Embed Size (px)
Citation preview

Analytische Berechnung thermischer Vorgänge in permanentmagneterregten
Synchronmaschinen
Von der Fakultät für Elektrotechnik der
Helmut-Schmidt-Universität Universität der Bundeswehr Hamburg
zur Erlangung des akademischen Grades eines Doktor-Ingenieurs genehmigte
DISSERTATION
von
Burghard Kipp aus Soest
Hamburg 2008

Erstgutachter: Univ.-Prof. Dr.-Ing. Ekkehard Bolte Helmut-Schmidt-Universität Universität der Bundeswehr Hamburg Zweitgutachter: Univ.-Prof. Dr.-Ing. Dieter Gerling Universität der Bundeswehr München Tag der mündlichen Prüfung: 20.März 2008

Vorwort
Die vorliegende Arbeit entstand während meiner Tätigkeit als wissenschaftlicher Mitarbeiter
am Institut für Elektrische Maschinen und Antriebe an der
Helmut Schmidt Universität / Universität der Bundeswehr Hamburg.
Mein Dank gilt Herrn Prof. Dr.-Ing. E. Bolte für die Anregung zu dieser Arbeit. Er hat durch
seine Anleitung, wertvolle Ratschläge sowie die ständige Bereitschaft zur Unterstützung mei-
ner Tätigkeit wesentlich zum Gelingen beigetragen.
Auch den Mitarbeitern des Instituts danke ich für ihre ständige Hilfsbereitschaft, die stets sehr
freundschaftliche Zusammenarbeit und auch für die moralische Unterstützung.
Ich danke Herrn Prof. Dr.-Ing. D. Gerling für die bereitwillige Übernahme des Koreferates.
Ein abschließender Dank sei meiner Familie und meinen Freunden gewidmet. Sie haben mich
stets unterstützt, wo immer es ihnen möglich war.
Hamburg im April 2008 Burghard Kipp


Inhaltsverzeichnis 5
Inhaltsverzeichnis
1. Einleitung 11
2. Aufstellen eines RC-Netzwerkes für die Wärmeflussberechnung 13
2.1 Verlustquellen der Maschine 13
2.2 Ableiten der Netzwerkelemente aus der Einkörpernäherung 14
2.3 Thermisches Ersatzschaltbild für die Mehrkörpernäherung 16
3. DGL-System für das Wärmeflussnetzwerk und dessen Lösung 23
3.1 Knotenpunktgleichungen 23
3.2 Lösung der Temperaturverlaufs-DGL für den homogenen Körper 24
3.3 Aufstellen der Lösungsmatrix 26
4. Analytische Bestimmung der Wärmekapazitäten 38
4.1 Spezifische Wärmekapazitäten der Teilkörper 38
4.1.1 Spezifische Wärmekapazität des Luftspaltes gδ 39
4.1.2 Spezifische Wärmekapazität des Kühlmittels im Gehäuse 40
4.2 Bestimmung der Teilkörpermassen 41
4.2.1 Wicklung in der Nut 41
4.2.2 Wicklung am Stirnkopf 42
4.2.3 Statorzähne 43
4.2.4 Statorjoch 44
4.2.5 Permanentmagnete 44
4.2.6 Rotoreisen 45
4.2.7 Rotorwelle 45
4.2.8 Gehäuse 46
4.3 Beispielrechnungen für die Wärmekapazität 47
5. Analytische Berechnung der Wärmeübergangswiderstände 49
5.1 Methoden zur Bestimmung der Wärmeübergangskoeffizientenα für un-terschiedliche Geometrien und Anströmzustände
49
5.1.1 Wärmeübergang durch Wärmeleitung in einer Grenzschicht zwischen Teilkörpern
50
5.1.2 Wärmeübergang durch Strahlung 52
5.1.3 Wärmeübergang durch Konvektion 58
5.2 Analytische Berechnung der Wärmeübergangswiderstände 61
5.2.1 Wärmeübergang von der Wicklung in der Nut zu dem Kühlmittel im Ge-häuse ( ,1KW )
61
5.2.2 Wärmeübergang des Stirnkopfes auf das Kühlmittel im Gehäuse ( ,2KW ) 61
5.2.2.1 Thermisch wirksame Oberflächen 61
5.2.2.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 66
5.2.3 Wärmeübergang von den Statorzähnen zum Kühlmittel im Gehäuse 71

Inhaltsverzeichnis 6
( ,3KW )
5.2.3.1 Thermisch wirksame Oberflächen 71
5.2.3.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 72
5.2.4 Wärmeübergang vom Statorjoch zum Kühlmittel im Gehäuse ( ,4KW ) 74
5.2.4.1 Thermisch wirksame Oberfläche 74
5.2.4.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 75
5.2.5 Wärmeübergang von der Luft im Luftspalt auf das Kühlmittel im Gehäuse ( ,5KW )
77
5.2.5.1 Thermisch wirksame Oberflächen 78
5.2.5.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 78
5.2.6 Wärmeübergang von den Permanentmagneten auf das Kühlmittel im Gehäuse ( ,6KW )
79
5.2.6.1 Thermisch wirksame Oberfläche 79
5.2.6.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 80
5.2.7 Wärmeübergang vom Rotorjoch zu dem Kühlmittel im Gehäuse ( ,7KW ) 80
5.2.7.1 Thermisch wirksame Oberfläche 81
5.2.7.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 81
5.2.8 Wärmeübergang von der Rotorwelle auf das Kühlmittel im Gehäuse ( ,8KW )
82
5.2.8.1 Thermisch wirksame Oberfläche 82
5.2.8.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 82
5.2.9 Wärmeübergang von den Wicklungen in den Nuten auf den Wickelkopf ( ,9KW )
83
5.2.10 Wärmeübergang vom Wickelkopf auf die Wicklungen am Stirnkopf ( ,10KW )
83
5.2.10.1 Thermisch wirksame Oberflächen 83
5.2.10.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 86
5.2.10.3 Einstrahlzahl zwischen den Statorzähnen und der Gesamtoberfläche des Wickelkopfes
91
5.2.11 Wärmeübergang von den Statorzähnen zum Statorjoch ( ,11KW ) 91
5.2.12 Wärmeübergang vom Statorjoch zum Luftspalt ( ,12KW ) 92
5.2.13 Wärmeübergang von den Permanentmagneten zum Luftspalt ( ,13KW ) 92
5.2.13.1 Thermisch wirksame Oberfläche 93
5.2.13.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 93
5.2.14 Wärmeübergang von den Permanentmagneten zum Rotorjoch ( ,14KW ) 95
5.2.15 Wärmeübergang vom Rotorjoch zur Welle ( ,15KW ) 97
5.2.16 Wärmeübergang von der Wicklung in der Nut zu den Statorzähnen ( ,16KW )
97

Inhaltsverzeichnis 7
5.2.17 Wärmeübergang von der Wicklung in der Nut zum Statorjoch ( ,17KW ) 98
5.2.18 Wärmeübergang von der Wicklung in der Nut zum Luftspalt ( ,18KW ) 99
5.2.18.1 Thermisch wirksame Oberfläche 100
5.2.18.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 100
5.2.19 Wärmeübergang von der Wicklung in der Nut zu den Permanentmagne-ten ( ,19KW )
101
5.2.19.1 Thermisch wirksame Oberflächen 101
5.2.19.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 102
5.2.20 Wärmeübergang vom Wickelkopf auf das Statorjoch ( ,20KW ) 102
5.2.20.1 Thermisch wirksame Oberflächen 103
5.2.20.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 104
5.2.20.3 Einstrahlzahl zwischen dem Statorjoch und der Gesamtoberfläche des Wickelkopfes
107
5.2.21 Wärmeübergang von den Statorzähnen auf den Luftspalt ( ,21KW ) 108
5.2.21.1 Thermisch wirksame Oberfläche 108
5.2.21.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 109
5.2.22 Wärmeübergang von den Statorzähnen zu den Permanentmagneten ( ,22KW )
110
5.2.22.1 Thermisch wirksame Oberflächen 110
5.2.22.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 111
5.2.23 Wärmeübergang vom Statorjoch zu den Permanentmagneten ( ,23KW ) 111
5.2.24 Wärmeübergang vom Kühlmittel im Gehäuse zur Umgebung ( ,24KW ) 112
5.2.25 Wärmeübergang vom Gehäuse zur Umgebung ( ,25KW ) 112
5.2.26 Wärmeübergang vom Kühlmittel im Gehäuse zum Gehäuse ( ,26KW )
112
5.2.27 Wärmeübergang vom Statorjoch zum Gehäuse und vom Wickelkopf zum Gehäuse ( ,27 ,28/K KW W )
113
5.2.27.1 Berechnung der Einstrahlzahlen 113
5.2.27.2 Wärmeübergangskoeffizienten und Wärmeübergangswiderstände 115
5.2.28 entfällt
5.2.29 Wärmeübergang von der Rotorwelle zur Umgebung ( ,29KW ) 117
5.2.29.1 Thermisch wirksame Oberflächen 118
5.2.29.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
118
5.2.30 Wärmeübergänge von Teilkörpern innerhalb des Gehäuses auf die Um-gebung ( ,30KW - ,36KW )
119
5.2.31 Wärmeübergang vom Rotorjoch auf das Gehäuse 119

Inhaltsverzeichnis 8
5.2.31.1 Thermisch wirksame Oberfläche 120
5.2.31.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand 120
6. Matlabprogramm zur Berechnung der Temperaturverläufe 121
6.1 Berechnung der Temperaturverläufe 121
6.2 Verlustberechnung / Schaltzeitpunkte 124
6.3 Starttemperaturen 125
6.4 Wärmeübergangswiderstände 126
6.5 Übergangsschichten bei Wärmeleitung 128
6.6 Strahlungsemissionsverhältnisse der Teilkörper 129
6.7 Eingabe und Berechnung der Wärmekapazitäten 130
6.8 Spezifische Wärmekapazitäten der Teilkörper 131
6.9 Einstrahlzahlen am Wickelkopf 132
7. Analytische Berechnung der Verlustleistungen in der Maschine 133
7.1 Stromwärmeverluste in den Wicklungen 133
7.2 Eisenverluste 135
7.2.1 Magnetische Flussdichte im betrachteten Eisenabschnitt 136
7.2.1.1 Magnetische Flussdichte im Statorzahn 136
7.2.1.2 Magnetische Flussdichte im Statorjoch 140
7.3 Eisenverlustberechnung 145
7.3.1 Vorgabe von spezifischen Verlusten getrennt nach Hystereseverlusten und Wirbelstromverlusten
145
7.3.2 Vorgabe von spezifischen Verlusten für Hysterese und Berechnung der Wirbelstromverluste
146
7.3.3 Vorgabe von spezifischen Gesamtverlusten
146
7.3.4 Vorgabe von spezifischen Verlusten getrennt nach Hystereseverlusten und Wirbelstromverlusten und Vorgabe der Exponenten für Frequenzab-hängigkeit der Wirbelströme und Flussdichteabhängigkeit
147
7.3.5 Berechnung der Eisenverluste gemäß [27] 148
7.3.6 Unterprogramm zur Berechnung der Eisenverluste 149
7.4 Reibungsverluste 150
8. Beispielrechnungen und Vergleich mit Messungen 151
8.1 Beispielrechnungen für den Modellmotor mit Gleichstromspeisung 151
8.1.1 Temperaturverläufe bei Gleichstromeinprägung ohne Rotor 152
8.1.2 Temperaturverläufe bei Gleichstromeinprägung mit Rotor 157
8.2 Beispielrechnungen für den Modellmotor mit Wechselstromspeisung und Rotation
162
9. Zusammenfassung und Ausblick 168
10. Literaturverzeichnis
169

Inhaltsverzeichnis 9
A1 Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsauf-baus
173
A1.1 Zeichnungen des Statorblechpaketes 173
A1.2 Geometrie- und Werkstoffdaten des Statorblechpaketes 175
A1.3 Geometrie- und Werkstoffdaten der Statorwicklung 178
A1.4 Geometrie- und Werkstoffdaten der Permanentmagnete 182
A1.5 Geometrie- und Werkstoffdaten des Rotorblechpaketes und der Rotor-welle
188
A1.6 Vorgabewerte und berechnete Werte der Temperatursimulation 190
A2 Berechnung des mittleren thermischen Luftspaltes einer PM-Maschine 196
A2.1 Definition des mittleren thermischen Luftspaltes 196
A2.2 Geometrische Ersatzanordnungen zur Bestimmung des mittleren thermi-schen Luftspaltes
197
A2.3 Berechnung des mittleren geometrischen Luftspaltes 200
A2.3.1 Berechnung des Ersatzwinkels *PMϕ 201
A2.3.2 Berechnung der Fläche des Kreissegments 202
A2.3.3 Berechnung der Ersatzmagnetbreite *Magnetb 202
A2.3.4 Berechnung der Winkel α und β 202
A2.3.5 Berechnung von ,g Verschiebungδ 202
A2.3.6 Berechnung der linearisierten Kreisbogenlänge a 203
A2.3.7 Berechnung der Fläche des Trapezes 203
A2.3.8 Berechnung der Fläche des Dreieckspaltes zwischen den Magnetseg-menten
203
A2.3.9 Berechnung der Gesamtfläche 204
A2.3.10 Berechnung des mittleren geometrischen Luftspaltes ,g mittelδ 204
A2.4 Berechnung des mittleren geometrischen Luftspaltes für die Maschine gemäß Anhang A1
204
A3 Messtechnische Bestimmung von Verlusten 206
A3.1 Versuchsanordnung 206
A3.2 Bestimmung von Reibverlusten und Eisenverlusten 209
A3.2.1 Reibverluste durch Wälzlager und Quecksilberspannungsübertragung 210
A3.2.2 Reibverluste durch Wälzlager, Quecksilberspannungsübertragung und Luftreibung im Luftspalt
213
A3.2.3 Reibverluste durch Wälzlager, Quecksilberspannungsübertragung, Luft-reibung im Luftspalt und Eisenverluste im Statorblech durch das Erreger-feld
214
A3.3 Separation der Einzelverlustquellen 216

Inhaltsverzeichnis 10
A3.4 Berechnung der Eisenverluste für die Maschine gemäß A1 220
A4 Verwendete Formelzeichen 223
A5 Lebenslauf

Einleitung 11
1. Einleitung
Die permanentmagneterregten Maschinen haben in den vergangenen Jahren aufgrund der
Entwicklung leistungsfähigerer Magnetwerkstoffe stark an Bedeutung gewonnen. Aufgrund
ihrer hervorragenden Eigenschaften bezüglich Wirkungsgrad, Wartungsfreiheit und Positio-
nierbarkeit werden permanentmagneterregte Maschinen nunmehr für Anwendungsgebiete mit
großen Leistungen oberhalb von 1 MW interessant. Als Beispiele seien hier Windkraftanlagen
und die Unterseeboote der Klasse 212 der Deutschen Bundesmarine genannt.
Bild 1.1: Unterseeboot der Klasse 212 der Deutschen Bundesmarine mit permanenterregtem
Antrieb
Hierdurch rückt der Aspekt der thermischen Belastbarkeit in den Fokus. Die Grenzen der
thermischen Belastbarkeit müssen bereits bei der Auslegung und Dimensionierung von Ma-
schinen beachtet und in die Berechnungsalgorithmen einbezogen werden.
In dieser Arbeit wird die analytische Berechnung der Temperaturverläufe anhand eines Mo-
dells zur Berechnung des transienten thermischen Verhaltens von permanentmagneterregten
Motoren thematisiert. Der Fokus liegt dabei auf Innenläufermotoren mit konzentrierten bzw.
verteilten Statorwicklungen und Permanentmagnetblöcken auf dem Rotor.
Schwerpunkte dieser Arbeit bilden zum einen das Aufstellen eines geeigneten Berechnungs-
algorithmus sowie zum anderen die analytische, temperaturabhängige Berechnung der einzel-

Einleitung 12
nen Netzwerkelemente. Bei der Berechnung der Wärmeübergangswiderstände wird, im Ge-
gensatz zu anderen Lösungsansätzen (siehe z.B. [37]) die Problematik des Wärmeübergangs
über den Luftspalt durch die Anwendung der Theorie des konvektiven Wärmeübergangs im
zylindrischen Ringspalt unter Einbeziehung der Nutschlitzöffnungen gelöst. Desweiteren
werden die Wärmeübergänge durch Strahlung ausgehend vom Wickelkopf sowie der Wärme-
übergang durch Strahlung über den Luftspalt einbezogen.
Zur Einbeziehung der Eisenverluste werden verschiedene etablierte Berechnungsmethoden
vorgestellt, die im Berechnungsprogramm zur Auswahl stehen. Die Wertigkeit dieser Berech-
nungsmethoden wird über eine messtechnische Bestimmung der Eisenverluste geprüft.
Die Umsetzung der Theorie in ein Simulationsprogramm auf Matlabbasis ist nicht direkter
Bestandteil dieser Dokumentation, es wird aber anhand von berechneten Verläufen sowie
Programmfenstern immer wieder Bezug auf diese praktische Umsetzung der aufgestellten
Theorie genommen. Gleiches gilt für die praktische Verifizierung des Simulationsmodells
anhand von Temperaturmessungen am im Anhang A1 beschriebenen Motor. Die praktische
Umsetzung der Temperaturmessungen ist [25] zu entnehmen. Auf die gemessenen Verläufe
wird in dieser Arbeit Bezug genommen. Sie verifizieren das aufgestellte Berechnungsmodell.
Die entwickelte Theorie der Berechnung des thermischen Verhaltens soll nicht in Konkurrenz
zu bereits verbreiteten kommerziellen Programmen zur numerischen Berechnung stehen, son-
dern diese um Vorteile und Möglichkeiten eines analytischen Formelwerks ergänzen.
Die analytische Berechnung bietet zum einen die Möglichkeit der separaten Betrachtung ein-
zelner Wärmeübergänge in der Maschine. Dies erlaubt Aussagen darüber, inwieweit bestimm-
te Wärmeübergangswiderstände berücksichtigt werden müssen oder, abhängig von der Geo-
metrie, vernachlässigt werden können.
Ein weiterer Vorteil liegt in der physikalischen Anschaulichkeit des Formelwerks, wodurch
direkte Analysen und Rückschlüsse für die Maschinendimensionierung möglich sind.
Desweiteren erlaubt die analytische Umsetzung der in dieser Arbeit vorgestellten Theorie in
ein Rechenprogramm auf Matlab-Basis die direkte Einbindung thermischer Aspekte in am
Institut bereits vorhandene Programme zur analytischen Feldberechnung und analytischen
Maschinendimensionierung, die einen Forschungsschwerpunkt am Institut darstellen.

Aufstellen eines RC-Netzwerks für die Wärmeflussberechnung 13
2. Aufstellen eines RC-Netzwerkes für die Wärmefluss-berechnung
Um die vielfältigen Wärmeübergänge in einer elektrischen Maschine einer analytischen Be-
rechnung zugänglich zu machen, ist eine Zerlegung der Maschine in Teilkörper notwendig.
Innerhalb dieser Teilkörper wird eine konstante Temperatur angenommen. Jeder Teilkörper
kann Energie speichern und tauscht über Wärmeübergangswiderstände mit anderen Teilkör-
pern Energie aus. Es sind somit Wärmeübergangswiderstände und Wärmekapazitäten zu be-
rücksichtigen. Die Verlustquellen in der Maschine werden durch Leistungsquellen modelliert.
Im Folgenden wird das auf permanentmagneterregte Maschinen spezialisierte RC-Netzwerk
abgeleitet.
2.1 Verlustquellen in der Maschine
Als Quellen im Wärmeflussmodell sind folgende Verlustarten in der Maschine zu erfassen:
- Stromwärmeverluste in den Wicklungen
- Eisenverluste im Stator
- Eisenverluste im Rotor
- Luftreibungsverluste im Luftspalt
- Verluste in den Permanentmagneten
- Reibungsverluste in den Lagern
Die Berechnung der einzelnen Verlustquellen erfolgt in Kapitel 6.
Im Folgenden werden im Netzwerk auch Verlustquellen im Kühlmittel sowie im Gehäuse
berücksichtigt, obwohl in diesen Teilkörpern keine realen Verlustquellen zu finden sind.
Diese werden für eine spätere Einbeziehung axialer Leistungsflüsse in der Maschine benö-
tigt.

Aufstellen eines RC-Netzwerks für die Wärmeflussberechnung 14
2.2 Ableiten der Netzwerkelemente aus der Einkörpernäherung
Die Theorie zum Einkörperproblem ist [1] entnommen und dort nachzulesen.
Wird in einem homogenen Körper die Verlustleistung ( ),1VP t wirksam, so wird im Zeit-
intervall 2 1t t tΔ = − die Wärmemenge ( )2
1
,1
t
Vt
P t dt∫ zugeführt.
Der Körper speichert bei einer Temperaturerhöhung von ϑΔ in der Zeit tΔ die Wärmemen-
ge wc m ϑ⋅ ⋅ Δ .
wc bezeichnet die spezifische Wärmekapazität. Sie ist eine Stoffeigenschaft.
m bezeichnet die Masse des Körpers.
Der Körper gibt entsprechend seiner Übertemperatur
Körper Uϑ ϑ ϑ= − (2.1)
die Wärmemenge ( )2
1
t
efft
O t dtα ϑ⎡ ⎤⋅ ⋅⎣ ⎦∫ an die Umgebung ab.
α ist der Wärmeübergangskoeffizient zwischen dem Körper und der Umgebung. Auf seine
Ableitung wird in späteren Kapiteln intensiv eingegangen.
effO ist die für die Wärmeabgabe maßgebliche Oberfläche des Körpers.
Eine Leistungsbilanz führt auf
( ) ( )2 2
1 1
1
t t
eff wt t
P t O t dt c mα ϑ ϑ⎡ ⎤= ⋅ ⋅ + ⋅ ⋅Δ⎣ ⎦∫ ∫ . (2.1a)
Der Grenzübergang
t dtΔ → und dϑ ϑΔ → liefert durch Polygonannäherung der unbekannten Zeitfunktion
( )1P t (in [1] nachzulesen) die Differentialgleichung
( ) ( ),11
Vw
eff eff
P tc m d tO dt O
ϑ ϑα α
⋅⋅ + =
⋅ ⋅ (2.2)

Aufstellen eines RC-Netzwerks für die Wärmeflussberechnung 15
für den Temperatur-Zeit-Verlauf.
Thermische Ersatzschaltbilder führen Methoden zur Berechnung elektrischer Netzwerke in
die Temperaturberechnung ein.
Die Analogien zwischen thermischen und elektrischen Größen können aus dem Vergleich
von (2.2) mit der DGL für den Spannungsanstieg an einer Parallelschaltung aus Kondensator
und Ohmschem Widerstand abgeleitet werden.
Bild 2.1: Elektrisches Ersatzproblem
Die Lösung der Differentialgleichung für ( )1i t für die Schaltung nach Bild 2.1 führt auf
( ) ( ) ( )1 1 1dRC u t u t R i tdt
⋅ + = ⋅ . (2.3)
Die Umformung von (2.2a)
( ) ( ) ( ) ( )11 1
weff eff
dm c t t P tO dt O
ϑ ϑα α
⎛ ⎞ ⎛ ⎞⋅ ⋅ ⋅ + = ⋅⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⋅ ⋅⎝ ⎠ ⎝ ⎠
(2.2a)
führt durch Vergleich mit (2.3) auf
( ) ( ) ( )1K K KdW C t t W P tdt
ϑ ϑ⋅ ⋅ + = ⋅ . (2.4)

Aufstellen eines RC-Netzwerks für die Wärmeflussberechnung 16
Hierbei werden die folgenden Analogien / Definitionen zugrundegelegt:
( )1
elektrische SpannungP t elektrischer Stromϑ• ↔
• ↔
1K
eff
WOα
⎛ ⎞• = ⎜ ⎟⎜ ⎟⋅⎝ ⎠
(thermischer Widerstand) (2.5)
K wC c m• = ⋅ . (Wärmekapazität) (2.6)
Im Gegensatz zur elektrischen Kapazität ist die Wärmekapazität nur gegenüber einer festzule-
genden Bezugstemperatur im Netzwerk definiert. Als Bezugstemperatur wird im Folgenden
die konstante Außentemperatur Uϑ angenommen.
2.3 Thermisches Ersatzschaltbild für die Mehrkörpernäherung
Für die Aufstellung des Ersatzschaltbildes sowie die Berechnung der Temperatur-Zeit-
Verläufe wird die Maschine in Abschnitte konstanter Temperatur eingeteilt.
Im vorliegenden Modell wird die Maschine in folgende Teilkörper eingeteilt:
- Wicklungsteile in den Nuten
- Wicklungsteile an den Stirnköpfen
- Statorjoch
- Statorzähne
- Luftspalt
- Magnete
- Rotorjoch
- Rotorwelle
- Kühlmittel innerhalb des Gehäuses
- Gehäuse/Anbauteile/Lüfter/Kühlkörper
Die folgenden Zeichnungen zeigen schematisiert den Aufbau eines Innenläufermotors mit
Permanentmagneterregung sowie die Aufteilung in Teilkörper. Bei der Stirnansicht ist als

Aufstellen eines RC-Netzwerks für die Wärmeflussberechnung 17
Beispiel die Geometrie eines Motors mit konzentrierten Wicklungen mit Zwischenzähnen
gewählt worden.
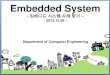
Bild 2.2: Seitenansicht des Modells für die Wärmeübergangsberechnung mit farblicher Kennzeichnung der Teilkörper des Mehrkörpermodells
Bild 2.3: Stirnansicht des Modells für die Wärmeübergangsberechnung mit farblicher Kenn-zeichnung der Teilkörper des Mehrkörpermodells (Stirnverbindungen nicht eingezeichnet)
In Schwarz ist das Gehäuse dargestellt, welches das Innere der Maschine vollständig von der
Umgebung trennt. Im Inneren des Gehäuses ist in Gelb das Kühlmittel innerhalb des Gehäu-
ses dargestellt. Dieses wird im Regelfall Luft sein. In Grün ist das Statorjoch mit den Stator-
zähnen dargestellt. Die Wicklungen in den Nuten sind in violett dargestellt. Die Wicklungen
an den Stirnköpfen (ebenfalls violett) sind als separater Teilkörper zu betrachten. Auf dem
Rotoreisen (helles Lila) sind die Permanentmagnete angeordnet.

Aufstellen eines RC-Netzwerks für die Wärmeflussberechnung 18
Die Möglichkeit des direkten Kontaktes zwischen Statorjoch und Gehäuse wird schematisch
durch die roten Stege dargestellt. Diese stellen keinen eigenen Teilkörper da, sondern sind
zum Gehäuse zu zählen.
Der Flächenanteil des direkten Kontaktes zwischen Statorjoch und Gehäuse ist im Programm
als prozentualer Anteil an der Zylindermantelfläche des Stators als Eingabewert vorgesehen,
da die Ausführungsformen vielfältig sind. Der Einfluss dieser Stege auf Konvektion und
Strahlung wird vernachlässigt.
Die Möglichkeit, dass kein Gehäuse vorhanden ist, ist als Spezialfall des obigen Modells er-
fasst (siehe die entsprechenden Unterkapitel des Kapitels 5.
Die Möglichkeit, dass ein Motor ohne Rotor behandelt wird, ist als Spezialfall des obigen
Modells erfasst.
Ein direkter Stoffaustausch zwischen Kühlmittel im Gehäuse (bisher nur Luft vorgesehen,
aber Erweiterung auf allgemeine Kühlmittel möglich) und der Außenluft ist bisher nicht im-
plementiert, stellt aber eine mögliche Erweiterung des Modells dar.
Die Wärmeabfuhr durch einen Kühlkreislauf ist über die Anpassung der Leistungsbilanz für
den gekühlten Teilkörper mit in das Modell einbeziehbar. Diese Möglichkeit ist im Programm
bisher nicht implementiert, stellt aber eine mögliche Erweiterung des Modells dar.
Der erzwungene Stoffaustausch zwischen Kühlmittel im Gehäuse und der Außenluft durch
einen aktiven Lüfter ist aufgrund der erzwungenen Konvektion im Gehäuse und der sich dar-
aus ergebenen Strömungsverhältnisse schwer einzubeziehen. Die Strömungsverhältnisse sind
dann analytisch nicht mehr zu erfassen.
Bei der International Conference On Electrical Machines im Jahr 2006 vorgestellte analyti-
sche Modelle für die Wärmeflussberechnung schließen aus diesem Grunde die aktive Belüf-
tung aus.
Für jeden Teilkörper sind die Wärmekapazität gegenüber einer festzulegenden Bezugstempe-
ratur sowie die Wärmeübergangswiderstande zu anderen Teilkörpern zu bestimmen.
Der Aufbau des Innenläufermotors führt damit auf das folgende thermische Ersatzschaltbild:

Aufstellen eines RC-Netzwerks für die Wärmeflussberechnung 19
WK30
CK,Cu,Nut
P1
WK31
CK,Cu,Stirn
P2
WK32
CK,St,Zahn
P3
WK33
CK,St,Joch
P4
WK34
CK
P5
WK35
CK,PM
P6
WK36
CK,R,Joch
P7
WK29
CK,Welle
P8
WK24
CK,Kühl
P9
WK25
CK,G
P10
PCu,Nut
PCu,Stirn
PSt, Zahn
PSt, Joch
PPM
PR,Joch
PWelle
WK9
P1,2
WK10
P2,3
WK11
P3,4
WK12
P4,5
WK13
P5,6
WK14
P6,7
WK15
P7,8
WK8
P8,9
WK26
P9,10
P1,9
WK1
WK2
P2,9
WK3
P3,9
WK4
P4,9
WK5
P5,9
WK6
P6,9
WK7
P7,9
P1,3
WK16
P1,4
WK17
P1,5
WK18
P1,6
WK19
P2,4
WK20
P3,5
WK21
P3,6
WK22
P4,6
WK23
P4,10
WK27
P2,10
WK28
,Cu Nutϑ
,Cu Stirnϑ
,St Zahnϑ
,St Jochϑ
δϑ
PMϑ
,R Jochϑ
Welleϑ
Gϑ
Kϑ
Uϑ
P
PK
PG
WK37
P7,10
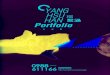
Bild 2.4: Thermisches RC-Netzwerk für einen permanentmagneterregten
Innenläufermotor

Aufstellen eines RC-Netzwerks für die Wärmeflussberechnung 20
Die folgende Tabelle beschreibt die Elemente des Netzwerks:
,CU NutP Stromwärmeverluste in den Wicklungen innerhalb der Nutung und axial
zugeführte Leistung
,CU StirnP Stromwärmeverluste in den Wicklungen an den Wickelköpfen und axial
zugeführte Leistung
,St ZahnP Eisenverluste in den Statorzähnen und axial zugeführte Leistung
,St JochP Eisenverluste im Statorjoch und axial zugeführte Leistung
Pδ Luftreibungsverluste im Luftspalt
PMP Verluste in den Permanentmagneten und axial zugeführte Leistung
,R JochP Eisenverluste im Rotorjoch und axial zugeführte Leistung
WelleP Reibungsverluste in den Lagern und axial zugeführte Leistung
KühlP
Verluste im Kühlmittel; Im Kühlmittel gibt es real keine Ver-
lustquellen. Die Annahme von Verlustquellen innerhalb des Kühlmittels
ist für die Einbeziehung des axialen Leistungsflusses sowie bei Annah-
me eines externen Kühlkreislaufes notwendig.
GP Verluste im Gehäuse; Im Gehäuse gibt es real keine Verlustquellen. Die
Annahme von Verlustquellen innerhalb des Luftspaltes ist für die Einbe-
ziehung des axialen Leistungsflusses notwendig.
KW 1 Wärmeübergangswiderstand der Wicklung in der Nut zum Kühlmittel
KW 2 Wärmeübergangswiderstand der Wicklung am Wickelkopf zum Kühl-
mittel
KW 3 Wärmeübergangswiderstand des Eisens der Statorzähne zum Kühlmittel
KW 4 Wärmeübergangswiderstand des Statorjoches zum Kühlmittel
KW 5 Wärmeübergangswiderstand der Luft im Luftspalt zum Kühlmittel
KW 6 Wärmeübergangswiderstand der Permanentmagneten zum Kühlmittel
KW 7 Wärmeübergangswiderstand des Rotorjoches zum Kühlmittel
KW 8 Wärmeübergangswiderstand der Rotorwelle zum Kühlmittel
KW 9 Wärmeübergangswiderstand zwischen Wicklung in der Nut und Wick-

Aufstellen eines RC-Netzwerks für die Wärmeflussberechnung 21
lung an den Wickelköpfen
KW 10 Wärmeübergangswiderstand zwischen der Wicklung am Wickelkopf
und den Statorzähnen
KW 11 Wärmeübergangswiderstand zwischen Statorzähnen und Statorjoch
KW 12 Wärmeübergangswiderstand zwischen Statorjoch und Luft im Luftspalt
KW 13 Wärmeübergangswiderstand zwischen Luft im Luftspalt und den Per-
manentmagneten
KW 14 Wärmeübergangswiderstand zwischen den Permanentmagneten und
dem Rotorjoch
KW 15 Wärmeübergangswiderstand zwischen Rotorjoch und Welle
KW 16 Wärmeübergangswiderstand zwischen der Wicklung in der Nut und den
Statorzähnen
KW 17 Wärmeübergangswiderstand zwischen der Wicklung in der Nut und dem
Statoreisen
KW 18 Wärmeübergangswiderstand zwischen der Wicklung in der Nut und der
Luft im Luftspalt
KW 19 Wärmeübergangswiderstand zwischen der Wicklung in der Nut und den
Permanentmagneten
KW 20 Wärmeübergangswiderstand zwischen der Wicklung am Stirnkopf und
dem Statorjoch
KW 21 Wärmeübergangswiderstand zwischen den Statorzähnen und der Luft im
Luftspalt
KW 22 Wärmeübergangswiderstand zwischen den Statorzähnen und den Per-
manentmagneten
KW 23 Wärmeübergangswiderstand zwischen dem Statorjoch und den Perma-
nentmagneten
KW 24 Wärmeübergangswiderstand zwischen dem Kühlmittel im Gehäuse und
der Umgebung
KW 25 Wärmeübergangswiderstand zwischen dem Gehäuse und der Umgebung
KW 26 Wärmeübergangswiderstand zwischen dem Kühlmittel und dem Gehäu-
se
KW 30 Wärmeübergangswiderstand vom Kupfer in der Nut zur Umgebung

Aufstellen eines RC-Netzwerks für die Wärmeflussberechnung 22
KW 31 Wärmeübergangswiderstand vom Kupfer am Stirnkopf zur Umgebung
KW 32 Wärmeübergangswiderstand von den Statorzähnen zur Umgebung
KW 33 Wärmeübergangswiderstand vom Statorjoch zur Umgebung
KW 34 Wärmeübergangswiderstand vom Luftspalt zur Umgebung
KW 35 Wärmeübergangswiderstand von den Permanentmagneten zur Umge-
bung
KW 36 Wärmeübergangswiderstand vom Rotorjoch zur Umgebung
KW 37 Wärmeübergangswiderstand vom Rotorjoch zum Gehäuse
, ,K CU NutC Wärmekapazität der Wicklungen innerhalb der Nut
, ,K CU StirnC Wärmekapazität der Wicklungen am Stirnkopf
, ,K Fe ZahnC Wärmekapazität der Statorzähne
, ,K Fe StC Wärmekapazität des Statorjoches
,KC δ Wärmekapazität der Luft im Luftspalt
,K PMC Wärmekapazität der Permanentmagnete
, ,K Fe RC Wärmekapazität des Rotorjoches
,K WelleC Wärmekapazität der Rotorwelle
,K KühlC Wärmekapazität des Kühlmittels
,K GC Wärmekapazität des Gehäuses
Tabelle 2.1: Netzwerkelemente des Modells und ihre Bezeichnungen

Lösung des DGL-Systems für das Wärmeflussnetzwerk 23
3. DGL-System für das Wärmeflussnetzwerk und dessen Lösung
Im Folgenden wird aus Gründen der Übersichtlichkeit auf die Kennzeichnung von zeitabhän-
gigen Größen als solche weitgehend verzichtet.
3.1 Knotenpunktgleichungen
Der Ansatz zur Lösung erfolgt über die Leistungssumme, die für jeden Knoten gebildet wird.
Hierbei wird von beliebiger Zeitabhängigkeit der Leistungen ausgegangen.
Knoten 1 ( ,Cu Nutϑ ):
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ), 16 15 14 13 12 19 1 0Cu NutP t P t P t P t P t P t P t P t− − − − − − − = (3.1)
Knoten 2 ( ,Cu Stirnϑ ):
( ) ( ) ( ) ( ) ( ) ( ), 24 23 12 2,9 2,10 2 0Cu StirnP t P t P t P t P t P P t− − + − − − = (3.2)
Knoten 3 ( ,St Zahnϑ ):
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ), 36 35 13 34 39 23 3 0St ZahnP t P t P t P t P t P t P t P t− − + − − + − = (3.3)
Knoten 4 ( ,St Jochϑ ):
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ), 4,10 46 24 14 4,9 34 45 4 0St JochP t P t P t P t P t P t P t P t P t− − + + − + − − = (3.4)
Knoten 5 ( δϑ ):
( ) ( ) ( ) ( ) ( )35 15 45 56 5 0P t P t P t P t P t+ + − − = (3.5)
Knoten 6 ( PMϑ ):
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )46 36 16 56 67 6,9 6 0PMP t P t P t P t P t P t P t P t+ + + + − − − = (3.6)

