Embed Size (px)
Citation preview

ANALISIS DE SEÑALES Y SISTEMAS I
Universidad de La Salle Victoria
Ingeniería Biomédica
Discentes 6to Semestre
1er Parcial

Análisis de Sistemas y Señales I
Descripción matemática de señales

2.1 DESCRIPCIÓN MATEMÁTICA DE SEÑALES
• En el análisis de señales y sistemas, las señales se describen (en lamedida posible) mediante .
• La es el fenómeno físico real que lleva información, y laes una descripción matemática de la señal. Aun cuando los dosconceptos son distintos, la relación entre una señal y la funciónmatemática que la describe es tan íntima que ambos términos seusan casi indistintamente en el análisis de señales y sistemas.
OBJETIVOS DEL CAPITULO
1.Definir algunas que pueden utilizarse paradescribir diversos tipos de señales.
2.Formular de transformación y combinación de esasfunciones en formas útiles para representar .
3.Reconocer ciertas y utilizarlos para simplificarel análisis de señales y sistemas.

2.2 COMPARACIÓN DE FUNCIONES EN TIEMPO CONTINUO Y EN TIEMPO
DISCRETO
FUNCIONES EN TIEMPO CONTINUO



MUESTREO Y TIEMPO DISCRETO
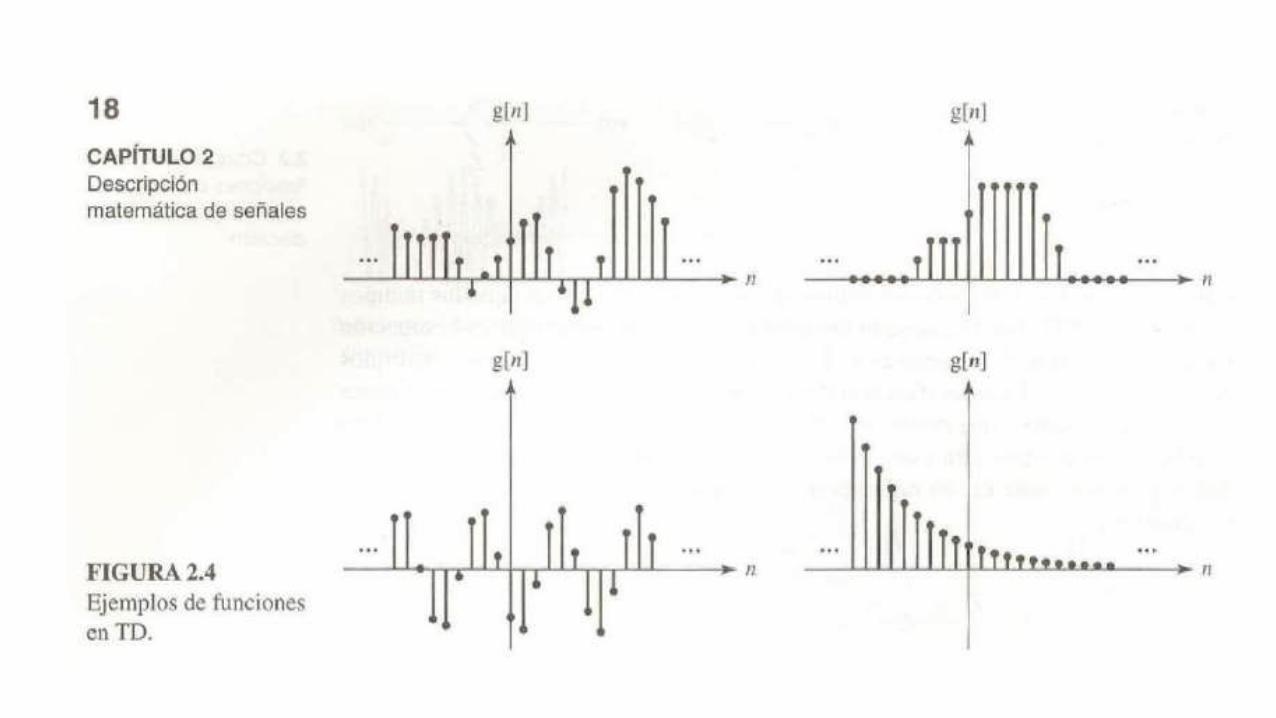
• Son de gran importancia en el análisis de señales y sistemas lasfunciones que se definen sólo en puntos discretos en el tiempo y noentre ellos. Éstas son funciones quedescriben a señales de tiempo discreto. Un ejemplo muy común deseñales son aquellas que se obtienen al muestrear señales en .
• Una se define sobre un , pero nonecesariamente es continua en todo punto en el tiempo.
• El significa la adquisición de valores de una señal en puntosdiscretos en el tiempo. (LOS VALORES A EXAMINAR EN LA SEÑALDEBEN SER PROPORCIONALES).


