Embed Size (px)
Citation preview

AMORTIGUADORES SISMICOS

INTRODUCCION

INTRODUCCION
ES UNA ALTERNATIVA SISMORESISTENTE DE ESTRUCTURAS, CUYO OBJETIVO ES BRINDAR UN MAYOR DESEMPEÑO SÍSMICO DE LOS EDIFICIOS, ANTE FENÓMENOS TELÚRICOS; AUMENTANDO EL NIVEL DE SEGURIDAD PARA LAS PERSONAS Y LA OPERABILIDAD DE LAS ESTRUCTURAS DESPUÉS DE UN SISMO.

INTRODUCCION
DESPLAZAMIENTO
DEFORMACION
LIBERACION DE ENERGIA
EL SISMO, ACTÚA COMO UNA FUERZA QUE PRODUCE:

INTRODUCCION
LOS DISPOSITIVOS AISLADORES ACTUAN COMO:
DISIPADORES
AISLANTES
AMORTIGUADORES
• BALANCEANDO LA ENERGÍA ELÁSTICA Y MODIFICANDO EL DESPLAZAMIENTO

INTRODUCCION

SISMICIDAD MUNDIAL Y LOS LÍMITES TECTÓNICOS

RIESGOS SISMICOS
Las construcciones en zonas sísmicas se incrementan a diario en nuestro país. En consecuencia, la seguridad estructural tiene un valor importante en el desarrollo nacional. La reducción de los costos, con la consecuente seguridad de las obras en zonas sísmicas es el problema central de la construcción en nuestro país. La razón fundamental en la solución de este problema es la elaboración de metodologías de cálculo sísmico de edificaciones.

IMPORTANCIA DE INGENIERÍA SISMICA
La importancia de la ingeniería sísmica radica, en los efectos destructivos de estos fenómenos naturales, causando grandes daños materiales y lo más lamentable las irreparables pérdidas humanas.

ASPECTOS DE LA VULNERABILIDAD SISMICA
1. ASPECTOS FUNCIONALES.
2. ASPECTOS NO ESTRUCTURALES.
3. ASPECTOS ESTRUCTURALES.
4. ASPECTOS ORGANIZACIONAL.

GENERALIDADES

VIBRACIONES DE UN SISTEMA DE UN GRADO DE LIBERTAD
Oscilador de un grado de libertad con vibración libre no amortiguada.
Oscilador de un grado de libertad con vibración libre amortiguada.
Oscilador de un grado de libertad, sometido a una carga armónica.
Oscilador de un grado de libertad con excitación basal (caso sísmico).

VIBRACIONES DE UN SISTEMA DE UN GRADO DE LIBERTAD
En todos estos casos supondremos que la masa del sistema se concentrará en un punto y que este puede desplazarse solo en una dirección (sistema de un grado de libertad). Se entenderá por vibración libre aquella en la que no existe una fuerza impulsadora periódica que realimente el movimiento.

IDEALIZACIÓN DE UN SISTEMA DE UN GRADO DE LIBERTAD NO AMORTIGUADO
OSCILADOR DE UN GRADO DE LIBERTAD CON VIBRACIÓN LIBRE NO AMORTIGUADA

Antes de estudiar la respuesta de una estructura sometida a una solicitación dinámica, es conveniente determinar detalladamente las propiedades vibratorias naturales de la estructura, independiente de las características de la excitación. Para esto se considera la situación conocida como vibración libre y que corresponde al movimiento vibratorio que desarrolla la estructura cuando esta libre de toda excitación externa.

ECUACIÓN DIFERENCIAL
Si las condiciones iniciales para t=0 son:

La solución general de esta ecuación corresponde a una vibración sinusoidal del tipo donde:
Donde:ω: Frecuencia propia o natural de vibración del sistemau0: Amplitud del movimiento.k: Corresponde a la rigidez del sistema.m: Corresponde a la masa del sistema.φ: Ángulo de fase.

Movimiento armónico simple

PERIODO DE VIBRACIÓN
Donde:
T: Periodo natural de vibraciónω: Frecuencia propia o natural de vibración del
sistema

OSCILADOR DE UN GRADO DE LIBERTAD CON VIBRACIÓN LIBRE AMORTIGUADA
Amortiguamiento viscoso
Amortiguamiento de fricción
Amortiguamiento estructural

AMORTIGUAMIENTO VISCOSO
En la práctica, debido principalmente a simplificaciones analíticas, el tipo de amortiguamiento más usado en las idealizaciones dinámicas es el amortiguamiento viscoso.
El comportamiento de una estructura de un grado de libertad con una fuerza de amortiguamiento se puede idealizar como en la figura siguiente.

Idealización de un Sistema de un grado de libertad con Amortiguamiento Viscoso

ECUACIÓN DIFERENCIAL
Donde:ω: Frecuencia propia o natural de vibración del sistemaξ: Razón de amortiguamiento crítico, que corresponde a
la razón del coeficiente de amortiguamiento y el amortiguamiento crítico.

