Embed Size (px)
Citation preview

CAP ÍTULO
oordenadas cartesianas rectangulares rotación de ejes
1.1 Coordenadas cartesianas rectangulares
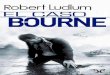
Desde u n pun to fijo O, al que se le llamará origen de coordenadas, se trazan tres rectas fijas Ox, Oy y Oz perpendiculares entre sí, como en la F i g . 1. A estas rectas se las l l a m a eje x, eje y y eje z, respectivamente; y en con junto se les denomina ejes cartesianos rectangulares Oxyz. L o s planos Oyz, Ozx y Oxy se l l a m a n planos coordenados, o también p l ano yz, p lano zx y p lano xy respectivamente.
x
Fie. 1. Coordenadas cartesianas rectangulares.
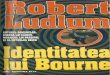
Se acostumbra elegir los ejes de tal manera que Ox, Oy y Oz f o rmen u n sistema derecho, en ese o rden . Esto signi f ica que para u n observador que m i r e en la dirección Oz, el sent ido de l arco menor de u n pun to sobre Ox a u n p u n t o sobre Oy es e l de las maneci l las de l re lo j . L a F i g . 2(a) i lus t ra esto y la F i g . 2(b) muestra l a relación de la F i g . 2(a)
13

14 Coordenada» cartesiana* ra tarif'iilarrr y rotación de ejet
con l.i mano derecha Nótese que para un observador que m i r e en l a d i r ea ¡ón Ox, el lenticlo del arco menor de Oy a Oz es e l de las mane-( i l l . is del reloj; j para un observador que mire en l a dirección de Oy, e! ( n u d o del mío menor de Oz a Ox es e l de las manec i l l as de l relo).
Los tres e n u n c i a d a respecto a los observadores que m i r a n en l a dirección de los ejes i rspectivos, i m p l i c a n u n a simetría cíclica en x, y y x; es decir, si en cua lquiera de los tres enunciados, se substituye a x po r y, y por z y z poi K, entonces se obt iene u n o de los otros dos. A l a operai ion de l u b s t i t u i l .1 x por y, y po r z y z por x se le l l a m a intercambio cíclico entre x, y y z.
L a posición de un punto P con respecto a u n sistema dado de ejes cartesianos rectangulares, se especifica de la manera s iguiente: se d i b u j an las perpendiculares PL, PM y PN que van desde P a los planos yz, zx y xy respectivamente, como en la Kig. I. Sea:
x = ± la l ong i tud de PL,
Fio. 2. (a) La flecha indica un giro en el sentido de las manecillas del reloj, como la vería un observador desde la dirección Oz (b) Relación con la mano derecha.
siendo de signo pos i t ivo cuando P y Ox están situado» en el m i smo lado de l p l ano yz y de s igno negativo e n easo contrar io . Si m i lar mente, se de f inen :
y = ± la l ong i tud de PM, z = ± la l ong i tud de PN,

Coordenadas cartesiana» rectangulares 15
pr.
•c toma el signo positivo o negativo para y dependiendo de que P y Oy •ten situados sobre el mismo lado o sobre el opuesto de l p lano zx; y el signo positivo o negativo para z según P y Oz están situados sobre el mismo lado o sobre el opuesto de l p l ano xy. A los números x, y y z se les llama coordenada x, coordenada y y coordenada z de P. A P se le denomina como e l punto (x, y, z).
U n a observación e lemental es que, cuando se d a n x, y y z, la posición P con respecto a los ejes queda de terminada de manera única. Recí-
rocamente, cuando se d a u n p u n t o P, éste de termina u n a tríada única de coordenadas. E n otras palabras, hay una correspondencia de uno a uno entre los puntos P y las tríadas de números reales (x, y, z).
Distancia al origen. Para ha l l a r la d istancia desde P a l or igen O, construyase el paralelepípedo rectangular que tenga como lados a PL, PM y PN (Fig. 3). Po r el teorema de Pitágoras, se tiene que:
OP2 = ON2 + PN2
= PU + PM2 + PN2.
M
/
T
/ p / L / L
/ o /
Fie. S. Construcción pan hallar la distancia OP.
Puesto que las distancias perpendiculares desde P a los planos coordenados son |x|, |y¡, ¡z|, se deduce que:
OP = V ( x - +y 2 +z 2 ) . 1-1)

16 (loordenwlan i-artesianas rectangulares y rotación de ejes
Distancia rutic punios, l a d is tanc ia , entre los puntos P(x, y, z) y /" (x\ y', z') se obt iene de la manera siguiente. Se d i b u j a n tres ejes coordenados nuevos PX, PY y PZ que pasen por P y que sean parale los a los ejes or ig inales Ox, Oy y Oz, como se muestra en l a F i g . 4. S i X, Y y Z, son las coordenadas de Pf c on respecto a estos nuevos ejes, entonces es fácil ver que :
X = x' - x, Y = / -y, Z = zf - z
A p l i c a n d o el resultado (1.1),
PF = > / ( X 2 + K 2 4 - Z 2 ) f
y en términos de las coordenadas con respecto a los ejes or ig inales,
pp> = v u * ' - * ) 2 + (/ - y)2 + P - z)2h (Í45)
/
Fie. 4. Construcción para hallar Pf*. Rk
EJERCICIOS
1. Demostrar que la distancia entre los puntos (5. 4, 2) y (0, 3, 1) es 3 y/ 3.
2. Demostrar que la distancia desde el punto {a — b, a + b, c) al origen es V (2a2 + 262 + c2).
3. Hallar los puntos del plano xy que están a una distancia unitaria desde el origen y sean equidistantes a los ejes X y y.

Cosenos directores y razones de dirección 17
\ Hallar los puntos que están a una distancia de 5 unidades desde el origen y cuyas distancias a los planos xy y zx, son 2 V 2 unidades.
5. Hallar los puntos que están a una distancia de i \/ 2 desde cada eje.
6. Hallar la distancia entre a) los puntos (1, —I, 0) y (1, 2, 4) 6) los puntos (3. - 1 . 2) y ( -1, 5, - 1 ) .
• 7. Las coordenadas de un punto O' con respecto a los ejes cartesianos rectangulares Ox, Oy y Oz son (1, I, —1). Tomar los nuevos ejes O'x', O'y' y O'z' que pasen por O', tal que, sean paralelos a los ejes originales respectivamente. Hallar las coordenadas de O con respecto a los nuevos ejes. Si un punto P tiene coordenadas (—1, 2, 0) con respecto a los nuevos ejes, hallar sus distancias perpendiculares desde los planos xy, xz y yz.
8. Hallar la longitud del perímetro del triángulo cuyos vértices están situados en los puntos (1, 0, 0) , (0, 1, 0) y (0, 0, 1).
1.2 Cosenos directores y razones de dirección
Cosenos directores. Sea OP u n a recta or i entada desde O (el origen) a u n pun to P, y represéntense por a, (3, y los ángulos tpie OP forma con Ox, Oy y Oz (Fig. 5). L o s cosenos directores de OP se de f inen como eos a, eos fi y eos y. P o r convenienc ia se escr iben:
l = eos a, ra = eos (3, n = eos y. (1-3)
Por ejemplo, los cosenos directores de l eje x son 1, 0, 0. i n d i q u e por A T el p i e de la perpend icu lar desde P a l eje x, sea OP = r,
y suponga que las coordenadas de P son (x, y, z). P o r el triángulo OPN se tiene que ON = \x\ = r|cos a|. También si a es u n ángulo agudo, tanto eos a como x son posit ivos, mientras que si a es u n ángulo obtuso eos a y x son ambos negativos. D e aquí se deduce que x = r eos a, y análogamente se demuestra que y = r eos P y z — r eos y Po** tanto, los cosenos directores de OP son
B l ==, x/r , m — y/r, n — z¡r. (1-4)-
Puesto que r 2 = x 2 4 y2 + z2, se t iene
l1 -f- m2 + n2 = 1. (1.5)
Es to demuestra que los cosenos directores de u n a recta no son independientes: deben satisfacer l a ecuación (1.5).
P o r detinición los cosenos directores de u n a recta W que no pasa por el or igen son los mismos que los de l a recta para le la trazada desde e l o r i gen con el m i smo sentido que

18 Coordenadas cartesianas rectangulares y rotación de ejes
z
X
Fíe 5. La recta OP forma ángulos o, p. y con los ejes.
Razones de dirección. Cuando tres números cualesquiera a, b y c, son tales que:
a:b:c = l:m:n (1.6)
se les llama razones de dirección de OP. Si la ecuación (1.6) se verifica, se tiene
/ = a/d, m = b/d, n = c\d, (1.7)
que sustituidos en la ecuación (1.5),
d= ± V ( « 2 + & 2 +^ ) - ( L 8 )
L a elección de signo en (1.8) indica que hay dos conjuntos posibles de cosenos directores correspondientes a cada conjunto dado de razones de dirección. Estos conjuntos de cosenos directores corresponden a rectas paralelas con direcciones opuestas.
EJERCIOOS
9. Demostrar que los cosenos directores de la recta que une el origen con el punto (1, —4, 3) son:
1/V26, -4/V26 , 3/V26.

Angulo entre rectas que pasan por el origen 19
lo. Hallar los cosenos directores de la recta que une el origen con el punto •¿. 5) •
II Una recta forma ángulos de 60° con el eje x y el eje y, y está inclinada en fulo obtuso con el eje z. Demostrar que sus cosenos directores son J, \, —¿\/2 y terminar el ángulo que forma con el eje z.
l " Hallar los cosenos directores de la recta que equidista de los tres ejes y está el ociante positivo x ^ 0, >• ̂ 0 y z ̂ 0.
13. Hallar las razones de dirección de la recta que forma ángulos de 45° con el 1 x y el eje y, y está situada en el octante positivo.
..'t Ángulo entre rectas que pasan por el origen
Cons idere dos rectas O A y OA', con cosenos directores /, m , n y V, ', n'. P a r a h a l l a r el ángulo 0 entre ellas, represente por B y B' a los untos de OA y OA' (si es necesario en su prolongación) ta l que B = OB' = 1 (Fig. 6 ) . Entonces de l a ecuación (1.4) cuando r = 1
as coordenadas de B y B' son (/, m, n) y ( m', nr). A l ap l i car l a ley "e los cosenos a l triángulo OBB', se t iene:
OB2 + OB'2 - BB'2
eos 6 = = 1 -IBB'2. '20BOB'
ero por (1.2),
BB'2 = {V - l)2 + (m' - m)2 + (n' - n ) 2
= (V2 + m'2 + n'2) + (l2 + m2 + n2) - 2(11' + mm' + nn').
I isando los resultados l2 + m2 + n2 = 1 y l'2 + m'2 + n'2 = l, se obtiene:
eos 6 = IV + mm' + nn'. (1.9)
Observe que, cuando se toma e l ángulo entre OA y OA' i gua l a — $, también se obt iene (1.9), porque eos (2JI — 6) = eos 6.
Fie. 6.

20 Coordenadas cartesianas rectangulares y rotación de ejes
Condición para rectas perpendiculares. Dos rectas que pasan p o r e l o r i gen son perpendiculares s i y sólo s i
I/' + m m ' - + n n ' = 0. (1.10)
Demostración. Las dos rectas OA y O A' son perpendiculares si y sólo si 0 =\x ó 6 = f jt, es decir, si y sólo si eos 9 = 0. E l resul tado se deduce de (1.9).
EJERCICIOS
14. Demuestre que el ángulo entre las rectas cuyos cosenos directores ion A.\/2>
¿V'2. 0 y JV3 . I V . « c ™ - 1 W6-
15. Demostrar que las rectas cuyos cosenos directores son l\/2, 0, \y/2 y h^'¿< 0, — son perpendiculares.
16. Hallar el ángulo entre dos diagonales cualesquiera de un cubo. [Sugerencia. Elija los ejes convenientemente con el origen en el centro del cubo.]
1.4 L a proyección o r t o g o n a l de u n a r ec ta s o b r e o t r a
Sean dos rectas OP y OA un idas po r u n ángulo 9. Entonces se de f ine l a proyección or togona l de OP sobre OA como OP eos 9 (Fig. 7 ) .
Nótese que si A ' es e l p i e de la perpend icu lar desde P a OA (si es necesario en su prolongación más allá de O o de A), entonces ON = OP |cos 0\.
E n la sección 1.2 se demuestra que las proyecciones de OP sobre los ejes cartesianos rectangulares con or igen O son las coordenadas x, y y z de P con respecto a estos ejes. Este resultado se ext iende ahora para ha l l a r la proyección de OP sobre u n a recta OA l a cua l no necesariamente es parte de uno de los ejes coordenados.
Sean l, m, n los cosenos directores de O A y P e l p u n t o (x, y, z). E n tonces la proyección ortogonal de OP sobre O A es
Ix + my + nz.z ( l i l i )
Demostración. P o r las ecuaciones (1.4), los cosenos directores de OP son x/r , yfr y z/r, donde r = OP. D e ahí que, por l a fórmula (1.9), el ángulo 9 entre OP y OA esté dado por
eos 9 = (Ix + my + nz)/r.
L a expresión (1.11) se deduce inmediatamente de l a definición de proyección or togona l de OP sobre O A.

Rotación de ejes 21
Fie. 7. ON es la proyección ortogonal de OP sobre la recta O A.
EJERCICIOS
17. Los puntos A y B, tienen coordenadas (1, 4, —1) y (— 1, 3, 2) , respectivamente. O es el origen, hallar el punto P producido sobre OA de tal manera que la
proyección de OP sobre OB sea de una longitud igual a 9^/14/7.
18. Una recta OP une el origen O con el punto P (3, 1, 5). Demostrar que la proyección ortogonal de OP sobre la recta en el octantc positivo y que forma ángulos iguales con los tres ejes, es 3\/3.
—^ 19. Los pies de las perpendiculares desde el punto (4, —4, 0) a las rectas que
pasan por el origen y cuyos cosenos directores son (iy/2, iy/2, 0) y (J, §, §), están representados por N y N'. Hallar las longitudes de ON y ON', donde O es el origen, y explique por qué una de éstas es cero.
1.5 Rotación de ejes
La matriz de transformación y sus propiedades. Cons idere dos sistemas
de ejes cartesianos rectangulares derechos Oxyz y Ox'y'z'. Es fácil ver que,
por u n mov im ien to c on t inuo adecuado con respecto a O, e l sistema de
ejes Oxyz (con Ox, Oy y Oz s iempre fijos entre sí) se puede poner
en co inc idenc ia con e l sistema Ox'y'z!. A tal mov im i en to se le llamará
una rotación de ejes.

22 1'inn IIIIUUIIIH 4ni Irnimui* rvi lait£uluns y niliuiiin dé eje»
Fie. 8. Una rotación de ejes.
Observe que, si u n sistema de ejes es derecho y e l otro i zquierdo , es impos ib l e ponerlos en co inc idenc ia por u n a rotación. Es conveniente denominar a Oxyz como ejes or ig inales y a Ox'y'z' c omo ejes nuevos.
Sean /„, l12 y l13 los cosenos directores de Ox' c on respecto a los ejes Oxyz.
Además, i n d i q u e por l21, l22, l23 y hv hs l o s cosenos directores de Oy' y Oz'. Esto se resume adecuadamente en la disposición siguiente:
0 X y z
x' tu i» i Í21 i22
2? /,s
E n este arreglo, los cosenos directores de Ox' c on respecto a los ejes Oxyz aparecen en la p r imera f i la , los de Oy' en l a segunda y los de Oz* en l a tercera. Además, si se leen hac ia abajo las tres co lumnas a su vez, es fácil ver que se ob t i enen los cosenos directores de los ejes Ox, Oy, Oz con -respecto a los ejes Ox'y'z'. L a disposición de cosenos directores en (1.12) se l l a m a matriz de transformación.
Puesto que los ejes Ox', Oy' y Oz' son perpendiculares entre sí,
t M Z 3 l + llt l„ + Í M 7 2 3 = 0,
2̂1 3̂1 "f* l-ll 'j2 "T* 2̂3 3̂3 = 0, (1.13)
hx hi + 1» + L '13 = 0.

Rotación de ejes 23
imbién de la sección 1.2, se sabe que las sumas de los cuadrados de los cosenos directores son iguales a la unidad, y así tenemos:
4 + 4 + 4 = 1.
4 + 4 + 4 = 1 .
4 + 4 + 4 = 1 -
(1.14)
las seis ecuaciones en (1.13) y (1-14) se les llama relaciones de orto-ormalidad. Observe cómo se establecen en la disposición (1.12). Puesto que los elementos de las columnas forman los cosenos direc-
lores de los ejes Ox, Oy y Oz con respecto a los ejes Ox 'yV, se deduce |x>r argumentos similares que
' n + *2i *n + hi ht = 0, /,* + í » + 1» hrn = 0,
hi + h* '21 + '33 hx = 0; (1.15)
4 + l\x + 4 = n
4 + 4 + 4 = 1.
4 + 4 + 4 = i -
(1.16)
las ecuaciones (1.15) y (1.16) son una forma alternativa importante de las relaciones de ortonormalidad. Se pueden deducir de las ecuaciones (1.13) y (1-14) por un argumento puramente algebraico.
La matriz de transformación satisface una condición más, la cual aparece por el hecho de que tanto el sistema Oxyz como el sistema Ox'y'zf
T = l 12 Í22 Ks
Í23
(El lector inexperto en determinantes, encontrará en el Apéndice 1 de este libro una explicación de toda la teoría necesaria.)
Si se indica el determinante transpuesto de T por T', se tiene
T* = TT = Ixx
I* Í23 x |/I2
kx
/=2 *2,
De ahí que, al multiplicar los dos determinantes y usar las condiciones de ortonormalidad (1.13) y (1.14),

24 Coordenada» cartesiana» rectangulares y rotación de ejes
T2 = 1 O O O 1 O O O 1
= 1.
E n este caso T = ± 1 . A h o r a b ien, cuando los ejes Oxyz y O x ' y V co inc iden, es fácil ver que
los valores apropiados en la disposición (1-12) son lif = 1 cuando i = ; y li} = 0 cuando i =fc;'; y para este caso pa r t i cu la r
T = i 0 0 0 1 0 0 0 1
= 1.
S i los ejes se hacen g irar fuera tle co inc idenc ia , los cosenos directores lu variarán durante la rotación de manera c on t inua (es decir , " n o con saltos súbitos" en va l o r ) , y como el determinante T es la suma de los productos de los cosenos directores, su va lor también variará cont inuamente. Pero en todos los pasos de la rotación T = 1 ó — 1, y así sucesivamente, T debe tomar el va lor de 1 ó — 1 a través de la rotación para que no ocurra d i s con t inu idad en el va lor . Puesto que T = 1 cuando los dos sistemas coordenados co inc iden, se deduce que en todas las posiciones
T = 1̂1 1̂2 1̂3
/2X l-¿2 2̂3 3̂1 3̂2 's3
= 1. (1.17)
Ésta es la condición ad i c i ona l que debe satisfacer la matr i z de transformación.
Se ha visto (pie, si las componentes de la disposición (1.12) son los cosenos directores de los ejes nuevos con respecto a los ejes or ig inales, las condiciones (1.13), (1.14) y (1.17) necesariamente se satisfacen. Estas condic iones son también suficientes para la disposición que represente u n a rotación de los ejes derechos Oxyz. E n pr imer lugar, si se satisfacen las ecuaciones (1.13), los ejes Ox', Oy' y Oz' son perpendiculares entre sí; segundo, si se satisfacen las ecuaciones (1.14), las filas en la matr iz de transformación representan a los cosenos directores de Ox', Oy' y Oz'\ y f ina lmente si se satisface la ecuación (1.17), e l sistema Ox'y'z' es derecho.
Transformación de coordenadas. Sea u n punto P de coordenadas (x, y, z) y (x', y', z') c on respecto a los ejes Oxyz y Ox'y'z* respectivamente. L a s coordenadas x', y' y zf de P son las proyecciones de OP sobre Ox', Oy' y Oz*. De ahí que, si se emplea (1.11) para calcular las, se obt iene

Rotación de ejes 2a
x ' = / M x + llty + liaz, y' = l2lx + l22y + l23z, (1.18)
z 7 = *3* * + l32 y + l33 z.
i laciones (1.18) demuestran cómo las coordenadas de P se trans-I.III de acuerdo a la rotación de los ejes; note también que estas
(presiones son establecidas por la disposición (1.12). Toi supuesto, se podría considerar a los ejes Ox'y'z' como el sistema
rinal y a los ejes Oxyz como el sistema nuevo y de t e rminar las coor-udas (x, y, z) en términos de (x' f y', zT). Recuerde que los elemen-<!<• las co lumnas en (1.12) son los cosenos directores de los ejes y z con respecto a los ejes Ox'y'z!, y emp leando (1.11) se deduce que
x = lxlx' + l2ly' + lxlz',
y = ti2x' + l22y' + h2z', (1.19)
z = í,3 * ' + h3 y' + 3̂3
mío u n ejercicio, e l lector puede ver i f icar que las ecuaciones (1.19) ibién se deducen de (1.16) resolviéndolas algebraicamente pa ra x ,
y z. ,
EJERCIC IOS
1. Dos sistemas de ejes Oxyz y Ox'y'z' son lales que el primero se puede colocar la posición del segundo por una rotación de 180° con respecto al eje x. Escriba
«11 vez en la forma de la disposición (1.12) el conjunto de cosenos directores los lies corr<*spondcn a esta rotación. Si un punto tiene coordenadas (1, 1, 1) respecto
ejes Oxyz, hallar sus coordenadas respecto a los ejes Ox'y'z'.
II. Un sistema de ejes Ox'y'z' coincide inicialmcntc con el sistema Oxyz. El sis-la Ox'y'z' se gira entonces a través de un ángulo 8 con respecto al eje z, y la
ireccióu de ¡a rotación va del eje x al eje y. Demostrar que
x' = x eos 0 + y sen 0, .y' — —x sen 0 + yXos 6, z' = z.
[SugerriK¡¡1. Considere los cosenos directores de los ejes nuevos, y emplee las ecua-1 iones (1.18).]
"-^2. Demuestre que las siguientes ecuaciones representan una rotación de un sis-lema de ejes con respecto a un punto fijo:
x' — x sen 6 eos 0 -f y sen 0 sen tp + z eos 0, y' = x eos 0 ios <p + y eos 0 sen tp — z sen 0. z' — —x sen tp + y eos tp.
[Sugerencia. Demuestre que los coeficientes de x, y y z, satisfacen a (1.17) y a las tundiciones de ortonormalidad.]

