-
UNIVERSIDAD POPULAR AUTNOMA DEL ESTADO DE PUEBLA
PLANEACIN ESTRATGICA Y DIRECCIN DE TECNOLGA
Anteproyecto
Anlisis de la implementacin de un
modelo de gestin de proyectos de
investigacin y de desarrollo
tecnolgico a una universidad
Autor: Arturo Serrano Hernndez
8 de Junio de 2015
-
Diseo de Mecanismo para el Control de Escaneo 3D
2
Resumen
Palabras clave:.
Abstrac
Key Words: .
-
Diseo de Mecanismo para el Control de Escaneo 3D
3
ndice
Resumen
.....................................................................................................................................
2
Abstrac
........................................................................................................................................
2
ndice de Tablas y Figuras
......................................................................................................
3
Introduccin
...........................................................................................................................
4
Planteamiento del problema
...............................................................................................
4
Justificacin
...........................................................................................................................
5
Objetivo
...................................................................................................................................
5
Objetivos especficos
.......................................................................................................
5
Alcances
.................................................................................................................................
5
Marco Terico
........................................................................................................................
6
Antecedentes
.....................................................................................................................
6
Mtodo
.....................................................................................................................................
7
Diagrama de Gantt
................................................................................................................
8
Conclusin
.............................................................................................................................
8
Glosario.......................................................................................................................................
9
Bibliografa
.................................................................................................................................
9
Anexos
......................................................................................................................................
10
ndice de Tablas y Figuras
Figura 1 Diagrama de Gantt con las actividades principales a
realizar............................... 8
-
Diseo de Mecanismo para el Control de Escaneo 3D
4
Introduccin
El presente proyecto se refiere al diseo de un mecanismo para
facilitar la tarea de escaneo en
tres dimensiones dentro de las instalaciones de la Universidad
Politcnica de Amozoc (UPAM).
Los escneres porttiles fueron creados para satisfacer las
necesidades de ingenieros y
profesionistas dedicados al desarrollo de productos y que se
encuentran en la constante bsqueda
de formas eficientes y fiables de realizar mediciones de objetos
fsicos (CREAFORM, 2015). Por lo
cual la UPAM tiene inters en el proyecto de forma profesional y
desde luego acadmico,
pudiendo generar as proyectos que ocupen consultora y a su vez
formando personal capacitado
en dichas actividades.
Una de las principales caractersticas de los escneres 3D, es su
portabilidad para la digitalizacin
en tres dimensiones bajo una plataforma intuitiva. Estos
sistemas de posicionamiento automtico
proporcionan una gua visual durante el proceso de digitalizacin,
pero es en esta etapa donde se
presentan los errores en la adquisicin de datos, ya que pese a
ser ligeros (1Kg) despus de
realizar diversas mediciones el usuario tiende a presentar
fatiga, perdiendo las referencias
automticas (natural features) proporcionadas por el equipo e
incluso sucede empleando las
objetivos reflejantes para posicionamiento (Positioning
targets).
La metodologa empleada para la realizacin satisfactoria de este
proyecto se divide en: 1)
Investigacin y anlisis (Documentacin), 2) Planificacin
(Identificacin de los requerimientos), 3)
Diseo (Modelado, Ensamble, Generacin de planos y explosionado,
Animacin, Simulacin de
fabricacin).
La estructura pues del proyecto se establece como:
- Captulo I planteamiento del problema, errores en la adquisicin
de datos en los escneres
en 3 dimensiones
- Capitulo II
- Capitulo III
- Capitulo IV
Planteamiento del problema
La idea del proyecto nace a partir del uso de un equipo de
escaneo 3D con prcticas con alumnos a
nivel licenciatura de la carrera de Ingeniera en Tecnologas de
Manufactura dentro de la
Universidad Politcnica de Amozoc, Puebla.
Al hacer uso del escner se han detectado errores en la
adquisicin de datos en el software, por lo
que los archivos obtenidos tienen que re-trabajarse para su uso
en otros procesos, siendo estos
errores provocados por el usuario.
-La formulacin del problema. -La formulacin de la pregunta de
investigacin.
