Embed Size (px)
Citation preview

1
Resumen—En este documento se expone el procedimiento de
modelado, resultados de índole eléctrico, magnético y mecánico,
análisis de resultados y conclusiones de un motor de inducción
jaula de ardilla tipo NEMA B de 1.1kW, conexión delta, 220 V,
simulado en el software de análisis por elementos finitos COMSOL
Multiphysics V5.3, en tres escenarios de falla de tipo cortocircuito.
El modelo simulado es validado mediante la comparación de
paramétricos eléctricos y mecánicos con resultados de pruebas
reales de un motor con características similares a las planteadas
en este documento, operando en condiciones normales (sin falla).
El mallado para la simulación mediante el método de elementos
finitos (MEF) está compuesto de 9295 dominios y 1671 límites, y
se utilizó el método Newton (constante) para resolver el modelo.
Dentro de los resultados obtenidos se puede recalcar que, de las
fallas analizadas, con los resultados más significativos, la falla
entre bobinas de fases diferentes es la que más repercute, ya que
disminuye en un 87.18 % en la velocidad normal de la máquina, y
se produce una oscilación del torque de entre 18.16 Nm y -56.37
Nm. Los resultados para falla de bobina a carcasa muestran que
los parámetros más afectados son el deslizamiento de la máquina
y el torque que tiene una oscilación de 49.68% por encima y de
58.8% por debajo del torque cuando la máquina opera sin falla.
La falla menos significativa es el cortocircuito entre bobinas de la
misma fase ya que los parámetros analizados no sufren grandes
cambios.
Index Terms—Motor de inducción, Fallas internas de
cortocircuito, COMSOL Multiphysics, Corriente de falla.
I. INTRODUCTION
L motor de inducción jaula de ardilla es una de las
máquinas eléctricas más versátiles debido a características
como el bajo costo de mantenimiento, alta confiabilidad, alta
eficiencia, alto par de arranque [1], siendo implementado en
alrededor del 70% de la industria global, principalmente en la
industria del transporte ferroviario y la industria extractiva de
recursos energéticos, consumiendo aproximadamente el 50%
de la energía producida en el planeta [2]. Pero quizá la
característica más destacada de esta máquina es la alta
tolerancia a las fallas de tipo cortocircuito, viéndose
comprometida sin embargo su eficiencia [3]. La persistencia de
estas puede acarrear desde el desgaste prematuro por una
inadecuada operación hasta su salida de servicio definitiva por
daños irreparables [4].
Dentro de la clasificación de las fallas de cortocircuito se
pueden encontrar cortocircuito entre una bobina y carcasa,
cortocircuito entre 2 bobinas y carcasa, cortocircuito entre
bobinas de 2 fases diferentes y cortocircuito entre bobinas de la
misma fase [5]. Detectarlas ayudaría no sólo a prevenir a tiempo
el colapso de la producción de una fábrica o la detención de la
actividad asignada a dicha máquina evitando pérdidas de
dinero, sino también daños secundarios a otros equipos de la red
eléctrica de la instalación a la cual se encuentren conectadas
dichas máquinas, por los efectos que estas fallas puedan tener
sobre la señal de corriente o de tensión del sistema [6]. Además
el futuro tendiente hacia la implementación de sistemas
inteligentes en las redes eléctricas que permita prevenir,
detectar y actuar ante fallas [7], hace que sea necesario tener
bajo supervisión una de las cargas más significativas del
sistema eléctrico del planeta y uno de los elementos clave en la
producción de la industria en general, que garantice su
funcionamiento bajo altos estándares de calidad.
En la actualidad la caracterización de las distintas fallas
eléctricas por cortocircuito implica tomar muestras físicas
reales de máquinas con fallas determinadas y no sólo analizar
las señales eléctricas sino también electromagnéticas, con el fin
de obtener parametrizaciones precisas [8] [9]. Pero el coste de
este proceso es alto, la toma de datos compleja, y es aquí donde
cabe hacer la pregunta: ¿Existe un método que permita
caracterizar, analizar y comparar electromagnéticamente las
fallas de tipo cortocircuito en un motor de inducción, así como
los efectos que dichas fallas pueden tener sobre la máquina de
manera precisa, confiable y a bajo costo?
Por lo anterior este documento pretende abrir una brecha en
investigación sobre fallas internas de cortocircuito en un motor
de inducción jaula de ardilla NEMA clase B [10], para lo cual
el documento se divide en secciones de la siguiente manera: en
la sección II se presentan las características eléctricas,
mecánicas, geométricas y de material del motor propuesto para
la simulación, en la sección III se detalla el proceso de
Análisis y parametrización de fallas internas de
cortocircuito eléctrico en un motor de
inducción, utilizando COMSOL Multiphysics
Aguilar Arévalo, David Alejandro, Puin Ávila, Harold David, Ortiz Suarez, Helmuth Edgardo
Ingeniería Eléctrica por Ciclos propedéuticos
Universidad Distrital Francisco José de Caldas
Bogotá D.C., Colombia
[email protected], [email protected], [email protected]
E

2
parametrización y modelado del motor en el software
COMSOL Multiphysics V5.3, en la sección IV se comparan los
resultados del motor en funcionamiento normal obtenidos con
el software y de manera real, en la sección V, VI y VII se
muestran los resultados de variables electromagnéticas y
mecánicas de la simulación del motor bajo las distintas fallas
propuestas, y finalmente el análisis de resultados y las
conclusiones se presentan en la sección VIII y IX
respectivamente.
II. CARACTERÍSTICAS DEL MOTOR MODELADO
A. Características técnicas del motor
Fig 1. Motor genérico NEMA clase B de 1.1KW.
Fuente: Elaboración propia de autores
El motor objeto de este estudio corresponde a un motor de
inducción trifásico Jaula de ardilla NEMA clase B de 1.1 KW
ilustrado en la Fig. 1, cuyas características se encuentran en la
Tabla I.
TABLA I. CARACTERÍSTICAS MOTOR OBJETO DE ESTUDIO.
