Embed Size (px)
Citation preview
Aktuator ElektrikMekatronika
Program Studi Teknik Mesin
STT Mandala Bandung
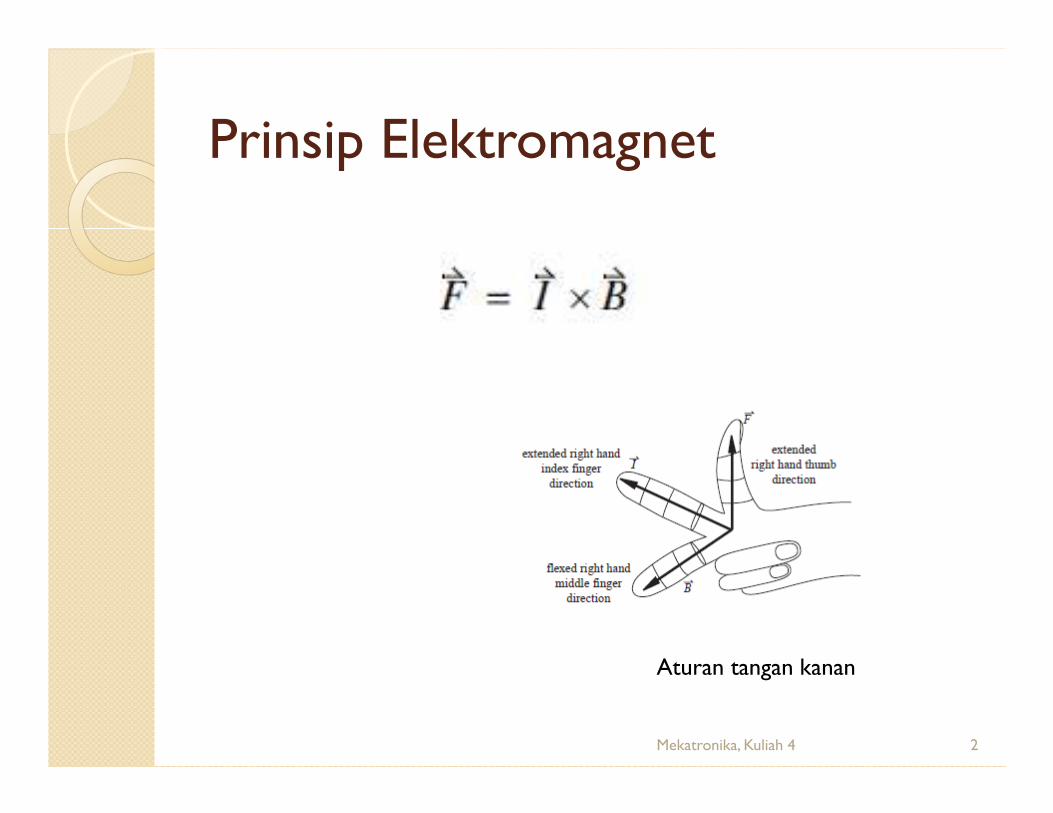
Prinsip Elektromagnet
Mekatronika, Kuliah 4 2
Aturan tangan kanan
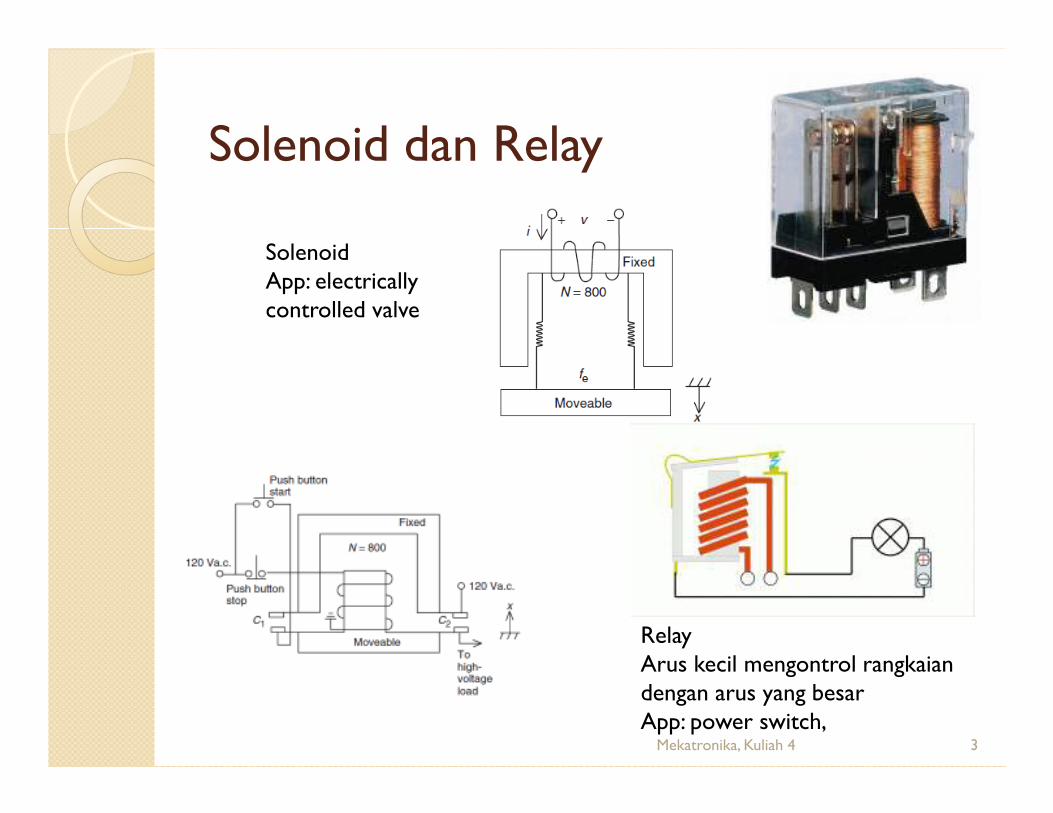
Solenoid dan Relay
Mekatronika, Kuliah 4 3
SolenoidApp: electricallycontrolled valve
RelayArus kecil mengontrol rangkaiandengan arus yang besarApp: power switch,
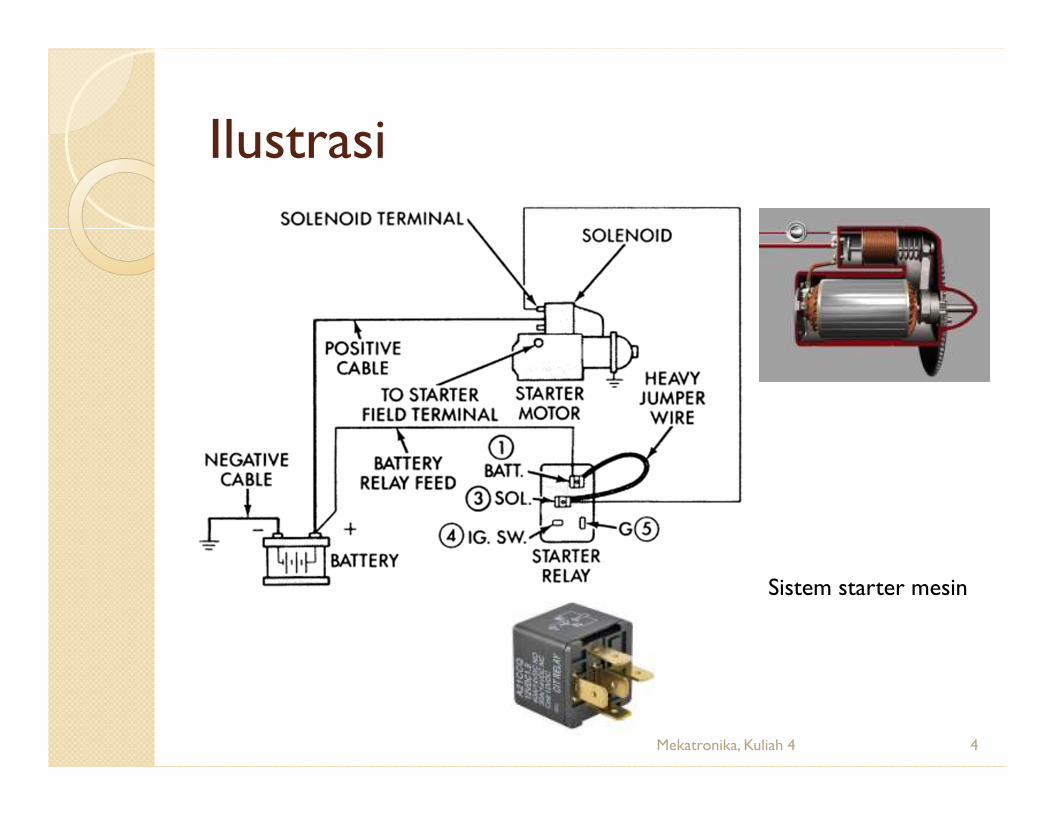
Ilustrasi
Mekatronika, Kuliah 4 4
Sistem starter mesin
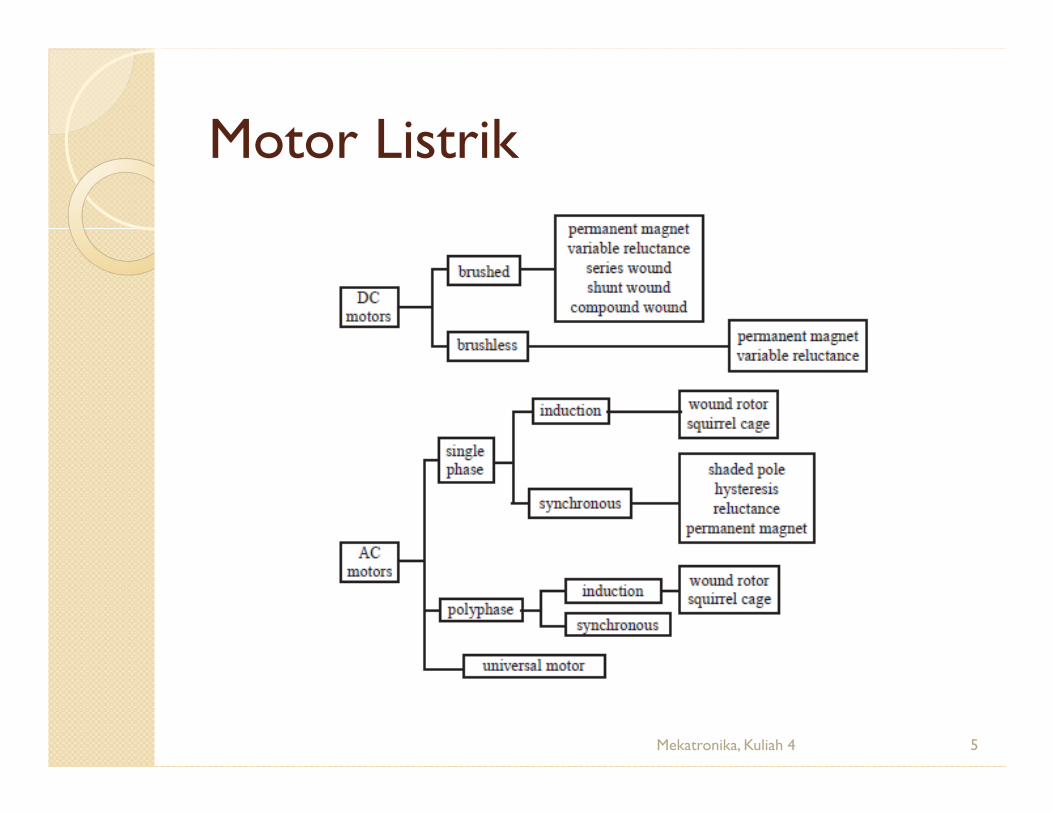
