Embed Size (px)
Citation preview
UNIVERZITET U BEOGRADU
ELEKTROTEHNIKI FAKULTET
DIPLOMSKI RAD
ANALIZA OSTVARIVIH VREDNOSTI KRUTOSTI ELEKTRINE OSOVINE U
REALNIM SERVOSISTEMIMA Kandidat: Mentor: Vladimir Miloševi 379/98 prof. Slobodan N. Vukosavi

2
Sadržaj: 1. Uvod ................................................................................................................. 3 2. Primena sistema sa elektrinom osovinom ………………………………...... 4 3. Struktura sistema sa elektrinom osovinom ……………………………......... 7 3.1. Funkcija prenosa sistema sa elektrinom osovinom ………………… 10 3.2. Rad sistema sa elektrinom osovinom u stacionarnom stanju ………. 15 4. Modelovanje sistema sa elektrinom osovinom u SIMULINK-u ………........ 17 4.1. Komponente brzinskog servomehanizma sa elektrinom osovinom ... 19 4.2. Mehaniki podsistem ………………………………………………... 22 4.2.1 Modelovanje mehanikog podsistema u SIMULINK-u ….. 22 4.3. Elektrini podsistem …………………………………………………. 25 4.3.1 Modelovanje elektrinog podsistema u SIMULINK-u ...…. 25 4.4. Senzor za oitavanje pozicije – enkoder ..…………………………… 27 4.4.1. Modelovanje optikog enkodera u SIMULINK-u ………... 27 4.5. Blok za merenje brzine ……………………………………………… 29 4.5.1. Modelovanje bloka za merenje brzine u SIMULINK-u …... 29 4.6. Elektrina osovina …………………………………………………. 31 4.6.1. Izbor parametara elektrine osovine ………………………. 32 4.6.2. Modelovanje elektrine osovine u SIMULINK-u ………… 32 4.7. Regulator brzine ……………………………………………………... 34 4.7.1. Izbor upravljake strukture regulatora brzine …………….. 34 4.7.2. Modelovanje digitalnog regulatora brzine u SIMULINK-u . 39 4.8. Podešavanje parametara regulacije ………………………………...... 40 4.9. Blok za merenja ……………………………………………………... 46 4.10. Prikaz kompletnog SIMULINK modela sistema sa elektrinom
osovinom …………………………………………………………...... 47 5. Rezultati simulitanja modela ………………………………………………… 48 5.1. Ispitivanje korisnog opsega krutosti elektrine osovine u zavisnosti od
rezolucije enkodera ………………………………………………….. 51 5.2. Podešavanje koeficijenata elektrine osovine ……………………….. 58 6. Zakljuak …………………………………………………………………….. 61 Dodatak: Listing komandnih fajlova start.m i test.m …………………………... 62
3
1. Uvod U ovom radu su izložene teorijske osnove i praktina razmatranja sistema za digitalnu regulaciju brzine obrtanja dva dislocirana elektrina servopogona. Upravljake konture dva pogona su unakrsno spregnute komponentama koje su analogne efektima frikcije (viskoznog trenja) i krutosti (torzione elastinosti), koji bi postojali u sluaju da su prikljuna vratila korišenih motora mehaniki spregnuta dovoljno dugakim realnim vratilom. Umesto korišenja realnog mehanikog vratila, sprezanje servomotora se izvodi elektrinim putem (programski) – elektrinom osovinom. U radu je izneta struktura dva brzinska servosistema spregnuta elektrinom osovinom, predlaže se postupak odreivanja parametara regulacije radi postizanja željenog kvaliteta ponašanja sistema u prelaznim procesima, ispituje se ostvarivost krutosti elektrine osovine i prikazuje postupak izbora parametara elektrine osovine.
4
2. Primena sistema sa elektrinom osovinom Tokom sedamdesetih godina dvadesetog veka u robotici i industrijskoj automatici poinje masovna primena digitalno regulisanih sistema. Mehaniki satni mehanizmi su zamenjeni digitalnim raunarima, a hidraulini i pneumatski izvršni organi se menjaju digitalno regulisanim elektromotornim pogonima – servosistemima.
Pre pojave odgovarajuih digitalnih mikrokontrolera servosistemi su se
zasnivali na motorima jednosmerne struje i analognim regulatorima sa operacionim pojaavaima. Ovakvi servosistemi su imali bolje performanse nego ekvivalentni hidraulini i pneumatski izvršni organi, ali su imali i niz mana: rad u oblasti malih brzina je bio otežan zbog ofseta operacionih pojaavaa i šuma koji nastaje usled klizanja etkica preko kolektorskih kriški jednosmernog motora; pasivne kompenente su podložne starenju i uticaju temperaturnih varijacija okoline, što menja njihove karakteristike, a samim tim i parametre regulacije.
Osim što je rešila praktino sve ove probleme, digitalna tehnologija je donela i niz novih mogunosti: digitalni mikrokontroleri su omoguili implementaciju nelinearnih zakona upravljanja, brzu i jednostavnu promenu parametara regulacije, kao i implementaciju digitalnih FIR i notch filtara, potrebnih kod sistema sa spregnutim masama, sa karakteristikama koje nisu mogue u analognim implementacijama.
. Danas se svako kretanje u robotici i industrijskoj automatizaciji naješe
ostvaruje korišenjem servomotora. Svako kretanje alata, predmeta obrade ili robota se odvija prema željenim, unapred odreenim, trajektorijama brzine i pozicije, i to po nekoliko osa (stepeni slobode). Istovremeno praenje zadatih trajektorija po svakoj osi obezbeuje željeno koordinisano kretanje mehanike strukture.
Kretanje tela po jednoj osi se obino ostvaruje korišenjem jednog servomotora. Meutim, primena jednog servomotora podrazumeva da na posmatranom telu postoji samo jedna napadna taka u kojoj deluje sila koja nastoji da ga uspori ili ubrza.
Ova injenica ne predstavlja nikakav problem kada dimenzije i težina tela ne igraju nikakvu ulogu. Meutim kada je telo velikih dimenzija i težine, ak i kada je napravljeno iz jednog komada od jednog te istog materijala, to nije sluaj. Tada izmeu udaljenih delova tela postoji sprega koja ima konanu krutost, pa delovanje sile u samo jednoj taki dovodi do elastine deformacije samog tela. Ove deformacije mogu biti neprihvatljivo velike, tj. mogu predstavljati problem u tanosti pozicioniranja udaljenih delova tela ije se kretanje ostvaruje, a u ekstremnim sluajevima mogu da dovedu do zaglavljivanja ili loma celokupne strukture.
Tipini primeri su: portali, vrata, sistemi za prihvatanje i pomeranje veoma velikih predmeta obrade kao što su: veliki komadi lima, karoserije automobila, autobusa i kamiona, drvene, metalne i nemetalne ploe u industriji itd. U ovim sluajevima se kretanje po jednoj osi ostvaruje korišenjem dva ili više servomotora.
Kao primer, može da se posmatra problem upravljanja tzv. Kartezijanskim
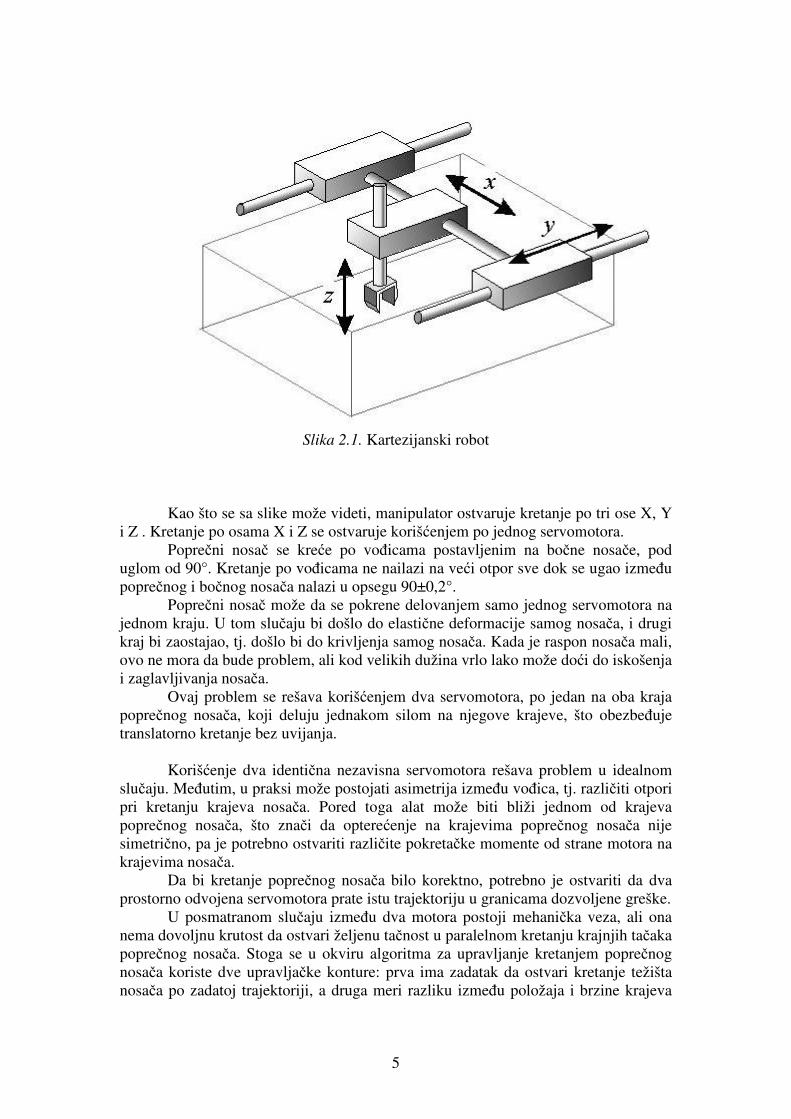
robotom, ija je struktura prikazana na slici 2.1.
5
Slika 2.1. Kartezijanski robot
Kao što se sa slike može videti, manipulator ostvaruje kretanje po tri ose X, Y i Z . Kretanje po osama X i Z se ostvaruje korišenjem po jednog servomotora. Popreni nosa se kree po voicama postavljenim na bone nosae, pod uglom od 90°. Kretanje po voicama ne nailazi na vei otpor sve dok se ugao izmeu poprenog i bonog nosaa nalazi u opsegu 90±0,2°. Popreni nosa može da se pokrene delovanjem samo jednog servomotora na jednom kraju. U tom sluaju bi došlo do elastine deformacije samog nosaa, i drugi kraj bi zaostajao, tj. došlo bi do krivljenja samog nosaa. Kada je raspon nosaa mali, ovo ne mora da bude problem, ali kod velikih dužina vrlo lako može doi do iskošenja i zaglavljivanja nosaa. Ovaj problem se rešava korišenjem dva servomotora, po jedan na oba kraja poprenog nosaa, koji deluju jednakom silom na njegove krajeve, što obezbeuje translatorno kretanje bez uvijanja. Korišenje dva identina nezavisna servomotora rešava problem u idealnom sluaju. Meutim, u praksi može postojati asimetrija izmeu voica, tj. razliiti otpori pri kretanju krajeva nosaa. Pored toga alat može biti bliži jednom od krajeva poprenog nosaa, što znai da optereenje na krajevima poprenog nosaa nije simetrino, pa je potrebno ostvariti razliite pokretake momente od strane motora na krajevima nosaa. Da bi kretanje poprenog nosaa bilo korektno, potrebno je ostvariti da dva prostorno odvojena servomotora prate istu trajektoriju u granicama dozvoljene greške.
U posmatranom sluaju izmeu dva motora postoji mehanika veza, ali ona nema dovoljnu krutost da ostvari željenu tanost u paralelnom kretanju krajnjih taaka poprenog nosaa. Stoga se u okviru algoritma za upravljanje kretanjem poprenog nosaa koriste dve upravljake konture: prva ima zadatak da ostvari kretanje težišta nosaa po zadatoj trajektoriji, a druga meri razliku izmeu položaja i brzine krajeva
6
nosaa, na osnovu nje ostvaruje potrebnu razliku u zadatim vrednostima momenta motora kako bi se deformacija poprenog nosaa održala u dozvoljenim granicama.
Na ovaj nain se napadna taka u kojoj sistem deluje na popreni nosa pomera iz jednog njegovog kraja na sredinu, tj. u težište nosaa, što je najpovoljniji nain ejstva sile na telo. Potreba za sinhronizovanim kretanjem udaljenih osa se može javiti i u sluajevima kada ne postoji mehanika sprega izmeu delova koji treba da prate istu trajektoriju. Tipini sluajevi se javljaju u fleksibilnim sistemima, robotici i upravljanju vozilima. Konvencionalno rešenje bi se sastojalo od postavljanja mehanike sprege izmeu dva dislocirana pogona, što obezbeuje jednakost brzina dva pogona, ali ne i pozicija.
Meutim, ovo rešenje ne odgovara uvek. Negde je ova veza jednostavno fiziki neizvodljiva, a u velikom broju sluajeva, zbog nedovoljno velike krutosti, razlika u pozicijama može biti neprihvatljivo velika.
Tipian primer predstavlja korišenje sprežnog mehanikog vratila. Zbog konane krutosti vratila ono se uvija, pa se pojavljuje razlika u pozicijama dva kraja. Pošto krutost vratila opada sa njegovom dužinom, ova razlika u poziciji njegovih krajeva e biti vea, što je vratilo duže. Jedno nain za popravljanje koeficijenta krutosti jeste korišenje vratila veeg poprenog preseka Meutim, na taj nain se poveava ukupna težina pokretnih delova mašine, a samim tim i potrebna snaga celokupnog pogona.
Na velikim rastojanjima mehanika sprega se ne može primeniti, jer je krutost toliko mala da su ugrožene performanse same mašine.
Funkcionalnost elektrine sprege ne zavisi od rastojanja, pa je primenom dva
nezavisno upravljana servomotora na udaljenim krajevima mašine, njihovim elektrinim sprezanjem i upravljanjem po algoritmu elektrine osovine, mogue postii isti efekat koji bi imala mehanika sprega veoma velike krutosti (naješe fiziki neizvodljive).
Struktura za upravljanje sistemom sa elektrinom osovinom se zasniva na
unakrsnom sprezanju kontura za regulaciju pozicije ili brzine dva pogona. U narednim poglavljima su izložene teorijske osnove i neka praktina
razmatranja vezana za spregnuto upravljanje brzinom dva dislocirana elektrina servopogona.
7
3. Struktura sistema sa elektrinom osovinom
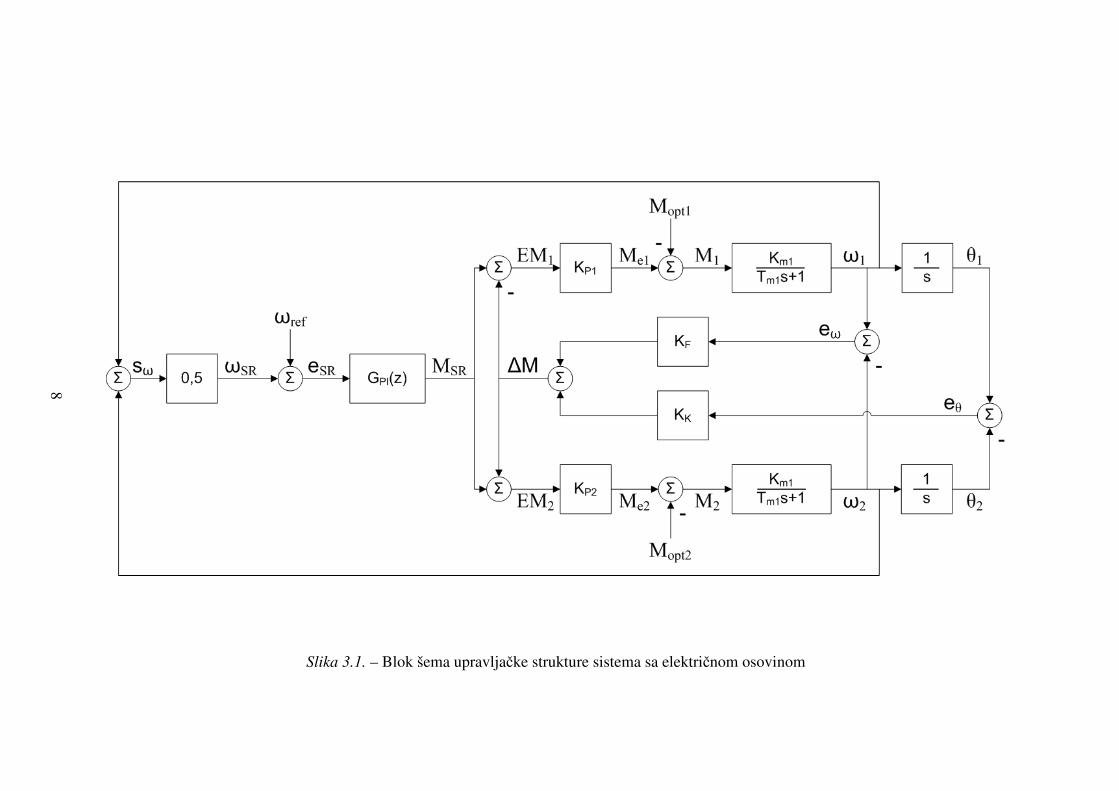
Na slici 3.1 je prikazana upravljaka struktura koja obavlja spregnuto upravljanje brzinom obrtanja dva dislocirana elektrina servopogona.
Unakrsno sprezanje u prikazanoj strukturi se izvodi komponentama koje su
analogne efektima frikcije (viskoznog trenja) i krutosti (torzione elastinosti), a koji bi postojali u sluaju da su prikljuna vratila korišenih motora mehaniki spregnuta dovoljno dugakom realnom osovinom.
Upravljaka struktura prikazana na slici 3.1 se koristi za regulaciju brzina 1ω i
2ω . Na slian nain je mogue vršiti upravljanje i pozicijama 1θ i 2θ . Potrebno je ostvariti da 1ω i 2ω u stacionarnom stanju budu meusobno
jednake i da odgovaraju zadatoj brzini refω . Na sistem deluju poremeaju u vidu poetne rezlike u pozicijama
)0()0()0( 21 θθθ −=∆ , i momenata optereenja na motorima )(1 tM opt na motoru
1M , i )(2 tM opt na motoru 2M . Ova dva momenta optereenja nisu identina, pa predstavljaju razliit teret na motorima i osnovni razlog za neusaglašeno kretanje dva motora.
Pored toga, neusaglašeno kretanje može da potie i od razliitih karakteristika optereenja prikljienih na izlazna vratila dva motora ( 1MK , 1MT i 2MK , 2MT ), kao i od razliitih vrednosti pojaanja servopojaavaa ( 1PK i 2PK ).
PI regulator, koji je zajedniki za oba servopogona i predstavljen je na slici
3.1. sa )(zGPI , ima zadatak da održava srednju vrednost brzina motora 1M i 2M na zadatoj vrednosti refω .
Regulator generiše srednju vrednost zadatog momenta SRM . U sluaju idealne simetrije dva pogona, oba motora bi imala isti pokretaki moment SRM . Pošto u sistemu ne postoji idealna simetrija, da bi dobili zadate signale momenta dva motora, zadatu srednju vrednost momenta SRM treba modifikovati signalom diferencijalnog momenta M∆ .
Signal diferencijalnog momenta izraunavamo, tako što simuliramo postojanje osovine izmeu izlaznih vratila dva motora. Ovaj signal treba da bude jednak momentu torzije koji bi se pojavio u ovakvoj osovini.
Osovina se simulira tako što se programski izraunavaju efekti njene frikcije i krutosti. Koeficijent frikcije je na slici ozaen sa FK , a koeficijent krutosti sa KK .
Zadata vrednost momenta motora 1M se dobija oduzimanjem signala
diferencijalnog momenta ( M∆ ) od signala srednje vrednosti momenta ( SRM ), dok se zadata vrednost momenta motora 2M dobija sabiranjem signala momenta srednje vrednosti ( SRM ) i signala diferencijalnog momenta ( M∆ ).
8
Slika 3.1. – Blok šema upravljake strukture sistema sa elektrinom osovinom
9
Blokovi ouznaeni sa 1PK i 2PK predstavljaju servopojaavae iji je zadatak
da zadatu vrednost momenta ( 1EM , 2EM ) pretvori u realan pokretaki moment ( 1eM , 2eM )kojim vratilo servomotora deluje na sistem.
Servopojaava poseduje trofazni tranzistorski invertor sa IGBT tranzistorima, softver i hardver za merenje struje statora i pozicije vratila, digitalni modulator koji pomou PWM-a vrši linearizaciju invertora, digitalni regulator struje statora i digitalno implementirani algoritam za upravljanje momentom i fluksom servomotora za naizmeninu struju.
Naješe se primenjuje vektorsko upravljanje asinhronim motorom ili sinhronim motorom sa stalnim magnetima.
Brzina odziva koja se postiže u ovakvim servopojaavaima je naješe za 1-2 reda veliine vea od željene dinamike u regulaciji brzine i pozicije, pa se odziv momenta može smatrati trenutnim.
Za potrebe daljeg razmatranja upravljake strukture elektrine osovine, servopojaava e biti tretiran kao isto proporcionalno pojaanje. Pojaanje servopojaavaa predstavlja odnos ostvarenog i zadatog momenta.

