Embed Size (px)
Citation preview

UNIVERZA V LJUBLJANI PEDAGOŠKA FAKULTETA
FAKULTETA ZA MATEMATIKO IN FIZIKO Program: fizika in tehnika
ANIMACIJE DELOVANJA ELEKTROMOTORJEV IN
ROBOTSKIH ROK
DIPLOMSKO DELO
Mentor: Kandidat: dr. Slavko Kocijančič, izr. prof. Andrej Križaj
Ljubljana, februar, 2008


Zahvala
Zahvaljujem se dr. Slavku Kocijančiču za znanje, ki sem ga pridobil z njegovo pomočjo, za
vse nasvete, predvsem pa za prilagodljivost pri izdelavi diplomske naloge. Zahvaljujem se
tudi svojim staršem, ki so mi omogočili študij, Jani, ki mi je vseskozi stala ob strani in vsem
najbližjim, za vse spodbudne besede.

Povzetek
Diplomsko delo je namenjeno vsakemu začetniku na področju risanja 3D animacij.
Predstavlja uporabo programskega orodja 3D Studio Max (3DSM) in hkrati bralcu prikazuje
zgodbo nastajanja 3D računalniške animacije. Delo lahko služi pri povezovanju teoretičnih
osnov elektromotorjev in robotskih rok s praktičnimi primeri. Statična 2D in dinamična 2D
slika, ki se pojavljajo v učbenikih in preprostih 2D animacijah, ki jih najdemo na spletu, ne
predstavlja zadostne podpore za jasno razumevanje. Poznavanje treh do šestih prostorskih
stopenj in zapletenih 3D gibanj pa predstavlja za učenca izziv, ki mu velja nameniti
pozornost.
V prvem delu se bralec na splošno spozna z računalniško animacijo in uporabo pri pouku
izbirnega predmeta elektrotehnike in robotike. Učni načrt vsebuje primere, ki jih lahko
predstavimo tudi z računalniško animacijo. Zagotovo predstavitev 3D animacije, osnovnega
delovanja elektromotorja in robotske roke, tudi zaradi svoje podobnosti z računalniško igro
pritegne pozornost učencev. S tem lahko povečamo zanimanje učencev za obravnavanje teh
vsebin in za delo z računalniki. Sledi opis izbranih orodij, s katerimi lahko narišemo 3D
animacije in uporaba simulacij na svetovnem spletu. K odločitvi za programsko okolje 3DSM
je v veliki meri prispevalo dejstvo, da je program možno poskusno uporabljati tri mesece, s
široko dostopno dokumentacijo in veliko narejenih primerov na svetovnem spletu.
V drugem delu je opisan potek izdelave preprostega generatorja enosmerne napetosti. Bralec
se seznani z možnostmi, ki jih ponuja omenjeni program in nastavitvami, pri izdelavi 3D
modelov. Sledi povezovanje elementov in definicija gibanj posameznih elementov med
animacijo. Izdelane animacije lahko nato še dodatno obdelujemo s posebnimi programi, kot je
recimo uporabljeni Adobe Premier Pro in jih poljubno združujemo v logično celoto. Sledi
prikaz izdelave modela robotskih rok z osnovnimi smermi gibanj, poljubnim gibom vrha roke
in prikazom uporabe zapestja.
V zadnjih dveh poglavjih so prikazane animacije preprostih elektromotorjev in osnovnih
modelov robotskih rok z osnovnimi gibi in prikazom uporabe.
Zaključek prikaže omejitve in prednosti uporabe orodja za izdelavo 3D animacij, možne
razširitve uporabe in uporabnost animacij pri pouku.
Ključne besede:
Animacija, elektrotehnika, robotika, elektromotorji, generatorji, robotske roke, tehniško
izobraževanje, 3D Studio Max, Adobe Premiere Pro.

ANIMATION OF ELECTROMOTORS AND ROBOTIC ARMS
Abstract
The diploma work is designed for everyone who is starting to work with 3D animation
technics. It presents use of 3DSM and in the same time describes how to produce 3D
animation. The software can be used to show relationship between theory of electromotors or
robotic arms and their practical case. Static 2D and dynamic 2D picture that are preseneted in
student books or internet do not clarify the basic principle sufficently. Understanding of
motion in three or six directions presents a chalenge for pupile, that needs to be claryfied.
In first chapter term computer animation is clearified and how to use it in some optional
subjects in primary and high schools. There are some examples in school curiculum that can
be presented also with computer animation. 3D animation of basic functionality of
electromotors and robotic hands is very interesting in primary and high school mostly because
of similarity with computer game and it would be a shame if we would not use this in
teaching. With that in mind we can motivate pupile or students to work with those subjects.
Short description of software for 3D animation and use of it on internet is also included in this
chapter. 3DSM was selected mostly because of the fact that trial version can be downloaded
and documentation can be found easiliy on internet.
Second part describes the creation of animation of DC generator, with basic steps. Reader
sees the posibilities of 3DSM and how to define parameters of used models. In the next step
link beetwen models is created and definition of motion during animation is defined. Software
Adobe Premiere Pro is used for joining different animations together. After that the same
approach is selected to show creation of animated robotic arm.
The last two chapters show all created animation of basic electromotors and simple robotic
arms, with short description how they were made.
Consclusion presents pros and cons for use of 3DSM and use of 3D animation in primary and
high school. It also describes possible development in the future mostly with VRML/X3D.
Key words:
Animation, electrotechnic, robotics, electric motor, generator, robotic arm, technical
education, 3D Studio Max, Adobe Premiere Pro.

Kazalo
1 Uvod ...................................................................................................................................1
2 Računalniška animacija ......................................................................................................3
2.1 Animacija pri pouku elektrotehnike in robotike.........................................................4
2.2 Izbira programskega orodja .......................................................................................6
2.3 3DSM in simulacija na spletu.....................................................................................8
3 Izdelava 3D animacije ......................................................................................................10
3.1 Animacija enosmernega generatorja s programom 3DSM......................................10
3.1.1 Izdelava generatorja..........................................................................................12
3.1.2 Izdelava grafa ...................................................................................................24
3.1.3 Izdelava legende ...............................................................................................29
3.1.4 Spojitev filmskih datotek z Adobe Premiere Pro .............................................30
3.2 Animacije robotske roke s 3DSM ............................................................................32
4 Motorji in generatorji .......................................................................................................42
4.1 Nastanek izmenične in enosmerne napetosti ...........................................................43
4.2 Generator enosmerne napetosti ................................................................................45
4.3 Generator enosmerne napetosti z dvema zankama...................................................46
4.4 Generator izmenične napetosti .................................................................................47
4.5 Nastanek trifazne napetosti.......................................................................................49
4.6 Trifazni sinhronski generator....................................................................................50
4.7 Sklop trifaznega generatorja in motorja ...................................................................52
4.8 Prikaz kratkostične kletke v trifaznem asinhronskem elektromotorju .....................53
5 Robotske roke ...................................................................................................................56
5.1 Kartezična robotska roka ..........................................................................................57
5.2 Cilindrična robotska roka .........................................................................................58
5.3 Polarna robotska roka ...............................................................................................60
5.4 SCARA robotska roka..............................................................................................61
5.5 Členasta robotska roka .............................................................................................63
6 Zaključek ..........................................................................................................................65
7 Literatura ..........................................................................................................................66
8 Priloge...............................................................................................................................68
Priloga 1: Časovna spremenljivost puščic na zanki in puščic na priključkih kolektorja......68


A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
1
1 Uvod
Leta 1887 je Nikola Tesla izumil sinhronski motor, pri katerem vrtljiv magnet sledi
vrtenju magnetnega polja v navitju, skozi katerega tečejo tokovi posameznih faz trifaznega
toka. Asinhronski - indukcijski motor je bil tisti izum, ki je omogočil široko uporabo
izmenične energije. Ta motor temelji na indukciji, in sicer ima kovinski vodnik, v katerem se
zaradi vrtljivega magnetnega polja inducira napetost in steče tok, ki povzroči vrtenje. Tako je
z izumom večfaznega motorja, ki je zavladal svetu. Od srede oktobra 1887 do druge polovice
leta 1888 je z neutrudnim delom prijavil devet glavnih patentov o svojem večfaznem sistemu
z ustreznim motorjem in generatorji. Od takrat naprej se elektromotorji izboljšujejo, vendar
osnovni princip delovanja ostaja isti. Uporabljamo jih za pogon najrazličnejših strojev in
naprav v skoraj vseh vejah industrije. Med seboj se ločijo po namenu uporabe, izkoristku,
delovni moči, velikosti itd. Zaradi svoje razširjenosti se jih obravnava tudi pri pouku v
osnovni šoli. Omenimo jih pri pouku fizike, bolj podrobno pa pogledamo pri izbirnem
predmetu elektrotehnike. Kljub temu, da lahko preverjamo delovanje posameznih
elektromotorjev in da lahko pregledamo osnovne sestavne dele, princip delovanja pa je
preprost, ostaja samo delovanje velikokrat težko razumljivo. Tu si lahko pomagamo z
računalniško animacijo, ki prikazuje osnovne principe delovanje na način, ki je bolj domač
dejanskemu poskusu. Podobno, kot uporabimo motor za pogon strojev v industriji ali za
pogon majhnih gospodinjskih aparatov, lahko motor uporabimo tudi za krmiljenje robotov
[1].
Besedo robot prvič srečamo v 20. stoletju. Češki pisatelj Karel Čapek je leta 1920
vpeljal besedo robot. S tem je poimenoval majhne, človeku podobne stroje v svojem
literarnem delu Rosum Universal Robots. Danes beseda robot pomeni nekaj drugega. Je
namreč stroj, ki ga sestavljajo mehanski del in računalniški del [2]. Robotika je
interdisciplinarna znanost, ki povezuje mehaniko, elektroniko, informatiko in avtomatiko. V
zadnjih desetletjih se je utrdila v številnih industrijskih procesih kot nepogrešljiv del moderne,
ekonomične in človeku prijazne tehnologije. Brez robotskih rok si ne znamo več predstavljati
vstavljanja obdelovancev v stiskalnice, varjenja avtomobilskih ohišij, razpršilnega barvanja
itd. Ne presenečajo nas servisni mobilni roboti, ki bodo kmalu čistili naša stanovanja, ali
kirurški roboti. Pomen robotike v svetu zelo hitro narašča. Področja uporabe robotike se vse
bolj širijo, kar nam dokazuje rast povpraševanja po robotih. Na začetku je bilo kar tri četrtine
robotov uporabljenih v avtomobilski industriji. Sedaj pa jih srečamo tudi v drugih
industrijskih področjih kot so elektronika, farmacija, bela tehnika in ne nazadnje tudi za

