Embed Size (px)
Citation preview

การจดการเรยนรฟสกสแบบเลโกเพอพฒนาแนวคดเรองแรงและการเคลอนท
พชตพล เพงพศ
วทยานพนธนเปนสวนหนงของการศกษาตามหลกสตรปรญญาวทยาศาสตรมหาบณฑต สาขาวทยาศาสตรศกษา คณะวทยาศาสตร
มหาวทยาลยอบลราชธาน ปการศกษา 2559
ลขสทธเปนของมหาวทยาลยอบลราชธาน
DEVELOPMENT OF STUDENTS’ CONCEPTS OF FORCE AND
MOTION BY LEGO-BASED PHYSICS INSTRUCTION
PICHITPON PENGPIT
A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE
MAJOR IN SCIENCE EDUCATION UBONRATCHATHANI UNIVERSITY
ACADEMIC YEAR 2016 COPYRIGHT OF UBONRATCHATHANI UNIVERSITY
ใบรบรองวทยานพนธ มหาวทยาลยอบลราชธาน
ปรญญาวทยาศาสตรมหาบณฑต สาขาวชาวทยาศาสตรศกษา คณะวทยาศาสตร
เรอง การจดการเรยนรฟสกสแบบเลโกเพอพฒนาแนวคดเรองแรงและการเคลอนท ผวจย นายพชตพล เพงพศ คณะกรรมการสอบ
ดร.จนตวฒน ตนอมาตยรตน ประธานกรรมการ ผชวยศาสตราจารย ดร.สระ วฒพรหม กรรมการ ผชวยศาสตราจารย ดร.กานตตะรตน วฒเสลา กรรมการ
อาจารยทปรกษา …………………..............………..………….………..……...................... (ผชวยศาสตราจารย ดร.สระ วฒพรหม)
……………………………….…........................................... ……………………………….….................................. (รองศาสตราจารย ดร.อทศ อนทรประสทธ) (รองศาสตราจารย ดร.อรยาภรณ พงษรตน) คณบดคณะวทยาศาสตร รองอธการบดฝายวชาการ
ลขสทธเปนของมหาวทยาลยอบลราชธาน ปการศกษา 2559
ก
กตตกรรมประกาศ
วทยานพนธนเสรจสมบรณเปนอยางดได ดวยความกรณาของผชวยศาสตราจารย ดร.สระ วฒพรหม ซงไดใหค าปรกษา พจารณาตรวจแกไขขอบกพรองตางๆ และตดตามการท าวทยานพนธครงนดวยดเสมอมา ผวจยรสกซาบซงในความกรณาของทานเปนอยางยง จงขอขอบพระคณเปนอยางสงไว ณ โอกาสน
ขอขอบพระคณ ดร.จนตวฒน ตนอมาตยรตน ผชวยศาสตราจารย ดร.กานตตะรตน วฒเสลา ทใหความกรณาเปนคณะกรรมการสอบวทยานพนธ ขอขอบพระคณบณฑตวทยาลย มหาวทยาลยอบลราชธาน และสถาบนสงเสรมการสอนวทยาศาสตรและเทคโนโลย (สสวท .) ทสนบสนนทนวจย ขอขอบพระคณคณาจารยประจ าหลกสตรวทยาศาสตรมหาบณฑต คณะวทยาศาสตร มหาวทยาลยอบลราชธานทกทาน ทกรณาประสทธประสาทความรและประสบการณ อนมคาย งแกศษยขอขอบพระคณ ผอ านวยการ คร บคลากร โรงเรยนประสาทวทยาคาร ทเลงเหนคณคาของการศกษาและงานวจย ใหความเออเฟอและอ านวยความสะดวกในการเกบรวบรวมขอมลในการด าเนนการวจยครงน ขอขอบพระคณนกเรยนมธยมศกษาปท 4/5 แผนการเรยนวทยาศาสตร-คณตศาสตร ภาคเรยนท 2 ปการศกษา 2558 โรงเรยนประสาทวทยาคาร ทเปนกลมตวอยางและใหความรวมมอในการวจยครงน ขอขอบพระคณ กลม PENThai มหาวทยาลยมหดล ทไดอนเคราะหแบบประเมนความเขาใจ FMCE (ฉบบภาษาไทย)
สดทายผลอนจะเปนประโยชน ความดงามทงปวงทเกดจากการศกษาวทยานพนธน ขอมอบแด คณพอและคณแมทเคารพยง
พชตพล เพงพศ ผวจย
ข
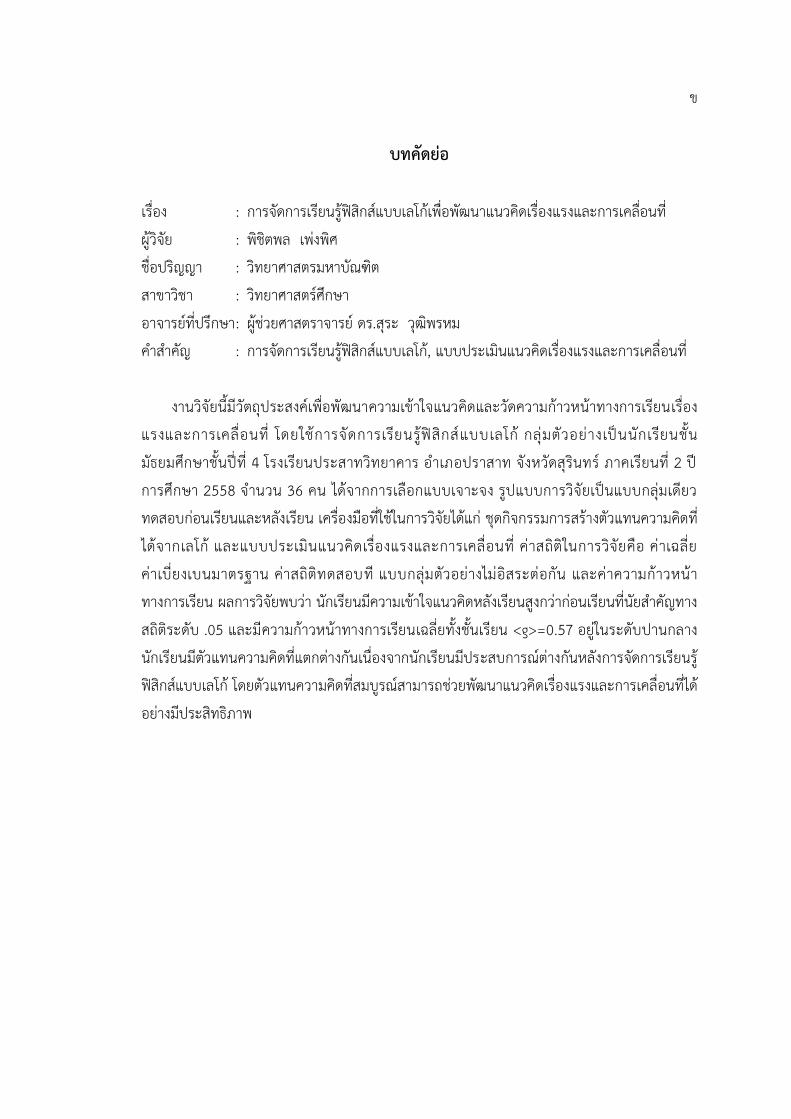
บทคดยอ เรอง : การจดการเรยนรฟสกสแบบเลโกเพอพฒนาแนวคดเรองแรงและการเคลอนท ผวจย : พชตพล เพงพศ ชอปรญญา : วทยาศาสตรมหาบณฑต สาขาวชา : วทยาศาสตรศกษา อาจารยทปรกษา : ผชวยศาสตราจารย ดร.สระ วฒพรหม ค าส าคญ : การจดการเรยนรฟสกสแบบเลโก, แบบประเมนแนวคดเรองแรงและการเคลอนท
งานวจยนมวตถประสงคเพอพฒนาความเขาใจแนวคดและวดความกาวหนาทางการเรยนเรองแรงและการเคลอนท โดยใชการจดการเรยนรฟสกสแบบเลโก กลมตวอยางเปนนกเรยนชนมธยมศกษาชนปท 4 โรงเรยนประสาทวทยาคาร อ าเภอปราสาท จงหวดสรนทร ภาคเรยนท 2 ปการศกษา 2558 จ านวน 36 คน ไดจากการเลอกแบบเจาะจง รปแบบการวจยเปนแบบกลมเดยวทดสอบกอนเรยนและหลงเรยน เครองมอทใชในการวจยไดแก ชดกจกรรมการสรางตวแทนความคดทไดจากเลโก และแบบประเมนแนวคดเรองแรงและการเคลอนท คาสถตในการวจยคอ คาเฉลย คาเบยงเบนมาตรฐาน คาสถตทดสอบท แบบกลมตวอยางไมอสระตอกน และคาความกาวหนาทางการเรยน ผลการวจยพบวา นกเรยนมความเขาใจแนวคดหลงเรยนสงกวากอนเรยนทนยส าคญทางสถตระดบ .05 และมความกาวหนาทางการเรยนเฉลยทงชนเรยน <g>=0.57 อยในระดบปานกลาง นกเรยนมตวแทนความคดทแตกตางกนเนองจากนกเรยนมประสบการณตางกนหลงการจดการเรยนรฟสกสแบบเลโก โดยตวแทนความคดทสมบรณสามารถชวยพฒนาแนวคดเรองแรงและการเคลอนทไดอยางมประสทธภาพ
ค
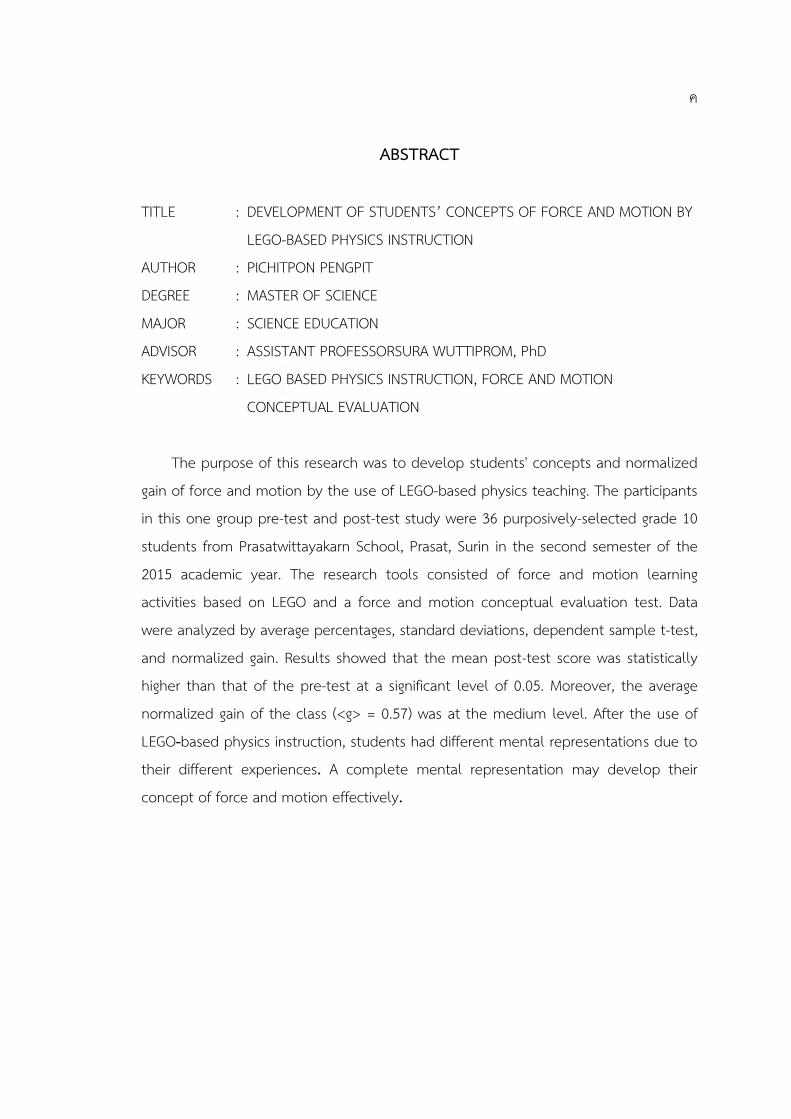
ABSTRACT TITLE : DEVELOPMENT OF STUDENTS’ CONCEPTS OF FORCE AND MOTION BY LEGO-BASED PHYSICS INSTRUCTION AUTHOR : PICHITPON PENGPIT DEGREE : MASTER OF SCIENCE MAJOR : SCIENCE EDUCATION ADVISOR : ASSISTANT PROFESSORSURA WUTTIPROM, PhD KEYWORDS : LEGO BASED PHYSICS INSTRUCTION, FORCE AND MOTION CONCEPTUAL EVALUATION
The purpose of this research was to develop students' concepts and normalized gain of force and motion by the use of LEGO-based physics teaching. The participants in this one group pre-test and post-test study were 36 purposively-selected grade 10 students from Prasatwittayakarn School, Prasat, Surin in the second semester of the 2015 academic year. The research tools consisted of force and motion learning activities based on LEGO and a force and motion conceptual evaluation test. Data were analyzed by average percentages, standard deviations, dependent sample t-test, and normalized gain. Results showed that the mean post-test score was statistically higher than that of the pre-test at a significant level of 0.05. Moreover, the average normalized gain of the class (<g> = 0.57) was at the medium level. After the use of LEGO-based physics instruction, students had different mental representations due to their different experiences. A complete mental representation may develop their concept of force and motion effectively.

ง
สารบญ
หนา
กตตกรรมประกาศ ก บทคดยอภาษาไทย ข บทคดยอภาษาองกฤษ ค สารบญ ง สารบญตาราง ฉ สารบญภาพ ช บทท 1 บทน า
1.1 ความเปนมาและความส าคญของปญหา 1 1.2 วตถประสงคของการวจย 3 1.3 ขอบเขตของการวจย 3 1.4 ประโยชนทคาดวาจะไดรบ 4 1.5 นยามศพทเฉพาะ 4
บทท 2 เอกสารและงานวจยทเกยวของ 2.1 แนวคด (Concept) 6 2.2 ตวแทนความคด (Mental Representation) 7 2.3 วธการสอนแบบท านาย-สงเกต-อธบาย (Predict Observe Explain: POE) 9 2.4 แบบประเมนแนวคดเรองแรงและการเคลอนท (Force and Motion
Conceptual Evaluation: FMCE)
11 2.5 ความกาวหนาในการแกโจทยปญหา (Normalized gain) 12
บทท 3 วธการด าเนนงานวจย 3.1 การเลอกกลมตวอยางและแบบแผนการวจย 15 3.2 เครองมอวจย 16 3.3 การด าเนนการวจยและเกบขอมล 28 3.4 การวเคราะหขอมล 28

จ
สารบญ (ตอ)
หนา
บทท 4 ผลการวจยและการอภปรายผล 4.1 วเคราะหความเขาใจแนวคด 31 4.2 วเคราะหความกาวหนาทางการเรยน 32 4.3 วเคราะหตวแทนความคดของนกเรยน 38
บทท 5 สรปผลการวจย และขอเสนอแนะ 5.1 สรปผลการวจย 45 5.2 ขอเสนอแนะ 46
เอกสารอางอง 47 ภาคผนวก
ก ชดกจกรรมการสรางตวแทนความคดดวยเลโกเรอง “แรงและการเคลอนท” 52 ข แบบประเมนแนวคด FMCE (ฉบบภาษาไทย) 70 ค คะแนนนกเรยน 77 ง ตวอยางรปกจกรรม 82
ประวตผวจย 87
ฉ
สารบญตาราง
ตารางท หนา
3.1 กลมแนวคดค าถามจากแบบประเมนแนวคด FMCE 29 4.1 คาเฉลย (Mean) คาเบยงเบนมาตรฐาน (SD) คาสถตทดสอบท (t-test) และ
ระดบนยส าคญทางสถตในการทดสอบเปรยบเทยบคะแนนความเขาใจแบบประเมนแนวคด FMCE กอนเรยนและหลงเรยนของนกเรยน 36 คน
31 ค.1 คะแนนกอนเรยนและหลงเรยนของนกเรยนแตละคนทไดจากแบบประเมน
ความเขาใจ FMCE 33 ขอ
78 ค.2 คะแนนกอนเรยนและหลงเรยนของขอสอบ FMCE แตละขอของนกเรยน 36 คน 80 ค.3 รอยละกอนเรยนและหลงเรยนของขอสอบ FMCE แตละกลมค าถาม 81

ช
สารบญภาพ
ภาพท หนา
3.1 รถทดลอง 16 3.2 ปลอยลกบอลตกอยางอสระ (Ball Drop) โดยใชโปรแกรม Tracker 17 3.3 การหาเวกเตอรลพธโดยวธการวาดรปแบบหางตอหวซงเวกเตอรทงสองตงฉากกน 18 3.4 การหาเวกเตอรลพธโดยวธการวาดรปหางตอหวซงเวกเตอรทงสองไปทางเดยวกน 18 3.5 การหาเวกเตอรลพธโดยวธการวาดรปแบบหางตอหวซงเวกเตอรทงสองไปสวนทางกน 18 3.6 การกระจด ( s ) คงท 19 3.7 การกระจด ( s ) เพมขนอยางสม าเสมอ 19 3.8 การกระจด ( s ) เพมขนไมสม าเสมอ 20 3.9 ความเรว ( v ) คงท 20 3.10 ความเรว ( v ) เพมขนอยางสม าเสมอ 21 3.11 ความเรว ( v ) เพมขนไมสม าเสมอ 21 3.12 ความเรง ( a ) คงท 22 3.13 ความเรง ( a ) เพมขนสม าเสมอ 22 3.14 ความเรง ( a ) เพมขนไมสม าเสมอ 23 3.15 สถานการณท 3 รถก าลงเคลอนทไปดานขวา ใชกลองจบภาพรถทกๆ 1 วนาท 23 3.16 เลโกทใชสรางตวแทนความคด 24 3.17 เลโกความเรวของสถานการณท 4 24 3.18 ตวแทนความคดของความเรวฝนสถานการณท 4 25 3.19 เลโกความเรงของสถานการณท 4 25 3.20 ตวแทนความคดของความเรงในสถานการณท 4 25 3.21 ความสมพนธของการกระจด-เวลา ความเรว-เวลา และความเรง-เวลา ของ
สถานการณท 4
26 3.22 ตวอยางของของมหาวทยาลยโคโลราโด โบลเดอร (University of Colorado
Boulder)
27 4.1 ผลความกาวหนาทางการเรยนรายชนเรยน 33 4.2 ผลความกาวหนาทางการเรยนรายบคคล 34

ซ
สารบญภาพ (ตอ)
ภาพท หนา
4.3 ผลความกาวหนาทางการเรยนรายแนวคด 35 4.4 ผลความกาวหนาทางการเรยนรายขอ 36 4.5 ค าถามขอท 15 และ 21 ของแบบประเมนแนวคด FMCE 37 4.6 ผลการจดกลมและตรวจสอบความถกตองในการใชตวแทนความคดของแนวคด
A. Force Sled B. et al.
39 4.7 ตวอยางการเขยนตวแทนความคดของแนวคด Force Sled A. นกคนท 8 B.
นกเรยนคนท 11
40 4.8 ตวอยางการเขยนตวแทนความคดของแนวคด Force Graphs A. นกคนท 8 B.
นกเรยนคนท 11
42 ง.1 การจดการเรยนการสอนของคร 83 ง.2 นกเรยนสรางตวแทนความคดจากเลโก 84 ง.3 นกเรยนถายภาพตวแทนความคดจากเลโก 85 ง.4 นกเรยนท าแบบทดสอบ FMCE 86

1
บทท 1 บทน ำ
1.1 ควำมเปนมำและควำมส ำคญของปญหำ
ฟสกสเปนวทยาศาสตรแขนงหนงทมธรรมชาตของเนอหาเกยวของกบกฎและทฤษฏ ซงน ามาใชอธบายปรากฏการณตางๆ ทเกดขนในธรรมชาต การจดการเรยนรวชาฟสกสในชนเรยนสวนใหญเนนการทองต าราเรยนและท าแบบฝกหดมากกวาการสรางองคความรดวยตนเอง ลกษณะเฉพาะของวชาฟสกสเปนวชาทมความเชอมโยงตอเนอง ซบซอน และบางเนอหาเปนนามธรรมซงมกจะเปนปญหาในการเรยนจงท าใหนกเรยนสวนใหญคดวาฟสกสคลายกบคณตศาสตรเพราะสวนใหญจะใชสมการส าหรบการค านวณ แทนคาเพอใหไดค าตอบ (Adadan, E., Irving, K. E. and Trundle, K. C., 2009) นกเรยนไมสามารถน าหลกการทางฟสกสไปอธบายเหตการณทเกดขนในชวตประจ าวนได เชน การปลอยวตถใหตกอยางเสรลงสพน นกเรยนไมสามารอธบายไดวา มปรมาณทางฟสกสใดบางเกยวของกบการเคลอนท เมอใหนกเรยนเขยนกราฟระหวางการกระจดกบเวลา กราฟความเรวกบเวลา และกราฟความเรงกบเวลา นกเรยนไมสามารถเขยนหรออธบายความสมพนธทเปนนามธรรมไดถกตองตามแนวคดของนกวทยาศาสตร (รจกะ การสข, 2554) การจดการเรยนรวชาฟสกสควรเปดโอกาสใหนกเรยนสรางองคความรตามทฤษฎการเรยนรตามแนว Constructivism การสรางองคความรโดยเนนการเรยนทผ เรยนตองแสวงหาความรดวยตนเอง ซ งความรท ไดมาจะมาจากการสงเกตและประสบการณของผเรยน และผเรยนสรางความรจากประสบการณเดม การใชกจกรรมการเรยนรเพอพฒนากระบวนการคดอยางอสระของผเรยน ฝกใหผเรยนเปนผสรางความรมากกวาการรบความรและเรยนรจากการปฏบตของตนเองโดยอาศยประสบการณ การจดการเรยนการสอนตามทฤษฎการเรยนรตามแนว Constructivism นน ครมความจ าเปนทจะตองทราบความรเดมของนกเรยนและความเขาใจแนวความคด (Concept) ของนกเรยนในเนอหาทเรยนเรองนนๆ ซงวธการทจะเขาใจในสงนนอาจท าไดหลากหลายวธ เชน การทดสอบ การสอบถาม การสมภาษณ การทใหนกเรยนสอสารสงทพวกเขาคดออกมาในรปแบบตางๆ เชน การเขยนค าอธบาย การเขยนแผนภาพ การบรรยายดวยค าพด การแสดงทาทาง และการวาดภาพพรอมค าอธบายนน เปนสงทเรยกวา ตวแทนความคด (Mental Representation) (สงกรานต มลศรแกว, 2554) ของนกเรยน
การสรางตวแทนความคด (Mental Representation) เปนกระบวนการทนกเรยนสรางความเขาใจแนวคด เพออธบายความเขาใจของนกเรยนอาจใชภาษาในการบอกหรออธบายความหมายเบองตน เชน ส รปรางของวตถ แตถาอธบายสงตางๆ ทซบซอนขนบางครงอาจใชมากกวาภาษาทวๆ ไป