2.3 FUNCIONES DE SEÑALES EN TIEMPO
CONTINUO
EXPONENCIALES COMPLEJAS Y SENOIDES



OBSERVACIONES
• Sen y Cos son frecuencias periódicas, se repiten cada ciclo (cada 2PI)
• La frecuencia angular (como el numero de revoluciones en automóvil) (2PI = 360 grados)
• El ángulo en la formula es la fase
• TAREA: IDENTIDADES TRIGONOMETRICAS

OBSERVACIONES
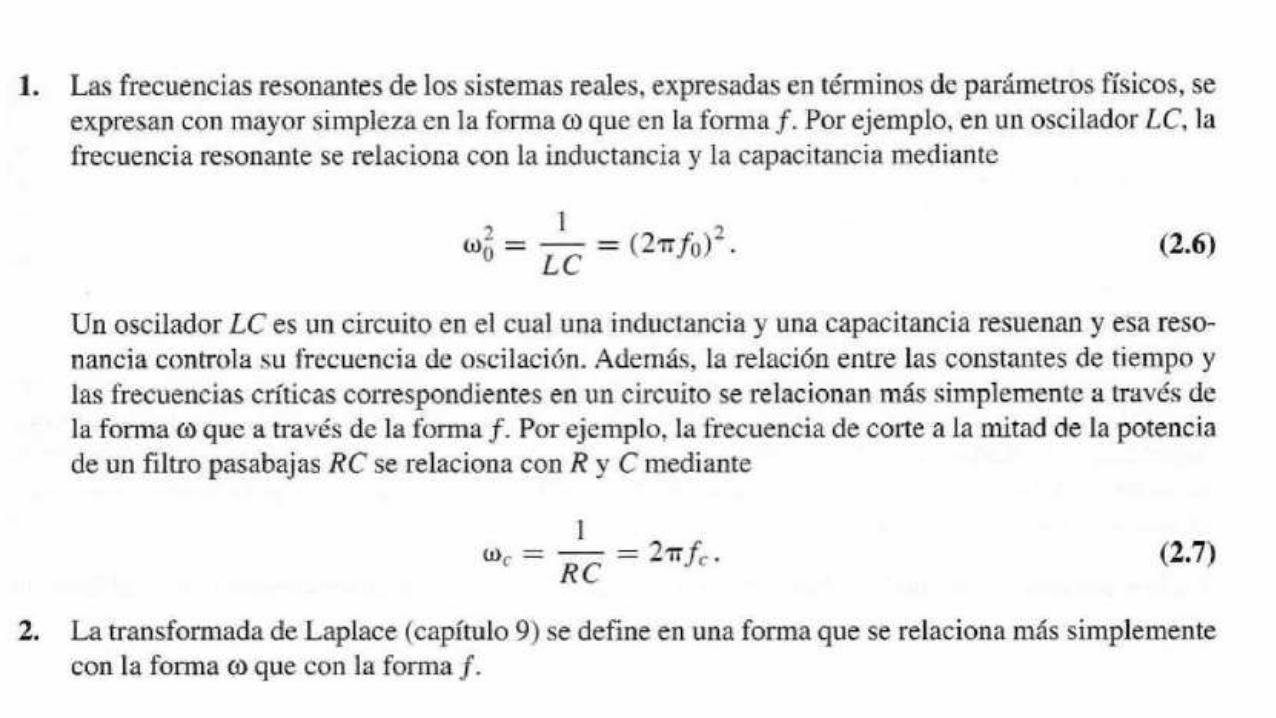
• L bobina
• C capacitor
• Pasabajas son frecuencias bajas en filtro basado en resistencia y capacitor
• Es el comportamiento de la señal que va pasando
• La señal puede ser un fenómeno físico
• El periodo fundamental es el mas pequeño en el que se repite
• To Periodo fundamental en tiempo
• Fo Frecuencia fundamental en Hz (1/To)


FUNCIONES CON DISCONTINUIDADES
• Los senos, cosenos y exponenciales en son continuos ydiferenciables en todo punto en el tiempo. Sin embargo, en lossistemas prácticos hay muchos otros tipos de señales enimportantes que son continuas o diferenciables en todo punto enel tiempo.
• Una operación muy común en los sistemas es lade una señal en algún tiempo especificado.

FUNCIONES SINGULARES Y FUNCIONES RELACIONADAS
• En el análisis de señales y sistemas existe unque se relacionan entre sí a través de quepueden utilizarse para describir matemáticamente señales que tienendiscontinuidades o derivadas discontinuas. Estas reciben el nombrede

La función escalón unitario
El escalón unitario se define y usa en el análisis de señales y sistemas debido a que puede
representar matemáticamente una acción muy común en los
sistemas físicos reales, la rápida conmutación de un
estado a otro.