El amortiguamiento crítico corresponde al máximo valor que puede tener el coeficiente de amortiguamiento, para que se pueda tener un movimiento vibratorio y esta dado por la expresión:

TIPOS DE MOVIMIENTO
c = ccr o ξ = 1, el sistema retorna a la posición de equilibrio sin oscilar, este corresponde a un movimiento “Críticamente Amortiguado”.
c > ccr o ξ > 1, el sistema nuevamente retorna a la posición de equilibrio sin oscilar, este corresponde a un movimiento “Sobreamortiguado”.
c < ccr o ξ < 1, el sistema oscila sobre la posición de equilibrio, de tal forma que la amplitud del movimiento decrece en forma progresiva, este corresponde a un movimiento “Subamortiguado”.

VIBRACIÓN LIBRE DE UN SISTEMA AMORTIGUADO
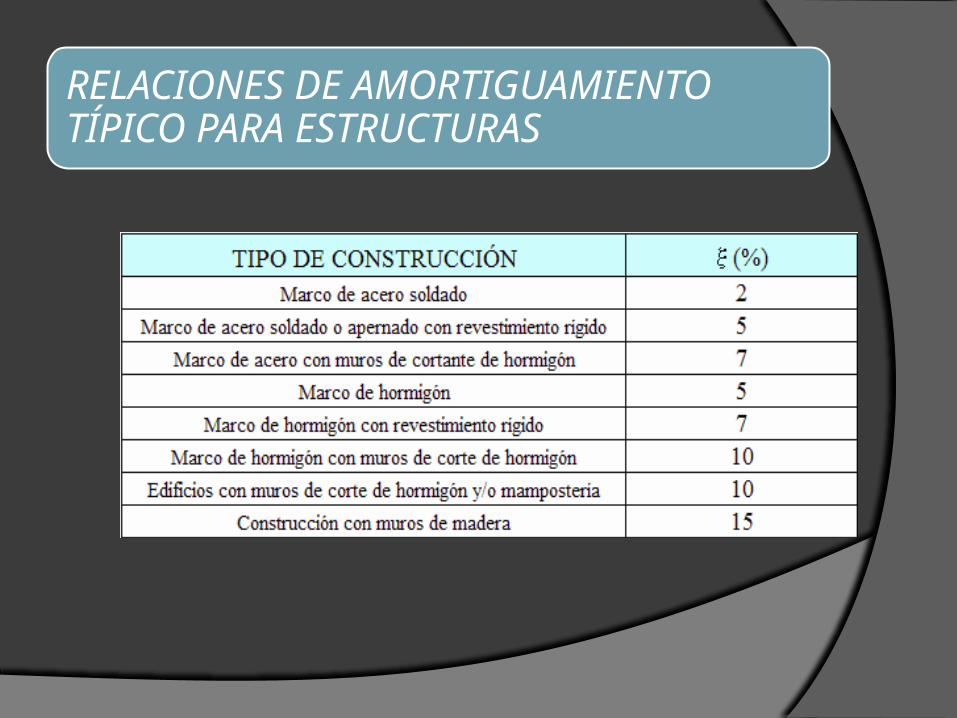
RELACIONES DE AMORTIGUAMIENTO TÍPICO PARA ESTRUCTURAS

SISTEMA SUBAMORTIGUADO
Donde:ω: Frecuencia propia o natural de vibración del sistema
ξ: Razón de amortiguamiento crítico, que corresponde a la razón del coeficiente de amortiguamiento y el amortiguamiento crítico
ωD: Frecuencia amortiguada del sistema

Donde:u0: Es la amplitud máxima del movimiento.φ: Ángulo de fase.

VIBRACIÓN LIBRE DE UN SISTEMA AMORTIGUADO Y OTRO NO AMORTIGUADO

PERIODO AMORTIGUADO DE VIBRACIÓN
Sustituyendo para el valor extremo ξ=0,1 en la ecuación se obtiene:

VIBRACIÓN LIBRE PARA DIFERENTES PORCENTAJES DE AMORTIGUAMIENTO CRÍTICO

OSCILADOR DE UN GRADO DE LIBERTAD SOMETIDO A UNA EXCITACIÓN ARMÓNICA
La respuesta de un sistema de un grado de libertad bajo una excitación armónica es un tópico clásico en dinámica de estructuras, no solo porque tal excitación es encontrada en ciertos sistemas mecánico.
Donde:
P0: Es la amplitud de la excitación.
p: Es la frecuencia excitadora.

La solución de la ecuación 2.14, está compuesta por dos términos:
1. Una componente debida a la vibración libre, propia del sistema, que se denomina “componente transiente” del movimiento por cuanto decae y tiende a desaparecer por efecto del amortiguamiento.
2. Una componente debida a la energía entregada al sistema por la excitación externa que se denomina “componente o estado de régimen” del movimiento, por cuanto es la componente de la respuesta que prevalece una vez atenuada la vibración libre.
Donde:
A, B, C y D: Son constantes que dependen de las condiciones iniciales.

Así que considerando solo el estado de régimen
Donde:
X: Es la amplitud del movimiento.
p: Es la frecuencia de la excitación.
φ: Ángulo de fase de la respuesta con respecto a la excitación.