Lösung des DGL-Systems für das Wärmeflussnetzwerk 24
Knoten 7 ( ,R Jochϑ ):
( ) ( ) ( ) ( ) ( ), 79 67 78 7,10 7 0Fe RP t P t P t P t P P t− + − − − = (3.7)
Knoten 8 ( Welleϑ ):
( ) ( ) ( ) ( )78 8,9 8 0WelleP t P t P t P t+ − − = (3.8)
Knoten 9 ( Kϑ ):
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1,9 2,9 3,9 4,9 5,9 6,9 7,9 8,9 9,10 9 0P t P t P t P t P t P t P t P t P t P t+ + + + + + + − − =
(3.9)
Knoten 10 ( Gϑ ):
( ) ( ) ( ) ( )4,10 2,10 7,10 9,10 10 0P t P t P P t P t+ + + − = (3.10)
3.2 Lösung der Temperaturverlaufs-DGL für den homogenen Teilkörper
Ausgegangen wird von der DGL nach (2.4).
( ) ( )K K KdW C t t W Pdt
ϑ ϑ⋅ ⋅ + = ⋅ (2.4)
mit der zeitunabhängigen Störfunktion P .
Der Lösungsansatz für diese DGL erster Ordnung mit konstanten Koeffizienten führt auf
( ) 0 1K K K K
t tW C W C
Kt e P W eϑ ϑ− −
⋅ ⋅⎛ ⎞
= ⋅ + ⋅ ⋅ −⎜ ⎟⎜ ⎟⎝ ⎠
(3.12)
mit
KW Pϑ∞ = ⋅ (3.13)
1K
K K
TW C
=⋅
. (3.14)

Lösung des DGL-Systems für das Wärmeflussnetzwerk 25
Die Lösung der DGL (2.4) nach (3.12) gilt nur für den Fall, dass P, WK und CK nicht zeitab-
hängig sind. Im Allgemeinen werden aber sowohl die Leistungen im Netzwerk als auch die
Netzwerkgrößen von den Knotenpunkttemperaturen abhängen und somit auch von der Zeit.
Gleichung (3.12) ist daher nur in einem hinreichend kleinen Zeitintervall tΔ gültig, in dem
mit konstanten Werten für P , KW und KC gerechnet werden darf.
Diese Einschränkung ist notwendig, da für ( )P t , ( )KW t und ( )KC t beliebige Zeitabhängig-
keiten zugelassen werden müssen und somit eine analytische Lösung von (2.4) im gesamten
Zeitbereich nicht möglich ist.
Die Intervallgrenzen werden berechnet gemäß
( )1t tν ν= − ⋅ Δ (3.15)
mit
1t t tν ν+Δ = − . (3.16)
Bild 3.1 zeigt den Berechnungsalgorithmus.
Pi,ν
Ci,ν
Wi,ν
ν ν+1 ν+2 Intervallzählung
Intervallgrenzenttν+2tν+1tν
f( (tϑ ))i ν
f( (tϑ ))i ν+1
f( (tϑ ))i ν+2
t
t
ϑi,ν
Start-werte
Endtemperaturen im Zeitintervallwerden als Lösung eines Gleich-ungssystems berechnet
f(P(t Ci ν), )i i(t W(tν ν), )
f(P(t Ci ν+1), )i i(t W(tν+1 ν+1), )
f(P(t Ci ν+2), )i i(t W(tν+2 ν+2), )
Bild 3.1: Ablauf des Berechnungsalgorithmus zur Bestimmung der Temperaturverläufe im Wärmeflussnetzwerk

Lösung des DGL-Systems für das Wärmeflussnetzwerk 26
Aus Gleichung (3.12) folgt jetzt die Temperatur im Intervall ν mit der Anfangs-
übertemperatur ( )tνϑ gemäß (3.14).
( ) ( ) ( ) ( ) ( )1K K
t t t tT t T t
Kt e P t W t eν ν
ν νν ν ν νϑ ϑ
− −− −⎛ ⎞
⎜ ⎟= ⋅ + ⋅ ⋅ −⎜ ⎟⎝ ⎠
(3.17a)
( ) ( ) ( ) ( ) ( ) ( )1 1K K
t tT t T t
Kt t e P t W t eν νν ν ν ν νϑ ϑ
Δ Δ− −
+
⎛ ⎞= ⋅ + ⋅ ⋅ −⎜ ⎟
⎜ ⎟⎝ ⎠
(3.17b)
In der weiteren Berechnung sind alle Größen als zeitabhängige Größen anzusehen. Auf die
Indizierung der Zeitabhängigkeit wird aus Gründen der Übersichtlichkeit weitgehend verzich-
tet.
3.3 Aufstellen der Lösungsmatrix
In den Gleichungen (3.1) bis (3.10) sind die Übertemperaturen im Berechnungsintervall bis-
her durch Leistungssummen ausgedrückt.
Um die Annahme konstanter Leistungen im Netzwerk im Berechnungsintervall zu realisieren,
sind die Leistungsflüsse über die Koppelwiderstände zwischen zwei RC-Teilkörpern für jedes
Berechnungsintervall mittels der Teilkörpertemperaturen zu Beginn des Berechnungsinter-
valls zu berechnen. Die praktische Umsetzung dieses Berechnungsalgorithmus zeigte aller-
dings, dass dieses Vorgehen zu Instabilitäten bei der Berechnung der Temperaturverläufe
führt, insbesondere dann, wenn Elemente des Netzwerks gegen unendlich bzw. gegen Null
gehen. Diese Instabilitäten treten auch für sehr kleine Werte des Berechnungsintervalls tΔ
auf.
Um eine stabile Berechnung der Temperaturverläufe für beliebige Parameterkombinationen
gewährleisten zu können, werden die Leistungsflüsse über die Koppelwiderstände tempera-
turabhängig in die DGL (3.12) eingesetzt. Durch dieses Vorgehen wird der Gültigkeitsbereich
der DGL verlassen. Die praktische Umsetzung zeigt allerdings die Gültigkeit dieser Näherung
für die in einer elektrischen Maschine vorkommenden Parameterkombinationen bei hinrei-
chend kleinen Werten für die Intervallänge tΔ .

Lösung des DGL-Systems für das Wärmeflussnetzwerk 27
Näheres hierzu ist Kapitel 6.1 zu entnehmen. Die praktische Umsetzung zeigt außerdem einen
stabilen Berechnungsverlauf für beliebige Parameterkombinationen. Deshalb wird im Weite-
ren dieser Weg einer mathematischen Näherung gewählt.
Die Leistungsflüsse über die Koppelwiderstände zwischen den RC-Teilkörpern werden somit
im Folgenden durch die Temperaturen im Netzwerk sowie durch die Netzwerkelemente aus-
gedrückt.
Aus Gründen der Übersichtlichkeit wird auf die Intervallindizierung in den Gleichungen ver-
zichtet. Sie ist analog zu Gleichung (3.13) gültig.

Lösung des DGL-Systems für das Wärmeflussnetzwerk 28
, , , , , , , , ,30 30 30 1, , ,0 , 30
19 18 17 16 9 1
1K K K K
t tCU Nut PM CU Nut CU Nut Fe St CU Nut Fe Zahn CU Nut Cu Stirn CU Nut KW C W C
CU Nut Cu Nut CU Nut KK K K K K K
e P W eW W W W W W
δϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑϑ ϑ
Δ Δ− −
⋅ ⋅⎛ ⎞− − − − − −⎛ ⎞
= ⋅ + − − − − − − ⋅ ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(3.18)
, , , , , , , ,31 2 31 2, , ,0 , 31
20 10 28 2 9
1K K K K
t tCU Stirn Fe St CU Stirn Fe Zahn CU Stirn G CU Stirn K CU Nut Cu StirnW C W C
CU Stirn Cu Stirn CU Stirn KK K K K K
e P W eW W W W W
ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑϑ ϑ
Δ Δ− −
⋅ ⋅⎛ ⎞− − − − −⎛ ⎞
= ⋅ + − − − − + ⋅ ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(3.19)
, , , , , , , , ,32 3 32 3, , ,0 , 32
22 21 16 11 3 10
1K K K K
t tSt Zahn PM St Zahn CU Nut St Zahn St Zahn St JOch St Zahn K CU Stirn St ZahnW C W C
St Zahn St Zahn St Zahn KK K K K K K
e P W eW W W W W W
δϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑϑ ϑ
Δ Δ− −
⋅ ⋅⎛ ⎞− − − − − −⎛ ⎞
= ⋅ + − − + − − + ⋅ ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(3.20)
, , , , , , , , , ,33 4 33 4, , ,0 , 33
27 23 20 17 11 12 4
1K K K K
t tSt Joch G St Joch PM CU Stirn St Joch CU Nut St Joch St Zahn St Joch St Joch St Joch KW C W C
St Joch St Joch St Joch KK K K K K K K
e P W eW W W W W W W
δϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑϑ ϑ
Δ Δ− −
⋅ ⋅⎛− − − − − − −⎛ ⎞
= ⋅ + − − + + + − − ⋅ ⋅ −⎜⎜ ⎟⎝ ⎠ ⎝
⎞⎟⎜ ⎟⎠
(3.21)
, , ,34 5 34 5,0 34
21 18 12 13 5
1K K K K
t tSt Zahn CU Nut St JochW C W CPM K
KK K K K K
e P W eW W W W W
δ δ δ δ δδ δ δ
ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑϑ ϑΔ Δ
− −⋅ ⋅
⎛ ⎞− − −⎛ ⎞− −= ⋅ + + + + − − ⋅ ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(3.22)

Lösung des DGL-Systems für das Wärmeflussnetzwerk 29
, , , ,35 6 35 6,0 35
23 22 19 13 14 6
1K K K K
t tSt Joch PM St Zahn PM CU Nut PM PM R JochW C W CPM PM K
PM PM PM KK K K K K K
e P W eW W W W W W
δϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑϑ ϑ ϑ ϑϑ ϑΔ Δ
− −⋅ ⋅
⎛ ⎞− − − −⎛ ⎞− −= ⋅ + + + + + − − ⋅ ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(3.23)
, , , ,36 7 36 7, , ,0 , 36
14 37 15 7
1K K K K
t tPM R Joch R Joch G R Joch Welle R Joch KW C W C
R Joch Fe R R Joch KK K K K
e P W eW W W W
ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑϑ ϑ
Δ Δ− −
⋅ ⋅⎛ ⎞− − − −⎛ ⎞
= ⋅ + + − − − ⋅ ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.24)
, ,29 8 29 8,0 29
15 8
1K K K K
t tR Joch Welle R Joch KW C W C
Welle Welle Welle KK K
e P W eW W
ϑ ϑ ϑ ϑϑ ϑ
Δ Δ− −
⋅ ⋅⎛ ⎞− −⎛ ⎞
= ⋅ + + − ⋅ ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.25)
, , , , ,24 9 24 9,0 24
1 2 3 4 5 6 7 8 26
1K K K K
t tCu Nut K Cu Stirn K St Zahn K St Joch K R Joch KW C W CK Welle K K GPM K
K K K KK K K K K K K K K
e P W eW W W W W W W W W
δϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑϑ ϑ ϑ ϑ ϑ ϑϑ ϑϑ ϑΔ Δ
− −⋅ ⋅
⎛ ⎞− − − − −⎛ ⎞− − −−= ⋅ + + + + + + + + + − ⋅ ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(3.26)
, , ,25 10 25 10,0 25
27 28 37 26
1K K K K
t tSt Joch G Cu Stirn G R Joch GW C W CK G
G G G KK K K K
e P W eW W W W
ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑϑ ϑΔ Δ
− −⋅ ⋅
⎛ ⎞− − −⎛ ⎞−= ⋅ + + + + + ⋅ ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(3.27)

Lösung des DGL-Systems für das Wärmeflussnetzwerk 30
Die elementare Umformung der Gleichungen (3.14) bis (3.21) führt auf folgendes Glei-
chungssystem:
30 1 30 1, ,0 , 30
31 31 31, ,0 , 31
,
,
,
,
,
1
1
K K K K
K K K
t tW C W C
CU Nut CU Nut K
t tW C W C
CU Stirn CU Stirn K
CU Nut
CU Stirn
St Zahn
St Joch
PM
R Joch
Welle
K
G
e P W e
e P W e
A δ
ϑ
ϑ
ϑϑϑϑ
ϑϑ
ϑϑϑϑ
Δ Δ− −
⋅ ⋅
Δ Δ− −
⋅ ⋅
⎛ ⎞⋅ + ⋅ ⋅ −⎜ ⎟⎜ ⎟
⎝ ⎠
⋅ + ⋅ ⋅ −
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
⋅ =⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
2
32 3 32 3, ,0 , 32
33 4 33 4, ,0 , 33
34 5 34 5,0 34
35 6,0
1
1
1
K
K K K K
K K K K
K K K K
K K
t tW C W C
St Zahn St Zahn K
t tW C W C
St Joch St Joch K
t tW C W C
K
tW C
PM PM
e P W e
e P W e
e P W e
e P
δ δ
ϑ
ϑ
ϑ
ϑ
Δ Δ− −
⋅ ⋅
Δ Δ− −
⋅ ⋅
Δ Δ− −
⋅ ⋅
Δ−
⋅
⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
⎛ ⎞⋅ + ⋅ ⋅ −⎜ ⎟⎜ ⎟
⎝ ⎠⎛ ⎞
⋅ + ⋅ ⋅ −⎜ ⎟⎜ ⎟⎝ ⎠
⎛ ⎞⋅ + ⋅ ⋅ −⎜ ⎟⎜ ⎟
⎝ ⎠
⋅ + 35 635
36 7 36 7, ,0 , 36
29 8 29 8,0 29
24 9 24 9,0 24
,0
1
1
1
1
K K
K K K K
K K K K
K K K K
tW C
K
t tW C W C
R Joch R Joch K
t tW C W C
Welle Welle K
t tW C W C
K K K
tW
G
W e
e P W e
e P W e
e P W e
e
ϑ
ϑ
ϑ
ϑ
Δ−
⋅
Δ Δ− −
⋅ ⋅
Δ Δ− −
⋅ ⋅
Δ Δ− −
⋅ ⋅
Δ−
⎛ ⎞⋅ ⋅ −⎜ ⎟⎜ ⎟
⎝ ⎠⎛ ⎞
⋅ + ⋅ ⋅ −⎜ ⎟⎜ ⎟⎝ ⎠
⎛ ⎞⋅ + ⋅ ⋅ −⎜ ⎟⎜ ⎟
⎝ ⎠⎛ ⎞
⋅ + ⋅ ⋅ −⎜ ⎟⎜ ⎟⎝ ⎠
⋅ 25 10 25 1025 1K K K K
tC W C
G KP W eΔ
−⋅ ⋅
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎛ ⎞⎢ ⎥+ ⋅ ⋅ −⎜ ⎟⎢ ⎥⎜ ⎟
⎝ ⎠⎣ ⎦
(3.28)
mit

Lösung des DGL-Systems für das Wärmeflussnetzwerk 31
1 2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 9 10
1 2 3 4
a a a a a a a a a ab b b b b b b b b bc c c c c c c c c cd d d d d d d d d de e e e e e e e e e
Af f f f f f f f f fg g g g g g g g g gh h h h h h h h h hi i i i i i i i i ij j j j j
=
5 6 7 8 9 10j j j j j
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(3.29)
mit
30 130 30 30 30 30 301
19 18 17 16 9 1
1 1 K K
tW CK K K K K K
K K K K K K
W W W W W Wa eW W W W W W
Δ−
⋅⎛ ⎞⎛ ⎞
= + + + + + + ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.30)
30 1302
9
1 K K
tW CK
K
Wa eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.31)
30 1303
16
1 K K
tW CK
K
Wa eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.32)
30 1304
17
1 K K
tW CK
K
Wa eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.33)
30 1305
18
1 K K
tW CK
K
Wa eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.34)
30 1306
19
1 K K
tW CK
K
Wa eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.35)
7 0a = (3.36)
8 0a = (3.37)
30 1309
1
1 K K
tW CK
K
Wa eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.38)
10 0a = (3.39)

Lösung des DGL-Systems für das Wärmeflussnetzwerk 32
31 2311
9
1 K K
tW CK
K
Wb eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.40)
31 231 31 31 31 312
20 10 28 9 2
1 1 K K
tW CK K K K K
K K K K K
W W W W Wb eW W W W W
Δ−
⋅⎛ ⎞⎛ ⎞
= + + + + + ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.41)
31 223
10
1 K K
tW CK
K
Wb eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.42)
31 224
20
1 K K
tW CK
K
Wb eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.43)
5 0b = (3.44)
6 0b = (3.45)
7 0b = (3.46)
8 0b = (3.47)
31 2319
2
1 K K
tW CK
K
Wb eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.48)
31 23110
28
1 K K
tW CK
K
Wb eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.49)
32 3321
16
1 K K
tW CK
K
Wc eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.50)
32 332
10
1 K K
tW CK
K
Wc eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.51)
32 332 32 32 32 32 323
22 21 16 11 10 3
1 1 K K
tW CK K K K K K
K K K K K K
W W W W W Wc eW W W W W W
Δ−
⋅⎛ ⎞⎛ ⎞
= + + + + + + ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.52)
32 3324
11
1 K K
tW CK
K
Wc eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.53)
32 3325
21
1 K K
tW CK
K
Wc eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.54)

Lösung des DGL-Systems für das Wärmeflussnetzwerk 33
32 3326
22
1 K K
tW CK
K
Wc eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.55)
7 0c = (3.56)
8 0c = (3.57)
32 3329
3
1 K K
tW CK
K
Wc eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.58)
10 0c = (3.59)
33 4331
17
1 K K
tW CK
K
Wd eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.60)
33 4332
20
1 K K
tW CK
K
Wd eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.61)
33 4333
11
1 K K
tW CK
K
Wd eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.62)
33 433 33 33 33 33 33 334
27 23 20 4 17 11 12
1 1 K K
tW CK K K K K K K
K K K K K K K
W W W W W W Wd eW W W W W W W
Δ−
⋅⎛ ⎞⎛ ⎞
= + + + + + + + ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.63)
33 4335
12
1 K K
tW CK
K
Wd eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.64)
33 4336
23
1 K K
tW CK
K
Wd eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.65)
7 0d = (3.66)
8 0d = (3.67)
33 4339
4
1 K K
tW CK
K
Wd eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.68)
33 43310
27
1 K K
tW CK
K
Wd eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.69)

Lösung des DGL-Systems für das Wärmeflussnetzwerk 34
34 5341
18
1 K K
tW CK
K
We eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.70)
2 0e = (3.71)
34 5343
21
1 K K
tW CK
K
We eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.72)
34 5344
12
1 K K
tW CK
K
We eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.73)
34 534 34 34 34 345
5 21 18 12 13
1 1 K K
tW CK K K K K
K K K K K
W W W W We eW W W W W
Δ−
⋅⎛ ⎞⎛ ⎞
= + + + + + ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.74)
34 5346
13
1 K K
tW CK
K
We eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.75)
7 0e = (3.76)
8 0e = (3.77)
34 5349
5
1 K K
tW CK
K
We eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.78)
10 0e = (3.79)
35 6351
19
1 K K
tW CK
K
Wf eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.80)
2 0f = (3.81)
35 6353
22
1 K K
tW CK
K
Wf eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.82)
35 6354
23
1 K K
tW CK
K
Wf eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.83)
35 6355
13
1 K K
tW CK
K
Wf eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.84)

Lösung des DGL-Systems für das Wärmeflussnetzwerk 35
35 635 35 35 35 35 356
6 23 22 19 13 14
1 1 K K
tW CK K K K K K
K K K K K K
W W W W W Wf eW W W W W W
Δ−
⋅⎛ ⎞⎛ ⎞
= + + + + + + ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.85)
35 6357
14
1 K K
tW CK
K
Wf eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.86)
8 0f = (3.87)
35 6359
6
1 K K
tW CK
K
Wf eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.88)
10 0f = (3.89)
1 0g = (3.90)
2 0g = (3.91)
3 0g = (3.92)
4 0g = (3.93)
5 0g =
36 7366
14
1 K K
tW CK
K
Wg eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.94)
36 736 36 367
7 14 15
1 1 K K
tW CK K K
K K K
W W Wg eW W W
Δ−
⋅⎛ ⎞⎛ ⎞
= + + + ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.95)
36 7368
15
1 K K
tW CK
K
Wg eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.96)
36 7369
7
1 K K
tW CK
K
Wg eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.97)
36 73610
37
1 K K
tW CK
K
Wg eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.98)
1 0h = (3.99)
2 0h = (3.100)

Lösung des DGL-Systems für das Wärmeflussnetzwerk 36
3 0h = (3.101)
4 0h = (3.102)
5 0h = (3.103)
6 0h =
29 8297
15
1 K K
tW CK
K
Wh eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.104)
29 829 298
15 8
1 1 K K
tW CK K
K K
W Wh eW W
Δ−
⋅⎛ ⎞⎛ ⎞
= + + ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ . (3.105)
29 8299
8
1 K K
tW CK
K
Wh eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ . (3.106)
10 0h = (3.107)
24 9241
1
1 K K
tW CK
K
Wi eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.108)
24 9242
2
1 K K
tW CK
K
Wi eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.109)
24 9243
3
1 K K
tW CK
K
Wi eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.110)
24 9244
4
1 K K
tW CK
K
Wi eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.111)
24 9245
5
1 K K
tW CK
K
Wi eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.112)
24 9246
6
1 K K
tW CK
K
Wi eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.113)
24 9247
7
1 K K
tW CK
K
Wi eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.114)

Lösung des DGL-Systems für das Wärmeflussnetzwerk 37
24 9248
8
1 K K
tW CK
K
Wi eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.115)
24 924 24 24 24 24 24 24 24 249
1 2 3 4 5 6 7 8 26
1 1 K K
tW CK K K K K K K K K
K K K K K K K K K
W W W W W W W W Wi eW W W W W W W W W
Δ−
⋅⎛ ⎞⎛ ⎞
= + + + + + + + + + ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ .
(3.116)
24 92410
26
1 K K
tW CK
K
Wi eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.117)
1 0j = (3.118)
25 10252
28
1 K K
tW CK
K
Wj eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.119)
3 0j = (3.120)
25 10254
27
1 K K
tW CK
K
Wj eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.121)
5 0j = (3.122)
6 0j = (3.123)
25 10257
37
1 K K
tW CK
K
Wj eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.124)
8 0j = (3.125)
25 10259
26
1 K K
tW CK
K
Wj eW
Δ−
⋅⎛ ⎞⎛ ⎞
= − ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.126)
25 1025 25 2510
26 27 28
1 1 K K
tW CK K K
K K K
W W Wj eW W W
Δ−
⋅⎛ ⎞⎛ ⎞
= + + + ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ (3.127)
Die Lösung des Gleichungssystems erfolgt durch ein Matlabprogramm. Dieses löst (3.24) für
jedes Zeitintervall tΔ und stellt die Temperaturverläufe über der Zeit dar.

Analytische Bestimmung der Wärmekapazitäten 38
4. Analytische Bestimmung der Wärmekapazitäten
Gemäß dem vorstehend aufgestellten Berechnungsmodell haben die Wärmekapazitäten der
Teilkörper entscheidenden Einfluss auf die Zeitverläufe der Temperaturen in der Maschine.
Die Wärmekapazitäten der Teilkörper können wahlweise als fester temperaturunabhängiger
Wert im Programm eingegeben werden oder automatisch während des Berechnungszyklus
bestimmt werden.
Es wird von einer konstanten Temperatur innerhalb eines Teilkörpers ausgegangen.
Unter Vorgabe der temperaturabhängigen spezifischen Wärmkapazität ( ),p ic ϑ des Werk-
stoffs berechnet sich die Wärmekapazität des Teilkörpers i gemäß (2.6) mit
( ) ( ),p i iiC c mϑ ϑ= ⋅ . (2.6)
Zu bestimmen ist zunächst die Masse im des Teilkörpers. Dies erfolgt über die Berechnung
aus vorliegenden Geometriedaten sowie Werkstoffdaten, die Vorgabewert sind. Die Berech-
nung der Massen der Teilkörper ist dem Unterkapitel 4.2 zu entnehmen.
4.1 Spezifische Wärmekapazitäten der Teilkörper
Die spezifische Wärmekapazität der Teilkörper ist material- und temperaturabhängig. Sie
wird angegeben in der Einheit Jkg K⋅
.
In [3] Abschnitt DEA 4 sind für viele Stoffe die spezifischen Wärmekapazitäten für unter-
schiedliche Temperaturen aufgelistet. Die Eingabe im Programm erfolgt über die Eingabe-
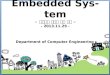
maske gemäß Bild 4.1.

Analytische Bestimmung der Wärmekapazitäten 39
Bild 4.1: Eingabe der temperaturabhängigen spezifischen Wärmekapazitäten
im Berechnungsprogramm
Für die temperaturabhängige Bestimmung der Wärmekapazitäten im Intervall tΔ wird zwi-
schen den eingegebenen Wertepaaren linear interpoliert.
4.1.1 Spezifische Wärmekapazität im Luftspalt gδ
Die Berechnung der Wärmekapazität der Luft im Luftspalt ist durch den Stoffaustausch zwi-
schen Luft im Luftspalt und Außenluft problematisch. In [3] Abschnitt DB 15 sind für die
spezifische Wärmekapazität von trockener Luft folgende Werte aufgelistet:
0°C 1,006 JKg K⋅
200°C 1,026 JKg K⋅

Analytische Bestimmung der Wärmekapazitäten 40
Der Vergleich mit den spezifischen Wärmekapazitäten der anderen Teilkörper sowie die Be-
rücksichtigung der geringen spezifischen Dichte von Luft, die auf ein sehr geringes Gewicht
führt, erlauben somit die Annahme
( ) 0Cδ δϑ ≈ . (4.1)
Bei Berücksichtigung von erzwungener Strömung im Luftspalt durch Belüftung ist die spezi-
fische Wärmekapazität bei der Bestimmung des Wärmeübergangswiderstandes jedoch nicht
mehr zu vernachlässigen. Diese mögliche Erweiterung des Berechnungsmodells ist jedoch
nicht mehr Bestandteil dieser Arbeit.
4.1.2 Spezifische Wärmekapazität des Kühlmittels im Gehäuse
Das Kühlmittel im Gehäuse wird im Regelfall Luft sein. Daher ist die gleiche Argumentation
wie in 4.1.2 zulässig und führt auf
( ) 0Cδ δϑ ≈ . (4.2)
Bei Berücksichtigung von erzwungener Strömung im Gehäuse durch Belüftung ist die spezifi-
sche Wärmekapazität bei der Bestimmung der Wärmeübergangswiderstände aufgrund des
Stoffaustausches nicht mehr zu vernachlässigen und muss berücksichtigt werden. Diese mög-
liche Erweiterung des Berechnungsmodells ist jedoch nicht mehr Bestandteil

Analytische Bestimmung der Wärmekapazitäten 41
4.2 Bestimmung der Massen der Teilkörper
Gemäß (2.6) muss zur Berechnung der Wärmekapazität eines Teilkörpers dessen Masse be-
kannt sein. Die Massen der Teilkörper werden im Berechnungsprogramm aus den Geometrie-
und Werkstoffdaten bestimmt und stehen dem Unterprogramm Temperaturberechnung über
Speicherung in der globalen Variable ‚maschine’ zur Verfügung. Im Folgenden ist die Be-
rechnung der Massen der Teilkörper dokumentiert.
Hierbei ist grundsätzlich zwischen Maschinen mit verteilten Wicklungen und Maschinen mit
konzentrierten Wicklungen zu unterscheiden. Die Beschreibung der Maschinentheorie der
Maschinen mit konzentrierten Wicklungen ist [11] zu entnehmen.
Die im Folgenden verwendeten Bezeichnungen und Formelzeichen sind in [11] bzw.
[12]/[13] definiert sowie dem Anhang zu entnehmen.
4.2.1 Wicklungen in der Nut
Berechnung für verteilte Wicklungen:
Für den Querschnitt einer Spule der Statorwicklung gilt
,CU Spule DrahtA N A= ⋅ . (4.3)
Die Anzahl der Spulen der Statorwicklung ergibt sich zu
11 22 WAS K q m p= ⋅ ⋅ ⋅ ⋅ . (4.4)
Es folgt
, 1 ,2CU Nut WA S CU Spule CUm K q m p l A ρ= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ . (4.5)

Analytische Bestimmung der Wärmekapazitäten 42
Berechnung für konzentrierte Wicklungen:
Für den Querschnitt einer Spule der Statorwicklung gilt
,CU Spule DrahtA N A= ⋅ . (4.6)
Die Anzahl der Spulen ergibt sich zu
1WAS m K p= ⋅ ⋅ . (4.7)
Es folgt
, 1 ,2CU Nut WA S CU Spule CUm m K p l A ρ= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ . (4.8)
4.2.2 Wicklung am Stirnkopf
Die folgende Berechnung erfolgt für die Summe beider Wickelköpfe.
Berechnung für verteilte Wicklungen:
,CU Kopf DrahtA N A= ⋅ . (4.9)
Die Anzahl der Spulen ergibt sich zu
11 22 WAS K q m p= ⋅ ⋅ ⋅ ⋅ . (4.10)
Die effektive Stirnkopflänge ergibt sich zu
( )41
1
21 2
2Z
ST
r ll h
p m qπ ε⋅ ⋅ + ⎛ ⎞
= ⋅ − + ⋅⎜ ⎟⋅⎝ ⎠. (4.11)
Es folgt
, 1 ,2CU Kopf WA ST CU Kopf CUm K q m p l A ρ= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ . (4.12)

Analytische Bestimmung der Wärmekapazitäten 43
Berechnung für konzentrierte Wicklungen:
( )41
2n ZWA
r lm K p
πτ = ⋅ +⋅ ⋅
. (4.13)
Aus der Nutteilung nτ ergibt sich unmittelbar die effektive Spulenweite
N ZWZy bτ= − . (4.14)
Unter Beachtung der Stirnkopfhöhe 1h ergibt sich für die effektive Stirnkopflänge
12STl y h= + ⋅ . (4.15)
Es folgt für beide Stirnköpfe
1 ,2CU WA ST CU Spule CUm K m p l A ρ= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ . (4.16)
4.2.3 Statorzähne
Berechnung für verteilte Wicklungen:
Die Gesamtmasse aller Statorzähne ergibt sich zu
( ) 1 , ,Z Z S Z VN VN Fe St Fe Stm b l l h m Z K ρ= ⋅ ⋅ − + ⋅ ⋅ ⋅⎡ ⎤⎣ ⎦ . (4.17)
mit
( )4 1, ,
1
2S VN SVornut Fe St Fe St
l h r Z bm K
Zπ
ρ⋅ ⋅ ⋅ − ⋅
= ⋅ ⋅ . (4.18)

Analytische Bestimmung der Wärmekapazitäten 44
Berechnung für konzentrierte Wicklungen (hier nur mit parallelflankigen Zähnen):
Die Gesamtmasse der Statorzähne ergibt sich zu
( ) ( ) 1, ,Z Z ZWZ Z VN S Vornut Fe St Fe St
ZWZ
Zm b b l h l m KK
ρ= + ⋅ − ⋅ + ⋅ ⋅⎡ ⎤⎣ ⎦ (4.19)
mit
( )4 1, ,
1
2S VN SVornut Fe St Fe St
l h r Z bm K
Zπ
ρ⋅ ⋅ ⋅ − ⋅
= ⋅ ⋅ . (4.20)
Sollte die Geometrie der Vornut der Zwischenzähne von der Vornut der bewickelten Zähne
abweichen, ist eine weitere Anpassung der Berechnung notwendig.
4.2.4 Statorjoch
Die Gesamtmasse des Statorjoches ergibt sich zu
( )( )22, , 6 4 , ,Fe St J S Z Fe St Fe Stm l r r l Kπ ρ= ⋅ ⋅ − + ⋅ ⋅ (4.21)
4.2.5 Permanentmagnete
Die Gesamtmasse der Permanentmagnetblöcke ergibt sich zu
( )2 22 2 2
360PM
PM s m PMm l r d r p απ ρ°⎡ ⎤= ⋅ + − ⋅ ⋅ ⋅⎣ ⎦ . (4.22)
Die Schrägung der Magnete wird vernachlässigt.
Die Dichte PMρ ist über den Datensatz des Permanentmagnetwerkstoffs verfügbar.

Analytische Bestimmung der Wärmekapazitäten 45
4.2.6 Rotoreisen
Die Gesamtmasse des Rotoreisens berechnet sich zu
( )2 2, 2 1 ,Fe R S Fe R Fem l r r Kπ ρ= ⋅ ⋅ − ⋅ ⋅ . (4.23)
4.2.7 Rotorwelle
Die Rotorwelle wird als massiver Vollzylinder angenommen.
Als zusätzliche Eingabewerte sind im Berechnungsprogramm die Längen einzugeben, um die
die Welle an den Enden des Blechpaketes übersteht.
2
1Welle Welle Wellem l rπ ρ= ⋅ ⋅ ⋅ (4.24)
mit
1 2Welle S ueber ueberl l l l= + + . (4.25)
Die überstehenden Anteile der Welle gehen mit in die thermische Betrachtung ein.
Das Unterprogramm ‚Maschinendaten’ wurde um ein zusätzliches Eingabefenster für die Da-
ten der Rotorwelle ergänzt. Dieses Fenster ist dem Bild 4.2 zu entnehmen.

Analytische Bestimmung der Wärmekapazitäten 46
Bild 4.2: Eingabefenster Daten Rotorwelle
4.2.8 Gehäuse
Aufgrund der sehr unterschiedlichen Ausführungsformen von Motorgehäusen ist eine analyti-
sche Berechnung der Wärmekapazität des Motorgehäuses im Berechnungsprogramm nicht
möglich. Die Wärmekapazität des Motorgehäuses ist daher ein Vorgabewert für die Berech-
nung.

Analytische Bestimmung der Wärmekapazitäten 47
4.3 Beispielrechnungen für die Wärmekapazitäten
Bild 4.3 zeigt die berechneten Massen der Teilkörper für die Versuchsmaschine gemäß An-
hang A1. Die spezifischen Dichten der Werkstoffe werden für die Berechnung so angepasst,
dass die berechneten Massen mit den gemessenen Massen der Maschine gemäß Anhang A1
übereinstimmen. Dies ist notwendig, da die Versuchsmaschine gemäß Anhang A1 zwei End-
bleche an den Stirnseiten des Statorblechpaketes hat, die die Berechnung der Wärmeübergän-
ge über den Luftspalt nicht beeinflussen, wohl aber die Wärmekapazität des Statorblechpake-
tes (siehe auch Bild A2.1). Um diese Eigenart zu erfassen, ist eine Anpassung der spezifi-
schen Masse des Statoreisens sinnvoll.
In die Berechnung gehen die folgenden spezifischen Massen ein:
Kupfer: 38920 kgm
flussführendes Eisen: 38165 kgm
Permanentmagnete: 38300 kgm
Rotorwelle (Stahl) 37450 kgm
Bild 4.3: Massen der Teilkörper der Versuchsmaschine gemäß Anhang A1

Analytische Bestimmung der Wärmekapazitäten 48
Die Berechnung der Wärmekapazitäten bei 20°C führt unter Verwendung der in Bild 4.1 dar-
gestellten spezifischen Wärmekapazitäten auf die in Bild 4.4 dargestellten Werte.
Bild 4.5: Wärmekapazitäten der Teilkörper bei 20°C für die Versuchsmaschine gemäß
Anhang A1

Analytische Berechnung der Wärmeübergangswiderstände 49
5. Analytische Berechnung der Wärmeübergangswiderstände
Die Wärmeübergangswiderstände zwischen den homogenen Teilkörpern des Wärmeflussmo-
dells sind unter Einbeziehung von Geometrie- und Werkstoffdaten gemäß (2.5)
definiert mit
,,
1K i
i thermisch i
WOα
=⋅
(5.1)
Zu bestimmen sind jeweils die thermisch wirksame Oberfläche sowie der Wärmeübergangs-
koeffizient.
5.1 Methoden zur Bestimmung des Wärmeübergangskoeffizienten α für unterschiedliche Geometrien und Anströmzustände
Der Wärmeübergangskoeffizient α setzt sich aus drei Anteilen zusammen, aus Sα für den
Wärmeübergang durch Strahlung, Kα für den Wärmeübergang durch Konvektion und Lα für
den Wärmeübergang durch Wärmeleitung.
S K Lα α α α= + + (5.2)
Sα , Kα und Lα lassen sich rechnerisch nur näherungsweise bestimmen. In den meisten Fäl-
len, vor allem bei komplizierten Geometrien, ist eine Bestimmung mit ausreichender Ge-
nauigkeit nur empirisch im Experiment möglich. Im Folgenden soll dennoch versucht werden,
eine möglichst genaue analytische Berechnung durchzuführen, um den Einfluss der Erwär-
mung der Maschine schon bei der Dimensionierung der Maschine in automatisierten Berech-
nungsalgorithmen berücksichtigen zu können. Inwieweit diese analytische Berechnung die
realen Verhältnisse abbildet, wurde im Experiment untersucht (siehe Kapitel 8).

