-
Modelarea sistemelor electromecanice
Curs 8/5
88.. MMOODDEELLAARREEAA MMAAIINNIIII SSIINNCCRROONNEE CCUU
MMAAGGNNEEII PPEERRMMAANNEENNII
8.1. MODELUL MATEMATIC AL MAINII SINCRONE CU MAGNEI
PERMANENI
Precum s-a artat n prealabil, datorit nfurrilor nchise la
colector i a periilor rotitoare, inductivitile utile sunt
independente de poziia rotorului, n cazul n care toate periile
mainii model sunt fixe fa de armtura cu poli apareni (rotorul
anizotrop datorit magneilor fixai n cazul mainii sincrone cu magnei
permaneni).
Astfel n cazul mainii sincrone cu magnei permaneni sistemul de
axe se fixeaz n rotor (sistem de axe de coordonate rotorice),
impunndu-se condiia: == rc (88.1) adic sistemul de axe se va roti
cu viteza fa de stator.
Pentru determinarea diverselor caracteristici statice i dinamice
ale mainii sincrone cu magnei permaneni se utilizeaz un model de
tip circuit, care const din ecuaii de tensiuni i relaii dintre
fluxuri i cureni. n cazul n care s-ar considera i efectul
saturaiei, ar trebui specificate suplimentar i funciile neliniare
care exprim variaia inductivitilor de magnetizare n funcie de
cureni.
La maina sincron cu magnei permaneni se determin dou ecuaii de
tensiuni din relaiile lui ud, uq, d/s, respectiv q/s,
obinndu-se:
dq
qsq
qd
dsd
tiRu
tiRu
++=
+=
(88.2)
unde cu indice d i q s-au notat mrimile statorice dup cele dou
axe ortogonale. Din relaiile lui d, dm i idm, respectiv q, qm i iqm
rezult cele dou relaii dintre fluxuri i cureni:
( ) ( )( ) Qqqqsq FDdddsd iMiML
iiMiML++=
+++= (88.3)
n care Ls este inductivitatea de dispersie a fazei statorice,
iar Md i Mq sunt inductivitile de magnetizare longitudinal,
respectiv transversal. n aceste relaii cu indicele F sunt notate
mrimile nfurrii de excitaie, iar indicii D i Q se refer la nfurrile
de amortizare dup cele dou axe reduse la stator.
Maina neavnd colivie de amortizare (iD=iQ=0) i introducnd
inductana sincron longitudinal dL :
dsd MLL += (88.4) i cea transversal qL :
-
Modelarea sistemelor electromecanice
Curs 8/5
qsq MLL += (88.5) se obine:
qqq
FdddiLiL
=+=
(88.6)
unde fluxul produs de magneii permaneni, flux considerat
constant, se definete din analiza funcionrii n gol a mainii la
sincronism:
s
qF
u
0= (88.7)
Expresia cuplului electromagnetic poate fi dedus dintr-un bilan
energetic: ( ) Fqqdqd ipiiLLpT += (88.8) Rezolvarea ecuaiilor (8.2)
i (8.6) se poate face doar cu apelarea tehnicii de calcul. Pentru
acesta n sistemul de ecuaii (8.2) trebuie separate derivatele:
qqSdq
ddSqd
uiRdt
d
uiRdt
d
+=+=
(88.9)
i nlocuite expresiile curenilor:
q
qq
d
Fdd
Li
Li
=
= (88.10)
obinndu-se relaiile de implementat pentru modelul mainii
sincrone cu magnei permaneni:
( )
qqq
Sd
q
dFdd
Sq
d
uLR
dtd
uLR
dtd
+=+=
(88.11)
Principalul avantaj al aplicrii acestui model const n faptul c
axele geometrice d i q sunt de fapt i axe de simetrie geometric la
maina sincron, de-a lungul crora parametrii mainii rmn constani.
Prin acesta se nltur o serie de dificulti serioase, care apar n
cazul studiului mainilor sincrone bazat pe metodele naturale (de
exemplu rezolvarea ecuaiilor mainii direct n coordonatele fazelor i
n domeniul de timp).
-
Modelarea sistemelor electromecanice
Curs 8/5
8.2. CONDUCEREA DUP CMP A MAINII SINCRONE CU MAGNEI
PERMANENI
Conducerea dup cmp al mainilor sincrone cu magnei permaneni
presupune n principiu decuplarea prin ortogonalitate spaial a
componentelor de cmp, respectiv de cuplu, ca i n cazul mainilor de
c.c. [1]. n aceast situaie variaia cuplului se realizeaz prin
modificarea componentei de cuplu. Dezavantajul metodei ar consta n
imposibilitatea de a regla factorul de putere. Mainile sincrone cu
magnei permaneni ns sunt de obicei de putere mic, fiind utilizate
ca i servomotoare, ca atare factorul de putere nu prezint importan
major.