OSCILADOR DE UN GRADO DE LIBERTAD CON EXCITACIÓN BASAL
Sistema de un grado de libertad sometido a una excitación basal

Ecuación diferencial que gobierna el movimiento de vibración de un sistema amortiguado de una estructura de un grado de libertad, sometido a una excitación basal ug se puede derivar a partir del modelo simplificado
Donde:
ω: Frecuencia propia o natural de vibración del sistema
ξ: Razón de amortiguamiento crítico, que corresponde a la razón del coeficiente de amortiguamiento y el amortiguamiento crítico

La solución de la ecuación esta dado por
ESPECTRO DE RESPUESTA:
Valores Máximos deformación (deformación espectral) la aceleración (aceleración espectral) y esfuerzo interno en la estructura debido a la excitación sísmica son:

Valores Máximos deformación (deformación espectral) la aceleración (aceleración espectral) y esfuerzo interno en la estructura debido a la excitación sísmica son:
Donde:Sd: Deformación espectral.Sa: Aceleración espectral.Qmáx: Esfuerzo máximo en la estructura
Los espectros definidos se denominan espectros de respuesta y tienen la siguiente interpretación física:
a) Espectro de velocidades: Es una medida de la energía máxima almacenada en el sistema.
b) Espectro de deformaciones: Corresponde a una medida de la deformación máxima que alcanza la estructura.
c) Espectro de aceleraciones: Corresponde a la aceleración máxima del sistema y por lo tanto es una medida de la fuerza sísmica máxima.

SISTEMAS DE CONTROL ESTRUCTURAL

SISTEMAS DE CONTROL ACTIVO

EL ACTIVE MASS DAMPER (AMD)

SISTEMAS DE CONTROL HIBRIDO
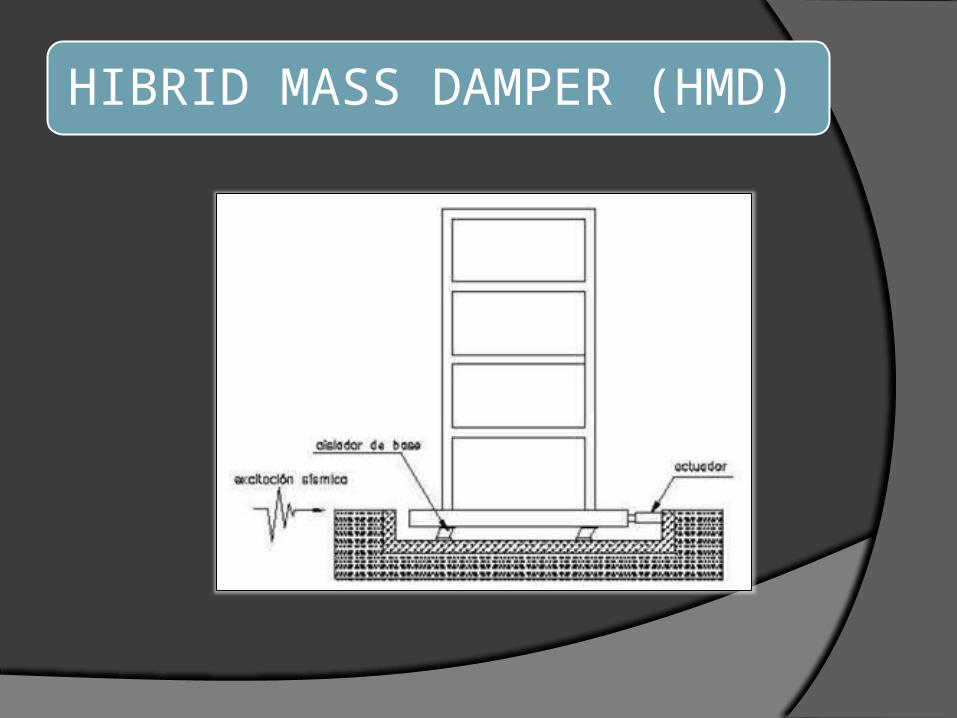
HIBRID MASS DAMPER (HMD)

SISTEMAS DE CONTROL SEMIACTIVO

SISTEMAS DE CONTROL SEMIACTIVO
Algunas de las técnicas de control empleadas por los sistemas semiactivos son:
La fricción variable El movimiento de masas de líquido en el interior de
tanques (Tunes Sloshing Dampers) o columnas dentro del edificio (Tuned Liquid Column Dampers).
La incorporación de dispositivos hidráulicos de rigidez o amortiguamiento variable.
Amortiguadores con fluidos de viscosidad controlable a partir de campos eléctricos o magnéticos

SISTEMAS DE CONTROL SEMIACTIVO
Dispositivo para control semiactivo

SISTEMAS DE CONTROL SEMIACTIVO

SISTEMAS DE CONTROL SEMIACTIVO

SISTEMAS DE CONTROL PASIVO
Los dispositivos pasivos son elementos de carácter reactivo, cuya respuesta no es controlable y depende únicamente de las condiciones de trabajo en que se encuentran. Estos intervienen alterando las propiedades dinámicas del edificio y provocando una reducción de su respuesta estructural

SISTEMAS DE CONTROL PASIVO
CONTROL PASIVO CON AISLAMIENTO EN LA BASE

SISTEMAS DE CONTROL PASIVO

AYUNTAMIENTO DE LOS ÁNGELES
Tenemos el edificio Ayuntamiento de Los Ángeles. Este cuenta con dispositivo de neopreno zunchado con núcleo de plomo, además tiene incorporado dispositivos viscoelásticos para contrarrestar los efectos de momento que se generan por la relación ancho altura.