Analytische Berechnung der Wärmeübergangswiderstände 50
5.1.1 Wärmeübergang durch Wärmeleitung in einer Grenzschicht zwischen Teil-körpern
Ausgehend vom Wärmetransportgesetz von Fourier
( ) ( )q x T xλ= − ∇r r r& (5.3)
mit
( )q xr r& als Vektorfeld der Wärmestromdichte,
λ als Wärmeleitfähigkeit des Materials und
( )T xr als Vektorfeld der sich einstellenden Temperaturverteilung
folgt unter Annahme einer konstanten Wärmequellendichte ω& die fourier´sche Differential-
gleichung in kartesischen Koordinaten für die Temperaturverteilung in einem beliebigen Vo-
lumenelement mit
pT T T Tc
x x y y z z tλ λ λ ω ρ
⎛ ⎞∂ ∂ ∂ ∂ ∂ ∂ ∂⎛ ⎞ ⎛ ⎞+ + + = ⋅⎜ ⎟⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠⎝ ⎠& . (5.3)
Für den hier betrachteten Fall, dass sich zwei Festkörper direkt berühren bzw. durch eine de-
finierte Grenzschicht (z.B. Kleber oder Wärmeleitpaste) in direktem Kontakt stehen, muss
(5.3) für diese Grenzschicht ausgewertet werden.
Es können dabei folgende Annahmen gemacht werden:
1. keine Wärmequellen in der Grenzschicht 0ω⇒ =&
2. zu vernachlässigende Wärmespeicherkapazität in der Grenzschicht 0pc⇒ =
3. aufgrund der geringen Dicken der Grenzschichten wird von einem eindimensionalen
Wärmestrom ausgegangen.
Das zu behandelnde Problem zeigt Bild 5.1:

Analytische Berechnung der Wärmeübergangswiderstände 51
λ
Othermisch
T2
T1
s
x
Q
Bild 5.1: Eindimensionale Wärmeleitung durch eine Grenzschicht, entnommen aus [14]
Es folgt mit (5.3)
0Tx x
λ∂ ∂⎛ ⎞ =⎜ ⎟∂ ∂⎝ ⎠ . (5.4)
Die Integration führt auf
( ) 1 2T x C x C= ⋅ + . (5.5)
Mit
2 11
T TCs−
= , (5.6)
2 1C T= (5.7)
und
xdTqdx
λ= −& (5.8)
folgt für den Wärmestrom
( )1 2thermischQ O T Tsλ
= ⋅ ⋅ −& . (5.9)

Analytische Berechnung der Wärmeübergangswiderstände 52
Für den Wärmedurchgangskoeffizienten und den Wärmeübergangswiderstand folgt direkt
L sλα = (5.10)
und
1 1K
thermisch
W sOλ
= ⋅ ⋅ . (5.11)
Die Wärmeleitfähigkeit λ , die Schichtdicke der Übergangsschicht s sowie die thermisch
wirksame Oberfläche bestimmen somit den Wärmeübergangswiderstand durch Leitung bei
direktem Kontakt.
Näheres zur Berechnung aus Geometrie- und Werkstoffdaten ist den Unterkapiteln von 5.2 zu
entnehmen.
5.1.2 Wärmeübergang durch Strahlung
Der Wärmeübergangskoeffizient der Strahlung von einem Festkörper in die umgebende Luft
ist in der Literatur, siehe z.B. [4], angegeben mit
( ) ( )44
1Fest Luft
SFest Luft
T TC
T Tα
−= ⋅
− . (5.12)
Die Temperaturen sind als absolute Temperaturen in Grad Kelvin einzusetzen. Zur Unter-
scheidung wird daher der Formelbuchstabe T verwendet.
1C ist die Strahlungszahl der Oberfläche mit
1 S SC Cε= ⋅ . (5.13)
SC ist die Strahlungszahl eines idealen Schwarzkörpers mit

Analytische Berechnung der Wärmeübergangswiderstände 53
48
25,67 10SW KC
m− ⋅
= ⋅ . (5.14)
Sε ist das Emmissonsverhältnis eines Körpers im Bezug auf den schwarzen Körper.
Werte für Sε sind für unterschiedliche Werkstoffe in Tabellen in der Literatur zu finden.
Es werden sich aufgrund der Blechung des Eisens sowie möglicher Korrosion der Werkstoffe
sowie nicht genau definierter Beschaffenheit der Oberflächen Unsicherheiten bei der genauen
Bestimmung von Sε ergeben. Hier ist auf Erfahrungswerte zurückzugreifen. Näheres zur
praktischen Bestimmung von Strahlungsemissionskoeffizienten ist [25] zu entnehmen.
Tabellen in der Literatur enthalten vorwiegend Werte für die Abstrahlung in Normalenrich-
tung. Für den Schwarzkörper und in guter Näherung auch für Graustrahler kann der Wert des
Emissionsverhältnisses in Normalenrichtung auch für die Abstrahlung in die anderen Rich-
tungen übernommen werden mit S Nε ε= .
Für die verwendeten Werkstoffe ist diese Näherung zulässig.
Tabelle 5.1 zeigt wichtige Emmissionsverhältnisse für Materialien, die in elektrischen Ma-
schinen Verwendung finden.

Analytische Berechnung der Wärmeübergangswiderstände 54
Oberfläche Emmissionsverhältnis Nε
Kupfer, poliert 0,03
Kupfer, leicht angelaufen 0,037
Kupfer, oxidiert 0,76
Kupfer, schwarz oxidiert 0,78
Kupfer, geschabt 0,07
Stahl, leicht oxidierte Oberfläche 0,27
reines Eisen 0,42
Eisenblech, Walzhaut 0,657
Eisenblech, poliert 0,144
Eisenblech, geschmirgelt 0,242
Aluminium, walzblank 0,039
Papier, Pappe 0,96
Lacke (verschiedene Farben) 0,90 – 0,95
Tabelle 5.1: Emmissionsverhältnisse verschiedener Werkstoffe, entnommen aus [3], Ab-schnitt KA3
Der Übergang der Strahlung von Festkörper zu Festkörper wird berechnet mit
( ) ( )4 41 2
1,21 2
Fest FestS
Fest Fest
T TC
T Tα
−= ⋅
− (5.15)
mit
1,2,1
1 ,2 2
11 1 1
Sthermisch
thermisch
C COOε ε
=⎛ ⎞
+ ⋅ −⎜ ⎟⎝ ⎠
(5.16)
für Wärmeabstrahlung eines konvexen Körpers im geschlossenen Raum (Körper 2 umgibt
Körper 1 somit vollständig) und

Analytische Berechnung der Wärmeübergangswiderstände 55
1,2
1 2
11 1 1
SC C
ε ε
=+ −
(5.17)
für Wärmeabstrahlung zwischen ebenen parallelen Wänden mit unendlicher Ausdehnung.
,1thermischO und ,2thermischO bezeichnen die effektiven Strahlungsflächen der Körper, 1ε und 2ε
die Emmissionsverhältnisse der entsprechenden Oberflächen.
Der Index 1 bezeichnet immer den Teilkörper, dessen Oberfläche für die Berechnung des
Wärmeübergangswiderstandes als Bezugsfläche verwendet wird.
In den oben aufgeführten Fällen trifft die gesamte Strahlungsenergie, die der Körper 1 emit-
tiert, auf den Körper 2 auf und umgekehrt.
In elektrischen Maschinen sind sehr viel kompliziertere Geometrien für den Strah-
lungsübergang auszuwerten als mit der Berechnung nach (5.15-5.17) erfasst ist, wobei zu-
meist nur ein Teil der emittierten Strahlung des Körpers 1 den Körper 2 erreicht. In diesen
Fällen sind über geometrische Winkelbetrachtungen die Einstrahlzahlen 1,2ϕ und 2,1ϕ zu be-
stimmen.
Bild 5.2 zeigt die geometrische Definition der Einstrahlzahl.

Analytische Berechnung der Wärmeübergangswiderstände 56
z
a2
b2
A2
c2
b0
c0a0
d0
d2
0ΔA1
c1
b1a1
d1
x
y
Bild 5.2: geometrische Definition der Einstrahlzahl, entnommen aus [3]
Das Verhältnis der schraffierten Fläche zur Fläche des Kreises, der durch Schnitt der Halbku-
gel mit der xy-Ebene entsteht, ist gleich der gesuchten Einstrahlzahl des Flächenelements 1AΔ
auf die Fläche 2A .
Gemäß [3] gilt abgeleitet aus der geometrischen Definition nach Bild 5.2
1 2
1 21,2 1 22
1 1 2
cos cos1
A A
dA dAA s
θ θϕπ −
⋅=
⋅ ∫ ∫ (5.18)
und
12,1 1,2
2
AA
ϕ ϕ= ⋅ (5.19)
mit den Winkeldefinitionen gemäß Bild 5.3.

Analytis
1A und
Die Flä
Bezugsf
Eine we
KA6 fü
umschli
1
n
ikϕ =∑
ergibt.
Unter B
[3] KA
1,2 1C =
sche Berech
Bild 5.3: Al
2A entsprec
äche 1A ist f
fläche ist fr
eitere wicht
ür den Strah
ießenden Ra
1=
Berücksichti
A6 (11b) im
( ) (1
11 1SC ε
ε⋅
− − ⋅
nung der Wä
llgemeine G
chen den th
für die kom
ei, im Rege
tige Beziehu
lungsaustau
aumes, die s
igung wech
allgemeinen
)2 1,2
2 1,21ε ϕε ϕ ϕ
⋅ ⋅− ⋅ ⋅
ärmeübergan
Geometriean
entn
hermisch wi
mplette Bere
elfall wird d
ung ist die
usch einer F
sich aus dem
selseitiger R
n Fall für di
2,1ϕ.
ngswiderstän
nordnung z
nommen aus
rksamen Ob
echnung als
die kleinere
Summation
Fläche i mit
m Energieer
Reflexionen
ie Strahlung
nde
zur Bestimm
s [17]
berflächen g
s Bezugsfläc
Fläche als B
nsbeziehung
allen ander
rhaltungssa
n der strahle
gsaustausch
mung der Ei
gemäß (5.16
che festzule
Bezugsfläch
g der Einstra
ren Flächen
atz zu
enden Fläch
hzahl 1,2C
nstrahlzahl
6).
egen. Die W
he gewählt.
ahlzahlen n
n k des i vol
hen gilt dann
57
l,
Wahl der
nach [3],
llständig
(5.20)
n gemäß
(5.21)

Analytische Berechnung der Wärmeübergangswiderstände 58
Mit (5.12) folgt dann der Wärmeübergangskoeffizient für eine beliebige Geometrieanord-
nung.
Die Gleichung (5.18) ist im Allgemeinen nur für einfache Geometrieanordnungen analytisch
auswertbar. In [3] KB6/KB7 sind die Lösungen für einige einfache Geometrieanordnungen
angegeben. In [15] und [16] sind weitere analytische Lösungen zu finden. In [17] findet sich
ein Katalog mit analytischen Lösungen für eine Vielzahl von Geometrien, auf den im Folgen-
den mehrfach Bezug genommen wird. Die Matlabfunktionen zur numerischen Lösung und
Auswertung von Integralen werden an den Stellen genutzt, wo ein analytisches Aufstellen des
Integrals zwar möglich ist, das Integral aber nicht analytisch lösbar ist.
Ziel ist es im Folgenden, die komplizierten Geometrieanordnungen in elektrischen Maschinen
(z.B. am Stirnkopf) durch einfache Geometrieanordnungen anzunähern, die auf analytisch
lösbare Rechenvorschriften für die Einstrahlzahlen führen.
Näheres ist den jeweiligen Unterkapiteln von 5.2 zu entnehmen.
5.1.3 Wärmeübergang durch Konvektion
Der Wärmeübergangskoeffizient Kα der Konvektion beschreibt den Wärmeübergang vom
Festkörper auf ein Fluid an einer Grenzschicht unter Berücksichtigung der Strömungsverhält-
nisse.
Kα hängt in komplizierter Weise von sehr verschiedenen Einflussgrößen ab, die durch die
physikalischen Eigenschaften und den Strömungsverlauf des Fluids sowie durch die geomet-
rische Form der thermisch wirksamen Oberflächen bestimmt sind.
Eine experimentelle Ermittlung von Kα ist daher notwendig.
Die experimentelle Ermittlung führt für verschiedene Geometrieanordnungen dazu, dass ex-
perimentelle Ergebnisse auf ähnliche Geometrien umgerechnet werden können.
Die sich ergebenden Gesetzmäßigkeiten sind in der Ähnlichkeitstheorie von Nußelt zusam-
mengefasst und ausgewertet.
Die Nußeltzahl berechnet sich nach empirisch gefundenen Gesetzmäßigkeiten und Näherun-
gen für ähnliche Geometrien.

Analytische Berechnung der Wärmeübergangswiderstände 59
Die Ermittlung der Nußeltzahl Nu führt mit
KNu
lλα ⋅
= (5.22)
auf den Wärmeübergangskoeffizienten.
λ bezeichnet dabei die Wärmeleitfähigkeit des Fluids (im Regelfall Luft), die temperaturab-
hängig ist und der Literatur, z.B. [3], zu entnehmen ist.
l bezeichnet die für die Bestimmung der Nußeltzahl genutzte spezifische Länge der Anord-
nung.
Die dimensionslose Nußeltzahl hängt wiederum von anderen dimensionslosen Kenngrößen
ab, die die Strömungs- und Wärmeleitungsvorgänge kennzeichnen. Es sind mehr als 20 di-
mensionslose Größen zur Erfassung der Wärme- und Stoffübertragung definiert, ein Teil da-
von verknüpft lediglich bereits festgelegte Größen miteinander. Für den stationären Wärme-
übergang ohne Phasenänderung des Fluids, wie er in dem Zeitintervall tΔ vorliegt, werden
die folgenden benötigt:
Reynoldszahl: Re w lν⋅
= Fluid
ηνρ
= (5.23) / (5.24)
Pécletzahl: w lPea⋅
= ,Fluid p Fluid
ac
λρ
=⋅
(5.25) / (5.26)
Prandltzahl: ,PrRe
p FluidcPe ηλ
⋅= = (5.27)
Grashofzahl: ( ) 3
2Fluid Feststoffg l
Grγ ϑ ϑ
ν⋅ ⋅ − ⋅
= (5.28)
Rayleighzahl ( ) 3
Pr Fluid Feststoffg lRa Gr
aγ ϑ ϑ
ν
⋅ ⋅ − ⋅= ⋅ =
⋅ (5.29)

Analytische Berechnung der Wärmeübergangswiderstände 60
mit
l charakteristische Länge der Anordnung
λ Wärmeleitfähigkeit des Fluids, temperaturabhängig
w Geschwindigkeit des Fluids
ν kinetische Viskosität des Fluids
η dynamische Viskosität des Fluids
Fluidρ Dichte des Fluids
pc spezifische Wärmekapazität des Fluids bei konstantem Normaldruck
a Temperaturleitfähigkeit des Fluids
γ Volumenausdehnungskoeffizient des Fluids, bei idealem Gas gilt
1
FluidTγ = (5.30)
g Fallbeschleunigung
Als Fluid wird im Folgenden von trockener Luft bei Normaldruck ausgegangen.
Tabelle 5.2 quantifiziert die benötigten Werkstoffeigenschaften trockener Luft temperaturab-
hängig nach den in [3] Abschnitt Db vorgegebenen Werten.
Kennzahl Wert
λ 30,00688 5,6 10FluidT WK m K
−⎛ ⎞⋅ + ⋅⎜ ⎟ ⋅⎝ ⎠
η 20,0443 5, 29FluidT kg
K m s⎛ ⎞+⎜ ⎟ ⋅⎝ ⎠
( )Pas
Fluidρ 20,0027 1, 275FluidT kg
K m⎛ ⎞− ⋅ +⎜ ⎟⎝ ⎠
pc 0,0001 1,006FluidT J
K kg K⎛ ⎞⋅ +⎜ ⎟ ⋅⎝ ⎠
γ 1
FluidT
g 29,806 m
s
Tabelle 5.2: Werkstoffdaten trockene Luft, entnommen aus [3], Abschnitt KA3

Analytische Berechnung der Wärmeübergangswiderstände 61
5.2 Analytische Berechnung der Wärmeübergangswiderstände
Im Folgenden werden die Wärmeübergangswiderstände zwischen den Teilkörpern des Motors
analytisch berechnet.
Um mit dem vorliegenden Berechnungsmodell auch Motoren ohne Gehäuse berechnen zu
können (wie es im Rahmen dieser Arbeit ausschließlich der Fall ist), wird in diesem Fall von
einem fiktiven Gehäuse ausgegangen, dessen thermische Eigenschaften so festgelegt werden,
dass es keinen Einfluss auf die berechneten Temperaturverläufe hat. Näheres hierzu ist den
Unterkapiteln zur Berechnung der Wärmeübergangswiderstände zu entnehmen, auf die dieses
zutrifft.
5.2.1 Wärmeübergang von der Wicklung in der Nut auf das Kühlmittel im Gehäuse ( 1KW )
Der direkte Wärmeübergang von der Wicklung in der Nut auf das Kühlmittel erfolgt aus-
schließlich über die Wickelköpfe, da die Luft im Luftspalt als eigener Teilkörper definiert ist.
Der Wärmeübergangswiderstand der Wicklung in der Nut auf das Kühlmittel im Gehäuse
kann somit unendlich groß angenommen werden.
5.2.2 Wärmeübergang des Wickelkopfes auf das Kühlmittel im Gehäuse ( 2KW )
Der Wärmeübergang von der Wicklung am Stirnkopf auf das Kühlmittel im Gehäuse findet
ausschließlich durch Konvektion statt.
5.2.2.1 Thermisch wirksame Oberflächen
Für die Spulenanordnung am Stirnkopf ist eine sinnvolle Ersatzanordnung für die Bestim-
mung des Wärmeübergangs zu bestimmen. Dies ist dadurch erschwert, dass die Spulenaus-
führung am Stirnkopf sehr unterschiedlich ausfallen kann.

Analytische Berechnung der Wärmeübergangswiderstände 62
Sinnvoll ist die Einteilung des Wickelkopfes in zwei Bereiche
1. Verbindungen entlang der Stirnkopfhöhe (im folgenden Stege genannt)
2. Querverbindungen über dem Stirnkopf
Die folgende Grafik zeigt die reale Anordnung und die Ersatzanordnung.
Steg (zylinderförmig)
Querverbindung über dem Stirnkopf (zylinderförmig, nur Berücksichtigungder Mantelfläche)
h1 ls
Ersatzanordnung reale Anordnung
Bild 5.3b: Ersatzgeometrie für die Berechnung der Konvektion am Stirnkopf
Für die Stege wird als Ersatzgeometrie ein waagerechter Vollzylinder mit
Draht
CU
N ArK π
⋅=
⋅ (5.31)
angenommen.

Analytische Berechnung der Wärmeübergangswiderstände 63
Für die weitere Berechnung ist zu unterscheiden zwischen verteilten Wicklungen und kon-
zentrierten Wicklungen. An den entsprechenden Stellen der Berechnung sind die Formeln für
beide Fälle separat angegeben.
Für die thermisch wirksame Oberfläche aller Stege eines Wickelkopfes gilt somit
Berechnung für verteilte Wicklungen
( ),2,1 1 02 2 Drahtthermisch WA
CU
N AO p q m K h rK
ππ
⋅= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ −
⋅ (5.32)
Berechnung für konzentrierte Wicklungen
( ),2,1 1 1 02 2 Draht
thermisch ZWZ WAZWZ CU
N AO K K m p h rK K
ππ
⋅= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ −
⋅
( )1 1 02 2 DrahtWA
CU
N AK m p h rK
ππ
⋅= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ −
⋅ . (5.33)
Die Querverbindungen am Stirnkopf sind bei verteilten Wicklungen zumeist zu einem Lei-
terbündel zusammengefasst. Als Ersatzgeometrie für die Querverbindungen kann somit ein
Kreisring mit kreisförmigem Querschnitt angenommen werden:
Berechnung für verteilte Wicklungen:
Der Radius des Querschnitts hängt ab vom Umfang des Kreisringes mit
( ), 412 22Kreisring Kreisring Umfang VN Z VNU r r h l hπ π ⎛ ⎞= ⋅ = ⋅ + + ⋅ −⎜ ⎟
⎝ ⎠ (5.34)
sowie von der Gesamtlänge aller Querverbindungen am Stirnkopf mit

Analytische Berechnung der Wärmeübergangswiderstände 64
, 1 112Stirn gesamt WA WAl y K Z y K q m p= ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅ (5.35)
mit
( )41
12 12Zy r l
p m qεπ γ
⎛ ⎞= ⋅ + ⋅ ⋅ − ⋅⎜ ⎟⋅⎝ ⎠
. (5.36)
Somit ergibt sich für den Radius des Querschnitts des Kreisringes
,,
Stirn gesamt DrahtKreisring Querschnitt
Kreisring CU
l N ArU K π
⋅= ⋅
⋅ . (5.37)
Es folgt für die Oberfläche des Kreisrings
, ,
2, ,
2 2
4Kreisring Kreisring Querschnitt Kreisring Umfang
Kreisring Querschnitt Kreisring Umfang
O r r
r r
π π
π
= ⋅ ⋅ ⋅
= ⋅ ⋅ ⋅ . (5.38)
Von dieser Fläche sind die Flächenanteile der Verbindungen entlang der Stirnkopfhöhe mit
12 DrahtStirnkopfhöhe WA
CU
N AA p q m KK
ππ
⋅= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅
⋅ (5.39)
abzuziehen.
Es folgt somit für die thermisch wirksame Oberfläche des Kreisrings eines Wickelkopfes
,2,2thermisch Kreisring StirnkopfhöheO O A= − . (5.40)
Die so berechnete Oberfläche ist kleiner als die reale Oberfläche, da die Annahme glatter
Oberflächen in der Realität nicht zutrifft. Diesem Effekt wirkt die Tatsache entgegen, dass
nicht die gesamte reale Oberfläche freien Zugang zur Umgebungsluft hat. Diese Tatsache ist
quantitativ analytisch nicht zu erfassen. Hierfür, sowie für abweichende Wickelkopfanord-
nungen sind ggf. empirisch zu bestimmende Korrekturfaktoren einzuführen.

Analytische Berechnung der Wärmeübergangswiderstände 65
Berechnung für konzentrierte Wicklungen:
Bei Motoren mit konzentrierten Wicklungen können die Querverbindungen am Wickelkopf
als Zylinderabschnitte aufgefasst werden. Für den Radius des Querschnitts gilt
DrahtZylinder
CU
N ArK π
⋅=
⋅ . (5.41)
Für die Gesamtlänge der Querverbindungen eines Stirnkopfes gilt
, 1 11
Querverbindung gesamt WAZWZ
l y Z y p K mK
= ⋅ ⋅ = ⋅ ⋅ ⋅ (5.42)
mit
12N ZWZ ZWZ Sy b K bτ= − − ⋅ (5.43)
mit
41
12NWA
rK p m
τ π= ⋅ ⋅⋅ ⋅
. (5.44)
Es ergibt sich somit für die Oberfläche aller Querverbindungen eines Stirnkopfes
, ,2 DrahtZylinder Stirnkopf Querverbindung gesamt
CU
N AO lK
ππ
⋅= ⋅ ⋅
⋅ . (5.45)
Von dieser Fläche sind die Flächenanteile der Verbindungen entlang der Stirnkopfhöhe mit
12 DrahtStirnkopfhöhe WA
CU
N AA K m pK
ππ
⋅= ⋅ ⋅ ⋅ ⋅ ⋅
⋅ (5.46)
abzuziehen.
Es folgt somit für die thermisch wirksame Oberfläche der Querverbindungen eines Wickel-
kopfes für beide Wicklungsarten

Analytische Berechnung der Wärmeübergangswiderstände 66
,2,2 ,thermisch Zylinder Stirnkopf StirnkopfhöheO O A= − . (5.47)
Für die Gesamtoberfläche der Wicklung eines Wickelkopfes gilt somit
,2,1 ,2,2Wickelkopf thermisch thermischO O O= + (5.48)
5.2.2.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Nußeltzahl und Wärmeübergangskoeffizient sind für Stege und Querverbindungen über dem
Wickelkopf separat zu berechnen.
Zur Bestimmung des Wärmeübergangskoeffizienten der Konvektion für die Stege ist eine
Ersatzgeometrie einzuführen.
Für die Berechnung der Nußeltzahl ist die Verwendung des Modells des waagerechten Zylin-
ders zweckmäßig.
Es ergibt sich sowohl für verteilte als auch für konzentrierte Wicklungen gemäß [6]
21
6
2,1 169 9
16
10,752 0,387
0,5591Pr
l
Nu Ra
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎡ ⎤⎜ ⎟⎛ ⎞⎢ ⎥⎢ ⎥+ ⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
. (5.49)
mit der spezifischen Länge
Draht
CU
N AlK
ππ
⋅= ⋅
⋅. (5.50)

Analytische Berechnung der Wärmeübergangswiderstände 67
Insgesamt ergibt sich somit für den mittleren Wärmeübergangskoeffizienten der Verbindun-
gen entlang der Stirnkopfhöhe
2,12,1
Draht
CU
NuN AK
λα
ππ
⋅=
⋅⋅
⋅
. (5.51)
Die Berechnung des Wärmeübergangskoeffizienten der Konvektion für die Querverbindun-
gen am Stirnkopf muss für verteilte und konzentrierte Wicklungen separat berechnet werden.
Berechnung für verteilte Wicklungen:
Zur Bestimmung des Wärmeübergangskoeffizienten der Konvektion für die Querverbindun-
gen am Stirnkopf wird als Ersatzgeometrie ein Kreisring mit kreisförmigem Querschnitt an-
genommen.
Da der Kreisring eine immer noch zu komplizierte Geometrie für die Berechnung darstellt,
wird aufgrund der Anordnung der Wicklungen am Wickelkopf der Kreisring in vier Bereiche
eingeteilt, die jeweils näherungsweise als Zylinder aufgefasst werden. Bild 5.4 zeigt die Auf-
teilung in vier Abschnitte.
Bild 5.4: Ersatzanordnung für die Berechnung des konvektiven Wärmeübergangskoeffizien-
ten an den Querverbindungen der Wicklungen über den Stirnkopf bei verteilten Wicklungen

Analytische Berechnung der Wärmeübergangswiderstände 68
Der rechte und der linke Abschnitt sollen als senkrechte Zylinder aufgefasst werden.
Die mittlere Höhe wird aus Kenntnis der Oberfläche sowie des Radius bestimmt zu
,1 ,2,21 14m thermisch
Kreisring
l OU
= ⋅ ⋅ . (5.52)
Für die Berechnung der Nußeltzahl für die senkrechten Teilabschnitte ergibt sich somit gemäß
[6], Seite 368ff.
21
6
,12,2,1 16
9 ,916
10,825 0,387 0,872
0,4921Pr
m
Kreisring Querschnitt
lNu Ra
r
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅ + ⋅⎜ ⎟⎢ ⎥ ⋅⎜ ⎟⎢ ⎥⎡ ⎤⎜ ⎟⎛ ⎞⎢ ⎥⎢ ⎥+⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
(5.53)
mit der spezifischen Länge
,1ml l= . (5.54)
Der obere und der untere Abschnitt sollen als waagerechte Zylinder aufgefasst werden.
Der mittlere Ersatzradius der Abschnitte wird aus Kenntnis der Oberfläche sowie der Um-
fangslänge bestimmt zu
,2,2142
thermisch
mKreisring
Or
Uπ
⋅=
⋅. (5.55)
Für die Berechnung der Nußeltzahl für den waagerechten Teilabschnitt ergibt sich somit ge-
mäß [6], Seite 368ff.

Analytische Berechnung der Wärmeübergangswiderstände 69
216
2,2,2 169 9
16
10,752 0,387
0,5591Pr
l
Nu Ra
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎡ ⎤⎜ ⎟⎛ ⎞⎢ ⎥⎢ ⎥+ ⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
(5.56)
mit der Überströmlänge als spezifischer Länge
ml rπ= ⋅ . (5.57)
Insgesamt ergibt sich somit für die Querverbindungen
2,2,1 2,2,2
2,2 2m m
Nu Nul r
λ λ
α
⋅ ⋅+
= . (5.58)
Berechnung für konzentrierte Wicklungen:
Für die Betrachtung der konzentrierten Wicklungen kann das vorstehende Modell des Kreis-
rings nicht angewendet werden. Hier werden die Querverbindungen über den Stirnkopf als
Zylinder angenähert, die gleichmäßig am Kreisumfang verteilt sind. Der Wärmeübergangs-
koeffizient ergibt sich angenähert aus dem Mittelwert der Betrachtung für horizontalen und
vertikalen Zylinder.
Für die Berechnung der Nußeltzahl für den senkrechten Zylinder ergibt sich gemäß [6], Seite
368ff.
21
6
2,2,1 169 9
16
10,825 0,387 0,8720,4921
Pr
Draht
CU
l
yNu RaN AK π
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅ + ⋅⎜ ⎟⎢ ⎥ ⋅⎜ ⎟⎢ ⎥⎡ ⎤ ⋅⎜ ⎟⎛ ⎞ ⋅⎢ ⎥⎢ ⎥+⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
(5.59)

Analytische Berechnung der Wärmeübergangswiderstände 70
mit der spezifischen Länge
l y= . (5.60)
Für die Berechnung der Nußeltzahl für den waagerechten Zylinder ergibt sich gemäß [6], Sei-
te 368ff.
21
6
2,2,2 169 9
16
10,752 0,387
0,5591Pr
l
Nu Ra
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎡ ⎤⎜ ⎟⎛ ⎞⎢ ⎥⎢ ⎥+ ⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
(5.61)
mit der spezifischen Länge
Draht
CU
N AlK
ππ
⋅= ⋅
⋅. (5.62)
Insgesamt ergibt sich somit für den mittleren Wärmeübergangskoeffizienten der Querverbin-
dungen
2,2,1 2,2,2
2,2 2
Draht
CU
Nu Nuy N A
K
λ λ
ππ
α
⋅ ⋅+
⋅⋅
⋅= . (5.63)
Für den mittleren Wärmeübergangskoeffizienten der Gesamtanordnung folgt sowohl für ver-
teilte als auch für konzentrierte Wicklungen mit Gewichtung nach den thermisch wirksamen
Oberflächen
,2,1 ,2,22, 2,1 2,2
,2,1 ,2,2 ,2,1 ,2,2
thermisch thermischgesamt
thermisch thermisch thermisch thermisch
O OO O O O
α α α= ⋅ + ⋅+ +
. (5.64)

Analytische Berechnung der Wärmeübergangswiderstände 71
Für den gesamten Wärmeübergangswiderstand folgt somit
( )22, ,2,1 ,2,2
1K
gesamt thermisch thermisch
WO Oα
=⋅ +
. (5.65)
5.2.3 Wärmeübergang von den Statorzähnen zum Kühlmittel im Gehäuse ( 3KW )
Der Wärmeübergang von den Statorzähnen auf das Kühlmittel im Gehäuse findet ausschließ-
lich über die Stirnkopfflächen der Zähne durch Konvektion statt. Es wird von freier Konvek-
tion ausgegangen.
5.2.3.1 Thermisch wirksame Oberflächen
Die thermisch wirksame Oberfläche ist hier die Fläche der Statorzähne im Blechschnitt.
Bild 5.5 zeigt einen typischen Blechschnitt.
Bild 5.5 typischer Statorblechschnitt

Analytische Berechnung der Wärmeübergangswiderstände 72
Für die gesamte thermisch wirksame Oberfläche der Statorzähne an einem Stirnkopf ergibt
sich:
Berechnung für verteilte Wicklungen:
( ),3 1 4 1122thermisch Z Z VN VN VN sO Z b l h h r h Z bπ⎡ ⎤⎛ ⎞= ⋅ ⋅ − + ⋅ ⋅ + ⋅ − ⋅⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
(5.66)
Berechnung für konzentrierte Wicklungen:
( ) ( )
( ) ( )
1,3 4 1
14 1
122
122
thermisch Z Z VN VN VN ZWZ s ZWZZWZ
ZWZ Z VN VN VN ZWZ s ZZWZ
ZO b l h h r h Z K b bK
Z b l h h r h Z K b bK
π
π
⎡ ⎤⎛ ⎞= ⋅ ⋅ − + ⋅ ⋅ + ⋅ − ⋅ ⋅ +⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦⎡ ⎤⎛ ⎞+ ⋅ ⋅ − + ⋅ ⋅ + ⋅ − ⋅ ⋅ +⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
(5.67)
Die Betrachtung von Motoren mit konzentrierten Wicklungen ist hier beschränkt auf Motoren
mit parallelflankigen Statorzähnen. Mögliche Zwischenzähne sind einbezogen.
5.2.3.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Die in der Literatur angeführten Ersatzgeometrien nach der Ähnlichkeitstheorie des Wärme-
übergangs sind nur bedingt auf die Stirnfläche der Statorzähne anzuwenden.
Eine mögliche Näherung ist die Annahme des Statorzahnes als senkrechte ebene Platte. Der
Einfluss des Wickelkopfes auf die freie Konvektion ist analytisch nicht zu erfassen und wird
hier vernachlässigt.
Gemäß [6] S.368ff. gilt für die Nußeltzahl einer senkrechten Platte bei freier Konvektion

Analytische Berechnung der Wärmeübergangswiderstände 73
216
3 169 9
16
10,825 0,387
0, 4921Pr
l
Nu Ra
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎡ ⎤⎜ ⎟⎛ ⎞⎢ ⎥⎢ ⎥+ ⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
. (5.68)
Als spezifische Länge l ist die Höhe der senkrechten Platte einzusetzen. Da die Statorzähne
gleichmäßig am Umfang verteilt sind, wird der Mittelwert aus den Nußeltzahlen für Zahnlän-
ge ( Zl l= ) und Zahnbreite ( Zl b= ) eingesetzt.
Berechnung für verteilte Wicklungen und konzentrierte Wicklungen ohne Zwischenzähne:
( )312 Z Zl l l b
Nu Nu Nu= =
= + . (5.69)
Für den Wärmeübergangswiderstand der Statorzähne an beiden Stirnköpfen folgt
( )
1
3 ,314
K thermisch
Z Z
NuW Ol b
λ
−⎛ ⎞⎜ ⎟⋅
= ⋅⎜ ⎟⎜ ⎟+⎝ ⎠
. (5.70)
Berechnung für konzentrierte Wicklungen mit Zwischenzähnen:
Die Berechnung der Nußeltzahl ist für bewickelte Zähne und Zwischenzähne separat durchzu-
führen.
( )3,112 Z Zl l l b
Nu Nu Nu= =
= + . (5.71)
( )3,212 Z ZWZl l l b
Nu Nu Nu= =
= + . (5.72)

Analytische Berechnung der Wärmeübergangswiderstände 74
Es folgt für den Wärmeübergangswiderstand der Statorzähne an beiden Stirnköpfen sowohl
für verteilte Wicklungen als auch für konzentrierte Wicklungen
( ) ( )
1
3,1 3,23 ,3 ,31 1
4 4
ZWZZK thermisch thermisch
Z ZWZ Z ZWZZ Z Z ZWZ
Nu Nu bbW O Ob b b bl b l b
λ λ
−⎡ ⎤⎛ ⎞ ⎛ ⎞⎢ ⎥⎜ ⎟ ⎜ ⎟⋅ ⋅
= ⋅ ⋅ + ⋅ ⋅⎢ ⎥⎜ ⎟ ⎜ ⎟+ +⎢ ⎥⎜ ⎟ ⎜ ⎟+ +⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
. (5.73)
5.2.4 Wärmeübergang vom Statorjoch zum Kühlmittel im Gehäuse ( 4KW )
Der Wärmeübergang vom Statorjoch auf das Kühlmittel im Gehäuse findet ausschließlich
durch Konvektion statt. Es wird von freier Konvektion ausgegangen.
5.2.4.1 Thermisch wirksame Oberflächen
Das Statorjoch wird als Hohlzylinder aufgefasst. Für die thermisch wirksame Oberfläche gilt
somit für die Mantelfläche
( ),4,1 62 100 /100thermisch S KontaktO r l Fπ= ⋅ ⋅ ⋅ − (5.74)
mit KontaktF als Faktor, der in Prozent angibt, welcher Anteil der Zylindermantelfläche in direk-
tem Kontakt zum Gehäuse steht und somit einem separat zu berechnenden Wärmeübergangs-
widerstand zuzuordnen ist.
Für den Kreisring am Stirnkopf gilt
( )( )22,4,2 6 4thermisch ZO r r lπ= ⋅ − + . (5.75)

Analytische Berechnung der Wärmeübergangswiderstände 75
5.2.4.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Für die Nußeltzahl der Mantelfläche des horizontalen Zylinders gilt nach [6], Seite 368ff.
21
6
4,1 169 9
16
10,752 0,387
0,5591Pr
l
Nu Ra
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎡ ⎤⎜ ⎟⎛ ⎞⎢ ⎥⎢ ⎥+ ⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
(5.76)
mit der Überströmlänge als spezifischer Länge.
6l rπ= ⋅ . (5.77)
Für den Kreisring am Wickelkopf lässt sich analytisch nur eine Näherung angeben.
In erster Näherung wird der Kreisring als senkrechte Platte aufgefasst. Dies wird zu einem zu
kleinen Wert für die Nußeltzahl führen. Allerdings ist zusätzlich zu beachten, dass die freie
Konvektion ohnehin durch die Wicklung am Stirnkopf beeinträchtigt wird. Möglicherweise
einzuführende Korrekturfaktoren sind durch Experimente zu bestimmen.
Gemäß [6] S.368ff. gilt für die Nußeltzahl einer senkrechten Platte bei freier Konvektion
21
6
4,2 169 9
16
10,825 0,387
0, 4921Pr
l
Nu Ra
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎡ ⎤⎜ ⎟⎛ ⎞⎢ ⎥⎢ ⎥+ ⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
. (5.78)
Als spezifische Länge l ist die mittlere Höhe des Kreisrings einzusetzen. Diese lässt sich aus
der Fläche des Kreisrings bestimmen. Die Fläche des Kreisrings ist mit (5.75) bestimmt.

