Embed Size (px)
Citation preview

UNIVERSIDAD CARLOS III DE MADRID
Departamento de Ingeniería Mecánica
Aplicación de la lógica difusa para detección de defectos en rodamientos
INGENIERÍA INDUSTRIAL
PROYECTO FIN DE CARRERA
Autor: Jesús Hernández Solano Tutor: Cristina Castejón Sisamón

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
1

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
2
Me gustaría aprovechar la ocasión para dar las gracias a todas las personas
que han hecho posible este proyecto.
En primer lugar me gustaría recordar a los compañeros que me han
acompañado a lo largo de este camino: Alberto, Nacho, Javier , Juan, Pablo, Nico…ha
sido un placer aprender con vosotros, pero sobre todo de vosotros.
Gracias a todos los profesores que han contribuido en mi formación académica
y personal, y en especial a mi directora del proyecto, Cristina Castejón, por toda su
paciencia y dedicación.
Pero sobre todo, quiero agradecer enormemente a mis padres, a mi hermano
Adri y a Paula, por que han confiado siempre e incondicionalmente en mí y han
sacrificado mucho para que yo consiga siempre lo que me propongo.
Sin su apoyo habría sido imposible llegar hasta aquí.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-INDICE- 3
ÍNDICE 1. INTRODUCCIÓN .................................................................................................... 9
1.1 OBJETIVO DEL PROYECTO ....................................................................... 10
1.2 DESCRIPCIÓN Y ORGANIZACIÓN DEL PROYECTO ............................. 11 2. MARCO TEÓRICO DEL PROYECTO. ............................................................... 13
2.1 RODAMIENTOS Y SUS CARACTERÍSTICAS ........................................... 13 2.2 FRECUENCIAS NATURALES DE BOLA Y PISTA ................................... 17 2.3 OBTENCIÓN ANALÍTICA DE LAS FRECUENCIAS NATURALES DE FALLO EN UN RODAMIENTO .............................................................................. 18
2.3.1 FRECUENCIA FUNDAMENTAL DEL TREN DE ELEMENTOS (FTF) 19
2.3.2 FRECUENCIA DE PASO DE LAS BOLAS POR LA PISTA EXTERIOR (BPFO) 20 2.3.3 FRECUENCIA DE PASO DE LAS BOLAS POR LA PISTA INTERIOR (BPFI) 21 2.3.4 FRECUENCIA DE GIRO DE LAS BOLAS (BSF) .................................... 22 2.4 RESUMEN DE FRECUENCIAS NATURALES DE FALLO EN UN RODAMIENTO ......................................................................................................... 23 2.5 MODELO DE VIBRACIÓN PARA UN RODAMIENTO CON DEFECTO LOCALIZADO .......................................................................................................... 24 2.5.1 CONSIDERACIONES PARA EL MODELO ............................................. 24 2.5.2 DESARROLLO DEL MODELO ................................................................ 25
2.6 FACTORES CAUSANTES DE DEFECTOS EN RODAMIENTOS. ........... 29 2.7 TIPOS DE DEFECTOS EN RODAMIENTOS. ............................................. 32
2. 8 PROCESAMIENTO DE LA SEÑAL. ............................................................ 37
2. 8.1 EL DOMINIO DE LA FRECUENCIA. ...................................................... 37
2. 8.2 LA TRANSFORMADA DE FOURIER. ..................................................... 38
2. 8.3 SHORT TIME FOURIER TRANSFORM (STFT) ..................................... 39 2.8.4 TRANSFORMADA DE HILBERT............................................................. 42
2.9 FUNDAMENTOS DE LÓGICA DIFUSA ..................................................... 43
2.9.1 CONJUNTOS DIFUSOS Y FUNCIONES DE PERTENENCIA ............. 45 2.9.2 INFERENCIA DIFUSA ............................................................................... 47
2.9.3 DIAGRAMA DE BLOQUES DE UN SISTEMA DE CONTROL BASADO EN LÓGICA DIFUSA. .............................................................................................. 48 2.9.4 MECANISMOS DE INFERENCIA. ........................................................... 49
2.9.5 MÉTODOS DE DESDIFUSIÓN ................................................................. 52
3. SISTEMA EXPERIMENTAL ............................................................................... 53
3.1 INTRODUCCIÓN. .......................................................................................... 53
3.2 EQUIPO DE ENSAYO ................................................................................... 53
3.3 ADQUISICIÓN DE DATOS ........................................................................... 55
3.4 NOMENCLATURA DE LAS SEÑALES UTILIZADAS. ............................. 56 4. DESARROLLO DEL PROYECTO ....................................................................... 58
4.1 INTRODUCCIÓN ........................................................................................... 58
4.2 PROCESAMIENTO DE LAS SEÑALES ...................................................... 59
4.2.1 ANÁLISIS DE LA SEÑAL MEDIANTE LA TRANSFORMADA RÁPIDA DE FOURIER ............................................................................................................. 60 4.2.1.1 RODAMIENTO SIN DEFECTO ............................................................. 60
4.2.1.2 RODAMIENTO CON DEFECTO EN BOLA ......................................... 62 4.2.1.3 RODAMIENTO CON DEFECTO EN PISTA INTERNA ...................... 64 4.2.1.4 RODAMIENTO ON DEFECTO EN PISTA EXTERNA. ...................... 66

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-INDICE- 4
4.2.1.5 CONCLUSIONES DEL USO DE LA REPRESENTACIÓN TEMPORAL Y LA TRANSFORMADA DE FOURIER. ............................................................... 68
4.2.2 TRANSFORMADA DE HILBERT............................................................. 68
4.2.2.1 RODAMIENTO SIN DEFECTO ............................................................. 68
4.2.2.2 RODAMIENTO CON DEFECTO EN BOLA ......................................... 72 4.2.2.3 RODAMIENTO CON DEFECTO EN PISTA INTERNA ...................... 75 4.2.2.4 RODAMIENTO CON DEFECTO EN PISTA EXTERNA ..................... 78 4.2.2.5 CONCLUSSIONES DEL USO DE LA TRANSFORMADA DE HILBERT. 80
4.3 CLASIFICADOR BASADO EN LÓGICA DIFUSA. .................................... 82 4.3.1 INTRODUCCIÓN. ...................................................................................... 82
4.3.2 EDITOR DE CLASIFICADORES DIFUSOS (FIS EDITOR) ................... 82 4.3.3 EDITOR DE FUNCIONES DE PERTENENCIA (MEMBERSHIP FUNCTION EDITOR) ............................................................................................... 84 4.3.4 CREACIÓN DE FUNCIONES DE PERTENENCIA PARA LAS VARIABLES DE ENTRADA. .................................................................................. 86
4.3.5 CREACIÓN DE FUNCIONES DE PERTENENCIA PARA LAS VARIABLES DE SALIDA, AGREGACIÓN LÓGICA Y DESDIFUSIÓN. ........... 88 4.3.6 EDITOR DE REGLAS DIFUSAS (RULE EDITOR). ................................ 90 4.3.7 REGLAS DIFUSAS ..................................................................................... 92
4.3.8 RESULTADOS OBTENIDOS CON EL CLASIFICADOR DIFUSO. ...... 93 4.4 CLASISFICADOR DIFUSO INDEPENDINTE DE LA VELOCIDAD ........ 99 4.4.1 INTRODUCCIÓN ............................................................................................. 99 4.4.2 RESULTADOS OBTENIDOS .................................................................. 101
4.5 DESARROLLO DE UN INTERFAZ GRÁFICO PARA LA DETECCIÓN DE DEFECTOS EN RODAMIENTOS.......................................................................... 115
4.5.1 INTRODUCCIÓN ........................................................................................... 115 4.5.2 DISEÑO DE UNA GUI ............................................................................. 115
5 CONCLUSIONES Y FUTUROS DESARROLLOS ........................................... 124
5.1 CONCLUSIONES .............................................................................................. 124 5.2 FUTUROS DESARROLLOS ............................................................................ 127
6 BIBLIOGRAFÍA .................................................................................................. 128 7 ANEXOS .............................................................................................................. 130
7.1 HOJA DE CARACTERÍSTICAS DEL RODAMIENTO. ................................ 130
7.2 HOJA DE CARACTERÍSTICAS DEL ACELERÓMETRO. ........................... 131 7.3 REGLAS DIFUSAS UTILIZADAS .................................................................. 132

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-INDICE- 5
INDICE DE TABLAS Tabla 1 Amplitud y periodicidades de la función α(t) con respecto a la ubicación del defecto ............................................................................................................................ 27
Tabla 2 Frecuencias de variación de los pulsos [6] ........................................................ 28 Tabla 3 Tipos de desgaste: descripción, causas y acción correctiva [8]........................ 32
Tabla 4 Principales campos de aplicación de la lógica difusa en la industria ................ 43
Tabla 5 Probabilidad vs Difusividad [13] ..................................................................... 44 Tabla 6 Tablas clásicas de verdad para los operadores lógicos AND, OR y NOT ........ 50
Tabla 7 Tablas de verdad para lógica difusa ................................................................. 51 Tabla 8 Características rodamiento ER10K ................................................................... 55 Tabla 9 Muestras necesarias para cada velocidad de giro .............................................. 56
Tabla 10 Frecuencias naturales de fallo para cada frecuencia de giro ........................... 58
Tabla 11 Frecuencias naturales de fallo entre frecuencia de giro .................................. 59
Tabla 12 Posición de los 5 picos de frecuencia más importantes. Rodamiento con defecto en bola a 30 Hz .................................................................................................. 73 Tabla 13 Análisis de frecuencias de la señal B-30-50000-3 .......................................... 74
Tabla 14 Análisis de frecuencias I-30-50000-3 .............................................................. 77 Tabla 15 Análisis de frecuencias O-30-50000-3 ............................................................ 80 Tabla 16 Frecuencias encontradas mediante transformada de Hilbert ........................... 81
Tabla 17 Frecuencias naturales de fallo entre 90 y 300Hz ............................................ 86
Tabla 18 Resultados para el rodamiento con fallo en bola (30Hz) ................................ 95
Tabla 19 Resultados para el rodamiento con fallo en pista externa (30Hz) .................. 96
Tabla 20 Resultados para el rodamiento con fallo en pista interna (30Hz) ................... 97
Tabla 21 Resultados para el rodamiento con fallo en buenas condiciones (30Hz) ........ 98
Tabla 22 Tasa de aciertos para el clasificador difuso para rodamientos a velocidad de 30 Hz ................................................................................................................................... 99
Tabla 23 Funciones de pertenencia para el clasificador independiente de la velocidad ...................................................................................................................................... 100
Tabla 24 Resultados para el rodamiento con fallo en pista interna (30Hz) .................. 102
Tabla 25 Resultados para el rodamiento con fallo en bola (30Hz) .............................. 103
Tabla 26 Resultados para el rodamiento con fallo en pista externa (30Hz) ................. 104
Tabla 27 Resultado para el rodamiento en buenas condiciones (30Hz) ....................... 105
Tabla 28 Resultados para el rodamiento con fallo en pista interna (20Hz) .................. 106
Tabla 29 Resultados para el rodamiento con fallo en pista externa (20Hz) ................. 107
Tabla 30 Resultados para el rodamiento con fallo en bolas (20Hz) ............................. 108
Tabla 31 Resultados para el rodamiento en buenas condiciones (20Hz) ..................... 109
Tabla 32 Resultados para el rodamiento con fallo en pista interna (10 Hz) ................. 110
Tabla 33 Resultados para el rodamiento con fallo en la pista externa (10Hz) ............. 111
Tabla 34 Resultados para el rodamiento con fallo en bola (10Hz) .............................. 112
Tabla 35 Resultado para el rodamiento en buenas condiciones (10Hz) ....................... 113
Tabla 36 Tasas de acierto para el rodamiento a 30 Hz ................................................. 114
Tabla 37 Tasas de acierto para el rodamiento a 20 Hz ................................................. 114
Tabla 38 Tasas de acierto para el rodamiento a 10 Hz ................................................. 114

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-INDICE- 6
INDICE DE ILUSTRACIONES Ilustración 1 Esquema del desarrollo del proyecto ......................................................... 11 Ilustración 2 Rodamiento de una hilera de bolas con contacto angular ......................... 14
Ilustración 3 Condiciones de lubricación [1] .................................................................. 17 Ilustración 4 Vista frontal y transversal de un rodamiento de bolas [3] ......................... 19
Ilustración 5 Modelo de rodamiento excitado por un defecto localizado en pista externa [5] ................................................................................................................................... 26
Ilustración 6 Distribución de carga radial para un rodamiento [6] ................................. 28
Ilustración 7 Factores que provocan defectos en rodamientos ...................................... 29
Ilustración 8 Rodamiento con corrosión ......................................................................... 31 Ilustración 9 Rodamiento con desgaste producido por partículas abrasivas .................. 32
Ilustración 10 Rodamiento con desgaste producido por problemas de lubricación ....... 33
Ilustración 11 Rodamientos con desgaste producido por problemas de vibración para rodamiento de rodillos y bolas respectivamente............................................................. 33 Ilustración 12 Rodamiento con indentación debida a montaje inapropiado ................... 34
Ilustración 13 Rodamiento con indentación debida a partícula abrasiva. ...................... 34
Ilustración 14 Secuencia del fenómeno flaking. ............................................................. 35 Ilustración 15 Rodamiento con Smearing en su pista exterior. ...................................... 36
Ilustración 16 Superficies de contacto en un rodamiento. .............................................. 36
Ilustración 17 Modelo de sistema excitado .................................................................... 37 Ilustración 18 Análisis tiempo frecuencia de varias señales .......................................... 39
Ilustración 19 Espectrograma 3D con intervalos temporales pequeños ......................... 41
Ilustración 20 Espectrograma 3D con intervalos temporales grandes ............................ 41
Ilustración 21 Transformada de Hilbert de una onda cuadrada ...................................... 42
Ilustración 22 Esquema de desarrollo de la lógica difusa en comparación con métodos clásicos [13] .................................................................................................................... 44
Ilustración 23 Lógica clásica versus lógica difusa ......................................................... 46 Ilustración 24 Funciones de pertenencia más empleadas: (a) Triangular, (b) Trapezoidal, (c) Gaussiana y (d) Sigmoidal ........................................................................................ 46 Ilustración 25 Diagrama de bloques de un sistema de control basado en lógica difusa . 48
Ilustración 26 Actuación de los operadores AND, OR y NOT en lógica clásica y difusa ........................................................................................................................................ 51
Ilustración 27 Máquina de ensayo de rodamientos ........................................................ 53
Ilustración 28 Acelerómetro ........................................................................................... 54 Ilustración 29 Amplificador............................................................................................ 54 Ilustración 30 Tarjeta de adquisición de datos .............................................................. 55 Ilustración 31 Rodamiento ER10K ................................................................................ 55 Ilustración 32 Señal I-30-5000-2 .................................................................................... 57 Ilustración 33 Rodamiento sin defecto girando a 10 Hz ................................................ 60
Ilustración 34 Rodamiento sin defecto girando a 20 Hz ................................................ 61
Ilustración 35 Rodamiento sin defecto girando a 30 Hz ................................................ 61
Ilustración 36 Detalle del espectro en frecuencia del rodamiento sin defecto girando a 20 Hz .............................................................................................................................. 62
Ilustración 37 Rodamiento con defecto en bola girando a 10 Hz ................................... 62
Ilustración 38 Rodamiento con defecto en bola girando a 20 Hz ................................... 63
Ilustración 39 Rodamiento con defecto en bola girando a 30 Hz ................................... 63
Ilustración 40 Detalle del espectro en frecuencia del rodamiento con defecto en bola girando a 20 Hz .............................................................................................................. 64 Ilustración 41 Rodamiento con defecto en pista interna girando a 10 Hz ...................... 64

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-INDICE- 7
Ilustración 42 Rodamiento con defecto en pista interna girando a 20 Hz ...................... 65
Ilustración 43 Rodamiento con defecto en pista interna girando a 30 Hz ...................... 65
Ilustración 44 Detalle del espectro en frecuencia del rodamiento con defecto en pista interna a 20 Hz ................................................................................................................ 66 Ilustración 45 Rodamiento con defecto en pista externa girando a 10 Hz ..................... 66
Ilustración 46 Rodamiento con defecto en pista externa girando a 20 Hz ..................... 67
Ilustración 47 Rodamiento con defecto en pista externa girando a 30 Hz ..................... 67
Ilustración 48 Detalle del espectro en frecuencia del rodamiento con defecto en pista externa a 20 Hz ............................................................................................................... 67 Ilustración 49 Rodamiento sin defecto girando a 10 Hz ................................................ 69
Ilustración 50 Rodamiento sin defecto girando a 20 Hz ................................................ 69
Ilustración 51 Rodamiento sin defecto girando a 30 Hz ................................................ 69
Ilustración 52 Detalle del espectro en frecuencia del rodamiento sin defecto girando a 30 Hz .............................................................................................................................. 70
Ilustración 53 Detalle del espectro en frecuencia del rodamiento sin defecto girando a 20 Hz .............................................................................................................................. 71
Ilustración 54 Detalle del espectro en frecuencia del rodamiento sin defecto girando a 10 Hz .............................................................................................................................. 71
Ilustración 55 Rodamiento con defecto en bola girando a 10 Hz ................................... 72
Ilustración 56 Rodamiento con defecto en bola girando a 20 Hz ................................... 72
Ilustración 57 Rodamiento con defecto en bola girando a 30 Hz ................................... 72
Ilustración 58 Detalle del espectro en frecuencia del rodamiento con defecto en bola girando a 30 Hz .............................................................................................................. 73 Ilustración 59 Rodamiento con defecto en pista interna girando a 10 Hz ...................... 75
Ilustración 60 Rodamiento con defecto en pista interna girando a 20 Hz ...................... 75
Ilustración 61 Rodamiento con defecto en pista interna girando a 30 Hz ...................... 75
Ilustración 62 Detalle del espectro en frecuencia del rodamiento con defecto en pista interna a 10 Hz ................................................................................................................ 76 Ilustración 63 Detalle del espectro en frecuencia del rodamiento con defecto en pista interna a 20 Hz ................................................................................................................ 76 Ilustración 64 Detalle del espectro en frecuencia del rodamiento con defecto en pista interna a 30 Hz ................................................................................................................ 77 Ilustración 65 Rodamiento con defecto en pista externa girando a 10 Hz ..................... 78
Ilustración 66 Rodamiento con defecto en pista externa girando a 20 Hz ..................... 78
Ilustración 67 Rodamiento con defecto en pista externa girando a 30 Hz ..................... 78
Ilustración 68 Detalle del espectro en frecuencia del rodamiento con defecto en pista externa a 10 Hz ............................................................................................................... 79 Ilustración 69 Detalle del espectro en frecuencia del rodamiento con defecto en pista externa a 20 Hz ............................................................................................................... 79 Ilustración 70 Detalle del espectro en frecuencia del rodamiento con defecto en pista externa a 30 Hz ............................................................................................................... 80 Ilustración 71 FIS EDITOR ............................................................................................ 83
Ilustración 72 FIS EDITOR correspondiente al problema concreto del presente proyecto. ........................................................................................................................................ 84
Ilustración 73 MEMBERSHIP FUNCTION EDITOR. ................................................... 85
Ilustración 74 Gaussiana de desviación típica 2 y media 5 ......................................... 87
Ilustración 75 Creando la función de pertenencia BPFI ................................................. 88
Ilustración 76 Variable MAX1 con todas sus funciones de pertenencia ........................ 88
Ilustración 77 Función de pertenencia para la variable EXTERNA (% de fallo en pista externa) ........................................................................................................................... 89

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-INDICE- 8
Ilustración 78 Triangular de escalares 3,6 y 8 ................................................................ 90 Ilustración 79 RULES EDITOR ..................................................................................... 91 Ilustración 80 RULES VIEWER ...................................................................................... 94
Ilustración 81 Funciones de pertenencia para el clasificador independiente de la velocidad ....................................................................................................................... 100
Ilustración 82 Creación de una nueva GUI .................................................................. 116 Ilustración 83 GUI en blanco........................................................................................ 117 Ilustración 84 Fichero figura1.m .................................................................................. 117 Ilustración 85 Creación de un cuadro de texto estático ................................................ 118
Ilustración 86 Ventana de Propety Inspector ................................................................ 119 Ilustración 87 Formato final del archivo figura1.fig .................................................... 120 Ilustración 88 Formato final del fichero figura1.m ...................................................... 121 Ilustración 89 Ejemplo de utilización del interfaz gráfico ........................................... 123
Ilustración 90 Hoja de características del rodamiento utilizado ................................... 130
Ilustración 91 Hoja de características del acelerómetro utilizado ................................ 131

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-INTRODUCCIÓN- 9
1. INTRODUCCIÓN
El presente proyecto se enmarca en el mantenimiento predictivo de elementos de
mecánicos, más concretamente en rodamientos.
El mantenimiento de máquinas ha sido siempre uno de los temas que ha
ocupado las mentes de los ingenieros a lo largo del tiempo. Antes de la Revolución
Industrial existía lo que hoy en día conocemos con el nombre de mantenimiento
correctivo, por el cual cuando un componente mecánico de una máquina fallaba era
reparado o reemplazado por otro. Es decir, se realizaba el mantenimiento una vez
producido el fallo. Esto obligaba a detener la máquina y por tanto parar la producción
con las consecuencias económicas que ello acarreaba.
Con la llegada de la Revolución Industrial aparece el concepto de
mantenimiento preventivo. Esta nueva concepción del mantenimiento persigue
establecer una vida útil de los componentes para que éstos puedan ser reemplazados
antes de que se produzca su rotura. Por primera vez es posible programar la producción
evitando paradas imprevistas y adecuando los tiempos de mantenimiento a las
necesidades productivas. El inconveniente de este método de mantenimiento es que en
ocasiones se desperdician componentes cuya vida útil todavía no ha llegado a su fin y
que podrían seguir funcionando por más tiempo.
En los últimos tiempos las tendencias en el mantenimiento industrial han
evolucionado hacia el mantenimiento predictivo. En este tipo de mantenimiento se
pretende, mediante la monitorización de distintos parámetros del componente (amplitud
de las vibraciones, temperatura…) conocer el estado del mismo en tiempo real y
detectar el fallo cuando éste es todavía incipiente, pudiéndose programar una parada
para su sustitución. Las ventajas de este tipo de mantenimiento frente a los otros, es que
no se desperdicia vida útil de los distintos componentes mecánicos y que sigue
brindando la posibilidad de programar los tiempos de parada y mantenimiento de la
máquina, maximizando la productividad de ésta.
El presente proyecto se centrará, en el mantenimiento predictivo de rodamientos.
Estos componentes suelen ser concebidos y diseñados dentro de una máquina para ser