OBSERVACIONES
• To cualquier tiempo (arbitraje)
• Las funciones deben de ser continuas a conveniencia
• Se representan sistemas como (apagado-encendido o el dollar en el día)
• Para darle la vuelta a la discontinuidad con las redefiniciones. (SACANDO EL PROMEDIO)
• Cuando sacamos los limites es una constante
• La constante siempre es la constante.
• T=t0 es continua porque es igual a 0
• H es escalón



4 parámetros para 3 intervalos


OBSERVACIONES
• Conmutación (apagado-encendido)
• Se le llaman unitario porque el valor máximo es 1



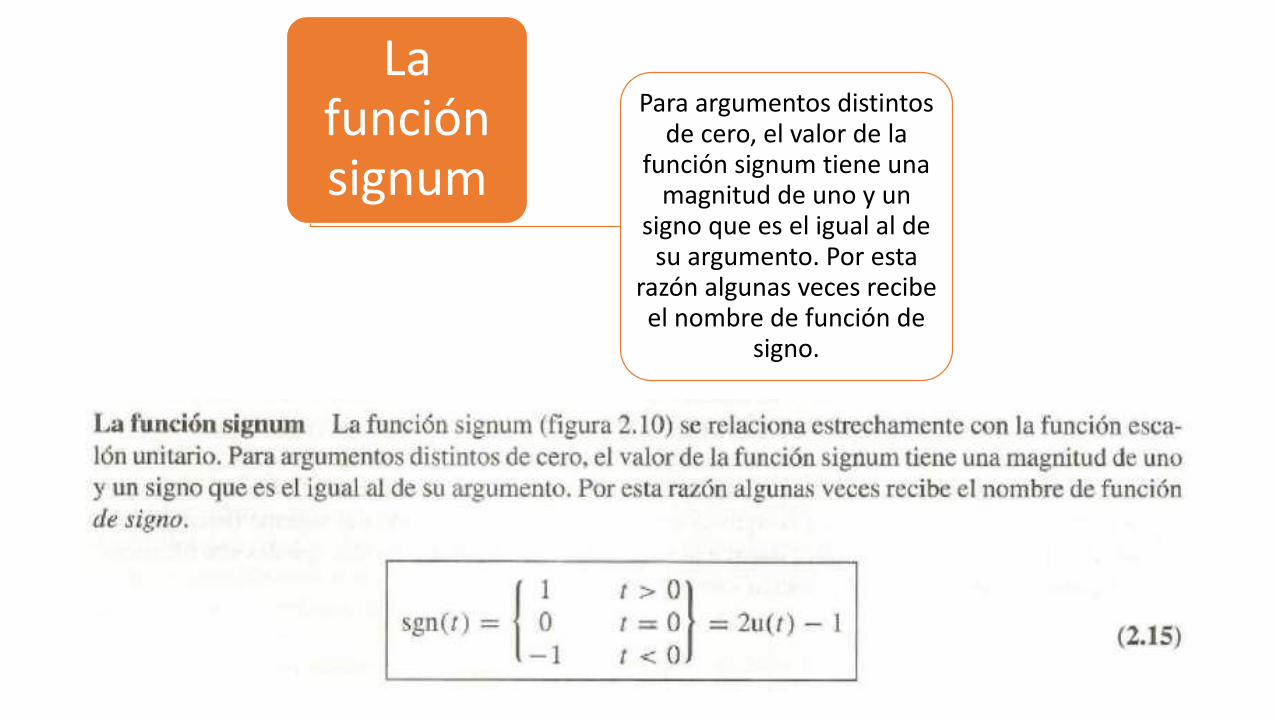
La función signum
Para argumentos distintos de cero, el valor de la
función signum tiene una magnitud de uno y un
signo que es el igual al de su argumento. Por esta
razón algunas veces recibe el nombre de función de
signo.
OBSERVACIONES
• U es el escalón unitario
• Foto de la relación entre escalón unitario y signum


La función rampa
unitaria
Es la integral de la función
escalón unitario.