10
3.1. Funkcija prenosa sistema sa elektrinom osovinom
U cilju dalje analize sistema, potrebno je odrediti njegovu diskretnu funkciju prenosa.
Ulaze sistema predstavljaju signal referentne brzine ( )(trefω ), i momenti
optereenja na izlaznim vratilima motora 1M i 2M ( )(1 tM opt i )(2 tM opt ). Od interesa je posmatrati signale razlika u brzini i poziciji dva pogona, pa se
za izlaze sistema usvajaju signali )()()( 21 ttte ωωω −= i )()()( 21 ttte θθθ −= . Da bi odredili diskretnu funkciju prenosa sistema sa elektrinom osovinom,
potrebno je diskretizovati funkcije prenosa mehanikih podsistema motora 1M i 2M . Perioda odabiranja je oznaena sa T , a diskretizacija se obavlja metodom invarijantnog odskonog odziva, koja se zasniva na pretpostavci da je normalan odskoni odziv polaznog kontinualnog sistema identian u takama odabiranja normalnom odskonom odzivu diskretizovanog sistema:
kTtkTt s
sGLthz
zzGZkTh
=
−=
−
==
−= 1
)()(1
)()( 11 (3.1.1)
Primenom Z-transformacije na gornju relaciju dobija se:
)()()(1)(
)1()( 01 sGsGZsG
se
ZssG
ZzzG h
Ts
=
−=
−=
−− (3.1.2)
gde je )(0 sGh funkcija prenosa kola zadrške nultog reda. Blok šema navedenog postupka diskretizacije je priazana na slici 3.1.1.
Slika 3.1.1 Blok šema diskretizacije metodom invarijantnog odskonog odziva U pogledu korišenja D/A konvertora kao kola zadrške i primene digitalnog
raunara za realizaciju diskretne funkcije prenosa, ovaj metod je najprihvatljiviji za korišenje. Imajui sve ovo u vidu, funkcija prenosa mehanikog podsistema motora 1M može da se diskretizuje na sledei nain:
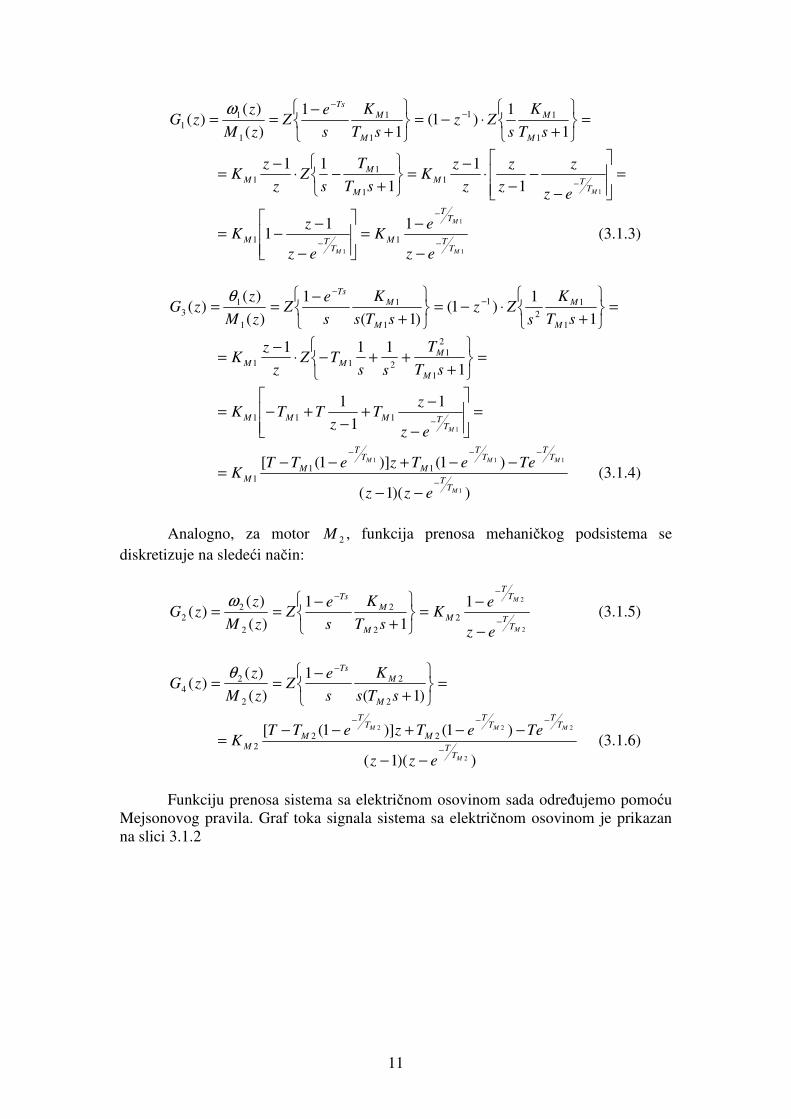
11
=
+⋅−=
+−== −
−
11
)1(1
1)()(
)(1
11
1
1
1
11 sT
Ks
ZzsT
Kse
ZzMz
zGM
M
M
MTsω
=
−−
−⋅−=
+−⋅−=
−11
11
111
1
11
MTTM
M
MM
ez
zz
zz
zK
sTT
sZ
zz
K
1
1
1
111 11
M
M
M TT
TT
MT
TM
ez
eK
ez
zK
−
−
−−
−=
−
−−= (3.1.3)
=
+⋅−=
+−== −
−
11
)1()1(
1)()(
)(1
12
1
1
1
1
13 sT
Ks
ZzsTs
Kse
ZzMz
zGM
M
M
MTsθ
=
+++−⋅−=
1111
1
21
211 sTT
ssTZ
zz
KM
MMM
=
−
−+−
+−=−
1
11
1111
MTTMMM
ez
zT
zTTK
))(1(
)1()]1([
1
11111
1M
MMM
TT
TT
TT
MT
T
MM
ezz
TeeTzeTTK
−
−−−
−−
−−+−−= (3.1.4)
Analogno, za motor 2M , funkcija prenosa mehanikog podsistema se
diskretizuje na sledei nain:
2
211
1)()(
)( 22
2
2
22
M
M
TT
TT
MM
MTs
ez
eK
sTK
se
ZzMz
zG−
−−
−
−=
+−==
ω (3.1.5)
=
+−==
−
)1(1
)()(
)(2
2
2
24 sTs
Kse
ZzMz
zGM
MTsθ
))(1(
)1()]1([
2
22222
2M
MMM
TT
TT
TT
MT
T
MM
ezz
TeeTzeTTK
−
−−−
−−
−−+−−= (3.1.6)
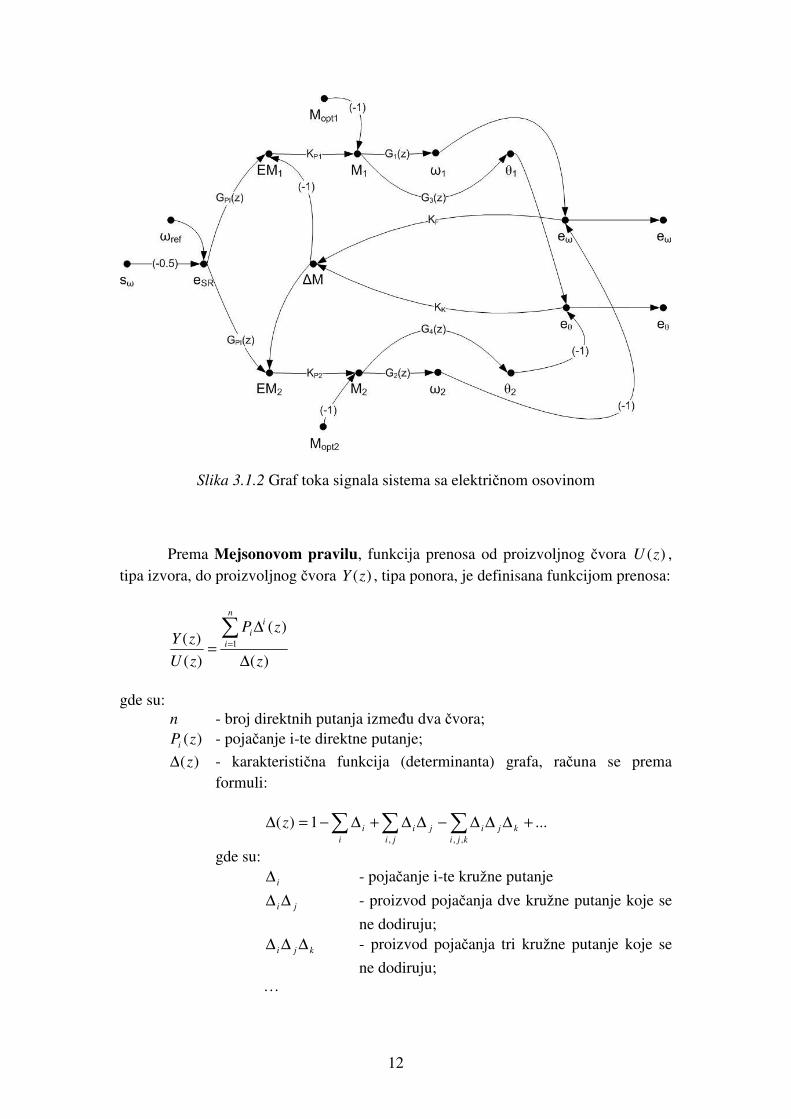
Funkciju prenosa sistema sa elektrinom osovinom sada odreujemo pomou
Mejsonovog pravila. Graf toka signala sistema sa elektrinom osovinom je prikazan na slici 3.1.2
12
Slika 3.1.2 Graf toka signala sistema sa elektrinom osovinom Prema Mejsonovom pravilu, funkcija prenosa od proizvoljnog vora )(zU ,
tipa izvora, do proizvoljnog vora )(zY , tipa ponora, je definisana funkcijom prenosa:
)(
)(
)()( 1
z
zP
zUzY
n
i
ii
∆
∆=
=
gde su: n - broj direktnih putanja izmeu dva vora;
)(zPi - pojaanje i-te direktne putanje; )(z∆ - karakteristina funkcija (determinanta) grafa, rauna se prema
formuli:
...1)(,,,
+∆∆∆−∆∆+∆−=∆ kjkji
ijji
ii
iz
gde su: i∆ - pojaanje i-te kružne putanje
ji ∆∆ - proizvod pojaanja dve kružne putanje koje se ne dodiruju;
kji ∆∆∆ - proizvod pojaanja tri kružne putanje koje se ne dodiruju;
…

13
)(zi∆ - subdeterminanta grafa koja odgovara i-toj kružnoj putanji, odreuje se prema istoj formuli kao i )(z∆ , s tim što se iz razmatranja izuzimaju one kružne putanje koje dodiruju i-tu direktnu putanju.
Na grafu toka signala sistema sa elektrinom osovinom (slika 3.1.2) mogu se
uoiti: - 10 kružnih putanja; - 4 direktne putanje od refω do ωe ;
- 4 direktne putanje od refω do θe ;
- 3 direktne putanje od 1optM do ωe ;
- 3 direktne putanje od 1optM do θe ;
- 3 direktne putanje od 2optM do ωe ;
- 3 direktne putanje od 2optM do θe . Korišenjem Mejsonovog pravila mogu se odrediti funkcije prenosa sistema sa elektrinom osovinom:
+−
= )()(
)()()()( 2211 z
zFzGKzGK
zGzE refPP
PI ωω
−
+++ )(
)(
)()()(21
1)(*
1
422211
zMzF
KzGKzGzGKzGK
opt
KPPIPP
)()(
)()()(21
1)(*
2
311122
zMzF
KzGKzGzGKzGK
opt
KPPIPP
++− (3.1.7)
+−
= )()(
)()()()( 4231 z
zFzGKzGK
zGzE refPP
PI ωθ
−
++ )(
)(
)()(21
1)(*
1
2231
zMzF
zGzGKzGK
opt
PIPP
)()(
)()(21
1)(*
2
1142
zMzF
zGzGKzGK
opt
PIPP
+− (3.1.8)
gde su:
)(*
1 zM opt , )(*2 zM opt - kompleksni likovi momenata optereenja koja deluju
na vratila motora 1M i 2M respektivno;
)(1 zG , )(2 zG , )(3 zG , )(4 zG - funkcije prenosa date jednainama (3.1.3) – (3.1.6);
14
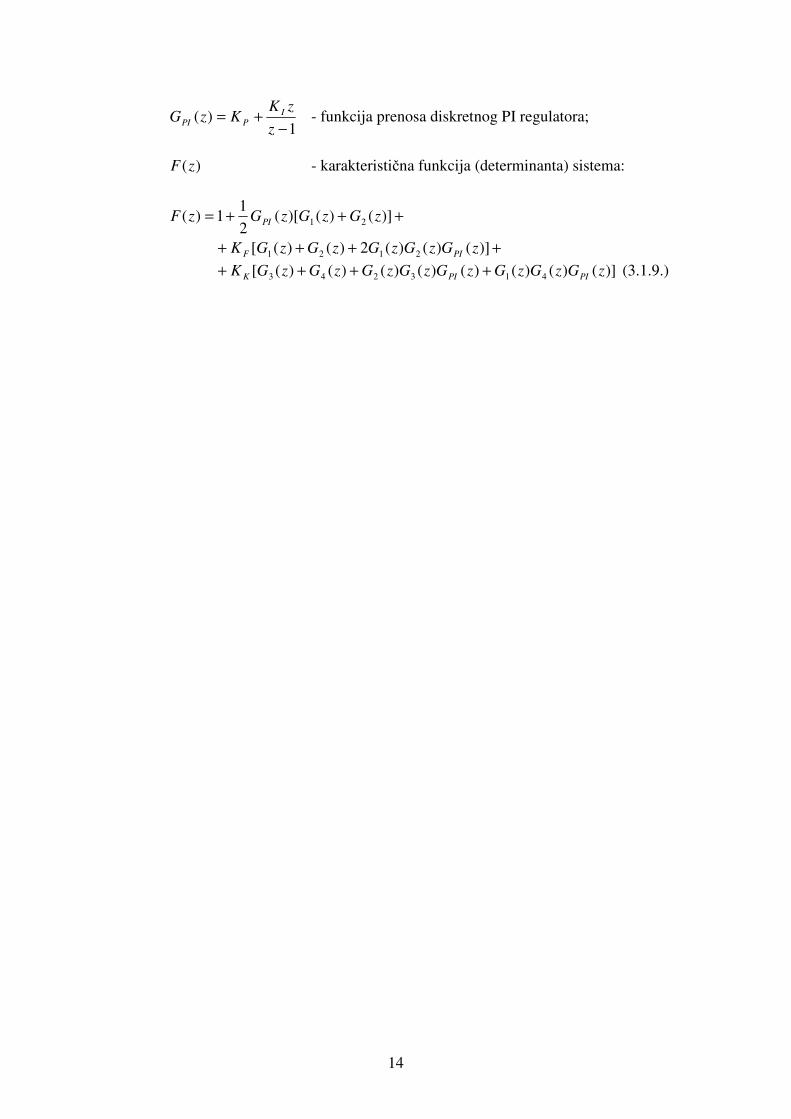
1)(
−+=
zzK
KzG IPPI - funkcija prenosa diskretnog PI regulatora;
)(zF - karakteristina funkcija (determinanta) sistema:
+++= )]()()[(21
1)( 21 zGzGzGzF PI
++++ )]()()(2)()([ 2121 zGzGzGzGzGK PIF )]()()()()()()()([ 413243 zGzGzGzGzGzGzGzGK PIPIK ++++ (3.1.9.)

