Embed Size (px)
Citation preview
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 1/18
Reverse Engineering
1. INTRODUZIONE
La necessità di riprodurre la geometria degli elementi creati manualmente dai modellisti èormai sentita nelle moderne infrastrutture produttive che necessitano del modello matematico
(CAD 3D) accurato, sia per la fase di prototipazione che per i successivi processi di sviluppo
e lavorazione. Il database del CAD tridimensionale costituisce pertanto una solida base di
partenza per tutto il ciclo produttivo e gioca un ruolo di primaria importanza nel processo di
sviluppo del prodotto.
Peculiarità delle creazioni dei designer industriali è la complessità delle forme da realizzare,
non descrivibili con entità geometriche standard. I prodotti infatti, oltre ché possedere le
caratteristiche funzionali definite dai progettisti, devono essere dotati anche di un valore
estetico e devono essere di forte richiamo per il pubblico.
Esistono sul mercato dei pacchetti software che consentono di disegnare forme non
matematiche, i quali sono i grado, a partire da un semplice disegno bidimensionale, di
modellare un oggetto tridimensionale; tuttavia il lavoro da svolgere è particolarmente oneroso
specie in presenza di forme complesse e ricche di dettagli.
Un possibile aiuto può venire dalle tecniche di Reverse Engineering (RE) che consentono di
recuperare delle forme già esistenti ed eventualmente effettuare delle operazioni di modifica
su esse. Questa attività permette inoltre di recuperare il patrimonio di forme (modelli fisici)
che ciascuna Azienda possiede inserendole in un data-base dove rimarranno sino a che non
siano giudicate utili.
ReverseReverse EngineeringEngineering
OGGETTO FISICO OGGETTO VIRTUALE
CAM e Prototipazione rapida
R ever seE n i n e e r i n
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 2/18
Reverse Engineering Porf. Maurizio Muzzupappa
MetodologiaMetodologia
Prototipo
Oggetto esistente
Componente
danneggiato
Modello
CAD
Modifica
del design
Ideazione di un
nuovo design
Controllo qualità
R.E.
2. IL REVERSE ENGINEERING
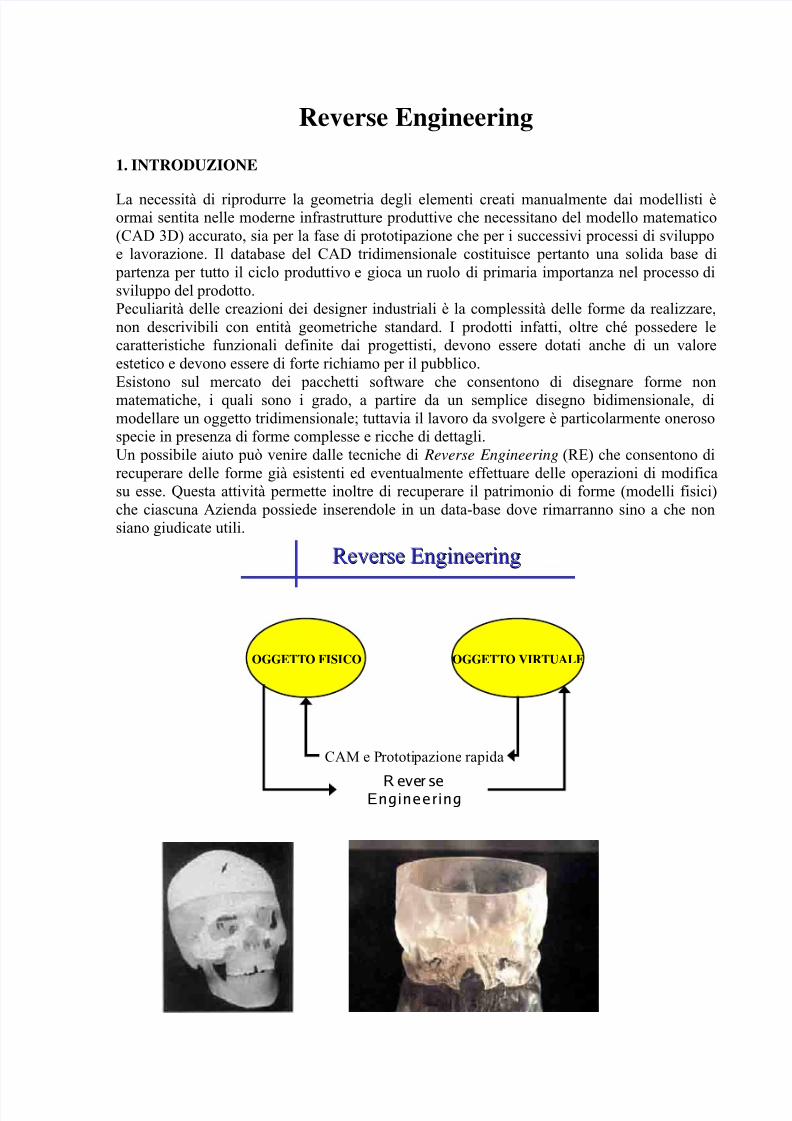
Con il termine Reverse Engineering (RE) si individua una metodologia che consente,partendo dal modello fisico, di risalire alla sua descrizione matematica. Dalla nuvola di punti,
ottenuta dal processo di tastatura con o senza contatto, è quindi possibile matematizzare
l'elemento, realizzare uno shading o generare un file STL idoneo alla successiva
prototipazione.
Questo metodo rappresenta dunque un'evoluzione di quanto avveniva nel passato nelle
officine di costruzione stampi, con i primi sistemi di copiatura che permettevano
esclusivamente la replicazione senza modifiche dei master realizzati nelle modellerie.Il riprodurre per intero il modello matematico dell’oggetto solido in questione può essere
necessario in varie circostanze:
♦ nel caso di reperti archeologici può fornire una soluzione rapida ed efficiente per
duplicare e conservare campioni di difficile manipolazione, può permettere di creare
una banca dati accessibile anche a notevoli distanze, infine può essere utile per creare
imballaggi;
♦ nell’ambito industriale permette di chiudere il loop tra CAD-CAM e prototipazione
rapida PR, e molto spesso costituisce il punto di partenza per un nuovo progetto,
oppure per il rinnovamento estetico del prodotto;
♦ in campo biomedico consente di preparare modelli di organi e parti anatomiche, utili
per la preparazione di protesi o per l’addestramento del personale ;
♦ per la realizzazione di modelli adatti al corpo umano (calzature, guanti, casco,..);
- 2-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 3/18
Reverse Engineering Porf. Maurizio Muzzupappa
♦ per generare un modello CAD se si ha a disposizione il modello realizzato a mano dal
modellista, oppure dal designer;
♦ per la creazione di archivi di componenti standardizzati utili ad accelerare le
operazioni di progettazione nell’industria
♦ per la ricostruzione di reperti archeologici
♦ per il rilievo di edifici.
