Embed Size (px)
Citation preview

Anatomia ComputacionalFrederico Maradei Carneiro de Sousa5, Gabriel Del Cesare Barros2, GustavoAugusto de Oliveira Alves Pimenta3, Jhulia Graziella de Souza Rodrigues5,Leonardo Hideo Kanashiro4, Letıcia Leandro Batista5, Michele da Costa
Figueiredo6, Paulo Vitor Ludewig Varela7, Thaila Ferreira Zaruz5, Thalles OliveiraCampagnani1, Victor Camargo Melo4, Xie Jiayu7
1 Centro Federal de Educacao Tecnologica (CEFET)
2Universidade Federal de Pernambuco (UFPE)
3Universidade Federal de Sao Joao del-Rei (UFSJ)
4Universidade Federal de Sao Paulo (UNIFESP)
5Universidade Federal de Uberlandia (UFU)
6Universidade Federal de Vicosa - Campus de Rio Paranaiba (UFV-CRP)
7Universidade Tecnologica Federal do Parana (UTFPR)
[email protected], [email protected],
[email protected], [email protected],
[email protected], ll [email protected],
michele [email protected], [email protected],
[email protected], [email protected],
[email protected], xie [email protected]
Resumo. Nesse texto sera feita uma introducao conceitual a Anatomia Com-putacional alem da descricao de algumas ferramentas matematicas necessariaspara a compreensao dessa area. Serao abordados aspectos historicos e praticosdo calculo de variacoes, partindo do problema da Braquistocrona, sua solucaopelo metodo de Euler-Lagrange e tambem mecanica de Hamilton . Na sequenciasera feita uma breve introducao sobre Controle Otimo e apresentados algunsexemplos. Ainda serao incluıdos conceitos sobre Geometria Diferencial, sendoos principais Geodesicas e Splines. Por fim serao feitas consideracoes sobregeodesicas num espaco de landmarks.
Abstract. In this text there will be a conceptual introduction to Computatio-nal Anatomy and the description of some mathematical tools needed to com-prehend this area. Historical and practical aspects of calculus of variationswill be addressed, starting with the Brachistochrone problem and its solution byboth Euler-Lagrange’s and Hamilton’s mechanics. Then there will be a briefintroduction on Optimal Control and some examples about it. There will also beincluded concepts on Differential Geometry, as Geodesic and Splines. Finallythere will be some considerations about geodesic in the space of landmarks.
1. IntroducaoO aumento de informacao de imagens medicas criou uma necessidade de se desenvol-ver metodos para estuda-las. Atraves disso, tem-se a anatomia computacional: uma area

crescente que trata da modelagem e comparacao de imagens anatomicas, visando iden-tificar anomalias estruturais e classifica-las. Assim, parte-se da hipotese de que patolo-gias podem ser detectadas atraves de imagens do organismo. Um objetivo da anatomiacomputacional e desenvolver ferramentas quantitativas para estudar as variabilidades fi-siologicas, tornando o diagnostico medico mais pratico e simples. Para tal, e necessariouso de ferramentas matematicas e computacionais.
O estudo de variacoes biologicas e um problema antigo, pontuado desde 1917 porD’Arcy Thompsom em seu livro “On Growth and Form”. Neste, sao citadas dificuldadesde se estudar morfologia. O principal ponto e que deve-se comparar formas aproximadase relacionadas, e nao formas definidas entre si. Apesar de uma figura deformada ser defacil compreensao, sua analise e difıcil de ser realizada.
Uma formulacao matematica rigorosa desta ideia foi desenvolvida por Grenandere Miller de acordo com os princıpios de Pattern Theory. A comparacao e reconhecimentode imagens apesar de suas deformacoes pode ser feito atraves de recursos matematicos,como difeomorfismos - funcoes suaves inversıveis, preservam a topologia e sao passıveisde se trabalhar em dimensao infinita. Desta forma, podem ser caracterizadas subvariacoesde pontos, curvas, superfıcies e subvolumes formando a configuracao anatomica. Comorelacoes entre estruturas globais sao mantidas, e possıvel estabelecer correspondenciasentre diferentes imagens adquiridas e compara-las, codificando e transferindo o posicio-namento da informacao biologica contida em cada uma.
Uma forma de se estudar tais deformacoes e atraves de templates - modelos querepresentam situacoes tıpicas. Assim, pode-se modelar o cerebro de um paciente queesta comecando a desenvolver Alzheimer e relacionar com a ressonancia magnetica docerebro de um paciente especıfico. Desta forma, pode-se comparar os dados e assim,formular diagnosticos sobre a saude do paciente.
Neste paper serao introduzidos algums dos fundamentos matematicos envolvidosem anatomia computacional, como a equacao de Euler-Lagrange, metodos de controleotimo - como Pontryagin, Bellman, casos de geometria diferencial entre outros.
2. O problema de BraquistocronaO problema de Braquistocrona foi proposto em Junho de 1696 por Johann Bernoulli, narevista mensal alema Acta Eruditorum, como um desafio aos matematicos da epoca.
”Eu, Johann Bernoulli, me direciono ao matematico mais brilhante domundo. Nada e mais atraente para pessoas inteligentes do que um pro-blema honesto e desafiador, cuja solucao possivelmente trara fama e per-manecera como um monumento duravel. Seguindo o exemplo dado porPascal, Fermat, etc., eu espero receber a gratidao de toda a comunidadecientıfica colocando diante dos melhores matematicos do nosso tempo umproblema que testara seus metodos e a forca do seu intelecto. Se alguemme comunicar a solucao do problema proposto, eu irei publicamente de-clara-lo digno de louvor.”Eis o enunciado proposto por Bernoulli:”Dados dois pontos A e B num plano vertical, qual e a curva tracadapor um ponto onde ha apenas a acao da gravidade e que comece em A echegue em B no menor tempo possıvel.”

Figura 1. Ilustracao grafica do problema da Braquistocrona
Por volta de 1766, Leonhard Euler refinou metodos ja existentes e, mesmo naoconseguindo resolve-lo, sua contribuicao foi fundamental para a solucao encontrada porJoseph Lagrange, mostrada a seguir.
O tempo dt gasto para percorrer cada subcurva de comprimento ds e dt = dsv
,onde v e a velocidade naquele ponto.
O caminho total a ser percorrido e a soma de todos os ds de meor comprimento queestao sobre a curva desejada. Portanto, ∆s =
∫ BA
ds. Considerando ds suficientementepequenos, podemos aproximar seu valor pelo Teorema de Pitagoras, conforme ilustradopela Figura 2.
Figura 2. Aproximacao ds
Podemos entao aproximar ds por:
ds2 = dx2 + dy2

ds =√
dx2 + dy2
Onde dx representa sua variacao no eixo x, e dy sua variacao no eixo y.
Pelo princıpio da conservacao de energia mecanica, desconsiderando o atrito, te-mos:
KA + VA = K + V
Onde KA e VA sao, respectivamente, a energia cinetica e a potencial gravitacionalda partıcula no ponto A e K e V sao as energias cinetica e o potencial gravitacional emum ponto generico.
Considerando o ponto A como referencial para altura e a velocidade inicial como0, KA = VA = 0. Assim:
K + V = 0
1
2mv2 −mgy = 0
Isolando v:v =
√2gy
Portanto, o tempo T que queremos minimizar e:
T =
∫ B
A
ds
v
Substituindo ds e v:
T =
∫B
A
√dx2 + dy2√
2gy
Colocando dy em evidencia, temos:
T =
∫B
A
√1 + x′2√
2gy
onde x′ = dxdy
.
2.1. Calculo de variacoes
Pelo enunciado proposto, desejamos encontrar uma curva onde T seja minimizado. Nocalculo de variacoes, encontrar um extremo relativo significa encontrar maximos oumınimos de funcoes contınuas dentro de um espaco funcional. Assim, ao inves de en-contrar o valor x que maximize uma funcao f(x), queremos agora localizar uma funcaof(x) para a qual o funcional F (f) seja um extremo.
F (f) =∫g(x, f, f , f , ...)dx

Assim, e necessario citar a equacao de Euler-Lagrange, que tem como objetivoencontrar o extremo de um funcional e se caracteriza como uma equacao diferencial naqual as solucoes sao funcoes estacionarias em uma dada funcao.
Deducao da equacao de Euler-Lagrange: Considerando o problema da Braquistocrona,e que q seja a curva considerada. Podemos escolher outra infinitesimalmente proximaa esta, q + ∆q, que possui as mesmas extremidades nos pontos de origem e destino,buscando nos aproximar da curva desejada, a que minimiza o tempo T , conforme ilustradoa seguir.
Figura 3. Variacao na curva de Lagrange
Desta forma, o funcional que queremos minimizar e
T =
∫L(q, q, t)dt , onde
{q → x
t→ y
Como o acrescimo de ∆q provoca um acrescimo infinitesimal em ∆T , temos:
∆T =
∫ tf
t0
[L(q + ∆q, q + ∆q, t)− L(q, q, t)]dt
.
Expandindo em serie de Taylor o termo L(q, q, t) em torno de q e considerandoapenas os termos ate a primeira ordem dessa expansao, temos:
g(q) = L(q, q, t) +
[∂L
∂q(q − q0) +
∂L
∂q(q − q0)
]Seja:
∆q = ε~u