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-INTRODUCCIÓN- 10
los primeros en fallar, debido a su bajo coste y fácil sustitución. Por ello es de vital
importancia el conocimiento de sus estado, para predecir el buen funcionamiento de la
máquina.
Este tipo de componentes mecánicos tiene además la particularidad de tener tres
partes bien diferenciadas:
• La pista externa.
• La pista interna.
• Los elementos rodantes (tipicamente bolas o cilindros).
Por tanto, además de intentar predecir el momento en el que se producirá el
fallo, será importante localizar dónde se producirá éste.
Uno de los parámetros más estudiados para evaluar el estado de un componente
mecánico es la señal de vibración. A lo largo de este proyecto se abordará la
conveniencia de utilizar técnicas tradicionales de tratamiento de señales, como la
Transformada de Fourier o análisis más modernos.
1.1 OBJETIVO DEL PROYECTO
El objetivo de este proyecto es detectar fallos con cierto nivel de incipiencia de
rodamientos en servicio utilizando técnicas de mantenimiento predictivo.
En primer lugar, se pretende realizar una comparación entre diferentes métodos
de tratamiento de señales, con el objetivo de discernir cuál es el más adecuado para
analizar señales de vibración de rodamientos con distintos modos de fallo (fallo en pista
interna, en pista externa o en bolas). En este sentido, se comenzará estudiando la
Transformada de Fourier (FT), para dar paso a la Transformada de Hilbert (HT), técnica
que permite el tratamiento de señales no estacionarias.
En un segundo término, se utilizarán estas señales tratadas para diseñar un
sistema clasificador basado en lógica difusa o borrosa, que interprete las vibraciones de

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-INTRODUCCIÓN- 11
distintos rodamientos y que sea capaz de distinguir si nos encontramos ante un
rodamiento:
• Con fallo en bola.
• Con fallo en la pista externa.
• Con fallo en la pista interna.
• Normal (en buen estado y sin defectos incipientes).
A continuación, en la ilustración1, se muestra un esquema-resumen del
desarrollo del proyecto.
Ilustración 1 Esquema del desarrollo del proyecto
1.2 DESCRIPCIÓN Y ORGANIZACIÓN DEL PROYECTO
Como ya se introdujo en el objetivo del proyecto, éste se compone de dos partes
fundamentales. En la primera parte del proyecto se van a desarrollar distintas técnicas
de tratamiento de señales intentando concluir como objetivo de la primera parte, cuál es
la técnica más apropiada para nuestro caso de estudio y para la obtención de las
frecuencias de fallo de los cuatro tipos de rodamiento. Profundizando un poco más en
este aspecto, las técnicas que vamos a desarrollar son: La Transformada de Fourier y la
Transformada de Hilbert.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-INTRODUCCIÓN- 12
En la segunda parte del proyecto, partiremos de la técnica de tratamiento que
hayamos considerado más adecuada, para realizar un sistema clasificador basado en la
Lógica Difusa. Este clasificador, debe será capaz de decidir, a partir de las frecuencias
de fallo de una señal de vibración de un rodamiento, del tipo de rodamiento que se
trata, distinguiendo entre cuatro condiciones:
• Rodamiento con fallo en una bola.
• Rodamiento con fallo en pista externa.
• Rodamiento con fallo en pista interna.
• Rodamiento en condiciones normales.
Como colofón al presente proyecto, se ha decidido implementar un interfaz
gráfico de usuario, que permita a cualquier persona, sin conocimientos añadidos de
programación, conocer tanto si un rodamiento presenta un defecto, como dónde lo
presenta.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 13
2. MARCO TEÓRICO DEL PROYECTO.
En este apartado se va a realizar una introducción teórica sobre conceptos clave
para el entendimiento global del proyecto. Los temas más destacados dentro de esta nota
teórica serán: Los rodamiento y sus defectos, técnicas de procesamiento de señales y
fundamentos de lógica difusa o borrosa.
2.1 RODAMIENTOS Y SUS CARACTERÍSTICAS
Los rodamientos son componentes mecánicos muy usados en la industria, en la
mayoría de las ocasiones como elementos transmisores de carga entre elementos
mecánicos con giro relativo entre sí [1].
Aunque hoy en día los rodamientos han evolucionado mucho y por consiguiente
sus vidas útiles se han visto incrementadas, muchos de éstos todavía suelen fallar. Estos
fallos pueden, a su vez causar paros en procesos críticos de la producción industrial.
El análisis de vibraciones en los rodamientos se estudia desde hace varias
décadas, y con el paso del tiempo ha ido mejorando con diversas técnicas, las cuales han
abordado el problema desde varios puntos de vista.
En el mercado existen rodamientos de numerosos tamaños y diseños. A grandes
rasgos, se pueden dividir en dos grandes categorías [1]:
• Rodamientos de carga radial: Aquellos que soportan la carga en la
dirección radial, es decir, en dirección perpendicular a su eje.
• Rodamientos de carga axial: -aquellos que soportan la carga en la
dirección del eje.
En ocasiones un rodamiento puede soportar carga axial y radial al mismo
tiempo. Dentro de los rodamientos de carga radial, se encuentran: los rodamientos
rígidos de bolas, rodamientos de bolas a rótula, rodamientos de bolas con contacto
angular, rodamientos de rodillos cilíndricos, rodamientos de agujas, rodamientos de
rodillos a rótula y de rodillos cónicos [1].

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 14
Dentro del presente proyecto, de todos estos tipos citados, se trabajará con
rodamientos de una hilera de bolas con contacto angular como el que puede observarse
en la ilustración 2.
Ilustración 2 Rodamiento de una hilera de bolas con contacto angular
Los rodamientos de una hilera de bolas, son los más empleados en la industria
para solicitaciones de poca carga y alta velocidad.
En sus pistas se encuentran los caminos de rodadura continuos y profundos. Son
adecuados para soportar cargas axiales en cualquiera de los dos sentidos incluso a altas
velocidades.
Estos rodamientos están construidos con aceros templados (SAE 52100). Los
aceros templados tienen la siguiente composición aproximada:
• 1% de carbono
• 1.55 % de Cromo. Situado en las bolas y las pistas. EL cromo ha de tener
una gran pureza según norma DIN/ISO 281.
En su funcionamiento pueden alcanzar hasta 125ºC, aunque existen rodamientos
fabricados de materiales especiales que pueden soportar temperaturas más elevadas.
En esta ilustración 2 pueden apreciarse perfectamente las distintas partes de un
rodamiento de una hilera de bolas:
• Bola.
• Pista interior.
• Jaula.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 15
• Retén (En los casos que se requiera).
• Pista exterior.
La jaula de un rodamiento, tiene como misión principal, separar los elementos
rodantes entre sí, a una determinada distancia, que asegure que éstos no entran en
contacto. Esto minimiza el rozamiento dentro del rodamiento y por consiguiente la
generación de calor. Cuando los rodamientos están lubricados con grasa, ésta se adhiere
a la jaula permitiendo una lubricación continua sin necesidad de ningún elemento
auxiliar. Por el contrario cuando los rodamientos están lubricados con aceite, se requiere
el empleo de unos elementos denominados retenes, que consiguen la estanqueidad del
rodamiento, para que el lubricante no se salga de los mismos. Las jaulas en general no
se ven afectadas por agentes lubricantes o disolventes orgánicos. Aunque la presencia
de agua plantea un riesgo de corrosión.
Las características más importantes inherentes a los rodamientos son:
• La holgura:
La holgura es el desplazamiento relativo de una pista respecto de la otra. Esta
holgura no solo afecta a los ángulos de contacto sino también a los esfuerzos,
deformaciones, distribución de carga y resistencia a la fatiga del rodamiento.
Las causas principales que suelen causar esta holgura son: interferencias entre el
eje donde se monta el rodamiento y la pista interior de éste, acabado superficial de las
superficies y los cambios de temperatura.
Los fabricantes recomiendan que, en servicio, un rodamiento de bolas posea una
holgura pequeña, que varíe entre 0.1 y 1 mm aproximadamente [2], por lo que en
ocasiones es necesario aplicar una precarga.
• La precarga:
La precarga tiene como principales funciones: eliminar la holgura radial y axial,
incrementar la rigidez del conjunto eje-rodamiento, reducir el efecto de las ondulaciones
de las pistas y homogeneizar los ángulos de contacto entre los elementos rodantes y las

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 16
pistas de los rodamientos, incluso cuando estos giran a alta velocidad. La precarga debe
ser la mínima requerida. El motivo es que así se reduce la generación de calor, que es
uno de los factores principales que disminuye la vida en servicio del rodamiento [1].
• La carga:
La carga transmitida a través de los elementos rodantes de una pista a la otra
depende de la geometría interna del rodamiento, de la magnitud y del tipo de carga (ya
sea dinámica o estática). Cuando se varían las condiciones de carga y velocidad en la
máquina, se debe tener en cuenta la posible repercusión sobre sus componentes.
• Vida nominal:
Mediante la ecuación (1) es posible calcular la vida nominal de un rodamiento
(norma DIN/ISO 281) [1].
( )Ph P
Cn
L.60
100000010 = (1)
Donde:
L10h : Vida nominal, en horas de servicio.
n : Velocidad de giro, en [r/min.].
C : Capacidad de carga dinámica, en [N].
P : Carga dinámica equivalente, en [N].
En esta ecuación, puede observarse como a velocidad constante, un incremento
de la carga disminuye de manera significativa la resistencia a fatiga del rodamiento y en
consecuencia su vida nominal.
• La lubricación:
Una adecuada lubricación es fundamental para el correcto funcionamiento de los
rodamientos. La cantidad y el tipo de lubricante tienen un efecto muy importante sobre
las propiedades y vida de servicio de los rodamientos.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 17
Las principales funciones del lubricante se pueden resumir en:
o Evita el contacto entre los metales del rodamiento disminuyendo la
fricción, que es la principal causa de generación de calor.
o Transmitir la carga entre los elementos del rodamiento.
A su vez existen también distintas condiciones de lubricación, entre las que
cabe destacar:
o Condición capa límite.
o Lubricación mixta.
o Lubricación hidrodinámica.
Ilustración 3 Condiciones de lubricación [1]
2.2 FRECUENCIAS NATURALES DE BOLA Y PISTA
Los rodamientos se eligen para que soporten una determinada vida en servicio.
Esta vida útil, se calcula suponiendo que se realiza una instalación adecuada del
rodamiento y que éste operará con las condiciones de diseño establecidas en los
catálogos del fabricante. Sin embargo, se ha observado que en muchas ocasiones, los
rodamientos fallan antes de que finalice la vida útil estimada. Cuando aparece un
defecto en alguna de las partes del rodamiento, dicho defecto produce una vibración que
excita las frecuencias naturales de vibración de las bolas y las pistas [2].

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 18
Las frecuencias naturales para los modos de vibración de las bolas y pistas de un
rodamiento, pueden ser calculadas teóricamente a partir de las ecuaciones (2) y (3).
ρ2
848.0 E
dwnb = (2)
( )
m
EI
ia
iiwnr
22
2
1
1
+−= (3)
Donde: wnb: Frecuencia natural de las bolas.
wnr: Frecuencia natural de las pistas, en modo n = i.
i: Modo de vibración (2,3,4,...).
a: Radio del eje.
I: Momento de inercia de la sección transversal del rodamiento.
E: Modulo de elasticidad del material del rodamiento.
m: Masa de la pista por unidad de longitud.
d: Diámetro de las bolas
ρ: Densidad del metal del rodamiento.
Está demostrado, que cuando los rodamientos son montados sobre los ejes, las
frecuencias naturales no varían significativamente. Además debemos decir que, la
frecuencia de las bolas suele ser en general más alta que la de las pistas.
2.3 OBTENCIÓN ANALÍTICA DE LAS FRECUENCIAS NATURALE S DE
FALLO EN UN RODAMIENTO
En servicio sólo una pequeña región del rodamiento experimentará la carga en
un momento determinado. Esta área se denomina zona de carga y tiene lugar en ambas
pistas para cada revolución.
Durante cada revolución del rodamiento, un número determinado de bolas
pueden ser golpeadas por un defecto en alguna de las pistas. Este número es función del
tamaño del defecto, geometría del rodamiento y longitud de la zona de carga.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 19
Para obtener las frecuencias naturales de fallo de un rodamiento, es necesario
conocer la relación entre los distintos elementos rotatorios dentro de un rodamiento, así
como sus velocidades relativas. En la ilustración 4 podemos observar los elementos
rotatorios de un rodamiento (en este caso de bolas) tanto en una vista frontal, como
transversal [3].
Ilustración 4 Vista frontal y transversal de un rodamiento de bolas [3]
En la ilustración 4 se pueden observar los siguientes parámetros:
Vo: Velocidad de la pista externa.
Vc: Velocidad de la bola.
Vi: Velocidad de la pista interna.
Bd: Diámetro de la bola o rodillo.
Pd: Diámetro efectivo del rodamiento.
Φ: Ángulo de contacto medido desde la línea central de la bola al eje del
rodamiento.
2.3.1 FRECUENCIA FUNDAMENTAL DEL TREN DE ELEMENTOS (FTF)
Esta frecuencia fundamental del tren de elementos, representa la frecuencia de
giro de la jaula. Para su cálculo, empezaremos calculando la velocidad lineal de cada
bola tomada desde su centro, mediante la ecuación (4):

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 20
2
oic
vvv
+= (4)
Por otro lado, La velocidad angular ω es definida como la velocidad lineal v
dividida por el radio r, tal y como muestra la ecuación (5):
r
vw = (5)
Por lo que:
2/
2/)(
d
oic
P
vvw
+= (6)
Donde wc es la velocidad angular del centro de la bola y también de la jaula.
De este modo wc pude ser expresada de la manera:
d
doo
d
dii
d
oi
cP
Bww
P
Bww
P
BdPdw
BdPdw
w2
cos
22
cos
2
2
cos
22
cos
2 φφφφ
++−=
++
−=
Por lo que finalmente:
++
== −Pd
Bdw
Pd
BdwwFTF oic
φφ cos1
cos1
2
1 [Hz] (7)
De donde:
Wi: velocidad angular de la pista interior del rodamiento.
Wo: velocidad angular de la pista exterior del rodamiento.
2.3.2 FRECUENCIA DE PASO DE LAS BOLAS POR LA PISTA EXTERIOR
(BPFO)
Esta frecuencia representa un defecto localizado en la pista exterior, aunque su
definición es la frecuencia de las bolas pasando sobre un punto de la pista exterior del
rodamiento.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 21
Podemos describirla como el número de bolas multiplicado por la velocidad
angular relativa entre la pista exterior y la bola, tal y como se muestra en la ecuación
(8):
ocb wwNBPFO −= [Hz] (8)
Reemplazando los términos de velocidad angular por las expresiones estudiadas
anteriormente obtenemos que:
−−
−=
−++−=
=
−
++
= −
d
doioibo
d
doo
d
diib
ooib
P
BwwwwNw
P
Bww
P
BwwN
wPd
Bdw
Pd
BdwNBPFO
φφφ
φφ
cos
222
cos
22
cos
2
cos1
cos1
2
1
Ahora, si factorizamos nos queda:
( )
−−=Pd
Bdwowi
NbBPFO
φcos1
2 [Hz] (9)
De donde Nb es el número de bolas del rodamiento.
2.3.3 FRECUENCIA DE PASO DE LAS BOLAS POR LA PISTA INTERIOR
(BPFI)
La frecuencia de paso de las bolas por la pista interior representa un defecto
localizado en la pista interior.
Podemos expresar la BPFI como el número de bolas multiplicado por la
velocidad angular relativa entre la pista interior del rodamiento y el centro de la bola, tal
y como muestra la ecuación (10):
cib wwNBPFI −= [Hz] (10)
Esta expresión puede reescribirse haciendo uso de las fórmulas estudiadas
anteriormente, de la siguiente manera:

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 22
−+
−=
−−+−=
=
++
−= −
d
doioib
d
doo
d
diiib
oiib
P
BwwwwN
P
Bww
P
BwwwN
Pd
Bdw
Pd
BdwwNBPFI
φφφ
φφ
cos
222
cos
22
cos
2
cos1
cos1
2
1
( )
+−=Pd
Bdwowi
NbBPFI
φcos1
2 [Hz] (11)
2.3.4 FRECUENCIA DE GIRO DE LAS BOLAS (BSF)
Es la velocidad angular de un elemento rodante (bola) sobre su eje y representa
un defecto localizado en una o varias de las bolas del rodamiento.
Esta frecuencia puede ser expresada como la velocidad lineal de un punto de la
pista interior en contacto con la superficie de la bola.
( ) icib rwwv ⋅−= (12)
Donde r i es el radio de la pista interior del rodamiento.
La frecuencia de giro de la bola BSF, puede ser escrita entonces mediante la
ecuación (13):
( )b
ici
b
b
r
rww
r
vBSF ⋅−== [Hz] (13)
De donde rb es el radio de la bola y que mediante relaciones geométricas
podemos transformar en:
( ) ( )
−⋅−=
2
2/cosd
ddci
BBP
wwBSFφ
(14)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 23
La ecuación (14) también puede expresarse de la siguiente manera:
−
++
−= −Bd
BdPd
Pd
Bdw
Pd
BdwwBSF oii
φφφ coscos1
cos1
2
1 (15)
Si ordenamos convenientemente la expresión (15), resulta:
( )
−−=
2
22cos1
2 d
d
cid
d
P
Bww
B
PBSF
φ [Hz] (16)
2.4 RESUMEN DE FRECUENCIAS NATURALES DE FALLO EN UN
RODAMIENTO
Las ecuaciones (7), (9), (11) y (16) son fórmulas generales en donde las dos
pistas del rodamiento pueden estar girando a velocidades distintas entre sí. También el
ángulo de contacto de las bolas puede tomar el valor cero.
Si particularizamos para el caso en el que la pista exterior del rodamiento esta en
reposo y la pista interna rotando a la velocidad del eje, esto es:
0=ow (17)
60
RPMwi = (18)
Obtenemos las ecuaciones simplificadas (19), (20), (21) y (22) :
= −Pd
BdRPMFTF
φcos1
2
1
60 [Hz] (19)
+
=Pd
BdNbRPMBPFI
φcos1
260 [Hz] (20)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 24
−
=Pd
BdNbRPMBPFO
φcos1
260 [Hz] (21)
−
=
2
22cos1
260 d
d
d
d
P
B
B
PRPMBSF
φ [Hz] (22)
Todas estas fórmulas están basadas en condiciones ideales, es decir, se supone
que se produce un contacto puntual entre los distintos elementos rodantes. Es posible,
sin embargo, que exista un cierto error al comparar estos valores con los que se
obtendrán realmente en posteriores desarrollos de este proyecto. Esto es debido al
desplazamiento de las superficies y a la pérdida de contacto entre las bolas y las pistas.
Las fórmulas para determinar las diferentes frecuencias naturales de fallo
generadas por los rodamientos y presentadas en esta sección fueron desarrolladas por
Thomas D. Millar y Harvey L. Bladerstron en [3].
2.5 MODELO DE VIBRACIÓN PARA UN RODAMIENTO CON DEFE CTO
LOCALIZADO
En esta sección pasaremos a analizar un modelo para conocer cómo serán las
señales de vibración de un rodamiento con defecto localizado en el tiempo. Esto nos
servirá para tener una visión previa del tipo de señal que esperamos obtener. Aunque
existen multitud de modelos para simular una señal de vibración, en este proyecto, se
presentará un modelo detallado. Este modelo considera el sistema de un grado de
libertad con amortiguamiento, cuya respuesta es una función impulso [4].
2.5.1 CONSIDERACIONES PARA EL MODELO
Para un rodamiento que presenta un defecto localizado, la vibración que se
produce en el caso de que la velocidad de giro sea constante, es un impulso periódico,
que es función de la geometría, velocidad y de la zona de localización del defecto [5].

