Embed Size (px)
Citation preview
รายงาน เรื่อง ระบบ DCS และ ระบบ SCADA
วิชา INDUSTRIAL DATA COMMUNICATION AND NETWORKS
สมาชิก
นายพงศกร สมคะเน 56010773
นายพิพัฒน์ ธรรมเนียม 56010863
นางสาววนิศรา แก้วนามชัย 56011050
นางสาวศตพร ส่องแสงเจริญ 56011172
นายสุทธิกานต์ ศรีละนนท ์ 56011339
น าเสนอ
ผศ.ดร.นรินทร์ ธรรมารักษ์วัฒนะ
ภาคเรียนที่ 2 ปีการศึกษา 2559
ภาควิชาวิศวกรรมการวัดคุม คณะวิศวกรรมศาสตร ์
ค าน า
รายงานเล่มนี้จัดท าขึ้นเพ่ือศึกษาเก่ียวกับระบบ DCS และ ระบบ SCADA ซึ่งจะกล่าวถึงในส่วนของโครงสร้างว่าล าดับชั้นของอุปกรณ์ในแต่ละระบบนั้นเป็นอย่างไรหลักการท างานจะมีการเริ่มต้นและสิ้นสุดกระบวนการอย่างไร และส่วนประกอบต่างๆ ของทั้งสองระบบ จึงพบว่าทั้งสองระบบนั้นมีความคล้ายคลึงกัน แต่จะแตกต่างในเรื่องของลักษณะการใช้งาน และในปัจจุบันการควบคุมการท างานในอุตสาหกรรมส่วนใหญ่จะมีการใช้งานระบบทั้งสองอย่างแพร่หลาย จึงจ าเป็นจะต้องศึกษาและท าความเข้าใจเกี่ยวกับโครงสร้างทั้งหมด หากมีความผิดพลาดประการใด ทางผู้จัดท าต้องขออภัยมา ณ ที่นี้ด้วย

สารบัญ
หน้า DCS DCS (Distributed Control System)…………………………………………………………………..... 1 ระบบการวัดและควบคุมในอุตสาหกรรม………………………………………………………………….. 1 DCS พ้ืนฐาน…………………………………………………………………………………………………………. 6 ระบบ Redundant……………………………………………………………………………………………….. 6 การใช้งาน DCS ในอุตสาหกรรม……………………………………………………………………………… 7 ส่วนประกอบของ DCS ใน Control System…………………………………………………………… 8 การท างานของซอฟแวร์ DCS………………………………………………………………………………….. 13 โปรแกรมของ DCS………………………………………………………………………………………………… 15 ฟังก์ชั่นการท างานของ DCS…………….....………………………………………………………………….. 16 ข้อดีของ DCS………………………………………………………………………………………………………… 19 ข้อเสียของ DCS…………………………………………………………………………………………………….. 20 DCS ที่นิยมใช้………………………………………………………………………………………………….……. 20 SCADA
SCADA (Supervisory Control And Data Acquisition)…………………………………………. 21 แนวคิดของระบบ…………………………………………………………………………………………………… 22 ส่วนประกอบของระบบ SCADA………………………………………………………………………………. 22 ฐานของข้อมูล SCADA…………………………………………………………………………………………… 27 มาตราฐาน Protocols ที่ใข้ใน SCADA……………………………………………………………………. 28 การแปลงข้อมูล SCADA Protocol………………………………………………………………………….. 29 สถาปัตยกรรม SCADA…………………………………………………………………………………………… 30 โครงสร้างของ SCADA (Architecture)……………………………………………………………………. 31 SCADA เหมาะสมกับงานประเภทใด………………………………………………………………………… 35 เปรียบเทียบ SCADA กับ DCS……………………………………………………………………………….. 37 คุณสมบัติของระบบ SCADA…………………………………………………………………………………… 37 สิ่งที่ควรพิจารณาในการใช้งานระบบ SCADA……………………………………………………………. 38 ประโยชน์ของการใช้งานระบบ SCADA…………………………………………………………………….. 39 สรุปลักษณะการท างานของระบบ SCADA……………………………………………………………….. 39 ตัวอย่างการใช้งาน SCADA……………………………………………………………………………………… 40
สารบัญรูป
หน้า รูปที่ 1 แผนผัง DCS………………………………………………………………………………………………. 1 รูปที่ 2 แผนผังระบบการวัดและควบคุมในอุตสาหกรรม…………………………………………….. 2 รูปที่ 3 Field Instrument……………………………………………………………………………………… 2 รูปที่ 4 Junction Box……………………………………………………………………………………………. 3 รูปที่ 5 Marshalling Cabinet………………………………………………………………………………… 3 รูปที่ 6 System Cabinet………………………………………………………………………………………. 4 รูปที่ 7 Operation Work Station.………………………………………………………………………… 5 รูปที่ 8 Engineering Work Station……………………………………………………………………….. 5 รูปที่ 9 ส่วนประกอบพ้ืนฐานของ DCS……………………………………………………………………… 6 รูปที่ 10 ระบบ Redundant Controller A ท างาน………………………………………………….. 7 รูปที่ 11 ระบบ Redundant Controller B ท างาน………………………………………………….. 7 รูปที่ 12 แผนผังการใช้งาน DCS ในอุตสาหกรรม…………………………………………………….… 8 รูปที่ 13 Controller………………………………………………………………………………………………. 9 รูปที่ 14 I/O Card…………………………………………………………………………………………………. 9 รูปที่ 15 I/O List From Instrument……………………………………………………………………… 10 รูปที่ 16 I/O List From Motor……………………………………………………………………………… 11 รูปที่ 17 Remote I/O……………………………………………………………………………………………. 12 รูปที่ 18 Marshalling Cabinet………………………………………………………………………………. 12 รูปที่ 19 DCS Software Map………………………………………………………………………………… 13 รปูที่ 20 Operation Work Station……………………………………………………………………….. 14 รูปที่ 21 Engineering Work Station……………………………………………………………………… 14 รูปที่ 22 Control Drawing……………………………………………………………………………………. 15 รูปที่ 23 HMI ของ DCS………………………………………………………………………………………….. 15 รูปที่ 24 PID Controller……………………………………………………………………………………….. 16 รูปที่ 25 Motor Controller…………………………………………………………………………………… 17 รูปที่ 26 Sequence Control………………………………………………………………………………… 17 รูปที่ 27 DCS Trend……………………………………………………………………………………………… 18 รูปที่ 28 DCS Alarm and Event…………………………………………………………………………… 19 รูปที่ 29 ภาพรวมของระบบ SCADA……………………………………………………………………….. 21 รูปที่ 30 เครื่องมือวัด หรือ เซนเซอร์ที่ใช้ในกระบวนการวัดค่าในอุตสาหกรรม………………. 23 รูปที่ 31 รูปแบบและลักษณะของ Remote Terminal Unit (RTU)……………………………. 24 รูปที่ 32 การเชื่อมต่อระหว่าง RTU กับเครื่องมือวัดต่างๆ………………………………………...... 26 รูปที่ 33 การสื่อสารของระบบ SCADA…………………………………………………………………….. 26 รูปที่ 34 ศูนย์กลางของระบบ SCADA……………………………………………………………………... 27
สารบัญรูป (ต่อ)
หน้า รูปที่ 35 การท างานในส่วนของการแปลงข้อมูลในระบบ SCADA…………………..……………. 29 รูปที่ 36 โครงสร้างแบบฮาร์ดแวร์ของระบบ SCADA………………………………………………….. 31 รูปที่ 37 โครงสร้างแบบซอร์ฟแวร์ของระบบ SCADA………………………………………….……… 32 รูปที่ 38 ลักษณะภาพรวมของ HMI…………………………………………………………………………. 35 รูปที่ 39 ลักษณะการท างานในส่วนของการตรวจสอบ……………………………………………….. 36 รูปที่ 40 ลักษณะการท างานในส่วนของการเก็บรวบรวมข้อมูล…………………...................... 36 รูปที่ 41 ลักษณะท างานในส่วนของการบริหารควบคุม………………………………………………. 36
1
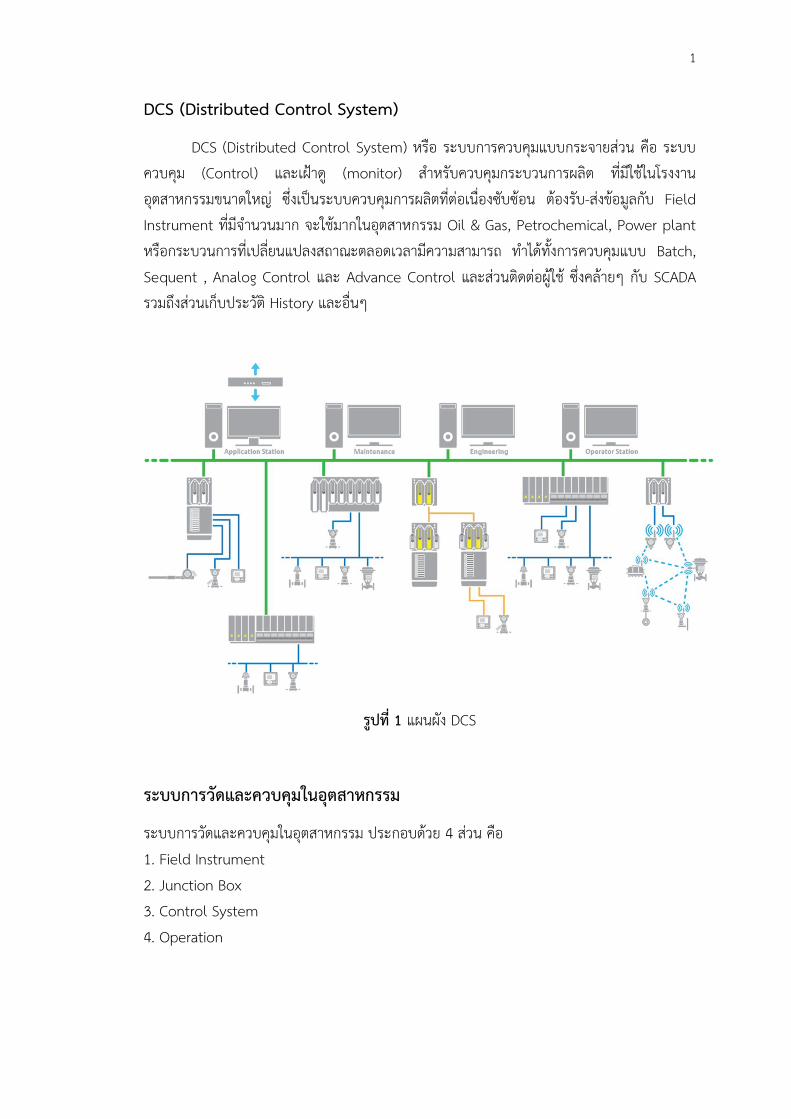
DCS (Distributed Control System)