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
2
pridelavo in predalavo hrane in pijače. Število robotov nezadržno raste tudi v Sloveniji.
Robotov nimamo le v avtomobilski industriji, ampak vse več v izdelčni in kosovni
proizvodnji. Srečamo jih povsod, kjer se zahteva visoka kakovost izdelkov, kjer so opravila
škodljiva zdravju ali pa imamo opravka z monotonim delom. Robote v svoje delavnice
uvajajo tudi uspešni obrtniki. Danes se robotika pojavi že v osnovnih šolah, kjer pri izbirnem
predmetu robotika v tehniki učenci pridobijo osnovna znanja o geometriji in konstrukciji
osnovnih oblik robotskih rok. Seznanijo se z različnimi področji, kjer ima robotika
pomembno vlogo. Pri pridobivanju praktičnih izkušenj pa si lahko pomagajo tudi z uporabo
računalniških animacij. Te so primerne tudi za uporabo v tehničnih srednjih šolah.
Uporaba računalniških animacij vse bolj postaja vsakdan. Pred nekaj leti je računalnik
služil za krmiljene osnovnih naprav in obdelavo različnih podatkov, danes pa je njegova
uporaba močno razširjena in jih uporabljamo tudi za upodobitev zahtevnih 3D animacij.
Strojna oprema osebnih računalnikov je toliko napredovala, da lahko z nekaj omejitvami,
praktično vsak uporabnik osebnega računalnika nemoteno dela z računalniško animacijo.
Vsak, ki ima za sabo nekaj izkušenj s programskimi orodji lahko naredi preprosto animacijo.
Veliko objektov, ki so potrebni za izdelavo je že vključenih v program, kar nam močno olajša
izdelavo. Animacija se izkaže za zelo priročen način prikazovanja poskusov, ki jih izvajamo
in omogoča dodajanje novih elementov, ki bi razjasnili predstavo. Tako bi lahko določen
poskus posneli in nato filmski zapis uvozili v 3D program za izdelavo animacij in dodali
veličine (ki se gibljejo skladno z poskusom) ali opise posameznih elementov. Možnosti
uporabe so velike posebej tam kjer praktičnih prikazov ne moremo izvajati ali pa jih zaradi
narave pojava ne moremo preprosto predstaviti.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
3
2 Računalniška animacija
Animacija v latinščini pomeni obuditi v življenje. S hitrim prikazovanjem sličic
dosežemo iluzijo gibanja. Vsaka sličica je nekoliko drugačna od prehodnje in običajno
posnamemo med 12 (risane animacije) in 24 (filmske animacije) sličic na sekundo. Pri taki
hitrosti menjavanja človeško oko ne zazna več posameznih slik. Poznamo več tipov animacij.
Glavne so risba na celuloidni foliji, animacija lutk in predmetov ter računalniške animacije.
Izdelavo računalniške animacije omogočajo programi, ki se med seboj razlikujejo glede na
način izrisa. Ti se delijo na programe za delo z bitnimi (rastrskimi1) slikami in programe za
delo z vektorskimi slikami. Obdelava bitne slike zajema transformacije skaliranja, zasuka in
zrcaljanja, uravnavanje svetlosti, kontrasta, barvnih odtenkov, nasičenosti, inverzijo slike...
Osnovni gradniki so točke (pixels), ki jih postavimo v mrežo in tako pridemo do bitne slike.
Pri povečevanju slike se večajo osnovni gradniki – kvadratki kar pomeni slabšo kvaliteto
slike. Vektorska grafika pa opiše narisane objekte z matematičnim izrazom. Osnovni gradniki
so preprosti liki kot so daljica, lok, krog in objekti kot so kvader in krogla. Bolj zapletene
objekte program izračuna z matematičnim operacijami. Največja prednost vektorske grafike
je, da jo lahko poljubno povečujemo ali zmanjšujemo in pri tem ne izgubimo kvalitete slike
[3].
Računalniško animacijo delimo na dvodimenzionalne in tridimenzionalne tehnike
izdelave in prikaza. Pri 2D animaciji ne rišemo vsake sličice posebej, temveč nam pri tem
pomaga programska oprema, ki z interpolacijo ustvari vmesne sličice. Določimo začetno in
končno točko animacije ter damo računalniku ukaz v kolikšnem času, na kakšen način in po
kakšni poti naj premakne željeni objekt od ene točke do druge. 2D animacije zadovoljivo
opisujejo potek dogajanja vendar ne podaja prostorske predstave poteka. Pri 3D računalniški
animaciji pa ustvarjamo v virtualnem 3D prostoru. Orientiramo se s prostorskimi
koordinatami x, y in z. Narisane objekte primerno zmodeliramo in orientiramo ter nato
določimo pozicije v animaciji za vsak objekt posebaj. V 3D animaciji nismo omejeni s
pogledom, saj lahko navidezno kamero poljubno premikamo po prostoru in tako omogočimo
prostorsko predstavo. Dogajanje v animaciji lahko kadarkoli za hip ustavimo ali upočasnimo,
spreminjamo kot pogleda iz katerega so razmere najbolj pregledne [4]. Glede na starost
učencev lahko uporabimo bolj ali manj zapletene animacije. Glavni cilj teh je, da učencem
1 Izraz je povezan s tehnologijo katodnih cevi (CRT – Cathode Ray Tube) in se nanaša na vzorce, ki jh je naprava naredila pri prikazu slike.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
4
predstavi bistvo glede na njihovo razvojno stopnjo za razumevanje snovi. Kadar uporabimo
animacijo, ki vsebuje preveč podrobnosti, obstaja nevarnost, da ta cilj zameglimo.
Računalniške animacije lahko uporabljamo pri pouku na fakultetah, srednjih šolah in
osnovnih šolah. Poleg uporabe običajnih učnih pripomočkov lahko z animiranim prikazom
popestrimo učno uro. Kadar prikazujemo animacijo manjši skupini do šestih učencev
potrebujemo le računalnik s primernim programskim orodjem in dovolj velikim zaslonom. Za
večje skupine pa je bolj primerna uporaba projektorja. Ta mora poskrbeti za dovolj kontrastno
sliko, ki zadovoljivo prikaže animacijo tudi v svetli učilnici. Učitelj mora v vsakem primeru
narediti primeren uvod v razlago s pomočjo animacije. Opozoriti mora učence na kaj naj bodo
pozorni in po potrebi animacijo med predvajanjem ustavlja na točkah, ki so najpomembnejše
za razumevanje. Po potrebi animacijo zavrtimo večkrat. Problem nastane pri učencih v
osnovni šoli, saj imajo zelo velike težave s prostorsko predstavo. Razvojna stopnja vsakega
posameznika se za odtenek razlikuje in imajo eni večje, drugi manjše težave. Temu se
moramo prilagoditi in spremljati vsakega učenca posebej. Pomoč nudimo zlasti tistim, ki
imajo težave, saj je razvijanje prostorske predstavljivosti učencev pomembno za nadaljevanje
intelektualnega razvoja, zato jo moramo načrtno razvijati [5], [6].
2.1 Animacija pri pouku elektrotehnike in robotike
Učenci v okviru fizike in elektrotehnike spoznajo osnovno delovanje elektromotorjev.
Operativni cilj, ki ga skušamo doseči je, da določijo magnetne sile med trajnimi magneti ter
trajnim magnetom in železom. Pri tem raziskujejo delovanje trajnih magnetov in izdelajo
elektromagnet, kjer z magnetnico določijo magnetna pola. Ugotovijo, da tuljava nastopa kot
vir magnetnega polja. Prav tako pridejo do spoznanja, da železno jedro vpliva na jakost
magnetnega polja. Z razstavljanjem enosmernega elektromotorja jim postane jasno, kakšno
vlogo imajo posamezni sestavni deli. Na spodnji sliki (Slika 2.1) vidimo ohišje (1), rotor (2),
in komutator (3). Na drugi sliki (Slika 2.2) vidimo podrobnejši prikaz rotorja, ki je sestavljen
iz navitja (1), kotve (2), priključka (3), ki povezuje navitje s komutatorjem (4), in izolacije
(5). Ugotovijo, da je magnetna sila osnova za delovanje elektromotorjev. Z modelom
kolektorskega motorja, ki ga sami sestavijo, morajo znati opisati njegovo zgradbo in
delovanje [7].

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
5
Slika 2.1: Sestava preprostega elektromotorja. Slika 2.2: Sestava rotorja.
Pri eksperimentiranju z gibajočimi magneti v tuljavi, kjer merijo inducirani tok se
seznanijo z magnetno indukcijo. Učencem razdelimo kolesarski dinamo in jim damo nalogo,
da razložijo njegovo delovanje. Tako otroci razstavijo dinamo in odkrijejo rotor. Tega
preučijo z magnetnico. Pri poročanju razložijo, da je napetost generatorjev inducirana
napetost, ki jo povzroči rotor. Ko je vsem to jasno, sestavijo še model preprostega
električnega generatorja in ga preizkusijo. Tako se naučijo princip delovanja električnih
generatorjev. Učence motiviramo s prikazom animacij enosmernega generatorja. Nato učenci
sami preverijo delovanje motorja v vlogi generatorja in obratno. Ker je predstava sil in
magnetnih silnic pri sestavljenem modelu lahko nekoliko otežena, predstavlja animacija dobro
oporo za povezovanje med magnetnim poljem, ki ni viden, in zanko, ki se giblje [7].
Pri izbirnem predmetu robotika v tehniki učenci med drugim spoznajo temeljne
značilnosti računalniško krmiljenih strojev in naprav in opredelijo značilnosti robota. Otroke
pobližje spoznamo s to temo, če si ogledajo demonstracije2 računalniško krmiljenih modelov
strojev in naprav, opazujejo in uporabijo računalniške simulacije robotske roke in obiščejo
delavnico ali tovarno z računalniško vodeno proizvodnjo. Ogledamo si lahko tudi didaktični
film o robotiki in pokažemo računalniško animacijo robotskih rok, kjer spoznajo osnove
arhitekture robotske roke (Slika 2.3) in zapestja (Slika 2.4) [8]. Primer filma robotske roke se
nahaja na priloženi zgoščenki v mapi \Film.
2 Glej prilogo na priloženi zgoščenki.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
6
Slika 2.3: Primer robotske roke. Slika 2.4: Primer zapestja in prijemala robotske
roke.
To jim olajša načrtovanje različnih konstrukcij, ki omogočajo gibanje v treh dimenzijah.
Pripeljemo jih do spoznanja, da je za različne naloge robota poleg roke potrebno še zapestje,
ki ima posebno vlogo. Ugotovijo, da zapestje omogoča orientacijo telesa v prostoru. Še enkrat
jim pokažemo animacijo robotskih rok, le da so tokrat pozorni le na zapestje. Pustimo učence,
da prihajajo na dan z različnimi idejami o uporabi robotskih rok in s tem spodbujamo njihovo
domišljijo. Tako dobimo več različnih idej za sestavo računalniško krmiljenih modelov [8].
2.2 Izbira programskega orodja
Za izdelavo 3D objektov rabimo primerno programsko okolje. Na tržišču se najde
mnogo programov, ki so vsi po vrsti dobri, zato je izbira težka. Vsi programi zahtevajo
približno 3 mesece, da jih osvojimo in tako začnemo z resnim raziskovanjem njihovih
zmožnosti. Kot pri večini orodji je tudi tukaj v veliki meri odvisno koliko zna uporabnik
izkoristiti prednosti posameznih orodji, predvsem pa moramo poznati kje in kako se bodo
narejeni produkti uporabljali. 3D grafika sodi med bolj zahtevno oblikovanje, ki vzame
ogromno časa, saj moramo določiti vse parametre prostora in objekta. Sistem dela je v vseh
približno enak, kljub temu da se posamezni ukazi imenujejo drugače. V večini primerov
programi podpirajo razširljivost z različnimi plačljivimi ali neplačljivimi dodatki. V uporabi
pa so tudi razni skripti jeziki s pomočjo katerih lahko izdelamo tudi svoje objekte, ki jih lažje
opišemo z matematičnimi enačbami. Izkaže se, da je najbolj pomembna stabilnost,
zanesljivost in hitrost rendiranja. Slednje pri majhnih slikah ali animacijah ni problem, vendar
pa se pri bolj zahtevnih animacijah izkaže za problematično. Velika podjetja to rešujejo z
A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
7
povezavo več sto računalnikov pri osebni izdelavi pa te možnosti nimamo, zato velja
opozorilo. Parametrov za hitro in kvaliteno primerjavo je preveliko, zato sem opisal samo
najbolj osnovne in trenutno najbolj razširjene. Nekateri izmed njih, kot recimo Wings 3D
[19], Art of Illusion [20], Blender [21], Anim8or [22], AutoQ3D [23] so brezplačni, za vse pa
je dobro pogledati razne primerjalne tabele. Na kratko bom opisal programe, ki sem jih vzel
pod drobnogled za izdelavo animacij, vendar je še veliko ostalih orodij, ki so boljši ali slabši
in bi bilo krivično podajati ocene za vsakega izmed njih, saj se določeni razlikujejo res samo v
podrobnostih. Velja izpostaviti najbolj razširjene kot so recimo Lightwave 3D [24], Cinema
4D [25], Maya [27] in Softimage XSI [26], [9], [10].
MAYA
Podpira različne operacijske sisteme, kot so OS Windows, Linux in MAC OS.
Podpora programskega jezika C in C++ nam omogoča izdelavo lastnih funkcij, ki so
enakovredne že obstoječim. Je najbolj uporabljen program, z zelo dobro podporo, vendar žal
veliko ceno in dolgo dobo učenja saj ima precej zapleten uporabniški vmesnik. Zaradi svojih
širokih možnosti zahteva dobro strojno opremo. Program je prišel pod isto lastništvo kot
3DSM, zato lahko pričakujemo večjo kompatibilnost med orodjama [10].
BLENDER
Za razliko od ostalih ima ta najširšo podporo različnim operacijskim sistemom, kot so
MS Windows, MAC OS X, Linux, IRIX, Solaris, FreeBSD. V veliki meri podpira funkcije, ki
jih imata 3DSM in MAYA, žal pa nima tako dobre dokumentacije, ki bi nam omogočala
dobro in predvsem hitro delo. Program je brezplačen. Podpira programiranje v jeziku C.
Nekoliko zaostaja pri končni kvaliteti animacij in ima težaven uporabniški vmesnik.
Predvsem slednjemu gre glavni razlog za počasno širitev programa. Po nekaterih ocenah pa je
problem tudi nestabilnost v Windows okolju [10].
3DSM
Najširše uporabljen program za izdelavo 3D animacij s široko paleto dodatkov. Zaradi
velike podpore ni problemov z različno dokumentacijo. Velika prednost programa je podpora
različnim uvoznim in izvoznim formatom. Podpira risbe, ki jih narišemo v AutoCAD-u saj