26 Coordenadas cartesianas rectangulares y rotación de ejes
23. Resuelva las ecuaciones del ejercicio 22 para x, y y z en términos de x', y' y z\ [.Sugerencia. Multiplique la primera ecuación por sen 6 eos tp, la segunda por eos 0 ios </> y la tercera por —sen <p y sume para obtener
x = x' sen 8 eos tp + y' eos 8 eos <p — z' sen tp.
Simi lamiente para y y z.j
_> 24. De acuerdo a la disposición de la transformación (1.12) demostrar que:
1̂1 = 2̂2 3̂3 '23 ^32' 'l2 = 2̂3 3̂1 _ '21 '33* 'l3 = 2̂1 3̂2 "~ 2̂2 11*
Escriba a su vez dos conjuntos de tres relaciones similares. [Sugerencia. Por el empleo de (1.17), demuestre que si l „ , L . y / J 3 tienen los valores dados anteriormente, entonces, l2
x + l2.¿ + / 23 = 1. La solución a este ejercicio se da en las respuestas que apa
recen al final del libro.]
1.6 L a convención de suma y su uso
Es posib le s imp l i f i ca r e l enunc iado de las ecuaciones (1.18) y (1.19) si se c lasi f ican nuevamente las coordenadas (x, y, z) como ( x „ x 2 , x 3 ) y (x', / , z') como (x', x ' , x 3 ) . C o n este camb io de notación, las ecuaciones (1.18) serán
* ' l = hi *1 + 'l2 *2 + '.3 *3 = £ x} (1.20)
y
* * = ¡2t**,*P ( » 2 1 )
*> = J , ^ * > (1*2 )
las ecuaciones (1.20) a (1.22) se pueden abreviar en la forma
x\= £1»** « = 1 . 2 , 8 . (1.23)
Similarmente, las ecuaciones (1.19) se reducen a la forma
x ^ J ^ x ' , , i = 1 . 2 , 3 . (1.24)
E n las ecuaciones (123) y (124) aparece dos veces el índice / en las sumas, y l a suma se efectúa con los tres valores posibles del mismo. C o m o esta situación ocurre con mucha frecuencia, es conveniente adoptar u n a convención que a menudo evite la necesidad de escribir signos de suma.

ixi convención de suma y su uso 27
CONVENCIÓN DE SUMA . S iempre y cuando aparezca dos veces u n índice ii la m i sma expresión, d i cha expresión se sumará con todos los valores
sildes de d i cho índice. C o n el empleo de l a convención de suma, las ecuaciones (1.23) y
1.24) serán s implemente
x\ = lijXj, (1.25)
sobreentiende que cuando se emplee u n solo índice en u n a ecuación 1 como i sobre los lados i zqu ie rdo y derecho de (1.25) y (1 .26) ) es
álida para cada va lor de ese índice. E l lector notará que las ecuaciones [1.25) y (1.26) son m u c h o más elegantes y adecuadas que las formas
riginales (1.18) y (1 .19) .
Delta de Kronecker. L a de l ta de Kronecker se def ine por
Por la introducción de este símbolo y el empleo de l a convención de suma, las relaciones de o r t ono rma l i dad (1.13) y (1.14) se s intet i zan en esta única ecuación.
liklSk = ht, (1.28)
Por ejemplo, si se toma i = 1 y / = 2, ésta será
hi k* = 0; esto es,
**U 2̂1 + 'l2 '22 + 'lS 2̂3 = 0,
la cua l es (1.13),. Nuevamente , si se t oma 1 = ;' = 1 en (1 .28) ,
d a < V « l ; esto es
C, + 4 + 4 = 1.
l a cua l es (1.14),. De i gua l manera , si se t oman las otras combinac iones posibles de los índices i y j se obt i enen las cuat ro condic iones d e orto-n o r m a l i d a d restantes.
L a forma a l t e rnat i va de las condic iones de o r t ono rma l i dad expresada por (1.15) y (1.16) se resume en la ecuación
(1.29)

28 Coordenadas cartesianas rectangulares y rotación de ejes
L a de l ta de Kronecke r es un símbolo útil en muchos contextos excepto en e l análisis vector ia l .
Otras observaciones sobre la convención de suma
a) U n índice repet ido se conoce como índice mudo, po rque se puede subst i tu i r po r cua lqu i e r otro símbolo adecuado. P o r ejemplo,
ya que se sobreentiende que la suma se hace con los índices repetidos en cada expresión.
b) C u a n d o se emplea l a convención de suma, se debe evitar e l empleo de u n índice más de dos veces en l a m isma expresión (por ejemp lo , e l s igni f icado de li} ljf no es c l a r o ) .
c) E n lo que abarca e l estudio de este l i b r o hay solamente tres valores posibles para u n índice., que son prop iamente 1, 2 y 3. S i n embargo, e l lector apreciará si e l incremento o disminución de l rango de u n índice puede ser útil en otras ocasiones.
A l gunas partes de l análisis vector ia l se pueden abrev iar considerablemente por el empleo de la convención. Por lo general, se advertirá al lector cuando se emplee ésta.
EJERCIC IOS
25. Si
demostrar que = 8, = - 5 , .. = - 6 .
demostrar que
[Sugerencia. Para la última parte, evaluar primero ajx b., o,a b. y a. b..]
27. Demostrar que

Invariancia con respecto a una rotación de los ejes 29
Ifll. El índice i puede tomar todos los valores enteros desde 0 a oo. Si los números É|, l>i y c{ se definen por
a. = xi, b. = l-, e. = ( - l ) i .
Ollde x es una constante y (por definición) 0! = 1, demostrar que
1 a. 6. = e», a{ c. =
1 +x
. Si las cantidades et. y e't. satisfacen a la relación
strar que
lmi lnj eij — ^mn'
t) rm n) mn
encia. Multiplique la primera ecuación por tmpl„q-]
.7 Invariancia con respecto a una rotación de los ejes
Cons idere u n a función / (a,, a¿, ...) de varios elementos a , , a 2 , ls que dado cua lqu i e r sistema de ejes cartesianos rectangulares Oxyz, elementos a „ cu, . . . , se de t e rminan por u n a regla de f in ida . I nd i que
r a ' 1 ( a ' 2 , . . . los elementos correspondientes a cua lqu i e r o t ro sistema ejes cartesianos rectangulares Ox'y'z', con e l m ismo or igen O. E n
tices, si
/ (a\, a ' 2 , ...) = / ( « i » a.2, . . . ) ,
ncióh / se d ice que es invariante con respecto a una rotación de s ejes.
Los ejemplos siguientes ac laran la idea de invar ianc ia .
femplos de invariantes
1. L a función \/(x-' + V" + z*) e s invar iante , puesto que (1.9) d a
\x*+y-+z*) = +/,, + /?;,) **+(&+
+ ( 4 + & + 4 ) z ' 2 + 2 ( í „ Í 2 1 + Z I 2 7 2 2 + J 1 3 4 i ) x'y'
+2(l,,L,l + lT2 h.¿+kJr,)fz'
+2(/„ «uH-tí 4 * U * ¿ Í ^ >
emplear las condic iones de o r t ononna l i dad (1.13) y ( l . H ) , esto se uce a

30 Coordenada* cartesiana* rectangulares y rotación de ejes
V i * * + y2 +z2) = V ( * ' 2 + y'2 +z'2)-
Este resultado t iene u n a interpretación geométrica i nmed ia t a : expresa e\ hecho de que l a d is tanc ia entre e l or igen y u n p u n t o no depende d e l sistema de coordenadas que se emplee para ca l cu lar la .
L a demostración dada con ante r i o r idad se abrev ia considerablemente por el empleo de l a convención de suma (ver el ejercicio 32 a l f i na l de esta sección).
2. Si O A y OB son dos rectas que pasan por el or igen, l a expresión que representa el coseno de l ángulo entre ellas es inva r i an te con respecto a u n a rotación de los ejes. P a r a ver i f icar esto algebraicamente, sean (a„ a2, a3), (blt b2, b3) las coordenadas de A y B respecto a los ejes Oxyz. S i O A = c y OB = b, los cosenos directores de O A y OB son
ai a2 fls &i b2 b3
a' a' a ^ b' b' b
Si 0 es el ángulo entre O A y OB, l a fórmula (1.9) d a
a, bx + a2b2 + a3 b3 a t o t
con el empleo de la convención de suma. Según el e jemplo (1) se ve que a y b son invar iantes con respecto a u n a rotación de los ejes. P o r tanto, para demostrar que eos 0 es invar ian te basta demostrar que a* b{
es invar iante .
A l emplear (1.25) se ve que en l a transformación a los ejes nuevos Ox'y'zf, las coordenadas de A y B se convier ten en (a ' „ a'2, a'3) y (b\, b\, b'3), donde
a\ = lyHj, b\ = lik bk.
Por tanto a\b\= l^l^ajb,. (1.30)
(Nótese que antes de establecer la expresión para a\ b'^, se deben emplear diferentes índices mudos en la fórmula para a\ y b\; de otro modo un índice aparecerá más de dos veces en el segundo m i embro de (1.30).) A l emplear las relaciones de o r t ono rma l i dad en l a forma (129) (con los índices cambiados por los que se requieren aquí) y (1.30) se convierte en
a\ b\ = hjk a¡ bk
= a k b k - a t <V
se deduce (pie la cant idad a< ¿>4 = (a, bt + a2b2 + a3 b3) es invar iante

Notación de matrices 31
irt|K-<to a una rotación de los ejes, como se requiere, y que eos 9 es i n -v.iM.nite también.
/ / concepto de invariancia con respecto a rotación de los ejes es im-f»,liante porque los aspectos identificables de un sistema físico son por lo ycneral invariantes en este sistema.
Por e jemplo , l a d istancia entre dos puntos , e l v o lumen de u n a región Mpecífica, y l a componente de u n a fuerza a l o largo de u n a recta dada •mi todas independientes de cua lqu i e r sistema especial de coordenadas, y las expresiones que las representan son invar iantes con respecto a u n a rotación de los ejes.
EJERCICIOS
31. Hallar las coordenadas x\ y' y z' de los puntos x = 1, y = l , z = 0 y x = 0, fm I, z = 1 para la rotación de los ejes dados en el ejercicio 21, es decir
x' = x eos 0 + y sen 0, y' = —x sen 0 + y eos 0, z' = z.
Verificar que el ángulo entre las rectas que unen el origen con estos dos puntos re--ulia como de 60° con cualquier sistema de ejes.
32. Demostrar que la cantidad x* + x* + x* = xi xt es invariante respecto a una mlación de ejes.
1.8 Notación d e matrices
O t r a manera de expresar a lgunos de los resultados obtenidos en este Capítulo es s impl i f i car los con el empleo de matrices; s in embargo, no es nuestra intención ut i l i zar las m u c h o en este l i b ro , pero aquel los lecto-res que estén famil iar izados con matrices pueden recur r i r a las siguientes notas breves.
L a mat r i z de los cosenos directores en (1.12) se puede ind i ca r por
su transpuesta es
(1.32)
C o n esta notación, las condic iones de o r t ono rma l i dad (1.13) y ( l . H ) se pueden expresar como

32 Coordenadas cartesianas rectangulares y rotación de ejes
LLT = J, (1.33) donde
/ 1 0 0 \ (1.34) . ( : : : )
\ o 0 1 /
es l a mat r i z un i t a r i a . P o r l a premultiplicación de (1.33) p o r L - 1 , que es l a inversa de L se obt iene po r resultado
LT = I.—1. (1.35)
S i se escribe
x = Y *'= ^*Cj (1-36)
las reglas de transformación (1.25) y (1-26) se pueden expresar como
x' = Lx (1.37)
y x = LT
X' (1.38)
respectivamente. L a expresión (1.38) se deduce u n a vez más de (1.37) por l a premultiplicación por L _ 1 y e l empleo de (1 .35).

C A P I T U L O
ilgebra escalar y vectorial
8.1 Escalares
Se l l a m a escalar cua lqu i e r can t idad matemática o prop iedad de u n •ÍNiema físico que se pueda representar po r u n número rea l . E n e l caso de una p rop i edad física, el número real será u n a med ida de ésta, en Ciertas unidades (por ejemplo, k i logramos, metros y segundos) .
Ejemplos part iculares de estos escalares son: a) el módulo de u n número comple jo , b) la masa, c) e l v o lumen y d) la temperatura. Notar que los números reales son escalares.
Para ind i ca r números reales que representan escalares se emplearán letras impresas en t i po itálico o curs ivo (como a, b, c, etc. ) . P o r conveniencia, enunciados tales como: "Sea a u n número real que representa un escalar" se abrev ia en la forma, "sea a u n escalar" .
Igualdad de escalares. Se d ice que dos escalares (medidos en las mismas unidades si son propiedades físicas) son iguales si los números reales que los representan son iguales.
En todo este libro se supondrá que en el caso de cantidades físicas se emplean las mismas unidades en ambos miembros del signo de igualdad.
Adición, substracción, multiplicación y división escalares. L a suma He dos escalares se def ine como l a suma de los números reales que los icpresentan; y de igual manera, la substracción, multiplicación y división escalares se de f inen por las operaciones correspondientes en sus números m presentativos. E n el caso de escalares físicos, las operaciones de a d i -< ion y substracción solamente t i enen s igni f icado físico para escalares similares, tales c o m o dos long i tudes o dos masas.
Es necesario tener precaución con las unidades. P o r e jemplo si a y b son dos escalares físicos, dec i r que su suma es a + b, solamente tiene sentido si las unidades de med ida son las mismas.
Por o t ra parte, considérese l a ecuación T = $mv2 q u e d a l a energía cinética T de u n a partícula de masa m que se mueve con u n a ve loc i -
33

34 Álgebra escalar y vectorial
dad v. Si T vale 30 kg m2/seg2 y v vale 0.1 km/seg, entonces, para calcular m = 2T/v2 primero se deben introducir unidades compatibles de longitud y tiempo. Por tanto, convirtiendo la velocidad a m/seg, se encuentra que v tiene el valor de 100 m/seg y, por tanto, el valor de m será 2 X 30/10 000 = 0.006 kg.
En lo sucesivo debe entenderse que hay que emplear unidades compatibles en las operaciones en que intervienen propiedades físicas.
*
2.2 Vectores: nociones básicas
Desde un punto de vista elemental, el lector probablemente ha encontrado propiedades de sistemas físicos que requieren una magnitud escalar y una dirección para definirlas completamente, por ejemplo, la velocidad de un punto en movimiento y la fuerza ejercida sobre un cuerpo. Tales propiedades se llaman vectores. Más adelante se definirá formalmente un vector, pero como podría parecer que la definición está fuera de lugar, se dejará así por el momento, para continuar sobre una base intuitiva.
Considere la velocidad de un punto P que se mueve con respecto a I los ejes coordenados cartesianos rectangulares fijos Oxyz. Si vlt v2 y v;, j representan la rapidez con que P se mueve alejándose de los planos yz, zx y xy en las direcciones de los ejes x, y y z respectivamente, entonces vu v2 y vs s e llaman componentes de su velocidad; en conjunto, describen completamente el movimiento instantáneo de P.
Si los ejes Oxyz se mueven a nuevas posiciones fijas O 'x 'yV sin rotación, las componentes de la velocidad de P con respecto a los ejes nuevos serán vv v2 y v3 como antes; pues v, es la rapidez con que P se mueve alejándose del plano yz y tal rapidez es igual a aquella con la que se aleja del plano y* zf, puesto que los dos planos son paralelos; y similarmente para las otras dos direcciones.
Si los ejes con respecto a O se hacen girar a nuevas posiciones Ox'y'zf, las componentes de la velocidad, digamos v\, i/2 y t/3 de P con respecto a los ejes nuevos deben estar relacionadas de alguna manera con las componentes originales, ya que los dos conjuntos de componentes son suficientes para definir el movimiento de P. La relación dependerá de la posición relativa de los dos sistemas de ejes (que está definida por los cosenos directores de un sistema con respecto al otro), y se podría haber obtenido explícitamente continuando la explicación sobre una base intuitiva.
L a siguiente definición formal corresponde al modelo sugerido anteriormente por las breves observaciones dadas. Posteriormente en esta misma sección y como consecuencia de la definición se indica que los

Vectores: nociones básicas 35
es t i enen m a g n i t u d y dirección asociadas y así se confirmará la p a t i b i l i d a d de l o anter io r con las ideas in tu i t i vas .
INICIÓN. U n vector es u n a cant idad matemática o física tal que : cuando se asocia con u n sistema de ejes cartesianos rectangulares
z puede representarse completamente por tres escalares av a2 y a3
'onados a su vez con los ejes x, y y z; la t r iada de escalares en (a) es invar iante con respecto a u n a
ación de los ejes; es decir , si Oxyz y O'x'y'z' son ejes cartesianos ngulares (con orígenes diferentes O y O') ta l que Ox es para le lo ', Oy para le lo a O'y' y Oz para le lo a O'z' y si (a,, a.¿, a 3) y (a\,
'3) son las tríadas asociadas con los dos sistemas de coordenadas
Livamente, entonces al = a\, a2 = a'2 y a3 = a'3; si (alt a2, a3) y (a\, a'2, a'3) son las tríadas de escalares asociadas
'os dos sistemas de ejes Oxyz y O'x'y'z' respectivamente (con el mis-erigen O) , y si los cosenos directores de Ox', Oy' y Oz' con respecto ejes Oxyz están dados por la matr iz de transformación (1.12), en
ees,
fl'i = ki «i + 'i2 a2 + /13 a3, a'2 = l21 a , + l22 a., + l23 a 3 ,
o-'* = ¿si a\ + hi a2 + l33 a3.
(2.1)
in t roduce la convención de suma, las ecuaciones (2.1) se reducen a
a'^l^a, ( ¿ = 1 , 2 , 3 ) . (2.2)
^os vectores se representarán con letras en t ipo negro. Po r tanto,
a = (au a2, a3) ; (2.3)
L a2, a3 se l l a m a n respectivamente componente x, componente y y iponente z de l vector a.
Para evitar repetición, en lo sucesivo, las componentes de todos los tores serán referidas a los ejes Oxyz a menos que se indique otra cosa.
Igualdad de vectores. Dos vectores a = (a¡, a2, a3) y b = (blt b2, b3) feridos a l m i smo sistema de coordenadas, se de f inen como iguales si sólo si sus respectivas componentes son iguales, es decir ,
a = b o ar = <b,, a2 = b2, a3 = b3. (2.4)
Vector cero. E l vector cuyas componentes son todas iguales a cero se ama vector cero o vector nu lo , y se representa por :
0 = (0, 0, 0 ) . (2.5)

'M> Álgebra escalar y vectorial
Vector de posición. S i A y B son dos puntos con coordenadas (au a2, "A) y (óu b2, b3), l a recta que v a de A hac ia i? es u n vector que se representa por
—>
AB = (bl — au b2 — a2, b3 — a3)
y recibe e l nombre de vector de posición de B con respecto a A. —>
Demostración. Para demostrar que AB es u n vector hay que satisfacer las condic iones (a), (b) y (c) de la definición de vector.
a) T o m a n d o los ejes cartesianos rectangulares Ax'y'z? paralelos a los ejes Oxyz, como se i nd i ca en la F i g . 9, se ve que las coordenadas de B en Ax'y'z' f i jan completamente la posición de B con respecto a A. C o m o estas coordenadas son:
x' = ¿», — flj, y' = b2 — a2, z! = b3 — a3,
las cantidades 6j — a l f b2 — a2 y b3 — a3 pueden asociarse a su vez con los
ejes x', y y z' y, po r tanto, con los ejes x , y y z; tales cantidades se l l a
m a n componentes de AB. b) Cons idere que los ejes Oxyz se mueven parale lamente a sí mis
mos, de manera que pasen por u n nuevo or igen cuyas coordenadas son (—x0, —yo, —Zo) i referidas a los ejes en su posición o r i g ina l . Las coordenadas de A serán
FK;. 9.