DCS (Distributed Control System) หรือ ระบบการควบคุมแบบกระจายส่วน คือ ระบบควบคุม (Control) และเฝ้าดู (monitor) ส าหรับควบคุมกระบวนการผลิต ที่มีใช้ในโรงงานอุตสาหกรรมขนาดใหญ่ ซึ่งเป็นระบบควบคุมการผลิตที่ต่อเนื่องซับซ้อน ต้องรับ-ส่งข้อมูลกับ Field Instrument ที่มีจ านวนมาก จะใช้มากในอุตสาหกรรม Oil & Gas, Petrochemical, Power plant หรือกระบวนการที่เปลี่ยนแปลงสถาณะตลอดเวลามีความสามารถ ท าได้ทั้งการควบคุมแบบ Batch, Sequent , Analog Control และ Advance Control และส่วนติดต่อผู้ใช้ ซึ่งคล้ายๆ กับ SCADA รวมถึงส่วนเก็บประวัติ History และอ่ืนๆ
รูปที่ 1 แผนผัง DCS
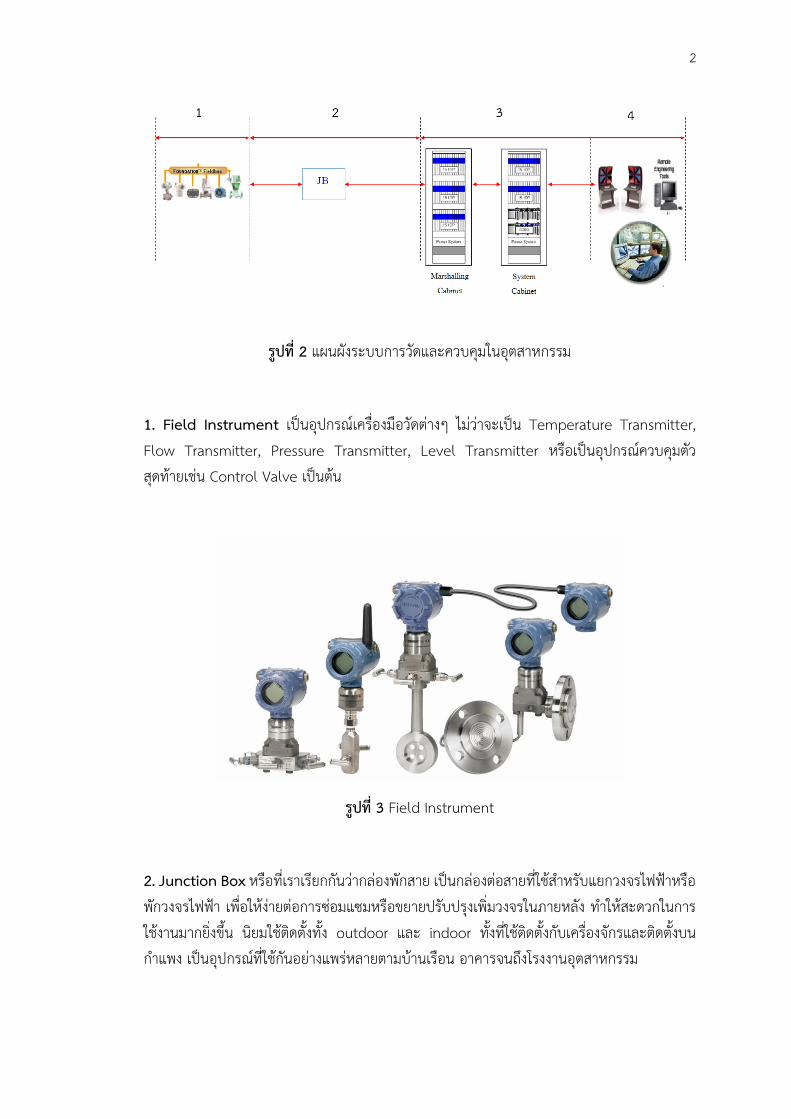
ระบบการวัดและควบคุมในอุตสาหกรรม
ระบบการวัดและควบคุมในอุตสาหกรรม ประกอบด้วย 4 ส่วน คือ 1. Field Instrument 2. Junction Box 3. Control System 4. Operation
2
รูปที่ 2 แผนผังระบบการวัดและควบคุมในอุตสาหกรรม
1. Field Instrument เป็นอุปกรณ์เครื่องมือวัดต่างๆ ไม่ว่าจะเป็น Temperature Transmitter, Flow Transmitter, Pressure Transmitter, Level Transmitter หรือเป็นอุปกรณ์ควบคุมตัวสุดท้ายเช่น Control Valve เป็นต้น
รูปที่ 3 Field Instrument
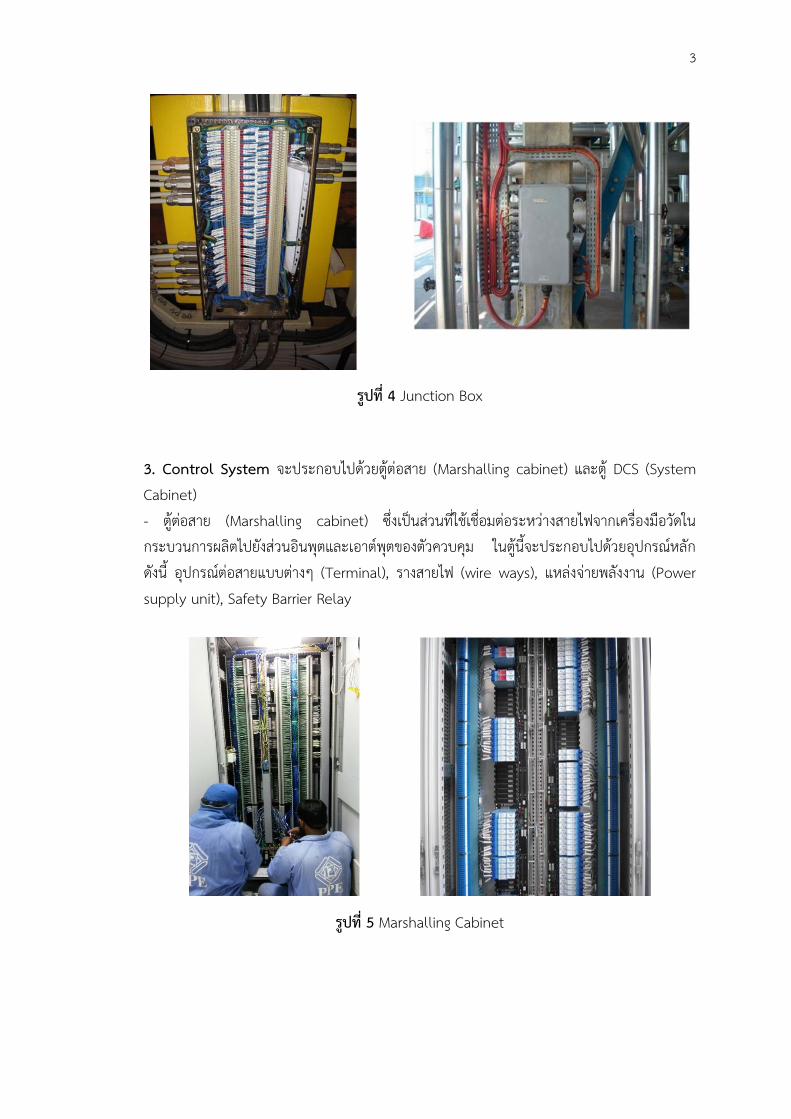
2. Junction Box หรือที่เราเรียกกันว่ากล่องพักสาย เป็นกล่องต่อสายที่ใช้ส าหรับแยกวงจรไฟฟ้าหรือพักวงจรไฟฟ้า เพ่ือให้ง่ายต่อการซ่อมแซมหรือขยายปรับปรุงเพิ่มวงจรในภายหลัง ท าให้สะดวกในการใช้งานมากยิ่งขึ้น นิยมใช้ติดตั้งทั้ง outdoor และ indoor ทั้งท่ีใช้ติดตั้งกับเครื่องจักรและติดตั้งบนก าแพง เป็นอุปกรณ์ท่ีใช้กันอย่างแพร่หลายตามบ้านเรือน อาคารจนถึงโรงงานอุตสาหกรรม
3
รูปที่ 4 Junction Box
3. Control System จะประกอบไปด้วยตู้ต่อสาย (Marshalling cabinet) และตู้ DCS (System Cabinet) - ตู้ต่อสาย (Marshalling cabinet) ซึ่งเป็นส่วนที่ใช้เชื่อมต่อระหว่างสายไฟจากเครื่องมือวัดในกระบวนการผลิตไปยังส่วนอินพุตและเอาต์พุตของตัวควบคุม ในตู้นี้จะประกอบไปด้วยอุปกรณ์หลักดังนี้ อุปกรณ์ต่อสายแบบต่างๆ (Terminal), รางสายไฟ (wire ways), แหล่งจ่ายพลังงาน (Power supply unit), Safety Barrier Relay
รูปที่ 5 Marshalling Cabinet
4
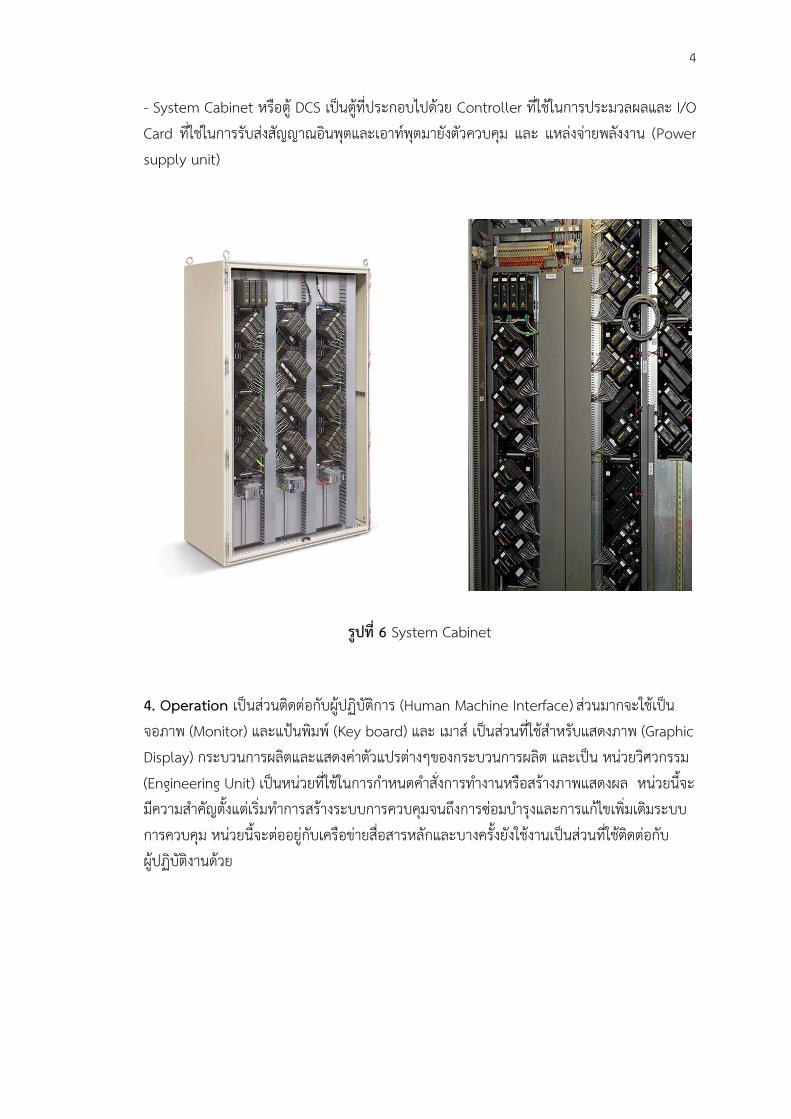
- System Cabinet หรือตู้ DCS เป็นตู้ที่ประกอบไปด้วย Controller ที่ใช้ในการประมวลผลและ I/O Card ที่ใช่ในการรับส่งสัญญาณอินพุตและเอาท์พุตมายังตัวควบคุม และ แหล่งจ่ายพลังงาน (Power supply unit)
รูปที่ 6 System Cabinet
4. Operation เป็นส่วนติดต่อกับผู้ปฏิบัติการ (Human Machine Interface) ส่วนมากจะใช้เป็นจอภาพ (Monitor) และแป้นพิมพ์ (Key board) และ เมาส์ เป็นส่วนที่ใช้ส าหรับแสดงภาพ (Graphic Display) กระบวนการผลิตและแสดงค่าตัวแปรต่างๆของกระบวนการผลิต และเป็น หน่วยวิศวกรรม (Engineering Unit) เป็นหน่วยที่ใช้ในการก าหนดค าสั่งการท างานหรือสร้างภาพแสดงผล หน่วยนี้จะมีความส าคัญตั้งแต่เริ่มท าการสร้างระบบการควบคุมจนถึงการซ่อมบ ารุงและการแก้ไขเพ่ิมเติมระบบการควบคุม หน่วยนี้จะต่ออยู่กับเครือข่ายสื่อสารหลักและบางครั้งยังใช้งานเป็นส่วนที่ใช้ติดต่อกับผู้ปฏิบัติงานด้วย
5
รูปที่ 7 Operation Work Station
รูปที่ 8 Engineering Work Station
6
DCS พื้นฐาน
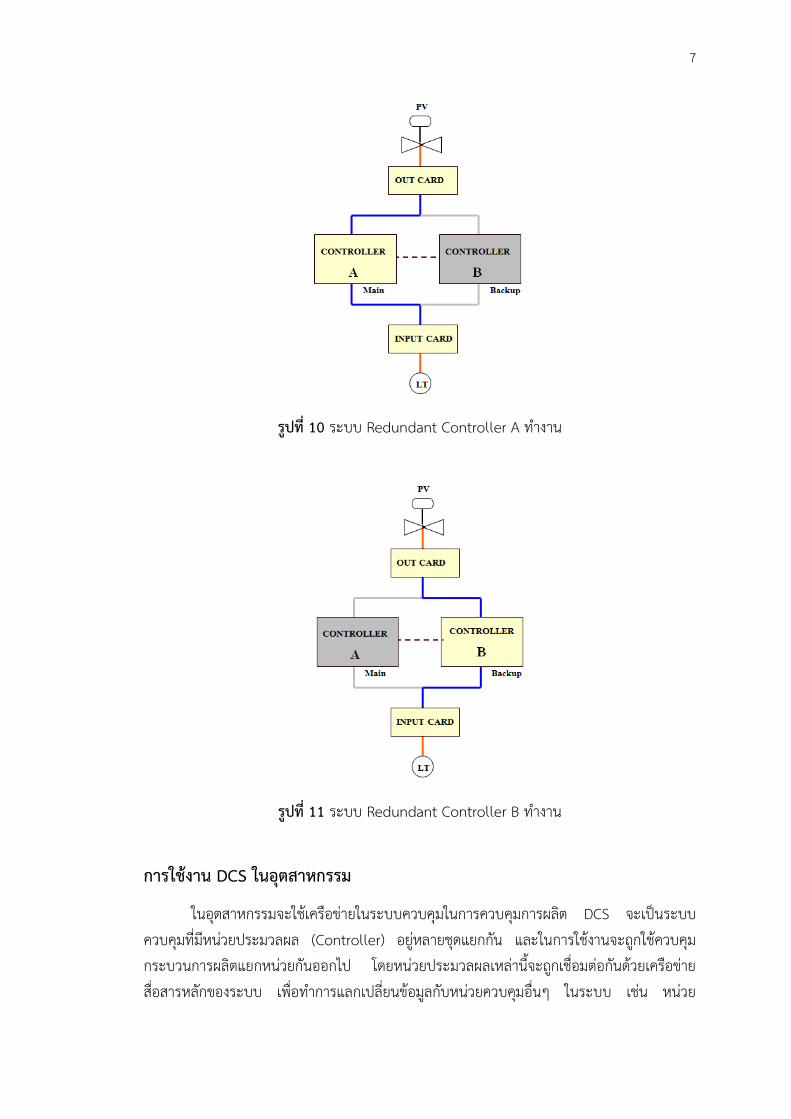
DCS พื้นฐานประกอบด้วย 5 ส่วน 1. Controller (ตัวประมวลผล) 2. I/O Card (โมดูลรับ/ส่งสัญญาณภายนอกกับระบบ DCS) 3. Data Bus (ระบบสื่อสาร) 4. Server (ฐานข้อมูลและการแก้ไขฟังก์ชั่นในการควบคุมกระบวนการผลิต) 5. Operate (ส่วนที่ติดต่อกับผู้ใช้งาน หรือ HMI) โดยที่ส่วนประกอบหน้าที่ทั้งหมดจะเป็นระบบ Redundant เพ่ือให้การรับส่งข้อมูลไม่เกิดความเสียหายต่อระบบ
รูปที่ 9 ส่วนประกอบพื้นฐานของ DCS
ระบบ Redundant
เป็นระบบ Backup การท างานของอุปกรณ์ให้ท างานได้อย่างต่อเนื่องหากอุปกรณ์ตัวหลักเสียไป เช่น Controller A ท างานแต่เม่ือเกิด Fail ที่ Controller A จะท าให้ Controller B ที่เป็น Backup ท างานทันที
7
รูปที ่10 ระบบ Redundant Controller A ท างาน
รูปที่ 11 ระบบ Redundant Controller B ท างาน
การใช้งาน DCS ในอุตสาหกรรม
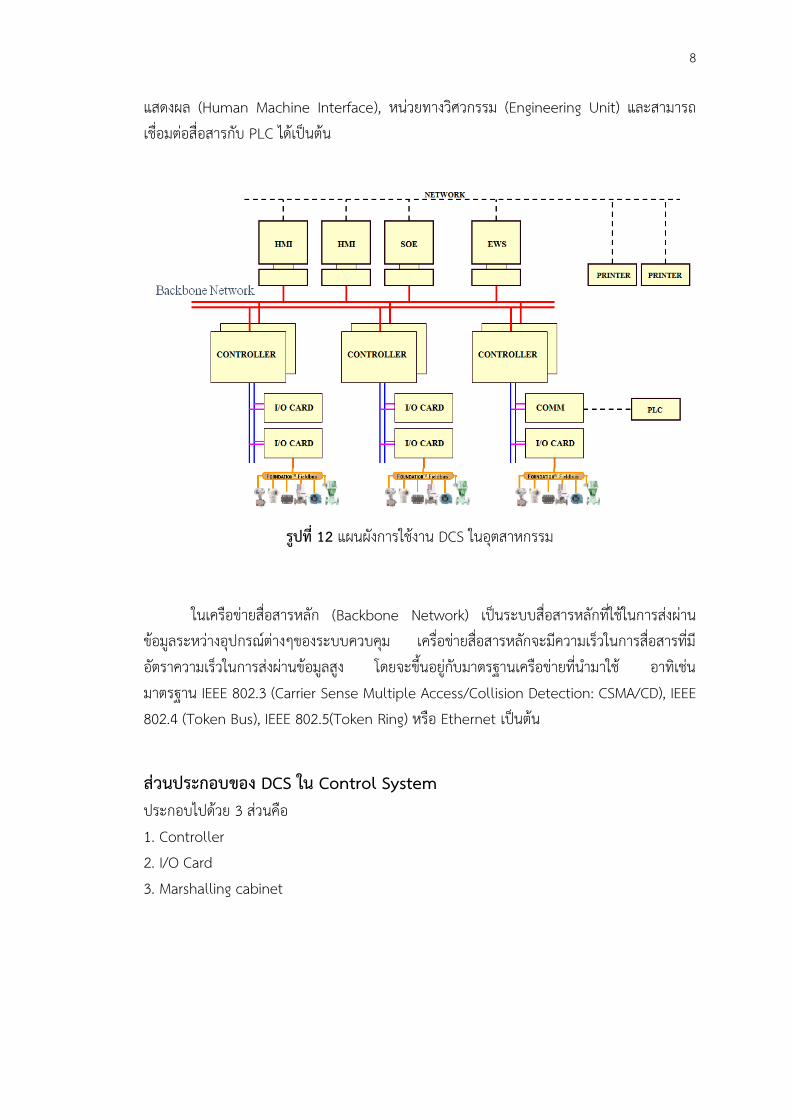
ในอุตสาหกรรมจะใช้เครือข่ายในระบบควบคุมในการควบคุมการผลิต DCS จะเป็นระบบควบคุมท่ีมีหน่วยประมวลผล (Controller) อยู่หลายชุดแยกกัน และในการใช้งานจะถูกใช้ควบคุมกระบวนการผลิตแยกหน่วยกันออกไป โดยหน่วยประมวลผลเหล่านี้จะถูกเชื่อมต่อกันด้วยเครือข่ายสื่อสารหลักของระบบ เพ่ือท าการแลกเปลี่ยนข้อมูลกับหน่วยควบคุมอ่ืนๆ ในระบบ เช่น หน่วย
8
แสดงผล (Human Machine Interface), หน่วยทางวิศวกรรม (Engineering Unit) และสามารถเชื่อมต่อสื่อสารกับ PLC ได้เป็นต้น
รูปที่ 12 แผนผังการใช้งาน DCS ในอุตสาหกรรม
ในเครือข่ายสื่อสารหลัก (Backbone Network) เป็นระบบสื่อสารหลักที่ใช้ในการส่งผ่านข้อมูลระหว่างอุปกรณ์ต่างๆของระบบควบคุม เครื่อข่ายสื่อสารหลักจะมีความเร็วในการสื่อสารที่มีอัตราความเร็วในการส่งผ่านข้อมูลสูง โดยจะข้ึนอยู่กับมาตรฐานเครือข่ายที่น ามาใช้ อาทิเช่น มาตรฐาน IEEE 802.3 (Carrier Sense Multiple Access/Collision Detection: CSMA/CD), IEEE 802.4 (Token Bus), IEEE 802.5(Token Ring) หรือ Ethernet เป็นต้น
ส่วนประกอบของ DCS ใน Control System ประกอบไปด้วย 3 ส่วนคือ 1. Controller 2. I/O Card 3. Marshalling cabinet
9
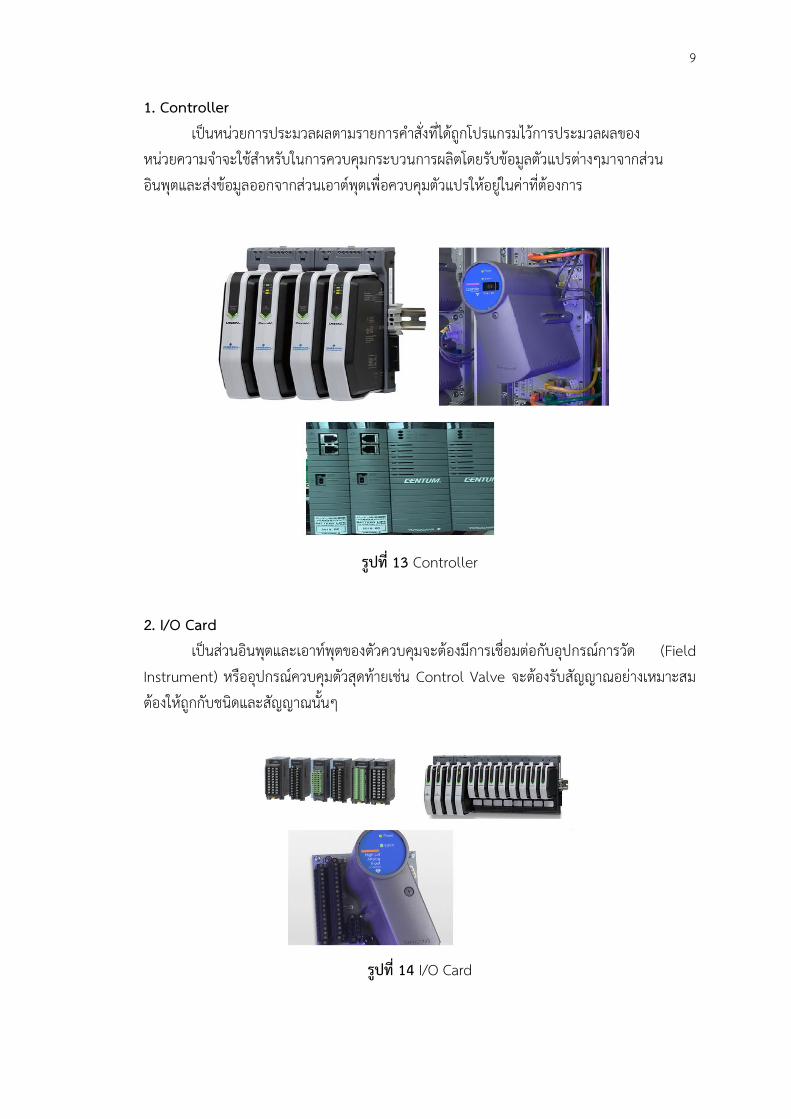
1. Controller เป็นหน่วยการประมวลผลตามรายการค าสั่งที่ได้ถูกโปรแกรมไว้การประมวลผลของหน่วยความจ าจะใช้ส าหรับในการควบคุมกระบวนการผลิตโดยรับข้อมูลตัวแปรต่างๆมาจากส่วนอินพุตและส่งข้อมูลออกจากส่วนเอาต์พุตเพ่ือควบคุมตัวแปรให้อยู่ในค่าที่ต้องการ
รูปที่ 13 Controller
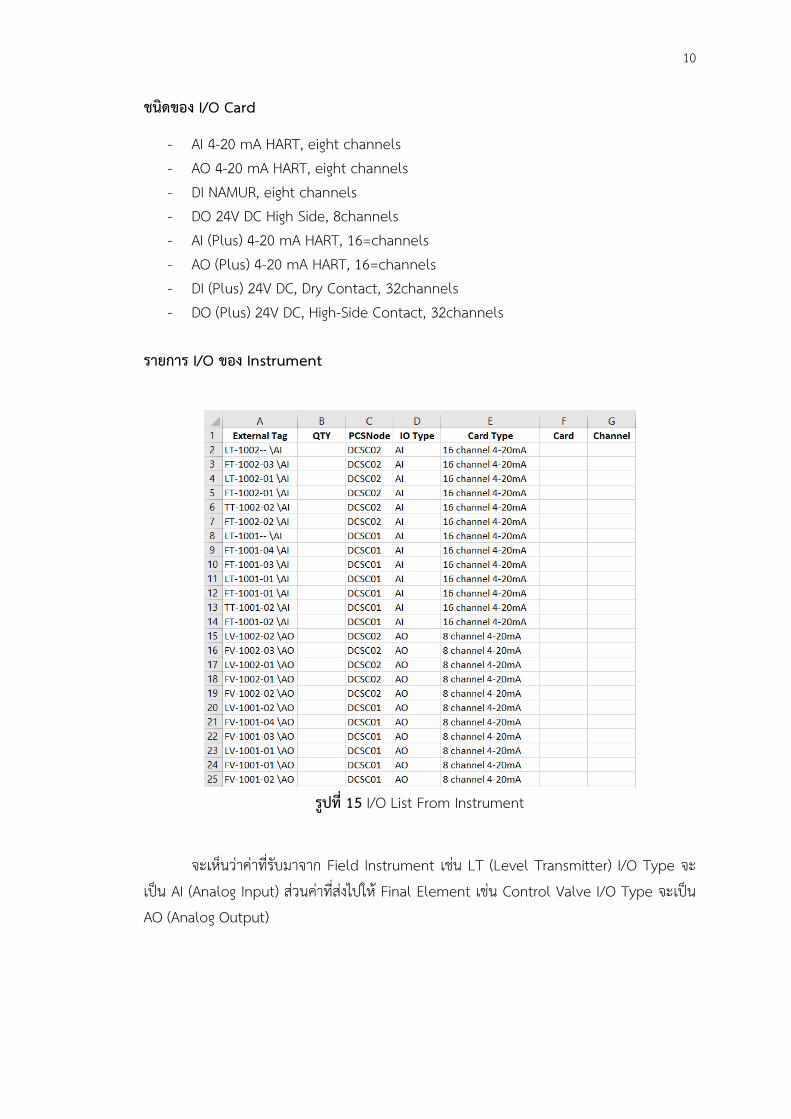
2. I/O Card เป็นส่วนอินพุตและเอาท์พุตของตัวควบคุมจะต้องมีการเชื่อมต่อกับอุปกรณ์การวัด (Field Instrument) หรืออุปกรณ์ควบคุมตัวสุดท้ายเช่น Control Valve จะตอ้งรับสัญญาณอย่างเหมาะสมต้องให้ถูกกับชนิดและสัญญาณนั้นๆ
รูปที่ 14 I/O Card
10
ชนิดของ I/O Card
- AI 4-20 mA HART, eight channels - AO 4-20 mA HART, eight channels - DI NAMUR, eight channels - DO 24V DC High Side, 8channels - AI (Plus) 4-20 mA HART, 16=channels - AO (Plus) 4-20 mA HART, 16=channels - DI (Plus) 24V DC, Dry Contact, 32channels - DO (Plus) 24V DC, High-Side Contact, 32channels