Analytische Berechnung der Wärmeübergangswiderstände 76
Für die mittlere Höhe des Kreisringes und somit für die einzusetzende spezifische Länge gilt
somit
,4,24,2
62thermischO
lr
=⋅
. (5.79)
Die nachfolgende Grafik veranschaulicht die Konvektion über den Kreisring:
Bild 5.6: freie Konvektion am Kreisring
Für den mittleren Wärmeübergangskoeffizienten der Mantelfläche folgt
4,14,1
4,1
Nul
λα
⋅= . (5.79a)
Es folgt somit für den thermischen Widerstand der Mantelfläche
,4,14,1 ,4,1
1K
thermisch
WOα
=⋅
. (5.80a)
Für den mittleren Wärmeübergangskoeffizienten der Kreisringfläche an einem Stirnkopf folgt
4,24,2
4,2
Nul
λα
⋅= . (5.80b)

Analytische Berechnung der Wärmeübergangswiderstände 77
Es folgt somit für den thermischen Widerstand der Kreisringfläche an einem Stirnkopf
4,24,2 ,4,2
1K
thermisch
WOα
=⋅
. (5.80c)
Für den gesamten Wärmeübergangswiderstand an beiden Stirnköpfen folgt
,4
,4,1 ,4,2
11 2K
K K
W
W W
=+
(5.80d)
5.2.5 Wärmeübergang von der Luft im Luftspalt auf das Kühlmittel im Gehäuse ( 5KW )
Der Wärmeübergang von der Luft im Luftspalt auf das Kühlmittel im Gehäuse ist durch die
analytisch nicht zu erfassenden (bei Rotation stark turbulenten) Strömungsverhältnisse im
Luftspalt und durch den Stoffaustausch an den Wickelköpfen analytisch schwer zu berechnen.
Der Wärmeübergang findet ausschließlich über die Stirnköpfe statt.
Ein Wärmeübergang durch Strahlung findet nicht statt.
Der Wärmeübergang wird durch einen konvektiven Wärmeübergang angenähert. Die Theorie
des konvektiven Wärmeübergangs gilt eigentlich nur für den Wärmeübergang von einem
Festkörper auf ein Fluid. Der hier berechnete konvektive Wärmeübergang zwischen zwei
Fluiden soll den Stoffaustausch simulieren, der quantitativ analytisch nicht zu erfassen ist.
Die analytische Berechnung dieses Wärmeübergangswiderstandes ist als kritisch anzusehen.
Der Vergleich von Berechnungen und Messungen zeigt, dass die Annahme von Konvektion
anstelle von Stoffaustausch zu sinn vollen Ergebnissen führt.

Analytische Berechnung der Wärmeübergangswiderstände 78
5.2.5.1 Thermisch wirksame Oberfläche
Die thermisch wirksame Oberfläche des Kreisspaltes am Stirnkopf folgt aus den Geometrie-
daten der Maschine. Zu beachten ist, dass in den Bereichen der Nutöffnung der Luftspalt um
die Höhe der Vornut erweitert ist. Die Oberfläche der Kreisspalte soll aber weiterhin als
Kreisring betrachtet werden, um die Berechnung der Nußeltzahl zu ermöglichen.
Für die thermisch wirksame Oberfläche an einem Stirnkopf folgt somit
( ) ( )( ) ( )( ),5 4 1 4 2 1 4 22 2thermisch S M S M VNO r b Z r r d b Z r r d hπ⎡ ⎤= ⋅ ⋅ − ⋅ ⋅ − + + ⋅ ⋅ − + +⎣ ⎦ . (5.81)
Die Berechnung des mittleren thermischen Luftspaltes gemäß Anlage A2 ist hier in die Be-
trachtung mit einzubeziehen.
5.2.5.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Es wird von freier Konvektion ausgegangen. Die Berechnung der Nußeltzahl für den Kreis-
ringabschnitt geschieht analog zu Kapitel 5.2.4 und führt auf folgende Formeln:
Gemäß [6] S.368ff. gilt für die Nußeltzahl einer senkrechten Platte bei freier Konvektion
21
6
5 169 9
16
10,825 0,387
0, 4921Pr
l
Nu Ra
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎡ ⎤⎜ ⎟⎛ ⎞⎢ ⎥⎢ ⎥+ ⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
. (5.82)
Für die mittlere Höhe des Kreisringes und somit für die einzusetzende spezifische Länge gilt
,5
42thermischO
lr
=⋅
. (5.83)

Analytische Berechnung der Wärmeübergangswiderstände 79
Es folgt für den Wärmeübergangskoeffizienten
55
5
Nul
λα ⋅= . (5.84)
Für den Wärmeübergangswiderstand an beiden Stirnköpfen folgt somit
55 ,5
12K
thermisch
WOα
=⋅ ⋅
.
(5.85)
Die Diffusion der Luft zwischen Luftspalt und Gehäuseinnenraum ist erst in einem nächsten
Bearbeitungsschritt sinnvoll einzubeziehen, wenn die axiale Temperaturverteilung sowie eine
mögliche axiale Belüftung mit in das Berechnungsmodell integriert werden. Diese Erweite-
rung ist aber nicht mehr Gegenstand dieser Arbeit.
5.2.6 Wärmeübergang von den Permanentmagneten auf das Kühlmittel im Ge-häuse ( 6KW )
Der Wärmeübergang von den Permanentmagneten auf das Kühlmittel im Gehäuse findet aus-
schließlich durch Konvektion über die Stirnköpfe statt. Im Folgenden wird von freier Konvek-
tion ausgegangen.
5.2.6.1 Thermisch wirksame Oberfläche
Die Stirnflächen der Permanentmagnete werden als Kreisring angenähert. Die Schrägung der
PM-Segmente wird vernachlässigt.
Für die thermisch wirksame Oberfläche an einem Stirnkopf gilt somit
( )2 2,6 2 2thermisch MO r d rπ ⎡ ⎤= ⋅ + −⎣ ⎦ . (5.86)

Analytische Berechnung der Wärmeübergangswiderstände 80
5.2.6.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Die Berechnung der Nußeltzahl findet analog zu 5.2.4 statt und führt auf
21
6
6 169 9
16
10,825 0,387
0, 4921Pr
l
Nu Ra
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎡ ⎤⎜ ⎟⎛ ⎞⎢ ⎥⎢ ⎥+ ⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
. (5.87)
Die einzusetzende spezifische Länge berechnet sich analog zu 5.2.4 mit
( ),6
22thermisch
M
Ol
r d=
⋅ +.
(5.88)
Es folgt somit für den thermischen Widerstand an beiden Stirnköpfen
( )
( )
1
166 ,6 6 2
,6
2
1 42
2
K thermisch Mthermisch
M
NuW O Nu r dOr d
λ λ
−
−
⎛ ⎞⎜ ⎟⋅⎜ ⎟= ⋅ = ⋅ ⋅ ⋅ +⎡ ⎤⎣ ⎦⎜ ⎟⎜ ⎟⋅ +⎝ ⎠
. (5.89)
5.2.7 Wärmeübergang vom Rotorjoch auf das Kühlmittel im Gehäuse ( 7KW )
Der Wärmeübergang vom Rotorjoch auf das Kühlmittel im Gehäuse findet ausschließlich
durch Konvektion über die Stirnköpfe statt. Es wird von freier Konvektion ausgegangen.

Analytische Berechnung der Wärmeübergangswiderstände 81
5.2.7.1 Thermisch wirksame Oberfläche
Die Stirnflächen werden als Kreisring angenähert.
Für die thermisch wirksame Oberfläche an einer Stirnseite gilt somit
2 2
,7 2 1thermischO r rπ ⎡ ⎤= ⋅ −⎣ ⎦ . (5.90)
5.2.7.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Die Berechnung der Nußeltzahl findet analog zu 5.2.4 statt und führt auf
21
6
7 169 9
16
10,825 0,387
0, 4921Pr
l
Nu Ra
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎡ ⎤⎜ ⎟⎛ ⎞⎢ ⎥⎢ ⎥+ ⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
. (5.91)
Die einzusetzende spezifische Länge berechnet sich analog zu 5.2.4 mit
,7
22thermischO
lr
=⋅
. (5.92)
Es folgt somit für den Wärmeübergangswiderstand an beiden Stirnköpfen
[ ]
1
177 ,7 7 2
,7
2
1 42
2
K thermischthermisch
NuW O Nu rOr
λ λ
−
−
⎛ ⎞⎜ ⎟⋅⎜ ⎟= ⋅ = ⋅ ⋅ ⋅⎜ ⎟⎜ ⎟⋅⎝ ⎠
. (5.93)

Analytische Berechnung der Wärmeübergangswiderstände 82
5.2.8 Wärmeübergang von der Rotorwelle auf das Kühlmittel im Gehäuse ( 8KW )
Der Wärmeübergang von der Rotorwelle auf das Kühlmittel im Gehäuse findet ausschließlich
durch Konvektion statt. Im Folgenden wird zunächst von freier Konvektion ausgegangen.
Die Längen der Abschnitte der Rotorwelle zwischen Austritt aus dem Rotorjoch und Durch-
führung des Gehäuses sind im Berechnungsprogramm als Eingabewerte vorgesehen.
5.2.8.1 Thermisch wirksame Oberfläche
Die Rotorwelle wird in der Modellbildung als waagerechter Zylinder angenähert.
Für die thermisch wirksame Oberfläche an beiden Stirnseiten gilt somit
( ),8 1 , 1 , 22thermisch Welle innen Welle innenO r l lπ= ⋅ ⋅ + . (5.94)
5.2.8.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Die Berechnung der Nußeltzahl für den horizontalen Zylinder wird durchgeführt mit
21
6
8 169 9
16
10,752 0,387
0,5591Pr
l
Nu Ra
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎡ ⎤⎜ ⎟⎛ ⎞⎢ ⎥⎢ ⎥+ ⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
. (5.95)
Für die einzusetzende spezifische Länge gilt
1l rπ= ⋅ . (5.96)
Es folgt somit für den Wärmeübergangswiderstand
1
88 ,8
1K thermisch
NuW Orλ
π
−⎛ ⎞⋅
= ⎜ ⎟⋅⎝ ⎠. (5.97)

Analytische Berechnung der Wärmeübergangswiderstände 83
5.2.9 Wärmeübergang von den Wicklungen in den Nuten auf die Wicklungen am Stirnkopf ( 9KW )
Der Wärmeübergang von den Wicklungen in den Nuten auf die Wicklungen am Stirnkopf
findet durch direkten Stoffkontakt statt.
Aufgrund der sehr guten Wärmeleitfähigkeit von Kupfer wird zunächst von einem unendlich
großen Wärmeübergangskoeffizienten ausgegangen.
5.2.10 Wärmeübergang von den Wicklungen am Stirnkopf auf die Statorzähne 10KW
Es wird im Folgenden davon ausgegangen, dass es keinen direkten Kontakt zwischen den
beiden Teilkörpern gibt.
Der Wärmeübergang von den Wicklungen am Wickelkopf auf die Statorzähne findet somit
ausschließlich durch Wärmestrahlung statt.
Da der Strahlungsübergang von der Wicklung am Stirnkopf nicht nur auf einen anderen Teil-
körper geschieht und es sich um recht komplizierte Geometrien handelt, muss unter Zuhilfe-
nahme der Gleichung (5.18) die Einstrahlzahl berechnet werden.
Zu bestimmen sind zunächst die thermisch wirksamen Oberflächen.
5.2.10.1 Thermisch wirksame Oberflächen
Die hier wirksame thermische Oberfläche der Statorzähne entspricht der im Kapitel 5.2.3.1
berechneten Oberfläche der Statorzähne am Stirnkopf. Diese ist für die Berechnung des Wär-
meübergangskoeffizienten durch die Anzahl der Zähne 1Z zu teilen, um die Fläche eines
Zahnes zu erhalten. Die Fläche der Vornut wird ebenfalls mit in die Rechteckfläche umge-
rechnet. Es folgt

Analytische Berechnung der Wärmeübergangswiderstände 84
Berechnung für verteilte Wicklungen:
( ) 4 11
1 122Zahn Z Z VN VN VN sO b l h h r h Z b
Zπ⎡ ⎤⎛ ⎞= ⋅ − + ⋅ ⋅ + ⋅ − ⋅⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
(Bezugsfläche) (5.98)
Berechnung für konzentrierte Wicklungen:
( ) ( )4 11
1 1 122Zahn Z Z VN VN VN ZWZ s ZWZ ZWZ Z
ZWZ
O b l h h r h Z K b b b lK Z
π⎡ ⎤⎡ ⎤⎛ ⎞= ⋅ − + ⋅ ⋅ ⋅ + ⋅ − ⋅ ⋅ + + ⋅⎢ ⎥⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦⎣ ⎦
(Bezugsfläche) (5.99)
Für die hier thermisch wirksame Oberfläche der Wicklung am Stirnkopf ist zu klären, welche
Fläche der Wicklung ein Statorzahn in welchem Sichtwinkel „sieht“. Für die anzuwendenden
Ersatzgeometrien ist es sinnvoll, analog zu 5.2.2.1 eine Aufteilung des Wickelkopfes in Stege
entlang der Stirnkopfhöhe und Querverbindungen vorzunehmen.
Ausgegangen wird daher von der in Kapitel 5.2.2 genutzten Ersatzgeometrie für den Wickel-
kopf.
Für die thermisch wirksame Fläche der Stege folgt bezogen auf einen Zahn:
, 12Wicklung Steg ZO l h= ⋅ ⋅ (5.100)
Die Querverbindung am Stirnkopf wird gemäß 5.2.2 als Zylinder angenähert. Der Ersatzra-
dius wird gemäß (5.37)/(5.41) berechnet. Um die Lösbarkeit von (5.18) zu gewährleisten,
muss eine Ersatzgeometrie gefunden werden, für die eine Berechnung der Einstrahlzahlen
analytisch möglich ist. Die beste Annäherung bietet die Anordnung zwischen einem Zylinder
und einer parallel angeordneten endlichen Rechteckfläche, deren Breite der Zylinderlänge
entspricht. Bild 5.7 zeigt diese Ersatzanordnung:

Analytische Berechnung der Wärmeübergangswiderstände 85
A1
ac
br
Bild 5.7: geometrische Ersatzanordnung
Es muss somit als Länge des Zylinderelements abweichend von 5.2.2 eine mittlere Zahnbreite
,Z mb angenommen werden mit
,Zahn
Z mZ
Obl
= . (5.102)
Sowohl für verteilte Wicklungen als auch für konzentrierte Wicklungen ist diese Annäherung
in den meisten Fällen zulässig und führt im Vergleich mit der Berechnung gemäß 5.2.2 nur zu
geringen Abweichungen.
Für die thermisch wirksame Fläche des Zylinderabschnitts der Querverbindung folgt für einen
Zahn:

Analytische Berechnung der Wärmeübergangswiderstände 86
Berechnung für verteilte Wicklungen:
, , ,2Wicklung Querverbindung Z m Kreisring QuerschnittO b rπ= ⋅ ⋅ ⋅ (5.103)
mit (5.37).
Berechnung für konzentrierte Wicklungen:
, , 2Wicklung Querverbindung Z m ZylinderO b rπ= ⋅ ⋅ ⋅ (5.104)
mit (5.41) .
5.2.10.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Betrachtung der Stege entlang der Stirnkopfhöhe:
Der Wärmeübergang von den flankierenden Stegen auf die Zahnfläche wird in der Ersatz-
anordnung als Wärmeübergang zwischen zwei senkrecht zueinander stehenden Rechteckplat-
ten mit einer gemeinsamen Kante angenähert. Anders als beim konvektiven Wärmeübergang,
wo die Stege als Zylinder angenähert wurden, trägt hier nur die dem Zahn zugewandte Seite
zum Wärmeübergang bei und wird als Rechteckfläche angenähert.
Bild 5.8 zeigt die Ersatzanordnung nach [3], Kb7

Analytische Berechnung der Wärmeübergangswiderstände 87
Bild 5.8: geometrische Ersatzanordnung
Für die Geometriegrößen der Ersatzanordnung folgt aus den berechneten Oberflächen
Za l= , (5.105)
1b h= , (5.106)
Zahn
Z
Ocl
= . (5.107)
Für die Berechnung wird zusätzlich
bBa
= und (5.108)
cCa
= (5.109)
eingeführt.
Die Lösung von (5.18) führt gemäß [3], KB6 auf

Analytische Berechnung der Wärmeübergangswiderstände 88
( )( ) ( )( )
( ) ( ) ( ) ( )
2 2
2 2
2 2 22
2 2 21,2
2 2 2 2 22
2 2 2 2 2
1 1 1arctan arctan arctan
11 ln11
4 1 1ln ln1 1 1
B C B CB C B C
B C BB
B C BB
B C C B CCB C C B C
ϕπ
⎧ ⎫⋅ + ⋅ − + ⋅⎪ ⎪+⎪ ⎪⎪ ⎪⎡ ⎤+ + ⋅⎪ ⎪⎢ ⎥⋅ += ⎨ ⎬+ ⋅ +⎢ ⎥⋅ ⎪ ⎪+ ⎢ ⎥⎪ ⎪+ + ⋅⎢ ⎥+ +⎪ ⎪⋅ −⎢ ⎥⎪ ⎪+ ⋅ + + ⋅ +⎢ ⎥⎣ ⎦⎩ ⎭
. (5.110)
Es folgt gemäß Kapitel 5.1
2,1, 1,2,
,12
ZahnSteg Steg
Wicklung Steg
O
Oϕ ϕ= ⋅
⋅ , (5.111)
( ) ( )1 2 1,2,
1,21 2 1,2, 2,1,1 1 1
S Steg
Steg Steg
CC
ε ε ϕε ε ϕ ϕ
⋅ ⋅ ⋅=
− − ⋅ − ⋅ ⋅ , (5.112)
( ) ( )44,
, 1,2,
Zahn Wicklung KopfS Steg
Zahn Wicklung Kopf
T TC
T Tα
−= ⋅
− . (5.113)
Für den gesamten Wärmeübergangswiderstand der Stege an beiden Stirnköpfen folgt somit
,10,1, 1
14K
S Steg Zahn
WO Zα
=⋅ ⋅ ⋅
. (5.114)
Betrachtung der Querverbindungen des Wickelkopfes:
Der Wärmeübergang von den Querverbindungen auf die Zahnfläche wird in der Ersatzanord-
nung als Wärmeübergang zwischen einem Zylinder und einer parallelen endlichen Rechteck-
fläche angenähert. Bild 5.7 zeigt die Ersatzanordnung nach [3], Kb7.
Für die Geometriegrößen der Ersatzanordnung folgt
für verteilte Wicklungen
r gemäß (5.37) , (5.115)

Analytische Berechnung der Wärmeübergangswiderstände 89
für konzentrierte Wicklungen
r gemäß (5.41) , (5.116)
1a h= , (5.117)
Zb l= , (5.118)
,Z mc b= . (5.119)
Die Auswertung von (5.18) führt auf
( )2
1,2,0
2B
quer f g dgB
ϕ = ∫ (5.120)
mit
( ) ( )2 2
2 2 2 2 2 2 2 2
1arccos2
14 arccos arcsin
2
YX C
A A Yf g X C YA g A g X A g A g
X
π
π
⎧ ⎫− ⋅⎪ ⎪⋅⎪ ⎪⎡ ⎤⎛ ⎞ ⎛ ⎞⎪ ⎪⎪ ⎪⎢ ⎥⎜ ⎟ ⎜ ⎟= − ⋅ + ⋅ + ⋅⎨ ⎬⎜ ⎟ ⎜ ⎟+ ⋅ + ⎢ ⎥⋅ + +⎪ ⎪⎝ ⎠ ⎝ ⎠⎢ ⎥⎪ ⎪⋅⎢ ⎥⎪ ⎪−⎢ ⎥⎪ ⎪⎣ ⎦⎩ ⎭
(5.121)
mit
aAr
= , (5.122)
bBr
= , (5.123)
cCr
= , (5.124)
2 2 2 1X A C g= + + − , (5.125) 2 2 2 1Y C A g= − − + . (5.126)

Analytische Berechnung der Wärmeübergangswiderstände 90
Die Lösung von (5.120) ist nur über numerische Integration bestimmbar. Die numerische In-
tegration wird in Matlab mittels der Integrationsfunktion QUAD durchgeführt.
Es folgt gemäß Kapitel 5.1
2,1, 1,2,,
Zahnquer quer
Wicklung Querverbindung
OO
ϕ ϕ= ⋅ , (5.127)
( ) ( )1 2 1,2
1,21 2 1,2 2,11 1 1SC
Cε ε ϕ
ε ε ϕ ϕ⋅ ⋅ ⋅
=− − ⋅ − ⋅ ⋅
, (5.128)
( ) ( )44,
, 1,2,
Zahn Wicklung KopfS Querverbindung
Zahn Wicklung Kopf
T TC
T Tα
−= ⋅
− . (5.129)
Für den Wärmeübergangswiderstand der Querverbindungen an beiden Stirnköpfen folgt somit
,10,2, 1
12K
S Querverbindung Zahn
WO Zα
=⋅ ⋅ ⋅
. (5.130)
Für den gesamten Wärmeübergangswiderstand folgt somit
,10
,10,1 ,10,2
11 1K
K K
W
W W
=+
(5.131)

Analytische Berechnung der Wärmeübergangswiderstände 91
5.2.10.3 Einstrahlzahl zwischen den Statorzähnen und der Gesamtoberfläche des Wickelkopfes
Für die Berechnung weiterer Wärmeübergangswiderstände ( ,20 ,27 ,28, ,K K KW W W ) ist die Ein-
strahlzahl zwischen den Statorzähnen und der Gesamtoberfläche der Wicklung am Stirnkopf
zu bestimmen.
Zu berechnen ist zunächst die mittlere Einstrahlzahl für den Wärmeübergang von den Stator-
zähnen auf die Wicklung am Stirnkopf ausgehend von (5.111) und (5.127) mit
, 1,2, 1,2,2Z W quer Stegϕ ϕ ϕ= + ⋅ . (5.132)
Die Einstrahlzahl von der Wicklung am Stirnkopf auf das Statoreisen am Stirnkopf bezogen
auf die Gesamtflächen der Teilkörper folgt mit
1, ,
ZahnW Z Z W
Wickelkopf
Z OO
ϕ ϕ ⋅= ⋅ (5.133)
mit
WickelkopfO gemäß (5.48).
5.2.11 Wärmeübergang von den Statorzähnen zum Statorjoch ( 11KW )
Der Wärmeübergang von den Statorzähnen auf das Statorjoch findet durch direkten Stoffkon-
takt statt. Es wird von einem unendlich großen Wärmeübergangskoeffizienten ausgegangen.
11 0KW = . (5.135)

Analytische Berechnung der Wärmeübergangswiderstände 92
5.2.12 Wärmeübergang vom Statorjoch zum Luftspalt ( 12KW )
Bei den hier betrachteten Maschinen findet kein Wärmeübergang vom Statorjoch auf die Luft
im Luftspalt statt. Der zugeordnete Wärmeübergangswiderstand wird deshalb als unendlich
groß angenommen.
12KW → ∞ (5.136)
5.2.13 Wärmeübergang von den Permanentmagneten zum Luftspalt ( 13KW )
Der Luftspalt kann in der Ersatzgeometrie durch einen konzentrischen Ringspalt dargestellt
werden. Behandelt wird hierbei die Wärmeübertragung zwischen einem Fluid im Ringspalt
(hier Luft) und den Wänden von Innen- und Außenzylindern. Da hier nur der Wärmeübergang
zwischen Innenzylinder (PM-Magnete) und Luftspalt zu berechnen ist, wird der Außenzylin-
der als ideal wärmegedämmt angesehen.
Kennzeichnende charakteristische Abmessung zur Berechnung der dimensionslosen Kenn-
größen ist der hydraulische Durchmesser
h a id d d= − . (5.137)
In den Kreisabschnitten unter den Zahnköpfen ist mit einem anderen hydraulischen Durch-
messer zu rechnen als in den Bereichen der Nutöffnung, da in letzteren die Höhe der Vornut
als zusätzlicher Luftspalt nicht vernachlässigt werden kann. In diese Betrachtung ist Anlage
A2.1 einzubeziehen.
Angewendet auf die Geometriegrößen des Motormodells folgt
( )1 4 22 2h Md r r d= ⋅ − ⋅ + unter den Zahnköpfen (5.138a)
sowie
( ) ( )2 4 22 2h VN Md r h r d= ⋅ + − ⋅ + unter der Nutöffnung. (5.138b)

Analytische Berechnung der Wärmeübergangswiderstände 93
5.2.13.1 Thermisch wirksame Oberfläche
Unter Vernachlässigung der Schrägung der Magneten wird die thermisch wirksame Oberflä-
che bestimmt mit
( ),13 22thermisch M SO r d lπ= ⋅ + ⋅ . (5.139)
5.2.13.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Für die Bestimmung der Nußeltzahl ist festzulegen, ob im Luftspalt von laminarer oder turbu-
lenter Strömung ausgegangen werden soll.
Entscheidend hierfür ist der Wert der Reynoldszahl, die definiert ist mit
1/ 2Re w lν⋅
= , 1 2/h hl d d= (5.23)
gemäß Kapitel 5.1.2.
Bis zu einem Wert von Re 2300= kann von rein laminarer Strömung ausgegangen werden.
Ab Re 10000= muss von rein turbulenter Strömung ausgegangen werden. Zwischen diesen
Grenzwerten liegt ein Übergangsbereich, in dem laminare und turbulente Strömung parallel
auftreten. Dieser Bereich ist analytisch nicht zu erfassen.
Die geringe Breite des Luftspaltes begünstigt die Ausbildung einer laminaren Strömung.
Für einen Luftspalt mit einer Breite von 0,6 mm wird der Grenzwert von Re 2300= erst für
eine Strömungsgeschwindigkeit von 29,9 mws
= erreicht. Diese Geschwindigkeit wird auch
bei axialer Belüftung des Motors nicht erreicht werden. Die Drehbewegung des Rotors hat
keinen Einfluss auf die Konvektion, da im Luftspalt eine homogene Temperaturverteilung
angenommen werden kann und somit die Effekte der erzwungenen Konvektion nicht vorlie-
gen. Inwieweit die Rotation des Rotors, insbesondere aufgrund des nicht gleichmäßigen Luft-
spaltes, die Ausbildung einer turbulenten Strömung im Luftspalt erzwingt, soll hier nicht nä-
her betrachtet werden. Die analytische Betrachtung des Wärmeübergangs unter Annahme
turbulenter Strömung durch die Bewegung des Rotors ist nicht ohne weiteres möglich, da die
für turbulente Strömung abgeleiteten Formeln nur für Re 10000≥ Gültigkeit besitzen (dies

Analytische Berechnung der Wärmeübergangswiderstände 94
würde bei einem Luftspalt einer Breite von 0,6 mm eine Fließgeschwindigkeit von mindestens
130 mws
= erfordern).
Für die Nußeltzahl ergibt sich für die vorliegenden Bedingungen nach den in [3] aufgeführten
Formeln folgende Bestimmungsgleichung für laminare Strömung:
1
3 3130,11 0,8 0,53
2 21 1
4 4
Pr 3,66 1,2 1,615 1 0,14 Re PrPr
hM M
W S
dr d r dNur r l
− −⎧ ⎫⎡ ⎤⎡ ⎤ ⎛ ⎞⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞⎪ ⎪+ +⎢ ⎥⎜ ⎟⎢ ⎥= ⋅ + ⋅ + ⋅ + ⋅ ⋅ ⋅ ⋅⎨ ⎬⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎪ ⎪⎣ ⎦ ⎝ ⎠⎢ ⎥⎣ ⎦⎩ ⎭
(5.140a) 1
3 3130,11 0,8 0,53
2 22 2
4 4
Pr 3,66 1,2 1,615 1 0,14 Re PrPr
hM M
W VN VN S
dr d r dNur h r h l
− −⎧ ⎫⎡ ⎤⎡ ⎤ ⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎪ ⎪+ +⎢ ⎥⎜ ⎟⎢ ⎥= ⋅ + ⋅ + ⋅ + ⋅ ⋅ ⋅ ⋅⎨ ⎬⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟+ +⎢ ⎥⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎪ ⎪⎣ ⎦ ⎝ ⎠⎢ ⎥⎣ ⎦⎩ ⎭ (5.140b)
mit
PrW als der bei Wandtemperatur (hier Temperatur der Permanentmagneten) berechneten
Prandltzahl.
Die Formel zeigt, dass für kleine Werte des Verhältnisses
2
Re h h h h
S S S
d w d d dwl l lν ν
⋅⋅ = ⋅ = ⋅ (5.141)
die Reynoldszahl und somit auch die Fließgeschwindigkeit des Fluids an Einfluss stark ab-
nehmen. Die Fließgeschwindigkeit hat also aufgrund der geringen Breite des Luftspaltes auf
die Konvektion im Luftspalt nur geringen Einfluss.

Analytische Berechnung der Wärmeübergangswiderstände 95
Für den Wärmeübergangskoeffizienten folgt
113,1
1h
Nud
λα ⋅= und (5.142a)
213,2
2h
Nud
λα ⋅= . (5.142b)
Für den mittleren Wärmeübergangskoeffizienten folgt
4
113 13,1 13,2
4 4
1 1
2
2 2
SS
r bbZ
r rZ Z
π
α α απ π
⋅−
= ⋅ + ⋅⋅ ⋅ . (5.142c)
Für den Wärmeübergangswiderstand folgt
,1313 ,13
1K
thermisch
WOα
=⋅
(5.143)
5.2.14 Wärmeübergang von den Permanentmagneten zum Rotorjoch ( 14KW )
Der Wärmeübergang findet gemäß 5.1.1.1 durch direkten Kontakt über eine Grenzschicht
statt. Die Beschaffenheit der Grenzschicht ist im Programm durch Eingabe von Schichtdicke
s und Wärmeleitfähigkeit λ zu definieren. Das entsprechende Eingabefenster ist in der fol-
genden Grafik zu sehen. Die aus Messungen gewonnen Werte für s und λ , die den folgenden
Beispielrechnungen zugrundeliegen, sind dem Kapitel 8 zu entnehmen.

Analytische Berechnung der Wärmeübergangswiderstände 96
Bild 5.9: Eingabefenster für Dicke und Wärmeleitfähigkeit möglicher Zwischenschichten bei
direktem Stoffkontakt
Für die thermisch wirksame Oberfläche gilt
,14 22thermisch SO r lπ= ⋅ ⋅ . (5.144)
Es folgt dann gemäß 5.1.1.1
14,14
14d s
λα = (5.145)
und
14 1414 ,14
1 1K
thermisch
W sOλ
= ⋅ ⋅ . (5.146)

Analytische Berechnung der Wärmeübergangswiderstände 97
5.2.15 Wärmeübergang vom Rotorjoch zur Welle ( 15KW )
Der Wärmeübergang findet gemäß 5.2.14 statt.
Für die thermisch wirksame Oberfläche gilt
,15 12thermisch SO r lπ= ⋅ ⋅ . (5.147)
Es folgt dann gemäß 5.1.1.1
15,15
15d s
λα = (5.148)
und
15 1515 ,15
1 1K
thermisch
W sOλ
= ⋅ ⋅ . (5.149)
5.2.16 Wärmeübergang von der Wicklung in der Nut zu den Statorzähnen ( 16KW )
Der Wärmeübergang von der Wicklung in der Nut auf die Statorzähne findet durch direkten
Stoffkontakt über eine Grenzschicht statt. Die Nutisolierung ist in diese Grenzschicht mit ein-
zubeziehen. Werte für die Wärmeleitfähigkeit sowie die Dicke der Grenzschicht sind durch
Experimente gewonnen worden. Näheres hierzu ist [25] zu entnehmen.
Der Wärmeübergang findet somit gemäß Kapitel 5.2.14 statt.
Für die thermisch wirksame Oberfläche gilt
( ),16 1 2thermisch Z VN SO Z l h l= ⋅ ⋅ − ⋅ . (5.150)
Es folgt dann gemäß 5.1.1.1

Analytische Berechnung der Wärmeübergangswiderstände 98
16,16
16d s
λα = (5.151)
und
16 1616 ,16
1 1K
thermisch
W sOλ
= ⋅ ⋅ . (5.152)
5.2.17 Wärmeübergang von der Wicklung in der Nut zum Statorjoch ( 17KW )
Der Wärmeübergang von der Wicklung in der Nut auf das Statorjoch findet durch direkten
Stoffkontakt über eine Grenzschicht statt. Die Nutisolierung ist in diese Grenzschicht mit ein-
zubeziehen. Werte für die Wärmeleitfähigkeit sowie die Dicke der Grenzschicht wurden
durch Experimente gewonnen. Näheres hierzu ist [25] zu entnehmen.
Der Wärmeübergang findet somit gemäß Kapitel 5.2.14 statt.
Für die thermisch wirksame Oberfläche gilt
Verteilte Wicklungen:
( ),17 4 12thermisch Z Z SO r l Z b lπ= ⋅ + − ⋅ ⋅⎡ ⎤⎣ ⎦ (5.153)
Konzentrierte Wicklungen:
( ),17 4 12 Z ZWZthermisch Z S
ZWZ
b bO r l Z lK
π⎡ ⎤+
= ⋅ + − ⋅ ⋅⎢ ⎥⎣ ⎦
. (5.154)
Es folgt dann gemäß 5.1.1.1
17,17
17d s
λα = (5.155)

Analytische Berechnung der Wärmeübergangswiderstände 99
und
17 1717 ,17
1 1K
thermisch
W sOλ
= ⋅ ⋅ . (5.156)
5.2.18 Wärmeübergang von der Wicklung in der Nut zum Luftspalt ( 18KW )
Der Wärmeübergang von der Wicklung in der Nut auf den Luftspalt erfolgt durch Konvekti-
on. Angewendet wird hier die Theorie des konvektiven Wärmeübergangs im Ringspalt. In
Kapitel 5.2.13 wurde die Theorie für den Wärmeübergang vom Innenzylinder auf den Ring-
spalt dargestellt. Hier handelt es sich um einen Wärmeübergang vom Außenzylinder auf den
Ringspalt. Da der Wärmeübergang nur über Ausschnitte der Zylinderfläche geschieht, gibt die
Theorie des konvektiven Wärmeübergangs im Ringspalt nur eine Näherungslösung. Diese
Näherung erscheint aber zulässig, da die Richtung der Längsausdehnung der Zylinderelemen-
te mit der Fließrichtung der Strömung des Fluids im Luftspalt zusammenfällt.
Es wird zunächst der Wärmeübergang für den Vollzylinders berechnet und anschließend der
Wärmeübergangswiderstand anteilig auf die tatsächlich zu betrachtende Fläche umgerechnet.
Die Annahme laminarer Strömung ist in Kapitel 5.2.13 begründet.
Zwischen Wicklung und Luft im Luftspalt befindet sich zumeist eine Nutisolierung, die nach
Werkstoff und Strahlungsemissionsgrad variieren kann. Es wird in diesem Modell angenom-
men, dass diese Nutisolierung stets die Temperatur der Wicklung in der Nut aufweist.
Kennzeichnende charakteristische Abmessung zur Berechnung der dimensionslosen Kenn-
größen ist der hydraulische Durchmesser
h a id d d= − . (5.157)
Angewendet auf die Geometriegrößen des Motormodells folgt
( ) ( )4 22 2h VN Md r h r d= ⋅ + − ⋅ + . (5.158)

Analytische Berechnung der Wärmeübergangswiderstände 100
5.2.18.1 Thermisch wirksame Oberfläche
,18 1thermisch S SO Z b l= ⋅ ⋅ . (5.159)
5.2.18.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Re w lν⋅
= , hl d= (5.23)
gemäß Kapitel 5.1.2.
Für die Nußeltzahl ergibt sich für die vorliegenden Bedingungen nach den in [3] Gb2 aufge-
führten Formeln folgende Bestimmungsgleichung für laminare Strömung:
1
3 31130,11 0,533
2 2
4 4
Pr 3,66 1,2 1,615 1 0,14 Re PrPr
hM M
W S
dr d r dNur r l
⎧ ⎫⎡ ⎤⎛ ⎞⎡ ⎤⎪ ⎪⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞+ +⎢ ⎥⎜ ⎟⎢ ⎥= ⋅ + ⋅ + ⋅ + ⋅ ⋅ ⋅ ⋅⎨ ⎬⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎜ ⎟ ⎝ ⎠⎪ ⎪⎣ ⎦ ⎢ ⎥⎝ ⎠⎣ ⎦⎩ ⎭
(5.160)
mit
PrW als der bei Wandtemperatur (hier Temperatur der Statorzähne) berechneten Prandltzahl.
Die Formel zeigt, dass für kleine Werte des Verhältnisses
2
Re h h h h
S S S
d w d d dwl l lν ν
⋅⋅ = ⋅ = ⋅ (5.161)
die Reynoldszahl und somit auch die Fließgeschwindigkeit des Fluids an Einfluss stark ab-
nehmen. Die Fließgeschwindigkeit hat also aufgrund der geringen Breite des Luftspaltes auf
die Konvektion im Luftspalt nur geringen Einfluss.
Für den Wärmeübergangskoeffizienten folgt

Analytische Berechnung der Wärmeübergangswiderstände 101
18 1818
h
Nud
λα ⋅= . (5.162)
Für den Wärmeübergangswiderstand folgt
,1818 ,18
1K
thermisch
WOα
=⋅
. (5.163)
5.2.19 Wärmeübergang von der Wicklung in der Nut zu den Permanentmagneten ( 19KW )
Der Wärmeübergang von der Wicklung in der Nut auf die Permanentmagnetsegmente erfolgt
durch Wärmestrahlung über die Fläche des Nutschlitzes. Zu beachten ist, dass die Nutisolie-
rung die Strahlungsemission beeinflusst. Es wird in der gesamten Modellbildung davon aus-
gegangen, dass die Nutisolierung stets die gleiche Temperatur aufweist wie die Wicklung in
der Nut.
Der Emissionsgrad der Nutisolierung ist Vorgabewert.
Aufgrund des geringen Abstandes zwischen den Strahlungsflächen kann davon ausgegangen
werden, dass die gesamte Strahlung über die Nutschlitze auf die Permanentmagnetsegmente
übergeht. Die Strahlung ausgehend von den Permanentmagnetsegmenten dagegen teilt sich
gleichmäßig auf die Fläche der Statorzähne am Innenzylinder sowie auf die Fläche der Nut-
schlitze auf. Aufgrund der einfachen Aufteilung muss keine Einstrahlzahl berechnet werden.
Die wirksame Strahlenaustauschkonstante 1,2C wird über das Flächenverhältnis angepasst.
5.2.19.1 Thermisch wirksame Oberflächen
,19,1 1thermisch S SO Z b l= ⋅ ⋅ , (5.164)
( ),19,2 22thermisch M SO r d lπ= ⋅ + ⋅ . (Bezugsfläche)
(5.165)
,19,3 42thermisch SO r lπ= ⋅ ⋅ (5.166)

Analytische Berechnung der Wärmeübergangswiderstände 102
Die Schrägung der Magneten wird vernachlässigt.
5.2.19.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Der Wärmeübergangskoeffizient bei Übergang der Strahlung von Festkörper zu Festkörper im
Doppelrohr wird berechnet mit
,19,11,2
,19,3 ,19,3
1 ,19,2 2
11 1 1
thermischS
thermisch thermisch
thermisch
OC C
O OOε ε
= ⋅⎛ ⎞
+ ⋅ −⎜ ⎟⎝ ⎠
. (5.166a)
Für den Wärmeübergangskoeffizienten folgt somit
( ) ( )4 4
,1,2
,
Magnete Wicklung NutS
Magnete Wicklung Nut
T TC
T Tα
−= ⋅
− . (5.167)
Für den Wärmeübergangswiderstand folgt somit
,19,19 ,19,2
1K
S thermisch
WOα
=⋅
. (5.168)
5.2.20 Wärmeübergang vom Wickelkopf auf das Statorjoch ( 20KW )
Der Wärmeübergang findet ausschließlich durch Strahlung statt. Für die Berechnung der Ein-
strahlzahlen ist die geometrische Anordnung des Kupfers am Wickelkopf durch Geometrien
zu ersetzen, die eine analytische Auswertung von (5.18) zulassen. Die Aufteilung des Wickel-
kopfes in Stege parallel zur Motorachse und einen Kreisring, der parallel zu der Stirnfläche
von Statorzähnen und Statorjoch liegt, erscheint sinnvoll. Diese geometrische Annäherung
wurde bereits bei der Berechnung anderer Wärmeübergangswiderstände angewendet (siehe
z.B. 5.2.2)
Der Einfluss von Stegen und Kreisring ist getrennt zu betrachten.