Parámetro Unidad Valor
Tensión Δ/Y V 220 / 380
Corriente Δ/Y A 4.7 / 2.7
Frecuencia Hz 60
Potencia kW 1.1
Factor de potencia Φ - 0.9 Número de polos - 2
Velocidad nominal rpm 3350
Radio externo del estator cm 6.180 Radio interno del estator cm 3.622
Radio externo del rotor cm 3.522
Entrehierro mm 1 Número de ranuras del estator - 18
Área de ranura del estator mm2 48
Grosor del anillo en el rotor cm 2 Bobinas por grupo de fase - 3
Polos - 2
B. Materiales
Los materiales que componen cada sección del motor, según
se observa en el modelo bidimensional mostrado en la Fig. 2, se
definen en la Tabla II, haciendo especial énfasis en la curva de
magnetización del material del cual está compuesto el rotor y
estator de la máquina, presentada en la Fig. 3. Los materiales
seleccionados son típicos para motores de inducción jaula de
ardilla, y se toman materiales sin perdidas ya que ello no influye
en los resultados finales de la simulación, teniendo en cuenta la
potencia del motor objeto de estudio.
Fig 2. Geometría bidimensional del motor objeto de estudio.
Fuente: Elaboración propia de autores.
TABLA II. MATERIALES USADOS PARA EL MOTOR DE INDUCCIÓN EN
COMSOL.
Parte Material
Estator Hierro suave (Sin
pérdidas) Bobinas Cobre
Anillo del rotor Aluminio
Rotor Hierro suave (Sin
pérdidas)
Entrehierro Aire
Fig 3. Curva de magnetización del material ferromagnético del motor.
Fuente: Elaboración propia de autores.
C. Configuración de devanados
El estator de la máquina posee devanados de doble capa, dos
polos, 6 bobinas por fase, divididas en 3 bobinas por cada uno
de los dos grupos de fase, con un alcance de ranura (γ) de 20°
eléctricos, conectadas en serie tal como se observa en la Fig. 4.
y distribuidas en el estator de acuerdo a lo mostrado en la
Fig. 5.

3
Fig 4. Diagrama desarrollado para el estator del motor.
Fuente: Elaboración propia de autores.
Fig 5. Distribución por fase de las bobinas del motor.
Fuente: Elaboración propia de autores.
D. Circuito equivalente del motor
En la Tabla III se presentan los valores de ensayos para
determinar el modelo equivalente del motor objeto de estudio y
en la Fig. 6 se muestra el esquema de modelo de circuito por
fase del motor.
TABLA III. DATOS DE LAS PRUEBAS TIPO DEL MOTOR
Ensayo Parámetro Unidad Valor
Resistencia del
estator R Ω 15.23
Rotor bloqueado
Vrb V 96.1
Irb A 2.70
Prb W 281
Pérdidas mecánicas Pmec W 81.64
Vacío
Vo V 380.7
Io A 1.00 Po W 169
*Los parámetros fueron medidos con el motor en conexión Y.
Fig 6. Circuito equivalente por fase del motor.
Fuente: Elaboración propia de autores.
III. PROCEDIMIENTO DE MODELADO DEL MOTOR EN
COMSOL MULTIPHYSICS
A. Creación de la geometría
La geometría del motor se realizó en 2 dimensiones
implementando las herramientas de modelado del software,
combinado con el importado geométrico del estator, rotor y
devanados, realizados de manera previa. Se consolida el
modelo geométrico usando ensamblaje, el cual genera un par de
identidad con tolerancia de reparación de 1e-6, que separa la
zona dinámica de la zona estática de la máquina, como se
muestra en la Fig. 2.
B. Parámetros y variables
Inicialmente se definen los parámetros locales del modelo
como se presentan en la Tabla IV, los cuales permiten definir
ciertas variables del modelo en general.
TABLA IV. PARÁMETROS LOCALES DEFINIDOS PARA EL MODELO.
Nombre Expresión Valor Descripción
f0 60 [Hz] 60 Hz Frecuencia
w0 2*pi*f0 376.99 rad/s Frecuencia angular
n0 225 225 Número de vueltas de
bobinas
L 7.32 [cm] 0.0732 m Longitud del estator airgap 1 [mm] 0.001 m Entrehierro
La Tabla V muestra las variables que se establecen para todo
el modelo en general, entre ellas algunas expresiones que
definen el método matemático de Arkkio para el cálculo de
torque, el cual es una variación de la entidad algebraica del
tensor de maxwell usado en el análisis de elementos finitos [11],
el deslizamiento del motor definido a partir de la velocidad
mecánica y la carga que tiene asociada la máquina modelada
[11].
TABLA V. VARIABLES PARA EL MODELO GENERAL SIMULADO.
Nombre Expresión Unidad Descripción
I_rotor intop_inertia(rho_r*(X^2+
Y^2)*L) Kg m2
Inercia
mecánica del
rotor
T_Load 3.05 [Nm] Nm Torque de la
carga
r sqrt(X^2 + Y^2) m Distancia radial
dr airgap/2 m
Distancia radial
para integración
de torque
Bphi (-rmm.BX*Y + rmm.BY*X)/r
T
Densidad de
flujo magnético
azimutal
Br (rmm.BX*X + rmm.BY*Y)/r
T
Densidad de
flujo magnético
radial
T_ark intop_torque(r*L*Br*Bphi
/mu0_const/dr) Nm
Torque método
Arkkio
s (377[rad/s]-W)/377[rad/s] Deslizamiento
Para el modelo creado también fue necesario definir la
densidad de los materiales del hierro y del anillo del rotor, con
el objetivo de poder realizar una integración en dichos dominios
según el método matemático de Arkkio y los cuales se definen
según la Tabla VI. Los valores mostrados en la Tabla VI
representan la consistencia dada como densidad de los
materiales del rotor, los cuales son corresponden al hierro y al
4
aluminio por un factor K1 y K2 que tienen un valor de 19.109 y
15.556 respectivamente, y los cuales representan los esfuerzos
provocados por los rodamientos y pérdidas por fricción con el
viento. Estos valores fueron calibrados de acuerdo al tiempo de
estabilización de la máquina real, debido a que este parámetro
es de difícil cálculo analítico.
TABLA VI. CONSISTENCIA DE MATERIALES EN EL ROTOR.