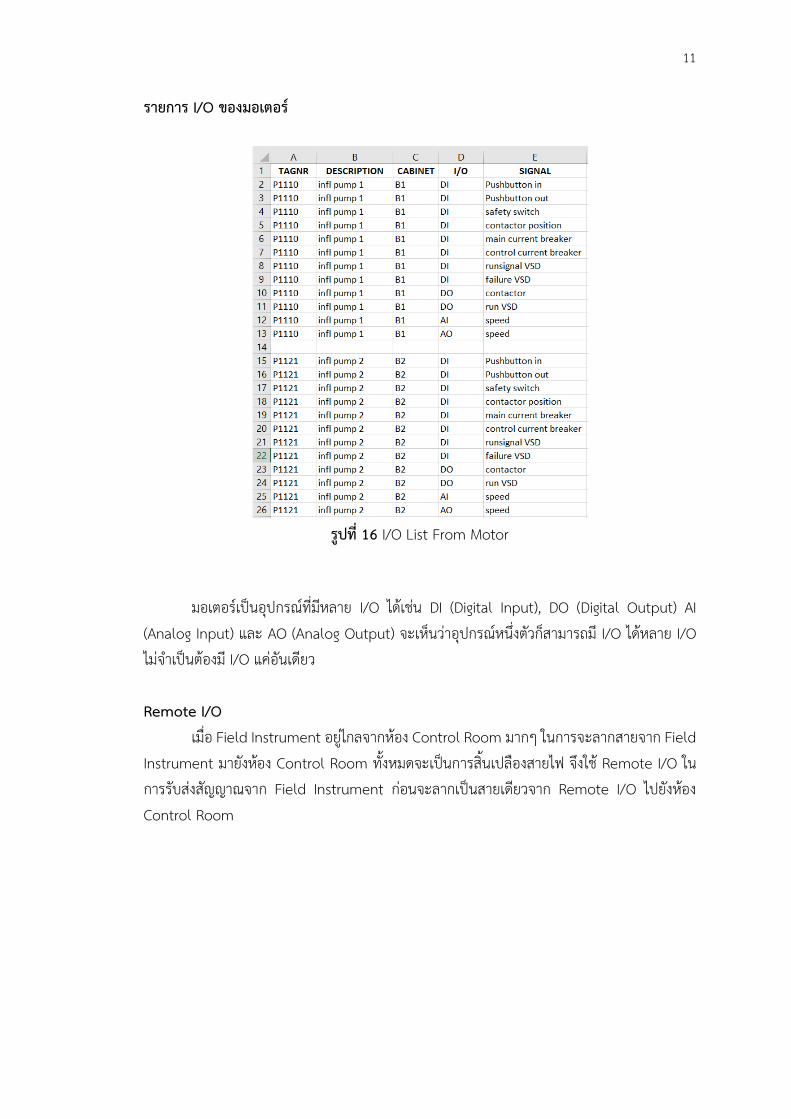
รายการ I/O ของ Instrument
รูปที่ 15 I/O List From Instrument
จะเห็นว่าค่าท่ีรับมาจาก Field Instrument เช่น LT (Level Transmitter) I/O Type จะเป็น AI (Analog Input) ส่วนค่าที่ส่งไปให้ Final Element เช่น Control Valve I/O Type จะเป็น AO (Analog Output)
11
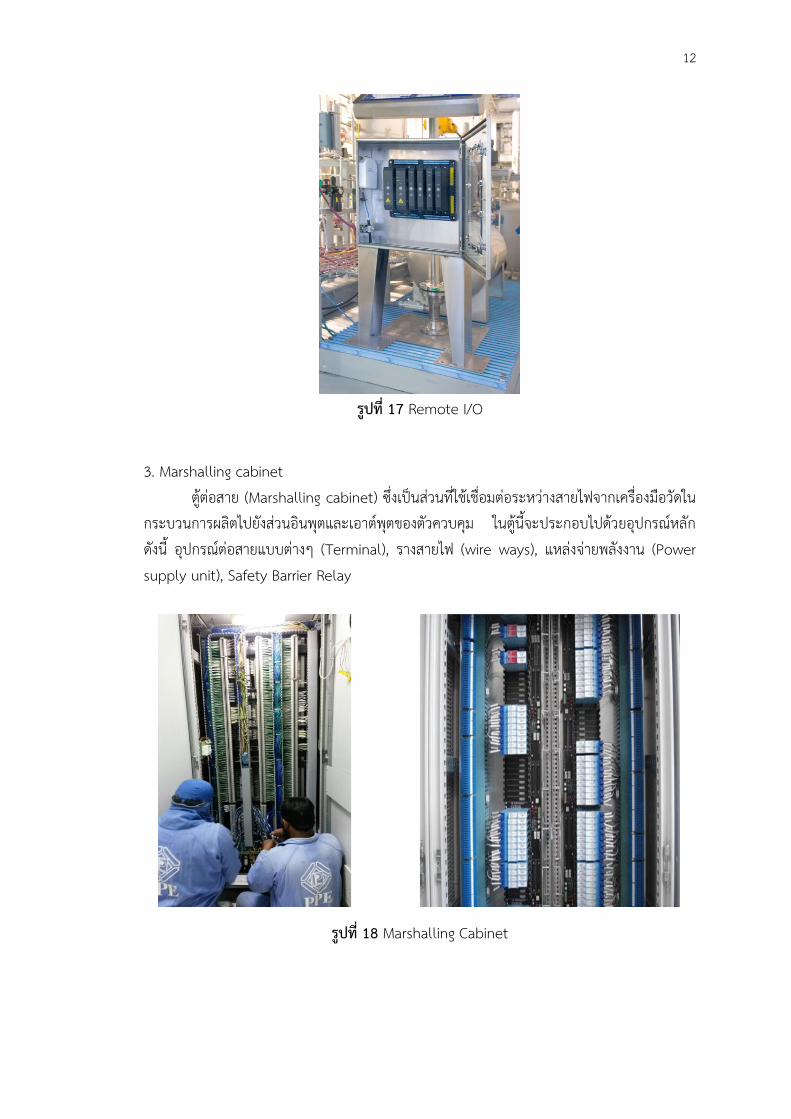
รายการ I/O ของมอเตอร์
รูปที่ 16 I/O List From Motor
มอเตอร์เป็นอุปกรณ์ที่มีหลาย I/O ได้เช่น DI (Digital Input), DO (Digital Output) AI (Analog Input) และ AO (Analog Output) จะเห็นว่าอุปกรณ์หนึ่งตัวก็สามารถมี I/O ได้หลาย I/O ไม่จ าเป็นต้องมี I/O แค่อันเดียว Remote I/O เมื่อ Field Instrument อยู่ไกลจากห้อง Control Room มากๆ ในการจะลากสายจาก Field Instrument มายังห้อง Control Room ทั้งหมดจะเป็นการสิ้นเปลืองสายไฟ จึงใช้ Remote I/O ในการรับส่งสัญญาณจาก Field Instrument ก่อนจะลากเป็นสายเดียวจาก Remote I/O ไปยังห้อง Control Room
12
รูปที่ 17 Remote I/O
3. Marshalling cabinet ตู้ต่อสาย (Marshalling cabinet) ซึ่งเป็นส่วนที่ใช้เชื่อมต่อระหว่างสายไฟจากเครื่องมือวัดในกระบวนการผลิตไปยังส่วนอินพุตและเอาต์พุตของตัวควบคุม ในตู้นี้จะประกอบไปด้วยอุปกรณ์หลักดังนี้ อุปกรณ์ต่อสายแบบต่างๆ (Terminal), รางสายไฟ (wire ways), แหล่งจ่ายพลังงาน (Power supply unit), Safety Barrier Relay
รูปที่ 18 Marshalling Cabinet

13
การท างานของซอฟแวร์ DCS
รูปที่ 19 DCS Software Map
1.Configuration เป็นส่วนก าหนดข้อมูลเพ่ือควบคุมกระบวนการท างาน การตั้งค่าการท างานของโปรแกรมในการควบคุม รวมถึงการเขียนโปรแกรมท่ีใช้ในการควบคุม และสามารถแก้ไขโปรแกรมได้ในส่วนนี้เท่านั้น 2.Operation เป็นส่วนหน่วยแสดงผลหรือ HMI (Human Machine Interface) ที่ใช้ในการควบคุมและดูค่าต่างๆในกระบวนการผลิต สามารถตั้งค่าเป้าหมายในกระบวนการผลิต หรือแสดงค่าท่ีผิดปกติจากกระบวนการเป็นการแจ้งเตือน (Alarm) แต่จะไม่สามารถแก้ไขโปรแกรมในการควบคุมจากส่วนนี้ได้ 3.Enterprise เป็นส่วนที่วิเคราะห์ผลที่เก่ียวกับธุรกิจขององค์กรและการตัดสินใจในการผลิตโดยแบ่งเป็น ERP และ MES - ERP (Enterprise Resource Planning) คือการวางแผนทรัพยากรทางธุรกิจขององค์กรโดยรวม เพ่ือให้เกิดการใช้ประโยชน์ได้อย่างสูงสุดของทรัพยากรทางธุรกิจขององค์กร - MES (Manufacturing Execution Systems) คือ ระบบประมวลผลสถานะและการผลิตเครื่องจักร สามารถให้ข้อมูลที่ถูกต้องในเวลาที่เหมาะสมและแสดงการตัดสินใจการผลิต

14
4.Analysis & Reporting เป็นส่วนที่เก็บบันทึกค่า (History) ในกระบวนการมาวิเคราะห์และรายงานดู Trend ของกระบวนการเพ่ือใช้ในการปรับปรุงกระบวนการผลิตต่อไป ให้กระบวนการผลิตมีประสิทธิภาพมากข้ึน
รูปที่ 20 Operation Work Station
รูปที่ 21 Engineering Work Station
15
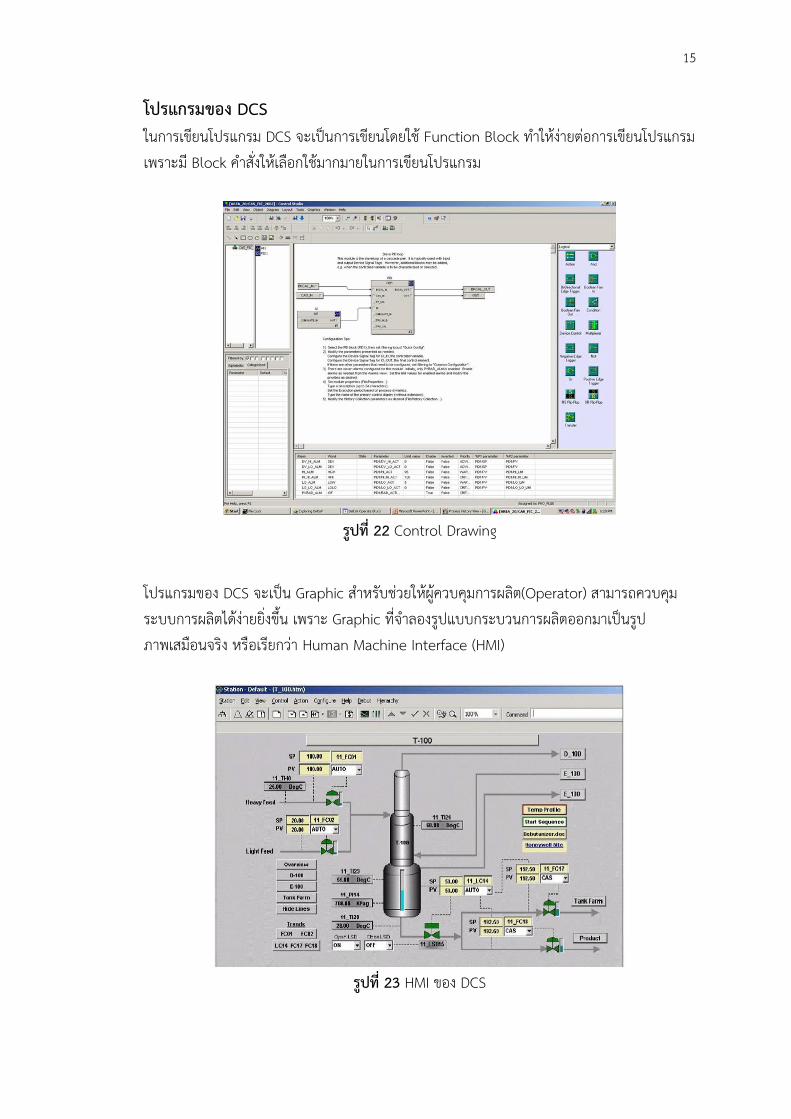
โปรแกรมของ DCS ในการเขียนโปรแกรม DCS จะเป็นการเขียนโดยใช้ Function Block ท าให้ง่ายต่อการเขียนโปรแกรมเพราะมี Block ค าสั่งให้เลือกใช้มากมายในการเขียนโปรแกรม
รูปที่ 22 Control Drawing
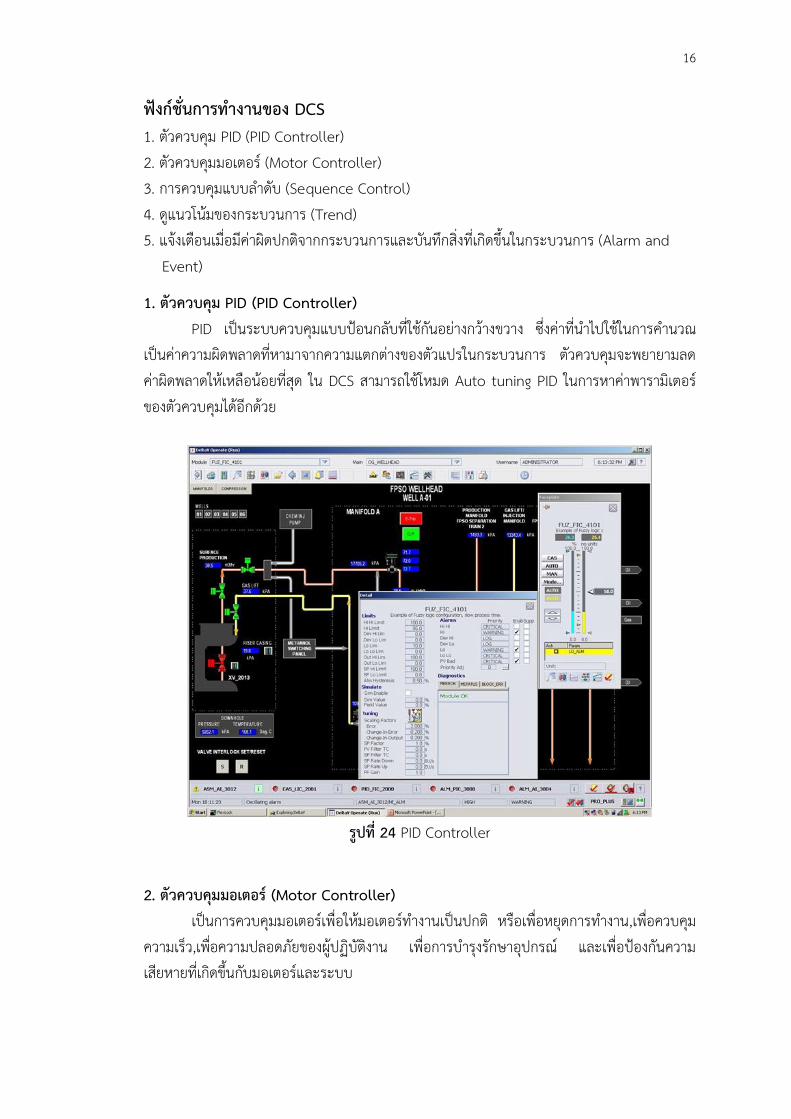
โปรแกรมของ DCS จะเป็น Graphic ส าหรับช่วยให้ผู้ควบคุมการผลิต(Operator) สามารถควบคุมระบบการผลิตได้ง่ายยิ่งขึ้น เพราะ Graphic ที่จ าลองรูปแบบกระบวนการผลิตออกมาเป็นรูปภาพเสมือนจริง หรือเรียกว่า Human Machine Interface (HMI)
รูปที่ 23 HMI ของ DCS
16
ฟังก์ชั่นการท างานของ DCS 1. ตัวควบคุม PID (PID Controller) 2. ตัวควบคุมมอเตอร์ (Motor Controller) 3. การควบคุมแบบล าดับ (Sequence Control) 4. ดูแนวโน้มของกระบวนการ (Trend) 5. แจ้งเตือนเมื่อมีค่าผิดปกติจากกระบวนการและบันทึกสิ่งที่เกิดขึ้นในกระบวนการ (Alarm and Event)
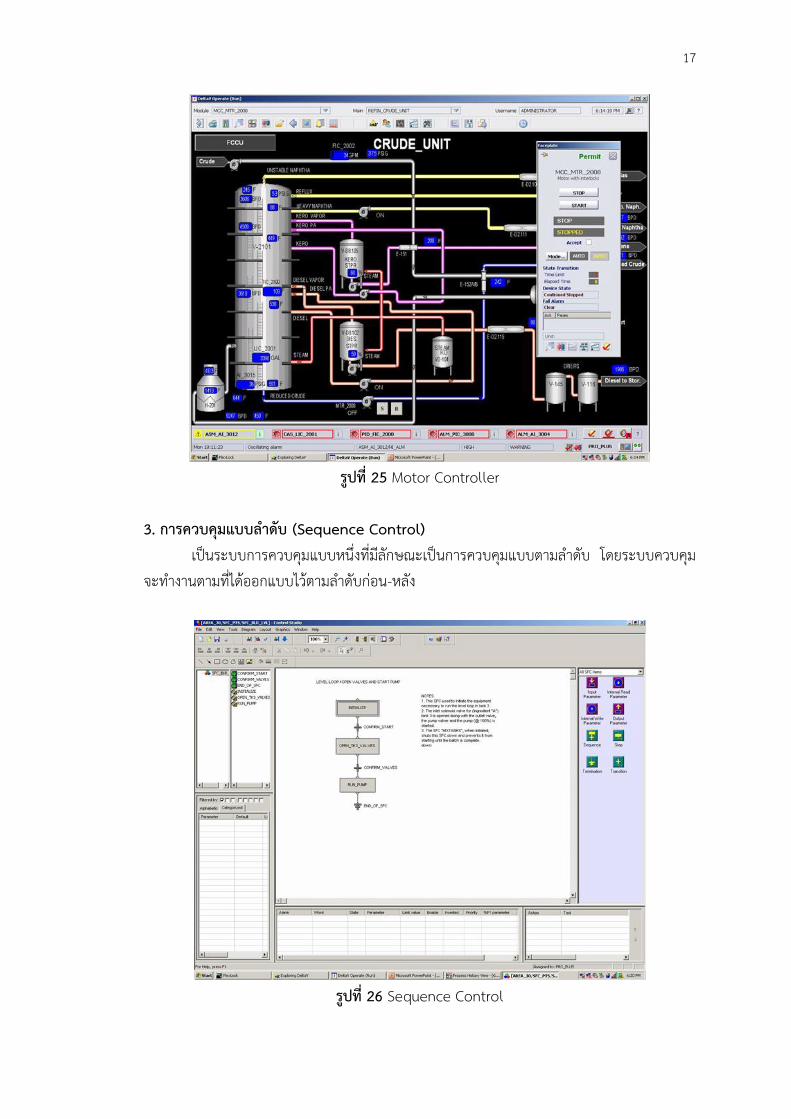
1. ตัวควบคุม PID (PID Controller) PID เป็นระบบควบคุมแบบป้อนกลับที่ใช้กันอย่างกว้างขวาง ซึ่งค่าที่น าไปใช้ในการค านวณเป็นค่าความผิดพลาดที่หามาจากความแตกต่างของตัวแปรในกระบวนการ ตัวควบคุมจะพยายามลดค่าผิดพลาดให้เหลือน้อยที่สุด ใน DCS สามารถใช้โหมด Auto tuning PID ในการหาค่าพารามิเตอร์ของตัวควบคุมได้อีกด้วย
รูปที่ 24 PID Controller
2. ตัวควบคุมมอเตอร์ (Motor Controller) เป็นการควบคุมมอเตอร์เพ่ือให้มอเตอร์ท างานเป็นปกติ หรือเพ่ือหยุดการท างาน,เพ่ือควบคุมความเร็ว,เพ่ือความปลอดภัยของผู้ปฏิบัติงาน เพ่ือการบ ารุงรักษาอุปกรณ์ และเพ่ือป้องกันความเสียหายที่เกิดข้ึนกับมอเตอร์และระบบ
17
รูปที่ 25 Motor Controller
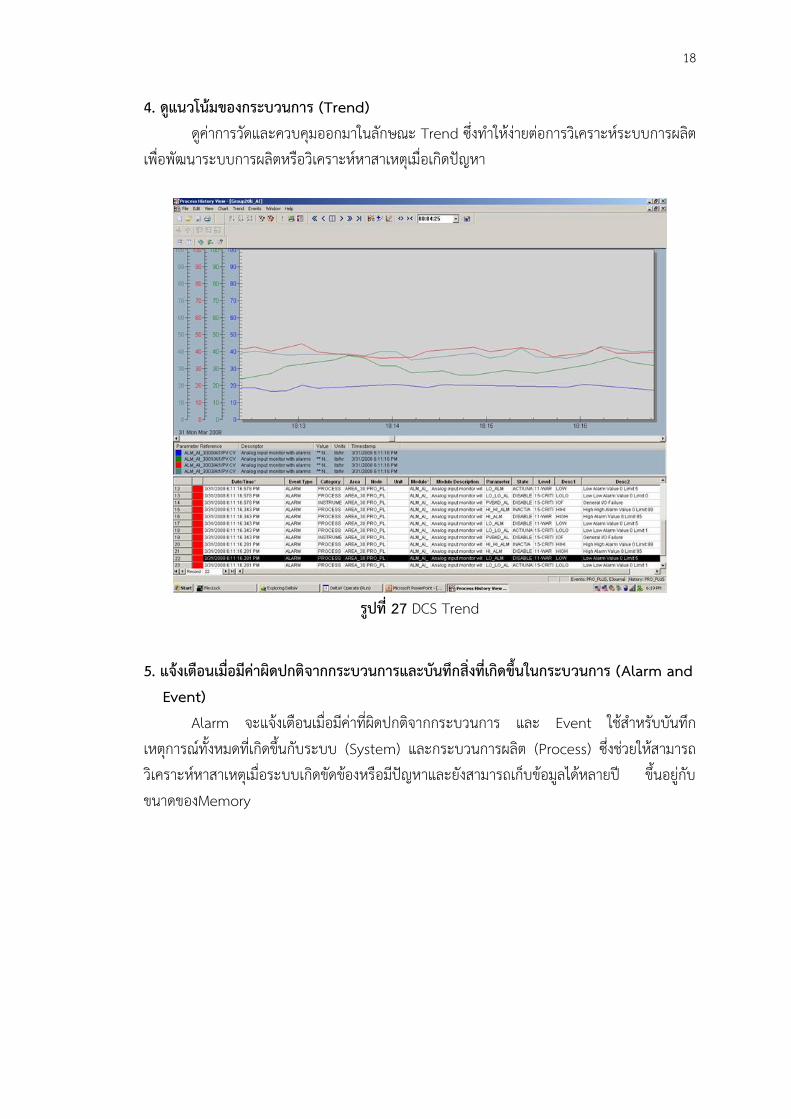
3. การควบคุมแบบล าดับ (Sequence Control) เป็นระบบการควบคุมแบบหนึ่งที่มีลักษณะเป็นการควบคุมแบบตามล าดับ โดยระบบควบคุมจะท างานตามท่ีได้ออกแบบไว้ตามล าดับก่อน-หลัง
รูปที่ 26 Sequence Control
18
4. ดูแนวโน้มของกระบวนการ (Trend) ดูค่าการวัดและควบคุมออกมาในลักษณะ Trend ซึ่งท าให้ง่ายต่อการวิเคราะห์ระบบการผลติเพ่ือพัฒนาระบบการผลิตหรือวิเคราะห์หาสาเหตุเมื่อเกิดปัญหา
รูปที่ 27 DCS Trend
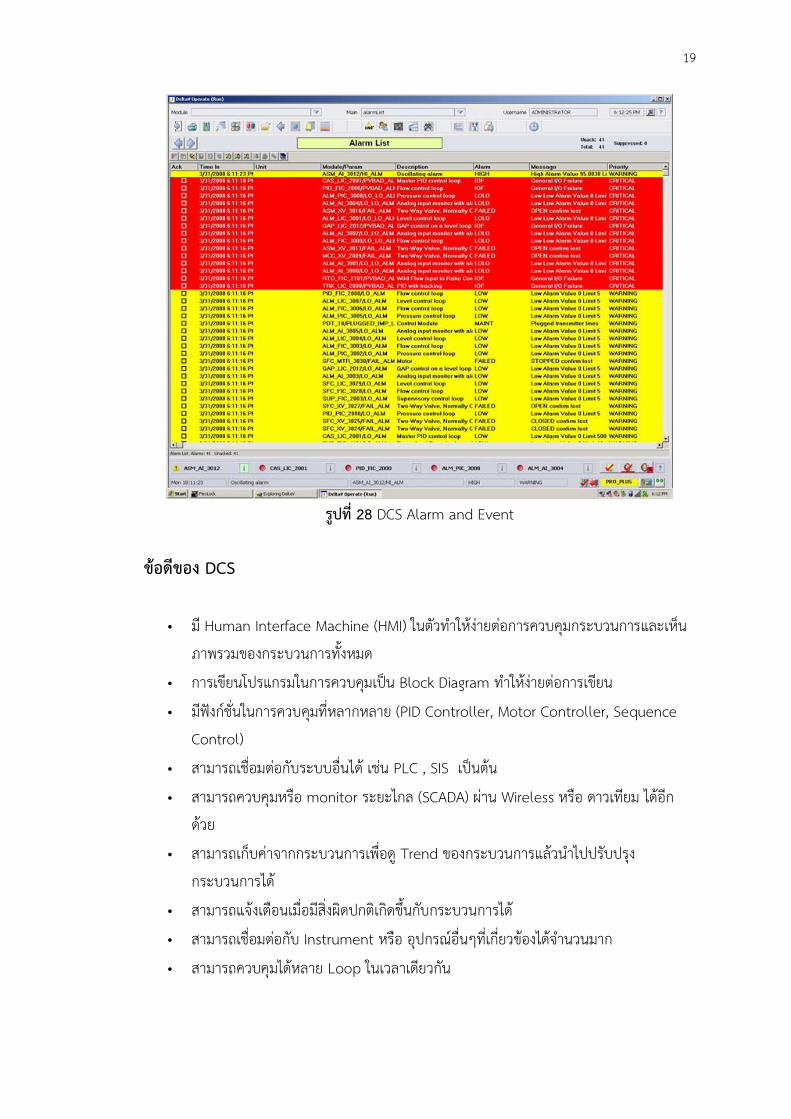
5. แจ้งเตือนเม่ือมีค่าผิดปกติจากกระบวนการและบันทึกสิ่งท่ีเกิดขึ้นในกระบวนการ (Alarm and Event) Alarm จะแจ้งเตือนเมื่อมีค่าที่ผิดปกติจากกระบวนการ และ Event ใช้ส าหรับบันทึกเหตุการณ์ทั้งหมดที่เกิดข้ึนกับระบบ (System) และกระบวนการผลิต (Process) ซึ่งชว่ยให้สามารถวิเคราะห์หาสาเหตุเมื่อระบบเกิดขัดข้องหรือมีปัญหาและยังสามารถเก็บข้อมูลได้หลายปี ขึ้นอยู่กับขนาดของMemory
19
รูปที่ 28 DCS Alarm and Event
ข้อดีของ DCS
• มี Human Interface Machine (HMI) ในตัวท าให้ง่ายต่อการควบคุมกระบวนการและเห็นภาพรวมของกระบวนการทั้งหมด
• การเขียนโปรแกรมในการควบคุมเป็น Block Diagram ท าให้ง่ายต่อการเขียน • มีฟังก์ชั่นในการควบคุมที่หลากหลาย (PID Controller, Motor Controller, Sequence
Control) • สามารถเชื่อมต่อกับระบบอ่ืนได้ เช่น PLC , SIS เป็นต้น • สามารถควบคุมหรือ monitor ระยะไกล (SCADA) ผ่าน Wireless หรือ ดาวเทียม ได้อีก
ด้วย • สามารถเก็บค่าจากกระบวนการเพื่อดู Trend ของกระบวนการแล้วน าไปปรับปรุง
กระบวนการได้ • สามารถแจ้งเตือนเมื่อมีสิ่งผิดปกติเกิดขึ้นกับกระบวนการได้ • สามารถเชื่อมต่อกับ Instrument หรือ อุปกรณ์อ่ืนๆที่เกี่ยวข้องได้จ านวนมาก • สามารถควบคุมได้หลาย Loop ในเวลาเดียวกัน