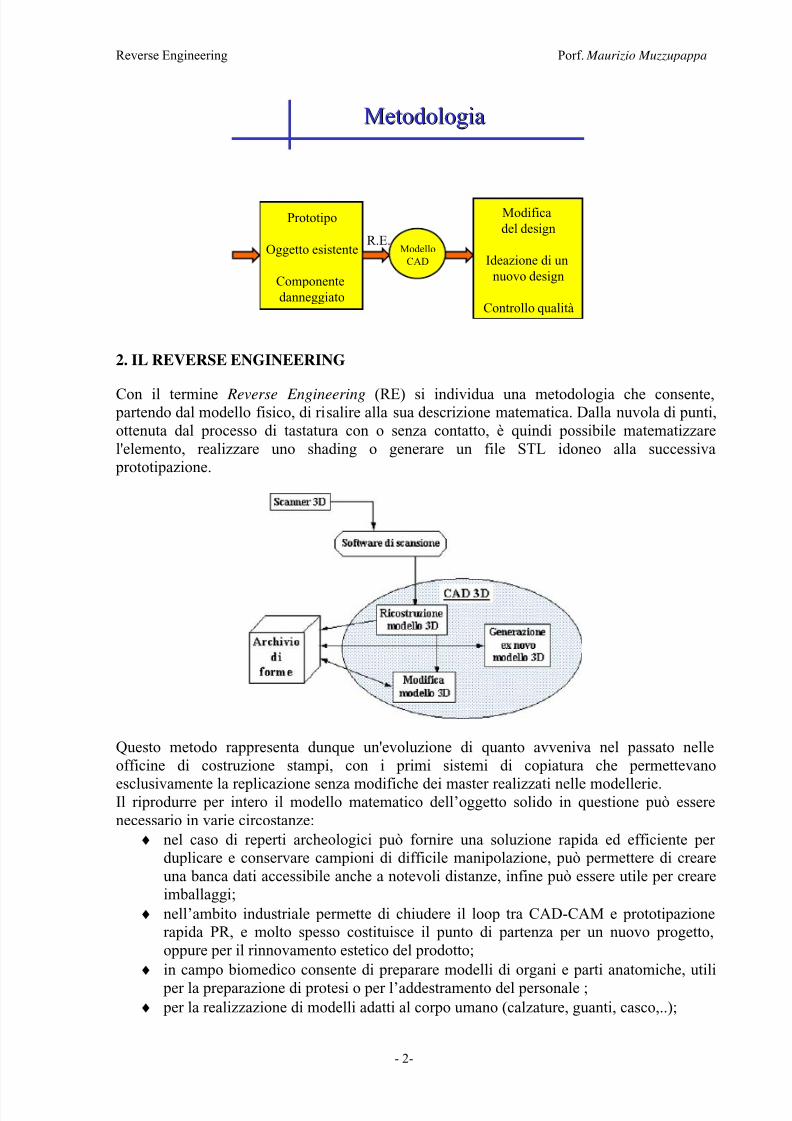
2.1. IL PROCESSO DI RICOSTRUZIONE
Per ricostruire la geometria tridimensionale di un oggetto si deve seguire un ciclo composto
dalle seguenti fasi :
1. Acquisizione dei punti sulla superficie (Nuvola di Punti)
2. Segmentazione (Suddivisione dei Dati in Gruppi Significativi)
3. Ricostruzione delle superfici dai punti
4. Manipolazione della superficie ricostruita
5. Verifica dei punti acquisiti
ReverseReverse EngineeringEngineering
Digitalizzazione
dell’oggetto
Elaborazione
dei dati misurati
Ricostruzione
del modello CAD
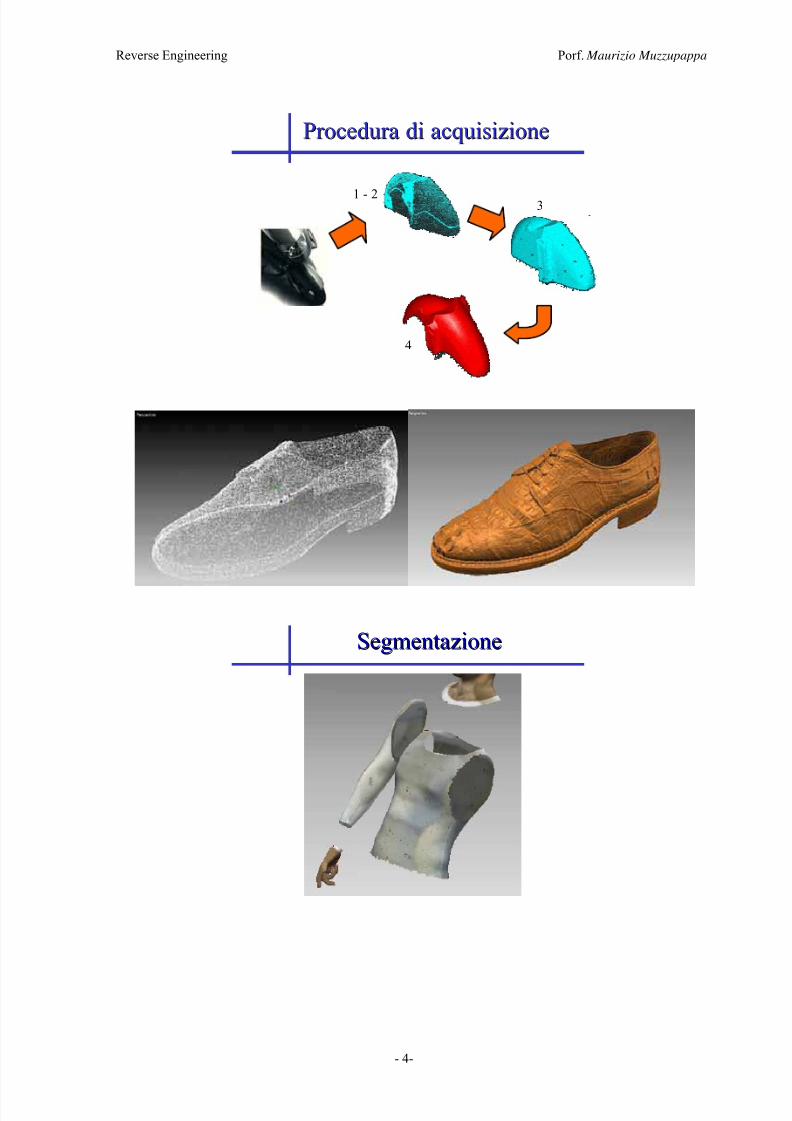
Procedura di acquisizioneProcedura di acquisizione
1. Acquisizione dei punti sullasuperficie (Nuvola di Punti)
2. Segmentazione (Suddivisionedei Dati in Gruppi Significativi)
3. Ricostruzione delle superfici daipunti
4. Manipolazione della superficiericostruita
5. Verifica dei punti acquisiti
- 3-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 4/18
Reverse Engineering Porf. Maurizio Muzzupappa
Procedura di acquisizioneProcedura di acquisizione
1 - 2 3
4
SegmentazioneSegmentazione
- 4-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 5/18
Reverse Engineering Porf. Maurizio Muzzupappa
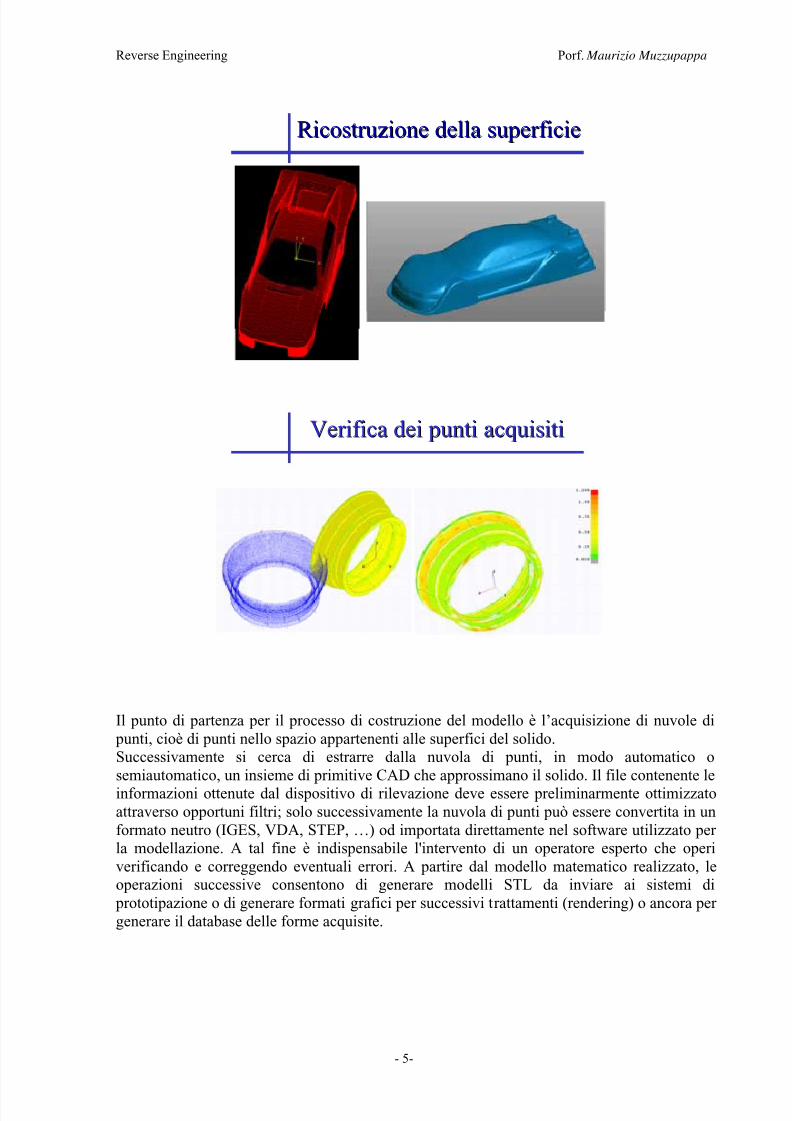
Ricostruzione della superficieRicostruzione della superficie
VerificaVerifica deidei puntipunti acquisitiacquisiti
Il punto di partenza per il processo di costruzione del modello è l’acquisizione di nuvole di
punti, cioè di punti nello spazio appartenenti alle superfici del solido.