2
เชน แผนท ภาพประกอบ แผนภาพไดอะแกรม กราฟ แผนภมแทง และสมการทางคณตศาสตร ตวแทนความคดสวนมากทใชแกโจทยปญหาฟสกสยากๆ มกเขยนอธบายในรปของ free-body diagram ใหครบถวนและถกตองจะชวยใหหาค าตอบไดงายขน (Kohl et al., 2007) การคดเปนทกษะพนฐานของบคคล เนองจากเปนทกษะทตองน าไปใชตอยอดกบทกษะอนๆ ทมความซบซอนและยากขน นกเรยนควรไดรบการฝกฝนอยางตอเนอง ทกษะการคดตองอาศยความเขาใจ การอธบาย การขยายความ และการสรป (นชชา แดงงาม, 2557) การเปลยนแปลงความคดมพนฐานตามทฤษฎการเรยนรตามแนว Constructivism ซงเปนทฤษฎการเรยนรทอธบายถงกระบวนการเรยนรโดยผเรยนเปนผสรางองคความร หรอสรางประสบการณดวยตนเอง เชอวาการเรยนรเปนการพฒนาหรอเปลยนความคดทมอยแลวของนกเรยน โดยรปแบบการสอนหรอวธการสอนทมพนฐานตามทฤษฎการเรยนรตามแนว Constructivism ปจจบนมหลายรปแบบหลายวธ ซงวธการจดการเรยนรแบบ POE ซงเปนอกวธทนาสนใจเนองจากเปนวธการจดกจกรรมการเรยนการสอนตามทฤษฎการเรยนรตามแนว Constructivism ทสนบสนนใหนกเรยนไดตดสนใจเกยวกบความเขาใจทมอยบนพนฐานของความเชอเดม White and Gunstone (1992) ไดกลาวไววา วธการจดการเรยนรแบบ POE เปนวธการทมประสทธภาพทสงเสรมใหนกเรยนไดแสดงความคดเหนและอภปรายเกยวกบแนวคดวทยาศาสตร เปนการน าเสนอสถานการณและใหนกเรยนท านายวาจะเกดอะไรขนถามการเปลยนแปลง หลงจากนกเรยนท านายแลวกใหนกเรยนสงเกตสถานการณดงกลาว โดยนกเรยนตองลงมอทดลอง สงเกต หรอหาวธพสจนเพอหาค าตอบของสถานการณทครสรางขน หลงจากนนนกเรยนบอกสงทนกเรยนสงเกตไดดวยตนเอง และขนตอนสดทายเปนการอธบายถงความแตกตางสงทได (วนชา ประยรพนธ, 2554) จากการสงเกตหรอผลการทดลองทได
มงานวจยทแสดงถงการน าการจดการเรยนรโดยใชการจดการเรยนรแบบท านาย-สงเกต-อธบายมาใชในการเรยนการสอนวทยาศาสตรในรายวชาฟสกสเรองแรงและการเคลอนท เชน (Rakkapao et al., 2014) ไดจดการเรยนการสอนโดยอาศยวธ POE ทใชสอมลตมเดยเปนพนฐานรวมกบการบรรยายในหองเรยนขนาดใหญส าหรบนกศกษาคณะวทยาศาสตรเปรยบเทยบกบวธการสอนแบบบรรยายทมการตวโจทยควบคส าหรบนกศกษาคณะวศวกรรมศาสตร พบวา การจดการเรยนรดวยวธ POE กระตนใหผเรยนเกดการเรยนรเรองแรงและการเคลอนทมการตวโจทยควบค โดยหวขอความเรวเปนเรองทวธการสอนแบบ POE ชวยใหผเรยนเกดการเรยนรไดมากทสด การพฒนาความเขาใจเรองแรงและการเคลอนท (รจกะ การสข , 2554) ผวจยใชวธการจดการเรยนรแบบ POE สอนนกเรยนชนมธยมศกษาชนปท 4 โรงเรยนเบญจะมะมหาราช พบวา ความคาดหวงเพอขนเลกนอยดวยดชนประสทธผล 0.03 ผลของแบบทดสอบแนวคดเรองแรงและการเคลอนท (Force and Motion Conceptual Evaluation ; FMCE) นกเรยนมพฒนาการเพมขนอยในระดบกลาง โดยมคา เฉลยดชนประสทธผล เทากบ 0.39 คะแนนผลสมฤทธทางการเรยนเพมขนอยางมนยส าคญทางสถตทระดบ .05

3
จากขอมลดงกลาว การศกษาตวแทนความคดนนเปนประโยชนอยางยงตอครผสอน เนองจากครจะไดเขาใจในแนวความคดของนกเรยนเกยวกบเรองนนๆ อยางลกซง เมอครเขาใจในแนวคดของนกเรยนการจดการสอนแลวครกจะสามารถออกแบบกจกรรมการเรยนการสอนใหสอดคลองกบแนวคดของนกเรยนและท าใหนกเรยนสรางแนวคดใหมโดยอาศยความรจากประสบการณเดมและการมปฏสมพนธกบบคคลอนบนพนฐานตามทฤษฎการเรยนรตามแนว Constructivism ซงการจดการเรยนการเรยนรทกระตนใหนกเรยนเกดการเรยนเรยนรทไดรบการยอมรบอยางแพรหลายโดยใชวธการจดการเรยนรแบบ POE ผวจยเปนผสอนวชาฟสกสระดบชนมธยมศกษาปท 4 โรงเรยนประสาทวทยาคาร อ าเภอปราสาท จงหวดสรนทร พบวา นกเรยนสวนใหญขาดทกษะการคดสงผลใหนกเรยนไมสามารถท าแบบทดสอบทซบซอนและเชอมโยงได แนวคดฟสกสเรองแรงและการเคลอนทเปนพนฐานของหลายๆ เนอหาทน าไปตอยอด ดงนนผวจยจงออกแบบการจดการเรยนรเพอพฒนาแนวคดของนกเรยนเรองแรงและการเคลอนทโดยใชวธการจดการเรยนรแบบ POE รวมกบชดกจกรรมการสรางตวแทนความคดจากเลโกและวดแนวคดของนกเรยนดวยแบบประเมนมาตรฐานเรองแรงและการเคลอนท (Force and Motion Conception Evaluation ; FMCE) ซงจะน าผลการศกษาไปเปนแนวทางใหครผสอนน าไปใชเปนประโยชนในการแกไขปรบปรงการจดการเรยนการสอนวทยาศาสตรตอไป
1.2 วตถประสงคของกำรวจย
เพอพฒนาความเขาใจแนวคดและความกาวหนาทางการเรยนเรอง “แรงและการเคลอนท” ของนกเรยนชนมธยมศกษาชนปท 4 โดยใชแบบประเมนแนวคดเรอง “แรงและการเคลอนท” (Force and Motion Conception Evaluation: FMCE) กอนและหลงการจดการเรยนรฟสกสแบบเลโก 1.3 ขอบเขตของกำรวจย
1.3.1 ระยะเวลำในกำรทดลอง เรมการทดลองในภาคเรยนท 2 ปการศกษา 2558 ตงแตวนท 14–24 ธนวาคม 2558 ใช
เวลาในการทดลอง 4 ชวโมง 1.3.2 เนอหำทใชในกำรท ำวจย
เนอหาทใชในการท าวจยเปนเนอหาสาระการเรยนรเพมเตม ตามหลกสตรสถานศกษาโรงเรยนประสาทวทยาคาร ในรายวชาฟสกสเพมเตมชนมธยมศกษาปท 4 เรองแรงและการเคลอนท ครอบคลม 2 แนวคด คอ กฎขอท 1 และกฎขอท 2 ของนวตน

4
1.4 ประโยชนทคำดวำจะไดรบ 1.4.1 ท าใหทราบถงความเขาใจการใชตวแทนความคดในการพฒนาแนวคดเรอง “แรงและการ
เคลอนท” 1.4.2 เปนแนวทางในการจดกจกรรมการสรางตวแทนความคดรวมกบการจดการเรยนรแบบ
POE เรอง “แรงและการเคลอนท” เพอน าไปสการพฒนาวธการสอนและกจกรรมการสอนตอไป 1.4.3 ใชผลจากการศกษามาพฒนาการสอนในหวขอตางๆ ทสามารถใชตวแทนความคดในการ
พฒนาความเขาใจแนวคด ซงนกเรยนทเรยนรายวชาฟสกสระดบมธยมศกษาสวนใหญไมสามารถสรางตวแทนความคดไดอยางถกตอง สงผลใหมความเขาใจแนวคดทไมถกตอง 1.5 นยำมศพทเฉพำะ
1.5.1 ตวแทนความคด เปนสงทมนษยใชเปนตวแทนเพอทจะสอสารหรอแสดงออกทางความคดความเขาใจในสงตางๆ เปนสอตวแทนของความคดนามธรรมใหเปนรปธรรมขนมาซงอาจจะแสดงออกมาในรปแบบตางๆ เชนการเขยนค าอธบาย แผนภาพ รป การแสดงทาทาง การท าแบบจ าลอง ฯลฯ
1.5.2 นกเรยน เปนนกเรยนระดบชนมธยมศกษาปท 4/5 โรงเรยนประสาทวทยาคาร จงหวดสรนทร ภาคเรยนท 2 ปการศกษา 2558 ทเรยนวชาฟสกส 1 (ว31201) จ านวน 36 คน โดยการสมแบบเจาะจง (Purposive Sampling) ซงเปนนกเรยนแผนการเรยนวทยาศาสตร-คณตศาสตรทมผลการเรยนอยในระดบต า
1.5.3 แบบประเมนแนวค ด FMCE เป นแบบทดสอบมาตรฐาน (Force and Motion Conception Evaluation: FMCE) ทถกออกแบบโดย Thornton and Sokoloff ซงผานการแปลและประเมนคณภาพโดยกลมวจยฟสกสศกษา PENThai ภาควชาฟสกส คณะวทยาศาสตร มหาวทยาลยมหดล (ฉบบปรบปรงป 2553) ซงเลอกใช 33 ขอ จากทงหมด 47 ขอ ครอบคลมแนวคดเรอง กฎขอท 1 และกฎขอท 2 ของนวตน ในสวนของกระดาษค าตอบจะเวนทวางใหนกเรยนเขยนตวแทนความคดของแตละขอ
1.5.4 ชดกจกรรมการสรางตวแทนความคดดวยเลโก คอ ชดกจกรรมทผวจยออกแบบชดกจกรรมการสรางตวแทนความคดจากเลโก ขนโดยปรบปรงมาจาก Describing Motion with Diagrams ของ (The Physics Classroom, 2009) ผ วจยสรางชดกจกรรมขนมาและผานการตรวจสอบจากอาจารยทปรกษาเพอใหมความนาเชอถอของการวจย (Trustworthiness) มากยงขน จากการตรวจสอบของอาจารยทปรกษาใหเพมสถานการณใหหลากหลายขนใหสอดคลองกบแบบประเมน FMCE และมพนทวางใหนกเรยนฝกเขยนตวแทนความคดทเปนเวกเตอรของความเรว ความเรง กราฟแสดงความสมพนธระหวางการกระจด-เวลา ( s -t) ความเรว-เวลา ( v -t) และ

5
ความเรง-เวลา ( a -t) ของแตสถานการณ และมค าถามในทายชดกจกรรมการสรางตวแทนความคดจากเลโก
1.5.5 การจดการเรยนรแบบ POE คอ วธการจดการเรยนรตามแนวคอนสตรคตวสต โดยผเรยนสามารถสรางความรใหมโดยอาศยความรจากประสบการณเดมและการมปฏสมพนธกบบคคลอน ซงความรทได นกเรยนจะสรางขนดวยตวนกเรยนเอง ท าใหนกเรยนไดแสดงแนวคดของตนเองออกมาอยางเปนขนตอน ซงประกอบดวย 3 ขนตอน ดงน
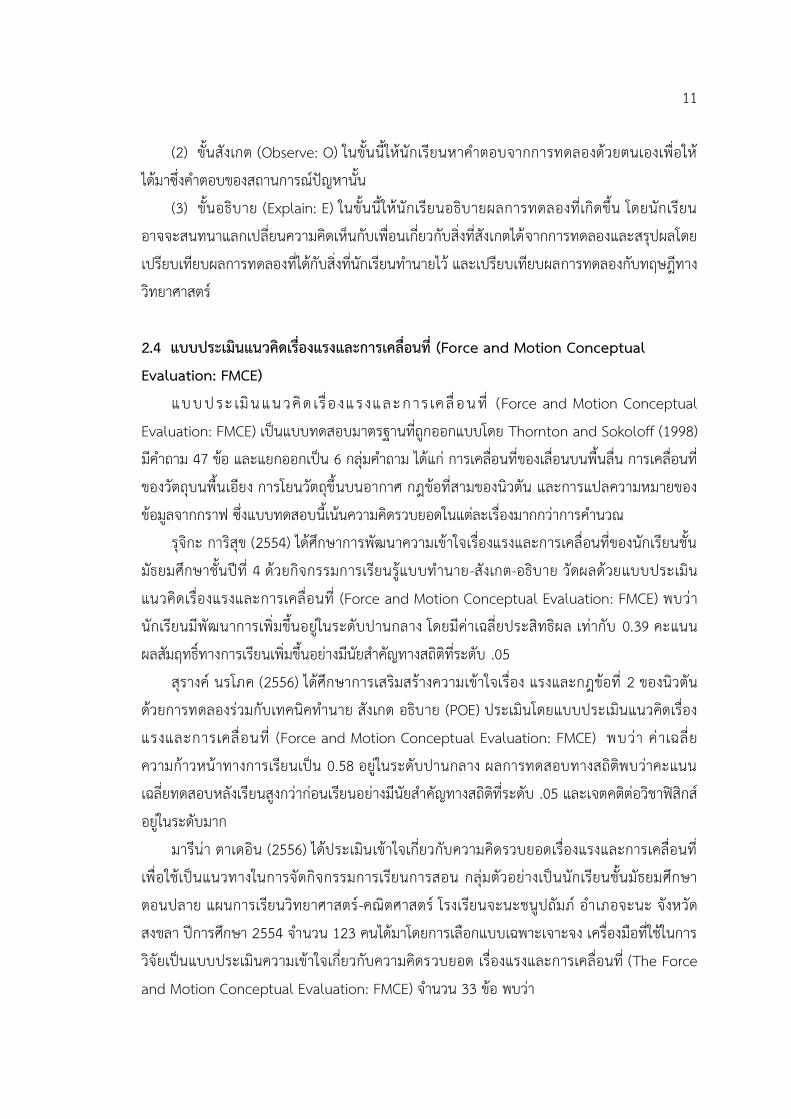
1.5.5.1 ขนท านาย (Predict: P) เปนขนตอนทนกเรยนท านายผลจากสถานการณปญหา 1.5.5.2 ขนสงเกต (Observe: O) เปนขนตอนทนกเรยนท าการทดลองดวยตนเองและ
สงเกตผลการทดลองเพอหาค าตอบตามสถานการณปญหาทก าหนด 1.5.5.3 ขนอธบาย (Explain: E) เปนขนตอนทนกเรยนอธบายถงความเหมอนและความ
แตกตางระหวางค าท านายและผลการสงเกต ซงผเรยนจะสนทนาแลกเปลยนความคดเหนกบเพอนๆ เกยวกบสงทสงเกตได กอนทจะลงมอเขยนอธบายโดยใหเหตผลประกอบ
1.5.6 การจดการเรยนรฟสกสแบบเลโก เปนรปแบบการจดการเรยนการสอนฟสกสโดยใชวธการจดการเรยนรแบบ POE รวมกบชดกจกรรมการสรางตวแทนความคดจากเลโก
1.5.7 ความเขาใจแนวคด คอ ผลการเรยนรดานพทธพสย โดยวดไดจากแบบประเมนแนวคด FMCE
1.5.8 ความกาวหนาทางการเรยน (Normalized gain) คอ ความเขาใจแนวคดทเพมขนของผเรยน ซงประเมนผลดวยวธของ Hake (1998) โดยพจารณาจากผลตางของคะแนนสอบกอนเรยนและหลงเรยนเทยบกบโอกาสสงสดทผเรยนแตละคนจะสามารถท าคะแนนเพมขนได โดยใช Normalized gain วดภาพรวมรายชนเรยน รายบคคล รายแนวคด และรายขอ

6
บทท 2 เอกสารและงานวจยทเกยวของ
งานวจยนจดการเรยนรฟสกสแบบเลโกเพอพฒนาแนวคดเรองแรงและการเคลอนท โดยใชชด
กจกรรมการสรางตวแทนความคดรวมกบการจดการเรยนรแบบ POE ซงผวจยไดศกษาเอกสารและงานวจยทเกยวของ ดงน
2.1 แนวคด (Concept) 2.2 ตวแทนความคด (Mental Representation) 2.3 วธการสอนแบบท านาย-สงเกต-อธบาย (Predict–Observe–Explain: POE) 2.4 แบบประเมนความเขาใจเรองแรงและการเคลอนท (Force and Motion Conceptual
Evaluation: FMCE) 2.5 ความกาวหนาทางการเรยน (Normalized gain)
2.1 แนวคด (Concept)
แนวคด แปลมาจากค าวา Concept ในภาษาองกฤษซงมผทใหค าแปลเปนค าศพทภาษาไทยและนยมใชแตกตางกนหลายค า เชน ความคดรวบยอด แนวคด มโนมต มโนทศน มโนภาพ มโนคต สงกปและแนวความคด ในการวจยครงนผวจยใชค าวา แนวคด มนกการศกษาหลายๆ ทานไดใหความหมายของแนวคด ไวดงน
เกยรตมณ บ ารงไร (2553) กลาววา แนวคดวทยาศาสตรหมายถงความเขาใจโดยสรปเกยวกบสงใดสงหนงทเกดจากการสงเกตหรอไดรบประสบการณเกยวกบสงนนแลวน าคณลกษณะตางๆ ของสงนนมาประมวลเขาเปนความคดโดยสรปสงของนนๆ
ศรนภา ภาคภม (2554) กลาววา แนวคดวทยาศาสตรหมายถงความคดความเขาใจเกยวกบเรองใดเรองหนงในทางวทยาศาสตรทเปนขอสรปซงนกวทยาศาสตรเหนรวมกน
รงโรจน โคตรนารา (2555) กลาววา แนวคดวทยาศาสตรหมายถงความคดหรอความเขาใจภายในตวบคคลทจะตความและสรปเกยวกบสงใดสงหนง อนเปนผลทเกดจากการสงเกตหรอประสบการณเดมทมอย หรอการไดรบประสบการณตรงเกยวกบสงนน แลวใชคณลกษณะส าคญทเกยวกบสงนนมาประมวลเขาดวยกนเปนขอสรป เพออธบายคณลกษณะของสงนนและใหค าจ ากดความของเรองนนหรอสงนนเปนคณสมบตหรอลกษณะทเฉพาะเจาะจงของสงนน
7
จากความหมายของแนวคดวทยาศาสตรทนกการศกษาแตละทานไดใหความหมายไว ผวจยสรปไดวา แนวคด หมายถง ความร ความเขาใจของแตละบคคลทมตอสงใดสงหนง ทเกดจากขอเทจจรงหลกการสถานการณตางๆ หรอการเรยนรทมความหมายแลวน ามาประมวลเปนความรทสามารถอธบายความสมพนธเชงเหตผลไดอยางถกตอง และในการวจยครงนผวจยจะวดความเขาใจแนวคดเรองแรงและการเคลอนทของนกเรยนดวยแบบประเมนแนวคด เรองแรงและการเคลอนท (Force and Motion Conceptual Evaluation: FMCE) 2.2 ตวแทนความคด (Mental Representation)
ตวแทนความคด เปนพนฐานทการท างานดานความคดและกระบวนการคด (Cognitive Process) ตวแทนความคดเปนสงทเกดขนภายใน แตสงทงหลายเหลานนจะตองมความสมพนธในระดบสงกบสงแวดลอมทสงเหลานนสรางขนแทนความร ยงกวานนสงเหลานนจะตองควบคมการกระท า กลยทธและวธการทใชในการแกปญหา สงเหลานนจะตองสามารถใชเพอสรางค าท านายเกยวกบสงแวดลอม และสงเหลานนตองชวยในการแกปญหา
สชาต วฒนชย (2547) ไดกลาววา ตวแทนความคดคอ การอธบาย การบรรยาย การเขยนภาพ สญลกษณ สงเหลานเปลยนสงทเรามองเหน เขาใจ และจนตนาการ มาเปนตวแทนซงท าหนาทในการอธบายการรบรของเรา และการใชตวแทน คอ การใชวตถจรงหรอแบบจ าลองของจรง การวาดภาพ การสรางตาราง การใชสญลกษณ มาชวยในการน าเสนอความคดความเขาใจ
Teller, P. (2015) ไดกลาวถงตวแทนความคดทางวทยาศาสตร ไววาสวนมากการแสดงตวแทนความคดทางวทยาศาสตร จะตองใชภาษาในการแสดงกระบวนการคดการอธบายปรากฏการณธรรมชาต และหลกการทางวทยาศาสตรทเปนบทความวจย ต ารา เอกสารและหนงสอ ลวนตองใชทกษะพเศษดานภาษา ความสามารถในการแยกแยะวตถ สมบต ลกษณะโดยทวไปใชภาษาในการอธบายความหมายเบองตน เชน ส รปรางของวตถทใชแยกแยะวตถ แตถาจะอธบายสงทซบซอนขนอาจใชทกษะอนมากกวาทกษะดานภาษาทวๆ ไป ทกษะอนนนอาจเกยวของกบการรบรและมไดหลายรปแบบ เชน การใชแผนท ภาพประกอบ แผนผง กราฟ และบางอยางไมสามารถมองเหนไดอาจใชจนตนาการ ซงนกวทยาศาสตรจะใชฟงกชน หรอสมการทางคณตศาสตรเขามาอธบาย
ณราภรณ บญกจ (2553) ทไดกลาววา ตวแทนความคดเกยวกบวทยาศาสตรทแสดงออกมา อาจเปนวตถทางกายภาพ สงทเปนรปธรรม ระบบ แบบตวอยางแผนภาพ รปภาพ บรรยาย หรอสมการ เพออธบายปรากฏการณธรรมชาต
สงกรานต มลศรแกว (2553) ไดกลาววา ตวแทนความคด คอ ความสมพนธทเกดขนของทกสงในโลกนและสามารถอธบายไดดวยวทยาศาสตร เปนสงทเกยวกบขอเทจจรง ซ งตวแทนความคดจะ

8
แสดงออกมาตามความเขาใจของแตละคนซงการแสดงออกมานนอาจเปนการแสดงออกมาทางค าพด ขอความภาพวาด ตาราง สญลกษณ หรอแบบจ าลอง
Brewer, WF. 1999 ไดวเคราะหลกษณะของตวแทนความคดเปนพหลกษณ (Pluralitic view) ของสงทสรางขนแทนความรภายในสมอง (Mental Representation) ผานการวเคราะหในทางจตวทยาไว 4 ลกษณะไดแก Images Schemata Naïve Theories และ Mental Model ดงน
(1) ภาพ (Images) คอ การมองตวแทนความรเปนภาพทมอยในสมองซงเปนการรบรสวนบคคล (2) สกมา (Schemata) คอ โครงสรางทางความคดในสมอง โดยมการจดระบบขอมลความร
และประสบการณเปนกลมขอมลสารสนเทศทมอยในตวผเรยน ซงจะมประโยชนในการจดการกบขอมลใหมทจะเขามา และจะถกน ามาใชเมอเราพยายามทท าความเขาใจเรองราวใหมตางๆ ท าใหเกดการคาดคะเน การตความ การปรบปรงขอมลใหมใหสอดคลองกบโครงสรางทมอยแลว และประมวลขอมลเกาและใหมรวมเปนโครงสรางใหมไวใชตอไป เปน Schemata ใหมทมความซบซอน
(3) ทฤษฏแบบเดก (Naïve theories) เปนทฤษฎทกลาวถงตวแทนความคด ในเดกและคนท ไมใชนกวทยาศาสตร การอธบายทางวทยาศาสตรแตกตางจากแนวคดของนกวทยาศาสตรซงนกวทยาศาสตรจะแสดงออกเปนทางการมากกวา ซงไดแก กรอบแนวคดเลอก (Alternative framework) มโนมตท คลาดเคล อน (misconception) หรอ มโนมตทางเลอก (Alternative concept)
(4) รปแบบการท าความเขาใจ (mental model) คอ สงทแสดงถงความเขาใจของแตละบคคล ทอาจสอออกมาในรปของการบรรยาย การอธบาย การวาดรป การประดษฐ การสรางวสดอปกรณ และอนๆ หรออะไรกไดแสดงถงความเขาใจเรองนนๆ ซง mental model ของแตละบคคลไมเหมอนกน ทงนอาจขนอยกบประสบการณในการเรยนรและอายของบคคลนนๆ
จากความหมายของตวแทนความคดทนกการศกษาแตละทานไดใหความหมายไว ผวจยสรปไดวา ตวแทนความคด (Mental Representation) คอ การอธบาย การบรรยาย การเขยนภาพ สญลกษณ สงเหลานเปลยนสงทเรามองเหน เขาใจ และจนตนาการ มาเปนตวแทน ซงท าหนาทในการอธบายการรบรของเรา การใชตวแทนคอการใชวตถจรงหรอแบบจ าลองของจรง การวาดภาพ การสรางตาราง การใชสญลกษณมาชวยในการน าเสนอความคดความเขาใจ ในการวจยนผวจยศกษาตวแทนความคดของนกเรยน โดยใหนกเรยนสอสารทนกเรยนคดออกมาผานการเขยน และการวาดรป เพอน าขอมลเหลานนไปวเคราะหขอมลและจดกลมตวแทนความคดของนกเรยนอกครง