∆q = ε~u
Substituindo na integral, temos:
∆A =
∫ tf
t0
L(q+∆q, q+∆q, t)dt ≈
∫tf
t0
[L(q, q, t)+ε
[∫ tf
t0
(∂L
∂q~u+
∂L
∂q~u
)]−L(q, q, t)
]dt
que equivale a
∆A =
∫ tf
t0
ε
(∂L
∂q~u+
∂L
∂q~u
)dt
Como queremos achar um extremo, um T mınimo, entao sua derivada deve serigual a 0. Ou seja, ∆T = 0, o que implica em:
∆T =
∫ tf
t0
(∂L
∂q~u+
∂L
∂q~u
)dt = 0
Trabalhando com o segundo termo da integral:∫ tf
t0
(∂L
∂q~u
)dt
que, ao integrarmos por partes, denotamos:
f =∂L
∂q⇒ f ′ =
d
dt
∂L
∂q
eg′ = ~udt⇒ g = ~u
Assim, a integral fica:∫ tf
t0
(∂L
∂q~u
)dt = (f · g)
∣∣∣∣tft0
−∫ tf
t0
g · f ′
=
(∂L
∂q~u
)∣∣∣∣tft0
−∫ tf
t0
(~u
d
dt
∂L
∂q
)dt
Notemos acerca do termo de fronteira que:(∂L
∂q~u
)∣∣∣∣tft0
= 0
Aplicando os limites tf e t0 no vetor ~u, temos 0 como resultado, visto que a curvaq e a curva q + ∆q coincidem nos pontos inicial e final.

Assim, temos que o segundo termo da integral inicial e apenas:
−∫ tf
t0
(~u
d
dt
∂L
∂q
)dt
Juntando com o primeiro termo e colocando o vetor ~u em evidencia, temos:∫ tf
t0
~u
(∂L
∂q− d
dt
∂L
∂q
)dt = 0
Como o vetor ~u 6= 0⇒ ∂L∂q− d
dt∂L∂q
= 0
Por fim, deduzimos a equacao de Euler-Lagrange:
d
dt
∂L
∂q=∂L
∂q
que e uma equacao diferencial de segunda ordem em q(t).
Notemos que a vantagem de colocar o dy em evidencia e obter zero no lado direitoda equacao diferencial de Lagrange, isto e, ∂L
∂q= ∂L
∂x= 0, visto que o L nao depende de x.
Caso dx estivesse em evidencia, terıamos o q correspondendo a y. Assim, o lado direitoda equacao seria: ∂L
∂q= ∂L
∂y6= 0, pois L dependeria de y.
Resolvendo a equacao diferencial da Braquistocrona atraves do lagrangeano, oobjetivo sera minimizar o funcional:
F =
∫L(x, x, y)dt
onde x e a derivada de x em relacao a t.
L =
√1 + x′2√
2gy
Aplicando a relacao obtida na deducao da equacao de Euler-Lagrange temos:
d
dt
∂L
∂q=∂L
∂q
onde q representa a quota x. Derivando, temos:
d
dt
[1√2gy
x′√1 + x′2
]= 0
ou seja, 1√2gy
x′√1+x′2
e constante em relacao a y. Daı
x2
1 + x2= a2y

que e equivalente a:x2
1 + x2=a2y
1
Sabe-se que, em uma equacao, o que e aplicado de um lado deve ser tambem apli-cado no outro de forma que a igualdade seja preservada. Desta forma, do lado esquerdoo numerador sera subtraıdo de seu proprio denominador, o que sera feito tambem do ladodireito.
x2
1 + x2 − x2=
a2y
1− a2y
Isolando x, temos:
x =
√a2y
1− a2y=⇒ x =
∫ √a2y
1− a2ydy
Uma substituicao adequada e y = r(1− cos θ), com θ = [0, 2π].
y = r(1− cos θ)
dy = r sin θdθ
Substituindo y e dy, temos:
x =
∫ √a2r(1− cos θ)
1− a2r(1− cos θ)r sin θdθ
Usando relacoes trigonometricas:
1− cos θ = 2 sin2(θ
2)
1 + cos θ = 2 cos2(θ
2)
sin 2θ = 2 sin θ cos θ
E tomando a2r =1
2, temos:
x =
∫a√r
√1− cos θ√
(1− a2r) + a2r cos θr · 2 sin
(θ
2
)cos
(θ
2
)dθ
=
∫1√2
√2 sin
(θ2
)√(1− 1
2
)+ 1
2cos θ
r · 2 sin
(θ
2
)cos
(θ
2
)dθ
=
∫sin
(θ
2
)√
12(1 + cos θ)
r · 2 sin
(θ
2
)cos
(θ
2
)dθ

=
∫√
2sin(θ2
)√
2 cos(θ2
)r · 2 sin
(θ
2
)cos
(θ
2
)dθ
=
∫sin(θ2
)cos(θ2
)r · 2 sin
(θ
2
)cos
(θ
2
)dθ
= r
∫2 sin2
(θ
2
)dθ
= r
∫(1− cos θ)dθ
Temos, portanto a equacao de x e
x = r(θ − sin θ)
que corresponde exatamente a curva da cicloide.
Logo, a curva que resolve o problema da Braquistocrona e a cicloide cujaparametrizacao e: {
x = r(θ − sin θ)y = r(1− cos θ)
3. Pendulo Esferico
3.1. Introducao
Apesar de a mecanica newtoniana ser amplamente aplicada e direta matematicamente,em alguns casos pode ser conveniente outra formulacao para solucao de tais sistemas.Atraves da mecanica lagrangeana ou hamiltoniana, equivalentes a de Newton, podemosgerar equacoes mais simples de serem resolvidas em sistemas expressos em termos deenergia, nao forcas. Assim, sao uteis quando utilizadas coordenadas nao usuais. Umexemplo a ser trabalhado e o pendulo esferico.
O pendulo se move em R3 acompanhando a superfıcie de uma esfera. Assim,podemos trabalhar com esfericas em cartesianas, de forma a serem trabalhadas isolada-mente.
Seja esse composto de uma partıcula de massa m preso a extremidade de umahaste inextensıvel, de comprimento r presa a origem. Assim, havera dois graus de liber-dade no problema, sendo eles φ, latitude - variando de 0 a π entre o plano XY e a haste- e θ, longitude - variando de 0 a 2π entre o eixo X positivo e a haste projetada no planoXY, como indicado abaixo:
SejaX o vetor posicao da partıcula na esfera. Logo, parametrizandoX em funcaode θ e φ,temos:
X =
xyz
= r
cosφ cos θcosφ sin θ
sinφ

Figura 4. Ilustracao pendulo esferico
Como θ e φ estao em funcao do tempo, derivando em relacao a este temos:
X =∂X
∂θ+∂X
∂φ= r
− cosφ sin θcosφ cos θ
0
θ + r
− sinφ cos θ− sinφ sin θ
cosφ
φ
Iremos considerar a gravidade e desconsiderar todas forcas dissipativas. SendoX = v a energia cinetica K e dada por:
K =1
2mv2 =
1
2m(r2 cos2 (φ) θ2 + r2φ2
)E sendo h = z = r sinφ, a energia pontencial U e:
U = mgh = mgr sinφ
3.1.1. Mecanica de Lagrange
A mecanica de Lagrange e uma formulacao da mecanica classica que combina aconservacao do momento linear com a conservacao da energia. Seu elemento centrale a funcao lagrangeana (L), definida pela diferenca da energia cinetica e a pontencial dosistema, resumindo a dinamica em uma expressao muito simples.
Assim, atraves da funcao lagrangeana, temos:
L = K − U =1
2mr2
(φ2 + cos2 (φ) θ2
)−mgr sin (φ)
As funcoes θ(t) e φ(t) que tornam o lagrangeano estacionario sao as que satisfa-zem:
d
dt
∂L
∂q=∂L
∂q

Onde:
q =
(θφ
)
q =
(θ
φ
)Entao, temos que:
φ =∂L
∂φ= − cos (φ) sin (φ) θ2 − g
rcos (φ)
θ =∂L
∂θ= 2 tan (φ) θ
3.1.2. Metodo de Hamilton
A Mecanica Hamiltoniana visa substituir as variaveis velocidades generalizadas porvariaveis impulso generalizadas, tambem conhecida como momentos conjugados.
O Hamiltoniano representa a energia do sistema. Dada pela soma da energiacinetica e potencial, assim:
H = K + U =1
2mr2
(φ2 + cos2 (φ) θ2
)+mgr sin (φ)
Momentos generalizados (ou momento canonico conjugado) sao as derivadas deum lagrangiano em relacao a derivada temporal de uma coordenada generalizada, ou seja:
p =∂L
∂p
Logo:
pθ =∂L
∂θ= mr2 cos2 (φ) θ
epφ =
∂L
∂φ= mr2φ
Sabendo os momentos generalizados e possıvel isolar e substituir θ e φ nasequacoes anteriores:
H =1
2mr2
(p2φ +
p2θcos2 φ
)+mgr sinφ
Ficando assim as equacoes de movimento de Hamilton:
θ =∂H
∂pθ=
pθmr2 cos2 φ