Successivamente si cerca di estrarre dalla nuvola di punti, in modo automatico o
semiautomatico, un insieme di primitive CAD che approssimano il solido. Il file contenente leinformazioni ottenute dal dispositivo di rilevazione deve essere preliminarmente ottimizzato
attraverso opportuni filtri; solo successivamente la nuvola di punti può essere convertita in un
formato neutro (IGES, VDA, STEP, …) od importata direttamente nel software utilizzato per
la modellazione. A tal fine è indispensabile l'intervento di un operatore esperto che operi
verificando e correggendo eventuali errori. A partire dal modello matematico realizzato, le
operazioni successive consentono di generare modelli STL da inviare ai sistemi di
prototipazione o di generare formati grafici per successivi trattamenti (rendering) o ancora per
generare il database delle forme acquisite.
- 5-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 6/18
Reverse Engineering Porf. Maurizio Muzzupappa
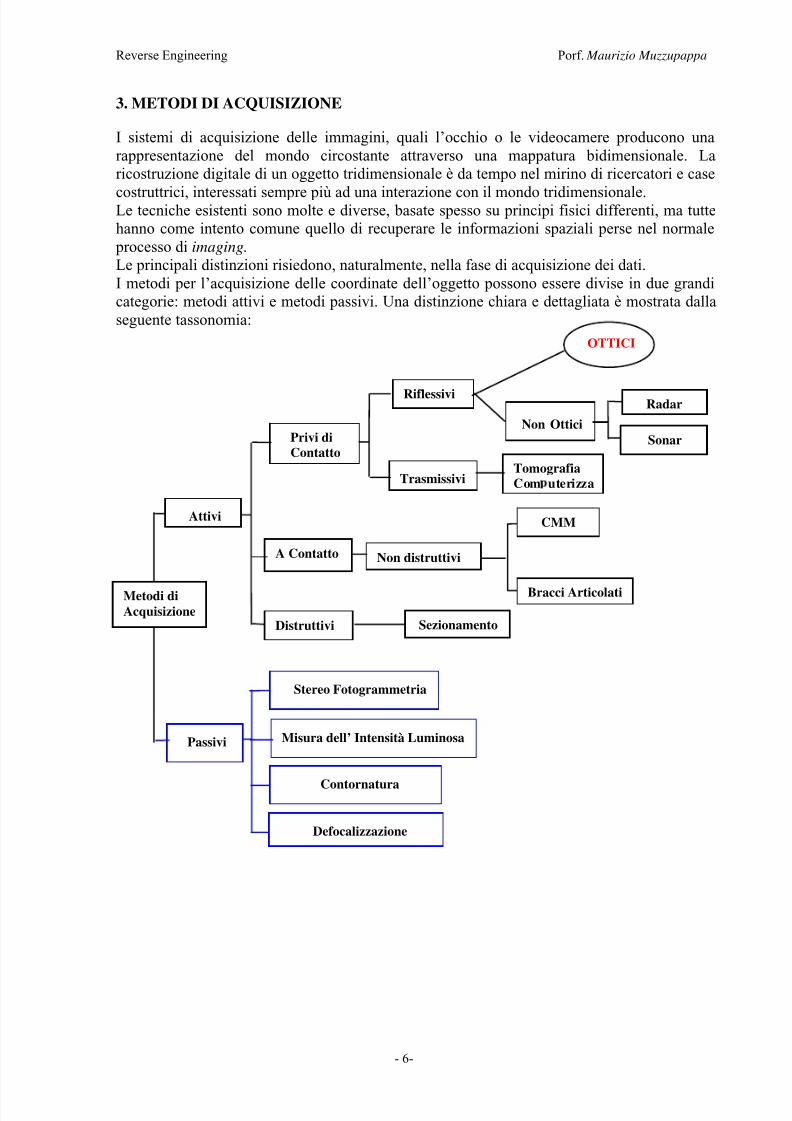
3. METODI DI ACQUISIZIONE
I sistemi di acquisizione delle immagini, quali l’occhio o le videocamere producono una
rappresentazione del mondo circostante attraverso una mappatura bidimensionale. La
ricostruzione digitale di un oggetto tridimensionale è da tempo nel mirino di ricercatori e case
costruttrici, interessati sempre più ad una interazione con il mondo tridimensionale.Le tecniche esistenti sono molte e diverse, basate spesso su principi fisici differenti, ma tutte
hanno come intento comune quello di recuperare le informazioni spaziali perse nel normale
processo di imaging.
Le principali distinzioni risiedono, naturalmente, nella fase di acquisizione dei dati.
I metodi per l’acquisizione delle coordinate dell’oggetto possono essere divise in due grandi
categorie: metodi attivi e metodi passivi. Una distinzione chiara e dettagliata è mostrata dalla
seguente tassonomia:
Defocalizzazione
Misura dell’ Intensità Luminosa
Stereo Fotogrammetria
Attivi
Passivi
CMM
Bracci Articolati
A Contatto
Privi diContatto
Riflessivi
OTTICI
Sonar
TomografiaCom uterizza
Non Ottici
Trasmissivi
Distruttivi
Non distruttivi
Sezionamento
Metodi diAcquisizione
Radar
Contornatura
- 6-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 7/18
Reverse Engineering Porf. Maurizio Muzzupappa
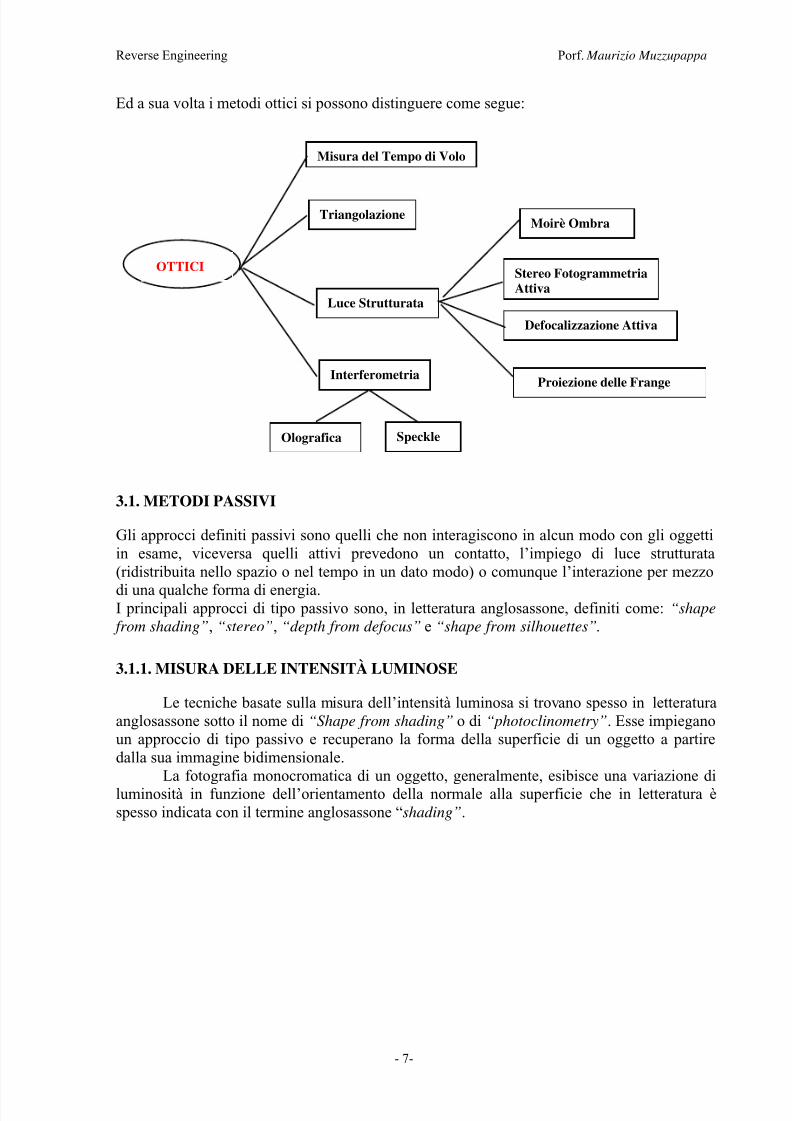
Ed a sua volta i metodi ottici si possono distinguere come segue:
Misura del Tempo di Volo
Triangolazione
Interferometria
Defocalizzazione Attiva
Stereo FotogrammetriaAttiva
Olografica
Proiezione delle Frange
Moirè Ombra
Luce Strutturata
Speckle
OTTICI
3.1. METODI PASSIVI
Gli approcci definiti passivi sono quelli che non interagiscono in alcun modo con gli oggetti
in esame, viceversa quelli attivi prevedono un contatto, l’impiego di luce strutturata
(ridistribuita nello spazio o nel tempo in un dato modo) o comunque l’interazione per mezzo
di una qualche forma di energia.I principali approcci di tipo passivo sono, in letteratura anglosassone, definiti come: “shape
from shading”, “stereo”, “depth from defocus” e “shape from silhouettes”.