9
2.3 วธการสอนแบบท านาย-สงเกต-อธบาย (Predict Observe Explain: POE) กระบวนการจดการเรยนรแบบ POE เปนรปแบบหนงในวธการจดการเรยนรตามทฤษฎคอน
สตรคตวสตทสนบสนนใหนกเรยนไดตดสนใจเกยวกบความเขาใจทมอยและอยบนพนฐานของความเชอเดม
White and Gunstone (1992) ไดกลาววา วธการสอนแบบ POE เปนวธการทมประสทธภาพทจะสงเสรมใหนกเรยนไดแสดงความคดเหนและอภปรายเกยวกบแนวคดทางวทยาศาสตร เปนขนตอนการน าเสนอสถานการณและใหนกเรยนท านายวา จะเกดอะไรขนถามการเปลยนแปลง หลงจากนกเรยนท านายแลวใหนกเรยนสงเกตสถานการณดงกลาว โดยใหนกเรยนลงมอทดลอง สงเกต หรอหาวธพสจนเพอหาค าตอบจากสถานการณ ทครสรางขน หลงจากนนใหนกเรยนบอกสงทนกเรยนสงเกตไดจากการสบเสาะหาความร ดวยตวนกเรยนเอง และขนสดทายนกเรยนจะตองอธบายถงความแตกตางระหวางสงทไดจากการท านายและการสงเกตหรอผลการทดลองทได ซงวธการสอนแบบ POE ประกอบดวย 3 ขนตอนดงน
(1) ขนตอนของการ Predict คอ จะเปนการท านายวาผลทจะเกดจากการทดลอง กจกรรมและ สถานการณทก าหนดใหจะเปนอยางไรบาง โดยทนกเรยนจะตองใหเหตผลเกยวกบการท านาย ของนกเรยนประกอบดวย
(2) ขนตอนของการ Observe เปนขนตอนทนกเรยนตองลงมอทดลอง พสจนหาค าตอบ เกยวกบการทดลอง กจกรรมและสถานการณปญหา
(3) ขนตอนของการ Explain เปนขนตอนทนกเรยนจะเกดความขดแยงขนระหวางสงทท านาย และผลจากการหาค าตอบเกยวกบการทดลอง กจกรรมและสถานการณปญหา ซงนกเรยนจะตองอธบายใหไดวาถาค าตอบทไดจากการทดลอง กจกรรมหรอสถานการณปญหาไมเปนไปตามทท านายผลไวในขนแรกเพราะอะไร และในกรณทไมสามารถหาค าตอบไดดวยตนเองนกเรยนจะตองรวมมอกบเพอนในการหาค าตอบ
ณราภรณ บญกจ (2553) ไดศกษาตวแทนความคดของนกเรยนเกยวกบเรองแสงกอนและหลงการจดการเรยนรบนพนฐานทฤษฏคอนสตรคตวสต โดยใชวธการท านาย-สงเกต-อธบาย (POE) กลมเปาหมายเปนนกเรยนชนมธยมศกษาปท 5/1 โรงเรยนแคมปสนวทยาคม จ านวน 38 คนเครองมอทใชไดแก แผนการจดการเรยนรโดยใชรปแบบการจดการเรยนรแบบ POE ใบกจกรรม POE แบบสอบถามซงเปนแบบสอบถามประกอบดวยค าถามปลายเปด และการสมภาษณอยางไมเปนทางการโดยตวแทนความคดของนกเรยนจะถกแบงเปนกลมๆ ตามเหตผลของนกเรยนทใชอธบาย เรองแสง ผลการวจยพบวากอนการจดการเรยนรโดยใชวธ POE เกยวกบเรองแสงในหวขอทางเดนของแสงนกเรยนสวนใหญมตวแทนความคดวาแสงเปนอนภาคมสมบตเหมอนของเหลวแตนกเรยนบางสวนมตวแทนความคดวา แสงเปนคลนและเดนทางเปนเสนตรง และแสงเปนอนภาคเคลอนทแบบหมน

10
หลงเรยนพบวานกเรยนสวนใหญมตวแทนความคดวาแสงเดนทางเปนเสนตรงแสดงสมบตเปนทงคลนและอนภาค
สงกรานต มลศรแกว (2553) ไดศกษาตวแทนความคด เรองของไหล บนพนฐานคอนสตรคตวสต โดยใชรปแบบการจดการเรยนรแบบท านาย-สงเกต-อธบาย (Predict-Observe-Explain: POE) กลมเปาหมายเปนนกเรยนชนมธยมศกษาปท 5 ภาคเรยนท 1 ปการศกษา 2552 โรงเรยนคานาดพทยาคม อ าเภอโพนทอง จงหวดรอยเอด จ านวน 30 คน ท าการศกษาตวแทนความคดของนกเรยนโดยวเคราะหขอมลจากการตอบแบบสอบถามปลายเปดของนกเรยนเรองของไหล และการสมภาษณนกเรยนเพมเตม เพอน ามาตความ และจดกลมตวแทนความคดของนกเรยนโดยเทยบกบตวแทนความคดทางวทยาศาสตรทงกอน และหลงการจดกจกรรมการเรยนรโดยใชรปแบบการจดการเรยนรแบบ POE ผลการวจยพบวานกเรยนมตวแทนความคดทแสดงออกแตกตางกน แตหลงจากการจดการเรยนรโดยวธ POE ในภาพรวมนกเรยนมตวแทนความคดทแสดงออกมาไดใกลเคยงกบตวแทนความคดทางวทยาศาสตร
เกยรตมณ บ ารงไร (2553) ท าการวจยเพอส ารวจมโนมตทางเลอกเรองแรงและการเคลอนทและพฒนามโนมตวทยาศาสตรเรองแรงและการเคลอนท ดวยกจกรรมการเรยนรแบบ วธการท านาย-สงเกต-อธบาย (Predict-Observe-Explain: POE) กลมเปาหมายเปนนกเรยนชนมธยมศกษาปท 1 โรงเรยนบานตะบอง “เจรญราษฎรอทศ” ส านกงานเขตพนทการศกษานครราชสมา เขต 7 ทก าลงศกษาในภาคเรยนท 2 ปการศกษา 2552 จ านวน 40 คน รปแบบการวจยเปนการวจยเชงตความ เครองมอทใชประกอบดวยแผนการจดการเรยนรแบบ POE และ แบบวดมโนมตแรงและการเคลอนท การวเคราะหขอมลเนนการตความมโนมตของนกเรยนจากแบบวดมโนมตแรงและการเคลอนท และการสมภาษณนกเรยนเพมเตม ผลการวจยพบวา นกเรยนมมโนมตทางเลอกทหลากหลาย โดยมโนมตทางเลอกในเรองต าแหนงของวตถ แบงออกเปน 4 กลมมโนมต คอ 1) เลอกจดอางองทมบรเวณกวาง 2) ระบทศทางอยางงาย 3) ระบทศทางเทยบกบตนเอง 4) ระบทศทางและระยะหางเทยบกบจดอางองเดม และผลการพฒนามโนมตเรองแรงและการเคลอนท พบวา นกเรยนมากกวารอยละ 70 ไดพฒนามโนมตทางเลอกไปสมโนมตวทยาศาสตร
จากความหมายของวธการสอนแบบท านาย-สงเกต-อธบาย (Predict Observe Explain: POE)ทนกการศกษาแตละทานไดใหความหมายไว ผวจยสรปไดวา การจดกจกรรมการเรยนรโดยวธ POE หมายถงการสอนทชวยใหผเรยนเกดความเขาใจในเรองทเรยนโดยผเรยนนนเปนผ ลงมอปฏบตเองประกอบดวย 3 ขนตอนดงน
(1) ขนท านาย (Predict: P) ในขนนครใหนกเรยนท านายสงทจะเกดขนจากสถานการณปญหาทก าหนด นกเรยนจะไดแสดงความคดเหนและท านายค าตอบ ซงค าตอบจะสะทอนความเขาใจและความรเดมทมอย
11
(2) ขนสงเกต (Observe: O) ในขนนใหนกเรยนหาค าตอบจากการทดลองดวยตนเองเพอใหไดมาซงค าตอบของสถานการณปญหานน
(3) ขนอธบาย (Explain: E) ในขนนใหนกเรยนอธบายผลการทดลองทเกดขน โดยนกเรยนอาจจะสนทนาแลกเปลยนความคดเหนกบเพอนเกยวกบสงทสงเกตไดจากการทดลองและสรปผลโดยเปรยบเทยบผลการทดลองทไดกบสงทนกเรยนท านายไว และเปรยบเทยบผลการทดลองกบทฤษฎทางวทยาศาสตร 2.4 แบบประเมนแนวคดเรองแรงและการเคลอนท (Force and Motion Conceptual Evaluation: FMCE)
แบ บ ป ระ เม น แน วค ด เร อ งแ รงและการ เคล อ น ท (Force and Motion Conceptual Evaluation: FMCE) เปนแบบทดสอบมาตรฐานทถกออกแบบโดย Thornton and Sokoloff (1998) มค าถาม 47 ขอ และแยกออกเปน 6 กลมค าถาม ไดแก การเคลอนทของเลอนบนพนลน การเคลอนทของวตถบนพนเอยง การโยนวตถขนบนอากาศ กฎขอทสามของนวตน และการแปลความหมายของขอมลจากกราฟ ซงแบบทดสอบนเนนความคดรวบยอดในแตละเรองมากกวาการค านวณ
รจกะ การสข (2554) ไดศกษาการพฒนาความเขาใจเรองแรงและการเคลอนทของนกเรยนชนมธยมศกษาชนปท 4 ดวยกจกรรมการเรยนรแบบท านาย-สงเกต-อธบาย วดผลดวยแบบประเมนแนวคดเรองแรงและการเคลอนท (Force and Motion Conceptual Evaluation: FMCE) พบวา นกเรยนมพฒนาการเพมขนอยในระดบปานกลาง โดยมคาเฉลยประสทธผล เทากบ 0.39 คะแนนผลสมฤทธทางการเรยนเพมขนอยางมนยส าคญทางสถตทระดบ .05
สรางค นรโภค (2556) ไดศกษาการเสรมสรางความเขาใจเรอง แรงและกฎขอท 2 ของนวตน ดวยการทดลองรวมกบเทคนคท านาย สงเกต อธบาย (POE) ประเมนโดยแบบประเมนแนวคดเรองแรงและการเคลอนท (Force and Motion Conceptual Evaluation: FMCE) พบวา คาเฉลยความกาวหนาทางการเรยนเปน 0.58 อยในระดบปานกลาง ผลการทดสอบทางสถตพบวาคะแนนเฉลยทดสอบหลงเรยนสงกวากอนเรยนอยางมนยส าคญทางสถตทระดบ .05 และเจตคตตอวชาฟสกสอยในระดบมาก
มารนา ตาเดอน (2556) ไดประเมนเขาใจเกยวกบความคดรวบยอดเรองแรงและการเคลอนท เพอใชเปนแนวทางในการจดกจกรรมการเรยนการสอน กลมตวอยางเปนนกเรยนชนมธยมศกษา ตอนปลาย แผนการเรยนวทยาศาสตร-คณตศาสตร โรงเรยนจะนะชนปถมภ อ าเภอจะนะ จงหวดสงขลา ปการศกษา 2554 จ านวน 123 คนไดมาโดยการเลอกแบบเฉพาะเจาะจง เครองมอทใชในการวจยเปนแบบประเมนความเขาใจเกยวกบความคดรวบยอด เรองแรงและการเคลอนท (The Force and Motion Conceptual Evaluation: FMCE) จ านวน 33 ขอ พบวา

12
(1) นกเรยนชนมธยมศกษาปท 4-6 มความสามารถในการท าขอสอบ FMCE ไดไมแตกตางกน โดยมคะแนนกอนเรยนเทากบรอยละ 21.39, 19.45 และ 17.46 ตามล าดบ
(2) นกเรยนทมความสามารถแตกตางกน (กลมเกง กลาง ออน) มความสามารถในการท า ขอสอบ FMCE ไดไมแตกตางกน โดยมคะแนนกอนเรยนเทากบรอยละ 17.42 , 19.44, 19.05 ตามล าดบ
(3) นกเรยนชนมธยมศกษาปท 4-6 มความสามารถในการท าขอสอบ FMCE ในแตละกลมโจทย (cluster) ไดไมแตกตางกน โดยกลมโจทยทท าคะแนนไดมากทสด คอ velocity graphs (รอยละ 38.41) และกลมโจทยทท าคะแนนไดนอยทสด คอ reversing direction (รอยละ 10.00) และยงพบอกวา แบบประเมนขอทมนกเรยนตอบถกมากทสด คอขอท 15 (รอยละ 79.23) และขอทมนกเรยนตอบถกนอยทสด คอ ขอท 3 (รอยละ 1.50)
(4) นกเรยนทมความสามารถแตกตางกน (กลมเกง กลาง ออน) มความสามารถในการท าขอสอบ FMCE ในแตละกลมโจทย (cluster) ไดไมแตกตางกน โดยกลมโจทยทท าคะแนนไดมากทสด คอ velocity graphs (รอยละ 41.96) และกลมโจทยทท าคะแนนไดนอยทสด คอ reversing direction (รอยละ 8.44) ในเบองตนผวจยไดสมภาษณ นกเรยนใหเหตผลในการตอบวา ไมสามารถเชอมโยงความสมพนธระหวางความเรงกบทศการเคลอนท และความสมพนธระหวางแรงกบทศการเคลอนทได
ในการวจยในตรวจสอบเนอหาของแบบทดสอบและปรบปรงขอความใหเหมาะสมกบนกเรยนชนมธยมศกษาตอนปลาย ใชแบบทดสอบ 33 ขอไมรวมเรองพลงงานและกฎการเลอนทขอทสามของนวตน โดยแบงออกเปน 5 กลมค าถาม (Smith and Witmann, 2008) คอ 1) แรงทกระท าตอเลอน 2) การเคลอนทกลบทศ 3) กราฟของแรง 4) กราฟความเรง 5) กราฟความเรว 2.5 ความกาวหนาทางการเรยน (Normalized gain)
Hake R.R. (1998) นกฟสกสแหง University of Indiana ไดเสนอวธการประเมนผลการเรยนรจากการสอน pre-test และ post-test โดยมวธการดงน
เนองจากในการสอบครงหนงๆ มขอจ ากดในเรองคะแนนต าสด (minimum or floor effect) ททกคนจะมโอกาสไดคะแนนต าสดไมนอยกวา 0 เปอรเซนต และโอกาสทจะไดคะแนนสงสด (maximum or ceiling effect) ไมเกน 100 เปอรเซนต หรอทเรยกวา floor and ceiling effect ดวยปญหาน Hake จงไดเสนอวธการในการประเมนผลการเรยนรทเพมขน เรยกวา normalized gain (normalized เปนค าทมาจากค าศพททางควอนตมฟสกส ซงหมายถงการท าใหมโอกาสความเปนไปไดเทาๆ กน โดยมคาเปนไปไดสงสดเทากบ 1 เทากน) โดยหาไดจาก อตราสวนของผลการ

13
เรยนรทเพมขนจรง (Actual gain) ตอผลการเรยนรสงสดทมโอกาสเพมขนได (Maximum possible gain) เขยนเปนสมการความสมพนธไดดงน
test%pre100%
test%pretest%postg (2.1)
โดยท <g> คอ คา normalized gain
% Post-test คอ คาเฉลยของคะแนนสอบหลงเรยนเปนเปอรเซนต % Pre-test คอ คาเฉลยของคะแนนสอบกอนเรยนเปนเปอรเซนต
สามารถแบงระดบของคา normalized gain ออกเปนกลมไดเปนสามระดบ คอ “High gain” เปนชนเรยนทไดคา <g> ≥ 0.7
“Medium gain” เปนชนเรยนทไดคา 0.7 ≤ <g> ≥ 0.3 “Low gain” เปนชนเรยนทไดคา 0.0 ≤ <g> >0.3
ส าหรบการพจารณา normalized gain เพอศกษาวานกเรยนมผลการเรยนเพมขนอยางไรทงในระดบชนเรยน ระดบแตละแนวคด แตละรายบคคล หรอแมกระทงรายขอนนเราจะไดแยกแยะใหเหนวาสามารถท าไดอยางไร แบงประเภทของ normalized gain ออกเปนดงน
2.5.1 แบบรายชนเรยน (class normalized gain) หมายถงการพจารณาวาผลการเรยนรของนกเรยนทงชนนนเพมขนคดเปนกเทาของผลการเรยนรสงสดทมโอกาสเพมขนไดโดยดไดจากคะแนนเฉลยของทงชนทงกอนและหลงเรยน
พจารณาผลการเรยนของนกเรยนในลกษณะนใชเพอดวาผลการเรยนการสอนโดยภาพรวมของทงชนนนมพฒนาการขนมากนอยเพยงใดซงโดยทวไปนกวจยจะอางถงเนองจากสามารถบอกเปนภาพรวมของทงชนอยางไรกตามในการคดค านวณเพอหาคา Normalized gain นอาจใชการนบคะแนนหรอนบจ านวนนกเรยนทตอบขอสอบไดถกตองเพอมาเขาสตรการค านวณผลการค านวณทไดจะเปนการบอกภาพรวมของทงชนวามผลการเรยนดขนมากนอยเพยงใดแตถาหากตองการดวานกเรยนแตละคนมผลการเรยนเพมขนหรอลดลงเปนอยางไรไมอาจสรปไดดวยวธการน
2.5.2 แบบละรายบคคล (single student normalized gain) หมายถงการพจารณาวานกเรยนแตละคนมพฒนาการการเรยนรเปนอยางไรโดยดไดจากคะแนนสอบกอนเรยนและหลงเรยนของนกเรยนแตละคน ส าหรบการหาคา <g> ของนกเรยนแตละคนทงชนแลวมาหาคาเฉลย (average of the single student normalized gain) หรออาจจะเรยกวาเปนคาเฉลย <g> ของนกเรยนหองนซงควรจะเปนคาเดยวกนกบ Class normalized gain แตคาทไดจากวธนจะพบวามคาไมเทากนโดย

14
คาทไดดวยวธนจะมคาอยในชวง ±5% ของ Class normalized gain โดยทจ านวนประชากรททดสอบตองมคาตงแต 20 คนขนไป
อยางไรกตามในทางปฏบตเราอาจจะท าไดล าบากส าหรบการทจะด <g> ของนกเรยนแตละคนเนองจากตองใชเวลามากถานกเรยนมจ านวนมากแตส าหรบชนเรยนทมนกเรยนจ านวนนอยเราสามารถดไดและจะเปนการดเนองจากท าใหครสามารถดพฒนาการของนกเรยนแตละคนไดเปนอยางดอนจะเปนแนวทางในการชวยเสรมใหกบนกเรยนมผลการเรยนรทต าไดหรออาจใหนกเรยนทผลการเรยนทดอยแลวมาชวยเหลอเพอนได
2.5.3 แบบละรายขอ (single test item normalized gain) หมายถงการพจารณาวาจ านวนนกเรยนทตอบถกเพมขนเปนเทาใดของขอสอบขอทเราก าลงพจารณาในการสอบกอนเรยนและหลงเรยน
การพจารณาในลกษณะนมขอดคอ ท าใหบอกไดวานกเรยนมความเขาใจตอขอสอบขอนนเปนอยางไรซงสามารถน ามาเปนขอมลในการปรบปรงการเรยนการสอนในเรองทเกยวของกบขอสอบขอนนๆ ไดเปนอยางดส าหรบขอสอบชดหนงๆ โดยเฉพาะขอสอบทเปน Conceptual test จะมการแบงหมวดหมของขอสอบออกเปนกลมตามแนวความคดรวบยอด (concept) ทผสรางแบบทดสอบไดตงไวตงแตตอนแรกดงนนจงนยมทจะพจารณาผลการเรยนรทเพมขนของนกเรยนตอกลมขอสอบกลมนนๆ อนจะท าใหบอกไดวานกเรยนมความเขาใจตอแนวความคดรวบยอดนนเปนอยางไร
2.5.4 แบบละรายแนวคด (conceptual dimensional normalized gain) เปนการดวาพฒนาการหรอผลการเรยนรทเพมขนของนกเรยนทมตอ Concept หนงๆ เปนอยางไร
การพจารณาผลการเรยนรในลกษณะนจะใชในกรณทตองการดวานกเรยนมผลการเรยนหรอมพฒนาการตอการเรยนในหวขอนนๆ เปนอยางไรเนองจากการสอบครงหนงๆ จะมการสอบรวบยอดเพอทจะดผลการเรยนทนกเรยนสอบไดตอขอสอบชดนนๆ ซงขอสอบมาตรฐานทวไปจะมการวดความเขาใจหลายๆ Concepts อยในขอสอบชดเดยวกน ดงนนหากเราดเฉพาะคะแนนรวมไมอาจบอกไดวานกเรยนมความเขาใจในแตละแนวความคดรวบยอดนนมากนอยเพยงใดจงเปนการดทเราจะดไดวานกเรยนมความเขาใจผดในเรองใดมากหรอนอยเพอทจะเปนแนวทางในการพฒนาการสอนไดตรงประเดนทนกเรยนมความเขาใจผดกนมากสวนประเดนทนกเรยนมผลการเรยนรทดอยแลวเรากสามารถน าไปพฒนาตอใหดขนไปอกไดเชนกน
จากทกลาวมาขางตน ผวจยจงไดน าวธ Normalized gain มาใช ในการประเมนความกาวหนาทางการเรยนของนกเรยน โดยวดผลจากคะแนนกอนเรยนและหลงเรยนทไดจากการท าแบบประเมนแนวคด FMCE จ านวน 33 ขอ ของนกเรยน ซงในการวจยครงนผวจยจะพจารณาวานกเรยนมผลการเรยนเพมขนอยางไร 4 แบบ คอ รายชนเรยน รายบคคล รายแนวคด และรายขอ

15
บทท 3 วธการด าเนนงานวจย
งานวจยนการจดการเรยนรฟสกสแบบเลโกเพอพฒนาแนวคดเรองแรงและการเคลอนทจากการ
สรางตวแทนความคดดวยเลโกของนกเรยนชนมธยมศกษาชนปท 4/5 โรงเรยนประสาทวทยาคาร อ าเภอปราสาท จงหวดสรนทร เกบขอมลโดยใชแบบประเมนแนวคด FMCE และวเคราะหผลดวย t-test Normalized gain และการจดกลมตวแทนความคดทถกตอง ซงผวจยไดด าเนนการวจยตามขนตอนดงน
3.1 การเลอกกลมตวอยางและแบบแผนการวจย 3.2 เครองมอวจย 3.3 การด าเนนการวจยและเกบขอมล 3.4 การวเคราะหขอมล
3.1 การเลอกกลมตวอยางและแบบแผนการวจย
3.1.1 การเลอกกลมตวอยาง กลมตวอยางเปนนกเรยนระดบชนมธยมศกษาปท 4/5 โรงเรยนประสาทวทยาคาร
จงหวดสรนทร ภาคเรยนท 2 ปการศกษา 2558 ทเรยนวชาฟสกส 1 (ว31201) จ านวน 36 คน โดยการสมแบบเจาะจง (Purposive Sampling) ส าหรบนกเรยนมธยมศกษาตอนปลายแผนการเรยนวทยาศาสตร-คณตศาสตรระดบชนมธยมศกษาปท 4 มทงหมด 5 หอง หองทใชเปนกลมตวอยางเปนหองสดทายของแผนการเรยนน ซงเปนเดกกลมทมผลการเรยนทต า ทสดของแผนการเรยนวทยาศาสตร-คณตศาสตร
3.1.2 แบบแผนการวจย การวจยครงนมแบบแผนการวจยเชงทดลอง (Experimental Research) ใชนกเรยน
เพยงกลมเดยวทมการทดสอบกอนเรยนและหลงเรยน (One Group Pretest-Posttest Design) 1T X 2T (3.1)
16
เมอ 1T คอ การทดสอบกอนการทดลอง (Pretest) X คอ การจดการเรยนรฟสกสแบบเลโก 2T คอ การทดสอบหลงการทดลอง (Posttest) 3.2 เครองมอวจย
เครองมอทใชในการวจยครงนประกอบดวย 3.2.1 แบบประเมนแนวคดเรองแรงและการเคลอนท (Force and Motion Conceptual
Evaluation: FMCE) ในการวจยนใชแบบประเมนแนวคด FMCE ฉบบภาษาไทย จ านวน 33 ขอ ซงผานการ
แปลและประเมนคณภาพโดยกลมวจยฟสกสศกษา PENThai ภาควชาฟสกส คณะวทยาศาสตร มหาวทยาลยมหดล (ฉบบปรบปรงป 2553) ส าหรบเกบขอมลกอนเรยนและหลงเรยนของนกเรยน ในงานวจย (ภาคผนวก ข) เพอเพมความนาเชอถอ (Trustworthiness) ของแบบประเมนแนวคด FMCE ผานการตรวจสอบจากอาจารยทปรกษาวทยานพนธ โดยมค าแนะน าให เวนพนทวางในกระดาษค าตอบเพอใหนกเรยนเขยนตวแทนความคดทแสดงแนวคดของนกเรยนแตละคน
3.2.2 แผนการจดการเรยนรแบบท านาย-สงเกต-อธบาย (Predict Observe Explain: POE)
การจดการเรยนรโดยใชวธการจดการรยนรแบบ POE ทผวจยออกแบบครงน โดยอาศยสอทนาเชอถอรวมกบการจดกจกรรมการสรางตวแทนความคดจากเลโกเพอพฒนาแนวคดเรองแรงและการเคลอนท ซงการจดการเรยนรโดยใชวธการจดการเรยนร POE ม 3 ขนตอน ดงน
3.2.2.1 ขนท 1 ท านาย (Predict: P) ผวจยสอนโดยจะเรมตนโดยการสาธตการทดลองทพบในชวตประจ าวนให
นกเรยนดแลวตงค าถาม ดงน
ภาพท 3.1 รถทดลอง