Motor Listrik
Mekatronika, Kuliah 4 5
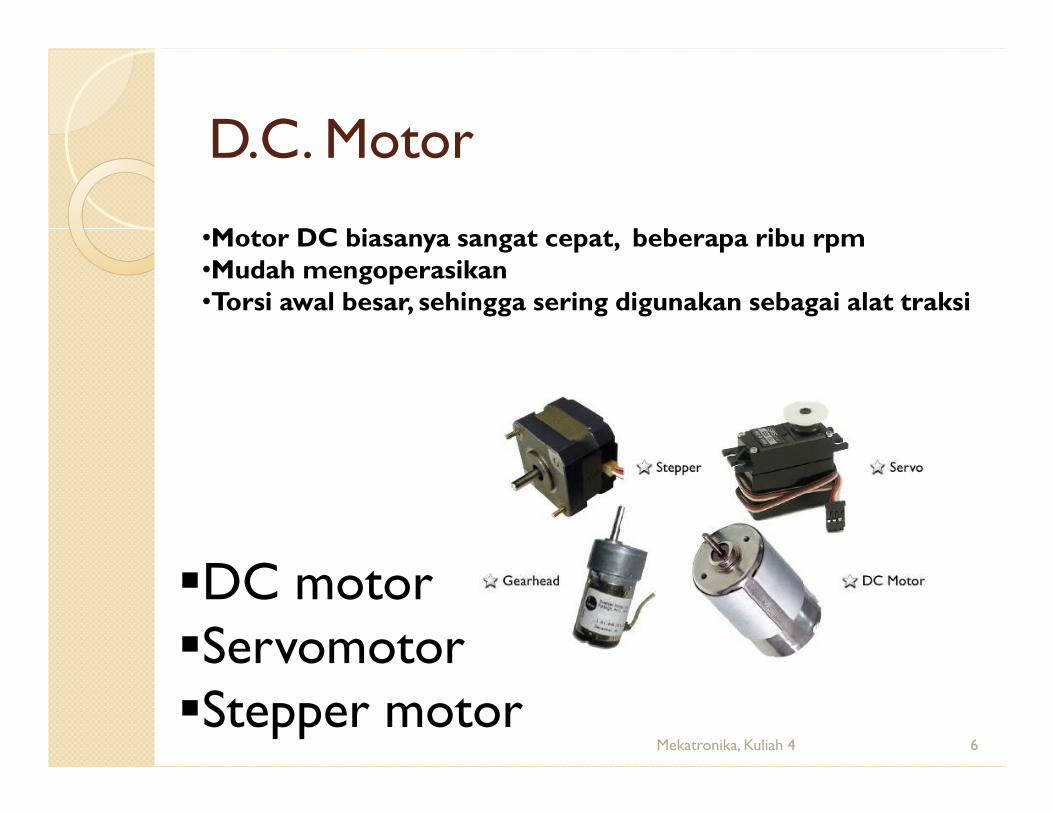
D.C. Motor
Mekatronika, Kuliah 4 6
•Motor DC biasanya sangat cepat, beberapa ribu rpm•Mudah mengoperasikan•Torsi awal besar, sehingga sering digunakan sebagai alat traksi
�DC motor�Servomotor�Stepper motor
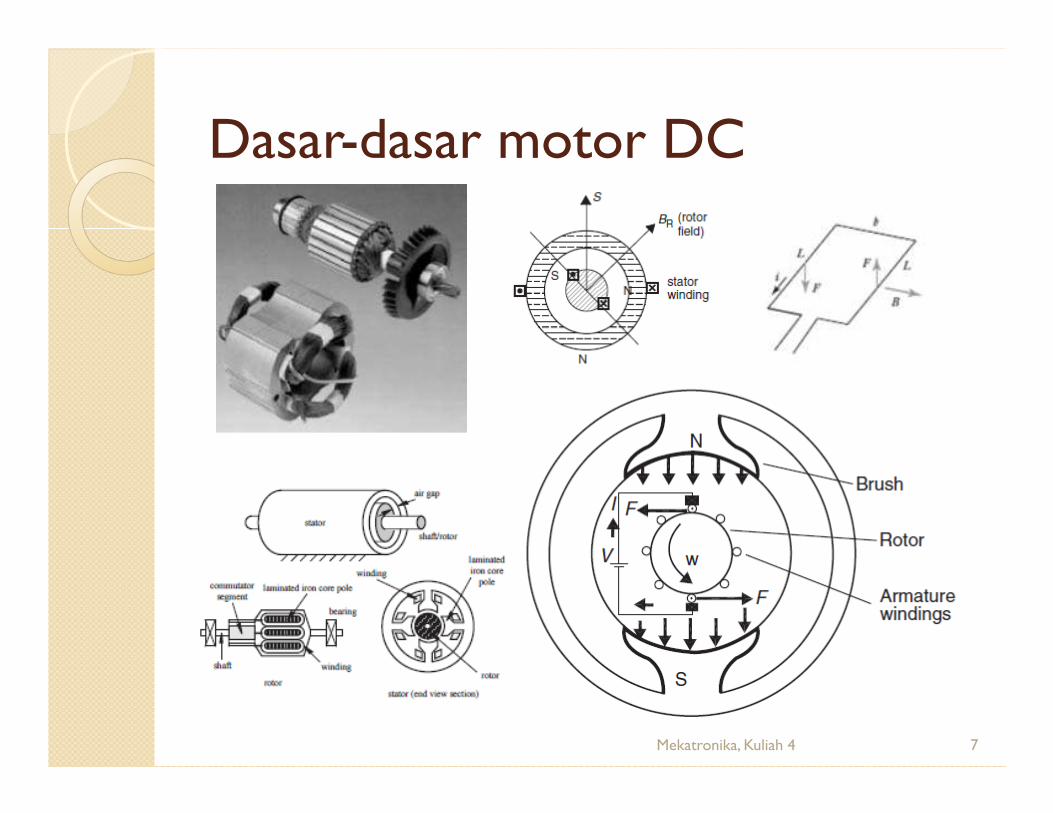
Dasar-dasar motor DC
Mekatronika, Kuliah 4 7
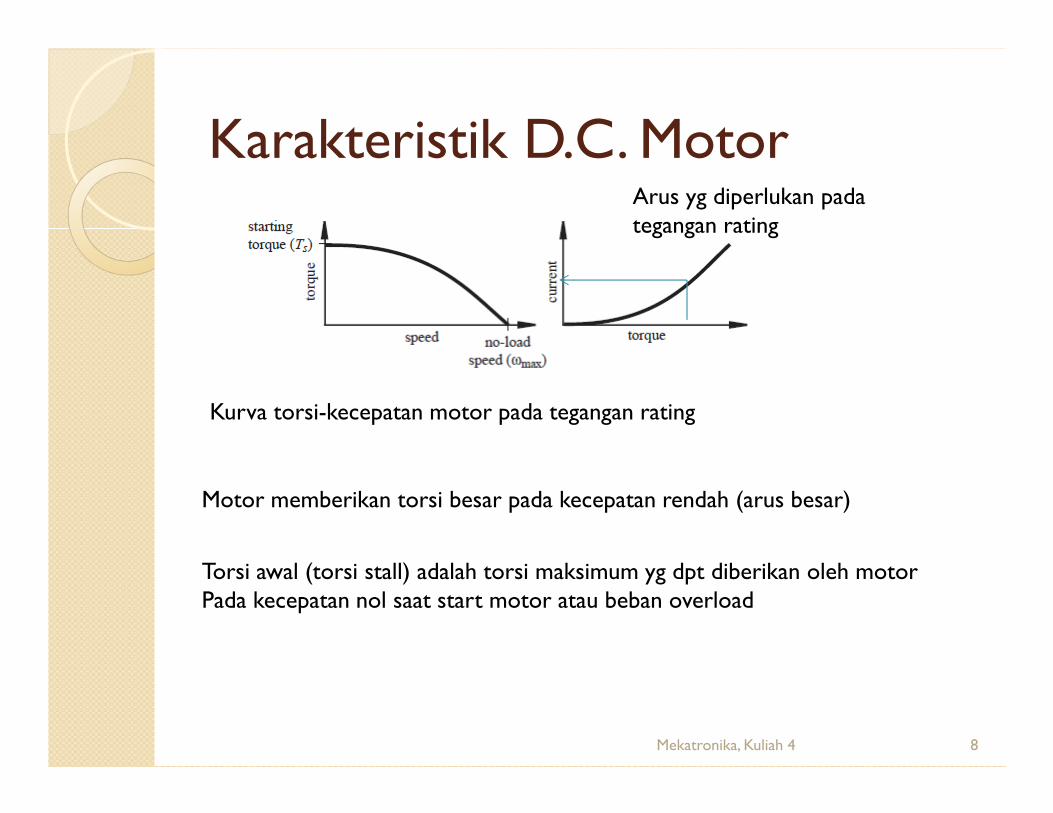
Karakteristik D.C. Motor
Mekatronika, Kuliah 4 8
Kurva torsi-kecepatan motor pada tegangan rating
Arus yg diperlukan padategangan rating
