Embed Size (px)
Citation preview

2/Maio/2018 – Aula 15
7Maio/2018 – Aula 16
16 Movimento periódico 16.1 Movimento harmónico simples (MHS) 16.2 Conservação da energia no MHS
1
15 Movimento de planetas 15.1 Leis de Keppler 15.2 Conservação da energia 15.3 Velocidade de escape 15.4 Movimento de satélites
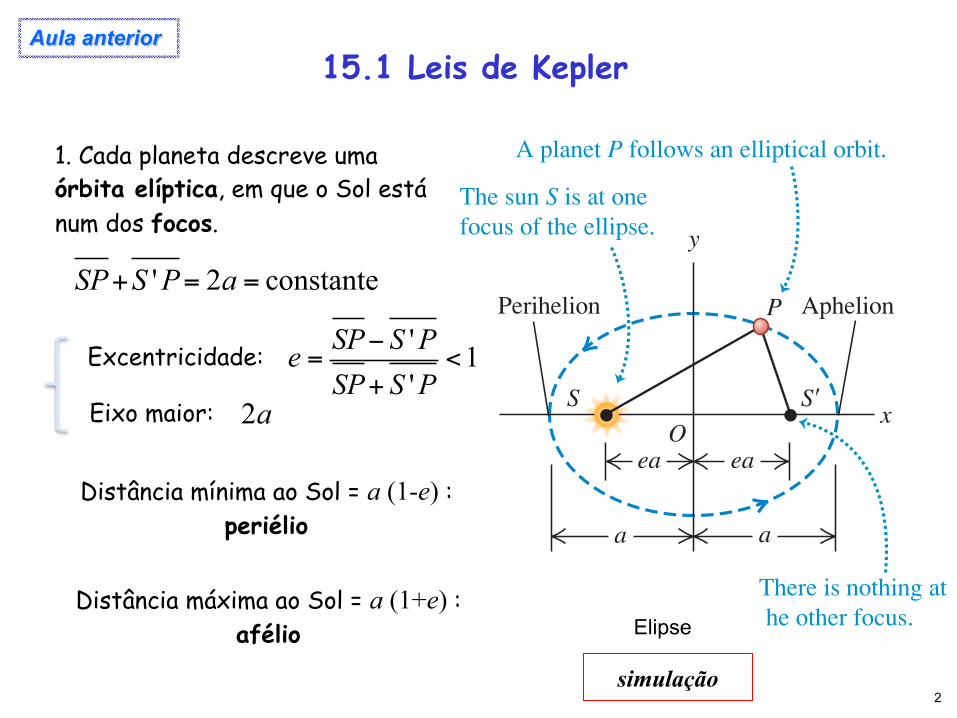
1. Cada planeta descreve uma órbita elíptica, em que o Sol está num dos focos.
2
15.1 Leis de Kepler
13.5 Kepler’s Laws and the Motion of Planets 415
y
There is nothing atthe other focus.
The sun S is at onefocus of the ellipse.
A planet P follows an elliptical orbit.
AphelionPerihelion
Ox
P
ea ea
a a
S!S
13.18 Geometry of an ellipse. The sumof the distances SP and is the same forevery point on the curve. The sizes of thesun (S) and planet (P) are exaggerated forclarity.
S¿Pdiscovered three empirical laws that accurately described the motions of theplanets:
1. Each planet moves in an elliptical orbit, with the sun at one focus of theellipse.
2. A line from the sun to a given planet sweeps out equal areas in equal times.3. The periods of the planets are proportional to the powers of the major axis
lengths of their orbits.
Kepler did not know why the planets moved in this way. Three generations later,when Newton turned his attention to the motion of the planets, he discovered thateach of Kepler’s laws can be derived; they are consequences of Newton’s laws ofmotion and the law of gravitation. Let’s see how each of Kepler’s laws arises.
Kepler’s First LawFirst consider the elliptical orbits described in Kepler’s first law. Figure 13.18 showsthe geometry of an ellipse. The longest dimension is the major axis, with half-length a; this half-length is called the semi-major axis. The sum of the distancesfrom S to P and from to P is the same for all points on the curve. S and arethe foci (plural of focus). The sun is at S, and the planet is at P; we think of themboth as points because the size of each is very small in comparison to the distancebetween them. There is nothing at the other focus
The distance of each focus from the center of the ellipse is ea, where e is adimensionless number between 0 and 1 called the eccentricity. If theellipse is a circle. The actual orbits of the planets are fairly circular; their eccen-tricities range from 0.007 for Venus to 0.206 for Mercury. The earth’s orbit has
The point in the planet’s orbit closest to the sun is the perihelion,and the point most distant from the sun is the aphelion.
Newton was able to show that for a body acted on by an attractive force pro-portional to the only possible closed orbits are a circle or an ellipse; he alsoshowed that open orbits (trajectories 6 and 7 in Fig. 13.14) must be parabolas orhyperbolas. These results can be derived by a straightforward application ofNewton’s laws and the law of gravitation, together with a lot more differentialequations than we’re ready for.
Kepler’s Second LawFigure 13.19 shows Kepler’s second law. In a small time interval dt, the linefrom the sun S to the planet P turns through an angle The area swept out isthe colored triangle with height r, base length and area in Fig. 13.19b. The rate at which area is swept out, is called the sectorvelocity:
(13.14)
The essence of Kepler’s second law is that the sector velocity has the same valueat all points in the orbit. When the planet is close to the sun, r is small and is large; when the planet is far from the sun, r is large and is small.
To see how Kepler’s second law follows from Newton’s laws, we expressin terms of the velocity vector of the planet P. The component of per-
pendicular to the radial line is From Fig. 13.19b the displacementalong the direction of during time dt is so we also have Using this relationship in Eq. (13.14), we find
(13.15)dAdt
= 12 rv sinf (sector velocity)
v! = r du>dt.r du,v!
v! = v sinf.vSvSdA>dt
du>dtdu>dt
dAdt
= 12 r 2 du
dt
dA>dt,dA = 1
2 r 2 dur du,du.
1>r 2,
e = 0.017.2 1 e = 0,
S¿.
S¿S¿
32
The line SP sweeps out equalareas A in equal times.
(a)
(b)
(c)
v2S
A
dA 5 area swept out bythe line SP in a time dt
du r
S
P
f
vS r du
v' 5 v sin f
P
SP 5 line from sun(S) to planet (P)
S
vS
A
v1S
r
13.19 (a) The planet (P) moves aboutthe sun (S) in an elliptical orbit. (b) In atime dt the line SP sweeps out an area
(c) The planet’sspeed varies so that the line SP sweeps outthe same area A in a given time t regard-less of the planet’s position in its orbit.
dA = 121r du2r = 1
2 r 2 du.
Elipse
simulação
SP+S 'P= 2a = constante
Excentricidade: e = SP− S 'PSP+ S 'P
<1
Eixo maior:
Distância mínima ao Sol = a (1-e) : periélio
Distância máxima ao Sol = a (1+e) : afélio
2a
Aula anterior
13.5 Kepler’s Laws and the Motion of Planets 415
y
There is nothing atthe other focus.
The sun S is at onefocus of the ellipse.
A planet P follows an elliptical orbit.
AphelionPerihelion
Ox
P
ea ea
a a
S!S
13.18 Geometry of an ellipse. The sumof the distances SP and is the same forevery point on the curve. The sizes of thesun (S) and planet (P) are exaggerated forclarity.
S¿Pdiscovered three empirical laws that accurately described the motions of theplanets:
1. Each planet moves in an elliptical orbit, with the sun at one focus of theellipse.
2. A line from the sun to a given planet sweeps out equal areas in equal times.3. The periods of the planets are proportional to the powers of the major axis
lengths of their orbits.
Kepler did not know why the planets moved in this way. Three generations later,when Newton turned his attention to the motion of the planets, he discovered thateach of Kepler’s laws can be derived; they are consequences of Newton’s laws ofmotion and the law of gravitation. Let’s see how each of Kepler’s laws arises.
Kepler’s First LawFirst consider the elliptical orbits described in Kepler’s first law. Figure 13.18 showsthe geometry of an ellipse. The longest dimension is the major axis, with half-length a; this half-length is called the semi-major axis. The sum of the distancesfrom S to P and from to P is the same for all points on the curve. S and arethe foci (plural of focus). The sun is at S, and the planet is at P; we think of themboth as points because the size of each is very small in comparison to the distancebetween them. There is nothing at the other focus
The distance of each focus from the center of the ellipse is ea, where e is adimensionless number between 0 and 1 called the eccentricity. If theellipse is a circle. The actual orbits of the planets are fairly circular; their eccen-tricities range from 0.007 for Venus to 0.206 for Mercury. The earth’s orbit has
The point in the planet’s orbit closest to the sun is the perihelion,and the point most distant from the sun is the aphelion.
Newton was able to show that for a body acted on by an attractive force pro-portional to the only possible closed orbits are a circle or an ellipse; he alsoshowed that open orbits (trajectories 6 and 7 in Fig. 13.14) must be parabolas orhyperbolas. These results can be derived by a straightforward application ofNewton’s laws and the law of gravitation, together with a lot more differentialequations than we’re ready for.
Kepler’s Second LawFigure 13.19 shows Kepler’s second law. In a small time interval dt, the linefrom the sun S to the planet P turns through an angle The area swept out isthe colored triangle with height r, base length and area in Fig. 13.19b. The rate at which area is swept out, is called the sectorvelocity:
(13.14)
The essence of Kepler’s second law is that the sector velocity has the same valueat all points in the orbit. When the planet is close to the sun, r is small and is large; when the planet is far from the sun, r is large and is small.
To see how Kepler’s second law follows from Newton’s laws, we expressin terms of the velocity vector of the planet P. The component of per-
pendicular to the radial line is From Fig. 13.19b the displacementalong the direction of during time dt is so we also have Using this relationship in Eq. (13.14), we find
(13.15)dAdt
= 12 rv sinf (sector velocity)
v! = r du>dt.r du,v!
v! = v sinf.vSvSdA>dt
du>dtdu>dt
dAdt
= 12 r 2 du
dt
dA>dt,dA = 1
2 r 2 dur du,du.
1>r 2,
e = 0.017.2 1 e = 0,
S¿.
S¿S¿
32
The line SP sweeps out equalareas A in equal times.
(a)
(b)
(c)
v2S
A
dA 5 area swept out bythe line SP in a time dt
du r
S
P
f
vS r du
v' 5 v sin f
P
SP 5 line from sun(S) to planet (P)
S
vS
A
v1S
r
13.19 (a) The planet (P) moves aboutthe sun (S) in an elliptical orbit. (b) In atime dt the line SP sweeps out an area
(c) The planet’sspeed varies so that the line SP sweeps outthe same area A in a given time t regard-less of the planet’s position in its orbit.
dA = 121r du2r = 1
2 r 2 du.
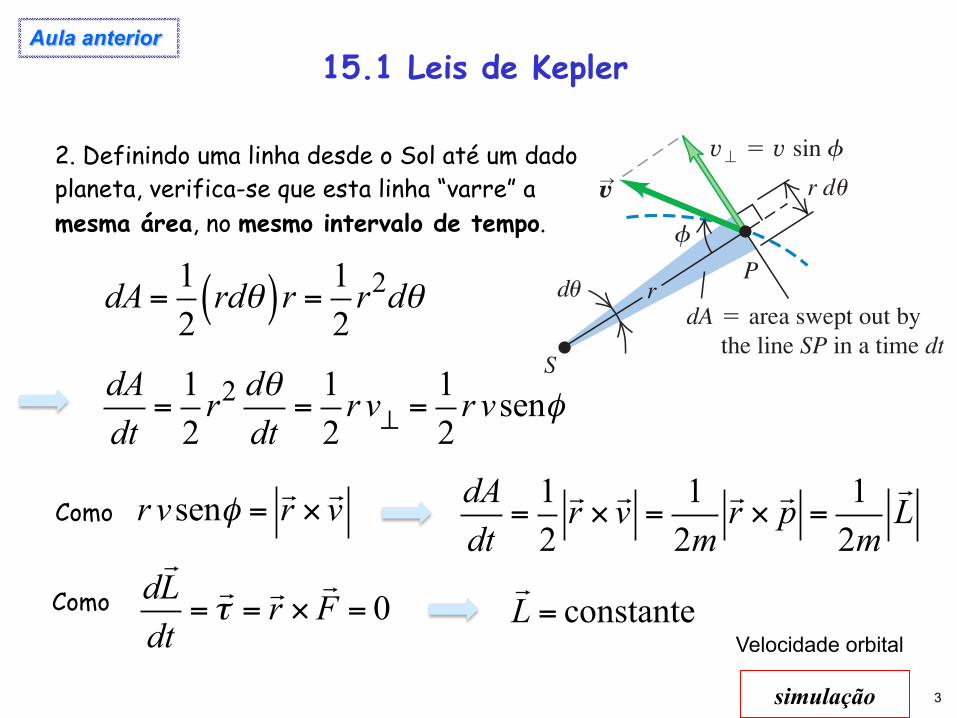
2. Definindo uma linha desde o Sol até um dado planeta, verifica-se que esta linha “varre” a mesma área, no mesmo intervalo de tempo.