Compañía de Seguros Sumitomo, Kobe, Japón. 22 aisladores elastoméricos

SISTEMAS DE CONTROL PASIVO
LA CATEDRAL DE NUESTRA SEÑORA DE LOS ÁNGELES
MUNICIPAL SERVICES BUILDING, GLENDALE

SISTEMAS DE CONTROL PASIVO
Un segundo grupo de aisladores de base corresponde a los de fricción

AISLADOR PENDULAR
Sistema de aislamiento basado en el movimiento pendular del edificio sobre las superficies cóncavas de los aisladores de base

SISTEMAS DE CONTROL PASIVO
Los Ángeles City Hall, Los Ángeles, USA. 450 aisladores elastoméricos, 70 apoyos deslizantes y 70 amortiguadores viscosos
Parlamento de Nueva Zelanda, Wellington, Nueva Zelanda.375 aisladores elastoméricos (145 con corazón de plomo) y 42 aisladores friccionales

SISTEMAS DE CONTROL PASIVO
Aeropuerto Internacional de Estambul, Estambul, Turquía.130 péndulos friccionales (FPS).

SISTEMAS DE CONTROL PASIVO
El Tuned Mass Damper (TMD) consta de los siguientes componentes:
Un oscilador de un grado de libertad.
Un mecanismo de muelle.
Un mecanismo de amortiguamiento.
CONTROL PASIVO CON SISTEMAS INERCIALES ACOPLADOS

SISTEMAS DE CONTROL PASIVO
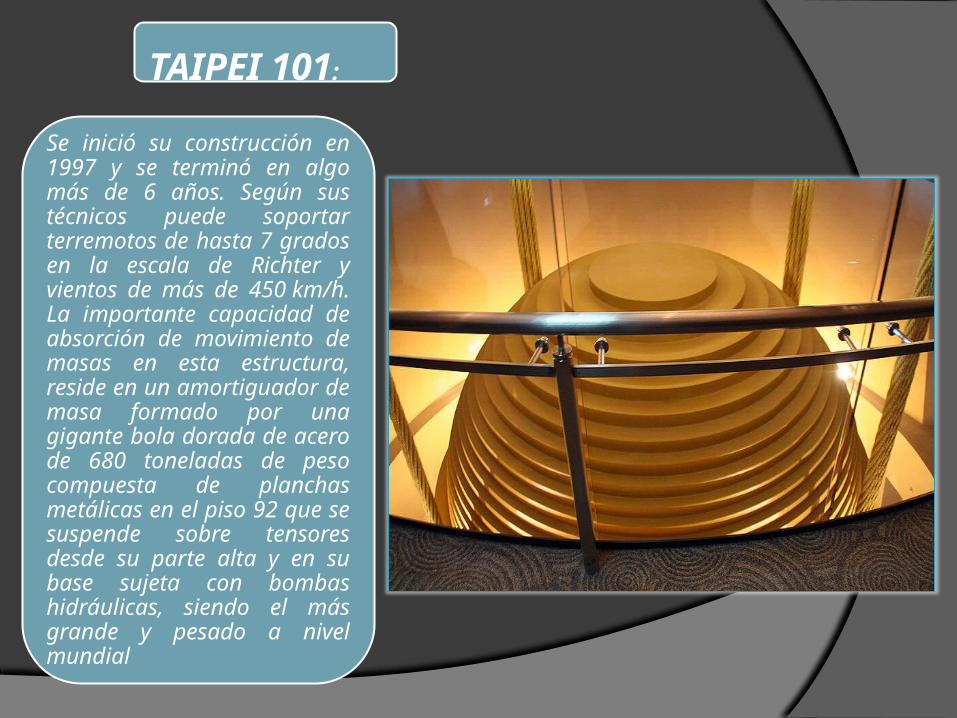
TAIPEI 101:
Se inició su construcción en 1997 y se terminó en algo más de 6 años. Según sus técnicos puede soportar terremotos de hasta 7 grados en la escala de Richter y vientos de más de 450 km/h. La importante capacidad de absorción de movimiento de masas en esta estructura, reside en un amortiguador de masa formado por una gigante bola dorada de acero de 680 toneladas de peso compuesta de planchas metálicas en el piso 92 que se suspende sobre tensores desde su parte alta y en su base sujeta con bombas hidráulicas, siendo el más grande y pesado a nivel mundial