17
ถาออกแรงผลกรถทดลองใหเคลอนทบนพนราบ วงขนบนพนเอยงและวงลงบนพนเอยง ลกษณะการเคลอนทของรถจะเปนอยางไร มปรมาณในทางฟสกสใดบางเกดขนในขณะทรถก าลงเคลอนทและปรมาณทเกดขนนนมแนวโนมเปนอยางไร เราใหนกเรยนลองท านายค าตอบทเกดขนซงค าตอบทไดนนมาจากความรเดมทนกเรยนตดตวมา (Prior Knowledge) จากนนใหนกเรยนไดรวมกนท านายค าตอบเพอดวา ผลการท านายของค าตอบสวนใหญของนกเรยนเปนอยางไร
ภาพท 3.2 ปลอยลกบอลตกอยางอสระ (Ball Drop) โดยใชโปรแกรม Tracker
จากนนใหนกเรยนฝกการท านายโดยใชโปรแกรม Tracker เพอใหนกเรยนเหนลกษณะการเคลอนทเปนรปธรรมมากขน โดยสถานการณทเลอกใชคอ การปลอยลกบอลตกอยางอสระ (Ball Drop) ใหนกเรยนสงเกตและท านายผลวา ปรมาณความเรวและความเรงของลกบอลแตละชวงเวลามลกษณะอยางไร
3.2.2.2 ขนท 2 สงเกต (Observe: O) 1) ผวจยอธบายทบทวนความรเดมของนกเรยนกอนลงมอท ากจกรรม ดงน
1.1) การหาเวกเตอรลพธ 1.1.1) การหาเวกเตอรลพธโดยวธการเขยนรปแบบหางตอหว 1.1.2) การหาเวกเตอรลพธโดยวธการเขยนรปแบบหางตอหว ม
ขนตอนดงน 1.1.2.1) เขยนลกศร แทนเวกเตอรแรกตามขนาดและทศทาง
ทก าหนด

18
1.1.2.2) น าหางลกศร แทนเวกเตอรท 2 ตอเขากบหวลกศร ของเวกเตอรแรก
1.1.2.3) ถามเวกเตอรยอยๆ อกใหน าเวกเตอรอนตอๆ ไปมากระท าดงขอท 2.1.1.2 จนครบทกเวกเตอร
1.1.2.4) เวกเตอรลพธของเวกเตอรยอยๆ เหลานนหาไดโดยการลากลกศรจากหางของเวกเตอรแรกไปยงหวลกศรของเวกเตอรอนสดทาย ลกศรทลากนแทนทงขนาดและทศทางของเวกเตอรลพธ
ตวอยางการหาเวกเตอรลพธโดยวธการเขยนรปแบบหางตอหว
ภาพท 3.3 การหาเวกเตอรลพธโดยวธการวาดรปแบบหางตอหวซงเวกเตอรทงสองตงฉากกน
ภาพท 3.4 การหาเวกเตอรลพธโดยวธการวาดรปแบบหางตอหวซงเวกเตอรทงสองไปทางเดยวกน
ภาพท 3.5 การหาเวกเตอรลพธโดยวธการวาดรปแบบหางตอหวซงเวกเตอรทงสองไปสวนทางกน
19
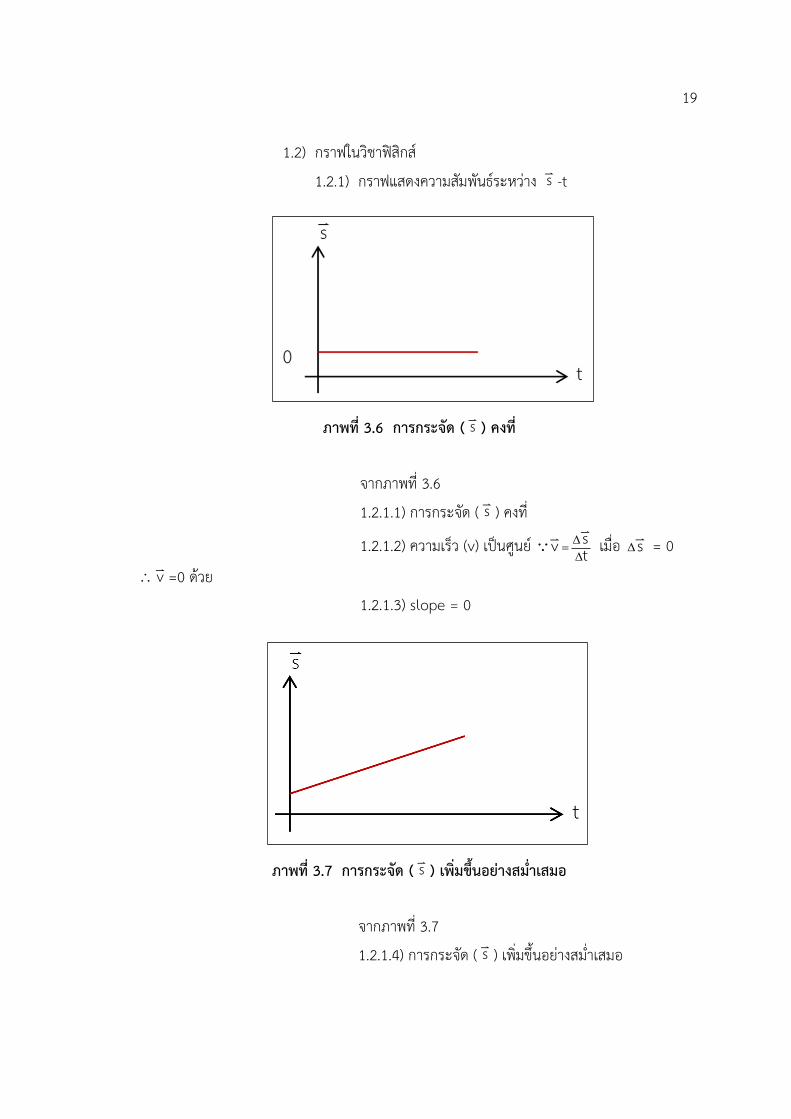
1.2) กราฟในวชาฟสกส 1.2.1) กราฟแสดงความสมพนธระหวาง s -t
ภาพท 3.6 การกระจด ( s ) คงท
จากภาพท 3.6 1.2.1.1) การกระจด ( s ) คงท
1.2.1.2) ความเรว (v) เปนศนย tsvΔ
Δ
เมอ sΔ = 0
v =0 ดวย 1.2.1.3) slope = 0
ภาพท 3.7 การกระจด ( s ) เพมขนอยางสม าเสมอ
จากภาพท 3.7 1.2.1.4) การกระจด ( s ) เพมขนอยางสม าเสมอ

20
1.2.1.5) ความเรว ( v ) คงท tsvΔ
Δ
เมอ sΔ คงท v
คงทดวย
1.2.1.6) slope มคาคงท = tsΔ
Δ
ภาพท 3.8 การกระจด ( s ) เพมขนไมสม าเสมอ
จากภาพท 3.8 1.2.1.7) การกระจด ( s ) เพมขนไมสม าเสมอ 1.2.1.8) slope เพมขน (โคงหงาย) 1.2.1.9) ความเรว ( v ) เพมขน
1.2.2) กราฟแสดงความสมพนธระหวาง v -t
ภาพท 3.9 ความเรว ( v ) คงท
จากภาพท 3.9 1.2.2.1) ความเรว ( v ) คงท

21
1.2.2.2) ความเรง ( a ) เปนศนย tvaΔ
Δ
เมอ vΔ = 0
a = 0 ดวย 1.2.2.3) slope = 0
ภาพท 3.10 ความเรว ( v ) เพมขนอยางสม าเสมอ
จากภาพท 3.10 1.2.2.4) ความเรว ( v ) เพมขนอยางสม าเสมอ
1.2.2.5) ความเรง ( a ) คงท tvaΔ
Δ
เมอ vΔ คงท a
คงทดวย
1.2.2.6) slope มคาคงท = tvΔ
Δ
ภาพท 3.11 ความเรว ( v ) เพมขนไมสม าเสมอ

22
จากภาพท 3.11 1.2.1.7) ความเรว ( v ) เพมขนไมสม าเสมอ 1.2.1.8) slope เพมขน (โคงหงาย) 1.2.1.9) ความเรง ( a ) เพมขน
1.2.3) กราฟแสดงความสมพนธระหวาง a - t
ภาพท 3.12 ความเรง ( a ) คงท
จากภาพท 3.12 1.2.3.1) ความเรง ( a ) คงท 1.2.3.2) ความเรว ( v ) เปลยนแปลงอยางสม าเสมอ 1.2.3.3) slope = 0
ภาพท 3.13 ความเรง ( a ) เพมขนสม าเสมอ

23
จากภาพท 3.13 1.2.3.4) ความเรง ( a ) เพมขนอยางสม าเสมอ 1.2.3.5) ความเรว ( v ) เพมขนไมสม าเสมอ 1.2.3.6) slope คงท
รปท 3.14 ความเรง ( a ) เพมขนไมสม าเสมอ
จากภาพท 3.14 1.2.3.7) ความเรง ( a ) เพมขนอยางไมสม าเสมอ 1.2.3.8) slope เพมขน (รปโคงหงาย)
2) ผวจยอธบายขนตอนการสรางตวแทนความคดดวยเลโกแลวใหนกเรยนลง
มอท ากจกรรมเพอหาค าตอบเกยวกบสถานการณตางๆ กรณนจะยกตวอยางในสถานการณท 3 ของชดกจกรรม ดงแสดงในภาพท 3.15 ซงมรายละเอยดของกจกรรมในภาคผนวก ก
ภาพท 3.15 สถานการณท 3 รถก าลงเคลอนทไปดานขวา ใชกลองจบภาพรถทกๆ 1 วนาท
2.1) ก าหนดเลโกทน ามาสรางตวแทนความคด ดงน
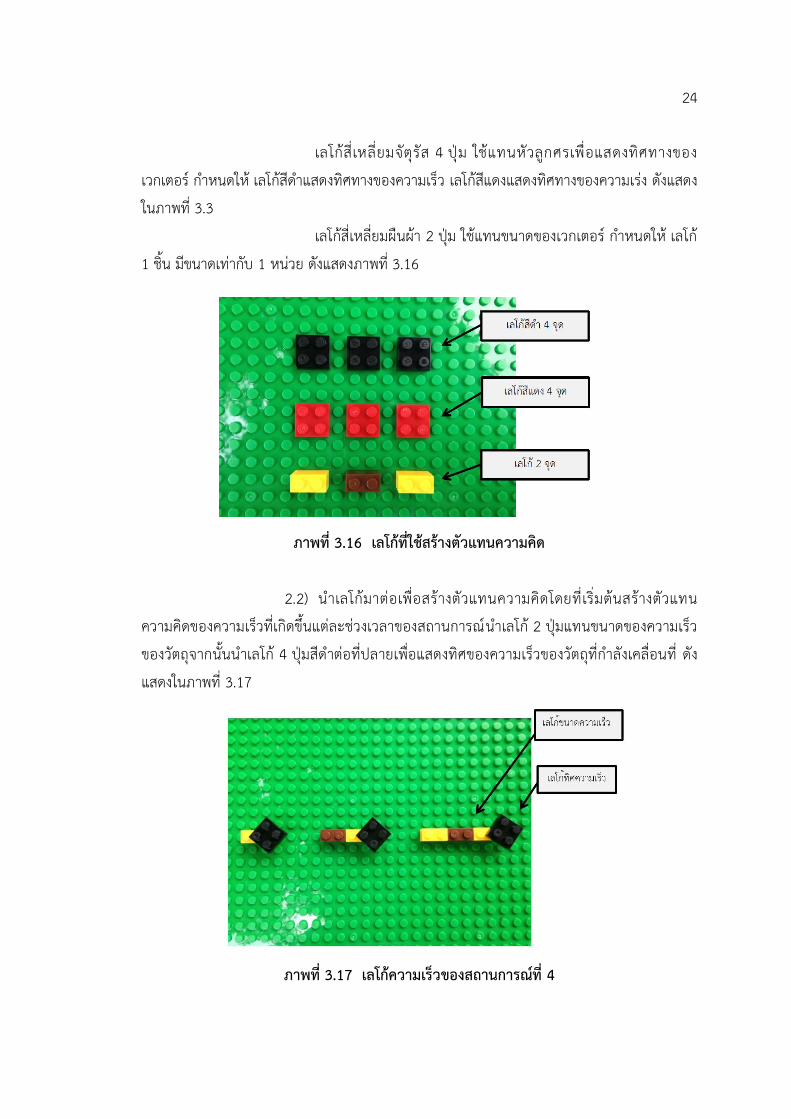
24
เลโกส เหลยมจตรส 4 ปม ใชแทนหวลกศรเพอแสดงทศทางของเวกเตอร ก าหนดให เลโกสด าแสดงทศทางของความเรว เลโกสแดงแสดงทศทางของความเรง ดงแสดงในภาพท 3.3
เลโกสเหลยมผนผา 2 ปม ใชแทนขนาดของเวกเตอร ก าหนดให เลโก 1 ชน มขนาดเทากบ 1 หนวย ดงแสดงภาพท 3.16
ภาพท 3.16 เลโกทใชสรางตวแทนความคด 2.2) น าเลโกมาตอเพอสรางตวแทนความคดโดยท เรมตนสรางตวแทน
ความคดของความเรวทเกดขนแตละชวงเวลาของสถานการณน าเลโก 2 ปมแทนขนาดของความเรวของวตถจากนนน าเลโก 4 ปมสด าตอทปลายเพอแสดงทศของความเรวของวตถทก าลงเคลอนท ดงแสดงในภาพท 3.17
ภาพท 3.17 เลโกความเรวของสถานการณท 4

25
น าตวแทนความคดทไดจากการสรางโดยเลโกไปเขยนลงในชดกจกรรมตรงสวนทเปนพนทวางใหเขยนเลโกแสดงความเรว นกเรยนอาจเลอกเขยนตวแทนความคดเปนเลโกหรอเวกเตอรลงในชดกจกรรมขนอยกบความถนดสวนบคคล ดงแสดงในภาพท 3.18
1v 2v 3v
ภาพท 3.18 ตวแทนความคดของความเรวฝนสถานการณท 4
2.3) น าเลโกมาตอเพอสรางตวแทนความคดของความเรงทเกดขนแตละชวงเวลาของสถานการณน าเลโก 2 ปมแทนขนาดของความเรงของวตถจากนนน าเลโก 4 ปมสแดงตอทปลายเพอแสดงทศของความเรงของวตถทก าลงเคลอนท โดยความเรงทเกดขนเปนการเปลยนแปลง ความเรวในหนงหนวยเวลา ฉะนนเราสามารถหาความเรงทเกดขนจากความเรวปลายลบความเรวตน ดงแสดงในภาพท 3.19
ภาพท 3.19 เลโกความเรงของสถานการณท 4 น าตวแทนความคดทไดจากการสรางโดยเลโกไปเขยนลงในชด
กจกรรมตรงสวนทเปนพนทวางใหเขยนเลโกแสดงความเรง นกเรยนอาจเลอกเขยนตวแทนความคดเปนเลโกหรอเวกเตอรลงในชดกจกรรมขนอยกบความถนดสวนบคคล ดงแสดงในภาพท 3.20
2v 3v
1a 1v 2a
2v ภาพท 3.20 ตวแทนความคดของความเรงในสถานการณท 4
26
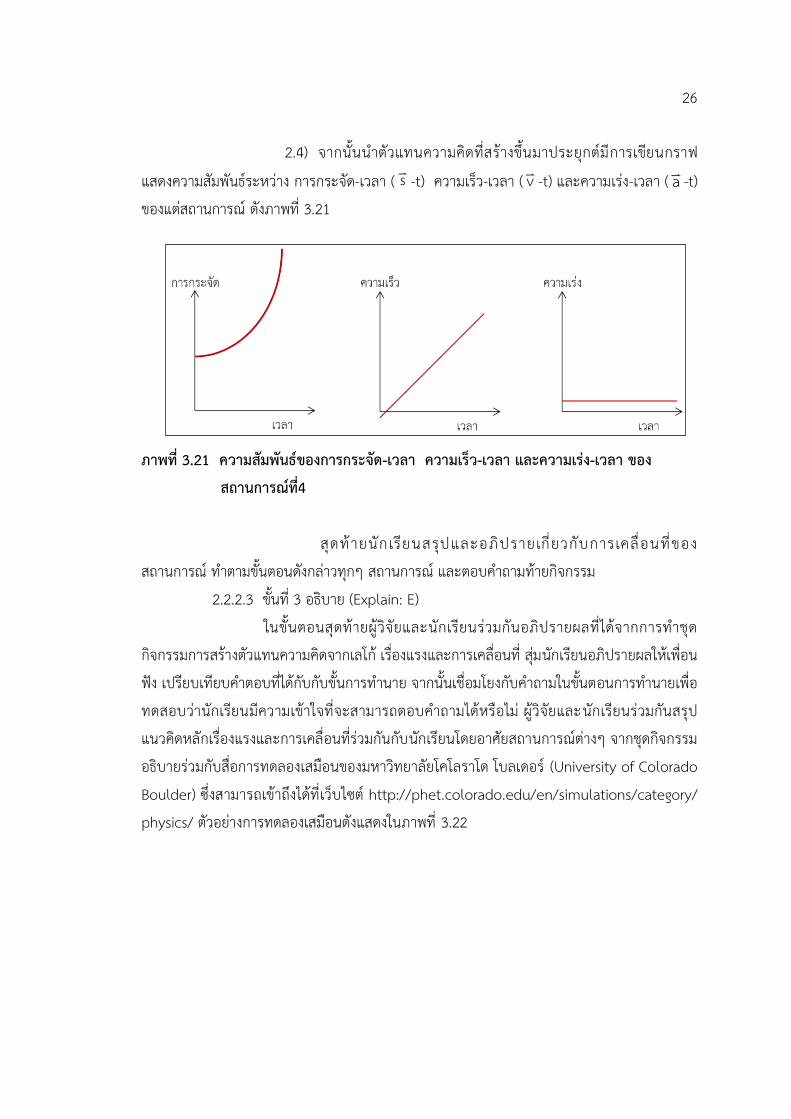
2.4) จากนนน าตวแทนความคดทสรางขนมาประยกตมการเขยนกราฟแสดงความสมพนธระหวาง การกระจด-เวลา ( s -t) ความเรว-เวลา ( v -t) และความเรง-เวลา ( a -t) ของแตสถานการณ ดงภาพท 3.21
ภาพท 3.21 ความสมพนธของการกระจด-เวลา ความเรว-เวลา และความเรง-เวลา ของสถานการณท4
สดท ายนกเรยนสรปและอภปรายเก ยวกบการเคล อนท ของ
สถานการณ ท าตามขนตอนดงกลาวทกๆ สถานการณ และตอบค าถามทายกจกรรม 2.2.2.3 ขนท 3 อธบาย (Explain: E)
ในขนตอนสดทายผวจยและนกเรยนรวมกนอภปรายผลทไดจากการท าชดกจกรรมการสรางตวแทนความคดจากเลโก เรองแรงและการเคลอนท สมนกเรยนอภปรายผลใหเพอนฟง เปรยบเทยบค าตอบทไดกบกบขนการท านาย จากนนเชอมโยงกบค าถามในขนตอนการท านายเพอทดสอบวานกเรยนมความเขาใจทจะสามารถตอบค าถามไดหรอไม ผวจยและนกเรยนรวมกนสรปแนวคดหลกเรองแรงและการเคลอนทรวมกนกบนกเรยนโดยอาศยสถานการณตางๆ จากชดกจกรรมอธบายรวมกบสอการทดลองเสมอนของมหาวทยาลยโคโลราโด โบลเดอร (University of Colorado Boulder) ซงสามารถเขาถงไดทเวบไซต http://phet.colorado.edu/en/simulations/category/ physics/ ตวอยางการทดลองเสมอนดงแสดงในภาพท 3.22

27
ภาพท 3.22 ตวอยางของของมหาวทยาลยโคโลราโด โบลเดอร (University of Colorado Boulder) A. การทดลองเสมอนเรองแรงและการเคลอนทบนพนราบ B. กราฟของแรงบนพนราบ C. การทดลองเสมอนเรองแรงและการเคลอนทบนพนเอยง D. กราฟของแรงบนพนเอยง
หลงจากนน เปดโอกาสใหนกเรยนไดมโอกาสถามประเดนทสงสยเพอใหผวจย
อธบายเพมเตม 3.2.3 ชดกจกรรมการสรางตวแทนความคดจากเลโก เรองแรงและการเคลอนท
ผวจยออกแบบชดกจกรรมการสรางตวแทนความคดจากเลโก ขนโดยปรบปรงมาจาก Describing Motion with Diagrams ของ The Physics Classroom, 2009 สามารถเขาถงไดทเวบไซต http://www.physicsclassroom.com/curriculum/1Dkin ผวจยสรางชดกจกรรมขนมาและผานการตรวจสอบจากอาจารยทปรกษาเพอใหมความนาเชอถอของการวจย (Trustworthiness) มากยงขน จากการตรวจสอบของอาจารยทปรกษาใหเพมสถานการณใหหลากหลายขนใหสอดคลองกบแบบประเมนแนวคด FMCE และมพนทวางใหนกเรยนฝกเขยนตวแทนความคดทเปนเวกเตอรของความเรว ความเรง กราฟแสดงความสมพนธระหวางการกระจด-เวลา ( s -t) ความเรว-เวลา ( v -t)
B
D C
A
28
และความเรง-เวลา ( a -t) ของแตสถานการณ มการฝกตอบค าถามในทายกจกรรม ใชในการจดกจกรรมการเรยนรฟสกสแบบเลโก (ภาคผนวก ก) 3.3 การด าเนนการวจยและเกบขอมล
ในการวจยนแบงขนตอนการวจยออกเปน 3 ขน ดงตอไปน ขนท 1 กอนการด าเนนการวจย ใหนกเรยนท าแบบประเมนแนวคด FMCE จ านวน 33 ขอ เปน
การทดสอบกอนเรยน (Pre-test) ใหเวลาในการท าขอสอบ 1 ชวโมง ขนท 2 ด าเนนการจดกจกรรมการเรยนรเรองแรงการเคลอนทในชนเรยนโดยใชชดกจกรรมการ
สรางตวแทนความคดจากเลโกรวมกบการจดการเรยนรโดยใชวธการจดการเรยนรแบบ POE ใชเวลาในการจดกจกรรม 2 ชวโมง
ขนท 3 หลงการด าเนนการวจย ใหนกเรยนท าแบบประเมนแนวคด FMCE จ านวน 33 ขอ ซงเปนการทดสอบหลงเรยน (Post-test) ใหเวลาในการท าขอสอบ 1 ชวโมง
ขนท 4 ตรวจสอบค าตอบและการเขยนตวแทนความคดของนกเรยนจากการท าแบบประเมนแนวคด FMCE จ านวน 33 ขอ เพอน าผลทไดทงค าตอบและตวแทนความคดทเขยนไปวเคราะหขอมลตอไป 3.4 การวเคราะหขอมล
ผวจยน าขอมลทไดจากการทดลองไปวเคราะหผลดงตอไปน 3.4.1 วเคราะหความเขาใจแนวคด โดยการเปรยบเทยบคาเฉลยของคะแนนจากการท าแบบ
ประเมนแนวคด FMCE กอนเรยนและหลงเรยน ดวยชดการสรางตวแทนความคดจากเลโกเรองแรงและการเคลอนท โดยใชสถตพนฐานคาเฉลยเบยงเบนมาตรฐานและทดสอบดวยสถต t-test ทดสอบความแตกตางทมนยส าคญทางสถตทระดบ.05
3.4.2 วเคราะหความกาวหนาทางการเรยน จากการจดการเรยนรฟสกสแบบเลโกจากการสรางตวแทนความคดดวยเลโก เรองแรงและการเคลอนท โดยใชคา Normalized gain
การวเคราะหความกาวหนาทางการเรยนจะแบงเปน 4 สวน ดงน 3.4.2.1 วเคราะหความกาวหนาทางการเรยนรายชนเรยน 3.4.2.2 วเคราะหความกาวหนาทางการเรยนรายบคคล 3.4.2.3 วเคราะหความกาวหนาทางการเรยนรายแนวคด ซงสามารถจดกลมแบบ
ประเมนแนวคด FMCE เปน 5 แนวคด ดงแสดงในตารางท 2.1

29
ตารางท 3.1 กลมแนวคดค าถามจากแบบประเมนแนวคด FMCE
กลมโจทย ค าถามขอท 1. แรงทกระท าตอเลอน (Force Sled) 1-7 2. การเคลอนทกลบทศทาง (Reversing Direction) 8-13, 27-29 3. กราฟของแรง (Force Graphs) 14-21 4. กราฟของความเรง (Acceleration Graphs) 22-26 5. กราฟของความเรว (Velocity Graphs) 30-33
3.4.2.4 วเคราะหความกาวหนาทางการเรยนรายขอ
3.4.3 วเคราะหตวแทนความคดของนกเรยนแตละแนวคด โดยแบงเปน 2 ขนตอนดงน 3.4.3.1 ขนท 1 น าตวแทนความคดของนกเรยนมาจดกลม 5 กลม ดงน
1) เลโกและเวกเตอร (Lego and vector) 2) เลโก (Lego) 3) เวกเตอร (Vector) 4) กราฟ (Graphs) 5) ไมเขยนหรอเขยนไมเกยวของ (No)
3.4.3.2 ขนท 2 น าตวแทนความคดของนกเรยนแตละกลมมาตรวจสอบความถกตองแบงเปน 4 ระดบ (สทธศกด จนดาวงศ, 2555) ดงน
1) ความเขาใจตวแทนความคดในระดบทสมบ รณ (Complete Multiple Representations: CM) หมายถงตวแทนความคดของนกเรยนเปนค าตอบหรอขอความหรอภาพทนกเรยนเขยนสอความถก พรอมใหเหตผลครบองคประกอบทส าคญของแตละแนวคด
2) ความเขาใจตวแทนความคดในระดบท ไมสมบรณ (Partial Multiple Representations: PM) หมายถงตวแทนความคดของนกเรยนเปนค าตอบหรอขอความหรอภาพทนกเรยนเขยนสอความถก พรอมใหเหตผลถกตองแตขาดองคประกอบบางสวนทส าคญของแตละแนวคด
3) ความเขาใจตวแทนความคดในระดบทคลาดเคลอนบางสวน (Partial Multiple Representations with Specific Alternative Conception: PS) ห ม าย ถ งต ว แ ท นความคดของนกเรยนเปนค าตอบหรอขอความหรอภาพทนกเรยนเขยนสอความถก แตการใหเหตผลบางสวนถกตองและบางสวนไมถกตอง