φ =∂H
∂pφ=
pφmr2
pθ = −∂H∂θ
= 0
pφ = −∂H∂φ
p2φ sinφ
mr2 cos3 φ+mgr cosφ
Como apenas a gravidade atua sobre o sistema, e esta nao modifica as propriedadesem θ, nao ha momento. Assim, o hamiltoniano nao depende de θ e e imediato que ∂H
∂θ= 0.
Obtendo as aceleracoes em cada coordenada e derivando em relacao a ela mesmatemos:
φ = 2 tanφθφ
eθ = −φ cosφθ2
Curiosidade:
A mecanica celeste e o ramo da astronomia que estuda a dinamica de corposque estao sob interacao gravitacional.
Um de seus problemas de maior notoriedade e o problema dos n − corpos,que busca determinar a equacao do movimento de n corpos quando eles estao sujeitosapenas a atracao gravitacional mutua. Ele foi proposto por Johannes Kepler em 1609no livro Astronomia Nova, baseado nas observacoes de Nicolau Copernico e em dadosde 14 anos do observatorio de Tycho Brahe. Em 1687, Newton resolveu para o caso den = 2, porem ate hoje nao ha solucao geral para n ≥ 3, apenas para certas condicoesparticulares.
4. GeodesicasO conceito de geodesica surge pela primeira vez no estudo da forma da Terra pelos ma-tematicos, fısicos e astronomos gregos, tanto que seu significado e ”divisao da Terra”emgrego. O problema surge em determinar o menor caminho entre dois lugares, tais comoduas cidades diferentes ao longo do nosso globo terrestre, porem por terem barreirasnaturais, tais como montanhas, rios e lagos, determinar esse menor caminho era muitotrabalhoso.
Diversos matematicos contribuıram para o estudo sobre as geodesicas, recebendonovas adaptacoes de acordo com a superfıcie onde e estudada. Assim convenciounou-se adefinicao matematica da geodesica como a menor curva que liga um par de pontos sobreuma superfıcie dada qualquer.
No calculo das variacoes, a geodesica recebe uma definicao um pouco mais es-pecıfica, pois o calculo das variacoes trabalham com funcionais que possuem relacaocom as variaveis e suas derivacoes.
I[f ] =
∫ b
a
−h(x, f(x), f ′(x), f ′′(x)...)dx

O calculo tem como objetivo encontrar uma funcao f(x) tal que o funcional I[f ]atinja um valor de extremo. Para isso, calculamos uma integral com dependencia em x,na funcao f(x) e suas derivadas e a igualamos a zero, pois assim acharemos sabemos queestamos num ponto de extremo.
A solucao fornecida ao se resolver esse problema e dita uma geodesica da su-perfıcie na qual trabalhamos. Surge entao, uma definicao mais apropriada para o calculovariacional dizendo que a geodesica e uma curva diferenciavel tal que a derivada em todasas suas variacoes e zero.
Uma vez que achamos o funcional, conseguimos definir bem a integral que geranosso funcional, podemos entao aplicar metodos do calculo das variacoes para conseguir-mos obter a equacao de curva tal que minimiza o tamanho da curva, sendo possıvel serobtida pelos metodos que serao mostrados a seguir.
A obtencao da formula da geodesica pelo metodo da derivada covariante e dadapor um difeomorfismo entre a coordenadas na superfıcie dada com sua correnspondenciade coordenadas na superfıcie R2. Isto e importante para garantir que a nossa geodesicaestudada na superfıcie tenha as mesma propriedades que a reta noR2 assim sendo o menorcaminho, alem das suas derivacoes serem equivalentes nas suas respectivas superfıcies.
Para encontrarmos as equacoes diferenciais que representam a geodesica em umasuperfıcie de uma forma geometrica, e necessario a parametrizacao dessa superfıcie paraobter seu sistema de coordenadas de pontos.
Depois de obtida o sistema de coordenadas, nos derivamos parcialmente o nossovetor posicao por cada coordenada e projetamos no plano tangente a superfıcie, assimencontrando os coeficientes de primeira ordem.
Assim realizamos as combinacoes escalares dos vetores parcialmente derivadospelas coordenadas e depois usamos os Sımbolos de Christoffel. Achando os valores dosvetores parcialmente derivados, e igualando-os a zero (sabendo pelo calculo das variacoesque a derivada nas variacoes e nula) chegamos as equacoes diferenciais tais que descrevema geodesica nessa superfıcie.
Em algumas superfıcies as equacoes encontradas possuem solucao analitica facilde ser encontrada, porem para grande parte das superfıcies e necessario a programacao deum algoritmo para calcular uma solucao numerica. Vamos agora exemplificar a seguir osmetodos de calcular as geodesicas.
4.1. Geodesicas no Toro Curvo
Para o estudo de geodesicas do Toro Curvo sera utilizado o toro obtido ao se rotacionaruma circunferencia de raio r, que possui centro no Eixo X a uma distancia R do ponto deintersecao do Eixos coordenados, e altura no Eixo Z. Assim as equacoes que descrevemtodos os pontos de sua superfıcie sao escritas em funcao de θ e φ. Abaixo esta descrita aequacao do Toro na forma parametrica:
x = (R + r cos θ) cosφ
y = (R + r cos θ) sinφ
z = r sin θ

Realizando as multiplicacoes, temos:
x = R cosφ+ r cos θ cosφ
y = R sinφ+ r cos θ sinφ
z = r sin θ
Escrevendo as equacoes parametricas do toro na forma de coordenadas temos:
X = (R cosφ+ r cos θ cosφ, R sinφ+ r cos θ sinφ, r sin θ)
Realizando agora as derivadas parciais do vetor X em funcao das variaveis θ e φobtemos os novos pares de vetores abaixo:
Xφ = (−R sinφ− r cos θ sinφ, R cosφ+ r cos θ cosφ, 0)
Xθ = (−r cosφ sin θ, r sin θ sinφ, r cos θ)
Com estes vetores podemos escrever os coeficientes de primeira ordem fundamen-tal do Toro Curvo, esses sao obtidos atraves da combinacao do produto vetorial do doisvetores acima, e sao denomidados E, G e F, onde:
E = 〈Xφ, Xφ〉G = 〈Xθ, Xθ〉F = 〈Xφ, Xθ〉
Estes coeficientes representam um mapeamento da superfıcie que se esta traba-lhando e sua representacao se da em forma de matrix, como esta representado abaixo:[
E FF G
]Realizando os produtos escalares temos:
〈Xθ, Xθ〉 = r2 sin2 θ cos2 φ+ r2 sin2 θ sin2 φ+ r2 cos2 θ
〈Xθ, Xθ〉 = r2 sin2 θ(cos2 φ+ sin2 φ) + r2 cos2 θ
〈Xθ, Xθ〉 = r2 sin2 θ + r2 cos2 θ
〈Xθ, Xθ〉 = r2(sin2 θ + cos2 θ)
〈Xθ, Xθ〉 = r2
〈Xθ, Xφ〉 = Rr2 sin θ sinφ cosφ+ r2 sin θ cos θ sinφ cosφ− r2 sin θ cos θ sinφ cosφ−Rr2 sin θ sinφ cosφ+ 0
〈Xθ, Xφ〉 = 0
〈Xφ, Xφ〉 = R2 sin2 φ+ 2Rr sin2 φ cos θ + r2 cos2 θ sin2 φ+R2 cos2 φ+ 2R cos θ cos2 φ+ r2 cos2 θ cos2 φ+ 0
〈Xφ, Xφ〉 = R2(sin2 φ+ cos2 φ) + 2Rr cos θ(sin2 φ+ cos2 φ) + r2 cos2 θ(sin2 φ+ cos2 φ)
〈Xφ, Xφ〉 = R2 + 2Rr cos θ + r2 cos2 θ

〈Xφ, Xφ〉 = (R + r cos θ)2
Apos obter os valores de E, G e F, e possıvel resolver os Sımbolos de Christoffel:
Γ111 =
Eφ2E
Γ111 =
0
2(R + r cos θ)2= 0
Γ112 =
Eθ2E
Γ112 =
−2(Rr sin θ + r2 sin θ cos θ)
2(R + r cos θ)2=−2r sin θ(R + rcosθ)
2(R + r cos θ)2=−r sin θ
R + r cos θ
Γ122 = −Gφ
2E
Γ122 = − 0
2(R + r cos θ)2= 0
Γ211 = −Eθ
2G
Γ211 = −−2(Rr sin θ + r2 sin θ cos θ)
2r2=
(R sin θ + r sin θ cos θ)
r=
sin θ(R + r cos θ)
r
Γ212 =
Gφ
2G
Γ212 =
0
2r2= 0
Γ222 =
Gθ
2G
Γ222 =
0
2r2= 0
Substituindo-se todos os valores encontrados na equacao do vetor tangente e igua-lando os coeficientes de Xθ e de Xφ a zero, temos a equacao das geodesicas no Toro:
DXx = (φ+ φ2Γ111 + φθΓ1
12 + θφΓ121 + θ2Γ1
22)Xφ + (θ + θ2Γ111 + φθΓ1
12 + θφΓ121 + φ2Γ1
22)Xθ
DXx = (φ+ 2φθ−r sin θ
R + r cos θ)Xφ + (θ + θ2
sin θ(R + r cos θ)
r)Xθ
Logo temos o sistema de equacoes difereciais que representam as geodesicas deum Toro Curvo:
φ+ 2φθ−r sin θ
R + r cos θ= 0