3
15.1 Leis de Kepler
dA= 12rdθ( )r = 12 r
2dθ
dAdt
=12r2 dθdt
=12r v⊥ =
12r vsenφ
Como r vsenφ = !r × !v dAdt
=12!r × !v = 1
2m!r × !p = 1
2m!L
Como d!Ldt
=!τ =!r ×!F = 0
!L = constante
Velocidade orbital
simulação
Aula anterior
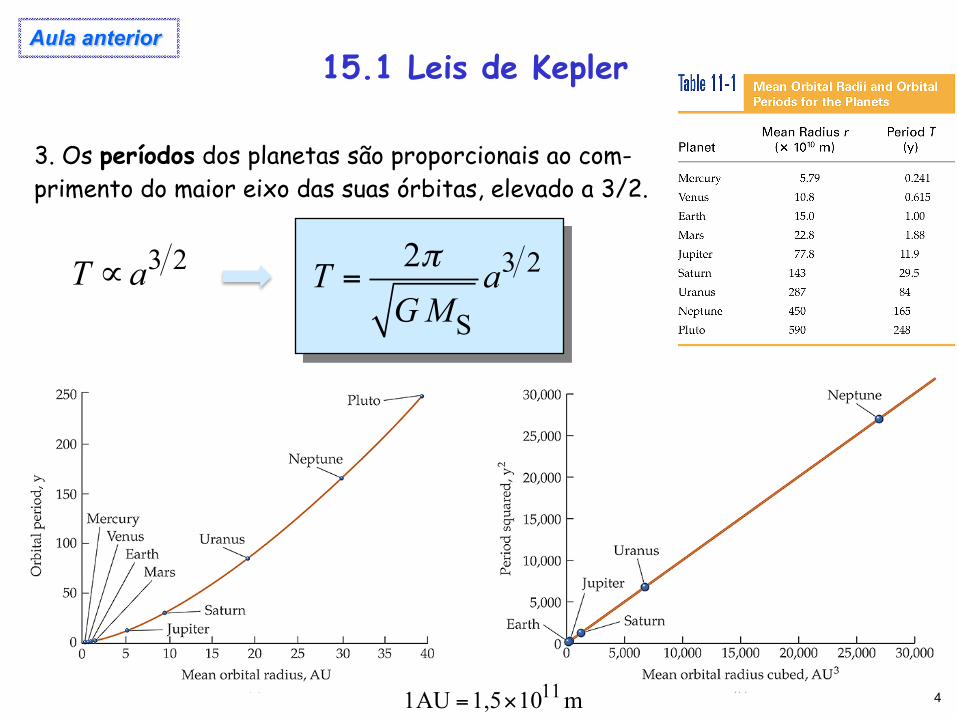
3. Os períodos dos planetas são proporcionais ao com-primento do maior eixo das suas órbitas, elevado a 3/2.
4
15.1 Leis de Kepler
1AU =1,5×1011m
T ∝a3 2 T = 2πGMS
a3 2
Aula anterior
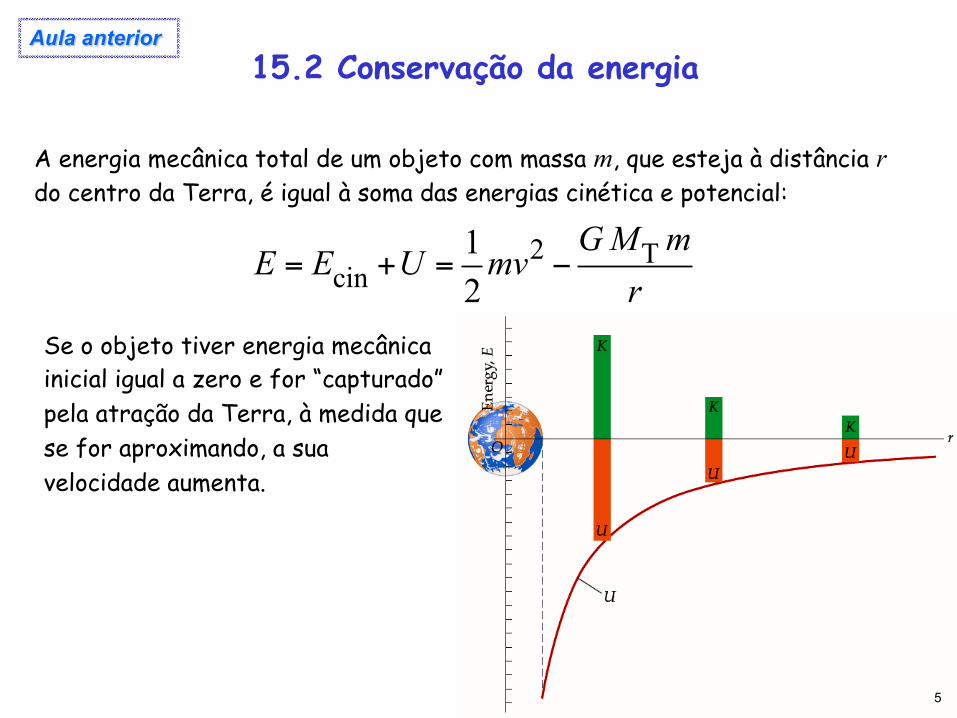
A energia mecânica total de um objeto com massa m, que esteja à distância r do centro da Terra, é igual à soma das energias cinética e potencial:
5
15.2 Conservação da energia
Se o objeto tiver energia mecânica inicial igual a zero e for “capturado” pela atração da Terra, à medida que se for aproximando, a sua velocidade aumenta.
E = Ecin +U =12mv2 −
GMTmr
Aula anterior
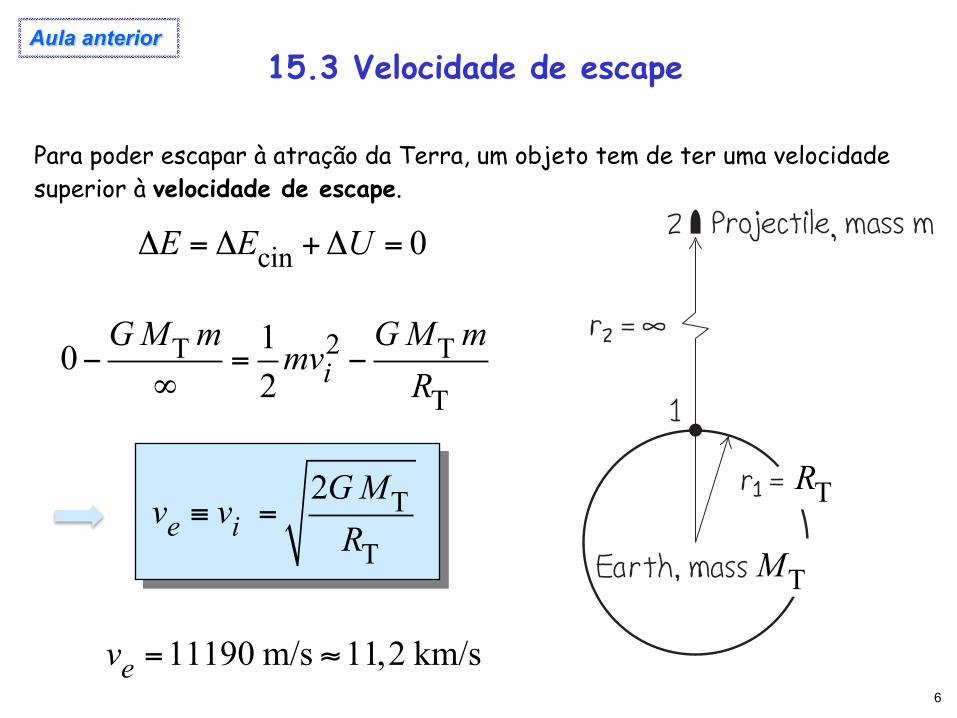
Para poder escapar à atração da Terra, um objeto tem de ter uma velocidade superior à velocidade de escape.
6
15.3 Velocidade de escape
ΔE = ΔEcin +ΔU = 0
0−GMTm
∞=12mvi2 −GMTmRT
ve ≡ vi =2GMTRT
ve =11190 m/s ≈11,2 km/s
Aula anterior
Figure 13.11 shows how the gravitational potential energy depends on the dis-tance r between the body of mass m and the center of the earth. When the bodymoves away from the earth, r increases, the gravitational force does negativework, and U increases (i.e., becomes less negative). When the body “falls”toward earth, r decreases, the gravitational work is positive, and the potentialenergy decreases (i.e., becomes more negative).
You may be troubled by Eq. (13.9) because it states that gravitational potentialenergy is always negative. But in fact you’ve seen negative values of U before. Inusing the formula in Section 7.1, we found that U was negative when-ever the body of mass m was at a value of y below the arbitrary height we choseto be —that is, whenever the body and the earth were closer together thansome certain arbitrary distance. (See, for instance, Example 7.2 in Section 7.1.)In defining U by Eq. (13.9), we have chosen U to be zero when the body of massm is infinitely far from the earth As the body moves toward the earth,gravitational potential energy decreases and so becomes negative.
If we wanted, we could make at the surface of the earth, whereby simply adding the quantity to Eq. (13.9). This would
make U positive when We won’t do this for two reasons: One, it wouldmake the expression for U more complicated; and two, the added term would notaffect the difference in potential energy between any two points, which is theonly physically significant quantity.
CAUTION Gravitational force vs. gravitational potential energy Be careful not to confusethe expressions for gravitational force, Eq. (13.7), and gravitational potential energy,Eq. (13.9). The force is proportional to while potential energy U is proportionalto ❙
Armed with Eq. (13.9), we can now use general energy relationships for prob-lems in which the behavior of the earth’s gravitational force has to beincluded. If the gravitational force on the body is the only force that does work,the total mechanical energy of the system is constant, or conserved. In the follow-ing example we’ll use this principle to calculate escape speed, the speed requiredfor a body to escape completely from a planet.
1>r 2
1>r.1>r 2,Fr
r 7 RE.GmEm>REr = RE,
U = 0
1r = q2.y = 0
U = mgy
410 CHAPTER 13 Gravitation
RE
r
U
O
GmEmRE
2
U is always negative, but it becomes less negative with increasingradial distance r.
Earth, mass mE
Astronaut, mass m
Gravitational potential
energy U 5 2for the system of theearth and the astronaut.
GmEmr
13.11 A graph of the gravitationalpotential energy U for the system of theearth (mass and an astronaut (mass m)versus the astronaut’s distance r from thecenter of the earth.
mE)
Example 13.5 “From the earth to the moon”
In Jules Verne’s 1865 story with this title, three men went to themoon in a shell fired from a giant cannon sunk in the earth inFlorida. (a) Find the minimum muzzle speed needed to shoot ashell straight up to a height above the earth equal to the earth’sradius . (b) Find the minimum muzzle speed that would allow ashell to escape from the earth completely (the escape speed).Neglect air resistance, the earth’s rotation, and the gravitationalpull of the moon. The earth’s radius and mass are
and .
SOLUTION
IDENTIFY and SET UP: Once the shell leaves the cannon muzzle,only the (conservative) gravitational force does work. Hence wecan use conservation of mechanical energy to find the speed atwhich the shell must leave the muzzle so as to come to a halt(a) at two earth radii from the earth’s center and (b) at an infinitedistance from earth. The energy-conservation equation is
with U given by Eq. (13.9).Figure 13.12 shows our sketches. Point 1 is at , where
the shell leaves the cannon with speed (the target variable).Point 2 is where the shell reaches its maximum height; in part
v1
r1 = RE
K1 + U1 = K2 + U2,
mE = 5.97 * 1024 kg6.38 * 106 mRE =
RE
(a) (Fig. 13.12a), and in part (b) (Fig 13.12b).In both cases and Let m be the mass of the shell(with passengers).
K2 = 0.v2 = 0r2 = qr2 = 2RE
(a) (b)
13.12 Our sketches for this problem.
MT
RT
launch point is high enough that he clears the mountaintops, he may be able to goright on around the earth without ever landing.
Figure 13.14 shows a variation on this theme. We launch a projectile frompoint A in the direction AB, tangent to the earth’s surface. Trajectories 1 through 7show the effect of increasing the initial speed. In trajectories 3 through 5 the pro-jectile misses the earth and becomes a satellite. If there is no retarding force, theprojectile’s speed when it returns to point A is the same as its initial speed and itrepeats its motion indefinitely.
Trajectories 1 through 5 close on themselves and are called closed orbits. Allclosed orbits are ellipses or segments of ellipses; trajectory 4 is a circle, a specialcase of an ellipse. (We’ll discuss the properties of an ellipse in Section 13.5.) Tra-jectories 6 and 7 are open orbits. For these paths the projectile never returns toits starting point but travels ever farther away from the earth.
Satellites: Circular OrbitsA circular orbit, like trajectory 4 in Fig. 13.14, is the simplest case. It is also animportant case, since many artificial satellites have nearly circular orbits and theorbits of the planets around the sun are also fairly circular. The only force acting ona satellite in circular orbit around the earth is the earth’s gravitational attraction,which is directed toward the center of the earth and hence toward the center of theorbit (Fig. 13.15). As we discussed in Section 5.4, this means that the satellite is inuniform circular motion and its speed is constant. The satellite isn’t falling towardthe earth; rather, it’s constantly falling around the earth. In a circular orbit the speedis just right to keep the distance from the satellite to the center of the earth constant.
Let’s see how to find the constant speed of a satellite in a circular orbit.The radius of the orbit is r, measured from the center of the earth; the acceler-ation of the satellite has magnitude and is always directed toward thecenter of the circle. By the law of gravitation, the net force (gravitational force) onthe satellite of mass m has magnitude and is in the same directionas the acceleration. Newton’s second law then tells us that
Solving this for we find
(13.10)
This relationship shows that we can’t choose the orbit radius r and the speed independently; for a given radius r, the speed for a circular orbit is determined.v
v
v = BGmE
r (circular orbit)
v,
GmEm
r 2 = mv2
r
1gFS
! maS2Fg = GmEm>r 2
arad = v2>rv
412 CHAPTER 13 Gravitation
132
4
6
7
A projectile is launchedfrom A toward B.Trajectories through show the effect ofincreasing initial speed.
17
5
BA
CRE
r
13.14 Trajectories of a projectilelaunched from a great height (ignoring airresistance). Orbits 1 and 2 would be com-pleted as shown if the earth were a pointmass at C. (This illustration is based onone in Isaac Newton’s Principia.)
FgS
aS
vS
The satellite is in a circular orbit: Itsacceleration a is always perpendicular to its velocity v, so its speed v is constant.
S
S
FgS
aS
vS
FgS
aSvS
RE
r
13.15 The force due to the earth’sgravitational attraction provides the cen-tripetal acceleration that keeps a satellite inorbit. Compare to Fig. 5.28.
FS
g
?