Motor memberikan torsi besar pada kecepatan rendah (arus besar)
Torsi awal (torsi stall) adalah torsi maksimum yg dpt diberikan oleh motorPada kecepatan nol saat start motor atau beban overload
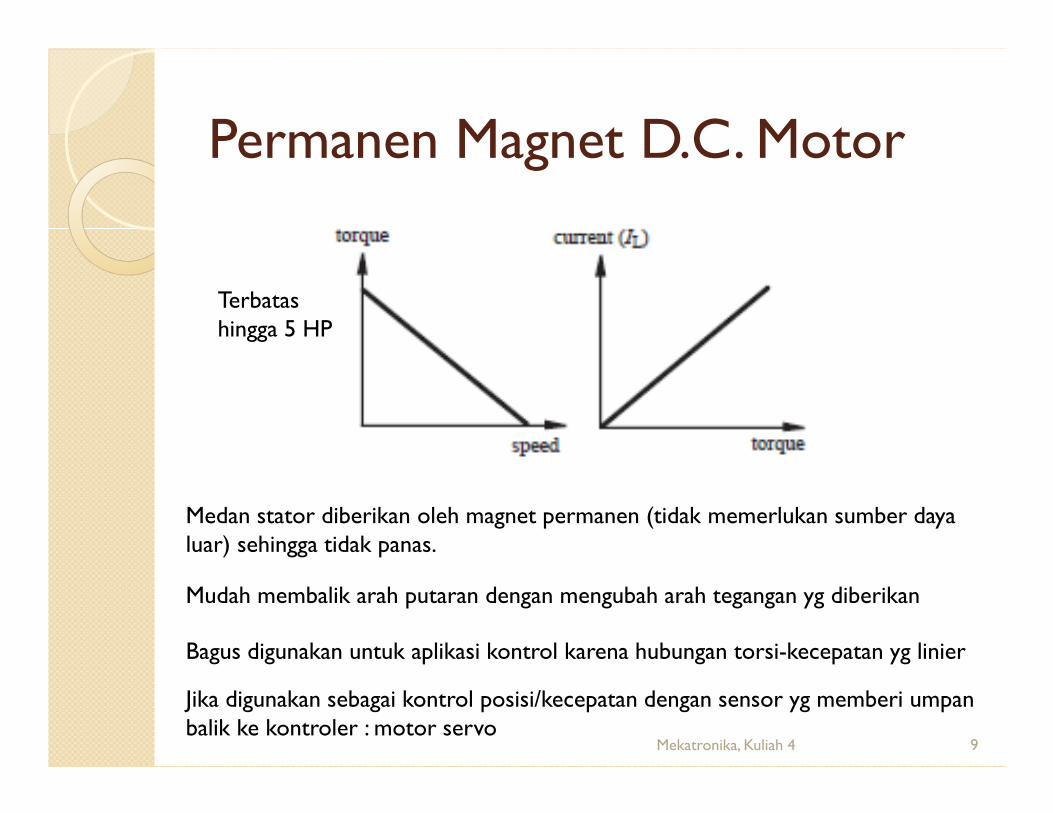
Permanen Magnet D.C. Motor
Mekatronika, Kuliah 4 9
Mudah membalik arah putaran dengan mengubah arah tegangan yg diberikan
Bagus digunakan untuk aplikasi kontrol karena hubungan torsi-kecepatan yg linier
Medan stator diberikan oleh magnet permanen (tidak memerlukan sumber dayaluar) sehingga tidak panas.