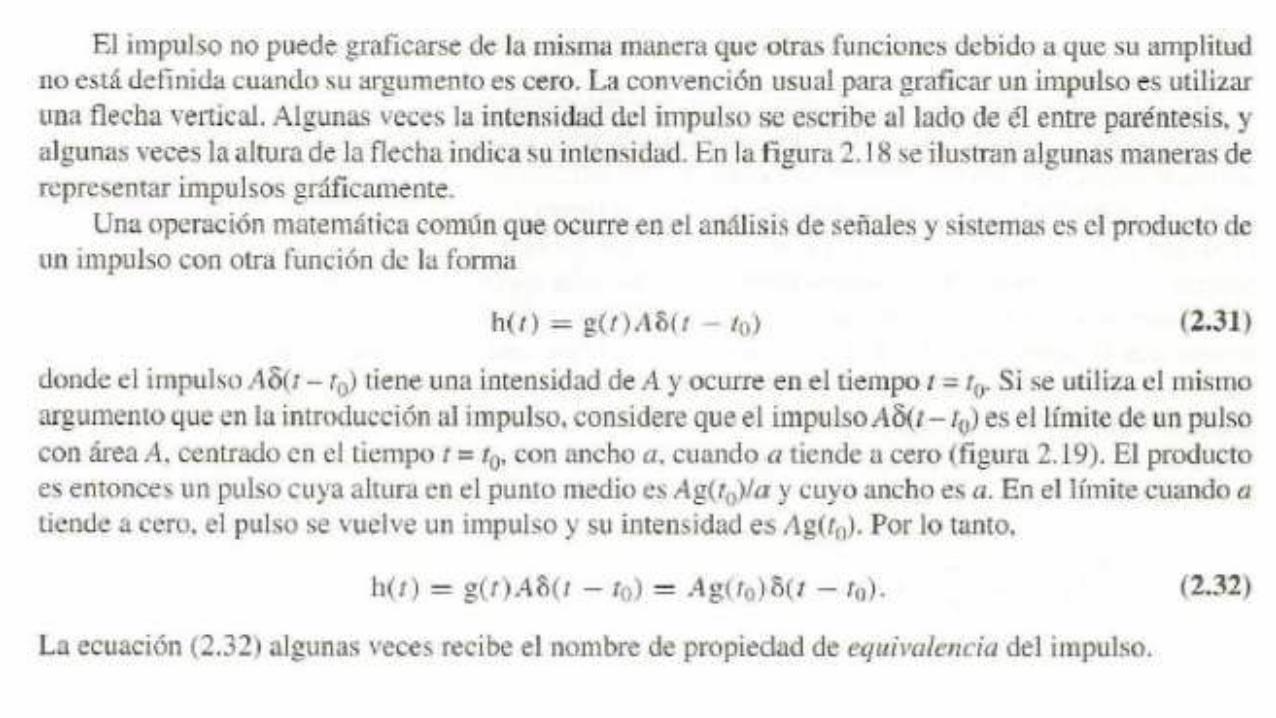
El impulso unitario
Es la derivada
generalizada del escalón
unitario.





LENIN







LENIN



OBSERVACIONES
“La pendiente en color azul”