θ + θ2sin θ(R + r cos θ)
r= 0
Existe tambem o Toro Plano, o metodo para calculo das geodesicas neste, segueo mesmo caminho do Toro Curvo, a diferenca entre eles e que o Toro Plano nao podeser representado em R3. assim o calculo da equacao de sua geodesica em dimensao 3 econceitual, assim nao e possivel representar as geodesicas geometricamente com imagens.
5. Controle Otimo
O objetivo dos problemas de controle otimo e determinar os sinais de controle que aplica-dos a um sistema controlado satisfacam restricoes fısicas e, ao mesmo tempo, minimizeou maximize algum criterio.
Um sistema e caracterizado pelas suas variaveis de estado ~x e suas variaveis decontrole ~u, podendo ambos vetores terem quantas dimensoes forem necessarias para omodelo selecionado.
Uma das partes da solucao de um problema de controle otimo e escolher ou de-senvolver um modelo adequado, que, ao mesmo tempo, seja tratavel e preveja o compor-tamento do sistema para todos os controles possıveis.
O criterio de performance pode ser dado de 3 maneiras equivalentes:
• Forma de Lagrange:
C =
∫ T
0
I(t, x(t), u(t))dt
Nessa forma, a performance e “medida” por uma integral de uma funcao in-termediaria que pode depender do tempo e/ou das variaveis de estado e/ou dasvariaveis de controle.
• Forma de Mayer:C = I(0, x(0), T, x(T ))
Nesse caso, a performance depende de alguma funcao que depende somente dostempos inicial e final e dos estados inicial e final.
• Forma de Bolza:
C = I(0, x(0), T, x(T )) +
∫ T
0
I(t, x(t), u(t))dt
Sendo esta uma mistura das duas formas anteriores.
6. Metodo de Pontryagin
Em problemas fısico-matematicos 1, e necessario maximizar ou minimizar um funcionalde custo C, que e objetivo de todo estudo e analise de controle otimo.
1Possui tambem aplicacoes em economia, em ecologia, na industria. Sao varias as areas de aplicacao.

O princıpio mınimo de Pontryagin e utilizado para encontrar o controle otimoem otimizacoes dinamicas.Caso o objetivo seja minimizar o funcional C, e equivalentemaximizar o oposto do C.
Em geral, um problema de controle otimo envolve as seguintes variaveis:
• tempo t: e dado o intervalo de t0 ≤ t ≤ t1 na qual queremos analisar o problema• funcao de estado x• equacoes de dinamica x
Para o caso do metodo de Pontryagin, chamaremos x de vetor de controle, u(t), ex = f(u, x, t).
O funcional cujo extremo queremos achar e da forma:
max J =
∫ t1
t0
I(x(t), u(t), t)dt+ F (x1, t1)
onde a integral de I e analoga ao lagrangeano ja visto anteriormente. A segundaparcela, F (x1, t1), e chamada de funcao final.
Introduziremos as variaveis de coestado y(t) = (y(t1), y(t2), ..., yn(t)),que estaorelacionadas a cada equacao diferencial da dinamica. Sao equivalentes aos multiplicado-res de Lagrange em problemas estaticos. Assim, o novo lagrangeano e dado por:
L = J +
∫ t1
t0
y[f(x, u, t)− x]dt
=
∫ t1
t0
[I(x, u, t) + y[f(x, u, t)− x]
]dt+ F (x1, t1)
Temos agora as funcoes de coestado multiplicando o vetor de restricoes, comomostra acima.
Como feito na deducao da equacao de Euler-Lagrange, tomaremos aqui umavariacao na variavel coestado, y(t) + ∆y(t). Temos entao:
∆L =
∫ t1
t0
∆y[f(x, u, t)− x]dt
Como a solucao e um ponto estacionario, entao ∆L = 0. Vale ressaltar que asfuncoes de coestado criados artificialmente sao nao-nulas, ou seja:
∆L = 0 =⇒ x = f(x, u, t)
.
Obter as equacoes da dinamica aqui e analoga a obter restricoes em problemasestaticos.
Como:
L =
∫ t1
t0
[I(x, u, t) + y[f(x, u, t)− x]]dt+ F (x1, t1)

=
∫ t1
t0
[I(x, u, t) + yf(x, u, t)]dt−∫ t1
t0
(yx)dt+ F (x1, t1)
Integrando por partes o termo∫ t1t0
(yx)dt obtemos:
L =
∫ t1
t0
[I(x, u, t) + yf(x, u, t) + yx]dt+ F (x1, t1)− [y(t1)x(t1)− y(t0)x(t0)]
Vale salientar que as duas primeiras parcelas do integrando acima sao a definicaodo Hamiltoniano, isto e:
H(x, u, y, t) ≡ I(x, u, t) + yf(x, u, t)
Alem disso, uma variacao do controle de u(t) para u(t) + ∆u(t) correspondera auma variacao na trajetoria de estado de x(t) para x(t) + ∆x(t).
∆L =
∫t1
t0
[∂H
∂u∆u+
(∂H
∂x+ y
)∆x
]dt+
[∂F
∂x1− y(t1)
]∆x1
Como ∆L = 0 e ∆u 6= 0 e ∆x 6= 0, entao e facil concluir que:∂H∂u
= 0
y = −∂H∂x
y(t1) = ∂F∂x1
A quarta equacao do metodo de Pontryagin vem da equacao hamiltoniana:
H(x, u, y, t) = I(x, x, t) + yx
Derivando a expressao acima em relacao a y, temos:
x =∂H
∂y
Portanto, deduzimos as condicoes (tambem chamadas de equacoes canonicas) quepelo metodo de Pontryagin devem satisfazer:
∂H∂u
= 0
y = −∂H∂x
y(t1) = ∂F∂x1
x = ∂H∂y
Resumindo, o metodo de Pontryagin envolve adicionar n variaveis de coestadoy(t), definindo o hamiltoniano como:
H(x, u, y, t) = I(x, u, t) + yf(x, u, t)

e encontrar a solucao das trajetorias u(t), y(t) e x(t) satisfazendo:
max H(x, u, y, t)∂H∂u
= 0
y = −∂H∂x
y(t1) = ∂F∂x1
x = ∂H∂y
6.1. Logıstica para o carnaval
Neste problema buscaremos minimizar, atraves do metodo de Pontryagin mostrado anteri-ormente, o custo de producao das fantasias para o carnaval. Para se modelar um problema,precisamos compreende-lo. Sabemos que, por exemplo, no fim do perıodo de carnaval, asescolas de samba ja comecam a se preparar para o proximo ano. Porem, devemos lembrarque ha um custo de armazenamento para as pecas, o que nos faz deduzir que produzı-las muito cedo nao seria favoravel. Alem disso, quanto mais proximo do carnaval elasforem feitas, maior sera o custo com as costureiras - ja que quanto menos tempo paraconfeccionar maior sera o valor cobrado.
Como nao temos nenhuma fantasia no tempo inicial t0, temos como condicaoinicial:
x(0) = 0
Onde x(t) e o numero de fantasias produzidas no tempo t(dias). Como seraoproduzidas X fantasias em um ano, a condicao final e:
x(365) = X
Sabemos que o custo total depende do tempo e da quantidade. Seja f(x) umafuncao que determina o preco em relacao a dx
dt= x. Assim temos:
C1 =
∫ T
0
f(x)dx
Mas dx = xdt, portanto:
C1 =
∫ T
0
f(x)xdt
Definimos f(x) = bx, para simplificar.
O armazenamento que e dado por:
C2 =
∫ T
0
Cx(t)dt
onde C e o custo de armazenamento por peca em funcao tempo.