-
Diseo de Mecanismo para el Control de Escaneo 3D
5
- Es viable o factible la investigacin que se propone? - Se
explica por qu es relevante la cuestin que se investiga? - Se seala
lo qu se pretende con la realizacin de la investigacin? - El
planteamiento del problema es congruente con los objetivos?
Reflective targets should be placed randomly on the object with
a minimal distance of 20 mm (0.75 in) between them. If you
encounter flat or curved surfaces, positioning target distance can
reach 100 mm (4 in) Positioning targets must be applied on plane
surfaces, with a minimum of 12 mm from the edges For the best 3D
scanning experience, white powder spray is recommended (creates a
matte finish)
Justificacin
La carrera de Ingeniera en Tecnologas de Manufactura en la
Universidad Politcnica de Amozoc
est planeada con el objetivo de aplicar los conocimientos
cientficos y tecnolgicos para mejorar
disear, implementar y automatizar procesos de manufactura, as
como evaluar y administrar
proyectos (UPAM, 2012).
Parte de estos conocimientos con tecnologa es aplicada en
metrologa que se relaciona con la
estandarizacin de los procesos de fabricacin, donde emplean
herramientas para medir cobrando
en ellos un importante papel en cualquier sistema de calidad
(Moro, 2000). Los escneres
porttiles han sido optimizados para satisfacer las necesidades
de ingenieros dedicados al
desarrollo de productos y que se encuentran constantemente a la
bsqueda de formas ms
eficaces y fiables de realizar mediciones en 3D de objetos
fsicos (CREAFORM, 2015).
De la informacin antes citada se puede resaltar el porqu del
proyecto. Al hacer hincapi en la
importancia de la calidad en los productos y la estandarizacin
en la fabricacin de los mismos,
empleado herramientas y procedimientos de medicin con precisin
para lograrlo.
Objetivo
Disear un mecanismo que apoye el manejo y control del escner 3D
el cual pretende reducir
(eliminar) las fallas u errores obtenidos al escanear una
pieza.
Objetivos especficos
Diseo 3d del mecanismo
Generacin de planos del mecanismo
Simulacin del funcionamiento del mecanismo
Simulacin del proceso de fabricacin de las distintas piezas que
componen el mecanismo
Alcances
Prototipo del mecanismo
Comparativa entre mtodos de escaneo (forma manual y forma
mecnica)
-
Diseo de Mecanismo para el Control de Escaneo 3D
6
Reducir fatiga en usuario
Mejorar precisin
Marco Terico
Antecedentes
Este apartado debera contemplar:
-Exposicin de la revisin de los antecedentes y del estado actual
de la cuestin que se quiere
abordar.
-Articulacin preliminar de una postura terica genuina del/de la
investigador/a en relacin con el
objeto de su investigacin
Manufactura, ingeniera y tecnologa
By Serope Kalpakjian, Steven R. Schmid, Ulises rev. tc Figueroa
Lpez
Pearson Educacin, 2002
Mexico Impreso en (Kalpakjian & Schmid, 2002)
Ventajas
1) Alta precision y repetibilidad.
2) Requiere pocas horas de trabajo.
3) Se pueden obtener con precision y fcilmente dimensiones y
distancias conociendo las coordenadas.
4) Robusta a fuerzas externas y evita acumulacion de errores
como un mal palpado por parte del operario.
Desventajas:
1) El alto coste de alguinas de las mquinas que existen en el
mercado.
2) Las mquinas de medidcion de coordenadas no son
portatiles.
3) En el caso de ser contralasdas por un PC, un problema con el
ordenador causa la parada de la maquina y es lento el reinicio del
sistema.
-
Diseo de Mecanismo para el Control de Escaneo 3D
7
Mediciones para aplicaciones de metrologa: precisin de un mximo
de 0,030 mm,
resolucin de un mximo de 0,050 mm, certificado de trazabilidad y
alta repetibilidad.