Analytische Berechnung der Wärmeübergangswiderstände 103
Der Wärmeübergang des Kreisrings der Querverbindungen auf das Statorjoch ist aufgrund der
komplexen Geometrie analytisch nicht zu erfassen. Aufgrund des größeren Abstandes des
Kreisrings zum Statorjoch wird der Einfluss dieses Teilwärmeübergangswiderstandes gerin-
ger eingeschätzt als der Einfluss der Stege und hier vernachlässigt.
5.2.20.1 Thermisch wirksame Oberflächen
Die thermisch wirksamen Oberflächen der Stege werden durch Rechteckflächen angenähert.
Beim Wärmeübergang von den Stegen auf das Statorjoch ist zunächst die Fläche eines Steges,
angrenzend an den Nutgrund zu bestimmen mit
( ) ( )4,20,1 1
1
2 1Zthermisch Z ZWZ
ZWZ
r lO b b h
Z Kπ ⋅ +⎡ ⎤
= − ⋅ + ⋅⎢ ⎥⎣ ⎦
. (Bezugsfläche)
(5.169)
Als Anteil des Stators, auf den diese Fläche effektiv abstrahlt, wird eine Umfangslänge von
zwei Nutteilungen angenommen. Für die hier thermisch wirksame Oberfläche des Statorjochs
ergibt sich somit
( )22,20,2 6 4
1
22thermisch ZO r r lZπ ⎡ ⎤= ⋅ ⋅ − +⎣ ⎦ .
(5.170)
Die Seitenflächen der Stege an den Zahnflanken sind zu bestimmen mit
( ),20,3 1thermisch Z VNO l h h= − ⋅ . (Bezugsfläche) (5.171)
Als Anteil des Stators, auf den diese Fläche effektiv abstrahlt, wird eine Umfangslänge von
einer Nutteilung angenommen. Für die hier thermisch wirksame Oberfläche des Statorjochs
ergibt sich somit

Analytische Berechnung der Wärmeübergangswiderstände 104
,20,4 ,20,112thermisch thermischO O= ⋅ . (5.172)
Bei im Verhältnis zu ihrer Länge sehr dünnen Zähnen kann es zu genaueren Ergebnissen füh-
ren, statt einer Nutteilung nur die Zahnbreite als thermisch wirksame Fläche des Stators zu
berücksichtigen.
Für die weitere Betrachtung wird die Krümmung des Jochs vernachlässigt.
Die Gesamtoberfläche der Wicklung am Wickelkopf ist mit (5.48) berechnet.
5.2.20.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Die Annahme einer Ersatzgeometrie durch senkrecht aufeinander stehende Flächen mit einer
gemeinsamen Kante ist hier um die Tatsache zu erweitern, daß die Seitenlängen der Flächen
an der gemeinsamen Kante nicht gleich sind.
Es wird daher vom allgemeinen Fall zweier Flächen, die eine parallele Kante haben, ausge-
gangen. Bild 5.10 zeigt diesen allgemeinen Fall.
Bild 5.10: Ersatzgeometrie für die Bestimmung der Einstrahlzahl zweier rechteckiger Flächen
mit einer parallelen Kante

Analytische Berechnung der Wärmeübergangswiderstände 105
Die Einstrahlzahl wird durch Lösung von (5.8c) bestimmt mit
(5.173)
Die Lösung von G ist nur über numerische Integration zu bestimmen. Die numerische Integra-
tion wird in Matlab mittels der Funktion QUAD durchgeführt.
Für den Wärmeübergang von der Fläche des Steges am Nutgrund auf das Statorjoch sind die
Geometriewerte wie folgt anzusetzen:
( ) ( )
( )
( )
1
2 1
1
2 6 4
41 4
1 1
42 1
1
1
2 1 41
0
0
21 2 122
2 1
022
90
Z
Z Z ZWZZWZ
Z ZWZZWZ
Z
xx h
r r l
ry r l b bZ Z K
ry y b bZ K
r lZ
ξξ
ππ
π
ηπη η
α
==== − −
⎡ ⎤⎛ ⎞⋅= ⋅ ⋅ ⋅ + − − ⋅ +⎢ ⎥⎜ ⎟
⎝ ⎠⎣ ⎦⎛ ⎞⋅
= + − ⋅ +⎜ ⎟⎝ ⎠
=
= + ⋅ ⋅ +
= °
Es folgt 1,2,Nutgrundϕ gemäß (5.173).
( )( ) ( )
( ) ( )( ) ( )
( )( )
2 2 2 2
1,21 1 1 11
2 2
1/ 2 1/ 22 2 2 2 2
1 222 22
2 2
1 1 , , ,
mit
sin cos cos sinarctan
2 2 cos sin 2 cos
cos cossin arctansin sin
i j k li j k l
i j k lG x y
A
y x yGx x x x
xyy
+ + +
= = = =
ξ
⎡ ⎤ϕ = − η ξ ⎦⎣
⎛ ⎡ ⎤η − α − ξ α α − ξ α η −⎜ ⎢ ⎥= − ⎜ ⎢ ⎥π ⎜ − ξ α + ξ α − ξ α + ξ⎢ ⎥⎝ ⎣ ⎦
α − ξ α⎡ ⎤+ ξ α + η −⎣ ⎦η − α ξ
∑∑∑∑
∫
( )
( )( )
1 22
22 2
2 2
cossin arctansin
2 cosln
2 2 cos
x
y
x x yd
y x x
⎧ ⎫− ξ α⎪ ⎪⎛ ⎞− ξ α ⋅⎨ ⎬⎜ ⎟α⎝ ⎠⎡ ⎤⎪ ⎪α + η −⎣ ⎦⎩ ⎭
⎞⎡ ⎤− ξ α + ξ + η −ξ ⎟+ ξ⎢ ⎥⎟η − − ξ α + ξ⎢ ⎥⎣ ⎦ ⎠

Analytische Berechnung der Wärmeübergangswiderstände 106
Für den Wärmeübergang von der Fläche des Steges an der Zahnflanke auf das Statorjoch sind
die Geometriewerte wie folgt anzusetzen:
( )
( )
1
2 1
1
2 4 6 41
1
2
1 2
2 1 6 4
0
02 1
20
90
Z Z
Z VN
Z
xx h
r l r r lZ
yy l h
yr r l
ξπξ
ηη ηα
===
⎛ ⎞= ⋅ + + ⋅ − −⎜ ⎟⎝ ⎠
== −=
= + − −
= °
Es folgt 1,2,Zahnflankeϕ gemäß (5.173).
Es folgt gemäß Kapitel 5.1
,20,12,1, 1,2,
,20,2
thermischNutgrund Nutgrund
thermisch
OO
ϕ ϕ= ⋅ , (5.174)
,20,32,1, 1,2,
,20,4
thermischZahnflanke Zahnflanke
thermisch
OO
ϕ ϕ= ⋅ , (5.175)
( ) ( )1 2 1,2,
1,2,1 2 1,2, 2,1,1 1 1
S NutgrundNutgrund
Nutgrund Nutgrund
CC
ε ε ϕε ε ϕ ϕ
⋅ ⋅ ⋅=
− − ⋅ − ⋅ ⋅ , (5.176)
( ) ( )1 2 1,2,
1,2,1 2 1,2, 2,1,1 1 1
S ZahnflankeZahnflanke
Zahnflanke Zahnflanke
CC
ε ε ϕε ε ϕ ϕ
⋅ ⋅ ⋅=
− − ⋅ − ⋅ ⋅ . (5.177)
Für die Wärmeübergangskoeffizienten folgt somit
( ) ( )4 4
,, 1,2,
,
Statorjoch Wicklung KopfS Nutgrund Nutgrund
Statorjoch Wicklung Kopf
T TC
T Tα
−= ⋅
− (5.178)

Analytische Berechnung der Wärmeübergangswiderstände 107
und
( ) ( )4 4
,, 1,2,
,
Statorjoch Wicklung KopfS Zahnflanke Zahnflanke
Statorjoch Wicklung Kopf
T TC
T Tα
−= ⋅
− . (5.179)
Für den Wärmeübergangswiderstand der Stege auf das Statorjoch an beiden Stirnköpfen folgt
somit
,20,1, ,20,1 1
1 12K
S Nutgrund thermisch
WO Zα
= ⋅⋅ ⋅
. (5.180)
,20,2, ,20,3 1
1 12 2K
S Zahnflanke thermisch
WO Zα
= ⋅⋅ ⋅ ⋅
. (5.181)
Der zusätzliche Faktor 12
ergibt sich dadurch, daß beide Stirnköpfe zu beachten sind.
Für den gesamten Wärmeübergangswiderstand folgt somit
,20
,20,1 ,20,2
11 1K
K K
W
W W
=+
. (5.182)
Die direkte Eingabe eines Wärmeübergangskoeffizienten im Programm ist möglich. Bezugs-
fläche ist dann die Gesamtoberfläche der Wicklung am Wickelkopf für beide Stirnköpfe.
5.2.20.3 Einstrahlzahl zwischen dem Statorjoch und der Gesamtoberfläche des Wi-ckelkopfes
Für die Berechnung weiterer Wärmeübergangswiderstände ( ,27 ,28,K KW W ) ist die Einstrahlzahl
zwischen dem Statorjoch und der Gesamtoberfläche der Wicklung am Stirnkopf zu bestim-
men.
Zu berechnen ist zunächst die mittlere Einstrahlzahl für den Wärmeübergang vom Statoreisen
auf die Wicklung am Stirnkopf (zu betrachten ist eine Nutteilung) mit

Analytische Berechnung der Wärmeübergangswiderstände 108
2,1, ,20,2 2,1, ,20,4,
,20,2
212
Nutgrund thermisch Zahnflanke thermischE W
thermisch
O O
O
ϕ ϕϕ
⋅ + ⋅ ⋅=
⋅ . (5.183)
Die mittlere Einstrahlzahl von der Wicklung am Wickelkopf auf das Statoreisen am Stirnkopf
folgt mit
1,2, 1 ,20,1 1,2, 1 ,20,3,
2Nutgrund thermisch Zahnflanke thermischW E
Wickelkopf
Z O Z OO
ϕ ϕϕ
⋅ ⋅ + ⋅ ⋅ ⋅= . (5.184)
5.2.21 Wärmeübergang von den Statorzähnen auf den Luftspalt ( 21KW )
Der Wärmeübergang vom Eisen der Statorzähne auf die Luft im Luftspalt erfolgt durch Kon-
vektion. Anzuwenden ist hier die Theorie des konvektiven Wärmeübergangs im Ringspalt.
Die Begründung hierfür ist Kapitel 5.2.18 zu entnehmen.
Kennzeichnende charakteristische Abmessung zur Berechnung der dimensionslosen Kenn-
größen ist der hydraulische Durchmesser
h a id d d= − . (5.185a)
Angewendet auf die Geometriegrößen des Motormodells folgt
( )4 22 2h Md r r d= ⋅ − ⋅ + . (5.185b)
5.2.21.1 Thermisch wirksame Oberfläche
( ),18 4 12thermisch S SO r Z b lπ= ⋅ − ⋅ ⋅ (5.185c)

Analytische Berechnung der Wärmeübergangswiderstände 109
5.2.21.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Re w lν⋅
= , hl d= (5.23)
gemäß Kapitel 5.1.2.
Für die Nußeltzahl ergibt sich für die vorliegenden Bedingungen nach den in [3] Gb2 aufge-
führten Formeln folgende Bestimmungsgleichung für laminare Strömung:
1
3 31130,11 0,533
2 2
4 4
Pr 3,66 1,2 1,615 1 0,14 Re PrPr
hM M
W S
dr d r dNur r l
⎧ ⎫⎡ ⎤⎛ ⎞⎡ ⎤⎪ ⎪⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞+ +⎢ ⎥⎜ ⎟⎢ ⎥= ⋅ + ⋅ + ⋅ + ⋅ ⋅ ⋅ ⋅⎨ ⎬⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎜ ⎟ ⎝ ⎠⎪ ⎪⎣ ⎦ ⎢ ⎥⎝ ⎠⎣ ⎦⎩ ⎭
(5.160)
mit
PrW als der bei Wandtemperatur (hier Temperatur der Statorzähne) berechneten Prandltzahl.
Die Formel zeigt, daß für kleine Werte des Verhältnisses
2
Re h h h h
S S S
d w d d dwl l lν ν
⋅⋅ = ⋅ = ⋅ (5.161)
die Reynoldszahl und somit auch die Fließgeschwindigkeit des Fluids an Einfluss stark ab-
nehmen. Die Fließgeschwindigkeit hat also aufgrund der geringen Breite des Luftspaltes auf
die Konvektion im Luftspalt nur geringen Einfluss.
Für den Wärmeübergangskoeffizienten folgt
18 1818
h
Nud
λα ⋅= . (5.162)

Analytische Berechnung der Wärmeübergangswiderstände 110
Für den Wärmeübergangswiderstand folgt
,1818 ,18
1K
thermisch
WOα
=⋅
. (5.163)
5.2.22 Wärmeübergang von den Statorzähnen zu den Permanentmagneten ( 22KW )
Der Wärmeübergang erfolgt durch Wärmestrahlung über die Flächen der Zähne an der Stato-
rinnenseite.
Aufgrund des geringen Abstandes zwischen den Strahlungsflächen kann davon ausgegangen
werden, daß die gesamte Strahlung ausgehend von den Flächen der Zähne auf die Perma-
nentmagneten übergeht. Die Strahlung ausgehend von den Permanentmagneten dagegen teilt
sich gleichmäßig auf die Fläche der Statorzähne an der Statorinnenseite sowie auf die Fläche
der Nutschlitze auf. Aufgrund der einfachen Aufteilung muss keine Einstrahlzahl berechnet
werden. Die wirksame Strahlungsaustauschkonstante 1,2C wird über das Flächenverhältnis
angepasst.
Parallel ist Kapitel 5.2.19 zu beachten.
5.2.22.1 Thermisch wirksame Oberflächen
,22,1 4 12thermisch S S SO r l Z b lπ= ⋅ ⋅ − ⋅ ⋅ , (5.186)
( ),22,2 22thermisch M SO r d lπ= ⋅ + ⋅ , (Bezugsfläche) (5.187)
,22,3 42thermisch SO r lπ= ⋅ ⋅ . (5.188)
Die Schrägung der Magneten wird vernachlässigt.

Analytische Berechnung der Wärmeübergangswiderstände 111
5.2.22.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Der Wärmeübergangskoeffizient beim Übergang der Strahlung von Festkörper zu Festkörper
im Doppelrohr wird berechnet mit
,22,11,2
,22,2 ,22,3
1 ,22,3 2
11 1 1
thermischS
thermisch thermisch
thermisch
OC C
O OOε ε
= ⋅⎛ ⎞
+ ⋅ −⎜ ⎟⎝ ⎠
. (5.189)
Für den Wärmeübergangskoeffizienten folgt somit
( ) ( )4 4
,,22 1,2
,
Magnete Eisen ZahnS
Magnete Eisen Zahn
T TC
T Tα
−= ⋅
− . (5.15)
Für den Wärmeübergangswiderstand folgt somit
,22,22 ,22,2
1K
S thermisch
WOα
=⋅
. (5.190a)
5.2.23 Wärmeübergang vom Statorjoch zu den Permanentmagneten ( 23KW )
Zwischen Statorjoch und den Permanentmagnetsegmenten findet kein direkter Wärmeüber-
gang statt.
Es folgt
23 0α = ,
,23KW → ∞ .

Analytische Berechnung der Wärmeübergangswiderstände 112
5.2.24 Wärmeübergang vom Kühlmittel im Gehäuse zur Umgebung ( 24KW )
Der Wärmeübergang vom Kühlmittel auf die Umgebung ist abhängig von der Beschaffenheit
des Motorgehäuses. Eine analytische Berechnung ist im Regelfall nicht möglich. Die direkte
Eingabe des Widerstandwertes nach empirischer Bestimmung ist notwendig. Soll in der Be-
rechnung davon ausgegangen werden, daß kein Gehäuse vorhanden ist, so muss
,24 0KW =
gesetzt werden.
5.2.25 Wärmeübergang vom Gehäuse zur Umgebung ( 25KW )
Der Wärmeübergang vom Gehäuse auf die Umgebung ist stark abhängig von der Beschaffen-
heit des Motorgehäuses. Eine analytische Berechnung ist im Regelfall nicht möglich. Die di-
rekte Eingabe des Widerstandwertes nach empirischer Bestimmung ist notwendig. Soll in der
Berechnung davon ausgegangen werden, daß kein Gehäuse vorhanden ist, so muss
,25 0KW =
gesetzt werden.
5.2.26 Wärmeübergang vom Kühlmittel im Gehäuse zum Gehäuse ( 26KW )
Der Wärmeübergang vom Kühlmittel im Gehäuse auf das Gehäuse ist stark abhängig von der
Beschaffenheit des Motorgehäuses. Eine analytische Berechnung ist im Regelfall nicht mög-
lich. Die direkte Eingabe des Widerstandwertes ist notwendig. Soll in der Berechnung davon
ausgegangen werden, daß kein Gehäuse vorhanden ist, so muss
,26 0KW =
gesetzt werden.

Analytische Berechnung der Wärmeübergangswiderstände 113
5.2.27 Wärmeübergang vom Statorjoch zum Gehäuse und vom Wickelkopf zum Gehäuse ( 27 28/K KW W )
Die Berechnung dieser beiden Wärmeübergangswiderstände ist nicht unabhängig voneinander
durchführbar.
Die Berechnung ist außerdem im Zusammenhang mit 5.2.10 und 5.2.20 zu sehen.
Die Wärmeübergänge von Rotorjoch und Rotorwelle auf das Gehäuse werden entkoppelt be-
trachtet. Diese Entkopplung ist notwendig, um eine analytische Berechenbarkeit der Wärme-
übergangswiderstände zu ermöglichen. Der Wärmeübergang vom Gehäuse auf die Statorzäh-
ne wird vernachlässigt. Diese Näherung ist notwendig, um die analytische Berechenbarkeit
der anderen Wärmeübergangswiderstände zu ermöglichen. Diese Näherung ist zulässig, da
die Statorzähne zumeist durch den Wickelkopf abgedeckt sind.
Der Wärmeübergang findet ausschließlich durch Strahlung statt. Er ist trotz nicht bekannter
Beschaffenheit des Gehäuses analytisch bestimmbar, da durch das Gehäuse eine geschlossene
Hüllfläche geschaffen wird.
Aufgrund dieser geschlossenen Hüllfläche kann über eine Energiebilanz gemäß (5.20) der
Wärmeübergang auf das Gehäuse berechnet werden. Dies führt dazu, dass die Wärmeüber-
gangswiderstände 10KW , 20KW , 27KW und 28KW nicht unabhängig voneinander berechnet wer-
den können.
5.2.27.1 Berechnung der Einstrahlzahlen
Bild 5.8 zeigt schematisch den Wärmeübergang durch Strahlung zwischen den Teilkörpern
am Stirnkopf und definiert die Einstrahlzahlen und Bezugsflächen.

Analytische Berechnung der Wärmeübergangswiderstände 114
,G Gϕ,W Wϕ
,G Wϕ
,W Gϕ
,E Wϕ
,W Eϕ,G Eϕ
,E Gϕ
,W Zϕ
,Z Wϕ
Bild 5.11: Wärmeübergang durch Strahlung zwischen den Teilkörpern am Stirnkopf und
Definition der entsprechenden Einstrahlzahlen
Am Stirnkopf ist gemäß 5.2.20/5.2.10 bekannt, welche Einstrahlzahlen zwischen Statorjoch
und Wicklung am Stirnkopf sowie zwischen Statorzähnen und Wicklung am Stirnkopf vorlie-
gen (die entsprechenden Pfeile sind im Diagramm grün markiert).
Die Einstrahlzahlen von Gehäuse und Wicklung am Stirnkopf auf sich selbst ( ,G Gϕ und ,W Wϕ )
sind aufgrund der Geometrie nicht zu vernachlässigen. Diese Werte sind analytisch im Regel-
fall schwer zu erfassen und deshalb im Berechnungsprogramm Vorgabewert. Sie sind abzu-
schätzen oder empirisch zu bestimmen. Für die Beispielrechnungen verwendete Werte sind
dem Anhang A1 zu entnehmen.
Ebenso ist das Verhältnis ,
,
G W
G E
Vϕ
ϕϕ
= ein Vorgabewert, da die Aufteilung der Strahlung des
Gehäuses auf Wickelkopf und Statorjoch am Stirnkopf nicht analytisch zu erfassen ist.

Analytische Berechnung der Wärmeübergangswiderstände 115
Für die weiteren Einstrahlzahlen folgt dann
, , , ,1W G W W W E W Zϕ ϕ ϕ ϕ= − − − , (5.191)
, ,1E G E Wϕ ϕ= − , (5.192)
( ), ,11 11
G W G G
Vϕ
ϕ ϕ= − ⋅+
, (5.193)
und
( ), ,11
1G E G G Vϕ
ϕ ϕ= − ⋅+
. (5.194)
5.2.27.2 Wärmeübergangskoeffizienten und Wärmeübergangswiderstände
Für die Strahlungsaustauschzahl folgt gemäß Kapitel 5.1.2
( ) ( )1 2 ,
27,11 2 , ,1 1 1
S E G
E G G E
CC
ε ε ϕε ε ϕ ϕ
⋅ ⋅ ⋅=
− − ⋅ − ⋅ ⋅ . (5.195)
( ) ( )1 2 ,
281 2 , ,1 1 1
S W G
W G G W
CC
ε ε ϕε ε ϕ ϕ
⋅ ⋅ ⋅=
− − ⋅ − ⋅ ⋅ . (5.196)
Für die Wärmeübergangskoeffizienten folgt somit
( ) ( )4 4
27,1 27,1Statorjoch Gehäuse
Statorjoch Gehäuse
T TC
T Tα
−= ⋅
− (5.197)
( ) ( )4 4,
28 28Wicklung Wickelkopf Gehäuse
Wickelkopf Gehäuse
T TC
T Tα
−= ⋅
− (5.198)

Analytische Berechnung der Wärmeübergangswiderstände 116
Mit den entsprechenden Bezugsflächen folgt für beide Stirnköpfe
( ),27,1 22
27,1 6 4
1 12K
Z
Wr r lα π
= ⋅⎡ ⎤⋅ ⋅ + +⎣ ⎦
(5.199)
und
,2828
1 12K
Wickelkopf
WOα
= ⋅⋅
. (5.200)
Zusätzlich ist der Wärmeübergang zwischen der Zylinderfläche des Statorjoches und dem
Gehäuse einzubeziehen. Hierbei kann ein vollständiger Strahlungsaustausch zwischen diesen
Flächen angenommen werden. Eine mögliche Strahlung des Gehäuses auf sich selbst wird
hier vernachlässigt. Daher folgt direkt
27,2
1 2
11 1 1
SC C
ε ε
=+ −
. (5.17)
Es folgt
( ) ( )4 4,
27,2 27,2,
Eisen Stator Gehäuse
Eisen Stator Gehäuse
T TC
T Tα
−= ⋅
− . (5.201)
und
( ),27,2,127,2 6
1002 100K
S Kontakt
Wr l Fα π
=⋅ ⋅ ⋅ ⋅ −
(5.202)
mit KontaktF als Faktor, der in Prozent angibt, welcher Anteil der Zylinderfläche in direktem
Kontakt zum Gehäuse steht.
Zusätzlich ist ein möglicher direkter Kontakt zwischen Statorjoch und Gehäuse zu berück-
sichtigen gemäß

Analytische Berechnung der Wärmeübergangswiderstände 117
27,27
27d s
λα = (5.202a)
und
27,27,2,2
17 6
1002K
S Kontakt
sWr l Fλ π
= ⋅ ⋅⋅ ⋅ ⋅
(5.202b)
Es folgt
,27,2
,27,2,1 ,27,2,2
11 1K
K K
W
W W
=+
(5.203c)
Für den Gesamtwiderstand (beide Stirnköpfe berücksichtigt) folgt somit
,27
,27,1 ,27,2
11 1K
K K
W
W W
=+
. (5.203d)
Soll ein fiktives Gehäuse ohne Einfluss auf die Berechnung genutzt werden (real kein Gehäu-
se vorhanden), so ist
2 1Gehäuseε ε= =
zu setzen.
5.2.29 Wärmeübergang von der Rotorwelle zur Umgebung ( 29KW )
Der Wärmeübergang von der Rotorwelle auf die Umgebung findet durch Konvektion und
Strahlung statt. Der Strahlungsübergang von der Rotorwelle auf das Gehäuse wird vernach-
lässigt.

Analytische Berechnung der Wärmeübergangswiderstände 118
5.2.29.1 Thermisch wirksame Oberflächen
Die Rotorwelle außerhalb des Gehäuses wird als horizontaler Zylinder aufgefasst. Die Stirn-
flächen werden nicht berücksichtigt. Für die Gesamtlänge an beiden Stirnköpfen folgt mit den
Vorgabewerten Wellenüberhang 1 (Kupplungsseite) , ,1Welle aussenl und Wellenüberhang 2 (Mo-
torrückseite) , ,2Welle aussenl
, , ,1 , ,2Welle aussen Welle aussen Welle aussenl l l= + . (5.204)
Mit dem Wellenradius folgt somit
,29 1 ,2thermisch Welle aussenO r lπ= ⋅ ⋅ . (5.205)
5.2.29.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Es wird davon ausgegangen, daß die Strahlung komplett auf den Umgebungsraum abgestrahlt
wird. Es folgt somit gemäß 5.1.2 direkt
( ) ( )4 4
29, 1Welle U
S SWelle U
T TC
T Tα ε
−= ⋅ ⋅
− . (5.206)
Für die Berechnung der Nußeltzahl ist die Verwendung des Modells des horizontalen Zylin-
ders zweckmäßig mit 21
6
29 169 9
16
10,752 0,387
0,5591Pr
l
Nu Ra
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⋅ ⋅⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎡ ⎤⎜ ⎟⎛ ⎞⎢ ⎥⎢ ⎥+ ⎜ ⎟⎜ ⎟⎢ ⎥⎢ ⎥⎝ ⎠⎜ ⎟⎣ ⎦⎝ ⎠⎢ ⎥⎣ ⎦
. (5.207)
mit 1l rπ= ⋅ . (5.208)

Analytische Berechnung der Wärmeübergangswiderstände 119
Insgesamt ergibt sich somit für den mittleren Wärmeübergangskoeffizienten der Verbindun-
gen entlang der Stirnkopfhöhe
2929,
1K
Nur
λαπ
⋅=
⋅ . (5.209)
Für den Wärmeübergangswiderstand beider Stirnköpfe folgt somit
( ),2929, 29, ,29
1K
S K thermisch
WOα α
=+ ⋅
. (5.210)
5.2.30 Wärmeübergänge von Teilkörpern innerhalb des Gehäuses auf die Umge-bung ( 30 36K KW W− )
Es findet kein direkter Wärmeübergang von Teilkörpern innerhalb des Gehäuses auf die Um-
gebung statt. Die entsprechenden Wärmeübergangswiderstände gehen somit gegen unendlich.
Im Programm ist keine Eingabemöglichkeit für diese Widerstände vorgesehen.
5.2.31 Wärmeübergang vom Rotorjoch auf das Gehäuse ( 37KW )
Der Wärmeübergang vom Rotorjoch auf das Gehäuse findet ausschließlich durch Strahlung
statt. Näherungsweise wird davon ausgegangen, daß die gesamte Strahlung der Stirnseiten des
Rotorjochs auf das Gehäuse übergeht. Ein möglicher Strahlungsaustausch mit der Wicklung
am Stirnkopf wird vernachlässigt, da diese analytisch nur sehr ungenau erfassbar ist und einen
geringen Einfluss auf die Temperaturverteilung haben dürfte. Desweiteren wird davon ausge-
gangen, daß keine Strahlung vom Gehäuse auf das Rotorjoch übergeht. Diese Annahmen er-
möglichen eine Entkopplung der Berechnung von 37KW von den Strahlungsübergängen der
Teilkörper des Stators auf das Gehäuse (siehe Kapitel 5.2.27). Diese Annahmen sind durch
Vergleich von Beispielrechnungen mit Messungen unter Verwendung eines Gehäuses zu veri-
fizieren.

Analytische Berechnung der Wärmeübergangswiderstände 120
Mit obigen Annahmen folgt für die Einstrahlzahl vom Rotorjoch auf das Gehäuse
, 1R Gϕ = (5.211)
und für die Einstrahlzahl des Gehäuses auf das Rotorjoch
, 0G Rϕ = . (5.212)
5.2.31.1 Thermisch wirksame Oberfläche
Die thermisch wirksame Oberfläche entspricht den Stirnflächen des Rotorjochs und kann so-
mit als Kreisring berechnet werden.
Für die Oberfläche beider Stirnseiten gilt
( )2 2,37 2 12thermischO r rπ= ⋅ ⋅ − . (5.213)
5.2.31.2 Wärmeübergangskoeffizient und Wärmeübergangswiderstand
Mit obigen Annahmen folgt gemäß 5.1.2 direkt
( ) ( )4 4,
37 ,,
Rotor Joch GehäuseS Rotor Joch
Rotor Joch Gehäuse
T TC
T Tα ε
−= ⋅ ⋅
− . (5.214)
Es folgt somit für den Wärmeübergangswiderstand
,37,37 37
1K
thermisch
WO α
=⋅
. (5.215)

Matlabprogramm zur Berechnung der Temperaturverläufe 121
6. Matlabprogramm zur Berechnung der Temperaturverläufe
Die gemäß den Kapiteln 3 bis 5 aufgestellte Theorie zur Berechnung der Wärmeflüsse in der
Maschine kann aufgrund ihrer Komplexität nur durch ein Rechenprogramm ausgewertet wer-
den. Dieses Programm wurde mit Matlab als Unterprogramm des interaktiv zu nutzenden
Programmpakets PM4 entwickelt. Die folgenden Unterkapitel zeigen die Funktionalitäten
dieses Unterprogramms.
6.1 Berechnung der Temperaturverläufe
Bild 6.1 zeigt das interaktiv nutzbare Programmfenster.
Bild 6.1: Hauptfenster des Programms zur Berechnung der Temperaturverläufe in den Teil-
körpern der Maschine (hier für fiktive Parameter)
Im linken oberen Teil des Fensters werden die Länge des Berechnungsintervalls ν in tΔ und
die Gesamtzeit eingegeben. Diese Parameter haben starken Einfluss auf die Berechnungszeit

Matlabprogramm zur Berechnung der Temperaturverläufe 122
sowie auch auf die Berechnungsgenauigkeit des Berechnungsalgorithmus. Deshalb soll an
dieser Stelle anhand von Beispielrechnungen dokumentiert werden, inwieweit die Näherungs-
lösung des DGL-Systems gemäß Kapitel 3.3 Einfluss auf die Genauigkeit der Berechnung
hat. Bild 6.1a zeigt eine Beispielrechnung für ein Zweikörperproblem. Die Grafik zeigt in
Grün die exakte Lösung des DGL-Systems, die schwarzen und roten Verläufe zeigen die Nä-
herungsrechnungen gemäß Kapitel 3.3 mit Zeitintervallen von 50 Sekunden und 0,1 Sekun-
den. Die Grafik zeigt, dass sich die Verläufe fast decken.
0 20 40 60 80 100 120 140 160 180 200-10
0
10
20
30
40
50
60
70
80
Zeit in min →
Tem
pera
tur i
n °C
→
T1 (PM4, delta t = 50 sec)T2 (PM4, delta t = 50 sec)T1 (PM4, delta t = 0,1 sec)T2 (PM4, delta t = 0,1 sec)T1 (exakte Lösung)T2 (exakte Lösung)
Bild 6.1a: Vergleich der exakten Lösungen des DGL-Systems mit der Näherungslösung ge-
mäß Kapitel 3.3 für ein Zweikörperproblem
Die folgende Grafik zeigt nur die ersten zehn Minuten des Berechnungszeitraums.

Matlabprogramm zur Berechnung der Temperaturverläufe 123
0 1 2 3 4 5 6 7 8 9 10-5
0
5
10
15
20
25
Zeit in min →
Tem
pera
tur i
n °C
→
T1 (PM4, delta t = 50 sec)T2 (PM4, delta t = 50 sec)T1 (PM4, delta t = 0,1 sec)T2 (PM4, delta t = 0,1 sec)T1 (exakte Lösung)T2 (exakte Lösung)
Bild 6.1b: Vergleich der exakten Lösungen des DGL-Systems mit der Näherungslösung ge-
mäß Kapitel 3.3 für ein Zweikörperproblem (hier Zoom)
Die Grafik zeigt für den sich schnell erwärmenden Teilkörper eine geringe Abweichung von
der exakten Lösung für die Näherungsberechnung mit einem Zeitintervall von 50 Sekunden.
Für ein Zeitintervall von 0,1 Sekunden (wie auch in den Beispielrechnungen verwendet) zeigt
die Berechnung gemäß Kapitel 3.3 nur eine minimale Abweichung von der exakten Lösung.
Diese geringen Abweichungen der Näherungslösung sowie die in Kapitel 3.2 angesprochenen
Vorteile der Näherungslösung in der praktischen Umsetzung der Theorie führten zu dem
Schluss, die in Kapitel 3.3 dokumentierte Näherungslösung zu verwenden. Für Temperaturbe-
rechnungen mit sehr viel höheren Temperaturgradienten ist die Gültigkeit der Näherungslö-
sung ggf. erneut nachzuweisen.

Matlabprogramm zur Berechnung der Temperaturverläufe 124
6.2 Verlustberechnung / Schaltzeitpunkte
Bild 6.2 zeigt das interaktiv nutzbare Programmfenster.
Bild 6.2: Fenster des Programms zur Eingabe bzw. Berechnung der Verlustleistungen in der
Maschine sowie zur Eingabe der Schaltzeitpunkte
In diesem Programmfenster wird festgelegt, ob die Verlustleistungen, die in den Teilkörper
auftreten, für jedes Zeitintervall berechnet werden sollen oder ob konstante Werte eingegeben
werden sollen.
Die Eingabe der Schaltzeitpunkte legt fest, zu welchen Zeiten im Berechnungszeitraum die
Verlustquellen ab- bzw. angeschaltet werden. Sie beziehen sich jeweils auf alle Verlustleis-
tungen. Schaltzeitpunkte, die jenseits des Berechnungszeitraumes liegen, haben keinen Ein-
fluss auf die Berechnung.