Nombre Expresión Unidad Descripción
rho_r 7850 * K1 [Kg/m3] Kg/m3 Consistencia del hierro en el rotor
rho_r 2700 * K2 [Kg/m3] Kg/m3 Consistencia del
aluminio en el rotor
C. Configuración del módulo de máquinas rotativas
Este módulo es capaz de resolver ecuaciones de Maxwell
formuladas utilizando para su solución una combinación de
potencial magnético y escalar como variables dependientes.
Para el caso específico del estudio de este documento, el
módulo utiliza una discretización lineal para el vector de
potencial magnético y una discretización cuadrática para la
constante de potencial magnético. Se establecen dos dominios
de estudio de Ley de Ampere para el estator y rotor de la
máquina, configurados para que adopten un comportamiento
magnético de acuerdo a la curva de magnetización del material
ferromagnético asignado. De igual manera se establece un
dominio de velocidad prescrita asignado al rotor y anillo del
motor, asignando como ángulo de rotación a la variable phi, que
permitirá definir la velocidad de la máquina. Para los devanados
de la máquina se asignan 12 estudios de bobina de tipo múltiple
vuelta excitadas por corriente, para cada una de las fases. Las
ecuaciones generales del módulo se expresan por la ecuación
(1), ecuación (2) y ecuación (3) para el análisis de potencial
vectorial, y la ecuación (4) se utiliza para el análisis de potencial
escalar.
1) Formulación para potencial vectorial (Ley de
Ampere)
∇ × 𝐻 = 𝐽 (1)
𝐵 = ∇ × 𝐴 (2)
𝐸 = −𝛿𝐴
𝛿𝑡 (3)
2) Formulación para potencial escalar (Conservación
de flujo magnético)
∇ ∙ 𝐵 = 0 (4)
D. Configuración del módulo de circuitos eléctricos
Este módulo permite modelar potenciales eléctricos y
corrientes eléctricas en circuitos que incluyan elementos
básicos como fuentes de tensión, fuentes de corriente,
resistencias, condensadores, inductores y dispositivos
semiconductores. Este módulo define el circuito por fase del
motor de inducción modelado de acuerdo a los resultados
obtenidos en la sección II, Circuito equivalente del motor.
Conectadas en serie a dicho modelo se encuentran 12
resistencias de muy bajo valor óhmico por fase, cuya variable
de corriente se asigna como modo de excitación para los
dominios de bobina utilizados en la física de máquinas
rotativas. Este modelo de circuito eléctrico se conecta en
configuración delta a una fuente trifásica, que garantiza la
tensión nominal de energización del motor.
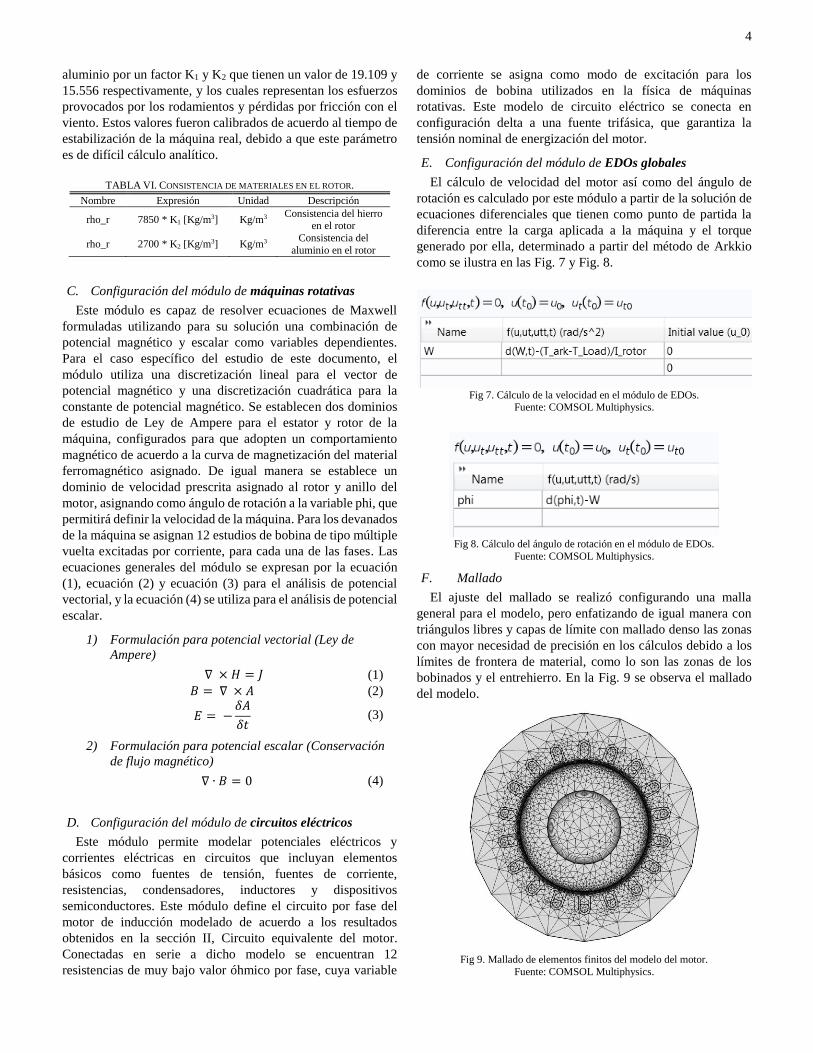
E. Configuración del módulo de EDOs globales
El cálculo de velocidad del motor así como del ángulo de
rotación es calculado por este módulo a partir de la solución de
ecuaciones diferenciales que tienen como punto de partida la
diferencia entre la carga aplicada a la máquina y el torque
generado por ella, determinado a partir del método de Arkkio
como se ilustra en las Fig. 7 y Fig. 8.
Fig 7. Cálculo de la velocidad en el módulo de EDOs.
Fuente: COMSOL Multiphysics.
Fig 8. Cálculo del ángulo de rotación en el módulo de EDOs.
Fuente: COMSOL Multiphysics.
F. Mallado
El ajuste del mallado se realizó configurando una malla
general para el modelo, pero enfatizando de igual manera con
triángulos libres y capas de límite con mallado denso las zonas
con mayor necesidad de precisión en los cálculos debido a los
límites de frontera de material, como lo son las zonas de los
bobinados y el entrehierro. En la Fig. 9 se observa el mallado
del modelo.