La combunitaria
Es una secuencia de impulsos
unitarios uniformemente
espaciados

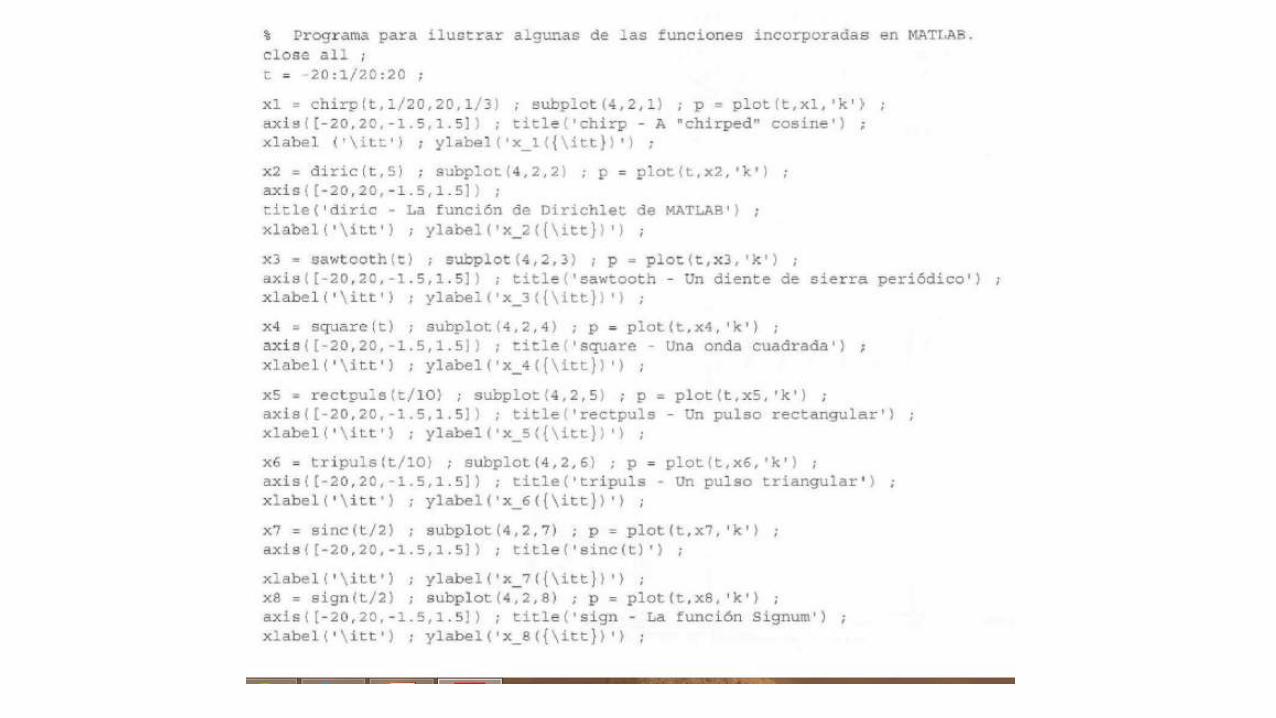
Funciones singulares



La función rectángulo
unitario


La función triángulo unitario

La función sinc unitaria




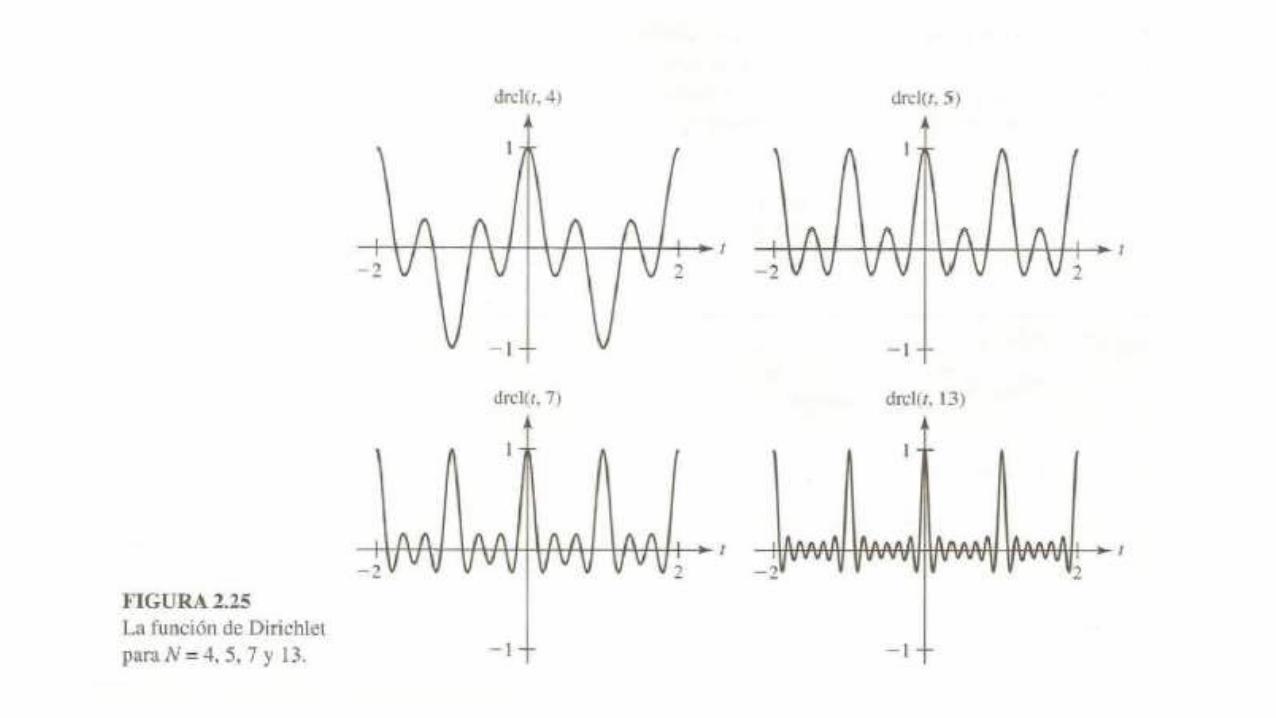
La función de Dirichlet


2.4 FUNCIONES Y COMBINACIONES DE FUNCIONES


COMBINACIONES DE FUNCIONES
• En algunos casos una función matemática simple puede describir porcompleto a una señal, una , por ejemplo. Sin embargo,
para una descripción exacta. Una operaciónque permite versatilidad en la representación matemática de
es aquella que . Lascombinaciones pueden ser
.



MATLAB
• t = 0 : 1 / 1 2 0 : 6 ; x l = e x p ( - 1 ) .*sin(2O*pi*t) + e x p ( - t / 2 ) .* s i n ( 1 9 * p i * t ) ;
• B u b p l o t ( 2 , 1 , 1 ) ; p = p l o t ( t , x l , ' k ' ) ; s e t ( p , ' L i n e W i d t h ' , 2 ) ;
• x l a b e l C X i t t ' ) ; y l a b e l ('x_l ( { \ i t t } ) ' ) ;
• t = - 4 : 1 / 6 0 : 4 ; x2 - s i n C ( t ) . * C O S ( 2 O * p i * t ) ;
• s u b p l o t ( 2 , 1 , 2 ) ; p = p l o t ( t , x 2 , ' k ' ) ; s e t ( p , ' L i n e W i d t h 2 ) ;
• x l a b e l C X i t t ' ) ; ylabel (• x_2 ( ( \ i t t } ) ' ) ;
SOLUCIÓN