30
4) ความเขาใจตวแทนความคดในระดบทคลาดเคลอน (Alternative Multiple Representations: AM) หมายถงตวแทนความคดของนกเรยนเปนค าตอบหรอขอความหรอภาพทนกเรยนเขยนสอความผดหรอใหเหตผลไมเกยวของ

31
บทท 4 ผลการวจยและการอภปรายผล
ผลการจดการเรยนรฟสกสแบบเลโกเพอพฒนาแนวคดเรองแรงและการเคลอนท ส าหรบนกเรยน
ชนมธยมศกษาปท 4/5 โรงเรยนประสารวทยาคาร อ าเภอปราสาท จงหวดสรนทร เกบขอมลจากแบบประเมนแนวคด FMCE ดวยคาสถตทดสอบท (t-test) และ Normalized gain <g> แบงผลการวเคราะห 3 ตอน ดงน
4.1 วเคราะหความเขาใจแนวคด 4.2 วเคราะหความกาวหนาทางการเรยน 4.3 วเคราะหตวแทนความคด
4.1 วเคราะหความเขาใจแนวคด
ผลการวเคราะหความแตกตางของคะแนนเฉลยกอนเรยนและหลงเรยนของนกเรยนโดยใชการจดการเรยนรฟสกสแบบเลโกเพอพฒนาแนวคดเรองแรงและการเคลอนท โดยใชแบบประเมนแนวคด FMCE 33 ขอ คดเปน 33 คะแนน ตารางท 4.1 คาเฉลย (Mean) คาเบยงเบนมาตรฐาน (SD) คาสถตทดสอบท (t-test) และระดบ
นยส าคญทางสถตในการทดสอบเปรยบเทยบคะแนนความเขาใจแบบประเมนแนวคด FMCE กอนเรยนและหลงเรยนของนกเรยน 36 คน
การทดสอบ คาเฉลย รอยละ สวนเบยงเบนมาตรฐาน
คาสถตทดสอบท
กอนเรยน 6.36 19.27 2.13 19.27*
หลงเรยน 21.69 65.73 4.11
* มนยส าคญทางสถตระดบ .05
ผลการวเคราะหขอมลจากแบบประเมนแนวคด FMCE เพอเปรยบเทยบคาคะแนนเฉลยกอนเรยนและหลงการจดการเรยนรฟสกสแบบเลโกของนกเรยน ผลปรากฏวา นกเรยนมคะแนนเฉลยกอน

32
เรยนเทากบ 6.36 (SD 2.13) คดเปนรอยละ 19.27 ของคะแนนเตมและคะแนนเฉลยหลงเรยนเทากบ 21.69 (SD 4.11) คดเปนรอยละ 65.73 ของคะแนนเตม โดยคะแนนเฉลยหลงเรยนสงกวาคะแนนเฉลยกอนเรยน 15.33 คดเปนรอยละ 46.46 ของคะแนนเตมและเมอวเคราะหดวย t-test ผลปรากฏวา คะแนนเฉลยหลงจดการเรยนรฟสกสแบบเลโกเรองแรงและการเคลอนทของนกเรยนสงกวาคะแนนเฉลยกอนจดการเรยนรอยางมนยส าคญทางสถตทระดบ .05 ดงตารางท 4.1 แสดงใหเหนวาการจดการเรยนรฟสกสแบบเลโก โดยใชวธการจดการเรยนรแบบ POE รวมกบชดกจกรรมการสรางตวแทนความคดดวยเลโก และอธบายรวมกบการทดลองเสมอนของของมหาวทยาลยโคโลราโด โบลเดอร (University of Colorado Boulder) สามารถพฒนาความเขาใจแนวคดเรองแรงและการเคลอนท เพราะนกเรยนไดลงมอปฏบตจรงโดยการน าเลโกมาสรางเปนตวแทนความคดประกอบกบน าสถานการณทมาจดการเรยนการสอนเกยวของกบชวตประจ าวนของนกเรยนเพอใหนกเรยนเกดความสนใจและงายตอการสรางตวแทนความคด มการจดกจกรรมใหนกเรยนลงมอปฏบตท าใหนกเรยนเกดความกระตอรอรนในการเรยน มาใชกระบวนการกลมท าใหนกเรยนไดแลกเปลยนความคดเหนซงกนและกน มการชวยเหลอซงกนและกนท าใหมความเขาใจแนวคดเรองแรงและการเคลอนทมากขน สอดคลองกบ รจกะ การสข (2554) ไดศกษาเปรยบเทยบความเขาใจในรายวชาฟสกสเรองแรงและการเคลอนทของนกเรยนโดยใชชดกจกรรม POE ผลการวจย พบวา นกเรยนมคะแนนผลสมฤทธทางเรยนเพมขนอยางมนยส าคญทางสถตทระดบ .05 ผลการวจยครงนชใหเหนวา ชดกจกรรม POE เปนวธการสงเสรมใหนกเรยนไดแสดงความเหนและอภปรายเกยวกบแนวคดทางวทยาศาสตร ฝกใหนกเรยนไดมกระบวนการท างานเปนกลม รบฟงความคดเหนของเพอนนกเรยน สงเสรมใหนกเรยนกลาแสดงออกในการเสนอความคดและอภปรายอกดวย สอดคลองกบ วนชา ประยรพนธ (2554) ไดศกษาผลสมฤทธทางการเรยนของนกเรยนในกระบวนการเรยนรวธ POE ในรายวชาวทยาศาสตร เรอง แรงและการเคลอนท ผลการวจย พบวา นกเรยนมผลสมฤทธทางการเรยนสงขน โดยมคะแนนเฉลยหลงเรยนสงกวาคะแนนเฉลยกอนเรยน และสงเสรมการสรางความรดวยตนเอง สอดคลองกบ Rakkapao, S. et al., (2014) ไดศกษาการสงเสรมใหนกศกษามความเขาใจเรองแรงและการเคลอนททถกตองมากขนโดยอาศยวธการสอนแบบ POE พบวา หลงเรยนโดยเฉลยนกศกษามผลการเรยนรเพมขน ผลการทดลองชใหเหนวา ภาพรวมวธการสอนแบบ POE กระตนใหเกดการเรยนรเรองแรงและการเคลอนทมากขน 4.2 วเคราะหความกาวหนาทางการเรยน
ความกาวหนาทางการเรยนโดยใชสถต Normalized gain <g> แบง 4 สวน ดงน 4.2.1 ความกาวหนาทางการเรยนรายชนเรยน (Class normalized gain)
33
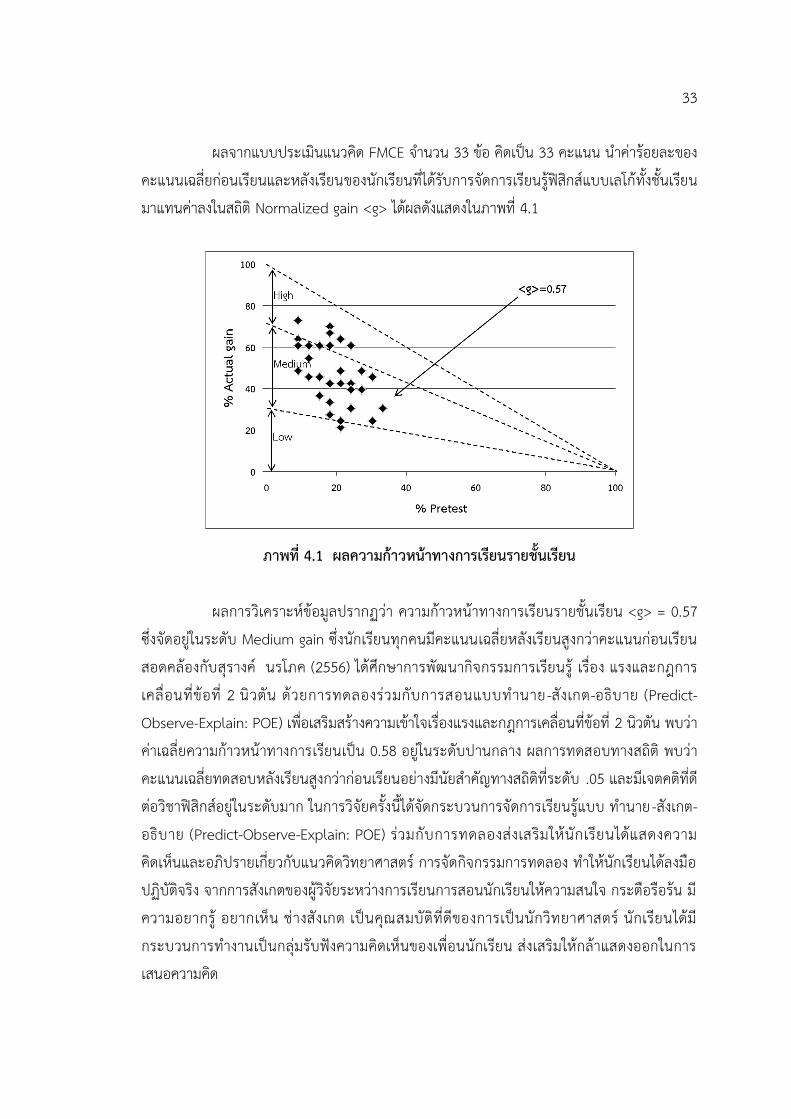
ผลจากแบบประเมนแนวคด FMCE จ านวน 33 ขอ คดเปน 33 คะแนน น าคารอยละของคะแนนเฉลยกอนเรยนและหลงเรยนของนกเรยนทไดรบการจดการเรยนรฟสกสแบบเลโกทงชนเรยนมาแทนคาลงในสถต Normalized gain <g> ไดผลดงแสดงในภาพท 4.1
ภาพท 4.1 ผลความกาวหนาทางการเรยนรายชนเรยน
ผลการวเคราะหขอมลปรากฏวา ความกาวหนาทางการเรยนรายชนเรยน <g> = 0.57 ซงจดอยในระดบ Medium gain ซงนกเรยนทกคนมคะแนนเฉลยหลงเรยนสงกวาคะแนนกอนเรยน สอดคลองกบสรางค นรโภค (2556) ไดศกษาการพฒนากจกรรมการเรยนร เรอง แรงและกฎการเคลอนทขอท 2 นวตน ดวยการทดลองรวมกบการสอนแบบท านาย -สงเกต-อธบาย (Predict-Observe-Explain: POE) เพอเสรมสรางความเขาใจเรองแรงและกฎการเคลอนทขอท 2 นวตน พบวา คาเฉลยความกาวหนาทางการเรยนเปน 0.58 อยในระดบปานกลาง ผลการทดสอบทางสถต พบวาคะแนนเฉลยทดสอบหลงเรยนสงกวากอนเรยนอยางมนยส าคญทางสถตทระดบ .05 และมเจตคตทดตอวชาฟสกสอยในระดบมาก ในการวจยครงนไดจดกระบวนการจดการเรยนรแบบ ท านาย -สงเกต-อธบาย (Predict-Observe-Explain: POE) รวมกบการทดลองสงเสรมใหนกเรยนไดแสดงความคดเหนและอภปรายเกยวกบแนวคดวทยาศาสตร การจดกจกรรมการทดลอง ท าใหนกเรยนไดลงมอปฏบตจรง จากการสงเกตของผวจยระหวางการเรยนการสอนนกเรยนใหความสนใจ กระตอรอรน มความอยากร อยากเหน ชางสงเกต เปนคณสมบตทดของการเปนนกวทยาศาสตร นกเรยนไดมกระบวนการท างานเปนกลมรบฟงความคดเหนของเพอนนกเรยน สงเสรมใหกลาแสดงออกในการเสนอความคด

34
4.2.2 ความกาวหนาทางการเรยนรายบคคล (Single student normalized gain) ผลจากแบบประเมนแนวคด FMCE น าคารอยละของคะแนนเฉลยกอนเรยนและหลง
เรยนของนกเรยนทไดรบการจดการเรยนรฟสกสแบบเลโกแตละคนมาแทนคาลงในสถต Normalized gain <g> ไดผลดงแสดงในภาพท 4.2
ภาพท 4.2 ผลความกาวหนาทางการเรยนรายบคคล
ผลการวเคราะหขอมลปรากฏวา ความกาวหนาทางการเรยนรายบคคลของนกเรยนแตละคนอยในชวง <g> = 0.27-0.85 โดยมนกเรยนทมความกาวหนาทางการเรยนระดบ Low gain 1 คน คอ คนท 10 มความกาวหนาทางการเรยนระดบ Medium gain 25 คน คอ คนท 2, 4, 5, 6, 10, 12, 13, 14, 15, 16, 17, 20, 21, 23, 25, 26, 27, 29, 30, 31, 32, 33, 34, 35 และ 36 มความกาวหนาทางการเรยนระดบ High gain 10 คน คดเปนรอยละ 27.78 คอ คนท 1, 3, 8, 9, 11, 18, 19, 22, 24 และ 28
นกเรยนทมความกาวหนาทางการเรยนทสงทสด <g> = 0.85 จดอยในระดบ High gain คอ นกเรยนคนท 11 ซงผวจยตรวจสอบวเคราะหจากการเขยนตวแทนความคดของนกเรยน พบวา นกเรยนสรางตวแทนความคดเปนขนตอนดงน (1) เขยนตวแทนความคดทเปนเลโกแสดงความเรวของการเคลอนทในแตละสถานการณ (2) เขยนตวแทนความคดทเปนเวกเตอรของความเรวในการเคลอนท (3) เขยนตวแทนความคดทเปนเวกเตอรของความเรงทเกดขน นกเรยนสรางตวแทนความคดเพอเพมความเขาใจในการท าแบบประเมนในทกขอและในสวนของกลมค าถามทเกยวของกบการเขยนกราฟนกเรยนกสรางตวแทนความคดทเปนเลโกและเวกเตอร กอนทจะน าแนวคดทไดไปเขยนกราฟ

35
ตอไป จงสงผลใหนกเรยนคนน มคะแนนสงสด คอ 29 คะแนน คดเปนรอยละ 87.88 และมความกาวหนาทางการเรยนสงทสด สวนนกเรยนทมความกาวหนาทางการเรยนต าทสด <g> = 0.27 จดอยในระดบ Low gain คอ นกเรยนคนท 10 ซงเปนนกเรยนทเขยนตวแทนความคดสวนใหญมความคลาดเคลอนและบางขอไมเขยนตวแทนความคดสงผลใหนกเรยนคนนมความเขาใจแนวคดทผดและมความกาวหนาทางการเรยนต าทสด
4.2.3 ความกาวหนาทางการเรยนรายแนวคด (Conceptual dimensional normalized gain)
ผลจากแบบประเมนแนวคด FMCE น าคารอยละของคะแนนเฉลยกอนเรยนและหลงเรยนของนกเรยนทง 5 แนวคด คอ 1) Force Sled 2) Reversing Direction 3) Force Graphs 4) Acceleration Graphs และ 5) Velocity Graphs มาแทนคาลงในสถต Normalized gain ไดผลดงแสดงในภาพท 4.3
ภาพท 4.3 ผลความกาวหนาทางการเรยนรายแนวคด
ผลการวเคราะหขอมลปรากฏวา แนวคดทมความกาวหนาทางการเรยนอยในระดบ High
gain 1 แนวคด คอ Force Sled แนวคดทมความกาวหนาทางการเรยนอยในระดบ Medium gain 4 แนวคด คอ 1) Reversing Direction 2) Force Graphs 3) Acceleration Graphs และ 4) Velocity Graphs
แนวคดทนกเรยนมระดบความกาวหนาทางการเรยนสงสด <g> = 0.75 จดอยในระดบ High gain คอ Force Sled เนองจากกลมค าถามมลกษณะของแนวคดทถามตรงไปตรงมาเกยวของกบการหาแรงสทธ ทกระท าตอเลอน ซงนกเรยนทสามารถหาบอกไดวาแรงสทธทกระท ากบเลอนเปนแปรผนตรงกบความเรง และชดกจกรรมการสรางตวแทนความคดจากเลโกไดครอบคลมแนวคดเรองน
36
และผวจยก าหนดสถานการทเกยวของมาเปนจ านวนมากนกเรยนจงสามารถน าความรเกยวกบการสรางตวแทนความคดทจากชดกจกรรมไปประยกตใชในการพฒนาความเขาใจแนวคด ซงมผลท าใหสามารถหาค าตอบทถกตองได สวนแนวคดทนกเรยนมความกาวหนาทางการเรยนต าสด <g> = 0.48 จดอยในระดบ Medium gain คอ Force Graphs เนองจากในชดกจกรรมการสรางตวแทนความคดไมไดฝกใหนกเรยนเขยนกราฟแสดงความสมพนธระหวางแรงกบเวลา ม เฉพาะกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา และความเรงกบเวลา นกเรยนบางสวน ไมสามารถประยกตไดท าใหเกดความเขาใจแนวคดทคลาดเคลอนสงผลใหนกเรยนมความกาวหนาทางการเรยนต าทสด
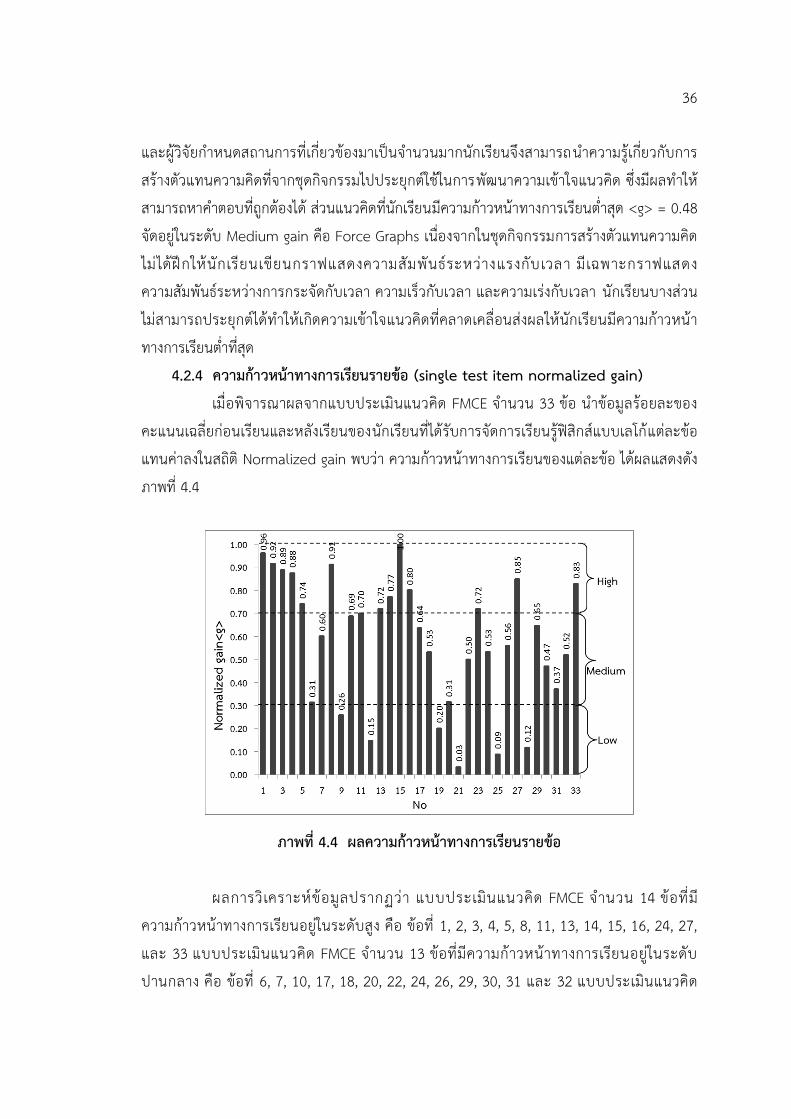
4.2.4 ความกาวหนาทางการเรยนรายขอ (single test item normalized gain) เมอพจารณาผลจากแบบประเมนแนวคด FMCE จ านวน 33 ขอ น าขอมลรอยละของ
คะแนนเฉลยกอนเรยนและหลงเรยนของนกเรยนทไดรบการจดการเรยนรฟสกสแบบเลโกแตละขอแทนคาลงในสถต Normalized gain พบวา ความกาวหนาทางการเรยนของแตละขอ ไดผลแสดงดงภาพท 4.4
ภาพท 4.4 ผลความกาวหนาทางการเรยนรายขอ
ผลการวเคราะหขอมลปรากฏวา แบบประเมนแนวคด FMCE จ านวน 14 ขอทมความกาวหนาทางการเรยนอยในระดบสง คอ ขอท 1, 2, 3, 4, 5, 8, 11, 13, 14, 15, 16, 24, 27, และ 33 แบบประเมนแนวคด FMCE จ านวน 13 ขอทมความกาวหนาทางการเรยนอยในระดบ ปานกลาง คอ ขอท 6, 7, 10, 17, 18, 20, 22, 24, 26, 29, 30, 31 และ 32 แบบประเมนแนวคด
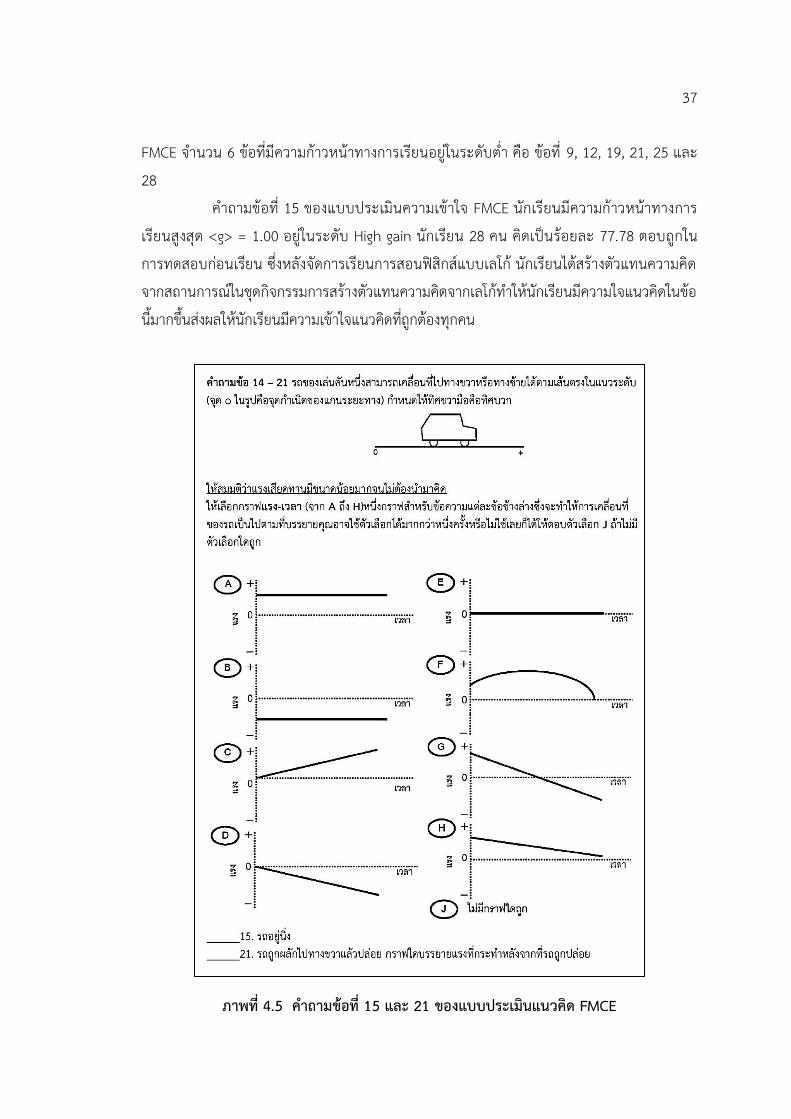
37
FMCE จ านวน 6 ขอทมความกาวหนาทางการเรยนอยในระดบต า คอ ขอท 9, 12, 19, 21, 25 และ 28
ค าถามขอท 15 ของแบบประเมนความเขาใจ FMCE นกเรยนมความกาวหนาทางการเรยนสงสด <g> = 1.00 อยในระดบ High gain นกเรยน 28 คน คดเปนรอยละ 77.78 ตอบถกในการทดสอบกอนเรยน ซงหลงจดการเรยนการสอนฟสกสแบบเลโก นกเรยนไดสรางตวแทนความคดจากสถานการณในชดกจกรรมการสรางตวแทนความคดจากเลโกท าใหนกเรยนมความใจแนวคดในขอนมากขนสงผลใหนกเรยนมความเขาใจแนวคดทถกตองทกคน
ภาพท 4.5 ค าถามขอท 15 และ 21 ของแบบประเมนแนวคด FMCE