PhET: My Solar SystemActivPhysics 4.6: Satellites Orbit
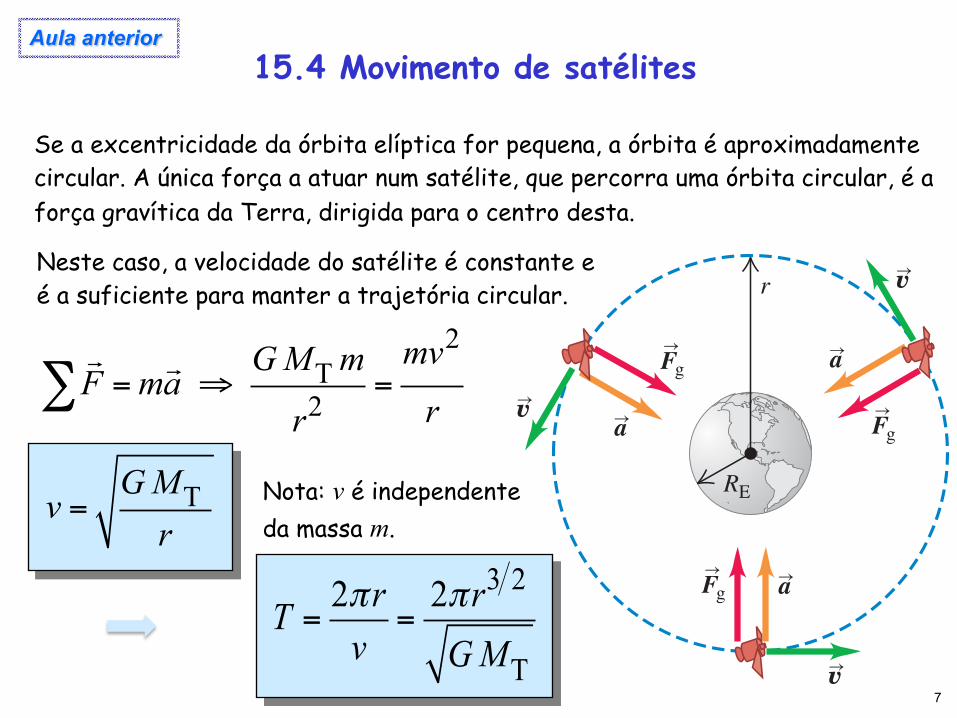
Se a excentricidade da órbita elíptica for pequena, a órbita é aproximadamente circular. A única força a atuar num satélite, que percorra uma órbita circular, é a força gravítica da Terra, dirigida para o centro desta.
7
15.4 Movimento de satélites
Neste caso, a velocidade do satélite é constante e é a suficiente para manter a trajetória circular.
!F∑ =m!a ⇒
GMTm
r2=mv2
r
v =GMTr
T = 2πrv
=2πr3 2
GMT
Nota: v é independente da massa m.
Aula anterior
Aula anterior
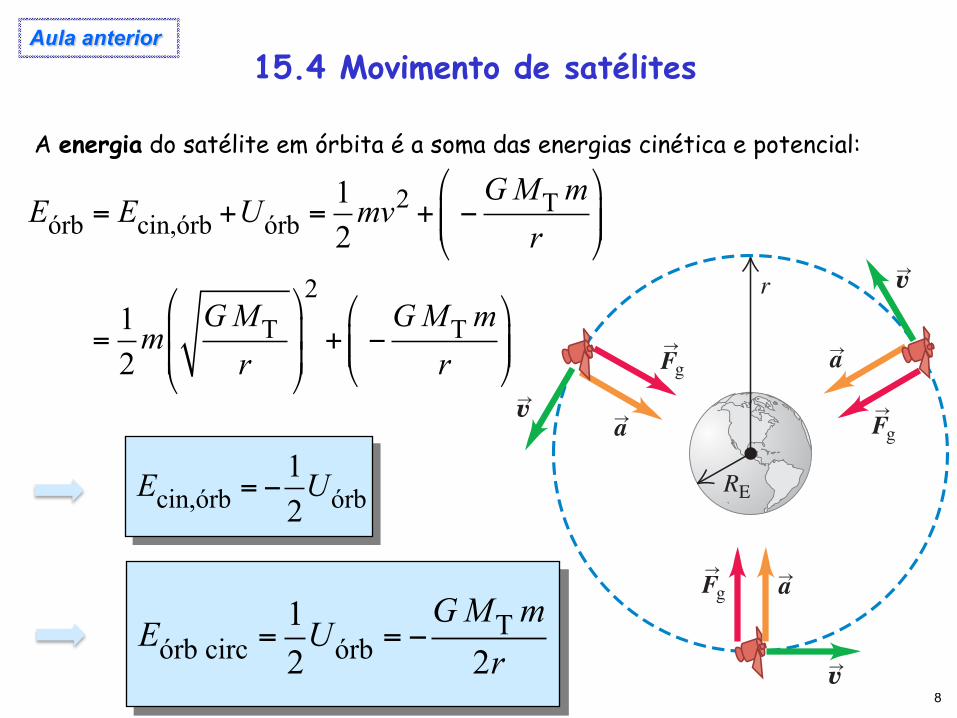
A energia do satélite em órbita é a soma das energias cinética e potencial:
8
launch point is high enough that he clears the mountaintops, he may be able to goright on around the earth without ever landing.
Figure 13.14 shows a variation on this theme. We launch a projectile frompoint A in the direction AB, tangent to the earth’s surface. Trajectories 1 through 7show the effect of increasing the initial speed. In trajectories 3 through 5 the pro-jectile misses the earth and becomes a satellite. If there is no retarding force, theprojectile’s speed when it returns to point A is the same as its initial speed and itrepeats its motion indefinitely.
Trajectories 1 through 5 close on themselves and are called closed orbits. Allclosed orbits are ellipses or segments of ellipses; trajectory 4 is a circle, a specialcase of an ellipse. (We’ll discuss the properties of an ellipse in Section 13.5.) Tra-jectories 6 and 7 are open orbits. For these paths the projectile never returns toits starting point but travels ever farther away from the earth.
Satellites: Circular OrbitsA circular orbit, like trajectory 4 in Fig. 13.14, is the simplest case. It is also animportant case, since many artificial satellites have nearly circular orbits and theorbits of the planets around the sun are also fairly circular. The only force acting ona satellite in circular orbit around the earth is the earth’s gravitational attraction,which is directed toward the center of the earth and hence toward the center of theorbit (Fig. 13.15). As we discussed in Section 5.4, this means that the satellite is inuniform circular motion and its speed is constant. The satellite isn’t falling towardthe earth; rather, it’s constantly falling around the earth. In a circular orbit the speedis just right to keep the distance from the satellite to the center of the earth constant.
Let’s see how to find the constant speed of a satellite in a circular orbit.The radius of the orbit is r, measured from the center of the earth; the acceler-ation of the satellite has magnitude and is always directed toward thecenter of the circle. By the law of gravitation, the net force (gravitational force) onthe satellite of mass m has magnitude and is in the same directionas the acceleration. Newton’s second law then tells us that
Solving this for we find
(13.10)
This relationship shows that we can’t choose the orbit radius r and the speed independently; for a given radius r, the speed for a circular orbit is determined.v
v
v = BGmE
r (circular orbit)
v,
GmEm
r 2 = mv2
r
1gFS
! maS2Fg = GmEm>r 2
arad = v2>rv
412 CHAPTER 13 Gravitation
132
4
6
7
A projectile is launchedfrom A toward B.Trajectories through show the effect ofincreasing initial speed.
17
5
BA
CRE
r
13.14 Trajectories of a projectilelaunched from a great height (ignoring airresistance). Orbits 1 and 2 would be com-pleted as shown if the earth were a pointmass at C. (This illustration is based onone in Isaac Newton’s Principia.)
FgS
aS
vS
The satellite is in a circular orbit: Itsacceleration a is always perpendicular to its velocity v, so its speed v is constant.
S
S
FgS
aS
vS
FgS
aSvS
RE
r
13.15 The force due to the earth’sgravitational attraction provides the cen-tripetal acceleration that keeps a satellite inorbit. Compare to Fig. 5.28.
FS
g
?
PhET: My Solar SystemActivPhysics 4.6: Satellites Orbit
Eórb = Ecin,órb +Uórb =12mv2 + −
GMTmr
⎛
⎝⎜⎜
⎞
⎠⎟⎟
=12m
GMTr
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟
2
+ −GMTmr
⎛
⎝⎜⎜
⎞
⎠⎟⎟
Ecin,órb = −12Uórb
Eórb circ =12Uórb = −
GMTm2r
15.4 Movimento de satélites
It’s simplest to define our coordinate system so that the origin O is at the equilib-rium position, where the spring is neither stretched nor compressed. Then x is thex-component of the displacement of the body from equilibrium and is also thechange in the length of the spring. The x-component of the force that the springexerts on the body is and the x-component of acceleration is given by
Figure 14.2 shows the body for three different displacements of the spring.Whenever the body is displaced from its equilibrium position, the spring forcetends to restore it to the equilibrium position. We call a force with this character arestoring force. Oscillation can occur only when there is a restoring force tend-ing to return the system to equilibrium.
Let’s analyze how oscillation occurs in this system. If we displace the body to theright to and then let go, the net force and the acceleration are to the left (Fig. 14.2a). The speed increases as the body approaches the equilibrium position O.When the body is at O, the net force acting on it is zero (Fig. 14.2b), but because ofits motion it overshoots the equilibrium position. On the other side of the equilib-rium position the body is still moving to the left, but the net force and the accelera-tion are to the right (Fig. 14.2c); hence the speed decreases until the body comes to astop. We will show later that with an ideal spring, the stopping point is at The body then accelerates to the right, overshoots equilibrium again, and stops atthe starting point ready to repeat the whole process. The body is oscillating!If there is no friction or other force to remove mechanical energy from the system,this motion repeats forever; the restoring force perpetually draws the body backtoward the equilibrium position, only to have the body overshoot time after time.
In different situations the force may depend on the displacement x from equi-librium in different ways. But oscillation always occurs if the force is a restoringforce that tends to return the system to equilibrium.
Amplitude, Period, Frequency, and Angular FrequencyHere are some terms that we’ll use in discussing periodic motions of all kinds:
The amplitude of the motion, denoted by A, is the maximum magnitude ofdisplacement from equilibrium—that is, the maximum value of It is alwayspositive. If the spring in Fig. 14.2 is an ideal one, the total overall range of themotion is 2A. The SI unit of A is the meter. A complete vibration, or cycle, is onecomplete round trip—say, from A to and back to A, or from O to A, backthrough O to and back to O. Note that motion from one side to the other (say, to A) is a half-cycle, not a whole cycle.
The period, T, is the time for one cycle. It is always positive. The SI unit is thesecond, but it is sometimes expressed as “seconds per cycle.”
The frequency, is the number of cycles in a unit of time. It is always posi-tive. The SI unit of frequency is the hertz:
This unit is named in honor of the German physicist Heinrich Hertz(1857–1894), a pioneer in investigating electromagnetic waves.
The angular frequency, is times the frequency:
We’ll learn shortly why is a useful quantity. It represents the rate of change ofan angular quantity (not necessarily related to a rotational motion) that is alwaysmeasured in radians, so its units are Since is in we may regardthe number as having units
From the definitions of period T and frequency we see that each is the recip-rocal of the other:
(14.1)f = 1T T = 1
ƒ (relationships between frequency and period)
ƒrad>cycle.2p
cycle>s,ƒrad>s.
v
v = 2pƒ
2pv,
1 hertz = 1 Hz = 1 cycle>s = 1 s-1
ƒ,
-A-A,
-A
ƒx ƒ .
x = A,
x = -A.
x = A
ax = Fx>m.axFx,
438 CHAPTER 14 Periodic Motion
x , 0: glider displacedto the left from theequilibrium position.
Fx . 0, so ax . 0:compressed springpushes glider towardequilibrium position.
Fx
ax
Fx
x 5 0: The relaxed spring exerts no force on theglider, so the glider has zero acceleration.
(b)
O x
y
xn
mg
y
(a)
xx
y
xn
mg
y
x . 0: glider displacedto the right from theequilibrium position.
Fx , 0, so ax , 0:stretched springpulls glider towardequilibrium position.
Fx
ax
Fx
(c)
xx
y
x
n
mg
y
14.2 Model for periodic motion. Whenthe body is displaced from its equilibriumposition at the spring exerts arestoring force back toward the equilib-rium position.
x = 0,
Application Wing FrequenciesThe ruby-throated hummingbird (Archilochuscolubris) normally flaps its wings at about 50 Hz, producing the characteristic sound thatgives hummingbirds their name. Insects canflap their wings at even faster rates, from 330 Hz for a house fly and 600 Hz for a mos-quito to an amazing 1040 Hz for the tiny bitingmidge.
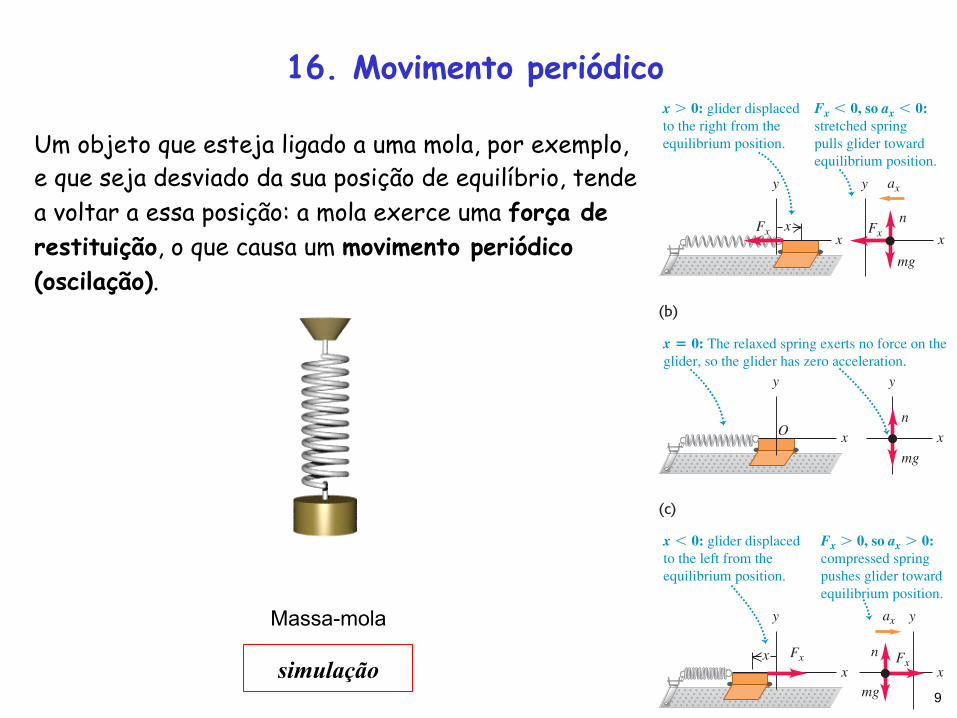
Um objeto que esteja ligado a uma mola, por exemplo, e que seja desviado da sua posição de equilíbrio, tende a voltar a essa posição: a mola exerce uma força de restituição, o que causa um movimento periódico (oscilação).