20
ข้อเสียของ DCS
• ราคาแพง • เมื่อเกิดปัญหาจะตรวจสอบได้ยากเนื่องจากเป็นระบบขนาดใหญ่ต้องใช้ผู้เชี่ยวชาญในการ
ตรวจสอบ • เมื่ออุปกรณ์เสียต้องใช้เวลาในการสั่งซื้อของเพราะอุปกรณ์ทั้งหมดไม่ผลิตที่ประเทศไทย
DCS ที่นิยมใช ้
• Yokogawa (Centum VP) • Siemens (PCS 7) • Honeywell (Experion LX) • Emerson (Delta V)
21
SCADA
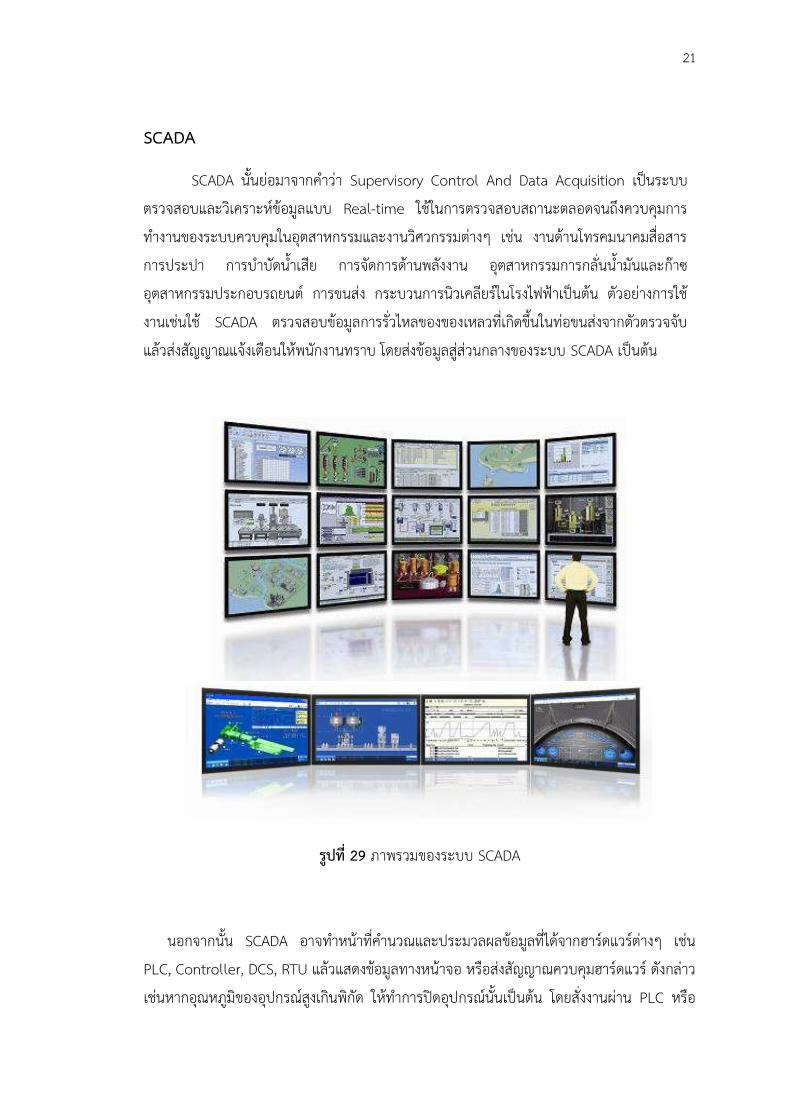
SCADA นั้นย่อมาจากค าว่า Supervisory Control And Data Acquisition เป็นระบบตรวจสอบและวิเคราะห์ข้อมูลแบบ Real-time ใช้ในการตรวจสอบสถานะตลอดจนถึงควบคุมการท างานของระบบควบคุมในอุตสาหกรรมและงานวิศวกรรมต่างๆ เช่น งานด้านโทรคมนาคมสื่อสาร การประปา การบ าบัดน้ าเสีย การจัดการด้านพลังงาน อุตสาหกรรมการกลั่นน้ ามันและก๊าซ อุตสาหกรรมประกอบรถยนต์ การขนส่ง กระบวนการนิวเคลียร์ในโรงไฟฟ้าเป็นต้น ตัวอย่างการใช้งานเช่นใช้ SCADA ตรวจสอบข้อมูลการรั่วไหลของของเหลวที่เกิดขึ้นในท่อขนส่งจากตัวตรวจจับแล้วส่งสัญญาณแจ้งเตือนให้พนักงานทราบ โดยส่งข้อมูลสู่ส่วนกลางของระบบ SCADA เป็นต้น
รูปที ่29 ภาพรวมของระบบ SCADA
นอกจากนั้น SCADA อาจท าหน้าที่ค านวณและประมวลผลข้อมูลที่ได้จากฮาร์ดแวร์ต่างๆ เช่น PLC, Controller, DCS, RTU แล้วแสดงข้อมูลทางหน้าจอ หรือส่งสัญญาณควบคุมฮาร์ดแวร์ ดังกล่าว เช่นหากอุณหภูมิของอุปกรณ์สูงเกินพิกัด ให้ท าการปิดอุปกรณ์นั้นเป็นต้น โดยสั่งงานผ่าน PLC หรือ
22
Controller ที่ติดต่ออยู่ ทั้งนี้ SCADA สามารถเก็บรวบรวมข้อมูลที่ได้จากระบบควบคุมทั้งหมดไว้ในฐานข้อมูลเพ่ือให้พนักงานหรือโปรแกรมอ่ืนๆ สามารถน าไปใช้งานได้ SCADA นั้นเข้าไปมีส่วนในงานควบคุมท้ังเล็กและใหญ่ที่ต้องการแสดงผล แลกเปลี่ยนข้อมูล หรือควบคุมระบบต่างๆ จากส่วนกลาง เพ่ือการท างานของระบบรวมที่สัมพันธ์กัน มองเห็นภาพรวมได้อย่างชัดเจนและมีความรวดเร็วต่อเหตุการณ์ต่างๆ ที่เกิดข้ึน ระบบ SCADA ในปัจจุบันมีความสามารถในการสื่อสาร ควบคุม และประมวลผลข้อมูลจาก I/O ของอุปกรณ์เช่น PLC, DCS, RTU ได้ถึงระดับที่เกินหนึ่งแสน I/O แล้ว และได้รับการพัฒนาให้มีความสามารถรองรับความต้องการใหม่ๆ ของผู้ใช้งานอย่างต่อเนื่องตลอดมา
SCADA เริ่มใช้งานในคอมพิวเตอร์ตั้งแต่ระบบปฏิบัติการ DOS, VMS และ UNIX จนมาถึงระบบปฏิบัติการ Windows NT, XP, Server 2003 และ LINUX
แนวคิดของระบบ
SCADA มักจะหมายถึงระบบส่วนกลางที่ตรวจสอบและควบคุมสถานประกอบการโดยรวมทั้งหมดหรือความสลับซับซ้อนของระบบที่กระจายออกไปในพื้นที่ขนาดใหญ่ (ตั้งแต่โรงงานเล็กๆถึงระดับชาติ) ส่วนใหญ่การด าเนินการเพื่อควบคุมจะด าเนินการโดยอัตโนมัติโดย RTUs หรือ PLCs ฟังก์ชันการควบคุมของแม่ข่ายมักจะถูกจ ากัดแค่การแทรกแซงในระดับพื้นฐานหรือการแทรกแซงระดับก ากับดูแล ตัวอย่างเช่น PLC อาจควบคุมการไหลของน้ าหล่อเย็นผ่านส่วนใดๆของกระบวนการอุตสาหกรรม แต่ระบบ SCADA อาจอนุญาตให้ผู้ใช้งานในการเปลี่ยน set point (อุณหภูมิที่มีนัยส าคัญของขั้นตอนการผลิตเฉพาะของผลิตภัณฑ์นั้น) ส าหรับการไหลได้ และเปิดใช้งานเงื่อนไขการเตือนเช่นการขาดหายของการไหลหรืออุณหภูมิที่สูงเกินไป จะแสดงและบันทึก วงรอบของการควบคุมจะถูกกระท าผ่าน RTU หรือ PLC ในขณะที่ระบบ SCADA ตรวจสอบประสิทธิภาพโดยรวมของวงรอบนั้น
ส่วนประกอบของระบบ SCADA ระบบ SCADA มักจะประกอบด้วยระบบย่อยต่อไปนี้
Field Instrumentation
เป็นเครื่องมือวัด หรือ เซนเซอร์ที่เชื่อมต่อกับเครื่องจักร หรือ อาจเป็นอุปกรณ์ที่ถูกควบคุมโดยอุปกรณ์เหล่านี้จะเปลี่ยนจาก Physical Parameter เช่น Fluid Flow, Velocity, Fluid Level ให้เป็น Electrical Signal เช่น Voltage หรือ Current ซึ่งสามารถอ่านค่าเหล่านี้ได้โดย Remote Station Equipment ผลลัพธ์ที่ได้เป็นได้ทั้ง Analog และ Digital

23
รูปที ่30 เครื่องมือวัด หรือ เซนเซอร์ที่ใช้ในกระบวนการวัดค่าในอุตสาหกรรม
Remote Station
เป็นส่วนที่ท าการรวบรวมข้อมูลจากเครื่องมือวัดหรืออุปกรณ์ และส่งไปยังศูนย์กลางของระบบ SCADA ซึ่งอาจจะเป็น Remote Terminal Unit (RTU) หรือ Programmable Logic Controller (PLC) ก็ได้ โดย RTU คืออุปกรณ์ท่ีใช้ในการตรวจจับสัญญาณจาก Field Sensor แล้ว ส่งสัญญาณข้อมูลให้ Controller ควบคุมอุปกรณ์

24
รูปที ่31 รูปแบบและลักษณะของ Remote Terminal Unit (RTU)
Remote Station แบ่งเป็น 2 ประเภท คือ
1) Single Board : input และ output เป็น Fixed Number จะมีราคาถูกแต่ไม่สามารถรองรับการขยายของระบบ สมัยใหม่ได้
2) Modular Board : สามารถรองรับการขยาย Remote Station ได้ แต่ราคาค่อนข้างแพง
ส่วนประกอบหลักของ RTU ที่ส าคัญมีอยู่ 3 ส่วนดังต่อไปนี้
1) Central Processing Unit (CPU) ของ RTU หน้าที่หลัก คือ - ท าหน้าที่ในการประมวลผลสัญญาณที่รับมาจาก Filed Instrument โดย
สัญญาณที่ได้รับมาจาก Field Instrument จะถูกต่อเข้ากับ I/O Module ตามมาตรฐานสัญญาณต่างๆ เช่น สัญญาณ Analog 4 – 20 mA. หรือ
25
สัญญาณ Digital On – Off โดยเมื่อ CPU รับสัญญาณจาก Module ที่ต่อผ่าน I/O Bus แล้วจะท าการประมวลผลโดยสัญญาณ Analog จะถูกแปลงเป็นค่า Digital โดยใช้Analog to Digital Converter แล้วน าไปประมวลผลต่อไป
- ท าหน้าที่ในการประมวลผลข้อมูลต่างๆที่ได้รับจาก I/O Module เพ่ือที่จะส่งข้อมูลให้กับศูนย์ควบคุม และท าหน้าที่แปลงค าสั่งจากศูนย์ควบคุมเพ่ือใช้ในการควบคุมอุปกรณ์ต่าง ๆ ที่ติดตั้งอยู่ที่สถานีสนาม
- ท าหน้าที่ในการควบคุมระบบการสื่อสารระหว่าง RTU กับศูนย์ควบคุม โดยผ่าน Port ในการสื่อสาร ซึ่ง Port ที่ใช้ในการสื่อสารนั้นจะขึ้นอยู่กับสื่อที่ใช้เช่น สายสัญญาณต่างๆ เช่น Microwave, GPRS ดาวเทียม หรือวิทยุสื่อสาร
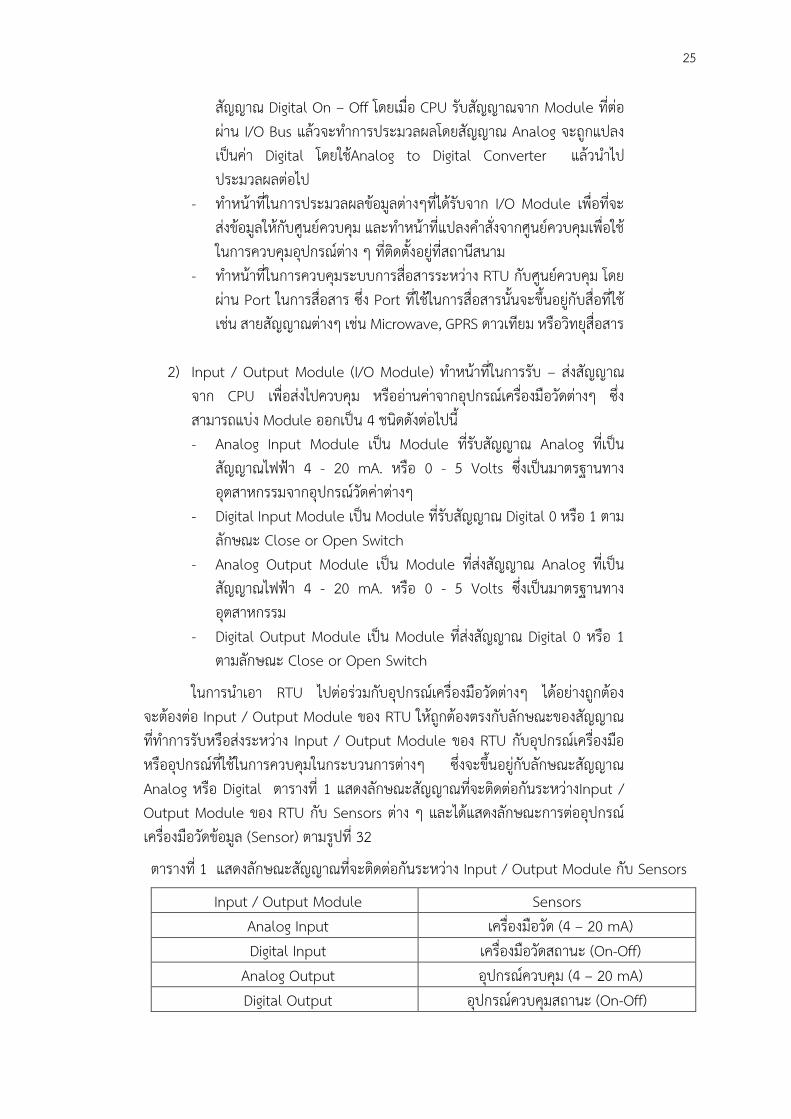
2) Input / Output Module (I/O Module) ท าหน้าที่ในการรับ – ส่งสัญญาณจาก CPU เพ่ือส่งไปควบคุม หรืออ่านค่าจากอุปกรณ์เครื่องมือวัดต่างๆ ซึ่งสามารถแบ่ง Module ออกเป็น 4 ชนิดดังต่อไปนี้ - Analog Input Module เป็น Module ที่รับสัญญาณ Analog ที่เป็น
สัญญาณไฟฟ้า 4 - 20 mA. หรือ 0 - 5 Volts ซึ่งเป็นมาตรฐานทางอุตสาหกรรมจากอุปกรณ์วัดค่าต่างๆ
- Digital Input Module เป็น Module ที่รับสัญญาณ Digital 0 หรือ 1 ตามลักษณะ Close or Open Switch
- Analog Output Module เป็น Module ที่ส่งสัญญาณ Analog ที่เป็นสัญญาณไฟฟ้า 4 - 20 mA. หรือ 0 - 5 Volts ซึ่งเป็นมาตรฐานทางอุตสาหกรรม
- Digital Output Module เป็น Module ที่ส่งสัญญาณ Digital 0 หรือ 1 ตามลักษณะ Close or Open Switch