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
8
podpira tudi format DWG. Za razliko od ostalih dveh ne podpira programskega jezika C in
C++, vendar nam omogoča izdelavo funkcij z jezikom 3DSMaxScript. Primeren je za začetek
in uvajanje v resne programe kot Maya ali Lightwave 3D. Predvsem sta bila glaven razlog za
odločitev široko dostopna dokumentacija in prijazen uporabniški vmesnik [10].
2.3 3DSM in simulacija na spletu
Zagotovo obstaja želja, da bi prikazovali različne 3D simulacije na svetovnem spletu. To
je do določene mere izvedljivo z računalniškim jezikom VRML3, ki ga podpira tudi 3DSM.
VRML opisuje 3D objekte v svetovnem spletu z uporabo protokola HTML in istočasno
omogoča interakcijo uporabnika z objekti. Podpira XML4 standard, kar pomeni lahko uporabo
v različnih operacijskih sistemih in različnih spletnih pregledovalnikih. VRML se nadomešča
z X3D5 standardom, ki še bolj razširi uporabnost in integracijo s programi za izdelavo 3D
modelov. Kljub temu, da 3DSM omogoča izvoz v VRML/X3D, še ne omogoča željenih
manipulacij s 3D okoljem. Z uporabo določenih t.i. dodatnih6 (plug-in) programov za spletne
pregledovalnike lahko omogočimo prikaz objektov na spletu, omogočimo preprosto kontrolo
okolja, kot so recimo povečanje slike in preprosto »sprehajanje« po prostoru. V primeru
velikih in zapletenih 3D objektov je to dobrodošlo, saj prikažejo podrobnosti. Pri uporabi
animacij pri pouku pa moramo biti vestni pri izbiri števila objektov in podrobnosti, ki jih
bomo uporabili, zato je taka funkcionalnost dobrodošla, ne pa nujno potrebna. Potrebovali bi
lahko določljive parametre, ki nastopajo v 3D animacijah in bi omogočili različne interakcije
kot so rotiranje, povečanje, in premikanje posameznih objektov. To pomeni, da bi znotraj
prikazovalnika za VRML standard potrebovali delovno okno, ki bi mirovalo glede na prikaz
in bi omogočilo nastavljanje parametrov. Zaradi didaktične preglednosti bi morali določeni
deli tako ustvarjene 3D slike ali animacije, kot so recimo razni grafi in legende, mirovati
glede na okolje in se istočasno spreminjati, kjer pa naletimo na pravila, ki jih narekujejo
programi za risanje 3D objektov. Pri 3DSM naletimo na oviro kamer, ki ne more zajemati
izrisnih pogledov v katerih dobimo neprostorski pogled objekta. Prav tako naletimo na oviro
z definicijo časovnega poteka animacije, saj mora po določitvi parametrov slike ali animacije
3 Virtual Reality Modeling Language 4 Extensible Markup Language je preprost računalniški jezik podoben računalniškem jeziku HTML in omogoča zapis za opisovanje strukturiranih podatkov. Oblikovan je bil s ciljem združevanja z različnimi operacijskimi sistemi. 5 Extensible 3D 6 Dodatki, ki niso v osnovnih verzijah programov in omogočajo opravljanje specifičnih nalog.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
9
dogajanje potekati naprej. Sicer določeni prikazovalniki omogočajo definicijo preprostih
parametrov, vendar je polna integracija še v dosegu prihodnosti. Svetlo točko predstavlja
recimo kombinacija 3DSM in Java3D7, ki omogoča različne interakcije s 3D sliko, vendar je
določanje parametrov, tudi zaradi omejitev 3DSM-a, zaenkrat prezapletena za uporabo. Na
tem mestu se zato raje odločimo za izdelavo animacije, ki se bo zaradi podpore standardom
lažje nadgradila v simulacijo, ko bo to mogoče.
7 3D programsko okolje, ki deluje na osnovi objektnega jezika Java, za katerega je znana široka podpora v spletnih brskalnikih in omogoča izvajanje programov kot del HTML dokumenta.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
10
3 Izdelava 3D animacije
Dejstvo je, da moramo za željen didaktični učinek prikazati več različnih pogledov istega
objekta in istočasno odvisnost količin, ki nastopajo v animaciji. To posebej pride v poštev pri
izdelavi animacije motorjev. 3DSM pri izdelavi animacij omogoča posnetek samo enega
pogleda. Ker je končna želja izdelati avi zapis in istočasno uporabiti več pogledov, se
odločimo, da naredimo animacijo v dveh korakih. V prvem izrišemo posamezne modele, jim
določimo karakteristike prikaza in pravila gibanja. V drugem pa izvedemo spojitev različnih
animacij v eno. Programov za to je veliko, na tem mestu pa bomo uporabili Adobe Premiere
Pro [28]. Adobe Premier Pro se izkaže, kot zelo močno orodje, v katerem je veliko možnosti
nadaljne uporabe s široko podprto dokumentacijo. V primeru izdelave robotskih rok se bodo
prikazovali samo gibi robotske roke, zato spojitev animacij ne bomo izvajali [17], [18].
V prikazu izdelave niso razloženi vsi ukazi, pač pa je prikazan samo postopek izdelave
z opornimi točkami. Za razlago posameznih ukazov je potrebno gledati priročnike osnovnih
ukazov za 3DSM. Pri risanju v 3D se izkaže, da je vedno več poti do cilja, čeprav so lahko
ukazi, ki jih uporabljamo isti, zato je bolj pomebno opisati zgodbo, ki prikazuje kako so
modeli nastali, kot pa ukaze same.
3.1 Animacija enosmernega generatorja s programom 3DSM
Po zagonu programa se nam prikaže delovno okolje (Slika 3.1). Osrednje delovno
okolje je predstavljeno z štirimi osnovnimi pogledi Top, Front, Left in Perspective.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
11
Slika 3.1: Osrednje delovno okolje.
V zgornji orodni vrstici se nahajajo najbolj osnovni ukazi za manipuliranje delovnega
prostora in narisanih elementov. Tu najdemo bližnjice za definicijo risalnih ravnin, izbor
materialov in različnih dodatnih delovnih oken.
Za risanje elementov uporabimo Command Panel, ki se nahaja na desni strani
delovnega okolja in je razdeljen na različne zavihke. Zavihek Create omogoča risanje 2D, 3D
objektov, dodajanje različnih vrst luči, kamer, pomožnih objektov za risanje in definicijo
lastnosti prostora, kjer se elementi nahajajo. Zavihek Modify uporabljamo za spreminjanje
lastnosti narisanih elementov. Isti element ima lahko različne lastnosti, ki se spreminjajo
glede na to kakšen način izrisa uporabimo8. Tretji zavihek Hierarchy definira način, kako se
bodo osnovni ukazi9 upoštevali in dedovali pri povezanih objektih. V tem zavihku tudi lahko
določimo izhodiščno točko objekta ipd. Zavihek Motion združuje ukaze s katerimi določamo
lastnosti elementov in podelementov pri gibanju. Peti zavihek Display definira način kako se
element prikazuje v pogledih na sredini delovnega okolja. Najbolj spremenljiv je zadnji
zavihek The Utilities panel v katerem se nahajajo različni dodatki za 3DSM. V spodnjem
delu je The Lower Interface bar, v katerem se nahajajo ukazi za prikaz delovnega okolja in
izdelavo animacije. V sredini je časovna skala animacije z različnimi kontrolnimi gumbi za
njen pregled. V skrajnem desnem kotu programskega okna so ikone s katerimi lahko 8 Različni načini izrisa so dostopni pod desnim klikom na element in z izbiro ukaza Convert To:. 9 Move, Rotate, Scale

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
12
spremenimo pogled na željen predmet. Prikazani osnovni ukazi so vse kar potrebujemo za
izdelavo elementov, ki bodo nastopali v naši animaciji.
3.1.1 Izdelava generatorja
Podroben opis okolja, z že narejenimi elementi najdemo v datoteki
ElektroMotorji\EnosmerniGen_Osnovni\ EnosmerniGen_OSnovni.max.
V osnovnem oknu Command Panel izberemo Create => Geometry in vpišemo mere
kvadra. Z desnimi klikom objekt prekopiramo. Prekopirani objekt je označen in na istem
mestu kot original, zato ga ne vidimo. Izvedemo desni klik na Snaps Toogle in izberemo
Endpoint (Slika 3.2).
Slika 3.2: Nastavitve parametra Snap.
S tem omogočimo prijem v kotu objekta. Z desnim klikom in ukazon Move nato
objekt prestavimo na vzporedno mesto. Označimo prvotni objekt in pot Command Panel
izberemo Hierarchy => Affect Pivot Only10. S tem omogočimo premik bazne točke objekta.
Točko premaknemo v kot objekta zaradi kasnejše lažje rotacije objekta (Slika 3.3). Izklopimo
operacijo z bazno točko in objekt prekopiramo. Izberemo ukaz Rotate in vnesemo ustrezne
polarne koordinate ali pa z miško rotiramo objekt.
10 Pivot predstavlja referenčno točko okoli katere se vršijo rotacije, povečave itd.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
13
Slika 3.3: Premik bazne točke in rotacija objekta.
S kopiranjem in premikom nato poskrbimo, da dobimo objekt, kot je prikazan na
spodnji sliki. S tipko Ctrl in klikom izberemo objekta in kliknemo na Material Editor.
Prikaže se okno s katerim urejamo videz objekta. Izberemo poljubno sliko in kliknemo na
polje Diffuse. Iz urejevalnika izberemo ustrezno barvo (Slika 3.4) in s klikom na ikono
Assign Material To Selection izbranima objektoma dodelimo barvo ali material.
Slika 3.4: Izbor materiala.
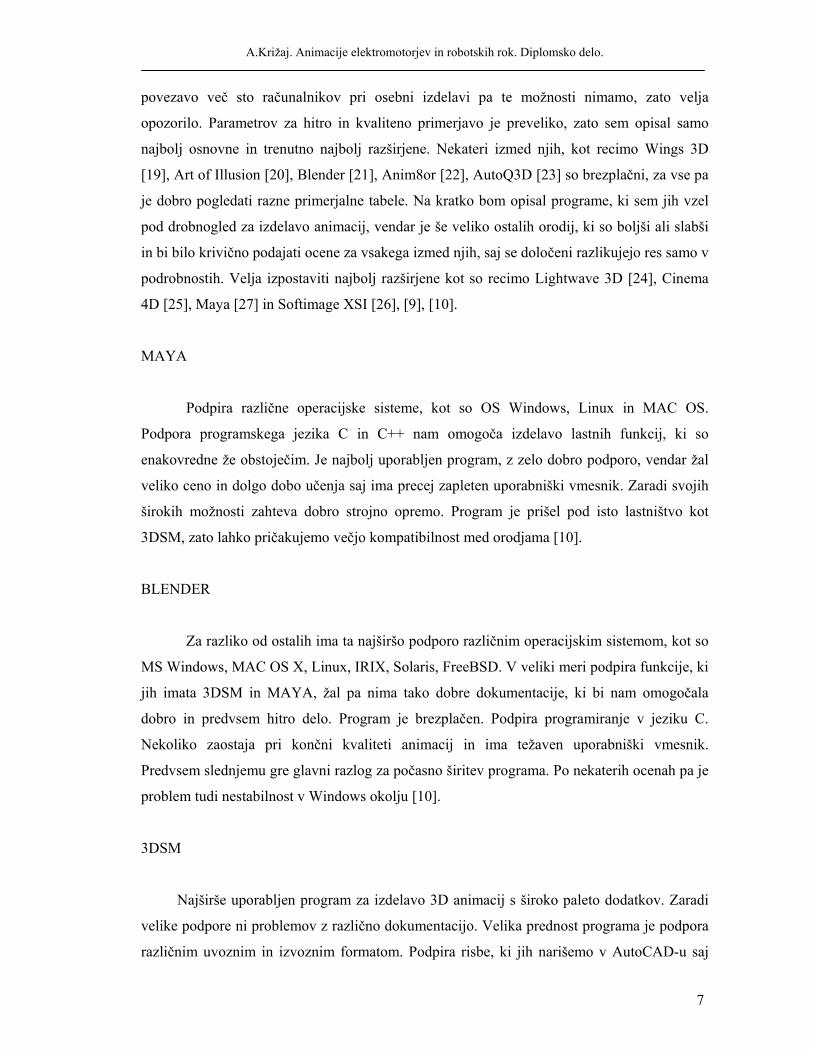
Za izdelavo puščice, ki bodo prikazovale magnetno polje moramo narisati daljico
puščice in konico. Izberemo Cylinder, kliknemo znotraj narisanega objekta v pogledu Front
in vpišemo ustrezne parametre. Konico puščice izdelamo z ukazom Cone in klikom v pogled
Front (Slika 3.5).
A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
14
Slika 3.5: Izdelava puščice.
V snap parametrih (Slika 3.2) označimo Pivot in Center Face ter s tem omogočimo
pozicioniranje na sredino ploskve objekta. Izklopimo snap nastavitve, označimo narejeno
puščico in ji priredimo material. Zaradi lažjega dela s puščico izberemo v menijski vrstici
Group => Group in združenemu objektu priredimo poljubno ime. Z ukazi Copy in Move
nato dobimo magnet z magnetnim poljem (Slika 3.6). Ukaz Move najlažje izvedemo v
pogledu Front.
Slika 3.6: Magnet z magnetnim poljem.
S tem zaključimo risanje objekta. Označimo vse narisane objekte, izvedemo desni klik
na enega izmed njih in izberemo Hide Selection in si tako olajšamo risanje naslednjega
objekta.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
15
Sledi izdelava zaključene zanke, ki se bo vrtela v magnetnem polju. Postavimo se v
pogled Left označimo ukaz Cylinder, kliknemo v pogled Left in vstavimo objekt, ki
predstavlja prvi del zanke (Slika 3.7).
Slika 3.7: Zgornji vodoravni del zanke. Slika 3.8: Zgornji del zanke.
Ukaz ponovimo še za sprednji in zadnji navpični del zanke. Razlika je le v tem, da
delamo v pogledu Top. Višina (Height) sprednjega in zadnjega dela pa je nekoliko manjša.
Zaradi povezave s kolektorjem v pogledu Left dodamo na sprednji strani zanke še kratek valj.
Valj primerno prestavimo kot kaže slika (Slika 3.8). Manjkajoče dele zanke v kotih bi lahko
zapolnili s kroglo (ukaz Sphere), vendar se to izkaže za slab način zaradi kasnejšega
združevanja objektov. Rajši v pogledu Front izberemo kopiranje zgornjega dela zanke in
kopijo za odtenek prestavimo. Z ukazom Compound Object => Boolean in pravilnimi
nastavitvami izberemo še drugi del (Slika 3.9).
Slika 3.9: Uporaba ukaza Compound.
Narejeni delček vstavimo v prazne kote (Slika 3.9). Izvedemo Group, Clone in
Rotate. Po potrebi prestavimo zanko. S podobnimi koraki sledi izdelava kolektorja, v
A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
16
katerega vstavimo objekt, ki predstavlja izolacijo. Celotni zanki priredimo primerno barvo z
Material Editor-jem. Na koncu še enkrat izvedemo ukaz Group in tako dobimo zanko kot
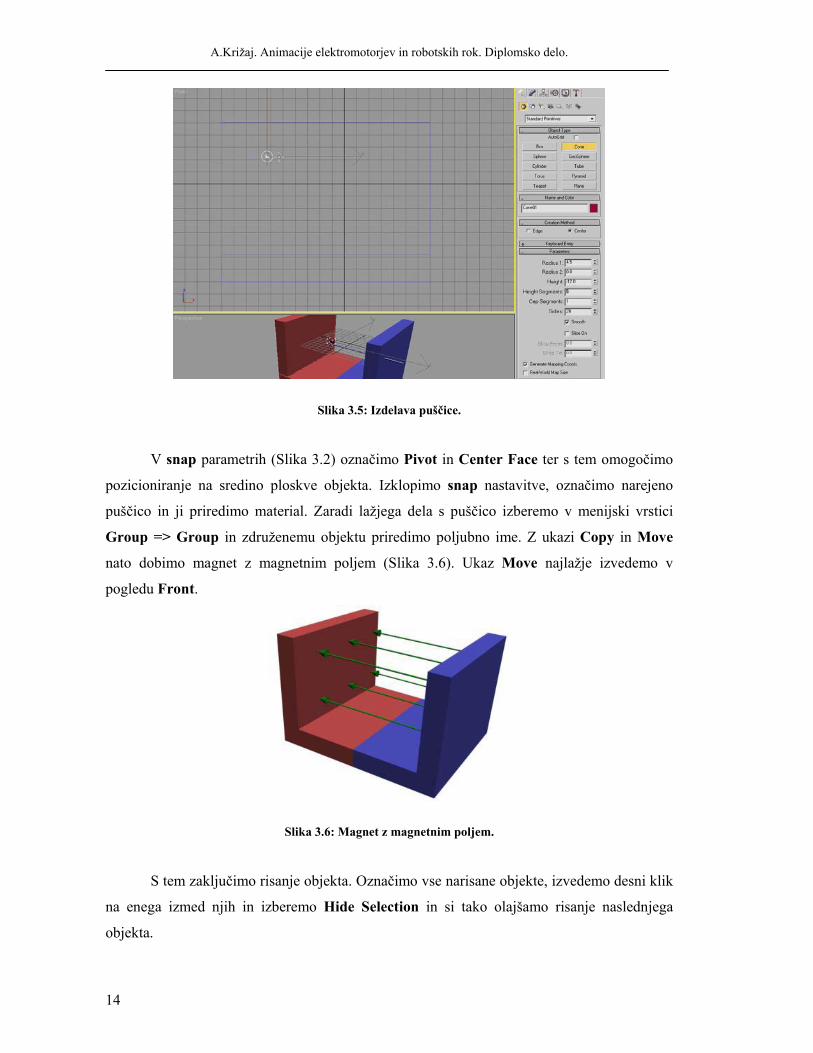
logično celoto. Sledi izdelava gredi, ki jo najlažje narišemo v pogledu Left. Uporabimo že
znano kombinacijo ukazov Cylinder, Move in Snap, kjer slednje najlažje uporabimo v
pogledu Front. Na koncu izvedemo ukaz Group. Podoben postopek sledi še pri izdelavi
vrvice in uteži, le da rišemo v pogledu Top in premikamo objekte v pogledu Front (Slika
3.10).
Slika 3.10: Zanka z utežjo.
Gred z utežjo skrijemo in s tem omogočimo lažje delo pri izdelavi priključkov
kolektorja. Z ukazom Box v pogledu Front narišemo priključek in se z ukazom Move v
pogledu Left ustrezno približamo kolektorju. Pri priključku na kolektor lahko spet uporabimo
ukaz Boolean, le da tokrat izberemo Substraction (A-B). Sledi kopiranje in rotacija
priključka (Slika 3.11), kjer si lahko pomagamo z ukazom Mirror. Grelno žico ponazorimo z
ukazom Helix, ki se nahaja v Command Panel => Create => Shapes => Helix. Pazimo, da
označimo ukaz Enable In ViewPort in Enable In Renderer (Slika 3.11). Na koncu grelno
žico še primerno prestavimo, tako da se dotika priključkov kolektorja. Narisanim objektom
priredimo še poljubni material. Zgodba risanja samega objekta se s tem konča. Grelno žico
skrijemo in prikažemo utež.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
17
Slika 3.11: Zanka, kolektor, priključka in grelna žica.
Podobno kot smo narisali puščice magnetnega polja, sedaj narišemo puščice, ki bodo
ponazarjale silo teže, silo inducirane napetosti in inducirani tok (Slika 3.12). Razlog za
podvajanje puščic na obodu zanke bomo navedli kasneje. Ne smemo pozabiti na ukaz Group,
ki bo združil konico in daljico puščice.
Slika 3.12: Prikaz puščic.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
18
V enem izmed pogledov naredimo desni klik in izberemo Unhide All. Po potrebi
popravimo pozicije posameznih objektov (Slika 3.13). S tem smo narisali vse objekte, ki bodo
nastopili v animaciji.
Slika 3.13: Sestavni elementi animacije.
Na zgornji zgornji sliki skrijemo vse elemente razen gredi in zanke. V spodnjem delu
delovnega okolja vidimo časovni potek. Kliknemo na ikono Time Configuration in vnesemo
parametre animacije (Slika 3.14).
Slika 3.14: Parametri animacije.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
19
Tu določimo dolžino, hitrost, način prikaza animacije itd. Zanimiv je razdelek
FrameRate, kjer lahko določamo število slik na sekundo (FPS11) ali pa izberemo že
prenastavljene možnosti NTSC12 (30 sličic na sekundo) ali PAL13 (25 sličic na sekundo)
Pri izdelavi animacije je pomembno, da pravilno povežemo podredne elemente. S tem
omogočimo, da se podredni element obnaša odvisno od obnašanja nadrednega. V orodni
vrstici kliknemo na ikono Select and Link, kliknemo na gred in nato na zanko. Ukaz poskrbi
za dedovanje določenih lastnosti nadrejega elementa (Slika 3.15). Pri rotiranju zanke bi se
tako sedaj rotirala tudi gred.
Slika 3.15: Povezovanje elementov.
Najlažje posnamemo animacijo z gumbom Auto, ki se nahaja pri časovnem poteku
(Slika 3.16). Ko je vklopljen se vsa dejanja, ki jih naredimo na posameznih objektih znotraj
delovnega okolja posnamejo.
Slika 3.16: Prikaz časovne odvisnosti kota. 11 Frame per Second 12 Ameriški standard za zapis filma. 13 Evropski standard za zapis filma.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
20
Funkcija je izredno uporabna pri prostem oblikovanju vendar zaradi natančnejše
animacije na zanki izvedemo desni klik na objektu in izberemo CurveEditor. Urejevalnik
nam omogoča natančno manipulacijo izbranega objekta. Vodoravna os predstavlja časovni
potek, navpična os pa je odvisna od izbora na levem seznamu. V tem primeru smo izbrali
rotacijo okoli osi X, zato leva os predstavlja kotne stopinje. Z ikono Add Keys dodamo dve
točki, da se nam prikaže daljica, ki narekuje odvisnost kota od časovnega poteka animacije
(Slika 3.16). Po potrebi dodamo več točk, ki nam omogočajo večjo kontrol nad potekom.
Slednje pride v poštev pri neenakomernem gibanju.
Rotiranja okoli ostalih osi ne potrebujemo. V delovnem prostoru prikažemo vrvico in
utež s silo teže. Če želimo prikazati, kako se utež s silo teže vseskozi stika in spušča z vrvico
se mora slednja povečevati v eni dimenziji. Uporabljeni Select and Link ukaz tu ni uporaben,
ker bi se s povečanjem vrvice povečala tudi utež in sile v isti dimenziji kot se je povečala
vrvica. Ukaz uporabimo v odnosu utež – sila teže uteži, kjer je utež nadrejena. V tem primeru
tako izberemo vrvico in v CurveEditor narišemo časovno odvisnost povečevanja objekta. V
levem seznamu izberemo parameter Scale in z Add Keys dodamo točki (Slika 3.17). Zaradi
navidezne rasti objekta vpišemo samo parameter v smeri Z – osi.
Slika 3.17: Časovna odvisnost rasti vrvice.
Zaradi preglednejšega dela za prikaz izberemo zanko in puščice, ki ponazarjajo tok in
silo inducirane napetosti. Ker se bodo morale puščice, ki so razporejene na obodu gibati
skupaj z zanko in istočasno spreminjati velikost uporabimo ukaz Select and Link. To je tudi
razlog, zakaj smo podvajali puščice. Izberemo puščice na obodu in jih povežemo z nadrejeno