Fig 9. Mallado de elementos finitos del modelo del motor.
Fuente: COMSOL Multiphysics.

5
IV. VALIDACIÓN DEL MODELO SIMULADO DEL MOTOR
Una vez realizada la metodología de la sección III, los
resultados obtenidos por el software de COMSOL cuando el
motor de inducción opera a su carga nominal en estado normal
se muestran a continuación:
A. Corriente de fase en operación normal
Fig 10. Corriente de fase real y corriente de fase como resultado del modelado
en COMSOL.
Fuente: Elaboración propia de autores.
La Fig. 10 muestra el valor rms de la corriente de arranque
por fase en función del tiempo como parámetro real medido en
laboratorio y el resultado obtenido en el modelado en el
software de COMSOL Multiphysics. Allí se detalla un error
relativo en la corriente pico de arranque real versus simulada
del 16.91%; un error relativo de la corriente real versus
simulada en estado estacionario del 2.08%; y un error relativo
del tiempo de estabilización del corriente del 5.94%, donde el
criterio de estabilización se define a partir de una oscilación del
1% de los resultados obtenidos.
El error más grande obtenido se debe a la corriente pico de
arranque, debido a que dicha magnitud está condicionada a
parámetros mecánicos, eléctricos y térmicos que son difíciles
de considerar en el modelo simulado. Sin embargo, los
resultados obtenidos por la simulación en COMSOL resultan
ser un modelo apropiado para el objetivo planteado en este
documento.
B. Velocidad en operación normal
La Fig. 11 muestra la velocidad (desde el arranque hasta
plena marcha) del rotor real medida en el laboratorio y la
velocidad como resultado del modelado en COMSOL. Se
muestra un comportamiento similar tanto para su tiempo como
para su valor de estabilización, sin embargo, se puede apreciar
que su máxima desviación se encuentra a los 560 ms con un
error relativo del 5.00% y presentan un error de la velocidad de
estado estable del 0.88%.
Fig 11. Velocidad real y resultado del modelado en COMSOL.
Fuente: Elaboración propia de autores.
C. Deslizamiento en operación normal
Fig 12. Deslizamiento real y resultado del modelado en COMSOL.
Fuente: Elaboración propia de autores.
Las curvas de la Fig. 12 muestran el comportamiento del
deslizamiento (desde el arranque hasta plena marcha) asociado
a la máquina de inducción jaula de ardilla obtenidas a través de
la velocidad medida en laboratorio y los resultados de la
simulación en COMSOL. Debido a que el deslizamiento de la
máquina es un parámetro que deriva de la velocidad, su
comportamiento y características son similares a los analizados
para la velocidad.
D. Torque en operación normal
El torque al ser una variable dependiente de parámetros
electromagnéticos, mecánicos y constructivos tiene una fuerte
sensibilidad a la extrema precisión en cuanto al
comportamiento exhibido en el modelo simulado en COMSOL
y el comportamiento obtenido del motor real, siendo evidente
en el estado transitorio (arranque) como se observa en la Fig.
13. Es importante tener en cuenta que el torque del motor real
no fue obtenido de manera directa si no mediante la operación
de variables directas como la corriente de línea y la velocidad
lo cual le agrega de manera inherente un error e incertidumbre

6
en el cálculo. Sin embargo, a pesar de las diferencias obtenidas
en el estado transitorio, es de resaltar el comportamiento similar
del modelo simulado y el real en el estado estable, ya que este
presenta un error relativo del 2.64% para el torque real con
respecto a los resultados de COMSOL.
Fig 13. Torque real y resultado del modelado en COMSOL.
Fuente: Elaboración propia de autores.
E. Curva característica de torque Vs deslizamiento en
operación normal
Fig 14. Curva característica de torque versus deslizamiento real y resultado
del modelado en COMSOL. Fuente: Elaboración propia de autores.
El comportamiento de las curvas mostradas en la Fig. 14, se
derivan en parte por el análisis realizado para la curva de torque
en función del tiempo, sin embargo es relevante resaltar que el
valor pico para la curva característica real es de 7.55 Nm y para
la curva obtenida de los resultados de la simulación el valor
pico fue de 9.57 Nm.
A partir de los resultados anteriores obtenidos de corriente,
velocidad, deslizamiento y torque, consolidados en la Tabla
VII, se puede determinar que el modelado de la máquina de
inducción jaula de ardilla especificada según características
técnicas de la Tabla I en el software de COMSOL Multiphysics,
es una representación válida de dicha máquina, que permitirá
ser el pilar para realizar tres tipos de fallas internas de
cortocircuito en el estator, y determinar así con el software de
COMSOL algunos parámetros electromagnéticos relacionados
a dichos fenómenos.
TABLA VII. VALORES DE ESTADO ESTACIONARIO PARA EL MOTOR EN
OPERACIÓN NORMAL.
Variable Valor real Valor simulado Error
Corriente de
fase 2.5750 [Arms] 2.5214 [Arms] 2.08 %
Velocidad 3404.4[rpm] 3374.3 [rpm] 0.88 %
Deslizamiento 0.0583 0.0627 7.55 %
Torque desarrollado
3.2032 [Nm] 3.1332 [Nm] 2.18 %
V. SIMULACIÓN DE LA FALLA DE CORTOCIRCUITO
MONOFÁSICO
Las fallas se simularon en Comsol, no se realizará la falla en
el motor real debido a restricciones de uso de las máquinas en
el laboratorio (restricciones de seguridad de los equipos).
La Fig. 15 muestra el esquema de conexión eléctrica del
motor modelado objeto de este estudio el cual corresponde a
una conexión en triangulo, así como también muestra el punto
sobre el devano del estator donde se realiza la falla de bobina a
carcasa.
Fig. 15. Esquema eléctrico para la falla de bobina a carcasa.
Fuente: Elaboración propia de autores.
La falla realizada a continuación representa la pérdida de
aislamiento entre uno de los bornes del motor y la carcasa del
mismo, situación típica ocasionada por falta de mantenimiento
preventivo regular en ambientes con condiciones de trabajo
duras. Para todos los casos se simula la falla en t = 0.9s.