38
พจารณาขอท 15 ดงแสดงในภาพท 4.5 เปนค าถามทเกยวของกบแรงทกระท าตอรถทหยดนงซงงายตอความเขาใจแนวคด จากการพจารณาการสรางตวแทนความคดของนกเรยน รถทหยดนงคอรถทไมมการเคลอนทแสดงวารถไมมความเรง จากกฎขอท 2 ของนวตน ความเรงของวตถจะแปรผนตรงและมทศเดยวกบแรงลพธทกระท าตอวตถและแปรผกผนกบมวลของวตถ รถไมมความเรงแสดงวาแรงลพธทกระท ากบรถมคาเทากบศนย จงเลอกตอบตวเลอก E ซงเปนกราฟเสนตรงอยบนแกน x หมายถง แรงลพธทกระท ากบรถมคาเทากบศนยหรอไมมแรงกระท ากบรถ สอดคลองกบ มารนา ตาเตอด (2556) ไดศกษาการประเมนความเขาใจเกยวกบความคดรวบยอดเรองแรงและการเคลอนท เพอใชเปนแนวทางในการจดการเรยนการสอน โดยใชแบบประเมนความเขาใจเกยวกบความคดรวบยอดเรองแรงและการเคลอนท (The Force and Motion Conceptual Evaluation: FMCE) ขอ ซงพฒนาโดย Ronald K. Thornton แหง Tufts University และ David R. Sokoloff แหง University of Oregon ประเทศสหรฐอเมรกา พบวา นกเรยนมความสามารถในการท าขอสอบ FMCE ในแตละกลมโจทย (cluster) ไดไมแตกตางกน โดยกลมโจทยทท าคะแนนไดมากทสด คอ velocity graphs (รอยละ 38.41) และกลมโจทยทท าคะแนนไดนอยทสด คอ reversing direction (รอยละ 10.00) และยงพบอกวา แบบประเมนขอทมนกเรยนตอบถกมากทสด คอ ขอท 15 (รอยละ 79.23) และขอทมนกเรยนตอบถกนอยทสด คอ ขอท 3 (รอยละ 1.50) โดยกลมโจทยทท าคะแนนไดมากทสด คอ velocity graphs (รอยละ 41.96) และกลมโจทยทท าคะแนนไดนอยทสด คอ reversing direction (รอยละ 8.44) จากการสมภาษณนกเรยนใหเหตผลในการตอบวา ไมสามารถเชอมโยงความสมพนธระหวางความเรงกบทศการเคลอนทและความสมพนธระหวางแรงกบทศการเคลอนทได
ค าถามขอท 21 ดงแสดงในภาพท 4.5 นกเรยนมความกาวหนาทางการเรยนต าสด <g> = 0.03 อยในระดบ Low gain เปนค าถามทเกยวของกบแรงทกระท ากบรถถกผลกไปทางขวาแลวปลอย นกเรยนนกเรยน 30 คน คดเปนรอยละ 83.33 มความเขาใจคลาดเคลอนวาออกแรงผลกรถไปทางขวาแลวปลอย รถจะเคลอนทไปทางขวาชาลงซงในการจดการเรยนรขนท านายน ารถสาธตมาผลกใหนกเรยนท านาย การเคลอนทหนาชนเรยน พบวา รถจะเคลอนทไปทางขวาชาลงเนองจากมแรงเสยดทาน นกเรยนสวนใหญตอบตวเลอก B แตค าถามขอน สมมตวาแรงเสยดทานมขนาดนอยมากจนไมตองน ามาคด แสดงวารถก าลงเคลอนทไปดานขวาดวยความเรวคงท รถไมมความเรง แสดงวาแรงลพธทกระท าตอรถมคาเทากบศนย ตวเลอก E ซงเปนกราฟเสนตรงอยบนแกน x เปนค าตอบทถกตอง 4.3 วเคราะหตวแทนความคดของนกเรยน
ผลของการวเคราะหตวแทนความคดของนกเรยนหลงไดรบการจดการเรยนรฟสกสแบบเลโก เพอพฒนาแนวคดเรองแรงและการเคลอนท ของ 5 แนวคด คอ 1) Force Sled 2) Reversing

39
Direction 3) Force Graphs 4) Acceleration Graphs และ 5) Velocity Graphs ไดผลดงแสดงในภาพท 4.6
ภาพท 4.6 ผลการจดกลมและตรวจสอบความถกตองในการใชตวแทนความคดของแนวคด A. Force Sled B. et al.
จากการวเคราะหแนวคด Force Sled ตวแทนความคดของนกเรยนทใชจากมากไปนอย คอ
Lego and vector Vector และ No คดเปนรอยละ 79, 21, และ 1 ตามล าดบ แนวคด Reversing Direction ตวแทนความคดของนกเรยนทใชจากมากไปนอย คอ Lego and vector Lego Vector และ No คดเปนรอยละ 61, 12, 8 และ 19 ตามล าดบ แนวคด Force Graphs, Acceleration Graphs และ Velocity Graphs ใชตวแทนความคด Graphs ทงหมด จากการพจารณาตวแทน

40
ความคดทนกเรยนเขยนไดถกตองสงผลใหนกเรยนเลอกค าตอบถก แสดงใหเหนวา นกเรยนตองมตวแทนความคดทถกตองจงจะสามารถแกโจทยทางฟสกสไดอยางถกตอง
แนวคดทสามารถเขยนตวแทนความคดไดมความกาวหนาทางการเรยนสงทสด คอ Force Sled ตวแทนความคดทใช 2 กลม คอ Lego and vector และ Vector ดงแสดงในภาพท 4.6A พบวา ตวแทนความคด Lego and vector นกเรยนมความเขาใจตวแทนความคดในระดบทสมบรณ (CM) รอยละ 48 มความเขาใจตวแทนความคดในระดบไมสมบรณ (PM) รอยละ 29 มความเขาใจตวแทนความคดในระดบคลาดเคลอนบางสวน (PS) รอยละ 2 ตวแทนความคด vector นกเรยนมความเขาใจตวแทนความคดในระดบทสมบรณ (CM) รอยละ 13 มความเขาใจตวแทนความคดในระดบไมสมบรณ (PM) รอยละ 6 มความเขาใจตวแทนความคดในระดบคลาดเคลอนบางสวน (PS) รอยละ 2 นกเรยนทเขยนตวแทนความคดทถกตอง คอ CM และ PM ของแนวคด Force Sled คดเปนรอยละ ในกลมแนวคดเรอง Force Sled มตวอยางแนวคดนกเรยน ดงแสดงในภาพท 4.7
ภาพท 4.7 ตวอยางการเขยนตวแทนความคดของแนวคด Force Sled A. นกคนท 8 B. นกเรยนคนท 11
41
นกเรยนทงสองคนมเขยนตวแทนความคดเพอใชเปนขนตอนในการหาค าตอบโดยนกเรยนคนท 8 เขยนตวแทนความคด Vector เปนตวแทนความคดในระดบทสมบรณ (CM) ขนท 1 เขยนตวแทนความคด Vector ของความเรวในสถานการณของค าถามขอท 1 ดงแสดงในรปท 4.7A ไดแก 1v , 2v และ 3v ขนท 2 หาความเรงของการเคลอนทโดยหาจาก 1a = 2v - 1v และ 2a = 3v - 2v จะไดความเรงชวงท 1 ทมขนาด 1 หนวยและมทศไปทางขวา ความเรงชวงท 2 ทมขนาด 1 หนวยและมทศไปทางขวา ทงสองชวงมขนาดของความเรงเทากนแสดงวาความเรงมขนาดคงทและมทศทางไปทางขวา จากกฎขอท 2 ของนวตนจะไดวา แรงกทขนาดคงท หนวยทศไปทางขวา ค าตอบขอนตรงกบตวเลอก B แรงมทศไปทางขวาและมขนาดทคงตว นกเรยนคนท 11 มการเขยนตวแทนความคด Lego and vector เปนตวแทนความคดในระดบทสมบรณ (CM) ขนท 1 เขยนตวแทนความคด Lego ของความเรวในสถานการณของค าถามขอท 1 ดงแสดงในภาพท 4.7B ขนท 2 เขยนตวแทนความคด Vector ของความเรว ไดแก 1v 2v และ 3v ขนท 3 หาความเรงของการเคลอนทโดยหาจาก 1a = 2v
- 1v และ 2a = 3v - 2v ลกษณะเดยวกนกบนกเรยนคนท 8 จากการพจารณา พบวา นกเรยนทงสองคนสามารถเลอกค าตอบของค าถามขอท 1 ไดถกตอง แตนกเรยนคนท 8 มกระบวนการคดทเรวขนเนองจากไมเขยนตวแทนความคด Lego เปนกระบวนการคดเชนเดยวกบการท าชดกจกรรมการสรางตวแทนความคดจากเลโก แตนกเรยนคนท 11 สรางตวแทนความคดเปนขนโดยเพมกระบวนการตอ เลโกเชนเดยวกบการท ากจกรรมการเรยนรฟสกสแบบเลโกท าใหเพมความรอบคอบ แมนย าในการคดสงผลใหนกเรยนคนท 11 มคะแนนหลงเรยนสงทสด
เมอน าผลของการตรวจสอบตวแทนความคดไปเปรยบเทยบกบความกาวหนาทางการเรยนของแตละกลมแนวคด พบวา มแนวโนมในทางเดยวกน นกเรยนทเขยนตวแทนความคดถกตองสงผลใหนกเรยนเลอกค าตอบไดถกตอง นอกจากนมนกเรยนสามารถเขยนตวแทนความคดไดแตไมสามารถเลอกค าตอบทถกตองไดเนองจากค าบรรยายของค าตอบในแบบประเมนแนวคด FMCE บางขอซบซอนท าใหนกเรยนไมสามารถตความไดจงท าใหนกเรยนไมสามารถเลอกค าตอบทถกตองได การเขยนตวแทนความคดของนกเรยนทไดจากเลโกชวยฝกใหนกเรยนพฒนาความเขาใจแนวคด เพมมากขน
แนวคดทสามารถเขยนตวแทนความคดไดมความกาวหนาทางการเรยนสงทสด คอ Force Graphs ตวแทนความคดทใช คอ Graphs ดงแสดงในภาพท 4.6C พบวา ตวแทนความคด Graphs นกเรยนมความเขาใจตวแทนความคดในระดบทสมบรณ (CM) รอยละ 62 มความเขาใจตวแทนความคดในระดบคลาดเคลอน (AM) รอยละ 38 ในกลมแนวคดเรอง Force Graphs มตวอยางแนวคดนกเรยนดงแสดงในภาพท 4.8

42
ภาพท 4.8 ตวอยางการเขยนตวแทนความคดของแนวคด Force Graphs A. นกคนท 8 B.นกเรยนคนท 11
A B
43
นกเรยนทงสองคนมเขยนตวแทนความคดเพอใชเปนขนตอนในการหาค าตอบโดยนกเรยนคนท 8 เขยนตวแทนความคด Graphs เปนตวแทนความคดในระดบทคลาดเคลอน (AM) ซงเขยนกราฟตามตวเลอกทนกเรยนเลอกตอบดงแสดงในภาพท 4.8A สวนนกเรยนคนท 11 เขยนตวแทนความคด Graphs เปนตวแทนความคดในระดบทสมบรณ (CM) ขนท 1 เขยนตวแทนความคด Lego ของความเรวในสถานการณของค าถามขอท 14 ดงแสดงในภาพท 4.8B ขนท 2 เขยนตวแทนความคด Vector ของความเรว ไดแก 1v 2v และ 3v ขนท 3 หาความเรงของการเคลอนทโดยหาจาก 1a = 2v
- 1v และ 2a = 3v - 2v ความเรงชวงท 1 มคาเปนศนย และความเรงชวงท 2 มคาเปนศนย ทงสองชวงไมมความเรง จากกฎขอท 2 ของนวตนจะไดวา ไมมแรง ขนท 4 น าผลทไดไปเขยนกราฟแสดงความสมพนธระหวางแรงกบเวลา ค าตอบขอท 14 ตรงกบตวเลอก E
ผลการศกษาตวแทนความคด พบวา หลงการจดการเรยนรฟสกสแบบเลโกเรองแรงและการเคลอนท โดยใชวธการจดการเรยนรแบบ POE รวมกบชดกจกรรมการสรางตวแทนความคดจากเลโก นกเรยนมตวแทนความคดสวนใหญทนกเรยนแสดงออกมามความแตกตางกน นกเรยนสวนใหญมตวแทนความคดทใกลเคยงกบตวแทนความคดวทยาศาสตร เนองจากนกเรยนมประสบการณและองคความรทตางกน โดยนกเรยนน าความรทไดจากประสบการณและความรเดมของนกเรยนเพออธบายและคาดเดาสงทเกดขน ในขนตอนการหาค าตอบนกเรยนไดลงมอสรางตวแทนความคดจากเลโก นกเรยนรจกคดวางแผนแกปญหาเพอหาค าตอบของสถานการณทก าหนดใหและประยกตใชความรอธบายเหตการณอนได สงกรานต มลศรแกว (2554) สอดคลองกบ สงกรานต มลศรแกว (2554) ไดศกษาตวแทนความคด เรอง ของไหล บนพนฐานของทฤษฎคอนสตรคตวสต โดยใชรปแบบการสอนแบบ-ท านาย-สงเกต-อธบาย พบวา นกเรยนมตวแทนความคดทแสดงออกแตกตางกน แตหลงจากการจดกจกรรมการเรยนการสอนโดยวธ POE ในภาพรวมนกเรยนมตวแทนความคดทแสดงออกมาไดใกลเคยงกบตวแทนความคดทางวทยาศาสตร สอดคลองกบ สลลทพย พรมยอง (2556) ไดศกษาตวแทนความคดเรองไฟฟา กอนและหลงไดรบการจดกจกรรมการเรยนการสอนโดยวธ ท านาย -สงเกต-อธบาย (POE) พบวา นกเรยนมตวแทนความคดกอนเรยนแตกตางกนและสวนใหญ ไมสอดคลองกบตวแทนความคดของนกวทยาศาสตรในหวขอนนๆ แตเม อผานการจดกจกรรมการเรยนการสอนโดยใชวธ POE พบวา นกเรยนไดพฒนามโนมตทสอดคลองกบตวแทนความคดของนกวทยาศาสตรเพมขนอยางเหนไดชดเปนผลใหตวแทนความคดหลงเรยนของนกเรยนมความแตกตางกนนอยลงและนกเรยนสวนใหญมตวแทนความคดทสอดคลองกบตวแทนความคดของนกวทยาศาสตร ลลตา สารสวรรณ (2556) ไดศกษาตวแทนความคด เรอง งานและพลงงานโดยใชวธการจดการเรยนรแบบท านาย-สงเกต-อธบาย พบวา นกเรยนมตวแทนความคดทใชอธบาย เรอง งานและพลงงาน กอนการจดการเรยนรและหลงการจดการเรยนรแตกตางกน โดยหลงจากการจดการเรยนรดวยวธการจดการเรยนรแบบ POE ในภาพรวมนกเรยนมจ านวนแบบของตวแทนความคดนอยลง ตวแทน

44
ความคดหลงการจดการเรยนรทนกเรยนสวนใหญแสดงออกมาใกลเคยงกบตวแทนความคดทางวทยาศาสตร ทไดรบการเชอถอในปจจบนมากขน
45
บทท 5 สรปผลการวจย และขอเสนอแนะ
จากผลการวจยการจดการเรยนรฟสกสแบบเลโกเพอพฒนาแนวคดเรองแรงและการเคลอนท
ส าหรบนกเรยนชนมธยมศกษาปท 4/5 โรงเรยนประสาทวทยาคาร อ าเภอปราสาท จงหวดสรนทร ท าการเกบขอมลโดยใชแบบประเมนความเขาใจ FMCE วเคราะหผลดวยคาสถตทดสอบท (t-test) และ Normalized gain <g>และวเคราะหตวแทนความคดดวยการจดกลมตวแทนความคดทใช สรปผลการวจยไดดงน
5.1 สรปผลการวจย
5.1.1 เปรยบเทยบคะแนนกอนเรยนและหลงเรยน นกเรยนมคะแนนเฉลยกอนเรยนเทากบ 6.36 (SD 2.13) และคะแนนเฉลยหลงเรยน
เทากบ 21.69 (SD 4.11) โดยคะแนนเฉลยกอนเรยนสงกวาคะแนนเฉลยหลงเรยน 15.33 คดเปน รอยละ 46.46 และเมอวเคราะหดวย t-test พบวา คะแนนเฉลยหลงเรยนสงกวาคะแนนเฉลยกอนเรยน t = 19.27 อยางมนยส าคญทางสถตทระดบ .05 ผลการทดลองชใหเหนวา การจดการเรยนรฟสกสแบบเลโกชวยพฒนาความเขาใจแนวคดเรองแรงและการเคลอนทเพมขน
5.1.2 ความกาวหนาทางการเรยน 5.1.2.1 ความกาวหนาทางการเรยนรายชนเรยน <g> 0.57 ซงจดอยในระดบ Medium
gainนกเรยนทกคนมรอยละคะแนนเฉลยหลงเรยนสงกวากอนเรยน 5.1.2.2 ความกาวหนาทางการเรยนรายบคคลอยในชวง <g>=0.27-0.85 โดยมนกเรยน
ทมความกาวหนาทางการเรยนระดบ Low gain 1 คน คอ คนท 10 มความกาวหนาทางการเรยนระดบ Medium gain 25 คน คอ คนท 2, 4, 5, 6, 10, 12, 13, 14, 15, 16, 17, 20, 21, 23, 25, 26, 27, 29, 30, 31, 32, 33, 34, 35 และ 36 มความกาวหนาทางการเรยนระดบ High gain 10 คน คดเปนรอยละ 27.78 คอ คนท 1, 3, 8, 9, 11, 18, 19, 22, 24 และ 28 นกเรยนทมความกาวหนาทางการเรยนทสงทสด <g> = 0.85 จดอยในระดบ High gain คอ นกเรยนคนท 11 และนกเรยนทมความกาวหนาทางการเรยนต าทสด <g> = 0.27 จดอยในระดบ Low gain คอ นกเรยนคนท 10
5.1.2.3 แนวคดทมความกาวหนาทางการเรยนอยในระดบ High gain 1 แนวคด คอ Force Sled แนวคดทมความกาวหนาทางการเรยนอย ในระดบ Medium gain 4 แนวคด คอ 1) Reversing Direction 2) Force Graphs 3) Acceleration Graphs และ 4) Velocity Graphs

46
แนวคดทนกเรยนมระดบความกาวหนาทางการเรยนสงสด <g> = 0.75 จดอยในระดบ High gain คอ Force Sled แนวคดทนกเรยนมความกาวหนาทางการเรยนต าสด <g> = 0.48 จดอยในระดบ Medium gain คอ Force Graphs
5.1.3 ตวแทนความคด แนวคด Force Sled ตวแทนความคดของนกเรยนทใชจากมากไปนอย คอ Lego and
vector Vector และ No คดเปนรอยละ 79, 21, และ 1 ตามล าดบ แนวคด Reversing Direction ตวแทนความคดของนกเรยนทใชจากมากไปนอย คอ Lego and vector Lego Vector และ No คดเปนรอยละ 61, 12, 8 และ 19 ตามล าดบ แนวคด Force Graphs Acceleration Graphs และ Velocity Graphs ใชตวแทนความคด Graphs ทงหมดเพอน ามาใชในการแกโจทยของแบบประเมนแนวคด FMCE นกเรยนทใชตวแทนความคดในกระบวนการคดโจทยชวยใหนกเรยนมความเขาใจแนวคดเรองและการเคลอนทมากขน 5.2 ขอเสนอแนะ
5.2.1 นกเรยนไมสามารถคดโจทยค าถามของแบบแระเมนแนวคด FMCE ทเกยวของกบการหาแรงและความเรงของการโยนวตถขนทจดสงสดไดเนองจาก นกเรยนสวนใหญมความรเดมทวา จดสงสดมความเรวเปนศนย นกเรยนจงคดวาแรงและความเรงทจดสงสดเปนศนยเชนกน ดงนนในการจดการเรยนการสอนครงตอไปควรเนนทจดความเรงสงสดใหเปนอยางด
5.2.2 ตวแทนความคดสวนใหญทนกเรยนไดลงมอท าในกจกรรมการจดการเรยนรฟสกสแบบเลโก นกเรยนสามารถท าไดดแตเมอนกเรยนไดลงมอแบบประเมนแนวคด FMCE ปรากฏวานกเรยน ไมสามารถตความของสถานการณบางสวนไดจงท าใหนกเรยนไมมความเขาใจแนวคดเนองจากแบบประเมนแนวคด FMCE ตวแทนความคดทนกเรยนเขาใจยากคอตวแทนความคดทเปนขอความบรรยาย ดงนนในการจดการเรยนการสอนครงตอไปควรฝกใหนกเรยนตความจากขอความทเปนนามธรรมใหเปนรปธรรมเพอเพมความเขาใจแนวคด
5.2.3 การจดกจกรรมการเรยนรใหนกเรยนไดเรยนรจากตวแทนความคด เปนการจ ากดตวแทนความคดดวยเลโกซงมราคาแพง ในการจดการเรยนการสอนครงตอไปเราอาจจะใชตวแทนความคดอนทมราราคาถกมาเปนตวแทนความบางอาจจะแทนตวส งทอยรอบตวเรา เชน ตดกระดาษคดแถบแมเหลก เปนตน และผวจยหวงวา ตวแทนความคดทดทสดคอตวแทนความคดทนกเรยนสามารถสรางออกมาเปนชนงานได
5.2.4 แบบประเมนแนวคด FMCE ท ใชเปนแบบทดสอบทไดมาตรฐาน และใชกนอยาง แพรหลายในระดบอดมศกษา ดงนนนกเรยนจงไดคะแนนในการท าแบบประเมนนอย

47
เอกสารอางอง

48
เอกสารอางอง
เกยรตมณ บารงไร. การพฒนามโนมตทางวทยาศาสตร เรองแรงและการเคลอนทของนกเรยน
ชนมธยมศกษาชนปท 1 ดวยกจกรรมการเรยนรแบบ Predict-Observe-Explain
(POE). วทยานพนธปรญญาการศกษามหาบณฑต: มหาวทยาขอนแกน, 2553.
ณราภรณ บญกจ. ตวแทนความคดของนกเรยนชนมธยมศกษาปท 5 เรอง แสง จากการจด
กจกรรมการเรยนการสอนบนพนฐานทฤษฎคอนสตรคตวสตโดยใชวธการเรยนรแบบ
ทานาย-สงเกต–อธบาย. วทยานพนธปรญญาศกษาศาสตรมหาบณฑต:
มหาวทยาลยขอนแกน, 2553.
นชชา แดงงาม. “ผลการจดการเรยนรแบบทานาย-สงเกต-อธบายรวมกบการสาธตอยางงายตอ
ความคดรวบยอดเรองการเคลอนทแบบหมน”, วารสารหนวยวจยวทยาศาสตร
เทคโนโลย และสงแวดลอมเพอการเรยนร มหาวทยาลยศรนครนทรวโรฒ.
5(1): 86-93; มกราคม-มถนายน, 2557.
มารนา ตาเดอน. “การประเมนความเขาใจเกยวกบความคดรวบยอดเรองแรงและการเคลอนทของ
นกเรยนชนมธยมศกษาตอนปลาย”, ใน การประชมวชาการ มอบ. วจย ครงท 5.
น.221-227. อบลราชธาน: มหาวทยาลยอบลราชธาน, 2556.
รจกะ การสข. การพฒนาความเขาใจเรองแรงและการเคลอนทของนกเรยน ชนมธยมศกษาปท 4
ดวยการจดกจกรรมการเรยนรแบบทานาย-สงเกต-อธบาย.
วทยานพนธปรญญาวทยาศาสตรมหาบณฑต: มหาวทยาลยอบลราชธาน, 2554.
รงโรจน โคตรนารา. การพฒนามโนมตทางวทยาศาสตร เรอง เสยง ของนกเรยนชนมธยมศกษา
ปท 5 โดยใชวธการสอนแบบ PREDICT–OBSERVE-EXPLAIN (POE).
วทยานพนธปรญญาศกษาศาสตรมหาบณฑต: มหาวทยาลยขอนแกน, 2555.
ลลตา สารสวรรณ. ตวแทนความคด เรอง งานและพลงงาน ของนกเรยนชนมธยมศกษาปท 4
โดยใชวธการจดการเรยนรแบบทานาย-สงเกต-อธบาย. วทยานพนธปรญญาการศกษา
มหาบณฑต: มหาวทยาลยขอนแกน, 2556.
วนชา ประยรพนธ. รปแบบการทาความเขาใจบนพนฐานของทฤษฎคอนสตรคตวสตเรองแรงและ
การเคลอนท ชนมธยมศกษาปท 1 โดยใชวธ Predict-Observe-Explain (POE).
วทยานพนธปรญญาการศกษามหาบณฑต: มหาวทยาลยขอนแกน, 2554.