Matlabprogramm zur Berechnung der Temperaturverläufe 125
6.3 Starttemperaturen
Bild 6.3 zeigt das interaktiv nutzbare Programmfenster.
Bild 6.3: Fenster des Programms zur Eingabe der Starttemperaturen der Teilkörper zu Be-
ginn des ersten Berechnungsintervalls
In diesem Fenster werden die konstante Umgebungstemperatur der Maschine sowie die mög-
licherweise von dieser abweichenden Temperaturen der Teilkörper zu Beginn des ersten Be-
rechnungsintervalls eingegeben.

Matlabprogramm zur Berechnung der Temperaturverläufe 126
6.4 Wärmeübergangswiderstände
Die Bilder 6.4 und 6.5 zeigen die interaktiv nutzbaren Programmfenster.
Bild 6.4: Fenster des Programms zur Eingabe bzw. Berechnung der Wärmeübergangskoeffi-
zienten und Wärmeübergangswiderstände 1-15

Matlabprogramm zur Berechnung der Temperaturverläufe 127
Bild 6.5: Fenster des Programms zur Eingabe bzw. Berechnung der Wärmeübergangskoeffi-
zienten und Wärmeübergangswiderstände 16-29
In diesen Fenstern wird für jeden Wärmeübergangswiderstand festgelegt, ob ein fester Wert
vorgegeben werden soll, ein Wärmeübergangskoeffizient vorgegeben werden soll oder ob der
Wärmeübergangswiderstand gemäß Kapitel 5 unter Einbeziehung der Geometrie- und Werk-
stoffdaten der Maschine temperaturabhängig berechnet werden soll.
Die numerischen Angaben für Wärmeübergangswiderstand sowie Wärmeübergangskoeffi-
zient beziehen sich bei Berechnung auf eine Temperaturverteilung von 20°C für den Teilkör-
per 1 sowie 40°C für den Teilkörper 2.
Bei Vorgabe des Wärmeübergangswiderstandes ist der angezeigte Wert des Wärmeüber-
gangskoeffizienten ohne Bedeutung.

Matlabprogramm zur Berechnung der Temperaturverläufe 128
6.5 Übergangsschichten bei Wärmeleitung
Bild 6.6 zeigt das interaktiv nutzbare Programmfenster.
Bild 6.6: Fenster des Programms zur Eingabe von Schichtdicke sowie Wärmeleitfähigkeit der
Wärmeübergangsschichten bei direktem Kontakt zwischen Teilkörpern
In diesem Fenster werden Schichtdicke und Wärmeleitfähigkeit von Zwischenschichten bei
direktem Kontakt von Teilkörpern festgelegt. Gemäß Kapitel 5.1.1 berechnet sich mit diesen
Parametern sowie der Kontaktfläche der entsprechende Wärmeübergangswiderstand.
Zusätzlich wird in diesem Fenster der Faktor KontaktF eingegeben, der angibt, wieviel Prozent
der Zylinderfläche des Statorjochs in direktem Kontakt zum Gehäuse stehen.

Matlabprogramm zur Berechnung der Temperaturverläufe 129
6.6 Strahlungsemissionsverhältnisse der Teilkörper
Bild 6.7 zeigt das interaktiv nutzbare Programmfenster.
Bild 6.7: Fenster des Programms zur Eingabe der Strahlungsemissionsverhältnisse
Die Strahlungsemissionsverhältnisse der Teilkörper zur Berechnung der strahlungsbedingten
Wärmeübergangswiderstände sind experimentell zu bestimmen bzw. angenähert der Literatur
zu entnehmen.

Matlabprogramm zur Berechnung der Temperaturverläufe 130
6.7 Eingabe und Berechnung der Wärmekapazitäten
Bild 6.8 zeigt das interaktiv nutzbare Programmfenster.
Bild 6.8: Fenster des Programms zur Eingabe bzw. Berechnung der Wärmekapazitäten
In diesem Fenster ist festzulegen, ob die Wärmekapazitäten der Teilkörper als fester Wert
eingegeben werden oder ob sie gemäß Kapitel 4 für jedes Berechnungsintervall temperaturab-
hängig berechnet werden.
Angezeigt wird die eingegebene Wärmekapazität oder die für 20°C berechnete Wärmekapazi-
tät des Teilkörpers.

Matlabprogramm zur Berechnung der Temperaturverläufe 131
6.8 Spezifische Wärmekapazitäten der Teilkörper
Bild 6.9 zeigt das interaktiv nutzbare Programmfenster.
Bild 6.9: Fenster des Programms zur Eingabe der temperaturabhängigen spezifischen Wär-
mekapazität der Teilkörper
Die Wärmekapazitäten werden im Programmablauf temperaturabhängig berechnet. Dies be-
dingt die Vorgabe der temperaturabhängigen spezifischen Wärmekapazität.
Dieses Fenster ermöglicht die Eingabe von beliebig vielen Wertepaaren bestehend aus Tem-
peratur in °C und der zugeordneten spezifischen Wärmekapazität. Im Programmablauf wird
abhängig von der Temperatur des Teilkörpers zwischen den angrenzenden Wertepaaren linear
interpoliert.

Matlabprogramm zur Berechnung der Temperaturverläufe 132
6.9 Einstrahlzahlen am Wickelkopf
Bild 6.10 zeigt das interaktiv nutzbare Programmfenster.
Bild 6.10: Fenster des Programms zur Eingabe der vorzugebenden Einstrahlzahlen
Gemäß Bild 5.8 müssen die Eigeneinstrahlzahlen von Gehäuse und Wickelkopf sowie das
Verhältnis von Abstrahlung des Gehäuses auf den Wickelkopf sowie des Gehäuses auf die
Stirnfläche des Statorjochs als Werte vorgegeben werden, da eine analytische Berechnung im
Regelfall nicht möglich ist. Diese Werte sind in diesem Fenster einzugeben.

Analytische Berechnung der Verlustleistungen in der Maschine 133
7. Analytische Berechnung der Verlustleistungen in der Maschine
Die gemäß den Kapiteln 3 bis 5 aufgestellte Theorie zur Berechnung der Wärmeflüsse in der
Maschine bedingt die Kenntnis der Verlustleistungen in der Maschine.
Die Verlustleistungen werden für die Temperaturberechnung entweder direkt als fester Wert
vorgegeben oder gemäß der Maschinentheorie für jeden Zeitschritt temperaturabhängig be-
rechnet.
Bei Berechnung von Temperaturverläufen einer bekannten Maschine ist die Vorgabe bekann-
ter Verlustdaten sinnvoll. Bei Berechnung einer fiktiven Maschine ist die Berechnung aus den
Geometrie- und Werkstoffdaten der Maschine notwendig. Die folgenden Unterkapitel zeigen
die Theorie zur Berechnung der einzelnen Verlustquellen.
7.1 Stromwärmeverluste in den Wicklungen
Die Stromwärmeverluste in den Statorwicklungen stellen die stärkste Verlustquelle im Motor
dar. Da die Wicklungsabschnitte in der Statornut und die Wicklungen am Stirnkopf separat
als Teilkörper betrachtet werden, ist auch eine getrennte Berechnung der Verlustquellen not-
wendig.
Das Berechnungsprogramm bietet die Möglichkeit der Vorgabe eines festen Stromwertes
(Gleichstrom oder symmetrisches Drehstromsystem).
Bei Stromwertvorgabe gilt für die Verluste im Ankerkreis:
( ) ( )2, , , ,Cu Nut Cu Nut A Cu Nut Cu NutP I Rϑ ϑ= ⋅ (7.1)
bzw.
( ) ( )2, , , ,Cu Stirn Cu Stirn A Cu Stirn Cu StirnP I Rϑ ϑ= ⋅ . (7.2)
( ) ( ) ( ), , , , , ,,Cu Nut Cu Nut Cu Stirn Cu Stirn Str Cu Nut Cu StirnR R Rϑ ϑ ϑ ϑ+ = (7.3)
Zu bestimmen ist somit der temperaturabhängige Strangwiderstand der Wicklung, aufgeteilt
auf Nut und Stirnkopf.

Analytische Berechnung der Verlustleistungen in der Maschine 134
Berechnung für verteilte Wicklungen:
Gemäß [13] gilt für den Strangwiderstand einer verteilten Wicklung
( ) ( ) ( )2,
1
1 11 20 2A Cu CU temp cu Cu S StCu
R w l lp q A
ϑ ρ α ϑ⎡ ⎤= ⋅ ⋅ + ⋅ − ⋅ ⋅ ⋅ + ⋅⎣ ⎦ ⋅ (7.4)
mit
Cu WA DrahtA K N A= ⋅ ⋅ , (7.5)
1WA
p qw N Ka⋅
= ⋅ ⋅ , (7.6)
( )41
12 12St Zl r l
p m qεπ γ
⎛ ⎞= ⋅ ⋅ + ⋅ ⋅ − ⋅⎜ ⎟⋅⎝ ⎠
. (7.7)
γ ist ein Erfahrungsfaktor, der die Längenabweichungen vom Idealmaß aufgrund der Wickel-
technik berücksichtigt.
Die Aufteilung auf Nut und Stirnkopf erfolgt gemäß
( ) ( ), , ,S
Cu Nut Cu Nut A Cu NutS St
lR Rl l
ϑ ϑ= ⋅+
(7.8)
( ) ( ), , ,St
Cu Stirn Cu Stirn A Cu StirnS St
lR Rl l
ϑ ϑ= ⋅+
(7.9)
Berechnung für konzentrierte Wicklungen:
Gemäß [11] gilt für den Strangwiderstand einer konzentrierten Wicklung
( ) ( ) ( )2,
1
11 20 2A Cu CU temp cu Cu S StWa Cu
aR w l lK p A
ϑ ρ α ϑ⎡ ⎤= ⋅ ⋅ + ⋅ − ⋅ ⋅ ⋅ + ⋅⎣ ⎦ ⋅ (7.10)
mit
Cu DrahtA N A= ⋅ , (7.11)

Analytische Berechnung der Verlustleistungen in der Maschine 135
1WA
pw N Ka
= ⋅ ⋅ , (7.12)
41
2 12N ZWZ ZK r l
Zπτ ⎛ ⎞= ⋅ ⋅ +⎜ ⎟
⎝ ⎠ , (7.13)
12N ZWZ ZWZ Sy b K bτ= − − ⋅ ⋅ ,
Stl y γ= ⋅ . (7.14)
γ ist ein Erfahrungsfaktor, der die Längenabweichungen vom Idealmaß aufgrund der Wickel-
technik berücksichtigt.
Die Aufteilung auf Nut und Stirnkopf erfolgt gemäß
( ) ( ), , ,S
Cu Nut Cu Nut A Cu NutS St
lR Rl l
ϑ ϑ= ⋅+
(7.15)
( ) ( ), , ,St
Cu Stirn Cu Stirn A Cu StirnS St
lR Rl l
ϑ ϑ= ⋅+
. (7.16)
7.2 Eisenverluste
Eisenverluste setzen sich aus Hystereseverlusten, Wirbelstromverlusten und sonstigen Eisen-
verlusten zusammen.
Eine analytische Berechnung der Eisenverluste ist nur näherungsweise möglich. Notwendig
ist im Regelfall die Kenntnis von spezifischen Verlusten in Abhängigkeit von magnetischer
Flussdichte und Ummagnetisierungsfrequenz. Desweiteren sind Korrekturfaktoren einzube-
ziehen, die der Literatur zu entnehmen sind.
Da die Bestimmung eines analytischen Verfahrens zur Berechnung der Eisenverluste nicht
Schwerpunkt dieser Arbeit ist, wird auf gebräuchliche Verfahren aus der Literatur zurückgeg-
riffen. Diese Verfahren werden im Rahmen dieser Arbeit nicht näher verifiziert. Sie werden
dem Programmnutzer zur Auswahl angeboten.
In der Literatur [32 - 35] sind unterschiedliche analytische Verfahren zur Berechnung der Ei-
senverluste aufgeführt.

Analytische Berechnung der Verlustleistungen in der Maschine 136
Alle Berechnungsverfahren bedingen die Kenntnis des Verlaufes der magnetischen Flussdich-
te im betrachteten Eisenabschnitt.
7.2.1 Magnetische Flussdichte im betrachteten Eisenabschnitt
Die Berechnung der magnetischen Flussdichte kann numerisch mit kommerziellen Program-
men oder analytisch durchgeführt werden.
In [28] ist ein Verfahren zur zweidimensionalen analytischen Berechnung magnetischer Fel-
der in permanentmagneterregten Maschinen aus Geometrie- und Werkstoffdaten beschrieben.
Der Algorithmus ist in Matlab programmiert und kann somit in die automatisierte Berechnung
der Temperaturverläufe in PM4 Thermo eingebunden werden.
7.2.1.1 Magnetische Flussdichte im Statorzahn
Für die Berechnung der Eisenverluste in den Zähnen wird mit [28] die Flussdichteverteilung
am Radius 4r berechnet. Hierbei werden sowohl Ankerfeld als auch Erregerfeld berücksich-
tigt. Berücksichtigt werden nur die Grundwellen. Bild 7.1 zeigt für den Modellmotor bei einer
Ankerspeisung von 2A die Flussdichteverteilung bei auf dem Statorbohrungsradius 4r .

Analytische Berechnung der Verlustleistungen in der Maschine 137
0 1 2 3 4 5 6 7-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
statorfester Winkel phi1 in rad
mag
netis
che
Flus
sdic
hte
Ankerfeld ortsfestErregerfeld ortsfest ohne Rotation
Bild 7.1: mit [28] analytisch berechnete Flussdichteverteilung bei r4 für einen festen Zeit-
punkt über dem statorfesten Winkel 1ϕ dargestellt, nur Grundwellenbetrachtung
Für das in Bild 7.1 dargestellte Erregerfeld gilt
( )( )1ˆ cosf f fB B p ϕ ϑ= ⋅ −
mit 0ϑ = .
Die dargestellte Verteilung des Ankerfeldes ergibt sich durch Gleichstromeinprägung in den
Statorsträngen mit
1
2
3
ˆ
ˆ0,5ˆ0,5
ˆ 2 3
I I
I I
I I
I A
= −
= ⋅
= ⋅
= ⋅
Bild 7.1 zeigt, daß die Flussdichteamplitude des Erregerfeldes sehr viel größer ist als die des
Ankerfeldes.
Die Rotation des Rotors führt dazu, daß Erregerfeld und Ankerfeld im Stator gleichfrequent
schwingen mit der Frequenz
Fe elektrischf f= . (7.17)

Analytische Berechnung der Verlustleistungen in der Maschine 138
Somit hat auch das Gesamtfeld aus Erregerfeld und Ankerfeld einen sinusförmigen Verlauf.
Der Einfluss des Nutenfeldes des Ankerfeldes wird vernachlässigt.
Für die gesamte radiale Flussdichte bei 4r gilt somit allgemein
( ) ( ) ( )4 1 2cos cosr A EB t A b t A c tω ω ϕ ω ϕ= ⋅ ⋅ + + ⋅ ⋅ + . (7.18)
1A ist die Flussdichteamplitude des Ankerfeldes bei 4r , 2A ist die Flussdichteamplitude des
Erregerfeldes bei 4r .
Aϕ ist der Verschiebungswinkel des Ankerfeldes bezogen auf 1ϕ , Eϕ ist der Verschiebungs-
winkel des Erregerfeldes bezogen auf 1ϕ .
Eine unmittelbare Berechnung der Zahnflussdichten mit [28] ist nicht möglich, da die Zähne
in dieser Theorie nur durch den Carterfaktor berücksichtigt sind.
Wenn davon ausgegangen wird, daß der gesamte Radialfluss von den Zähnen geführt wird,
kann die Zahnflussdichte durch Integration des Radialflusses bei 4r berechnet werden. Es gilt
somit mit
1
2Z Z
πϕ = (hier nur ohne Zwischenzähne) (7.19)
( )1Zφ ϕ ( )1
1
2
4 40
2
ZS
Z
l
rr B t d t dz
ϕϕ
ϕϕ
ω ω+
−
= ⋅ ∫ ∫
( ) ( )1 1
1 1
2 2
4 1 2
2 2
cos cos
Z Z
Z Z
S A Er l A b t d t A c t d t
ϕ ϕϕ ϕ
ϕ ϕϕ ϕ
ω ϕ ω ω ϕ ω+ +
− −
⎡ ⎤⎢ ⎥= ⋅ ⋅ ⋅ ⋅ + + ⋅ ⋅ +⎢ ⎥⎢ ⎥⎣ ⎦
∫ ∫
( ) ( )1 1
1 1
2 24 1 2
2 2
1 1sin sinZ Z
Z ZS A Er l A b t A c tb c
ϕ ϕϕ ϕ
ϕ ϕϕ ϕω ϕ ω ϕ
+ +
− −
⎧ ⎫= ⋅ ⋅ ⋅ ⋅ + + ⋅ ⋅ +⎡ ⎤ ⎡ ⎤⎨ ⎬⎣ ⎦ ⎣ ⎦
⎩ ⎭
4 1 1 11 sin sin
2 2Z Z
S A Ar l A b bb
ϕ ϕϕ ϕ ϕ ϕ⎡ ⎤⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞= ⋅ ⋅ ⋅ ⋅ ⋅ + + − ⋅ − +⎢ ⎥⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎣ ⎦
4 2 1 11 sin sin
2 2Z Z
S E Er l A c cc
ϕ ϕϕ ϕ ϕ ϕ⎡ ⎤⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞+ ⋅ ⋅ ⋅ ⋅ ⋅ + + − ⋅ − +⎢ ⎥⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎣ ⎦. (7.20)

Analytische Berechnung der Verlustleistungen in der Maschine 139
Für die weitere Betrachtung wird vorausgesetzt, daß es keine Phasenverschiebung zwischen
Ankerfeld und Erregerfeld gibt. Dies entspricht einem Polradwinkel von 0UPϕ = °.
Diese Annahme ist im Leerlauf zulässig. Für Belastungsfälle ist ggf. eine Erweiterung der
Theorie in Erwägung zu ziehen. Da allerdings gemäß Bild 7.1 die Erregerflussdichte sehr viel
größer ist als die Ankerfeldflussdichte, führt die Näherung auch bei Belastungsfällen zu ak-
zeptablen Fehlerabweichungen.
Es gilt somit
A iϕ ϕ π= = (Annahme, da der Stromwinkel keinen Einfluss auf die resultierende Ampli-
tude des Feldes hat) (7.21)
und
0E UPϕ ϕ= = ° . (7.22)
Weiterhin gilt
1
f
b pc p
==
(7.23)
Mit diesen Annahmen folgt für den Zahnfluss
( )1Zφ ϕ 4 1 1 1 1 11
1 sin sin2 2Z Z
Sr l A p pp
ϕ ϕϕ ϕ⎡ ⎤⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞= − ⋅ ⋅ ⋅ ⋅ ⋅ + − ⋅ −⎢ ⎥⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎣ ⎦
4 2 1 11 sin sin
2 2Z Z
S f ff
r l A p pp
ϕ ϕϕ ϕ⎡ ⎤⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞+ ⋅ ⋅ ⋅ ⋅ ⋅ + − ⋅ −⎢ ⎥⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎣ ⎦. (7.24)
Mit dem Additionstheorem
( ) ( )sin sin 2 cos sin2 2
α β α βα β + −− = ⋅ ⋅ (7.25)

Analytische Berechnung der Verlustleistungen in der Maschine 140
folgt
( )1Zφ ϕ ( )4 1 1 1 11
2 sin cos2Z
Sr l A p pp
ϕ ϕ⎛ ⎞= − ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅⎜ ⎟⎝ ⎠
( )4 1 11
2 sin cos2Z
S f fr l A p pp
ϕ ϕ⎛ ⎞+ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅⎜ ⎟⎝ ⎠
(7.26)
Zusätzlich ist die mechanische Rotation des Rotors mit einzurechnen. Diese führt dazu, daß
das Erregerfeld im Bezug auf den statorfesten Winkel 1ϕ mit derselben Winkelgeschwindig-
keit rotiert wie das Ankerfeld. Aus (7.26) folgt direkt
( )1Zφ ϕ ( )4 1 1 1 11
2 sin cos2Z
Sr l A p pp
ϕ ϕ⎛ ⎞= − ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅⎜ ⎟⎝ ⎠
( )4 1 1 11
2 sin cos2Z
S fr l A p pp
ϕ ϕ⎛ ⎞+ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅⎜ ⎟⎝ ⎠
. (7.27)
Es folgt somit für die Amplituden der Zahnflussdichte
4, 1 1
1
2ˆ sin2Z
Z AZ
rB A pp b
ϕ⎛ ⎞= ⋅ ⋅ ⋅ ⋅⎜ ⎟⎝ ⎠
(7.28)
4, 2
1
2ˆ sin2Z
Z E fZ
rB A pp b
ϕ⎛ ⎞= ⋅ ⋅ ⋅ ⋅⎜ ⎟⎝ ⎠
(7.29)
7.2.1.2 Magnetische Flussdichte im Statorjoch
Der Zugang zur Berechnung der magnetischen Flussdichte im Statorjoch sind die Zahnflüsse.
Für die Bestimmung der Jochflüsse ist die Kenntnis der mittleren Flussdichte in jedem Zahn
notwendig. Mit (7.28) folgt für den Zahn i
( )1Zφ ϕ ( )4 1 1 1 11
2 sin cos2Z
Sr l A p pp
ϕ ϕ⎛ ⎞= − ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅⎜ ⎟⎝ ⎠
( )4 1 1 11
2 sin cos2Z
S fr l A p pp
ϕ ϕ⎛ ⎞+ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅⎜ ⎟⎝ ⎠
. (7.30)

Analytische Berechnung der Verlustleistungen in der Maschine 141
Für den Winkel der Zahnmitte folgt
( )1, 11
2 1 ,1i i i ZZπϕ = ⋅ − ≤ ≤ . (7.31)
Ein Verschiebungswinkel ist nicht zu berücksichtigen, da für jede beliebige Rotorstellung der
gesamte Radialfluß durch Zähne und Statorjoch geführt wird. Somit ist auch im Statorjoch
eine sinusförmige Flussverteilung über 1ϕ anzunehmen. Die Amplitude dieser Flussdichtever-
teilung ist nicht vom Rotorstellungswinkel abhängig.
Zur Ermittlung der Flussdichte im Statorjoch ist das Statorjoch in Abschnitte zu unterteilen, in
denen konstante Flussdichte angenommen wird. Die Flussdichten werden dann über das Kno-
tenpotentialverfahren berechnet. Bild 7.2 zeigt die Bezeichnung der Flüsse und führt Vorzei-
chen für die Flüsse ein. Der Statorabschnitt links vom Knoten i ist der Statorabschnitt i, der
unterhalb des Knotens i liegende Zahn ist der Zahn i.
Bild 7.2: Flussknoten und Vorzeicheneinführung für Zahn- und Statorjochflüsse

Analytische Berechnung der Verlustleistungen in der Maschine 142
Gesucht ist die maximal auftretende Flussdichte im Statorjoch. Diese tritt in den sich an den
Zahn anschließenden Statorjochsegmenten auf, wenn Zahn und Magnetsegment sich optimal
überlagern. Ohne Verschiebungswinkel ist dies für den Zahn 1 der Fall.
Zur Bestimmung der Flussdichte in den benachbarten Statorsegmenten ist die Auswertung des
Flussnetzwerks gemäß Bild 7.2 notwendig.
Für den Knoten i gilt
, , 1 ,J i J i Z iφ φ φ+− = − . (7.32)
Dies führt auf folgendes lineares Gleichungssystem, hier beispielhaft für i = 5:
,1 ,1
,2 ,2
,3 ,3
,4 ,4
,5 ,5
1 1 0 0 00 1 1 0 00 0 1 1 00 0 0 1 11 0 0 0 1
J Z
J Z
J Z
J Z
J Z
φ φφ φφ φφ φφ φ
−− ⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ −− ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⋅ =−⎢ ⎥ ⎢ ⎥⎢ ⎥ −− ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ −−⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(7.33)
Das Gleichungssystem zeigt eine einfache Symmetrie. Die Lösung erfolgt in einem Matlabp-
rogramm für beliebige i.
Es folgt
,1 ,1,
1J J
S J S
Bl h
φ= ⋅⋅
(7.34)
mit
( ), 6 4J S Zh r r l= − + . (7.35)
Für den im Anhang beschriebenen Motor ergeben sich für einen Stromeffektivwert von 2A
bei 100Hz die folgenden Flussdichten. Zum Vergleich und zur Verifikation der vorstehenden
Berechnung sind die mit einem FEM-Programm berechneten Flussdichten mit aufgeführt.

Analytische Berechnung der Verlustleistungen in der Maschine 143
Abschnitt mittlere magnetische
Flussdichte gemäß (7.28)
mittlere magnetische
Flussdichte gemäß FEM
Zahn 1 0,828 T 0,82 T
Zahn 2 -0,414 T -0,4 T
Zahn 3 -0,414 T -0,4 T
Zahn 4 0,828 T 0,82 T
….
Jochabschnitt 1 0,166 T 0,164 T
Jochabschnitt 2 -0,166 T -0,164 T
Jochabschnitt 3 0 0
Jochabschnitt 4 0,166 T 0,164 T
….
Tabelle 7.1: Vergleich der berechneten Flussdichten mit FEM-Berechnung
Die folgenden Bilder zeigen die Zahnflussdichte über 1ϕ sowie die Feldverteilung des Erre-
gerfeldes bei 4r als Ergebnis der FEM-Berechnung.
0 50 100 150 200 250 300 350-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
statorfester Winkel phi1
Zahn
fluss
dich
te b
ei r=
35m
m
Bild 7.3: Mit FEM berechnete Flussdichteverteilung in den Statorzähnen

Analytis
B
Die Bild
der mag
liegt.
sche Berechn
Bild 7.4: Er
der 7.3 und
gnetischen F
nung der Ver
rregerfluss d
7.4 zeigen
Flussdichten
rlustleistunge
des Modellm
in Verbindu
n in Zähnen
en in der Ma
motors ber
ung mit Tab
n und Statorj
schine
rechnet mit F
belle 7.1, da
rjoch sehr na
FEM
aß die analy
ah an der FE
ytische Bere
EM-Berech
144
echnung
hnung

Analytische Berechnung der Verlustleistungen in der Maschine 145
7.3 Eisenverlustberechnung
Im Folgenden werden verschiedene Berechnungsverfahren vorgestellt, für die unterschiedli-
che Werkstoffdaten vorliegen müssen. Diese Berechnungsverfahren werden dem Programm-
nutzer im Berechnungsprgramm interaktiv zur Verfügung gestellt. Die quantitative Berech-
nung der Eisenverluste sowie ein Vergleich mit gemessenen Werten für die Versuchsmaschi-
ne ist Anhang A3 zu entnehmen. Zur Verifizierung des Modells zur Temperaturberechnung
wird auf die direkte Eingabe von messtechnisch bestimmten Eisenverlusten zurückgegriffen.
Die im folgenden dargestellten Berechnungsverfahren haben somit keine direkte Relevanz für
diese Arbeit, vervollständigen aber die Berechnungsmöglichkeiten des Programms und erlau-
ben die direkte Berechnung der Eisenverluste aus Geometrie- und Werkstoffdaten.
7.3.1 Vorgabe von spezifischen Verlusten getrennt nach Hystereseverlusten und Wirbelstromverlusten
Bei bekannten spezifischen Verlusten für Hysterese Hσ und Wirbelströme Wσ können die
Eisenverluste berechnet werden gemäß
22 ˆ
50 50 1,5Fe Fe Fe
Fe H H W W Fef f BP k k mHz Hz T
σ σ⎡ ⎤ ⎛ ⎞⎛ ⎞= ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅⎢ ⎥ ⎜ ⎟⎜ ⎟
⎝ ⎠⎢ ⎥ ⎝ ⎠⎣ ⎦ . (7.36)
Näheres zur Ableitung dieser Formel ist in [31,32,35] nachzulesen.
Die spezifischen Verluste müssen für den Betriebspunkt 50Hz/1,5T vorliegen. Die Angabe
der spezifischen Verluste für diesen Betriebspunkt ist üblich.
Den größten Einfluss auf den Korrekturfaktor Hk hat die rotierende Magnetisierung, aber
auch nicht sinusförmige Verläufe der Induktion sowie sind hier berücksichtigt.
Den größten Einfluss auf den Korrekturfaktor Wk hat die nicht gleichmäßige Verteilung der
magnetischen Flussdichte in Joch und Zahn. Ausserdem ist hier der Einfluss von Oberwellen
bei nicht sinusförmiger Induktion erfasst. Ausserdem gehen Bearbeitungseffekte der Bleche in
den Korrekturfaktor ein. Der Einfluss der rotierenden Magnetisierung ist hier nicht so stark
wie bei der Hysterese.

Analytische Berechnung der Verlustleistungen in der Maschine 146
Gemäß [31] S.341 sind in Einklang mit [36] S.174ff. und [32] S.25ff bei Synchronmaschinen
für sinusförmige magnetische Flussdichte folgende Korrekturfaktoren anzusetzen:
,
,
,
,
2,01,512,0 2,3
H Zahn
H Joch
W Zahn
W Joch
kkkk
=
=
=
= −
(7.37)
Die Korrekturfaktoren sind ggf. an die zu berechenende Maschine anzupassen. Sie können im
Allgemeinen nur empirisch erfasst werden, da sie einer Berechnung nur sehr bedingt zugäng-
lich sind.
7.3.2 Vorgabe von spezifischen Verlusten für Hysterese und Berechnung der Wirbelstromverluste
In Abwandlung zu 7.3.1 können die Wirbelstromverluste gemäß [31] S.342 ff. näherungswei-
se berechnet werden mit
( )22 2,
1 ˆ224
FeFe W Blech Fe Fe Fe
Fe
P d f B mχ πρ
= ⋅ ⋅ ⋅ ⋅ ⋅ . (7.38)
Feχ bezeichnet die elektrische Leitfähigkeit des Eisenmaterials.
2
,
ˆ
50 1,5Fe Fe
Fe H H Fe Fe Wf BP k m PHz T
σ⎛ ⎞
= ⋅ ⋅ ⋅ ⋅ +⎜ ⎟⎝ ⎠
. (7.39)
Im Übrigen gelten die unter 7.3.1 gemachten Angaben.

Analytische Berechnung der Verlustleistungen in der Maschine 147
7.3.3 Vorgabe von spezifischen Gesamtverlusten
In Abwandlung zu 7.3.1 werden oftmals nur spezifische Gesamtverluste für den Eisenwerk-
stoff angegeben. Bei Vorliegen von Verlustkennlinien kann durch Bestimmen einer Aus-
gleichsfunktion bestehend aus einem frequenzproportionalen Anteil (Hysterese) und einem
quadratischen Anteil (Wirbelstrom) die Aufsplittung in spezifische Hystereseverluste und
spezifische Wirbelstromverluste gelingen. Näheres hierzu ist auch in [31] S.32 f. nachzulesen.
Bei Angabe der spezifischen Gesamtverluste für den Arbeitspunkt 50Hz/1,5T gelingt diese
Aufteilung nicht. Die Eisenverluste sind näherungsweise berechenbar mit
2ˆ
1,5Fe
Fe G G FeBP k m
Tσ
⎛ ⎞= ⋅ ⋅ ⋅⎜ ⎟
⎝ ⎠ . (7.40)
Für die spezifischen Gesamtverluste Gσ ist eine Referenzfrequenz anzugeben, im Regelfall
50Hz. Nur in einem festzulegenden Bereich um diese Referenzfrequenz gibt (7.40) ausrei-
chend genaue Ergebnisse.
Der Gesamtkorrekturfaktor Gk ist aus den Einzelverlustfaktoren gemäß 7.2.1 abzuschätzen.
Für stark abweichende Frequenzen ist eine Abschätzung vorzunehmen, in welchem Verhältnis
sich die spezifischen Verluste auf Hysterese und Wirbelstrom aufteilen. Mit dieser Abschät-
zung kann dann (7.36) genutzt werden.
7.3.4 Vorgabe von spezifischen Verlusten getrennt nach Hystereseverlusten und Wirbelstromverlusten und Vorgabe der Exponenten für Frequenzabhängig-keit der Wirbelströme und Flussdichteabhängigkeit
Bisher wurde stets angenommen, daß die Wirbelstromverluste eine quadratische Abhängig-
keit von der Frequenz haben. Dies trifft aber in hohen Frequenzbereichen sowie bei nichtsi-
nusförmigen Flussdichteverläufen nicht zu. Deshalb kann eine Anpassung des Exponenten
sinnvoll sein.
Auch die quadratische Abhängigkeit der Verluste von der magnetischen Flussdichte ist nicht
für alle Frequenzen gültig. Deshalb kann auch hier eine Anpassung des Exponenten sinnvoll
sein.

Analytische Berechnung der Verlustleistungen in der Maschine 148
Desweiteren bietet die flexible Anpassung der Exponenten die Möglichkeit, genaue Aus-
gleichsfunktionen für vorhandene Verlustkennlinien zu bestimmen.
In Abwandlung zu 7.3.1 folgt somit
21 ˆ
50 50 1,5
xxFe Fe Fe
Fe H H W W Fef f BP k k mHz Hz T
σ σ⎡ ⎤ ⎛ ⎞⎛ ⎞= ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅⎢ ⎥ ⎜ ⎟⎜ ⎟
⎝ ⎠⎢ ⎥ ⎝ ⎠⎣ ⎦. (7.41)
im Übrigen gelten die in 7.3.1 gemachten Angaben.
7.3.5 Berechnung der Eisenverluste gemäß [27]
In [27] ist ein Berechnungsverfahren zur Berechnung der Eisenverluste über die Verlustziffer
( ),Fe FeB fν beschrieben.
Die Berechnung ist allerdings auf den Werkstoff HF20 der Firma EBG spezialisiert und resul-
tiert aus den Verlustkennlinien dieses Werkstoffs.
Für die Eisenverluste eines homogenen Eisenabschnitts gilt
( ),Fe Fe Fe FeP B f mν= ⋅ (7.42)
Die Verlustziffer ist abhängig von Frequenz und Flussdichteamplitude. Für das Eisenblech
HF20 EBG wurde in [30] experimentell folgende Abhängigkeit der Verlustziffer von Fre-
quenz und Flussdichteamplitude abgeleitet:
1000 ˆ200,066 500Zahn
d fBα χ
βν ⋅⎛ ⎞ ⎛ ⎞= ⋅ ⋅ ⋅⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠ (7.43)
mit

Analytische Berechnung der Verlustleistungen in der Maschine 149
10000.09 0.27 log0.066
dα ⋅= + ⋅ (7.44)
( )41,68 1000 10 0,62d fβ −= + ⋅ ⋅ ⋅ + (7.45)
0,6 45,54 0,18 log500
fdχ = + ⋅ + ⋅ . (7.46)
Mögliche Gültigkeitsgrenzen obiger Formel sind jeweils zu betrachten und ggf. experimentell
bestimmte Werte für die Eisenverluste anzugeben.
7.3.6 Unterprogramm zur Berechnung der Eisenverluste
Die Berechnung der Eisenverluste erfolgt unabhängig vom Algorithmus der Temperaturbe-
rechnung in einem eigenen Unterprogramm. In die Berechnung der Temperaturverläufe gehen
die Eisenverluste als konstante temperaturunabhängige Werte ein.
Bild 7.5 zeigt das Programmfenster.
Bild 7.5: Unterprogramm zur Berechnung der Eisenverluste in PM4 Thermo

Analytische Berechnung der Verlustleistungen in der Maschine 150
7.4 Reibungsverluste
Bei Rotation entstehen in den Wellenlagern Reibungsverluste. Eine analytische Berechnung
der Lagerverluste ist im Regelfall nicht möglich. Die messtechnische Bestimmung der Rei-
bungsverluste ist Anhang A3 zu entnehmen.

Beispielrechnungen und Vergleich mit Messungen 151
8. Beispielrechnungen und Vergleich mit Messungen
Ziel dieses Kapitels ist es, das aufgestellte Wärmeflussmodell durch Beispielrechnungen und
deren Vergleich mit Messungen zu verifizieren.
Alle Beispielrechnungen wurden mit einem Berechnungsintervall von 0.1 Sekunden durchge-
führt.
8.1 Beispielrechnungen für den Modellmotor mit Gleichstromspeisung
Der Modellmotor ist ein permanentmagneterregter Innenläufermotor. Seine Geometrie- und
Werkstoffdaten gemäß genutztem Datensatz im Berechnungsprogramm sind dem Anhang A1
zu entnehmen. Bild 8.1 zeigt Stator und Rotor des Modellmotors eingespannt in einer Halte-
vorrichtung, die möglichst viel freie Konvektion am Motor zulässt. Nähere Informationen zur
Haltevorrichtung sind [25] zu entnehmen.
Bild 8.1 Versuchsanordnung für Temperaturmessungen am Modellmotor gemäß [25]
Im Folgenden wird zunächst nur der Stator mit eingelegter Wicklung betrachtet, der Rotor
wurde entfernt, ein Gehäuse ist nicht vorhanden.