Jika digunakan sebagai kontrol posisi/kecepatan dengan sensor yg memberi umpanbalik ke kontroler : motor servo
Terbatashingga 5 HP
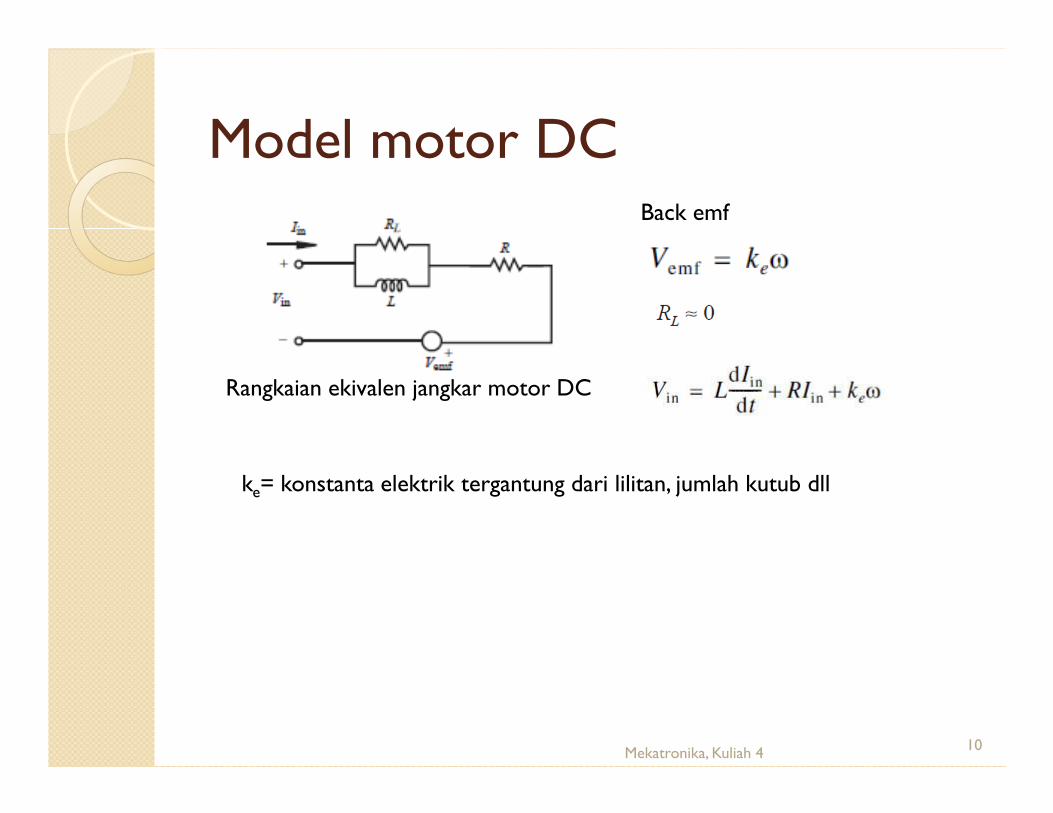
Model motor DC
Mekatronika, Kuliah 410
Rangkaian ekivalen jangkar motor DC
ke= konstanta elektrik tergantung dari lilitan, jumlah kutub dll
Back emf
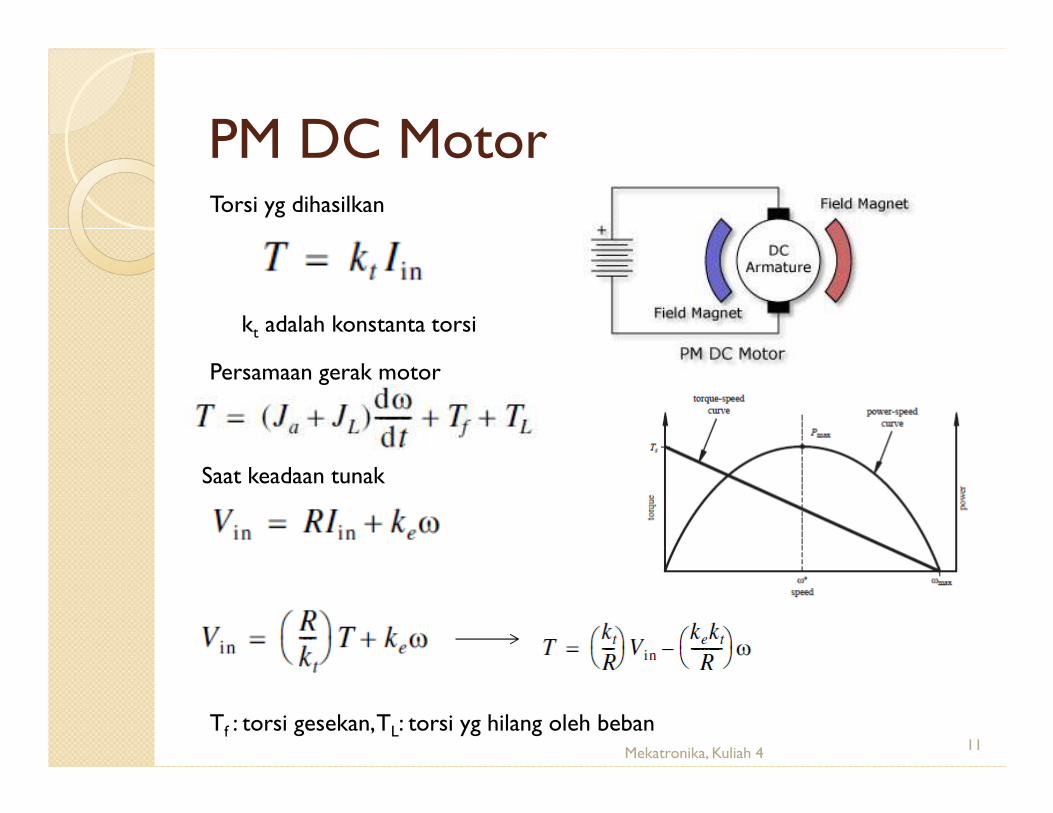
PM DC Motor
Mekatronika, Kuliah 411
Torsi yg dihasilkan
kt adalah konstanta torsi
Persamaan gerak motor
Saat keadaan tunak
Tf : torsi gesekan, TL: torsi yg hilang oleh beban
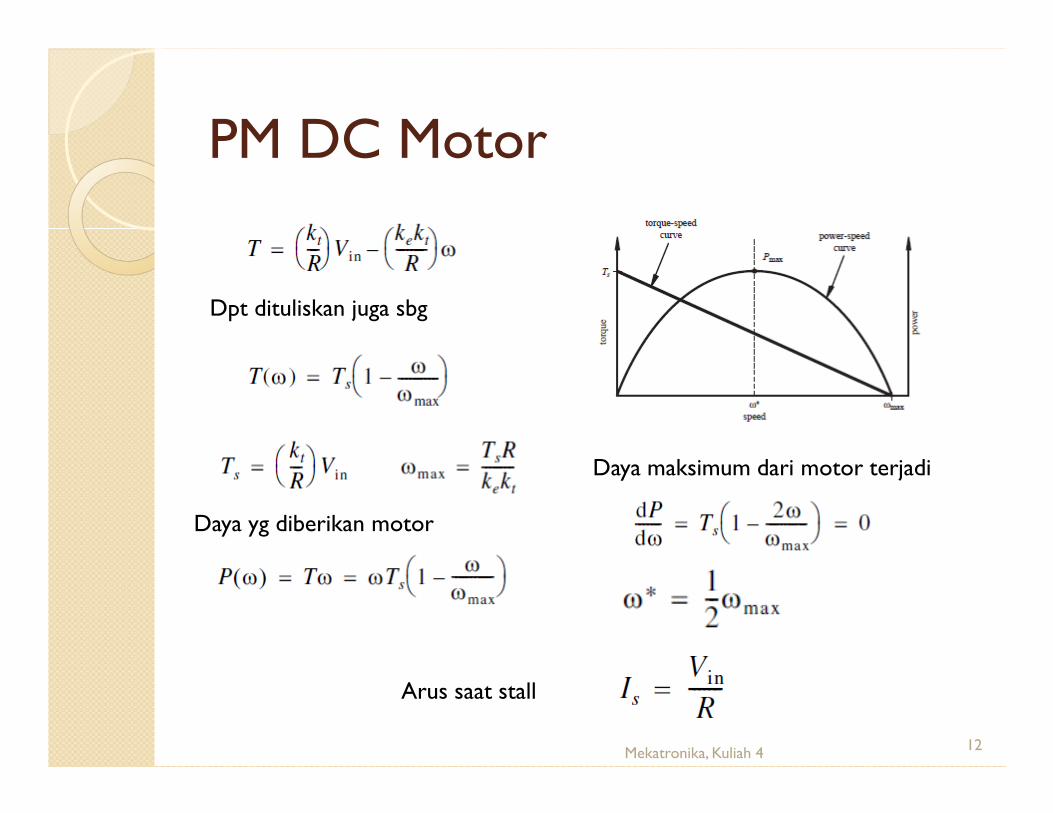
PM DC Motor
Mekatronika, Kuliah 412
Dpt dituliskan juga sbg
Daya yg diberikan motor
Daya maksimum dari motor terjadi