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
21
zanko. Značilnost zgornjega ukaza je stalni odnos, kar velja tudi za parameter rotacije, tako se
bo sedaj puščica rotirala skupaj z zanko. Zaradi fizikalnih zakonov moramo poskrbeti za
rotacijo puščic med animacijo, tako da bodo vzdrževale prvotno smer. Za vsako posamezno
puščico odpremo CurveEditor. Na tem mestu bomo podrobneje opisali samo zgornjo rumeno
puščico, ki ima smer navzgor14 in predstavlja silo inducirane napetosti, slike ostalih pa
najdemo v prilogi. Na levi strani izberemo rotiranje okoli X – osi in s pomočjo ukaza
AddKeys dodamo točke. Pomagamo si še z ukazom Set Tangents to Linear, s katerim
poskrbimo za ravne linije med točkama (Slika 3.18).
Slika 3.18: Časovno rotiranje puščice okoli osi X.
Sedaj poskrbimo še za povečanje puščic. V levem meniju izberemo Scale in vnesemo
točke (Slika 3.19), da dobimo spodnjo sliko. Za pomoč v tem primeru služi Set Tangents to
Slow in Set Tangents to Fast.
14 Poimenovanje posameznih pozicij puščic se nanaša na sliko sestavnih elementov animacije (Slika 3.13).

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
22
Slika 3.19: Časovna odvisnost rasti puščice.
Ker puščica ni vseskozi na sliki je potrebno poskrbeti da postane nevidna. Na levem
seznamu se postavimo na puščico in izberemo Tracks => Visibility Track =>Add.
Postavimo se v parameter Visibility in dodamo točki v graf. Tu je pomembno opozoriti, da je
objekt viden, če je vrednost nad 0 in neviden če ima negativno vrednost (Slika 3.20).
Slika 3.20: Časovna odvisnost vidnosti puščice.
V delovnem prostoru sedaj prikažemo še grelno žico. Tudi tu uporabimo CurveEditor
in na levi strani izberemo Diffuse Color. V primeru, da parametra ni, se postavimo na Shader
Basic Parameters izvedemo desni klik in izberemo Assign Controller in iz menija izberemo
Diffuse. V graf vnesemo posamezne RGB15 vrednosti odvisne od časa (Slika 3.21).
15 Rdeča (Red), Zelena (Green), Modra (Blue).
A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
23
Slika 3.21: Časovna odvisnost RGB.
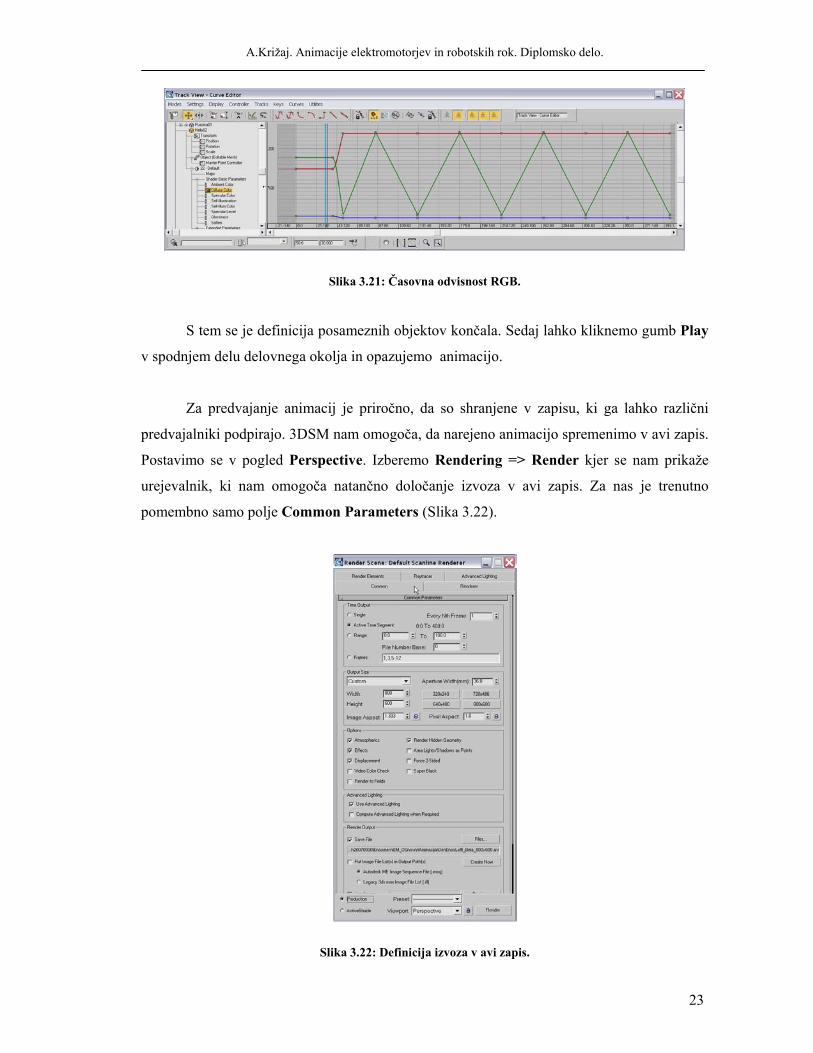
S tem se je definicija posameznih objektov končala. Sedaj lahko kliknemo gumb Play
v spodnjem delu delovnega okolja in opazujemo animacijo.
Za predvajanje animacij je priročno, da so shranjene v zapisu, ki ga lahko različni
predvajalniki podpirajo. 3DSM nam omogoča, da narejeno animacijo spremenimo v avi zapis.
Postavimo se v pogled Perspective. Izberemo Rendering => Render kjer se nam prikaže
urejevalnik, ki nam omogoča natančno določanje izvoza v avi zapis. Za nas je trenutno
pomembno samo polje Common Parameters (Slika 3.22).
Slika 3.22: Definicija izvoza v avi zapis.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
24
Določimo velikost avi zapisa, mesto kamor ga bomo shranili, pogled, ki ga želimo
snemati in podobno. S klikom na gumb Render se začne izdelava filma. Opazimo, da
urejevalnik omogoča še veliko ostalih možnosti. Če želimo spremeniti barvo ozadja
narejenega filma moramo iz menija izbrati Rendering => Environment. Izdelan film je
lahko zelo velik, zato se lahko poslužimo različnih programov, ki omogočajo pretvorbo v
ostale zapise za predvajanje filma. Podoben postopek uporabimo tudi pri izdelavi grafa, ki bo
prikazoval odvisnost napetosti.
Na podoben način, kot smo animirali posamezne zgoraj opisane objekte lahko
animiramo praktično vse objekte, ki jih narišemo. Zanimiva je recimo animacija kamere. Iz
trenutnega okna Perspective lahko z ukazom Views => Create Camera From View
naredimo kamero. S pomočjo ukaza Auto ali CurveEditor pa določimo kako se lahko
kamera giblje med animacijo.
3.1.2 Izdelava grafa
Risanje grafa je veliko preprostejša od risanja preprostega generatorja. Podroben opis
okolja, z že narejenimi elementi najdemo v datoteki ElektroMotorji\EnosmerniGen_Osnovni\
Gen_Preprosti_napetost_enosAnimBela.max.
Podobno kot pri zanki tudi tu definiramo časovni potek animacije. Zaradi kasnejšega
združevanja izberemo isto dolžino animacije. V pogledu Front z že znanimi ukazi Box,
Move, Copy in Rotate izdelamo koordinatni sistem. Z ukazom Create => Shapes => Text
se nam na desni strani prikažejo parametri teksta, ki ga želimo vstaviti. V polje Text vpišemo
poljuben tekst. Zaradi snemanja kasnejšega ukaza Render moramo sedaj vzpostaviti pogoje,
da se bo napisani tekst videl tudi v avi zapisu. To storimo pod odsekom Rendering kjer
izberemo Enable In Renderer in Enable In Viewport. Če bi debelino teksta želeli povečati,
bi to storili v polju Thickness (Slika 3.23).