49
เอกสารอางอง (ตอ)
ศรนภา ภาคภม. การพฒนาความเขาใจมโนมตทางวทยาศาสตร รายวชาฟสกส เรอง แสงและ
ทศนอปกรณของนกเรยนชนมธยมศกษาปท 5 โดยใชวธ PREDICT–OBSERVE–
EXPLAIN (POE). วทยานพนธปรญญาศกษาศาสตรมหาบณฑต: มหาวทยาลยขอนแกน,
2554.
สงกรานต มลศรแกว. “ตวแทนความคด เรอง ของไหล ของนกเรยนชนมธยมศกษาปท 5 บนพนฐาน
ของทฤษฎคอนสตคตวสต โดยใชรปแบบการสอนแบบทานาย-สงเกต-อธบาย”, ใน
การประชมทางวชาการเสนอผลงานวจยระดบบณฑตศกษา ครงท 11. น.1191-1200.
ขอนแกน: มหาวทยาลยขอนแกน, 2554.
สลลทพย พรมยอง. ตวแทนความคด เรอง ไฟฟา ของนกเรยนชนมธยมศกษาชนปท 6 กอนและ
หลงการจดกจกรรมการสอนโดยใชวธ Predict-Observe-Explain (POE).
วทยานพนธปรญญาศกษาศาสตรมหาบณฑต: มหาวทยาขอนแกน, 2556.
สทธศกด จนดาวงศ. ผลของการจดกจกรรมการเรยนรทสงเสรมการใหเหตผลเชงวทยาศาสตรตอ
ตวแทนความคดเรอง ปรากฏการณดาราศาสตรพนฐาน ของนกเรยนระดบมธยมศกษา
ตอนตน. วทยานพนธปรญญาการศกษาดษฎบณฑต: มหาวทยาลยศรนครนทรวโรฒ,
2555.
สชาต วฒนชย. ผลของการเรยนบนเครอขายทพฒนาตามแนวคอนสตรคตวสต เรอง
การบาดเจบของขอเขามา สาหรบนกศกษาสตวแพทยศาสตรชนปท 5.
การคนควาอสระปรญญาศกษาศาสตรมหาบณฑต: มหาวทยาลยขอนแกน, 2547.
สราง นรโภค. การเสรมสรางความเขาใจ เรอง แรงและกฎขอท 2 ของนวตน โดยใชการทดลอง
รวมกบเทคนคทานาย-สงเกต-อธบาย (POE). วทยานพนธปรญญาวทยาศาสตร
มหาบณฑต: มหาวทยาลยอบลราชธาน, 2556.
Adadan, E., Irving, K. E. and Trundle, K. C. “Impacts of multi-representational
instruction on high school students’ conceptual understandings of the
particulate nature of matter”, International journal of science education.
31(13): 1743-1775; August, 2009.
Brewer, WF. “Scientific Theories and Naïve Theories as Forms of Mental
Representation”, Phycologism Science and education. 8(5): 489-505;
September, 1999.

50
เอกสารอางอง (ตอ)
Hake. R.R. “Interactive-engagement vs traditional methods: A six-thousand- student
survey of mechanics test data for introductory physics courses”, American
Journal of physics. 61(1): 64–74, 1998.
Kohl, P. and et al. “Comparing explicit and implicit teaching of multiple
representation use in physics problem solving”, 2006 physics education
research conference. New York: Syracuse, 2007.
Rakkapao, S., and et al. “Evaluation of POE and instructor-led problem-solving
approaches integrated into force and motion lecture classes using a model
analysis technique”, European Journal of Physics. 35(1): 015-016;
December, 2014.
Smith, T.I. and Wittmann, M.C. “Applying a resources framework to analysisof the
Force and Motion Conceptual Evaluation”, Physical Review Special
Topics–Physics Education Research. 4: 1–12; November, 2008.
Thornton, R.K. and Sokoloff, D.R. “Assesing student learning of Newton's laws:
The Force and Motion Conceptual Evaluation and the Evaluation of Active
Learning Laboratory and Lecture Curricula”, American Journal of Physics.
66(4): 338-351; April, 1998.
Teller, P. (2010). “Representation in Science”, Maleficent. http://maleficent.
ucdavis.edu:8080/paul/manuscripts-and-talks/RIS%20final/view. April 4,
2015.
White, R.T. and Gunstone, R.F. Probing understanding. London: Falmer Press, 1992.

51
ภาคผนวก

52
ภาคผนวก ก ชดกจกรรมการสรางตวแทนความคดดวยเลโกเรอง “แรงและการเคลอนท”
53
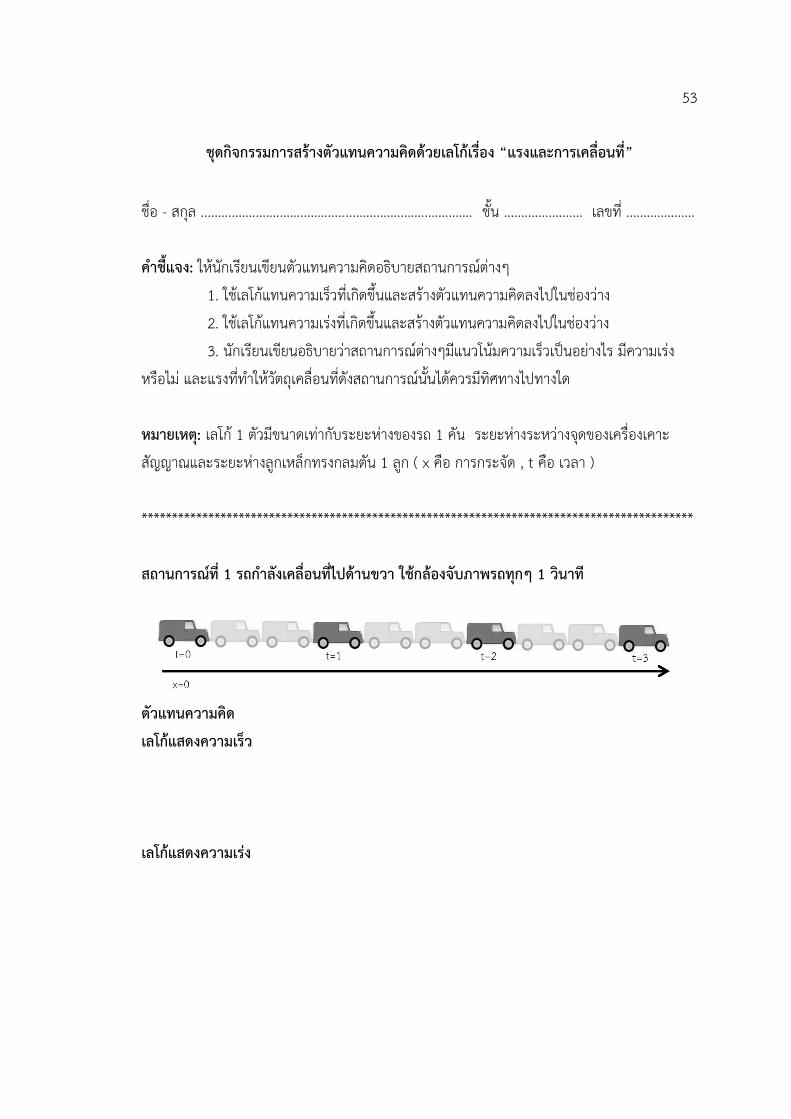
ชดกจกรรมการสรางตวแทนความคดดวยเลโกเรอง “แรงและการเคลอนท”
ชอ - สกล ............................................................................... ชน ....................... เลขท .................... ค าชแจง: ใหนกเรยนเขยนตวแทนความคดอธบายสถานการณตางๆ 1. ใชเลโกแทนความเรวทเกดขนและสรางตวแทนความคดลงไปในชองวาง 2. ใชเลโกแทนความเรงทเกดขนและสรางตวแทนความคดลงไปในชองวาง 3. นกเรยนเขยนอธบายวาสถานการณตางๆมแนวโนมความเรวเปนอยางไร มความเรงหรอไม และแรงทท าใหวตถเคลอนทดงสถานการณนนไดควรมทศทางไปทางใด หมายเหต: เลโก 1 ตวมขนาดเทากบระยะหางของรถ 1 คน ระยะหางระหวางจดของเครองเคาะสญญาณและระยะหางลกเหลกทรงกลมตน 1 ลก ( x คอ การกระจด , t คอ เวลา ) ******************************************************************************************* สถานการณท 1 รถก าลงเคลอนทไปดานขวา ใชกลองจบภาพรถทกๆ 1 วนาท ตวแทนความคด เลโกแสดงความเรว เลโกแสดงความเรง

54
เขยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา
อธบายสถานการณท 1
.......................................................................................................................................................
.......................................................................................................................................................
.......................................................................................................................................................
.......................................................................................................................................................
.......................................................................................................................................................
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา

55
สถานการณท 2 รถก าลงเคลอนทไปดานขวา ใชกลองจบภาพรถทกๆ 1 วนาท
ตวแทนความคด
เลโกแสดงความเรว
เลโกความเรง
เชยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา
อธบายสถานการณท 2
……..................................................................................................................................................
.......................................................................................................................................................
.......................................................................................................................................................
.......................................................................................................................................................
.......................................................................................................................................................
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา

56
สถานการณท 3 รถก าลงเคลอนทไปดานขวา ใชกลองจบภาพรถทกๆ 1 วนาท
ตวแทนความคด
เลโกแสดงความเรว
เลโกแสดงความเรง
เขยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา
อธบายสถานการณท 3 ..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา

57
สถานการณท 4 รถก าลงเคลอนทไปดานซาย ใชกลองจบภาพรถทกๆ 1 วนาท
ตวแทนความคด ตวแทนความคด เลโกแสดงความเรว เลโกแสดงความเรง รางกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา
อธบายสถานการณท 4
.......................................................................................................................................................
.......................................................................................................................................................
.......................................................................................................................................................
.......................................................................................................................................................
......................................................................................................................................................
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา

58
สถานการณท 5 รถก าลงเคลอนทไปดานซาย ใชกลองจบภาพรถทกๆ 1 วนาท
ตวแทนความคด
เลโกแสดงความเรว เลโกแสดงความเรง เขยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา
อธบายสถานการณท 5
.......................................................................................................................................................
.......................................................................................................................................................
.......................................................................................................................................................
.......................................................................................................................................................
......................................................................................................................................................
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา

59
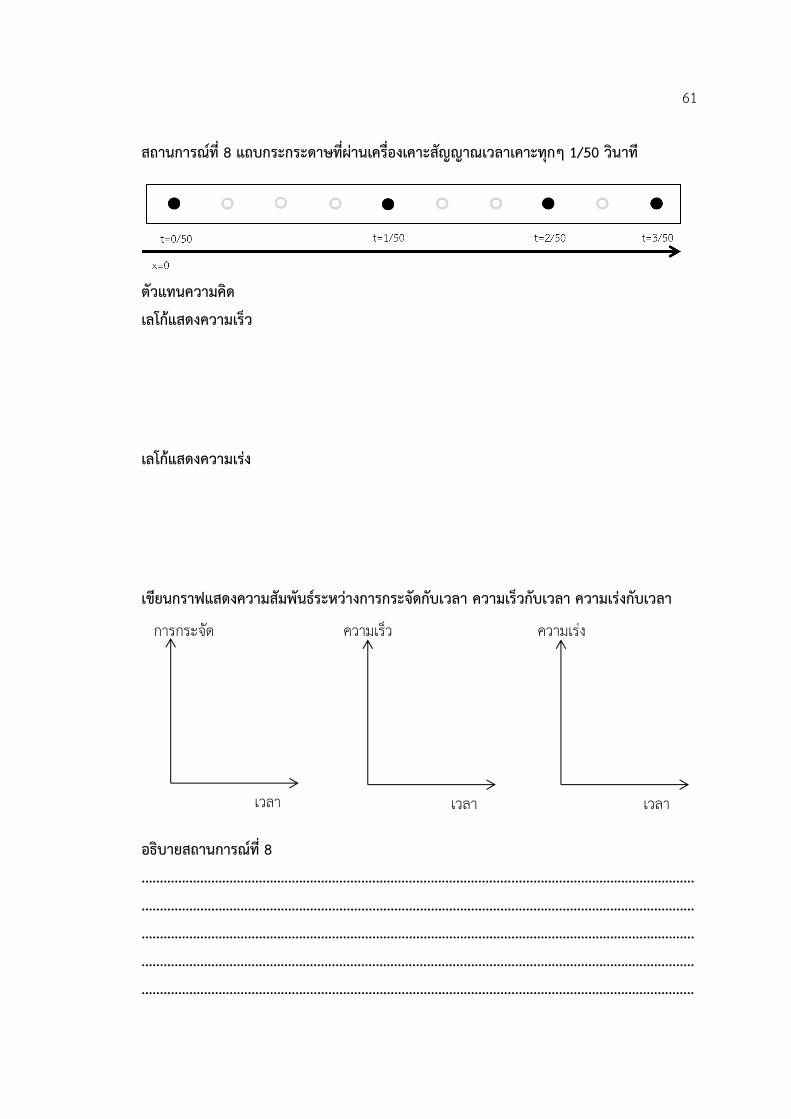
สถานการณท 6 แถบกระกระดาษทผานเครองเคาะสญญาณเวลาเคาะทกๆ 1/50 วนาท
ตวแทนความคด เลโกแสดงความเรว เลโกแสดงความเรง เขยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา
อธบายสถานการณท 6 ..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา

60
สถานการณท 7 แถบกระกระดาษทผานเครองเคาะสญญาณเวลาเคาะทกๆ 1/50 วนาท
ตวแทนความคด เลโกแสดงความเรว เลโกแสดงความเรง เขยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา
อธบายสถานการณท 7
.......................................................................................................................................................
.......................................................................................................................................................
.......................................................................................................................................................
.......................................................................................................................................................
......................................................................................................................................................
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา
61
สถานการณท 8 แถบกระกระดาษทผานเครองเคาะสญญาณเวลาเคาะทกๆ 1/50 วนาท ตวแทนความคด เลโกแสดงความเรว เลโกแสดงความเรง เขยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา อธบายสถานการณท 8 ...................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา

62
t=0
t=1
t=2
t=3
สถานการณท 9 ปลอยลกเหลกทรงกลมตนใหตกจากทสง ใชกลองจบภาพรถทกๆ 1 วนาท ตวแทนความคด เลโกแสดงความเรว เลโกแสดงความเรง เขยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา
อธบายสถานการณท 9 ..................................................................................................................................................................................................................................................................................................................................................................................................................................................................... ..............................................................................................................................................................................................................................................................................................................
x=0
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา
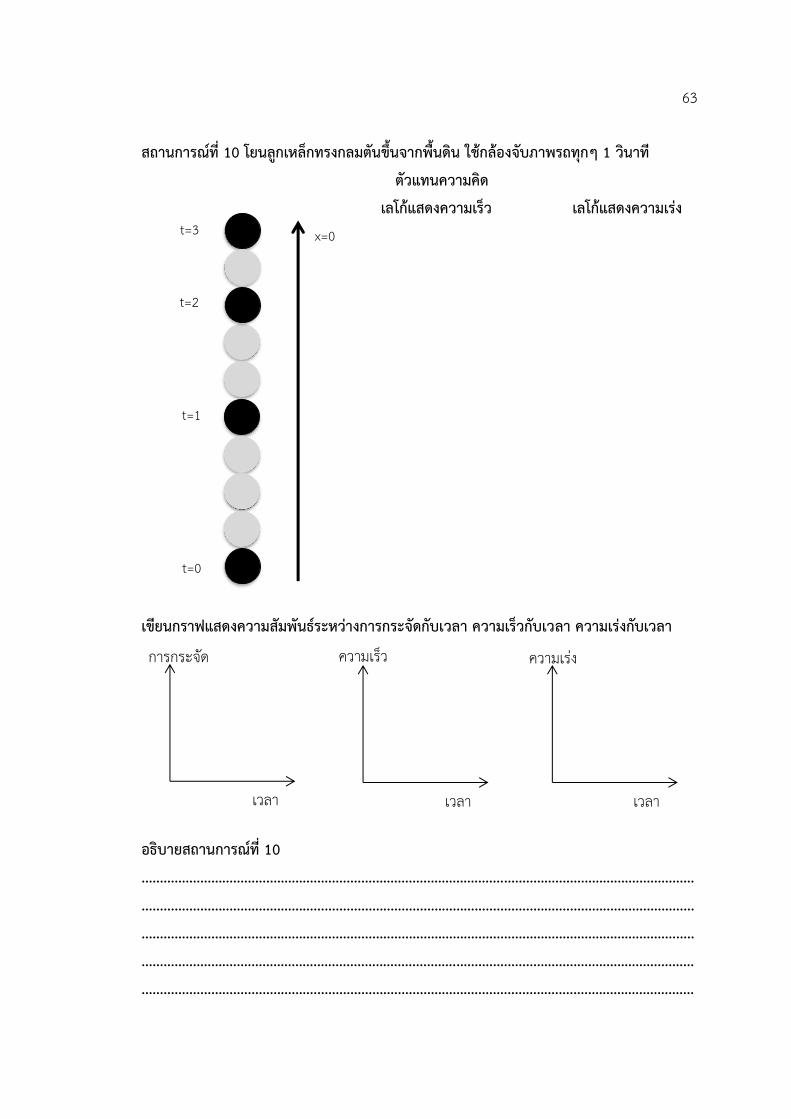
63
t=3
t=2
t=1
t=0
สถานการณท 10 โยนลกเหลกทรงกลมตนขนจากพนดน ใชกลองจบภาพรถทกๆ 1 วนาท ตวแทนความคด เลโกแสดงความเรว เลโกแสดงความเรง เขยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา อธบายสถานการณท 10 ...................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
x=0
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา
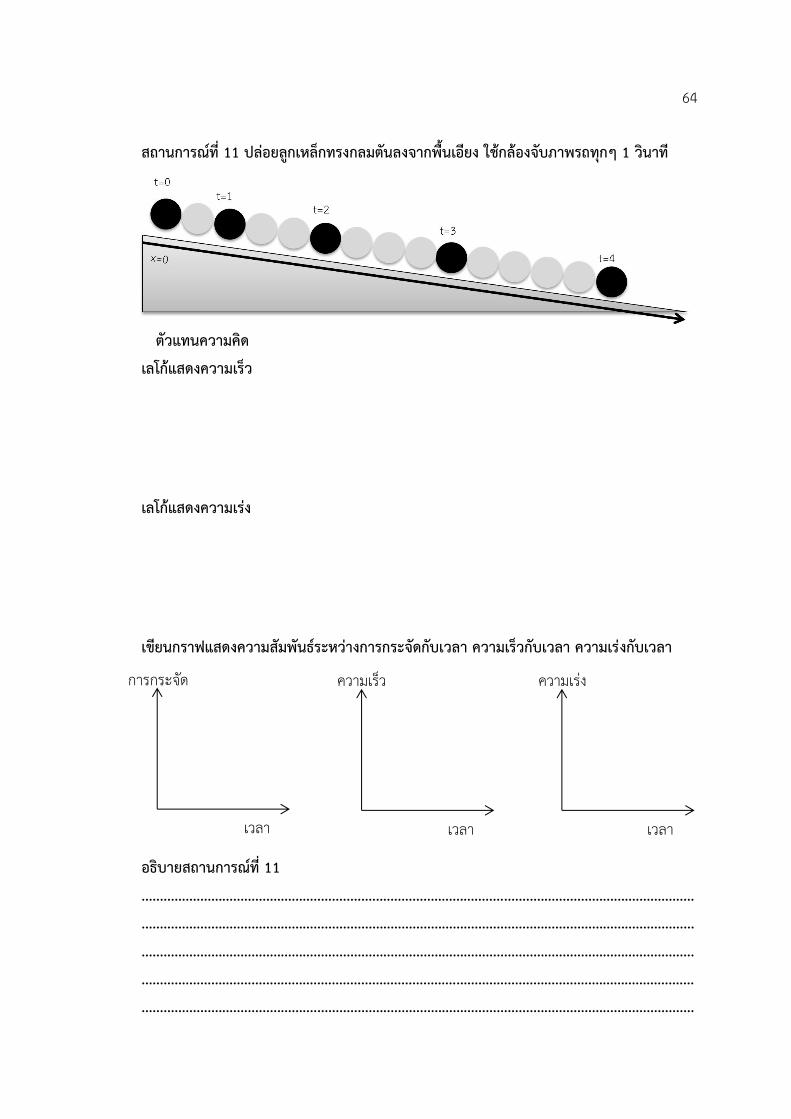
64
สถานการณท 11 ปลอยลกเหลกทรงกลมตนลงจากพนเอยง ใชกลองจบภาพรถทกๆ 1 วนาท
ตวแทนความคด เลโกแสดงความเรว เลโกแสดงความเรง เขยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา
อธบายสถานการณท 11 ...................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา

65
สถานการณท 12 กลงลกเหลกทรงกลมตนขนพนเอยง ใชกลองจบภาพรถทกๆ 1 วนาท
ตวแทนความคด เลโกแสดงความเรว เลโกแสดงความเรง เขยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา อธบายสถานการณท 12 ...................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา

66
สถานการณท 13 ลกเหลกทรงกลมตนเคลอนทไป-กลบ ใชกลองจบภาพรถทกๆ 1 วนาท
ตวแทนความคด เลโกแสดงความเรว เลโกแสดงความเรง เขยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา อธบายสถานการณท 13 ..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา

67
สถานการณท 14 ลกเหลกทรงกลมตนเคลอนทไป-กลบ ใชกลองจบภาพรถทกๆ 1 วนาท
ตวแทนความคด เลโกแสดงความเรว เลโกแสดงความเรง เขยนกราฟแสดงความสมพนธระหวางการกระจดกบเวลา ความเรวกบเวลา ความเรงกบเวลา อธบายสถานการณท 14 ...................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
การกระจด
เวลา
ความเรว
เวลา
ความเรง
เวลา

68
ค าถามทายกจกรรม 1. จากรปเปนการรวของการหยดน ามนของรถยนต A และ B ขอใดดงตอไปนเปนจรง
a. ทงสองคนมความเรวคงท b. ทงสองคนมการเคลอนทดวยความเรง c. รถ A มความเรง รถ B ไมมความเรง d. รถ B มความเรง รถ A ไมมความเรง e. รถ A มความเรงทสงกวารถ B f. รถ B มความเรงทสงกวารถ A
2. วตถเคลอนทจากขวาไปซาย เปนการเคลอนทซงแสดงโดยใชแผนภาพของการหยดของน ามน
วตถมความเรว _______ และมความเรง _______ a. ไปทางขวา, ไปทางขวา b. ไปทางขวา, ไปทางซาย c. ไปทางซาย,ไปทาง ขวา d. ไปทางซาย, ไปทางซาย e. ไปทางขวา, ศนย f. ไปทางซาย, ศนย
3. รถของสมชายมการรวไหลของน ามนและน ามนหยดบนถนนขณะทเธอขบผานถนนสรนทร-ชองจอม ซงรอยน ามนทปรากฏบนถนนสรนทร-ชองจอม สามารถอธบายไดโดยค าอธบายดานลาง ใหจบคเหตการณกบแผนภาพพรอมใหเหตผลประกอบ
แผนภาพ A
แผนภาพ B
แผนภาพ C

69
ค าอธบาย แผนภาพ 1. สมชายขบดวยความเรวคงท แลวจงคอยๆ ลดความเรงลงเปนเวลา 30 วนาท จากนนขบรถอยางชาๆ ทความเรวคงท
2. สมชายลดความเรงอยางรวดเรวจากความเรวสงจนชาลง แลวจงคอยๆ เพมความเรงจนถงความเรวระดบปานกลาง
3. สมชายขบรถดวยความเรวปานกลางและคอยๆ เรงความเรวอยางชาๆ

70
ภาคผนวก ข แบบประเมนแนวคด FMCE (ฉบบภาษาไทย)