DISPOSITIVOS PASIVOS DE DISIPACION DE ENERGIA
DISIPADORES HISTERETICOS
DISIPADORES POR PLASTIFICACION DE METALES
La plastificación de metales en disipadores se puede producir a partir de esfuerzos estructurales o bien a partir del proceso de extrusión. Cualquier esfuerzo, sea de torsión, flexión, cortante o axial puede conducir a procesos de plastificación en metales. El acero ha sido sin duda el metal más empleado en disipadores. Entre sus virtudes están las posibilidades constructivas que ofrece, su bajo costo y su elevada ductilidad
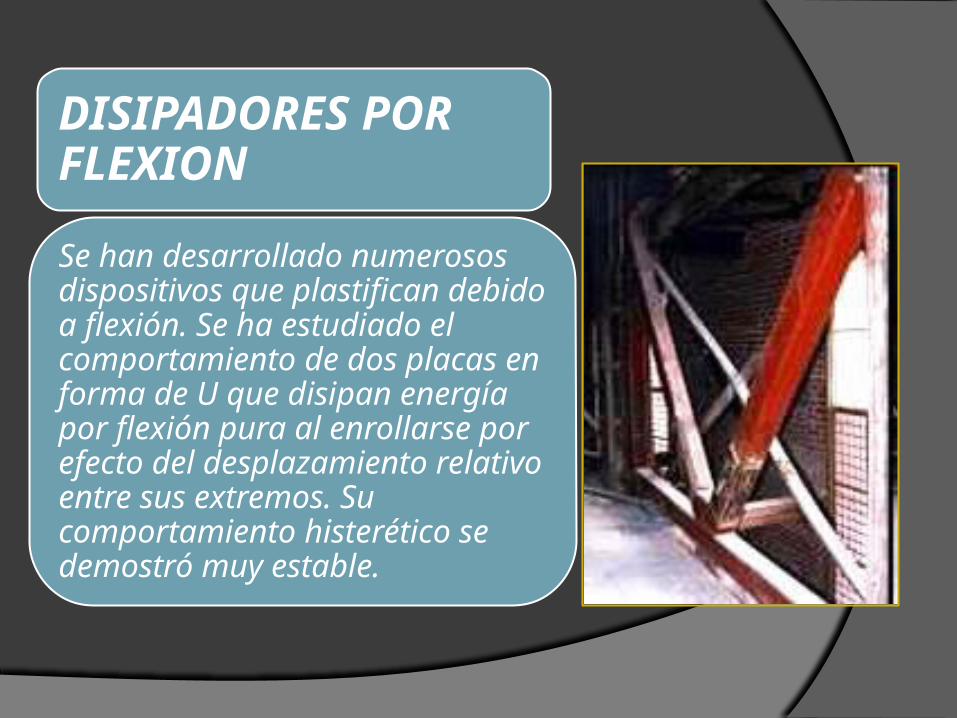
DISIPADORES POR FLEXION
Se han desarrollado numerosos dispositivos que plastifican debido a flexión. Se ha estudiado el comportamiento de dos placas en forma de U que disipan energía por flexión pura al enrollarse por efecto del desplazamiento relativo entre sus extremos. Su comportamiento histerético se demostró muy estable.

TIPO ADAS
Uno de los disipadores más conocidos y estudiados es el conocido sistema con el nombre de ADAS (Added Damping And Stiffness), el cual es un dispositivo formado por un conjunto de chapas en paralelo, de espesor constante y sección variable en forma de X frontalmente es similar a dos trapecios unidos por la base menor.


TIPO TADAS
El dispositivo indicado en la es conocido como el sistema TADAS. Al igual que el ADAS, está formado por un conjunto de placas trapezoidales de acero paralelas y de espesor constante

TIPO HONEYCOMB
Su geometría tiene como objeto una plastificación lo más uniforme posible en la zona disipativa. Su comportamiento histerético es muy estable y de forma casi rectangular, con una respuesta más próxima a la rígida-plástica que es el caso del ADAS, la cual es más flexible.

DISIPADORES HISTERETICOS-TIPO HONEYCOMB

TIPO DUR
Se han desarrollado el disipador que se establece a partir de la flexión de pernos que permiten ser colocados como diagonales de arriostramiento, logrando así unos elementos prácticamente independientes de las acciones verticales y que resultan muy fáciles de instalar. Los disipadores están avalados por una amplia campaña de ensayos, a partir de la cual se establecen modelos de predicción del comportamiento y de su capacidad última disipativa bajo la acción sísmica.

DISPOSITIVOS A CORTANTE
El sistema estructural de los brazos excéntricos es el precursor de los disipadores a cortante. La mayoría de los disipadores adoptan una geometría similar: sección en doble T con alma rigidizada. Este sistema era de una gran ductilidad que permitía ciclos histeréticos estables y de gran capacidad disipativa siempre que la rigidización fuera correcta

CON UN SOLO CUERPO DISIPADOR
Los paneles de cortante son placas de acero rigidizadas y su estructura, con rigidizadores distanciados, obliga a espesores relativamente importantes para evitar el problema de la abolladura. Los aceros de alta ductilidad y bajo límite elástico (80MPa, 46-60 % de alargamiento) se muestran de gran interés para permitir espesores mayores a iguales esfuerzos cortantes, con una inferior necesidad de rigidización.

CON SECCIÓN EN DOBLE T Y ALMA RIGIDIZADA
En 1998 se analizó el comportamiento de un dispositivo de cortante con sección en doble T y alma rigidizada, diseñado para actuar como nexo entre un pórtico y su arriostramiento en A. Su unión con los brazos de arriostramiento, mediante bulones, admite solo la acción horizontal, libre de momento y de acción vertical. Con ello se consigue desacoplar el sistema rígido del sistema flexible y reducir solicitaciones de montaje.

TIPO TIG
En 1998 se desarrolló un dispositivo a partir de placas soldadas de aluminio mediante procedimiento TIG. El disipador permite cargas de plastificación reducidas con espesores superiores a los necesarios con acero dúctil. Para evitar problemas de fragilidad, los rigidizadores del alma están únicamente soldados a las alas y produce un normalizado final de tensiones

DISPOSITIVOS BASADOS EN LA EXTRUSION DE METALES
Se diseña el PVD (Pinguin Vibration Damper) en 1976, el cual permite disipar energía a partir de la extrusión del plomo. En la figura inferior se muestra un esquema de este sistema, en el cual el plomo pasa por un orificio y forzado a un cambio de sección, disipando energía. Su respuesta histerética resulta muy estable, tras muchos ciclos de desplazamiento.