ในการน าเอา RTU ไปต่อร่วมกับอุปกรณ์เครื่องมือวัดต่างๆ ได้อย่างถูกต้องจะต้องต่อ Input / Output Module ของ RTU ให้ถูกต้องตรงกับลักษณะของสัญญาณที่ท าการรับหรือส่งระหว่าง Input / Output Module ของ RTU กับอุปกรณ์เครื่องมือหรืออุปกรณ์ท่ีใช้ในการควบคุมในกระบวนการต่างๆ ซึ่งจะขึ้นอยู่กับลักษณะสัญญาณ Analog หรือ Digital ตารางที ่1 แสดงลักษณะสัญญาณที่จะติดต่อกันระหว่างInput / Output Module ของ RTU กับ Sensors ต่าง ๆ และได้แสดงลักษณะการต่ออุปกรณ์เครื่องมือวัดข้อมูล (Sensor) ตามรูปที่ 32
ตารางที ่1 แสดงลักษณะสัญญาณท่ีจะติดต่อกันระหว่าง Input / Output Module กับ Sensors
Input / Output Module Sensors Analog Input เครื่องมือวัด (4 – 20 mA) Digital Input เครื่องมือวัดสถานะ (On-Off)
Analog Output อุปกรณ์ควบคุม (4 – 20 mA) Digital Output อุปกรณ์ควบคุมสถานะ (On-Off)
26
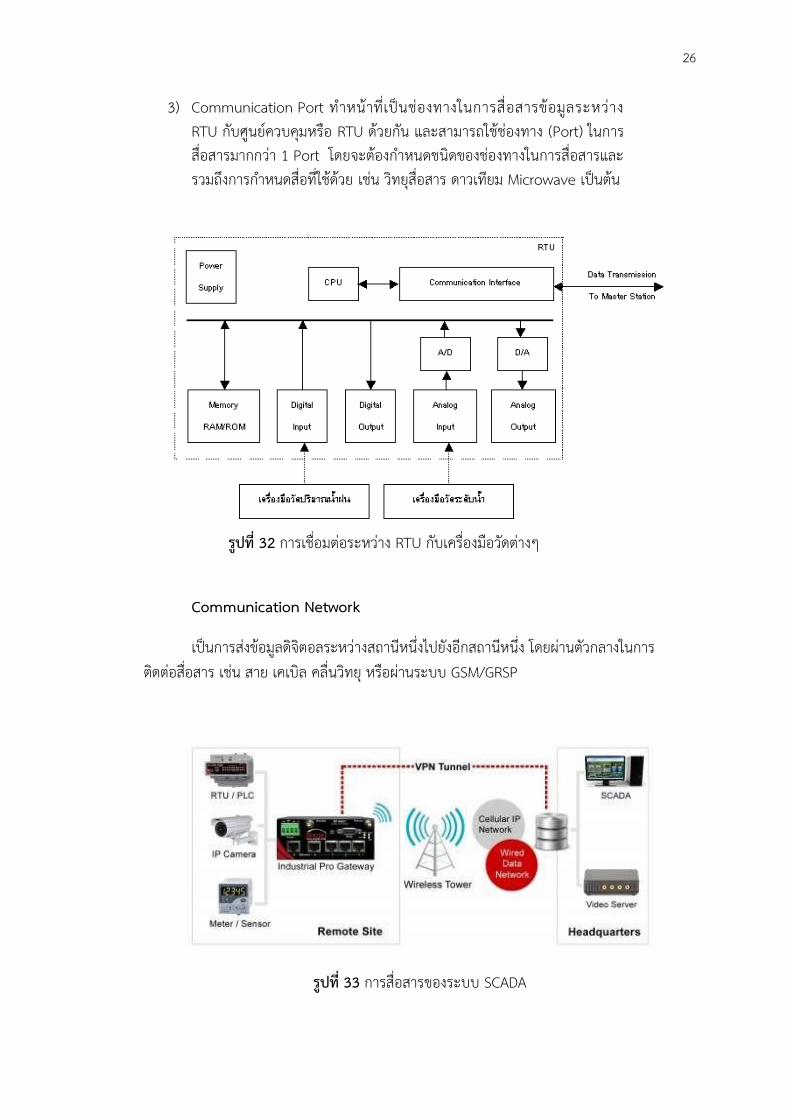
3) Communication Port ท าหน้าที่เป็นช่องทางในการสื่อสารข้อมูลระหว่าง RTU กับศูนย์ควบคุมหรือ RTU ด้วยกัน และสามารถใช้ช่องทาง (Port) ในการสื่อสารมากกว่า 1 Port โดยจะต้องก าหนดชนิดของช่องทางในการสื่อสารและรวมถึงการก าหนดสื่อที่ใช้ด้วย เช่น วิทยุสื่อสาร ดาวเทียม Microwave เป็นต้น
รูปที ่32 การเชื่อมต่อระหว่าง RTU กับเครื่องมือวัดต่างๆ
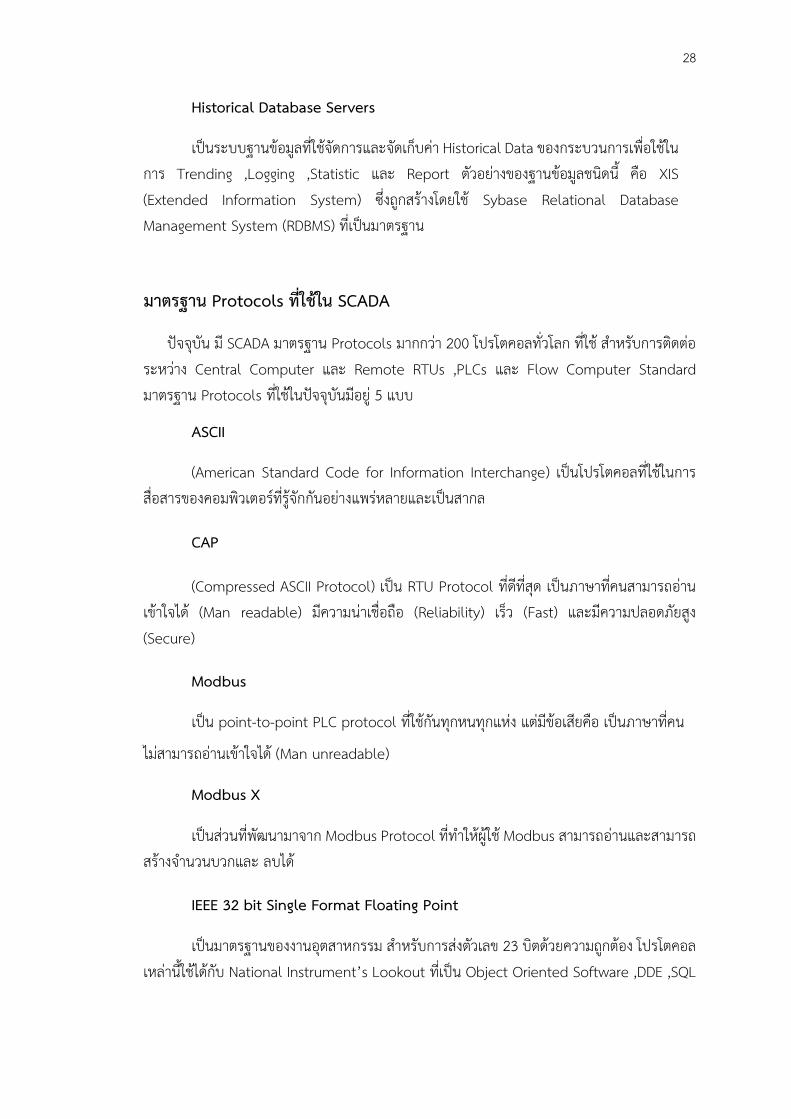
Communication Network
เป็นการส่งข้อมูลดิจิตอลระหว่างสถานีหนึ่งไปยังอีกสถานีหนึ่ง โดยผ่านตัวกลางในการติดต่อสื่อสาร เช่น สาย เคเบิล คลื่นวิทยุ หรือผ่านระบบ GSM/GRSP
รูปที ่33 การสื่อสารของระบบ SCADA
27
Central Monitoring Station (CMS)
เป็นศูนย์กลางของระบบ SCADA โดยรับข้อมูลมาประมวลผลและท าการแสดงกระบวนการบนหน้าจอคอมพิวเตอร์ ประกอบด้วย ซอฟต์แวร์ และ ฮาร์ดแวร์
ลักษณะของซอฟต์แวร์จะต้องท างานในแบบ Multitasking ได้ดังต่อไปนี้
- สื่อสารข้อมูลกับอุปกรณ์รับส่งสัญญาณ
- แสดงค่าท่ีอ่านได้บนจอภาพ
- เก็บบันทึกข้อมูลระยะยาวบนหน่วยความจ า
- ตรวจสอบสัญญาณเตือนและแสดงสัญญาณเตือน
- ค านวณค่า เก็บบันทึก และการควบคุม
- พิมพ์รายงานผลการปฏิบัติงานบนจอภาพ
- ตอบรับข้อมูลที่ป้อนผ่านแป้นพิมพ์
รูปที ่34 ศูนย์กลางของระบบ SCADA
ฐานของข้อมูล SCADA
Real-time Database Servers
เป็นระบบฐานข้อมูลที่ใช้จัดการและเก็บค่าของกระบวนการ ณ เวลาปัจจุบันในขณะใดๆ ค่า real time จะเปลี่ยนแปลงไปตามสภาพของกระบวนการที่เปลี่ยนแปลงไปตามเวลา ค่าของกระบวนการจะถูกตรวจจับ (monitor & scan) โดย RTU (Remote Termination Unit) จากนั้นข้อมูลค่า real-time จะถูกประมวลน ามาแสดงผลบน MMI (Man-Machine Interface) เพ่ือให้โอเปอเรเตอร์ รู้ถึงสภาพของกระบวนการ ณ ขณะนั้นๆ ค่า realtime ทุกๆ ค่าจะถูก update ได้ไม่เกินทุกๆ 2 วินาที
28
Historical Database Servers
เป็นระบบฐานข้อมูลที่ใช้จัดการและจัดเก็บค่า Historical Data ของกระบวนการเพ่ือใช้ในการ Trending ,Logging ,Statistic และ Report ตัวอย่างของฐานข้อมูลชนิดนี้ คือ XIS (Extended Information System) ซึ่งถูกสร้างโดยใช้ Sybase Relational Database Management System (RDBMS) ที่เป็นมาตรฐาน
มาตรฐาน Protocols ที่ใช้ใน SCADA
ปัจจุบัน มี SCADA มาตรฐาน Protocols มากกว่า 200 โปรโตคอลทั่วโลก ที่ใช้ ส าหรับการติดต่อระหว่าง Central Computer และ Remote RTUs ,PLCs และ Flow Computer Standard มาตรฐาน Protocols ที่ใช้ในปัจจุบันมีอยู่ 5 แบบ
ASCII
(American Standard Code for Information Interchange) เป็นโปรโตคอลที่ใช้ในการสื่อสารของคอมพิวเตอร์ที่รู้จักกันอย่างแพร่หลายและเป็นสากล
CAP
(Compressed ASCII Protocol) เป็น RTU Protocol ที่ดีที่สุด เป็นภาษาท่ีคนสามารถอ่านเข้าใจได้ (Man readable) มีความน่าเชื่อถือ (Reliability) เร็ว (Fast) และมีความปลอดภัยสูง (Secure)
Modbus
เป็น point-to-point PLC protocol ที่ใช้กันทุกหนทุกแห่ง แต่มีข้อเสียคือ เป็นภาษาท่ีคน
ไม่สามารถอ่านเข้าใจได้ (Man unreadable)
Modbus X
เป็นส่วนที่พัฒนามาจาก Modbus Protocol ที่ท าให้ผู้ใช้ Modbus สามารถอ่านและสามารถสร้างจ านวนบวกและ ลบได้
IEEE 32 bit Single Format Floating Point
เป็นมาตรฐานของงานอุตสาหกรรม ส าหรับการส่งตัวเลข 23 บิตด้วยความถูกต้อง โปรโตคอลเหล่านี้ใช้ได้กับ National Instrument’s Lookout ที่เป็น Object Oriented Software ,DDE ,SQL
29
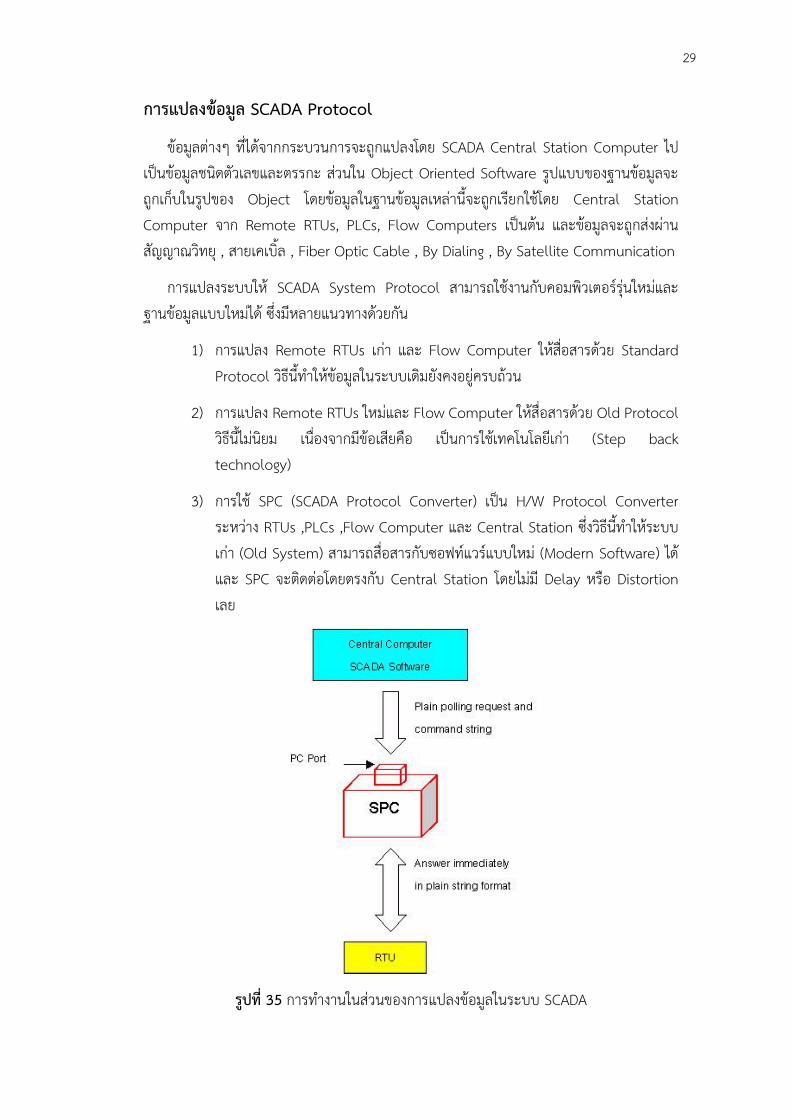
การแปลงข้อมูล SCADA Protocol
ข้อมูลต่างๆ ที่ได้จากกระบวนการจะถูกแปลงโดย SCADA Central Station Computer ไปเป็นข้อมูลชนิดตัวเลขและตรรกะ ส่วนใน Object Oriented Software รูปแบบของฐานข้อมูลจะถูกเก็บในรูปของ Object โดยข้อมูลในฐานข้อมูลเหล่านี้จะถูกเรียกใช้โดย Central Station Computer จาก Remote RTUs, PLCs, Flow Computers เป็นต้น และข้อมูลจะถูกส่งผ่านสัญญาณวิทยุ , สายเคเบิ้ล , Fiber Optic Cable , By Dialing , By Satellite Communication
การแปลงระบบให้ SCADA System Protocol สามารถใช้งานกับคอมพิวเตอร์รุ่นใหม่และฐานข้อมูลแบบใหม่ได้ ซึ่งมีหลายแนวทางด้วยกัน
1) การแปลง Remote RTUs เก่า และ Flow Computer ให้สื่อสารด้วย Standard Protocol วิธีนี้ท าให้ข้อมูลในระบบเดิมยังคงอยู่ครบถ้วน
2) การแปลง Remote RTUs ใหม่และ Flow Computer ให้สื่อสารด้วย Old Protocol วิธีนี้ไม่นิยม เนื่องจากมีข้อเสียคือ เป็นการใช้เทคโนโลยีเก่า (Step back technology)
3) การใช้ SPC (SCADA Protocol Converter) เป็น H/W Protocol Converter ระหว่าง RTUs ,PLCs ,Flow Computer และ Central Station ซึ่งวิธีนี้ท าให้ระบบเก่า (Old System) สามารถสื่อสารกับซอฟท์แวร์แบบใหม่ (Modern Software) ได้ และ SPC จะติดต่อโดยตรงกับ Central Station โดยไม่มี Delay หรือ Distortion เลย
รูปที่ 35 การท างานในส่วนของการแปลงข้อมูลในระบบ SCADA
30
สถาปัตยกรรม SCADA รุ่นแรก: "Monolithic"