Fig. 16. Corriente eficaz por fase del motor, para la condición de falla bobina
a carcasa. Fuente: Elaboración propia de autores.

7
Fig. 17. Tensión eficaz por fase del motor, para la condición de falla bobina a
carcasa. Fuente: Elaboración propia de autores.
Fig. 18. Velocidad para la condición de falla bobina a carcasa.
Fuente: Elaboración propia de autores.
Fig. 19. Deslizamiento para la condición de falla bobina a carcasa.
Fuente: Elaboración propia de autores.
Fig. 20. Torque para la condición de falla bobina a carcasa.
Fuente: Elaboración propia de autores.
(a)
(b)
(c)
Fig. 21. Densidad y líneas de flujo magnético en la estructura del motor a los 0.6s (a), 1s(b) y 1.5s(c), cuando ocurre una falla de bobina a carcaza. Fuente: Elaboración propia de autores.
8
Para el caso de la simulación realizada en COMSOL, esta
contempla el arranque del motor en operación normal, y una
vez este se halla estabilizado para un tiempo transcurrido de 1
s, se activa una función paso con un valor alto en el orden de
gigas el cual está asociado de manera inversa a una resistencia
de bajo valor óhmico que ocasiona la falla. Los resultados de
corriente por fase (Fig. 16), tensión por fase (Fig. 17), velocidad
(Fig. 18), deslizamiento (Fig. 19), torque (Fig. 20) y densidad
de campo y flujo magnético (Fig. 21) se aprecian en las figuras
nombradas.
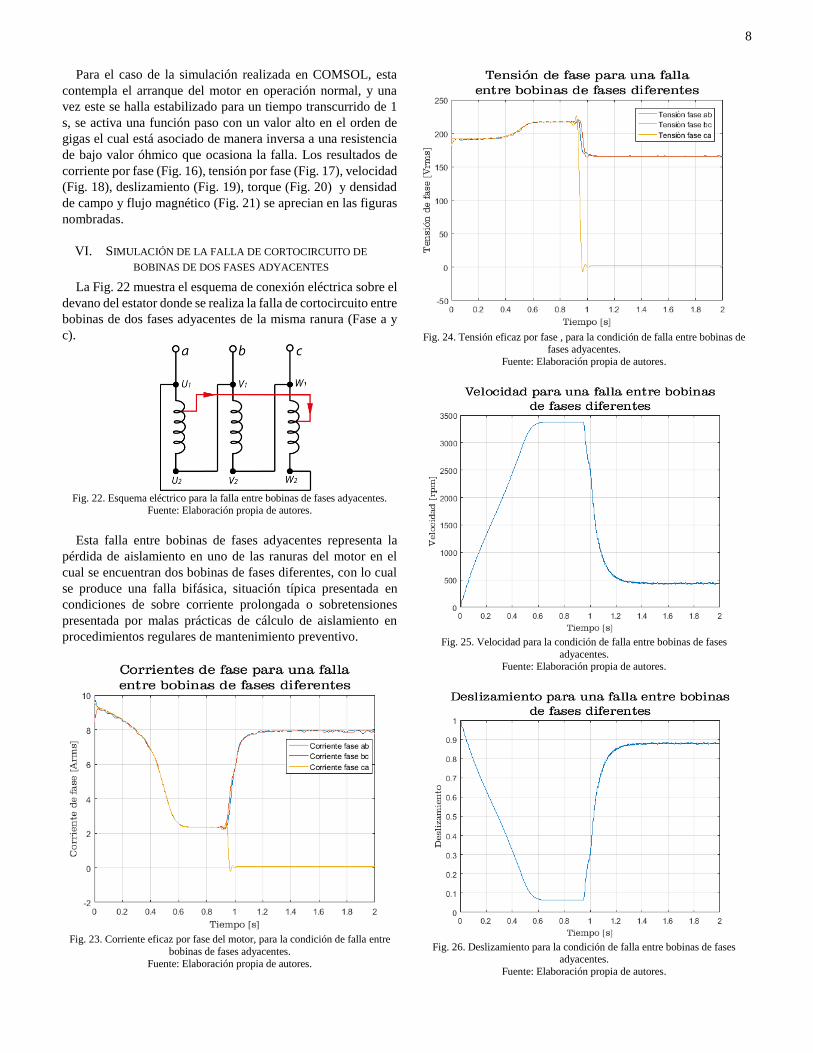
VI. SIMULACIÓN DE LA FALLA DE CORTOCIRCUITO DE
BOBINAS DE DOS FASES ADYACENTES
La Fig. 22 muestra el esquema de conexión eléctrica sobre el
devano del estator donde se realiza la falla de cortocircuito entre
bobinas de dos fases adyacentes de la misma ranura (Fase a y
c).
Fig. 22. Esquema eléctrico para la falla entre bobinas de fases adyacentes.
Fuente: Elaboración propia de autores.
Esta falla entre bobinas de fases adyacentes representa la
pérdida de aislamiento en uno de las ranuras del motor en el
cual se encuentran dos bobinas de fases diferentes, con lo cual
se produce una falla bifásica, situación típica presentada en
condiciones de sobre corriente prolongada o sobretensiones
presentada por malas prácticas de cálculo de aislamiento en
procedimientos regulares de mantenimiento preventivo.
Fig. 23. Corriente eficaz por fase del motor, para la condición de falla entre
bobinas de fases adyacentes.
Fuente: Elaboración propia de autores.
Fig. 24. Tensión eficaz por fase , para la condición de falla entre bobinas de
fases adyacentes.
Fuente: Elaboración propia de autores.
Fig. 25. Velocidad para la condición de falla entre bobinas de fases
adyacentes. Fuente: Elaboración propia de autores.
Fig. 26. Deslizamiento para la condición de falla entre bobinas de fases
adyacentes.
Fuente: Elaboración propia de autores.

9
(a)
(b)
(c)
Fig. 28. Densidad y líneas de flujo magnético en la estructura del motor a los 0.6s (a), 1s(b) y 1.5s(c), cuando ocurre una falla entre bobinas de fases adyacentes.
Fuente: Elaboración propia de autores.