15
3.2. Rad sistema sa elektrinom osovinom u stacionarnom stanju
Da bi odredili ponašanje sistema u stacionarnom stanju ( ∞→t ), pretpostaviemo da je od trenutka 0=t referenca sistema ( refω ) konstantnana i da na
sistem deluju konstantni poremeaji ( 1optM i 2optM ), tj.
11)()()( −−
Ω=Ω=
zztht ref
refrefref ωω (3.2.1)
1
101101 1
)()()( −−==
z
MzMthMtM opt
optoptopt (3.2.2)
1
202202 1
)()()( −−==
z
MzMthMtM opt
optoptopt (3.2.3)
Razliku u brzinama obrtanja u stacionarno stanju izraunavamo pomou druge
granine teoreme Z-transformacije:
=−==∞ −
→∞→)()1(lim)(lim)( 1
1zEzkTee
zk ωωω
+−
−= −
→)(
)()()(
)()1(lim 22111
1z
zFzGKzGK
zGz refPP
PIzω
−
+++ )(
)(
)()()(21
1)(*
1
422211
zMzF
KzGKzGzGKzGK
opt
KPPIPP
=
++− )(
)(
)()()(21
1)(*
2
311122
zMzF
KzGKzGzGKzGK
opt
KPPIPP
0= (3.2.4)
Brzine obrtanja dva motora u stacionarnom stanju e biti iste, kao što bi bile
iste i u sluaju sprezanja realnim vratilom Greška pozicije izlaznih vratila dva motora u stacionarnom stanju se rauna na
isti nain.
=−==∞ −
→∞→)()1(lim)(lim)( 1
1zEzkTee
zk θθθ
16
+−
−= −
→)(
)()()(
)()1(lim 42311
1z
zFzGKzGK
zGz refPP
PIzω
−
++ )(
)(
)()(21
1)(*
1
2231
zMzF
zGzGKzGK
opt
PIPP
=
+− )(
)(
)()(21
1)(*
2
1142
zMzF
zGzGKzGK
opt
PIPP
K
optopt
K
ref
MPMP K
MM
KKKKK 2
)(
211 2010
1122
−+
Ω
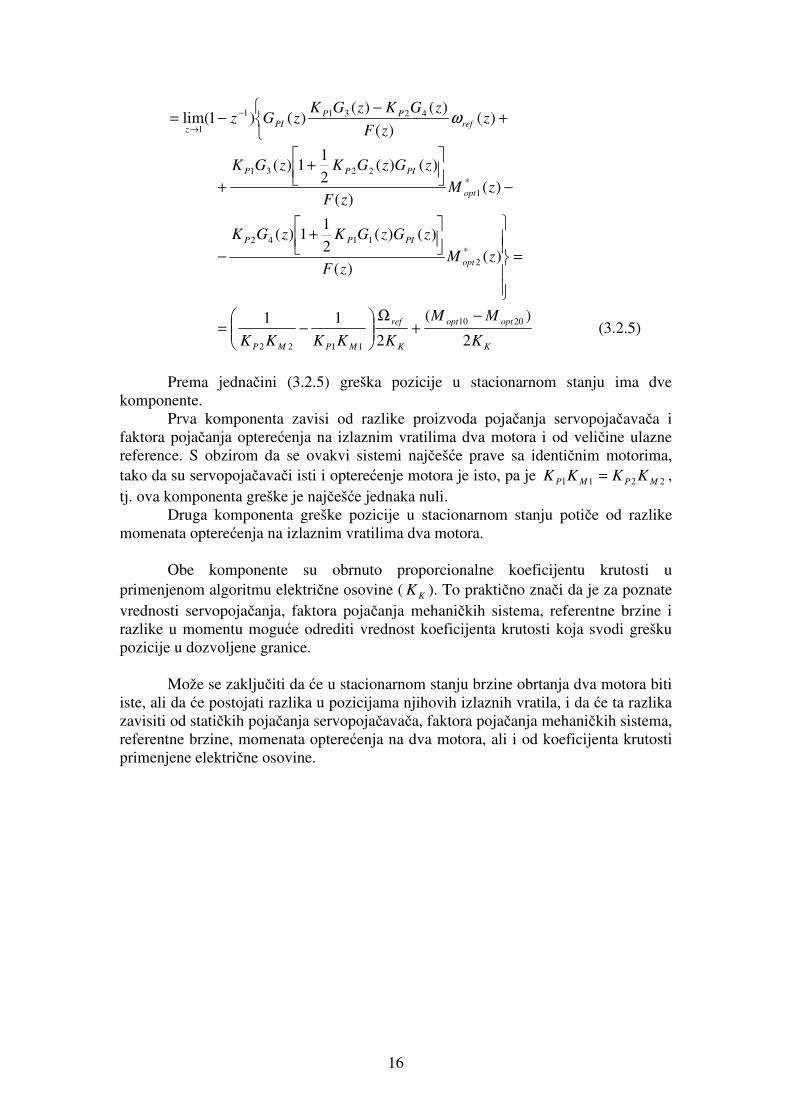
−= (3.2.5)
Prema jednaini (3.2.5) greška pozicije u stacionarnom stanju ima dve
komponente. Prva komponenta zavisi od razlike proizvoda pojaanja servopojaavaa i
faktora pojaanja optereenja na izlaznim vratilima dva motora i od veliine ulazne reference. S obzirom da se ovakvi sistemi naješe prave sa identinim motorima, tako da su servopojaavai isti i optereenje motora je isto, pa je 2211 MPMP KKKK = , tj. ova komponenta greške je naješe jednaka nuli.
Druga komponenta greške pozicije u stacionarnom stanju potie od razlike momenata optereenja na izlaznim vratilima dva motora.
Obe komponente su obrnuto proporcionalne koeficijentu krutosti u
primenjenom algoritmu elektrine osovine ( KK ). To praktino znai da je za poznate vrednosti servopojaanja, faktora pojaanja mehanikih sistema, referentne brzine i razlike u momentu mogue odrediti vrednost koeficijenta krutosti koja svodi grešku pozicije u dozvoljene granice.
Može se zakljuiti da e u stacionarnom stanju brzine obrtanja dva motora biti
iste, ali da e postojati razlika u pozicijama njihovih izlaznih vratila, i da e ta razlika zavisiti od statikih pojaanja servopojaavaa, faktora pojaanja mehanikih sistema, referentne brzine, momenata optereenja na dva motora, ali i od koeficijenta krutosti primenjene elektrine osovine.
17
4. Modelovanje sistema sa elektrinom osovinom u SIMULINK-u
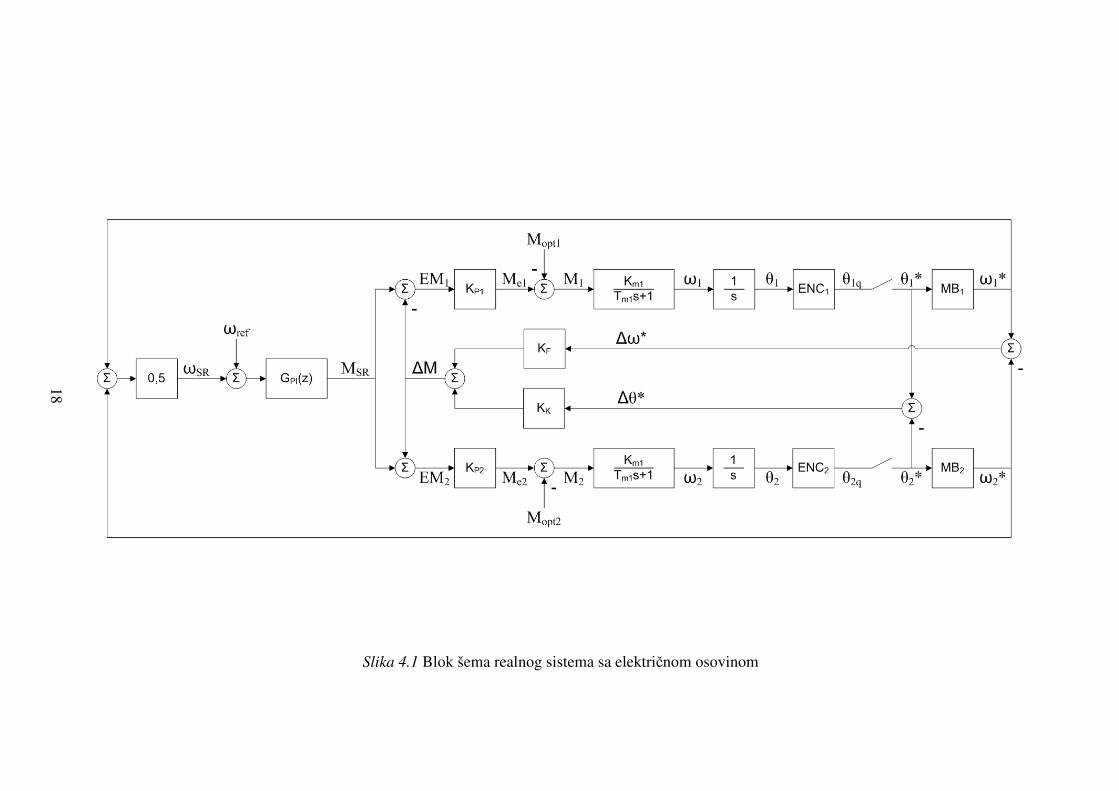
Na slici 3.1 prikazana je struktura za upravljanje sistemom sa elektrinom osovinom. Na toj slici se podrazumeva da je oitavanje brzine i pozicije dva motora idealno, što u realnim sistemima nije mogue. U praksi se za oitavanje pozicije koriste enkoderi. enkoderi imaju konanu rezoluciju (obino 10-12 bita), pa e pri oitavanju pozicije dolaziti do greške kvantizacije. Brzina obrtanja se neoitava dirktno, ve se procenjuje u samom mikrokontroleru na osnovu razlike u oitanim pozicijama u dva razliita trenutka odabiranja.
Ovako dobijeni podaci za brzinu i poziciju se koriste u simulatoru osovine.. U ovom poglavlju e biti detaljno opisan SIMULINK model sistema sa elektrinom osovinom, koji uzima u obzir nesavršenosti senzora za oitavanje pozicije (enkodera). Najpre e biti objašnjeno modelovanje svih delova sistema pojedinano, a potom e biti prikazan i model u celosti.
18
Slika 4.1 Blok šema realnog sistema sa elektrinom osovinom

19
4.1. Komponente brzinskog servomehanizma sa elektrinom osovinom
Zadatak brzinskog servomehanizma sa simulacijom elektrine osovine jeste da obezbedi kvalitetnu regulaciju brzine dva nezavisno pogonjena servomotora. Brzine dva motora moraju da budu jednake meusobno iste i jednake zadatoj brzini refω .
Zahteva se da upravljanje brzinom dva motora bude kvalitetno u svim radnim režimima, tj. da u poseduje željeni karakter u prelaznom režimu, veliku tanost u ustaljenom stanju i malu osetljivost na dejstvo poremeaja. Strukturni blok dijagram ovakvog jednog sistema je prikazana na slici 4.1.1. i ine ga:
- Mehaniki podsistem 1: motor 1M vezan idealnom spojnicom sa optereenjem;
- Mehaniki podsistem 2: motor 2M vezan idealnom spojnicom sa optereenjem;
- Elektrini podsistem 1: pogonski pretvara 1P i motor 1M kao aktuator elektromagnetnog momenta;
- Elektrini podsistem 2: pogonski pretvara 2P i motor 2M kao aktuator elektromagnetnog momenta;
- Dava 1 ( 1D ): senzor za merenje položaja motora 1M ; - Dava 2 ( 2D ): senzor za merenje položaja motora 2M ; - Blok za merenje brzine motora 1 ( 1MB ); - Blok za merenje brzine motora 2 ( 1MB ); - Regulator brzine srednje vrednosti brzine dva motora ( REG ) sa
ograniavaem referentnog momenta ( GM ); - Blok za simulaciju osovine ( EO ).
Nomenklatura slike 4.1.1.:
refω - referentna brzina;
*SRM - referentna srednja vrednost momenta koju daje regulator;
1EM - izlazni moment motora M1;
2EM - izlazni moment motora M2; 1optM - moment optereenja na prikljunom vratilu motora M1;
1optM - moment optereenja na prikljunom vratilu motora M2;
1θ - položaj izlaznog vratila motora M1;
2θ - položaj izlaznog vratila motora M2;
1ω - ugaona brzina obrtanja vratila motora M1;
1ω - ugaona brzina obrtanja vratila motora M2; M∆ - diferencijalni moment na izlazu elektrine osovine.

20
Slika 4.1.1 Strukturni blok dijagram brzinskog servomehanizma sa elektrinom osovinom
21
Regulator (REG) na svom izlazu generiše vrednost srednje vrednosti momenta *SRM koju dva motora treba da primene kako bi srednja vrednost brzine obrtanja dva
pogona odgovarala zadatoj vrednosti refω . Na pogonske pretvarae se dovodi vrednost momenta modifikovana signalom diferencijalnog momenta koji se dobija na izlazu iz simulatora elektrine osovine ( MMM SR ∆=
**2,1 ). Pogonski pretvarai ( 1P i 2P )
generišu napon na prikljunim krajevima motora ( 1M i 2M ) tako da izlazni elektromagnetni moment na svakom od motora ( 1eM i 2eM ) sledi odgovarajui zadati referentni ulaz ( 1EM i 2EM ).
Izlazni moment svakog motora se preko spojnice prenosi do optereenja, gde izaziva obrtno kretanje. Pomou davaa ( 1D i 2D ) se mere položaji izlaznih vratila motora ( 1θ i 2θ ). U blokovima za merenje brzine ( 1MB i 2MB ), ove informacije se koriste za procenu ugaonih brzine ( 1ω i 2ω ).
Ovi podaci se takoe koriste i u bloku za simulaciju elektrine osovine, i na osnovu njih se generiše signal diferencijalnog momenta M∆ .
Konano, referentni ulaz refω se poredi sa procenjenom srednjom vrednošu
brzina dva motora (2
21 ωω +), a dobijeni signal greške se vodi na ulaz regulatora
(REG) ije je zadatak da generiše referentnu srednju vrednost momenta ( *SRM ), tako da regulisana srednja vrednost dve brzine prati referentni ulaz ( refω ).
U poglavljima koja slede, izlaže se princip rada komponenti digitalno
regulisanog brzinskog servomehanizma sa elektrinom osovinom, uz osvrt na nesavršenosti koje e biti modelovane i uvažene prilikom izbora parametara regulatora brzine.
22
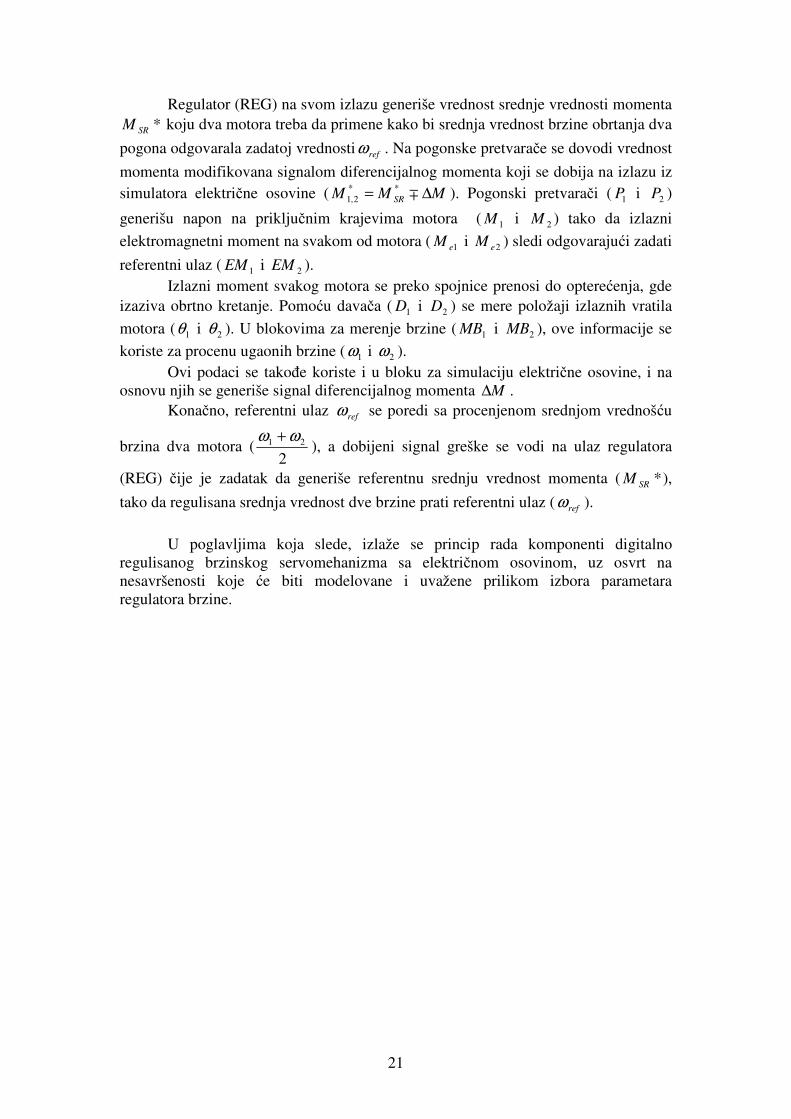
4.2. Mehaniki podsistem
Mehaniki podsistem brzinskog servomehanizma ine: – Elektrina mašina (M); – Elastina spojnica (S); – Optreenje (O).
U opštem sluaju spojnica (S) je relativno dugo vratilo konane krutosti OK , i
koeficijenta viskoznog trenja VK . U tom sluaju, mehaniki podsistem sa elastinom spojnicom ima izgled kao na sl. 4.2.1.
Slika 4.2.1.. Mehaniki podsistem sa elastinom spojnicom.
Nomenklatura slike 4.2.1.:
mm FJ , - moment inercije i frikcija elektrine mašine;
mm θω , - ugaona brzina obrtanja i pozicija vratila na strani elektrine mašine;
OM - moment uvijanja vratila;
optopt θω , - ugaona brzina obrtanja i pozicija vratila na strani optereenja;
optopt FJ , - moment inercije i frikcija optereenja;
optM - moment optereenja.
OK - koeficijent krutosti vratila;
VK - koeficijent viskoznog trenja. 4.2.1 Modelovanje mehanikog podsistema u SIMULINK-u
Mehaniki podsistem prikazan na sl. 4.2.1 može se opisati sledeim sistemom jednaina:
,Ommemm MFMJ −−= ωθ (4.2.1)
,OoptoptOoptopt MFMJ −−= ωθ (4.2.2)