Arus saat stall
Motor shunt
Mekatronika, Kuliah 4 13
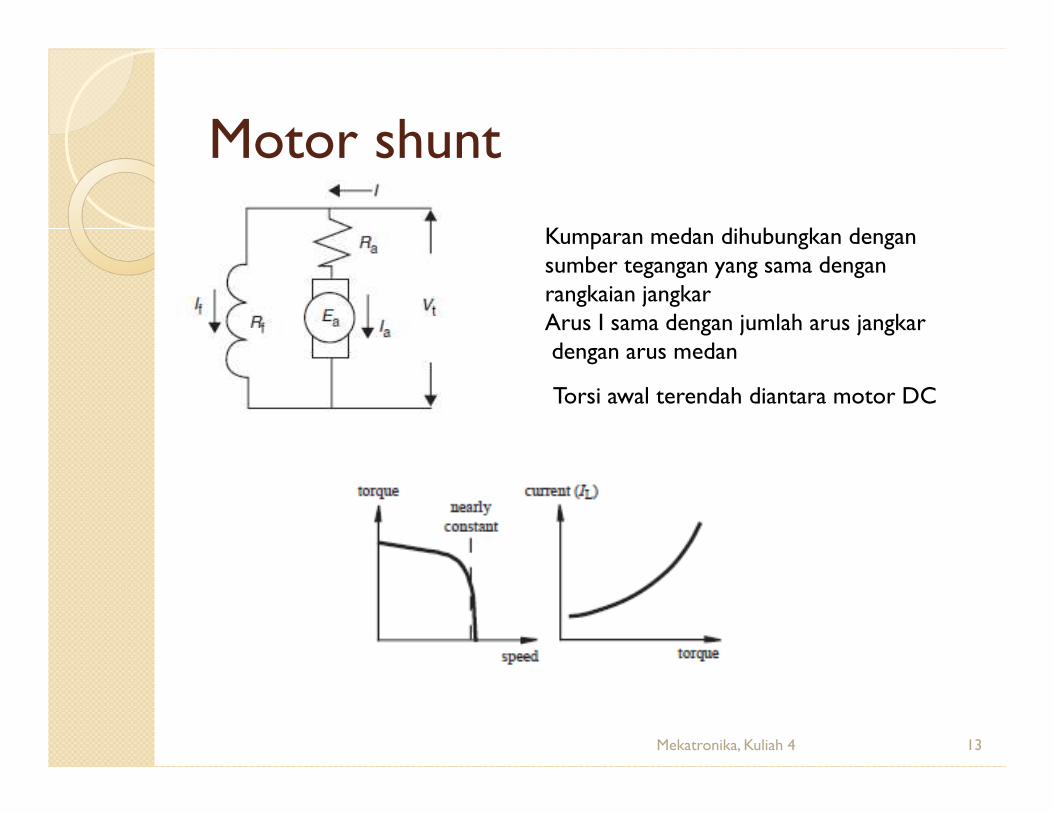
Kumparan medan dihubungkan dengansumber tegangan yang sama denganrangkaian jangkarArus I sama dengan jumlah arus jangkardengan arus medan
Torsi awal terendah diantara motor DC
Motor seri
Mekatronika, Kuliah 4 14
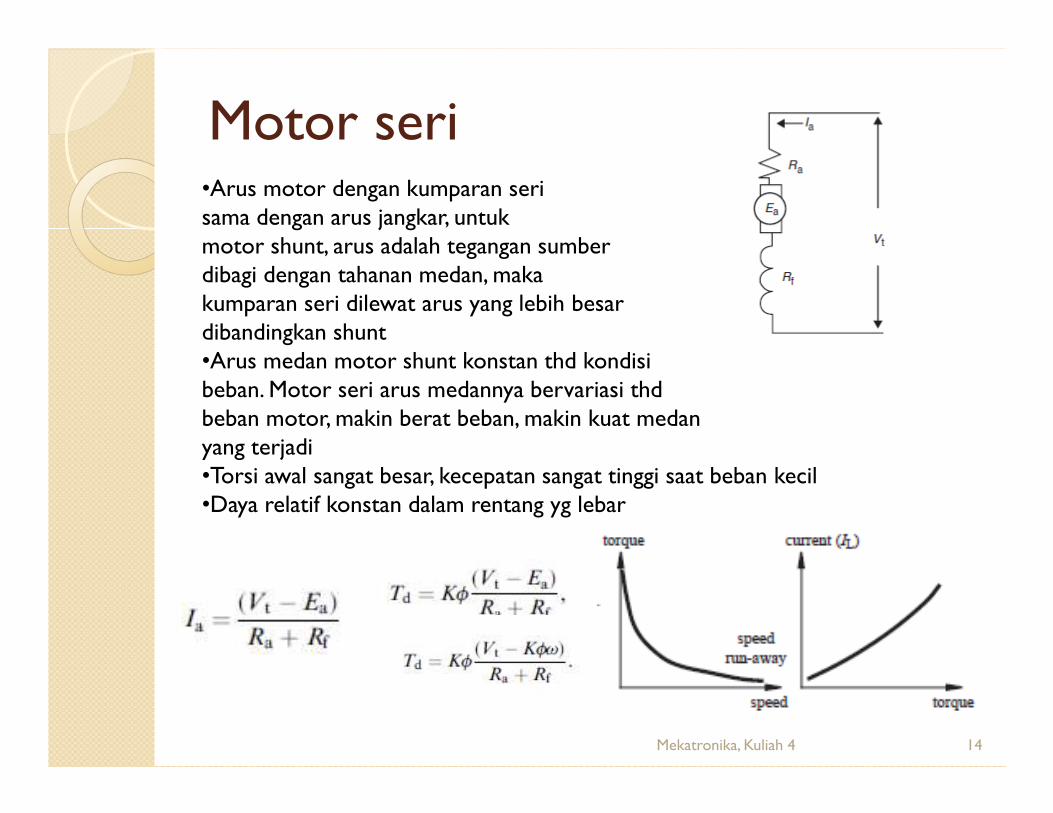
•Arus motor dengan kumparan serisama dengan arus jangkar, untukmotor shunt, arus adalah tegangan sumberdibagi dengan tahanan medan, makakumparan seri dilewat arus yang lebih besardibandingkan shunt•Arus medan motor shunt konstan thd kondisibeban. Motor seri arus medannya bervariasi thdbeban motor, makin berat beban, makin kuat medanyang terjadi•Torsi awal sangat besar, kecepatan sangat tinggi saat beban kecil•Daya relatif konstan dalam rentang yg lebar