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 25
La vibración que se genera puede estar en tres rangos de frecuencias:
• Frecuencias intermedias (1-10 Khz). Estas vibraciones estimulan las
frecuencias resonantes de la estructura del rodamiento.
• Frecuencias bajas (por debajo de los 500 Hz).
• Frecuencias altas (30Khz.-100 Khz).
La bola, al pasar por un defecto, genera una onda de esfuerzo o impacto.
Muchos estudios han demostrado que el primer síntoma que presentan los rodamientos
cuando se generan ciertos tipos de defectos incipientes tales como grietas, hendiduras,
rebordes y picaduras, es una vibración con componentes de alta frecuencia, que son
consecuencia de la generación de ondas de esfuerzo. Las ondas de esfuerzo son de
naturaleza mecánica, esto implica que se propagan y transmite en medios deformables
o elásticos. Este tipo de ondas se caracterizan por ser transitorias y de corta duración y
se producen en un amplio rango de frecuencias, desde 1kHz hasta incluso superar los
50kHz. Principalmente son originadas por el contacto metal-metal y su velocidad de
propagación es independiente de la velocidad de rotación de la máquina [6].
Un claro ejemplo de defectos en rodamientos que generan este tipo de ondas
son las grietas. Estas pueden estar producidas por fatiga en los rodamientos, fricción
entre superficies y desgaste abrasivo, como estudiaremos más en profundidad a
continuación en este proyecto.
2.5.2 DESARROLLO DEL MODELO
Las ondas de esfuerzo se generan cuándo un elemento rodante pasa sobre un
defecto, si la velocidad de giro es constante, estos impactos se generarán
periódicamente. Como consecuencia de estos pulsos la frecuencia natural del
rodamiento es excitada. La duración de cada pulso depende del factor de
amortiguamiento del sistema [5].
Un modelo simplificado para la simulación de estos pulsos es un sistema: lineal,
discreto y sub-amortiguado, con un sólo un modo de vibración dominante después de

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 26
cada impacto y con las bolas como elementos de rigidez [5]. Este modelo se puede
observar en la ilustración 5:
Ilustración 5 Modelo de rodamiento excitado por un defecto localizado en pista externa [5]
La ecuación de este sistema es:
)(...
tFkxxcxm =++ (23)
La respuesta de este sistema a una función impulso unitario (o función delta de
Dirac) se muestra en la ecuación (24) [7]:
)()( twsenmw
eth d
d
wntξ−
= (24)
Donde:
ξ: Factor de amortiguamiento.
wn: Frecuencia natural para vibración libre.
wd: Frecuencia de resonancia para sistema amortiguado.
m: Masa del sistema rodamiento-eje.
La ecuación (24) puede ser reescrita como:
)()()( twsenetth d
ntαα −= (25)
Esta expresión corresponde a la respuesta ante un impulso unitario, en donde
α(t) es la función que se relaciona con el punto de ubicación del defecto y αm es el
factor de decaimiento del sistema. Esta función es de carácter periódico dependiendo de
la función α(t) [6].

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 27
Ubicación del defecto Propiedades de α(t)
Pista externa Función no periódica de amplitud constante ao
Pista interna Función de amplitud máxima ao y frecuencia de giro del eje
Bola Función de amplitud máxima ao y frecuencia 2BSF Tabla 1 Amplitud y periodicidades de la función α(t) con respecto a la ubicación del defecto
Producto de la rotación del eje a una velocidad constante, estas vibraciones
ocurrirán periódicamente con una frecuencia de 1 /T donde T es el período de
separación entre los pulsos. De este modo podemos escribir una función periódica que
genera esta sucesión de pulsos, tal y como se refleja en la ecuación (26):
∑ −=j
ITtdotd )()( δ (26)
En el modelo se consideran los impactos como señales impulso, esto ocurre sólo
en defectos incipientes, ya que a medida que el defecto crece variará tanto la duración
del pulso, como su forma y por tanto la amplitud de su respuesta. Así para un defecto en
la pista exterior la salida del sistema vendrá dada por la ecuación (27):
)(*)()( thtdtx = (27)
Para el caso en el que tengamos defectos en la pista interior o en las bolas, se
debe agregar a la función d(t) un factor que considere la magnitud, ubicación del
defecto y dirección de la carga, ya que al existir un desplazamiento angular relativo
entre la distribución de carga y el defecto a medida que gira el rodamiento, la amplitud
del pulso variará. Este factor nos da información de cómo la fuerza de los pulsos variará
cuando el defecto se mueve dentro y fuera de la zona de carga [6].
Para una carga radial este factor es el expresado en la ecuación (28):
( ) 2
3
0,cos12
11max)(
−−= θε
tB (28)
La ecuación (28) se conoce con el nombre ecuación de Stribeck [6] y es la
distribución aproximada de carga para un rodamiento de bolas bajo carga radial.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 28
En donde:
ε: es el factor de distribución de carga el cual puede variar entre 0 y 1.
θ: es el ángulo de variación de la zona de carga, que puede apreciarse en la
ilustración 6.
Ilustración 6 Distribución de carga radial para un rodamiento [6]
De la ecuación (28) se observa la dependencia de la carga a la que son sometidos
los elementos rodantes con respecto a la posición angular de éstos. A continuación, en
la tabla 2 [6], se presenta la casuística que se presenta para los dos tipos de carga que
se pueden presentar en un rodamiento.
Pista externa Pista Interna Elemento rodante
Estática Sin periodicidad Frecuencia de giro del eje FTF
Dinámica Frecuencia de giro del eje Sin periodicidad Frecuencia de giro del eje-FTF
Carga
Ubicación del defecto
Tabla 2 Frecuencias de variación de los pulsos [6]
De las consideraciones anteriores se tiene que la señal vibratoria es:
)(*)(*)()( tBthtdtx = (29)
Por último, para considerar el defecto localizado en la bola o el elemento
rodante, se debe agregar otro factor a la ecuación, que simula alternancia de los golpes
producto del defecto, ya que en algún segundo golpeará la pista interna y en otro la pista
externa. De esta consideración la señal vibratoria será la mostrada en la ecuación (30):
)(*)()()1()(0
thttBtxi
i∑∞
=
−= δ (30)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 29
Para calcular la aceleración derivaríamos esta expresión dos veces.
2.6 FACTORES CAUSANTES DE DEFECTOS EN RODAMIENTOS.
El principal causante de defectos en rodamientos es el fenómeno de fatiga. Sin
embargo, existen otros muchos factores que afectan a la vida nominal del rodamiento,
tal y como se aprecia en la ilustración 7, facilitada por el fabricante SKF [4].
Ilustración 7 Factores que provocan defectos en rodamientos
A continuación se procederá a describir estos factores que ocasionan daño en los
elementos del rodamiento y el tipo de daños que se puede esperar.
• Problemas de lubricación
Cerca del 36% de los fallos prematuros de todos los rodamientos son causados
por especificaciones y aplicaciones incorrectas de los lubricantes. Inevitablemente,
cualquier rodamiento sin una correcta lubricación fallará antes de su vida nominal de
servicio. Los rodamientos son a menudo uno de los componentes de más difícil acceso

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 30
en la maquinaria, por ello, una lubricación inadecuada supone habitualmente problemas
complejos.
La grasa presenta la ventaja, con respecto al aceite, de que es más fácil de
retener, ya que ésta se aloja en la jaula y lubrica continuamente al rodamiento. Esto hace
que en muchos casos se pueda prescindir de retenes, destinados a contener el lubricante
en el interior del rodamiento. Aún así, la grasa se debe colocar en el rodamiento con
cuidado, ya que un exceso de ella provoca un rápido aumento de la temperatura de
funcionamiento, en especial cuando giran a gran velocidad. Una regla es que el
rodamiento debe estar lleno de grasa entre un tercio y un medio del volumen total libre
del rodamiento, en el caso del aceite, este debe llenar hasta la mitad del elemento
rodante más inferior.
• Montaje incorrecto
Alrededor del 16% de todos los fallos prematuros de los rodamientos son
causados por montajes deficientes o inadecuados (normalmente por el uso de la fuerza
bruta...). Se ignora a menudo, la disponibilidad de las herramientas correctas para el
montaje.
• Desalineamiento
El desalineamiento produce una pequeña sobrecarga que puede ocasionar la
ruptura de la película de aceite con el consiguiente riesgo de la falta de lubricación en la
zona de carga. En general, cualquier sobrecarga por desalineamiento reduce la vida útil
de un rodamiento.
• Desequilibrio
Todos los elementos rotativos son siempre fuentes potenciales de vibraciones
mecánicas. El desequilibrio en la distribución de la masa es una de las causas más
frecuentes ya que, únicamente cuando el eje de giro coincida con el de gravedad, las
fuerzas de inercia no producirán ninguna acción centrífuga perturbadora en los
rodamientos. En el mundo real esto es imposible de conseguir por muy estrictas que
sean las tolerancias de fabricación. Por tanto, siempre tendremos presente un cierto
grado de desequilibrio en máquinas rotativas. El criterio para establecer el desequilibrio

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 31
residual permisible es una solución de compromiso entre el coste y la responsabilidad
de la aplicación del rodamiento.
• La corrosión
Es un proceso químico que experimentan la mayoría de los metales y que
conlleva su deterioro. Este proceso puede ocurrir con el simple contacto entre el metal y
la atmósfera o cuando se produce la interacción entre el metal y un medio líquido rico
en oxígeno y ácidos. La práctica totalidad de los materiales metálicos empleados en la
industria sufren este proceso. Por este motivo es una variable más importante la
velocidad con la que ocurre este proceso, que el simple hecho de que el proceso tenga
lugar. La velocidad, será la variable principal a controlar en los procesos de corrosión ya
que nos determinará la vida útil del rodamiento frente a corrosión.
Ilustración 8 Rodamiento con corrosión
• La contaminación Un rodamiento es un componente de precisión que no funcionará correctamente
a no ser que esté bien lubricado y aislado de toda contaminación. Ya que los
rodamientos lubricados de por vida con grasa (obturados) constituyen sólo una pequeña
proporción de todos los rodamientos en uso, al menos el 14% de todos los fallos
prematuros son atribuibles a problemas causados por contaminación. En este ámbito,
entran en juego los obturadores para los entornos de trabajo más duros.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 32
2.7 TIPOS DE DEFECTOS EN RODAMIENTOS.
Los tipos más significativos de daños que podemos encontrarnos en rodamientos
son:
• Desgaste
La presencia de partículas abrasivas, problemas de lubricación y problemas de
vibración, pueden provocar un serio desgaste en el rodamiento. En la ilustración 9
puede observarse un rodamiento con este tipo de daño.
Ilustración 9 Rodamiento con desgaste producido por partículas abrasivas
En la tabla 3 encontramos un resumen de los tipos de desgaste que podemos
encontrar, así como la solución a implementar para evitarlo.
Tipo de
desgaste
Descrpción Causa Acción correctiva
Por partículas
abrasivas
Pequeñas
identaciones
alrededor de las
pistas y bolas.
.Malas condiciones delimpieza
durante el montaje. Sellado
imperfecto. Lubricante
contaminado por partículas
abrasivas.
Por
problemas de
vibración
Marcas en las
pistas.
Rectangulares
para rodamientos
de rodillos y
circulares en
rodamientos de
bolas.
Rodamiento sometido a vibración
externa.
Asegurar una precarga radial al
rodamiento en su transporte. Aislar
el rodamiento de vibraciones. Usar
método de lubricación continua.En
este aspecto son mejores los
rodamientos de bolas (usar
preferentemente).
No sacar rodamiento de su embase
protector hasta el momento de
montaje. Verificar sellado y util izar
lubricante en buenas condiciones.
La superficie tiene
apariencia de
espejo. En la fase
final decoloración
café azulada .
Falta de lubricante o lubricante
en mal estado (ha perdido sus
propiedades).
Por
problemas de
lubricación
Chequear correcta lubricación del
rodamiento y usar lubricante en
buen estado.
Tabla 3 Tipos de desgaste: descripción, causas y acción correctiva [8]

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 33
En las ilustraciones 10 y 11 se muestran algunos ejemplos muy ilustrativos de
los tipos de desgaste descritos anteriormente.
Ilustración 10 Rodamiento con desgaste producido por problemas de lubricación
Ilustración 11 Rodamientos con desgaste producido por problemas de vibración para rodamiento
de rodillos y bolas respectivamente • Indentación:
Se produce en las pistas y/o elementos rodantes, cuando el montaje se realiza
con elevada fuerza aplicada de manera brusca o seca (martillazos). En la ilustración 12
se observan los daños producidos por este tipo de indentación. Estos defectos se
transmiten hacia los elementos rodantes pudiéndose producir incrementos de presión
considerables en las zonas de contacto elemento rodante-pista. Las partículas abrasivas
también pueden causar indentación [8], tal y como puede observarse en la ilustración
13.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 34
Ilustración 12 Rodamiento con indentación debida a montaje inapropiado
Ilustración 13 Rodamiento con indentación debida a partícula abrasiva.
• Flaking o descascarillado:
Como ya se comentó en el desarrollo de este marco teórico, los rodamientos,
tienen una vida útil que está determinada por una serie de variables como la velocidad
de giro y la carga a la que están sometidos. Transcurrido este tiempo, se producirá un
fallo debido a la fatiga del material.
El fenómeno de fatiga está producido por tensiones de carácter cíclico en la
superficie de rodadura de la zona de carga del rodamiento. En un momento
determinado, estas tensiones cíclicas, originan una micro fisura, que, posteriormente, se
va propagando gradualmente con el número de ciclos hacia el exterior de la superficie.
-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 35
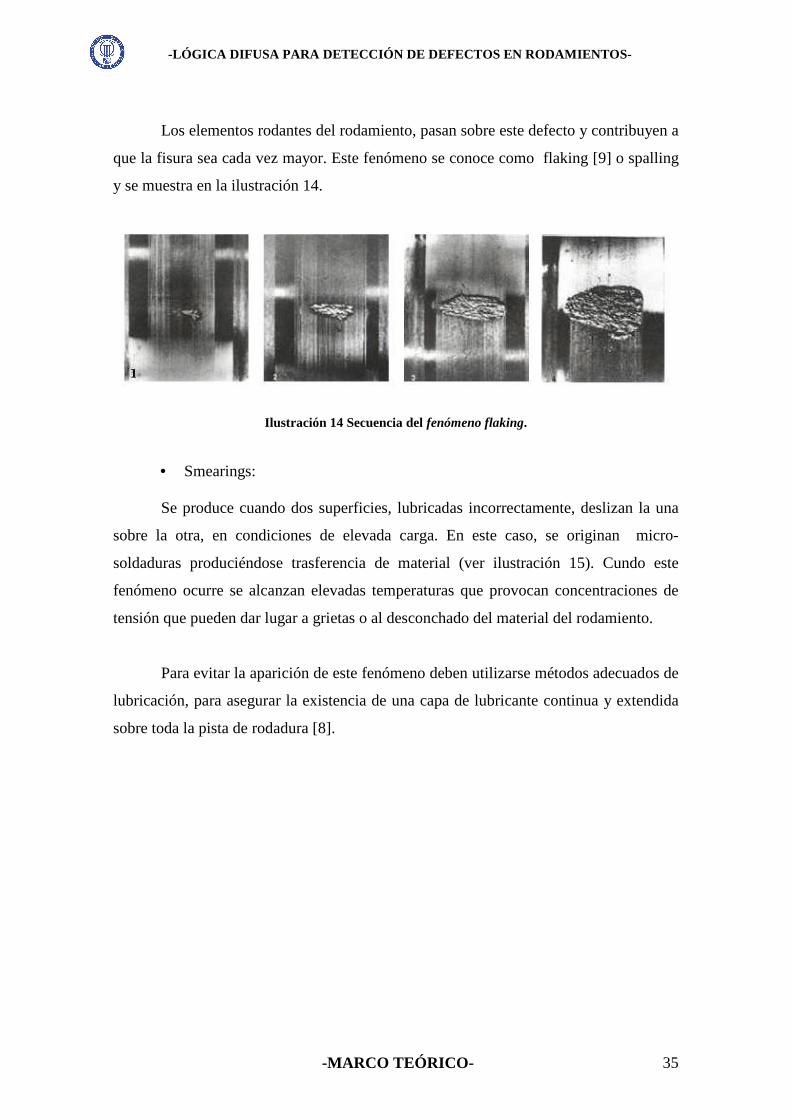
Los elementos rodantes del rodamiento, pasan sobre este defecto y contribuyen a
que la fisura sea cada vez mayor. Este fenómeno se conoce como flaking [9] o spalling
y se muestra en la ilustración 14.
Ilustración 14 Secuencia del fenómeno flaking.
• Smearings:
Se produce cuando dos superficies, lubricadas incorrectamente, deslizan la una
sobre la otra, en condiciones de elevada carga. En este caso, se originan micro-
soldaduras produciéndose trasferencia de material (ver ilustración 15). Cundo este
fenómeno ocurre se alcanzan elevadas temperaturas que provocan concentraciones de
tensión que pueden dar lugar a grietas o al desconchado del material del rodamiento.
Para evitar la aparición de este fenómeno deben utilizarse métodos adecuados de
lubricación, para asegurar la existencia de una capa de lubricante continua y extendida
sobre toda la pista de rodadura [8].

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 36
Ilustración 15 Rodamiento con Smearing en su pista exterior.
• Superficies deformadas: Cuando la película de lubricante entre las pistas y los elementos rodantes es
demasiado delgada, los salientes de las superficies rugosas estarán en contacto (ver
ilustración 16). A causa de esta interacción se producirán pequeñas grietas en las
superficies de rodadura, que en ningún caso deben ser confundidas con la grieta que
origina la fatiga clásica del material. Estas grietas que originan las superficies
deformadas, son, en general, de pequeño tamaño y superficiales pudiendo llegar a
ocasionar la incorrecta rodadura de la bola [8].
Si la lubricación del rodamiento es adecuada no debemos temer la aparición de
defectos debidos a superficies deformadas.
Ilustración 16 Superficies de contacto en un rodamiento.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 37
2. 8 PROCESAMIENTO DE LA SEÑAL.
El objetivo fundamental del procesamiento de señales, en el presente proyecto
fin de carrera, es extraer parámetros o funciones característicos del modelo, que nos
sirvan para clasificar, monitorizar y diagnosticar, distintos tipos de sistemas.
El procesamiento de la señal, se lleva a cabo a menudo para analizar el
comportamiento de sistemas tales como máquinas, estructuras., etc. Al ser excitadas
mediante distintas señales, tal y como se muestra en la ilustración 17.
Ilustración 17 Modelo de sistema excitado
Esta sección se dedicará al estudio de las diferentes técnicas de procesamiento
de la señal, para conseguir obtener información representativa de las señales de
vibración de rodamientos. Estas técnicas pueden agruparse en las que trabajan en el
dominio de la frecuencia, en el dominio temporal o las técnicas que utilizan ambos
dominios. Para la mejor comprensión del desarrollo de este proyecto, se explicarán a
continuación aquellas relacionadas con el dominio de la frecuencia.
2. 8.1 EL DOMINIO DE LA FRECUENCIA.
El uso del dominio de la frecuencia en muchas aéreas de aplicación se basa en
un conjunto de razones entre las que destacan las siguientes [10]:
• El significado físico es a menudo más fácil de obtener en el dominio de la
frecuencia que en el dominio del tiempo en la descripción de señales y
sistemas.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 38
• Los patrones significativos de la señal son, a menudo, más fáciles de
reconocer. Pequeños cambios en la señal, son reconocidos mejor en la
representación del dominio de la frecuencia.
• Los sistemas mecánicos se modelan frecuentemente mediante un sistema
lineal, descrito por ecuaciones diferenciales lineales. Mediante el uso de la
transformada de Fourier, podemos convertir estas ecuaciones en algebraicas.
El análisis clásico de señal en el dominio de la frecuencia es la descomposición
en series de Fourier.
2. 8.2 LA TRANSFORMADA DE FOURIER.
La Transformada de Fourier (FT) es una herramienta matemática que nos ayuda
a describir el comportamiento de funciones no periódicas. Su objetivo es la
descomposición de la función en una suma de funciones armónicas [10].
La definición de esta transformada viene dada por las ecuaciones (29) y (30):
∫∞
∞−= dfkfjfXtx )2exp()()( π
(29)
∫∞
∞−−= dtkftjtxfX )2exp()()( π
(30)
De manera simbólica podemos decir que:
)()( fXtx ↔ (31)
)( fX es la transformada de Fourier de )(tx . Siendo )(tx la representación de
la señal en el dominio del tiempo y )( fX en el dominio de la frecuencia.
En la ilustración 18 podemos observar las dos representaciones mencionadas
anteriormente para distintas señales. Las dos primeras señales son sinusoidales, la
frecuencia de la segunda es superior a la de la primera, como se puede observar en el
análisis en frecuencia. La tercera señal es la suma de las dos primeras y tras aplicar la
transformada de Fourier se observan las frecuencias de ambos armónicos.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 39
Cuando tratamos con señales complejas compuestas por gran cantidad de
armónicos, el análisis en el dominio de la frecuencia nos permite distinguir las
frecuencias de los armónicos principales, labor que sería casi imposible si sólo
dispusiéramos del análisis temporal.
Ilustración 18 Análisis tiempo frecuencia de varias señales
2. 8.3 SHORT TIME FOURIER TRANSFORM (STFT)
El uso de la transformada de Fourier a la hora de analizar señales no
estacionarias plantea un problema. Puesto que casi todas las señales que se generan en
la industria tienen este carácter no estacionario, este inconveniente adquiere una
especial relevancia. Este problema radica en que nuestro espectro de frecuencias puede
no ser el mismo para distintos instantes de tiempo, como es lógico pensar de una señal
no estacionaria. Nos encontraríamos por tanto ante la existencia de numerosos espectros
de frecuencia distintos dentro de una misma señal [10].
Por tanto, si representamos la señal en el dominio de la frecuencia, no estaremos
obteniendo información fidedigna de la misma. De este modo, surge la idea de la STFT.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 40
Esta nueva transformada pretende considerar la señal no estacionaria como un conjunto
de señales adyacentes, que puedan ser consideradas como cuasi estacionarias.
Se considerará un intervalo de tiempo, dividiendo la señal en una serie de
señales de este periodo, como si se tratase de una ventana de tiempo que se desliza a lo
largo de la señal original. Posteriormente se aplicará la FT a cada uno de estos
intervalos, tal y como se muestra en la ecuación (32):
∫∞
∞−−−= duftjtuhuxftSx )2exp()()(),( π
(32)
Donde )(tx es la señal a analizar y )( tuh − la ventana de tiempo que se translada
a lo largo de la señal. La ecuación (32) se conoce como “short time Fourier transform”
(STFT).
El inconveniente de la STFT es que tiene una resolución prefijada por el tamaño
del intervalo, o lo que es lo mismo, el tamaño de la “ventana temporal deslizante”
escogida. Si éste tiene una longitud infinita obtendremos una representación en
frecuencia perfecta, a costa de perder toda la información temporal (caso de la
transformada de Fourier). Conforme el intervalo se hace menor se obtiene información
en el dominio temporal, a costa de perder información en frecuencia.
Este hecho se debe al principio de incertidumbre de Heisenberg, que postula lo
siguiente:
“No se puede determinar, simultáneamente y con precisión arbitraria, ciertos
pares de variables físicas, como son, por ejemplo, la posición y el momento lineal
(cantidad de movimiento) de un objeto dado. En otras palabras, cuanta mayor certeza se
busca en determinar la posición de una partícula, menos se conoce su cantidad de
movimiento lineal y, por tanto, su velocidad” [11].
Este principio puede aplicarse al caso que se estudia en este proyecto, llegando a
la conclusión de que no puede determinarse con exactitud en un cierto punto la
información en el dominio temporal y en el de la frecuencia.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 41
El módulo de la STFT elevado al cuadrado se denomina espectrograma
(ecuación (33)).
2),(),( ftSftE x=
(33)
El espectrograma, puede ser representado en 3D (representación en cascada) o
en 2D. Esta representación, tiene las mismas limitaciones que la STFT, en cuanto a lo
que el principio de incertidumbre se refiere.
Ilustración 19 Espectrograma 3D con intervalos temporales pequeños
Ilustración 20 Espectrograma 3D con intervalos temporales grandes