23
)()( optmVoptmOO KKM ωωθθ −+−⋅= (4.2.3) gde su:
mm θω = i optopt θω = Za potrebe simulacije elektrine osovine smatraemo da je je vratilo izmeu
motora i optereenja dovoljno kratko da se može smatrati idealnim ( 0, =→∝ VO KK ).
U ovom sluaju je optm ωω = , pa se gornje jednaine svode na:
,)()( optmoptmemmoptm MFFMJJ −+−=+ ωθ (4.2.4) Prenosna funkcija mehanikog sistema kada je 0=OPTM se svodi na:
)1(1
1
)(+
=
+=
m
m
e
m
TsK
sFJ
s
FsMθ
(4.2.5)
gde su:
optm JJJ += - ukupna inercija elektrine mašine i optereenja;
optm FFF += - ukupno trenje elektrine mašine i optereenja;
FK m
1= - faktor pojaanja mehanikog sistema;
FJ
Tm = - mehanika vremenska konstanta.
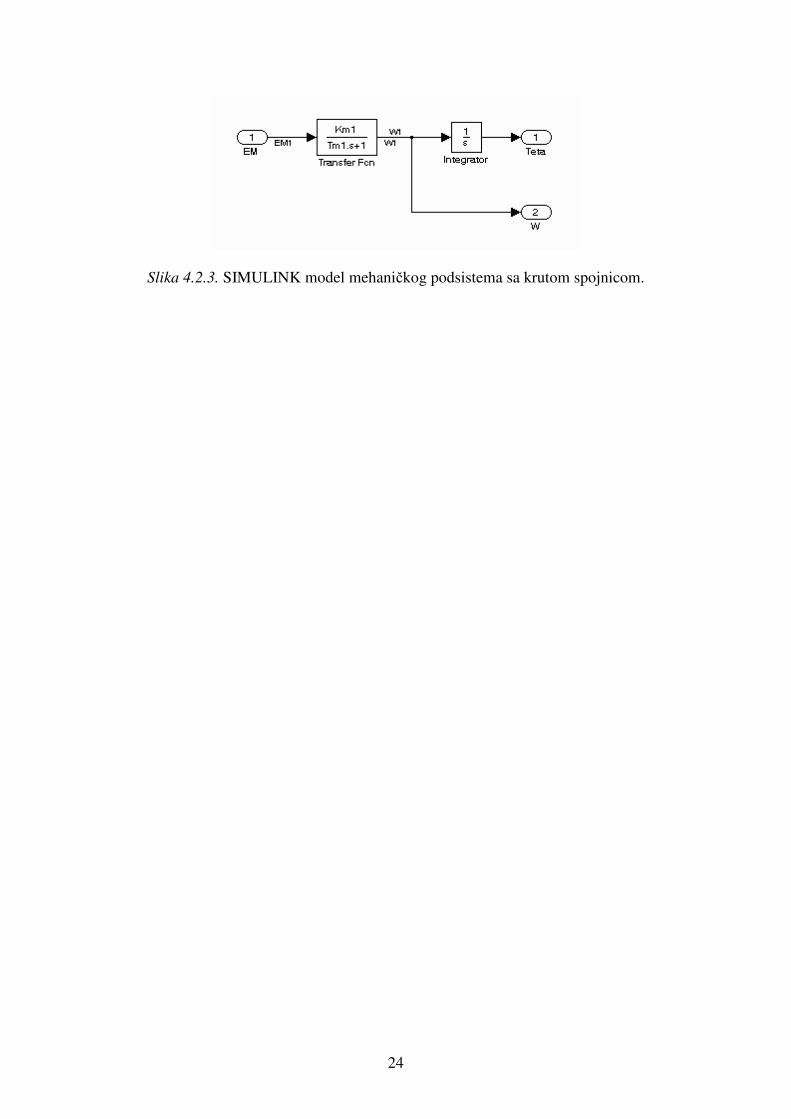
Gornjem izrazu odgovara struktura prikazana na sl.4.2.2, a njen odgovarajui
SIMULINK model je prikazan na slici 4.2.3
Slika 4.2.2. Model mehanikog podsistema sa krutom spojnicom.
24
Slika 4.2.3. SIMULINK model mehanikog podsistema sa krutom spojnicom.
25
4.3. Elektrini podsistem
Elektrini podsistem brzinskog servomehanizma sa elektrinom osovinom ine (Slika 4.1.):
– Pogonski pretvara ( 1P i 2P ); – Motor ( 1M i 2M ) kao aktuator elektromagnetnog momenta.
Pogonski pretvara generiše napon na prikljunim krajevima motora tako da
izlazni moment ( 1eM i 2eM ) sledi referentni ulaz ( 1EM i 2EM ). Svaki pogonski pretvara poseduje:
- trofazni tranzistorski invertor sa IGBT tranzistorima; - softver i hardver za merenje struje statora i pozicije vratila; - digitalni modulator koji pomou PWM-a vrši linearizaciju
invertora; - digitalni regulator struje statora i digitalno implementirani
algoritam za upravljanje momentom i fluksom servomotora za naizmeninu struju.
U pogonskim pretvaraima naješe se primenjuje vektorsko upravljanje
asinhronim motorom ili sinhronim motorom sa stalnim magnetima. Brzina odziva koja se postiže u ovakvim servopojaavaima je znatno vea (za
1-2 reda veliine) od željene dinamike u regulaciji brzine i pozicije, pa se odziv momenta može smatrati trenutnim.
Za potrebe daljeg razmatranja upravljake strukture elektrine osovine, servopojaava e biti tretiran kao isto proporcionalno pojaanje (slika 4.3.1). Pojaanje servopojaavaa predstavlja odnos ostvarenog i zadatog momenta.
Slika 4.3.1 Servopojaava modelovan kao proporcionalno pojaanje 4.3.1 Modelovanje elektrinog sistema u SIMULINK-u
Strukturi sa slike 4.3.1, odgovara SIMULINK blok Gain (slika 4.3.2).

26
Slika 4.3.2 SIMULINK model servopojaavaa
27
4.4. Senzor za oitavanje pozicije - enkoder
Kao senzor za oitavanje pozicije u sistemu naješe se koristi optiki enkoder. Postoje dve vrste enkodera: apsolutni i inkrementalni.
Kod apsolutnih optikih enkodera, položaj osovine motora se dobija
neposrednim oitavanjem kodovane pozicije sa diska. Za kodovanje se naješe koristi Grayov ili binarno ciklini kod u kome se kodovane vrednosti bilo koja dva susedna broja razlikuju samo u jednom bitu. Na ovaj nain, smanjuje se greška u detekciji ugla koja može biti najviše jedan priraštaj detektovane veliine. Detektovana vrednost se pre dovoenja u procesor mora prevesti iz binarno ciklinog u obian binarni kod.
Inkrementalni optiki enkoder opremljen je prozranim diskom na kome su
gusto naneti neprozrani ekvidistantni markeri. Za oitavanje markera koristi se svetlosni detektor. U toku obrtanja diska, svetlosni detektor generiše povorku impulsa koja služi kao takt za punjenje dvosmernog brojaa. Svakom impulsu inkrementalnog enkodera odgovara priraštaj ugla od jednog kvanta. Na taj nain, pri svakom oitavanju, u brojau se nalazi digitalni ekvivalent inkrementa pozicije. Sabiranjem sukcesivnih vrednosti brojaa dobija se digitalni ekvivalent pozicije koja se meri.
Prednosti inkrementalnog u odnosu na apsolutni optiki enkoder su brojne pa
se on po pravilu koristi kao dava u servomehanizmima visokog kvaliteta dinamikog ponašanja. Pre svega, rezolucija merenja položaj je znatno vea i ograniena je samo širinom prozirnih zazora na disku. Na dašnjem tehnološkom nivou, rezolucija merenja položaja kod veine inkrementalnih optikih enkodera iznosi 10 ili 12 bita. Takoe, impulsi koji stižu sa enkoderskih faza mogu se uz upotrebu capture-compare brojakog sistema u digitalnom kontroleru upotrebiti za realizaciju naprednih metoda merenja brzine. 4.4.1 Modelovanje optikog enkodera u SIMULINK-u
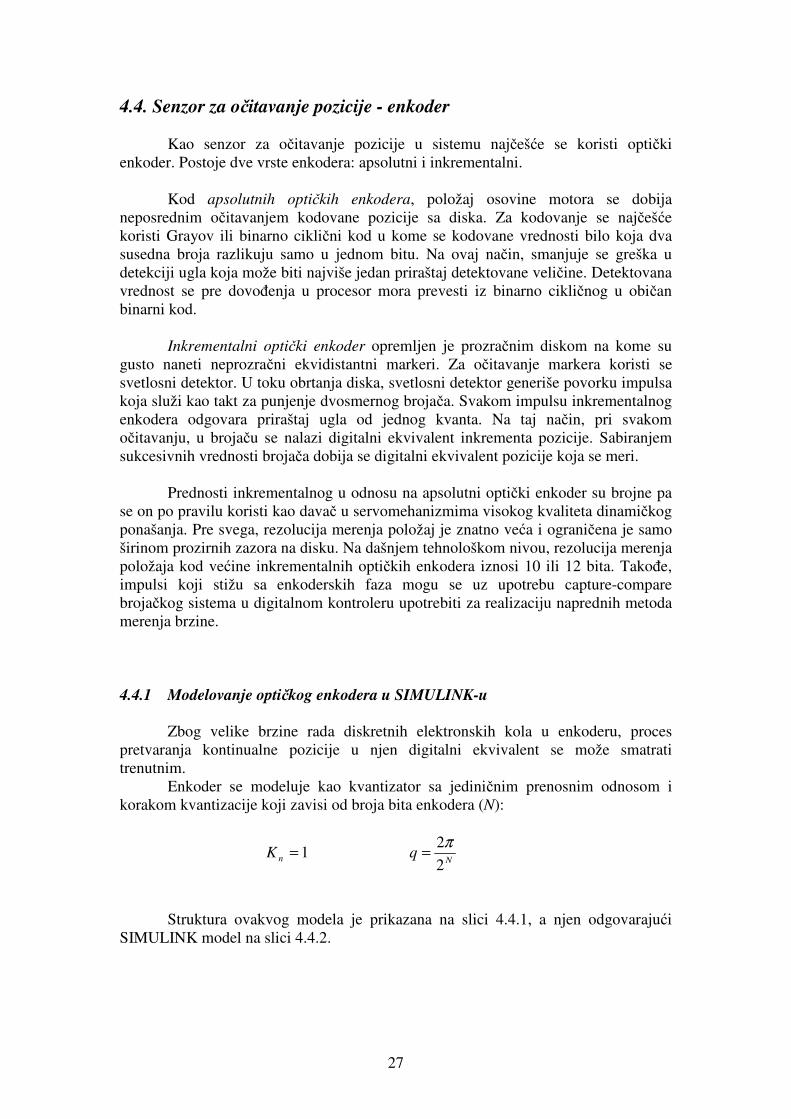
Zbog velike brzine rada diskretnih elektronskih kola u enkoderu, proces pretvaranja kontinualne pozicije u njen digitalni ekvivalent se može smatrati trenutnim.
Enkoder se modeluje kao kvantizator sa jedininim prenosnim odnosom i korakom kvantizacije koji zavisi od broja bita enkodera (N):
1=nK N
q22π=
Struktura ovakvog modela je prikazana na slici 4.4.1, a njen odgovarajui SIMULINK model na slici 4.4.2.
28
Slika 4.4.1 Model optikog enkodera.
Slika 4.4.2. SIMULINK model optikog enkodera.

29
4.5. Blok za merenje brzine
U digitalno regulisanom brzinskom servomehanizmu, informacija o brzini obrtanja vratila elektrine mašine dobija se posrednim putem. Naješe korišeni metod merenja brzine je diferenca pozicije. Pomou enkodera se meri položaj izlaznog vratila motora pa se primenom diference pozicije, u diskretnim intervalima sa periodom T, brzina odreuje kao
Tkk
k)1()(
)(−−= θθω (4.5.1)
Primenom Z-transformacije, jednaina (4.5.1) postaje:
)(1
)(1
zTz
z θω−−= (4.5.2)
Odgovarajua struktura koja odgovara izrazu (4.5.2) prikazana je na slici
4.5.1.
Slika 4.5.1 Struktura bloka za merenje brzine
Zbog visokopropusnog karaktera prvog izvoda, diferenca pozicije jako je osetljiva na kvantovanje pozicije u davau. Kao rezultat, procenjena brzina na izlazu iz bloka za merenje brzine može uzimati samo vrednosti iz skupa (n - ceo broj):
ω∆⋅= nk )( (4.5.3)
gde je n ceo broj, a ω∆ kvant brzine dat izrazom
TT Nsrad
22
][πθω =∆=∆ (4.5.4)
Kao posledica kvantovanja pozicije i brzine, u pokretakom momentu se
javljaja valovitost koja ima izrazito negativno dejstvo na performanse servo pogona. 4.5.1 Modelovanje bloka za merenje brzine u SIMULINK-u
Strukturi na slici 4.5.1 odgovara SIMULINK model prikazan na slici 4.5.2.

30
Slika 4.5.2 SIMULINK model bloka za merenje brzine
31
4.6. Elektrina osovina
Elektrina osovina služi za meusobno sprezanje regulacionih kontura dva nezavisna elektrina pogona.
Simuliranje elektrine osovine se ostvaruje simuliranjem efekata konane
krutosti i frikcije (viskoznog trenja) koji se javljaju pri korišenju realnog mehanikog vratila. Ovi efekti prouzrokuju javljanje diferencijalnog momenta, kojim vratilo teži da ujednai brzinu i poziciju dva pogona.
Ako se dva meusobno nezavisno pogonjena servomotora spregnu realnim vratilom i ukoliko izmeu pozicija ta dva pogona postoji razlika, samo vratilo e se uviti za ugao 21 θθθ −=∆ . Ovo uvijanje e dovesti do stvaranja diferencijalnog momenta kojim vratilo teži da izjednai pozicije svojih krajeva: θ∆=∆ KK KM (4.6.1)
Takoe, ukoliko postoji razlika u brzinama okretanja dva kraja vratila
21 ωωω −=∆ , nastaje diferencijalni moment srazmeran njihovoj razlici:
ω∆=∆ FF KM (4.6.2) koji teži da izjednai brzine krajeva vratila.
Superpozicijom ovih momenata, dobija se ukupan moment kojim realna osovina teži da izjednai ukupno ponašanje (brzinu i poziciju) dva servopogona:
ωθ ∆+∆=∆ FK KKM (4.6.3)
Koeficijenti KK i FK se nazivaju respektivno koeficijent krutosti i koeficijent
frikcije vratila i zavise kako od njegovih dimenzija (prenika i dužine), tako i od materijala od kojeg je ono napravljeno.
Simulacija mehanikog vratila elektrinim putem se ostvaruje tako što se
programski izraunava vrednost diferencijalnog momenta ( M∆ ) prema jednaini (4.6.3).
Ovako dobijenom vrednosti diferencijalnog momenta se modifikuje signal
srednje vrednosti momenta koji zadaje regulator, i to na sledei nain: na prvi motor se dovodi razlika momenta na izlazu iz regulatora i diferencijalog momenta, a na drugi njihov zbir.
Sav hardver potreban da bi se ostvarilo upravljanje na ovaj nain je praktino isti kao kada se motorima upravlja potpuno odvojeno. Potrebno je obezbediti da mikrokontroler (DSP) može da oitava dva senzora pozicije, i da upravlja sa dva trofazna invertorska mosta. Svi ostali zadaci: izraunavanje brzine, PI regulacija i simulacija elektrine osovine se obavljaju programski.
32
4.6.1 Izbor parametara elektrine osovine Kod upotrebe realnog vratila, njegovi koeficijenti krutosti i viskoznog trenja
su odreeni njegovim dimenzijama (dužine i debljine) i karakteristikama korišenog materijala. Korisnik praktino nema nikakvu mogunost podešavanja ovih koeficijenata.
U okviru algoritma elektrine osovine koeficijenti koji simuliraju krutost ( KK ) i viskozno trenje ( FK ) su podaci u memoriji kontrolera (DSP-a) , i mogu se slobodno podešavati prema potrebama korisnika
Teoretski, izbor ovih koeficijenata nije ogranien. U realnim sistemima ipak postoje ogranienja koja zavise od efekata konane periode odabiranja, transportnog kašnjenja i šuma kvantizacije.
Izbor ovih koeficijenata se najpre svodi na izbor koeficijenta KK prema
željenoj grešci u stacionarnom stanju (jednaina (3.5.2)). Potom se bira koeficijent FK , tako da su torzione oscilacije u dovoljnoj meri prigušene.
Naravno sve vreme treba voditi rauna da polovi spregnute funkcije sistema ne izau iz oblasti stabilnosti. 4.6.2 Modelovanje elektrine osovine u SIMULINK-u
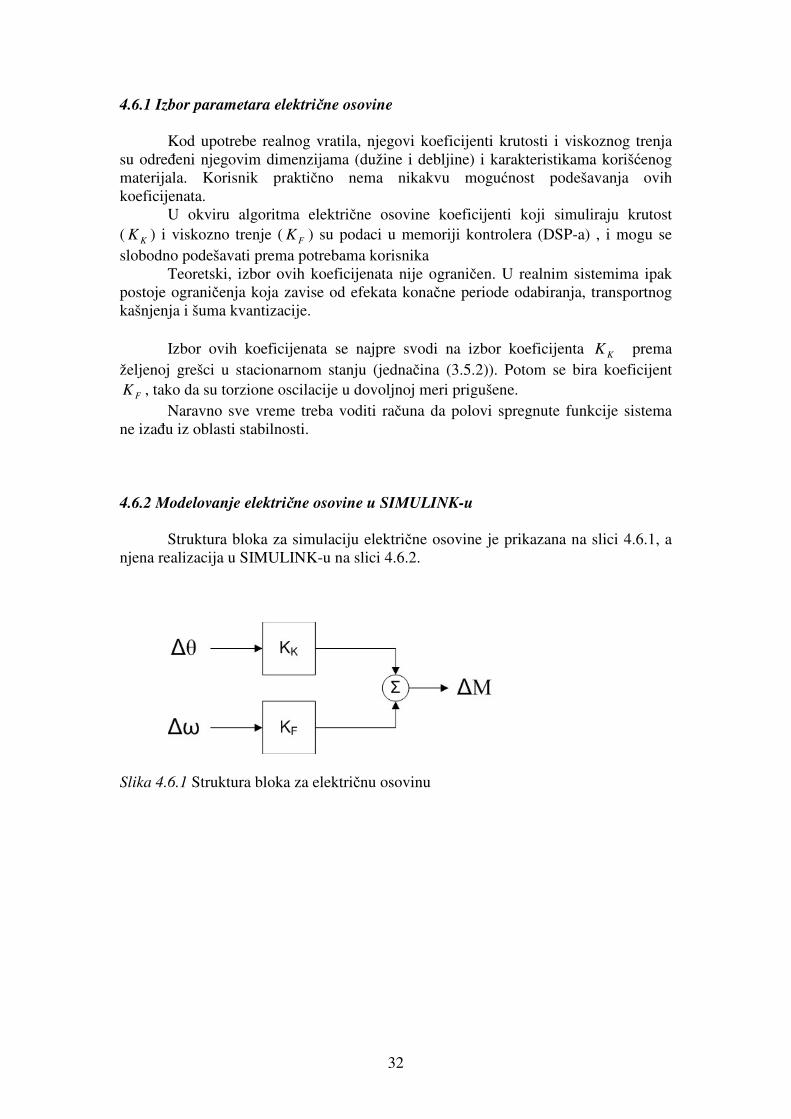
Struktura bloka za simulaciju elektrine osovine je prikazana na slici 4.6.1, a njena realizacija u SIMULINK-u na slici 4.6.2.
Slika 4.6.1 Struktura bloka za elektrinu osovinu