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
25
Slika 3.23: Vstavljanje napisa.
Časovno odvisnost napetosti bi lahko narisali s preprostim lokom, ki ga narišemo z
ukazom Create => Shapes (Splines) => Arc. Žal 3DSM ni zmožen animirati podaljšanje
poljubno oblikovane daljice. Vrvico, ki je držala utež pri zanki, smo upodobili s preprosto
ravno daljico in zato smo lahko uporabili ukaz Scale. Rešitev problema je nekoliko bolj
zapletena in jo najdemo v ukazu Create=>Geometry (Compound Objects) => Loft. Zaradi
specifičnosti ukaza moramo pred uporabo narisati majhen krog, ki bo določal debelino
sinusiade in prvo četrino periode (za kar je najboljše izbrati ravno ukaz Arc). Najbolj priročno
je, da krog narišemo v pogledu Top, lok pa v pogledu Front. Ukaz Circle se nahaja Create
=> Shapes (Splines) => Circle. Izberemo narisani krog in se vrnemo nazaj k ukazu Loft.
Vnesemo parametre kot kaže slika in izberemo gumb Get Path in označimo narisani lok
(Slika 3.24). Zaradi lažjega dela prestavimo bazno točko na poševni del. Narejeni objekt nato
poravnamo z lokom. Kreiran objekt prekopiramo in rotiramo še za drugo četrtino periode.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
26
Slika 3.24: Izris periode z ukazom Loft.
Prvotni lok lahko sedaj izbrišemo. Označimo prvi Loft in izberemo Modify (Modifier
List) => Loft in pod odsekom Deformation izberemo ukaz Scale. Prikaže se nam časovni
potek deformacije objekta (Slika 3.25), kjer z ukazom Insert Corner Point vstavimo točke.
Slika 3.25: Deformacije periode.
Vidimo, da s postavitvijo kontroliramo prikaz objekta. Na spodnjem delu glavnega
delovnega okna, kjer se nahaja časovni potek animacije pritisnemo gumb Auto. Premaknemo
časovno kazalo na konec animacije ter označimo srednji točki na formi Scale Deformation in
ju premaknemo (Slika 3.26).

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
27
Slika 3.26: Animacija deformacije periode.
Nato izključimo gumb Auto. Isti postopek ponovimo še za drugo četrtino periode. V
že poznanem orodju Curve Editor popravimo prikaz in potek deformacije (Slika 3.27).
Slika 3.27: Popravek poteka deformacije.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
28
Primerno oblikujemo še graf za drugo četrtino periode in objektoma priredimo
ustrezen material. Nato prvi in drugi Loft prekopiramo, tako da dobimo dve periodi. Sledi
izdelava puščice, ki bo sledila sinusiadi. Z že znanimi ukazi (Box) naredimo puščico in nad
njenimi sestavnimi objekti izvedemo ukaz Group. V Curve Editor-ju izberemo parameter
Scale in puščici spreminjamo velikost samo v eni dimenziji (Slika 3.28).
Slika 3.28: Časovno spreminjanje velikosti period.
Puščica mora poleg spreminjanja svoje velikosti spreminjati svojo lego. V levem
seznamu izberemo parameter X Position in časovno odvisnost pozicije (Slika 3.29).
Slika 3.29: Časovni premik puščice na grafu.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
29
3.1.3 Izdelava legende
Sledi izdelava legende. Podroben opis okolja, z že narejenimi elementi najdemo v
datoteki ElektroMotorji\EnosmerniGen_Osnovni\ Legenda_Bela.max. V temu primeru bomo
izbrali pogled Left. Z ukazi, ki so nam že poznani oblikujemo puščice in besede. Pri slednjih
ne smemo pozabiti na ukaza Enable in Renderer in Enable in Viewport s katerimi
zagotovimo primeren prikaz tudi po izvozu v avi zapis. Definicija materialov naj bo podobna,
kot pri že narisanih objektih pri zanki. Pravokotnik narišemo z ukazom Create =>
Shapes(Splines) => Rectangle. Pod odsekom Rendering vnesemo parametre, ki bodo
zagotovili primeren prikaz tudi po izvozu v avi zapis (Slika 3.30).
Slika 3.30: Izdelava legende.
Za potrebe predstavitve smo prestavili pozicijo pogleda Left. To storimo z desnimi
klikom na napis Front => Views => Left. Sledi še definicija materialov in izvoz v avi zapis.
Pri tem ne smemo pozabiti definirati belega ozadja.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
30
3.1.4 Spojitev filmskih datotek z Adobe Premiere Pro
Prvi korak pri oblikovanju filma so njegove zunanje lastnosti med katere spada poleg
drugih tudi velikost okna, v katerem bomo prikazovali animacijo. Primer izdelave je opisan
spodaj, delovno okolje z že narejenimi elementi pa se nahaja na zgoščenki v datoteki
ElektroMotorji\EnosmerniGen_Osnovni\EnosmerniGen_Animacija_800x600.zip. Za prikaz
izberemo prenastavljane parametre (Slika 3.31).
Slika 3.31: Osnovni parametri animacije.
Po prikazu osnovnega delovnega okolja se osredotočimo na delovno okno Project
(Slika 3.32).
Slika 3.32: Uvoz datoteke in časovna umestitev.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
31
V tem oknu izvedemo desni klik, izberemo Import in uvozimo avi animacije, ki smo
jih izdelali s 3DSM. Nato z levim klikom izberemo enega izmed njih ter ga prenesemo v
delovno okno Timeline (Slika 3.32). Tu ga ponovno izberemo in v delovnem okolju Monitor
se nam prikažejo lastnosti izbrane animacije.
S parametri Position in Scale nato poljubno premikamo ali kontroliramo velikost
filma. Podobno naredimo še z ostalimi animacijami. Določimo jim velikost in primerno
pozicijo v animiciji (Slika 3.33). Pri tem pazimo na pravilen prikaz in na polno zapolnitev
delovnega okna Sequence.
Slika 3.33: Pozicija posameznih animacij.
Sledi izvoz v poljubni format. Kliknemo v delovno okno Sequence nato pa izberemo File =>
Export => Movie. Pod gumbom Settings bi lahko izbrali dodatne nastavitve filma, vendar se
bomo tu držali prenastavljenih nastavitev (Slika 3.34).

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
32
Slika 3.34: Izvoz v skupno datoteko.
S tem je izdelava in združevanje različnih animacij končana.
3.2 Animacije robotske roke s 3DSM
Za razliko od motorjev tu ne bomo uporabili združevanja različnih animacij, ampak
bomo animacijo končali že v 3DSM. Podobno kot pri izdelavi motorja, tudi tukaj začnemo s
praznim delovnim prostorom. Samo delovanje robotske roke je enostavnejše kot pri
elektromotorjih, saj imamo zmeraj opravka samo z eno točko. Prav tako pa nam ni potrebno
izdelovati več časovno enakih animacij. Delovno okolje z že narejenimi elementi pa se nahaja
na zgoščenki v datoteki RobotskeRoke\PrenosKocke\CilindricnaRobotskaRoka_1Lego.max.
Slika 3.35: Model robotske roke .

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
33
Za glavne gradnike vzamemo kvader in valj ter izdelamo model robotske roke (Slika
3.35), kateri nato dodelimo ustrezno barvo in material. Sledi povezovanje posameznih
elementov z ukazom Select and Link ali ukazom Bone. Zaradi lažjega prikaza posameznih
smeri gibanja vrha robotske roke bomo uporabili ukaz Select and Link. Iz diagrama (Slika
3.36) vidimo, da samega podstavka (Platform) ne povežemo z robotsko roko in da za glavni
nadrejeni element izberemo sklep za rotacijo (Triceps1). Sledi povezava na vertikalni del
(Leg1), ki »nosi« navpični translacijski sklep (Biceps1). Slednji se poveže na drugi vertikalni
del (Leg2) in nato naprej na vodoravn del (Leg3), ki se konča pri horizontalnem
translacijskem sklepu (Biceps2). Sledi še zadnji element (Leg4). Tako smo dosegli gibanje
vrha robotske roke v odvisnosti od rotacijskega sklepa.
Slika 3.36: Diagram sestavnih delov robotske roke.
Pri samem načrtovanju gibanja moramo sedaj paziti le na vrstni red s katerim
premikamo posamezne elemente. Začeti moramo pri rotacijskem sklepu in končati pri
zadnjem elementu (Leg4). Do zaključka lahko pridemo po več poteh. Lahko premikamo sam
element, katerega podaljšek se nahaja v vodoravnem translacijskem sklepu. Lahko ga med
animacijo primerno povečujemo v eni dimenziji ali pa premikamo sam translacijski sklep
(poskrbimo za dovolj veliko Leg3) ali pa povečujemo Leg3 in poskrbimo, da se povečevanje
ne deduje na podrejene elemente (zavihek Modifay).
Ker želimo prikazati primer gibanja robotske roke, določimo lastnosti animacije (Slika
3.14) Slednja bo vključevala tudi prikaz osnovnih smeri gibanja točke na vrhu robotske roke,
zato mora biti animacija temu primerno dolga. V prvem koraku pritisnemo gumb Auto in
premaknemo časovni kazalec na del, kjer naj bi se rotacija sklepa končala. Nato izvedemo
samo rotacijo sklepa (Slika 3.39 – prvi del krivulje). Po potrebi lahko določamo vmesne

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
34
korake, le da v tem primeru časovni kazalec premaknemo primerno manj. V drugem koraku
nato po istem postopku izvedemo premik vertikalnega dela (Slika 3.41 – prvi del krivulje) in
na koncu še premik horizontalnega dela robotske roke (Slika 3.43 – prvi del krivulje). S tem
smo poskbeli za premik vrha. Zaradi boljšega razumevanja moramo prikazati ta premik z
navideznim upodabljanjem kroženja. Tako kot pri izdelavi generatorja tudi tukaj uporabimo
ukaz Loft. Za osnovno pot narišemo krog, ki ga primerno gibu roke rotiramo, tako da dobimo
v tlorisu obliko elipse (Slika 3.37). Nato z majhnim krogom določimo prerez navidezne poti
in uporabimo ukaz Loft. Samo naraščanje med animacijo nato določimo podobno kot pri
motorju. Pri izvedbi ne smemo pozabiti na gumb Auto.
Slika 3.37: Prikaz poljubne poti robotske roke.
Zaradi didaktičnega učinka pustimo sliko nekaj časa na miru, nato pa narisano pot
skrijemo s parametrom CurveEditor => Visibility Track (Slika 3.38). Sledi izdelava prikaza
možnih smeri v katerih se vrh robotske roke lahko premika.
Slika 3.38: Vidnost poljubne krožne poti cilindrične r.r.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
35
Podobno kot pri risanju poljubne poti, tudi tukaj izvedemo rotacijo v sklepu (Slika
3.39 – drugi del krivulje), vendar med časovnim potekom ne premikamo ostalih elementov.
Narisano pot potem skrijemo in jo prikažemo šele na koncu animacije (Slika 3.40).
Slika 3.39: Časovni potek rotacije cilindrične r.r.
Slika 3.40: Vidnost krožne poti cilindrične r.r.
Nato narišemo vertikalno linijo in za definicijo prereza izberemo isti krog, kot smo ga
uporabili pri izrisu poljubne poti. Izvedemo ukaz Loft in določimo naraščanje med animacijo.
Narisano pot nato skrijemo. Šele nato izvedemo premik (Slika 3.41 – drugi del krivulje)
vertikalnega dela s pripadajočim ukazom Loft in animacijo s pripadajočo nevidnostjo (Slika
3.42).
Slika 3.41: Časovni potek vertikalne translacije r.r.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
36
Slika 3.42: Vidnost vertikalne poti cilindrične r.r.
Kot zadnja v procesu se izvede horizontalna translacija (Slika 3.43 – drugi del krivulje) in nevidnost poti (Slika 3.44).
Slika 3.43: Časovni potek horizontalne translacije cilindrične r.r.
Slika 3.44: Vidnost horizontalne poti cilindrične r.r.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
37
Na koncu prikažemo vse možne strani (Slika 3.45). Zaradi boljše predstave narišemo
puščice, ki upodabljajo smeri gibanja. Puščice so vseskozi nevidne in jih prikažemo šele v
zadnjem delu animacije. S tem je prikaz osnovnih smeri končan. Animacijo izvozimo v avi
zapis (Slika 3.22).
Slika 3.45: Osnovne smeri cilindrične r.r.
V drugi animaciji robotski roki dodamo zapestje, v prostor pa namestimo stolp s
kocko in kupom kock. Zapestje upodobimo iz treh valjev, katerih osi so med seboj pravokotne
(Slika 3.46).
Slika 3.46: Zapestje robotske roke s kocko.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
38
S pomočjo ukaza Select and Link nato povežemo posamezne dele zapestja v celoto, kjer je
nadredni element zadnji del robotske roke t.j. Leg4. V diagramu (Slika 3.47) vidimo, da
zapestju dodamo še kocko.
Slika 3.47: Diagram sestavnih delov zapestja.
Razlog tiči v dejstvu, da 3DSM med animacijo ne dopušča ukaza Select and Link.
Tako bomo imeli kocko na stolpu, kocko v prijemalu in kocko na kupu kock. Potovanje kocke
(Slika 3.48) uprizorimo z nevidnostjo v posameznih kock v časovnem obdobju.
Slika 3.48: Premik in vidnost kocke.
V začetku je vidna samo kocka na stolpu. V trenutku ko izvedemo prijem, sta
(nevidna) kocka v prijemalu in kocka v stolpu na istem mestu in prvo napravimo vidno, drugo
pa nevidno. Zgodba se ponovi pri namestitvi kocke na kup ostalih kock (Slika 3.49, Slika
3.50 in Slika 3.51).

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
39
Slika 3.49: Vidnost kocke na stolpu.
Slika 3.50: Vidnost kocke v prijemalu.
Slika 3.51: Vidnost kocke na kupu kock.
Podobno kot v prejšnem poglavju s pomočjo tipke Auto izvedemo rotacijo robotske
roke (Slika 3.52), vertikalno (Slika 3.53) in horizontalno translacijo (Slika 3.54).