Transformaciones de escalamiento y
desplazamiento en tiempo continuo

Escalamiento de Amplitud
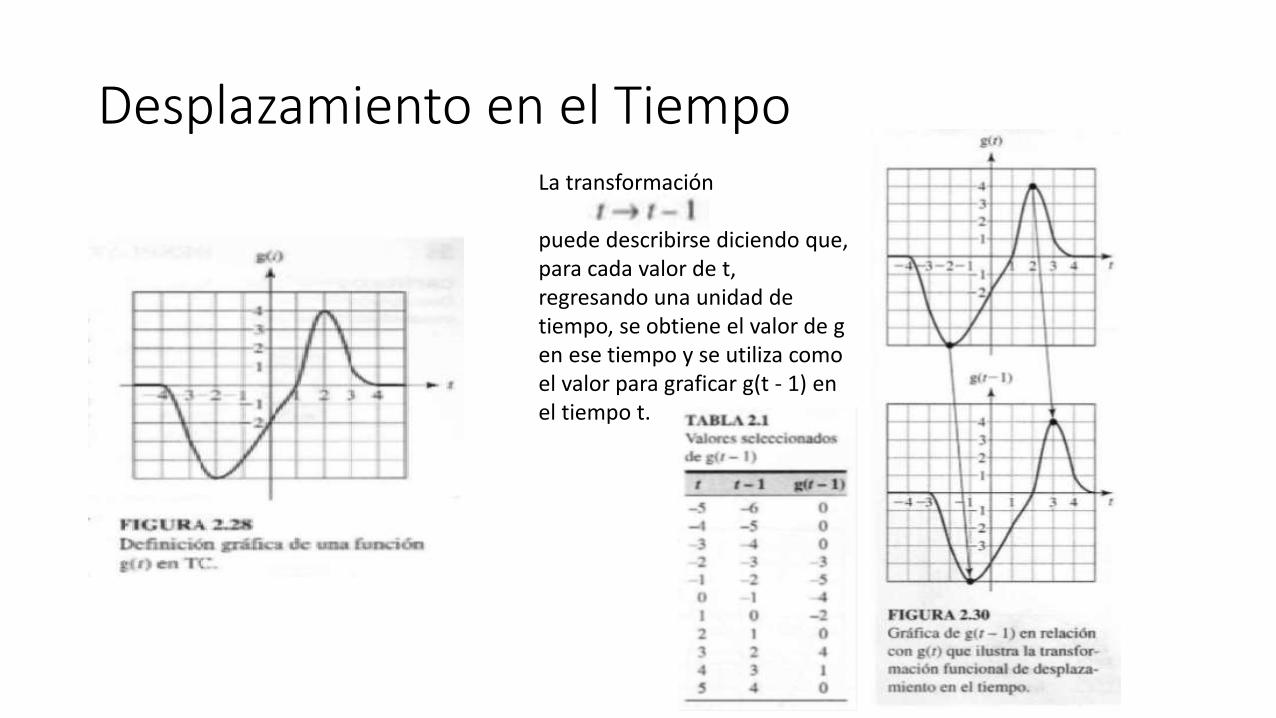
Desplazamiento en el TiempoLa transformación
puede describirse diciendo que, para cada valor de t, regresando una unidad de tiempo, se obtiene el valor de g en ese tiempo y se utiliza como el valor para graficar g(t - 1) en el tiempo t.


Ejemplos

Escalamiento en el Tiempo
Considere a continuación la transformación funcional indicada por
Como ejemplo, se calculan valores seleccionados de g(t/2).
Esta transformación expande la función g(t) horizontalmente (en t) por un factor a en g(t/a) El escalamiento en el tiempo también puede indicarse mediante la transformación t —> bt. Esto no es nuevo debido a que es lo mismo que t --> t/a con b --> 1/a.