3.1.1. MISURA DELLE INTENSITÀ LUMINOSE
Le tecniche basate sulla misura dell’intensità luminosa si trovano spesso in letteratura
anglosassone sotto il nome di “Shape from shading” o di “photoclinometry”. Esse impiegano
un approccio di tipo passivo e recuperano la forma della superficie di un oggetto a partire
dalla sua immagine bidimensionale.
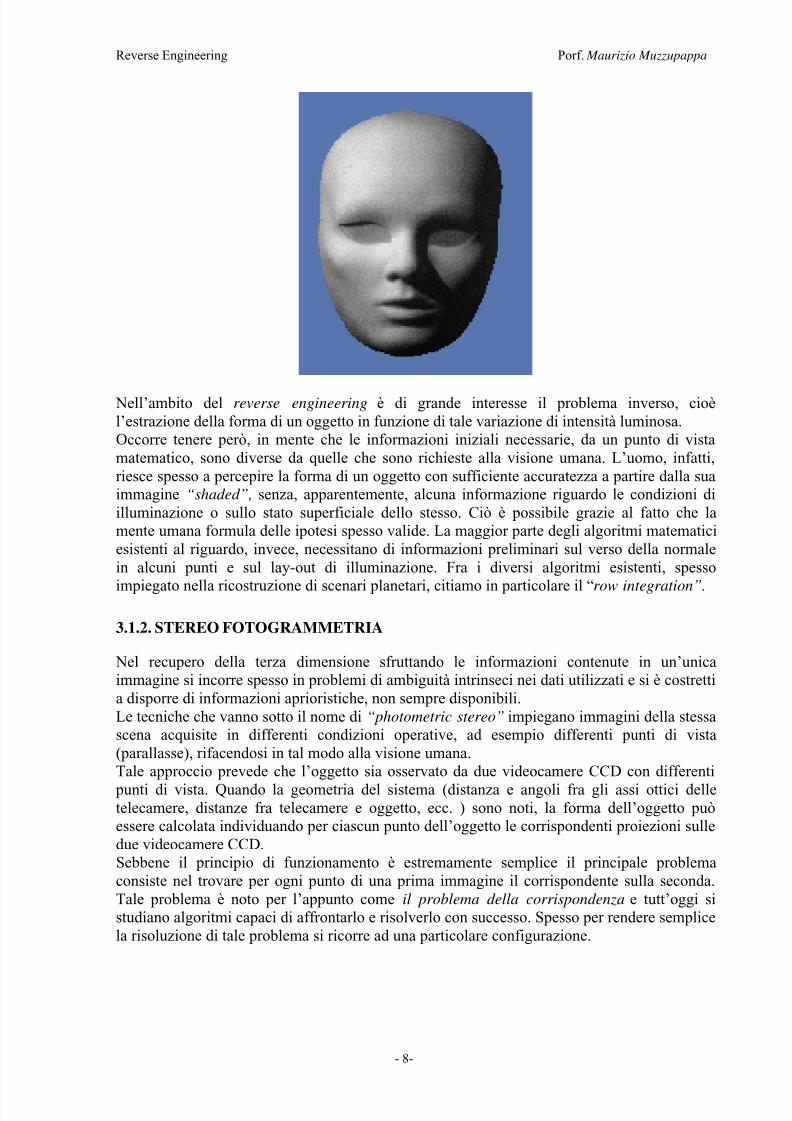
La fotografia monocromatica di un oggetto, generalmente, esibisce una variazione diluminosità in funzione dell’orientamento della normale alla superficie che in letteratura è
spesso indicata con il termine anglosassone “shading”.
- 7-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 8/18
Reverse Engineering Porf. Maurizio Muzzupappa
Nell’ambito del reverse engineering è di grande interesse il problema inverso, cioè
l’estrazione della forma di un oggetto in funzione di tale variazione di intensità luminosa.
Occorre tenere però, in mente che le informazioni iniziali necessarie, da un punto di vista
matematico, sono diverse da quelle che sono richieste alla visione umana. L’uomo, infatti,
riesce spesso a percepire la forma di un oggetto con sufficiente accuratezza a partire dalla sua
immagine “shaded”, senza, apparentemente, alcuna informazione riguardo le condizioni di
illuminazione o sullo stato superficiale dello stesso. Ciò è possibile grazie al fatto che la
mente umana formula delle ipotesi spesso valide. La maggior parte degli algoritmi matematici
esistenti al riguardo, invece, necessitano di informazioni preliminari sul verso della normale
in alcuni punti e sul lay-out di illuminazione. Fra i diversi algoritmi esistenti, spesso
impiegato nella ricostruzione di scenari planetari, citiamo in particolare il “row integration”.
3.1.2. STEREO FOTOGRAMMETRIA
Nel recupero della terza dimensione sfruttando le informazioni contenute in un’unica
immagine si incorre spesso in problemi di ambiguità intrinseci nei dati utilizzati e si è costretti
a disporre di informazioni aprioristiche, non sempre disponibili.
Le tecniche che vanno sotto il nome di “photometric stereo” impiegano immagini della stessa
scena acquisite in differenti condizioni operative, ad esempio differenti punti di vista
(parallasse), rifacendosi in tal modo alla visione umana.
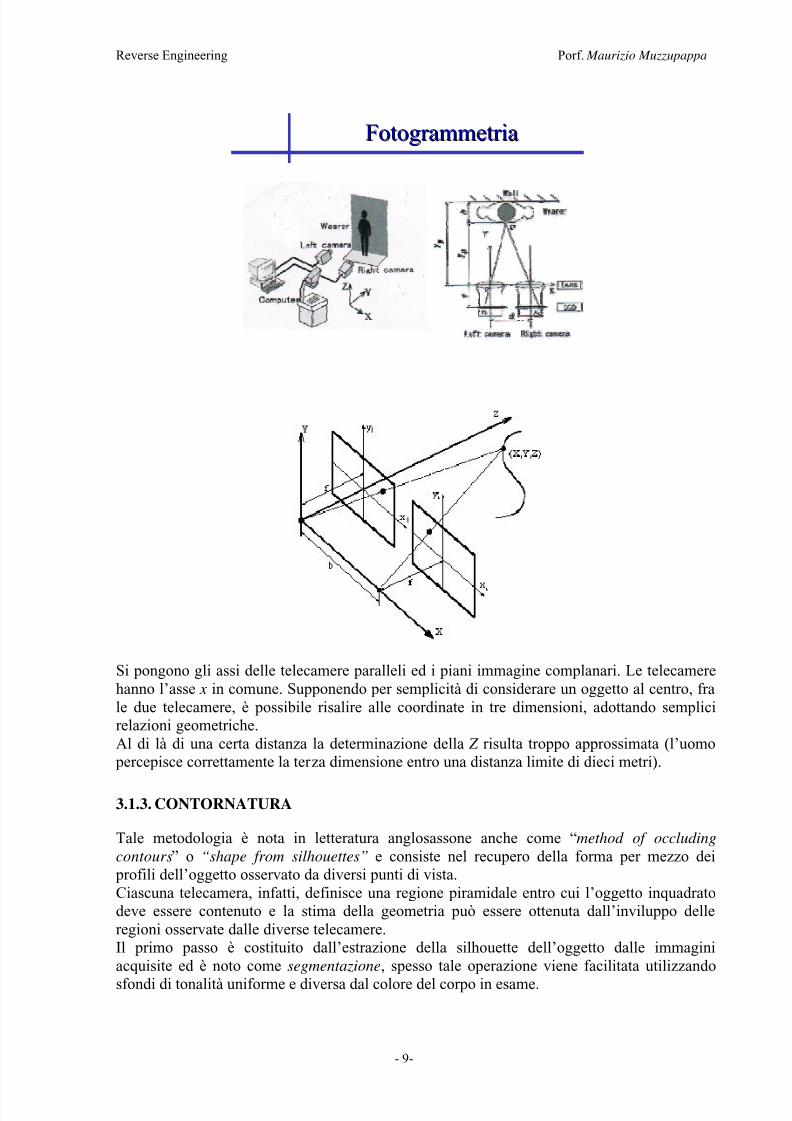
Tale approccio prevede che l’oggetto sia osservato da due videocamere CCD con differenti
punti di vista. Quando la geometria del sistema (distanza e angoli fra gli assi ottici delle
telecamere, distanze fra telecamere e oggetto, ecc. ) sono noti, la forma dell’oggetto può
essere calcolata individuando per ciascun punto dell’oggetto le corrispondenti proiezioni sulle
due videocamere CCD.