DISPOSITIVOS PASIVOS DE DISIPACION DE ENERGIA
DISIPADORES HISTERETICOS
DISIPADORES POR FRICCION
Los sistemas de fricción disipan energía, basándose en el rozamiento existente entre dos superficies en contacto bajo presión y en el deslizamiento entre ellas. La fuerza de fricción en cada conexión es igual al producto de la fuerza normal por el coeficiente de rozamiento.

SISTEMA PALL
El sistema mostrado en la figura siguiente, permite ser emplazado en la intersección de un arriostramiento en X siendo sus curvas histeréticas prácticamente rectangulares con lo cual la energía disipada por ciclo es máxima para un determinado valor de la fuerza de deslizamiento

SLOTTED BOLT FRICTION DAMPER
El mayor inconveniente que presentan los dos dispositivos disipadores mencionados anteriormente es que el coeficiente de fricción, durante el desplazamiento, depende de la velocidad, de la presión normal y de las condiciones de las superficies en contacto, resultando difícil garantizar un coeficiente de fricción independiente del tiempo y de las condiciones de los disipadores.

TIPO SHAPIA
En 1998 se diseñó un disipador de fricción de concepción distinta a los dos anteriormente descritos, ya que mientras los dos primeros generan las fuerzas de fricción a través de uniones atornilladas, este disipador las obtiene a partir del deslizamiento entre una serie de anillos interiores y exteriores.

DISPOSITIVOS PASIVOS DE DISIPACION DE ENERGIA
DISIPADORES CON COMPORTAMIENTO VISCOELASTICO
DISIPADORES VISCOELASTICOS
Los disipadores viscoelásticos han sido empleados con éxito, durante los últimos treinta años, para reducir la respuesta de edificios altos ante la acción del viento. De forma más reciente se ha estudiado su utilización con fines sismorresistentes. Los disipadores viscoelásticos sólidos están formados con chapas metálicas unidas con capas finas de material viscoelástico y presentan unos ciclos histeréticos característicos elípticos
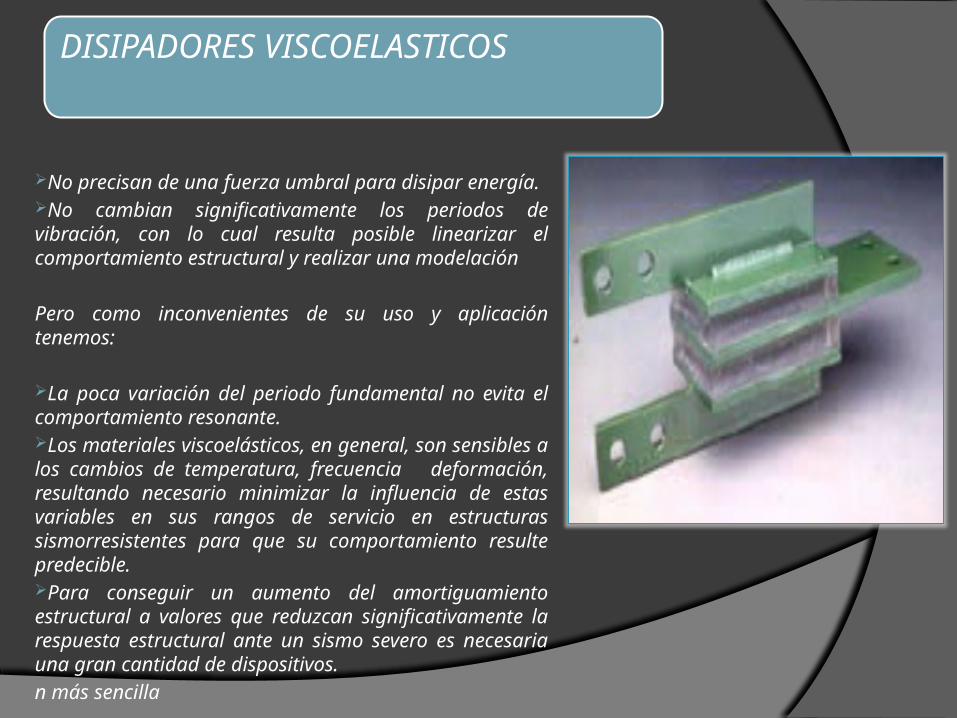
DISIPADORES VISCOELASTICOS
No precisan de una fuerza umbral para disipar energía.No cambian significativamente los periodos de vibración, con lo cual resulta posible linearizar el comportamiento estructural y realizar una modelación
Pero como inconvenientes de su uso y aplicación tenemos:
La poca variación del periodo fundamental no evita el comportamiento resonante.Los materiales viscoelásticos, en general, son sensibles a los cambios de temperatura, frecuencia deformación, resultando necesario minimizar la influencia de estas variables en sus rangos de servicio en estructuras sismorresistentes para que su comportamiento resulte predecible.Para conseguir un aumento del amortiguamiento estructural a valores que reduzcan significativamente la respuesta estructural ante un sismo severo es necesaria una gran cantidad de dispositivos.
n más sencilla

DISIPADORES DE FLUIDO VISCOSO
Un disipador de fluido viscoso es un dispositivo que disipa energía aplicando una fuerza resistiva a un desplazamiento finito. La fuerza de salida del disipador es resistiva y actúa en la dirección opuesta al movimiento de entrada.