Motor servo
Mekatronika, Kuliah 4 15
•Motor servo adalah motor dengan gigi pada rotornya dikopel denganpotentiometer untuk memberikan feedback posisi motor•Roda gigi dalam gearbox servo dihubungkan dengan potensiometer•Potensiometer dihubungkan dengan kapasitor dalam rangkaian RCdengan memberikan tegangan pulsa ke rangkaian RC, motor akanbergerak. •Ketika motor berputar, tahanan pada rangkaian RC berubah yang akanmengubah tegangan motor kembali.•Dengan memberi pulsa tegangan pada rangkaian RC, maka posisi motordapat ditentukan dalam rentang 0 hingga 1800C
Servo memiliki 3 kabel: 2 untuk daya dan ground, satu untuk kontrol
Kontrol motor servo
Mekatronika, Kuliah 4 16
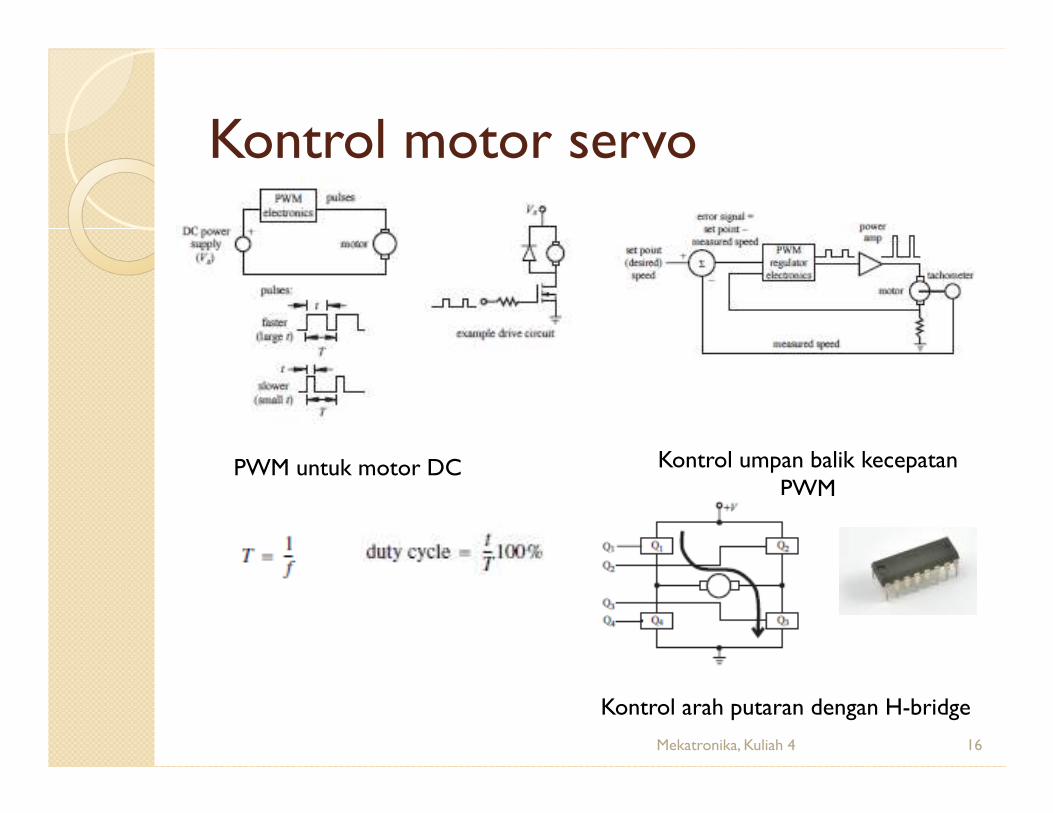
PWM untuk motor DC Kontrol umpan balik kecepatanPWM
Kontrol arah putaran dengan H-bridge
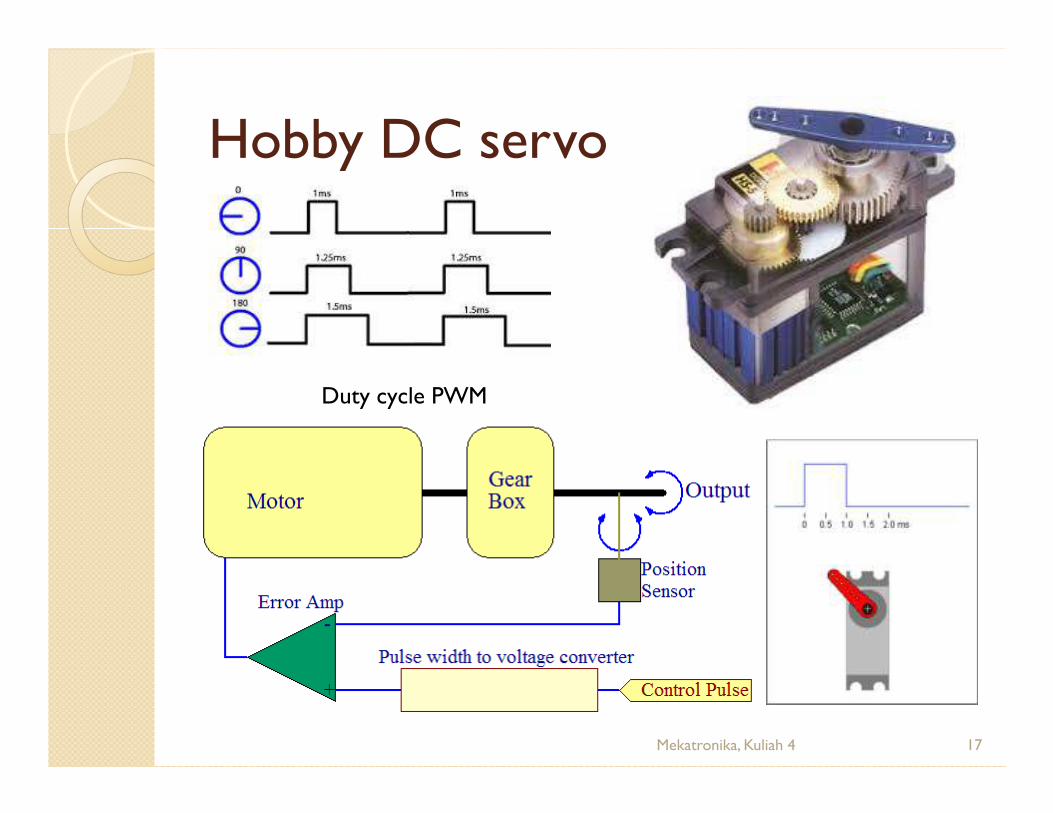
Hobby DC servo
Mekatronika, Kuliah 4 17
Duty cycle PWM
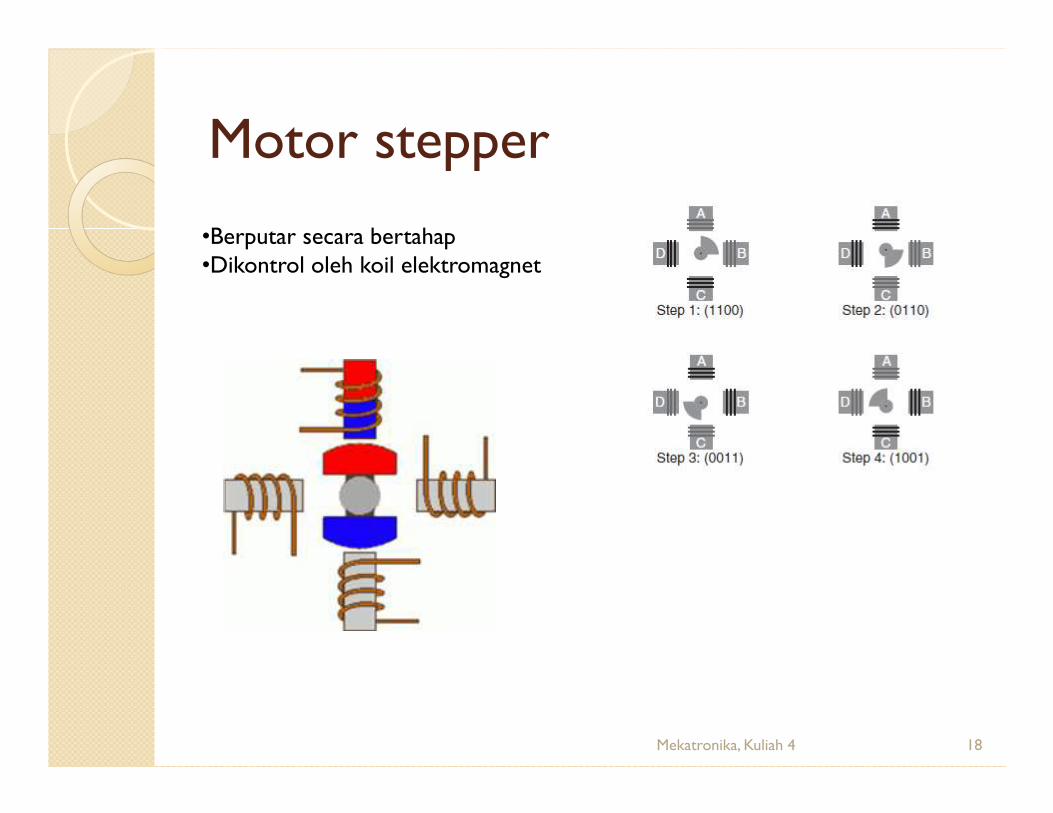
Motor stepper
Mekatronika, Kuliah 4 18
•Berputar secara bertahap•Dikontrol oleh koil elektromagnet
Pemilihan motor
� Momen inersia dari beban
� Torsi
� Daya
� Harga
Mekatronika, Kuliah 4 19
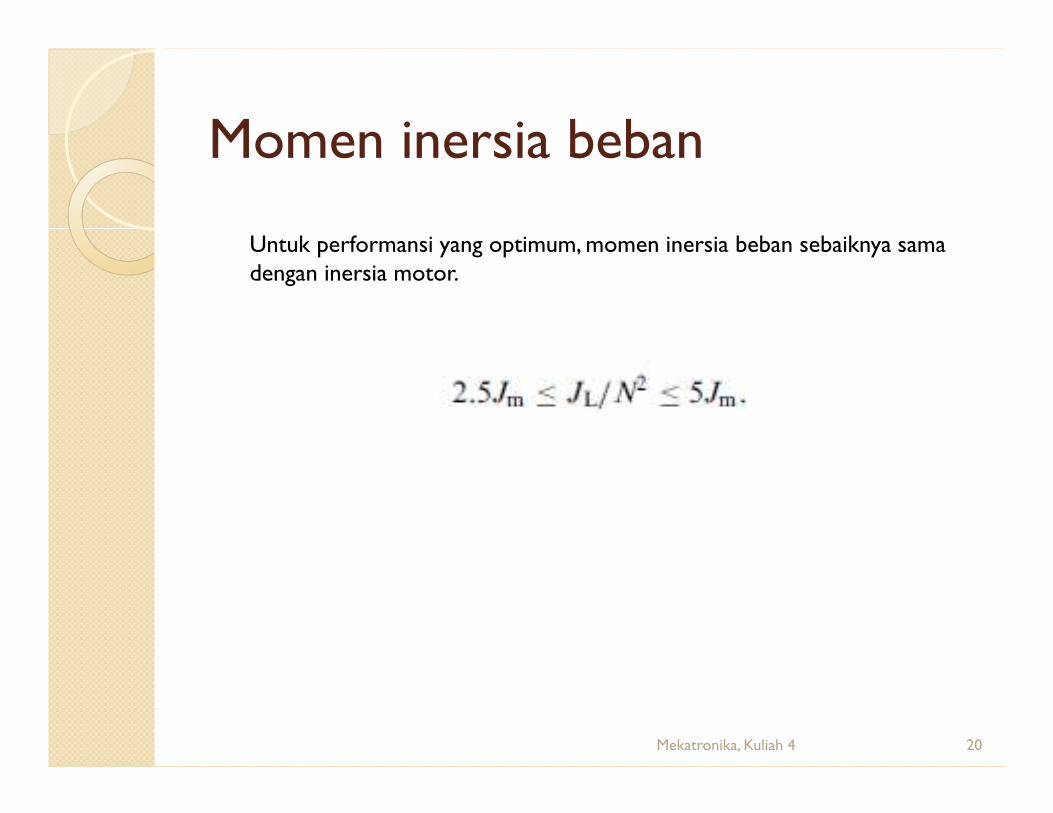
Momen inersia beban
Mekatronika, Kuliah 4 20
Untuk performansi yang optimum, momen inersia beban sebaiknya samadengan inersia motor.