Sebbene il principio di funzionamento è estremamente semplice il principale problema
consiste nel trovare per ogni punto di una prima immagine il corrispondente sulla seconda.
Tale problema è noto per l’appunto come il problema della corrispondenza e tutt’oggi si
studiano algoritmi capaci di affrontarlo e risolverlo con successo. Spesso per rendere semplice
la risoluzione di tale problema si ricorre ad una particolare configurazione.
- 8-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 9/18
Reverse Engineering Porf. Maurizio Muzzupappa
FotogrammetriaFotogrammetria
Si pongono gli assi delle telecamere paralleli ed i piani immagine complanari. Le telecamere
hanno l’asse x in comune. Supponendo per semplicità di considerare un oggetto al centro, fra
le due telecamere, è possibile risalire alle coordinate in tre dimensioni, adottando semplici
relazioni geometriche.
Al di là di una certa distanza la determinazione della Z risulta troppo approssimata (l’uomo
percepisce correttamente la terza dimensione entro una distanza limite di dieci metri).
3.1.3. CONTORNATURA
Tale metodologia è nota in letteratura anglosassone anche come “method of occluding
contours” o “shape from silhouettes” e consiste nel recupero della forma per mezzo dei
profili dell’oggetto osservato da diversi punti di vista.
Ciascuna telecamera, infatti, definisce una regione piramidale entro cui l’oggetto inquadrato
deve essere contenuto e la stima della geometria può essere ottenuta dall’inviluppo delle
regioni osservate dalle diverse telecamere.
Il primo passo è costituito dall’estrazione della silhouette dell’oggetto dalle immagini
acquisite ed è noto come segmentazione, spesso tale operazione viene facilitata utilizzando
sfondi di tonalità uniforme e diversa dal colore del corpo in esame.
- 9-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 10/18
Reverse Engineering Porf. Maurizio Muzzupappa
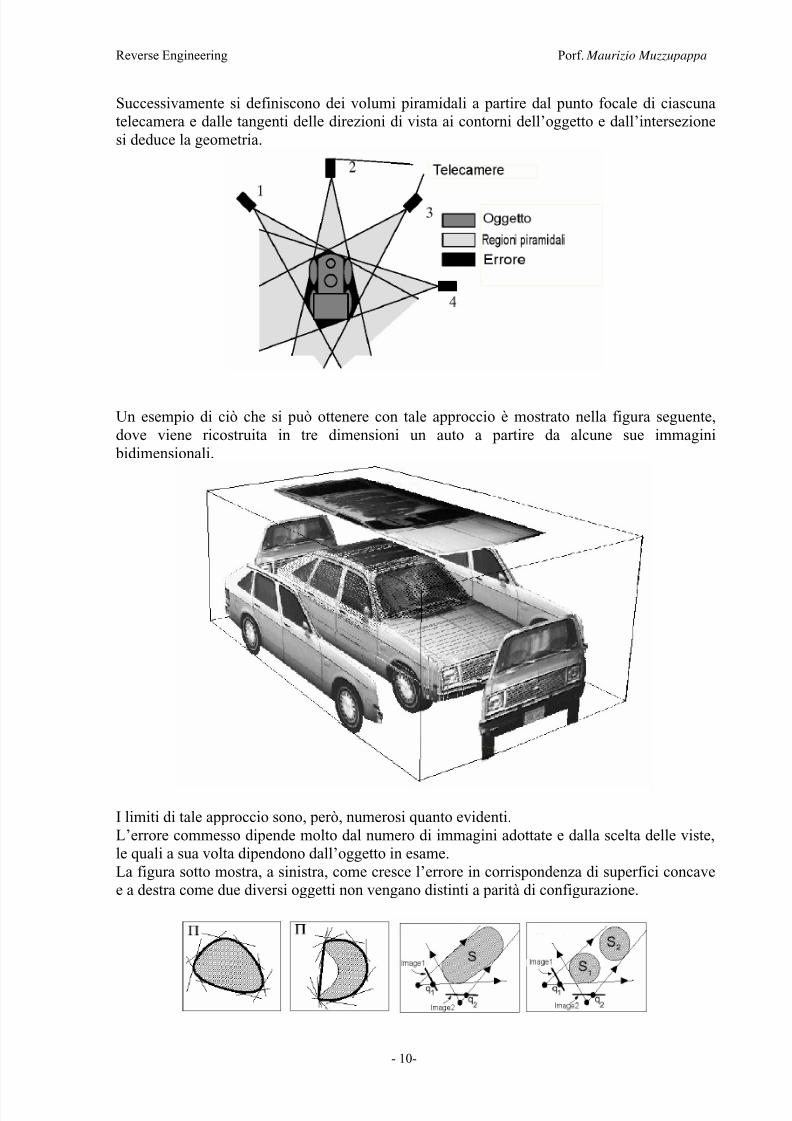
Successivamente si definiscono dei volumi piramidali a partire dal punto focale di ciascuna
telecamera e dalle tangenti delle direzioni di vista ai contorni dell’oggetto e dall’intersezione
si deduce la geometria.
Un esempio di ciò che si può ottenere con tale approccio è mostrato nella figura seguente,
dove viene ricostruita in tre dimensioni un auto a partire da alcune sue immagini
bidimensionali.
I limiti di tale approccio sono, però, numerosi quanto evidenti.
L’errore commesso dipende molto dal numero di immagini adottate e dalla scelta delle viste,
le quali a sua volta dipendono dall’oggetto in esame.
La figura sotto mostra, a sinistra, come cresce l’errore in corrispondenza di superfici concave
e a destra come due diversi oggetti non vengano distinti a parità di configurazione.
- 10-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 11/18
Reverse Engineering Porf. Maurizio Muzzupappa
3.2. METODI ATTIVI
Fra i metodi attivi generalmente si distinguono quelli che prevedono contatto fisico, in cui una
sonda interagisce con la superficie dell’oggetto, e quelli in cui si impiegano luce, onde sonore
o campi magnetici.
In ogni caso è necessario affrontare un’appropriata analisi dei valori assunti dalle diversegrandezze fisiche in gioco per determinare le coordinate dei punti.
Ciascun metodo ha punti di forza o di debolezza e l’adozione di uno o dell’altro dipende dalle
applicazioni a cui esso è destinato.
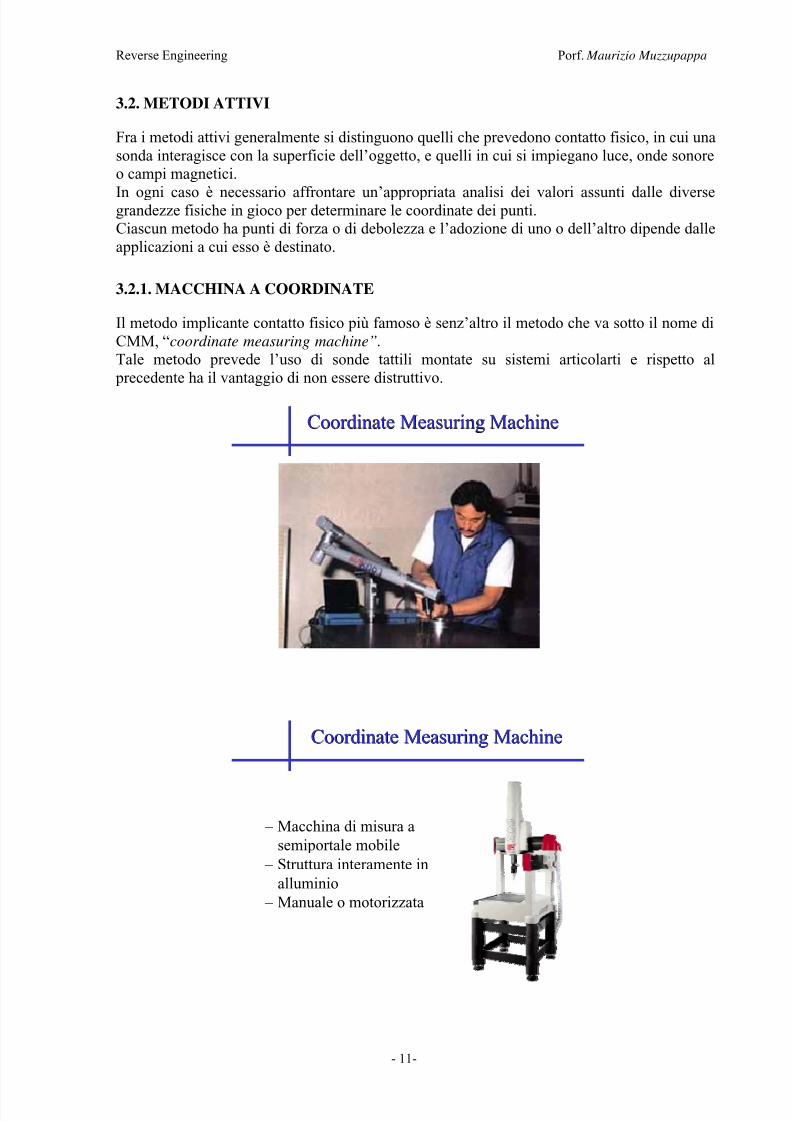
3.2.1. MACCHINA A COORDINATE
Il metodo implicante contatto fisico più famoso è senz’altro il metodo che va sotto il nome di
CMM, “coordinate measuring machine”.