Precisin en condiciones reales: independientemente de las
condiciones del entorno,
configuracin del objeto o usuario. No requiere una instalacin
fija: se emplean
reflectores pticos para crear un sistema de referencia fijado a
la pieza en s, de manera que los usuarios puedan mover el objeto en
cualquier direccin durante una sesin de
digitalizacin (elaboracin de referencias dinmicas). Los cambios
del entorno no afectan
en absoluto la calidad y precisin de la adquisicin de datos.
Posicionamiento automtico:
el escner HandySCAN 3D es un sistema de adquisicin de datos que,
al mismo tiempo,
incorpora su propio sistema de posicionamiento. Esto significa
que no es necesario ningn
dispositivo de seguimiento o posicionamiento externo. Utiliza la
triangulacin para
determinar en tiempo real su posicin relativa en funcin del
objeto.
Mtodo
Nivel de investigacin
Este apartado, adems de lo precedente, debera contemplar:
-Participantes: explicacin del sistema de seleccin de
informantes y descripcin de las
caractersticas de la muestra seleccionada (por ejemplo: la edad,
el sexo, los estudios, el nivel
socioeconmico, etc.). Se debe justificar la adecuacin del nmero
de participantes en el estudio,
la pertinencia de su seleccin en funcin de los objetivos de la
investigacin, etc.
-Material: descripcin preliminar de los instrumentos que se
utilizarn, el procedimiento que se
emplear para su construccin, su adecuacin, la utilizacin de
materiales o documentos, etc.
-Procedimiento: exposicin de la manera de ejecucin de las
acciones o etapas que deberan
conducir al desarrollo y a la culminacin del trabajo
metodolgico.
-Plan de anlisis de los resultados: en base a los objetivos
planteados, deberan explicitarse que
tipo de anlisis se aplicar y, eventualmente, si se emplear
alguna herramienta especfica (por
ejemplo, un determinado software).
Algunas preguntas que es oportuno hacerse:
-Se especifica proceso de investigacin?
-Se justifica la eleccin de mtodos y tcnicas?
-Se mencionan los mtodos que se utilizarn?
-Se hace referencia a las tcnicas que se utilizarn?
-Se caracterizan los/as participantes?
-Se explicita el plan de anlisis?
-
Diseo de Mecanismo para el Control de Escaneo 3D
8
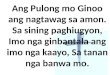
Diagrama de Gantt
Se construye un diagrama de barras en el que se muestran las
distintas actividades a realizar, as
como su duracin (Torres & Torres, 2014).
El proyecto es producto de una necesidad, pero a su vez es
acotado para su realizacin dentro de
las actividades del curso de Diseo y Manufactura Asistida por
Computadora. El cual da inicio a
partir del 14 de abril y culmina el 19 de mayo con la
presentacin de la propuesta.
Semana 1 Semana 2 Semana 3 Semana 4
Semana 5 Semana 6
Diseo 3D
Mecanismo Del 13 al 30 de abril
Generacin
Planos Del 27 al 30
abril
Animacin
movimiento 27 de abril al 8 de mayo
Simulacin
Fabricacin Del 4 al 15 de mayo
Presentacin 18 al 19 de mayo
Figura 1 Diagrama de Gantt con las actividades principales a
realizar
Conclusin
El problema se produce debido al peso del equipo de escaneo, se
entiende su importancia en la
aplicacin de ingeniera inversa as como en diseo mismo.
El mecanismo diseado pretende eliminar las fallas en la
adquisicin de datos al escanear las
distintas piezas y mitigar la fatiga del usuario.
El proyecto tiene la limitante de poder escanear solo bajo
ciertas dimensiones las piezas, a
diferencia del diseo original cuyo objetivo fue que las
dimensiones no representasen un
problema.
La solucin propuesta del mecanismo se ajusta a la realizacin de
prcticas de laboratorio dentro
de la Universidad Politcnica de Amozoc con piezas
preestablecidas con dimensiones por debajo
del lmite de la base del mecanismo y siempre con la opcin de
liberar o desensamblar el escner
mismo dando una opcin muy viable de aplicacin del mecanismo
propuesto.
-
Diseo de Mecanismo para el Control de Escaneo 3D
9
Glosario
Bibliografa
(s.f.).
CREAFORM. (2015). CREAFORM SOLUCIONES DE MEDICIN 3D PORTTILES.