Vectores: nociones básicas 37
iNo ~r ai» + a2, z« + fl3) y las d e B, (x0 + bu y0 + b2, z0 + b3). Po r con-
—> siguiente si la c o m i l l a i nd i ca e l va lor de AB en los ejes nuevos,
(All)' = [(x 0 + b,) - (x 0 + a,), (y 0 + 62) - (y„ + a 2 ) , (z0 + b3) - (z„ + a 3)]
= (6, — alf b2 — a2, b3 — a3)
—> = AB.
M' deduce que las componentes de AB son invar iantes con respecto a u n a li.islación de ejes.
c) Sean Ox', Oy' y Ozf los ejes coordenados rectangulares cuyos cosenos .!iK< lores relat ivos a los ejes Oxyz están dados po r (1.12). E m p l e a n d o (1.23), las coordenadas (a\, a\, a'3) y (b\, b'2, b'3) de A y B referidas .i los ejes Ox'y'z' son
a\ = .2 kgfy b\ = ¿ lu bs (i = 1,2. 3),
resultando
b\ - a\ = .2 l^b, - a,) (i = 1,2, 3). (2.6)
—>
l)( lo anter ior se deduce que las componentes de AB obedecen a l a ley
de transformación vector ia l (2.2). C o m o se satisfacen las tres condic io
nes de l a definición, AB es u n vector. —>
E l vector OP que da la posición de u n p u n t o P (x , y, z) con respecto .i un or igen O, se l l a m a vector de posición de P. Más adelante será conveniente representar este vector po r r = (x, y, z ) .
Observe que e l vector de posición de u n p u n t o O c on respecto a sí mismo, es e l vector cero (0, 0, 0 ) .
Ejemplos de vectores que aparecen en sistemas físicos. M u c h a s propiedades de sistemas físicos son vectores. P o r ejemplo, velocidades y aceleraciones de puntos móviles, fuerzas, velocidades y aceleraciones angulares y pares, son todos vectores. E n la teoría de la e lectr ic idad y el magnetismo, l a in tens idad de campo eléctrico, l a in tens idad de campo magnético y la dens idad de corr iente eléctrica son también vectores.
E n el s iguiente capítulo (sección 3.7) se definirán los vectores veloc idad y aceleración. Ocas iona lmente se hará referencia también a a lgunos de los otros vectores menc ionados antes; sus def in ic iones se pueden ha l lar en l ibros de consul ta apropiados.
Representación geométrica de vectores. Considérese que a = {alta2, a3)

3 8 Àlgebra escalar y vectorial
es u n vector no cero y A e l pun to cuyas coordenadas x, y y z son av a2
—> —> y a a . Entonces O A = ( a „ a 2 , a 3) l o que demuestra que a y O A t ienen las mismas componentes. Po r consiguiente, el segmento de recta dirigido O A se puede considerar como u n a representación geométrica de a. C u a n d o u n segmento d i r i g i d o tal como OA representa u n vector, l o anter ior puede mostrarse en u n d iagrama trazando u n a flecha desde O hasta A (Fig. 10 ) . U n vector cero se representa geométricamente en forma aprop iada por u n punto .
Sea O'A' un segmento de recta de l ong i tud i gua l a la de O A trazado parale lamente y en el mismo sentido que O A. Si O'x', O'y' y O'z' son ejes desde O' paralelos a Ox, Oy y Oz, respectivamente, las coordenadas de A' referidas a estos ejes nuevos serán (au a2, a3). E n consecuencia
O'A' es u n a segunda representación geométrica de l vector a. D e aquí se deduce que la representación geométrica de a como segmento de recta d i r i g i d a no es única; cua lqu i e r otro segmento de recta d i r i g i do O'A' parale lo y de l mismo sent ido que OA y con su misma l ong i tud puede emplearse también para representar a a.
Dirección de un vector. Puesto que u n vector no cero se puede re-
Fic. 10. O'A' = OA.

Vectores: nociones básicas 39
tar po r u n segmento de recta d i r i g ido , se d ice que u n vector (o está asociado a) u n a dirección: na tura lmente tal dirección será
1 a la de los segmentos d i r i g idos que representan el vector. P o r to, la dirección d e l vector a es l a dirección de l a recta en l a que uta O A. L a dirección d e l vector n u l o no está de f in ida .
B e d i ce que dos vectores son paralelos si t ienen la misma dirección ant¡paralelos si t i enen direcciones opuestas.
Magnitud de un vector. L a magnitud de u n vector a = (a„ a2, a3) se : n e como
a = y/{a\ + a\ + a\). (2.7)
ambién será conveniente en a lgunas ocasiones representar l a m a g n i t u d
u n vector a p o r |a¡. — »
Si a se representa geométricamente por O A = (alr a2, a3), se ve que a precisamente l a l ong i tud de l segmento de recta OA. Puesto que esta
'tud es inva r i an te en u n a rotación de ejes (ver sección 1.7, ejem-1), se deduce q u e l a m a g n i t u d de u n vector también es invar iante ,
m a g n i t u d de u n vector se l l a m a también a veces su módulo o su ta.
Vectores unitarios (o unidad). U n vector c o n m a g n i t u d i gua l a l a idad se l l a m a vector unitario. L o s vectores uni tar ios se d i s t inguen
entemente con u n acento c i rcunf le jo ; así r = (eos 0, sen 6, 0) es vector un i t a r i o .
S i a es u n vector cua lqu ie ra , el vector u n i t a r i o cuya dirección es la a se representa por a .
EJERCIOOS
1. Demostrar que las ecuaciones (2-2) son equivalentes a
enría. Multiplique (2.2) por l¡k y emplee las condiciones de ortonormalidad •29).]
2. Los puntos P y Q_ tienen las coordenadas (1, 2, 3) y (0, 0, 1) con respecto a ejes Oxyz. Hallar las componentes referidas a tales ejes de: a) el vector de po-
-¡ón de P con respecto a O; b) el vector de posición de O con respecto a P; el vector de posición de P con respecto a Q_. n
3. Hallar las magnitudes de los vectores a = (L 3, 4) y b = (2, — I, 0).
4. Demostrar que los vectores a = (0, —3, 3) y b = (0, —5, 5) tienen la misma rección. ¿Cuál es la razón a/b?

'10 Álgebra escalar y vectorial
'>. 1.a matriz de transformación para una rotación de los ejes Oxyz a los ejes Ox'y'i' es como sigue:
O X y z
X* 0 i 0 y - 1 0 0 z' 0 0 1
Explicar (con palabras o por un diagrama) cómo están relacionadas las posiciones de los dos sistemas de ejes.
Un vector a tiene componentes (2, 1, 2) con respecto al sistema de ejes Oxyz. Hallar las componentes de a con respecto a los ejes Ox'y'z'.
6. Demostrar que a = (eos 6. sen 6 eos tp, sen 6 sen <p) es un vector unitario.
7. Hallar dos vectores unitarios que sean perpendiculares a cada uno de los vectores a = (0, 0, 1) y b = (0, 1, 1). ¿Hay más vectores unitarios que sean perpendiculares a a y b?
2.3 Multiplicación de un vector por un escalar
-Si las componentes de u n vector a, según u n sistema de coordenadas
cartesianas rectangulares, se m u l t i p l i c a n cada u n a por u n escalar X, las
tríadas ordenadas de escalares que se fo rman de ese modo se de f inen
como las componentes de Xa (o de aX). Po r tanto, si a = (fl,, a2, a3)
cuando está refer ido a los ejes Oxyz,
Xa = aX = (Xfl„ Xfl2, Xfl3). (2.8)
y
x
Fio. 11. E l caso para X < 0.

Multiplicación de un vector por un escalar 41
Es fácil ver que Xa es u n vector, ya que en p r ime r lugar , se satisface Obviamente la condición (a) de la definición que se da en l a sección 2.2 y también de l m i smo modo la condición (¿;), ya que la tríada (a,, a.,, a 3)
invar ian te en u n a traslación de ejes. Además, refiriéndose a los ejes •x ' yV (como se de f ine en la sección 2.2),
a = (a ' „ a'.¿, a'3),
por tanto, las componentes de Xa relacionadas con estos ejes son (Xa'„ i'.,, ).a'-.). Para satisfacer (c) se requiere que
X a ' ^ / ^ X a , ) , (i=\, 2. 3)
y como éstas son ¡guales a las ecuaciones (2.2) mu l t i p l i cadas por X, se llega a l resultado. Observe que cuando X = 0, Xa es e l vector n u l o def i n ido por l a ecuación (2.5).
Por la ecuación (2.8) y l a definición de l a m a g n i t u d de u n vector
|Xs| = >/ (X2 a , + X 2 a'i + X2 al)
= |X| V ( « ? + «\ + al)
- N *
*or tanto, cuando se m u l t i p l i c a u n vector po r u n escalar X, su m a g n i t u d preda m u l t i p l i c a d a por |X|.
L a multiplicación de u n vector no cero p o r u n escalar posi t ivo no unb i a su dirección, pero si se m u l t i p l i c a por u n escalar negativo d i c h a
lirección se invierte . Para ver esto, considere que O A = (a,, a 2 , a 3) re-
>resenta a a, entonces Xa estará representada por XOA = (Xa,, Xa 2 , Xa 3) =
M ' . Puesto que A y A' t ienen las coordenadas (a „ a 2 , a3) y (Xa,, Xa 2 , Xa.,) spectivamente, los cosenos directores de O A y OA' serán
a , a2 a3 Xa, Xa 2 Xa 3
a' ~a' T Y ¡Xj^' |i|a ?
donde a = \/(a, + al + a*). Si X > 0 entonces X/|X| = 1, mientras que si X < 0, entonces X/|X¡ = — 1. P o r consiguiente, OA y O A' t ienen la
l isma dirección sí X > 0 y direcciones opuestas si X < 0 (F ig . 11) . L a dirección de Xa es, por tanto, igual o contrar ia a la de a según que X sea posi t ivo o negativo.
El vector — a . Se def ine como
- a = ( - l ) a . (2.9)

42 Álgebra escalar y vectorial
Fie. 12. Segmentos OA y OA' de una recta dirigidos opuestamente y que tienen igual longitud.
Si a y —a se representan por O A y OA' respectivamente, .entonces OA y OA' serán segmentos de i gua l l o n g i t u d d i r i g idos opuestamente.
Observe que O A = —AO, puesto que AO y O A' s iendo segmentos paralelos d i r i g idos y de i gua l l ong i tud , representan el m i smo vector.
EJERCIC IOS
8. Un punto P sobre una recta AJi es tal que \AP\ : |PB| = 3:2. Demostrar que
2AP = ±3P8.
9. Demostrar que, para cualquier vector a.
a = a&,
donde i es un vector unitario en la misma dirección que a-10. Demostrar que los cuatro puntos cuyos vectores de posición son
&' «V - r r - - « V 1 2
donde r' ^ 0, r„ ^ 0, están sobre una circunferencia.
2.4 Adición y substracción de vectores
Adición. L a suma de dos vectores a = (fl,, a2, a,) y b = (¿>„ b¡, bt) se def ine como
a + b = (a, + bx, a2 + b2, a3 + b3). (2.10)
E l con junto de todos los vectores es cerrado con respecto a la operación de adición; es decir , la suma de dos vectores a y b es u n vector. E n efecto, si se consideran los requisitos (a), [b) y (c) de la definición de vector (sección 2.2), se ve inmediatamente que (a) y (b) se satisfacen. As imismo , si (a ' „ a'2, a'3) y (&',, b'2, b'3) son las componentes de a y b referidas a los ejes Ox'y'z', las ecuaciones (2.2) d an

Adición y substracción de vectores l.'í
a\=lijaj y b'^l^bi ( í = 1 , 2 , 3 ) .
ni .mdo se tiene,
«Iuc demuestra que las componentes de a 4- b satisfacen la condi -ón (c) ( l omo
at + b i = b i + ai (i = 1, 2, 3 ) ,
deduce de (2.10) que
a + b = b + a; (2.11)
decir, l a operación de adición es conmutativa. As im ismo , si c = (c,, c2, c3) es u n tercer vector, entonces como
tiene
(<ii + bt) + C i = ai+ (&i + c<) (i = 1, 2, 3)
(a + b) + c = a + (b + c) ; (2.12)
sea, l a operación de adición es asociativa. Es impor tan te saber que reglas como las leyes conmuta t i va y aso-
'a t iva de la adición no son análogas a las leyes similares, ut i l izadas ra los números reales. Se establece u n sistema matemático nuevo que
ontiene cantidades que no son números reales; y no hay razón para onsiderar, que se obedece a dichas leyes hasta que esto haya s ido de-ostrado.
Ley del triángulo para la adición. D e la definición de suma de vec-ores, se puede deduc i r la ley de l triángulo para la adición (que se l l a m a
veces ley de l parale logramo) como sigue:
S i dos vectores se representan geométricamente por AB y BC, enton-— »
es su suma se representa por AC (Fig. 13). Po r consiguiente
AB + BC = AC.
A menudo AC se l l ama resultante de AB y BC. Demostración. T r a c e los ejes Axyz desde el punto A, y la recta AD
p i r a comple tar el para le logramo ABCD (Fig. 14). Cons idere que (bu
a» bs) y (¿i, d2, d3) son las coordenadas de B y D, respectivamente. Entonces como BC es para le lo a AD, las coordenadas de C serán (¿>, + dx,

Ki<;. 14. Si ABCD es un para le lógrame. AB + AD = AC (Ley riel paralelogramo).
b2 + d.¿, b3 + d:í). Y po r tanto, cons iderando los ejes Axyz,
Ali = (bv b,, b,),
¡iC = Al) = ( d „ d.,, d.) , —>
AC = (¿>, + d „ b2 + d2, 6 3 + da).
se deduce inmed ia tamente por la ley de la adición de vectores que, de acuerdo con lo requer ido,
Ali + BC = AC.
Substracción. L a diferencia de dos vectores a y b se de f ine como
a - b = a + ( -b ) . (2.13)
Observe que para u n vector a,

Adición y substracción de vectores 45
a - a = O.
Flg. 15 muestra cómo la suma y la diferencia de los vectores a y b
pueden representar geométricamente.
~b b
Fie. 15. Suma y diferencia de los vectores a y b.
i.MH" 1. Los vectores de posición de tres puntos. A, B y P, con respecto a un O, son tales que
ÜP = \OA + IKOB
Je X y u. son números reales no cero. Demostrar que P está en AB (posiblemente prolongación) y que AP:PB = : |X| (Fig. Ifi) .
0
Fie. 16.
'ución. Por la ley del triángulo,
ÓA = OP + PA
ÓB = ÓP + PB.
ra satisfacer la relación dada entre OP. OA y Olí se requiere

46 Álgebra escalar y vectorial
_ \{OP + PA) + u (OP + PB)
X + p,
de ahí que
O = \PA + iKPfí,
—» —>
como — PA = AP lo anterior puede expresarse por
AP = ^-PB (X, U 7 t 0 ) . (2.14)
Igualando las magnitudes de cada miembro de (2.14) se tiene AP = |p/X| PB. Por tanto
AP.PB = | u¡ : |X|.
Si X y u tienen el mismo signo, (2.14) indica que AP y PB tienen la misma dirección, en consecuencia P está en AB y entre A y B. Si X y u tienen signas contra-
—» —>
rios, AP y .¿/J serán opuestos; por consiguiente P está en la prolongación de AB trazada desde B (si |p|/|X| > 1) o bien, en la prolongación trazada desde A (si ¡u|/|X| < 1).
EJERCICIOS
11. Si a y b son dos vectores como se muestra a continuación, verificar que sus sumas y diferencias son como se indican
a b a + b a — b
(a) (2, 2. 2) ( 1. 0. 1) (3, 2, 3) ( 1, 2, 1) (/>) (3, 0, 0) ( 5. 0, 0) (8, 0, 0) (-2, 0, 0) (r) (1, - 2 . 6) (-1, - 3 , 7) (0, - 5 , 13) ( 2, 1, -1).
12- I.os puntos A y B con respecto a los ejes Oxyz son tales que:
• ¿ = ( 1 , 1 , 1 ) , Mi = (0, - 1 , 3).
¿Cuál es el vector de posición de: a) B con respecto a O; b) O con respecto a B'í
13. Sobre un plano horizontal (sin obstáculos) , un observador camina una milla hacia el N. una hacia el E, una hacia el S y una hacia el W. Explicar vectorial-mente por qué regresa al punto de partida.
14. Si el ángulo entre los vectores a y b es de 00°, y si a = b = 3, demostrar que
|a - b| = 3.
15. Por la propiedad de que AC<^AB + BC de un triángulo ABC, demostrar que
|a + b| + b.
¿Para qué casos particulares es cierto que

Productos escalares 47
Demuestre que |a + b| =a + b?
la - bi < a + b.
.?. Si ü y v son vectores unitarios con direcciones diferentes, demostrar que el Ctor ü + v biseca internamente el ángulo entre ú y y. ¿Es ¿ (ú + v) un vector Itario?
.5 Los vectores unitarios i , j , k
Si i, j y k son los vectores unitarios en las direcciones de los ejes
y y z, respectivamente, entonces
i = ( 1 , 0 , 0 ) , j = (0, 1 , 0 ) , k = (0, 0, 1 ) .
>leando las reglas de la multiplicación de u n vector por u n escalar
la adición de vectores, u n vector a = ( a„ a2, a3) se puede escribir
>mo a = a, i + a2 j + « 3 k.
fácil demostrar que, cuando se da la tríada i, j , k, la representación
a es única.
Lo s tres vectores i, j , k son unitarios y perpendiculares entre sí. U n sis
tema de tres vectores unitarios mutuamente perpendiculares se l l ama
sistema ortonormal. Deb ido a que u n vector arb i trar io puede represen
tarse como una combinación l ineal tle i, j , k, se dice también que estos
vectores forman una base ortonormal para la total idad de los vectores.
Las bases ortonormales desempeñan u n papel m u y importante en el
íálisis vectorial.
EJERCICIOS
18. Un vector a en el cuadrante positivo del plano xy forma un ángulo de 45° >n cada uno de los dos ejes Ox y Oy. Demostrar que
a = (i + j)/V*-
lx)s vectores de posición de los puntos A y B con respecto al origen O de los Oxyz son ¡ — j + 2k y 5¡ + j + Gk respectivamente. Demostrar que AB = 6.
20. Hallar a, b y c si
(a + b - 2) i + (c - 1) j + (a + c) k = 0.
2.6 Productos escalares
I E1 producto escalar (o producto punto) de dos vectores a = (au a2, a3) y b = (&!, b2, b3), se define como

4tt Álgebra escalar y vectorial
a b = a1bl + a2 b3 + a3 b3. (2.13)
Esta operación entre dos vectores es conmutat i va , po rque
b . a = b1al + b2a2 + b3a3
= a b . (2.16)
E l p roduc to escalar de a por sí m i smo es
a-a = a2 + al + al = a ;
P o r consiguiente a -a es el cuadrado de la magn i tud de a. Si a = (a„ a2, a3), b = (&„ b.¿, b3) y c = ( c „ c 2 , c 3 ) , entonces
ésta es la ley distributiva. Se demuestra fácilmente, puesto que
a - (b -t- c) = ( a „ a2, a3) • (6, + cu b2 + c2, b3 + c3) = ( « i &i + a i c, + a 2 b2 + a2c2 + a3 b3 + a3 c3) = (a, 6, + a2b2 + a3 b3) + (a, c, + « 2 c 2 4- a3 c3) = a-h + a-c.
Invariantes escalares. T o d o escalar que toma el m i s m o va lor en cada sistema de coordenadas con el cua l puede ser asociado se l l ama invariante escalar. P o r tanto las componentes de u n vector a = (a,, a2, a3) no son invar iantes escalares porque pueden tomar diferentes valores en dist intos sistemas de coordenadas. S in embargo, la m a g n i t u d de a, es dec i r a = V ( f l i + fl* + ' a u n invar ian te escalar.
C o m o a-a = a2, e l p roduc to escalar de a por sí m i smo es un invar iante escalar. Éste es u n caso especial de l s iguiente resultado más genera l .
Los productos escalares son invariantes escalares. Para demostrar esto, sean ( « ' „ a'2, a'3) y (&'„ b'2, b'3) las componentes de a y b c on resj>ecto a los ejes Ox'y'z'. P o r la ecuación (2.2),
a-(b + c) = a-b + a*c; (2.17)
a\= lija¡ y b'^l^b, ( « = 1, 2, 3 ) ,
y asi hi hk a> bk.
Pero, por las condic iones de o r t ono rma l i dad (1.29),
i)e ahí que M\b't = Òikaibk
m ak bk;

Productos escalares 49
•lee Ir, <i\ b\ -f af2 b'2 + a'3 b'3 = a^b1 + a2 b2 + a3 b3. Esto demuestra Due el producto escalar de a y b es invar iante en u n a rotación de ejes. Puesto que el producto escalar es también obv iamente invar ian te en u n a traslación de ejes (pues las componentes de a y b son invar iantes en i.i l traslación) se deduce que tal producto es u n invar ian te escalar.
Representación geométrica. Representar los dos vectores no cero
ii s (au a2, a3) y b = (¿>„ b2, b3) po r OA y OB, y sean a „ Oa, a 3 y p\, | i , y p 3 los cosenos directores con respecto a los ejes Oxyz de los segmentos de recta d i r i g idos OA y OB, respectivamente. Entonces, puesto • pie las coordenadas de A y B son (a,, a2, a3) y ( 6 „ b2, b3), se tiene I-oí las ecuaciones (1.4)
ai bi 0.« = - , & = - - ( t = l , 2 , 3 ) .
a b
Así, empleando la convención de suma,
aba¡ p\ = tti bL.
Pero si 0 es el ángulo entre OA y OB (Fig. 17 ) , l a ecuación (1.9) demuestra que
eos $ = a¡ pV
1
Fie. 17.
De ahí que a - b = ab eos 0. (2.18)
Ésta es u n a relación importante , empleada a m e n u d o como definición ile producto escalar.
Observar que en vista de que eos (2jt — 9) = eos 9, no hay ambigüedad a lguna si 2jt — 9 se toma como el ángulo entre O A y OB.
Dos vectores no cero a y b son perpendiculares si y sólo si a-b = 0. Porque si a y b son perpendiculares, 9 = '/¿JÍ (ó 3/2n), y así por la ecua-( i on (2.18) a-b = 0. As imismo , si a-b = 0 y a ^ O y b^O, entonces eos 9 = 0; de ahí que 9 = ' 1 / 2 n (ó 3/ 2w), l o que demuestra que a y b son perpendiculares.