71
แบบประเมนแนวคดเรอง “แรงและการเคลอนท” (Force and Motion Conceptual Evaluation, FMCE)
ค าชแจง: 1. ตอบค ำถำมและเขยนแผนภำพควำมคดขอ 1–33 ในชองวำงของกระดำษค ำตอบ อยำลมกรอกชอนกเรยนในกระดำษค ำตอบ 2. สงกระดำษค ำถำมและกระดำษค ำตอบคนทงค หามเขยนค าตอบหรอจดบนทกสงใดๆ ลงในกระดาษค าถาม **************************************************************************** ค าถามขอ 1–7 เลอนน ำแขงเคลอนทบนพนน ำแขงซงแรงเสยดทำนมขนำดนอยมำกจนไมตองน ำมำคดคนใสรองเทำทพนรองเทำมปมแหลม ๆ สำมำรถยนบนน ำแขงและออกแรงดนเลอนใหเคลอนทไปบนพนน ำแขงได จงเลอกแรงหนงแรง (จำก A ถง G) ทกระท ำตอเลอน ซงสอดคลองกบกำรเคลอนทของเลอนในแตละขอ ใชตวเลอกไดมำกกวำหนงครงหรอไมใชเลยกได และเลอกไดเพยงค ำตอบเดยวในแตละขอ ใหตอบตวเลอก J ถำไมมตวเลอกใดถก
A. แรงมทศไปทำงขวาและมขนำดทก ำลงเพมขน B. แรงมทศไปทำงขวาและมขนำดทคงตว C. แรงมทศไปทำงขวาและมขนำดทก ำลงลดลง
D. ไมจ ำเปนตองมแรงกระท ำ
E. แรงมทศไปทำงซายและมขนำดทก ำลงลดลง F. แรงมทศไปทำงซายและมขนำดคงตว G. แรงมทศไปทำงซายและมขนำดทก ำลงเพมขน
_____1. เลอนก ำลงเคลอนทไปทำงขวำโดยเคลอนทเรวขนดวยอตรำสม ำเสมอ (ควำมเรงคงตว) _____2. เลอนก ำลงเคลอนทไปทำงขวำดวยควำมเรวคงตว _____3. เลอนก ำลงเคลอนทไปทำงขวำ โดยเคลอนทชำลงดวยอตรำสม ำเสมอ (ควำมเรงคงตว)

72
_____4. เลอนก ำลงเคลอนทไปทำงซำย โดยเคลอนทเรวขนดวยอตรำสม ำเสมอ (ควำมเรงคงตว) _____5. เลอนถกดนใหเคลอนทจำกหยดนง จนกระทงมควำมเรวขนำดหนง ไปทำงขวำ แรงใดทจะท ำใหเลอนยงคงเคลอนทดวยควำมเรวน _____6. เลอนก ำลงเคลอนทชำลงดวยอตรำสม ำเสมอและมควำมเรงไปทำงขวำ _____7. เลอนก ำลงเคลอนทไปทำงซำย โดยเคลอนทชำลงดวยอตรำสม ำเสมอ (ควำมเรงคงตว) ค าถามขอ 8–10 รถของเลนถกผลกอยำงเรวใหเคลอนทขนพนเอยง หลงจำกทปลอยมอ รถเคลอนทขนพนเอยงไปจนถงต ำแหนงสงสดและเคลอนทกลบลงมำอก แรงเสยดทำนมขนำดนอยมำกจนไมตองน ำมำคด
ใหใชตวเลอกตอไปน (จำก A ถง G) เพอแสดงแรงสทธทกระท ำตอรถในแตละกรณทบรรยำยขำงลำง ใหตอบตวเลอก J ถำไมมตวเลอกใดถก A. แรงสทธคงตว ทศลงตำมพนเอยง B. แรงสทธมขนำดทก ำลงเพมขน ทศลงตำมพนเอยง C. แรงสทธมขนำดทก ำลงลดลง ทศลงตำมพนเอยง D. แรงสทธเปนศนย E. แรงสทธคงตว ทศขนตำมพนเอยง F. แรงสทธมขนำดทก ำลงเพมขน ทศขนตำมพนเอยง G. แรงสทธมขนำดทก ำลงลดลง ทศขนตำมพนเอยง ______8. รถก ำลงเคลอนทขนพนเอยงหลงจำกปลอยมอ ______9. รถอยทจดสงสด _____10. รถก ำลงเคลอนทลงพนเอยง ค าถามขอ 11–13 โยนเหรยญๆ หนงขนไปตรงๆ หลงจำกทเหรยญหลดมอ เหรยญเคลอนทขนไปจนถงจดสงสดแลวตกกลบลงมำอก ใหใชตวเลอกตอไปน (จำก A ถง G) เพอบอกวำแรงใดก ำลงกระท ำตอเหรยญในแตละกรณทบรรยำยขำงลำง ใหตอบตวเลอก J ถำไมมตวเลอกใดถก ไมตองค ำนงถงผลเนองจำกแรงตำนอำกำศ A. แรงมทศลงและมขนำดคงตว

73
B. แรงมทศลงและมขนำดทก ำลงเพมขน C. แรงมทศลงและมขนำดทก ำลงลดลง D. แรงเปนศนย E. แรงมทศขนและมขนำดคงตว F. แรงมทศขนและมขนำดทก ำลงเพมขน G. แรงมทศขนและมขนำดทก ำลงลดลง ______11. เหรยญก ำลงเคลอนทขนหลงจำกทถกโยน ______12. เหรยญอยทจดสงสด ______13. เหรยญก ำลงเคลอนทลง ค าถามขอ 14–21 รถของเลนคนหนงสำมำรถเคลอนทไปทำงขวำหรอทำงซำยได ตำมเสนตรงในแนวระดบ (จด o ในรปคอจดก ำเนดของแกน ระยะทำง) ก ำหนดใหทศขวำมอคอทศบวก
ใหสมมตวำแรงเสยดทำนมขนำดนอยมำกจนไมตองน ำมำคด ใหเลอกกรำฟแรง-เวลำ (จำก A ถง H) หนงกรำฟส ำหรบขอควำม แตละขอขำงลำง ซงจะท ำใหกำรเคลอนทของรถเปนไปตำมท บรรยำยคณอำจใชตวเลอกไดมำกกวำหนงครงหรอไมใชเลยกได ใหตอบตวเลอก J ถำไมมตวเลอกใดถก ______14. รถเคลอนทไปทำงขวำ (หนหำงจำกจดก ำเนด) ดวยควำมเรวคงตว ______15. รถอยนง ______16. รถเคลอนทไปทำงขวำโดยเคลอนทเรวขนดวยอตรำ สม ำเสมอ (ควำมเรงคงตว) ______17. รถเคลอนทไปทำงซำย (เขำหำจดก ำเนด) ดวยควำมเรวคงตว ______18. รถเคลอนทไปทำงขวำ โดยเคลอนทชำลงดวย อตรำสม ำเสมอ (ควำมเรงคงตว)
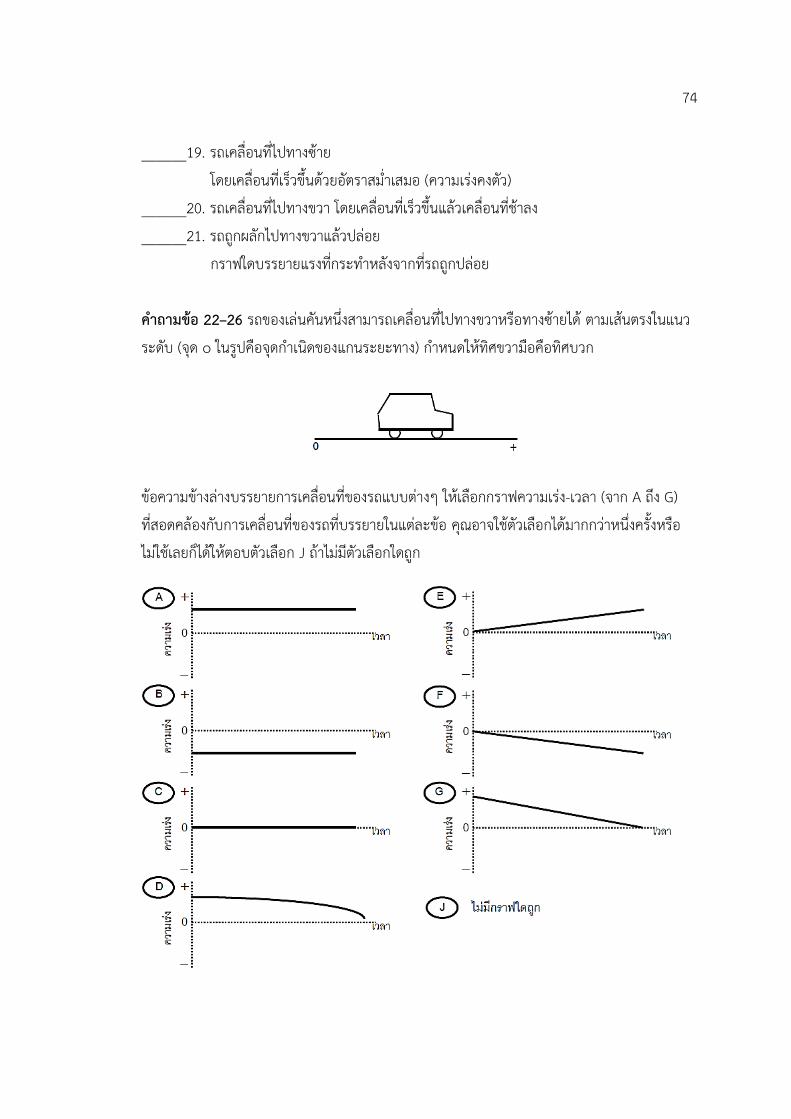
74
______19. รถเคลอนทไปทำงซำย โดยเคลอนทเรวขนดวยอตรำสม ำเสมอ (ควำมเรงคงตว) ______20. รถเคลอนทไปทำงขวำ โดยเคลอนทเรวขนแลวเคลอนทชำลง ______21. รถถกผลกไปทำงขวำแลวปลอย กรำฟใดบรรยำยแรงทกระท ำหลงจำกทรถถกปลอย ค าถามขอ 22–26 รถของเลนคนหนงสำมำรถเคลอนทไปทำงขวำหรอทำงซำยได ตำมเสนตรงในแนวระดบ (จด o ในรปคอจดก ำเนดของแกนระยะทำง) ก ำหนดใหทศขวำมอคอทศบวก
ขอควำมขำงลำงบรรยำยกำรเคลอนทของรถแบบตำงๆ ใหเลอกกรำฟควำมเรง-เวลำ (จำก A ถง G) ทสอดคลองกบกำรเคลอนทของรถทบรรยำยในแตละขอ คณอำจใชตวเลอกไดมำกกวำหนงครงหรอ ไมใชเลยกไดใหตอบตวเลอก J ถำไมมตวเลอกใดถก
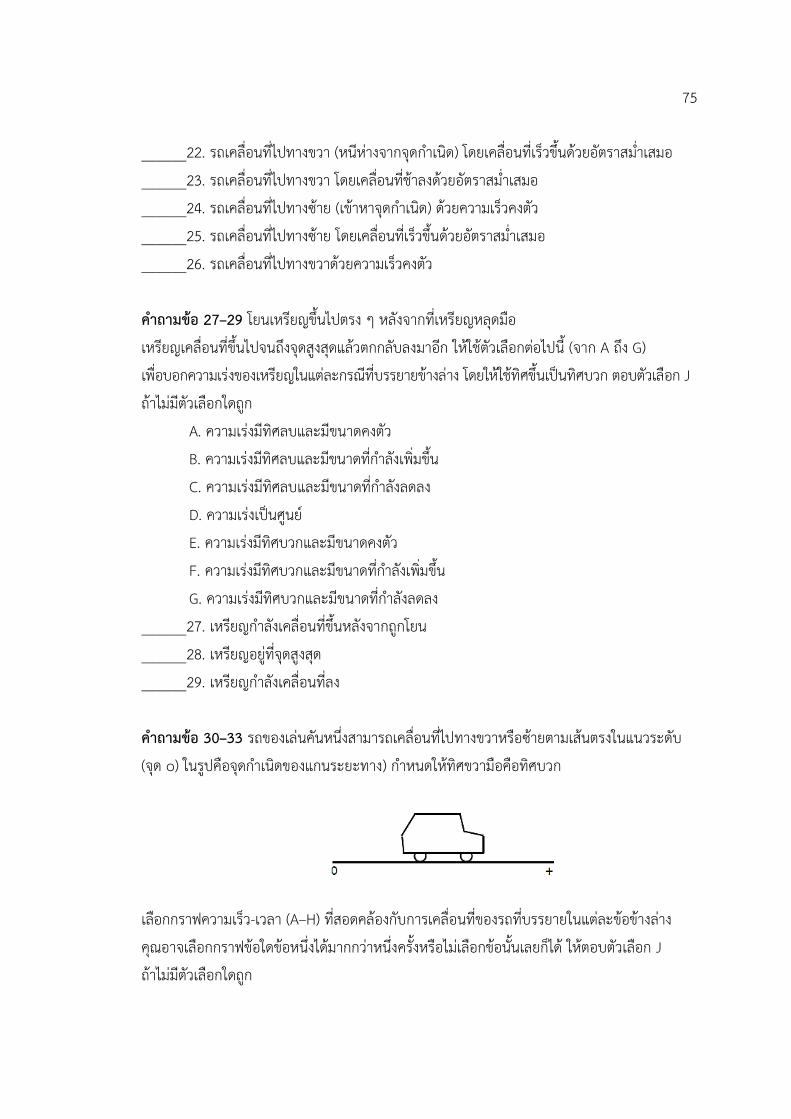
75
______22. รถเคลอนทไปทำงขวำ (หนหำงจำกจดก ำเนด) โดยเคลอนทเรวขนดวยอตรำสม ำเสมอ ______23. รถเคลอนทไปทำงขวำ โดยเคลอนทชำลงดวยอตรำสม ำเสมอ ______24. รถเคลอนทไปทำงซำย (เขำหำจดก ำเนด) ดวยควำมเรวคงตว ______25. รถเคลอนทไปทำงซำย โดยเคลอนทเรวขนดวยอตรำสม ำเสมอ ______26. รถเคลอนทไปทำงขวำดวยควำมเรวคงตว ค าถามขอ 27–29 โยนเหรยญขนไปตรง ๆ หลงจำกทเหรยญหลดมอ เหรยญเคลอนทขนไปจนถงจดสงสดแลวตกกลบลงมำอก ใหใชตวเลอกตอไปน (จำก A ถง G) เพอบอกควำมเรงของเหรยญในแตละกรณทบรรยำยขำงลำง โดยใหใชทศขนเปนทศบวก ตอบตวเลอก J ถำไมมตวเลอกใดถก A. ควำมเรงมทศลบและมขนำดคงตว B. ควำมเรงมทศลบและมขนำดทก ำลงเพมขน C. ควำมเรงมทศลบและมขนำดทก ำลงลดลง D. ควำมเรงเปนศนย E. ควำมเรงมทศบวกและมขนำดคงตว F. ควำมเรงมทศบวกและมขนำดทก ำลงเพมขน G. ควำมเรงมทศบวกและมขนำดทก ำลงลดลง ______27. เหรยญก ำลงเคลอนทขนหลงจำกถกโยน ______28. เหรยญอยทจดสงสด ______29. เหรยญก ำลงเคลอนทลง ค าถามขอ 30–33 รถของเลนคนหนงสำมำรถเคลอนทไปทำงขวำหรอซำยตำมเสนตรงในแนวระดบ (จด o) ในรปคอจดก ำเนดของแกนระยะทำง) ก ำหนดใหทศขวำมอคอทศบวก
เลอกกรำฟควำมเรว-เวลำ (A–H) ทสอดคลองกบกำรเคลอนทของรถทบรรยำยในแตละขอขำงลำง คณอำจเลอกกรำฟขอใดขอหนงไดมำกกวำหนงครงหรอไมเลอกขอนนเลยกได ใหตอบตวเลอก J ถำไมมตวเลอกใดถก

76
______30. รถก ำลงเคลอนทไปทำงขวำ (ออกจำกจดก ำเนด) ดวยควำมเรวคงตว ______31. รถมกำรเคลอนทยอนกลบทศ ______32. รถก ำลงเคลอนทไปทำงซำย (เขำหำจดก ำเนด) ดวยควำมเรวคงตว ______33. รถก ำลงเพม อตรำเรว ดวยอตรำสม ำเสมอ

77
ภาคผนวก ค คะแนนนกเรยน

78
ตารางท ค.1 คะแนนกอนเรยนและหลงเรยนของนกเรยนแตละคนทไดจากแบบประเมน ความเขาใจ FMCE 33 ขอ
นกเรยน คะแนน
กอนเรยน (33 คะแนน)
รอยละ กอนเรยน
คะแนน หลงเรยน
(33 คะแนน)
รอยละ หลงเรยน
<g>
คนท 1 3 9.09 27 81.82 0.80 คนท 2 4 12.12 24 72.73 0.69 คนท 3 5 15.15 25 75.76 0.71 คนท 4 8 24.24 18 54.55 0.40 คนท 5 6 18.18 20 60.61 0.52 คนท 6 8 24.24 22 66.67 0.56 คนท 7 5 15.15 17 51.52 0.43 คนท 8 7 21.21 28 84.85 0.81 คนท 9 5 15.15 25 75.76 0.71 คนท 10 7 21.21 14 42.42 0.27 คนท 11 6 18.18 29 87.88 0.85 คนท 12 9 27.27 22 66.67 0.54 คนท 13 7 21.21 23 69.70 0.62 คนท 14 3 9.09 19 57.58 0.53 คนท 15 9 27.27 22 66.67 0.54 คนท 16 8 24.24 21 63.64 0.52 คนท 17 10 30.30 18 54.55 0.35 คนท 18 6 18.18 26 78.79 0.74 คนท 19 3 9.09 24 72.73 0.70 คนท 20 5 15.15 20 60.61 0.54 คนท 21 7 21.21 21 63.64 0.54 คนท 22 8 24.24 28 84.85 0.80 คนท 23 10 30.30 25 75.76 0.65 คนท 24 6 18.18 28 84.85 0.81 คนท 25 5 15.15 20 60.61 0.54
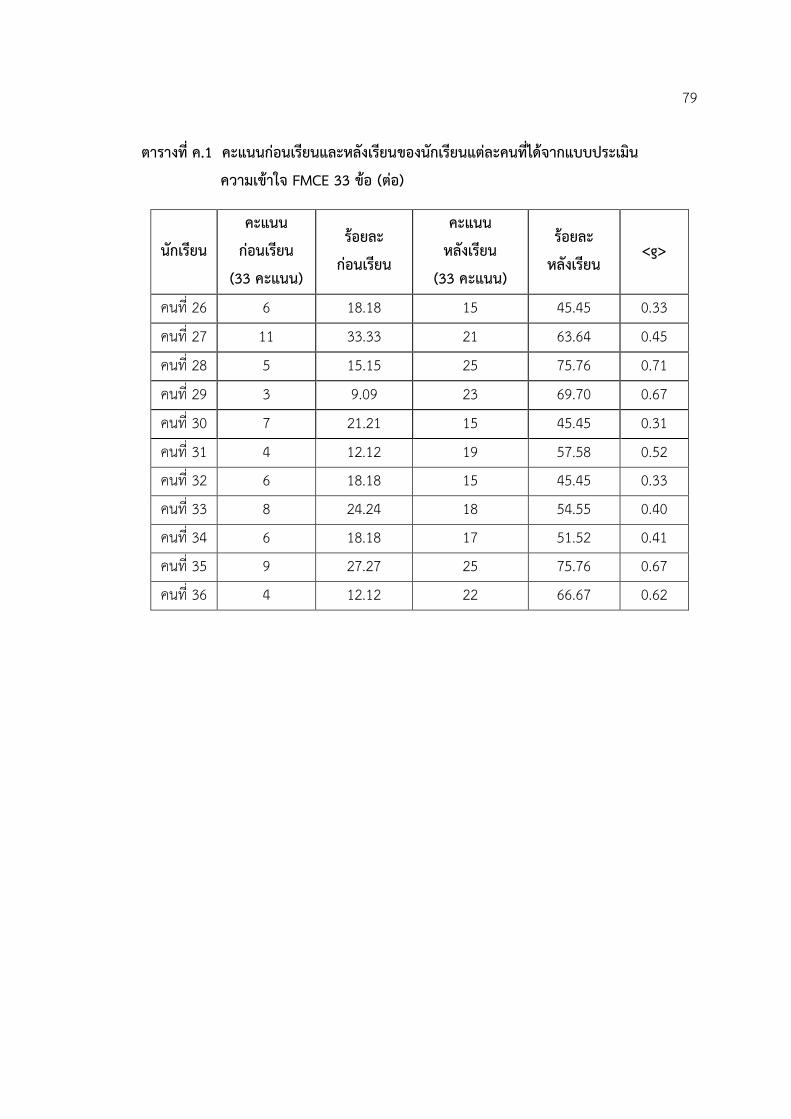
79
ตารางท ค.1 คะแนนกอนเรยนและหลงเรยนของนกเรยนแตละคนทไดจากแบบประเมน ความเขาใจ FMCE 33 ขอ (ตอ)
นกเรยน คะแนน
กอนเรยน (33 คะแนน)
รอยละ กอนเรยน
คะแนน หลงเรยน
(33 คะแนน)
รอยละ หลงเรยน
<g>
คนท 26 6 18.18 15 45.45 0.33 คนท 27 11 33.33 21 63.64 0.45 คนท 28 5 15.15 25 75.76 0.71 คนท 29 3 9.09 23 69.70 0.67 คนท 30 7 21.21 15 45.45 0.31 คนท 31 4 12.12 19 57.58 0.52 คนท 32 6 18.18 15 45.45 0.33 คนท 33 8 24.24 18 54.55 0.40 คนท 34 6 18.18 17 51.52 0.41 คนท 35 9 27.27 25 75.76 0.67 คนท 36 4 12.12 22 66.67 0.62

80
ตารางท ค.2 คะแนนกอนเรยนและหลงเรยนของขอสอบ FMCE แตละขอของนกเรยน 36 คน
ขอท คะแนน
กอนเรยน (36 คะแนน)
รอยละ กอนเรยน
คะแนน หลงเรยน
(36 คะแนน)
รอยละ หลงเรยน
<g>
ขอท 1 10 27.78 35 97.22 0.96 ขอท 2 0 0.00 33 91.67 0.92 ขอท 3 0 0.00 32 88.89 0.89 ขอท 4 12 33.33 33 91.67 0.88 ขอท 5 9 25.00 29 80.56 0.74 ขอท 6 4 11.11 14 38.89 0.31 ขอท 7 1 2.78 22 61.11 0.60 ขอท 8 2 5.56 33 91.67 0.91 ขอท 9 1 2.78 10 27.78 0.26 ขอท 10 4 11.11 26 72.22 0.69 ขอท 11 6 16.67 27 75.00 0.70 ขอท 12 2 5.56 7 19.44 0.15 ขอท 13 4 11.11 27 75.00 0.72 ขอท 14 1 2.78 28 77.78 0.77 ขอท 15 28 77.78 36 100.00 1.00 ขอท 16 16 44.44 32 88.89 0.80 ขอท 17 3 8.33 24 66.67 0.64 ขอท 18 4 11.11 21 58.33 0.53 ขอท 19 11 30.56 16 44.44 0.20 ขอท 20 1 2.78 12 33.33 0.31 ขอท 21 5 13.89 6 16.67 0.03 ขอท 22 18 50.00 27 75.00 0.50 ขอท 23 4 11.11 27 75.00 0.72 ขอท 24 6 16.67 22 61.11 0.53 ขอท 25 13 36.11 15 41.67 0.09 ขอท 26 11 30.56 25 69.44 0.56

81
ตารางท ค.2 คะแนนกอนเรยนและหลงเรยนของขอสอบ FMCE แตละขอของนกเรยน 36 คน (ตอ)
ขอท คะแนน
กอนเรยน (36 คะแนน)
รอยละ กอนเรยน
คะแนน หลงเรยน
(36 คะแนน)
รอยละ หลงเรยน
<g>
ขอท 27 3 8.33 31 86.11 0.85 ขอท 28 2 5.56 6 16.67 0.12 ขอท 29 2 5.56 24 66.67 0.65 ขอท 30 19 52.78 27 75.00 0.47 ขอท 31 9 25.00 19 52.78 0.37 ขอท 32 11 30.56 24 66.67 0.52 ขอท 33 7 19.44 31 86.11 0.83
ตารางท ค.3 รอยละกอนเรยนและหลงเรยนของขอสอบ FMCE แตละกลมค าถาม
กลมค าถาม รอยละ กอนเรยน
รอยละ หลงเรยน
<g>
แรงทกระท ำตอเลอน (Force Sled) 14.29 78.57 0.75 กำรเคลอนทกลบทศทำง (Reversing Direction)
8.02 58.95 0.55
กรำฟของแรง (Force Graphs) 23.96 60.76 0.48 กรำฟของควำมเรง (Acceleration Graphs) 28.89 64.44 0.50 กรำฟของควำมเรว (Velocity Graphs) 31.94 70.14 0.56

82
ภาคผนวก ง ตวอยางรปกจกรรม

83
ภาพท ง.1 การจดการเรยนการสอนของคร

84
ภาพท ง.2 นกเรยนสรางตวแทนความคดจากเลโก
85
ภาพท ง.3 นกเรยนถายภาพตวแทนความคดจากเลโก
86
ภาพท ง.4 นกเรยนท าแบบทดสอบ FMCE

87
ประวตผวจย ชอ นายพชตพล เพงพศ ประวตการศกษา พ.ศ. 2550–2553 มหาวทยาลยขอนแกน
วทยาศาสตรบณฑต สาขาวชาฟสกส พ.ศ. 2554 มหาวทยาลยขอนแกน
ประกาศนยบตรบณฑตวชาชพคร ประวตการท างาน พ.ศ. 2555–ปจจบน
คร โรงเรยนประสาทวทยาคาร อ าเภอปราสาท จงหวดสรนทร
ต าแหนง คร สถานทท างานปจจบน โรงเรยนประสาทวทยาคาร
อ าเภอปราสาท จงหวดสรนทร อเมล [email protected]