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 42
En las ilustraciones 19 y 20, se tiene una representación en 3D del
espectrograma de una señal. En ellas se observa como a medida que el intervalo
temporal se hace más pequeño, se obtiene información más precisa en el dominio
temporal a costa de perder precisión en el dominio de la frecuencia y viceversa.
2.8.4 TRANSFORMADA DE HILBERT
Para superar las limitaciones impuestas por la FT y la STFT, surge la necesidad
de encontrar un método para el análisis frecuencial de señales no lineales y no
estacionarias. Es en este ámbito donde entra en juego la Transformada de Hilbert, que
se muestra como una herramienta muy potente para estudiar este tipo de señales.
La expresión analítica de la Transformada de Hilbert se viene dada por la
ecuación (34) [10]:
∫∞
∞− −= τ
ττ
πd
t
xtxH
)(1)]([
(34)
En la ilustración 21 podemos observar un ejemplo de aplicación de la
transformada de Hilbert a una señal x(t) cuadrada de 2 segundos de periodo.
Ilustración 21 Transformada de Hilbert de una onda cuadrada

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 43
En el marco del presente proyecto, se puede entender y ver la utilidad de esta
Transformada, ya que ésta nos permite obtener la envolvente de la respuesta de nuestro
sistema, utilizándola así, a modo de filtro, para posteriormente aplicarle a la señal
filtrada la Transformada Rápida de Fourier ( función de Matlab® que, permite un ahorro
computacional importante a la hora de calcular la Transformada de Fourier discreta).
2.9 FUNDAMENTOS DE LÓGICA DIFUSA
La lógica difusa es una disciplina matemática que cada vez cuenta con más
seguidores. Se basa en la idea de que, en un instante determinado, no es posible precisar
el valor concreto de una variable, si no tan solo conocer su grado de pertenencia a cada
uno de los conjuntos en los que se ha dividido el rango de variación de la variable [12].
Esta técnica es muy potente para tratar con información imprecisa, como puede
ser temperatura baja o estatura media. Esta información se divide en conjuntos borrosos
que se combinan mediante reglas para definir acciones. Los sistemas de control basados
en lógica difusa combinan variables de entrada, definidas en términos de conjuntos
borrosos, por medio de una serie de reglas que producen uno o varios valores de salida
[12].
Todas estas bondades hacen que la lógica difusa sea empleada en numerosos
ámbitos en la industria. En el siguiente cuadro se recogen las principales aplicaciones en
los distintos sectores industriales.
Productos al consumidor Sistemas Sotfware
Lavadoras Ascensores y elevadores Diagnóstico Médico
Hornos microondas Trenes Seguridad
Cámaras de video transmisiones Compresión de datos
Televisores frenos
Sistemas térmicos controles de tráfico
Traductores Máqquinas mecánicas Tabla 4 Principales campos de aplicación de la lógica difusa en la industria

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 44
En la ilustración 22 podemos observar el esquema de desarrollo tanto de la
lógica clásica como de la lógica difusa o borrosa. Mientras que la lógica clásica se
centra en el razonamiento exacto, se observa como la lógica difusa se basa en el
razonamiento aproximado.
Ilustración 22 Esquema de desarrollo de la lógica difusa en comparación con métodos clásicos [13]
Dentro de la lógica difusa aparece un concepto fundamental para comprender su
funcionamiento, este concepto es la difusividad. La difusividad se define como una
incertidumbre relacionada con el grado en el que los eventos tienen lugar, sin importar
la probabilidad de su ocurrencia. Por ejemplo, el grado de juventud de una persona es
un evento difuso sin importar que sea un elemento aleatorio [13].
Las diferencias principales entre difusividad y probabilidad, se encuentran
reflejadas en la tabla 5.
Probabilidad Difusividad
Incertidumbre no determinista Incertidumbre determinista
La incertidumbre probabilística se
disipa con el incremento del
número de muestras
La incertidumbre no se
disipa con el incremento del
número de muestras
Describe los eventos que ocurren Describe eventos ambiguos
Probabilidad vs Difusividad
Tabla 5 Probabilidad vs Difusividad [13]

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 45
En la ilustración 23, observamos cómo mientras la probabilidad se centra en
tratar de explicar la ocurrencia de un hecho aleatorio, la difusividad describe el grado
con el cual ocurre este hecho.
2.9.1 CONJUNTOS DIFUSOS Y FUNCIONES DE PERTENENCIA
El primer ejemplo que utilizó Lofti A. Zadeh (Primer ingeniero que investigó la
lógica difusa) para ilustrar el concepto de conjunto difuso, fue el de los “hombres altos”.
Según postulaba la lógica clásica el conjunto “hombres altos” estaba formado por los
hombres que superaban un valor umbral de altura predeterminado. Por ejemplo 180 cm.
Todos los hombres por encima de este umbral pertenecían al grupo, quedando así fuera
del grupo los hombres que no superaban este valor de altura. Sin embargo, no parece
muy lógico decir que un hombre que mide 179 cm no es alto mientras que otro que
mide 181 cm si lo es, ya que su altura tan sólo difiere en 2 cm [14].
El enfoque de la lógica difusa defiende que el conjunto “hombres altos” no tiene
una frontera clara de pertenencia o no al mismo. Mediante una función se define esa
frontera de transferencia de “alto” a “no alto”. Esta función asigna a cada valor de
altura un grado de pertenencia al conjunto que varía entre 0 y 1. De esta manera
podemos decir que un hombre que mida 179 cm pertenece al conjunto con un grado de
0.8 mientras que un hombre que mide 181 cm pertenece al conjunto con un grado de
0.85.
Como conclusión podríamos decir que la lógica clásica es un caso particular de
la lógica difusa, en la que esa función que define la transición es una función escalón,
como se puede apreciar en la ilustración 23 [14]:
Como se ha comentado anteriormente la teoría de conjuntos difusos contempla
la pertenencia parcial, es decir a cada elemento se le asigna un grado de pertenencia al
grupo, que puede variar entre 0 y1. El grado de pertenencia se cuantifica mediante la
función de pertenencia o característica.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 46
Ilustración 23 Lógica clásica versus lógica difusa
La forma de la función de pertenencia utilizada depende del criterio de
resolución de cada problema así como de factores geográficos, cronológicos y del punto
de vista de cada usuario. El único requisito que debe reunir una función de pertenencia
es que tome valores entre 0 y 1 y que sea continua en ese intervalo. En la ilustración 24,
se muestran algunas de las funciones de pertenencia más empleadas.
Ilustración 24 Funciones de pertenencia más empleadas: (a) Triangular, (b) Trapezoidal, (c)
Gaussiana y (d) Sigmoidal
De forma general, podemos decir que existen dos formas de determinar la
función de pertenencia asociada a un conjunto. La primera mediante el conocimiento
experto y la segunda está basada en utilizar un conjunto de datos conocidos para
determinar la función. Esta segunda aproximación será utilizada en el marco de este
proyecto.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 47
El usuario es el encargado de elegir el número de funciones de pertenencia
asociadas a una misma variable. Pero se debe tener en cuenta que a mayor número de
funciones de pertenencia, mayor complejidad computacional se tendrá. Sin embargo,
también se ganará en resolución. Por otro lado se ha de tomar en consideración que
estas funciones pueden estar solapadas o no.
El hecho de que varias funciones de pertenencia se encuentren solapadas,
refuerza el concepto de la lógica difusa ya que un elemento puede pertenecer con
distinto grado a varios conjuntos difusos al mismo tiempo [14].
2.9.2 INFERENCIA DIFUSA
Se denominan reglas difusas al conjunto de proposiciones IF, AND, OR, NOT y
THEN, que se utilizan para modelar el problema a resolver. Las reglas se expresan por
tanto en términos lingüísticos y las más simples son de la forma:
“Si v es A entonces u es B”
Donde A y B son distintos conjuntos difusos, v sería un antecedente y u un
consecuente. Una regla representa un tipo de relación entre dos conjuntos o, lo que es
lo mismo, una implicación lógica entre los mismos.
Para obtener el conjunto de reglas difusas correspondiente a un problema
concreto, hay dos caminos a seguir:
• Dejar que los datos establezcan los conjuntos difusos, es decir, ver cómo
se relacionan los datos recogidos y establecer los conjuntos y reglas en
consecuencia.
• Definir de antemano los conjuntos difusos y luego clasificar los datos en
consecuencia.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 48
Para obtener el conjunto de reglas que modelan de forma total un problema
concreto, se puede hacer mediante la combinación de todas las reglas que es posible
establecer de manera teórica. Así el número de reglas posibles para cada consecuente
vendrá dado por la ecuación:
∏=A
AnPt
;....,2,1 pn = (35)
Donde An es el conjunto difuso n y p el número de conjuntos difusos.
Sin embargo aunque formalmente cada consecuente podrá tener Pt reglas
difusas, puede haber algunas que no tengan sentido físico y otras que no se ajusten a las
particularidades del problema a resolver. Por esos motivos deberemos seleccionar de
entre las reglas teóricamente disponibles, el conjunto más adecuado al problema a
resolver [12].
2.9.3 DIAGRAMA DE BLOQUES DE UN SISTEMA DE CONTROL
BASADO EN LÓGICA DIFUSA.
El diagrama de bloques de un sistema de clasificación basado en lógica difusa se
puede observar en la ilustración 25:
Ilustración 25 Diagrama de bloques de un sistema de control basado en lógica difusa
El sistema de clasificación está compuesto por los siguientes bloques:
• Bloque difusor: En este bloque, a cada variable de entrada se le asigna
un grado de pertenecía a cada uno de los conjuntos difusos que se han
considerado. Esto se lleva a cabo mediante las funciones de pertenencia
que hemos asociado a cada uno de los conjuntos difusos. Las variables

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 49
de entrada a este bloque son valores concretos de las variables de entrada
y las variables de salida son grados de pertenencia a los distintos
conjuntos difusos del problema.
• Bloque de inferencia: En este bloque, mediante la ayuda de los
mecanismos de inferencia, se relacionan los conjuntos difusos de entrada
y de salida. Representa a las reglas difusas del sistema. Las variables de
entrada a este bloque son conjuntos difusos, o lo que es lo mismo, grados
de pertenencia, mientras que las variables de salida son de nuevo
conjuntos difusos esta vez asociados a las variables de salida del
problema.
• Bloque desdifusor: En este bloque, a partir de los conjuntos difusos
salientes del mecanismo de inferencia y a partir de los métodos
matemáticos de desdifusión, se obtienen valores concretos de las
variables de salida.
2.9.4 MECANISMOS DE INFERENCIA.
Los mecanismos de inferencia son aquellos que mediante la utilización de
principios de inferencia difusa, relaciona los conjuntos difusos de entrada con los
conjuntos difusos de salida.
En el bloque de inferencia se realiza la traducción matemática de las reglas
difusas. Como ya se mencionó anteriormente, las reglas más simples para diseñar un
sistema de clasificación basado en lógica difusa son del tipo [14]:
“Si v es A entonces u es B”
El conjunto difuso de salida B, es el resultado de la agregación de todas las
reglas que componen la regla base, es decir, de la combinación de los conjuntos difusos
resultantes de cada una de las reglas.
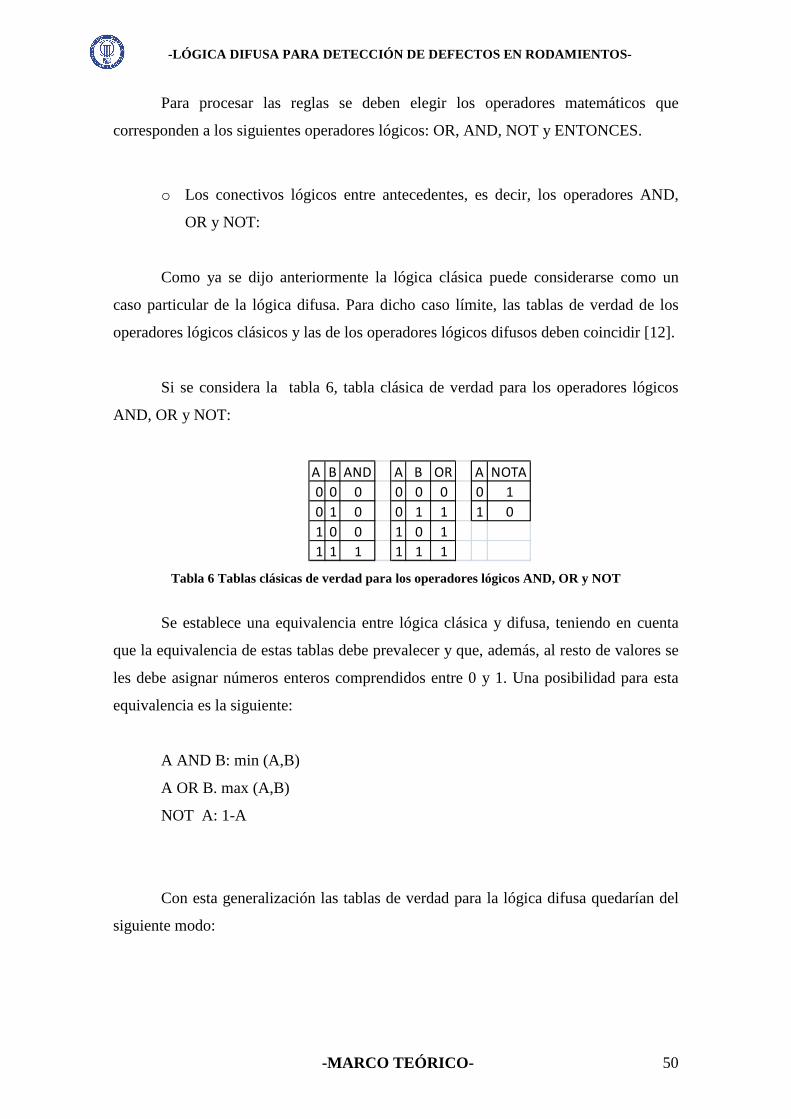
-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 50
Para procesar las reglas se deben elegir los operadores matemáticos que
corresponden a los siguientes operadores lógicos: OR, AND, NOT y ENTONCES.
o Los conectivos lógicos entre antecedentes, es decir, los operadores AND,
OR y NOT:
Como ya se dijo anteriormente la lógica clásica puede considerarse como un
caso particular de la lógica difusa. Para dicho caso límite, las tablas de verdad de los
operadores lógicos clásicos y las de los operadores lógicos difusos deben coincidir [12].
Si se considera la tabla 6, tabla clásica de verdad para los operadores lógicos
AND, OR y NOT:
A B AND A B OR A NOTA
0 0 0 0 0 0 0 1
0 1 0 0 1 1 1 0
1 0 0 1 0 1
1 1 1 1 1 1 Tabla 6 Tablas clásicas de verdad para los operadores lógicos AND, OR y NOT
Se establece una equivalencia entre lógica clásica y difusa, teniendo en cuenta
que la equivalencia de estas tablas debe prevalecer y que, además, al resto de valores se
les debe asignar números enteros comprendidos entre 0 y 1. Una posibilidad para esta
equivalencia es la siguiente:
A AND B: min (A,B)
A OR B. max (A,B)
NOT A: 1-A
Con esta generalización las tablas de verdad para la lógica difusa quedarían del
siguiente modo:

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 51
A B min(A,B) A B max(A,B) A 1-A
0 0 0 0 0 0 0 1
0 1 0 0 1 1 1 0
1 0 0 1 0 1
1 1 1 1 1 1 Tabla 7 Tablas de verdad para lógica difusa
Como se puede comprobar, se siguen cumpliendo las tablas de verdad, como
era de esperar según lo enunciado en el principio de este apartado. La misma
información se encuentra recogida en la ilustración 26.
Ilustración 26 Actuación de los operadores AND, OR y NOT en lógica clásica y difusa o El operador lógico ENTONCES, que representa implicación:
El conectivo ENTONCES representa implicación entre el antecedente y el
consecuente. Cada regla puede tener un peso distinto a otras, es decir, que la salida de
los antecedentes sea multiplicada por un factor que prefija el usuario antes de ver el
resultado en los consecuentes [12].

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-MARCO TEÓRICO- 52
La unión del resultado de todas las reglas es la agregación. Una vez evaluadas
todas las reglas y obtenidos todos los conjuntos difusos de salida modificados, hay que
realizar la agregación de todas las reglas para obtener un resultado único de la actuación
de todas ellas. Esta agregación es una unión lógica que se define como máximo o suma
algebraica de los conjuntos de salida, obteniéndose así un conjunto de salida único,
asociado a la variable de salida [14].
2.9.5 MÉTODOS DE DESDIFUSIÓN
La entrada al bloque desdifusor es el conjunto difuso de salida, resultado del
bloque de inferencia y la salida es un valor concreto. Para obtener, a partir del conjunto
difuso de salida, un resultado concreto, se aplican métodos matemáticos. Entre estos
métodos matemáticos los más destacados son [14]:
• Método del máximo: Se elige como valor para la variable de salida
aquél para el cual la función de pertenencia del conjunto difuso de salida
es máxima.
• Método del centroide: Utiliza como salida del sistema el centro de
gravedad de la función de pertenencia del conjunto de salida.
• Método de la altura: Se calcula para cada regla el centro de gravedad
del conjunto difuso de la salida y después se calcula la salida del sistema
como la media ponderada.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-SISTEMA EXPERIMENTAL- 53
3. SISTEMA EXPERIMENTAL
3.1 INTRODUCCIÓN.
En el siguiente capítulo se explicara el método seguido para la obtención de las
señales de vibración de los rodamientos. Como ya se comento en la introducción, la
obtención de las señales no forma parte de este proyecto, sino que fueron medidas
como parte de un trabajo dirigido en el departamento de Ingeniería Mecánica de la
Universidad Carlos III de Madrid, realizado por el alumno Iván Martínez Aldana [15].
3.2 EQUIPO DE ENSAYO
A continuación se describirán brevemente todos los equipos implicados en el
sistema experimental:
• MÁQUINA DE ENSAYO
Para obtener las señales de vibración, se empleó la el banco de ensayos “Rotor
Kit MFS 2004” [15] que puede observarse en la ilustración 27.
Ilustración 27 Máquina de ensayo de rodamientos
Esta máquina fue diseñada por la empresa Spectra Quest, para el ensayo de
rodamientos y elementos rotatorios, pudiendo ser utilizada a altas velocidades.
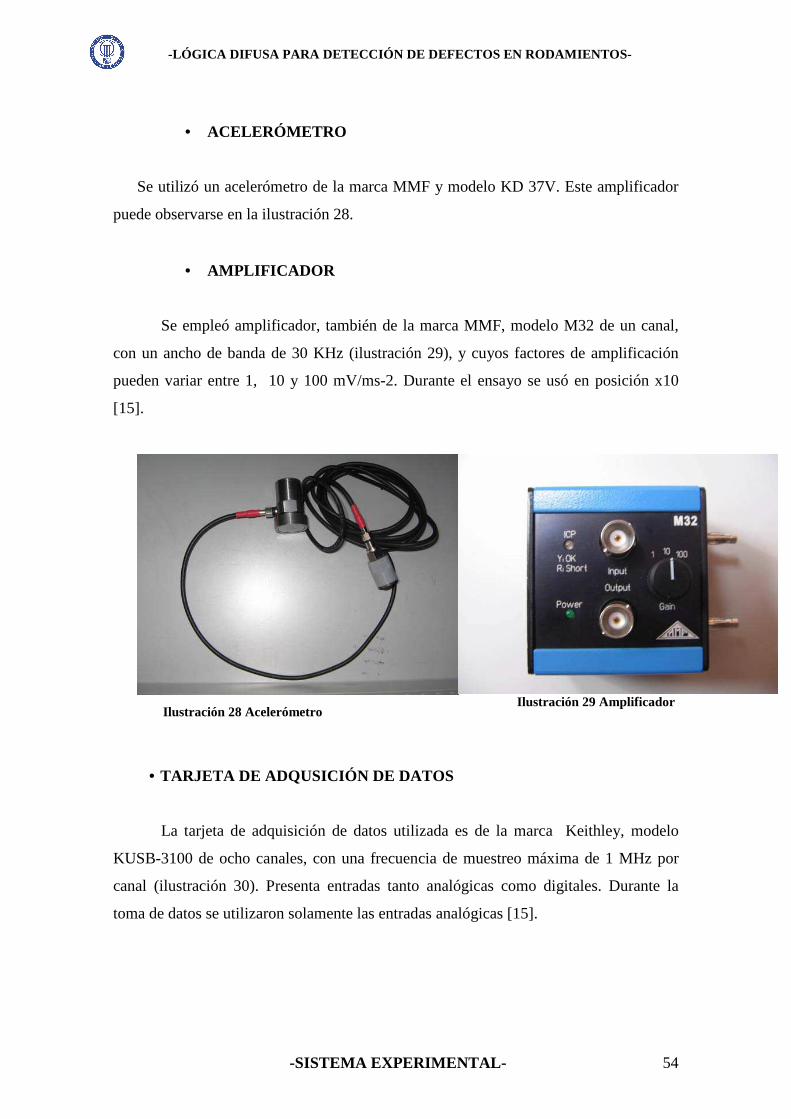
-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-SISTEMA EXPERIMENTAL- 54
• ACELERÓMETRO
Se utilizó un acelerómetro de la marca MMF y modelo KD 37V. Este amplificador
puede observarse en la ilustración 28.
• AMPLIFICADOR
Se empleó amplificador, también de la marca MMF, modelo M32 de un canal,
con un ancho de banda de 30 KHz (ilustración 29), y cuyos factores de amplificación
pueden variar entre 1, 10 y 100 mV/ms-2. Durante el ensayo se usó en posición x10
[15].
Ilustración 28 Acelerómetro
Ilustración 29 Amplificador
• TARJETA DE ADQUSICIÓN DE DATOS
La tarjeta de adquisición de datos utilizada es de la marca Keithley, modelo
KUSB-3100 de ocho canales, con una frecuencia de muestreo máxima de 1 MHz por
canal (ilustración 30). Presenta entradas tanto analógicas como digitales. Durante la
toma de datos se utilizaron solamente las entradas analógicas [15].