El cortocircuito entre fases se realizó en la ranura número dos
en sentido horario, siendo la ranura superior la referencia
mostrada en la Fig. 5. Al igual que para la falla anterior, el
cortocircuito es realizado una vez que el motor se halla
estabilizado para un tiempo transcurrido de 1 s. Como resultado
de la simulación se obtiene la corriente por fase (Fig. 23),
tensión por fase (Fig. 24), velocidad (Fig. 25), deslizamiento
(Fig. 26), torque (Fig. 27) y densidad de campo y flujo
magnético (Fig. 28) que exhibe el motor con este tipo de falla.
Fig. 27. Torque para la condición de falla entre bobinas de fases adyacentes.
Fuente: Elaboración propia de autores.
VII. SIMULACIÓN DE LA FALLA DE CORTOCIRCUITO DE
BOBINAS DE LA MISMA FASE
Fig. 29. Esquema eléctrico para la falla entre bobinas de la misma fase.
Fuente: Elaboración propia de autores.
La Fig. 29 muestra el esquema de conexión eléctrica sobre el
devano del estator donde se realiza la falla de cortocircuito entre
bobinas de la misma fase.
Esta falla es representativa en bobinas de la misma fase (Fase
a) que comparten ranuras y que debido a sobre corrientes
prolongadas el aislamiento entre ellas se pierde de manera
parcial, con lo cual se realiza un cortocircuito leve y casi
indetectable pero que se puede ver reflejado en otros parámetros
del motor a largo tiempo.
El cortocircuito entre bobinas asociada a la misma fase se
realizó en la ranura superior mostrada en la Fig. 5, la cual
corresponde a la fase a. Esta falla se realizó bajo los mismo
parámetros explicados anteriormente, obteniendo como
resultado de la simulación la corriente por fase (Fig. 30),
tensión por fase (Fig. 31), velocidad (Fig. 32), deslizamiento
(Fig. 33), torque (Fig. 34) y densidad de campo y flujo
magnético (Fig. 35) que exhibe el motor con este tipo de falla.
Fig. 30. Corriente eficaz por fase del motor, para la condición de falla entre
bobinas de la misma fase.
Fuente: Elaboración propia de autores.

10
Fig. 31. Tensión eficaz por fase del motor, para la condición de falla entre
bobinas de la misma fase.
Fuente: Elaboración propia de autores.
Fig. 32. Velocidad para la condición de falla entre bobinas de la misma fase.
Fuente: Elaboración propia de autores.
Fig. 33. Desplazamiento para la condición de falla entre bobinas de la misma
fase.
Fuente: Elaboración propia de autores.
Fig. 34. Torque para la condición de falla entre bobinas de la misma fase.
Fuente: Elaboración propia de autores.
(a)
(b)
(c)
Fig. 35. Densidad y líneas de flujo magnético en la estructura del motor a los 0.6s (a), 1s(b) y 1.5s(c), cuando ocurre una falla entre bobinas de la misma fase.
Fuente: Elaboración propia de autores.

11
VIII. ANÁLISIS DE RESULTADOS
En la Fig. 16 se observan los resultados obtenidos en cuanto
a corriente por fase, siendo congruente con la falla de bobina
carcasa mostrada en la Fig. 17. La carcaza al estar conectada al
sistema de tierra de la instalación hace que en términos
prácticos sea una falla monofásica, y como resultado se tiene
que dos de las fases del motor se alimentan con una tensión de
fase de la fuente y solamente una de las fases se alimente a
tensión nominal debido a la conexión en Δ del motor, con lo
cual 2 de las corrientes tienen un valor más bajo, mientras que
la corriente de la fase que se alimenta a tensión nominal sube
para compensar la potencia demandada a la máquina por la
carga. Por lo anterior la fase con una mayor amplitud provoca
el mayor torque en el pico de dicha señal, mientras que las otras
fases al ser de menor amplitud provocan que el torque
disminuya, formando la oscilación que da resultado de la falla.
La disminución de potencia cuando ocurre la falla analizada
en la sección V es observable y contrastable en la densidad de
campo y líneas de flujo magnético de la Fig. 21, en la cual se
identifica que antes de la falla Fig. 21 (a), la densidad de campo
se distribuye de manera uniforme en el estator con un valor
medio de 0.89 T, de igual manera se observan las líneas de flujo
magnético concentradas tanto en el rotor como en el estator; sin
embargo, para el tiempo de análisis cuando ocurre la falla, como
después de la misma, Fig. 21 (b) y (c), la densidad presenta un
valor mínimo de 0.11 T y un valor máximo de 0.77 T
dependiendo de la fase de la que provenga su generación, de la
misma manera en que las líneas de flujo magnético se ven más
dispersas especialmente en el rotor.
TABLA VIII. COMPARACIÓN DE MAGNITUDES DE ALGUNAS VARIABLES
CUANDO OCURRE UNA FALLA BOBINA A CARCASA.
Variable Valor en
operación normal Valor en falla Diferencia
porcentual
Corriente de fase A
2.361 [Arms] 2.306 [Arms] 2.32 %
Corriente de
fase B 2.363 [Arms] 3.841 [Arms] 62.54%
Corriente de
fase C 2.369 [Arms] 2.243 [Arms] 5.31 %
Tensión de fase A
217.1 [Vrms] 123.9 [Vrms] 42.92 %
Tensión de fase
B 217.6 [Vrms] 209.1 [Vrms] 3.90 %
Tensión de fase
C 217.6 [Vrms] 121.4 [Vrms] 44.20 %
Velocidad 3373 [rpm] 3173 [rpm]
5.92 %
Deslizamiento 0.063 0.1187
88. 41 %
*Torque 3.204 [Nm] 4.796 [Nm] 1.320 [Nm]
49.68 %
58.80 %
*Los valores en falla para el torque oscilan entre un rango resultado de la
simulación.
La Tabla VIII muestra la alteración de los parámetros
analizados en la simulación como resultado de una falla de
cortocircuito entre bobina y carcasa; determinando que las
variables más afectadas en magnitud son la corriente en una de
las fases, la tensión asociada a dos de las fases que no se vieron
afectadas en su magnitud de corriente de forma drástica, el
deslizamiento de la máquina y el torque.
La Fig. 36 muestra que la corriente de falla pico en función
del tiempo analizada de bobina a carcasa, tiene un valor
máximo en estado estacionario aproximadamente de 91.51 A,
el cual equivale a un 33.89 veces mayor la corriente nominal
del motor analizado.