Tale metodo prevede l’uso di sonde tattili montate su sistemi articolarti e rispetto al
precedente ha il vantaggio di non essere distruttivo.
CoordinateCoordinate MeasuringMeasuring MachineMachine
– Macchina di misura a
semiportale mobile
– Struttura interamente in
alluminio
– Manuale o motorizzata
CoordinateCoordinate MeasuringMeasuring MachineMachine
- 11-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 12/18
Reverse Engineering Porf. Maurizio Muzzupappa
– Macchina a portale mobile– Struttura mobile in alluminio
– Piano in granito
CoordinateCoordinate MeasuringMeasuring MachineMachine
A partire dalle dimensioni delle articolazioni e dagli angoli descritti rispetto ad una
configurazione iniziale è possibile risalire alle coordinate dei punti dell’oggetto in un dato
sistema di riferimento.
In commercio esistono svariati modelli di CMM di diversa precisione e costo, ciò li rende
appetibili per l’industria manifatturiera della quale sono oggi lo strumento standard per la
misura accurata della forma.
Essi soffrono però di diversi svantaggi, i principali sono:
- Estrema lentezza.
- Necessità di operatore umano esperto.
- Difficoltà di manipolazione.- Necessità di contatto fisico, non sempre possibile o auspicabile.
I metodi di rilevazione privi di contatto sono nati proprio per superare tali limiti.
3.2.2. METODO DISTRUTTIVO DEL SEZIONAMENTO
Tale metodo è scarsamente utilizzato dato che risulta essere totalmente distruttivo. Esso
prevede un processo inverso a quello impiegato dalle stampanti tridimensionali.
Mentre queste ultime da un modello digitale 3-D passano ad uno bidimensionale e
successivamente depositando strati successivi, di un dato materiale, realizzano un oggetto
reale, esso prevede prima il sezionamento del corpo e la scansione bidimensionale delle sue
sezioni e successivamente la sua ricostruzione digitale tridimensionale via software.
3.3. METODI ATTIVI PRIVI DI CONTATTO
I metodi attivi che vanno sotto questa categoria sono quelli che funzionano sul principio
comune di registrare l’energia trasmessa o riflessa dall’oggetto inviatagli precedentemente
sotto forma di onde.
- 12-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 13/18
Reverse Engineering Porf. Maurizio Muzzupappa
3.3.1. TOMOGRAFIA COMPUTERIZZATA
I metodi che si basano sulla riflessione dell’energia proiettata sono molteplici, ma solo uno
esiste basato sulla trasmissione e va sotto il nome di CT (Tomografia Computerizzata).
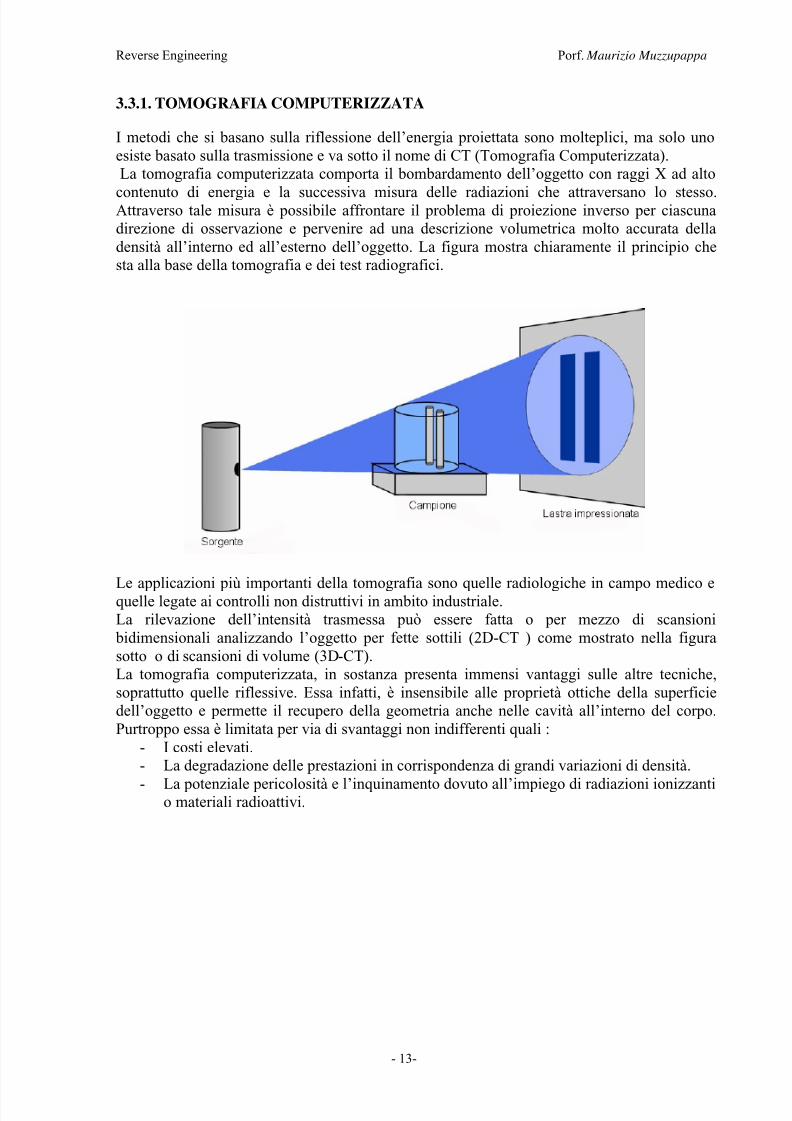
La tomografia computerizzata comporta il bombardamento dell’oggetto con raggi X ad alto
contenuto di energia e la successiva misura delle radiazioni che attraversano lo stesso.Attraverso tale misura è possibile affrontare il problema di proiezione inverso per ciascuna
direzione di osservazione e pervenire ad una descrizione volumetrica molto accurata della
densità all’interno ed all’esterno dell’oggetto. La figura mostra chiaramente il principio che
sta alla base della tomografia e dei test radiografici.
Le applicazioni più importanti della tomografia sono quelle radiologiche in campo medico equelle legate ai controlli non distruttivi in ambito industriale.