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-SISTEMA EXPERIMENTAL- 55
Ilustración 30 Tarjeta de adquisición
de datos
Ilustración 31 Rodamiento ER10K
• RODAMIENTO DE ENSAYO
Se emplearon rodamientos de una hilera de bolas ER10K de la empresa MB
Manufacturing (ilustración 31). En concreto se emplearon 4 rodamientos. Uno en
perfectas condiciones, otro con fallo en bola, otro con fallo en pista interna y finalmente
uno con fallo en la pista externa.
Las características principales de este rodamiento se muestran en la tabla 8.
Diámetro interior [mm] 15,875
Diámetro exterior [mm] 46,990
Diámetro medio [mm] 33,490
Número de bolas 8
Diámetro de las bolas [mm] 7,940
Ángulo de contacto [°] 0
Tabla 8 Características rodamiento ER10K
3.3 ADQUISICIÓN DE DATOS
Para la adquisición de datos se estableció una frecuencia de muestreo de 5000
Hz. Esta frecuencia indica el número de muestras que toma en un segundo, en este caso
serían 5000 muestras por segundo [15]. Del mismo modo se tomaron medidas para los
valores de velocidad del eje de 600 rpm, 1200 rpm y 1800 rpm. El motivo es observar
cómo afecta la velocidad en las señales producidas por los rodamientos con y sin
defecto.
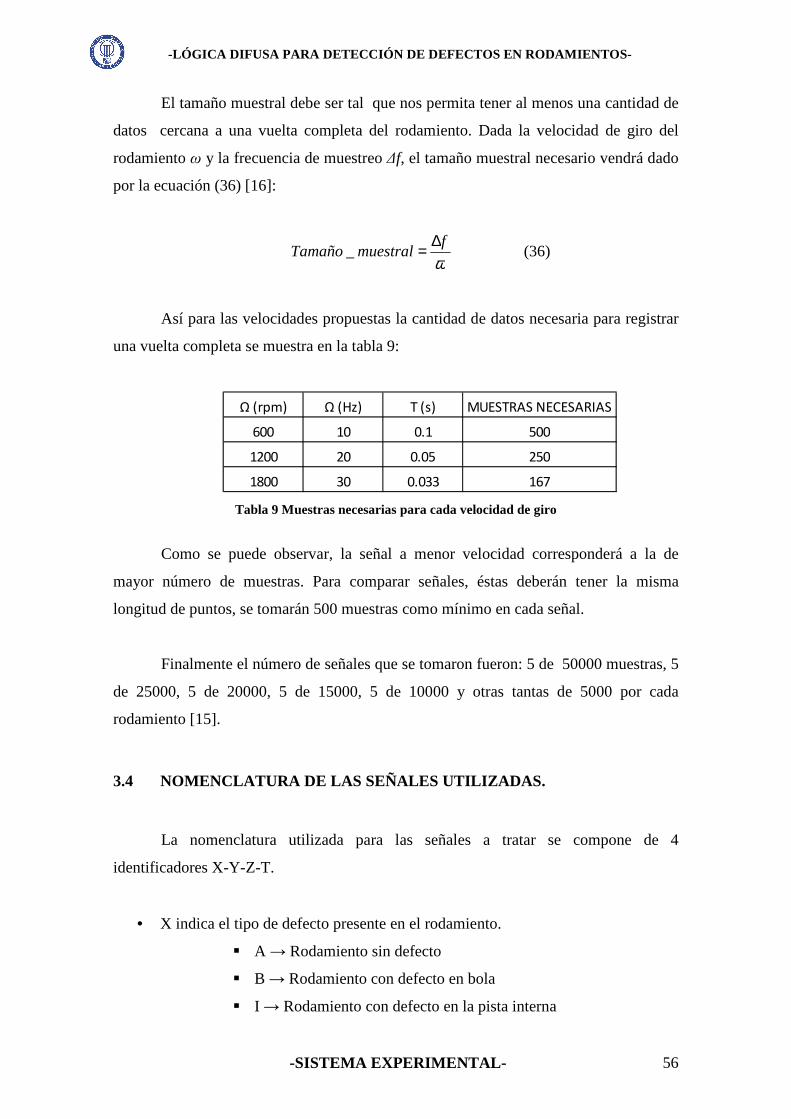
-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-SISTEMA EXPERIMENTAL- 56
El tamaño muestral debe ser tal que nos permita tener al menos una cantidad de
datos cercana a una vuelta completa del rodamiento. Dada la velocidad de giro del
rodamiento ω y la frecuencia de muestreo ∆f, el tamaño muestral necesario vendrá dado
por la ecuación (36) [16]:
ωf
muestralTamaño∆=_ (36)
Así para las velocidades propuestas la cantidad de datos necesaria para registrar
una vuelta completa se muestra en la tabla 9:
Ω (rpm) Ω (Hz) T (s) MUESTRAS NECESARIAS
600 10 0.1 500
1200 20 0.05 250
1800 30 0.033 167 Tabla 9 Muestras necesarias para cada velocidad de giro
Como se puede observar, la señal a menor velocidad corresponderá a la de
mayor número de muestras. Para comparar señales, éstas deberán tener la misma
longitud de puntos, se tomarán 500 muestras como mínimo en cada señal.
Finalmente el número de señales que se tomaron fueron: 5 de 50000 muestras, 5
de 25000, 5 de 20000, 5 de 15000, 5 de 10000 y otras tantas de 5000 por cada
rodamiento [15].
3.4 NOMENCLATURA DE LAS SEÑALES UTILIZADAS.
La nomenclatura utilizada para las señales a tratar se compone de 4
identificadores X-Y-Z-T.
• X indica el tipo de defecto presente en el rodamiento.
� A → Rodamiento sin defecto
� B → Rodamiento con defecto en bola
� I → Rodamiento con defecto en la pista interna

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-SISTEMA EXPERIMENTAL- 57
� O→ Rodamiento con defecto en la pista externa
• Y nos da información sobre la velocidad de giro del motor:
� 10 → f=10Hz
� 20 → f=20Hz
� 30 → f=30Hz
• Z indica el número de muestras tomadas para la señal en cuestión, puede variar
entre los siguientes valores:
� 5000 muestras
� 10000 muestras
� 15000 muestras
� 20000 muestras
� 25000 muestras
� 50000 muestras
• T indica el número de la señal, ya que se tomaron 5 señales para cada caso.
De esta manera, por ejemplo la señal I-30-5000-2 sería la segunda señal tomada
con 5000 muestras para el rodamiento con defecto en la pista interna girando a una
frecuencia de 30 Hz. Esta señal puede observarse en la ilustración 32:
Ilustración 32 Señal I-30-5000-2

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 58
4. DESARROLLO DEL PROYECTO
4.1 INTRODUCCIÓN
Como ya se ha mencionado, cuando hablamos sobre el sistema experimental del
proyecto, los rodamientos utilizados son de la marca MB manufacturing más
concretamente del modelo ER10K. Como punto de partida y primer patrón de
comparación, vamos a recuperar las características principales de este modelo de
rodamiento así como las expresiones analíticas de las frecuencias naturales de fallo de
un rodamiento, que venían dadas por la tabla 8 y las ecuaciones (19), (20), (21) y (22)
respectivamente, para calcular precisamente estas frecuencias naturales de fallo para
nuestro modelo concreto de rodamiento.
= −Pd
BdRPMFTF
φcos1
2
1
60 [Hz] (19)
+
=Pd
BdNbRPMBPFI
φcos1
260 [Hz] (20)
−
=Pd
BdNbRPMBPFO
φcos1
260 [Hz] (21)
−
=
2
22cos1
260 d
d
d
d
P
B
B
PRPMBSF
φ [Hz] (22)
Estos cálculos se han realizado mediante un programa diseñado para el efecto,
obteniéndose los resultados de la tabla 10:
Frecuencia giro [Hz] FTF BPFI BPFO BSF
10 3,815 49,483 30,517 19,904
20 7,629 98,967 61,033 39,808
30 11,444 148,450 91,550 59,712 Tabla 10 Frecuencias naturales de fallo para cada frecuencia de giro

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 59
Con el fin de hacer estos valores independientes de la frecuencia de giro del eje,
se han creado los parámetros adimensionales que se muestran en la tabla 11:
FTF/Frecuencia giro BPFI/Frecuencia giro BPFO/Frecuencia giro BSF/Frecuencia giro
0,381 4,948 3,052 1,990 Tabla 11 Frecuencias naturales de fallo entre frecuencia de giro
Dado que los parámetros coinciden sea cual sea la velocidad de giro del eje,
debido a la linealidad de las expresiones analíticas de las frecuencias naturales de fallo
con la velocidad, se presentan en una única columna.
4.2 PROCESAMIENTO DE LAS SEÑALES
El objetivo de este apartado es evaluar la capacidad de cada uno de los métodos
explicados en el capítulo anterior para detectar la existencia de defectos en los
rodamientos.
Para conseguir este propósito, se tomarán muestras de cada tipo de rodamiento y
se intentará identificar la frecuencia correspondiente con el defecto presente en estos
rodamientos por los diferentes métodos que estudiamos a lo largo del marco teórico de
este proyecto.
En primer lugar trabajaremos con la transformada rápida de Fourier (FFT: Fast
Fourier Transform), función de Matlab® que, permite un ahorro computacional
importante a la hora de calcular la Transformada de Fourier discreta. Dando paso
posteriormente al procesamiento previo con la transformada de Hilbert. Se pretende
demostrar que, con este segundo método, se obtienen mejores resultados que con la FFT
para el análisis de vibraciones de rodamientos con defectos.
Todas estas evaluaciones serán realizadas mediante Matlab®.
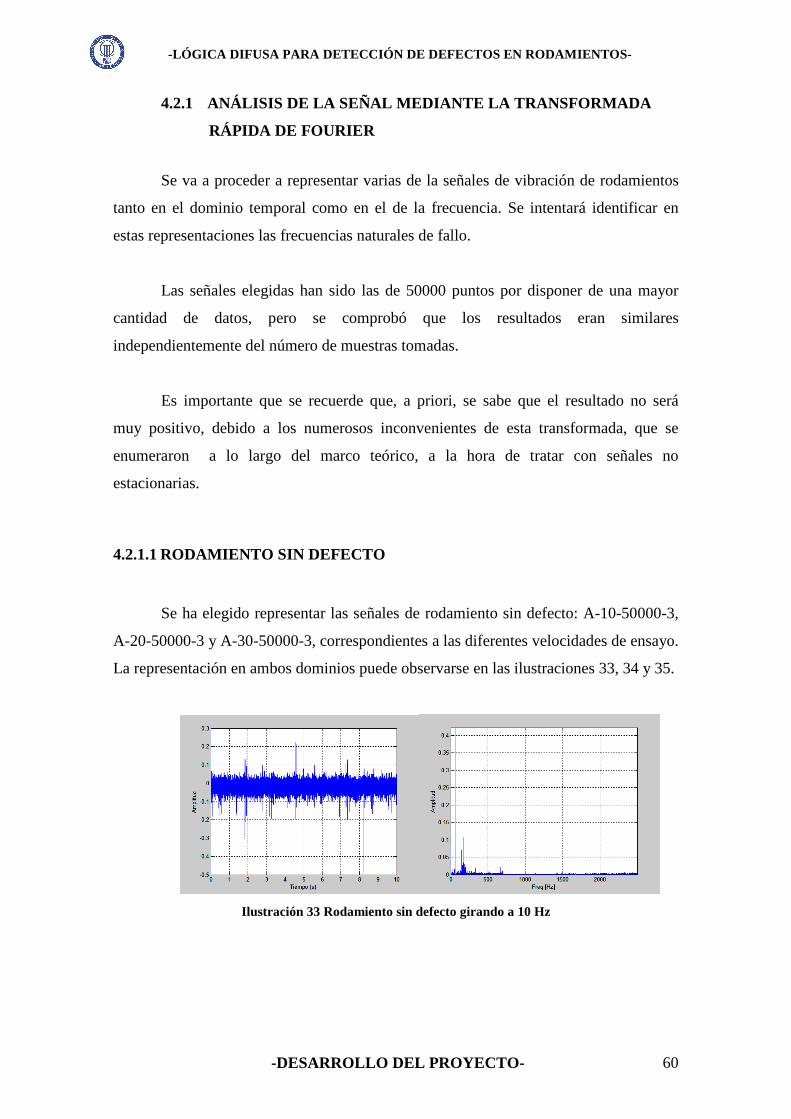
-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 60
4.2.1 ANÁLISIS DE LA SEÑAL MEDIANTE LA TRANSFORMADA
RÁPIDA DE FOURIER
Se va a proceder a representar varias de la señales de vibración de rodamientos
tanto en el dominio temporal como en el de la frecuencia. Se intentará identificar en
estas representaciones las frecuencias naturales de fallo.
Las señales elegidas han sido las de 50000 puntos por disponer de una mayor
cantidad de datos, pero se comprobó que los resultados eran similares
independientemente del número de muestras tomadas.
Es importante que se recuerde que, a priori, se sabe que el resultado no será
muy positivo, debido a los numerosos inconvenientes de esta transformada, que se
enumeraron a lo largo del marco teórico, a la hora de tratar con señales no
estacionarias.
4.2.1.1 RODAMIENTO SIN DEFECTO
Se ha elegido representar las señales de rodamiento sin defecto: A-10-50000-3,
A-20-50000-3 y A-30-50000-3, correspondientes a las diferentes velocidades de ensayo.
La representación en ambos dominios puede observarse en las ilustraciones 33, 34 y 35.
Ilustración 33 Rodamiento sin defecto girando a 10 Hz

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 61
Ilustración 34 Rodamiento sin defecto girando a 20 Hz
Ilustración 35 Rodamiento sin defecto girando a 30 Hz
En primer lugar, se puede observar cómo, a medida que vamos aumentando la
frecuencia de giro del eje, aumenta también la amplitud de las vibraciones en el dominio
temporal. La causa de esto puede ser el ruido, que se ve incrementado al aumentar la
velocidad del eje.
En la ilustración 36 se ha realizado un zoom al espectro de frecuencias de la
señal A-20-50000-3 del rodamiento en buenas condiciones de funcionamiento girando a
20 Hz y como se puede comprobar, para esta frecuencia en la que se esperaba encontrar
un pico entre los 7 y los 8 Hz, es imposible detectar este pico.
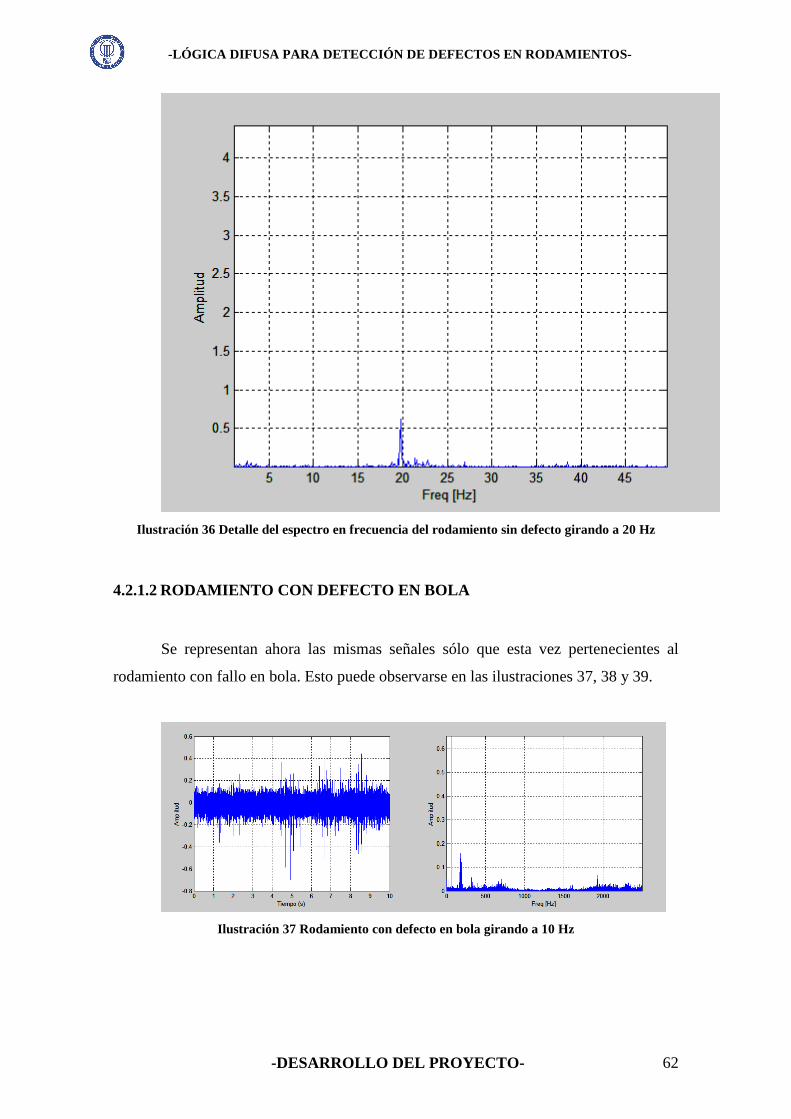
-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 62
Ilustración 36 Detalle del espectro en frecuencia del rodamiento sin defecto girando a 20 Hz
4.2.1.2 RODAMIENTO CON DEFECTO EN BOLA
Se representan ahora las mismas señales sólo que esta vez pertenecientes al
rodamiento con fallo en bola. Esto puede observarse en las ilustraciones 37, 38 y 39.
Ilustración 37 Rodamiento con defecto en bola girando a 10 Hz

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 63
Ilustración 38 Rodamiento con defecto en bola girando a 20 Hz
Ilustración 39 Rodamiento con defecto en bola girando a 30 Hz
Se vuelve a apreciar, que a medida que aumenta la frecuencia de giro del eje
aumenta la amplitud de la vibración. Además se observa que para las frecuencias más
altas de giro del eje, aparecen picos de vibración en frecuencias medias (0-750 Hz) y
altas (15000- 25000 Hz).
Si se vuelve a centrar la atención en el espectro de la señal procedente del
rodamiento con fallo en bola girando a 20 Hz (ilustración 42), puede verse, cómo
también en este caso no es posible identificar la frecuencia de defecto esperada que
estaría alrededor de los 40 Hz.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 64
Ilustración 40 Detalle del espectro en frecuencia del rodamiento con defecto en bola girando a 20
Hz
4.2.1.3 RODAMIENTO CON DEFECTO EN PISTA INTERNA
Se repite el procedimiento anterior esta vez con las señales I-10-50000-3, I-20-
50000-3 e I-30-50000-3 (ilustraciones 43, 44 y 45).
Ilustración 41 Rodamiento con defecto en pista interna girando a 10 Hz

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 65
Ilustración 42 Rodamiento con defecto en pista interna girando a 20 Hz
Ilustración 43 Rodamiento con defecto en pista interna girando a 30 Hz
Se repite el comportamiento en el sentido de que, al aumentar la frecuencia de
giro, aumenta la amplitud de las vibraciones.
De nuevo en el detalle (ilustración 44) es imposible identificar la frecuencia
natural de fallo que para esta señal debería situarse en torno a los 99 Hz.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 66
Ilustración 44 Detalle del espectro en frecuencia del rodamiento con defecto en pista interna a 20
Hz
4.2.1.4 RODAMIENTO ON DEFECTO EN PISTA EXTERNA.
Se procede en último lugar con las señales O-10-50000-3, O-20-50000-3 y O-
30-50000-3. Correspondientes al rodamiento con el defecto localizado en su pista
externa (ilustraciones 45, 46 y 47).
Ilustración 45 Rodamiento con defecto en pista externa girando a 10 Hz

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 67
Ilustración 46 Rodamiento con defecto en pista externa girando a 20 Hz
Ilustración 47 Rodamiento con defecto en pista externa girando a 30 Hz
Nuevamente es imposible identificar en el detalle (ilustración 48), la frecuencia
natural de fallo esperada para esta señal.
Ilustración 48 Detalle del espectro en frecuencia del rodamiento con defecto en pista externa a 20
Hz
-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 68
4.2.1.5 CONCLUSIONES DEL USO DE LA REPRESENTACIÓN TEMPORAL Y
LA TRANSFORMADA DE FOURIER.
Mediante la representación de la señal en el dominio del tiempo, no se obtiene
información útil para identificar un tipo concreto de defecto, debido al elevado nivel de
ruido de la señal que además se ve incrementado con la velocidad de giro del eje. No
obstante, esta representación puede indicarnos la presencia de algún defecto ya que la
amplitud de las vibraciones es mucho mayor en los rodamientos dañados. Siendo el
rodamiento con defecto en pista externa el que muestra un comportamiento más
parecido en este sentido a un rodamiento normal.
Por otro lado se ha comprobado, como la Transformada de Fourier se muestra
ineficaz a la hora de intentar localizar las frecuencias naturales de fallo.
4.2.2 TRANSFORMADA DE HILBERT
En este apartado se muestra la representación en el dominio del tiempo de las
señales anteriores, a las que posteriormente se les aplica la transformada de Hilbert
como método de filtrado, finalmente se aplica la transformada rápida de Fourier sobre
las envolventes generadas para obtener los espectros de frecuencias.
4.2.2.1 RODAMIENTO SIN DEFECTO
Se representan las señales del apartado 4.2.1.1 correspondientes al rodamiento
sin defecto girando a 10, 20 y 30 Hz (ilustraciones 49, 50 y 51).