Fig. 36. Corriente de falla entre cortocircuito entre bobina y carcasa.
Fuente: Elaboración propia de autores.
La Fig. 24 muestra las tensiones de fase de alimentación del
motor jaula de ardilla operando con una falla de cortocircuito
de bobinas de fases adyacentes. En ella es evidente que una de
las fases queda directamente en corto, así como la corriente por
fase del motor que toma un valor de cero en la Fig. 23. Sin
embargo, los particulares valores de tensión que toman las otras
dos fases se deben a una diferencia de potencia de referencia a
la única fase sana.
TABLA IX. COMPARACIÓN DE MAGNITUDES DE ALGUNAS VARIABLES
CUANDO OCURRE UNA FALLA ENTRE BOBINAS DE FASES ADYACENTES.
Variable Valor en
operación normal Valor en falla Diferencia
porcentual
Corriente de fase A
2.348 [Arms] 7.934 [Arms] 237.90 %
Corriente de
fase B 2.351 [Arms] 7.934 [Arms] 237.47 %
Corriente de
fase C 2.356 [Arms] 0.075 [Arms] 96.81 %
Tensión de fase A
217.1 [Vrms] 165.5 [Vrms] 23.76 %
Tensión de fase
B 217.7 [Vrms] 165.5 [Vrms] 23.97 %
Tensión de fase
C 217.7 [Vrms] 1.565 [Vrms] 99.28 %
Velocidad 3375 [rpm] 432.6 [rpm]
87.18 %
Deslizamiento 0.062 0.879
1317.74 %
*Torque 3.245 [Nm] 18.16 [Nm]
- 56.37 [Nm] 459.63 %
1837.13 %
*Los valores en falla para el torque oscilan entre un rango resultado de la
simulación.
Los efectos de dicha falla sobre los parámetros mecánicos
son igualmente de considerables tanto en la velocidad como en

12
el torque; donde la velocidad reduce drásticamente su valor
como se muestra en la Fig. 25 debido a la falta de rotación
completa del campo electromagnético ya que la máquina se
comporta como si tuviera una fase abierta, y el torque se afecta
ya que las elevadas corrientes hacen que se generen una muy
alta densidad de campo magnético como se observa en la Fig.
28 (b) y (c) en comparación con la Fig. 28 (a) la cual se
encuentra en operación normal; lo anterior provoca que en el
rotor existan fuerzas electromagnéticas que frenan la máquina,
generando altos torques negativos.
La Tabla IX muestra el porcentaje de alteración de los
parámetros analizados en la simulación para la falla entre
bobinas de fases adyacentes; los valores allí indicados
demuestran que está es la falla con los cambios más drásticos
en todas las variables analizadas, incluyendo la densidad de
campo que se muestra en la Fig. 28.
Fig. 37. Corriente de falla entre cortocircuito entre bobinas de fases diferentes.
Fuente: Elaboración propia de autores.
La Fig. 37 muestra que la corriente de falla pico en función
del tiempo entre bobinas de fases diferentes, tiene un valor
máximo en estado estacionario aproximadamente de 80.91 A,
el cual equivale a 29.96 veces la corriente nominal del motor
objetivo de análisis.
La Fig. 30 muestra un incremento de la corriente en la fase
en que ocurre la falla de cortocircuito de bobinas de la misma
fase, ya que se disminuye casi que de manera significativa la
impedancia equivalente del devanado; como resultado las otras
fases también se elevan sus valores con el fin de compensar la
potencia perdida por las bobinas que se encuentran en corto,
esto tiene repercusiones de igual manera en aspectos mecánicos
de la máquina, siendo casi imperceptible para la velocidad
desarrollada, pero si más evidente en el torque, donde se
presenta un aumento del rizado producto de la desigualdad en
las corrientes. Este leve cambio del comportamiento del motor
también se observa en el ámbito electromagnético en donde se
observa un debilitamiento a penas observable en las líneas de
flujo magnético del motor en cuando ocurre la falla según se
muestra en la Fig. 35 (b) y (c), comparadas con las del motor
operando en condiciones normales Fig. 35 (a).
TABLA X. COMPARACIÓN DE MAGNITUDES DE ALGUNAS VARIABLES
CUANDO OCURRE UNA FALLA ENTRE BOBINAS DE LA MISMA FASE.
Variable Valor en
operación normal Valor en falla Diferencia
porcentual
Corriente de fase A
2.348 [Arms] 8.110 [Arms] 245.40 %
Corriente de
fase B 2.351 [Arms] 2.203 [Arms] 6.29 %
Corriente de
fase C 2.356 [Arms] 2.223 [Arms] 5.64 %
Tensión de fase A
217.2 [Vrms] 195.0 [Vrms] 10.22 %
Tensión de fase B
217.7 [Vrms] 211.3 [Vrms] 2.93 %
Tensión de fase
C 217.6 [Vrms] 213.3 [Vrms] 1.96 %
Velocidad 3375 [rpm] 3384 [rpm]
0.26 %
Deslizamiento 0.062 0.060
3.22 %
*Torque 3.232 [Nm] 4.037 [Nm]
2.309 [Nm] 24.91 %
28.56 %
*Los valores en falla para el torque oscilan entre un rango resultado de la
simulación.
La Tabla X muestra el porcentaje de alteración de los
parámetros de corrientes de fase, tensión de fase, velocidad,
deslizamiento y torque de la máquina de inducción cuando
ocurre en ella una falla entre bobinas de la misma fase; donde
los valores allí indicados demuestran que está es la falla que no
tienen cambios muy significativos a diferencias de los
resultados presentados para las anteriores fallas; sus parámetros
más representativos son la corriente de fase en la bobina donde
ocurre la falla la cual aumenta en un porcentaje de 245.40% con
respecto a la nominal y el torque que tiene una oscilación por
encima del 24.91% y una oscilación por debajo del 28.56% del
valor en estado estacionario sin falla, así como también se
observa y en la Fig. 35 que sus parámetros de densidad de
campo y líneas de flujo magnético no tienden a sufrir grandes
alteraciones que afecten la máquina por la prolongación de
dicha falla.