9
16. Movimento periódico
Massa-mola
simulação
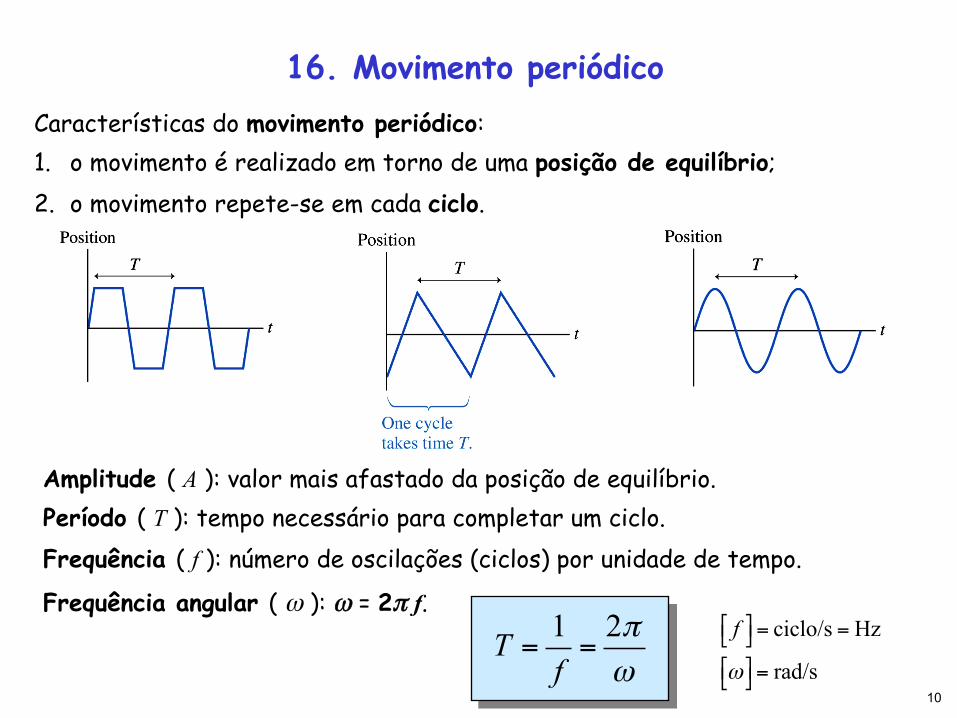
Características do movimento periódico: 1. o movimento é realizado em torno de uma posição de equilíbrio; 2. o movimento repete-se em cada ciclo.
10
Amplitude ( A ): valor mais afastado da posição de equilíbrio. Período ( T ): tempo necessário para completar um ciclo. Frequência ( f ): número de oscilações (ciclos) por unidade de tempo.
Frequência angular ( ω ): ω = 2π f.
T = 1f=2πω
f⎡⎣ ⎤⎦= ciclo/s = Hz
ω⎡⎣ ⎤⎦= rad/s
16. Movimento periódico
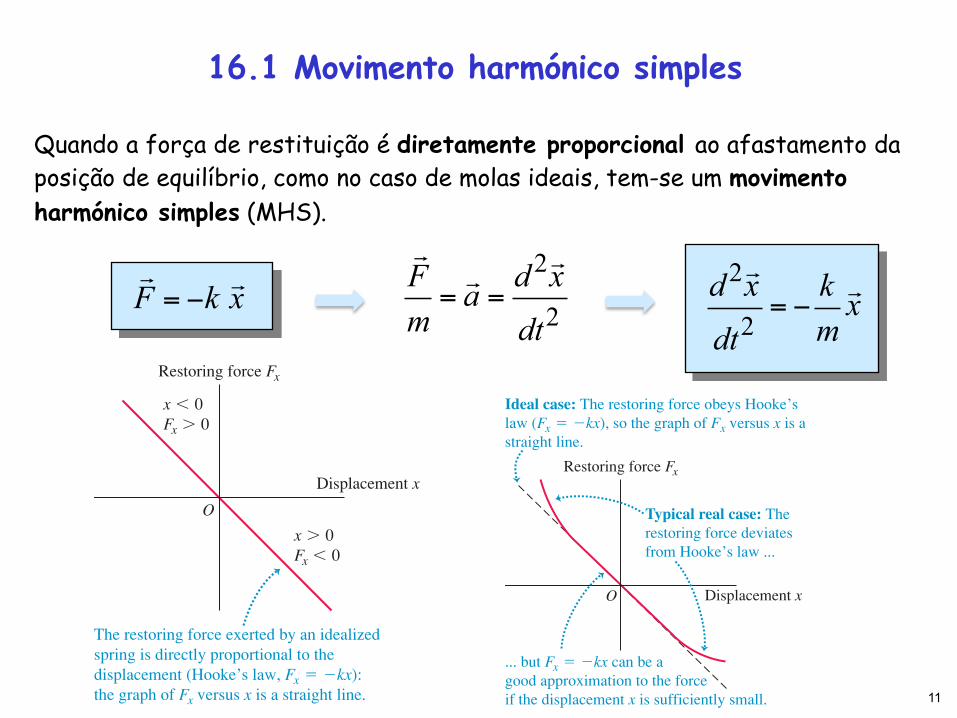
Quando a força de restituição é diretamente proporcional ao afastamento da posição de equilíbrio, como no caso de molas ideais, tem-se um movimento harmónico simples (MHS).
11
!F = −k
!x
16.1 Movimento harmónico simples
!Fm=!a = d
2 !x
dt2d2!x
dt2= −km!x
14.2 Simple Harmonic Motion 439
Also, from the definition of
(14.2)v = 2pƒ = 2pT (angular frequency)
v,
Example 14.1 Period, frequency, and angular frequency
An ultrasonic transducer used for medical diagnosis oscillates atHow long does each oscillation take,
and what is the angular frequency?
SOLUTION
IDENTIFY and SET UP: The target variables are the period T andthe angular frequency . We can find these using the given fre-quency ƒ in Eqs. (14.1) and (14.2).
v
6.7 MHz = 6.7 * 106 Hz.EXECUTE: From Eqs. (14.1) and (14.2),
EVALUATE: This is a very rapid vibration, with large and andsmall T. A slow vibration has small and and large T.vƒ
vƒ
= 4.2 * 107 rad>s= 12p rad>cycle216.7 * 106 cycle>s2v = 2pf = 2p16.7 * 106 Hz2T = 1ƒ
= 1
6.7 * 106 Hz= 1.5 * 10-7 s = 0.15 ms
Test Your Understanding of Section 14.1 A body like that shown inFig. 14.2 oscillates back and forth. For each of the following values of the body’sx-velocity and x-acceleration state whether its displacement x is positive,negative, or zero. (a) and (b) and (c) and (d) and (e) and (f) and ❙ax = 0.vx 7 0ax 6 0;vx = 0ax 6 0;vx 6 0
ax 7 0;vx 6 0ax 6 0;vx 7 0ax 7 0;vx 7 0ax,vx
14.2 Simple Harmonic MotionThe simplest kind of oscillation occurs when the restoring force is directlyproportional to the displacement from equilibrium x. This happens if the springin Figs. 14.1 and 14.2 is an ideal one that obeys Hooke’s law. The constant ofproportionality between and x is the force constant k. (You may want toreview Hooke’s law and the definition of the force constant in Section 6.3.) Oneither side of the equilibrium position, and x always have opposite signs. InSection 6.3 we represented the force acting on a stretched ideal spring as
The x-component of force the spring exerts on the body is the negativeof this, so the x-component of force on the body is
(14.3)
This equation gives the correct magnitude and sign of the force, whether x is pos-itive, negative, or zero (Fig. 14.3). The force constant k is always positive and hasunits of (a useful alternative set of units is We are assuming thatthere is no friction, so Eq. (14.3) gives the net force on the body.
When the restoring force is directly proportional to the displacement fromequilibrium, as given by Eq. (14.3), the oscillation is called simple harmonicmotion, abbreviated SHM. The acceleration of a body inSHM is given by
(14.4)
The minus sign means the acceleration and displacement always have oppositesigns. This acceleration is not constant, so don’t even think of using the constant-acceleration equations from Chapter 2. We’ll see shortly how to solve this equa-tion to find the displacement x as a function of time. A body that undergoessimple harmonic motion is called a harmonic oscillator.
ax = d2x
dt 2 = - km
x (simple harmonic motion)
ax = d2x>dt 2 = Fx>mkg>s2).N>m
Fx = -kx (restoring force exerted by an ideal spring)
Fx
Fx = kx.
Fx
Fx
Fx
The restoring force exerted by an idealizedspring is directly proportional to thedisplacement (Hooke’s law, Fx 5 2kx):the graph of Fx versus x is a straight line.
O
Displacement x
Restoring force Fx
x , 0Fx . 0
x . 0Fx , 0
14.3 An idealized spring exerts arestoring force that obeys Hooke’s law,
Oscillation with such a restoringforce is called simple harmonic motion.Fx = -kx.
Why is simple harmonic motion important? Keep in mind that not all periodicmotions are simple harmonic; in periodic motion in general, the restoring forcedepends on displacement in a more complicated way than in Eq. (14.3). But inmany systems the restoring force is approximately proportional to displacementif the displacement is sufficiently small (Fig. 14.4). That is, if the amplitude issmall enough, the oscillations of such systems are approximately simple har-monic and therefore approximately described by Eq. (14.4). Thus we can useSHM as an approximate model for many different periodic motions, such as thevibration of the quartz crystal in a watch, the motion of a tuning fork, the electriccurrent in an alternating-current circuit, and the oscillations of atoms in mole-cules and solids.
Circular Motion and the Equations of SHMTo explore the properties of simple harmonic motion, we must express the dis-placement x of the oscillating body as a function of time, The second deriv-ative of this function, must be equal to times the function itself,as required by Eq. (14.4). As we mentioned, the formulas for constant accelera-tion from Section 2.4 are no help because the acceleration changes constantly asthe displacement x changes. Instead, we’ll find by noticing a striking similar-ity between SHM and another form of motion that we’ve already studied.
Figure 14.5a shows a top view of a horizontal disk of radius A with a ballattached to its rim at point Q. The disk rotates with constant angular speed (measured in so the ball moves in uniform circular motion. A horizontallight beam shines on the rotating disk and casts a shadow of the ball on a screen.The shadow at point P oscillates back and forth as the ball moves in a circle. Wethen arrange a body attached to an ideal spring, like the combination shown inFigs. 14.1 and 14.2, so that the body oscillates parallel to the shadow. We willprove that the motion of the body and the motion of the ball’s shadow areidentical if the amplitude of the body’s oscillation is equal to the disk radius A,and if the angular frequency of the oscillating body is equal to the angularspeed of the rotating disk. That is, simple harmonic motion is the projection ofuniform circular motion onto a diameter.
We can verify this remarkable statement by finding the acceleration of theshadow at P and comparing it to the acceleration of a body undergoing SHM,given by Eq. (14.4). The circle in which the ball moves so that its projectionmatches the motion of the oscillating body is called the reference circle; wewill call the point Q the reference point. We take the reference circle to lie in the
v2pƒ
rad>s),v
x1t21-k>m2d2x>dt 2,
x1t2.
440 CHAPTER 14 Periodic Motion
... but Fx 5 2kx can be agood approximation to the forceif the displacement x is sufficiently small.
Ideal case: The restoring force obeys Hooke’slaw (Fx 5 2kx), so the graph of Fx versus x is astraight line.
Typical real case: Therestoring force deviatesfrom Hooke’s law ...
O Displacement x
Restoring force Fx
14.4 In most real oscillations Hooke’slaw applies provided the body doesn’tmove too far from equilibrium. In such acase small-amplitude oscillations areapproximately simple harmonic.
u
Shadow of ballon screen
Ball’s shadow
Ball on rotatingturntable
While the ball Qon the turntablemoves in uniformcircular motion,its shadow P movesback and forth onthe screen in simpleharmonic motion.
Illuminatedvertical screen
Illumination
Table
Light beam
A
A
2A O P
Q
Ball moves in uniformcircular motion.
Shadow movesback and forth onx-axis in SHM.
(a) Apparatus for creating the reference circle (b) An abstract representation of the motion in (a)
OP
A
y
x
Q
x !A cos uv
14.5 (a) Relating uniform circular motion and simple harmonic motion. (b) The ball’s shadow moves exactly like a body oscillatingon an ideal spring.