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 69
Ilustración 49 Rodamiento sin defecto girando a 10 Hz
Ilustración 50 Rodamiento sin defecto girando a 20 Hz
Ilustración 51 Rodamiento sin defecto girando a 30 Hz
Cuando se habló de la Transformada de Fourier se comentó que, al aumentar la
frecuencia de giro del eje, lo hacía también el nivel de ruido. Se puede observar también
que, ahora, al aumentar la frecuencia de giro, las componentes del espectro de
frecuencias en bajas frecuencias tienen amplitudes significativamente más altas. Parece
por tanto, a priori, que la señal de 30 Hz se encuentra mejor filtrada que sus respectivas
de 10 y 20 Hz.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 70
En un análisis más detallado del espectro de frecuencias de la señal A-30-50000-
3 (ilustración 52), se distingue claramente un pico para la frecuencia de giro del motor
(30Hz) y varios picos más pequeños para los múltiplos de esta frecuencia (60, 90…).
Ilustración 52 Detalle del espectro en frecuencia del rodamiento sin defecto girando a 30 Hz
Este fenómeno también puede apreciarse en las señales de 10 y 20 Hz (en las
ilustraciones 53 y 54 respectivamente), pero se observa cómo, a medida que bajamos la
velocidad del eje, estos picos se van igualando cada vez más al nivel de ruido. Se puede
decir por tanto, que éste método será más fiable cuanto mayor sea la frecuencia de giro
del motor.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 71
Ilustración 53 Detalle del espectro en frecuencia del rodamiento sin defecto girando a 20 Hz
Ilustración 54 Detalle del espectro en frecuencia del rodamiento sin defecto girando a 10 Hz

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 72
4.2.2.2 RODAMIENTO CON DEFECTO EN BOLA
Lo citado anteriormente vuelve a repetirse con las señales correspondientes al
rodamiento con defecto en bola (ilustraciones 55, 56 y 57).
Ilustración 55 Rodamiento con defecto en bola girando a 10 Hz
Ilustración 56 Rodamiento con defecto en bola girando a 20 Hz
Ilustración 57 Rodamiento con defecto en bola girando a 30 Hz
Se vuelve observar que los espectros de frecuencia obtenidos parecen más claros
a medida que aumentamos la frecuencia de giro del eje. Por este motivo, se elige la
señal correspondiente a 30 Hz para realizar un análisis en profundidad (ilustración 58).

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 73
Ilustración 58 Detalle del espectro en frecuencia del rodamiento con defecto en bola girando a 30
Hz
En este análisis en profundidad se ha procedido a identificar la posición de los 5
picos de frecuencia más importantes, con el objetivo de conseguir un patrón
representativo del estado del rodamiento. En la tabla 12 se presentan los valores
hallados y ordenados según su amplitud, para la señal representada en la ilustración 60.
Frecuencia [Hz]
118,4
22,7
95,7
236,9
59,2 Tabla 12 Posición de los 5 picos de frecuencia más importantes. Rodamiento con defecto en bola a
30 Hz
Una vez identificadas las posiciones de los picos de frecuencia más importantes,
se procede a su análisis.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 74
Comenzando por la frecuencia más pequeña, es decir, 22.7 Hz, se ve de manera
trivial que se trata de una frecuencia menor que la frecuencia de giro del eje (30 Hz).
Con esto podemos descartar que se trate de una frecuencia de defecto. Recuperando la
tabla de las frecuencias naturales de fallo, se puede observar que esta frecuencia es
múltiplo de la frecuencia de giro de la jaula o lo que es lo mismo:
FTFHz 27.22 ≈ (37)
La segunda frecuencia más pequeña es 59.2 Hz, es evidente que se trata de la
frecuencia natural de defecto en bolas (59.712 Hz).
La siguiente frecuencia es 95.7 Hz, de la que podemos deducir que representa el
segundo múltiplo de la frecuencia natural menos la primera frecuencia de 27.7Hz, que
expresaba el segundo múltiplo de la frecuencia de giro de la jaula. Es decir:
FTFBSFHz 227.95 −≈ (38)
Por último 118.4 y 236.9 Hz son respectivamente el segundo y el cuarto
múltiplo de la frecuencia natural de fallo en bola. Todo lo anterior se recoge en la tabla
13:
Frecuencia [Hz] Significado
118,4 2BSF
22,7 2FTF
95,7 2BSF-2FTF
236,9 4BSF
59,2 BSF Tabla 13 Análisis de frecuencias de la señal B-30-50000-3

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 75
4.2.2.3 RODAMIENTO CON DEFECTO EN PISTA INTERNA
Se vuelve a repetir el proceso para las señales I-10-50000-3, I-20-50000-3 e I-
30-50000-3 (ilustraciones 59, 60 y 61).
Ilustración 59 Rodamiento con defecto en pista interna girando a 10 Hz
Ilustración 60 Rodamiento con defecto en pista interna girando a 20 Hz
Ilustración 61 Rodamiento con defecto en pista interna girando a 30 Hz
Si se amplían cada uno de estos espectros de frecuencia observamos que se
distinguen muy bien las frecuencias de vibración del eje (ilustraciones 62, 63 y 64).

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 76
Ilustración 62 Detalle del espectro en frecuencia del rodamiento con defecto en pista interna a 10
Hz
Ilustración 63 Detalle del espectro en frecuencia del rodamiento con defecto en pista interna a 20
Hz

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 77
Ilustración 64 Detalle del espectro en frecuencia del rodamiento con defecto en pista interna a 30
Hz
Se vuelve a analizar más en profundidad la señal de 30 Hz (ilustración 64), para
analizar sus picos de frecuencia más significativos. En principio se podría hacer una
interpretación parecida a la del apartado anterior, es decir, pensar que el pico en 60 Hz
se trata del segundo armónico de la frecuencia de giro, pero si se observa en detalle la
señal, se puede apreciar que en todos los múltiplos de 30 Hz hay varios picos, esto
cobra bastante lógica si se contempla la opción de que exista la frecuencia de giro del
motor y una frecuencia de defecto en bola de 59.73 Hz.
Si se desciende hasta el séptimo pico, se obtiene una frecuencia de 147.3 Hz que
representa la frecuencia natural de fallo en pista interna. Los resultados se muestran en
tabla 14.
Frecuencia [Hz] Significado
59,5 BSF
87,8 3FREQ MOTOR
28,3 FREQ MOTOR
59,4 BSF
206,7 BPFI+BSF
294,5 2BPFI
147,3 BPFI Tabla 14 Análisis de frecuencias I-30-50000-3

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 78
4.2.2.4 RODAMIENTO CON DEFECTO EN PISTA EXTERNA
Finalmente se procede de igual modo con las señales correspondientes al
rodamiento con defecto en pista externa (ilustraciones 65, 66 y 67).
Ilustración 65 Rodamiento con defecto en pista externa girando a 10 Hz
Ilustración 66 Rodamiento con defecto en pista externa girando a 20 Hz
Ilustración 67 Rodamiento con defecto en pista externa girando a 30 Hz
Para las señales de 20 y 30 Hz puede distinguirse perfectamente las frecuencias
naturales de defecto en pista externa a 60 y 90 Hz respectivamente. Este es exactamente

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 79
el resultado esperado. Sin embargo para la señal de 10 Hz el pico esperado a 30Hz no se
muestra con tanta claridad, quedando otra vez demostrado, como ya adelantamos que el
método se muestra más eficaz a mayor velocidad del eje.
Ilustración 68 Detalle del espectro en frecuencia del rodamiento con defecto en pista externa a 10
Hz
Ilustración 69 Detalle del espectro en frecuencia del rodamiento con defecto en pista externa a 20
Hz

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 80
Ilustración 70 Detalle del espectro en frecuencia del rodamiento con defecto en pista externa a 30
Hz
Volviendo a analizar los picos de frecuencia más significativos de la señal a 30
Hz obtenemos la tabla 15:
Frecuencia [Hz] Significado
90,7 BPFO
181,3 2BPFO
90,6 3FREQ MOTOR
362,6 4BPFO
272 3BPFO Tabla 15 Análisis de frecuencias O-30-50000-3
Puede identificarse claramente la BPFO así como sus sucesivos múltiplos.
4.2.2.5 CONCLUSSIONES DEL USO DE LA TRANSFORMADA DE HILBERT.
Como primera conclusión puede extraerse que la transformada de Hilbert,
aplicándole posteriormente la transformada de Fourier, se muestra como una
herramienta mucho más potente que la representación temporal ya la transformada de

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 81
Fourier para el análisis frecuencial de señales de vibración. Básicamente lo que se está
haciendo es un filtrado de la señal antes de obtener las frecuencias por Fourier.
Se observa además que, mediante esta transformada se obtienen mejores
resultados cuanto mayor es la velocidad de giro del eje.
De este modo los resultados obtenidos aplicando la transformada de Hilbert son
los que se recogen en tabla 16. Se ha calculado el error cometido al estimar la
frecuencia de defecto, la amplitud del pico a dicha frecuencia y la posición que ocupa
la amplitud de ese pico a lo largo de todo el espectro de frecuencias (el pico más alto de
la señal ocupará la posición 1).
Defecto Frecuenci de giro [Hz] Frecuencia de defecto encontrada Valor teórico Error % Amplitud Posición
10 19,7 19,90399217 1,024881 0,056439 20
20 39 39,80798434 2,029704 29,759 7
30 59,2 59,71197651 0,85741 199,62 5
10 48,8 49,48342789 1,381125 4,2779 4
20 97,7 98,96685578 1,280081 94,704 6
30 147,3 148,4502837 0,774861 435,78 7
10 30,3 30,51657211 0,709687 0,14394 4
20 60,5 61,03314422 0,873532 49,957 1
30 90,7 91,54971633 0,928147 154,4 1
Bola
Pista interna
Pista externa
Tabla 16 Frecuencias encontradas mediante transformada de Hilbert
A la vista de estos resultados se observa que el método se muestra con mejor
comportamiento para el rodamiento con defecto en pista externa. Desde el punto de
vista de que el error cometido es menor que para cualquier otro de los casos.
Además, se confirma lo citado anteriormente. Cuando se reduce la velocidad del
eje, empeoran los resultados. El caso que muestra este extremo es el del rodamiento con
fallo en bola a velocidad de 10 Hz. Encontramos su frecuencia natural de defecto en la
posición número 20.
En el peor de los casos el error cometido al estimar la frecuencia de defecto ha
sido de un 2.03% con un promedio muy bajo de tan sólo 1.09%. Estos porcentajes de
error tan bajos hacen pensar que los rodamientos empleados no presentan defectos
incipientes sino con un cierto nivel de desarrollo.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 82
4.3 CLASIFICADOR BASADO EN LÓGICA DIFUSA.
4.3.1 INTRODUCCIÓN.
En esta sección se desarrollará un programa basado en lógica difusa. Este
programa tendrá la misión de concretar si el rodamiento sometido a estudio se trata de:
• Rodamiento en buenas condiciones.
• Rodamiento con defecto en bola.
• Rodamiento con defecto en pista externa.
• Rodamiento con defecto en pista interna.
Como en el procesamiento de la señal se obtuvieron mejores resultados para las
señales de 30 Hz. Se ha decidido diseñar este clasificador, basándonos en las señales
obtenidas a dicha frecuencia.
Para su funcionamiento, el programa se nutrirá de una serie de variables de
entrada que consistirán en las 3 frecuencias, correspondientes a los 3 picos más altos de
los espectros de frecuencia de las envolventes comprendidos entre 90 y 300 Hz. El
motivo de coger los picos en este rango de frecuencias, es que, el parámetro que más
nos compromete la clasificación es la frecuencia natural de fallo en pista interna (BPFI),
al tratarse ésta del valor más alto. De esto se puede deducir que el patrón más
reconocible para la identificación de los distintos tipos de rodamientos se encontrará
entre lo 90 y los 300Hz. Es decir, aproximadamente entre BPFO y 2BPFI.
Tras su ejecución se obtendrán, como variables de salida, las probabilidades de
que el rodamiento sometido a estudio pertenezca a uno u otro grupo.
Para la elaboración del programa clasificador, al igual que para el procesamiento
de la señal, se ha empleado el programa de cálculo Matlab®. Este programa cuenta con
un potente asistente para la elaboración de clasificadores difusos.
4.3.2 EDITOR DE CLASIFICADORES DIFUSOS (FIS EDITOR)
Este asistente se activa al introducir en Matlab® el comando “fuzzy”. Su manejo
es bastante intuitivo y nos evita una programación compleja a la hora de desarrollar las

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 83
reglas difusas, las funciones de pertenencia, etc. Una vez introducido el citado comando
aparece una ventana la que se representa en la ilustración 71.
Ilustración 71 FIS EDITOR
En esta figura puede distinguirse, en la parte superior, un recuadro denominado
“input 1”, que corresponde a la variable de entrada al sistema y un recuadro
denominado “output 1” que corresponde a la variable de salida.
Nuestro programa contará con 3 variables de entrada que, como ya se dijo,
serán, las 3 frecuencias, correspondientes a los 3 picos de frecuencia más significativos
entre los 90 y los 300Hz, del espectro de frecuencias de la envolvente. Estas 3 variables
de entrada recibirán los siguientes nombres:
• MAX1
• MAX2
• MAX3
Por otro lado nuestro clasificador tendrá 4 variables de salida correspondientes a
los siguientes grupos.
• Rodamiento en buenas condiciones.
• Rodamiento con defecto en bola.
• Rodamiento con defecto en pista externa.
• Rodamiento con defecto en pista interna.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 84
Para introducir una variable nueva, se depliega el menú “Edit” y da la
posibilidad de seleccionar entre “Add input” o “Add output”, dependiendo de si lo que
necesitamos es una variable de entrada o de salida. En el recuadro “Name” se puede
incluir un nombre a las variables. Debajo de este recuadro el programa muestra el tipo
de variable (si es de entrada o de salida) y el rango admisible de valores que puede
tomar la misma. Este rango puede ser modificado y como hacerlo se explicará
convenientemente en el apartado 4.3.3.
De tal manera que la pantalla FIS EDITOR, para el presente proyecto, tendrá
aspecto de la ilustración 72:
Ilustración 72 FIS EDITOR correspondiente al problema concreto del presente proyecto.
En la parte inferior izquierda de esta ventana aparecen una serie de parámetros
que regula el comportamiento del sistema difuso, tales como: Método de agregación
lógica, método de desdifusión, etc. La elección de estos parámetros se llevará a cabo
mediante la experiencia del usuario.
4.3.3 EDITOR DE FUNCIONES DE PERTENENCIA ( MEMBERSHIP
FUNCTION EDITOR)
Continuando con la programación del clasificador difuso, desplegamos el menú
“View”, seleccionando la opción “Edit membership functions” [12].

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 85
La nueva ventana, que muestra el asistente, tiene el aspecto que presenta la
ilustración 73, teniendo en cuenta que ya ha sido convenientemente modificada para el
desarrollo de este proyecto.
Ilustración 73 MEMBERSHIP FUNCTION EDITOR.
En esta nueva ventana se han introducido las funciones de pertenencia de los
distintos conjuntos difusos. Para cada una de las variables de entrada, se propusieron los
siguientes conjuntos difusos:
• BPFO • 2BSF-2FTF • 10FTF • 2BSF • BPFI • 15FTF • 2BPFO • 18FTF • 2BPFI-BSF • 3BPFO • 2BPFI o 4BSF
Por el contrario, las variables de salida presentan solamente un conjunto por
variable.
En el procedimiento general para añadir funciones de pertenencia, se ha de
seleccionar la variable deseada en la zona superior izquierda. Seguidamente en el menú

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 86
“Edit” se elegirá la opción “Add MFs” donde se podrá seleccionar el tipo de función y
el número de funciones de ese tipo que se desea que aparezcan para esa variable [12].
Una vez creada se debe introducir el rango de valores permitidos para la función en el
recuadro “Range”. Se podrá además nombrar a la función mediante el recuadro
“Name”, así como cambiar su tipo a través del desplegable “type”. Los parámetros son
los que dan la forma deseada a la función y su significado varía según el tipo de función
que empleemos.
4.3.4 CREACIÓN DE FUNCIONES DE PERTENENCIA PARA LAS
VARIABLES DE ENTRADA.
Para la creación de las funciones de pertenencia en las variables de entrada se
partirá de la tabla 17, que contiene las frecuencias naturales de fallo comprendidas entre
90 y 300Hz o lo que es aproximadamente lo ismo entre BPFO y 2BPFI .
Tabla 17 Frecuencias naturales de fallo entre 90 y 300Hz
La forma elegida para las funciones de entrada, de entre las que ofrece el
programa será una “gaussmf”, consistente en una Gaussiana. Esta función depende de
dos parámetros σ y c, desviación típica y media respectivamente, y responde a la
siguiente expresión matemática [12]:
2
2
2)(
),;( σσcx
ecxf−−
= (39)
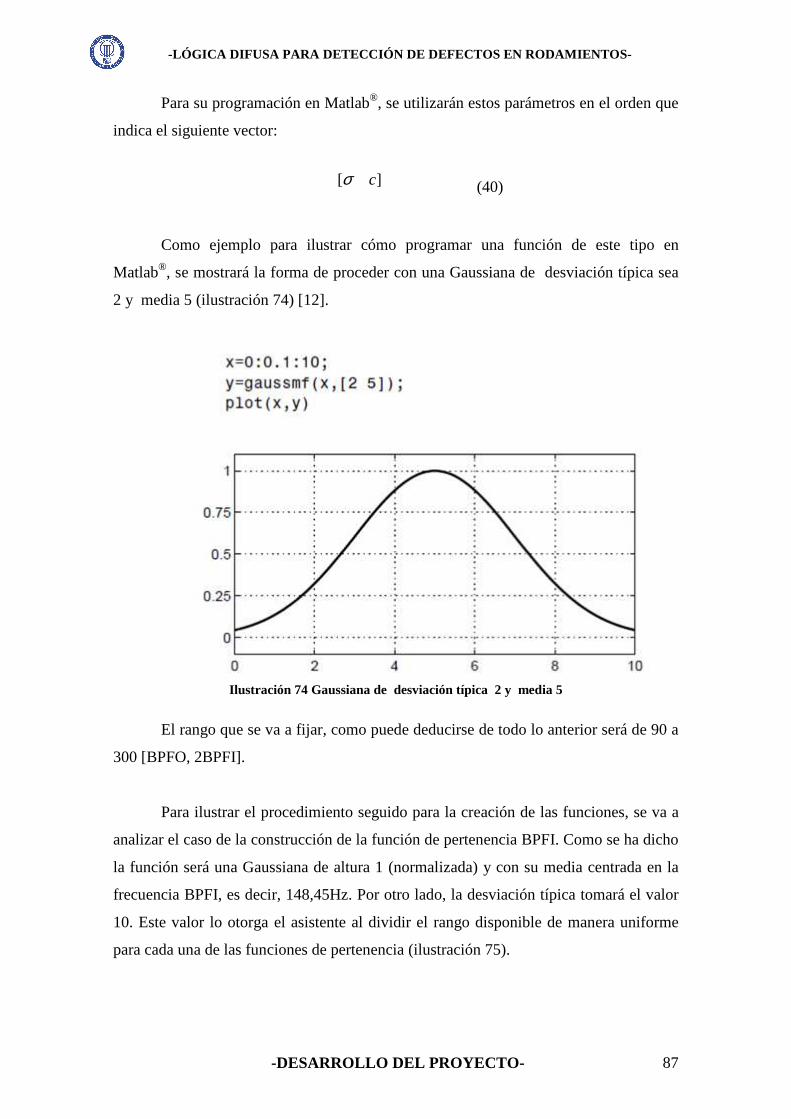
-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 87
Para su programación en Matlab®, se utilizarán estos parámetros en el orden que
indica el siguiente vector:
][ cσ (40)
Como ejemplo para ilustrar cómo programar una función de este tipo en
Matlab®, se mostrará la forma de proceder con una Gaussiana de desviación típica sea
2 y media 5 (ilustración 74) [12].
Ilustración 74 Gaussiana de desviación típica 2 y media 5
El rango que se va a fijar, como puede deducirse de todo lo anterior será de 90 a
300 [BPFO, 2BPFI].
Para ilustrar el procedimiento seguido para la creación de las funciones, se va a
analizar el caso de la construcción de la función de pertenencia BPFI. Como se ha dicho
la función será una Gaussiana de altura 1 (normalizada) y con su media centrada en la
frecuencia BPFI, es decir, 148,45Hz. Por otro lado, la desviación típica tomará el valor
10. Este valor lo otorga el asistente al dividir el rango disponible de manera uniforme
para cada una de las funciones de pertenencia (ilustración 75).