La mainile sincrone cu magnei permaneni cel mai eficient mod de
orientare este dup fluxul rotoric, care dei nu se poate regla,
indic poziia rotorului. Comanda dup fluxul rotoric necesit
realizarea ortogonalitii dintre fluxul de excitaie ( E ) i curentul
statoric ( si ). Acesta se realizeaz doar atunci cnd se impune
condiia:
0=di (88.12) Dac rotorul se rotete cu viteza de sincronism, deci
= s atunci ecuaiile de tensiuni (88.2) devin:
dsqSq
qsdSd
iRu
iRu
+==
(88.13)
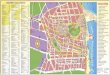
care se pot exprima sub form fazorial: sssss jiRV += (88.14)
unde fluxul statoric este: qqFs ijL+= (88.15)
Diagrama fazorial obinut pentru funcionarea mainii sincrone n
regim permanent cu id =0 este dat n Figura 8.1 .
n consecin cuplul electromagnetic dat de ecuaia (88.8) va fi
proporional cu valoarea curentului iq, adic: FqipM = (88.16)
Considernd fluxul de excitaie constant i curentul din axa d nul,
cuplul
s
v js s s
M id F
jL iq q
q
d
i jis q= = 0
Figura 88.1. Diagrama fazorial pentru funcionarea
mainii sincrone n regim permanent cu id =0
-
Modelarea sistemelor electromecanice
Curs 8/5
electromagnetic variaz liniar n funcie de curentul din axa q,
deci nu se pune problema determinrii unei valori maxime a acestuia.
n figura 8.2 este dat schema bloc pentru realizarea principial a
unui sistem de control cu orientare dup cmpul rotoric n ipoteza
valorii zero a curentului din axa d. Sistemul de control este
destinat reglajului de vitez.
Alimentarea mainii sincrone cu magnei permaneni se realizeaz cel
mai eficient printr-un convertor cu circuit intermediar de c.c.
avnd un invertor n regim de modulaie (de tip PWM Pulse Width
Modulation). Acesta avnd un caracter de surs de curent asigur un
curent sinusoidal la ieirea sa [2]. Pentru comanda invertorului
sunt implementate n schem trei regulatoare de curent cu histerezis
foarte rapide, care asigur un rspuns n curent practic instantaneu.
Posibilitatea reglrii rapide a curentului este asigurat de existena
unui plafon suficient de tensiune la invertor. Sistemul de comand
mai conine traductor de poziie, traductoare de curent, regulator de
vitez de tip PI, precum un bloc de calcul pentru transformarea de
coordonate (a, b, c) n (d, q, 0) avnd o singure mrime la intrare (
*qi ), celelalte (
*di i
*0i ) fiind zero.
Relaiile curenilor impui pentru cele trei faze ale mainii se
obin cu ajutorul matricei de transformare Park dq0P a sistemului
trifazat (a, b, c) n sistem ortogonal
(d, q, 0) [3]:
Figura 88.2. Schema bloc a unui sistem de control cu orientare
dup cmpul rotoric n
ipoteza id=0
-
Modelarea sistemelor electromecanice
Curs 8/5
( )*****
**
32sin
32
sin32
bac
qb
qa
iii
ii
ii
+=
=
=
(88.17)
Pentru realizarea frnrii recuperative (a trecerii mainii n regim
de generator) trebuie schimbat semnul curentului *qi , obinndu-se
astfel schimbarea semnului curenilor
impui n sistemul (a, b, c).
8.3. BIBLIOGRAFIE
1. VIOREL I.A. IANCU V.: Maini i acionri electrice, Lito IPC-N,
1990. 2. KELEMEN . IMECS M.: Sisteme de reglare cu orientare dup
cmp ale mainilor
de curent alternativ, Ed. Academiei, Bucureti, 1989. 3. RSLER
E.: Comanda cu calculator numeric a mainilor electrice n sistemele
de
acionare, Tez de doctorat, Universitatea Tehnic din Cluj-Napoca,
1997.











![[XLS] · Web view8 8 4 8 8 8 8 8 8 8 8 8 8 8 8 8 8 8 8 8 8 3 8 8 8 8 8 8 8 8 3 8 8 8 8 8 8 3 4 3 8 4 7 8 8 6 5 7 8 8 8 8 8 8 8 3 8 8 3 8 8 8 3 4 8 8 8 8 8 8 8 8 8 3 4 8 8 8 8 8 3 3](https://img.pdfslide.tips/doc/110x75/5ab00b917f8b9a3a038e2f48/xls-view8-8-4-8-8-8-8-8-8-8-8-8-8-8-8-8-8-8-8-8-8-3-8-8-8-8-8-8-8-8-3-8-8-8-8.jpg)