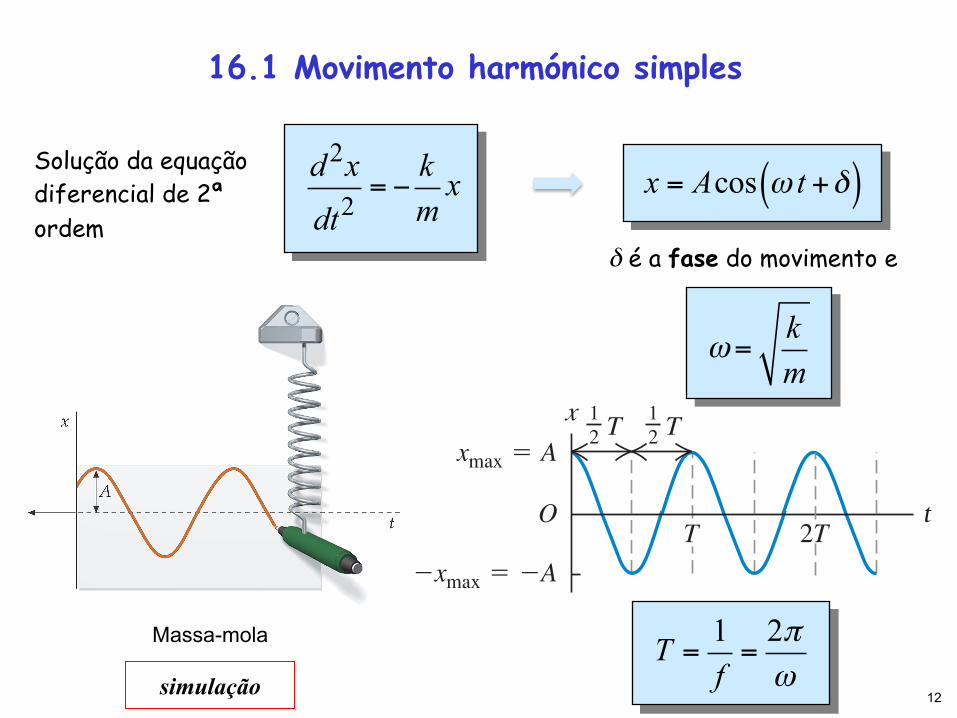
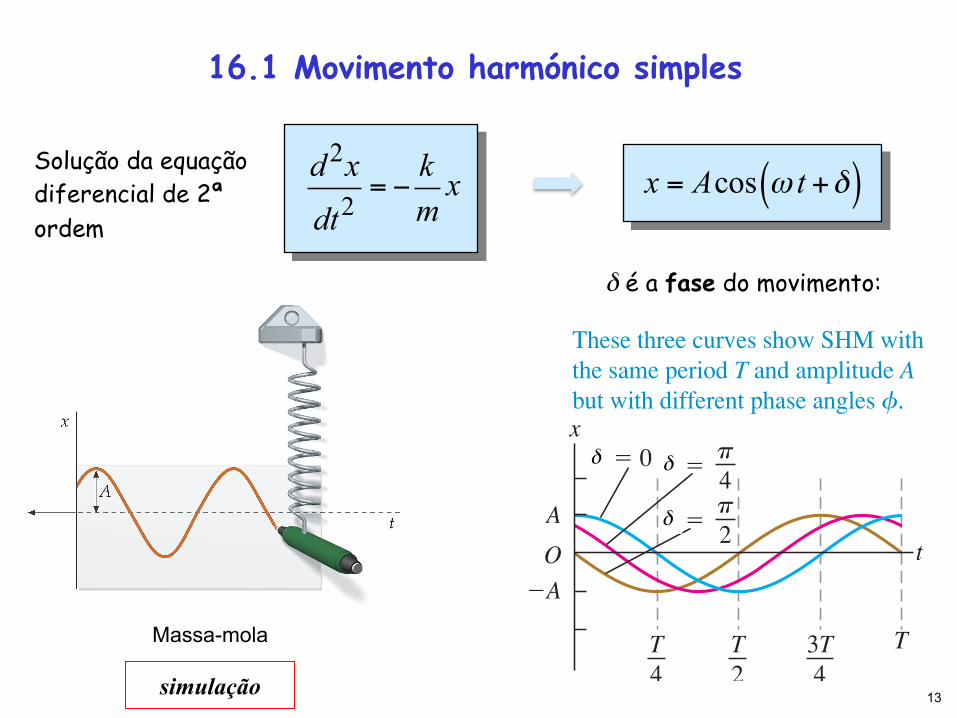
Solução da equação diferencial de 2ª ordem
12
x = Acos ω t +δ( )d2x
dt2= −kmx
Massa-mola
simulação
δ é a fase do movimento e
14.2 Simple Harmonic Motion 443
Displacement, Velocity, and Acceleration in SHMWe still need to find the displacement x as a function of time for a harmonic oscil-lator. Equation (14.4) for a body in simple harmonic motion along the x-axisis identical to Eq. (14.8) for the x-coordinate of the reference point in uniformcircular motion with constant angular speed Hence Eq. (14.5),
describes the x-coordinate for both of these situations. If at the phasor OQ makes an angle (the Greek letter phi) with the positive x-axis,then at any later time t this angle is We substitute this into Eq. (14.5)to obtain
(14.13)
where Figure 14.9 shows a graph of Eq. (14.13) for the particularcase The displacement x is a periodic function of time, as expected forSHM. We could also have written Eq. (14.13) in terms of a sine function ratherthan a cosine by using the identity In simple harmonicmotion the position is a periodic, sinusoidal function of time. There are manyother periodic functions, but none so simple as a sine or cosine function.
The value of the cosine function is always between and 1, so in Eq. (14.13),x is always between and A. This confirms that A is the amplitude of the motion.
The period T is the time for one complete cycle of oscillation, as Fig. 14.9shows. The cosine function repeats itself whenever the quantity in parentheses inEq. (14.13) increases by radians. Thus, if we start at time the time T tocomplete one cycle is given by
which is just Eq. (14.12). Changing either m or k changes the period of oscilla-tion, as shown in Figs. 14.10a and 14.10b. The period does not depend on theamplitude A (Fig. 14.10c).
vT = A km
T = 2p or T = 2pAmk
t = 0,2p
-A-1
cos a = sin1a + p>22.f = 0.v = 2k>m .
x = Acos1vt + f2 (displacement in SHM)
u = vt + f.f
t = 0x = A cos u,v = 2k>m .
EXECUTE: (a) When the force the spring exerts onthe spring balance is From Eq. (14.3),
(b) From Eq. (14.10), with ,
T = 1ƒ
= 13.2 cycle>s = 0.31 s
ƒ = v
2p=
20 rad>s2p rad>cycle
= 3.2 cycle>s = 3.2 Hz
v = A km
= B200 kg>s2
0.50 kg= 20 rad>sm = 0.50 kg
k = -Fx
x= - -6.0 N
0.030 m= 200 N>m = 200 kg>s2
Fx = -6.0 N.x = 0.030 m, EVALUATE: The amplitude of the oscillation is 0.020 m, the dis-
tance that we pulled the glider before releasing it. In SHM theangular frequency, frequency, and period are all independent of theamplitude. Note that a period is usually stated in “seconds” ratherthan “seconds per cycle.”
12
x
2TtO
xmax 5 A
T
T 12 T
2xmax 5 2A
14.9 Graph of x versus t [see Eq. (14.13)]for simple harmonic motion. The caseshown has f = 0.
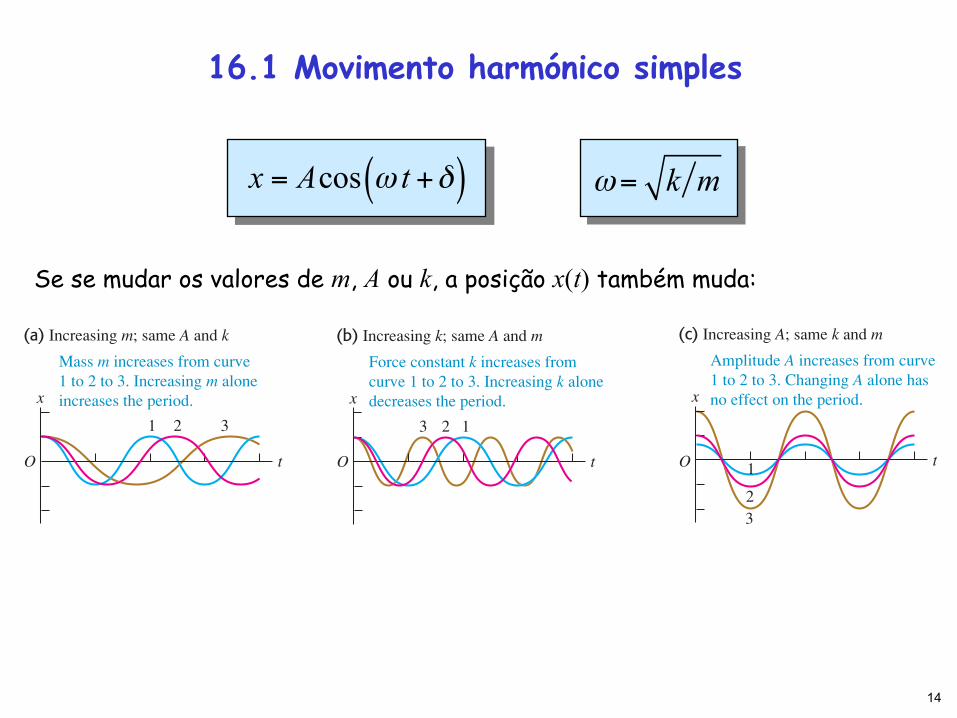
(a) Increasing m; same A and k
O t
x
1 2 3
Mass m increases from curve1 to 2 to 3. Increasing m aloneincreases the period.
14.10 Variations of simple harmonic motion. All cases shown have [see Eq. (14.13)].f = 0
(b) Increasing k; same A and m
tO
x
3 2 1
Force constant k increases fromcurve 1 to 2 to 3. Increasing k alonedecreases the period.
(c) Increasing A; same k and m
O t
x
32
1
Amplitude A increases from curve1 to 2 to 3. Changing A alone hasno effect on the period.
PhET: Motion in 2DActivPhysics 9.1: Position Graphs andEquationsActivPhysics 9.2: Describing VibrationalMotionActivPhysics 9.5: Age Drops Tarzan
ω=km
T = 1f=2πω
16.1 Movimento harmónico simples
13
x = Acos ω t +δ( )
16.1 Movimento harmónico simples
Massa-mola
simulação
δ é a fase do movimento:
The constant in Eq. (14.13) is called the phase angle. It tells us at whatpoint in the cycle the motion was at (equivalent to where around the circlethe point Q was at We denote the position at by Putting and in Eq. (14.13), we get
(14.14)
If then and the body starts at its maximum positivedisplacement. If then and the particle starts at itsmaximum negative displacement. If then andthe particle is initially at the origin. Figure 14.11 shows the displacement x versustime for three different phase angles.
We find the velocity and acceleration as functions of time for a harmonicoscillator by taking derivatives of Eq. (14.13) with respect to time:
(14.15)
(14.16)
The velocity oscillates between and and theacceleration oscillates between and (Fig. 14.12).Comparing Eq. (14.16) with Eq. (14.13) and recalling that from Eq. (14.9), we see that
which is just Eq. (14.4) for simple harmonic motion. This confirms that Eq. (14.13) for x as a function of time is correct.
We actually derived Eq. (14.16) earlier in a geometrical way by taking thex-component of the acceleration vector of the reference point Q. This wasdone in Fig. 14.6b and Eq. (14.7) (recall that In the same way,we could have derived Eq. (14.15) by taking the x-component of the velocityvector of Q, as shown in Fig. 14.6b. We’ll leave the details for you to work out.
Note that the sinusoidal graph of displacement versus time (Fig. 14.12a) isshifted by one-quarter period from the graph of velocity versus time (Fig. 14.12b)and by one-half period from the graph of acceleration versus time (Fig. 14.12c).Figure 14.13 shows why this is so. When the body is passing through the equilib-rium position so that the displacement is zero, the velocity equals either or
(depending on which way the body is moving) and the acceleration iszero. When the body is at either its maximum positive displacement, orits maximum negative displacement, the velocity is zero and the body isinstantaneously at rest. At these points, the restoring force and theacceleration of the body have their maximum magnitudes. At the accel-eration is negative and equal to At the acceleration is positive:
If we are given the initial position and initial velocity for the oscillatingbody, we can determine the amplitude A and the phase angle Here’s how to doit. The initial velocity is the velocity at time putting and
in Eq. (14.15), we find
(14.17)v0x = -vA sinf
t = 0vx = v0xt = 0;v0x
f.v0xx0
ax = +amax.x = -A-amax.
x = +AFx = -kx
x = -A,x = +A,
-vmax
vmax
u = vt + f).
ax = -v2x = - km
x
v2 = k>m-amax = -v2Aamax = +v2Aax
-vmax = -vA,vmax = +vAvx
ax =dvx
dt= d2x
dt 2 = -v2Acos1vt + f2 (acceleration in SHM)
vx = dxdt
= -vA sin1vt + f2 (velocity in SHM)
axvx
x0 = Acos1p>22 = 0,f = p>2,x0 = Acosp = -A,f = p,
x0 = Acos0 = A,f = 0,
x0 = Acosf
x = x0
t = 0x0.t = 0t = 0).t = 0
f
444 CHAPTER 14 Periodic Motion
These three curves show SHM withthe same period T and amplitude Abut with different phase angles f.
O t
x
T
A
2A
f 5 0 f 5p4
f 5p2
T4
3T4
T2
14.11 Variations of SHM: displacementversus time for the same harmonic oscilla-tor with different phase angles f.
t
(a) Displacement x as a function of time t
x
2TT
xmax 5 Ax 5 A cos (vt 1 f)
vx 5 2vA sin (vt 1 f)
ax 5 2v2A cos (vt 1 f)
Oxmax 5 2A T
t
(b) Velocity vx as a function of time t
vx
T 2T2vmax 5 2vA
vmax 5 vAO
(c) Acceleration ax as a function of time t
t
ax
T 2T2amax 5 2v2A
amax 5 v2AO
The ax-t graph is shifted by cycle from thevx-t graph and by cycle from the x-t graph.
141
2
The vx-t graph is shifted by cycle from the x-t graph.14
14.12 Graphs of (a) x versus t,(b) versus t, and (c) versus tfor a body in SHM. For the motiondepicted in these graphs, f = p>3.
axvx
δ δ
δ
d2x
dt2= −kmx
Solução da equação diferencial de 2ª ordem
14
x = Acos ω t +δ( )
16.1 Movimento harmónico simples
ω= k m
Se se mudar os valores de m, A ou k, a posição x(t) também muda:
14.2 Simple Harmonic Motion 443
Displacement, Velocity, and Acceleration in SHMWe still need to find the displacement x as a function of time for a harmonic oscil-lator. Equation (14.4) for a body in simple harmonic motion along the x-axisis identical to Eq. (14.8) for the x-coordinate of the reference point in uniformcircular motion with constant angular speed Hence Eq. (14.5),
describes the x-coordinate for both of these situations. If at the phasor OQ makes an angle (the Greek letter phi) with the positive x-axis,then at any later time t this angle is We substitute this into Eq. (14.5)to obtain
(14.13)
where Figure 14.9 shows a graph of Eq. (14.13) for the particularcase The displacement x is a periodic function of time, as expected forSHM. We could also have written Eq. (14.13) in terms of a sine function ratherthan a cosine by using the identity In simple harmonicmotion the position is a periodic, sinusoidal function of time. There are manyother periodic functions, but none so simple as a sine or cosine function.
The value of the cosine function is always between and 1, so in Eq. (14.13),x is always between and A. This confirms that A is the amplitude of the motion.
The period T is the time for one complete cycle of oscillation, as Fig. 14.9shows. The cosine function repeats itself whenever the quantity in parentheses inEq. (14.13) increases by radians. Thus, if we start at time the time T tocomplete one cycle is given by
which is just Eq. (14.12). Changing either m or k changes the period of oscilla-tion, as shown in Figs. 14.10a and 14.10b. The period does not depend on theamplitude A (Fig. 14.10c).
vT = A km
T = 2p or T = 2pAmk
t = 0,2p
-A-1
cos a = sin1a + p>22.f = 0.v = 2k>m .
x = Acos1vt + f2 (displacement in SHM)
u = vt + f.f
t = 0x = A cos u,v = 2k>m .