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 88
Ilustración 75 Creando la función de pertenencia BPFI
Este procedimiento se repetirá para cada uno de las frecuencias anteriormente
citadas y para cada una de las variables de entrada. Tendremos por tanto para cada
variable de entrada 11 funciones de pertenencia (ilustración 76).
Ilustración 76 Variable MAX1 con todas sus funciones de pertenencia
4.3.5 CREACIÓN DE FUNCIONES DE PERTENENCIA PARA LAS
VARIABLES DE SALIDA, AGREGACIÓN LÓGICA Y
DESDIFUSIÓN.
Las variables de salida representan cada uno de los defectos estudiados así como
la posibilidad de que el rodamiento se encuentre en buenas condiciones y, a diferencia
de las de entrada, éstas tienen únicamente asociada una función de pertenencia.
Todas las funciones de pertenencia para las variables de salida tienen la misma
forma. Dicha forma se muestra en la ilustración 77.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 89
Ilustración 77 Función de pertenencia para la variable EXTERNA (% de fallo en pista externa)
Como se puede observar en la ilustración 77, el rango de todas las salidas está
comprendido entre 0 y 100. Eso tiene mucho sentido, ya que las variables de salida
expresan la probabilidad en porcentaje, de pertenencia a uno u otro grupo.
Además, se ha elegido esta forma de función, ya que si, por ejemplo, se entra a
la gráfica con un valor 1 en el eje Y, se tendrá un 100% de probabilidad de que el
rodamiento presente defecto en pista externa. Si por el contrario se entra con un valor de
0.5 en eje Y se obtendrá una probabilidad del 50% de presencia de fallo. El tipo de
función escogido en el asistente es una “trimf”. Se trata de una función triangular que
depende de tres parámetros escalares a, b y c. Matemáticamente se puede expresar de la
siguiente manera [12]:
(41)
O de manera más compacta:
−−
−−= 0,,minmax),,;(
bc
xc
ab
axcbaxf (42)
Los escalares a y c indican los “pies” del triángulo y el escalar b indica el pico
del mismo. Como ejemplo, se va a analizar la construcción de una función triangular de
parámetros [ ]863 [12].
≤
≤≤−−
≤≤−−
≤
=
xc
cxbbc
xc
bxaab
axax
cbaxf
0
0
),,;(

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 90
Ilustración 78 Triangular de escalares 3,6 y 8
La agregación es una unión lógica que se define como máximo o suma
algebraica de los conjuntos de salida, obteniéndose así un conjunto de salida único,
asociado a la variable de salida [14]. El método de agregación escogido ha sido el
máximo que en Matlab® se denomina “max”.
Por otro lado, el método de desdifusión escogido ha sido “som”, consistente en
comparar máximos. Tanto el método de agregación, como el de desdifusión, han sido
elegidos mediante la experiencia del usuario, siendo los elegidos, los que mejores
resultados arrojaban.
4.3.6 EDITOR DE REGLAS DIFUSAS (RULE EDITOR).
Una vez definidas todas las funciones de pertenencia, tanto para las variables de
entrada como las de salida, es el momento de construir las reglas difusas que relacionen
unas con otras. En el asistente, se accederá al editor de reglas difusas a través del menú
“View”, en la opción “Edit rules”, que mostrará la ventana que se presenta en la
ilustración 79.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 91
Ilustración 79 RULES EDITOR
En concreto se muestra el editor de reglas difusas correspondiente a nuestro
problema concreto.
Mediante este asistente, la manera de introducir reglas difusas es bastante
intuitiva. Se selecciona la función de pertenencia que se considere oportuna para cada
una de las variables que se desean introducir en la regla. En la parte inferior izquierda,
puede seleccionarse el operador lógico que relacionará las distintas variables dentro de
la regla. Tras las variables de entrada aparecen las variables de salida. Si el programa
tiene numerosas variables (como es el caso del presente problema), no caben todas en la
misma ventana y se utilizan las flechas que aparecen en la parte inferior derecha del
asistente para desplazarnos a izquierda y derecha. El asistente también posibilita la
acción de seleccionar el conjunto complementario para cada función seleccionando la
opción “Not”. El último aspecto de interés dentro de este editor es el peso que se le
otorga a la regla difusa a través del recuadro “Weight” (abajo a la izquierda) [12]. El
peso es la manera que se tiene de indicarle al programa que una regla es más o menos
importante que otra. Esto se consigue otorgando a cada regla un porcentaje numérico. A
mayor porcentaje mayor importancia tendrá la regla. Las reglas una vez introducidas
aparecen en el recuadro superior.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 92
Una vez explicado el funcionamiento del editor de reglas difusas se va a
proceder a analizar la forma en la que se han concebido las reglas difusas para este
problema concreto.
4.3.7 REGLAS DIFUSAS
Como mencionamos se ha decidido introducir las 3 frecuencias
correspondientes a los picos más altos del espectro de frecuencia de envolvente de la
señal, comprendidas en el intervalo [90,300] Hz, ya que este intervalo es el que muestra
un patrón más reconocible para identificar los defectos en rodamientos.
Las reglas más simples consistirán en que una de estas 3 frecuencias coincida
con alguna de las frecuencias naturales de fallo introducidas en el clasificador, de la
siguiente manera:
SI (MAX1 es BPFO) ENTONCES (EXTERNA es EXTERNA) 0.33
Como es lógico pensar una regla tan simple no puede definir la condición del
rodamiento totalmente, por este motivo el peso de este tipo de reglas será del 33%
(0.33).
A medida que se incorporen más variables de entrada a la regla, el peso de la
misma se irá incrementando, para dos variables el peso será del 66% (0.66) y finalmente
para el caso en el que se identifiquen las 3 frecuencias de entrada, se tendrá un peso de
regla del 100% (1). A continuación se muestran 2 ejemplos para ilustrar este
incremento del peso en la regla:
SI (MAX1 es BPFO y MAX2 es 2BPFO) ENTONCES (EXTERNA es EXTERNA) 0.66
SI (MAX1 es BPFO y MAX2 es 2BPFO y MAX es 3BPFO) ENTONCES (EXTERNA es EXTERNA) 1

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 93
Las reglas difusas correspondientes al rodamiento en buenas condiciones, han
visto incrementado su peso ya que este tipo de rodamiento es más difícil de reconocer,
debido a que la FTF es considerablemente la menor de las frecuencias naturales de fallo.
En el anexo 3 de este proyecto, se encuentra un desglose con todas las reglas
difusas programadas.
4.3.8 RESULTADOS OBTENIDOS CON EL CLASIFICADOR DIFUSO.
Una vez definido por completo el clasificador de lógica difusa, se procede a
evaluar las distintas señales de vibración para analizar los resultados obtenidos. Para
ello se han de ejecutar en Matlab® los siguientes comandos:
A = readfis(‘CLASIFICADOR DIFUSO’); evalfis(‘nombre de los datos a analizar’, A);
Esta orden devuelve el análisis de las variables introducidas que serán los
porcentajes de pertenencia a cada uno de los grupos de rodamientos
También se puede evaluar señales a través del asistente para lógica difusa de
Matlab®. Se accede mediante el menú “View”, en la opción “View rules”. Aparece la
ventana que se muestra en la ilustración 80. En ella, mediante el recuadro “Input”, se
puede introducir un vector que contenga las variables de entrada y en la parte superior
derecha devuelve el valor de las variables de salida, que representan los porcentajes de
pertenencia a cada uno de los grupos de rodamientos.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 94
Ilustración 80 RULES VIEWER
Los resultados del análisis de cada señal se muestran en las tablas 18,19, 20 y
21.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 95
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
B-30-50000-1 95.7000 118.4000 236.9000 100 31 25 47
B-30-50000-2 118.4000 118.5000 236.9000 100 2 25 47
B-30-50000-3 95.7000 118.4000 236.9000 100 31 25 47
B-30-50000-4 95.7000 118.4000 118.5000 100 31 1 47
B-30-50000-5 95.7000 118.4000 236.9000 100 31 25 47
B-30-25000-1 95.8000 118.4000 236.8000 100 31 25 47
B-30-25000-2 95.6000 118.4000 236.8000 100 31 25 47
B-30-25000-3 95.8000 118.4000 236.8000 100 31 25 47
B-30-25000-4 95.6000 118.4000 236.8000 100 31 25 47
B-30-25000-5 95.8000 118.4000 236.8000 100 31 25 47
B-30-20000-1 95.5000 118.2500 236.5000 100 31 25 47
B-30-20000-2 118.2500 118.5000 236.7500 100 2 25 47
B-30-20000-3 95.5000 118.2500 236.5000 100 31 25 47
B-30-20000-4 95.5000 118.2500 141.0000 66 31 19 47
B-30-20000-5 95.7500 118.5000 236.7500 100 31 25 47
B-30-15000-1 95.6667 118.3333 236.3333 100 31 25 47
B-30-15000-2 95.6667 118.3333 236.6667 100 31 25 47
B-30-15000-3 95.6667 118.3333 236.6667 100 31 25 47
B-30-15000-4 95.6667 118.3333 236.3333 100 31 25 47
B-30-15000-5 118.0000 118.3333 236.3333 99 2 25 47
B-30-10000-1 95.5000 118.5000 237.0000 100 31 25 47
B-30-10000-2 96.0000 118.5000 237.0000 100 30 25 47
B-30-10000-3 95.5000 118.5000 237.0000 100 31 25 47
B-30-10000-4 95.5000 118.5000 237.0000 100 31 25 47
B-30-10000-5 95.5000 118.5000 237.0000 100 31 25 47
B-30-5000-1 118 119 237 99 2 25 47
B-30-5000-2 96 118 119 99 30 1 47
B-30-5000-3 96 118 119 99 30 1 47
B-30-5000-4 118 119 237 99 2 25 47
B-30-5000-5 96 118 237 99 30 25 47 Tabla 18 Resultados para el rodamiento con fallo en bola (30Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 96
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
O-30-50000-1 90.6000 90.7000 181.3000 28 99 2 32
O-30-50000-2 90.6000 90.7000 181.3000 28 99 2 32
O-30-50000-3 90.6000 90.7000 181.3000 28 99 2 32
O-30-50000-4 90.6000 90.7000 181.3000 28 99 2 32
O-30-50000-5 90.7000 181.4000 272.0000 28 97 3 32
O-30-25000-1 90.6000 181.2000 272.0000 28 97 3 32
O-30-25000-2 90.6000 181.4000 272.0000 28 97 3 32
O-30-25000-3 90.6000 181.4000 272.0000 28 97 3 32
O-30-25000-4 90.6000 181.4000 272.0000 28 97 3 32
O-30-25000-5 90.6000 181.4000 272.0000 28 97 3 32
O-30-20000-1 90.5000 90.7500 181.2500 28 99 2 32
O-30-20000-2 90.7500 181.2500 272.0000 28 97 3 32
O-30-20000-3 90.5000 90.7500 181.2500 28 99 2 32
O-30-20000-4 90.5000 90.7500 181.2500 28 99 2 32
O-30-20000-5 90.5000 90.7500 181.2500 28 99 2 32
O-30-15000-1 90.6667 181.3333 272.0000 28 97 3 32
O-30-15000-2 90.6667 181.3333 272.0000 28 97 3 32
O-30-15000-3 90.6667 181.3333 272.0000 28 97 3 32
O-30-15000-4 90.6667 181.3333 272.0000 28 97 3 32
O-30-15000-5 90.6667 181.3333 272.0000 28 97 3 32
O-30-10000-1 90.5000 181.5000 272.0000 28 97 3 31
O-30-10000-2 90.5000 181.0000 272.0000 28 97 3 33
O-30-10000-3 90.5000 181.5000 272.0000 28 97 3 31
O-30-10000-4 90.5000 181.5000 272.0000 28 97 3 31
O-30-10000-5 90.5000 181.5000 272.0000 28 97 3 31
O-30-5000-1 90 179 269 27 86 2 39
O-30-5000-2 90 91 181 29 98 2 33
O-30-5000-3 91 181 272 29 97 3 33
O-30-5000-4 91 181 272 29 97 3 33
O-30-5000-5 90 91 181 29 98 2 33 Tabla 19 Resultados para el rodamiento con fallo en pista externa (30Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 97
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
I-30-50000-1 147.3000 206.7000 294.5000 1 5 98 50
I-30-50000-2 147.2000 206.7000 294.5000 1 5 98 50
I-30-50000-3 147.3000 206.7000 294.5000 1 5 98 50
I-30-50000-4 147.2000 206.7000 235.0000 33 3 98 50
I-30-50000-5 147.3000 206.7000 294.5000 1 5 98 50
I-30-25000-1 147.2000 206.8000 235.0000 33 2 98 50
I-30-25000-2 147.2000 206.8000 294.6000 1 5 98 50
I-30-25000-3 119.0000 147.2000 235.0000 65 1 98 46
I-30-25000-4 119.0000 147.2000 235.0000 33 2 98 50
I-30-25000-5 147.2000 235.0000 294.4000 33 5 49 3
I-30-20000-1 147.2500 206.7500 294.5000 1 5 98 50
I-30-20000-2 119.0000 147.2500 206.7500 33 3 100 50
I-30-20000-3 147.2500 206.7500 235.0000 33 3 98 50
I-30-20000-4 119.0000 147.2500 206.7500 33 3 100 50
I-30-20000-5 147.2500 206.7500 294.5000 1 5 98 50
I-30-15000-1 147.3333 206.6667 235.0000 33 3 98 50
I-30-15000-2 119.0000 147.3333 206.6667 33 3 100 50
I-30-15000-3 119.0000 147.3333 206.6667 33 3 100 50
I-30-15000-4 147.3333 206.6667 235.0000 33 3 98 50
I-30-15000-5 119.0000 147.3333 206.6667 33 3 100 50
I-30-10000-1 119 147 235 65 1 98 46
I-30-10000-2 119 147 235 65 1 98 46
I-30-10000-3 119 147 235 65 1 98 46
I-30-10000-4 119 147 235 65 1 98 46
I-30-10000-5 119 147 235 65 1 98 46
I-30-5000-1 147 207 235 33 2 98 50
I-30-5000-2 119 147 235 65 1 98 46
I-30-5000-3 119 147 207 33 2 99 50
I-30-5000-4 119 147 207 33 2 99 50
I-30-5000-5 119 147 235 65 1 98 46 Tabla 20 Resultados para el rodamiento con fallo en pista interna (30Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 98
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
A-30-50000-1 176.9000 177.0000 294.5000 1 55 25 70
A-30-50000-2 176.9000 177.0000 294.5000 1 55 25 70
A-30-50000-3 177.0000 235.2000 294.5000 33 28 25 44
A-30-50000-4 176.9000 206.6000 294.5000 1 28 49 70
A-30-50000-5 176.9000 206.6000 294.5000 1 28 49 70
A-30-25000-1 174.6000 177.0000 206.6000 1 46 25 87
A-30-25000-2 177.0000 206.6000 294.4000 1 28 49 70
A-30-25000-3 174.6000 177.0000 206.6000 1 46 25 87
A-30-25000-4 177.0000 206.6000 294.4000 1 28 49 70
A-30-25000-5 177.0000 206.6000 294.6000 1 28 49 70
A-30-20000-1 177.0000 206.5000 294.5000 1 28 49 70
A-30-20000-2 174.7500 177.0000 294.5000 1 47 25 70
A-30-20000-3 176.7500 206.5000 294.5000 1 27 49 71
A-30-20000-4 177.0000 206.5000 294.5000 1 28 49 70
A-30-20000-5 177.0000 206.5000 294.5000 1 28 49 70
A-30-15000-1 174.6667 176.6667 294.3333 1 47 25 71
A-30-15000-2 117.0000 177.0000 294.3333 33 28 25 70
A-30-15000-3 174.6667 177.0000 294.3333 1 47 25 70
A-30-15000-4 176.6667 235.0000 294.3333 33 27 25 45
A-30-15000-5 177.0000 205.3333 294.3333 1 28 49 70
A-30-10000-1 177.0000 206.5000 294.0000 1 28 48 70
A-30-10000-2 177.0000 206.5000 294.0000 1 28 48 70
A-30-10000-3 177.0000 235.0000 263.5000 33 36 25 44
A-30-10000-4 117.5000 176.5000 177.0000 33 54 2 87
A-30-10000-5 90 117 294 54 33 24 49
A-30-5000-1 90 176 177 27 78 2 70
A-30-5000-2 176 177 235 33 52 25 70
A-30-5000-3 90 177 235 54 55 25 44
A-30-5000-4 91 117 177 57 55 1 70
A-30-5000-5 117 177 251 33 28 10 70 Tabla 21 Resultados para el rodamiento con fallo en buenas condiciones (30Hz)
A continuación se procede a estudiar la tasa de acierto de este clasificador,
basado en la lógica difusa, para clasificar cada tipo de rodamiento obteniéndose los
resultados de la tabla 22:

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 99
BOLA EXTERIOR INTERIOR NORMAL
100% 100% 100% 90%
TIPO DE RODAMIENTO
Tabla 22 Tasa de aciertos para el clasificador difuso para rodamientos a velocidad de 30 Hz
Como se puede apreciar se han obtenido unas tasas de acierto bastante elevadas
a la hora de clasificar cada tipo de rodamiento. La menor de todas las tasas de acierto es
para el rodamiento en buenas condiciones con un 90%. Si nos fijamos en la tabla de
resultados correspondiente a ese tipo de rodamiento se puede observar que, lo que
ocurre es que en contadas ocasiones el clasificador confunde un rodamiento normal con
un rodamiento con fallo en bola o en la pista exterior. Por tanto, aunque en este pequeño
porcentaje de las veces no se consiga identificar correctamente un rodamiento en buenas
condiciones, se estará del lado de la seguridad.
4.4 CLASISFICADOR DIFUSO INDEPENDINTE DE LA VELOCIDAD
4.4.1 INTRODUCCIÓN
Como ya se mencionó el clasificador difuso se diseñó utilizando las señales
obtenidas a 30 Hz. Sin embargo, basándonos en la idea de comparar los picos más
significativos del espectro de frecuencias con las expresiones analíticas de las
frecuencias naturales de fallo, podemos mejorar el clasificador de tal forma que pueda
ser utilizado para cualquier velocidad de giro del eje.
Observando las expresiones analíticas de las frecuencias de fallo, se aprecia que
todas son lineales con la frecuencia de giro del eje y que, por tanto, es posible
adimensionalizarlas tal y como se muestra en las ecuaciones (43), (44), (45) y (46).
= −Pd
Bd
RPM
FTF φcos1
2
1
60
1 (43)
+
=Pd
BdNb
RPM
BPFI φcos1
260
1 (44)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 100
−
=Pd
BdNb
RPM
BPFO φcos1
260
1 (45)
−
=
2
22cos1
2601
d
d
d
d
P
B
B
P
RPM
BSF φ (46)
Basándonos en esto, se ha construido un clasificador muy similar al anterior con
las mismas reglas difusas, mismas variables de entrada y de salida, pero modificando las
funciones de pertenencia de las variables de entrada introduciendo en vez de las
frecuencias de fallo propiamente dichas, los parámetros adimensionales que se muestran
en la tabla 23.
Significado Frecuencia Adimensionalizada
BPFO/RPM 3,051657211
(2BSF-2FTF)/RPM 3,217884131
10FTF/RPM 3,814571514
2BSF/RPM 3,980798434
BPFI/RPM 4,948342789
15FTF/RPM 5,721857271
2BPFO/RPM 6,103314422
18FTF/RPM 6,866228725
(2BPFI-BSF)/RPM 7,906286361
3BPFO/RPM 9,154971633
2BPFI/RPM 9,896685578 Tabla 23 Funciones de pertenencia para el clasificador independiente de la velocidad
En la ilustración 81, se puede observar como quedarían las funciones de
pertenecía para cada una de las variables de entrada al clasificador.
Ilustración 81 Funciones de pertenencia para el clasificador independiente de la velocidad