><S0 4 ¡Álgebra «sáfalo» y vectorial
Producios escalares de pares \W ¡ j , jU k i Los vectores uni tar ios i , j , k, in t roduc idos en l a sección anter ior , s on tales | ¡que. >el i producto.-.eadalar de uno cua lqu ie ra por sí m ismo es igual a la un idad , y el producto escalar de u n o cua lqu i e ra de ellos por cua lqu i e r o t ro , es cero, puesto q u e estos vectores son cada u n o de magn i tud u n i t a r i a y perpendiculares entre sí. Así,
i i 4 j j 4 k k 4 1;
i § f = j j r k * k ¡ 4 0.
l U t i l i z ando estas relaciones y la ley distr ibut iva,•• e l p roduc to ^escalar de los vectores
a i + 4 j + d , k v y l>b =¿,¿4,1 - ^¿ i j - f * f t i k
se puecle eva luar como sigue:
a d r b =P.(«1 i + % j + o 4 * ) ^ M + ¿* j + tt>k)
4- a , fe, j • i + a 2 bv. j j + a = t£ j k
+ « t fe, k r + a , A lg j + ^ =^¿M\,b+-\t alibi-dibz.
Desde luego, esto resulta inmed ia tamente de l a definición (2.15). Resolución' de 'vectores! La^componemtehúeuun • veoton a lerialalidcrec-
ción de (o según)un <vector u n i t a r i o ñ se define como:
aH =a a^íi. I2Í2I20)
S i # es ¡eíi ángulo c a r r e t a fiñi la componente de i a teri.ilaüdtrecóión d é í . es
a„ =a á> S =3 « i¡n[ ce* 0 - a eos 0.
Fie 18. La componentede a en. la -dirección dé- n es la .proyecció» i orientada ) VN dide • «obré ft.

' Productos escalares 61
I ; ig. lSimuestrala-interpretación geométrica de esto. L a componente a en la dirección de ñ es la proyección or ientada ON de a sobre íi
ti es necesario en su prolongación). La componente de a según un vector no c e i o -b se define como a-b ,
le
íi = \t/b =s (¿,„ bs. b3)f(b2 + b¡ + bl)
i el vector un i ta r i o en la misma dirección qué b.
ii a = o. i + a., j + d, k ,
entonces las componentes: de: a?erí las d i recc ione i i¿. j j . k ; 8 o n \ r e s p c c t i -imente
a i a a, , a j ~ Q<, a.-k == a¿.
>r tanto, las componentes -do a según >k>s le je i X r - v y-} y z-^osori idén-a las componentes correspondientes!idea a l l H a y ; que observar , !s in
lombargo, que este resultado no es cierto si a<se<téfiere atunisdstumalide coordenadas no ortogonal (ver ejercicio 45, sección 2.8).
EJERCICIOS
Si a T b son vector es según se dan en la tabla; >quet sigue., verificar i qué ios lucios escalares son como se muestran. ¿Cuál: «le los ares pitres tic vectores es
perpendicular? a hh a a-b
a) O) (I<1, M , i^O) (3<S, 1.4, :")5) * - l b) b) (4<4, l . fe-8>S) H * T I , 3,-V>7) -'"20
C) (3. 11, I 4) '(2, ír% 0.0!
2222; 'Empleando la1 -fórniulai k-b ^<\b roM, 61 aballar el i ángulo entre los vectores *i<0, *r l l 1> y. b«=4<3l.4( 5).
•*23. ilJn sistema de ejes cartesianos rectangulares está; d 'sp"* 5 ' 0 * ' e maneras que i el eje x apuatá .hacia el Este, el v hacia : el Norte y I el z vurticalmente hacia arriba. Kvaluar los productos escalares.de los-'vectores a y> b' en- los:siguientes casos:
a), a es de magnitud 3 y apunta! allSEli b eS de magnitud 2 y ¡apunta al E. I',b) a-es de magnitud 1 y apunta1 ah ft'Eb b' es1 de magnitud 2 y apunta vertical-
mente hacia arriba. - , c)i a eá de magnitud 1 y apunta al-iX£¿¿ b es de magnitud 2 y apunta al O.
2-124>i Si
demostrar que a fe i r h = H ^ 2 k>
(a +.b>(a -:2b) = - 9.
29. Demostrar que los vectores-i + j + * y fcl ~~ 2Xj + k son perpendiculares si y Mi Id SÍ X 1.

52 Álgebra escalar y vectorial
26. Hallar la componente de i en la dirección del vector i + j + 2k.
27. Resolver el vector 3¡ + 4j en las direcciones de los vectores 4i — 3j, 4i + 3j y k
28. Si a y b son tales que a = b, emplear el diagrama siguiente para interpretar geométricamente la relación
(a + b)-(a - b) = a 2 - i»2 = 0.
29. Probar vectorialmente que las perpendiculares a los lados de un triángulo desde los vértices opuestos, son concurrentes. [Sugerencia. Trazar las perpendiculares desde los vértices A y B del triángulo ABC de manera que se corten en O. Sean a. b y c los vectores de posición de A, B y C con respecto a O, Demostrar que
a - ( b - c ) = b - ( c - a ) = 0.
Deducir que e-(a — b) = 0 y dar la interpretación.]
2.7 Productos vectoriales
E l producto vectorial de u n vector a = (ax, a3) po r u n vector
J> = (b¡, b2, b:i) se def ine como:
a X b = ( « 2 bs — «3 b.¿, a 3 ¿/t - e/, bv a , b., — a._, h,) (2.21)
Al ternat ivamente , el p roduc to vectorird de
a = fl, i + a2 j + a:{ k y b - b¡ i + b, j + b3 k
se define por
|¡ j k| a X b = K « , fl8| • (2-22)
|* i b2 b3\
L a notación que se empleó en (2.21) an t i c ipa que el producto vector ia l
de dos vectores es un vector, y esta conclusión se comprobará ahora.
Pr imero , debe notarse que a X b c laramente satisface las condic iones

Productos vectoriales 53
( « ) v (/;) de Ja definición de vector, que se d i o en l a sección 2.2, y por lauto sólo falta demostrar que (c) también se satisface.
Poi convenienc ia , ponga
a X b = (a2 b3 - a3 b2, a3 bx — ax b3, ax b2 — a2 bx) - (cv c2, c,) .
Referidos a los ejes Ox'y'z' (de f in ido en la sección 2.2),
a = (a\, a\, a'3), b = (b\, b\, b'3) ,
y así, con respecto a estos ejes,
a X b = (a ' , Vs ~ a'z b'2, a\ b\ - <r\ b\, a\ b'2 - a\ b\)
1.a condición (c) será satisfecha si se demuestra q u e
i — Cl "f" 'l2 Cl "1" l\Z cz> tfj = lzl c, + l22 e2 + l23 c3, (2.23)
Z = 3̂1 CX ~T" 3̂2 C2 "t" CZ'
Al emplear la ley de transformación (2.1) para los vectores a y b , la can t idad <fx = a'2b'z — a'3b'2 se convierte en
ífx = (l2l ax + l22 a2 + l23 a3) (l31 bx 4- /32 b2 + l33 b:i) — (Ai ai + '32 «2 + *3s as) {ki bx + l22 b2 + l23 b3)
= V22 '33 - k» Í32) («2 b3 — o 3 b2) + ('23 hx - hi hz) K &i - « i b3) + (ki I32 - ¡22 hi) (ai b3 — « 2 bx).
Si se subst i tuyen los resultados d e l ejercicio 23, pág. 26 y se usan las def iniciones de clt c.¿ y c „ esto se reduce a
c'i — ln ¿i + /12 c2 + lx3 c 3 ,
la cua l es la p r ime ra de las relaciones (2.23). Las otras dos se ver i f i can de una manera s imi la r , y po r consiguiente la demostración de que a X b es u n vector, es completa .
A l in t e rcambiar a y b en (2.21) resulta que
b X a = (b2 as - a2 b3, b3 ax - a3 bx, bx a2 - b2 ax) ;
y por tanto
b X a = - a X b , (2.24)
lo que demuestra que la operación de multiplicación vectorial no es

54í l Álgebra escalar y vectorial
conmutativa.<¡Lúega es importante conservar el orden de los vecto en nini producto: vectorialal.
Si a.ab 'y e <son> tresevectores cua lqu ie ra , es fácil ver i f icar cjue
• J K ^ H - e ) ^ a X * r r * * « ; < • : (2.23)
por tanto; e l prpcluolot(veccoréal. obedécela ley distributiva. PrJàdubto$< vectorialei> delpapresde!vectores i , i j , k .kPues to <qupie
(1, 0, ü ) , j = (0, 1, 0 ) , k = (0, 0, 1 ) , se t iene
i j |k| 1 ! 0 i-0¡ = 0, i 100010
i ¡ j j k 1 1 0 0 0
0 0 1 10
y cuat ro relaciones fcimiiahes que- se obt ienen?tpqr permutación) cíclica d e l i , i j , Jk.kEàiccmjnptoio
i *= j $<4 j= k fe<*k= 6 ,0 , 1 1 i X ) j £=* ,k . j * : f c l ^ * Í , k l X * 4 = = j . j . \
(2.2o>
Estasi identidades' se deben 'comparar con las correspondientes de (2.19f
z z
x x
Fi«.' 19: EI.'prcKlurto.<vcctaTÍ«fc.iA K b ws 'ú^.m^mtiiá al> -sen- a <y estati CIIL'tla rlÍ!ÍTí ií'll) «lo k-

Prodasctom vectoriales 55
|Hfl incluyen productos escalares «le pares de vectores i , j , jk-'.ObSer-q i icpor (2.24), al intercambiar los dos vectores en cualquier primer ruibro del segundo conjunto de identidades (2.26), cambia el signo esa identidad; 1 por ejemplplj Y- * ^ ^ k - k -
I is ecuaciones (2i2(i) se pueden emplear junto con la ley distributi-, ^2.25) para evaluar product os vectoriales. Por ejempto¿osi si
i ton ees
uOK v «= (i + Sj + k) X (2¡ - j 4- 2k) = (2i X i - i X j + 2¡2X k)k+ (6j X i - 3j X j + 6j X k)
+ <2klXÍ i - k & C j ^ -agKfe íc ) =-(-rkk- 2j)ljf - f tWhf- < 2 ^ 4 ) ¡ l = 7i7-f- 71B Jt.
uta (embargo, es mucho más. conveniente empipar i (2.22). Por tanto i >
u i X ^ V
1 i j j k 11 S 31 2 - * V ! 2
Interpretación geométrica del producto vectorial. .Sean a íy b dos veo-sv y elija ejes rectangulares Oxyz tal que a y b sean paralelos al way.y OJc esté en la misma dirección que a. Sea a el ángulo entre
.y b, :medido en el sentado del giro desde Ox en el cuadrante positivo 1 plano xv (Fig- 19)- Entonces
nuio •
a a=o,i, i b r bx i + b. j
a X bfc= a ,0*k .
ambién, para esta configuración especial,
A, = a, bT = b sen a.
a X b f= ab sen a k-k tanto
(2.27)
isO <-ti « f c sen o > 0 y por tanto a X b está en la dirección Ot; y si : sen a < 0, entonces a X b está en la disección contraria Ot)Sita embaígo, si el ángulo entre a y b se define adecuadamente, la
iinerpnetacióii geométrica se puetle expresar en forma más conveniente, jraoiaigufije Séarcf tii ángulo entre a «y b ¡medido en el sentado del giro desde a a

56 Álgebra escalar y vectorial
Fie. 20. El ángulo 8 se elige siempre en el rango O ^ O ^ j t ^ E n cada diagrama, c es perpendicular a ambos a y b.
a b y elegido de modo que 0 ^ 0 ^ jt. Entonces e l p roduc to vectorial a X b es el vector ab sen 0c, donde c es u n vector un i t a r i o perpend i c u l a r a ambos a y b t a l que para u n observador que m i r e en l a dirección de c, e l sent ido en que 0 se m ide es el tle las maneci l las de l reloj . L a F i g . 20 exp l i ca la situación. Puesto que 0 ^ 9 ^ JI, l a magn i tud de a X b es ab sen 9, y su dirección es l a de c.
Dos vectores no cero a y b son paralelos o antiparalelos si y sólo si a X b = 0. E n efecto, si a y b son paralelos, 0=0; y si a y b son ant i paralelos, 0 = jr. E n cua lqu i e r caso a X b = 0, puesto que sen 0 = 0. También s i a X b = O y s i a 7 Í : 0 y c > ^ : 0 , entonces sen 6=0; po r tanto 0 = 0 ó jt, l o que demuestra que a y b son paralelos o ant ipara le los .
EJEMPLO 2. Demostrar que el área de un paralelogramo con lados adyacentes a y b es |a * b¡-
Solución. Represente por 6 el ángulo más pequeño entre a y b (Fig. 21). Trace una perpendicular desde el extremo de b hasta a. Dicha perpendicular será de longitud b sen 0. Por tanto, el área del paralclogramo es base x altura = ab sen 6. la cual es la '•• b|-
a Fie. 21.

Productos vectoriale 57
F.jr.MPM) 3. Hallar la forma más general para el vector r que satisface la ecuación
r x (1, 1, 1) = (2, - 4 . 2).
Solución. Sea r = («, b, c). Al substituir este en la ecuación dada, se tiene
(a, b, c) x (1, 1, 1) =(2. - 4 . 2). tanto
(b - c, c - a, a - b) = (2. - 4 , 2).
I emplear la definición de igualdad de vectores, éstos dan
b - c m 2. c - a = -4. a-b = 2.
las ecuaciones no son independientes, pero son compatibles; puesto que al sumar dos primeras dan
b - a = - 2 .
es la tercera ecuación. Va
a = h
tomes se deduce inmediatamente que
¿> = X - 2 , c = X - 4 .
r tanto, la solución general de la ecuación dada se puede representar en la forma
r = (L X - 2, X - 4) ,
e X es arbitraria. Obsenwciones. Si
r x a = b,
interpretación geométrica de productos vectoriales muestra que tanto r como a •n ser perpendiculares a b. Por tanto, si se dan a y b. la ecuación puede no
tener solución para r a menos que a sea perpendicular a I». Se puede demostrar (ver el ejercicio M al final de este capítulo) que la solución neral para r es
r = Xa + (a x b)/« 2 .
F.l lector puede verificar estas observaciones por referencia al ejemplo resuelto an-criormentc.
KJEMIM.O 4. Demostrar vectorialmente que las bisectrices de los ángulos de un ¡ángulo son concurrentes.
Solución. Considere las bisectrices de los ángulos A y 11 de un triángulo ABC que cortan en O. Sean a. b y c los vectores de posición de A, B y C con respecto
<>. respectivamente. F.ntonces
AC = c - a, C*B ^ b - c. BA = a — b.

5 8 Álgebra escalar?; y vectorial i
B
Fie. 22.
Alic.a Ijien. si û y > son vectores unitarios, la bisectriz, interna d<4: ángulo outre-ellos o paralela al vector û -f v (ver el ejercicio 17). Lofe vectores unitarios cm las' dirne- -
—>—» — * clones (de i £/í y HA sonni
bl> y • |ire|e¡' |a^-b|b!
Poi tarilo a es pai a lelo a a
a -a- -c e a b ,
|«!*cjè*" [ a ^b l lV
De igual modo b es pai alelo a a
b W a . b l r t c
[b4TT[ Ï | bW ]e| '
Kslas condiciones se pueden- expresar..como
y y
Puesto queiia ìi a » 0 y b X b ** 0,-estas se reducen a :
y
( i K [ > î ^ t ; + 9 "
0. éstas se reducen a a
(2.28)
M V 1
l.a- comlición île que. t.Yi ,debc!«cr<la IbisoetuB dctlulnjpalo 1ère € Se piqrdc'ahckai ieprcH sentara (pop- simetaríu delicti) a ronsauaigéeue

Productos vectorialekfs 59W
b i c X "
l I resultado'-(2 JO) se d e d u c e (polola 1 suman dcd<2.28).'Hy ( 2 4 S $9 )y obsérvala»» leiuetic: (a)'.'Ja m- c j « = \c f r a | ¿ i c o n ' r r e s u l U É i o d n s i n a i i a i k » ( p a p a i ^ A TT b|by jb ' -brl^y y (fe)"a K b * b h a w ©,<k K t 5 T ) < a , 4 l f t ? * c * b-b-
EJERCICIOS
30. Demostrar que, si ios vectores a y b son come Jos que se dan en las dodprpi i meras columnas de ta tabla siguiente, a H b tes como la ' que se da en la tercera . columna.
a a b a b
« ) « ) (3/-.. 7, 7 . 2)2) (1X3,1) í) (I/l. - I r l - 2)1') fe) (l/l-r-S,:?. 0 ) 0 , (- ('2J5, :0)(;i (0 / 0 . 0,(V1)I) r) 11 (8j 8 , 8, .V1) I) (5/5, 2) 2) . 0) 0 ) .
313 l.osoejes|( Oxyz\estáa;iicolB¿adad( d e líal amanera i qucuOx 'apunta al Este, Oy al !
Ndrteny O Í vcrticalmlenteichacia ;arriba. .Hallar el prmluct» -vectorial a X b blediloáos vectores <a y b * " fos^ «sigújentes tasos:
a) a es de magnitud ! y apunta al I-'., b es ilc magnitud 2 y apunta a 3 0 ° al N MefieEjE;
fe) a es de- mafragtüd'cl y apriman al E,¡b te; de ¡magnitude2 \ apunta al .SO: r) a asede magnitud I v apunta verticalnteute hacia -arriba, b es de magnitud 1 i
y apunta i al .iJÍR I".
32. Tornando:(componentes,, -demostrar la iJey distributiva para productos -vectoria-f a lesV espeoiaunteníe t e
a « (b(b- e) e=» a x b -V a X c- >
33. Demostrar que para cualquier escalar ?.,
a X (W)ht b fe 3Ká X b)b 31. Si Si
a X b fe a - r r b , b
enrostrar iqurue
35. Hallar la forma •• más general papa queuel-Vector* m -.satisfaga la i ecuación) n
U X (2, 1, 1-r-l) t̂ : <J/I), <0)(»í (2/1, l r - l>D •
:!(> Hiilbu'a y b M ai
(«i>4 *j/'r k)W (2 i^ £ 2 * Jkjte* i -r j * j .
373 <ElJrlk>toanuomu ejemplo. - - demostiar que .en pjCfjeaBlala !k-y< asociativa para. pío-duelos vectoriales' no se verifica-a sí misnw-esto cs^ cxñtéaea. A ly c takacqueue
a X (b'H c)&4*(* b)K) c e .