Entao, a funcao Custo F e:
F =
∫ T
0
Cx(t)dt+
∫ T
0
(bx)xdt
Desenvolvendo temos:
F =
∫ T
0
(Cx+ bx2)dt
Como queremos minimizar o custo, maximizamos −(Cx+ bx2). E temos:
F =
∫ T
0
−(Cx+ bx2)dt
Onde −(Cx+ bx2) e a funcao intermediaria.
Devido ao maior custo em um tempo extremo, podemos considerar que para ummenor custo, x(t) devemos utilizar uma equacao de segundo grau. Assim: x(t) = a1t
2 +b1t
Temos que a equacao de estado e:
x = u
O Hamiltoniano e dado por:
H = I + f(x, u, t)y
Assim:H = −Cx− bu2 + uy
Temos tambem que:∂H
∂u= 0 = −2bu+ y
Isolando o u, temos:u =
y
2b
Substituindo em H:
H = −Cx− b(y
2b
)2
+ yy
2b
H = −Cx− y2
4b+ fracy22b
H = −Cx+y2
4b

Determinamos x e y pelas seguintes equacoes:
y = −∂H∂x
x =∂H
∂y
Logo:
y = C
x =y
2b
Resolvendo a primeira equacao diferencial,temos:
y(t) = Ct+ c1
Substituindo y na segunda equacao diferencial, temos:
x =Ct+ c1
2b
Resolvendo, temos:
x(t) =Ct2
4b+c1t
2b
Determinando c1 pela condicao final x(365) = X:
X =C(3652)
4b+c1(356)
2b
c1 =2b(X − C(3652)
4b)
356)
c1 =2bX
365− C(365)
2
Substituindo em x(t) temos:
x(t) =Ct2
4b+ (
x
365− C(365)
4b)t
x(t) =C
4b(t2 − 365t) +
x
365t
Concluımos entao que a melhor curva que minimiza o custo e uma parabola comcavidade para cima. Portanto entende-se que e vantajoso produzir um pouco mais deva-gar no comeco da producao, afim de economizar com armazenamentos, do que no final.Entretanto nao e bom produzir muito devagar no comeco, ja que com um menor tempono final e muitas fantasias pode gerar um aumento no preco dado pelas costureiras paraproduzir as pecas. Logo temos que x(t) depende do custo de armazenamento por peca etempo ,C, e do preco das costureiras por quantidade e unidade de tempo b, dado segundoa equacao: f(x) = bx. Temos tambem que substituindo a condicao final x(365) = X ,determinamos c1 em funcao de X,C e b. Portanto depende tambem da quantidade defantasias a serem produzidas, X.

Figura 5. Grafico de producao das fantasias de carnaval × tempo
6.2. Pouso na lua (Soft landing)
6.2.1. Resolucao do ”Soft Landing”pelo Metodo de Pontryagin
O problema de ”Soft Landing” consiste na otimizacao do tempo T de pouso de um fo-guete localizado no ponto x0 com velocidade v0. Devemos considerar que a velocidadefinal deve ser 0 e que a lua, onde sera o pouso,esta na posicao x(T ) = 0.
Logo, os estados iniciais sao:
x(0) = x0
v(0) = v0
E os estados finais:
x(T ) = 0
v(T ) = 0
Como precisamos minimizar o tempo T , podemos usar o metodo de Pontryagin,maximizando −T . Entao:
F =
∫ T
0
−1dt
Assim, −1 e a funcao intermediaria.
Estabelecemos a seguinte restricao no controle:
|u| ≤ 1
Onde u e uma forca de empuxo, e esta restrito a uma capacidade maxima emınima.
Podemos usar a 2a Lei de Newton para modelar a equacao de estado:
F = ma

Considerando m = 1, temos:
x = u
Onde x representa a aceleracao.
Como a equacao de estado e uma equacao diferencial de segunda ordem, podemosdividı-la em duas de primeira ordem. Assim, temos que:
x = v
v = u
Temos que o hamiltoniano e dado por:
H = I + xy1 + vy2
Onde y1 e y2 sao os multiplicadores, associados a x e v respectivamente.
Logo:H = −1 + y1(v) + y2(u)
Analisando u, temos:
u =
{−1 se y2 < 0
1 se y2 > 0
Percebemos entao que se trate de uma situacao Bang-bang, na qual ocorre a pas-sagem do controle do maximo para o mınimo, ou seja, de−1 para 1. Podemos considerarque o multiplicador y2 troca de sinal instantaneamente, mas caso o multiplicador y2 for0, sera necessario possuir criterios especıficos para determinar u(t). Sendo u = −1 umempuxo na direcao contraria ao eixo x e u = 1 no sentido positivo de x.
Temos as equacoes de estado:
x = v
v = u
Para determinar y1 e y2 fazemos:
y1 =∂H
∂x⇒ y1 = 0
y2 = −∂H∂v⇒ y2 = −y1
Integrando y1 temos que:y1 = −C
Logo:y2 = C

Integrando y2 temos que:y2 = Ct+D
Para determinar o momento onde ocorre a troca de sinal, igualamos y2 a zero eisolamos o t. Assim:
t1 = −DC
Sendo t1 o tempo da troca de sinal de u .
Concluımos assim que t1 e o tempo entre a saıda do foguete da posicao x0 ateo a posicao onde ocorre a troca de sinal e t2 e o tempo entre a troca e a posicao finalx(T ) = 0. Logo, o tempo total e dado por:
T = t1 + t2
Considerando u = −1 no inıcio e u = 1 no final, temos:
x = −1
Integrando uma vez x temos:
x = v = −t+ v0
Integrando duas vezes x obtemos a solucao:
x =−1
2t2 + v0t+ x0
No instante t1 acontece a troca, assim temos que as condicoes iniciais para u = 1sao:
x1 =−1
2t21 + v0t1 + x0
v1 = −t1 + v0
Na segunda parte temos que:x = 1
Integrando uma vez x obtemos:
x = v = t2 + (−t1 + V0)
Integrando duas vezes x obtemos a solucao:
x =1
2t22 + (−t1 + v0)t2 +
(−1
2t21 + v0t1 + x0
)Temos que as condicoes finais sao: xf = 0 e vf = 0. Portanto:
xf =1
2t22 + (−t1 + v0)t2 +
(−1
2t21 + v0t1 + x0
)⇒ xf = 0

vf = t2 + (−t1 + V0)⇒ vf = 0
Isolando t1 da segunda equacao temos que:
t1 = t2 + v0
Substituindo na primeira, temos:
1
2t22 + (−(t2 + v0) + v0)t2 +
(−1
2(t2 + v0)
2 + v0(t2 + v0) + x0
)= 0
1
2t22 + (−(t2 + v0) + v0)t2 +
(−1
2(t2 + v0)
2 + v0(t2 + v0) + x0
)= 0
1
2t22 + (−t2 − v0 + v0)t2 + (
−1
2(t22 + 2t2v0 + v20) + v0t2 + v20 + x0) = 0
1
2t22 +−t22 −
1
2t22 − t2v0 −
v202
+ v0t2 + v20 + x0) = 0
−t22 +v202
+ x0 = 0
Resolvendo a equacao de segundo grau:
t22 =v202
+ x0
t2 =
√v202
+ x0
Assim
t1 =
√v202
+ x0 + v0
Entao o tempo total e :
T = t1 + t2
T = 2
√v202
+ x0 + v0
6.2.2. Resolucao do ”Soft Landing” pelo Metodo de Bellman
Utilizaremos agora, para resolucao do “Soft Landing”, o metodo de otimizacao de Bell-man, enunciado a seguir:
“Uma polıtica otima tem a propriedade de que, qualquer que seja o estadoinicial e a decisao (por exemplo, controle), as decisoes restantes devemconstituir uma polıtica otima no que diz respeito ao estado resultante daprimeira decisao”

Temos que o tempo no problema do pouso suave na lua dado no intervalo [0, T ].Sabemostambem que o tempo T depende da posicao inicial x0 e da velocidade inicial v0, portantoa funcao tempo que queremos encontrar e T (x0, v0).
Apos um tempo dt, temos que a velocidade e v0 + udt e a posicao x0 + v0dt ±12u2dt. Assim o metodo de Bellman consiste em minimizar o tempo considerando as
novas condicoes iniciais, T (xo + vodt ± 12u2dt, vo + udt). Temos tambem que o tempo
final e a soma decorrido dt com o novo tempo encontrado. Assim temos que:
T (xo, vo) = dt+ min T (xo + vodt±1
2u2dt, vo + udt)
Temos pela expansao em serie de Taylor que:
T (x+ ∆x, v + ∆v) = T (x, v) +∂T
∂x∆x+
∂T
∂v∆v + ...
Desconsiderando os termos de ordem superior na expansao de Taylor em relacaoa termos lineares, logo eliminamos ±1
2u2dt. Entao:
T (xo + vodt, vo + udt) = T (x0, v0) +
(∂T
∂xov0 +
∂T
∂vou
)dt
Logo:
T (xo, vo) = dt+Min
[T (x0, v0) +
(∂T
∂xov0 +
∂T
∂vou
)dt
]
Desenvolvendo:
0 = dt+
(∂T
∂xov0 +
∂T
∂vou
)dt
0 = dt
(1 +
∂T
∂xov0 +
∂T
∂vou
)
Considerando u = −1 para a situacao inicial, temos:
0 = dt
(1 +
∂T
∂xov0 −
∂T
∂vo
)
Assim temos a solucao :
0 = 1 +∂T
∂xov0 −
∂T
∂vo
Substituindo a solucao encontrada no metodo de Pontryagin, T = 2
√v202
+ x0+v0,verificamos a igualdade acima:

0 = 1 +
∂
(2
√v202
+ x0 + v0
)∂xo
v0 −∂
(2
√v202
+ x0 + v0
)∂vo
0 = 1−(v202
+ x0
)v0 +
(v202
+ x0
)v0 − 1
0 = 0
Observamos que o grafico da funcao aceleracao em relacao do tempo, u(t) apre-senta uma descontinuidade em t1, sendo constante −1 antes de t1, e 1 depois. O graficoda velocidade em funcao do tempo, v(t), descreve uma reta decrescente que comeca emv0, e uma reta crescente comecando em v1 (negativo) e no tempo t1 ate vf = 0. O graficoda funcao deslocamento em relacao do tempo, x(t), descreve uma parabola com cavidadepara baixo comecando em x0 quando u = −1 e para cima quando u = 1 terminado emx(T ) = 0. Assim o ponto maximo da primeira parabola e em x0, e o ponto mınimo nasegunda e em x(T ) = 0.
Figura 6. Grafico Aceleracao × Tempo