ในรุ่นแรก การค านวณถูกกระท าโดยคอมพิวเตอร์เมนเฟรม เครือข่ายยังไม่เกิดในเวลาที่ระบบ SCADA ได้รับการพัฒนา ดังนั้นระบบ SCADA เป็นระบบอิสระไม่มีการเชื่อมต่อกับระบบอ่ืน ๆ เครือข่ายบริเวณกว้างได้รับการออกแบบมาโดยผู้ขาย RTU ในการสื่อสารกับ RTU. โพรโทคอลการสื่อสารที่มักจะถูกน ามาใช้เป็นกรรมสิทธิ์เฉพาะของผู้ขายในเวลานั้น รุ่นแรกของระบบ SCADA เป็นของซ้ าซ้อนเนื่องจากระบบ back-up ของเมนเฟรมมีการเชื่อมต่อในระดับบัสและถูกน ามาใช้ในกรณีที่เกิดความล้มเหลวของระบบเมนเฟรมหลัก บางระบบ SCADA รุ่นแรกที่ถูกพัฒนาขึ้นแบบ "turnkey" ที่วิ่งบน minicomputers เชน่ PDP-11 ของบริษทั Digital Equipment Corporation (DEC) ระบบเหล่านี้เป็นแบบ read only ในแง่ท่ีว่าพวกมันจะสามารถแสดงข้อมูลจากระบบการควบคุมแบบอนาล็อกท่ีมีอยู่ที่ใช้ในการด าเนินการแต่ละเวิร์กสเตชัน แต่พวกเขามักจะไม่ได้พยายามที่จะส่งสัญญาณไปยังสถานีควบคุมระยะไกลเนื่องจากปัญหา telemetry พ้ืนฐานที่เป็นอนาล็อกและผู้บริหารศูนย์การควบคุมมีความกังวลกับการยอมให้ท าการควบคุมโดยตรงจากเวิร์คสเตชันคอมพิวเตอร์ พวกมันยังท าหน้าที่แจ้งเตือนและบันทึกการเตือนและท าหน้าที่บัญชีค านวณสินค้าโภคภัณฑ์รายชั่วโมงและรายวัน
รุ่นที่สอง: "กระจาย"
การประมวลผลถูกกระจายไปหลายสถานีที่มีการเชื่อมต่อผ่านระบบ LAN และมีการใช้ข้อมูลร่วมกันในเวลาจริง แต่ละสถานีรับผิดชอบส าหรับงานเฉพาะจึงท าให้ขนาดและค่าใช้จ่ายของแต่ละสถานีน้อยกว่าสถานีในรุ่นแรก โพรโทคอลเครือข่ายที่ใช้ก็ยังคงเป็นกรรมสิทธิ์เฉพาะซึ่งน าไปสู่ปัญหาด้านความปลอดภัยของระบบ SCADA ที่ได้รับความสนใจจากแฮกเกอร์ เนื่องจากโพรโทคอลที่เป็นกรรมสิทธิ์เฉพาะจึงมีคนน้อยมากนอกจากนักพัฒนาและแฮกเกอร์ที่จะรู้มากพอที่จะก าหนดวิธีการรักษาความปลอดภัยของการติดตั้งระบบ SCADA เนื่องจากท้ังสองฝ่ายมีส่วนได้เสียจึงเก็บปัญหาด้านความปลอดภัยไว้เงียบๆ ความปลอดภัยของการติดตั้งระบบ SCADA มักจะถูกประเมินเกินกว่าความเป็นจริงอย่างมาก
รุ่นที่สาม: "เครือข่าย"
เนื่องจากการใช้งานของโพรโทคอล มาตรฐานและความจริงที่ว่าหลายระบบ SCADA ที่อยู่ในเครือข่ายจะสามารถเข้าถึงได้จากอินเทอร์เน็ต ระบบอาจมีความเสี่ยงจากการโจมตีระยะไกล ในทางตรงกันข้ามการใช้โพรโทคอล มาตรฐานและเทคนิคการรักษาความปลอดภัยมีความหมายว่าการปรับปรุงมาตรฐานความปลอดภัยสามารถใช้ได้กับระบบ SCADA โดยสมมติว่าพวกเขาได้รับการบ ารุงรักษาและการ update ทันเวลา
31
โครงสร้างของ SCADA (Architecture)
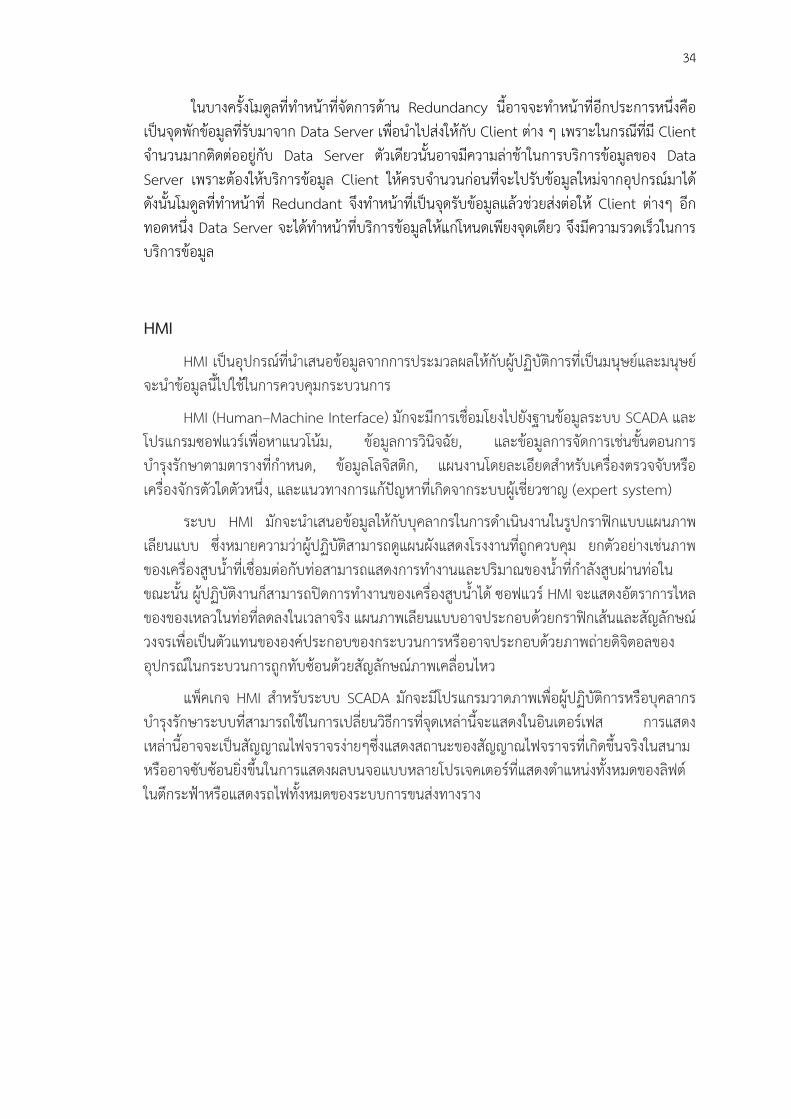
โครงสร้างด้านฮาร์ดแวร์ (Hardware Architecture)
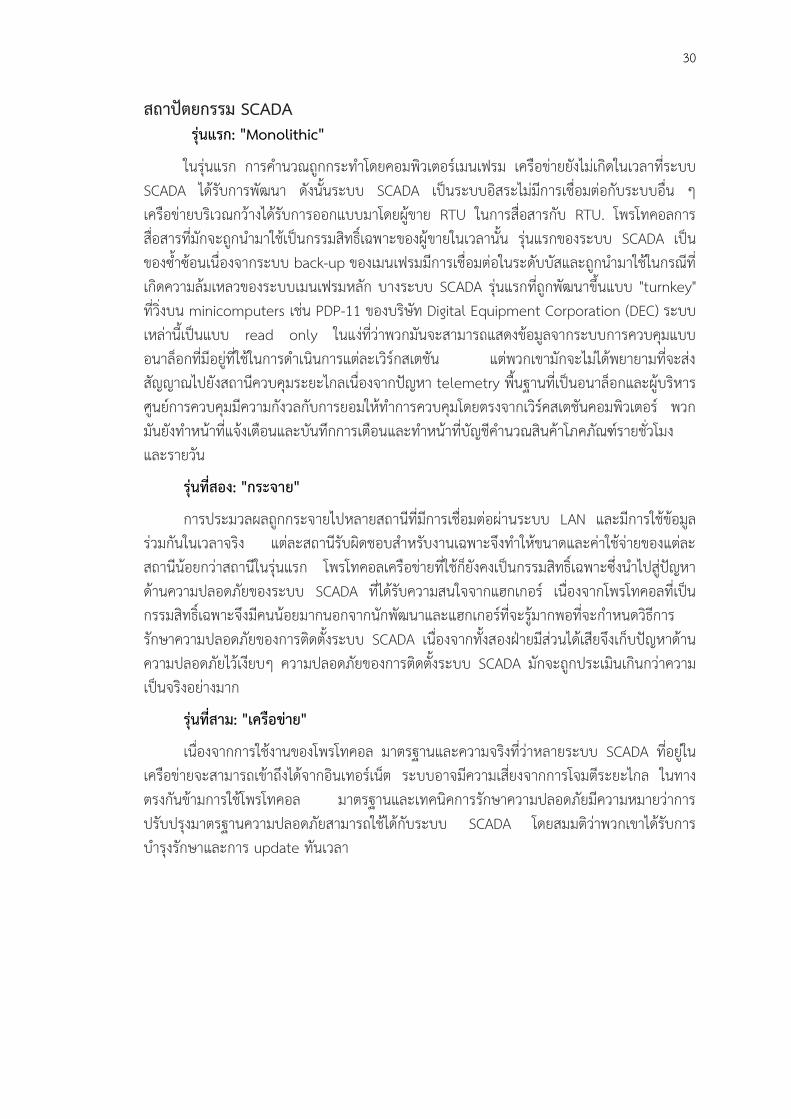
SCADA แบ่งตามโครงสร้างฮาร์ดแวร์ได้สองระดับคือ Client และ Data Server หรือเรียกสั้น ๆ ว่า Server โดยที่ Client คอืคอมพิวเตอร์ที่รับและส่งข้อมูลไปยัง Data Server โดยฝั่ง Client นี้จะแสดงผลการท างานของระบบควบคุมเช่น แสดงเป็นกราฟิก กราฟแบบต่อเนื่อง หรือระบบแจ้งเตือนเมื่อเกิดเหตุการณ์ฉุกเฉินหรือต้องการแจ้งเตือน เป็นต้น ฝั่ง Client สามารถสั่งงานควบคุมไปยัง Data Server เพ่ือส่งสัญญาณไปยัง PLC, DCS หรือ Controller อีกทอดหนึ่ง ส่วน Data Server จะท าหน้าที่ติดต่อกับ PLC, DCS, Controller หรือ RTU ต่าง ๆ เพ่ือรับสัญญาณและส่งสัญญาณไปยัง Client และรับการร้องขอจาก Client เพ่ือควบคุมอุปกรณ์ PLCและ Controller ต่าง ๆ Client และ Data Server ส่วนใหญ่ติดต่อกันผ่านระบบเครือข่าย Ethernet ดังรูปที่ 36
รูปที ่36 โครงสร้างแบบฮาร์ดแวร์ของระบบ SCADA
จากรูปที่ 36 นั้น Controller จะติดต่อกับอุปกรณ ์Field Instrument ต่าง ๆ เช่นเซ็นเซอร์ รีเลย์ เป็นต้นเพื่อน าสัญญาณมาให้กับ Data Server
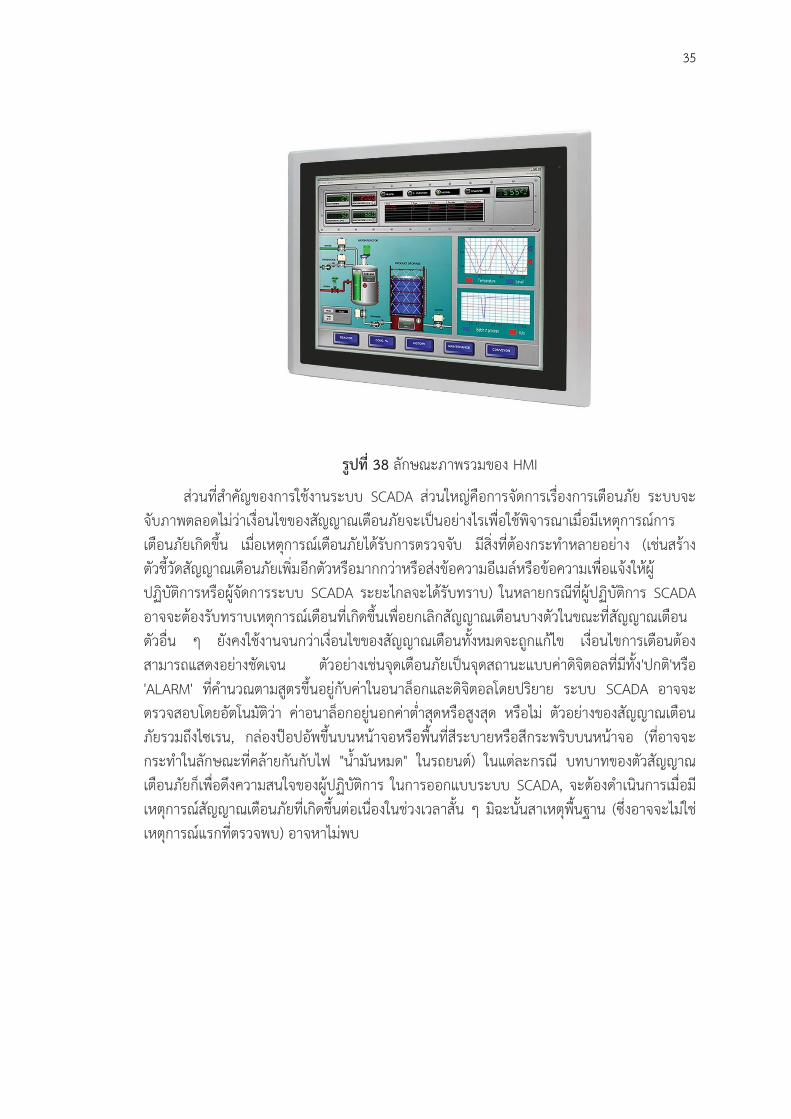
โครงสร้างด้านซอร์ฟแวร์ (Software Architecture)
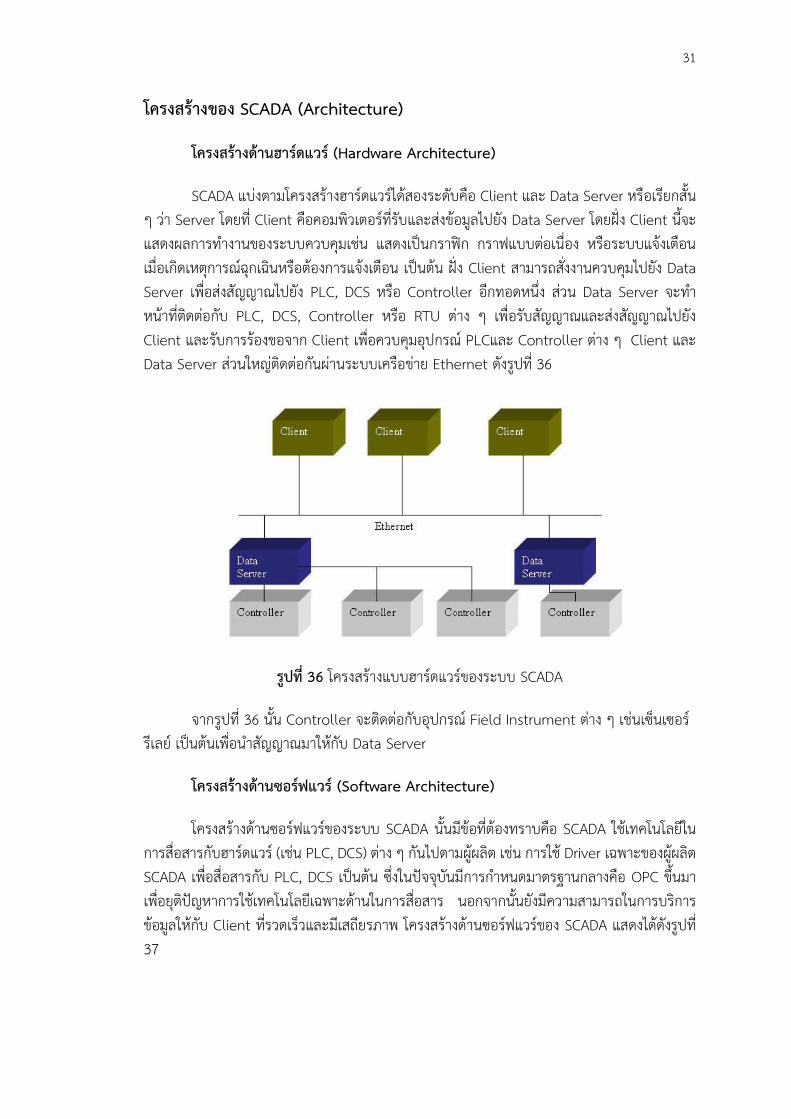
โครงสร้างด้านซอร์ฟแวร์ของระบบ SCADA นั้นมีข้อที่ต้องทราบคือ SCADA ใช้เทคโนโลยีในการสื่อสารกับฮาร์ดแวร์ (เช่น PLC, DCS) ต่าง ๆ กันไปตามผู้ผลิต เช่น การใช้ Driver เฉพาะของผู้ผลิต SCADA เพ่ือสื่อสารกับ PLC, DCS เป็นต้น ซึ่งในปัจจุบันมีการก าหนดมาตรฐานกลางคือ OPC ขึ้นมาเพ่ือยุติปัญหาการใช้เทคโนโลยีเฉพาะด้านในการสื่อสาร นอกจากนั้นยังมีความสามารถในการบริการข้อมูลให้กับ Client ที่รวดเร็วและมีเสถียรภาพ โครงสร้างด้านซอร์ฟแวร์ของ SCADA แสดงได้ดังรูปที่ 37
32
รูปที ่37 โครงสร้างแบบซอร์ฟแวร์ของระบบ SCADA
จากรูปที ่37 จะพบว่าในส่วนของ SCADA Server นั้นการติดต่อกับ PLC หรือ Controller นั้นท าได้ท้ังผ่าน Driver หรือ OPC โดยที่ OPC และ Driver สามารถรับค าสั่งแบบ Read / Write เพ่ืออ่านข้อมูลจาก PLC หรือ เขียนข้อมูลเพ่ือสั่งงานไปยัง PLC ได้
SCADA Server จะท าหน้าที่จัดการข้อมูล RTDB (Real Time Data Base) ที่ได้จาก PLC แล้วส่งให้กับ SCADA Client โดยที่ SCADA Server บางประเภทจะติดต่อกับ SCADA Client ผ่าน DDE Server ซึ่งท าให้สามารถน าเข้าข้อมูลจาก PLC เข้าสู่โปรแกรมเช่น MS Excel หรือ โปรแกรม Client อ่ืน ๆ ที่ติดต่อกับ DDE Server ได ้
SCADA บางตัวจะออกแบบให้ SCADA Server ท าหน้าที่ตรวจจับ Alarm และเก็บไว้ใน Alarm DB หรือเก็บข้อมูลที่เป็น Historian ไว้ใน Log DB เป็นต้นเพื่อส่งให้ Alarm Display และ Log Display ทางฝั่ง SCADA Client ต่อไป
ส าหรับส่วน Development Environment นั้นจะขึ้นอยู่กับการออกแบบของ SCADA ซอร์ฟแวร์นั้น ๆ ซึ่งโดยทั่วไปก็จะมีเครื่องมือในการสร้างและจัดการกราฟิก (Graphic Editor) เครื่องมือในการจัดการโปรเจคที่สร้างขึ้นมา (Project Editor) มีเครื่องมือในการน าเข้าและส่งออก Text file ที่เก็บค่าคอนฟิกูเรชั่นของการติดต่อกับ Driver หรือ OPC Server ไว้
โครงสร้างด้านการสื่อสาร (Communications)
การสื่อสารระหว่าง Client-Server จะสื่อสารผ่านโปรโตคอลโดยทั่วไปเช่น TCP/IP โดย Client จะติดต่อกับพารามิเตอร์หรือ Tag ภายใน Server ที่บริการข้อมูลด้วยรูปแบบที่แตกต่างกันไปตามผู้ผลิต เช่นมีการส่งค่าจาก Server เมื่อค่าของ I/O ของ PLC มีการเปลี่ยนแปลง เป็นต้น
การสื่อสารกับอุปกรณ์นั้น Server จะท าการตรวจสอบค่าจากอุปกรณ์ตามช่วงเวลาที่ผู้ใช้งานก าหนดไว้ (Defined polling rate) โดยอาจจะต่างกันไปตามพารามิเตอร์ประเภทต่าง ๆ โดยตัว
33
Controller จะส่งค่าพารามิเตอร์ตามที่ถูกร้องขอให้กับ Data Server พร้อมค่าเวลาขณะนั้น (Time Stamp) การสื่อสารกับอุปกรณ์ของ Data Server นั้นอาจเป็นการสื่อสารแบบ Modbus, Profibus, CAN bus เป็นต้น ขึ้นอยู่กับมาตรฐานการสื่อสารของอุปกรณ์นั้น ๆ ว่าเป็นแบบใด ในปัจจุบันมีการสร้าง OPC Server ที่สนับสนนุการติดต่อด้วยมาตรฐานต่างๆเพ่ิมขึ้นมากมายจนครอบคลุมอุปกรณ์ทุกประเภท และมีการพัฒนาให้ทั่วถึงไปยังอุปกรณ์ใหม่ ๆ อย่างต่อเนื่อง
โครงสร้างอินเทอร์เฟส (Interface)