Recuperado el 29 de
04 de 2015, de http://www.creaform3d.com/
Kalpakjian, S., & Schmid, S. (2002). Manufactura, Ingeniera
y Tecnologa. Mxico: Pearson.
Moro, M. (2000). Metrologa: Introcuccin conceptos e
instrumentos. Espaa: Universidad de
Oviedo.
Ramirez Ortegn, J. (01 de 2009). Formato de anteproyecto de
investigacin. Escrcega,
Campeche, Mxico: Instituto Tecnolgico Superior de Escrcega.
TECNIMETAL. (04 de 03 de 2014). Tcnicas de Medida y Metalografa.
Recuperado el 01 de 05 de
2015, de Ventajas y desventajas de una mquina de medicin por
coordenadas:
http://maquinasdemedicionporcoordenadas.com
Torres, Z., & Torres, H. (2014). Administracin de proyectos.
Mxico, DF.: Patria.
UPAM. (2012). Universidad Politcnica de Amozoc. Recuperado el 21
de 04 de 2015, de
http://www.upamozoc.edu.mx/manufactura.html
ndice General
-
Diseo de Mecanismo para el Control de Escaneo 3D
10
Anexos
http://www.aceroschulavista.com/Contenido2.html#slide-5
A) Planos
-
Diseo de Mecanismo para el Control de Escaneo 3D
11
Propuesta de Plan de Estudios
CLAVE CRDITOS ASIGNATURA
DESARROLLO HUMANO
HUM560 7 Liderazgo y Misin de Servicio
HUM542 6 Integracin Humana
ESTRATEGIAS EMPRESARIALES
CLAVE CRDITOS ASIGNATURA
ADM551 7 Planeacin Global Estratgica
ADM552 7 Productividad y Competitividad Internacional
ADM553 7 Direccin de Empresas Sustentables
DCI523 6 Innovacin y Creatividad Disruptiva
ORG552 7 Teora, Estructura y Procesos Organizacionales
MER555 7 Estrategias de Comercializacin
INGENIERA E INNOVACIN TECNOLGICA
ING551 7 Estrategias Tecnolgicas
ING555 7 Modelos de Innovacin Tecnolgica
ING552 7 Estrategias de Calidad
ING553 6 Transformacin Empresarial Esbelta
ING550 7 Planeacin y Evaluacin Integral de Proyectos
BIO567 7 Red Neuronales Artificiales
METODOLOGA DE ANLISIS DE DECISIONES
MAD553 7 Anlisis de Procesos de Decisiones
MAD551 7 Modelacin Empresarial
MAD552 7 Sistemas de Simulacin
MAD550 7 Diseo de Experimentos y Superficies de Respuesta
MAD554 7 Investigacin de Operaciones
LOGSTICA Y DIRECCIN DE LA CADENA DE SUMINISTRO
CLAVE CRDITOS ASIGNATURA
LOG552 7 Cadena de Suministro Sustentable
-
Diseo de Mecanismo para el Control de Escaneo 3D
12
LOG551 7 Anlisis y Diseo de Sistemas de Produccin
TECNOLOGAS DE INFORMACIN Y COMUNICACIN
ITI561 7 Sistemas Empresariales
ISW553 7 Ingeniera de Usabilidad
SISTEMAS INTEGRADOS DE MANUFACTURA
MAN580 7 Sistemas Integrados de Manufactura
MAN571 7 Diseo y Manufactura Asistida por Computadora
ECONOMA Y FINANZAS
DES552 7 Microeconoma de la Competitividad
ECO557 7 Finanzas Internacionales
ECO552 7 Finanzas Corporativas
ECO570 7 Econometra
MER551 7 Investigacin de Mercados
SEMINARIOS DE INVESTIGACIN
INV630 6 Seminario de Actualizacin
INV631 6 Seminario de Innovacin
INV632 6 Seminario de Integracin
INVESTIGACIN
TED113 5 Protocolo Doctoral
TED114 5 Investigacin Doctoral
TED101 10 Tesis Doctoral I
TED102 10 Tesis Doctoral II