33
Slika 4.6.2 SIMULINK model bloka za elektrinu osovinu

34
4.7. Regulator brzine
U sistemu sa elektrinom osovinom regulator brzine služi za regulisanje srednje vrednosti brzine dva motora. Izbor strukture regulatora i njegova realizacija su potpuno isti kao i u obinom brzinskom servopogonu, ali je podešavanje njegovih parametara drugaije, što e biti objašnjeno u poglavlju 4.8.
U brojnim primenama brzinskog servopogona, zahteva se da je pri konstantnom referentnom ulazu, statika greška brzine bude nula, da ne postoji uticaj konstantnog momenta optereenja na tanost brzine u stacionarnom stanju i da je odziv brzine na odskonu pobudu striktno aperiodian sa što kraim vremenom smirenja.
Prva dva zahteva koja se odnose na tanost regulisane brzine u stacionarnom stanju bie ostvarena izborom odgovarajue strukture regulatora brzine. 4.7.1 Izbor upravljake strukture regulatora brzine
Uprošeni model brzinske petlje relevantan za izbor upravljake strukture regulatora brzine prikazan je na sl. 4.7.1. Jednostavnosti radi, uzima se da je sprega elektrine mašine i optereenja kruta i da nema kašnjenja u elektrinom podsistemu. U modelu na sl. 4.7.1, )(sG oznaava funkciju prenosa regulatora brzine iju strukturu treba odrediti.
Slika 4.7.1 Uprošeni model brzinske regulacione petlje.
Regulacioni sistem na slici 4.7.1 poseduje jedan integracioni lan (usled mehanike inercije), pa u obzir dolazi razmatranje primene najjednostavnijeg, proporcionalnog (P) regulatora brzine sa funkcijom prenosa:
PKsG =)( (4.7.1)
Sa P-regulatorom, funkcija spregnutog kontinualnog prenosa od referentnog
ulaza refω i poremeaja LT do izlaza ω glasi:
35
)(11
)()( sMCKsJ
sCKs
CKs opt
Pref
P
P
+−
+= ωω (4.7.2)
gde je J
KC m= , sintetiki koeficijent kojim su obuhvaeni parametri elektrinog i
mehanikog podsistema. Re je o sistemu prvog reda sa vremenskom konstantom
PCK1=τ , što znai da se svaka prelazna pojava, podstaknuta bilo od promene
reference, bilo od promene optereenja, odvija po jednostavnom eksponencijalnom zakonu. Meutim, ovaj sistem ne poseduje astatizam u odnosu na poremeaj, što znai da e, kada na sistem deluje konstantan moment optereenja, postojati statika greška.
Saglasno graninoj teoremi Laplasove transformacije, stacionarana vrednost brzine u sistemu na slici 4.7.1 sa P-regulatorom, pri dejstvu konstantnog referentnog ulaza )()( tht refref ωω = i konstantnog momenta optereenja )()( thTtT LL = data je izrazom:
Pm
optrefs KK
Mss −==∞
→ωωω )]([lim)(
0 (4.7.3)
a greška brzine:
Pm
optref KK
Me =∞−=∞ )()( ωω (4.7.4)
Saglasno izrazu (4.7.4), greška brzine e(∞) se u dovoljnoj meri može smanjiti
samo ako se pojaanje pK uini velikim. Meutim, velikim vrednostima pojaanja
pK odgovara velika vrednost propusnog opsega brzinske petlje ( pbw CKf =π2 ), pa se može desiti da nemodelovana dinamika izvede sistem iz oblasti stabilnosti. Osim toga, realizacija velike vrednosti pojaanja pK donosi i praktine probleme.
Statika greška brzine se u potpunosti može eliminisati ako se za regulaciju
brzine koristi regulator sa proporcionalno-integralnim (PI) dejstvom funkcije prenosa
sK
KsG IP +=)( (4.7.5)
gde su PK i IK , pojaanja proporcionalnog i integralnog dejstva, respektivno.
Sa PI-regulatorom, funkcija spregnutog kontinualnog prenosa od referentnog
ulaza refω i poremeaja LT do izlaza ω glasi:
)()(
1)(
)()( sM
sfs
Js
sfCKsCK
s optPI
refPI
IP −+
= ωω (4.7.6)
36
gde je )(sfPI , karakteristini polinom dat izrazom:
IPPI CKsCKssf ++= 2)( (4.7.7) Sistem na slici 4.7.1 sa PI-regulatorom poseduje potreban red astatizma u
odnosu na konstantan poremeaj, pa je saglasno graninoj teoremi Laplasove transformacije, stacionarna vrednost brzine:
refs
ss ωωω ==∞→
)]([lim)(0
(4.7.8)
a greška brzine:
0)()( =∞−=∞ ωωrefe (4.7.9)
Dakle, PI-regulator omoguava praenje konstantnog referentnog ulaza bez
statike greške i u sluaju kada na sistem deluje konstantan ili sporopromenljivi moment optereenja.
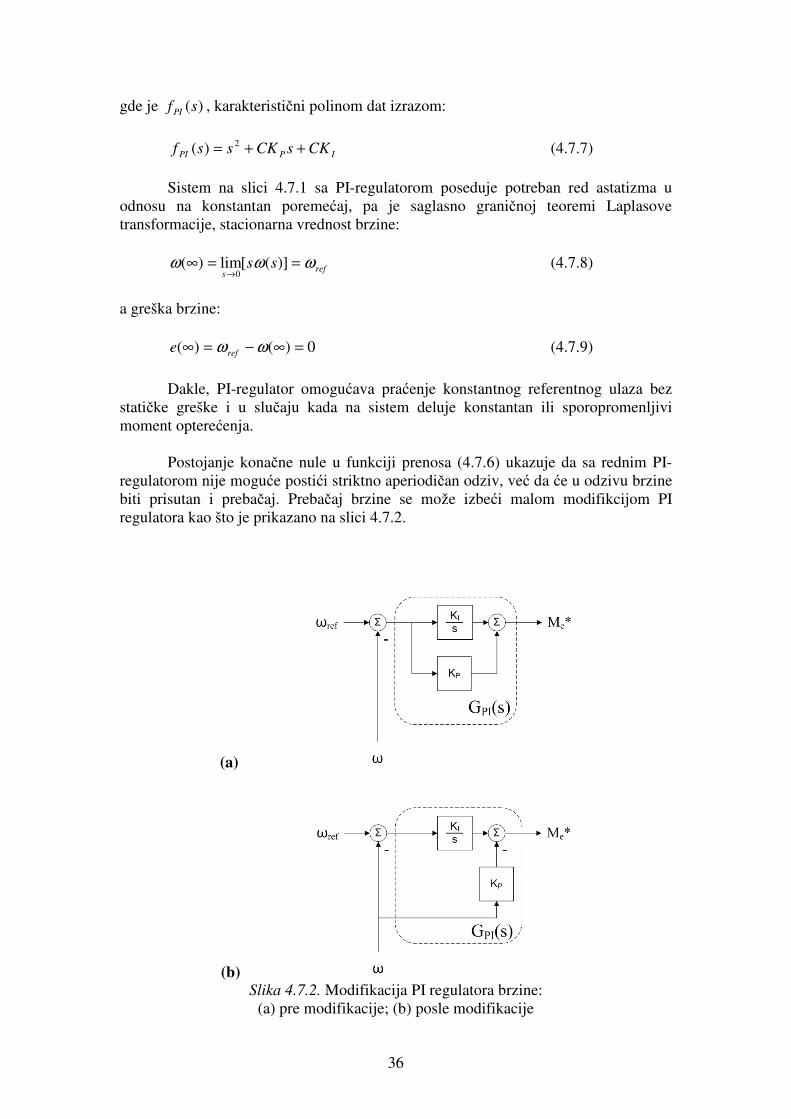
Postojanje konane nule u funkciji prenosa (4.7.6) ukazuje da sa rednim PI-
regulatorom nije mogue postii striktno aperiodian odziv, ve da e u odzivu brzine biti prisutan i prebaaj. Prebaaj brzine se može izbei malom modifikcijom PI regulatora kao što je prikazano na slici 4.7.2.
(a)
(b) Slika 4.7.2. Modifikacija PI regulatora brzine:
(a) pre modifikacije; (b) posle modifikacije
37
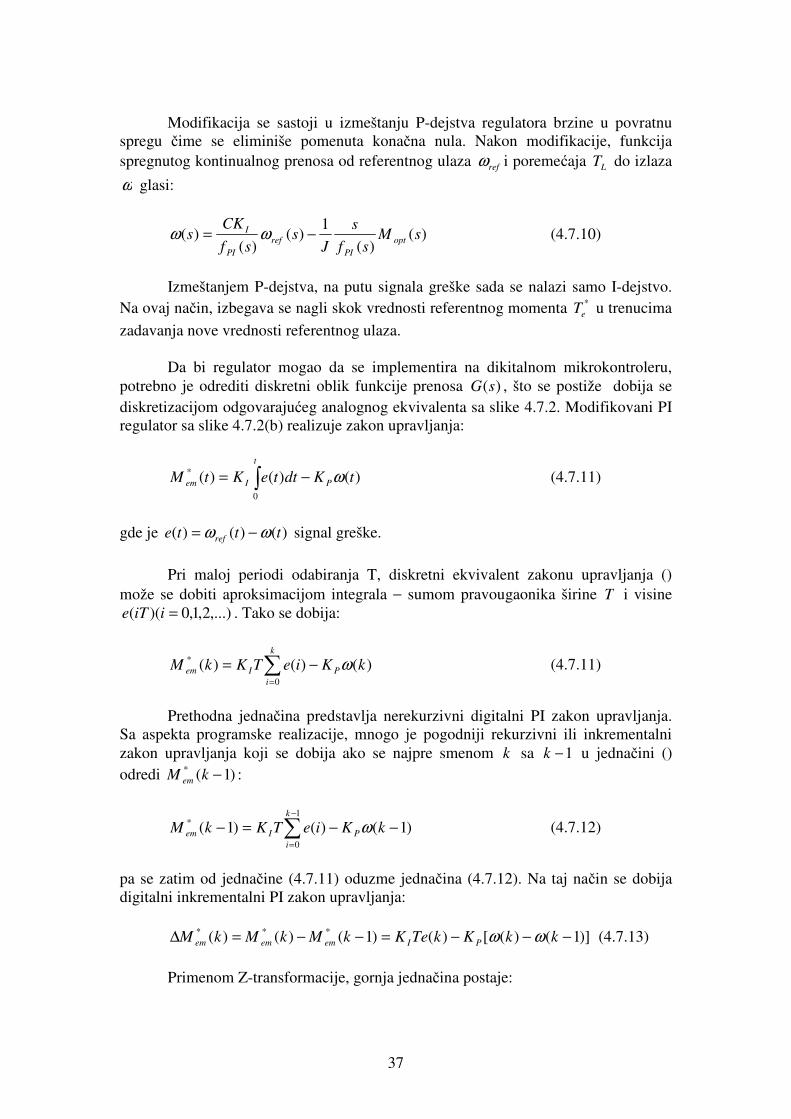
Modifikacija se sastoji u izmeštanju P-dejstva regulatora brzine u povratnu
spregu ime se eliminiše pomenuta konana nula. Nakon modifikacije, funkcija spregnutog kontinualnog prenosa od referentnog ulaza refω i poremeaja LT do izlaza
ω glasi:
)()(
1)(
)()( sM
sfs
Js
sfCK
s optPI
refPI
I −= ωω (4.7.10)
Izmeštanjem P-dejstva, na putu signala greške sada se nalazi samo I-dejstvo.
Na ovaj nain, izbegava se nagli skok vrednosti referentnog momenta *eT u trenucima
zadavanja nove vrednosti referentnog ulaza. Da bi regulator mogao da se implementira na dikitalnom mikrokontroleru,
potrebno je odrediti diskretni oblik funkcije prenosa )(sG , što se postiže dobija se diskretizacijom odgovarajueg analognog ekvivalenta sa slike 4.7.2. Modifikovani PI regulator sa slike 4.7.2(b) realizuje zakon upravljanja:
)()()(0
* tKdtteKtM P
t
Iem ω−= (4.7.11)
gde je )()()( ttte ref ωω −= signal greške.
Pri maloj periodi odabiranja T, diskretni ekvivalent zakonu upravljanja () može se dobiti aproksimacijom integrala − sumom pravougaonika širine T i visine
,...)2,1,0)(( =iiTe . Tako se dobija:
)()()(0
* kKieTKkM P
k
iIem ω−=
=
(4.7.11)
Prethodna jednaina predstavlja nerekurzivni digitalni PI zakon upravljanja.
Sa aspekta programske realizacije, mnogo je pogodniji rekurzivni ili inkrementalni zakon upravljanja koji se dobija ako se najpre smenom k sa 1−k u jednaini () odredi )1(* −kM em :
)1()()1(1
0
* −−=− −
=
kKieTKkM P
k
iIem ω (4.7.12)
pa se zatim od jednaine (4.7.11) oduzme jednaina (4.7.12). Na taj nain se dobija digitalni inkrementalni PI zakon upravljanja:
)]1()([)()1()()( *** −−−=−−=∆ kkKkTeKkMkMkM PIememem ωω (4.7.13)
Primenom Z-transformacije, gornja jednaina postaje:
38
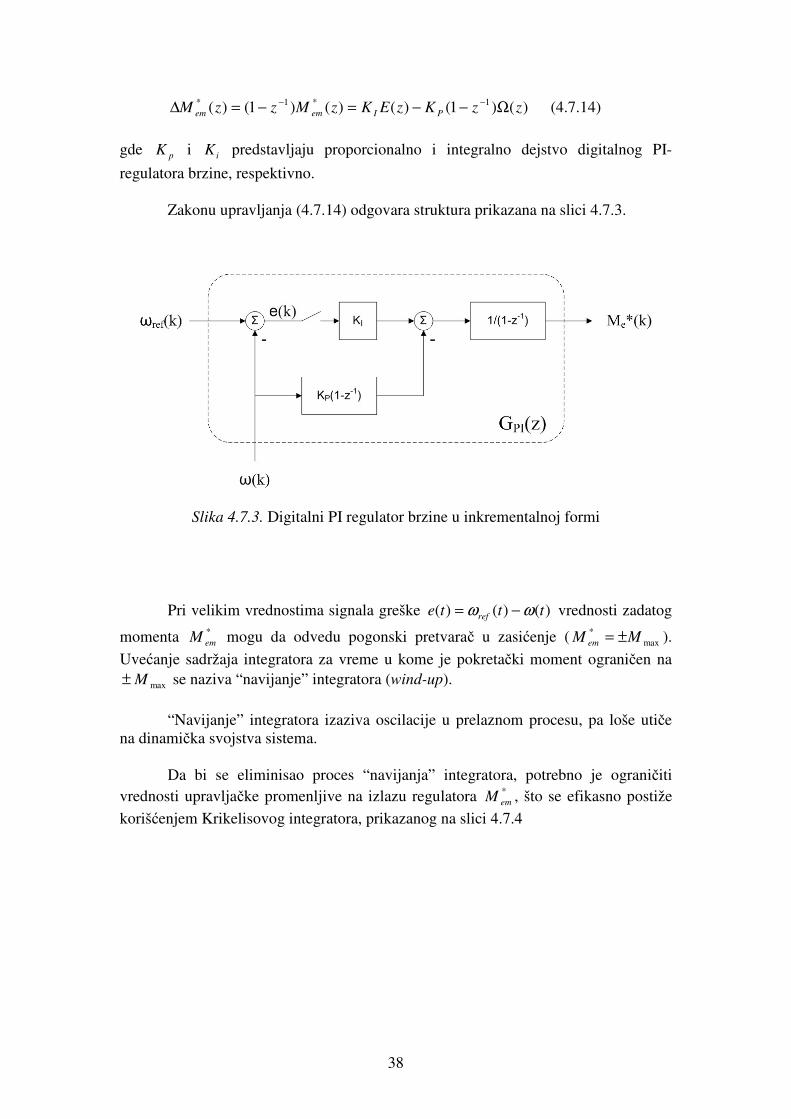
)()1()()()1()( 1*1* zzKzEKzMzzM PIemem Ω−−=−=∆ −− (4.7.14)
gde pK i iK predstavljaju proporcionalno i integralno dejstvo digitalnog PI-regulatora brzine, respektivno.
Zakonu upravljanja (4.7.14) odgovara struktura prikazana na slici 4.7.3.
Slika 4.7.3. Digitalni PI regulator brzine u inkrementalnoj formi
Pri velikim vrednostima signala greške )()()( ttte ref ωω −= vrednosti zadatog
momenta *emM mogu da odvedu pogonski pretvara u zasienje ( max
* MM em ±= ). Uveanje sadržaja integratora za vreme u kome je pokretaki moment ogranien na
maxM± se naziva “navijanje” integratora (wind-up). “Navijanje” integratora izaziva oscilacije u prelaznom procesu, pa loše utie
na dinamika svojstva sistema. Da bi se eliminisao proces “navijanja” integratora, potrebno je ograniiti
vrednosti upravljake promenljive na izlazu regulatora *emM , što se efikasno postiže
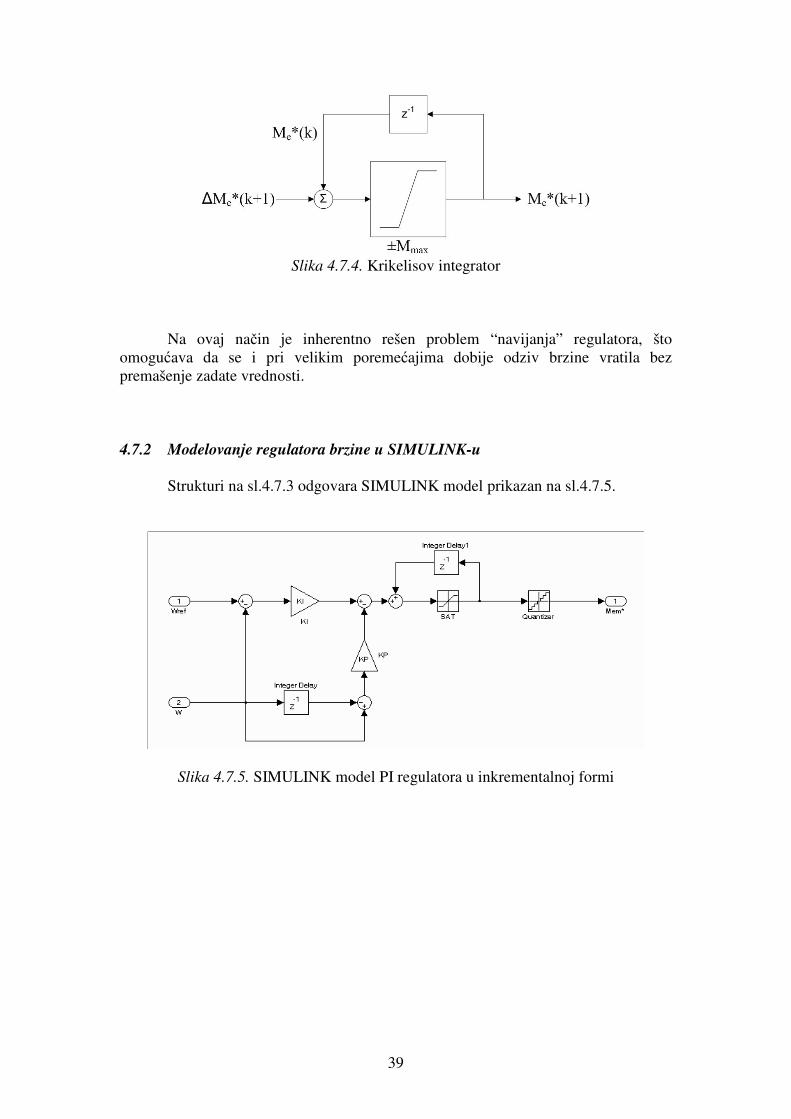
korišenjem Krikelisovog integratora, prikazanog na slici 4.7.4
39
Slika 4.7.4. Krikelisov integrator
Na ovaj nain je inherentno rešen problem “navijanja” regulatora, što
omoguava da se i pri velikim poremeajima dobije odziv brzine vratila bez premašenje zadate vrednosti. 4.7.2 Modelovanje regulatora brzine u SIMULINK-u
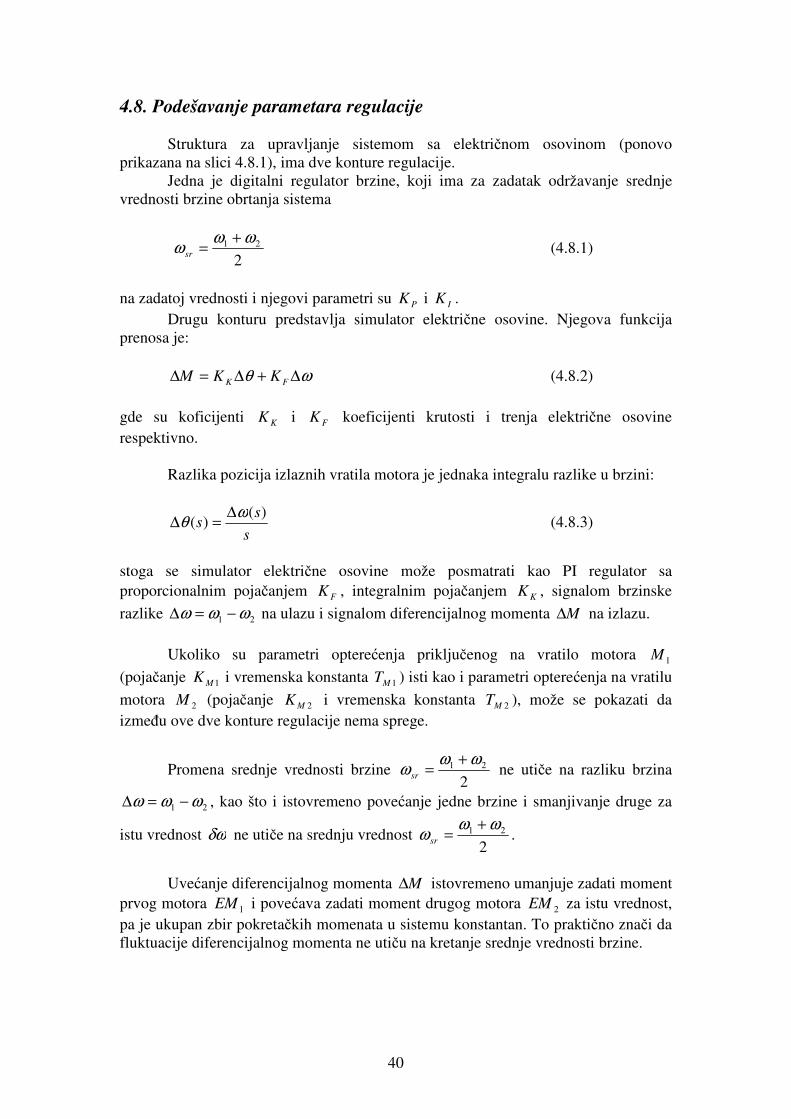
Strukturi na sl.4.7.3 odgovara SIMULINK model prikazan na sl.4.7.5.
Slika 4.7.5. SIMULINK model PI regulatora u inkrementalnoj formi
40
4.8. Podešavanje parametara regulacije
Struktura za upravljanje sistemom sa elektrinom osovinom (ponovo prikazana na slici 4.8.1), ima dve konture regulacije.
Jedna je digitalni regulator brzine, koji ima za zadatak održavanje srednje vrednosti brzine obrtanja sistema
2
21 ωωω +=sr (4.8.1)
na zadatoj vrednosti i njegovi parametri su PK i IK .
Drugu konturu predstavlja simulator elektrine osovine. Njegova funkcija prenosa je:
ωθ ∆+∆=∆ FK KKM (4.8.2)
gde su koficijenti KK i FK koeficijenti krutosti i trenja elektrine osovine respektivno.
Razlika pozicija izlaznih vratila motora je jednaka integralu razlike u brzini:
ss
s)(
)(ωθ ∆=∆ (4.8.3)
stoga se simulator elektrine osovine može posmatrati kao PI regulator sa proporcionalnim pojaanjem FK , integralnim pojaanjem KK , signalom brzinske razlike 21 ωωω −=∆ na ulazu i signalom diferencijalnog momenta M∆ na izlazu. Ukoliko su parametri optereenja prikljuenog na vratilo motora 1M (pojaanje 1MK i vremenska konstanta 1MT ) isti kao i parametri optereenja na vratilu motora 2M (pojaanje 2MK i vremenska konstanta 2MT ), može se pokazati da izmeu ove dve konture regulacije nema sprege.
Promena srednje vrednosti brzine 2
21 ωωω +=sr ne utie na razliku brzina
21 ωωω −=∆ , kao što i istovremeno poveanje jedne brzine i smanjivanje druge za
istu vrednost δω ne utie na srednju vrednost 2
21 ωωω +=sr .
Uveanje diferencijalnog momenta M∆ istovremeno umanjuje zadati moment
prvog motora 1EM i poveava zadati moment drugog motora 2EM za istu vrednost, pa je ukupan zbir pokretakih momenata u sistemu konstantan. To praktino znai da fluktuacije diferencijalnog momenta ne utiu na kretanje srednje vrednosti brzine.