Figura 7. Grafico Posicao × Tempo
Figura 8. Grafico Velocidade × Tempo

Figura 9. Grafico Velocidade × Posicao
6.3. Heranca
Neste exemplo visamos otimizar a felicidade de uma pessoa em funcao do gasto de umaheranca recebida. O parametro s representa o decaimento da felicidade ao gastar o di-nheiro: quanto mais velha, menos feliz ficara ao gastar o dinheiro. O controle u(t) dizrespeito quanto dinheiro e gasto em funcao do tempo e o ln e relevante pois gastos muitoelevados nao influenciam muito na felicidade do que gastos um pouco mais moderados.Assim, o objetivo para este problema e maximizar o funcional
F =
∫ T
0
e−st lnu(t)dt (1)
e a variacao no dinheiro e dada por:
x = r.x− u = f (2)
onde r representa o rendimento do dinheiro (e.g. poupanca).
Para o princıpio de Pontryagin, o Hamiltoniano e definido como:
H = I + yf (3)
onde I e a funcao intermediaria que vem do funcional. Substituindo (1) e (2) em(3), temos:
H = e−st lnu+ y(rx− u) (4)

Pelo princıpio de Pontryagin,
∂H
∂u= 0⇒ e−st
u− y = 0
u =e−st
y(5)
A funcao de controle otimo tem essa caracterıstica. Entao o Hamiltoniano para afuncao otima, substituindo: (5) em (4)
H∗ = −st.e−st − e−st ln y + yrx− ye−st (6)
Por Euler-Lagrange,
y = −∂H∗
∂x= −yr
y =1
Ae−rt (7)
Onde a constante 1A
foi escolhida por conveniencia futura. Substituindo (7) em (2)
x = rx− u = rx− e−st
y= rx− e−st
1Ae−rt
= rx− Ae(r−s)t
Fazendo r − s = px = rx− Aept
dx
dt− rx = −Aept (8)
Resolvendo a equacao diferencial homogenea,
x−H = Bert
Utilizando o operador derivada na equacao (8)
(D − r)x = −Aept
x = −A 1
D − rept = −Aert
∫e−rteptdt
xD =A
sept
Como x = xH + xD
x = B.ert +A
sept (9)

Figura 10. Grafico do dinheiro em funcao do tempo para diversos valores de r es
Em que x(0) = x0, x(T ) = 0, ou seja, e recebida uma heranca de valor x0 emt = 0 e no fim do tempo o dinheiro deve ser completamente gasto.
Substituindo a primeira condicao de contorno em (9)
x0 = B +A
s⇒ A
s= x0 −B (10)
Substituindo As
de (10) em (9)
x = (x0 −B)ept +Bert (11)
Como x(T ) = 0
0 = x0epT +B
(erT − epT
)
B = − x0epT
erT − epT(12)
Para visualizacao foi escrita uma rotina em Octave que, dados os parametros x0,T , r e s plota o grafico do dinheiro em funcao do tempo.
Pode-se perceber a influencia dos parametros r e s no resultado otimo. Em pretor = 0, 08 e s = 0.03, ou seja, o ”fator de pressa”s e menor do que a lucratividade, portantocompensa mais gastar pouco dinheiro no comeco e deixa-lo render. Em verde, r = 0, 01e s = 0, 03, e gasto mais dinheiro mais cedo devido ao ”fator de pressa”. Em vermelho,r = s = 0, 03. Em azul, r = −0, 01 e s = 0, 03, como o dinheiro da prejuızo ao inves delucro e melhor gasta-lo antes.

6.4. Controle otimo do fluxo de agua em uma forma de gelo
O problema criado pelo professor Joao Luis Goncalves 2 trata da modelagem do preenchi-mento de uma forma de gelo com agua. Deseja-se que esse preenchimento seja eficiente.A eficiencia em questao pode significar minimizar o desperdıcio de agua ou minimizaro tempo necessario para encher a forma, entre outras possibilidades. Tambem usaremoseste problema como exemplo de otimizacao.
Dentre as possıveis aplicacoes, queremos estender esse problema de controleotimo para evitar enchentes controlando represas/reservatorios.
6.4.1. Modelo
O modelo proposto considera funcoes de estado e de controle. As funcoes de estadorepresentam o volume de agua em cada compartimento da forma em cada instante detempo. As funcoes de controle estao associadas a variacao de posicao da forma ao longodo tempo.
Para modelar o fenomeno, faremos algumas suposicoes simplificadoras. Conside-rando a forma com os compartimentos enumerados como na Figura 6.4.1, supomos que aagua sera adicionada apenas pelo compartimento 1, entrando a uma taxa constante iguala 1 e que a diagonal d da forma seja inclinada α graus em relacao ao plano horizontal,sendo o compartimento 1 o mais alto.
1 2 3
4 5 6
da
b
Supomos ainda que a agua nao muda de compartimento atraves da direcao dia-gonal do compartimento, por exemplo, na Figura 6.4.1, a agua que sai de 1 vai para 2e 4, conforme setas em azul, mas nao para 5. Essa suposicao nao e realıstica, mas sim-plifica a dinamica do modelo e podera ser modificada/aprimorada posteriormente usandoprincıpios fısicos.
Como unico controle sobre o fenomeno permitiremos que a forma seja rotacionadaθ(t) graus em torno de d, com 0 ≤ θ(t) ≤ θ0. Vale salientar que o volume de aguaque cada compartimento suporta depende de θ(t) e de α, esse volume e chamado devolume de suporte, VS(θ), e e igual para todos os compartimentos. O volume de agua nocompartimento i no instante de tempo t e dado pela funcao Vi(t).
Considerando que a agua sai do compartimento i, no instante t, se Vi(t) >VS(θ(t)) e a quantidade de agua que sai, Vi(t) − VS(θ(t)). Essa quantidade de agua e
2Departamento Academico de Matematica, UTFPR

distribuıda em duas direcoes, as direcoes indicadas pelas setas a e b na Figura 6.4.1. As-sumindo que a distribuicao depende do angulo θ(t), entao as direcoes a e b recebem,respectivamente,
a(θ(t))[Vi(t)− VS(θ(t))
]e b(θ(t))
[Vi(t)− VS(θ(t))
].
Assim, o seguinte conjunto de equacoes descreve a dinamica do fluxo de aguaentre os compartimentos:
dVi(t)
dt= (Ei(t)− Si(t)), para i = 1, ..., 6
onde Ei(t) e a quantidade de agua que entra no i-esimo cubo e Si(t) e a agua que sai dele.A quantidade de agua que e jogada fora da forma entre os tempos t0 e tf e
J(t) =
tf∫t0
(V3F (t) + V4F (t) + V5F (t) + V6F (t))dt
onde ViF (t) e a agua derramada fora do i-esimo compartimento no instante de tempo i.
Portanto, o problema de controle otimo e minθ(t),Vi(t)
J(t) sujeito a
dVi(t)
dt= Ei(t)− Si(t), para i = 1, ..., 6.
0 ≤θ(t) ≤ θ0
6.4.2. Conclusoes
Usando o metodo pseudo-espectral, discretizamos esse problema de controle otimo e, como Mathematica implementamos o modelo computacionalmente. O trabalho ainda nao estafinalizado e as proximas etapas consistem em achar a solucao otima para esse modelo paraposteriormente substituir as hipoteses simplificadoras por hipoteses realistas.
7. BOCOP - The Optimal Control SolverO Bocop e um programa open-source destinado a criar ferramentas para a resolucao deproblemas de controle otimo. Problemas de controle otimo sao aqueles que contam comsistemas dinamicos regidos por equacoes diferenciais.
Ele esta disponıvel para download gratuito no endereco bocop.org.
7.1. Informacoes Tecnicas
A interface do Bocop foi escrita em Qt (framework para desenvolvimento de interfacesgraficas). Seus arquivos principais sao escritos em C++, mas algumas funcoes de suportepodem ser escritas em C, e nao e necessario um bom conhecimento em programacaopara isso. O Bocop tambem utiliza o Ipopt, uma biblioteca de softwares para otimizacoesnao-lineares em larga escala.