Beispielrechnungen und Vergleich mit Messungen 152
Die Beschreibung der Versuchsanordnung sowie die Messwerterfassung und -verarbeitung
sind [25] zu entnehmen.
Da zwischen dem Kupfer in der Nut und dem Kupfer am Wickelkopf ein zu vernachlässigen-
der Wärmeübergangswiderstand angenommen wurde, ergibt die Berechnung identische Tem-
peraturverläufe für diese Teilkörper. Gleiches gilt für das Eisen der Statorzähne und das Eisen
des Statorjochs. Die Berechnung gemäß vorstehender Theorie berücksichtigt außerdem keine
Temperaturunterschiede innerhalb eines Teilkörpers. In der Messung wurden die Temperatur-
unterschiede zwischen Unter- und Oberseite der Maschine sowie zwischen Kupfer unten und
Kupfer oben erfasst. Näheres hierzu sowie zur genauen Lage der Messfühler ist [25] zu ent-
nehmen.
Vorzugebene Werte für Strahlungsemissionskoeffizienten und den Wärmeübergang von der
Wicklung in der Nut auf Statorjoch und Statorzahn, die analytisch nicht berechenbar sind und
somit im Berechnungsprogramm Vorgabewerte sind, sind messtechnisch ermittelt worden
und in [25] dokumentiert und sind dem Anhang A1 zu entnehmen. Mit den in Anhang A1
dokumentierten Vorgabewerten ist die Reproduzierbarkeit der im Folgenden dokumentierten
Berechnungen sichergestellt.
8.1.1 Temperaturverläufe bei Gleichstromeinprägung ohne Rotor
Die Gleichstromeinprägung stellt gegenüber der Wechselstromeinprägung den weniger komp-
lexen Fall dar, da hier keine Eisenverluste auftreten und somit nur die Stromwärmeverluste in
den Statorwicklungen als Verlustquellen in Erscheinung treten.
Die Verifikationsmessung wurde zunächst ohne Rotor durchgeführt.
Messung und Berechnung wurden für unterschiedliche Effektivwerte des Stromes durchge-
führt.
In den folgenden Grafiken sind die berechneten Verläufe für Wicklung und Eisen rot darges-
tellt, wobei die Wicklung stets die höhere Temperatur aufweist.
Die Temperaturverläufe eines Teilkörpers auf Ober- und Unterseite der Maschine sind in
gleicher Farbe dargestellt, wobei auf der Oberseite der Maschine erwartungsgemäß stets die
höheren Temperaturen auftreten.

Beispielrechnungen und Vergleich mit Messungen 153
Bild 8.2: Berechnete und gemessene Temperaturverläufe für 2A DC
0 0,5 1 1,5 2 2,5 3 3,5 4 4,520
30
40
50
60
70
80
90
Zeit in Stunden
Tem
pera
tur i
n G
rad
Cels
ius
Messung Kupfer obenMessung Kupfer untenMessung Eisen obenMessung Eisen untenBerechnung KupferBerechnung Eisen

Beispielrechnungen und Vergleich mit Messungen 154
0 1 2 3 4 5 620
30
40
50
60
70
80
90
Zeit in Stunden
Tem
pera
tur i
n G
rad
Cels
ius
Messung Kupfer obenMessung Kupfer untenMessung Eisen obenMessung Eisen untenBerechnung KupferBerechnung Eisen
Bild 8.3: Berechnete und gemessene Temperaturverläufe für 2A DC mit Stromunterbrechung

Beispielrechnungen und Vergleich mit Messungen 155
0 0.5 1 1.5 2 2.5 3 3.5 4 4.520
40
60
80
100
120
140
160
180
Zeit in Stunden
Tem
pera
tur i
n G
rad
Cels
ius
Messung Kupfer obenMessung Kupfer untenMessung Eisen obenMessung Eisen untenBerechnung KupferBerechnung Eisen
Bild 8.4: Berechnete und gemessene Temperaturverläufe für 3A DC

Beispielrechnungen und Vergleich mit Messungen 156
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.420
40
60
80
100
120
140
160
180
Zeit in Stunden
Tem
pera
tur i
n G
rad
Cels
ius
Messung Kupfer obenMessung Kupfer untenMessung Eisen obenMessung Eisen untenBerechnung KupferBerechnung Eisen
Bild 8.5: Berechnete und gemessene Temperaturverläufe für 4A DC

Beispielrechnungen und Vergleich mit Messungen 157
Die Abweichung der gemessenen und berechneten Werte nimmt mit zunehmendem Strom zu.
Alle Grafiken zeigen, daß die berechneten Werte recht nah an den gemessenen Werten liegen.
Ungenauigkeiten ergeben sich in der Berechnung durch vereinfachte Annahmen in der Theo-
rie sowie durch Abweichungen bei der Vorgabe von Werten. Hierfür seien zwei Beispiele
genannt:
Die Einstrahzahl des Wickelkopfes auf sich selbst WK WKϕ ↔ kann analytisch nicht berechnet
werden, sondern muss abgeschätzt werden. Der obigen Berechnung liegt ein Wert von 0,1
zugrunde. Bei Reduzierung dieses Wertes auf 0,05 ergibt sich bei der berechneten Endtempe-
ratur des Kupfers bei 2A DC eine Abweichung von 1,5K.
Als weiteres Beispiel seien die Strahlungsemissionskoeffizenten genannt. Aufgrund unter-
schiedlicher Materialeigenschaften ergeben sich hier große Streuungen. Bei der messtechni-
schen Bestimmung des Wertes für das Statoreisen wurde ein Bereich von 0,39 bis 0,45 be-
stimmt (siehe [25]). Der obigen Berechnung liegt ein Wert von 0,45 zugrunde. Eine Änderung
des Wertes auf 0,39 führt bei 2A DC zu 1K Abweichung bei der Endtemperatur des Statorei-
sens.
Diese Beispiele sowie die Anzahl der Eingabewerte, die fehlerbehaftet sind, zeigen die Unsi-
cherheiten in der Berechnung. Vor diesem Hintergrund sind die erzielten Ergebnisse als abso-
lut zufriedenstellend anzusehen.
8.1.2 Temperaturverläufe bei Gleichstromeinprägung mit Rotor
Die Messung wurde für die unter 8.1.1 beschriebenen Messbedingungen durchgeführt, aller-
dings mit nicht rotierendem Rotor. Zusätzlich zu 8.1.1 wurden die Temperaturverläufe der
Teilkörper im Rotor aufgenommen (außer Rotorwelle) und mit der Berechnung verglichen.
Die folgenden Grafiken zeigen die berechneten und gemessenen Temperaturverläufe für ver-
schiedene Stromwerte.

Beispielrechnungen und Vergleich mit Messungen 158
0 1 2 3 4 5 6 720
30
40
50
60
70
80
Zeit in Stunden
Tem
pera
tur i
n G
rad
Cel
sius
Messung Kupfer obenMessung Kupfer untenMessung Eisen obenMessung Eisen untenMessung PM-MagneteMessung Eisen RotorMessung UmgebungstemperaturBerechnung KupferBerechnung Eisen Stator/ZähneBerechnung PM-MagneteBerechnung Eisen RotorBerechnung Umgebungstemperatur
Bild 8.6: Berechnete und gemessene Temperaturverläufe für 2A DC (mit Rotor im Stillstand)

Beispielrechnungen und Vergleich mit Messungen 159
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.520
30
40
50
60
70
80
Zeit in Stunden
Tem
pera
tur i
n G
rad
Cel
sius
Messung Kupfer obenMessung Kupfer untenMessung Eisen obenMessung Eisen untenMessung PM-MagneteMessung Eisen RotorMessung UmgebungstemperaturBerechnung KupferBerechnung Eisen Stator/ZähneBerechnung PM-MagneteBerechnung Eisen RotorBerechnung Umgebungstemperatur
Bild 8.7: Berechnete und gemessene Temperaturverläufe für 2A DC (mit Rotor im Stillstand)

Beispielrechnungen und Vergleich mit Messungen 160
0 1 2 3 4 5 6 720
40
60
80
100
120
140
160
Zeit in Stunden
Tem
pera
tur i
n G
rad
Cel
sius
Messung Kupfer obenMessung Kupfer untenMessung Eisen obenMessung Eisen untenMessung PM-MagneteMessung Eisen RotorMessung UmgebungstemperaturBerechnung KupferBerechnung Eisen Stator/ZähneBerechnung PM-MagneteBerechnung Eisen RotorBerechnung Umgebungstemperatur
Bild 8.8: Berechnete und gemessene Temperaturverläufe für 3A DC (mit Rotor im Stillstand)

Beispielrechnungen und Vergleich mit Messungen 161
Bild 8.9: Berechnete und gemessene Temperaturverläufe für 4A DC (mit Rotor im Stillstand)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.4520
40
60
80
100
120
140
160
180
Zeit in Stunden
Tem
pera
tur
in G
rad
Cel
sius
Messung Kupfer obenMessung Kupfer untenMessung Eisen obenMessung Eisen untenMessung PM-MagneteMessung Eisen RotorMessung WelleMessung UmgebungstemperaturBerechnung KupferBerechnung Eisen Stator/ZähneBerechnung PM-MagneteBerechnung Eisen Rotor

Beispielrechnungen und Vergleich mit Messungen 162
Der Vergleich von Berechnung und Messung zeigt, daß auch nach Einsetzen des Rotors die
Temperaturverläufe in den Teilkörpern des Motors gut berechnet werden können. Auch die
Berechnung der Wärmeübergänge über den Luftspalt auf den Rotor liefert gute Ergebnisse.
Die Modellierung des Luftspaltes als konzentrischer Ringspalt sowie die Annäherung des
Wärmeübergangs vom Luftspalt auf das Kühlmittel im Gehäuse durch einen konvektiven
Wärmeübergang ist offensichtlich eine gute Annäherung der realen Verhältnisse.
8.2 Beispielrechnungen für den Modellmotor mit Wechselstromspeisung und Rotation
Ein Vergleich von Berechnungen mit freier Konvektion gemäß Kapitel 5 mit Messungen am
rotierenden Motor soll Aufschluss darüber geben, inwieweit die Annahme freier Konvektion
auch bei rotierendem Rotor gerechtfertigt ist.
Bei Wechselstromspeisung werden zusätzlich zu den Stromwärmeverlusten in den Wicklun-
gen Ummagnetisierungsverluste und Wirbelstromverluste im Statoreisen wirksam.
Die Berechnung dieser Verluste ist im Kapitel 7.2 sowie im Anhang A3 beschrieben.
Es wurden für die Messung die unter 8.1 beschriebenen Messbedingungen hergestellt und
Effektivwerte des Stromes eingestellt, die einen direkten Vergleich mit der Gleichstrommes-
sung erlauben.
Die folgenden Grafiken zeigen berechnete und gemessene Temperaturverläufe für verschie-
dene Frequenzen und Stromeffektivwerte.

Beispielrechnungen und Vergleich mit Messungen 163
1 2 3 4 5 6 720
30
40
50
60
70
80
90
Zeit in Stunden
Tem
pera
tur i
n G
rad
Cel
sius
Messung Kupfer obenMessung Kupfer untenMessung Eisen obenMessung Eisen untenMessung PM-MagneteMessung Eisen RotorMessung WelleMessung UmgebungstemperaturBerechnung KupferBerechnung Eisen Stator/ZähneBerechnung PM-MagneteBerechnung Eisen RotorBerechnung WelleBerechnung Umgebungstemperatur
Bild 8.10: Berechnete und gemessene Temperaturverläufe für 2A AC mit 30Hz Speisefrequenz (mit Rotation)

Beispielrechnungen und Vergleich mit Messungen 164
0 1 2 3 4 5 6 720
40
60
80
100
120
140
160
Zeit in Stunden
Tem
pera
tur i
n G
rad
Cel
sius
Messung Kupfer obenMessung Kupfer untenMessung Eisen obenMessung Eisen untenMessung PM-MagneteMessung Eisen RotorMessung WelleMessung UmgebungstemperaturBerechnung KupferBerechnung Eisen Stator/ZähneBerechnung PM-MagneteBerechnung Eisen RotorBerechnung WelleBerechnung Umgebungstemperatur
Bild 8.11: Berechnete und gemessene Temperaturverläufe für 3A AC mit 30Hz Speisefrequenz (mit Rotation)

Beispielrechnungen und Vergleich mit Messungen 165
0 1 2 3 4 5 6 720
40
60
80
100
120
140
160
Zeit in Stunden
Tem
pera
tur i
n G
rad
Cel
sius
Messung Kupfer obenMessung Kupfer untenMessung Eisen obenMessung Eisen untenMessung PM-MagneteMessung Eisen RotorMessung WelleMessung UmgebungstemperaturBerechnung KupferBerechnung Eisen Stator/ZähneBerechnung PM-MagneteBerechnung Eisen RotorBerechnung WelleBerechnung Umgebungstemperatur
Bild 8.12: Berechnete und gemessene Temperaturverläufe für 3A AC mit 80Hz Speisefrequenz (mit Rotation)

Beispielrechnungen und Vergleich mit Messungen 166
Der Vergleich der Messungen mit Rotation zeigt, dass die Temperaturen der Teilkörper mit
steigender Frequenz größer werden. Dies liegt an unterschiedlichen Verlusten.
Zudem haben die folgenden Ursachen Einfluss:
1. Einfluss der erzwungenen Rotation auf die Wärmeübergangswiderstände
2. Änderung der Strömungsverhältnisse im Luftspalt
Der Vergleich der berechneten Temperaturverläufe mit den gemessenen Temperaturverläufen
zeigt, dass auch für Messungen mit rotierendem Rotor die Annahme von freier Konvektion zu
sehr guten Ergebnissen führt.
Die messtechnische Verifizierung zeigt, dass das aufgestellte analytische Modell ausreichend
genaue Vorhersagen für die Dimensionierung von Maschinen liefern kann.

Zusammenfassung und Ausblick 167
9. Zusammenfassung und Ausblick
In den vorstehenden Kapiteln wurde ein analytisches Verfahren zur Berechnung von thermi-
schen Vorgängen in permanentmagneterregten Maschinen entwickelt. Im ersten Teil wird ein
mathematischer Algorithmus entwickelt, der eine Auswertung des DGL-Systems der Teilkör-
pertemperaturen für temperaturabhängige Koeffizienten (Wärmeübergangswiderstände,
Wärmekapazitäten, Leistungen) mittels eines Matlabprogramms ermöglicht. Im zweiten Teil
werden die Wärmekapazitäten und die Wärmeübergangswiderstände zwischen den Teilkör-
pern des Motors berechnet. Allein die analytische Annäherung der Geometrie stellt hier eine
große Herausforderung dar und führt häufig zu notwendigen Vereinfachungen der Geometrie.
Die Berechnung der Wärmeübergangswiderstände zeigt das komplexe Zusammenspiel zwi-
schen Konvektion, Wärmeleitung und Strahlung auf.
Die Beispielrechnungen zeigen, dass die Theorie des konvektiven Wärmeübergangs im Luft-
spalt mit Einbeziehung der Nutschlitzöffnungen sinnvolle Ergebnisse liefert.
Desweiteren belegen die Vergleiche mit Temperaturmessungen, dass die Annahme laminarer
Strömung auch bei Rotation gerechtfertigt ist und zu zufriedenstellenden Ergebnissen führt.
Im weiteren Verlauf der Arbeit werden Verfahren zur Berechnung der Eisenverluste aus be-
kannten Werkstoffdaten vorgestellt. Der Vergleich mit Messungen der Eisenverluste zeigt
allerdings, dass die berechneten Werte noch stark von den gemessenen Werten abweichen.
Parallel zur Erarbeitung des theoretischen Modells wurde ein Matlabprogramm zur Auswer-
tung des Algorithmus entwickelt. Dieses Programm ermöglicht im dritten Teil der Arbeit den
Vergleich von berechneten Temperaturverläufen mit gemessenen Temperaturverläufen für
einen Beispielmotor. Die Ergebnisse zeigen, dass die berechneten Temperaturverläufe trotz
zahlreicher notwendiger Vereinfachungen im Rechenalgorithmus nah an den gemessenen
Werten liegen und zu sinnvollen Ergebnissen führen. Die Vergleichsmessungen belegen somit
die Nutzbarkeit des aufgestellten Modells.
Die Messungen der Temperaturverläufe am Beispielmotor sowie die detailierte Beschreibung
der Programmierung des Berechnungsprogramms sind nicht Teil dieser Arbeit, können aber
in den im Literaturverzeichnis aufgeführten Schriften nachgelesen werden.
Der jetzige Stand dieser Arbeit bietet vielfältige Möglichkeiten der Fortführung. So ist z.B.
die Berechnung der Eisenverluste in der Maschine ein Faktor, der einer tiefergehenden Be-
trachtung bedarf.
Die Einbeziehung des Maschinengehäuses ist im Rechenprogramm implementiert, wurde aber
nicht im Rahmen der Verifikationsmessungen mit einbezogen.

Zusammenfassung und Ausblick 168
Die weitere Verifikation des Berechnungsmodells mit Temperaturmessungen und –
berechnungen für weitere Motoren ist anzustreben.
Auch die axiale Temperaturverteilung in einer elektrischen Maschine ist ein Punkt, der im
nächsten Bearbeitungsschritt einbezogen werden sollte. Entsprechende theoretische Ansätze
sind im Rahmen dieser Arbeit vorangetrieben worden (werden hier aber nicht dokumentiert)
und zeigen einen Weg zur sinnvollen Fortsetzung dieser Arbeit auf.

Literaturverzeichnis 169
10. Literaturverzeichnis
[1] E.Bolte, Vorlesungsskipt EMA I-III, Helmut-Schmidt-Universität Hamburg, Ham-
burg, März 2008 [2] E.Bolte, J.Halfmann, Transiente thermische Analyse eines Permanetmagnetmotor-
Antriebs mit integriertem elektronischen Kommutator Philips Research, Laborbericht Nr. 1001/93 [3] VDI-Gesellschaft Verfahrenstechnik und Chemieingenieurwesen, VDI-Wärmeatlas –
Berechnungsblätter für den Wärmeübergang, 8.Auflage, Springer-Verlag, 1997 [4] G.Gotter, Erwärmung und Kühlung elektrischer Maschinen, Springer-Verlag, Berlin, 1954 [5] H.Herwig, Wärmeübertragung A-Z – systematische und ausführliche Erläuterungen wichtiger Größen und Konzepte, Springer-Verlag, Heidelberg, 2000 [6] G.Cerbe, G.Wilhelms, Technische Thermodynamik – theoretische Grundlagen und praktische Anwendungen, Hanser Verlag, München, 2005 [7] H.Baehr, S.Kabelac, Wärme- und Stoffübertragung, 5.Auflage, Springer-Verlag, Heidelberg, 1994 [8] F.Incropera, D.de Witt, Fundamentals of Heat and Mass Transfer, 2.Edition, Viley Verlag, New York, 1981 [9] O.Schepp, Simulations- und Messmethoden zur Bestimmung der Temperatur von Leistung-MOSFET´s, Fortschrittsberichte VDI Reihe 9 Nr.282, München, 1998 [10] B.Baier, Untersuchung von Rissbildungen in der Synchronmaschine des Maschinen satzes E1 im Umformerwerk der DB Energie GmbH in Hamburg-Harburg, Studien arbeit, EMA-Professur Helmut-Schmidt-Universität Hamburg, Hamburg, 2005
[11] E.Bolte, B.Kipp, Bestimmung der Maschinenparameter einer permanentmagneterreg ten Maschine mit konzentrierten Wicklungen, Technischer Bericht Nr.34, EMA- Pro fessur Helmut-Schmidt-Universität Hamburg, Hamburg, 2005

Literaturverzeichnis 170
[12] B.Kipp, Software zur Dimensionierung und Simulation von permanentmagneterregten Synchronmaschinen, Diplomarbeit, EMA-Professur Helmut-Schmidt-Universität Hamburg, Hamburg, 2003 [13] E.Bolte, Auslegung von permanentmagneterregten Maschinen mit radialer Flussorien tierung, Technischer Bericht Nr.27, EMA-Professur Helmut-Schmidt-Universität Hamburg, Hamburg, 2006 [14] W.Polifke, J.Kopitz, Wärmeübertragung - Grundlagen, analytische und numerische Methoden, Pearson Studium, München, 2005 [15] R.Siegel, J.Howell, Thermal Radiation Heat Transfer, McGraw-Hill, New York, 1972 [16] R.Siegel, J.Howell, J.Lohrengel, Wärmeübertragung durch Strahlung Teil 2: Strahlungsaustausch zwischen Oberflächen und in Umhüllungen, Springer-Verlag, Berlin, 1991 [17] J.Howell, Online Catalog of Radiation Heat Transfer Configuration Factors
http://www.me.utexas.edu/~howell/index.html? [18] G.Merker, Konvektive Wärmeübertragung, Springer-Verlag, Berlin, 1987 [19] M.Kaviany, Principles of Convective Heat Transfer, Mechanical Engineering Series, Springer-Verlag, New York, 2001 [20] B.Hanel, Einführung in die konvektive Wärme- und Stoffübertragung, Verl. Technik, 1.Auflage, Berlin, 1990 [21] M.Jaletzky, Über die Stabilität von thermisch getriebenen Strömungen im rotierenden konzentrischen Ringspalt, Dissertation, Universität Bayreuth, 1999 [22] R.Richter, Elektrische Maschinen - Band 1: Allgemeine Berechnungselemente – Die Gleichstrommaschinen, 3. erw. Auflage, Birkhäuser, Basel, 1967 [23] G.Müller, B.Ponick, Grundlagen elektrischer Maschinen, 9.Auflage, Wiley-VCH, Weinheim, 2006

Literaturverzeichnis 171
[24] T.Leifke, Entwurf eines Motors mit Dauermagneterregung, Studienarbeit, EMA- Pro- fessur Helmut-Schmidt-Universität Hamburg, Hamburg, 2006 [25] T.Leifke, Thermisches Verhalten von permanentmagneterregten Maschinen, Diplom- arbeit, EMA-Professur Helmut-Schmidt-Universität Hamburg, Hamburg, 2007 [26] E.Bolte, E. Bolte, N. Landskron, K.Schlüter, F.Schmidtke, F.Schwieger, Modellmotor II, Technischer Bericht Nr.38, EMA-Professur Helmut-Schmidt-Universität Hamburg, Hamburg, 2008 [27] E.Bolte, Konzeptstudie und Entwurfsauslegung eines Asynchronmotors für die Ver- wendung als elektrischer Hilfslader (ETV), Technischer Bericht Nr.22,
EMA-Professur Helmut-Schmidt-Universität Hamburg, Hamburg, 2001 [28] J.Peschke, Analytische Berechnung magnetischer Felder in permanentmagneterregten Maschinen, Dissertation, EMA-Professur Helmut-Schmidt-Universität Hamburg, Hamburg, 2006 [30] G.Konstas, Entwicklung einer Asynchron-Klein-Maschine für Drehzahlen bis 315.000 1min− , Dissertation, Universität Stuttgart, Stuttgart, 1980 [31] K.Vogt, Berechnung elektrischer Maschinen, VCH, Weinheim, 1996 [32] Z. Neuschl, Rechnerunterstützte experimentelle Verfahren zur Bestimmung der last- unabhängigen Eisenverluste in permanentmagnetisch erregten elektrischen Maschinen mit additionalem Axialfluss, Dissertation, Brandenburgische Technische Universität Cottbus, Hannover, 2007 [33] G.Bertotti, General Properties of Power Losses in Soft Ferromagnetic Materials, IEEE Transactions On Magnetics, Vol. 24.1 S.621ff., 1988 [34] D.Lin, P. Zhou,W. Fu, Z. Badics, Z.Cendes, A Dynamic Core Loss Model for Soft Ferromagnetic and Power Ferrite Materials in Transient Finite Element Analysis, IEEE Transactions On Magnetics, Vol. 40.2 S.1318ff., 2004 [35] K. von Dobbeler, Wirkungsweise, Berechnen und Bemessen von Elektromaschinen Band 1: Magnetischer Kreis, Wicklungen, Westermann Verlag, Braunschweig, 1953 [36] W.Schuisky, Berechnung elektrischer Maschinen, Springer Verlag, Wien, 1960

Literaturverzeichnis 172
[37] P.Puranen, Dynamic thermal analysis of an induction servomotor with a coupled elec tromagnetic-thermal model, International Conference On Electrical Mashines 2006 PTA 5.3

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 173
Anhang A1 Geometrie- und Werkstoffdaten des Modellmotors
und des Versuchsaufbaus
Im Folgenden sind die im Berechnungsprogramm genutzten Geometrie- und Werkstoffdaten
des verwendeten Motors sowie weitere relevante Daten für die Temperaturberechnungen
(Kapitel 8) dokumentiert. Näheres zur praktischen Temperaturmessung ist [25] zu entnehmen.
A1.1 Zeichnungen Statorblechpaket
Bild A1.1: Maßangaben des Statorblechpakets

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 174
Bild A1.2: Statorblechpaket mit eingelegten Wicklungen (technische SolidWorks-Zeichnung)

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 175
A1.2 Geometrie- und Werkstoffdaten des Statorblechpakets
Die für die Berechnungen relevanten Geometrie- und Werkstoffdaten des Statorblechpakets
sind im Folgenden in Tabellenform aufgeführt. Soweit nicht anders angegeben, sind alle Wer-
te in SI-Einheiten angegeben. Die Beschreibung der Formelzeichen ist dem Anhang A4 zu
entnehmen. Bezeichnung Zahlenwert in SI-Einheit
Zb 0,0072m
Sb 0,0039m
ZWZb 0 m (keine Zwischenzähne)
Blechd 0,0005m
VNh 0,0012m
RFeK , 0,99
,Fe SK 0,99
Hk : 2:1,5
ZahnJoch
Wk :1: 2,1
ZahnJoch
sl 0,05 m
Zl 0,012m
4r 0,03m
6r 0,06 m
1Z 12
gδ 0,00091m
Feρ 28165 kg
m
σ 0
Hσ 2, 25 Wkg
Wσ 0, 25 Wkg
Tabelle A1.1: Geometrie- und Werkstoffdaten des Statorblechpakets

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 176
Tabelle A1.2: Epsteinprotokoll der Eisenbleche

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 177
Um ein Zurechtfinden im Programm zu erleichtern, werden im Folgenden die relevanten
Programmfenster mit den Eingabewerten aufgeführt:
Bild A1.4: Programmfenster " Blechpaket"

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 178
Bild A1.5: Programmfenster " Statornut"
A1.3 Geometrie- und Werkstoffdaten der Statorwicklung
Die für die Berechnungen relevanten Geometrie- und Werkstoffdaten der Statorwicklung sind
im Folgenden in Tabellenform aufgeführt. Soweit nicht anders angegeben, sind alle Werte in
SI-Einheiten angegeben. Die Beschreibung der Formelzeichen ist dem Anhang A4 zu ent-
nehmen.

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 179
Bezeichnung Zahlenwert in SI-Einheit
DrahtA 7 23,96 10 m−⋅
e 0,007 m
h 10000
1h 0,008m
VNh 0,0012m
AI variabel
CUK 0,4
WAK 1
ZWZK 1
m 3
N 65
1p 4
q 1
0r 0,0045m
AR 1,967Ω (bei 20°C)
γ 1,89
)( DichteCuρ 28920 kg
m
( . .)CU spez Widerstρ 60,017 10 m−⋅ Ω
Tabelle A1.2: Geometrie- und Werkstoffdaten der Statorwicklung
Um ein Zurechtfinden im Programm zu erleichtern, werden im Folgenden die relevanten
Programmfenster mit den Eingabewerten sowie Definitionen einiger Geometriewerte aufge-
führt:

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 180
Bild A1.6: Definition der Geometriegrößen des Wickelkopfes und vereinfachte Darstellung
des magnetischen Feldes am Wickelkopf

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 181
Bild A1.7: Programmfenster "Wicklung im Stator"
Bild A1.8: Programmfenster "Wickelkopf"

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 182
A1.4 Geometrie- und Werkstoffdaten der Permanentmagnete
Die für die Berechnungen relevanten Geometrie- und Werkstoffdaten sind im Folgenden in
Tabellenform aufgeführt. Soweit nicht anders angegeben, sind alle Werte in SI-Einheiten an-
gegeben. Die Beschreibung der Formelzeichen ist dem Anhang A4 zu entnehmen.
Bezeichnung Zahlenwert in SI-Einheit
RB 1,06T
md 0,00309 m
CH 790000 Am
fp 8
2r 0,026m
fb ,α 0,8°
pmα 22,5°
,r magμ 1,32
magρ 28300 kg
m
fp ,τ 22,5°
Tabelle A1.3: Geometrie- und Werkstoffdaten der Permanentmagnete
Um ein Zurechtfinden im Programm zu erleichtern, werden im Folgenden die relevanten
Programmfenster sowie das Datenblatt der Permanentmagnete mit weiteren Daten aufgeführt.
Desweiteren wird das Datenblatt des Klebers aufgeführt, der zum Aufkleben der Magnete auf
den Rotor verwendet wurde:

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 183
Bild A1.9: Programmfenster "Geometrie Permanentmagnete"
Bild A1.10: Programmfenster "Werkstoffdaten Permanentmagnete" Seite 1

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 184
Bild A1.11: Programmfenster "Werkstoffdaten Permanentmagnete" Seite 2

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 185
Bild A1.12: Datenblatt des Werkstoffs der Permanentmagnete

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 186

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 187
Bild A1.13: Datenblatt des Klebers, mit dem die Permanentmagnete befestigt wurden

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 188
A1.5 Geometrie- und Werkstoffdaten des Rotorblechpaketes und der Ro-torwelle
Die für die Berechnungen relevanten Geometrie- und Werkstoffdaten sind im Folgenden in
Tabellenform aufgeführt. Soweit nicht anders angegeben, sind alle Werte in SI-Einheiten an-
gegeben. Die Beschreibung der Formelzeichen ist dem Anhang A4 zu entnehmen.
Tabelle A1.4: Geometrie- und Werkstoffdaten des Rotorblechpaketes und der Rotorwelle
Bezeichnung Zahlenwert in SI-Einheit
RFeK , 0,99
sl 0,05 m
, ,1Welle innenl 0
, ,2Welle innenl 0
, ,1Welle aussenl 0,05 m
, ,2Welle aussenl 0,05 m
1r 0,006m
2r 0,026m

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 189
Bild A1.14: Prinzipieller Aufbau von Rotorblechpaket, PM-Segmenten und Rotorwelle

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 190
A1.6 Vorgabewerte und berechnete Werte der Temperatursimulation
Die vielfältigen Vorgabewerte für einzelne thermische Werkstoffeigenschaften der Teilkörper
und Verlustquellen lassen sich ebenso wie die berechneten Wärmeübergangswiderstände und
Wärmekapazitäten nur schwerlich in Tabellenform darstellen. Sie sind (hier für 2A/30Hz, mit
Rotation) den folgenden Programmfenstern zu entnehmen.
In die Berechnung eingehende Werte der Verlustquellen sind zusätzlich dem Anhang A3 zu
entnehmen.
Bild A1.15: Programmfenster Verlustberechnung/Schaltzeitpunkte

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 191
Bild A1.16: Programmfenste Starttemperaturen der Teilkörper
Bild A1.17: Programmfenster Wärmeübergangswiderstände, Fenster1

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 192
Bild A1.18: Programmfenster Wärmeübergangswiderstände, Fenster2
Bild A1.18: Programmfenster Übergangsschichten bei Wärmeleitung

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 193
Bild A1.19: Programmfenster Strahlungsemissionskoeffizenten
Bild A1.20: Programmfenster Wärmekapazitäten

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 194
Bild A1.21: Programmfenster spezifische Wärmekapazitäten
Bild A1.22: Programmfenster Einstrahlzahlen am Wickelkopf

Geometrie- und Werkstoffdaten des Modellmotors und des Versuchsaufbaus 195
Bild A1.23: Programmfenster Arbeitspunkt
Zusätzlich geht der messtechnisch ermittelte Wärmeübergangskoeffizient für den Wärme-
übergang von den Wicklungen in der Nut auf Statoreisen und Statorzähne in die Berechnung
ein mit
, 2 2 20,108 54,1769d Cu FeW WT
K m Kmα − = ⋅ + .
Näheres zur Bestimmung dieses Wärmeübergangskoeffizienten im Experiment ist [25] zu
entnehmen.

Berechnung des mittleren thermischen Luftspaltes einer PM-Maschine 196
Anhang A2 Berechnung des mittleren thermischen Luftspaltes
einer PM-Maschine
A2.1 Definition des mittleren thermischen Luftspaltes
Der Vergleich von Beispielrechnungen mit verschiedenen Luftspaltweiten zeigt, daß geringe
Änderungen der Luftspaltweite von 0,1 mm bereits zu Änderungen der Temperaturen auf dem
Rotor von mehreren Grad führen können. Die Abschätzung eines mittleren Luftspaltes ist für
Flussverkettungsberechnungen und Berechnung der Induktivitäten ausreichend, da sich für
diese Berechnungen die Magnete wie Luft verhalten und somit den Großteil des effektiven
Luftspaltes ausmachen.
Für thermische Betrachtungen entspricht der effektive Luftspalt dem geometrischen Luftspalt.
Bild A2.1 zeigt die Beschaffenheit des Luftspaltes für die Maschine gemäß A1.
Bild A2.1: Beschaffenheit des Luftspaltes für die Maschine gemäß Anhang A1

Berechnung des mittleren thermischen Luftspaltes einer PM-Maschine 197
Durch die geraden Kanten der Magnetsegmente entsteht ein Luftspalt, dessen Weite über dem
Umfang nicht regelmäßig ist.
Durch die nicht von den Wicklungen ausgefüllten Nutschlitze entsteht außerdem im Bereich
der Nutschlitze ein abweichender Luftspalt. Dieser Einfluss wird in den entsprechenden Un-
terkapiteln des Kapitels 5 gesondert berechnet und wird deshalb hier zur Berechnung des mitt-
leren thermischen Luftspaltes nicht weiter betrachtet.
Desweiteren sind die Lücken zwischen den Magnetsegmenten mit einzubeziehen. Diese sind
in der realen Anordnung teilweise durch Kleber ausgefüllt. Der Berechnung ihres Einflusses
wird daher zusätzlich ein Korrekturfaktor beigefügt.
A2.2. Geometrische Ersatzanordnungen zur Bestimmung des mittleren thermischen Luftspaltes
Die folgenden Grafiken zeigen die geometrische Ersatzanordnung zur Berechnung des mittle-
ren thermischen Luftspaltes ,g mittelδ im Bereich eines Magnetsegmentes.

Berechnung des mittleren thermischen Luftspaltes einer PM-Maschine 198
r4
r2
Magnetsegment dM
δg,max
δg,min
δg,Verschiebung
b∗Magnet
bMagnet
ϕPM
Bild A2.2: Ersatzanordnung zur Berechnung des mittleren geometrischen Luftspaltes vor Ver-
schiebung des Magnetsegments
α
β
δg,Verschiebung
δg,min
a
Bild A2.3: Vergrößerter Ausschnitt der Ersatzanordnung zur Berechnung des mittleren geo-
metrischen Luftspaltes vor Verschiebung des Magnetsegments

Berechnung des mittleren thermischen Luftspaltes einer PM-Maschine 199
r4
r2
Magnetsegment dM
δg,max-δg,Verschiebung
δg,Verschiebung
b∗Magnet
bMagnet
ϕ∗PM
Bild A2.4: Ersatzanordnung zur Berechnung des mittleren geometrischen Luftspaltes nach
Verschiebung des Magnetsegments

Berechnung des mittleren thermischen Luftspaltes einer PM-Maschine 200
PM-SegmentPM-Segment
dm dm
cαdm αdm
γ
Aspalt
Bild A2.5: Ersatzanordnung zur Bestimmung des Luftspaltanteils zwischen den Magnetseg-
menten
A2.3 Berechnung des mittleren geometrischen Luftspaltes
Die Berechnung des mittleren geometrischen Luftspaltes erfolgt unter Zugrundelegung fol-
gender Vorgabewerte, die aufgrund der Konstruktion bekannt sind oder gemessen werden:
,maxgδ ist Ausgangswert der Konstruktion
,mingδ aus Messung am Objekt
md ist Ausgangswert der Konstruktion
PMϕ aus der Anzahl der Magnetsegmente am Umfang
4r ist Ausgangswert der Konstruktion
Mit diesen Vorgabewerten folgt die Berechnung gemäß obiger Ersatzanordnung:

Berechnung des mittleren thermischen Luftspaltes einer PM-Maschine 201
A2.3.1 Berechnung des Ersatzwinkels *PMϕ
Die Berechnung des mittleren thermischen Luftspaltes erschließt sich über die Berechnung
der Fläche über dem Magnetsegment gemäß Bild A2.1.
Diese Fläche teilt sich auf in eine Trapezfläche und ein Kreissegment.
Zuerst ist ,g Verschiebungδ zu berechnen als der Wert, um den das Magnetsegment in der Ersatz-
anordnung nach oben verschoben werden muss, damit als Fläche nur noch das Kreissegment
übrigbleibt. Da die Berechnung von ,g Verschiebungδ aber wiederum vom Winkel *PMϕ abhängt,
wird hier zunächst die Näherung
, ,ming Verschiebung gδ δ= (A2.1)
gemacht.
Diese Näherung ist später anhand des berechneten Wertes für ,g Verschiebungδ zu verifizieren.
Aus der Geometrie am Kreissegment folgt *
2,max , 42 sin
2PM
g g Verschiebung r ϕδ δ⎛ ⎞
− = ⋅ ⋅ ⎜ ⎟⎝ ⎠
=>
,max ,*
4
4 arcsin2
g g VerschiebungPM r
δ δϕ
⎛ ⎞−= ⋅ ⎜ ⎟⎜ ⎟⋅⎝ ⎠
. (A2.2)

Berechnung des mittleren thermischen Luftspaltes einer PM-Maschine 202
A2.3.2 Berechnung der Fläche des Kreissegments
Für die Berechnung der Fläche des Kreissegments folgt
( )2 * *4
1 sin2Kreissegment PM PMA r ϕ ϕ⎡ ⎤= ⋅ ⋅ −⎣ ⎦ (A2.3)
A2.3.3 Berechnung der Ersatzmagnetbreite *Magnetb
Aus der Geometrie am Kreissegment folgt
( )*
*4 ,2 sin
2PM
Magnet g Verschiebungb r ϕδ⎛ ⎞
= ⋅ − ⋅ ⎜ ⎟⎝ ⎠
. (A2.4)
A2.3.4 Berechnung der Winkel α und β
*
2PMϕα = (A2.5)
2πβ α= − (A2.6)
A2.3.5 Berechnung von ,g Verschiebungδ
( )( )
2
, ,min 2
sin1
sing Verschiebung g
αδ δ
β= ⋅ + (A2.7)
Diese Formel ist abgeleitet aus den Grundgleichungen des Kreissegments. Auf die Herleitung
wird hier verzichtet.