Trasformaciones múltiples




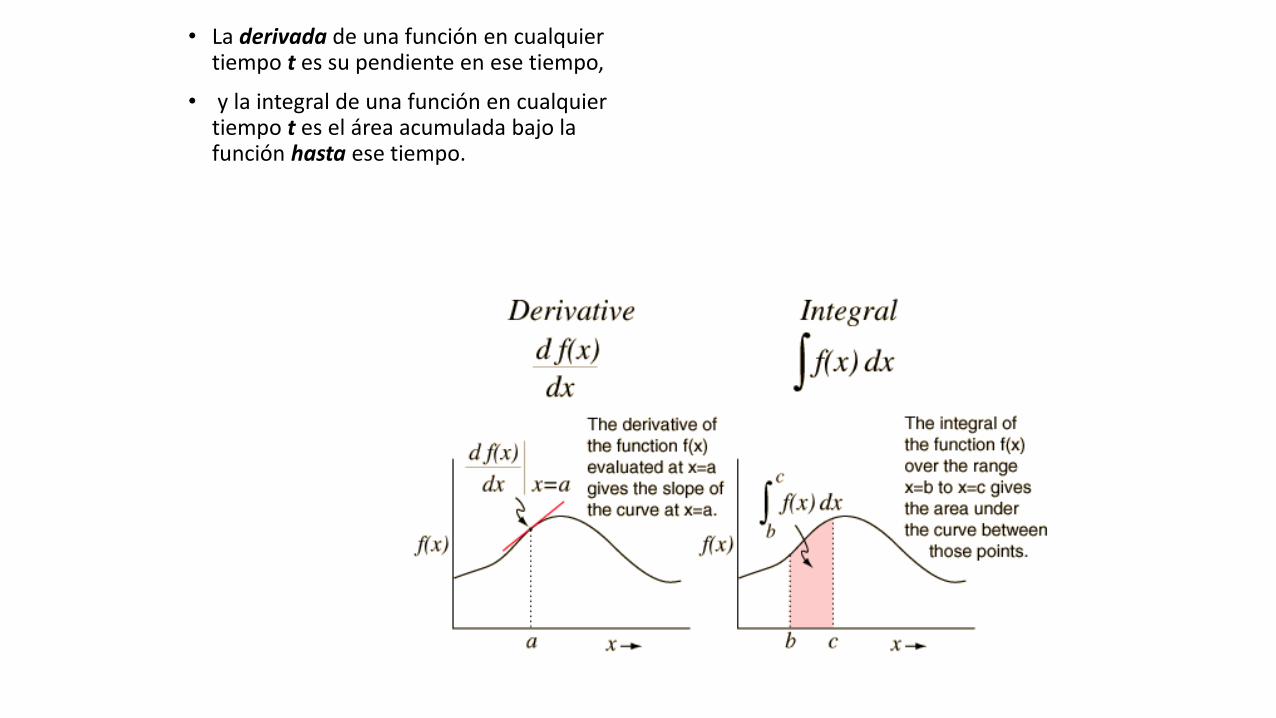
• La derivada de una función en cualquier tiempo t es su pendiente en ese tiempo,
• y la integral de una función en cualquier tiempo t es el área acumulada bajo la función hasta ese tiempo.

• Observe que los cruces por cero de todas lasderivadas se han indicado mediante líneasverticales delgadas que llevan exactamente a losmáximos y mínimos de la función correspondiente,puntos en los cuales la pendiente de la función escero.




• Algunas funciones tienen la propiedad de que al experimentar cierto tipo de transformaciones no cambian en realidad. Se dice que son invariantes bajo esa transformación.
• Una función par es aquella que es invariante bajo la transformación y una función impar es aquella que es invariante bajo la transformación