6 0 Algebra escalar y vectorial
38. Demostrar vectorialmente que las medianas de un triángulo son concurrentes. [Sugerencia. Sean E, F y O los puntos medios de los lados BC, CA y AB de un triángulo ABC. Considerar que AE y BF se unen en O, y representar los vectores de posición de A, B y C con respecto a O por a. b y c. Hallar los vectores de posición de £ y F, y deducir que
a x (b + c) = 0 y b x ( c + a) = 6 .
l'or tanto, demuestre que c x ( a < b) = 0, y deduzca el resultado requerido.]
2.8 E l triple producto escalar
A l escalar a-(b X c) se le l l a m a t r ip l e producto escalar. S i
a = ( « i , a2, a3), b = (bu b2, b3), c = (tv c2, *s)>
se tiene
Y por tanto
a ( b X c) = a-
a ( b X c) =
i j k K b2
c2 c3
«1 a2 «3 by b2 &3 Ci c2 Cz
Fácilmente se ver i f ica que
a-(b X e) = (a X b)-c;
(2.31)
(2.32)
esto es. el 'punto' y la 'cruz' se pueden intercambiar en un triple producto escalar.
Interpretación geométrica. Cons ide ra r el paralelepípedo con lados adyacentes representados por los vectores a, b y c como se i nd i ca en la r i g . 23, con b y c horizontales. E l v o l u m e n V de l paralelepípedo es "área de la base X a l t u r a " . Esto es
V = \(bc sen 6){a eos «p)|,
donde 0 es el ángulo entre b y c y ó es el ángulo entre a y l a ver t ica l hac ia a r r iba . Pero
b X c = be sen 6 k .
donde k es u n vector un i ta r i o vert icalmente hac ia a r r i ba . También
a - k = a eos 0.
D e lo anter ior se deduce que

El triple producto escalar 61
V = | a - ( b X c ) | . (2.33)
Fie. 23. Fl volumen de un paralelepípedo es a - (b e) -
Condición para vectores coplanares. Ivas vectores no cero a, b y c son coplanares si y sólo si
a (b X c) = 0.
Demostración. C o m o los tres vectores t ienen magnitudes no nulas , el v o lumen V de u n paralelepípedo con lados adyacentes a, b y c es cero si y sólo si los vectores son coplanares. Por tanto (2.33) demuestra que a, b y e son coplanares si y sólo si a ( b X c) = 0.
[ Nota. E l t r ip l e producto escalar u- (b X c) se anu la si dos de los tres vectores son paralelos o ant ipara le los ; pero el recíproco de este enunc iado no es verdadero.
EJEMPLO 5. Sí los vectores no cero a. b > r no son copla na i es, demostrar que cualquier otro vector A se puede expresar única mente en la foima
A = Xa + ub + ve. ¡
donde /.. n v v son escalares. Solución. Sean A-= (¿, . A.,, , a = (« , , a 2, « , ) , b = (fep *> bj y c m fjC¿, c2, c.,).
Entonces.
A = Xa + ub + ve si y sólo si
At = X«, + u¿», + ve,, A.¿ = Xa.¿ + u.b.¿ + ycr
A¡ = la3 + ft*a + vry

<<&2 i Álgalira escalar y vectorial
, Estas ceuararme» simultáneas.para )<u \i y V tienei» solución ú«iica si y.sólo, si
ai decir. a ( b K c ) f O .
• Esta condición se satisface porque at b y e no son coplanares y no cero, y así se obtiene el resultado requerido.
F J M M utm
.'i!L Por medió de oopaponcnlcs:.! o de otraiimanera; demostrar que
aab(b eOe) «a (a K)b^-c
In40>i Siv(», y, z) - «s.ioaatqnier piinto tabre ei plano que pasa por los puntos (x (, v.. ci)/',(x¿» y¿'-*2) y1 <»'«irigei»;.demostrar'que
x y y 2 lx ±fcO.
1 ;41lidDoaaostrar, que para todos los escahues /..
;a(é iH«b>(b * «•) * *<H * c).
4'J. Demostrar, que
4.'). Si
demostrar que
(a<á + b +ic>(b X' c) wth(h X-c).
A A , k^éjX&Wt \ A., = Xi¡ * ifc d 2 b + r 2 c. V Aa A.:¡ a | i 3 b 4- v.{ c,
\A,\(A.. A A,) = *-i l*iMi vtVi /.L, u.2 |t| ab(b <<)c)
VlMSTsri i I44L Demostrar que, .dados::cnalro< vectores, no- cero cualquiera ai,- b, c yl dv v existen
. • •escalurej p4. q; r y, no, iodos. ocroLa <ai| i que
pipu +itfb + »e AtUd fe 0.
[Svgrrenciaí CJonfctdere lo* casos a)cuando tus de los .vectores no> son coplanares. rV)ucuando ios cuatro vectores son coplanates.|
l >4S». Scaú-OAv f>X)Z,unsistema de : ejes rectilíneos oblicuos -(es decir, ejes, tales «iue (>\, OY y .Oí soB; rectas que no son mutuamente perpendiculares y no popla-nares) , y represente por |) Ju K los vectores.unitarios en las tres dirección*» coorde-nadas'. Si un vector A se expresa en forma
\ A =* 4 ,1 + /ti, J + 4j K.

t El triple • producto vectorial 63
• entonces A !. A . A .se llaman, las txMwponeniVs de' A;'Demostrar que dichas componentes no .son idénticas a las do A áolólargo de OX, OY pJOZ.
2A9 FElr t f jp l f »producto v e c t o r i a l
Vectores, i tales como a ( a * b ) X e y a X (b X c) se l l a m a n triples productos vectoriales. I,as siguientes identidades (demostradas a cont inua-« ion) se necesitan trecuenteniente:
(a(*.*J*);>c €P=^ ( « -c )b - < b c ) a ; (2.34)
a a. WJk X)c£ =£»(*}<*) b -ra(ár)h) c (2.35)
/>¿>ewosírac»óní E l e g i r e j e s O x y z con el eje x en l a m isma ! dirección • I«fuea> y a i a A q u f c b s e a p a r a l e l o 1 a p p i a n o xy (como en la F i g . 19, sección ' 2)7) i Entonces
a *=K<iA>.0W . b b-*?ib¿> b.JJ)Q), c = (cu r,, c , ) .
INHon tanto ,
aàC*lp=^) (a- Q?,a/í tV,), y, v resulta
(a(»;>bb>'X Í F 4 - ( * Í < A « T 0). (2t36) I También
(a ( » )d ) b -fli(h-?c) » =a ,rt I ; b -^(¿i, - f L». c a) a ^ = H ^ « , b 2 c 2 , a f í ¿ c.v 0 ) . (2.37)
AAí«aopiparaif2(%Í)6) y2(2;37) tala; i d en t i dad (2.31) tpieda demostrada. I L a segunda ident idad _"(2.*rS5)iatehibiéni. seUdemuestrá lábilmente, o em-
plpktahi lo 2(2¿)4)> ()QbicnfaciúnVMar** recordar -(2J31) y'-'(2.35) observe que «iularimoitile
I « ) k » v ce t or es i /<- - / / / ) d e>k>S).paréntesis'~dé da . i z qu i e rda aparecen una. ve/ a ¡ajuera (dé )k)8»páréntesi«f « lèi lai ••derecha; y ¡ en ! el ''trenti o " .aparece* pr imero I l e i ereotob be (Chda. té*niino< cont iene a a i -b y c una vez solamente.
l ^ t i , Los vectores a *• b representen»- los latios adyacentes «le un triángulo. • Demos-ti.ir que eli arcdidcsústc- es i/£|a H b|.
1747->dOemosirar la fórauila ('¿.:{.r>) ion < I uso • de. (2.34). [Sugerencia. Emplee' el- re-iulradd de que para dos «Jrtores icùalquiera1 A y* A K B = r̂ -B * A]
48. Demostrar que, si a. b v e no son cero y
ín(a Kb) x c = a M.(b *>c) ,

6 4 Álgebra escalar y vectorial
entonces (a) b es perpendicular a ambos a y c. ó (fe) a y c son paralelos o antiparalelos. [Sugerencia. Desarrolle de acuerdo con (2.34) y (2.35).]
2.10 Productos de cuatro vectores
A l gunas veces es necesario m a n i p u l a r productos de cuat ro vectores. Éstos con frecuencia inc luyen las fórmulas (2.34) y (2.35), j u n t o c o n los conocimientos de que e l punto y l a cruz s iempre son intercambiables en el t r ip l e producto escalar. Así, por e jemplo
(a X b)-(c X d) = a [b X (c X d)]. (2.38)
A l desarrol lar el t r i p l e producto vector ia l , resulta
b X (c X d) = (b d)c - (be) d.
y si se substituye en la ecuación (2.38) se tiene
(a X b)-(c X d) = (b d) (a-c) - (b-c) (a-d), así que
( a x b ) - ( c x d ) = ¡ ^ (2.39)
H e aquí otros ejercicios sobre productos de cuatro vectores.
EJERCICIOS
4'J. Demostrar que |a x b|-' = a » b s - (a'b)*.
:">(). Dados dos vectores a y r que pasa] por el origen, demostrar sobre un diamanta el vectoi (a r) - a. Deducir que la longitud de la perpendicular sobre a tlesde el punto con vector de posición r es
|a x r|V|(a * r) x a j .
51. Si a y b son vectores unitarios, demostrar que
|á X ¿¡2 - 1 _ ( a - ¿>-
Demostrar que ésta es otra forma de la identidad trigonométrica sen^ 0 = 1— cos2 0.
52. Demostrar que
a x (b x (c x a)] = (a-b) a x c .
2.11 Vectores anclados
E n mecánica, el punió de aplicación de una fuerza o su linea de

Vectores anclados 65
anión, pueden ser importantes ; l a fuerza, j u n t o con su p u n t o de ap l i ca-
i ion o su línea de acción, se d ice algunas veces que es u n vector anclado.
No se hace aquí u n análisis deta l lado, l o c u a l pertenece más aprop ia -
-l miente a cursos sobre mecánica.
EJERCICIOS
53. Sea ££ la línea de acción de una fuerza F, y O un punto dado. Entonces el momento de F con respecto O se define como
G = r x F ,
.Iñude r = OP es el vector de posición de cualquier punto P sobre la línea Demostrar que G es independiente del punto particular P que se elija sobre
54. Como en el ejercicio 53 anterior, el momento G de una fuerza F con respecto u un punto O está dado por la ecuación
G = r x F ,
• Iñude r es el vector de posición con respecto a O de cualquier punto sobre la línea de acción de F. Por substitución directa (o de otra manera) demostrar que los vectores de posición de los puntos sobre ¿é? están dados por
r = X¥ + (F x Q)/F2,
donde A. es un parámetro. ¿Cuál es la distancia perpendicular de O a ££t

C A P Í T U L O
unciones vectoriales de una variable eal. Geometría diferencial de curvas
8.1 Funciones vectoriales y su representación geométrica
E l lector debe estar ya familiarizado con la idea de función real /(x), es decir, de una variable real x. E n este capítulo se estudiarán las propiedades de funciones vectoriales F ( í ) de una variable real t.
Suponer que las componentes del vector
F(0 = ( / i ( 0 .M0 ./a (0 )
son funciones unívocas o uniformes de una variable real t. Entonces V{t) se llama función vectorial de t. En muchas aplicaciones, t es una variable continua y /,(£), f2(t) y / 3(í) son continuas1 sobre algún intervalo de t. Si esto es cierto, se dice que F ( í ) es una junción vectorial continua de t. Ejemplos de tales funciones son
F ( í ) = (2, ÍM, sen t) 0 < t < oc,
y F m _ W*. t> 3) para - oo < t < 2, * K ' |(2í2, 2, 6 Í - 1 ) para 2 < t < oo.
La función vectorial
F ( í ) = (1, t, i - * ) - 1 < t < 1
no es continua, porque como / crece desde cero la componente z, í _ 1
cambia su valor desde — oo a oo.
Representación geométrica de funciones vectoriales. Sea F(Í) una fun
ción vectorial continua representada por el vector de posición OP, don-
i Hablando con propiedad, una función es continua si su valor no experimenta ningún cambio brusco en ninguno de sus puntos. Sin embargo, para una definición más precisa de continuidad en un intervalo véase, por ejemplo, G. H. Hardy: Puré Mathematics (Cambridge, 1952), pág. 186.
67

68 Funciones vectoriales de una variable real
de O es el or igen y P e l p u n t o (/i(í), f2(t), fs(t)). Entonces, mientras t varía sobre su rango de valores permisibles, P describe u n a curva continua (en tres dimensiones, ver l a F i g . 24 ) . E s c laro que en general tanto l a magn i tud como l a dirección de F ( í ) variarán con respecto a t. ( U n vector es constante solamente s i su m a g n i t u d y dirección n o varían.) L a ecuación
OP = r = F ( í ) , (3.2)
z
y
X
Fie. 24. Curva en tres dimensiones descrita por un punto P cuya posición está dada por una ecuación del tipo (3.2).
o
Fie. 25. Curva que .se corta a si misma en X.

Funciones vectoriales y su representación geométrica 69
donde r = (x, y, z), se llama ecuación paramétrica de la curva descrita por P.
Deberá notarse que, aun cuando F(t) se considere como una función unívoca de t, pueden corresponderle al mismo vector F dos (o posiblemente más) valores de t: en otras palabras, puede fallar la correspondencia uno a uno entre los vectores F(t) y la variable í. U n ejemplo
sencillo de tal situación ocurre cuando F = O A es el vector de posición de un punto A en movimiento; en este caso, se puede considerar a t
a representar tiempo. Si el punto describe una curva la cual se corta sí misma en un punto X, como en la Fig. 25, entonces habrá dos
tiempos í, y í2, más o menos, por los cuales A coincide con X. En este caso
FÍA) = F(í 2 ) = OX.
Una situación similar aparece cuando un punto retrocede parte (o toda) de su trayectoria.
EJEMPLO 1. Un punto P tiene vector de posición
—> OP = a(cos 6, 0, sen 0)
con respecto a ejes cartesianos rectangulares Oxyz. Hallar el lugar geométrico o gráfica de P conforme 6 varía y a permanece constante.
Solución. Considerar los componentes
x — a eos 8, y = 0, z = a sen 6.
Ya que cos2 6 + sen 2 0 = 1, se ve que el lugar geométrico requerido es
X2 + Z2 = fl2, y — 0.
Así, conforme 0 varía, P describe el círculo x* + zz = en el plano zx.
Fie. 26

70 Funciones vectoriales de una variable real
EJEMPLO 2. Sean a y b los vectores de posición de los puntos A y B con respecto al origen O. Demostrar que la ecuación de la recta que pasa por A y B se puede expresar en la forma
p = a + (b - a) t, (3.3)
donde í es un parámetro (Fig. 26). Solución. E l vector de posición del punto B con respecto a A es
AB = h - a.
E l punto P con vector de posición r está sobre la recta que pasa por A y B (Fig. 26) si y sólo si
AP = (b - a) t,
donde t es algún número real. Notar que
OP = O A + AP, y por consiguiente
r = a + (b - a) t.
Ésta es la ecuación paramétrica de la recta que pasa por A y B, porque los vectores de posición de todos los puntos P sobre la recta se pueden representar en esta forma.
Observación. Si A es el punto (x0, yQ, z j , í el punto (xv y 1, z^) y P el punto (x, y, z), entonces las componentes de la ecuación (3.3) son
* = xo + ( x i - x o ) í - y = y0 + tox - y0) *> z = z0 + (zi-*<>)'•
Eliminando t, resulta
*-*<> = y - y 0 • " ' ' « - \
* i - * 0 Vi-y0 h-xo
Ésta es la forma común de la ecuación en coordenadas cartesianas rectangulares de la recta que pasa por A(xQ, yQ, zQ) y B(xv yv z¿ .
E J E R C I O O S
1. E l parámetro continuo t puede tomar todos los valores reales. Trace las curvas cuyas ecuaciones paramétricas son respectivamente:
a) r — (2 eos nt, sen n.t, 0), b) r- (sen nt, 0, 0), c) r = (t, \t\, 0), d) r = (í 2, í 3 - t, 0),
_ ív*« ~ ° ) P a r a - oo < í ^ 0 e' r ~ \(t, - f2, 0) Para 0 < t < oo.
1 2. Los puntos P y Q tienen vectores de posición
r p = ($2 + c, s, 1) . r 0 = (2t, t, t),
donde s y r son parámetros y c es una constante. Hallar el valor de c en el cual

Derivación de vectores 71
corten los lugares geométricos de P y Q_ y demostrar que el punto de intersec-es (2,1,1) . ¿Cuáles son las formas geométricas de los dos lugares geométricos?
S. Demostrar que tienen un punto en común las rectas cuyas ecuaciones paramem o s son
r = (1, 2, 5.) + X(0. 1, 0)
yI r = (0. - 2 . 4) + p(l, 2, 1),
donde X. y u. son parámetros. Determinar las coordenadas de este punto. ' 4. Si X y u son parámetros, demostrar que las curvas con ecuaciones paramétricas
r = (1 + X, 1 + 231, 1 + X)
r = (2u, u, 2 - 4 u )
son rectas, y que se intersecan perpendiculamiente.
> 5. Los vectores a ú y v son constantes, y s y í son parámetros que toman todos los valores reales. Demostrar que el lugar geométrico de un punto P con vector de posición
r = a + su + rv
(con respecto al origen) es un plano que pasa por el punto con vector de posición a y paralelo al plano de los vectores ü y ̂ -
~*> 6. Si 8 y <f s o n parámetros que toman todos los valores reales, demostrar que el lugar geométrico de un punto P con vector de posición
r = (eos 8, sen 8 eos <p, sen 8 sen f)
es una esfera con centro en el origen y cuyo radio es unitario.
3.2 Derivación de vectores
Suponer que, en algún intervalo de t, las funciones /,(i), ft(t) y / 3(í) son derivables una vez con respecto a t. De ahí que la primera derivada de F ( í ) está definida en el mismo intervalo como
dF = /dh dh dh\ dt \dt ' dt ' dt )'
(3.4)
La derivada de un vector es también un vector. Para demostrar esto se debe verificar que se satisfacen las condiciones (a), (b) y (c) de la definición que se dio en la sección 2.2.
Es evidente que la primera condición se satisface. También, puesto que /,(t), / 2(í) y / 3(í) no cambian por una traslación de ejes, se deduce que
dU¡dt, df2/dt, df3/dt

72 Funcione» vectoriales de una variable real
no cambian por tal traslación, y por tanto, se satisface la segunda condición.
Para verificar que se satisface la condición (c) de la sección 2.2, sean (//, //, f3) las componentes de F con respecto a los ejes fijos Oxxx2x3. Como en el capítulo 1 (Sec. 1.6), l¡¡ representa el coseno del ángulo entre Ox{ y Ox¡. Puesto que los dos sistemas de ejes se consideran como fijos, cada 1^ es independiente de /, y por tanto, al derivar las ecuaciones de transformación (2.2),
-dJ-^-dT- ( 3 5 )
Pero dff/dt, df//dt y df3'/dt son las componentes de dF/dt referidas a los ejes nuevos Ox/x/x,', y al comparar (3.5) con (2.2) se ve que la condición (c) se verifica a sí misma. De ahí se deduce que dF/dt es un vector.
L a definición de derivadas de alto orden de F no presentan dificultad. Por ejemplo, si fv f2, f3 son funciones de t en algún rango, derivadas dos veces, entonces la segunda derivada de F con respecto a t está definida en ese rango como
d 2 F d /dF\ /#/, d¿f2 dßf3\
dl\-dT) - {-dp'-dP'-dp)- ( 3 6 ) dt2
Aplicando el teorema ya probado para el vector dF/dt, se deduce inmediatamente que d-F/dt2 es también un vector.
EJEMPLO 3. Hallar los valores de X para los cuales el vector
A = (cos A*, sen \x, 0)
satisfaga la ecuación diferencial
d *A = - 9 A .
d*2
Solución. I'sando la fórmula para derivación.
dA = (—X sen >.x, X eos Xx, 0)
dx
y d=A
= (—X2 eos Xx, - X 2 sen Xx. 0). dx2
Así, la ecuación diferencial dada se satisface si X2 = 9. esto- es, si X = ±3.

Reglas de derivación 73
EJERCIOOS
Escribir las derivadas dr/dt y d2r/dt* para los siguientes vectores:
a) r = (2 cosjtf, sen*/, 0), ») r = (t, t, et), c) r = (\t\.t,0) (1^0).
K. Dado que
dr = \ — e—'(eos t + sen t), e-'(cos t — sen t), 0\,
dt
y que, cuando t = 0, p = (1, 0, 0), determina r. Trace el lugar geométrico del punto con vector de posición r para los valores de t ̂ 0.
9. Dado que la solución general de la ecuación diferencial
d*x
dt* + o)2 x = 0 (o) constante)
x = A eos iot + B sen OJÍ,
donde A y B son constantes arbitrarias, demostrar que la solución general de la ecuación diferencial
d2, + o)2 r — 0
di*
r = A eos oa* + R sen o>í,
donde A y R son vectores constantes arbitrarios. Si el movimiento de un punto es tal que su vector de posición r satisface la
ecuación diferencial anterior, demostrar que el movimiento está limitado a un plano.
3.3 Reglas de derivación
Las reglas para derivación de sumas y productos de funciones vecto
riales son similares a las correspondientes para la derivación de funcio
nes ord inar ias . S i X, a y b son funciones der iva bles de t, las siguientes
ident idades se ver i f i can a sí mismas:
d da d b
dt
d
di dt
d\ < da = — a + JL -—
dt dt
d ' da dh - - ( a . b ) = s - - . b + a . ¡ - f di ' di di
(3.7)
(3.8)
(3.9)

74 Funciones vectoriales de una variable real
d da dh - ( a x b ^ x b + a x - . (3.H.)
Estas identidades se demuestran fácilmente si los vectores se represen tan en forma de componentes.
P o r e jemplo,
d d — (a.h)=-—{a1 bx + a2 bz + a3 b3) dt dt
da. da, . da3 , db, db2 db3
dt dt dt dt dt dt
da db
dt dt
l a c u a l demuestra (3.9). N o t a r que en (3.10) e l orden de a y b debe observarse estrictamente,
po r l a p rop i edad no conmutat i va de los productos vectoriales.
EJEMPLO 4. Demostrar que la primera derivada de un vector unitario á(<) es siempre perpendicular a ú(t), siempre que la derivada no sea cero.
Solución. Se tiene que
a . á = l . y por tanto
.£ + a . = 0, dt dt
la cual da á. dk/dt = 0.
Puesto que ni á ni dá/dt son cero, se deduce por esto que deben ser perpendiculares.
EJERCICIOS
* (l(j. Demostrar las identidades (3.7), (3.8) y (3.10) que aparecen en el texto. También verificar que (3.9) se verifica a sí misma para el caso en que
a = (1, t, V), b = (*2, t, 1).
11. Con r = rf demostrar que, para cualquier función vectorial derivable r = r(X),
d r _ dr
dt~ di'
12- Demostrar que

La tangente a una curva 75
d / da \ / db \ de — Ua x b).c^ = I x b I .c + I a * I .c + (a x b).
di ' \dt ) \ dt J dt 13. Si
db . da a x = b x _
dt dt
todos los valores de t, ¿qué se puede deducir con respecto a a y b?
.4 L a tangente a una curva. Curvas lisas, lisas parte por parte y simples
E n esta sección y en las dos siguientes se estudiarán algunos conceptos importantes relacionados a curvas.
Suponer que u n a curva c o n t i n u a es el lugar geométrico de l p u n t o P cuyo vector de posición (con respecto a l or igen O de ejes fijos Oxyz) es
OP = r = r(0 = (x(t),y(t),z(t)). (3.11)
Sea Pr u n p u n t o par t i cu la r sobre en el que dr/clt existe y no es cero. Entonces, en este punto , dr/dt está a lo largo de la tangente a la curva y dirigido en el sentido en que la curva está descrita por P conforme t crece. Pa ra demostrar esto, sea t = t' en el p u n t o Pf. Luego
OP* = r(t').
De acuerdo con i " ,
d r - l í m ( X { í ) ~ X { n y { t ) " y { n Z { 1 ) " Z ( n \ dt *-*f \ t-V ' l - t ' ' t - t ' )
t-»f t - t'
p,p
s lím . t-^v t - t'
—>
l,s c laro que como t -> f, P se a p r o x i m a a P y por tanto P,P¡{t — f ) f inalmente está a lo largo de la tangente en P/ (Fig. 27). Así dr/dt está d i r i g ido a lo largo de la tangente a # .
Para de te rminar el sentido en que apun ta dr/dt, e l i ja ejes con o r i gen O e n f y con e l eje x para le lo a dr/dt. Entonces de acuerdo con O

76 Funcione» vectoriales de una variable real
FIG. 27. Conforme t -* V, P'P/(t — /') finalmente está a lo largo de la tangente a ^ en P\
dr dt ( í ° ° )
C o n f o r m e t crece, e l p u n t o P se mueve a través de O en l a dirección pos i t iva o negativa tle x según dx/dt sea mayor o menor que cero. De esto se deduce que dr/dt apun ta en l a m isma dirección en la cua l P se mueve a lo largo de conforme t crece.
La tangente unitaria. Suponer que en el p u n t o P \ con parámetro V, sobre l a curva con ecuación paramétrica.
r = r(/) í 0 < í < í „
dr/dt existe y no es cero. 1 Entonces e l vector
1 = dr/dt
Idr/dtl
(3.12)
(3.13)
se define como la tangente unitaria en P'. Si |rfr/dí| —> 0 ó oo conforme t —> t', entonces se def ine
dr/dt T = lím
.T*i'|«r/af| (3.14)
s iempre que exista el límite. A . . . . . .
Es c laro que T es u n vector unitario, y el razonamiento a l p r i n c i p i o
i Para la definición de una derivada en un punto extremo de un intervalo véase, por ejemplo, G. H . Hardy: Pure Mathematics (Cambridge. 1952). pág. 286.