EXECUTE: (a) When the force the spring exerts onthe spring balance is From Eq. (14.3),
(b) From Eq. (14.10), with ,
T = 1ƒ
= 13.2 cycle>s = 0.31 s
ƒ = v
2p=
20 rad>s2p rad>cycle
= 3.2 cycle>s = 3.2 Hz
v = A km
= B200 kg>s2
0.50 kg= 20 rad>sm = 0.50 kg
k = -Fx
x= - -6.0 N
0.030 m= 200 N>m = 200 kg>s2
Fx = -6.0 N.x = 0.030 m, EVALUATE: The amplitude of the oscillation is 0.020 m, the dis-
tance that we pulled the glider before releasing it. In SHM theangular frequency, frequency, and period are all independent of theamplitude. Note that a period is usually stated in “seconds” ratherthan “seconds per cycle.”
12
x
2TtO
xmax 5 A
T
T 12 T
2xmax 5 2A
14.9 Graph of x versus t [see Eq. (14.13)]for simple harmonic motion. The caseshown has f = 0.
(a) Increasing m; same A and k
O t
x
1 2 3
Mass m increases from curve1 to 2 to 3. Increasing m aloneincreases the period.
14.10 Variations of simple harmonic motion. All cases shown have [see Eq. (14.13)].f = 0
(b) Increasing k; same A and m
tO
x
3 2 1
Force constant k increases fromcurve 1 to 2 to 3. Increasing k alonedecreases the period.
(c) Increasing A; same k and m
O t
x
32
1
Amplitude A increases from curve1 to 2 to 3. Changing A alone hasno effect on the period.
PhET: Motion in 2DActivPhysics 9.1: Position Graphs andEquationsActivPhysics 9.2: Describing VibrationalMotionActivPhysics 9.5: Age Drops Tarzan
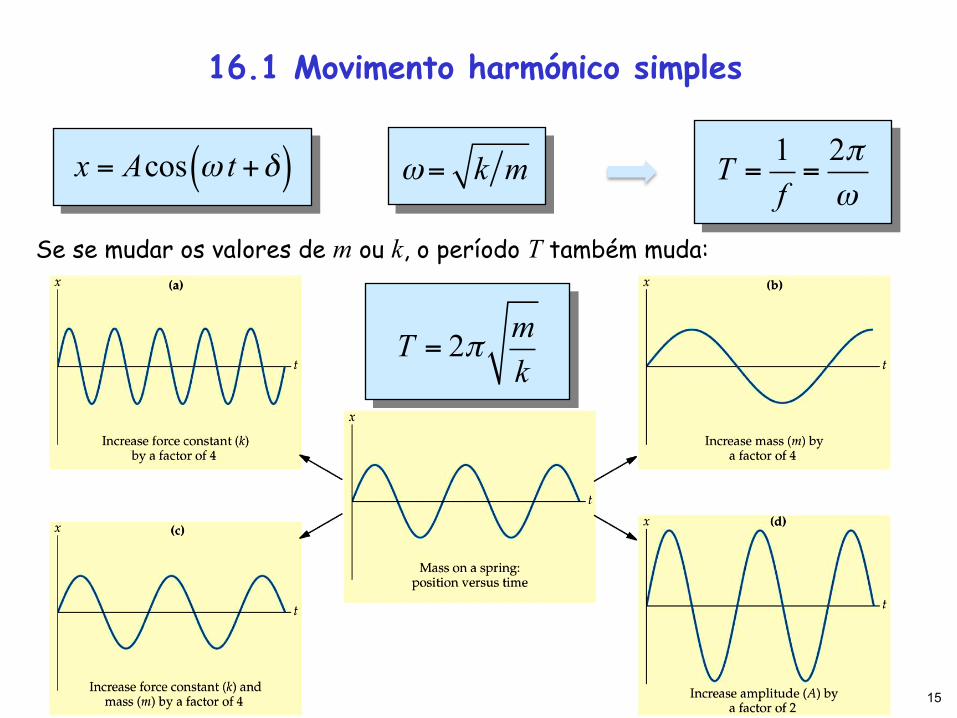
15
x = Acos ω t +δ( )
16.1 Movimento harmónico simples
ω= k m
Se se mudar os valores de m ou k, o período T também muda:
T = 1f=2πω
T = 2π mk
16
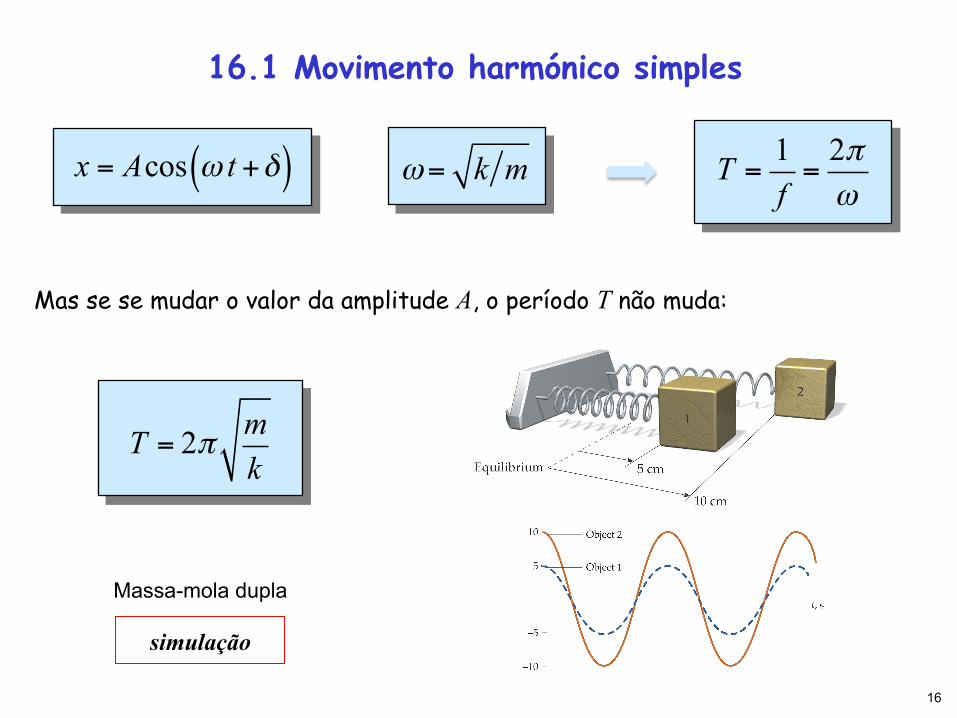
x = Acos ω t +δ( )
16.1 Movimento harmónico simples
ω= k m
Mas se se mudar o valor da amplitude A, o período T não muda:
T = 1f=2πω
T = 2π mk
Massa-mola dupla
simulação
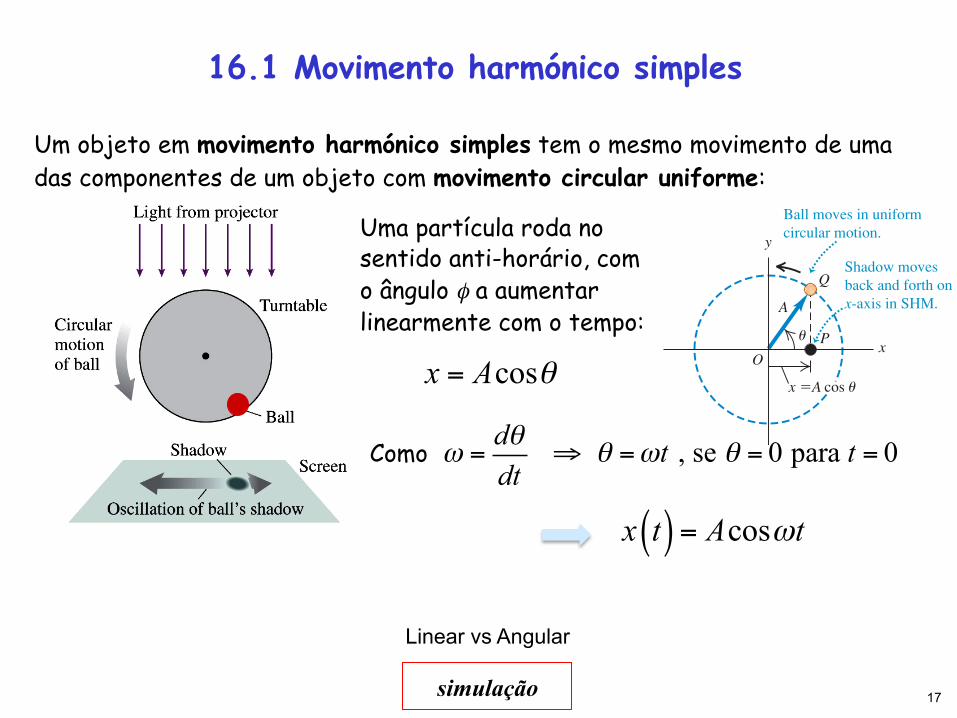
Um objeto em movimento harmónico simples tem o mesmo movimento de uma das componentes de um objeto com movimento circular uniforme:
17
Linear vs Angular
simulação
Uma partícula roda no sentido anti-horário, com o ângulo φ a aumentar linearmente com o tempo:
x = Acosθ
Why is simple harmonic motion important? Keep in mind that not all periodicmotions are simple harmonic; in periodic motion in general, the restoring forcedepends on displacement in a more complicated way than in Eq. (14.3). But inmany systems the restoring force is approximately proportional to displacementif the displacement is sufficiently small (Fig. 14.4). That is, if the amplitude issmall enough, the oscillations of such systems are approximately simple har-monic and therefore approximately described by Eq. (14.4). Thus we can useSHM as an approximate model for many different periodic motions, such as thevibration of the quartz crystal in a watch, the motion of a tuning fork, the electriccurrent in an alternating-current circuit, and the oscillations of atoms in mole-cules and solids.
Circular Motion and the Equations of SHMTo explore the properties of simple harmonic motion, we must express the dis-placement x of the oscillating body as a function of time, The second deriv-ative of this function, must be equal to times the function itself,as required by Eq. (14.4). As we mentioned, the formulas for constant accelera-tion from Section 2.4 are no help because the acceleration changes constantly asthe displacement x changes. Instead, we’ll find by noticing a striking similar-ity between SHM and another form of motion that we’ve already studied.
Figure 14.5a shows a top view of a horizontal disk of radius A with a ballattached to its rim at point Q. The disk rotates with constant angular speed (measured in so the ball moves in uniform circular motion. A horizontallight beam shines on the rotating disk and casts a shadow of the ball on a screen.The shadow at point P oscillates back and forth as the ball moves in a circle. Wethen arrange a body attached to an ideal spring, like the combination shown inFigs. 14.1 and 14.2, so that the body oscillates parallel to the shadow. We willprove that the motion of the body and the motion of the ball’s shadow areidentical if the amplitude of the body’s oscillation is equal to the disk radius A,and if the angular frequency of the oscillating body is equal to the angularspeed of the rotating disk. That is, simple harmonic motion is the projection ofuniform circular motion onto a diameter.
We can verify this remarkable statement by finding the acceleration of theshadow at P and comparing it to the acceleration of a body undergoing SHM,given by Eq. (14.4). The circle in which the ball moves so that its projectionmatches the motion of the oscillating body is called the reference circle; wewill call the point Q the reference point. We take the reference circle to lie in the
v2pƒ
rad>s),v
x1t21-k>m2d2x>dt 2,
x1t2.
440 CHAPTER 14 Periodic Motion
... but Fx 5 2kx can be agood approximation to the forceif the displacement x is sufficiently small.
Ideal case: The restoring force obeys Hooke’slaw (Fx 5 2kx), so the graph of Fx versus x is astraight line.
Typical real case: Therestoring force deviatesfrom Hooke’s law ...
O Displacement x
Restoring force Fx
14.4 In most real oscillations Hooke’slaw applies provided the body doesn’tmove too far from equilibrium. In such acase small-amplitude oscillations areapproximately simple harmonic.
u
Shadow of ballon screen
Ball’s shadow
Ball on rotatingturntable
While the ball Qon the turntablemoves in uniformcircular motion,its shadow P movesback and forth onthe screen in simpleharmonic motion.
Illuminatedvertical screen
Illumination
Table
Light beam
A
A
2A O P
Q
Ball moves in uniformcircular motion.
Shadow movesback and forth onx-axis in SHM.
(a) Apparatus for creating the reference circle (b) An abstract representation of the motion in (a)
OP
A
y
x
Q
x !A cos uv
14.5 (a) Relating uniform circular motion and simple harmonic motion. (b) The ball’s shadow moves exactly like a body oscillatingon an ideal spring.
Como ω =dθdt
⇒ θ =ωt , se θ = 0 para t = 0
x t( ) = Acosωt
16.1 Movimento harmónico simples
14.2 Simple Harmonic Motion 445
To find we divide Eq. (14.17) by Eq. (14.14). This eliminates A and gives anequation that we can solve for
(14.18)
It is also easy to find the amplitude A if we are given and We’ll sketchthe derivation, and you can fill in the details. Square Eq. (14.14); then divideEq. (14.17) by square it, and add to the square of Eq. (14.14). The right sidewill be which is equal to The final result is
(14.19)
Note that when the body has both an initial displacement and a nonzero initialvelocity the amplitude A is not equal to the initial displacement. That’s rea-sonable; if you start the body at a positive but give it a positive velocity itwill go farther than before it turns and comes back.x0
v0x,x0
v0x,x0
A = Bx02 +
v0x2
v2 (amplitude in SHM)
A2.A21sin2 f + cos2 f2,v,
v0x.x0
f = arctana -v0x
vx0b (phase angle in SHM)
v0x
x0=
-vA sinfAcosf
= -v tanf
f:f,
x
x
x
x
x
x
x
x
x
ax ! 2amax
ax 5 2amax
ax 5 amax
x 5 2A x 5Ax 5 0
vx 5 0
vx 5 0
vx 5 0
axvx
axvx
axvx
axvx
2A 2A/2 A/2 A0
ax 5 0
ax 5 0
x
vx 5 2vmax
vx 5 vmax
14.13 How x-velocity and x-acceleration vary during one cycle of SHM.
ax
vx
Problem-Solving Strategy 14.1 Simple Harmonic Motion I: Describing Motion
IDENTIFY the relevant concepts: An oscillating system undergoessimple harmonic motion (SHM) only if the restoring force isdirectly proportional to the displacement.