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
40
Slika 3.52: Časovni potek rotacije cilindrične r.r. s bremenom.
Slika 3.53: Časovni potek vertikalne translacije cilindrične r.r. s bremenom.
Slika 3.54: Časovni potek horizontalne translacije cilindrične r.r. s bremenom.
Pri rotaciji zapestja moramo paziti na časovno ujemanje z ostalimi gibi. Zaradi
specifičnosti t.i. globanega koordinatnega sistema (Global Coordination Space) bi se v
primeru rotacij sklepa te izvajale izven svoje navidezne osi. Zato moramo uporabiti lokalni
koordinatni sistem v vsakem sklepu zapestja posebaj. Pri srednjem (Slika 3.55) členu zapestja
(Palm02) v lokalnem sistemu izvajamo samo rotacijo okoli osi X. V CurveEditor-ju se temu
primerno izrišejo krivulje, kjer se spreminja samo vrednost parametra X v lokalnem
koordinatnem sistemu in ne globalnem.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
41
Slika 3.55: Rotiranje srednjega člena zapestja po lokalnih oseh.
Prijemalo je povezano z zapestjem, zato tudi pri njem lahko izvedemo istočasni gib v
smeri osi Z (Slika 3.56) in osi Y (Slika 3.4).
Slika 3.56: Premik prijemala v smeri osi Z.
Slika 3.57: Premik prijemala v smeri osi Y.
Z natančno postavitvijo tako dosežemo učinek, kjer kocko prestavimo iz enega mesta
na drugo, ne da bi s tem kršili mehanske in fizikalne značilnosti. Narejeno animacijo
izvozimo v avi zapis (Slika 3.22).

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
42
4 Motorji in generatorji
Poznamo več vrst motorjev, ki imajo še več različnih izvedb, v grobem pa jih delimo
na sinhronske in asinhronske stroje. Vsi so zgrajeni iz statorja (del, ki miruje) in rotorja (del,
ki se giblje). Pri sinhronskih strojih se rotor vrti skladno (sinhrono) z vrtenjem magnetnega
polja, ki ga ustvarjajo tuljave na statorju. Velja reverzibilnost delovanja, kar pomeni da je
lahko vsak motor generator in vsak generator motor. Pri asinhronskih se hitrost vrtenja pri
dani frekvenci omrežja spreminja v odvisnosti od obremenitve. Tok v rotorju se inducira
zaradi vrtečega magnetnega polja, kar ima za posledico navor, ki deluje na rotor in sili k
premikanju. V primeru komutatorskih strojev sta vlogi zamenjani in je izvor magnetnega
polja stator, kjer se lahko uporabi trajni magnet ali elektromagnet. Povsod je osnova za
razumevanje gibanje vodnika v magnetnem polju [11].
Pri izdelavi animacij motorjev ne bomo upoštevali določenih realnih okoliščin, ki jih
raje izpustimo za lažjo predstavo bistvenih delov razlage. Tako smo izpustili pospešeno
gibanje uteži, ki bi posledično vplivala na vedno hitrejše gibanje zanke in na sam prikaz
napetosti v odvisnosti od časa. Puščice, ki označujejo smer toka in velikost sile smo
premaknili nekoliko izven zanke in s tem spregledali dejstvo, da tok dejansko teče po površju
zanke. Prav tako nismo risali velikosti navora in realni izgled magnetnega polja. Dejstvo je,
da izdelujemo animacijo in da je upodobitev določenih delov sicer možna vendar zahteva
ogromno časa. Lep primer za to je realna slika magnetnega polja in njegova interakcija z
zanko (Slika 4.1).
Slika 4.1: Sprememba magnetnega polja [12].

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
43
Izognili smo se tudi prikazu vseh mehanskih delov, ki zagotovijo nemoteno delovanje
stroja in izgubam zaradi trenja, zračnega upora, vrtičnih tokov, histereze, segrevanja ipd. V
animaciji želimo prikazati le glavne lastnosti [11].
4.1 Nastanek izmenične in enosmerne napetosti
Sila na vodnik, skozi katerega teče tok in je v homogenem magnetnem polju, je
največja takrat, ko vodnik seka silnice pod pravim kotom in 0o kadar so silnice vzporedne
vodniku (Slika 4.2).
BlIFvvv
×= (1)
Slika 4.2: Vodnik v magnetnem polju [12].
Kar lahko zapišemo tudi v obliki
F = IlB sin α (2)
Vodnik lahko oblikujemo v zanko in jo postavimo v homogeno magnetno polje. Iz sil na
vodnike dobimo navor na zanko v homogenem magnetnem polju.
BSIMvvv
×= (3)
in je po velikosti enak
M = ISB sin α (4)

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
44
Vodnik, ki je v homogenem magnetnem polju in se enakomerno premika pravokotno glede na
njegove silnice, med svojima zaključkoma inducira napetost Ui.
Ui = B . l . v (5)
Pri tem B predstavlja gostoto magnetnega polja, l dolžino vodnika in v hitrost premikanja. Če
se zanka vrti s stalno kotno hitrostjo, se največja napetost inducira, ko je pravokotna
komponenta hitrosti prečkanja magnetnega polja največja, kadar pa je hitrost prečkanja
magnetnega polja najmanjša, je inducirana napetost nič (Slika 4.3) [11].
Slika 4.3: Kroženje vodnika v magnetnem polju [13].
Pravokotno komponento hitrosti opišemo kot
vp = v0 sin αt (6)
kjer je αt kot med normalo na ravnino zanke in smerjo magnetnega polja. Podobno opišemo
tudi inducirano izmenično napetost Ui, ki nastane med zaključkoma vodnika [11].
Ui = Um . sin αt (7)

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
45
4.2 Generator enosmerne napetosti
Kot že rečeno vrtenje zanke v homogenem magnetnem polju povzroči v zanki
električni tok. Zanko pritrdimo na gred na kateri se nahaja utež, ki povzroči vrtenje zanke.
Čeprav se velikost navora zanke ne spreminja, se spreminja smer navora in zato se spremeni
tudi smer toka. Zanka je pritrjena na kolektor, ki je sestavljen iz dveh lamel. Po kolektorju
drsita dve ščetki, ki sta nameščeni tako, da se smer toka spremeni takrat, ko se zamenja smer
toka v zanki. Tok med priključkoma ščetk ima tako vedno pozitivne valove. Princip
elektromotorja je podoben kot pri generatorju, le da tu na priključkih ustvarimo napetost. To
povzroči električni tok v zanki. Na zanko zato deluje navor, ki zavrti zanko na eni strani
navzgor na drugi strani pa navzdol. Navor je največji takrat, ko je kot med normalo na
ravnino, ki jo tvori zanka in smerjo magnetnega polja enaka 90o. V temu primeru gredo
magnetne silnice vsporedno z ravnino [11], [14].
Slika 4.4: Generator enosmerne napetosti.
Sliko animacije lahko vidimo zgoraj (Slika 5.4), ogledamo pa si jo lahko tudi na priloženi
zgoščenki v datoteki Animacije\Elektromotorji\Avi\EnosmerniGenerator_800x600.avi.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
46
4.3 Generator enosmerne napetosti z dvema zankama
Samo delovanje generatorja je podobno kot pri preprostem enosmernem generatorju,
le da tu za bolj gladko enosmerno napetost namestimo dve zanki in temu ustrezno razdelimo
kolektor. V trenutku padanja napestoti s tem omogočimo preklop ščetk na drugo zanko, v
kateri napetost narašča in s tem dobimo bolj gladko napetost [11]. Sliko animacije (Slika 5.5)
in ovojnico inducirane napetosti (Slika 5.6) vidimo spodaj. Ogledamo pa si jo lahko tudi na
priloženi zgoščenki Animacije\Elektromotorji\Avi\EnosmerniGenerator_Dvojni_800x600.avi.
Slika 4.5: Generator enosmerne napetosti z dvema zankama.
Slika 4.6: Enosmerna inducirana napetost.
Čeprav gre za podobno animacijo in za podobne napake kot pri preprostem
generatorju enosmerne napetosti z eno zanko, se sam postopek začne čisto na začetku. Večino

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
47
elementov lahko prekopiramo, vendar velja opozoriti, da se zgradba zanke spremeni, kar ima
za posledico prekinitev vseh lastnosti povezanih elementov (ukaz Group). Puščice, ki
ponazarjajo sile in tok so bile povezane z ukazom (Link), zato moramo vse postopke
povezovanja, rotiranja in premikanja ponoviti. Graf poteka napetosti lahko uporabimo vendar,
če želimo poudariti končno napetost, moramo narediti določene popravke. Graf poteka toka
lahko prav tako uporabimo, vendar moramo dodati točke na grafu (Slika 4.7). Najlažje to
naredimo, če ovojnico narišemo posebej in jo prikažemo le na koncu, sprotni potek pa
spremenimo v nevidnega. Delovno okolje z izdelanimi elementi si lahko ogledamo na
priloženi zgoščenki v mapi ElektroMotorji\EnosmerniGen_OsnovniDvojni\.
Slika 4.7: Spreminjanje velikosti toka pri generatorju enosmerne napetosti z dvema zankama.
4.4 Generator izmenične napetosti
Princip delovanja je enak, kot pri generatorju enosmerne napetosti, le da tu namestimo
kolektor (Slika 4.9), ki omogoča neprekinjeno povezavo z zanko. Tudi tu velja reverzibilnost
delovanja, zato bi generator v primeru priključitve izmenične napetosti na priključke
kolektorja lahko uporabili kot EM. Napetost bi imela za posledico tok, ki povzroči magnetno
polje okoli vodnika. Ker se zanka nahaja v zunanjem magnetnem polju, pride do interakcije,
kjer zanko na eni strani sila premika navzgor na drugi strani pa navzdol [11]. Delovno okolje
z izdelanimi elementi si lahko ogledamo v mapi ElektroMotorji\IzmenicniGen_Osnovni\.
Animacijo (Slika 4.8) pa lahko najdemo najdemo na priloženi zgoščenki
Animacije\Elektromotorji\Avi\IzmenicniGenerator_800x600.avi.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
48
Slika 4.8: Generator izmenične napetosti.
Slika 4.9: Kolektor generatorja izmenične napetosti.
Za izhodiščno risbo ponovno vzamemo preprosti enosmerni generator. Zaradi
podobnosti risb lahko v prvem koraku prekopiramo celotno zanko. V drugem koraku
originalu nato podremo hierarhijo elementov in ponovno izdelamo kolektor. V tretjem koraku
izvedemo ukaz Select and Link. Nato v prekopirani zanki izberemo posamezen graf in ga
prekopiramo v predelani original (Slika 4.10). Sledi še premik točk glede na čas za zanko in
nato še za puščice. Podobno si pomagamo pri izdelavi grafa, le da tu posamezne periode
zrcalimo preko osi. Ni nam potrebno spremeniti rasti puščice, ki ponazarja napetost vendar pa
moramo spremeniti časovni potek rotacije puščice.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
49
Slika 4.10: Spreminjanje toka pri generatorju izmenične napetosti.
4.5 Nastanek trifazne napetosti
Pri sinhronskih motorjih in generatorjih se rotor vrti skladno (sinhrono) z vrtenjem
magnetnega polja. Iz tega sledi, da je frekvenca vrtenja rotorja enaka frekvenci vrtenja
magnetnega polja. Tako na primer pri frekvenci napetosti 50 Hz frekvenca vrtenja rotorja z
enim parom polov znaša 50 Hz. Pri takšnih motorjih ali generatorjih uporabljamo trajni
magnet ali elektromagnete z ločenim enosmernim napajanjem. Vsak sinhronski motor lahko
deluje kot generator in obratno. Pri izvedbi generatorja se vrti vir magnetnega polja to je
dipolni magnet, tuljave pa so nameščene na statorju. Pari zaporedno vezanih tuljav so
premaknjeni za 1200, njihove osi pa se sekajo v točki osi vrtenja trajnega magneta. Zaradi
vrtenja magneta se pojavi vrteče magnetno polje, kar povzroči spreminjanje magnetnega polja
v tuljavi. V vsakem paru nasprotnih tuljav, ki sta med seboj povezani, se zaradi tega med
priključkoma inducira napetost. Ob enem vrtljaju magneta za 3600 se tako inducira ena
perioda izmenične napetosti. Enačbo za eno periodo sedaj zapišemo za vsako periodo posebej
[11].
)120sin(
sin)120sin(
033
22
011
+=
=−=
tmi
tmi
tmi
UU
UUUU
α
αα
(8)

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
50
Zaradi rotiranih parov tuljav so za 1200 fazno zamaknjene tudi inducirane napetosti (Slika
4.11) in tok, ki ga te napetosti poženejo po tuljavah, pa tudi magnetno polje, ki je posledica
teh tokov. Seštevek gostote magnetnih polj v tuljavi je v vsakem trenutku enak gostoti
magnetnega polja trajnega magneta.
Slika 4.11: Časovni diagram trifazne napetosti.
4.6 Trifazni sinhronski generator
Vrti se vir magnetnega polja, ki v tuljavah inducira napetost. Animacija (Slika 4.12) je
drugačna kot ostale, zato moramo nove elemente še narisati. Zaradi treh faz, ki nastopajo v
animaciji, moramo ponovno izdelati celoten graf in nato še končno napetost (Slika 4.13). Ker
želimo prikazati inducirano magnetno polje v tuljavah, ki se spreminja v odvisnosti od
trajnega magneta, moramo določiti časovni potek rasti puščice. Bazno točko (Pivot Point)
prestavimo v središče puščice in tako omogočimo raztezanje v vse smeri enako. Isto puščico
lahko nato brez večjega truda uporabimo tudi pri trajnem magnetu. Izdelava grafa je v temu
primeru nekoliko bolj zapletena, saj imamo namesto ene periode opraviti s tremi. Posamezne
cele periode izdelamo podobno kot pri enosmernem generatorju. Pri izdelavi necelih period pa
naletimo na problem, saj zaradi ukaza Loft ne moremo preprosto skrajšati že narejene
periode, pač pa moramo oblikovati nov lok in ponovno uporabiti ukaz. Animacijo najdemo na
priloženi zgoščenki Animacije\Elektromotorji\Avi\TrifazniSinhGen_800x600.avi. Delovno
okolje z izdelanimi elementi pa si lahko ogledamo v mapi ElektroMotorji\TrifazniSinhGen\.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
51
Slika 4.12: Trifazni sinhronski generator.
Slika 4.13: Trifazna inducirana napetost
V primeru motorja je potek podoben, le da na tuljave priključimo napetost, ki povzroči
tokove v tuljavah. Stator tako oblikuje vrtilno magnetno polje, ki z navorom na rotor
slednjega spravi v gibanje. Navor na rotor je nespremenjen, če magnetno polje kroži z enako
frekvenco kot rotor. Puščica, ki ponazarja velikost in smer toka (Slika 4.14) se spreminja tako
po smeri (rdeča krivulja) kot velikosti (modra krivulja). Za zagon sinhronskega motorja je
zaradi mirujočega rotorja na začetku potrebna sinhronizacija, ki jo večinoma opravi
kratkostična kletka (Poglavje 4.8). Dokler se rotor ne vrti sinhrono, deluje na kratkostično
kletko navor. Ko je hirost vrtenja enaka hitrosti vrtenja magnetnega polja pa je navor na rotor
odvisen od trenutnega kota med smerjo magnetnega polja rotorja in smerjo magnetnega polja
magnetnice. Kot se spreminja glede na obremenitev. Kadar je ta obremenitev prevelika rotor
izgubi sinhronizacijo in se ustavi [11].