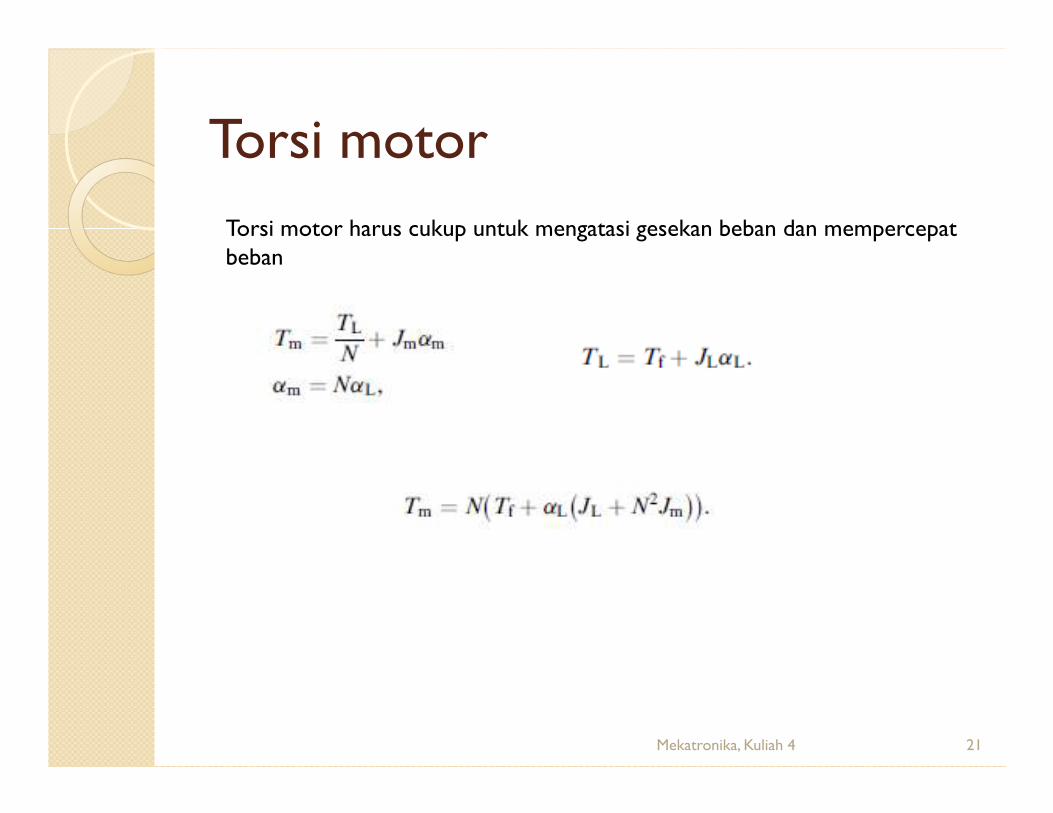
Torsi motor
Mekatronika, Kuliah 4 21
Torsi motor harus cukup untuk mengatasi gesekan beban dan mempercepatbeban
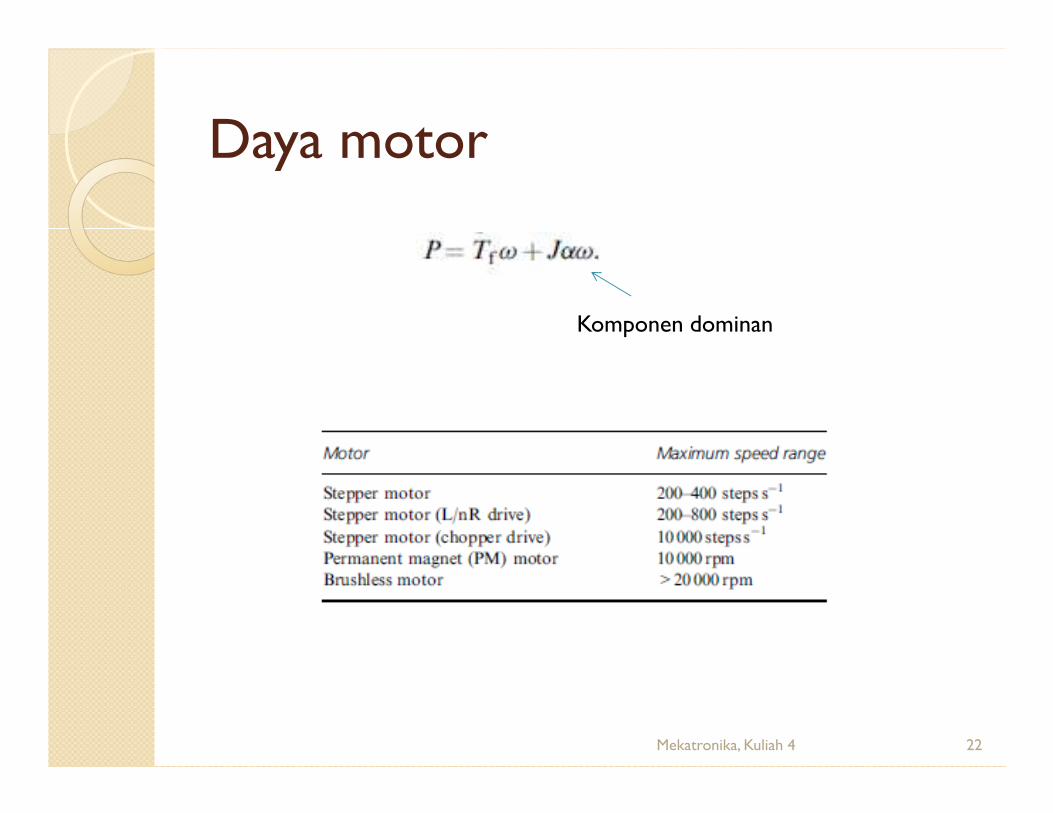
Daya motor
Mekatronika, Kuliah 4 22
Komponen dominan
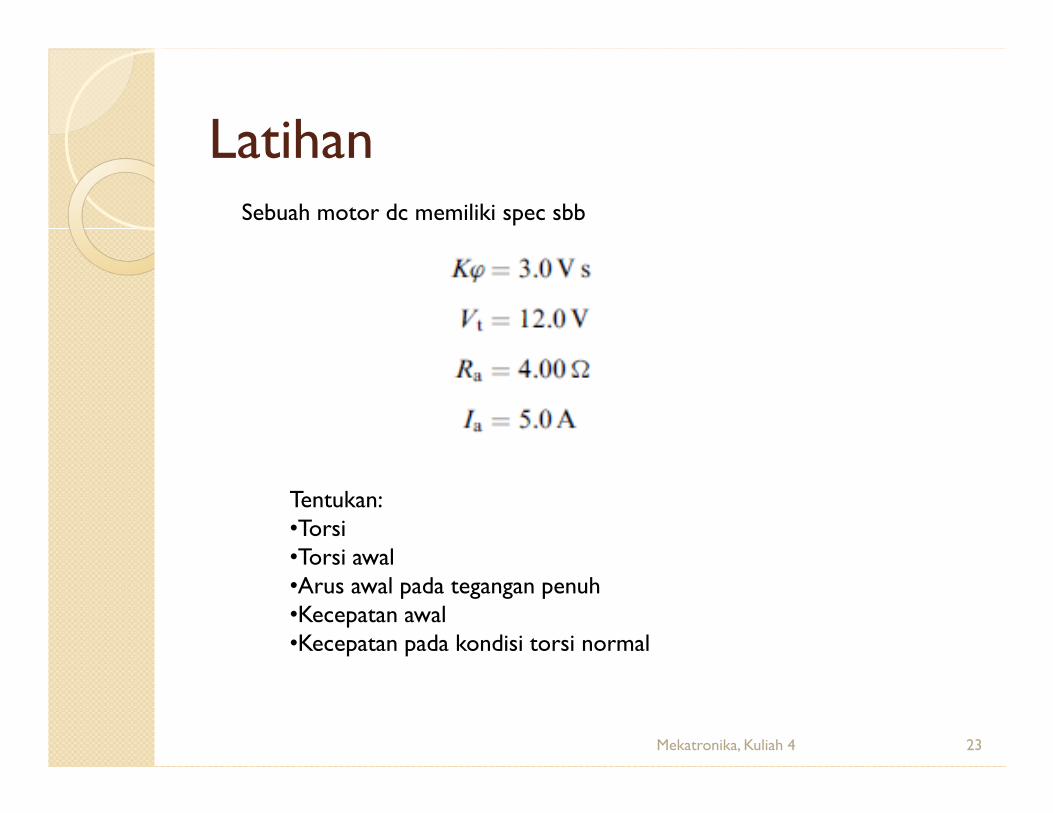
Latihan
Mekatronika, Kuliah 4 23
Sebuah motor dc memiliki spec sbb
Tentukan:•Torsi •Torsi awal•Arus awal pada tegangan penuh•Kecepatan awal•Kecepatan pada kondisi torsi normal





