Berechnung des mittleren thermischen Luftspaltes einer PM-Maschine 203
A2.3.6 Berechnung der linearisierten Kreisbogenlänge a
2 2, ,ming Verschiebung ga δ δ= − . (A2.8)
Aufgrund des im Regelfall großen Biegeradius im Vergleich zu a ist die Linearisierung des
Kreisbogens zulässig.
A2.3.7 Berechnung der Fläche des Trapezes
*
, ,minTrapez Magnet g Verschiebung gA b aδ δ= ⋅ + ⋅ (A2.9)
A2.3.8 Berechnung der Fläche des Dreieckspaltes zwischen den Magnetsegmen-ten
Gemäß Bild A2.5 folgt
( )( )
sinsinm
dm
c dγ
α= ⋅ (A2.10)
mit
122 fp
γ π= ⋅⋅
, (A2.11)
2dmπ γα −
= . (A2.12)
Es folgt
2 21 44Spalt m SpaltA c d c K= ⋅ ⋅ ⋅ − ⋅ (A2.13)
SpaltK ist der Korrekturfaktor, der mögliche Kleberrückstände im Spalt zwischen den PM-
Segmenten berücksichtigt.

Berechnung des mittleren thermischen Luftspaltes einer PM-Maschine 204
A2.3.9 Berechnung der Gesamtfläche
gesamt Kreissegment Trapez SpaltA A A A= + + (A2.14)
A2.3.10 Berechnung des mittleren geometrischen Luftspaltes ,g mittelδ
, *
1g mittel gesamt
Magnet
Ab
δ = ⋅ (A2.15)
A2.4 Berechnung des mittleren geometrischen Luftspaltes für die Ma- schine gemäß Anhang A1
Vorgabewerte:
,max 1, 00g mmδ =
,min 0,59g mmδ =
3md mm=
2 0,026r m=
4 0,03r m=
22,5 0,3927PM radϕ = ° =
Aus der Berechnung gemäß 3) folgt * 0,01193Magnetb m=
* 19,105 0,333345PM radϕ = ° =
6 22,7653 10KreissegmentA m−= ⋅
11, 25 0,19635radα = ° =
78,75 1,37445radβ = ° = 4
, 6,0156 10g Verschiebung mδ −= ⋅

Berechnung des mittleren thermischen Luftspaltes einer PM-Maschine 205
41,17 10a m−= ⋅ 6 27, 247 10TrapezA m−= ⋅
6 21,722 10Spalt SpaltA m K−= ⋅ ⋅
0SpaltK =
5 21,0013 10gesamtA m−= ⋅
=>
, 0,839g mittel mmδ = für 0SpaltK =
, 0,983g mittel mmδ = für 1SpaltK =
, 0,911g mittel mmδ = für 0,5SpaltK =
Die Magnetdicke ist so angepasst, dass sich die gewünschte Luftspaltweite im Berechnungs-
modell ergibt. Dies ist dadurch legitimiert, daß eine geringfügig abgeänderte Magnetdicke
keinen Einfluss auf das thermische Verhalten hat, sehrwohl aber eine geringfügig abgeänderte
Luftspaltweite.
Den Beispielrechnungen des Kapitels 8 liegt ein Luftspaltwert von 0,911 mm zugrunde. Dies
bedeutet, daß der Einfluss der Spalte zwischen den Magneten zur Hälfte berücksichtigt wird.
Dies entspricht der Realität, da die Spalte zum Teil durch Kleber gefüllt sind.

Messtechnische Bestimmung von Verlusten 206
Anhang A3 Messtechnische Bestimmung von Verlusten
Die folgende messtechnische Untersuchung der in der Maschine gemäß A1 auftretenden Rei-
bungsverluste und Eisenverluste soll zeigen, wie diese für die Simulation der Temperaturver-
läufe berücksichtigt werden müssen. Ausserdem erlaubt die Quantifizierung der Reibungsver-
luste eine Separation dieser von den in der Maschine auftretenden Eisenverlusten und somit
eine Βewertung der Genauigkeit der Berechnung der Eisenverluste gemäß Kapitel 7.
A3.1 Versuchsanordnung
Die folgende Grafik zeigt den Aufbau zur Messung des Reibmomentes der Wälzlager. Die
Welle wird über eine Drehmomentenmesswelle (2 Nm) mit einer Asynchronmaschine gekop-
pelt, die die Welle mit der erforderlichen Drehzahl antreibt. Genutzt wird die Welle der Ma-
schine gemäß A1 mit bereits eingelaufenen Lagern.
Die Welle ist in jedem der zwei Lagerböcke mit zwei Wälzlagern vom Typ 61903 ZZ (
17 , 30 , 7d mm D mm b mm= = = ) gelagert. Dies entspricht der Versuchsanordnung gemäß A1.
Bild A3.1a: Versuchsanordnung zur Bestimmung von Reibmomenten (hier nur Wälzlager)

Messtechnische Bestimmung von Verlusten 207
Bild A3.1b: Versuchsanordnung zur Bestimmung von Reibverlusten und Eisenverlusten (hier
Wälzlager, Luftreibung und ggf. Eisenverluste des Erregerfeldes)
Bild A3.2: Abmessungen des Wälzlagers 61903 ZZ
17 , 30 , 7d mm D mm B mm= = =

Messtechnische Bestimmung von Verlusten 208
Bild A3.3: Wälzlager 61903 ZZ
Die Erfassung des Reibmomentes über der Drehzahl wurde in einer zweiten Messung um den
Einfluss der angekoppelten Quecksilberspannungsübertragung erweitert, die ein zusätzliches
Reibmoment in die Anordnung bringt. In einer dritten Messung wurde der Einfluss der Luft-
reibung im Luftspalt untersucht, indem die Versuchsanordnung um das Statorblechpaket mit
eingelegten Wicklungen erweitert wurde (Bild A3.1b) und ein Rotor mit entmagnetisierten
PM-Segmenten verwendet wurde. In einer vierten Messung wurde der Originalrotor mit mag-
netisierten PM-Segmenten verwendet. Diese Messung erlaubt Rückschlüsse auf die vom Er-
regerfeld erzeugten Eisenverluste.

Messtechnische Bestimmung von Verlusten 209
A3.2 Messtechnische Bestimmung von Reibverlusten und Eisenverlusten
Um die Verlustquellen voneinander separieren zu können, werden vier Messungen durchge-
führt. Die folgende Tabelle beschreibt den jeweiligen Messaufbau und die gemessenen Ver-
lustquellen. Im Anschluss ist durch Differenzbildung eine Separation der Verlustquellen mög-
lich. In den nächsten Unterkapiteln werden die Messergebnisse dargestellt und Ausgleichs-
funktionen abgeleitet.
Messung Komponenten Verluste Ausgleichs-
funktion
1 Welle PLager 1
2 Welle + Rotor (magnetisiert) + PB PLager + PPB 2
3 Welle + Rotor (nicht magnetisiert)
+ PB + Stator PLager + PPB + PLuft 3
4 Welle + Rotor (magnetisiert) + PB
+ Stator PLager + PPB + PLuft + PEisen 4
Tabelle A3.1: Messungen zur Separation der Verlustquellen in der Maschine

Messtechnische Bestimmung von Verlusten 210
A 3.2.1 Reibverluste durch Wälzlager und Quecksilberspannungsübertragung
Die Messung des Reibmomentes über der Drehzahl für die Anordnung gemäß Bild A3.1a
führt auf folgende Verläufe:
Bild A3.4: Reibmomente über der Drehzahl für die Versuchsanordnung gemäß Bild A3.1a
Für die Ausgleichsfunktionen wurde ein doppelter Exponentialansatz gewählt gemäß b x d xy a e c e⋅ ⋅= ⋅ + ⋅ .
Ausgleichsfunktion 1:
5
0,056066,363 10
0,056730,002872
abcd
−
=
= ⋅= −= −

Messtechnische Bestimmung von Verlusten 211
Ausgleichsfunktion 2:
4
0,068521,126 10
0,068060,002875
abcd
−
=
= ⋅= −= −
Dies führt auf folgende Reibverlustleistungen abhängig von der Drehzahl (berechnet mit den
Ausgleichsfunktionen 1 und 2):
Bild A3.6: Reibverluste über der Drehzahl
Für die in Kapitel 8 betrachteten Frequenzen ergeben sich somit folgende Reibverluste (Lager
+ Quecksilberspannungsübertragung):
30 Hz 225 U/min 0,82 W
80 Hz 600 U/min 3,85 W
Die Temperaturabhängigkeit der Lagerreibung wird hier vernachlässigt. Die folgenden Grafi-
ken zeigen informativ die Temperaturen der Lager bei unterschiedlichen Drehzahlen:

Messtechnische Bestimmung von Verlusten 212
Sp1
23.6
44.9 °C
30
40
Meßpunkt: 42.6 °C Drehzahl: 4000 U/min
Sp1
23.3
44.9 °C
30
40
Sp1
23.4
44.8 °C
30
40
Meßpunkt: 35.4 °C Meßpunkt: 34.1 °C Drehzahl: 3000 U/min Drehzahl: 2000 U/min
Sp1
23.2
44.8 °C
30
40
Sp1
23.4
44.8 °C
30
40
Meßpunkt: 29.3 °C Meßpunkt: 26.6 °C Drehzahl: 1000 U/min Drehzahl: 450 U/min

Messtechnische Bestimmung von Verlusten 213
A 3.2.2 Reibverluste durch Wälzlager, Quecksilberspannungsübertragung und Luftreibung im Luftspalt
Die Messung des Reibmoments über der Drehzahl für die Anordnung gemäß Bild A3.1b mit
entmagnetisierten Magnetsegmenten führt auf folgende Verläufe:
Bild A3.4: Reibmoment über der Drehzahl für die Versuchsanordnung gemäß Bild A3.1b oh-
ne Permanentmagneterregung
Für die Ausgleichsfunktionen wurde ein doppelter Exponentialansatz gewählt gemäß b x d xy a e c e⋅ ⋅= ⋅ + ⋅ .
Ausgleichsfunktion 3 :
5
0,11294,001 10
0,10860,001674
abcd
−
=
= ⋅= −= −
Dies führt auf folgende Reibverlustleistungen abhängig von der Drehzahl (berechnet mit der
Ausgleichsfunktion 3):

Messtechnische Bestimmung von Verlusten 214
Bild A3.6: Reibverluste über der Drehzahl
Für die betrachteten Frequenzen ergeben sich somit folgende Reibverluste (Lager + Quecksil-
berspannungsübertragung + Luftreibung im Luftspalt):
30 Hz 225 U/min 0,93 W
80 Hz 600 U/min 4,78 W
A 3.2.3 Reibverluste durch Wälzlager, Quecksilberspannungsübertragung, Luftrei-bung im Luftspalt und Eisenverluste im Statorblech durch das Erregerfeld
Die Messung des Reibmoments über der Drehzahl für die Anordnung gemäß Bild A3.1b mit
magnetisierten Magnetsegmenten führt auf folgenden Verlauf. Der Einfluss der Rastmomente
führt in unteren Drehzahlbereichen dazu, daß der Motor so stark abgebremst wird, daß Haft-
reibung in den Lagern auftritt. Eine sinnvolle Bestimmung der Verlustleistungen im Motor ist
deshalb erst ab einer Drehzahl von 100 U/min möglich.

Messtechnische Bestimmung von Verlusten 215
200 400 600 800 1000 1200 1400 1600 1800 2000
0.05
0.1
0.15
0.2
0.25
0.3
Drehzahl in U/min
Rei
bmom
ent i
n N
m
Ausgleichsfunktion 4
Bild A3.4: Reibmoment über der Drehzahl für die Versuchsanordnung gemäß Bild A5.1b mit
Erregung ohne Kupferwicklungen
Für die Ausgleichsfunktionen wurde ein doppelter Exponentialansatz gewählt gemäß b x d xy a e c e⋅ ⋅= ⋅ + ⋅ .
Ausgleichsfunktion 4 :
5
0, 25011,135 100,19870,001131
abcd
−
=
= − ⋅= −= −
Dies führt auf folgende Reibverlustleistungen abhängig von der Drehzahl (berechnet mit der
Ausgleichsfunktion 4):

Messtechnische Bestimmung von Verlusten 216
0 200 400 600 800 1000 1200 1400 1600 1800 2000 22000
5
10
15
20
25
30
35
40
45
50
Drehzahl in U/min
Verlu
stle
istu
ng in
Wat
t
Verlustleistung (Lager + Quecksilberspannungsübertragung + Luftreibung im Luftspalt+ Eisenverluste im Stator durch das Erregerfeld
Bild A3.6: Reib- und Eisenverluste über der Drehzahl
Für die betrachteten Frequenzen ergeben sich somit folgende Reibverluste (Lager + Quecksil-
berspannungsübertragung + Luftreibung im Luftspalt + Eisenverluste durch das Erregerfeld
im Statoreisen):
30 Hz 225 U/min 2,25 W
80 Hz 600 U/min 9,27 W
A 3.3 Separation der Einzelverlustquellen
Die Messungen gemäß Kapitel A3.2 lassen eine Separation der einzelnen Verlustquellen zu.
Die folgende Grafik zeigt die Einzelverluste über der Drehzahl, berechnet über die Aus-
gleichsfunktionen 1-4:

Messtechnische Bestimmung von Verlusten 217
0 200 400 600 800 1000 1200 1400 1600 1800 2000 22000
5
10
15
20
25
Drehzahl in U/min
Ver
lust
leis
tung
in W
att
Verlustleistung vier WälzlagerVerlustleistung QuecksilberspannungsübertragungVerlustleistung Luftreibung im LuftspaltVerlustleistung Eisenverluste
Bild A3.7: Reibverluste und Eisenverluste separiert nach Verlustquellen
Die folgende Grafik zeigt die Einzelverluste im Bereich der beiden betrachteten Arbeitspunk-
te der Maschine:
0 100 200 300 400 500 6000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Drehzahl in U/min
Verlu
stle
istu
ng in
Wat
t
Verlustleistung vier WälzlagerVerlustleistung QuecksilberspannungsübertragungVerlustleistung Luftreibung im LuftspaltVerlustleistung Eisenverluste
Bild A3.8: Reibverluste und Eisenverluste separiert nach Verlustquellen

Messtechnische Bestimmung von Verlusten 218
Die folgende Tabelle zeigt die Auswertung der Leerlaufmessungen in zwei Arbeitspunkten:
Verlustkomponente 225 U/min (30Hz) 600 U/min (80Hz)
Reibverluste vier Wälzlager 0,64 W 3,02 W
Reibverluste Quecksilberspan-
nungsübertragung 0,18 W 0,83 W
Luftreibung im Luftspalt 0,11 W 0,93 W
Eisenverluste (durch Erregerfeld
erzeugt) 1,32 W 4,49 W
Summe 2,25 W 9,27 W
Tabelle A3.2: Werte der Verlustkomponenten im Arbeitspunkt
Die folgende Tabelle zeigt die während der Temperaturmessungen am Modellmotor ohne
Rotation und mit Rotation auftretenden Verluste (für 3A). Aufgrund der Stromregelung sind
die Effektivwerte der Strangströme während der Messung konstant. Dies erlaubt einen Ver-
gleich der Verluste bei Betrieb ohne Rotation (hier treten ja nur Stromwärmeverluste auf) mit
den Verlusten bei Betrieb mit Rotation (hier treten alle zuvor aufgeführten Verlustquellen
auf). Die Differenzbildung erlaubt die Bestimmung der Summe der Verluste, die bei Rotation
neben den Stromwärmeverlusten auftreten. Diese Berechnung soll an dieser Stelle aber nur
zur Kontrolle der zuvor aufgeführten genauen Separation der Verlustquellen dienen. In die
Beispielrechnungen gemäß Kapitel 8 gehen die in Tabelle A3.2 aufgeführten Eisenverluste
ein.

Messtechnische Bestimmung von Verlusten 219
Meßwertnummer (0 Hz) 7 28 46 88 157 244 347 474 641 884 1301 3585
Kupfertemperatur (0 Hz) in °C 40 50 60 70 80 90 100 110 120 130 140 148,7Leistung gesamt (0 Hz) 53,04 56,29 57,99 60,14 62,35 64,55 66,55 66,99 70,53 72,59 74,61 76,45
Meßwertnummer (30 Hz) 22 41 71 124 189 282 374 486 652 859 1159 1830
Kupfertemperatur (30 Hz) in °C 40 50 60 70 80 90 100 110 120 130 140 148,7Wirkleistung Strang 1 (30 Hz) 20,02 20,68 21,32 21,93 22,58 23,23 23,81 24,46 25,19 25,80 26,34 26,93Wirkleistung Strang 2 (30 Hz) 18,57 19,27 19,94 20,55 21,21 21,91 22,54 23,13 23,88 24,58 25,12 25,69Wirkleistung Strang 3 (30 Hz) 18,76 19,53 20,22 20,83 21,53 22,56 22,84 23,49 24,23 24,90 25,38 25,99Wirkleistung gesamt (30 Hz) 57,35 59,48 61,48 63,31 65,32 67,7 69,19 71,08 73,30 75,28 76,84 78,61
Reibverluste Lager + Quecksilberspan-nungsübertragung + Luftreibung (gemäß
Tabelle A3.2) 0,93 0,93 0,93 0,93 0,93 0,93 0,93 0,93 0,93 0,93 0,93 0,93
Eisenverluste (30 Hz) 3,38 2,26 2,56 2,24 2,04 2,22 1,71 3,16 1,84 1,76 1,30 1,23
Meßwertnummer (80 Hz) 11 28 57 106 175 254 347 460 593 779 1088 1591
Kupfertemperatur (80 Hz) in °C 40 50 60 70 80 90 100 110 120 130 140 148,7Wirkleistung Strang 1 (80 Hz) 23,18 24,25 24,86 25,43 26,07 26,62 27,17 27,89 28,30 28,82 29,72 30,14Wirkleistung Strang 2 (80 Hz) 19,36 21,93 21,80 22,33 22,97 23,49 24,16 24,87 25,29 25,99 26,78 27,28Wirkleistung Strang 3 (80 Hz) 20,29 21,80 22,45 23,14 23,64 24,25 24,89 25,54 26,00 26,58 27,51 27,98Wirkleistung gesamt (80 Hz) 62,83 67,98 69,11 70,90 72,68 74,36 76,22 78,30 79,59 81,39 84,01 85,40
Reibverluste Lager + Quecksilberspan-nungsübertragung + Luftreibung (gemäß
Tabelle A3.2) 4,78 4,78 4,78 4,78 4,78 4,78 4,78 4,78 4,78 4,78 4,78 4,78
Eisenverluste (80 Hz) 5,01 6,91 6,34 5,98 5,55 5,03 4,89 6,53 4,28 4,02 4,62 4,16
Tabelle A3.3: Verlustleistungen in der Maschine verglichen für Messung mit Rotatio und ohne Rotation, sowie Quantisierung der Eisenverluste
über eine Leistungsbilanz, wobei die Reibungsverluste gemäß Tabelle A3.2 eingehen.

Messtechnische Bestimmung von Verlusten 220
Der Vergleich zeigt, daß die aus der Leistungsbilanz berechneten Eisenverluste nah an den
Werten liegen, die durch meßtechnische Separation der Verlustquellen bestimmt wurden.
A3.4 Berechnung der Eisenverluste für die Versuchsmaschine
Die Berechnung der Eisenverluste wird gemäß Kapitel 7.3.4 durchgeführt, da die dort aufge-
führte Formel die höchste Flexibilität aufweist. Die Berechnung der Verluste wird getrennt für
Stator und Rotor durchgeführt.
21 ˆ
50 50 1,5
xxFe Fe Fe
Fe H H W W Fef f BP k k mHz Hz T
σ σ⎡ ⎤ ⎛ ⎞⎛ ⎞= ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅⎢ ⎥ ⎜ ⎟⎜ ⎟
⎝ ⎠⎢ ⎥ ⎝ ⎠⎣ ⎦. (7.41)
Die Auswertung des Epsteinprotokolls (Bild A3.8) führt für den Exponenten 2x auf
2 2,137x = .
Desweiteren wird
1 2x =
angenommen.
Die Herstellerangabe beinhaltet nur die Angabe der spezifischen Gesamtverluste mit
2,575GWkg
σ = bei 1,5 T.
Die Aufteilung in spezifische Verluste für Hysterese und Wirbelströme gelingt durch Zerle-
gung des Verlaufs der Eisenverluste über der Maschinendrehzahl (Bild A3.8) in einen fre-
quenzproportionalen Anteil und einen Anteil, der quadratisch von der Frequenz abhängig ist.

Messtechnische Bestimmung von Verlusten 221
Es folgt
89,68% 2,31H GWkg
σ σ= ⋅ =
10,32% 0, 27W GWkg
σ σ= ⋅ = .
Die für Zähne und Joche unterschiedlichen Korrekturfaktoren werden für diese Aufteilung
näherungsweise vernachlässigt. Die gewonnenen Werte entsprechen der allgemein üblichen
Aufteilung der Verlustarten.
Die Berechnung mit Korrekturfaktoren gemäß Kapitel 7.3.1 führt auf folgende Eisenverluste
in Zahn und Joch:
Verlustkomponente 225 U/min (30Hz) 600 U/min (80Hz)
FeP Statorzähne (berechnet) 0,316 W 0,89 W
FeP Statorjoch (berechnet) 0,037 W 0,15 W
FeP Stator gesamt (berechnet) 0,353 W 1,04 W
FeP aus Separation der Verlust-
quellen gemäß A3.3 1,32 4,49
Tabelle A3.4: berechnete Eisenverluste für die betrachteten Arbeitspunkte
Der Vergleich zeigt, daß die Berechnung noch um den Faktor 3-4 unterhalb der gemessenen
Werte liegt. Dies kann unterschiedliche Ursachen haben:
1. Nichtberücksichtigung von Randeffekten durch Grate an den Eisenblechen
2. schlechte Isolierung der Eisenbleche gegeneinander
3. falsche Korrekturfaktoren
4. zweifelhafte Gültigkeit der Formeln für sehr geringe Flussdichten
5. Klammerung der Bleche der Versuchsmaschine

Messtechnische Bestimmung von Verlusten 222
Für die Berechnung der Temperaturverläufe im Kapitel 8 wird deshalb auf die aus der Separa-
tion der Verlustquellen gewonnenen Werte zurückgegriffen. Nur dies erlaubt einen Vergleich
von gemessenen und berechneten Temperaturverläufen.
Die Berechnung der Eisenverluste ohne Verwendung von Messwerten mit den in Kapitel 7
vorgestellten Berechnungsverfahren bedarf weitergehender Studien, die nicht mehr Teil dieser
Arbeit sind.

Verwendete Formelzeichen 223
Anhang A4 Verwendete Formelzeichen
Die folgende Tabelle enthält alle in dieser Arbeit verwendeten Formelzeichen, soweit sie
nicht ausschließlich unmittelbar an der Stelle ihrer Einführung verwendet werden. Die in der
Tabelle aufgeführten physikalischen Größen werden sowohl in dieser Arbeit als auch im
Programm, soweit nicht anders aufgeführt, in SI-Grundeinheiten verwendet. Zu beachten ist
die teilweise sehr unterschiedliche Schreibweise zwischen Dokumentation und Programm.
Diese begründet sich durch den begrenzten Zeichensatz, der in Matlab zur Bezeichnung von
Variablen zur Verfügung steht.
Bezeichnung
Dokumentation Bezeichnung
in Matlab Beschreibung
a a Anzahl der parallelen Zweige eines Stranges
NcuA , / CuA A_cu gesamte Kupferfläche einer Spule
DrahtA A_Draht Querschnitt des verwendeten Kupferdrahtes
WFA A_wf geometrische Fläche des Wickelfensters
fb b_f Polübergangsbreite der Magnetsegmente in m
FeB B_fe Maximalwert der magnetischen Flussdichte im betrachteten
Eisenabschnitt
RjB , B_jr maximal zulässige magnetische Flussdichte im Rotorjoch
SjB , B_js maximal zulässige magnetische Flussdichte im Statorjoch
isoNb , b_Niso Dicke der gleichmäßigen Nutisolation
RB B_r Remanenzinduktion des Magnetmaterials
Sb bs Nutschlitzbreite
BV BV Verhältnis der Flussdichte im Luftspalt zur Remanenzinduk-
tion
ZB B_z maximal zulässige magnetische Flussdichte im Nutzahn
Zb b_z Nutzahnbreite des bewickelten Zahns
ZWZb b_z Nutzahnbreite des Zwischenzahns
,K TKC C_K Wärmekapazität des Teilkörpers
SC C_S Strahlungszahl des idealen Schwarzkörpers
pc c_p spezifische Wärmekapazität

Verwendete Formelzeichen 224
Blechd d_blech Blechdicke im Blechpaket (für Stator und Rotor gleich ange-
nommen)
hd d_h Hydraulischer Durchmesser
md d_m radiale Magnetdicke
e e Abstand der Stirnverbindungsmittellinie von einem Zylinder
in Luftspaltmitte
1f f1 Zusammenfassung eines mathematischen Ausdrucks
elektrischf f_elektrisch Frequenz der Netzspannung
Fef f_Fe Frequenz der magnetischen Flussdichte zur Berechnung von
Eisenverlusten
thI max, I_max_thermisch thermischer Grenzstrom
magI max, I_max_magnetisch Entmagnetisierungsstrom
GWFM GWFM Grundwellenfaktor der Fourierreihenentwicklung der Magne-
tisierung der Magnetanordnung
h h Maß für die Verdrehung der Magnetsegmente am Umfang
1h h1 Abstand der Stirnverbindungsmittellinie zum Blechpaket
CH H_c Koerzitivfeldstärke des Magnetmaterials
RJh , h_jr Rotorjochhöhe
SJh , h_js Statorjochhöhe
VNh h_vn Höhe der Vornut
AI Ia Effektivwert des Strangstromes
j j 1−
NJ J_n erforderliche Bemessungsstromdichte zum Erreichen eines
vorgegebenen Luftspaltmomentes
RotorJ J_Rotor Massenträgheitsmoment des Rotors
CK K_c Karterfaktor
CUK K_cu Kupferfüllfaktor (Nutisolation mit eingerechnet)
RFeK , K_fe_r Eisenfüllfaktor des Rotorblechpaketes
,Fe SK K_fe_r Eisenfüllfaktor des Statorblechpakets
lK K_l Korrekturfaktor für die eindimensionale Induktivitätsberech-
nung
Nkν k_n_v Nutschlitzbreitenfaktor der ν -ten Oberwelle
Skν k_s_v Sehnungsfaktor der ν -ten Oberwelle

Verwendete Formelzeichen 225
Wkν k_w_v Wicklungsfaktor der ν -ten Oberwelle
Zkν k_z_v Zonungsfaktor der ν -ten Oberwelle
Hk k_h Korrekturfaktor Hystereseverluste
Wk k_w Korrekturfaktor Wirbelstromverluste
Gk k_g Korrekturfaktor Gesamteisenverluste
WAK K_wa Index für die Unterscheidung von Einschichtwicklung
( )1=WAK und Zweischichtwicklung ( )2=WAK
ZWZK K_wa
Index für die Unterscheidung von konzentrierten Wicklungen
mit Zwischenzähnen ( )2ZWZK = und konzentrierten Wick-
lungen ohne Zwischenzähne ( )1ZWZK =
aL la Stranginduktivität
sl l_s Statorblechpaketlänge
Stl l_st Stirnkopflänge
Zl l_z Zahnlänge = Nuthöhe einschließlich Vornut
, ,1Welle innenl l_welle_innen_1 Länge des freien Wellenabschnittes im Gehäuse auf „Rück-
seite“ des Motors
, ,2Welle innenl l_welle_innen_2 Länge des freien Wellenabschnittes im Gehäuse auf Seite der
Kupplung
, ,1Welle aussenl WU1 Länge des freien Wellenabschnittes außerhalb des Gehäuses
auf „Rückseite“ des Motors
, ,2Welle innenl WU2 Länge des freien Wellenabschnittes außerhalb des Gehäuses
auf der Seite der Kupplung
,1überl l_ü1
Länge des Wellenabschnitts auf der Kupplungsseite,der über
das Blechpaket hinausragt (innerhalb und ausserhalb des
Gehäuses)
,2überl l_ü1
Länge des Wellenabschnitts auf der Motorrückseite,der über
das Blechpaket hinausragt (innerhalb und ausserhalb des
Gehäuses)
M M Magnetisierung des Magnetmaterials
NM M_n Luftspaltmoment im stationären Arbeitspunkt
m m Strangzahl
Cum m_cu Gewicht des Kupfermaterials der Windungen
RFem , m_fe_r Gewicht des Rotoreisenkerns
SFem , m_fe_s Gewicht des Statoreisenkerns (mit Zähnen)

Verwendete Formelzeichen 226
,Fe Zm m_fe_z Gewicht der Statorzähne
gesamtm m_gesamt Gesamtgewicht der Maschine (ohne Welle und Anbauteile)
Magnetm m_m Gewicht des Magnetmaterials
Zm m_z Gewicht eines Nutzahns (mit Vornut)
nM M_n zu erreichendes Luftspaltmoment im Arbeitspunkt
N N Anzahl der Windungen einer Spule
nn n mechanische Drehzahl im Arbeitspunkt
Nu Nu Nußeltzahl zur Berechnung des Wärmeübergangswiderstands
durch Konvektion
ThermischO O_thermisch
thermisch wirksame Oberfläche zur Berechnung von Wär-
meübergangswiderständen, meist mit Index zur Bezeichnung
des zugehörigen Wärmeübergangswiderstand
1p p1 Polpaarzahl der Statorwicklung
fp p_f Polpaarzahl der PM-Anordnung auf dem Rotor
,V TKP P_v_TK Verlustleistung erzeugt durch Verlustquellen im Teilkörper
TK
, , ,( 1)axial TK n nP ν ± → axialer Leistungsfluss im Teilkörper TK im Berechnungs-
intervall ν zwischen benachbarten axialen Teilscheiben
q q Lochzahl
q& Wärmestrom
0r r0 fiktiver Radius der Stirnverbindungen einer Spule
1r r1 Bohrungsradius für die Rotorwelle
2r r2 Rotorblechaußenradius
4r r4 Statorinnenradius
5r r5 Nutaußenradius
6r r6 Statoraussenradius
AR ra Strangwiderstand
s s Breite der Streuschlitzöffnung der Statornut
S Scheiben Anzahl der axialen Teilscheiben der Maschine bei Einbezie-
hung axialer Leistungsflüsse
strombelag strombelag
erforderlicher Strombelag zum Erreichen des vorgegebenen
Luftspaltmomentes (eigentlich a, aber a ist ja schon verge-
ben)
gesamtt t_gesamt Gesamtzeit, für die die Berechnung der Temperaturverläufe
durchgeführt wird

Verwendete Formelzeichen 227
aU Ua Effektivwert der sinusförmigen Ankerspannung im Arbeits-
punkt
pU U_p Effektivwert der Grundwelle der Polradspannung
RFeV , V_fe_r Volumen des Rotoreisenkerns
SFeV , V_fe_s Volumen des Statoreisenkerns (mit Nutzähnen)
ZV V_z Volumen eines Nutzahnes (mit Vornut)
w w Serienwindungszahl
KW W_k Wärmeübergangswiderstand
1WÜ WU1 Überhang der Welle außerhalb des Gehäuses an der Kupp-
lungsseite
2WÜ WU2 Überhang der Welle außerhalb des Gehäuses an der Rücksei-
te
fy y_f effektive Polbreite eines Magnetsegmentes in m
1Z Z1 Nutanzahl im Stator
fb ,α alpha_bf Polübergangsbreite in Grad
pmα alpha_pm Magnetsegmentwinkel
Kα WUEK_K Wärmeübergangskoeffizient für Wärmeübergang durch Kon-
vektion
Lα WUEK_L Wärmeübergangskoeffizient für Wärmeübergang durch
Wärmeleitung
Sα WUEK_S Wärmeübergangskoeffizient für Wärmeübergang durch
Wärmestrahlung
,temp Cuα alpha_temp_cu Temperaturkoeffizient des elektrischen Widerstandes
fy ,α alpha_yf effektive Polbreite in Grad
γ gamma Korrekturfaktor zur Berücksichtigung der Wickeltechnik bei
der Berechnung der Stirnkopflänge
gδ delta_g geometrische Luftspaltweite in radialer Richtung
tΔ delta_t
Berechnungsintervall in der Temperaturberechnung, inner-
halb dessen die Netzwerkelemente als zeitlich nicht veränder-
lich angenommen werden
ϑΔ Temperaturunterschied
ε epsilon Schrittverkürzung der Wicklung in Nutteilungen
TKε eps Emissionsverhältnis der Oberfläche des Teilkörpers
TKϑ Übertemperatur des Teilkörpers TK
λ lambda Induktivität bezogen auf das Quadrat der Serienwindungszahl

Verwendete Formelzeichen 228
TKλ lambda Wärmeleitfähigkeit des Teilkörpers
μ my Oberwellenzahl
0μ my_0 magnetische Feldkonstante
magr ,μ my_mag relative magnetische Permeabilität des Magnetmaterials
Rr ,μ my_rr relative magnetische Permeabilität im Rotoreisen
Sr ,μ my_rs relative magnetische Permeabilität im Statoreisen
ν etha Oberwellenzahl
π pi Kreiszahl
)( DichteCuρ rho_cu spezifische Dichte des Kupfermaterials
Feρ rho_fe spezifische Dichte des Eisenmaterials (ohne Eisenfüllfaktor)
Magnetρ rho_magnet spezifische Dichte des Magnetmaterials
CUρ ro_cu spezifischer Widerstand des Kupfermaterials
σ streuziffer Streuung des Flusses beim Übergang über den Luftspalt
Hσ sigma_h spezifische Verluste im Arbeitspunkt 50Hz/1,5T für die Hys-
terese
Wσ sigma_w spezifische Verluste im Arbeitspunkt 50Hz/1,5T für die Wir-
belströme
Gσ sigma_g spezifische Gesamtverluste im Arbeitspunkt 50Hz/1,5T
pτ tau_p Polteilung am Stator in Meter
Feχ kappa_elektrisch elektrische Leitfähigkeit des Eisenwerkstoffs
Nτ tau_n Nutteilung am Stator
fp ,τ tau_pf Polteilung der Permanentmagnetsegmente in Grad
upϕ phi_up Polradwinkel
iϕ phi_i Stromwinkel
1, 2TK TKϕ phi_12 Einstrahlzahl vom Teilkörper 1 auf den Teilkörper 2
Zϕ phi_z Winkel einer Zahnteilung der Statornutung
1ϕ phi_z ortsfester Statorwinkel
fψ psi_f Grundfeldflussverkettung eines Stranges
ω omega_elektrisch elektrische Kreisfrequenz
ω& Wärmestromdichte
Ω omega_mech mechanische Kreisfrequenz

Lebenslauf Name: Burghard Kipp Geboren: 07.09.1978 in Soest Eltern: Friedrich-Wilhelm Kipp Margarete Elisabeth Kipp, geb. Lüsse Familienstand: ledig Schulbildung: 1985 – 1989 Hellweg-Grundschule Soest-Ampen 1989 – 1998 Conrad-von-Soest -Gymnasium Soest Abschluss: Abitur Berufliche Laufbahn: 1998 – 1999 allgemeine Ausbildung zum Luftwaffenoffizier 1999 – 2003 Hochschulstudium der Elektro- technik an der Universität der Bundeswehr Hamburg Abschluss: Dip.- Ing. 2003 – 2005 Ausbildung zum Flugabwehrrake- tenoffizier Patriot und Verwendung als Zugführer in Oldenburg 2005 – 2008 Wissenschaftlicher Mitarbeiteroffi- zier am Institut für Elektrische Maschinen und Antriebe an der Helmut-Schmidt-Universität/ Universität der Bundeswehr Hamburg Abschluss: Dr.-Ing.



![Management thermischer Verletzungen im Kindesalter · gendlichen >5 Jahre für Jungen eher abzunehmen [1]. Management thermischer Verletzungen im Kindesalter Ingo Königs, Miriam](https://img.pdfslide.tips/doc/110x75/5f5a206a05bac7660356853f/management-thermischer-verletzungen-im-kindesalter-gendlichen-5-jahre-fr-jungen.jpg)