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
52
Slika 4.14: Spreminjanje toka pri generatorju trifazne napetosti.
4.7 Sklop trifaznega generatorja in motorja
Kot smo že omenili je za sinhronske stroje značilna reverzibilnost delovanja.
Posamezne faze napetosti generatorja in motorja med seboj povežemo. V prvem sklopu se
zaradi rotiranja trajnega magneta, na katerega deluje navor uteži, generira trifazna napetost. V
drugem sklopu pa rotiranje magneta povzroči vrtilno magnetno polje, ki nastane zaradi
posameznih magnetnih polj tuljav. Izgub, ki nastanejo, ne upoštevamo.
Slika 4.15: Sklop trifaznega generatorja in motorja.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
53
Delovno okolje z izdelanimi elementi si lahko ogledamo v mapi ElektroMotorji\
TrifazniSinhGen_Izmenjava\. Animacijo (Slika 4.15) pa najdemo na priloženi zgoščenki
Animacije\Elektromotorji\Avi\TrifazniSinhGenIzmenjava_800x600.avi.
4.8 Prikaz kratkostične kletke v trifaznem asinhronskem
elektromotorju
Asinhronski elektromotor ima podobno kot sinhronski generator na tri pare tuljav,
namesto trajnega magneta pa postavimo kratkostično kletko. Kratkostična kletka (Slika 4.16)
je sestavljena iz palic in dveh obročev.
Slika 4.16: Kratkostična kletka.
Vrtilno magnetno polje v kletki inducira napetost, ki po palicah požene močne
kratkostične tokove, ki na eni strani tečejo po palicah navzgor po drugi strani pa navzdol.
Zaradi tokov nastane okoli posameznih palic magnetno polje. Posamezne palice tako čutijo
privlak vrtilnega magnetnega polja, ki delujejo na njih z vrtilnim momentom. Navor, ki deluje
na tokove v kletki ima enako smer kot je smer vrtenja magnetnega polja, zato se kratkostična
kletka zavrti v isti smeri. Frekvenca vrtenja kratkostične kletke je tako manjša od frekvence
vrtenja magnetnega polja. Odstotek zaostajanja frekvence rotorja (fR) za vrtljaj vrtilnega
magnetnega polja (fS) motorja imenujemo slip [11].
%100S
RS
fffs −
= (9)

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
54
Slika 4.17: Vrteče magnetno polje.
Pri izdelavi animacije (Slika 4.17) se ponovno pojavi problem upodobitve magnetnega
polja, zato se odločimo za prikaz v dvodimenzionalnem pogledu. Pri izdelavi upodobitve
posameznih magnetnih polj (Slika 4.18, Slika 4.19 in Slika 4.20) moramo biti pozorni na
določanje bazne točke posameznih puščic, ki mora biti nameščena v osi vrtenja. Spreminjati
moramo samo parameter velikosti in parameter rotacije za mag. polje prvega, drugega,
tretjega para tuljav in skupnega mag. polja. Slednji ima samo dve možni smeri, ki se
zamenjujeta v trenutku, ko je velikost najmanša. Animacijo najdemo na priloženi zgoščenki
Animacije\Elektromotorji\Avi\KratkosticnaKletka_800x600.avi. Delovno okolje z izdelanimi
elementi pa si lahko ogledamo v mapi ElektroMotorji\RotirajoceMagnetnoPolje\.
Slika 4.18: Spreminjanje mag. polja B1 asinhronskega motorja.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
55
Slika 4.19: Spreminjanje mag. polja B2 asinhronskega motorja.
Slika 4.20: Spreminjanje mag. polja B3 asinhronskega motorja.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
56
5 Robotske roke
Delo robotskih rok je povezano z njihovo prostorsko geometrijo. Znano je, da za opis
točke v tridimenzionalnem prostoru potrebujemo tri koordinate. Zaradi tega potrebujemo za
doseg vseh točk v prostoru tri prostostne stopnje, če pa želimo še kontrolo nad smerjo, od
koder bomo predmet prijeli, potrebujemo še nadaljne tri prostostne stopnje. S tem je dosežen
poljuben položaj in orientacija predmeta v prostoru. Glavna naloga robotske roke je določanje
pozicije vrha na katerem je nameščeno zapestje. To dosežemo z uporabo različnih vrst
sklepov. Najbolj pogosta sta rotacijski (oznaka R) in translacijski (oznaka T). Hitrost in
natančnost določamo z različnimi gonilnimi sistemi, kot so servomotorji, koračni motorji,
hidravlika in pnevmatika. S sestavljanjem različnih sklepov dobimo več prostorskih stopenj
ter tako omogočimo različne mehanske lastnosti in prilagodljivost delovnega prostora. V
industriji se uporabljajo različne kombinacije sklepov, ki niso omejeni na šest prostostnih
stopenj in najdemo tudi sestave, ki imajo dvajset ali več sklepov. V primeru, da ima roka več
kot šest osi lahko dosežemo tudi gibanje, s katerim se izogibamo oviram znotraj delovnega
prostora. Ena izmed lastnosti robotske roke je tudi maksimalna masa, s katero je še možno
opravljati in je odvisna od same konstrukcije. Maksimalna masa se zmeraj določa, ko je roka
v položaju, kjer je nosilnost najmanjša. V primeru polarne ali cilindrične robotske roke je to
pri popolnem iztegu. Sama hitrost gibanja roke znaša od nekaj 10 cm/s do 10 m/s. Hitrost je
odvisna od natančnosti s katero mora opravljati vrh roke, teže s katero delamo, oddaljenosti
objekta itd. Tako je recimo pri večji natančnosti potrebna manjša hitrost. Eden izmed bolj
pomembnih lastnosti je tudi doseg ali delovni prostor v katerem se lahko giblje vrh roke in je
odvisen od tipa robotskih rok. Med osnovne tipe robotskih rok spadajo:
• Kartezična robotska roka (oznaka TTT)
• Cilindrična robotska roka (oznaka RTT)
• Polarna robotska roka (oznaka RRT)
• SCARA robotska roka (oznaka RTR)
• Členasta robotska roka (oznaka RRR)
Zapestje, ki je nameščeno na vrhu robotske roke, skrbi za orientacijo telesa v prostoru.
Oblika zapestja je odvisna od naloge, ki jo bo opravljal robot. Spet je možno uporabiti več
sklepov, vendar bomo tukaj uporabili najbolj univerzalnega. Zapestje sestavljajo trije
rotacijski sklepi, katerih osi so med seboj pravokotne. Robotu s tem omogočimo kontrolo

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
57
celotnega prostora. Na vrhu zapestja se nahaja prijemalo, ki je v svoji najbolj osnovni obliki
sestavljeno iz dveh prstov (Slika 2.4), ki omogočata prijem predmeta. [2]
5.1 Kartezična robotska roka
Je najbolj osnovna oblika robotske roke in je primerna za prenos težkih bremen. Trije
translacijski sklepi (oznaka TTT) skrbijo za premik v treh oseh, ki so med seboj pravokotne
(Slika 5.1), zato se vrh robotske roke lahko poljubno premika (Slika 5.2) in s tem doseže
željeno točko v prostoru. Z različnimi izvedbami sklepov lahko povečamo delovni prostor
robotske roke [2].
Delovno okolje v 3DSM z izdelanimi elementi si lahko ogledamo na zgoščenki
\RobotskeRoke\SmeriGibanja\KartezicnaRobotskaRoka_1a.max. Animacijo pa na
\Animacije\RobotskeRoke\SmeriGibanja\Avi\RobotskarokaKartezicna_R1a.avi.
Slika 5.1: Osnovne smeri kartezične roke Slika 5.2: Poljubna pot kartezične roke
Obe zgornji sliki predstavljata del animacije, za prikaz delovanja TTT roke. Pri
zgornji sliki (Slika 5.1) smo ločeno narisali robotsko roko in puščice. Na začetku animacije
vse puščice skrijemo. Izvedemo premik vertikalnega dela robotske roke. Zaradi ukaza Link se
premaknejo tudi vsi ostali deli. V istem časovnem terminu prikažemo modro puščico, ki se z
ukazom Scale povečuje v smeri, ki jo narekuje premik roke. Nato modro puščico označimo za
nevidno ter ponovimo postopek z rdečo in zeleno puščico in uporabimo primeren del robotske
roke. Na koncu prikažemo vse možne smeri gibanja robotske roke. Na drugi sliki (Slika 5.2)
premike izvedemo sočasno. Roka se tako navidezno giblje po prostoru. Pri izrisu poti ne
skrijemo krivulje, pač pa jo z ukazom Loft samo pravilno povečujemo po poti, ki jo narišemo
tako, da se ujema z potjo vrha robotske roke.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
58
Pri izdelavi animacije, ki prikazuje premik kocke sočasno premikamo posamezne dele
robotske roke. Na vrhu je nameščeno zapestje, ki poskrbi za orientacijo prijemala. Tudi tu
vseskozi uporabljamo ukaz Link in tako omogočimo povezano rotiranje elementov zapestja v
pravilni položaj. Nato spreminjamo samo paramtre za premik glavne robotske roke v smeri
kocke.
Delovno okolje v 3DSM z izdelanimi elementi si lahko ogledamo na zgoščenki
\RobotskeRoke\PrenosKocke\KartezicnaRoka_1Lego.max. Animacijo pa na \Animacije\
RobotskeRoke\PrenosKocke\Avi\RobotskaRokaKartezicna_G1.avi.
Slika 5.3: Prijem predmeta s kartezično roko. Slika 5.4: Poravnava predmeta s kartezično roko.
Na primerni oddaljenosti od stojala se začno izvajati rotacije zapestja (Slika 5.3), ki
poskrbijo za pravilno orientacijo kocke. Kot že omenjeno je kocka vseskozi na vseh treh
točkah, vendar se spreminja njena vidnost. S pravilnim premikanjem vertikalnega in
horizontalnega dela nato kocko pripeljemo do kupa kock (Slika 5.4).
5.2 Cilindrična robotska roka
Je sestavljena iz enega rotacijskega sklepa in dveh translacijskih sklepov (oznaka RTT). Prvi
poskrbi za rotacijo okoli navpične osi, ostala dva pa za premik v navpični in vodoravni smeri
(Slika 5.5) tako se omogoči poljubni premik vrha r.r (Slika 5.6). Robotska roka tega tipa služi
za prenos teles večjih dimenzij [2].

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
59
Delovno okolje v 3DSM z izdelanimi elementi si lahko ogledamo na zgoščenki
\RobotskeRoke\SmeriGibanja\CilindricnaRobotskaRoka_1a.max. Animacijo pa na
\Animacije\RobotskeRoke\SmeriGibanja\Avi\RobotskaRokaCilindricna_R1a.avi.
Slika 5.5: Osnovne smeri cilindrične roko. Slika 5.6: Poljubna pot cilindrične roke.
Pri animaciji cilidrične roke uporabimo podoben postopek, vendar zaradi sprememb v
poziciji stolpa in različnih sklepov uporabimo drugačne vrednosti parametrov.
Delovno okolje v 3DSM z izdelanimi elementi si lahko ogledamo na zgoščenki
\RobotskeRoke\PrenosKocke\CilindricnaRobotskaRoka_1Lego.max. Animacijo pa na
\Animacije\RobotskeRoke\PrenosKocke\Avi\RobotskaRokaCilindricna_G1.avi.
Slika 5.7: Prijem predmeta s cilindrično roko. Slika 5.8: Poravnava predmeta s cilindrično roko.
Pri pozicioniranju prijemala naletimo na majhen izziv, saj moramo med približevanjem
vseskozi popravljati orientacijo zapestja, istočasno pa premikati vodoravni del roke (Slika
5.7). V zgornji animaciji postavimo stolp, kupček kock in vertikalni del robotske roke v isto
ravnino (Slika 5.8) in se tako izognemo problemu s popravljanjem razdalj in kotov. Kot drugo
rešitev nam 3DSM ponuja ukaz Bone, s katerim povežemo vse elemente skupaj, nato pa