การติดต่อระหว่าง Data Server กับอุปกรณ์หรือระหว่าง Data Server และ Data Server และกับ Client นั้น มีการผลิตเป็น Driver ออกมามากมายตามเทคนิคเฉพาะของแต่ละผู้ผลิต ต่อมาจึงมีการก าหนดมาตรฐานของอินเทอร์เฟสขึ้นมาเป็น OPC (OLE for Process Control) ซึ่งมีความรวดเร็วในการสื่อสารและบริการข้อมูลโดยมีการจัดตั้ง OPC Foundation ขึ้นเป็นองค์กรหลักในการก าหนดมาตรฐานและถ่ายทอดเทคโนโลยีให้แก่สมาชิก OPC จึงเป็นมาตรฐานกลางที่เปิดกว้างมากที่สุด
การติดต่อกับฐานข้อมูลภายนอกของ SCADA Software นั้น มีการสร้างให้สามารถติดต่อได้ผ่าน ODBC (Open Data Base Connectivity), OLEDB (Linking and Embedding Data Base), DDE (Dynamic Data Exchange) เป็นต้น เพ่ือให้สามารถแลกเปลี่ยนข้อมูลหรือท าการเก็บข้อมูลไว้ในฐานข้อมูลรูปแบบต่าง ๆ ในปัจจุบันมีการพัฒนาให้สามารถติดต่อกับโปรแกรม ERP ต่าง ๆ เช่น SAP เป็นต้นได้ด้วย
โครงสร้างความสามารถในการขยายระบบ (Scalability)
Scalability คือความสามารถในการรองรับและต่อขยายระบบ SCADA กับส่วนต่าง ๆ เช่น I/O ของอุปกรณ์ Controller และจ านวนเครื่อง SCADA Client ที่เพ่ิมขึ้น หรือการต่อพ่วงกับระบบ SCADA ของยี่ห้ออ่ืน ๆ เป็นต้น ถ้าหาก Data Server เป็นแบบ Driver ที่สร้างด้วยเทคโนโลยีเฉพาะในการติดต่อกับอุปกรณ์ ก็เป็นเรื่องล าบากในการต่อขยาย เพราะ Driver บางประเภทสามารถติดต่อได้เฉพาะ SCADA Software บางยี่ห้อเท่านั้น ปัญหานี้เป็นที่วิพากวิจารณ์กันอย่างกว้างขวาง ซึ่งปัจจุบันได้หันมาใช้มาตรฐานกลางคือ OPC เพ่ือแก้ไขปัญหานี้
โครงสร้างการส ารองระบบ (Redundancy)
SCADA Software ส่วนใหญ่มีความสามารถในการท างานส ารองระบบของ Data Server โดยที่เมื่อ Data Server เกดิความขัดข้องก็จะสั่งงานให้ Data Server อีกตัวหนึ่งท างานแทนที่ โดยจะมีการก าหนดคอนฟิกูเรชั่นไว้ที่ Client ว่าจะให้เลือกติดต่อกับ Data Server ตัวไหนเมื่อเกิดความขัดข้องเกิดขึ้น
34
ในบางครั้งโมดูลที่ท าหน้าที่จัดการด้าน Redundancy นี้อาจจะท าหน้าที่อีกประการหนึ่งคือเป็นจุดพักข้อมูลที่รับมาจาก Data Server เพ่ือน าไปส่งให้กับ Client ต่าง ๆ เพราะในกรณีที่มี Client จ านวนมากติดต่ออยู่กับ Data Server ตัวเดียวนั้นอาจมีความล่าช้าในการบริการข้อมูลของ Data Server เพราะต้องให้บริการข้อมูล Client ให้ครบจ านวนก่อนที่จะไปรับข้อมูลใหม่จากอุปกรณ์มาได้ ดังนั้นโมดูลที่ท าหน้าที่ Redundant จึงท าหน้าที่เป็นจุดรับข้อมูลแล้วช่วยส่งต่อให้ Client ต่างๆ อีกทอดหนึ่ง Data Server จะได้ท าหน้าที่บริการข้อมูลให้แก่โหนดเพียงจุดเดียว จึงมีความรวดเร็วในการบริการข้อมูล
HMI HMI เป็นอุปกรณ์ที่น าเสนอข้อมูลจากการประมวลผลให้กับผู้ปฏิบัติการที่เป็นมนุษย์และมนุษย์
จะน าข้อมูลนี้ไปใช้ในการควบคุมกระบวนการ
HMI (Human–Machine Interface) มักจะมีการเชื่อมโยงไปยังฐานข้อมูลระบบ SCADA และโปรแกรมซอฟแวร์เพ่ือหาแนวโน้ม, ข้อมูลการวินิจฉัย, และข้อมูลการจัดการเช่นขั้นตอนการบ ารุงรักษาตามตารางที่ก าหนด, ข้อมูลโลจิสติก, แผนงานโดยละเอียดส าหรับเครื่องตรวจจับหรือเครื่องจักรตัวใดตัวหนึ่ง, และแนวทางการแก้ปัญหาที่เกิดจากระบบผู้เชี่ยวชาญ (expert system)
ระบบ HMI มักจะน าเสนอข้อมูลให้กับบุคลากรในการด าเนินงานในรูปกราฟิกแบบแผนภาพเลียนแบบ ซึ่งหมายความว่าผู้ปฏิบัติสามารถดูแผนผังแสดงโรงงานที่ถูกควบคุม ยกตัวอย่างเช่นภาพของเครื่องสูบน้ าที่เชื่อมต่อกับท่อสามารถแสดงการท างานและปริมาณของน้ าที่ก าลังสูบผ่านท่อในขณะนั้น ผู้ปฏิบัติงานก็สามารถปิดการท างานของเครื่องสูบน้ าได้ ซอฟแวร์ HMI จะแสดงอัตราการไหลของของเหลวในท่อที่ลดลงในเวลาจริง แผนภาพเลียนแบบอาจประกอบด้วยกราฟิกเส้นและสัญลักษณ์วงจรเพื่อเป็นตัวแทนขององค์ประกอบของกระบวนการหรืออาจประกอบด้วยภาพถ่ายดิจิตอลของอุปกรณ์ในกระบวนการถูกทับซ้อนด้วยสัญลักษณ์ภาพเคลื่อนไหว
แพ็คเกจ HMI ส าหรับระบบ SCADA มักจะมีโปรแกรมวาดภาพเพ่ือผู้ปฏิบัติการหรือบุคลากรบ ารุงรักษาระบบที่สามารถใช้ในการเปลี่ยนวิธีการที่จุดเหล่านี้จะแสดงในอินเตอร์เฟส การแสดงเหล่านี้อาจจะเป็นสัญญาณไฟจราจรง่ายๆซึ่งแสดงสถานะของสัญญาณไฟจราจรที่เกิดขึ้นจริงในสนามหรืออาจซับซ้อนยิ่งขึ้นในการแสดงผลบนจอแบบหลายโปรเจคเตอร์ที่แสดงต าแหน่งทั้งหมดของลิฟต์ในตึกระฟ้าหรือแสดงรถไฟทั้งหมดของระบบการขนส่งทางราง
35
รูปที่ 38 ลักษณะภาพรวมของ HMI
ส่วนที่ส าคัญของการใช้งานระบบ SCADA ส่วนใหญ่คือการจัดการเรื่องการเตือนภัย ระบบจะจับภาพตลอดไม่ว่าเงื่อนไขของสัญญาณเตือนภัยจะเป็นอย่างไรเพื่อใช้พิจารณาเมื่อมีเหตุการณ์การเตือนภัยเกิดขึ้น เมื่อเหตุการณ์เตือนภัยได้รับการตรวจจับ มีสิ่งที่ต้องกระท าหลายอย่าง (เช่นสร้างตัวชี้วัดสัญญาณเตือนภัยเพิ่มอีกตัวหรือมากกว่าหรือส่งข้อความอีเมล์หรือข้อความเพ่ือแจ้งให้ผู้ปฏิบัติการหรือผู้จัดการระบบ SCADA ระยะไกลจะได้รับทราบ) ในหลายกรณีที่ผู้ปฏิบัติการ SCADA อาจจะต้องรับทราบเหตุการณ์เตือนที่เกิดขึ้นเพ่ือยกเลิกสัญญาณเตือนบางตัวในขณะที่สัญญาณเตือนตัวอ่ืน ๆ ยังคงใช้งานจนกว่าเงื่อนไขของสัญญาณเตือนทั้งหมดจะถูกแก้ไข เงื่อนไขการเตือนต้องสามารถแสดงอย่างชัดเจน ตัวอย่างเช่นจุดเตือนภัยเป็นจุดสถานะแบบค่าดิจิตอลที่มีท้ัง'ปกต'ิหรือ 'ALARM' ที่ค านวณตามสูตรขึ้นอยู่กับค่าในอนาล็อกและดิจิตอลโดยปริยาย ระบบ SCADA อาจจะตรวจสอบโดยอัตโนมัติว่า ค่าอนาล็อกอยู่นอกค่าต่ าสุดหรือสูงสุด หรือไม่ ตัวอย่างของสัญญาณเตือนภัยรวมถึงไซเรน, กล่องป๊อปอัพขึ้นบนหน้าจอหรือพ้ืนที่สีระบายหรือสีกระพริบบนหน้าจอ (ท่ีอาจจะกระท าในลักษณะที่คล้ายกันกับไฟ "น้ ามันหมด" ในรถยนต์) ในแต่ละกรณี บทบาทของตัวสัญญาณเตือนภัยก็เพ่ือดึงความสนใจของผู้ปฏิบัติการ ในการออกแบบระบบ SCADA, จะต้องด าเนินการเมื่อมีเหตุการณ์สัญญาณเตือนภัยที่เกิดข้ึนต่อเนื่องในช่วงเวลาสั้น ๆ มิฉะนั้นสาเหตุพื้นฐาน (ซึ่งอาจจะไม่ใช่เหตุการณ์แรกท่ีตรวจพบ) อาจหาไม่พบ

36
SCADA เหมาะสมกบังานประเภทใด 1) การตรวจสอบ
รูปที่ 39 ลักษณะการท างานในส่วนของการตรวจสอบ
2) การเก็บรวบรวมข้อมูลของกระบวนการผลิต
รูปที่ 40 ลักษณะการท างานในส่วนของการเก็บรวบรวมข้อมูล
3) การบริหารระบบควบคุม
รูปที่ 41 ลักษณะท างานในส่วนของการบริหารควบคุม
37
กลุ่มโรงงานอุตสาหกรรมขนาดใหญ่บริเวณกระบวนการผลิตครอบคลุมพ้ืนที่กว้างหรือ โรงงานอุตสาหกรรมมีกระบวนการผลิตอิสระติดตั้งกระจัดกระจายทั่วบริเวณพ้ืนที่การผลิต รวมถึงระบบสาธารณูปโภคต่าง
เปรียบเทียบ SCADA กบั DCS
1) เหมือนกับระบบ SCADA ตรงที่เป็นระบบควบคุมท่ีมีการควบคุมด้วยคอมพิวเตอร์ ผ่านระบบสื่อสารโดยทั่วไป ที่ต้องการความเร็วในการสื่อสารที่ค่อนข้างสูง