7.2. Interface
Figura 11. Tela Principal
Figura 12. Barra de ferramentas
A interface do Bocop apresenta suas principais funcoes de maneira simples e direta, combotoes de atalho intuitivos na barra de ferramentas.
7.3. Definitions: Definindo o problema
Essa e a parte onde voce deve definir o problema de controle otimo que deseja implemen-tar, colocando as dimensoes e nomes das variaveis, as funcoes e as dinamicas utilizadas esuas restricoes.
Figura 13. Definition

7.3.1. Parameters and dimensions
Parametros e dimensoes:
Initial Time: Tempo de em que se inicia a situacao descrita no problema.
Final Time: Tempo final da situacao descrita no problema (deve-se colocar freecaso o tempo final e algo a ser descoberto).
State Variables Dimension: Numero de variaveis de estado no problema.
Control Variables Dimension: Numero de variaveis de controle no problema.
Algebric Variables Dimension: Numero de variaveis algebricas no problema.
Optimization Parameters Dimension: Numero de parametros utilizados no pro-blema.
Constants Dimension: Numero de constantes no problema.
Path Constraints Dimension: Numero de restricoes das variaveis de controle.
Initial and Final Conditions Dimension: Numero de condicoes iniciais e finais.
Solution File: Nome do arquivo que sera salvo como solucao do problema.
Iteration Output Frequency: Frequencia com que serao realizadas as iteracoesdo problema (colocar 0 caso nao queira delimitar uma frequencia).
Figura 14. Parameters and dimensions

7.3.2. Variables Names
Figura 15. Variables Names
Define os nomes de cada variavel.
7.3.3. Bounds
Figura 16. Bounds
Define os valores de cada variavel ou o valor maximo/mınimo que cada variavel podeatingir.

7.3.4. Constants Value
Figura 17. Constants Value
Define os valores das constantes indicadas na definicao.
7.4. Discretization: Metodos para a resolucao do problema
Figura 18. Discretization
Discretization e a parte onde voce escolhe o metodo para a resolucao do problema e onumero de passos a serem realizados, transformando o problema de controle otimo emum problema de programacao nao-linear.

7.5. Starting Point: Ponto inicial do metodo de resolucao
Figura 19. Starting Point
Essa e a parte onde voce define o ponto inicial para o problema de programacao nao-linear.
Figura 20. Starting Point
O Bocop oferece tres tipos de inicializacao para o problema:
Constant: Um valor constante no intervalo de tempo do problema [0,T].
Linear: Uma funcao definida em intervalos definidos pelo usuario.
Splines: Funcao definida em intervalos, porem com uma interpolacao de splines(curvas definidas por pontos de controle) nos intervalos.
7.6. Optimization: Opcoes de otimizacao
Define as opcoes de otimizacao para o problema de programacao nao-linear, como utilizarsolucoes previas como um ponto inicial ou utilizar o .sol de outro problema para iniciar aotimizacao de um novo.

Figura 21. Optimization
7.7. Build Problem e Launch Optimization
Figura 22. Barra de ferramentas
Essa e a parte onde voce deve compilar o problema. Ao clicar no botao “Build Pro-blem”(ıcone de martelo), o Bocop comecara a compilar o problema, e exibira uma men-sagem de confirmacao ou de erro, caso o problema tenha algo de errado. Apos com-pilar, voce deve clicar no botao “Launch optimization for the current problem”(ıconede seta verde) para rodar o programa, recebendo, apos alguns instantes, uma mensa-gem de confirmacao ou de erro. Apos isso, a solucao do problema estara pronta paraa visualizacao.
7.8. Visualization: Visualizacao do problema
Visualiza a solucao do problema, assim como o conteudo do arquivo de solucao geradoapos a otimizacao. A visualizacao inclui variaveis de estado, variaveis de controle e suasrestricoes.
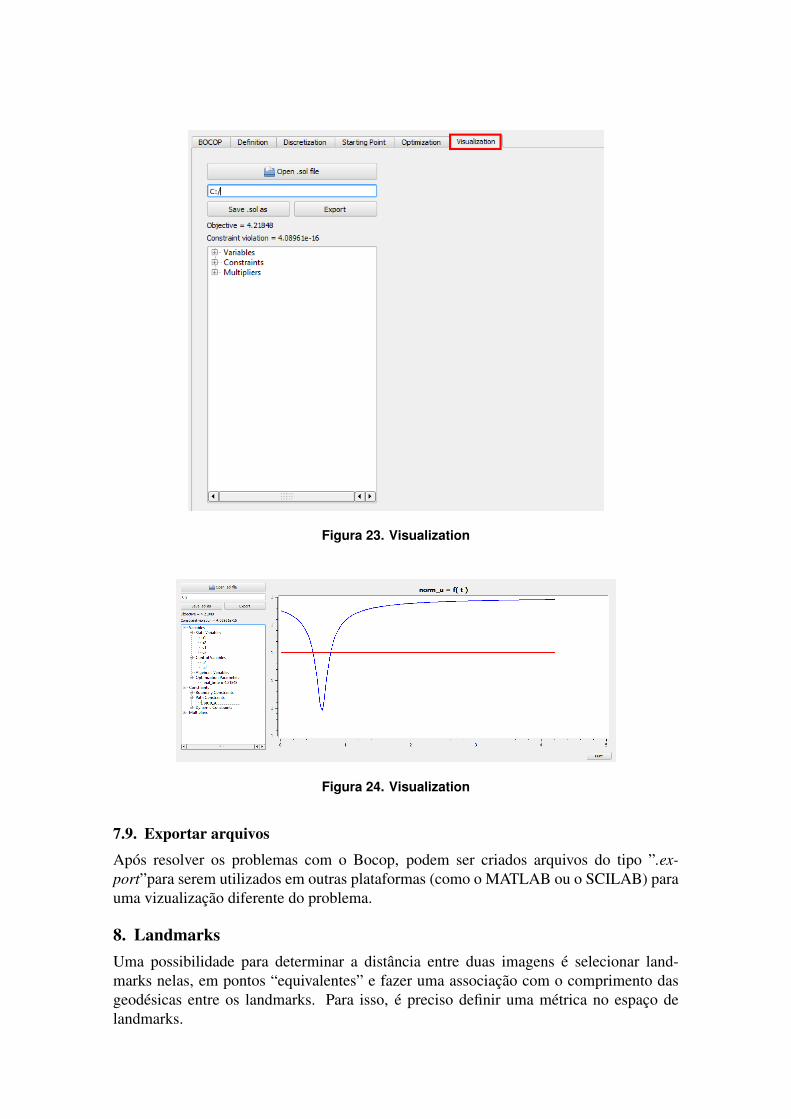
Figura 23. Visualization
Figura 24. Visualization
7.9. Exportar arquivos
Apos resolver os problemas com o Bocop, podem ser criados arquivos do tipo ”.ex-port”para serem utilizados em outras plataformas (como o MATLAB ou o SCILAB) parauma vizualizacao diferente do problema.
8. LandmarksUma possibilidade para determinar a distancia entre duas imagens e selecionar land-marks nelas, em pontos “equivalentes” e fazer uma associacao com o comprimento dasgeodesicas entre os landmarks. Para isso, e preciso definir uma metrica no espaco delandmarks.

8.1. Metrica
Uma metrica de Riemann numa variedade diferenciavel M e uma correspondencia queassocia a cada ponto p de M um produto interno, 〈, 〉p no espaco tangente TpM , que variadiferenciavelmente no seguinte sentido:
Num sistema de coordenadas em volta de p, com ~x = (x1, x2, . . . , xn) = ~q e∂∂xi
(~q) = d~xq(0, . . . , 1, . . . , 0) entao 〈 ∂∂xi
(~q), ∂∂xj
(~q)〉q = gij (x1, x2, . . . , xn) e uma funcaodiferenciavel.
A funcao gij e chamada de representacao local da metrica Riemanniana, ou o gijda metrica, no sistema de coordenadas.
A matriz G = (gij) e chamada de metrica e a matriz G−1 = (gij) e chamada decometrica. E importante notar que os elementos da cometrica nao necessariamente sao osinversos dos elementos da metrica, eles sao os elementos da matriz inversa da metrica.
Um exemplo e o Rn, com ∂∂xi
= ei = ~xq(0, . . . , 1, . . . , 0) com a metrica dada por〈ei, ej〉 = δij . Esse e o conhecido Espaco Euclidiano de Dimensao n e a geometria deRiemman nesse caso e a Geometria Euclidiana.
8.2. Espaco de Landmarks
DadoLn(Rd) =
{(q1, . . . , qn
), qj ∈ Rd, qi 6= qj para i 6= j
}E chamado de espaco de landmarks, consistindo de n landmarks distintos de di-
mensao d. O espaco Ln(Rd) e um subconjunto aberto de Rnd.
O vetor q de landmarks sera ordenado da seguinte maneira:
q =(q11, . . . , q1d, q21, . . . , q2d, . . . , qnd
)8.3. Metricas no espaco de landmarks
Para definir a metrica Riemmaniana no espaco de landmarks so e preciso conhecer aexpressao do Kernel K. Faz-se G−1 = (gij) = (K(qi, qj)) para determinar a cometrica,sua inversa e a metrica.
O kernel e uma funcao Rd ×Rd → Rd×d.
Alguns kernels comuns sao
• Kernel GaussianoK(x, y) = e−
|x−y|2
σ2 .Id×d
Tem um decaimento rapido, portanto landmarks influenciam muito pouco os dis-tantes.• Kernel de Camassa-Holm
K(x, y) = e−|x−y|σ .Id×d
Alguns fenomenos tem o “bico” (nao diferenciabilidade) no ponto 0, essa funcaoe mais adequada nesses casos.