La tangente a una curva 77
He esta sección demuestra que está d i r i g i do a lo largo de la tangente i la curva .
Curva lisa. Se d ice que l a curva con ecuación paramétrica (3.12) es lisa si T existe y es c o n t i n u a para todos los puntos en e l in te rva lo 'o ^ t Í J . D i c h o en términos menos precisos, l a suav idad de l a curva puede ind i ca r que no hay ningún cambio brusco en n i n g u n o de los puntos de d i c h a curva .
Curva lisa parte por parte. Sea
t0 < ¿i < í 2 • • • < í „ - i < i»-
L a curva con ecuación paramétrica
r = r ( í ) f0 < t < tn
se dice que es lisa parte por parte si a) r[t) es c on t inua en e l intervalo Í 0 < í < tn, y b) l a tangente u n i t a r i a T es c o n t i n u a en e l in terva lo <„ < Í < tn excepto en los puntos í „ f2, . . . , í n _ , . P o r tanto, u n a curva lisa parte p o r parte está fo rmada por u n número f in i to de curvas l isas, unidas extremo con extremo (Fig. 28 (b)).
Curva simple abierta. U n a curva l isa parte po r parte
r = r(t) t 0 < t < /„
se dice que es simple y abierta si u n va lor de t corresponde exactamente a cada uno de sus puntos. Po r tanto, u n a curva s imp le abierta no se cruza o se encuentra a sí m i s m a en cua lqu i e r pun to .
Curva simple cerrada. U n a curva l isa parte po r parte con ecuación paramétrica
r - r(t) t0 < í < tn
se dice que es simple y cerrada si sus puntos extremos (correspondien-les a t = t0 y t = tn) co inc iden , y a cada u n o de los otros puntos les < oí responde exactamente u n va lor de t.
U n e jemplo e lemental de una curva s imple cerrada es e l círculo u n i tario en e l p l ano xy, con ecuación paramétrica.
r = (eos t, sen 1,0) 0 < t < 2n.
F l lector debe ver i f icar que ésta satisface todas las condic iones de l a definición anter ior . Observe también que si los límites de t fueran 0 t ^ 4JT, e l círculo estaría descrito dos veces porque t cubre los límites, y por tanto, ya no sería u n a curva s imple.
A l gunos ejemplos de varios t ipos posibles de curvas se muestran en la F i g . 28.

78 Funciones vectoriales de una variable real
Fie. 28. Clasificación de curvas: (a) curva lisa. También se llama simple si se hace de un solo trazo, (b) Lisa parte por parte. Simple si se hace de un solo trazo, (c) Curva
lisa. No simple, (d) Curva simple cerrada (si se hace de un solo trazo).
Cambio de parámetro. L a curva con ecuación paramétrica
r = r(/) t0 < t <¿lf
t iene u n sentido (u orientación) d e f i n ido como la dirección en la cua l está descrita conforme t crece desde r 0 a E l sentido se i nd i ca a men u d o en u n d iagrama por u n a flecha sobre l a curva (Fig. 28). Es conveniente conservar el sentido de la representación en u n cambio de parámetro. Para garant izar esto, l a transformación paramétrica
t = t(u)
únicamente se considera admisible si dl/du es no negat iva en todos los puntos de l in terva lo t/0 ^ u ^ ult donde u 0 y ux son los valores de u correspondientes a í 0 y tv respectivamente. C o n esta restricción, u en n i n g u n a parte d i sminuye conforme t crece, y por tanto se conserva el sentido de la representación de l a curva .
EJEMPLO 5. Demostrar que la tangente unitaria a la curva
( i 2 ,2r,0) - 1 ^ / ^ 1 ( l , 4 - 2 í , 0 ) 1 ^ t < 2

La tangente a una curva 79
es discontinua en el punto t = 1. Verificar que la curva es lisa parte por parte, e indicar su sentido en un diagrama.
Solución. Se tiene que
dr _ {(21.2,0) para - 1 < I < 1 A " 1(0,-2,0) para 1 < t ^ 2.
Por tanto
t = ( ( T t ^ ' ( i l V i , ( ) ) p a r a
(0,-1,0) para
1 ^ / < 1
1 í$ t < 2.
esto se deduce que, en los puntos extremos t = l de los intervalos — 1 ^ í ^ 1 y 1 ^ t 2,
J t = ^ (1 ,1 ,0 )
t = (0,-1,0),
respectivamente. Por tanto es discontinua en t = 1. La curva es lisa en cada uno de los intervalos separados —1 ^ í ̂ 1, l ^ t ^ 2 ,
porque a lo largo de cada uno de ellos, T es continua, y no es el vector cero. Además, r(z) es claramente continua en el punto t s l .
0 ,2 )
(1.-2)
I ic 29. Curva formada por una parte de la parábola y- = 4x y por la recta x = 1.
Por lo que se deduce que la curva es lisa parte por parte. La curva está completamente en el plano xy. En el intervalo — 1 ^ £ ^ 1 la forma
una parte de la parábola y* = 4x; y en el intervalo 1 ̂ t ̂ 2 una parte de la recta x = 1 (FIg. 29). Las flechas indican el sentido de la curva en el diagrama.
EJERCICIOS
"4 ffl* Ilustrar en un diagrama las direcciones de dr/dt en los puntos t = 0, í = 1 y t — —1 para las curvas cuyas ecuaciones paramétricas son:

80 Funciones vectoriales fie una variable real
a) r = (2 eos 1*«, sen fe!. 0) ( - 2 s ^ í s ^ 2 ) ,
b) r = í« - i , 0) (-00 < t < oo).
Clasificar las curvas de acuerdo con las definiciones en esta sección.
15. Demostrar que la tangente unitaria a la curva
r = ( 3 ,M 2 ) es
f = (0,l,2i)/(l+4/2)*.
16. Trace la curva con ecuación paramétrica
r = ((.|sent|,0) 0 < t < 3x.
y demuestre que es lisa parte por parte. Trace la curva con ecuación paramétrica
_ í(scn t, eos f, 0) para 0 ̂ í < ~ {(I, l*. - t, 0) para U < t < §TT,
y demuestre que es lisa. [Sugerencia. Demuestre que r y la tangente unitaria T son continuas en el punto t = \n-]
3.5 Longitud de arco
Sea
r = r(/) = (*W,M*).*vl)) h^t^ti (3-15)
la ecuación paramétrica de una curva ^ lisa parte por parte. Se define
ds di
dr
di = (*2 + f + z2)\ (3.16)
donde x, y y z representan a dx/dt, dy/dt y dz/dt, respectivamente. Entonces
s(t) = \(x2 + f + z2)ldt (3.17)
se define como la longitud de arco de desde el punto con parámetro f0 hasta el punto (variable) con parámetro t. La longitud total de la curva se define como s(t,) = <g. Observe que s(t0) = 0.
En los puntos donde ds/dt es finita, no cero y continua, el elemento de arco ds correspondiente a un incremento dt en r se define como
ds = (*2 + y2 + z2)*dt = (dx2 + dy2 + dz2)1;

Curvatura y torsión 81
tiene obviamente, u n a interpretación geométrica i n tu i t i v a , como se d ica en la F i g . 30, y también las def in ic iones ,(8.16) y (3.17) se vuel-
': más c laras. >b t o m í Li . l i ^ h s t i t ^ lorntoit O J I D Í I M I t o v rw s t ru Por la definición (3.16), ds/dt > 0, y por tanto, l a substitución t '= t(s) un camb io admis ib l e de parámetro. E n términos de s,
r = r W = K v ) , , W . z W ) 0 (3.18)
está se' l l a m a la ecuación intrínseca de la curva . Por supuesto, la tangente uni tár ia 'T se puede obtener fácilmente de ^ecuación intrínseca. E n ciento,,-al subst i tu i r (3.16), las expresiones
.13) y (3.14) se reducen a
« d v m b tílwiit srui nsoriol ft/ / í* ephtlinu :••»*:ajyt m í
V* I fcbU M¡qtJC l '; ,:S-.5.Kl0q ., \ « * ,.«*.. ^ « í / , Í , . „ . , , • : . , I , ... >
fcft *(0S.Í) aityms f (!£.£) rioóeviwb si r.«p;d onoiaÍK] ra i¡,m<,m-.>b
tSJtnu iotr>* ."f* -tun^Htí oii.iii.u wírSf .11;
Fie. 30. Interpretación geométrica del elemento de
» <T •» . - x T -r r l x V!> ~ -' * • • «V. * \ i t »
R U in i o t i e* óVÜV. o j p n l 18. Hallar la ecuación intrínseca doikf.eurwai cen/gettadián, jMwamétrlcai'/'U ^
r = (a eos í, a sen t, &/) 0 t ^ 2*.
|W> . * » - - 5 3.6 Curvatura, y torsión •"**4av u* *>í.t»t!wKMÍnK|ou{ 9 0 t o m a OJ*,» .1 -jf» ÍIOÍMIUI ClfU » t jbítob
Sea f U tangente un i t a r i a a .la curvaron.ecuación intrínseca r = r(s),
y representar ,t g oisacp OOi (ti rfonid b b m .11 IT> ¿t*5 .MltJC'tíir,: , ^ I t l OiU¿:*| III.' IB ui.U < MJ {> U ' ' I•' 1 i.n.'l
• . •.! f !»1 OI ^ . K ' N * ^ V» i vi- • / (3-20)

82 Funciones vectoriales de una variable real
donde * es una función positiva de s y Ñ un vector unitario. £1 ejemplo resuelto al final de* la sección 3.3 muestra que ÍV es perpendicular a t*: se llama vector unitario normal principal. E l factor de proporcionalidad K se define como la curvatura, y es una medida de la razón en la cual cambia la dirección de la tangente con respecto a s. Por ejemplo, si la curva es una recta, T es constante en dirección y en magnitud, por tanto K = 0. La cantidad p = * _ 1 se define como el radio de curvatura.
Otro vector de importancia en la teoría diferencial de curvas es el vector unitario binormal, definido como
B = f x Ñ . (3.21)
Los tres vectores unitarios "t", fV y ft forman una tríada derecha orto-normal (Fig. 31).
La derivada de 6 con respecto a i es paralela o antiparalela a Ñ. Para demostrar esto, primero haga la derivación (3.21) y emplee (3.20), asi te
Fie. SI. Vector unitario tangente f , vector unitario normal principal ft y vector
unitario binormal ft en un punto particular «obre la curva.
obtiene la ecuación
* Js di
Luego es normal a 6 y por tanto está en d piano de fl y f . Pero *í X dft/ds es normal a 1\ y por tanto
~ - - T Ñ , (3.22)
donde x es una función de t. Este factor de proporcionalidad u.* Ilam < torsión de la curva, y es una medida de la razón en la cual cambia la dirección del biuoimal con respecto a s.
Para curvas que están en un plano I I . T claramente está en \\. por tanto Ñ (que es projx>rcional a la razón de cambio de ? ) también está

Curvatura y torsión 83
en n . P o r tanto, para u n a curva p lana , 6 es u n vector constante per
pendicu lar a I I y l a torsión es cero (x = 0).
EJEMPLO 6. Considere la hélice circular, definida paramétxicamente como
r = (a eos t, a sen t, bt), (3.23)
donde a y b son constantes. Igualando las componentes
x = a eos t, y = a sen t, z = bt,
y por tanto, para todo t
x2+y2 = a2.
La curva está sobre la superficie de un cilindro cuyo radio es a y cuyo eje es Oz. Tiene sus espirales alrededor del eje z, como se muestra en la Fig. 32. Para esta curva
y
Fie. 32. Hélice circular.
I'or tanto

84 Funciones vectoriales de una variable real
También
(ÍS.E)
" Ñ = f = ^ ( c o s ' - , c n ' - 0 ) -rurraíToqrnco ?.¿I obucumgl .«tttifm-u.i
(3.25)
De lo anterior, se deduce que el normal unitario principal siempre es paralelo al plano xy. También, al igualar las magnitudes de los dos miembros de (5.25), la
* Ol.«' ' ' il.C .otilfcl ufa V
curvatura es
K = \a\¡{a2 + b2). (356)
'Pero por tas ecuaciones (354) y (3.25) ftttt S.H.4 $t .Jjil ¡kl 113 KltOUm Oni<>3 .X 3{3 1 ib IW.')0{fíf!K r»|jn¡q?.?> >ÍV W! ¡ ;
Así
ß = t > < Ñ 7 K,a2°b2)3l2(b¡*nt-b™t>a)-
ß = t x Ñ = ^+W2{bsení,~bcost'a)'
y con el empleo de (3.25) esto se reduce a
-ab ...-(eos- /,sen /,0),
Por tanto, la torsión de la hélice es
\r=bi(*2+iñ?i i *—<<\
Notar que cuando b = 0 la curia se redjicea un ¡círculo de radio |a¡ en el plano xy. Como se supuso, la curvatura! os^elitonces l~7j2rkl(por (356)), y la torsión es cero (por (3.27)). I Je*
(357)
tulu i b 3->itaH .Se oil
Fie. 33. £1 ángulo ^ está definido como el ángulo entre la tangente unitaria y el eje x.

Curvatura y torsión 85
EJEMPLO 7. En este otro ejemplo se demuestra que, para una curva plana en el pl.nHt xy, si la tangente unitaria en la dirección de s crece y forma un ángulo ^ con rl eje positivo x, entonces el radio de curvatura p está dado por
p = \dsjdifj\.
(l-sta conclusión se acerca a la definición elemental usual de p para una curva plana.)
Solución. En términos del ángulo ^ (Fig. 33)
t = (cos-^sen^.O),
y por tanto
df _ djjdf ds ds diji
¿ i ttoharasafa .Í»9 •aoot-m'*M«|A T.£
= — ( —sen ¡A, eos ifj, 0). WSA o í t» v-s^um \t o h i u ^ étvi 3 » w c n a t i J w t t 3 » ir»tttivttv><iw<» ¿ « A
U« .avaiiffi •.»;. f*\ oifíwcj m i o) K l m h u s q cnu o h o s u O »aHtll3 »m* 3b ftj¡ cual se deduce comparando con la fórmula
l o i ^ •' « : ; ' ¡ uio'ií'j ,C\ >[) ndtatoq 3b 104 •- ta (tyi -•-1 ,1 OCJIU3.ÍJ
~1£ — *cÑ' .".|e3i no3 1 • u gj ^ v orneo namísb 3«
que (8v.;
¿fe I" BJn3e3?c|3't i ibtiob | p f i/ i - •» «viiiJ <;! .>b o,;.; -ab buñ^noi ;-: ; ¿ toq tsJu-tóvnp •( Así el radio de curvatura es
w c f o i a A txiíU3tj mi no s l i nu i i sq r.l toq BJtsud
¡s-i _
Notar que
f—senteos U»,U) cuando ttf/W > O
(sen fp, —eos tff, 0) cuando ík/</t/f < 0.
EJERCICIOS
-^19. Demostrar que el vector tangente unitario a la curva TOq • ¡-i. ••! ;vi;j^ d no taqbnhq Unnoo (MtSJinu ioj33tf b ¿3 / ifanx>b
r = (4 ce*./, eos 2/, 2í 4-sen 2/) áé»:'í> Í . ; ÍHJ OÍ G r ,\ r i / 3ln3»ílt>j ÜOJ33V b b f!<>tx»3'lil) &1 Í13 t. Olflül lOq
T & (•<-sení,Ttsenrcos¿>eos2í). AYÍU>U\
llemc^trap íamk^.que te;cupf .es. .¿( l4,^V)l* ^«VMN & |3*«** V
i £50. Encontrar por turno T , N y B , y verificar que la> curva parabólica plana •

86 Funciones vectoriales de una variable real
r = (f,i*2,0)
tiene torsión cero.
21. Con la notación empleada en el texto, demostrar que
¿ Ñ ~ ft — = - K t + TÉ. ds
[Sugerencia. Derivar la relación N = B x T-] Nota. Este resultado, junto con las relaciones dT/ds = K N y dB/ds = — T N , cons
tituyen las fórmulas de Frenet-Serret. Dichas fórmulas son fundamentales para la geometría diferencial de curvas.
3.7 Aplicaciones en cinemática
Las componentes de aceleración de un punto que se mueve a lo largo de una curva. C u a n d o una partícula (o u n pun to P) se mueve, su posición con respecto a u n sistema de coordenadas dado dependerá de l t i empo t. S i r = r(t) es e l vector de posición de P, entonces la velocidad v y la aceleración i c on respecto a u n sistema de coordenadas elegido se de f inen como
v = i, f = f = v, • (3.28)
donde r representa dr/dt, r a d 2 r/dí 2 , etc. Representar por s = s(t) l a l ong i tud de arco de l a curva r = r(t) cu
bier ta por l a partícula en u n t i empo t. Entonces
v = f = s% = sf, (3.29) as
donde s es l a rapidez de P y T el vector tangente u n i t a r i o d i r i g i do , en cada instante, en el sentido en que P se mueve. También
= sf +p-is2Ñ, (3 30)
donde N es el vector un i t a r i o n o r m a l p r i n c i p a l en la curva descrita por P y p es e l rad io de curvatura . Las componentes de aceleración son por tanto s en la dirección de l vector tangente y s2/p a lo largo de la n o r m a l principal. Este resultado no está restringido al movimiento plano.
Las componentes de aceleración en coordenadas polares. E m p l e a n d o las ideas in t roduc idas en este capítulo, se pueden deduc i r las fórmula*

Aplicaciones en cinemática 87
O
Fie. 54. Los vectores unitarios í y 8 en coordenadas polares r, Q.
bien conocidas para las componentes de velocidad y aceleración en términos de las coordenadas polares (r, 0). Si r y Ö representan vectores unitarios en el plano r, 0, tal que t apunta alejándose del origen O, y 0 es normal a f j en la dirección en que 0 crece (Fig. 34). Primero se demostrarán dos resultados auxiliares importantes, a saber.
di
de
dj dO
-t. (3.S1)
Emplear ejes cartesianos rectangulares: Ox en la dirección 0 = 0, Oy en la dirección 0 = y Oz para completar una triada derecha. Entonces
Por tanto
t ff (cos0,sen 0,0), é = (-sen$, eos 0,0).
^ - (-senfl, cos B, 0), ^ = -(cosö,send, 0),
y las formulas requeridas (3.31) se deducen inmediatamente. Luego el vector de posición de P es
y por tanto r = ri.
rr + rÓè.
(3.32)
(3.33)
Las componentes radial y transversal de velocidad son por tanto r, r0 respectivamente. También
ff . n + rótt + iré + rW + ré*-
( f - r ^ f + ( 2 r t f - K N 9 ) « . (3.34)

88 Funciones vectoriales de una variable real
P o r tanto, las componentes r a d i a l y transversal de aceleración son r - ré2 y 2f0 + r'Ó.
EJEMPLO 8. Cuando un electrón se mueve en un campo magnético, experimenta una fuerza ey x R. donde e es la carga electrónica, v la velocidad, y B el vector de inducción magnética. Por tanto, si f es la aceleración y m la masa del electrón, su ecuación de movimiento es
mí = ev x B. (3.35)
Si B es uniforme e independiente de i , demostrar que la trayectoria descrita por el electrón es una hélice circular.
Solución. Si el eje z se elige en la dirección de B de modo que B = BU, y si r es el vector de posición del electrón en un tiempo t, entonces (3.35) será
•>n . i -tum.ptr un ; ;p l « j ,tj ,* oct&tcj & tra «omitan Oí • \.f .giH) : • ;¡r* K p r x k , d t n f i fi Icm*»n o~J$&)
donde P = eB/m y el punto representa derivación con respecto a t. Luego
. r = xi+yj + zK, ' ' .Vi
xi+yj+zk = p(xi +yj+zk) x k .
\. T - * — R . tanto
>'v ' .*> Vi >!>>0»liii >'•'. os *- * --^Kftrsns1 i . Ortl • • -> i ti •• ;••••» i i ;il»piVÍ Separando en componente*,,, ; , . v l í , „A CT«q l O ; A | n - A v m i b d I »
> - - p * . * - 0 . (3.37)
Si se elige el origen1 en la posición de la partícula cuando f = 0, y la dirección del eje x de manera que la velocidad inicial de la partícula sea ni + iek (esto es, con tal que la componente de la velocidad inicial sea cero en la dirección y), entonces las ecuaciones (3.37) tienen que resolverse de acuerdo con las condiciones iniciales
, - A . v o s ) — - . ,0.Veno,nní»~ ) «• s r x = u, y = 0, z = w, (3.38)
^ ' x = y = z = 0 (3 39)
La solución de la última de las ecuaciones (3.37) se obtiene inmediatamente por
z = wt. (3.40)
A l integrar las dos primeras ecuaciones de (3.37) y empleando las condiciones iniciales resulta
± = py + u, y = -px.
Substituyendo estos resultados, las dos primeras ecuaciones de (3.37) se pueden rcpre-sentar ahora como
x+p2x = 0 y y+p2y = -pu.
Por tanto, las solucionas generaies^para '* y y son r- 'i
X == A co&.pt + Bscnpt,

Aplicaciones en cinemátú 89
donde A, B, C y D son constantes arbitrarias. AI emplear las condiciones iniciales (3.38) y (3.39) se deduce fácilmente que A = D = 0 y 1! — C = u/p. Por tanto
u u x = -senpr, y = -(cospt-í), z = wt,
P P
y éstas son las ecuaciones paramétricas de una hélice circular con eje x = 0 y
y = ~U/P-
E J E R C I C I O S
22. En un origen O sobre la superficie de la Tierra, el eje z apunta verticalmente hacia arriba. Una partícula que se mueve por la influencia constante de la gravedad solamente tiene aceleración
d2t - (0,0,-*),
donde r es el vector de posición y r representa el tiempo. Si la partícula se proyecta desde el origen cuando t = 0 con velocidad (u, 0, v), demostrar, por integración de la ecuación diferencial anterior, que el lugar geométrico de su trayectoria es
r = (ut,0,vt-igt2).
23. Una partícula se mueve con velocidad v y aceleración f. Demostrar que el radio de curvatura de su trayectoria es
p - t r > x f | . Use esta fórmula para determinar el radio de curvatura en el origen de la trayectoria de una partícula cuyo vector de posición en un tiempo t, es
r = (t,t2,ñ.
24. Un punto se mueve de modo que su vector de posición r satisface la ecuación diferencial
d2r .dr
-a¥ = g~Xdt'
donde / representa el tiempo, g es un vector constante, y X una constante escalar. Si el punto está en el origen en un tiempo i = 0 y luego se mueve con velocidad u. demostrar que
r = ^{\t + e-Xl-\) + "(l-e-*').
{Sugerencia. Demostrar primero que
Entonces multiplique esta ecuación por e^' e integre.]