Fig. 38. Corriente de falla entre cortocircuito entre bobinas de la misma fase.
Fuente: Elaboración propia de autores.
La Fig. 38 muestra que la corriente de falla pico en función
del tiempo entre bobinas de la misma fase, tiene un valor

13
máximo en estado estacionario aproximadamente de 11.44 A;
siendo este tipo de falla analizada la que tiene menor impacto
con respecto a la falla entre bobinas de fases diferentes y entre
la falla de bobina y carcasa, ya que representa un aumento de
4.2 veces la corriente nominal del motor objetivo de análisis.
IX. CONCLUSIONES
Los resultados obtenidos del modelo del motor operando sin
fallas muestran un comportamiento similar al modelo real, en
variables como velocidad, corriente y deslizamiento en estado
transitorio de arranque y estado estacionario; el error más
considerable de las variables analizadas es el transitorio del
torque desarrollado, esto debido a que el comportamiento del
torque está asociado a características eléctricas, mecánicas y
magnéticas del motor, lo cual le adiciona un error implico por
la cantidad de variables asociadas y que son difíciles de modelar
en la simulación utilizada.
La falla de bobina a carcaza causa perturbaciones de
consideración al afectar en un 58.80 % el torque de la máquina
por rizado y al disminuir en un 5.92 % la velocidad del motor,
que es causado por una subtensión de alimentación en dos de
los tres devanados del motor.
Los resultados para la falla de cortocircuito de dos bobinas
de diferente fase, es una falla que causa perturbaciones
irreparables e inmediatas en ámbitos eléctricos, magnéticos y
mecánicos, causando la pérdida total de la máquina.
La falla de cortocircuito entre bobinas de la misma fase, es
una falla de difícil detección puesto que las perturbaciones
causadas a corto plazo no son reflejadas de manera significativa
en las variables mecánicas del motor, pero que largo plazo
puede causar daños irreparables a la máquina, por lo que se
aconseja tomar en análisis las señales eléctricas de la máquina
utilizando algoritmos complejos el análisis de señales frente a
cambios que no son tan significativos.
El método de elementos finitos desarrollado en este
documento es una alternativa económica, precisa y confiable
para el análisis de fallas en máquinas eléctricas y que se postula
como alternativa a los métodos convencionales de
determinación de parámetros ante fallas en máquinas eléctricas.
TRABAJO FUTURO
Como trabajo futuro se propone implementar en el software
de COMSOL Multiphysics el análisis de fallas para motores en
un determinado rango de potencia a partir de la parametrización
explicada en este documento; con el fin de consolidar una
fuente de información robusta de parámetros eléctricos,
mecánicos y magnéticos que permitan ser los datos de
entrenamiento para una máquina de soporte vectorial (SVM)
para la detección de tipo de falla en motores jaula de ardilla.
Adicional se propone realizar un modelo en tres dimensiones
del motor jaula de ardilla para el análisis de fallas de
cortocircuito en el software de COMSOL Multiphysics,
teniendo en cuenta que para ello se requiere un fuerte
procesamiento computacional como tiempo de simulación
debido a las físicas utilizadas, de tal manera que se pueda
consolidar de forma más detallada los resultados en este
documento.
REFERENCIAS
[1] S. Bindu and V. V Thomas, “Diagnoses of internal faults of
three phase squirrel cage induction motor - A review,” in
2014 International Conference on Advances in Energy
Conversion Technologies (ICAECT), 2014, pp. 48–54.
[2] J. Cusido Cusido, L. Romeral, J. a. Ortega, J. a. Rosero, and
A. Garcia Espinosa, “Fault Detection in Induction Machines
Using Power Spectral Density in Wavelet Decomposition,”
IEEE Trans. Ind. Electron., vol. 55, no. 2, pp. 633–643,
2008.
[3] T. International and E. Commission, “Technical note IEC
60034-2-1 standard on efficiency measurement methods for
low voltage AC motors .,” Direct, pp. 1–2, 2007.
[4] A. Boglietti, A. Cavagnino, M. Lazzari, and M. Pastorelli,
“International standards for the induction motor efficiency
evaluation: a critical analysis of the stray-load loss
determination,” IEEE Trans. Ind. Appl., vol. 40, no. 5, pp.
1294–1301, 2004.
[5] A. M. da Silva, R. J. Povinelli, and N. A. O. Demerdash,
“Induction Machine Broken Bar and Stator Short-Circuit
Fault Diagnostics Based on Three-Phase Stator Current
Envelopes,” IEEE Trans. Ind. Electron., vol. 55, no. 3, pp.
1310–1318, 2008.
[6] A. Paz Parra, J. L. Oslinger, and J. A. Palacios, “Diagnóstico
de fallas estatóricas en motores de inducción de jaula de
ardilla por medio de la corriente de secuencia negativa,” Ing.
y Univ., vol. 18, no. 1, pp. 141–158, 2014.
[7] S. E. Pandarakone, M. Masuko, Y. Mizuno, and H.
Nakamura, “Fault classification of outer-race bearing
damage in low-voltage induction motor with aid of fourier
analysis and SVM,” in 2018 IEEE International Conference
on Industrial Technology (ICIT), 2018, pp. 407–412.
[8] S. Nandi, H. A. Toliyat, and X. Li, “Condition monitoring
and fault diagnosis of electrical motors-a review,” IEEE
Trans. Energy Convers., vol. 20, no. 4, pp. 719–729, 2005.
[9] A. Bellini, F. Filippetti, C. Tassoni, and G. A. Capolino,
“Advances in Diagnostic Techniques for Induction
Machines,” IEEE Trans. Ind. Electron., vol. 55, no. 12, pp.
4109–4126, 2008.
[10] N. E. M. Association, NEMA Standards Publication MG 10-
2001 Energy Management Guide For Selection and Use of
Fixed Frequency. 2001, p. 26.
[11] N. Sadowski, Y. Lefevre, M. Lajoie-Mazenc, and J. Cros,
“Finite element torque calculation in electrical machines
while considering the movement,” IEEE Trans. Magn., vol.
28, no. 2, pp. 1410–1413, 1992.
[12] C. Multiphysics, C. Software, and L. Agreement, “Induction
Motor in 2D,” 2016.

14