• Kernel de CauchyK(x, y) =
1
1 + |x− y|2.Id×d
Seu decaimento e muito mais lento que o gaussiano, portanto a “area de in-fluencia” dos landmarks e muito maior.
Nas equacoes anteriores, |x− y| representa a distancia euclidiana entre os pontos.
As matrizes geradas pelos kernels mostrados aplicados a landmarks ordenadosda forma apresentada sao esparsas e tem a caracterıstica de ter todos os blocos fora dadiagonal principal nulos.
8.4. Geodesicas no Espaco de Landmarks
Foi implementado um caso simples, em que n = d = 2 utilizando o kernel de Cauchy epara resolucao numerica o software BOCOP.
O problema de controle otimo que representa a situacao nesse caso formulado daseguinte maneira: Dados os landmarks x1 e x2 com coordenadas x1x, x1y, x2x, x2y. Ovetor ordenado de controle e x = (x1x, x2x, x1y, x2y).
O funcional a ser minimizado e o de “custo” (C), pode ser interpretado como umamodificacao de energia cinetica, equivalentemente, trabalho.
C =1
2
∫ T
0
(g11u
2x1 + g22u
2x2 + 2g12ux1ux2
)dt
A dinamica do problema e dada por:x1x = u1
x2x = u2
x1y = u3
x2y = u4
Alem disso no software e criada uma outra variavel da dinamica, cuja derivada ea funcao intermediaria, ja que ele trabalha com a formulacao de Mayer.
A matriz da cometrica e dada por:
G−1 =
1 K 0 0K 1 0 00 0 1 K0 0 K 1
A matriz da metrica, inversa da anterior, e dada por:
G =(G−1
)−1=
1
1 +K2
1 −K 0 0−K 1 0 0
0 0 1 −K0 0 −K 1

Tambem:
K =1
1 + (x1x − x2x)2 + (x1y − x2y)2
Nas simulacoes, o tempo final T foi fixado como sendo 1 unidade de tempo.
8.4.1. Resultados das Simulacoes
Primeiramente, os landmarks foram x1(0) = (1, 1), x2(0) = (2, 2), x1(T ) = (2, 1) ex2(T ) = (1, 2), como pode ser visto na figura 25.
Figura 25. Ilustracao da primeira simulacao
Tambem a simulacao foi executada com x1(0) = (1, 1), x2(0) = (2, 5), x1(T ) =(2, 2) e x2(T ) = (3, 4), com os resultados sendo mostrados na figura 26.
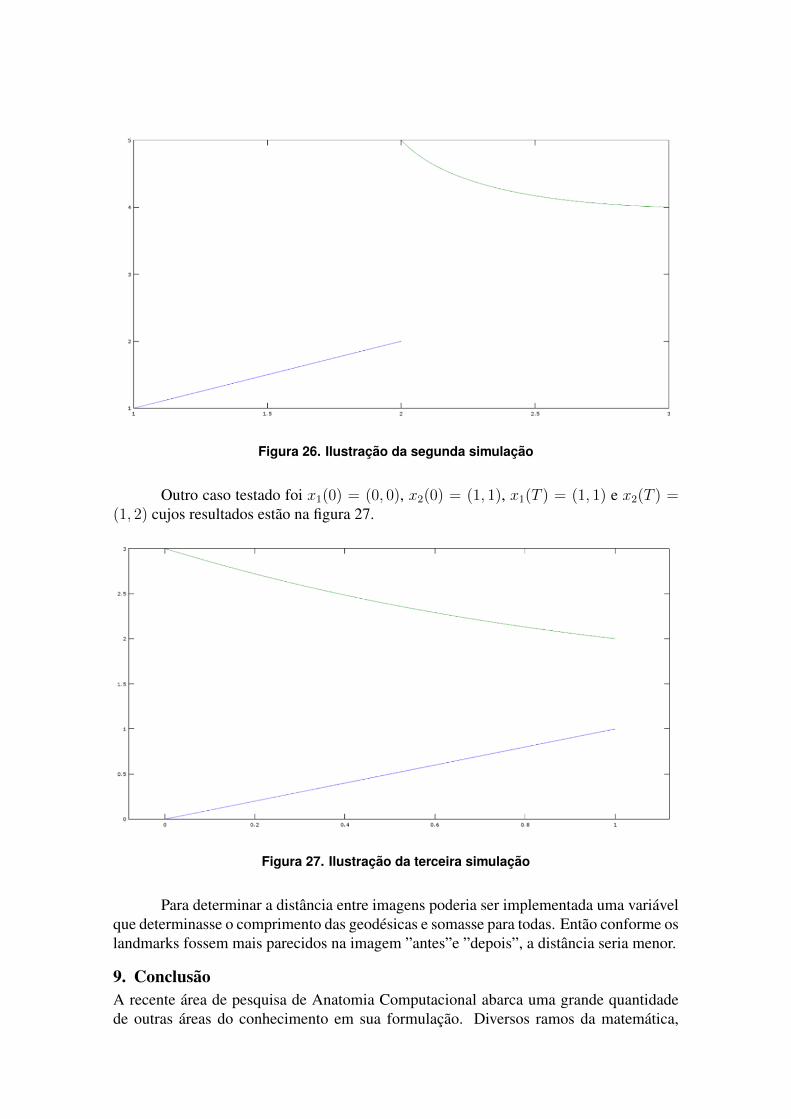
Figura 26. Ilustracao da segunda simulacao
Outro caso testado foi x1(0) = (0, 0), x2(0) = (1, 1), x1(T ) = (1, 1) e x2(T ) =(1, 2) cujos resultados estao na figura 27.
Figura 27. Ilustracao da terceira simulacao
Para determinar a distancia entre imagens poderia ser implementada uma variavelque determinasse o comprimento das geodesicas e somasse para todas. Entao conforme oslandmarks fossem mais parecidos na imagem ”antes”e ”depois”, a distancia seria menor.
9. ConclusaoA recente area de pesquisa de Anatomia Computacional abarca uma grande quantidadede outras areas do conhecimento em sua formulacao. Diversos ramos da matematica,

computacao, biologia, medicina e outras areas estao envolvidas.
Nesse texto foram abordados alguns aspectos matematicos essenciais para a com-preensao da Anatomia Computacional e simulacoes numericas de um caso simples.
Por ser uma area recente ha muitos problemas em aberto, como, por exemplo,determinar splines para landmarks em movimento. As ferramentas relacionadas com re-conhecimento de padroes tem diversas aplicacoes, como a selecao de espermatozoidespara inseminacao artificial, deteccao precoce de doencas, etc.
Alem do que foi discutido aqui, ha varios outros pontos de vista da AnatomiaComputacional. Matematicamente ha diversos aspectos da geometria diferencial, nacomputacao ha a realizacao dos conceitos, na biologia ha varias aplicacoes uteis e issoa torna um assunto interessante e importante a ser pesquisado.
Referencias[apg ] Aplicacao de gauss e a segunda forma fundamental.[bra a] Brachistochrone curve. https://en.wikipedia.org/wiki/Brachistochrone_curve. Acessado em: 20-02-2016.
[bra b] Pontryagin maximum principle. https://en.wikipedia.org/wiki/Pontryagin%27s_maximum_principle. Acessado em: 20-02-2016.
[Bernoulli 1696] Bernoulli, J. (1696). Acta Eruditorum.[Burke 1995] Burke, W. L. (1995). Div, Grad, Curl Are Dead.[do Carmo 1976] do Carmo, M. (1976). Geometria Diferencial de Curvas e Superfıcies.[Guido Gerig 2011] Guido Gerig, John H. Gilmore, W. L. (2011). Brain maturation of
newborns and infants.[J J O’Connor 2002] J J O’Connor, E. F. R. (2002). The brachistochrone problem.[Jain 2014] Jain, S. (2014). Research about image analysis and pattern classifica-
tion/recognition.[Lewis 2006] Lewis, A. D. (2006). The maximum principle of pontryagin in control and
in optimal control.[M. 1971] M., I. (1971). Mathematical optimization & Economic theory.[Mahajan 2010] Mahajan, S. (2010). Street-Fighting Mathematics.[Mendes ] Mendes, E. M. A. M. Introducao ao controle em espaco de estados - ideias
basicas do controle Otimo.[Michael I. Miller 2015] Michael I. Miller, Alain Trouv, L. Y. (2015). Hamiltonian sys-
tems and optimal control in computational anatomy: 100 years since d’arcy thompson.[Miller 2004] Miller, M. I. (2004). Computational anatomy: shape, growth, and atrophy
comparison via diffeomorphisms.[Mumford 2002] Mumford, D. (2002). Pattern theory: The mathematics of perception.[Nunes 2010] Nunes, B. (2010). Geometria diferencial de superfıcies e o teorema de
gauss-bonet.[Pacheco 2008] Pacheco, M. (2008). Curvas especiais em superfıcies regulares.[Thompson 1992] Thompson, D. W. (1992). On growth and form.[Weisstein ] Weisstein, E. W. Brachistochrone problem. http://mathworld.wolfram.com/BrachistochroneProblem.html. Acessado em: 20-02-2016.
























![s [S]ao uSSuei [S]ao uSSuei [Z]ao u Suei [Z]ao u Suei Mots Phrases](https://img.pdfslide.tips/doc/110x75/551d9da2497959293b8d244e/s-sao-ussuei-sao-ussuei-zao-u-suei-zao-u-suei-mots-phrases.jpg)