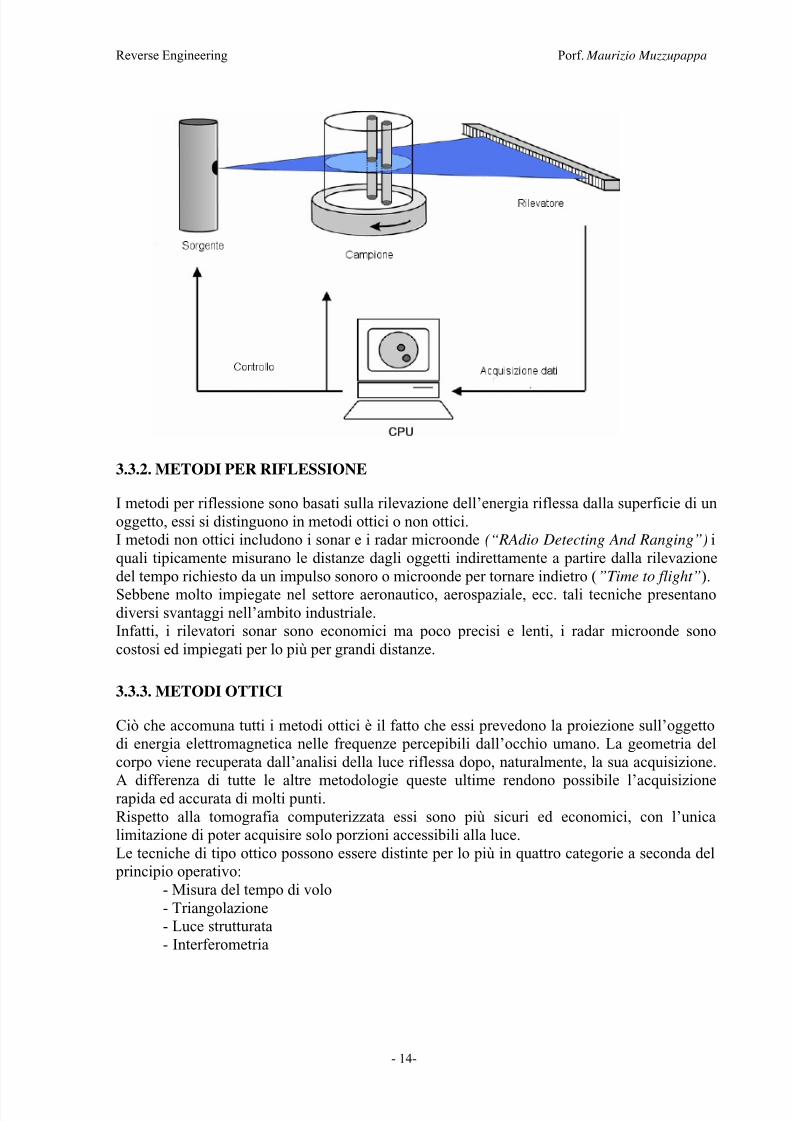
La rilevazione dell’intensità trasmessa può essere fatta o per mezzo di scansioni
bidimensionali analizzando l’oggetto per fette sottili (2D-CT ) come mostrato nella figura
sotto o di scansioni di volume (3D-CT).
La tomografia computerizzata, in sostanza presenta immensi vantaggi sulle altre tecniche,
soprattutto quelle riflessive. Essa infatti, è insensibile alle proprietà ottiche della superficie
dell’oggetto e permette il recupero della geometria anche nelle cavità all’interno del corpo.
Purtroppo essa è limitata per via di svantaggi non indifferenti quali :
- I costi elevati.
- La degradazione delle prestazioni in corrispondenza di grandi variazioni di densità.
- La potenziale pericolosità e l’inquinamento dovuto all’impiego di radiazioni ionizzantio materiali radioattivi.
- 13-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 14/18
Reverse Engineering Porf. Maurizio Muzzupappa
3.3.2. METODI PER RIFLESSIONE
I metodi per riflessione sono basati sulla rilevazione dell’energia riflessa dalla superficie di un
oggetto, essi si distinguono in metodi ottici o non ottici.
I metodi non ottici includono i sonar e i radar microonde (“RAdio Detecting And Ranging”) i
quali tipicamente misurano le distanze dagli oggetti indirettamente a partire dalla rilevazione
del tempo richiesto da un impulso sonoro o microonde per tornare indietro (”Time to flight”).
Sebbene molto impiegate nel settore aeronautico, aerospaziale, ecc. tali tecniche presentano
diversi svantaggi nell’ambito industriale.
Infatti, i rilevatori sonar sono economici ma poco precisi e lenti, i radar microonde sono
costosi ed impiegati per lo più per grandi distanze.
3.3.3. METODI OTTICI
Ciò che accomuna tutti i metodi ottici è il fatto che essi prevedono la proiezione sull’oggetto
di energia elettromagnetica nelle frequenze percepibili dall’occhio umano. La geometria del
corpo viene recuperata dall’analisi della luce riflessa dopo, naturalmente, la sua acquisizione.
A differenza di tutte le altre metodologie queste ultime rendono possibile l’acquisizionerapida ed accurata di molti punti.
Rispetto alla tomografia computerizzata essi sono più sicuri ed economici, con l’unica
limitazione di poter acquisire solo porzioni accessibili alla luce.
Le tecniche di tipo ottico possono essere distinte per lo più in quattro categorie a seconda del
principio operativo:
- Misura del tempo di volo
- Triangolazione
- Luce strutturata
- Interferometria
- 14-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 15/18
Reverse Engineering Porf. Maurizio Muzzupappa
3.3.3.1. MISURA DEL TEMPO DI VOLO
La tecnica che rientra sotto tale classificazione è definita in letteratura anglosassone “imaging
radar”. Essa come per il caso del radar a microonde si basa sulla rilevazione del tempo di
volo (tempo impiegato dalla luce per raggiungere l’oggetto e tornare indietro) e differisce da
quest’ultimo solo per le frequenze adottate per le onde elettromagnetiche.Per oggetti di grandi dimensioni esistono svariati sistemi che si basano su tale principio i quali
garantiscono prestazioni eccellenti. Sono, invece, poco utilizzati per oggetti nell’ordine di
grandezza di un metro in quanto, basandosi sul tempo di volo della luce, richiederebbero
circuiti ad alta velocità, dato che le differenze di tempo da rilevare sono dell’ordine del
femtosecondo (10E-12 sec).
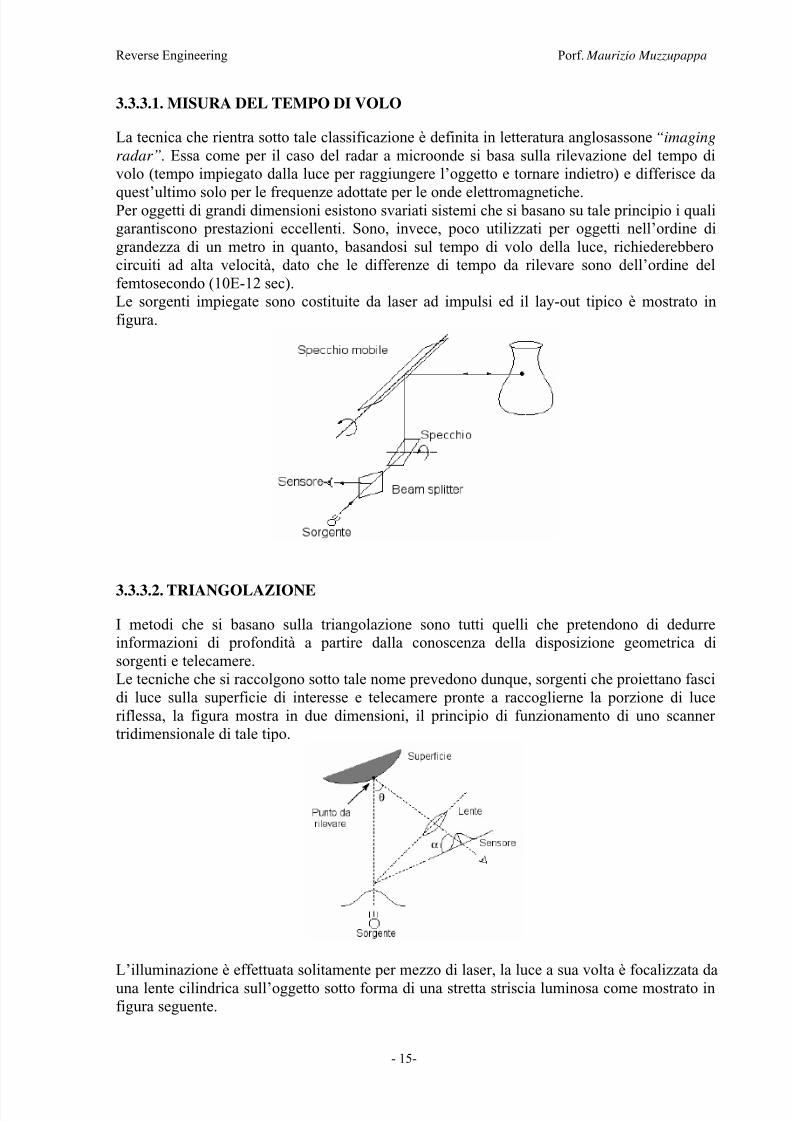
Le sorgenti impiegate sono costituite da laser ad impulsi ed il lay-out tipico è mostrato in
figura.
