildung 6.56: Dopplereffekt in der Astronomie.
Die größten Effekte findet man in der Astronomie,wo man aus der Dopplerverschiebung bestimmenkann, wie schnell sich weit entfernte Sterne bewe-gen. Abb. 6.56 zeigt ein Beispiel. Wichtige Anwen-dungen sind die Rotation von Galaxien und die Rela-tivbewegungen von Sternen. Letztere wird verwen-det, um Exoplaneten zu finden. Aus der Relativbe-wegung von fernen Galaxien bestimmt man die Ge-schwindigkeit der Expansion des Kosmos.
272