41
Slika 4.8.1 – Blok šema upravljake strukture sistema sa elektrinom osovinom

42
Sa druge strane, promena srednje vrednosti momenata je reakcija na promenu srednje vrednosti brzina obrtanja. Uveanje zadatih vrednosti momentata 1EM i
2EM za istu vrednost ne menja vrednost diferencijalnog momenta M∆ , pa samim tim ni na promenu signala 21 ωωω −=∆ i 21 θθθ −=∆ . Na osnovu svega izloženog zakljuuje se da izmeu prelaznih pojava koje regulišu ove dve konture nema meusobne sprege. Stoga se podešavanje parametara regulacije za obe konture može obavljati potpuno nezavisno.
Najpre odreujemo pojaanja digitalnog regulatora brzine PK i IK , pri emu se smatra da je simulator elektrine osovine iskljuen (pojaanja KK i FK i signal diferencijalnog momenta M∆ su jednaki nuli). Funkcija prenosa i karakteristini polinom sistema su izvedeni u poglavlju 3.1. Kada je algoritam elektrine osovine iskljuen, karakteristini polinom ima sledei oblik:
)]()()[(21
1)( 21 zGzGzGzF PI ++= (4.8.4)
gde su, kao što je u poglavlju 3.1 pokazano:
1)(
−+=
zz
KKzG IPPI (4.8.5)
1
11)( 11
M
M
TT
TT
M
ez
eKzG
−
−
−
−= (4.8.6)
2
21)( 22
M
M
TT
TT
M
ez
eKzG
−
−
−
−= (4.8.7)
Zamenom ovih funkcija, karakteristini polinom se svodi na oblik:
012
23)( AzAzAzzF +++= (4.8.8)
gde su koeficijenti polinoma:
−−+−=−−−−
PT
TTT
MPTT
TT
MP KeeKKeeKKA MMMM )]1()1([21
211222110
21 MM TT
TT
ee−−
−

43
−+−++−−=−−−−
PTT
TT
MPT
TTT
MP KeeKKeeKKA MMMM )]1)(1()1)(1([21
122122111
+−+−−−−−−
IT
TTT
MPTT
TT
MP KeeKKeeKK MMMM )]1()1([21
21122211
2121 MMMM TT
TT
TT
TT
eeee−−−−
+++
+−+−=−−
PT
T
MPTT
MP KeKKeKKA MM )]1()1([21
2122112
−−+−+−−
IT
T
MPTT
MP KeKKeKK MM )]1()1([21
212211
)1( 21 ++−−−
MM TT
TT
ee Ukoliko sistem nije simetrian, tj. paramteri optereenja prikljuenog na vratilo motora 1M ( 1MK i 1MT ) nisu jednaki parametrima optereenja motora 2M ( 2MK i 2MT ) podešavanje parametara regulacije je veoma komplikovano. Parametri regulacije sistema sa elektrinom osovinom se mogu podesiti na relativno jednostavan nain ([3]), koji e biti primenjen i u ovom radu. Karakter odziva sistema sa zatvorenom povratnom spredgom e biti odreen prirodnom uestanošu dominantinih polova sistema. S obzirom na razlike u parametrima mehanikih podsistema motora 1M i 2M , ova prirodna uestanost se može odrediti u zavisnosti od vee vremenske konstante dva mehanika podsistema:
),max(2
21 MMn TT
=ω (4.8.9)
Periodu odabiranja treba izabrati tako da je:
n
TTω21
max =< (4.8.10)
Kvalitet odziva sistema i veliinu prebaaja odreuje faktor prigušenja (ζ ),
ija vrednost treba što više da teži jedinici. Ova procedura podešavanja parametara polazi od pretpostavke da je minimalna vrednost faktora prigušenja 6.0min =ζ .
Karakteristini polinom je treeg stepena, pa ima tri nule. Pored dva
diskutovana para dominantnih polova, sistem mora da ima i trei realan pol. Ako je vrednost tog pola u s-domenu σ , preslikavanjem u z-domen pol e se nai u taki
Tz eσσ = .
Sa parom dominantnih polova i treim realnim polom, karakteristina
jednaina sistema e imati sledei oblik:

44
++−− − 223 ])1cos(2[ zTez znTn σζωζω
0])1cos(2[ 222 =−+−+ −−− TTzn
T nnn ezeTe ζωζωζω σζω (4.8.11) Izjednaavanjem odgovarajuih koeficijenata jednaina (4.8.8) i (4.8.11),
dobijaju se tri linearne jednaine po PK , IK i zσ , što znai da je mogue izraunati pojaanja regulatora i vrednost realnog pola u funkciji odabrane uestanosti i faktora prigušenja dominantnih polova.
Matrini oblik ovih jednaina ima sledei izgled:
=
⋅
3
2
1
3331
232221
1211
0
1
b
b
b
K
K
aa
aaa
aa
z
I
P
σ (4.8.15)
gde su:
)]1()1([21
2122111211
MM TT
MPTT
MP eKKeKKaa−−
−+−==
)]1)(1()1)(1([21
1221221121
MMMM TT
TT
MPT
TTT
MP eeKKeeKKa−−−−
+−++−−=
IT
TTT
MPTT
TT
MP KeeKKeeKKa MMMM )]1()1([21
2112221122
−−−−−+−−=
)1cos(2 223 ζωζω −−= − Tea n
Tn
IT
TTT
MPTT
TT
MP KeeKKeeKKa MMMM )]1()1([21
2112221131
−−−−−+−=
Tnea ζω2
33−=
)1cos(21 21
21 ζωζω −−++= −−−
Teeeb nTT
TTT
nMM
TTT
TT
TT
TT
nMMMM eeeeeb ζω22
2121 −−−−−
+−−−=
213
MM TT
TT
eeb−−
=
45
Za poznate željene parametre odziva ( nω i ζ ), rešavanjem ove jednaine dobijaju se potrebne vrednosti parametara regulacije ( PK i IK ), kao i vrednost treeg pola sistema ( zσ ). Na kraju je potrebno proveriti da li je dobijeni trei pol sistema podešen. Ako posmatramo polove sistema u s-ravni, ovaj pol ne sme biti dominantan, tj. mora biti manji od realnog dela dominantih polova:
nz
Tζωσσ −<= )ln(
(4.8.16)
Ukoliko je ovaj uslov ispunjen, trei pol e pozitivno uticati na kvalitet odziva,
jer e dodatno prigušivati prelazne pojave. ukoliko to nije sluaj potrebno je korigovati inicijalne zahteve i postaviti blaže uslove u pogledu brzine i kvaliteta odziva.

46
4.9. Blok za merenja
Blok za merenja služi za merenje pozicije i brzine oba motora. Podaci o uglovima, razlici uglova i brzini se prebacuju nazad u MATLAB, gde
mogu dalje da se obrauju. Izgled bloka za merenje je prikazan na slici 4.9.1
Slika 4.9.1 Izgled bloka za merenje
U glavnom prozoru MATLAB-a su podaci dostupni u sledeim promenljivama:
Teta1 - 1θ ; položaj izlaznog vratila motora 1M Teta2 - 2θ ; položaj izlaznog vratila motora 2M dTeta - θ∆ ; razlika položaja izlaznih vratila dva motora W1 - 1ω ; brzina obrtanja motora 1M W2 - 2ω ; brzina obrtanja motora 2M W1_S - 1ω ; brzina obrtanja motora 1M u stacionarnom stanju; W2_S - 2ω ; brzina obrtanja motora 2M u stacionarnom stanju.
Promenljive W1_S i W2_S su iste kao i poslednjih 1000 odbiraka promenljivih W1 i W2 i služe za proraun valovitosti brzine u stacionarnom stanju.
47
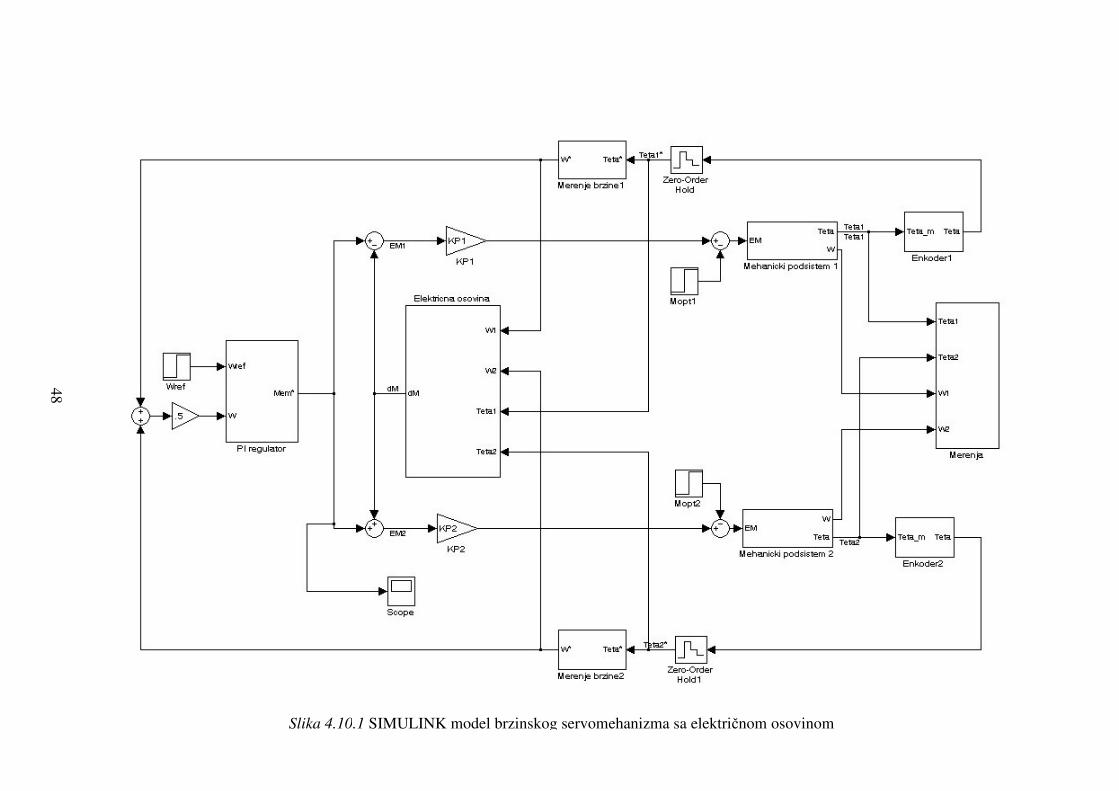
4.10. Prikaz kompletnog SIMULINK modela sistema sa elektrinom osovinom
U ovom poglavlju je prikazan kompletan SIMULINK model brzinskog servomehanizma sa elektrinom osovinom. Model odgovara strukturi prikazanoj na slici 4.1.1 i dat je na slici 4.10.1. Blokovi “Mehanicki podsistem 1” i “Mehanicki podsistem 2” su opisani u poglavlju 4.2. Blokovi “KP1” i “KP2” predstavljaju servopojaavae i modelovani su proporcionalnim dejstvom kao što je to opisano u poglavlju 4.3. Blokovi “Enkoder 1” i “Enkoder 2” su opisani u poglavlju 4.4. Blokovi “Merenje brzine 1” i “Merenje brzine 2” su opisani u poglavlju 4.5. Blok “Elektricna osovina” je opisan u poglavlju 4.6. Blok “PI regulator” je opisan u poglavlju 4.7. Blok “Merenja” je opisan u poglavlju 4.9. SIMULINK model je realizoan u datoteci elos.mdl. Za korišenje SIMULINK modela koriste se dva komandna fajla start.m i test.m.
U oba fajla treba uneti karakteristike posmatranog modela: - parametre zahtevanog odziva; - kao i periodu odabiranja; - parametre elektrinog i mehanikog podsistema; - parametre enkodera;
U komandni fajl start.m potrebno je uneti i koeficijente elektrine osovine ( KK i FK ). Fajl simulira model elos.mdl za zadate koeficijente i kao rezultat prikazuje odziv brzina dva motora ( )(1 tω , )(2 tω i )(tθ∆ ). i razliku u pozicijama dva izlazna vratila. U komandni fajl test.m treba uneti koeficijent krutosti ( KK ) i opseg koeficijenata trenja ( FK ) elektrine osovine. Fajl simulira odziv sistema za zadati koeficijent krutosti i opseg koeficijenata trenja. Kao rezultat ovih simulacija dobijaju se zavisnosti talasnosti brzine u stacionarnom stanju )( Fripple Kω i maksimalne razlike
u poziciju dva vratila od koeficijenta trenja elektrine osovine )( FKθ∆ , a za konstantan koeficijent krutosti ( KK ). U okviru komandnih fajlova se automatski izraunavaju optimalni parametri PI regulatora, prema algoritmu opisanom u poglavlju 4.8.
Takoe se ispituje i položaj treeg pola sistema, i u glavnom prozoru MATLAB-a se ispisuje poruka da li je njegov položaj dobar ili ne (“treci pol sistema - OK” ili “treci polsistema – NOT OK”).
Listing komandnih fajlova start.m i test.m je dat je u dodatku.
48
Slika 4.10.1 SIMULINK model brzinskog servomehanizma sa elektrinom osovinom
49
5. Rezultati simuliranja modela SIMULINK model sistema sa elektrinom osovinom opisan u poglavlju 4 može da se iskoristi za ispitivanje uticaja šuma kvantizacije pozicije na tanost rada algoritma elektrine osovine.
Perioda odabiranja modela je sT 001.0= , a zahtevani odziv ima sledee
parametre:
srad
n 5=ω - prirodna uestanost; 7.0=ζ - koeficijent prigušenja.
Pojaanje servopojaavaa je u svim simulacijama jednako jedinici:
121 == PP KK U svim simulacijama izbor koeficijenta elektrine osovine ( KK i FK ) se vrši na nain opisan u poglavlju 4.6.1. Izbor koeficijenta trenja se obavlja uz uslov da talasnost brzine u stacionarnom stanju bude manja od s
radripple 1≤ω .
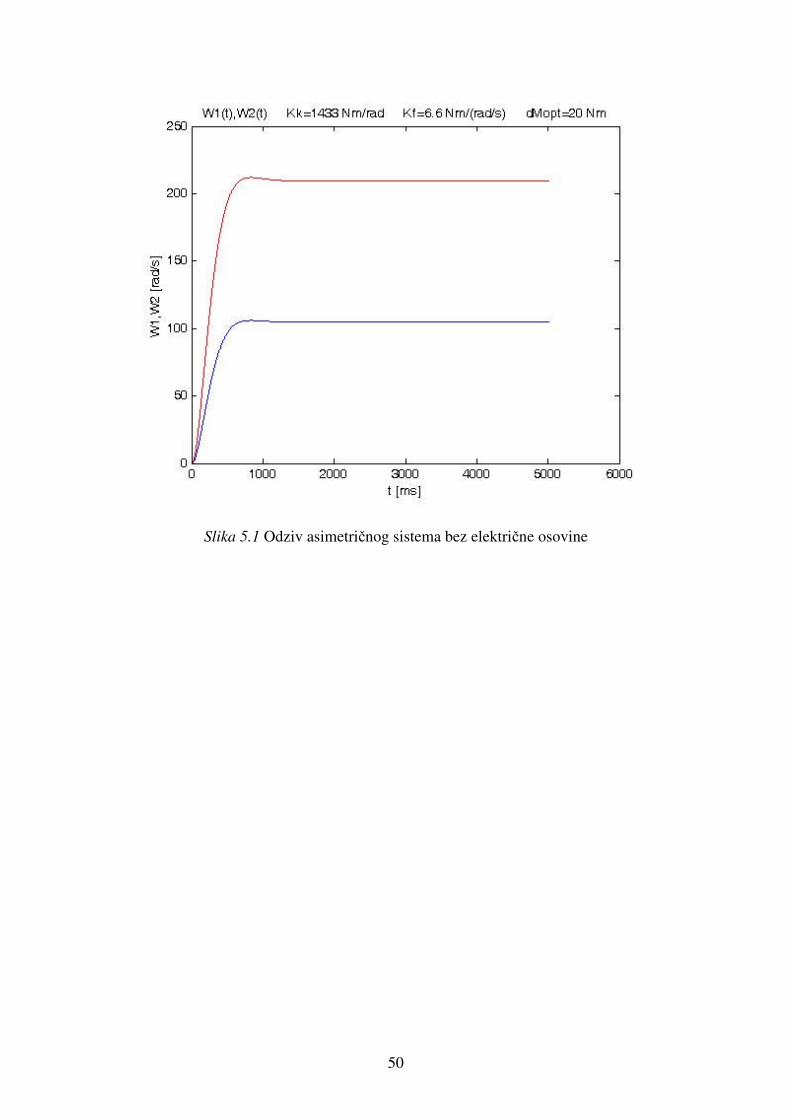
U poglavlju 5.1. bie ispitan uticaj kvantizacije na koristan opseg koeficijenta krutosti elektrine osovine. U poglavlju 5.2. bie prikazan postupak podešavanja parametara elektrine osovine u zavisnosti od maksimalne razlike momenta optereenja dva motora. U poglavlju 5.3 bie korišen simetrian sistem (parametri optereenja dva motora su isti), dok e u poglavlju biti analiziran asimetrian sistem (razliiti parametri optereenja).
Radi ilustracije na slici 5.1 je prikazan odziv asimetrinog sistema kada ne postoji elektrina osovina. Zbog razliitih optereenja motora, i njihove brzine e biti razliite.
50
Slika 5.1 Odziv asimetrinog sistema bez elektrine osovine