SET UP the problem using the following steps:1. Identify the known and unknown quantities, and determine
which are the target variables.2. Distinguish between two kinds of quantities. Properties of the
system include the mass m, the force constant k, and quantitiesderived from m and k, such as the period T, frequency andangular frequency These are independent of properties of themotion, which describe how the system behaves when it is setinto motion in a particular way; they include the amplitude A,maximum velocity and phase angle , and values of x,and at particular times.
3. If necessary, define an x-axis as in Fig. 14.13, with the equilib-rium position at x = 0.
ax
vx,fvmax,
v.ƒ,
EXECUTE the solution as follows:1. Use the equations given in Sections 14.1 and 14.2 to solve for
the target variables.2. To find the values of x, and at particular times, use Eqs.
(14.13), (14.15), and (14.16), respectively. If the initial positionand initial velocity are both given, determine and A
from Eqs. (14.18) and (14.19). If the body has an initial posi-tive displacement but zero initial velocity thenthe amplitude is and the phase angle is If it hasan initial positive velocity but no initial displacement
the amplitude is and the phase angle isExpress all phase angles in radians.
EVALUATE your answer: Make sure that your results are consistent.For example, suppose you used and to find general expres-sions for x and at time t. If you substitute into these expres-sions, you should get back the given values of and v0x.x0
t = 0vx
v0xx0
f = -p>2.A = v0x>v1x0 = 02, v0x
f = 0.A = x0
1v0x = 02,x0
fv0xx0
axvx,
Example 14.3 Describing SHM
We give the glider of Example 14.2 an initial displacement x0 = SOLUTION
IDENTIFY and SET UP: As in Example 14.2, the oscillations areSHM. We use equations from this section and the given values k !200 N m, m ! 0.50 kg, and to calculate the target variables Aand and to obtain expressions for x, and .
Continued
axvx,fv0xx0,>
and an initial velocity ! (a) Find theperiod, amplitude, and phase angle of the resulting motion. (b) Writeequations for the displacement, velocity, and acceleration as func-tions of time.
+0.40 m>s.v0x+0.015 m
14.2 Simple Harmonic Motion 441
xy-plane, with the origin O at the center of the circle (Fig. 14.5b). At time t thevector OQ from the origin to the reference point Q makes an angle with thepositive x-axis. As the point Q moves around the reference circle with constantangular speed the vector OQ rotates with the same angular speed. Such arotating vector is called a phasor. (This term was in use long before the inven-tion of the Star Trek stun gun with a similar name. The phasor method for ana-lyzing oscillations is useful in many areas of physics. We’ll use phasors when westudy alternating-current circuits in Chapter 31 and the interference of light inChapters 35 and 36.)
The x-component of the phasor at time t is just the x-coordinate of the point Q:
(14.5)
This is also the x-coordinate of the shadow P, which is the projection of Q ontothe x-axis. Hence the x-velocity of the shadow P along the x-axis is equal to thex-component of the velocity vector of point Q (Fig. 14.6a), and the x-accelerationof P is equal to the x-component of the acceleration vector of Q (Fig. 14.6b). Sincepoint Q is in uniform circular motion, its acceleration vector is always directedtoward O. Furthermore, the magnitude of is constant and given by the angularspeed squared times the radius of the circle (see Section 9.3):
(14.6)
Figure 14.6b shows that the x-component of is Combiningthis with Eqs. (14.5) and (14.6), we get that the acceleration of point P is
or (14.7)
(14.8)
The acceleration of point P is directly proportional to the displacement x andalways has the opposite sign. These are precisely the hallmarks of simple har-monic motion.
Equation (14.8) is exactly the same as Eq. (14.4) for the acceleration of a har-monic oscillator, provided that the angular speed of the reference point Q isrelated to the force constant k and mass m of the oscillating body by
(14.9)
We have been using the same symbol for the angular speed of the referencepoint Q and the angular frequency of the oscillating point P. The reason is thatthese quantities are equal! If point Q makes one complete revolution in time T,then point P goes through one complete cycle of oscillation in the same time; henceT is the period of the oscillation. During time T the point Q moves through
radians, so its angular speed is But this is just the same as Eq. (14.2)for the angular frequency of the point P, which verifies our statement about thetwo interpretations of This is why we introduced angular frequency in Section14.1; this quantity makes the connection between oscillation and circular motion.So we reinterpret Eq. (14.9) as an expression for the angular frequency of simpleharmonic motion for a body of mass m, acted on by a restoring force with forceconstant k:
(14.10)
When you start a body oscillating in SHM, the value of is not yours to choose;it is predetermined by the values of k and m. The units of k are or so
is in When we take the square root in Eq. (14.10), we getor more properly because this is an angular frequency (recall that a
radian is not a true unit).rad>ss-1,
1kg>s22>kg = s-2.k>m kg>s2,N>mv
v = A km (simple harmonic motion)
v.
v = 2p>T.2p
v
v2 = km or v = A k
m
v
ax = -v2x
ax = -aQ cosu = -v2Acosu
ax = -aQ cosu.aSQ
aQ = v2A
aSQ
aSQ
x = Acosu
v,
u
u
u
u
u
O
P
y
x
Q
vQ
5 2vQ sin u
(a) Using the reference circle todetermine the x-velocity of point P
vx
O
P
y
x
Q
5 2aQ cos u
(b) Using the reference circle todetermine the x-acceleration of point P
aQ
ax
14.6 The (a) x-velocity and (b) x-acceleration of the ball’s shadow P(see Fig. 14.5) are the x-componentsof the velocity and acceleration vectors,respectively, of the ball Q.
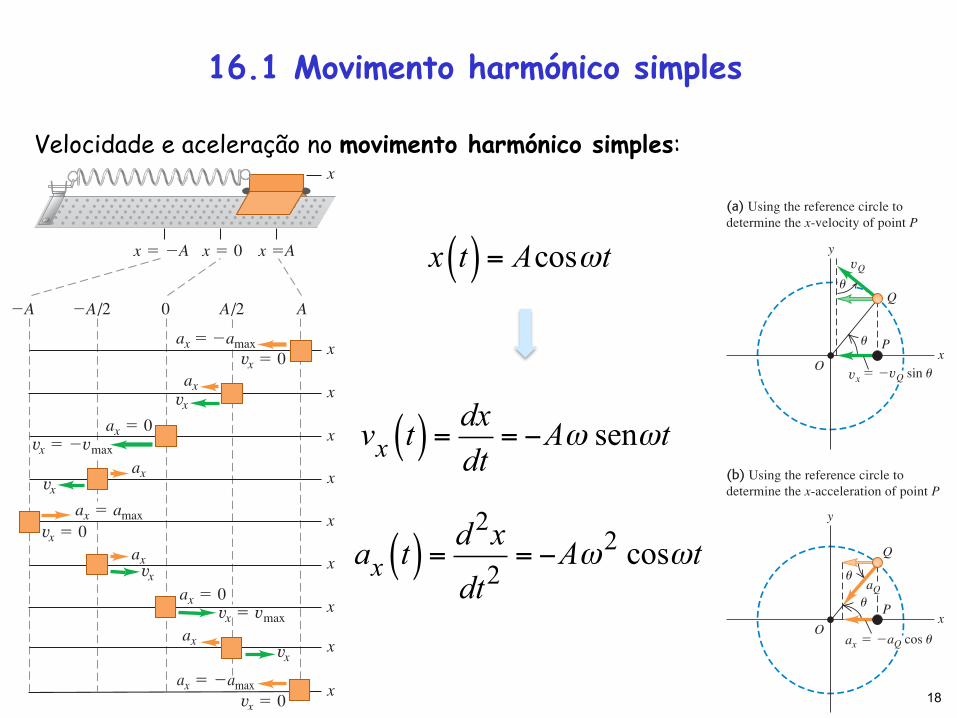
Velocidade e aceleração no movimento harmónico simples:
18
x t( ) = Acosωt
vx t( ) =dxdt= −Aω senωt
ax t( ) =d2x
dt2= −Aω2 cosωt
16.1 Movimento harmónico simples
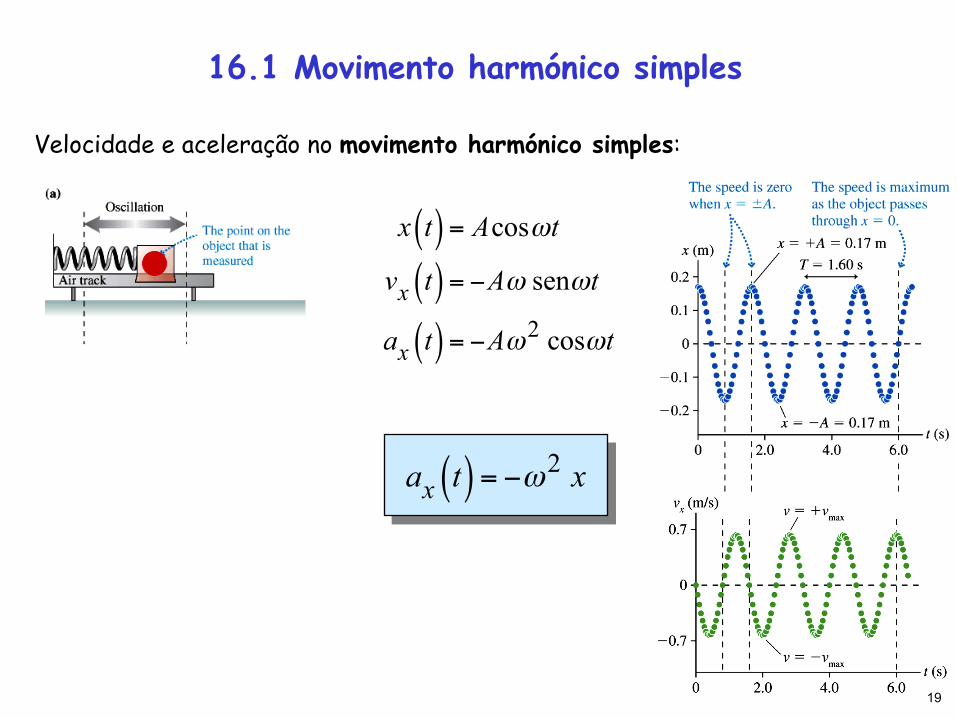
Velocidade e aceleração no movimento harmónico simples:
19
16.1 Movimento harmónico simples
x t( ) = Acosωtvx t( ) = −Aω senωtax t( ) = −Aω2 cosωt
ax t( ) = −ω2 x
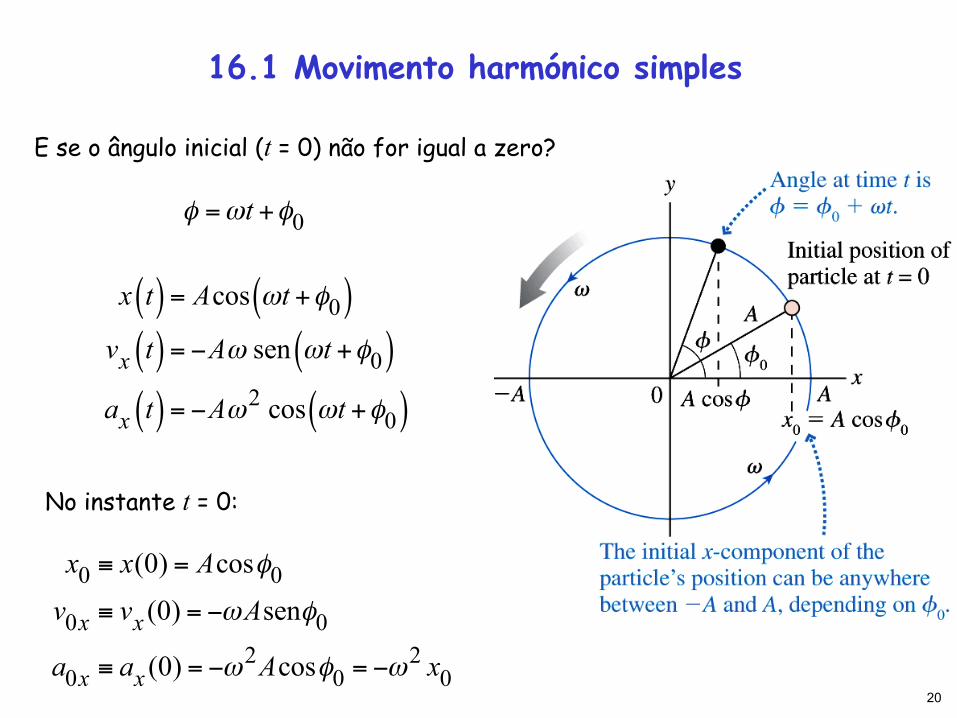
E se o ângulo inicial (t = 0) não for igual a zero?
20
16.1 Movimento harmónico simples
φ =ωt +φ0
x t( ) = Acos ωt +φ0( )vx t( ) = −Aω sen ωt +φ0( )ax t( ) = −Aω2 cos ωt +φ0( )
No instante t = 0:
x0 ≡ x(0) = Acosφ0v0x ≡ vx (0) = −ωAsenφ0
a0x ≡ ax (0) = −ω2Acosφ0 = −ω
2 x0
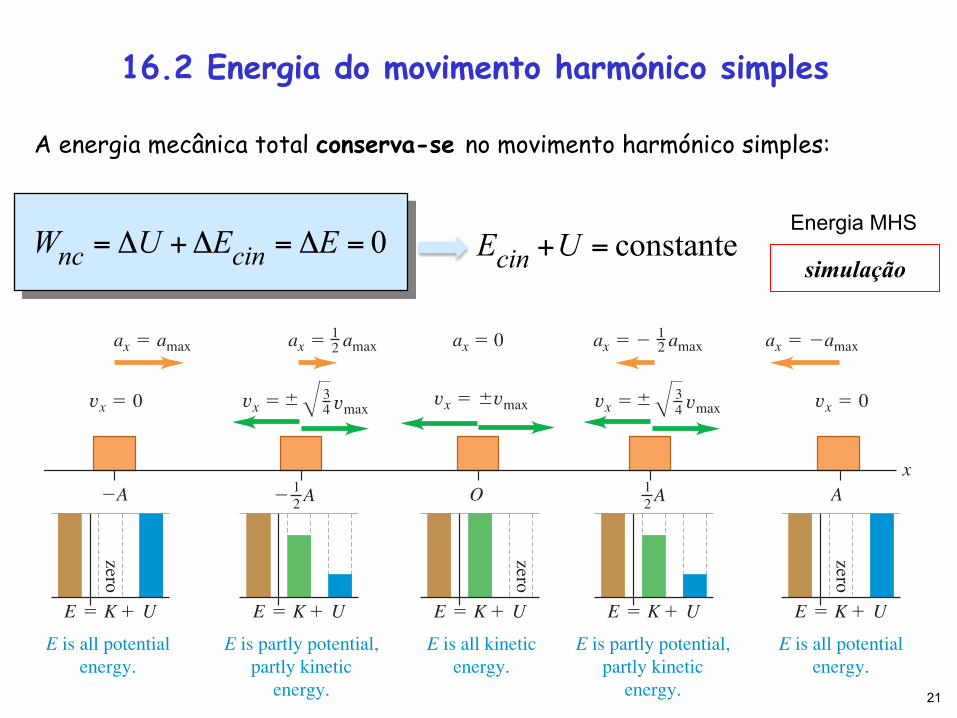
A energia mecânica total conserva-se no movimento harmónico simples:
21
16.2 Energia do movimento harmónico simples
Wnc = ΔU +ΔEcin = ΔE = 014.3 Energy in Simple Harmonic Motion 447
(Recall that Hence our expressions for displacement andvelocity in SHM are consistent with energy conservation, as they must be.