DISIPADORES DE FLUIDO VISCOSO
Los disipadores de fluido viscoso tienen la propiedad de reducir simultáneamente los esfuerzos y las deflexiones
de la estructura
Estos dispositivos son dependientes de otros parámetros aparte de la velocidad.
Los disipadores de fluido viscoso son esencialmente mecanismos llenos de fluido, el cual debe ser capaz de mantenerse en servicio durante grandes períodos de
tiempo sin mantenimiento.

DISIPADOR DE ENERGÍA DE FLUIDO VISCOSO

FUNCIONAMIENTO DE UN DISIPADOR DE FLUIDO VISCOSO

En la industria de la construcción, los Amortiguadores de Fluido Viscoso se utilizan para reducir las cargas debido a una excitación sísmica, estos dispositivos se ubican en la estructura en forma estratégica, tal que se activen durante el desplazamiento relativo entre dos pisos contiguos del edificio excitado. La instalación puede hacerse de varias maneras:
Colocando los amortiguadores horizontalmente, para ligar de manera flexible el vértice de unión de las diagonales en forma de “V” invertida, fijada en un piso inferior, con el nivel inmediato superior.
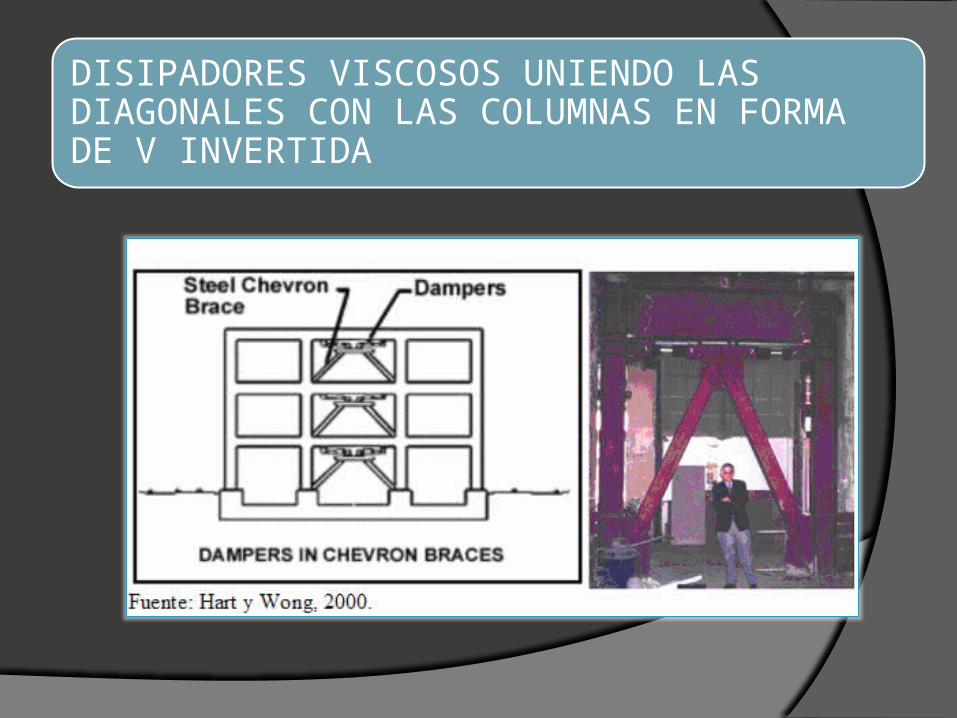
DISIPADORES VISCOSOS UNIENDO LAS DIAGONALES CON LAS COLUMNAS EN FORMA DE V INVERTIDA