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
60
celotna struktura sledi končni točki, ki se nahaja v prijemalu, vendar se ukaz zaplete pri
določanju poti, po katerih se gibljejo posamezni elementi.
5.3 Polarna robotska roka
Podobno kot pri roki RTT tudi tukaj nastopi rotacija okoli navpične osi. Namesto
drugega sklepa pa se postavi rotacijski sklep in tako poskrbimo za rotiranje okoli vodoravne
osi. Na koncu ostane še translacijski premik v smeri, ki jo narekujeta prejšnja dva sklepa. Vsi
trije (oznaka RRT) prav tako omogočajo dostopnost do vseh točk v prostoru (Slika 5.9). Ta tip
robotske roke se uporablja v strojni industriji. Natančnost se zmanjšuje z oddaljenostjo vrha
robotske roke od izhodišča [2]. Delovno okolje v 3DSM z izdelanimi elementi si lahko
ogledamo na zgoščenki \RobotskeRoke\SmeriGibanja\PolarnaRoka_1a.max. Animacijo pa na
\Animacije\RobotskeRoke\SmeriGibanja\Avi\RobotskaRokaPolarna_R1a.avi.
Slika 5.9: Osnovne smeri polarne roke. Slika 5.10: Poljubna pot polarne roke.
Upodobitev navidezne poti s krivuljo (Slika 5.10) zahteva nekoliko več truda. 3DSM
ne more povečevati (ukaz Scale) poljubno oblikovanega valja, ali odebeljene krivulje.
Problem nam je znan, rešitev pa smo že videli pri izdelavi motorja. Tudi sedaj se izkaže za
rešitev ukaz Loft, ki pa vseeno zahteva neko osnovno krivuljo. Nekoliko rotiran krog, ki smo
ga uporabili pri RTT roki, tu zaradi zapletenega gibanja ne pride v poštev. Rešitev nam
ponujajo sestavljeni deli krivulj, ki jih narišemo tako, da se ujemajo z gibanjem vrha roke.
Sledi še natančno ujemanje trenutkov v katerih se konča in začenja rešitev z ukazom Loft.
Delovno okolje v 3DSM z izdelanimi elementi si lahko ogledamo na zgoščenki
\RobotskeRoke\PrenosKocke\PolarnaRoka_1Lego.max. Animacijo pa na \Animacije\
RobotskeRoke\PrenosKocke\Avi\RobotskaRokaPolarna_G1.avi.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
61
Slika 5.11: Prijem predmeta s polarno roke. Slika 5.12: Poravnava predmeta s polarno roke.
Tudi tu se poslužimo rešitve z ujemanjem stolpa (Slika 5.11 in Slika 5.12), vertikalnega
dela roke in kupa kock. Kljub znanemu ukazu Bone raje uporabimo to rešitev, in tako
uporabimo podobno strukturo za vse animacije. V primeru zgoraj navedenga ukaza, bi namreč
prekinili povezovalni niz ukaza Link, kar pa ne želimo. Možno rešitev problema s
približevanjem bomo pobližje pogledali pri robotski roki SCARA.
5.4 SCARA robotska roka
Tudi tu gre podobno kot pri roki RTT in RRT, za rotiranje okoli navpične smeri, sledi
translacijksi sklep, ki skrbi za premik v navpični smeri, na koncu pa je ponovno rotacijski
sklep, kjer je os vrtenja vzporedna in zamaknjena glede na os vrtenja prvega rotacijkega
sklepa (oznaka RTR). Robotske roke tega tipa so narejene za reševanje problemov tipa luknje
– zatič. Zaradi osi, ki vse ležijo v isti smeri, se uporabljajo za montažna dela na vertikalni osi.
Natančnost pozicioniranja se zmanšuje s povečanjem razdalje med zapestjem in osjo prvega
rotacijskega zgloba. Osnovne osi gibanja so prikazane spodaj (Slika 5.13) [2].
Delovno okolje v 3DSM z izdelanimi elementi si lahko ogledamo na zgoščenki
\RobotskeRoke\SmeriGibanja\RokaSCARA_1a.max. Animacijo pa se nahaja na
\Animacije\RobotskeRoke\SmeriGibanja\Avi\RobotskaRokaScara_R1a.avi.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
62
Slika 5.13: Osnovne smeri SCARA roke. Slika 5.14: Poljubna pot SCARA roke.
Poljubna pot (Slika 5.14), ki jo opiše vrh robotske roke nam lahko služi za osnovno
izhodišče pri premikanju zapestja. Gibanje prijemala je nekoliko zapleteno zaradi
zamaknjenega stojala. V prvem koraku vrh robotske roke postavimo v smer, ki se seka z
navpično osjo kocke. Prijemalo z rotacijo zapestja postavimo v položaj, ki je na navpični osi
kocke. S premikom robotske roke v navpični smeri nato približamo prijemalo h kocki (Slika
5.15).
Slika 5.15: Prijem predmeta s SCARO roko. Slika 5.16: Poravnava predmeta s SCARA roko.
S ponovnim premikom v vertikalni smeri nato dvignemo kocko. Sledi poljuben premik
k stolpu. Nekje na sredi približevanja začnemo orientirati prijemalo. Slednjega namestimo tik
nad stojalo in nato s premikom robotske roke v vertikalni smeri nato natančno namestimo
kocko (Slika 5.16). Vidimo, da smo problem približevanja omejili na dve dimenziji in veliko
lažje rešili problem. S pravilnim časovnim proženjem posameznih premikov in rotacij nato
upodobimo navidezno krivo gibanje. Delovno okolje v 3DSM z izdelanimi elementi si lahko

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
63
ogledamo na zgoščenki \RobotskeRoke\PrenosKocke\RokaSCARA_1Lego.max. Animacijo
pa na \Animacije\RobotskeRoke\PrenosKocke\Avi\RobotskaRokaScara_G1.avi.
5.5 Členasta robotska roka
Vsi sklepi so rotacijski (oznaka RRR). Tako dobimo roko, ki je vrtljiva okoli navpične
in dveh vodoravnih osi (Slika 5.17). Če ne bi bilo mehanskih omejitev, bi delovni prostor
opisovala krogla. Ta oblika omogoča veliko prilagodljivost, kar nam pokaže tudi prikaz
poljubne poti (Slika 5.18). Slednjo upodobimo na podoben način, kot smo ga uporabili pri
RRT robotski roki. Velja opozoriti da je v temu primeru mogoče nekoliko olajšati delo, če na
prvem mestu narišemo krivuljo, ki upodablja pot in se nato lotimo rotiranja posameznih
sklepov. Na koncu pa glede na hitrost premikanja robotske roke določimo še parametre ukaza
Loft [2]. Delovno okolje v 3DSM z izdelanimi elementi si lahko ogledamo na zgoščenki
\RobotskeRoke\SmeriGibanja\ClenastaRobotskaRoka_1a.max. Animacijo pa se nahaja na
\Animacije\RobotskeRoke\SmeriGibanja\Avi\RobotskaRokaClenasta_R1a.avi.
Slika 5.17: Osnovne smeri členaste roke. Slika 5.18: Poljubna pot členaste roke.
Po namestitivi zapestja dobimo robota, ki je v celoti zgrajen iz rotacijskih sklepov. V
temu primeru ne moremo uporabiti rešitve, ki smo jo uporabili pri robotski roki SCARA.
Kljub temu si lahko pomagamo, če os srednjega rotacijskega sklepa pri zapestju postavimo
vzporedno z osjo navpičnega rotacijskega sklepa robotske roke. S tem si omogočimo, da na
lahek način izravnavamo njegove rotacije. Sedaj imamo dve navpični osi rotacije s čimer
lahko popravljamo razdaljo med prijemalom in kocko, ki jo narekujeta vodoravna rotacijska

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
64
sklepa robotske roke, katera sta uporabljena za določanje višine. Tako lahko izvedemo premik
kocke (Slika 5.19 in Slika 5.20).
Slika 5.19: Prijem predmeta s členasto roko. Slika 5.20: Poravnava predmeta s členasto roko.
Delovno okolje v 3DSM z izdelanimi elementi si lahko ogledamo na zgoščenki
\RobotskeRoke\PrenosKocke\ClenastaRobotskaRoka_1Lego.max. Animacijo pa na
\Animacije\RobotskeRoke\PrenosKocke\Avi\RobotskaRokaClenasta_G1.avi.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
65
6 Zaključek
Računalniška 3D animacija se izkaže kot dober način prikazovanja lastnosti
elektromotorjev in robotskih rok. V začetku gre ogromno časa za samo izdelavo modelov, ki
predstavljajo posamezne dele, potem pa sledi še izdelava animacije, ki je prav tako
dolgotrajna. Najboljša je široka možnost uporabe in hitro spreminjanje izgleda posameznih
sestavnih delov ali celotne animacije. Zlahka bi dodajali različne mehanske lastnosti, različna
bremena, spreminjali vrsto zapestja, hitrost in smer gibanja itd. Tako bi se lahko prilagajali
različni zahtevnosti učencev. Lahko bi upoštevali težo lastne konstrukcije, težo obdelovalnih
predmetov ali različne motnje pri pomikanju robotske roke. S tem bi prikazali različne
primere gibanj, učenec pa bi tako lahko s pogledom animacije izboljšal prostorsko predstavo
in se seznanil z zakonitostmi gibanja v 3D prostoru.
Izbrana programska oprema se je izkazala kot zelo dobro orodje za spoznavanje
risanja v 3D okolju, saj se spoznamo z osnovnimi principi, ki so podobni vsem resnim
programom za risanje v 3D. Argument dostopne dokumentacije se izkaže za pravilnega, saj si
tako močno olajšamo izdelavo. Zagotovo je 3D animacija zanimivejša za večji krog
uporabnikov, saj omogoča hitro učenje. Animacije se s pomočjo protokola VRML lahko
objavijo na svetovnem spletu, vendar smo zaenkrat omejeni s kontrolo nad njo. Pri razvoju
gremo lahko še korak dlje in oblikujemo glavne modele, ki so podobni gradnikom iz Fisher
ali Lego paketov. Tako bi lahko izrisali modele robotov in jih prikazali kot možne izvedbe, ki
jih učenci naredijo. V prihodnosti bo zagotovo zagotovljena manipulacija s posameznimi
parametri 3D animacije in tako bo mogoča izdelava 3D simulacije, ki bo lahko še dodatno
popestrila pouk. Izveden poskus z motorji pri pouku fizike bi lahko prikazali v 3D okolju, kjer
bi se spreminjali posamezni parametri istočasno pa bi se količine na pripadajočem grafu ali
kazalčnih diagramih spreminjale skladno s sliko, ki omogoča različne poglede. Vrtilno polje
bi se tako vrtelo skladno z nastavitvami, graf pa bi se temu ustrezno spreminjal. 3D animacija
pri dijakih lahko vzbudi nemalo radovednosti in sproži zanimanje za izdelavo animacij,
izgradnjo preprostega elektromotorja ali preproste robotske roke. Možnosti razvoja pa so
omejene samo z našo domišljijo.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
66
7 Literatura [1] Max von Laue, Kratka zgodovina fizike, Društvo matematikov, fizikov in astronomov,
Ljubljana, 1983.
[2] Kocijančič S.:Merjenje in krmiljenje z računalnikom, Študijsko gradivo za študente
pedagoške fakultete v Ljubljani. Ljubljana, 2001.
[3] Bozi K., Izdelava kakovostnih slik – diplomsko delo, Maribor, 2002.
[4] Hanžekovič D., Animacija hoje in teka navideznega človeka – diplomsko delo, Maribor,
2004.
[5] Fendt W.: Direct Current Electrical Motor [online]. <http://www.walter-
fendt.de/ph11e/electricmotor.htm> Obnovljeno 27.12.2002. Dostopno na svetovnem
spletu: <http://www.walter-fendt.de>
[6] School of Physics – The University of New South Wales [online]. Electric motors and
generators Dostopno na svetovnem spletu:
<http://www.physclips.unsw.edu.au/jw/electricmotors.html>
[7] Učni načrt za izbirni predmet Elektrotehnika: program osnovnošolskega izobraževanja,
Ministrstvo za šolstvo in šport, Zavod RS za šolstvo, 1.natis, Ljubljana, 2005.
[8] Učni načrt za izbirni predmet Robotika v tehniki: program osnovnošolskega
izobraževanja, Ministrstvo za šolstvo in šport, Zavod RS za šolstvo, 1.natis, Ljubljana,
2002.
[9] Cgsociety – Comparison of 3d tools
<http://wiki.cgsociety.org/index.php/Comparison_of_3d_tools> Obnovljeno
19.11.2007. Dostopno na svetovnem spletu <http://wiki.cgsociety.org>
[10] TDT3D – 3D applications 2007 comparisons table
<http://www.tdt3d.be/articles_viewer.php?art_id=99> Obnovljeno 7.11.2007. Dostopno
na svetovnem spletu <http://www.tdt3d.be>
[11] Kocijančič S., Elektrotehnika, Študijsko gradivo za študente Pedagoške fakultete v
Ljubljani, Ljubljana, 2001
[12] Ministrstvu za šolstvo in šport – e-OSNOVE ELEKTROTEHNIKE 1 (e-OET-1)
<http://eoet1.evsebine.com/material/eOet1_05_02_02.html>, Obnovljeno 30.12.2007.
Dostopno na svetovnem spletu < http://eoet1.evsebine.com >
[13] Žalar Z., Osnove elektrotehnike II, Tehniška založba Slovenije, Ljubljana, 2002.

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
67
[14] Educypedia - Motor and machines [online]
<http://www.educypedia.be/electronics/javamotor.htm> Obnovljeno 19.8.2007.
Dostopno na svetovnem spletu <http://www.educypedia.be>
[15] Programska oprema: 3D Studio Max 8, 2006
[16] Programska oprema: Adobe Premier v7.0
[17] Smith B., Foundation 3ds Max 8 Architectural Visualization, Friends of Ed, Berkeley
CA, 2006
[18] Adobe Systems Incorporated, Adobe Premiere Pro 2.0 Classroom in a Book, Adobe
Press, Berkeley CA, 2006
[19] http://www.wings3d.com
[20] http://www.artofillusion.org
[21] http://www.blender.org
[22] http://www.anim8or.com/
[23] http://www.rmdsoftware.com/
[24] http://www.newtek.com/
[25] http://www.maxon.net
[26] http://www.softimage.com/
[27] www.autodesk.com
[28] www.adobe.com

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
68
8 Priloge
Priloga 1: Časovna spremenljivost puščic na zanki in puščic na priključkih kolektorja.
(zgoščenka: \ElektroMotorji\EnosmerniEM_Osnovni\ EnosmerniEM_Osnovni.max)
Zgornja rumena puščica16 s smerjo navzdol, ki predstavlja silo inducirane napetosti.
• Časovno rotiranje puščice okoli osi X.
• Časovna odvisnost rasti puščice.
• Časovna odvisnost vidnosti puščice.
16 Glej opombo 14

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
69
Spodnja rumena puščica17 s smerjo navzgor, ki predstavlja silo inducirane napetosti.
• Časovno rotiranje puščice okoli osi X.
• Časovna odvisnost rasti puščice.
• Časovna odvisnost vidnosti puščice.
17 Glej opombo 14

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
70
Spodnja rumena puščica18 s smerjo navzdol, ki predstavlja silo inducirane napetosti.
• Časovno rotiranje puščice okoli osi X.
• Časovna odvisnost rasti puščice.
• Časovna odvisnost vidnosti puščice.
18 Glej opombo 14

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
71
Zgornja rdeča puščica19 s smerjo desno, ki predstavlja tok.
• Časovna odvisnost rasti puščice.
• Časovna odvisnost vidnosti puščice.
19 Glej opombo 14

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
72
Zgornja rdeča puščica20 s smerjo levo, ki predstavlja tok.
• Časovna odvisnost rasti puščice.
• Časovna odvisnost vidnosti puščice.
20 Glej opombo 14

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
73
Spodnja rdeča puščica21 s smerjo desno, ki predstavlja tok.
• Časovna odvisnost rasti puščice.
• Časovna odvisnost vidnosti puščice.
21 Glej opombo 14

A.Križaj. Animacije elektromotorjev in robotskih rok. Diplomsko delo.
74
Spodnja rdeča puščica22 s smerjo levo, ki predstavlja tok.
• Časovna odvisnost rasti puščice.
• Časovna odvisnost vidnosti puščice.
22 Glej opombo 14