C A P Í T U L O
ampos escalares y vectoriales
4.1 Regiones
E n el estudio de l análisis vector ia l trataremos con funciones def in idas bre ciertos conjuntos de puntos. Po r lo que es conveniente i n t r oduc i r
aquí algunas def in ic iones asociadas. Región abierta. U n conjunto de puntos const i tuye u n a región abierta
del espacio de tres dimensiones s i : a) cada par de puntos de l con junto se puede u n i r po r u n a curva con t inua , la cua l esté cons t i tu ida enteramente por puntos de d icho conjunto , y b) cada pun to es el centro de una esfera que únicamente cont iene puntos de l con junto .
Región cerrada. U n con junto S de puntos const i tuye una región cerrada s i : a) cada par de puntos de S se puede u n i r por una curva con t inua que esté const i tu ida enteramente por puntos de S, y b) los puntos que no están en S f o rman u n a o más regiones abiertas.
Frontera. U n p u n t o P perteneciendo a u n a región cerrada 0t se l l a m a punto frontera si cada esfera cuyo centro esté en P contiene algunos puntos que pertenecen a 01 y a lgunos puntos que no. U n con junto S de puntos frontera de &t f o rman u n a frontera si cada par de puntos de S se puede u n i r po r una curva c on t inua que esté const i tu ida enteramente por puntos frontera.
Las def in ic iones anteriores, que se ap l i can a conjuntos de puntos en el espacio de tres dimensiones, se pueden mod i f i car fácilmente para de f in i r regiones abiertas y cerradas y fronteras de conjuntos de puntos en u n p lano : s implemente se reemplaza la esfera po r sus dos contrapartes d imensionales, el círculo.
U n senci l lo e jemplo de región abier ta es el con junto de puntos (x, y, x) tal que
* a + y + * 2 < 1;
esto es, el con junto de todos los puntos que están dentro (pero no sobre
91

92 Campos escalares y vectoriales
l a super f ine dej la esfera que tiene rad io u n i t a r i o y está centrada en el or igen. S in embargo, e l con junto de puntos (x, y, z) ta l que
x2+y2 + z2 ¡$ 1,
const i tuye u n a región cerrada.
1. ¿El conjunto de todos los puntos del espacio constituye una región abierta o cerrada?
ir el conjunto de puntos (x, y) del plano xy tal que
1 < x2+y2 ^ 2.
Explicar por que este conjunto no constituye ni una región abierta ni una cerrada.
• • v . w n i , u t o f c a a i n t n a m i m ] l a h o - u m <¡,:ií . .m. o b oii>< • •- \-> . 4.2 Funciones de varias variables
E l lector que tenga pocos conoc imientos sobre funciones, d e variables indcj>cndicnics, en es1 ta sección encontrará' brevemente expl icados m u chos de los conceptos y réstil'tados q u e utilizará más adelante. 1 C o m o se tratará p r inc ipa lmente con (unciones de tres var iables reales independientes, e l estudio estará l im i t ado a -este caso. S i n embargo, muchos de los resultados citados se ext ienden de u n a manera obv ia a funciones de más de tres var iables.
E n toda esta sección, las variables independientes x, y, z son coordenadas cartesianas rectangulares en el espacio t r i d imens i ona l .
Continuidad. Sea /(x, y, z) la función d e va lo r rea l d e f in ida en todos los pun ios en una región abierta que cont iene e l p u n t o P(a, b, c). S i Q_(x, y, z) es cua lqu i e r o t ro p u n t o en la región, se d ice que /(x, y, z) es continua en e l p u n t o P\a, b, c) si l a d i f e renc ia • ? l ^•'••"•t ''• '«q •;i";-> tv ai »i«o \ íu;unol ^ >b B i y jno i l *>u
f(xyyrZ)-f{<*rb,c)
entre los valores de / a Q y P t i enden a cero s iempre y cuando Q se a p r o x i m a a P a lo largo de la trayectoria.
Derivadas parciales. L a der i vada parc ia l de p r i m e r o rden "df/()x de l a función Hx, y, z) c on respecto a x se def ine como iTTJtirv; ,.on 'HJS "To-jf OT5l«9 ffl ia: ;ui imi 'M •• aí&m uqimfc u n d q n u ti'.»
f(x + h, y, z) - f(x, y, z) •' ' •"••¡' '•"•! -'b o tuu j j g » ; i v.-^^\h •u.^'.ri yb olqnt >: > ol * 4 J )
••ffl Irl ÍJ » Se puede encontrar más información en los siguientes libros: P. }. Hilton: Partial
Derivatives (Routledgc and ;Kegan' PaUl); y Tjt,. Courant: Differential and Integral Calculas (Blackic).
'•« ° !> : ; - -q) «final» n*u«s .».¡p í-oinuq ,>..'•> ¿oboi cKuqna-) h ,«;> t <!<•:>

Funciones de varias variables 93
pre y cuándo exista el límite. Se deduce qué gpftjBt se obt iene a l var / con respecto a x, t ratando a y y z cómo constantes. Las der i -
v.ulas parciales de / con respecto a y y z se de f inen análogamente. H a y r tanto tres derivadas parciales de p r ime r o rden de f{x, y, z), á saber,
a/ 3/ a/ a * ' ¿ y a * '
También se representan algunas veces po r
fxt /y> fz-•mX ms} n » \
l i o 1. Hallar / , / y / para la función "H"*'::.'- ^ ci . f lMittrY fi.l Gi£q jigoícnB nóbcton un» ¡:.>••••
/ = x 3 + ^ t r x í f ^ ; e a b m.c .... Solución. Tratar a y y z como constantes y al dcrbar / con respecto a x, se obtiene
ediatamente 1 ' " * ' ' ú > n d h n a U b Blvdo ann B9lqai3
/* = 3x 2 4 - 2 x ^ 4 - ^ . , • . ;
Análogamente, tratando x y z como constantes.
y a x y y como constantes
Suponer que e l valor requer ido (le tmá der ivada parc ia l en u n pun to par t i cu lar (x n, y 0 , z„) es f,. Entonces, además de l proced imiento obv io \ , , , , s *«»qwr tina ¡ffirrarnui t nhab i« » de eva luar fx y hac iendo x = x„, y = y0 y z = z 0 en l a función ;(x, y, z), o también y = y0 y z = z„, ha l l a r la der ivada jCpn respecto a x , y f ina l mente hacer x = x 0 en el resultado. Así, cu p l ' e j emp lo anter ior , se v io que
Urna KKJ v /x(*o»3'o»«o) = 3XÍÍ4-2XO>'O+7O^O-
También se tiene (*É 1 "'/•' f * * * W1 - }-g
f(x,yo,*é) * " ••&-*t*fyh-r-xyo*o-
E n consecuencia nóbmd K l «M.O ,<Vx6\\«« f * * * J I I M u * * * !
y po r tanto, según lo anter io r Ksmsami a * ¿wtub ,T. r, «»J-Í neo uinwnitibisq 1 . ,M i¡-. 1 / .nimuktK
fx(xo,y0,Zo) - 3x (54-2xoy 0+>'o^o-• A .1 M BU 3 i»
Derivadas parciales de alto orden. Es c laro que las derivadas parcia-

94 Campo» encalare» y vectoriales
les de pr imer o rden de /(x, y, z) serán ellas mismas funciones de x, y y z. C u a n d o estas derivadas parciales se de r i van parc ia lmente con respecto a x, y y z, se obt i enen derivadas parciales de segundo orden. Las
derivadas parciales "df/d* t o n respecto a x, y y z se representan respect ivamente po r
Se emplea una notación análoga para las derivadas de segundo orden
que se o r i g inan de cV/dy y df/dz-Las derivadas de a l to o rden se de f inen de u n a manera análoga, y se
emplea una obv ia extensión de l a notación anter ior .
EJEMPLO 2. Hallar o3l/d*a para la función
a 2 / a 2 / a 2 /
3 * 2 ' 3 . y3* ' dzdx'
o a l ternat ivamente po r
/ = ( * + 2 y + 3 * ) 4 .
Solución. Se halla inmediatamente
dz = 4 (x+2y+3z) 3 ^ (*+2y + 3a-)
= 12(x-r2y+3s) 3 .
y al derivar nuevamente con respecto a z,
*3 a 2 /
1 2 x 3 x 3 ( x 4 2y4-3* ) 2 ,
y por tanto
3 7 3 * 3
1 0 8 x 2 x 3 ( x + 2>'-r 3*)
648(x+2y4-3*).
EJEMPLO 3. Hal lar d2f/dy 3 * y cV//9* cry para la función
/ * sen (a*+frjM-l'),
donde a, b y c son constante». Solución. A l derivar / parcialmente con respecto a x,
df 4- = acos(ax4-¿y4-r2).

Funcione» de varia» variable» 95
con respecto a y, \J
a 2 / , up
^y^x = —ab%ea(ax+by+cz).
bien al derivar / parcialmente en respecto a y, a/* ¿- = bcos(ax+by+cz). óy
Por tanto
A Z - = —obten (ax+by + cz).
En el ejemplo anterior, se observa que = por tanto, en este caso, es indiferente el orden en que se realizan las derivaciones x y y. Lo mismo ocurre para casi todas las funciones que aparecen comúnmente; en efecto, si el lector sugiriera una función /(x, y, z) 'al azar', seria sumamente difícil que no fueran idénticos los pares de derivadas mixtas fjf, i,*. Como una referencia, citamos el siguiente teorema que expresa las condiciones suficientes para que el orden de la derivación parcial sea indiferente.
T E O R E M A . Si todas las derivadas de segundo orden mixtas (/„, f„, etc.), de la función /(x, y, z) existen y son continuas en un punto dado, entonces, en ese punto.
fxy - />« fy. - ím U " / « • (4.2)
Funciones continuamente diferenciables. Se dice que la función /(x, y, z) es continuamente diferenciable en una región abierta 3t si existen y son continuas en cada punto de ¿9 sus derivadas parciales de primer orden /„ /, y fr
Funciones que no son continuamente diferenciables requieren tratamiento especial y no se estudiarán en este libro. Haciendo hincapié en esto, se lo recordaremos ocasionalmente al lector cuando se enuncien resultados importantes, pero de otra manera se dará por sentado sin comentarios que las funciones de las que se está tratando son apropiadamente definidas y continuamente diferenciables en alguna región abierta. Además, siempre y cuando se tenga la ocasión para introducir derivadas de segundo o más alto orden de una función, se dará por sentado que también existen y son continuas en cualquier región abierta que se considere.
La regbi de la cadena. Sea F una función cont inuamente d i l c r c m i a -ble de f, g y h y suponer que cada una de /, g, // es una (unción t o n -

96 Campos escalares y vectoriales
i .''lili
t inuamente d i ferenc iable de x , y y z. Entonces, se puede demostrar que F es u n a función compuesta, cont inuamente d i ferenciable de x , y y z y que
dF=dFdf dFdg dFdh dx df dx ' dg dx dh dx
dF = dFdf^ dFdg+dFdh ( 4 3 )
dy df dy dg dy dh dy
dF=dFd¿ dFdg dFdh
dz df dz dg dz dh dz
Ésta es l a regla para der i var u n a función de funciones, l l amada por lo
general regla de la cadena.
Para i lustrar este resultado, sea
F = f—4g + h, donde ' ! ' ! ' f i V - , u * M - W faiiib |f tm wip wns i > lírautgte b w m c i b «rónsTOfoY c n i i orno ) ,.^\ ,%x\ mtsúm
.*íüry¡ ítíbui ( a i l & h i e q Entonces, e sb rt echo M t t t M T
3F dFdf dFdg1 dFdh
di = ^ c b + c ^ c ^ + a Á " a í *> " »
= l x 3 x 2 * 4 - ( - 4 ) x 2 ( * - * ) + l x 0
Análogamente también se pueden eva luar ^fWf enipléSÍndo l a regla de la cadena, y s i r t e sc r ib i r ^exp l f c l éam^té como uña función de x ' 'y y z' ' • * D o i n u q • & » na «uno i moa no* ? ir»i
•%! t natno m a N q • j . i r í r m a i u p a i ttldiáaiianMb ttnamtumtino> no* ou aup Ot tO fM l r t
' 3 S ' ' ' * o l í l u : , ! ' 1 " 1 ! > * K '->ítW"«sfM>i«»;-»o «otna -n;bto'»-v ol M .oj/a na itn .i .w. « « ^ ¡ - A \ »yffifflB JgH}. A ^ a p ^ ^ w < " * > " W | M ' i « o b o l u t a i
m u v-iv.w^A-r. ton t i * * A ?.»\ «.*mu-»¿vi\ n i *vrn M & I « ' - v * * . ^ •,
*5í'̂ Vsi-\\vs; i-'v;.,<.\ Rotulo «i K t̂ra) M olm«m ? ^ w » u , ,%limal>r« .t»miv\»
verificar fjue / ±>f ' UWWlWM m» . V «Votxa l<VitV,>u,1 • <v V>iv^. . M A'. « . « -Vs * ¡ M M t»*
- 5. Si '
•;.<:•.:•• . títno) ^r2rf7\xc,fr\y2MraW) i l .' i hallar 9r/<3x, c)r/dy y 9r/3z.. Poi . tanto demostrar, que . . ¡ , R /

Definiciones de campos escalar y vectorial 97
excepto cuando r = 0.
Si u = ( ^ r n + f í r - n ) c o s « 0 ,
donde A, B y n son constantes, verificar que
dr2 + rór+r2d02 "
7. Sea u una función de x y y que satisface la ecuación diferencial
Si v = ue*¡, demostrar que
du d2U
dv = d2v
dx~ dy2'
8. La función n(x, í) satisface la ecuación
0*11 _ ¿ a 2 * •ax2 ~~ c 2 a i 2 '
donde c es una constante. Si las variables independientes se cambian por
| = X+Ct y r¡ = X—Ct,
demostrar que tru
dtcrr, = 0.
[Sugerencia. Demostrar primero que
du¡dx = du/d^+du/d-q
bujdt = cduldg-cdu/dr).]
4.3 Definiciones de campos escalar y vectorial
Cons ide ra r que u n escalar Q(x , y, z) está de f in ido sobre u n con junto de puntos S en el espacio de tres dimensiones; esto es, a cada punto P(x, y, z) en S le corresponde u n valor de Q(x, y, z). Entonces Q se l l ama junción escalar de posición o campo escalar. Igualmente, si u n vector F (x , y, z) está de f in ido sobre el con junto S, entonces F se l l ama

98 Campos escalares y vectoriales
función vectorial de posición o campo vectorial. E n l a práctica, el con j u n t o S casi s iempre constituye u n a región, como se definió en la sección 4.1, y po r tanto, en lo sucesivo restr ingiremos nuestra atención a este caso. Puesto que e l p u n t o P(x, y, z) está completamente especificado por su vector de posición r = (x, y, z) c on respecto a l or igen, l a notación*
Q = Q(r), F = F ( r ) (4,1,
también se puede emplear para ind i ca r que Q y F son funciones de posición.
Ejemplos sencillos de campos escalares son los siguientes:
Q = x2+y2 + z2 (4.5)
y
Q = \¡x. (4.6)
E jemplos de campos vectoriales son
F = xi+yj + zk (4-7) y
F = ( l - * 2 - - y ; 2 _ ~ 2 ) » ( Í 4 - j ) . (4.8)
E l campo escalar (4.5) y el campo vector ia l (4.7) están def inidos en todo e l espacio. E l campo escalar (4.6) está de f in ido en todos los puntos excepto en aquel los que están sobre e l p lano x = 0; y e l campo vector ia l (4.8) está de f in ido solamente en los puntos que están dentro o sobre la esfera.
x2+y2 + z2 = 1.
Campos escalares y vectoriales aparecen natura lmente en gran variedad de situaciones físicas. Po r ejemplo, cuando u n gas f luye a lo largo de u n tubo, cua lqu i e r pun to dentro de éste está asociado con la presión p, la densidad p, y la ve loc idad v : po r tanto p y p son campos escalares y v u n campo vector ia l asociado con e l mov imien to .
4.4 G r a d i e n t e d e u n c a m p o e s ca l a r
Si el campo escalar Q(x, y, z) está de f in ido y es cont inuamente dife-renciable en a lguna región abier ta entonces el gradiente de Q se def ine como
El gradiente de Q es un carnpo vectorial en 0t.

Gradiente de un campo escalar 99
Demostración. E n cada p u n t o de 8$y el g rad Q c laramente satisface la condición (a) de la definición de vector, que se d i o en la sección 2.2. Para comple tar l a prueba se debe demostrar a) que las componentes son invar iantes en una traslación de los ejes coordenados, y b) que las componentes se t ransforman de acuerdo a la ley vector ia l [ver las ecuaciones (2.1)] en una rotación de los ejes.
« ) Cons ide ra r una traslación a ejes coordenados nuevos O'XYZ, ta l que las coordenadas (X, Y, Z) estén relacionadas a las coordenadas or i ginales (x, y, z) po r las ecuaciones
x = X+a, y = Y+b, z = Z+c, (4.10)
donde a, b y c son constantes. P o r la regla de l a cadena [ecuación
(4-3)],
dx~ dXdx + dXdy + dXdz ~ dx'
Análogamente
dQ _ dQ dQ dQ dY~ dy' dZ~ dz'
Por tanto, las componentes de grad Q son invar iantes en u n a traslación de los ejes coordenados.
b) Cons ide ra r u n a rotación de los ejes, de f in ida por las ecuaciones (1.19), a saber,
x = l n x ' + l2iy'+l3iz',
y = liix' + hiy' + ln*', (4.11)
A l emplear la regla de la cadena,
dQ dx'
Análogamente
dQ dy'
y
dQ dz'
dx_dQ dy_dQ d£dQ dx' dx dx' dy dx' dz
. dQ dQ dQ
, dQ dQ dQ 2Xdx+l22dy~+l23dz'i
dQ dQ dQ te+h2ty+l33dz~-

100 Campos escalares y vectoriales
Estas ecuaciones demuestran que en u n a rotación de ejes, las componentes de grad Q se transforman como componentes de u n vector [ver las ecuaciones (2.1)], y p o r tanto l a verificación de que grad Q es u n vector está completa.
Observación. L a sola existencia de las derivadas parciales de p r imer o rden Qx, Qv y Qz n o es suficiente para asegurar que grad Q es u n campo vector ia l , ya que l a regla de l a cadena se debe emplear durante e l transcurso de l a demostración, y ésta exige u n a condición mucho más eficaz en Q. Se considera que Q es cont inuamente d i ferenciable , l o cua l [ junto con la c o n t i n u a pos ib i l i dad de derivación de x, y y z como funciones de las nuevas variables, que es e l caso cuando es usan las ecuaciones (4.10) y (4.11)] es ciertamente suficiente.
E J E M P L O 4. Hallar el grad Q cuando
a) Q = x2+xy+y2,
b) Q = r, donde r representa la distancia desde el origen
Solución, a) Se tiene
8Q _ dQ . dQ n
Tx=2x+y, Ty=*+2y, ^ = 0.
De ahí que, por la definición (4.9),
gradí? = (2x+y ) i4 - (x - r2y ) j . b) Se tiene
Por tanto ^ = X2+y2 + z2.
resultando
Análogamente
Así
dr x
dx r
dr _ y dr z dy r ~Y dz~ r
i x . y. z. gradr = - i + ^ i - f - - k
r r r
= (xi + yj + *k)/r
= r/r = r, (4-12)
el vector unitario radial.