2) ต่างกับระบบ SCADA ตรงที่เป็นระบบที่มีการควบคุมซึ่งมีการเชื่อมต่อกันของอุปกรณ์ต่างๆภายในระบบในระยะใกล้ และมีส่วนควบคุมการท างานที่มากกว่า เป็นระบบที่ออกแบบมาส าหรับควบคุมการท างานในระดับล่าง (ต่างจาก SCADA ที่ออกแบบส าหรับงานระดับบน)
คุณสมบัติของระบบ SCADA
1) Object Oriented Graphics โปรแกรมนี้เป็นโปรแกรมท่ีท างานแบบ Object ทุก ๆ ออปเจ็ค หรือกลุ่มของออปเจ็ค สามารถเคลื่อนย้าย ปรับขนาดหมุน ตัด แปะได้ ท าให้ง่ายต่อการพัฒนา Standard User Interface ระบบติดต่อกับผู้ใช้เป็นลักษณะมาตรฐานของ Window ท าให้ผู้ใช้เรียนรู้ได้ง่าย
2) DDE Software สนับสนุน DDE Software ที่สนับสนุนการใช้งาน DDE ท าให้ซอฟแวร์ตัว อ่ืนในวินโดว์ที่สนับสนุน DDE เช่น Excel, Microsoft Word สามารถนา ข้อมูลจากซอฟแวร์ตัวนั้น ไป ใช้งานได้ Net DDE สนับสนุน
3) Net DDE ซึ่งเป็น DDE ส าหรับระบบเน็ตเวิร์กที่พัฒนาโดยบริษัท Wonder Ware ท าให้ คอมพิวเตอร์แต่ละจุดบนเน็ตเวิร์กสามารถแลกเปลี่ยนข้อมูลกันได้นอกจากนี้ควรจะสนับสนุนการ แลกเปลี่ยนข้อมูลกับระบบปฏิบัติการอ่ืน ๆ เช่น VMS และ UNIX ซอฟท์แวร์บางตัวอาจจะไม่สนับสนุน Net DDE เพราะ Net DDE พัฒนาโดยบริษัท Wonder Ware
4) Wizards เป็น Library ที่เก็บรูปภาพของหน้าปัด หรือรูปร่างของวัตถุที่ใช้อยู่บ่อยๆ
5) Real-Time Database สนบัสนุนข้อมูลทั้งแบบต่อเนื่องและแบบไม่ต่อเนื่องรวมทั้งข้อมูล จ านวนเต็มและตัวอักษร
38
6) Real-Time and Historical Trends สามารถดูการเปลี่ยนแปลงของค่าต่าง ๆ เทียบกับเวลาได้ และสามารถใช้ Cursorอ่านค่า ณ จุดที่ต้องการ หรือ ท าการขยายภาพ ณ บริเวณท่ีต้องการได้
7) Alarm Capabilities สนับสนุนสัญญาณเตือนอย่างน้อย 10 ระดับ สัญญาณเตือนที่เกิดขึ้น สามารถแสดงบนหน้าจอในลักษณะการเปลี่ยนแปลงของสีไ และเก็บข้อมูลลง Disk หรือส่งออกทาง เครื่องพิมพ์ได้
8) Security ระบบรักษาความปลอดภัยควรจะก าหนดระดับของผู้ใช้ได้ไม่ต่ า กว่า 10 ขั้น พร้อมกับบันทึกการใช้งานของผู้ใช้แต่ละคนว่ามีการใช้งาน เข้าออกจากระบบเมื่อไร
9) Client-server ในระบบขนาดใหญ่ที่ซับซ้อนนั้น ระบบควบคุมแบบอัตโนมัติจะต้องเป็น ระบบเน็ตเวิร์ก การสนับสนุนระบบ Client-server ท าให้สามารถกระจายงานต่าง ๆ ไปยังคอมพิวเตอร์ แต่ละตัวในเน็ตเวิร์กโดยอาศัยข้อมูลกลางร่วมกันได้
10) Reporting สนับสนุนการท ารายงานต่าง ๆ เช่น รายงานประจ าวันเกี่ยวกับข้อมูลต่าง ๆ เพ่ือเป็นข้อมูลส าหรับผู้บริหารในการตัดสินใจอีกต่อไป
11) Network สนับสนุนการท างานบนเน็ตเวิร์กได้หลายชนิดเช่น Ethernet, Token Ring, Arenet, DEC Net เป็นต้น และสลับโปรโตคอลหลายชนิดเช่น TPX, TCP/IPเป็นต้น
12) SPC (Statistic Process Control) ความสามารถส่วนนี้จะเป็นการน าข้อมูลที่บันทึกได้มาวิเคราะห์และส่งผลลัพธ์ในรูปแบบต่าง ๆ เช่น ฮิสโตแกรม ตาราง กราฟเส้น เป็นต้น ท าให้ผู้ดูแลระบบ สามารถติดตามและวิเคราะห์ระบบโดยรวมได้
13) Redundant Server เนื่องจากมีความเป็นไปได้ที่คอมพิวเตอร์ที่ต่อกับ PLC หรือ MPU (Master Control Unit) อาจเกิดปัญหาได้ ดังนั้นซอฟท์แวร์ทางด้าน SCADA ที่ดีควรจะยอมให้คอมพิวเตอร์ 2 ตัว ตอ่กับ MCU เพียงตัวเดียวได้โดยคอมพิวเตอร์อีกตัวหนึ่งจะเป็นระบบส ารอง เมื่อคอมพิวเตอร์หลักเกิดขัดข้อง คอมพิวเตอร์ส ารองจะเข้าท างานแทนที่ทันที เพ่ือป้องกันมิให้ระบบโดยรวมเสียหาย
สิ่งที่ควรพิจารณาในการใช้งานระบบ SCADA
1) ขนาดและความซับซ้อนของระบบที่ต้องการควบคุม
2) ความเร็วในการสื่อสารข้อมูลระหว่างส่วนบุคคลทั้งสอง
39
3) ระดับความส าคัญของการควบคุม
4) ระบบสื่อสารที่มีให้ใช้ระหว่างส่วนควบคุมทั้งสอง
5) ระดับความส าคัญของข้อมูลที่ใช้ในการควบคุม
6) ความจ าเป็นของข้อมูลที่ต้องการติตต่อระหว่างกัน
ประโยชน์ของการใช้งานระบบ SCADA
1) เพ่ิมขนาดและความซับซ้อนของระบบที่ต้องการควบคุม
2) ง่ายต่อการดูแลและตรวจตราระบบ
3) สามารถน าข้อมูลที่เก็บไว้ไปใช้ประโยชน์ได้
4) เพ่ิมความปลอดภัยให้กับผู้ดูแลระบบ
5) เหมาะสมส าหรับงานที่ต้องการการตัดสินใจจากผู้ควบคุมระบบ (ไม่สามารถตัดสินใจไดด้้วยเครื่องจักร)
6) ลดจ านวนคนงานที่ต้องใช้งานในการปฏิบัติ
สรุปลักษณะการท างานของระบบ SCADA 1) เป็นระบบที่ใช้ตรวจวัดข้อมูลและใช้ควบคุมการท างานของอุปกรณ์ พร้อมทั้งรายงานข้อมูล
ทางไกลแบบอัตโนมัติ 2) การตรวจวัดข้อมูลแบบ Analog และแบบ Digital 3) ระบบควบคุมการส่งข้อมูลแบบ Self-Reporting Mode และ Interrogation Mode 4) ระบบการส่งข้อมูลเป็นแบบ Event หรือ Time Mode 5) ระบบสามารถตรวจสอบการท างานด้วยตนเอง (Self-Diagnosis) 6) การท างานเป็นแบบ Automatic Real Time System 7) สามารถขยายการตรวจวัดข้อมูล (Sensor) ที่สถานีสนามและโครงข่ายสถานีตรวจวัด
(Station Network) ได้โดยไม่มีผลกระทบต่อการท างานประจ า (Routine Performance)
40
ตัวอย่างการใช้งาน SCADA ในส่วนนี้จะเป็นการน าระบบ SCADA มาควบคุมการส่งจ่ายกระแสไฟฟ้า ส าหรับในระบบส่งจ่าย
กระแสไฟฟ้าได้มีการก าหนดฟังก์ชั่น มาตรฐานระบบ SCADA ไว้ดังนี้ 1) Data Acquisition : ต้องมีการอ่านและเก็บรวบรวมค่าที่อ่านได้จากเครื่องมือวัด เช่น ค่า
แรงดันไฟฟ้า กระแสไฟฟ้า และ สถานะปิดเปิดวงจรของอุปกรณ์ไฟฟ้าที่ติดตั้งกระจัดกระจายอยู่ในระบบไฟฟ้าอย่างต่อเนื่องตลอดเวลา
2) Data Processing and Monitoring : ต้องมีการตรวจสอบข้อมูลที่อ่าน และเก็บรวบรวมมาอยู่ตลอดเวลาว่ามีข้อมูลใดที่ผิดปกติไปจากท่ีควรจะเป็นหรือไม่ ถ้ามีจะต้องมีการส่งสัญญาณเตือน (alarm) ให้ทราบโดยทันที
3) Supervisory Control : ต้องสามารถควบคุมอุปกรณ์ไฟฟ้าที่ติดตั้งกระจัดกระจายอยู่ในระบบไฟฟ้า เช่น การปิด-เปิดวงจร การเพ่ิม-ลดแท๊ปหม้อแปลง เป็นต้น จากศูนย์ควบคุมสั่งจ่ายไฟได้ทันทีตลอดเวลา
4) Alarm and Event Processing : ต้องมีการบันทึกเหตุการณ์ใดๆ ก็ตามทีเ่กิดขึ้นทั้งระบบการส่งจ่ายกระแสไฟฟ้า และระบบควบคุม โดยจะต้องบันทึกด้วยความละเอียดสูง 1 ถึง 10 ใน 1000 ส่วนของวินาที เพื่อน ามาใช้ในการวิเคราะห์แก้ไขปัญหา
บรรณานุกรม
[1] http://archive.wunjun.com/bigdaddy/3/103.html [Online] [2] ทวิช ชูเมือง, การออกแบบระบบควบคุมและเครื่องมือวัดทางอุตสาหกรรมเล่ม 1 [3] https://th.wikipedia.org/wiki/%E0%B8%A3%E0%B8%B0%E0%B8%9A%E0%B8% 9A%E0 %B8% AA%E0%B8%81%E0%B8%B2%E0%B8%94%E0%B8%B2
[4] http://www.binaryadvance.com/SCADA.html





