We can use Eq. (14.21) to solve for the velocity of the body at a given dis-placement x:
(14.22)
The sign means that at a given value of x the body can be moving in eitherdirection. For example, when
Equation (14.22) also shows that the maximum speed occurs at Using Eq. (14.10), we find that
(14.23)
This agrees with Eq. (14.15): oscillates between and
Interpreting E, K, and U in SHMFigure 14.14 shows the energy quantities E, K, and U at and
Figure 14.15 is a graphical display of Eq. (14.21); energy (kinetic,potential, and total) is plotted vertically and the coordinate x is plotted horizontally.x = ! A.
x = ! A>2,x = 0,
+vA.-vAvx
vmax = A km
A = vA
v = 2k>m ,x = 0.vmax
vx = !A km BA2 - a!
A2b2
= !A34 A k
mA
x = ! A>2,!
vx = !A km2A2 - x2
vx
sin2a + cos2a = 1.)
E is all potentialenergy.
2A 2 A
E is all potentialenergy.
E is partly potential,partly kinetic
energy.
E is partly potential,partly kinetic
energy.
E is all kineticenergy.
ax 5 amax ax 5 2amax
vx 5 6vmax
ax 5 amax ax 5 0
vmaxvx 5 0 vx 5 0vx 5 6
12
Åx
34 vmaxvx 5 6Å 3
4
12 ax 5 2 amax
12
O AA12
zero
zero
zero
E 5 K 1 U E 5 K 1 U E 5 K 1 U E 5 K 1 U E 5 K 1 U
14.14 Graphs of E, K, and U versus displacement in SHM. The velocity of the body is not constant, so these images of the body atequally spaced positions are not equally spaced in time.
The total mechanical energy E is constant.
(a) The potential energy U and total mechanicalenergy E for a body in SHM as a function ofdisplacement x
Energy
x
U 5 kx212
E
K
U
O A2A x
At x 5 6A the energy is all potential; the kineticenergy is zero.
At x 5 0 the energy is all kinetic;the potential energy is zero.
At these points the energy is halfkinetic and half potential.
(b) The same graph as in (a), showingkinetic energy K as well
Energy
x
E 5 K 1 U
O A2A
UK
14.15 Kinetic energy K, potentialenergy U, and total mechanical energy Eas functions of position for SHM. At eachvalue of x the sum of the values of K andU equals the constant value of E. Can youshow that the energy is half kinetic and half potential at x = !21
2 A?
Energia MHS
simulação Ecin +U = constante
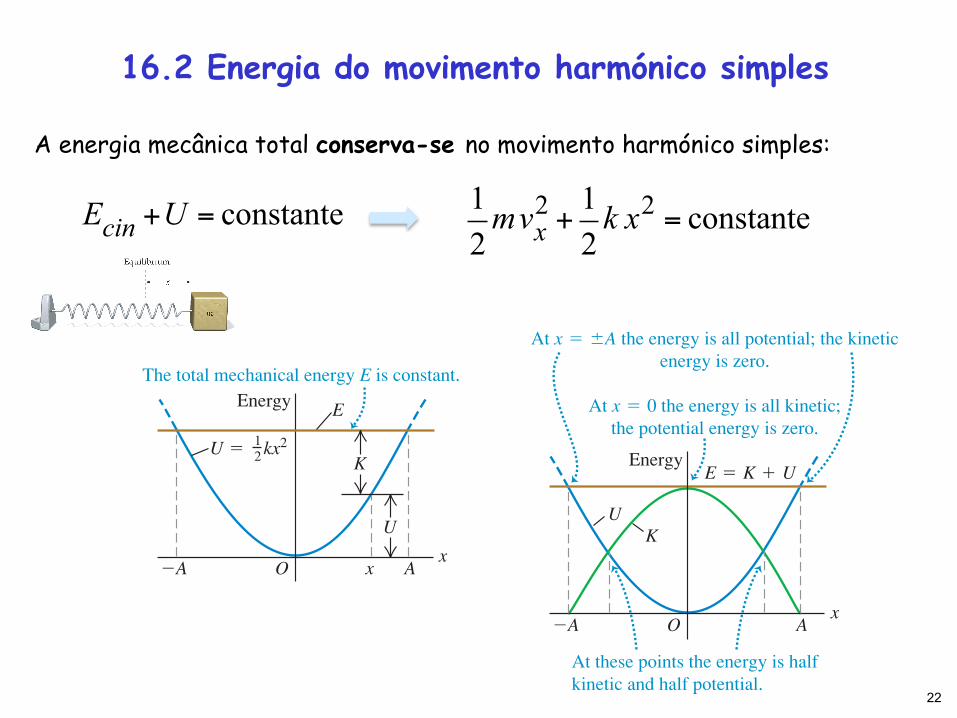
A energia mecânica total conserva-se no movimento harmónico simples:
22
16.2 Energia do movimento harmónico simples
Ecin +U = constante 12mvx
2 +12k x2 = constante
14.3 Energy in Simple Harmonic Motion 447
(Recall that Hence our expressions for displacement andvelocity in SHM are consistent with energy conservation, as they must be.
We can use Eq. (14.21) to solve for the velocity of the body at a given dis-placement x:
(14.22)
The sign means that at a given value of x the body can be moving in eitherdirection. For example, when
Equation (14.22) also shows that the maximum speed occurs at Using Eq. (14.10), we find that
(14.23)
This agrees with Eq. (14.15): oscillates between and
Interpreting E, K, and U in SHMFigure 14.14 shows the energy quantities E, K, and U at and
Figure 14.15 is a graphical display of Eq. (14.21); energy (kinetic,potential, and total) is plotted vertically and the coordinate x is plotted horizontally.x = ! A.
x = ! A>2,x = 0,
+vA.-vAvx
vmax = A km
A = vA
v = 2k>m ,x = 0.vmax
vx = !A km BA2 - a!
A2b2
= !A34 A k
mA
x = ! A>2,!
vx = !A km2A2 - x2
vx
sin2a + cos2a = 1.)
E is all potentialenergy.
2A 2 A
E is all potentialenergy.
E is partly potential,partly kinetic
energy.
E is partly potential,partly kinetic
energy.
E is all kineticenergy.
ax 5 amax ax 5 2amax
vx 5 6vmax
ax 5 amax ax 5 0
vmaxvx 5 0 vx 5 0vx 5 6
12
Åx
34 vmaxvx 5 6Å 3
4
12 ax 5 2 amax
12
O AA12
zero
zero
zero
E 5 K 1 U E 5 K 1 U E 5 K 1 U E 5 K 1 U E 5 K 1 U
14.14 Graphs of E, K, and U versus displacement in SHM. The velocity of the body is not constant, so these images of the body atequally spaced positions are not equally spaced in time.
The total mechanical energy E is constant.
(a) The potential energy U and total mechanicalenergy E for a body in SHM as a function ofdisplacement x
Energy
x
U 5 kx212
E
K
U
O A2A x
At x 5 6A the energy is all potential; the kineticenergy is zero.
At x 5 0 the energy is all kinetic;the potential energy is zero.
At these points the energy is halfkinetic and half potential.
(b) The same graph as in (a), showingkinetic energy K as well
Energy
x
E 5 K 1 U
O A2A
UK
14.15 Kinetic energy K, potentialenergy U, and total mechanical energy Eas functions of position for SHM. At eachvalue of x the sum of the values of K andU equals the constant value of E. Can youshow that the energy is half kinetic and half potential at x = !21
2 A?
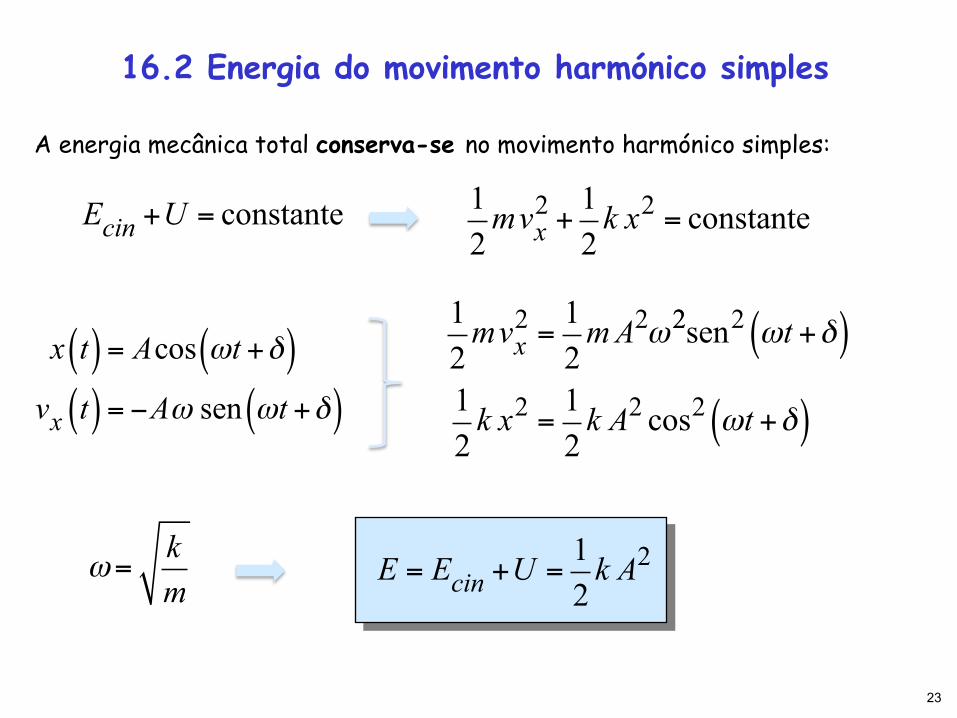
A energia mecânica total conserva-se no movimento harmónico simples:
23
16.2 Energia do movimento harmónico simples
Ecin +U = constante 12mvx
2 +12k x2 = constante
x t( ) = Acos ωt +δ( )vx t( ) = −Aω sen ωt +δ( )
12mvx
2 =12mA2ω22sen2 ωt +δ( )
12k x2 = 1
2k A2 cos2 ωt +δ( )
ω=km
E = Ecin +U =12k A2
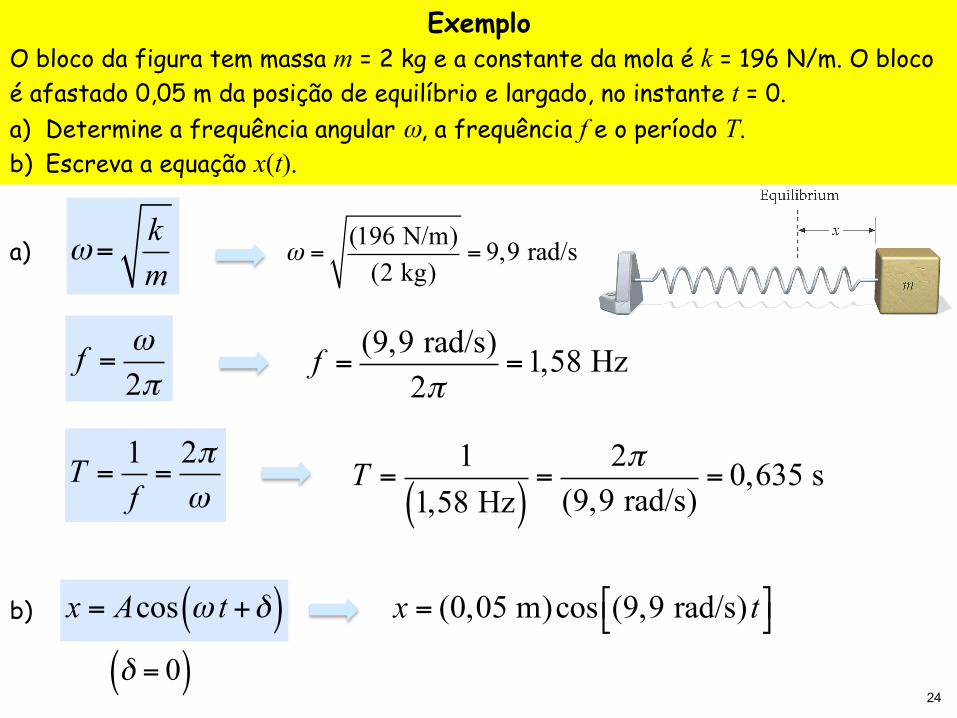
Exemplo O bloco da figura tem massa m = 2 kg e a constante da mola é k = 196 N/m. O bloco é afastado 0,05 m da posição de equilíbrio e largado, no instante t = 0. a) Determine a frequência angular ω, a frequência f e o período T. b) Escreva a equação x(t).
a) ω=km
ω =(196 N/m)
(2 kg)= 9,9 rad/s
T = 1f=2πω
f = ω2π
f = (9,9 rad/s)2π
=1,58 Hz
T = 11,58 Hz( )
=2π
(9,9 rad/s)= 0,635 s
b) x = Acos ω t +δ( ) x = (0,05 m)cos (9,9 rad/s) t⎡⎣ ⎤⎦
δ = 0( )24