51
5.1. Ispitivanje korisnog opsega krutosti elektrine osovine u zavisnosti od rezolucije enkodera
Parametri optereenja sistema u ovoj simuaciji su:
sTM 2.01 = sTM 4.02 =
41 =MK 81 =MK Ispitivanje se vrši na sledei nain: 1) parametar KK se menja u opsegu od 100 do maksimalne vrednosti za koju je mogue podesiti osovinu tako da talasnost brzine bude u zadatim granicama, u koracima od 100; 2) parametar FK se bira tako da razlika pozicija bude minimalna i da talasnost brzine bude u dozvoljenim granicama;
Posmatra se zavisnost ostvarene razlike u poziciji za razliite vrednosti krutosti osovine. Eksperiment se ponavlja za razliite vrednosti broja bita enkodera
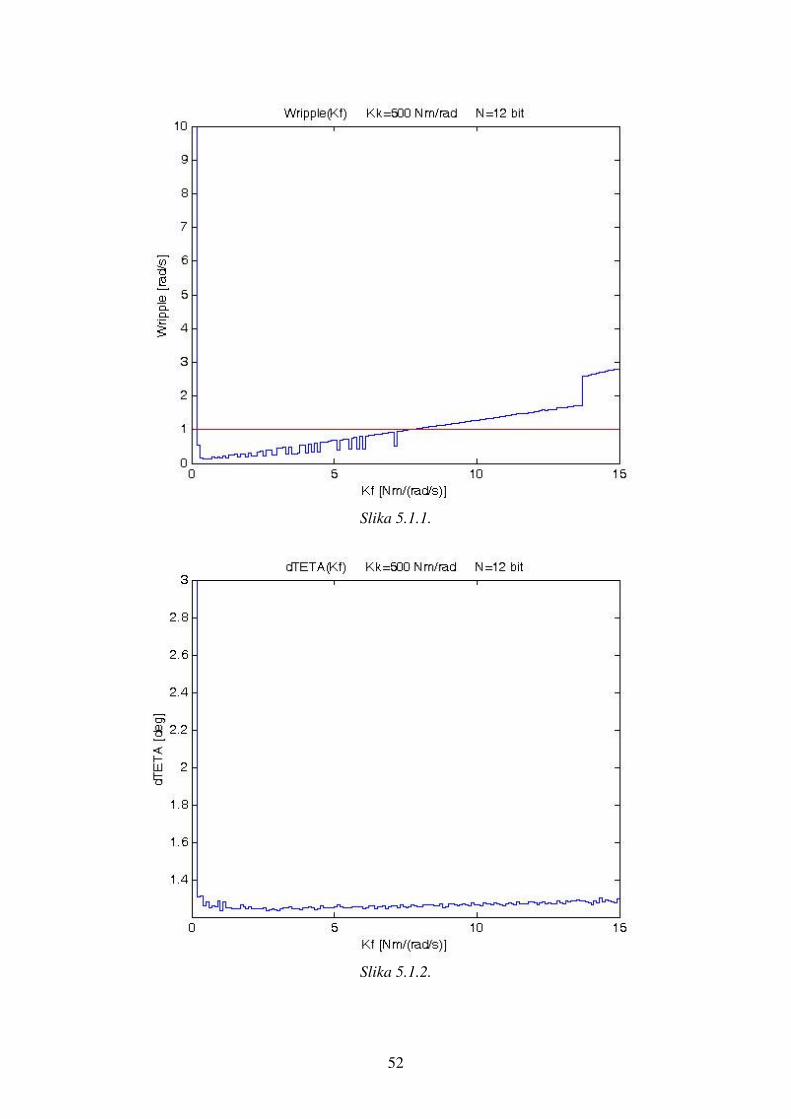
121 =N i 102 =N . Korišenjem komandnog fajla test.m za svako KK su dobijeni su grafici
zavisnosti talasnosti brzine (KKFripple K )(ω ) i razlike u poziciji (
KKFK )(θ∆ ).
Primer ovih grafika za radNm
KK 500= je dat na slikama 5.1.1. i 5.1.2 za 12=N i na slikama 5.1.3 i 5.1.4 za 10=N .
Sa ovih grafika se oita vrednost koeficijenta FK , tako da je poziciona razlika
minimalna i da je rippleω u dozvoljenim granicama.
Za radNm
KK 500= i 12=N minimalna razlika u poziciji tokom odziva se prema slikama 5.1.1. i 5.1.2. dobija za
srad
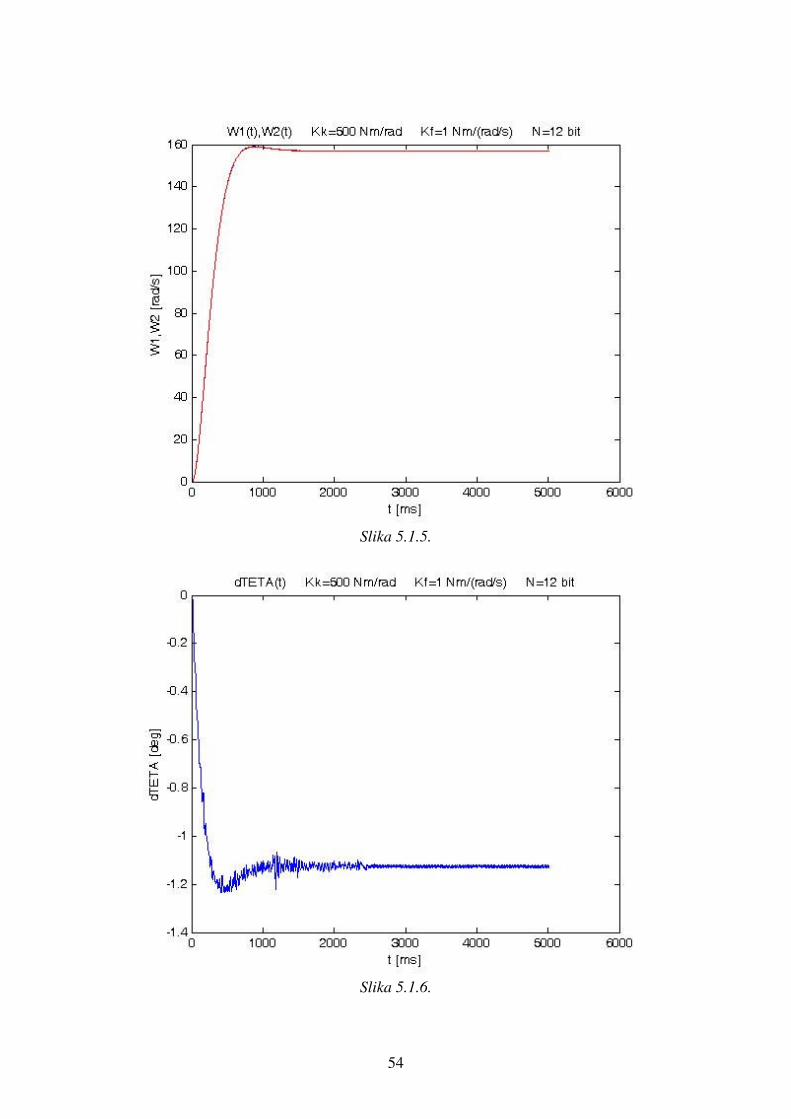
NmFK 1= . Odziv sistema i signal pozicione
greške su dobijeni upotrebom komandnog fajla start.m, i prikazani su na slikama 5.1.5 i 5.1.6 respektivno.
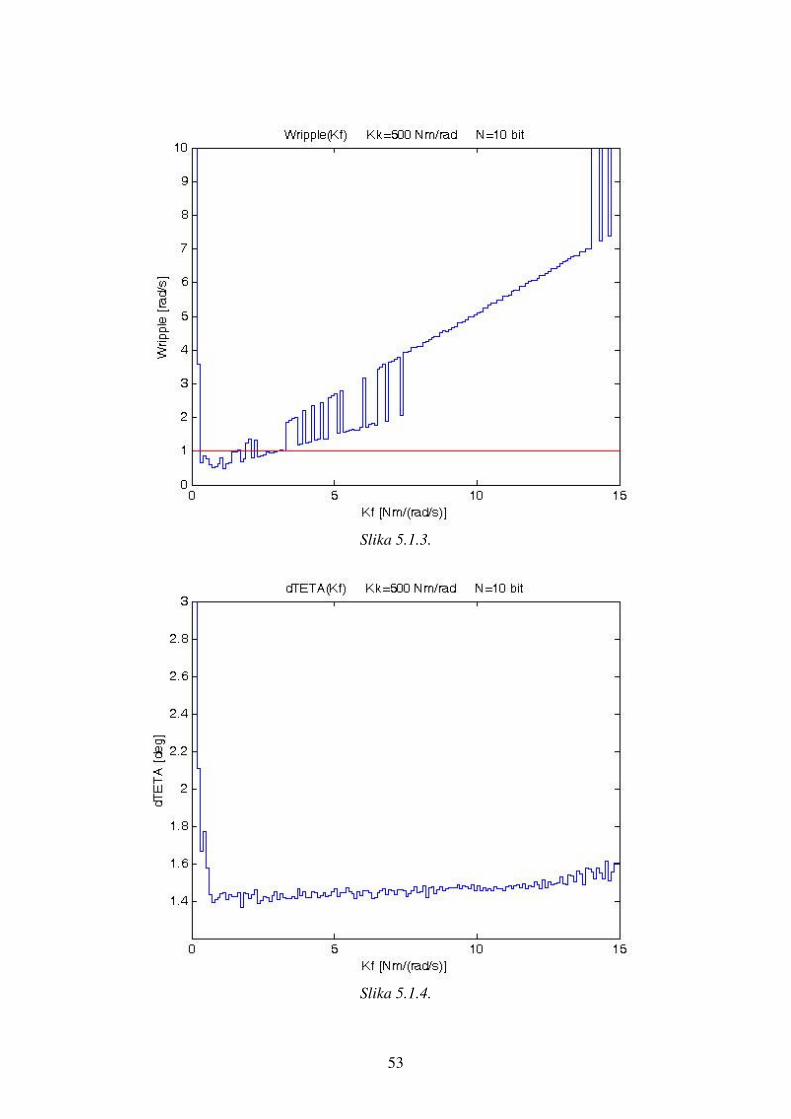
Za rad
NmKK 500= i 10=N minimalna razlika u poziciji tokom odziva se
prema slikama 5.1.3. i 5.1.4. dobija za s
radNm
FK 7.1= . Odziv sistema i signal pozicione greške su su dobijeni upotrebom komandnog fajla start.m, i prikazani su na slikama 5.1.7 i 5.1.8 respektivno.
52
Slika 5.1.1.
Slika 5.1.2.
53
Slika 5.1.3.
Slika 5.1.4.
54
Slika 5.1.5.
Slika 5.1.6.

55
Slika 5.1.7.
Slika 5.1.8.
56
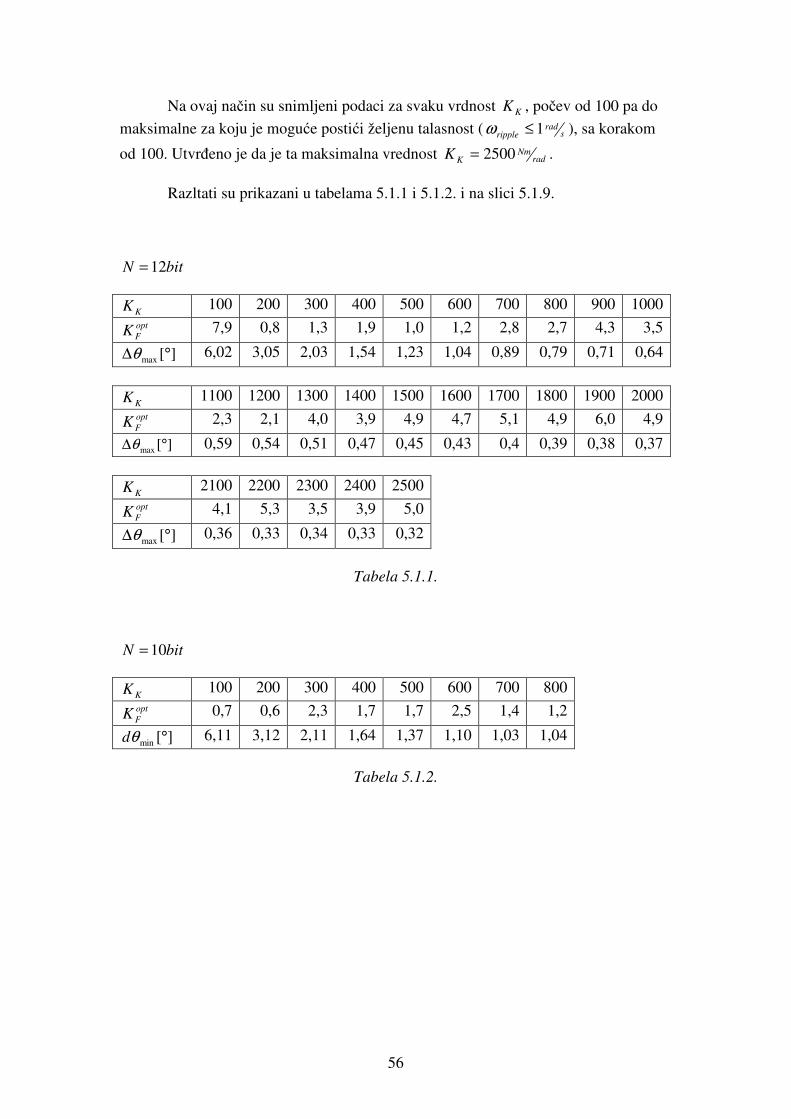
Na ovaj nain su snimljeni podaci za svaku vrdnost KK , poev od 100 pa do maksimalne za koju je mogue postii željenu talasnost ( s
radripple 1≤ω ), sa korakom
od 100. Utvreno je da je ta maksimalna vrednost radNm
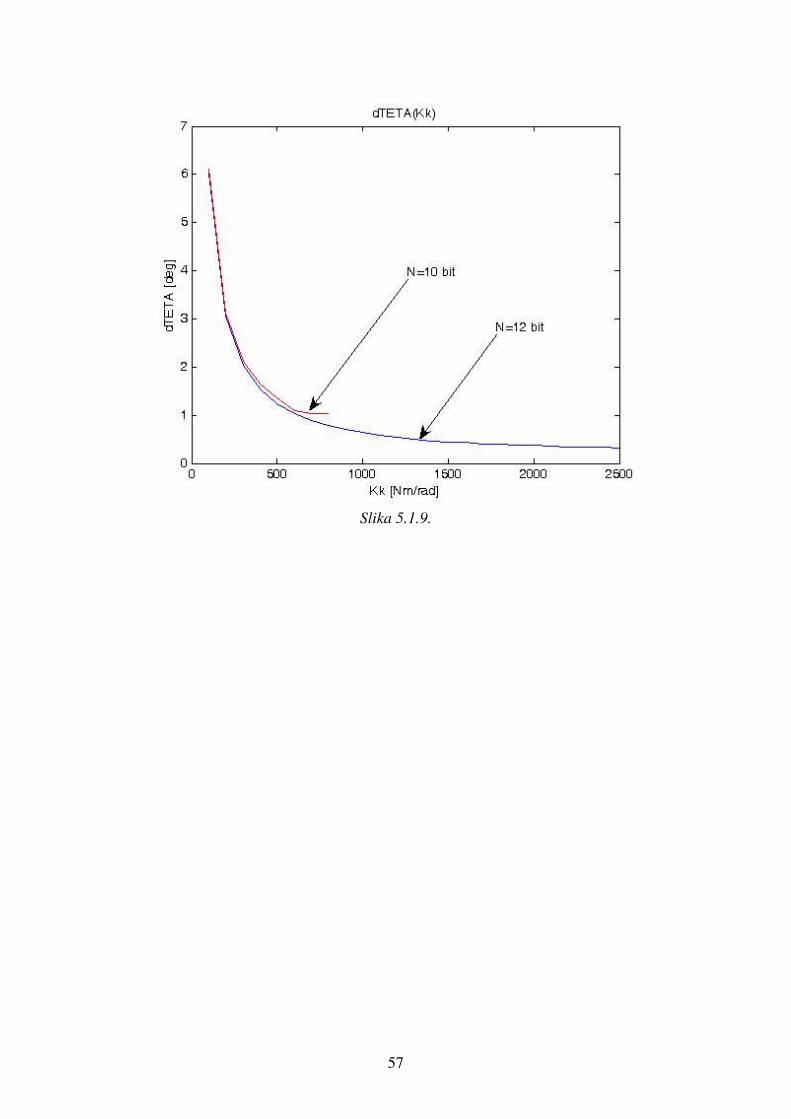
KK 2500= . Razltati su prikazani u tabelama 5.1.1 i 5.1.2. i na slici 5.1.9.
bitN 12=
KK 100 200 300 400 500 600 700 800 900 1000 optFK 7,9 0,8 1,3 1,9 1,0 1,2 2,8 2,7 4,3 3,5
][max °∆θ 6,02 3,05 2,03 1,54 1,23 1,04 0,89 0,79 0,71 0,64
KK 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 optFK 2,3 2,1 4,0 3,9 4,9 4,7 5,1 4,9 6,0 4,9
][max °∆θ 0,59 0,54 0,51 0,47 0,45 0,43 0,4 0,39 0,38 0,37
KK 2100 2200 2300 2400 2500 optFK 4,1 5,3 3,5 3,9 5,0
][max °∆θ 0,36 0,33 0,34 0,33 0,32
Tabela 5.1.1.
bitN 10=
KK 100 200 300 400 500 600 700 800 optFK 0,7 0,6 2,3 1,7 1,7 2,5 1,4 1,2
][min °θd 6,11 3,12 2,11 1,64 1,37 1,10 1,03 1,04
Tabela 5.1.2.
57
Slika 5.1.9.