Propiedades del gradiente 101
EJERCIC IOS
\ 9. Si Q = xy2z3-x2y2z,
hallar grad Q en el punto (1, —1, 1).
> 10. Si : Q = x"+y" + Z « t ¿ r \
demostrar que r • grad £2 = nfí.
" / 11. Demostrar que grad r» =nr«—2 r .
12. Si a es un campo vectorial constante (es decir, un campo vectorial de magnitud y dirección constantes) y r es el vector de posición, demostrar que
grad (a.r) = a.
4.5 Propiedades del gradiente
La derivada direccional ^Q/^n. Sea P u n p u n t o fijo y P/ o t ro p u n t o —>
que varía de ta l manera que el vector PP/ s iempre es para le lo a u n vector un i t a r i o fijo> ñ. Suponer que u n campo escalar Q toma valores Q{P) y Q{P) en P y Pr respectivamente. La derivada de Q en P en la dirección de n se define como
d Q - l i m Q(P')-n(P) (4.13)
s iempre y cuando exista e l límite. Es c laro que, en general, Q variará con di ferente rapidez conforme nos movemos alejándonos de P en d i recciones diferentes; l a der i vada d i recc ional c j Q / ^ n mide l a rap idez de variación en la dirección de ñ.
Se tiene ahora la siguiente prop iedad impor tante de grad Q :
n.gradí? = ^ . ( 4 1 4 )
L a demostración es muy senci l la . E l eg i r ejes Oxyz tales que co inc idan las direcciones de los vectores un i tar ios i y ñ. Entonces
ñ.grudü = i .gradí2 = ~
la cual es la rapidez de cambio de Q en l a dirección x, es decir, la d i rección de n.
Interpretación geométrica de grad Q. S i 6 representa el ángulo entre el vector g rad Q y el vector un i t a r i o ñ, entonces

102 Campos escalares y vectoriales
•x- = ñ.gradí3 = Igradí2| cos0. (4.15) en
Suponer que 8 varía, y considerar u n pun to donde grad Q z£ 0. E n este pun to (4.15) demuestra que el va lor máximo de ^ Q / ^ n ocurrirá cuando 6 = 0; es decir, cuando ñ y g rad Q t ienen la m i sma dirección. Se deduce que, en un punto donde grad Q ^ 0, el vector grad Q apunta en la misma dirección en la que Q se incrementa más rápidamente y \grad Q| es la rapidez de cambio de Q en esta dirección. El gradiente de un campo escalar, por tanto, describe completamente la manera en que varia el campo.
U n p u n t o donde grad Q = 0 se l l ama pun to estacionario. Superficies de nivel. Cons iderar la ecuación
Q(x,y,z) = A, (4.16)
donde X es u n parámetro. Para cada va lo r fijo de X la ecuación representa una superficie, y si X toma una var iedad de valores diferentes se obt iene u n a fami l i a de superficies.
Po r ejemplo, para cua lqu i e r valor posi t ivo fijo de X, la ecuación
x2+y2 + z2 = A (4.17)
A (g rad í? ) p
Fie. 35. E l vector (grad £l)p es normal a la superficie de nivel tic Q que pasa por P.
representa u n a esfera con centro en e l or igen y cuyo rad io es -v/X. S i X varía, la ecuación representa u n a fami l i a de esferas concéntricas.

Propiedades del gradiente 103
L a f am i l i a de superficies (4.16) se l l ama isosuperficies o superficies de nivel de Q. Sobre cada superf ic ie de n i ve l , Q es constante. U n ejemplo par t i cu la r de u n conjunto de superficies de n ive l son las superficies de presión atmosférica constante. Sus intersecciones con l a superf ic ie de la T i e r r a se muestran sobre mapas de t iempo (y usualmente se denomi nan isóbaras, es decir, rectas de presión barométrica constante).
U n a relación impor tante entre e l gradiente de u n campo escalar, y las superficies de n ive l de l campo es l a siguiente. Sea P u n pun to sobre la superf ic ie de n i ve l
Q(x,y,z) = c, (4.18)
donde c es u n a constante. Suponer que r€\ y í f 2 s o n dos curvas que
pasan p o r P las cuales están sobre la superf ic ie, y que T j y T 2 son sus tangentes uni tar ias en P. Suponer que grad Q no se anu la en P, y representar su va lor en este pun to por (grad Q)P. Entonces e l vector (grad Q)¡, está d i r i g i do en la dirección de la n o r m a l a la superf ic ie en P (Fig. 35).
Demostración. Si la ecuación intrínseca de r € x es
r = r(s) = (x(s),y(s),z(s)). (4.19)
Puesto que l a curva está sobre l a superficie (4.18), las coordenadas de cua lqu i e r p u n t o sobre la curva deben satisfacer (4.18), y por tanto
Ü(x(s),y(s)tz(s)) = c.
Der i vando estas ecuaciones con respecto a s, y usando l a regla de la cadena, se t iene
dQdx dQdy dQdz _ Jxd¡ + 'dy~ds + dzJs ~ °- (4.20)
Luego . „ (dQ dQ dQ\
y l a tangente u n i t a r i a a l a curva (4.19) es
( dx dy dz\ ds~'ds~'d~s)'
Por tanto (4.20) se reduce a
f .gradí2 = 0,
y de ahí que, en P,

104 Campos escalares y vectoriales
f , . ( g rad í2 ) P = 0.
Puesto que (grad fí)P ^ 0, e l vector u n i t a r i o Tx y el vector (grad Q)P
son perpendiculares . También, rep i t i endo e l a rgumento anter io r (grad Q)P es perpend icu lar a l a tangente u n i t a r i a T 2 a 9%. Luego las tangentes un i tar ias a x y ^ 2 también son tangentes a la superf ic ie (puesto que las curvas están sobre la superficie). P o r tanto, puesto que e l vector (grad Q)P es pe rpend icu la r a estas tangentes uni tar ias , está d i r i g i d o en l a dirección de la n o r m a l a l a superficie.
EJEMPLO 5. Si
Q(x,y,z) = x2+y2+z2 = a2.
Entonces
grad ¿2 = (2x,2y,2~).
Por tanto, el vector
(2*o, 2yo, 2* 0)
es normal a la superficie de nivel que pasa por el punto P{xQ, y 0 , z0). La referencia a la Fig. 36, y la observación de que
(xo,yo,Zo) = op confirman esta conclusión.
Desarrollo de Taylor. S i P(x, y, z) y Q(x + bx, y + by, z + dz) son puntos vecinos en u n a región abier ta expresar
PQ = o r = (8x,8y,8z). (4.21)
Si el campo escalar Q(x, y, z) es cont inuamente d i ferenciable en 31, se puede demostrar (ver por e jemplo las referencias dadas en la Sec. 4.2) que
Q(x + 8xty + 8y,z + 8z) = Q(xty,z) + 8x3^ + 8y^ + 8z^+e\8r\,
donde e - » 0 conforme |5r| - » 0, y Qfí/^x, ^ Q / ^ y y 3 Q / 3 z son evaluadas en P(x, y, z). L a notación in t roduc ida en esta sección nos permite expresar esto en una forma más concisa, a saber,
QQ = QP + Sr.{grzdQ)P + e\8r\, (4.22)
donde los índices P y Q i n d i c a n que l a cant idad deseada es eva luada en P y Q respectivamente.
Se puede dar u n a expresión explícita para E si se supone que todas las derivadas de segundo o rden de Q existen y son cont inuas; entonces la

Propiedades del gradiente 105
Fie. 36.
expresión para QQ es e l desarrol lo de T a y l o r de Q para términos de
segundo orden. S i n embargo, en muchos casos es suf ic iente saber que
e—> 0 conforme |5r| —> 0.
Se puede notar que, para u n a aproximación de p r ime r o rden (4.22),
i m p l i c a que la d i ferenc ia hQ en los valores de Q en P y Q está dada
por la fórmula
Q Q - Q P = 8Q « 8r.(g™dQ)P. (4.23)
EJERCICIOS
13. Sean ax y a2 constantes, y Q t , Q. ( campos escalares continuamente diferenciales. Demostrar por la definición de gradiente que
grad(aíQl + alQ2) = aígrzdQi + a2gradQ2.
[Observe bien. Ésta es una propiedad importante de grad, demostrando que es un opt-rador lineal — ver Sec. 4.7.]
*^|I4. Hallar la derivada del campo escalar Q = x2yz + 4xz2 en la dirección del veetor (2. —1, —1) en el puuto'P(l, —2, —2). [Sugerencia. Escribir al principio el vector unitario n que tiene la misma dirección que el vector dado, y evaluar ngradf í en el punto P.] ¡
^ 05) Con respecto a los ejes Oxyz, la temperatura en un cierto medio está dada por

106 Campos escalares y vectoriales
donde a, b, c y T (> 0) son constantes. En el origen O, hallar la dirección en que la temperatura cambia más rápidamente.
16. Hallar las razones de dirección de la normal al elipsoide
X2la2+y2lb2 + z2lc2 = constante,
en cualquier punto; donde a, b y c son constantes.
4.6 L a divergencia y rotacional de un campo vectorial
Suponer que las componentes de l campo vector ia l F = ( F „ F2, F3) son funciones cont inuamente di ferenciables de las coordenadas x , y y z. Entonces la divergencia de l campo vector ia l se define como
• • dFt dF-y dF-i d l v F - á * + V + T * 2 ; < 4 2 4>
y el rotacional de l campo vector ia l , como
_ ¡3F3 dF2\. IdF, dF3\. idF2 dFÁt , . O E ,
fórmula para el rot F también se puede expresar convenientemente en la forma de te rminanta l simbólica
rot F =
i j k
a a -a
dx dy dz
Fx F2 F2
(4.26)
Es claro que div F es un campo escalar; también tiene la propiedad fundamental que es invariante en una traslación o rotación de los ejes coordenados. P o r o t ra parte, rol F es un campo vectorial, según l a notación empleada por ant ic ipado . L o estudiado en e l capítulo 2 permite demostrar fácilmente estos enunciados, pero es conveniente d i f e r i r las demostraciones hasta que en la próxima sección se in t roduzca l a notación de operador.
Se demostró en la sección 4.5 que la interpretación geométrica de grad Q s igni f ica que mide la variación de l campo escalar Q. L a divergencia y rotac ional de u n campo vector ia l no se pueden interpretar en tales términos tan sencil los, y la discusión de l s igni f icado de estos conceptos se dejará para u n a etapa posterior (capítulo 6). S i n embargo, podemos notar que la divergencia y ro tac iona l desempeñan u n papel impor tante en varias ramas de las matemáticas apl icadas; e jemplo, h i drodinámica, e last ic idad y electromagnetismo.

IAI divergencia y rotacional de un campo vectorial 107
EMPLO 6. Hallar la divergencia de los siguientes campos vectoriales:
Uución
r (4.24),
a) F = (x2, 3y, *•<), b) F = r, donde r es el vector de posición.
d ¡ v F = % ¿ ) + m + ^ ) dx dy
= 2*4-3 .
dz
Puesto que r = (x, y, z),
d i v r = 3.
E J E M P L O 7. Hallar el rot F para el campo vectorial
F = (z,x,y),
demostrar que rot rot F = 0-Solución. Se tiene
rot F =
i k
d d d dx dy dz
z X y
(4.27)
= ( l - 0 ) i + ( l - 0 ) j + ( l - 0 ) k
= i+j + k
= (1,1,1).
También
i j k
d d a dx dy dz
i 1 i
rot rot F =
= 0.
E J E R C I C I O S
17. Si a, y a.¿ son constantes y F , , F 2 son campos vectoriales continuamente di-nciablcs. demostrar por la definición de divergencia y rotacional que
d i v ( a 1 F 1 + rt2F2) = flidivF, + a 2 d i v F 2 ,

108 Campos escalares y vectoriales
rot (a1 Fj + a2 ¥2) = a1 rot F , + a 2 rol F 2 .
[Observe bien. Éstas son propiedades importantes, e ilustran que, lo mismo que grad (ver pág. 106), div y rot son operadores lineales (ver Scc. 4.7, que sigue).]
18. Hallar la divergencia v rot del campo vectorial F = (xy, yr, 0) con el punto (1, 1, 1). También evaluar grad (divF)-
— S i Q = x + y= -f- z3, hallar div (grad Q) y rot (grad Q).
20. Si a es un campo vectorial constante y r es el vector de posición, demostrar que
rot (a x r) = 2a.
— i 21. El punto A(a, c) está fijo, y l\x, y, z) es un punto vaiiahlc. Demostrar qiu
dWAP = 3, rot AP = 0.
22. En todos los puntos, un campo vectorial F es paralelo al plano xy. Si las componentes de F son solamente funciones de x y y, demostrar que rot rot F es paralelo al plano xy.
4.7 E l operador-del
E l lector puede estar fami l iar i zado con el concepto de operadores en relación con ecuaciones di ferenciales ord inar ias . P o r tanto, l a ecuación d i ferenc ia l
\i.
dx2 ' " dx
se escribe algunas veces en la forma
y expresada como
(D2 + 2D + 3)y = 0,
donde D = djdx. E n este ejemplo, D es u n operador. C u a n d o actúa sobre la función y(x) resulta la der i vada dy/dx; y cuando D2 actúa sobre y(x) resulta la segunda der ivada d2y¡dx2.
E l operador D obedece algunas, pero no todas, de las reglas de l álgebra o rd ina r i a . Po r e jemplo
y
D(Dy) = D2y

El operador-del 109
(D2 + 2D + 3)y = D2y + 2Dy + 3y;
o
D(xy) ^ xDy # xyD.
T e n i e n d o en cuenta estas ideas, volvemos ahora a operadores en aná-is vector ia l . El operador-del. L a expresión.
l l a m a el operador-del, o, más brevemente, del o nabla. E n u n a traslación o rotación de los ejes, las componentes 3 / 3 x , 9/3 ) ' 3 / 3 z de l operador nab la se t rans forman como lo hacen las compo-
entes de u n vector [esto exp l i ca la notación empleada en (4.28)]. L a emostración de esto se puede obtener inmed ia tamente por la demos-
ción hecha en l a sección 4.4, de que grad Q es u n campo vector ia l , efecto, si en las partes (a) y (b) de la demostración, se supr ime Q
cada línea, se obt iene
nto con expresiones análogas para 3 / 3 / y 3 / 3 z ' . E n este sentido, el perador-del se compor ta como u n vector, y a menudo se l l ama opera-or vector ia l , L a s ideas asociadas con el operador D, discutidas anter ior-ente, se pueden extender ahora a l operador-del . Se def ine
(4.28)
dX~ dx' dY~dy' dZ~'dz;
VQ = g r a d D . (4.29)
1 m i embro i zqu ie rdo es
es na tura l interpretar esto como
grad Q.
amb i cn es na tura l de f in i r
V . F = d i v F (4.30)

110 Campos escalares y vectoriales
V x F = rot F . (4.31)
Porque , al desarro l lar el producto escalar formalmente.
dx dy dz
= d i v F ;
y de i gua l manera se t iene
i j k
3x 3y 3#
F , F 2 F3
= rot F .
Observar que las componentes de V actúan solamente sobre funciones a su derecha, de i gua l m o d o que con el operador D.
Estamos ahora en l a posición de demostrar dos resultados sobrantes de l a sección anter ior , a saber:
a) /*,'/ campo escalar d i v F es invariante en una traslación o rotación de los ejes coordenados;
b) rot F es un campo vectorial.
Demostraciones, a) A l escr ibir
d i v F = V . F ,
se obt iene fácilmente la inva r i anc ia en u n a traslación de los ejes. Puesto que, como se h a visto, las componentes de V son invar iantes en una traslación de los ejes, y puesto que las componentes de l vector F son también invar iantes en tal transformación, V . F es invar iante .
Para demostrar l a inva r i anc ia de V . F en u n a rotación de los ejes, es conveniente representar las coordenadas por x „ x 2 , x 3 en lugar de x, y y z. C o n esta notación

El operador-del 111
dx\ dx2 dx3 dx¡
por la convención de suma. Cons ide ra r la rotación a ejes nuevos Ox\x\x'z d e f i n ida po r las ecua
ciones (1.25). A l emplear pr imas para representar componentes con respecto a los
ejes nuevos, l a ley de transformación vector ia l [ecuación (2.2)] resulta
dx) 1% dx¡
F; = iIKFK.
P o r tanto, ya que los coeficientes ljlc son independientes de xít x2 y x 3 ,
EL - i i dlh dx¡ j i i k d x ¡ '
P o r las condic iones de o r t ono rma l i dad
(ecuación (1.29)), se deduce que
dx) lk dx¡ dx{' es dec i r
<W+wí+w¡ = dll+Ej+
dll. dx[ dx'2 dx3 dx\ dx2 dx3
E l m i embro i zquierdo es la d i v F refer ida a los ejes nuevos, y e l m iembro derecho es la d i v F refer ida a los ejes or ig inales; y po r tanto, l a inva r i anc ia de d i v F en u n a rotación de los ejes queda demostrada.
b) S i e l lector ve la sección 2.6 pág. 48, observará que la demostración de l a i nva r i anc i a de V . F es semejante a la demostración de que el p roduc to escalar a . b es u n invar iante escalar. Análogamente, la demostración de que V x F es u n campo vector ia l semejante a la demostración hecha en la sección 2.7 pág. 52, referente a que el producto vector ia l a X b es u n vector. Los rasgos esenciales son análogos porque e l operad o r V se t ransforma en vector en u n a traslación o rotación de los ejes. E l ver i f icar lo , se deja como ejercicio para e l lector.
Se ha observado ya, en e l ejercicio 13, pág. 105 y ejercicio 17, pág. 107, que grad , d i v y rot son operadores l ineales; y podemos ahora expresar

112 Campos escalares y vectoriales
concisamente lo mismo enunc iado solamente que nab la es u n operador l inea l .
E l operador d i ferenc ia l D==d/áx, a l que ya nos hemos refer ido, posee la p rop i edad característica de l i n ea l i dad :
D{axyi + a2y2) = axDy{+a2I)y2
para cualesquiera constantes a x y a 2 ; y de l a m i s m a manera , e l operador d i f e renc ia l pa rc i a l "d/c)x s e puede dec i r que es l i n ea l , puesto que
para cualesquiera funciones f „ /2 que se puedan der i var parc ia lmente con respecto a x, y cualesquiera constantes av y a2.
Luego
V = i — k — ~~ 1 dx ^ dy dz
es u n a combinación l inea l de tales operadores diferenciales parciales, y por tanto se puede esperar que también se comporta como u n operador l inea l . C o m o e l lector puede fácilmente verif icar, V verdaderamente se compor ta de esta manera en tres de sus posibles apl icaciones: V Q, V *F, y V. x F . Esto es exactamente lo que se afirmó en los ejercicios 13 y 17.
E J E R C I O O S
—^jfSük Expresar con notación de operador: a) grad (div F). b) div(gradQ), c) div not F). '!) rol (grad <>) v e) rol rot F
—y 24. Demostrar que (F x JJ) x C es un campo vectorial. [Sugerencia. Observar que las componentes de V se transforman igual que las componentes de un campo vectorial; y que a x b es un vector.]
4.8 Operadores invariantes escalares
Si Q> representa u n operador d i ferencia l parc ia l l i nea l que contiene solamente las coordenadas cartesianas rectangulares x , y y z como variables independientes. Po r ejemplo, se podría tener
$ - á. i 2 — dx dy dz
dx2 dy dy dz

Operadores invariantes escalares 113
E l operador 2l se l l ama operador invariante escalar si su forma no camb ia en u n a traslación o rotación de los ejes coordenados. E l s iguiente resultado referente a tales operadores será el requer ido .
Sea Q> u n operador inva r i ab l e escalar, y d e f i n i r su operación sobre u n campo vector ia l F po r
®F = ®(FUF2,F3) = (9FU9F2,9F3). (4.32)
Entonces es u n campo vector ial . Demostración. E n u n a traslación de los ejes, las componentes de i ^ F
no camb ian , porque tanto 2 c omo las componentes de F no camb ian . E n u n a rotación a ejes nuevos Ox'y'z', cuyas posiciones con respecto
a los ejes or ig inales Oxyz están def in idas por la mat r i z de transformación (1-12), se tiene
nde, usualmente, las pr imas representan componentes con respecto a los ejes nuevos. Po r tanto, a l emplear la prop iedad de inva r i anc ia de la forma de Ql, y también la l i nea l i dad d e ¿ ^ ,
®'F¡ = ®{ljkFk) - ljk9Fk,
' o que demuestra que las componentes de £¿>F se t ransforman de acuerdo a la ley vector ia l en una rotación de los ejes, se deduce qtie Q>F es u n campo vector ia l .
El operador laplaciano V - . E l más impor tan te de los operadores invar iantes escalares es el laplaciano, de f in ido como
" dx2+dy2 + dz2
(4.33)
l ternat ivamente, a l emplear coordenadas rectangulares x , , x.¿, x : i y la convención de suma,
V 2 = d2 d2 a2 d d dx2 dx\ dx\ dx¡dxi (4.34)
Formalmente , el operador lap lac iano es el ' cuadrado ' de l operador-del . Esta relación se ent iende fácilmente a l observar que, formalmente,
\dx' ©y dz)'\dx' ay a*/ dx2 ay^ Ü dz2
Por analogía con la relación a . a = a2, es na tu ra l , por tanto, emplear la notación V . V = V 2 -