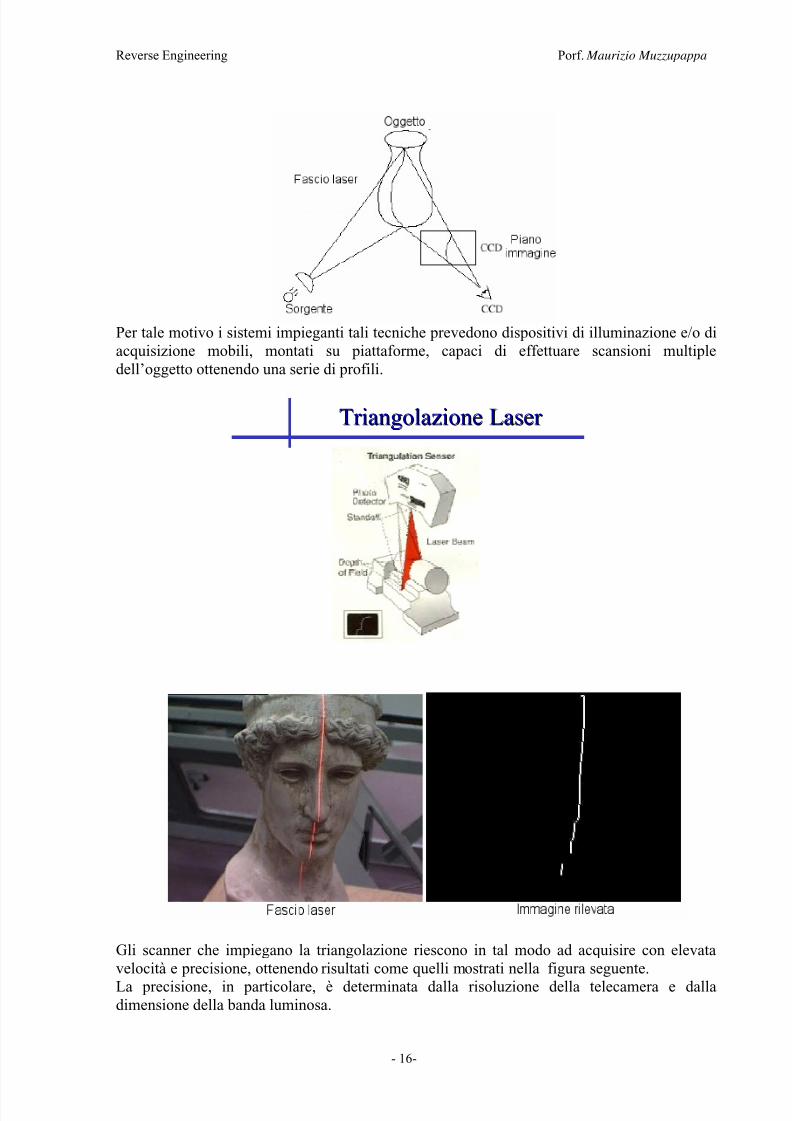
3.3.3.2. TRIANGOLAZIONE
I metodi che si basano sulla triangolazione sono tutti quelli che pretendono di dedurre
informazioni di profondità a partire dalla conoscenza della disposizione geometrica di
sorgenti e telecamere.
Le tecniche che si raccolgono sotto tale nome prevedono dunque, sorgenti che proiettano fasci
di luce sulla superficie di interesse e telecamere pronte a raccoglierne la porzione di luce
riflessa, la figura mostra in due dimensioni, il principio di funzionamento di uno scanner
tridimensionale di tale tipo.
L’illuminazione è effettuata solitamente per mezzo di laser, la luce a sua volta è focalizzata da
una lente cilindrica sull’oggetto sotto forma di una stretta striscia luminosa come mostrato in
figura seguente.
- 15-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 16/18
Reverse Engineering Porf. Maurizio Muzzupappa
Per tale motivo i sistemi impieganti tali tecniche prevedono dispositivi di illuminazione e/o di
acquisizione mobili, montati su piattaforme, capaci di effettuare scansioni multiple
dell’oggetto ottenendo una serie di profili.
Triangolazione LaserTriangolazione Laser
Gli scanner che impiegano la triangolazione riescono in tal modo ad acquisire con elevata
velocità e precisione, ottenendo risultati come quelli mostrati nella figura seguente.
La precisione, in particolare, è determinata dalla risoluzione della telecamera e dalla
dimensione della banda luminosa.
- 16-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 17/18
Reverse Engineering Porf. Maurizio Muzzupappa
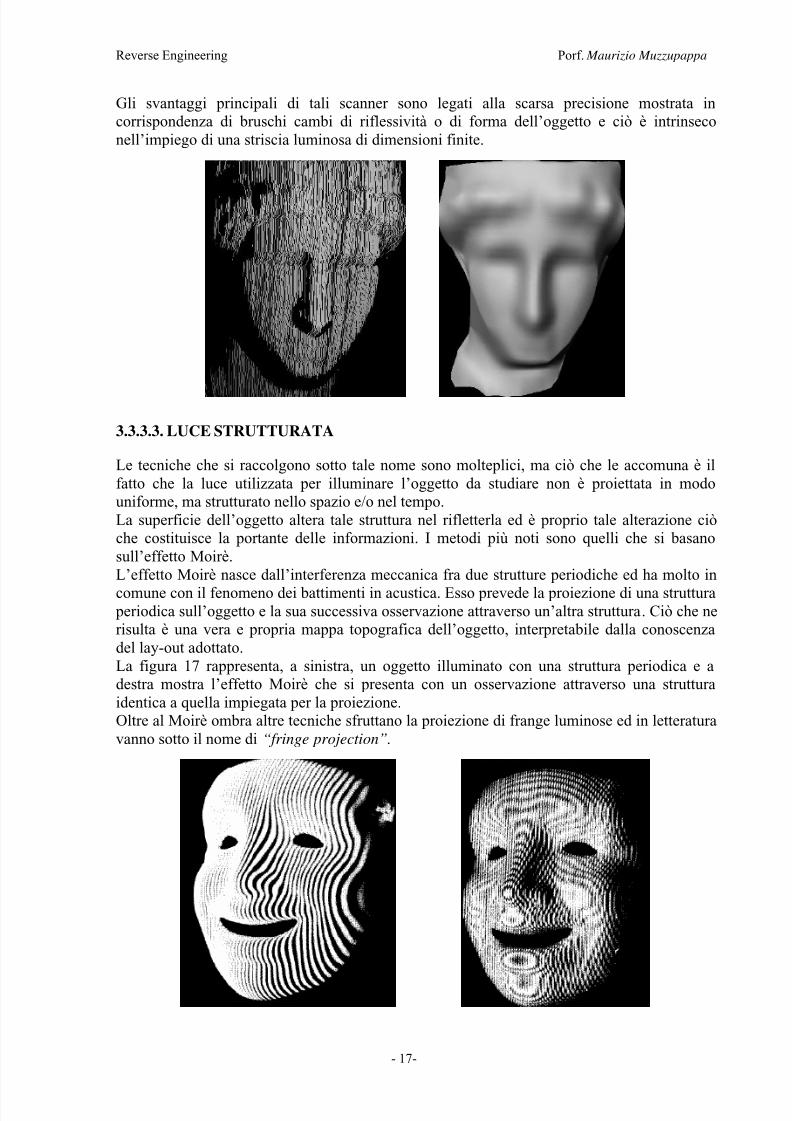
Gli svantaggi principali di tali scanner sono legati alla scarsa precisione mostrata in
corrispondenza di bruschi cambi di riflessività o di forma dell’oggetto e ciò è intrinseco
nell’impiego di una striscia luminosa di dimensioni finite.
3.3.3.3. LUCE STRUTTURATA
Le tecniche che si raccolgono sotto tale nome sono molteplici, ma ciò che le accomuna è il
fatto che la luce utilizzata per illuminare l’oggetto da studiare non è proiettata in modo
uniforme, ma strutturato nello spazio e/o nel tempo.
La superficie dell’oggetto altera tale struttura nel rifletterla ed è proprio tale alterazione ciò
che costituisce la portante delle informazioni. I metodi più noti sono quelli che si basano
sull’effetto Moirè.
L’effetto Moirè nasce dall’interferenza meccanica fra due strutture periodiche ed ha molto in
comune con il fenomeno dei battimenti in acustica. Esso prevede la proiezione di una strutturaperiodica sull’oggetto e la sua successiva osservazione attraverso un’altra struttura. Ciò che ne
risulta è una vera e propria mappa topografica dell’oggetto, interpretabile dalla conoscenza
del lay-out adottato.
La figura 17 rappresenta, a sinistra, un oggetto illuminato con una struttura periodica e a
destra mostra l’effetto Moirè che si presenta con un osservazione attraverso una struttura
identica a quella impiegata per la proiezione.
Oltre al Moirè ombra altre tecniche sfruttano la proiezione di frange luminose ed in letteratura
vanno sotto il nome di “fringe projection”.
- 17-
5/14/2018 7.Reverse Engineering - slidepdf.com
http://slidepdf.com/reader/full/7reverse-engineering 18/18
Reverse Engineering Porf. Maurizio Muzzupappa
Sistemi softwareSistemi software
• SDRC Imageware
• Alias Wavefront Studio
• CATIA
• Paraform
• RapidForm
EsempiEsempi
EsempiEsempi
- 18-