DISIPADORES VISCOSOS UBICADOS EN LA DIAGONAL

DISIPADORES VISCOSOS UBICADOS EN LA BASE DEL EDIFICIO
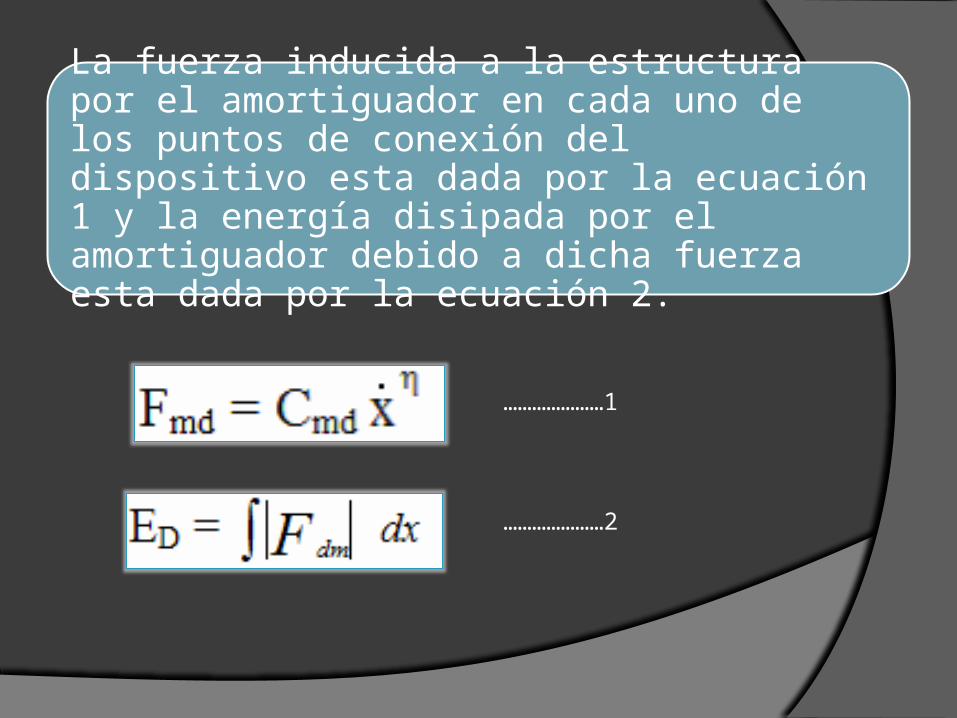
La fuerza inducida a la estructura por el amortiguador en cada uno de los puntos de conexión del dispositivo esta dada por la ecuación 1 y la energía disipada por el amortiguador debido a dicha fuerza esta dada por la ecuación 2.
…………………1
…………………2

Donde:
Fmd: Fuerza de amortiguamiento del dispositivo.
Cmd: Coeficiente de amortiguamiento del dispositivo.
x: Desplazamiento relativo entre los extremos del dispositivo.
ẋ: Es la velocidad relativa entre los extremos del amortiguador
η: Exponente de la velocidad, 0,25<η<2,0

Relación Velocidad V/S Fuerza del Disipador

DISIPADOR DE ENERGÍA DE FLUIDO VISCOSO FABRICADO POR LA COMPAÑÍA TAYLOR DEVICE INC.
Taylor Device Inc. es una compañía americana ubicada en Tonawanda del norte (New York). Esta empresa se ha dedicado a la fabricación de Disipadores de Energía de Fluido Viscoso desde 1955. Hasta fines de la década de los 80, los dispositivos que ellos desarrollaban eran de uso exclusivo del gobierno americano, en la industria militar y de defensa.
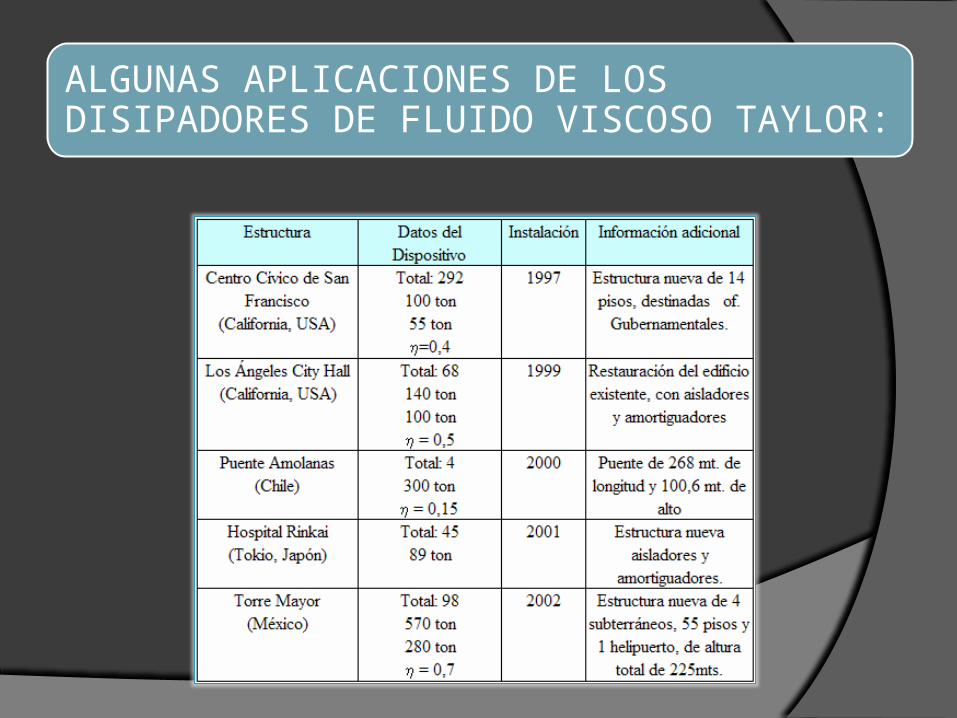
ALGUNAS APLICACIONES DE LOS DISIPADORES DE FLUIDO VISCOSO TAYLOR:

PUENTE AMOLANAS
El Puente Amolanas se encuentra ubicado en el km 310 de la Ruta 5 Norte, en la quebrada del mismo nombre. Es un puente recto de sección continua de 268 m de longitud y con una altura de 100,6 mts. sobre el cauce lo que lo convierte en el puente vial más alto de Chile.

TORRE MAYOR:
Los dispositivos (un total de 98) fueron instalados en forma estratégica desde el piso 13 al 57, con el objeto de reducir las solicitaciones y sin exponer las reservas de resistencia de la estructura por ductilidad.





