• PAR = ESPEJO
• IMPAR = NEGATIVO EJE ESPEJO



Suma de pares

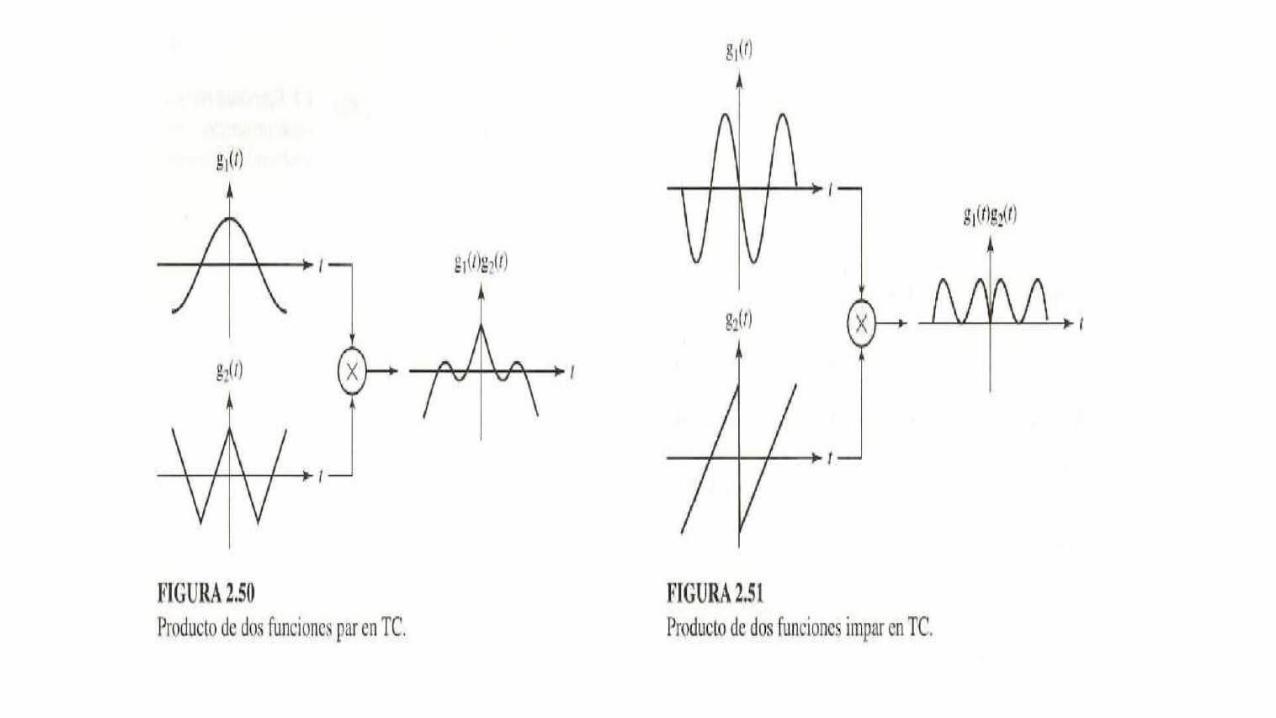
Multiplicación de pares
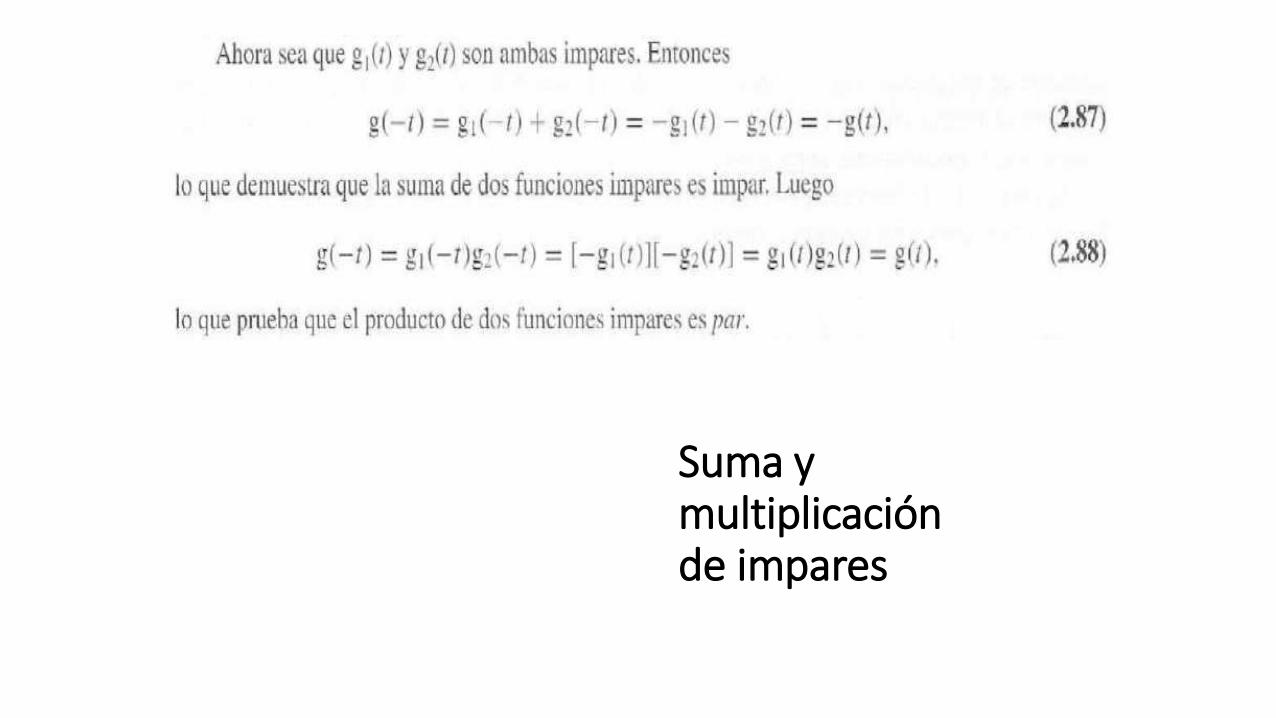
Suma y multiplicación de impares

• Si dos funciones son pares, su suma y su producto será par.
• Si dos funciones son impares, su suma es impar pero su multiplicación será par.
• COS PAR
• SEN IMPAR
De tal modo que la derivada de cualquier función par es una función impar. Demanera similar, la derivada de cualquier función impar es una función par
• Es posible recurrir a los mismos argumentospara afirmar que la integral de cualquierfunción par es una función impar más unaconstante de integración, y que la integral decualquier función impar es una función par.más una constante de integración. Esto es,salvo por una posible constante aditiva, lasintegrales de funciones par e impar son,respectivamente, impar y par.








2.8 FUNCIONES PERIÓDICAS EN TIEMPO CONTINUO





Bibliografía