58
5.2. Podešavanje koeficijenata elektrine osovine U ovoj simulaciji optereenje sistem je simetrian:
sTT MM 2.011 ==
421 == MM KK Ispitivanje se vrši na sledei nain: 1) za željenu vrednost maksimalne razlike u grešci °= 4,0zeljeθ i za poznatu
maksimalnu razliku u momentima optereenja 21 optoptopt MMM −=∆ , prema
jednaini (3.2.5) se izraunava potrebna vrednost parametra KK ; 2) parametar FK se bira tako da razlika pozicija bude minimalna i da talasnost brzine bude u dozvoljenom opsegu ( s
radripple 1<ω );
Potporedi se ostvarena vrednost pozicione greške sa željenom.
Posmatra se ostvarena razlike u poziciji naspram željene, za razliite vrednosti
krutosti osovine. Podešavanje elektrine osovine se vrši za razliite vrednosti razlike momenta optereenja: NmM opt 11 =∆ , NmM opt 32 =∆ , mM opt 53 =∆ ,
NmM opt 104 =∆ , NmM opt 155 =∆ i NmM opt 206 =∆ . Zbir dva momenta optereenja je u svim sluajevima isti:
NmMM optopt 2021 =+
Potrebne vrednosti KK su dobijene iz jednaine (3.2.5) prema maksimalnoj razlici optereenja 21 optoptopt MMM −=∆ . Optimalne vrednosti FK se pronalaze na isti nain kao i u poglavljima 5.1. i 5.2.
Na slikama 5.3.1. i 5.3.2. prikazan je primer odziva sistema i greške u poziciji
za NmM opt 10=∆ , dobijen korišenjem komandnog fajla start.m. Potrebna vrednost
KK je radNm717 , a optimalna vrednost FK je
srad
Nm5,5 .

59
Slika 5.2.1.
Slika 5.2.2.
60
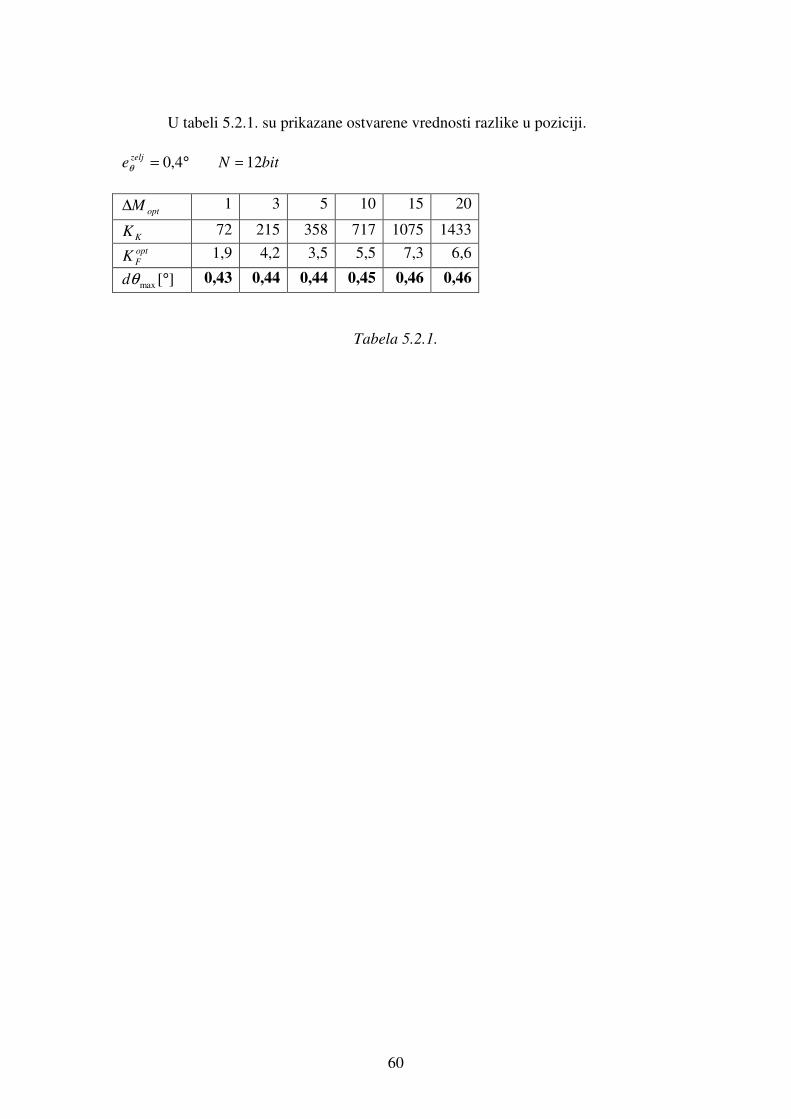
U tabeli 5.2.1. su prikazane ostvarene vrednosti razlike u poziciji.
°= 4,0zeljeθ bitN 12=
optM∆ 1 3 5 10 15 20
KK 72 215 358 717 1075 1433 optFK 1,9 4,2 3,5 5,5 7,3 6,6
][max °θd 0,43 0,44 0,44 0,45 0,46 0,46
Tabela 5.2.1.
61
6. Zakljuak
U poglavlju 5.1. zadatak je bio ispitati uticaj rezolucije enkodera na rad elektrine osovine u asimetrino optereenom sistemu.
Prema dobijenim rezultazima izloženim u tabelama 5.1.1. i 5.1.2 i na slici 5.1.9. mogu se izvesti sledei zakljuci: da bi se ostvarila manja razlika u poziciji dva sistema potrebno je izabrati veu krutost elektrine osovine ( KK ).
Odziv sistema e u stacionarnom stanju imati izvesnu talasnost, koja potie od šuma kvantizacije koji nastaje zbog konane tanosti korišenog senzora pozicije – enkoder. Za svako KK je mogue pronai optimalnu vrednost koeficijenta trenja elektrine osovine ( FK ), tako da je ova talasnost minimalna. Meutim, postoji konana vrednost koeficijenta KK , iznad koje više nije mogue postii željenu talasnost. Dalje poveanje KK vodi sistem u nestabilnost.
Prema dobijenim rezultatima za enkoder manje rezolucije ( bitN 10= ), opseg upotrebljivih vrednosti krutosti elektrine osovine je skoro tri puta manji u odnosu na enkoder vee rezolucije ( bitN 12= ). Vidi se da je sa enkoderom vee tanosti mogue ostvariti tri puta manju grešku pozicije izmeu dva izlazna vratila.
Dakle, može se zakljuiti da senzor pozicije vee tanosti omoguava
izbor veeg koeficijenta krutosti elektrine osovine, a samim tim i manju maksimalnu razliku izmeu pozicija dva vratila. U praksi se naješe koristi simetrian sistem sa elektrinom osovinom ( 21 PP KK = , 21 MM KK = , 21 MM TT = ). Motori, iako isti, nailaze na razliite otpore pri kretanju, pa je potrebno realizovati sistem prema najveoj razlici u momentu optereenja koja može da se javi na vratilima dva motora. U poglavlju 5.2. je prikazan metod izbora parametara elektrine osovine KK i
FK , prema željenoj maksimalno dozvoljenoj grešci pozicije izmeu dva vratila i maksimalnoj razlici momenata optereenja koja može da se javi u sistemu. Zbog konane tanosti enkodera, signal greške pozicije e sadržati šum, što dovodi do toga da je ostvarena vrednost razlike u poziciji dva izlazna vratila nešto vea nego što je to teorijski predvieno (Tabela 5.2.1 – Primer na slici 5.2.2). Takoe ta razlika neznatno raste, što je vea krutost sistema. Da bi se efekti kvantizacije izbrisali, potrebnoje usvojiti nešto veu krutost sistema od one predviene teorijom (jednaina (3.2.5)).

62
DODATAK: Listing komandnih fajlova start.m
clc; clear all; open('elos.mdl'); % otvaranje modela % PARAMETRI ZAHTEVANOG ODZIVA Wn=5; % [rad/s] ksi=.7; % PERIODA ODABIRANJA T=0.001; % [s] % PARAMETRI ENKODERA N =12; % [broj bita] rezolucija enkodera Kn=1; % prenosni odnos enkodera kvant = 2*pi/(2^N); % kvantizacioni interval enkodera % PARAMETRI ELEKTRICNE OSOVINE KF=0; % koeficijent viskoznog trenja elektricne KK=0; % koeficijent krutosti elektricne osovine % PARAMETRI ELEKTRICNOG PODSISTEMA KP1=1; KP2=1; % PARAMETRI MEHANICKOG PODSISTEMA Km1=4; Km2=8; Tm1=0.2; % [s] Tm2=0.4; % [s] % PRORACUN PARAMETARA PI REGULATORA (POGLAVLJE 4.8) K1=KP1*Km1; K2=KP2*Km2; A=exp(-T/Tm1); B=exp(-T/Tm2); a11=.5*(K1*(1-A)+K2*(1-B)); a12=a11; a21=-0.5*(K1*(1-A)*(1+B)+K2*(1-B)*(1+A)); a22=-.5*(K1*(1-A)*B+K2*(1-B)*A); a23=-2*exp(-ksi*Wn*T)*cos(Wn*T*sqrt(1-ksi^2)); a31=0.5*(K1*B*(1-A)+K2*A*(1-B)); a33=exp(-2*ksi*Wn*T); b1=A+B+1-2*exp(-ksi*Wn*T)*cos(Wn*T*sqrt(1-ksi^2)); b2=-A-B-A*B+exp(-2*ksi*Wn*T); b3=A*B; AA=[a11 a12 1 a21 a22 a23 a31 0 a33]; BB=[b1 b2 b3]; KAB=AA^(-1)*BB; % PARAMETRI PI REGULATORA KP=KAB(1); % proporcionalno pojacanje

63
% PARAMETRI PI REGULATORA KP=KAB(1); % proporcionalno pojacanje disp('Kp = '); disp(KP); KI=KAB(2); % integralno pojacanje disp('Ki = '); disp(KI); % PROVERA POLOZAJA TRECEG POLA SISTEMA sigmaz=KAB(3); % treci pol sistema u Z-domenu sigma=log(sigmaz)/T; % treci pol sistema u S-domenu mora biti manji od pole=-ksi*Wn; % trazenog realnog pola sistema if (sigma<=pole) disp('treci pol sistema - OK'); else disp('treci pol sistema - NOT OK'); end KK KF % POKRETANJE SIMULINK MODELA sim('elos.mdl'); % maksimalna poziciona razlika MaxdTeta = max(abs(dTeta))*180/pi % talasnost brzine u stacionarnom stanju Wripple = max(max(W1_S)-min(W1_S),max(W2_S)-min(W2_S)) figure(1) hold off; plot(dTeta*180/pi); xlabel('t [ms]'); ylabel('dTETA [deg]'); title('dTETA(t)'); figure(2) plot(W1) hold on; plot(W2,'r') hold off; xlabel('t [ms]'); ylabel('W1,W2 [rad/s]'); title('W1(t),W2(t)');
64
test.m clc; clear all; open('elos.mdl'); % PARAMETRI ZAHTEVANOG ODZIVA Wn=5; % [rad/s] ksi=.7; % PERIODA ODABIRANJA T=0.001; % [s] % PARAMETRI ENKODERA N =12; % [broj bita] rezolucija enkodera Kn=1; % prenosni odnos enkodera kvant = 2*pi/(2^N); % kvantizacioni interval enkodera % PARAMETRI ELEKTRICNOG PODSISTEMA KP1=1; KP2=1; % PARAMETRI MEHANICKOG PODSISTEMA Km1=4; Km2=8; Tm1=0.2; %[s] Tm2=0.4; %[s] i=1; % PARAMETRI ELEKTRICNE OSOVINE KK=300; % koeficijent krutosti elektricne osovine for KF = .1:0.1:15 % koeficijent viskoznog trenja elektricne
% se menja u FOR petlji % PRORACUN PARAMETARA PI REGULATORA (POGLAVLJE 4.8) K1=KP1*Km1; K2=KP2*Km2; A=exp(-T/Tm1); B=exp(-T/Tm2); a11=.5*(K1*(1-A)+K2*(1-B)); a12=a11; a21=-0.5*(K1*(1-A)*(1+B)+K2*(1-B)*(1+A)); a22=-.5*(K1*(1-A)*B+K2*(1-B)*A); a23=-2*exp(-ksi*Wn*T)*cos(Wn*T*sqrt(1-ksi^2)); a31=0.5*(K1*B*(1-A)+K2*A*(1-B)); a33=exp(-2*ksi*Wn*T); b1=A+B+1-2*exp(-ksi*Wn*T)*cos(Wn*T*sqrt(1-ksi^2)); b2=-A-B-A*B+exp(-2*ksi*Wn*T); b3=A*B; AA=[a11 a12 1 a21 a22 a23 a31 0 a33]; BB=[b1 b2 b3]; KAB=AA^(-1)*BB; % PARAMETRI PI REGULATORA KK KP=KAB(1); % proporcionalno pojacanje disp('Kp = '); disp(KP); KI=KAB(2); % integralno pojacanje disp('Ki = '); disp(KI); % PROVERA POLOZAJA TRECEG POLA SISTEMA
65
% PROVERA POLOZAJA TRECEG POLA SISTEMA sigmaz=KAB(3); % treci pol sistema u Z-domenu sigma=log(sigmaz)/T; % treci pol sistema u S-domenu mora biti manji od pole=-ksi*Wn; % trazenog realnog pola sistema if (sigma<=pole) disp('treci pol sistema - OK'); else disp('treci pol sistema - NOT OK'); end KK KF % POKRETANJE SIMULINK MODELA sim('elos.mdl'); % maksimalna poziciona razlika MaxdTeta(i) = max(abs(dTeta))*180/pi; if MaxdTeta(i)>10 MaxdTeta(i)=10; end % talasnost brzine u stacionarnom stanju Wripple(i)=max(max(W1_S)-min(W1_S),max(W2_S)-min(W2_S)); if Wripple(i)>10 Wripple(i)=10; end aaaa(i)= 1; % Wripple = 1 rad/s i=i+1; end figure(1) hold off; stairs((1:length(Wripple))/10,Wripple) hold on; plot((1:length(Wripple))/10,aaaa,'r') grid off; xlabel('Kf [Nm/(rad/s)]'); ylabel('Wripple [rad/s]'); title('Wripple(Kf)'); hold off; figure(2) stairs((1:length(MaxdTeta))/10, MaxdTeta) xlabel('Kf [Nm/(rad/s)]'); ylabel('dTETA [deg]'); title('dTETA(Kf)'); grid off;
66
Literatura [1] “Digitalni signali i sistemi – pregled teorije i zadaci”, Ž. urovi, B. Kovaevi,
Akademska misao, Beograd, 2000. [2] “Digitalni sistemi upravljanja”, Mili R. Stoji, ETF Beograd, Beograd, 1998. [3] ”Digitalno upravljanje elektrinim pogonima”, Slobodan N. Vukosavi,
Akademska misao, Beograd, 2003. [4] “Laboratorijska vežba – Ispitivanje dinamikih svojstava digitalno regulisanog
brzinskog servomehanizma putem raunarskih simulacija” , ETF Beograd - Katedra za mikroprocesorsko upravljanje elektromotornim pogonima, Beograd, 2006.
[5] “Mehanika I – statika i otpornost materijala sa zbirkom zadataka za srednje
strune škole”, M. Plavši, M. Miljkovi, S. Nikoli, Zavod za udžbenike i nastavna sredstva, Beograd, 2002.
[6] ”Mikroprocesorsko upravljanje elektromotornim pogonima - skripta”, Slobodan
N. Vukosavi, ETF Beograd - Katedra za mikroprocesorsko upravljanje elektromotornim pogonima, Beograd, 2005.
[7] “Optimal Cross-Coupled Synchronizing Control of Dual-Drive Gantry System for
a SMD Assembly Machine”, B. Chu, S. Kim, D. Hong, H.K. Park, J. Park, JSME International Journal, Series C, Vol. 47, No. 3, 2004.





