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 101
4.4.2 RESULTADOS OBTENIDOS
Una vez construido este segundo clasificador, se le vuelven a introducir las 3
frecuencias correspondientes a los tres picos más significativos (ahora
adimensionalizadas) del espectro de frecuencias de la envolvente, con dos salvedades:
• Ahora estas tres frecuencias significativas habrá que dividirlas entre la
velocidad de giro del eje para poder introducírselas al clasificador.
• Cuando se trataba con las señales de 30 Hz, se escogían estas tres
frecuencias significativas entre los 90 y los 300 Hz, es decir,
aproximadamente entre BPFO y 2BPFI. Por tanto ahora, cuando el
clasificador se encuentre con señales de 20 y 10 Hz, se escogerán las
variables de entrada de entre los rangos [60 200] y [30 100] Hz
respectivamente.
De este modo los resultados obtenidos se recogen desde la tabla 24 hasta la 35.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 102
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
I-30-50000-1 4.9100 6.8900 9.8167 1 5 98 50
I-30-50000-2 4.9067 6.8900 9.8167 1 5 98 50
I-30-50000-3 4.9100 6.8900 9.8167 1 5 98 50
I-30-50000-4 4.9067 6.8900 7.8333 33 3 98 50
I-30-50000-5 4.9100 6.8900 9.8167 1 5 98 50
I-30-25000-1 4.9067 6.8933 7.8333 33 2 98 50
I-30-25000-2 4.9067 6.8933 9.8200 1 5 98 50
I-30-25000-3 3.9667 4.9067 7.8333 65 1 98 46
I-30-25000-4 4.9067 6.8933 7.8333 33 2 98 50
I-30-25000-5 4.9067 7.8333 9.8133 33 5 49 3
I-30-20000-1 4.9083 6.8917 9.8167 1 5 98 50
I-30-20000-2 3.9667 4.9083 6.8917 33 3 100 50
I-30-20000-3 4.9083 6.8917 7.8333 33 3 98 50
I-30-20000-4 3.9667 4.9083 6.8917 33 3 100 50
I-30-20000-5 4.9083 6.8917 9.8167 1 5 98 50
I-30-15000-1 4.9111 6.8889 7.8333 33 3 98 50
I-30-15000-2 3.9667 4.9111 6.8889 33 3 100 50
I-30-15000-3 3.9667 4.9111 6.8889 33 3 100 50
I-30-15000-4 4.9111 6.8889 7.8333 33 3 98 50
I-30-15000-5 3.9667 4.9111 6.8889 33 3 100 50
I-30-10000-1 3.9667 4.9000 7.8333 65 1 98 46
I-30-10000-2 3.9667 4.9000 7.8333 65 1 98 46
I-30-10000-3 3.9667 4.9000 7.8333 65 1 98 46
I-30-10000-4 3.9667 4.9000 7.8333 65 1 98 46
I-30-10000-5 3.9667 4.9000 7.8333 65 1 98 46
I-30-5000-1 4.9000 6.9000 7.8333 33 2 98 50
I-30-5000-2 3.9667 4.9000 7.8333 65 1 98 46
I-30-5000-3 3.9667 4.9000 6.9000 33 2 99 50
I-30-5000-4 3.9667 4.9000 6.9000 33 2 99 50
I-30-5000-5 3.9667 4.9000 7.8333 65 1 98 46 Tabla 24 Resultados para el rodamiento con fallo en pista interna (30Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 103
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
B-30-50000-1 3.1900 3.9467 7.8967 100 31 25 47
B-30-50000-2 3.9467 3.9500 7.8967 100 2 25 47
B-30-50000-3 3.1900 3.9467 7.8967 100 31 25 47
B-30-50000-4 3.1900 3.9467 3.9500 100 31 1 47
B-30-50000-5 3.1900 3.9467 7.8967 100 31 25 47
B-30-25000-1 3.1933 3.9467 7.8933 100 31 25 47
B-30-25000-2 3.1867 3.9467 7.8933 100 31 25 47
B-30-25000-3 3.1933 3.9467 7.8933 100 31 25 47
B-30-25000-4 3.1867 3.9467 7.8933 100 31 25 47
B-30-25000-5 3.1933 3.9467 7.8933 100 31 25 47
B-30-20000-1 3.1833 3.9417 7.8833 100 31 25 47
B-30-20000-2 3.1833 3.9417 7.8833 100 2 25 47
B-30-20000-3 3.1833 3.9417 7.8833 100 31 25 47
B-30-20000-4 3.1833 3.9417 4.7000 66 31 19 47
B-30-20000-5 3.1917 3.9500 7.8917 100 31 25 47
B-30-15000-1 3.1889 3.9444 7.8778 100 31 25 47
B-30-15000-2 3.1889 3.9444 7.8889 100 31 25 47
B-30-15000-3 3.1889 3.9444 7.8889 100 31 25 47
B-30-15000-4 3.1889 3.9444 7.8778 100 31 25 47
B-30-15000-5 3.9333 3.9444 7.8778 99 2 25 47
B-30-10000-1 3.1833 3.9500 7.9000 100 31 25 47
B-30-10000-2 3.2000 3.9500 7.9000 100 30 25 47
B-30-10000-3 3.1833 3.9500 7.9000 100 31 25 47
B-30-10000-4 3.1833 3.9500 7.9000 100 31 25 47
B-30-10000-5 3.1833 3.9500 7.9000 100 31 25 47
B-30-5000-1 3.9333 3.9667 7.9000 99 2 25 47
B-30-5000-2 3.2000 3.9333 3.9667 99 30 1 47
B-30-5000-3 3.2000 3.9333 3.9667 99 30 1 47
B-30-5000-4 3.9333 3.9667 7.9000 99 2 25 47
B-30-5000-5 3.2000 3.9333 7.9000 99 30 25 47 Tabla 25 Resultados para el rodamiento con fallo en bola (30Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 104
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
O-30-50000-1 3.0200 3.0233 6.0433 28 99 2 32
O-30-50000-2 3.0200 3.0233 6.0433 28 99 2 32
O-30-50000-3 3.0200 3.0233 6.0433 28 99 2 32
O-30-50000-4 3.0200 3.0233 6.0433 28 99 2 32
O-30-50000-5 3.0233 6.0467 9.0667 28 97 3 32
O-30-25000-1 3.0200 6.0400 9.0667 28 97 3 32
O-30-25000-2 3.0200 6.0467 9.0667 28 97 3 32
O-30-25000-3 3.0200 6.0467 9.0667 28 97 3 32
O-30-25000-4 3.0200 6.0467 9.0667 28 97 3 32
O-30-25000-5 3.0200 6.0467 9.0667 28 97 3 32
O-30-20000-1 3.0167 3.0250 6.0417 28 99 2 32
O-30-20000-2 3.0250 6.0417 9.0667 28 97 3 32
O-30-20000-3 3.0167 3.0250 6.0417 28 99 2 32
O-30-20000-4 3.0167 3.0250 6.0417 28 99 2 32
O-30-20000-5 3.0167 3.0250 6.0417 28 99 2 32
O-30-15000-1 3.0222 6.0444 9.0667 28 97 3 32
O-30-15000-2 3.0222 6.0444 9.0667 28 97 3 32
O-30-15000-3 3.0222 6.0444 9.0667 28 97 3 32
O-30-15000-4 3.0222 6.0444 9.0667 28 97 3 32
O-30-15000-5 3.0222 6.0444 9.0667 28 97 3 32
O-30-10000-1 3.0167 6.0500 9.0667 28 97 3 31
O-30-10000-2 3.0167 6.0333 9.0667 28 97 3 33
O-30-10000-3 3.0167 6.0500 9.0667 28 97 3 31
O-30-10000-4 3.0167 6.0500 9.0667 28 97 3 31
O-30-10000-5 3.0167 6.0500 9.0667 28 97 3 31
O-30-5000-1 3.0000 5.9667 8.9667 27 86 2 39
O-30-5000-2 3.0000 3.0333 6.0333 29 98 2 33
O-30-5000-3 3.0333 6.0333 9.0667 29 97 3 33
O-30-5000-4 3.0333 6.0333 9.0667 29 97 3 33
O-30-5000-5 3.0000 3.0333 6.0333 29 98 2 33 Tabla 26 Resultados para el rodamiento con fallo en pista externa (30Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 105
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
A-30-50000-1 5.8967 5.9000 9.8167 1 55 25 70
A-30-50000-2 5.8967 5.9000 9.8167 1 55 25 70
A-30-50000-3 5.9000 7.8400 9.8167 33 28 25 44
A-30-50000-4 5.8967 6.8867 9.8167 1 28 49 70
A-30-50000-5 5.8967 6.8867 9.8167 1 28 49 70
A-30-25000-1 5.9000 6.8867 9.8133 1 46 25 87
A-30-25000-2 5.8200 5.9000 6.8867 1 28 49 70
A-30-25000-3 5.8200 5.9000 6.8867 1 46 25 87
A-30-25000-4 5.9000 6.8867 9.8133 1 28 49 70
A-30-25000-5 5.9000 6.8867 9.8200 1 28 49 70
A-30-20000-1 5.9000 6.8833 9.8167 1 28 49 70
A-30-20000-2 5.8250 5.9000 9.8167 1 47 25 70
A-30-20000-3 5.8917 6.8833 9.8167 1 27 49 71
A-30-20000-4 5.9000 6.8833 9.8167 1 28 49 70
A-30-20000-5 5.9000 6.8833 9.8167 1 28 49 70
A-30-15000-1 5.8222 5.8889 9.8111 1 47 25 71
A-30-15000-2 3.9000 5.9000 9.8111 33 28 25 70
A-30-15000-3 5.8222 5.9000 9.8111 1 47 25 70
A-30-15000-4 5.8889 7.8333 9.8111 33 27 25 45
A-30-15000-5 5.9000 6.8444 9.8111 1 28 49 70
A-30-10000-1 5.9000 6.8833 9.8000 1 28 48 70
A-30-10000-2 5.9000 6.8833 9.8000 1 28 48 70
A-30-10000-3 5.9000 7.8333 8.7833 33 36 25 44
A-30-10000-4 3.9167 5.8833 5.9000 33 54 2 87
A-30-10000-5 3.0000 3.9000 9.8000 54 33 24 49
A-30-5000-1 3.0000 5.8667 5.9000 27 78 2 70
A-30-5000-2 5.8667 5.9000 7.8333 33 52 25 70
A-30-5000-3 3.0000 5.9000 7.8333 54 55 25 44
A-30-5000-4 3.0333 3.9000 5.9000 57 55 1 70
A-30-5000-5 3.9000 5.9000 8.3667 33 28 10 70 Tabla 27 Resultado para el rodamiento en buenas condiciones (30Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 106
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
I-20-50000-1 4.8850 4.8900 6.8600 2 3 99 50
I-20-50000-2 3.9500 4.8850 4.8900 33 1 50 47
I-20-50000-3 3.9500 4.8850 4.8900 33 1 50 47
I-20-50000-4 3.9500 4.8850 4.8900 33 1 50 47
I-20-50000-5 3.9500 4.8850 4.8900 33 1 50 47
I-20-25000-1 3.9500 4.8900 6.8600 33 3 99 50
I-20-25000-2 3.9500 4.8900 6.8600 33 3 99 50
I-20-25000-3 3.9500 4.8900 6.8600 33 3 99 50
I-20-25000-4 3.9500 4.8900 6.8600 33 3 99 50
I-20-25000-5 3.9500 4.8900 6.8600 33 3 99 50
I-20-20000-1 3.9500 4.8875 6.8625 33 3 99 50
I-20-20000-2 3.9500 4.8875 6.8625 33 3 99 50
I-20-20000-3 3.9500 4.8875 6.8625 33 3 99 50
I-20-20000-4 3.9500 4.8875 6.8625 33 3 99 50
I-20-20000-5 3 3 3 27 66 1 3
I-20-15000-1 3.9500 4.8833 6.8667 33 3 99 50
I-20-15000-2 3.9500 4.8833 7.8000 63 1 96 47
I-20-15000-3 3.9500 4.8833 6.8667 33 3 99 50
I-20-15000-4 3.9500 4.8833 6.8667 33 3 99 50
I-20-15000-5 3.9500 4.8833 6.8667 33 3 99 50
I-20-10000-1 3.9500 4.8750 4.9000 33 1 49 47
I-20-10000-2 3.9500 4.8750 4.9000 33 1 49 47
I-20-10000-3 3.9500 4.8750 4.9000 33 1 49 47
I-20-10000-4 3.9500 4.8750 6.8500 33 3 98 50
I-20-10000-5 3.9500 4.8750 4.9000 33 1 49 47
I-20-5000-1 3.9500 4.9000 6.8500 33 3 99 50
I-20-5000-2 3.9500 4.9000 6.8500 33 3 99 50
I-20-5000-3 3.9500 4.9000 6.8500 33 3 99 50
I-20-5000-4 3.9500 4.9000 6.8500 33 3 99 50
I-20-5000-5 3.9500 4.9000 6.8500 33 3 99 50 Tabla 28 Resultados para el rodamiento con fallo en pista interna (20Hz)
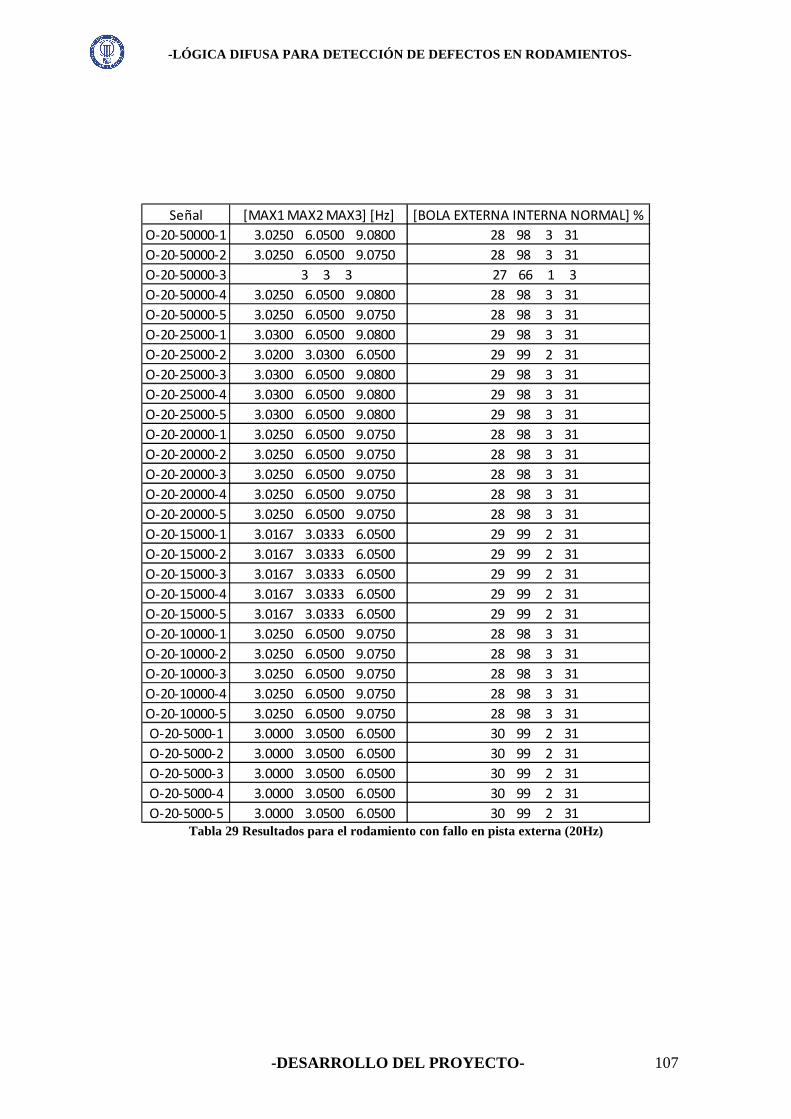
-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 107
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
O-20-50000-1 3.0250 6.0500 9.0800 28 98 3 31
O-20-50000-2 3.0250 6.0500 9.0750 28 98 3 31
O-20-50000-3 3 3 3 27 66 1 3
O-20-50000-4 3.0250 6.0500 9.0800 28 98 3 31
O-20-50000-5 3.0250 6.0500 9.0750 28 98 3 31
O-20-25000-1 3.0300 6.0500 9.0800 29 98 3 31
O-20-25000-2 3.0200 3.0300 6.0500 29 99 2 31
O-20-25000-3 3.0300 6.0500 9.0800 29 98 3 31
O-20-25000-4 3.0300 6.0500 9.0800 29 98 3 31
O-20-25000-5 3.0300 6.0500 9.0800 29 98 3 31
O-20-20000-1 3.0250 6.0500 9.0750 28 98 3 31
O-20-20000-2 3.0250 6.0500 9.0750 28 98 3 31
O-20-20000-3 3.0250 6.0500 9.0750 28 98 3 31
O-20-20000-4 3.0250 6.0500 9.0750 28 98 3 31
O-20-20000-5 3.0250 6.0500 9.0750 28 98 3 31
O-20-15000-1 3.0167 3.0333 6.0500 29 99 2 31
O-20-15000-2 3.0167 3.0333 6.0500 29 99 2 31
O-20-15000-3 3.0167 3.0333 6.0500 29 99 2 31
O-20-15000-4 3.0167 3.0333 6.0500 29 99 2 31
O-20-15000-5 3.0167 3.0333 6.0500 29 99 2 31
O-20-10000-1 3.0250 6.0500 9.0750 28 98 3 31
O-20-10000-2 3.0250 6.0500 9.0750 28 98 3 31
O-20-10000-3 3.0250 6.0500 9.0750 28 98 3 31
O-20-10000-4 3.0250 6.0500 9.0750 28 98 3 31
O-20-10000-5 3.0250 6.0500 9.0750 28 98 3 31
O-20-5000-1 3.0000 3.0500 6.0500 30 99 2 31
O-20-5000-2 3.0000 3.0500 6.0500 30 99 2 31
O-20-5000-3 3.0000 3.0500 6.0500 30 99 2 31
O-20-5000-4 3.0000 3.0500 6.0500 30 99 2 31
O-20-5000-5 3.0000 3.0500 6.0500 30 99 2 31 Tabla 29 Resultados para el rodamiento con fallo en pista externa (20Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 108
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
B-20-50000-1 3.1450 3.8950 3.9000 97 32 1 49
B-20-50000-2 3.1450 3.9000 4.6550 65 32 17 49
B-20-50000-3 3.9000 3.9050 4.6550 65 3 17 49
B-20-50000-4 3.1450 3.9000 4.6550 65 32 17 49
B-20-50000-5 3.1450 3.8950 3.9000 97 32 1 49
B-20-25000-1 3.1400 3.8900 7.7800 94 32 24 49
B-20-25000-2 3.1400 3.8900 4.6500 64 32 17 49
B-20-25000-3 3.1400 3.8900 4.6500 64 32 17 49
B-20-25000-4 3.1400 3.8900 4.6500 64 32 17 49
B-20-25000-5 3.1400 3.8900 7.7800 94 32 24 49
B-20-20000-1 3.1375 3.8875 7.7750 93 32 24 49
B-20-20000-2 3.1375 3.8875 4.6375 64 32 17 49
B-20-20000-3 3.1250 3.8875 4.6375 64 33 17 49
B-20-20000-4 3.1250 3.8750 4.6375 63 33 17 50
B-20-20000-5 3.1250 3.8750 4.6250 63 33 16 50
B-20-15000-1 3.1500 3.9000 7.8167 97 32 25 49
B-20-15000-2 3.1500 3.9000 7.8000 96 32 24 49
B-20-15000-3 3.1500 3.9000 3.9167 98 32 1 49
B-20-15000-4 3.1500 3.9000 4.6667 65 32 18 49
B-20-15000-5 3.1500 3.9000 3.9167 98 32 1 49
B-20-10000-1 3.1500 3.9000 4.6500 65 32 17 49
B-20-10000-2 3.1500 3.9000 4.6500 65 32 17 49
B-20-10000-3 3.1500 3.9000 4.6500 65 32 17 49
B-20-10000-4 3.1500 3.9000 7.8000 96 32 24 49
B-20-10000-5 3.1500 3.9000 4.6500 65 32 17 49
B-20-5000-1 3.1500 3.9000 4.6500 65 32 17 49
B-20-5000-2 3.1500 3.9000 4.6500 65 32 17 49
B-20-5000-3 3.1500 3.9000 4.6500 65 32 17 49
B-20-5000-4 3.1500 3.9000 4.6500 65 32 17 49
B-20-5000-5 3.1500 3.9000 4.6500 65 32 17 49 Tabla 30 Resultados para el rodamiento con fallo en bolas (20Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 109
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
A-20-50000-1 4.9050 5.8250 5.8500 1 47 25 75
A-20-50000-2 4.9050 5.8250 8.8550 2 45 25 48
A-20-50000-3 4.9050 5.8250 8.8550 2 45 25 48
A-20-50000-4 3.0000 4.9050 5.8250 27 47 25 48
A-20-50000-5 4.9050 5.8250 8.8550 2 45 25 48
A-20-25000-1 4.9000 5.8500 8.8300 2 42 25 47
A-20-25000-2 5.8500 8.8300 8.8600 1 45 2 47
A-20-25000-3 5.8200 5.8500 8.8300 1 47 2 75
A-20-25000-4 4.9000 8.8300 8.8600 2 23 25 3
A-20-25000-5 4.9000 5.8200 5.8500 1 47 25 75
A-20-20000-1 4.9000 5.8500 8.8300 2 42 25 47
A-20-20000-2 4.9000 7.8750 8.8600 33 23 50 3
A-20-20000-3 3.0000 4.9000 5.8250 27 47 25 48
A-20-20000-4 3.8875 5.8500 8.8250 32 41 3 75
A-20-20000-5 4.9000 5.8250 9.7600 1 24 46 48
A-20-15000-1 4.9000 5.8500 8.8333 2 42 25 47
A-20-15000-2 3.0000 3.8833 4.9000 54 33 25 49
A-20-15000-3 3.9000 4.9000 5.8167 33 23 25 77
A-20-15000-4 4.9000 5.8500 7.8333 33 25 49 47
A-20-15000-5 3.8833 4.9000 6.7500 32 6 95 49
A-20-10000-1 4.9000 5.8250 7.8500 33 24 50 48
A-20-10000-2 3.0000 4.9000 5.8250 27 47 25 48
A-20-10000-3 4.9000 5.8250 6.8000 1 24 50 77
A-20-10000-4 4.9000 5.8500 7.8750 33 25 50 47
A-20-10000-5 3.0000 5.8250 7.8500 54 47 25 48
A-20-5000-1 3.0000 3.2000 3.9000 65 60 1 49
A-20-5000-2 5.8500 6.8000 7.8500 33 25 50 75
A-20-5000-3 5.8000 8.8500 9.7500 1 44 23 49
A-20-5000-4 3.0000 3.0500 4.9000 30 66 25 4
A-20-5000-5 3.0000 4.9000 8.8500 27 44 25 4 Tabla 31 Resultados para el rodamiento en buenas condiciones (20Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 110
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
I-10-50000-1 4.8800 7.7900 9.7600 32 7 48 3
I-10-50000-2 3.9400 4.8800 9.7700 33 6 47 47
I-10-50000-3 4.8800 4.8900 9.7700 2 6 49 4
I-10-50000-4 4.8900 6.8600 9.7700 1 6 93 50
I-10-50000-5 4.8900 6.8600 9.7700 1 6 93 50
I-10-25000-1 3.9400 4.8800 7.7800 62 1 94 47
I-10-25000-2 3.9400 4.8800 9.7600 33 7 46 47
I-10-25000-3 3.9400 4.8800 7.7800 62 1 94 47
I-10-25000-4 3.9400 4.8800 9.7600 33 7 46 47
I-10-25000-5 3.9400 4.8800 6.8600 33 3 98 50
I-10-20000-1 3.9250 4.8500 9.7250 33 8 44 48
I-10-20000-2 3.9250 4.8500 6.8250 33 4 96 50
I-10-20000-3 3.9250 4.8500 9.7250 33 8 44 48
I-10-20000-4 4.8750 7.7750 9.7500 31 7 47 2
I-10-20000-5 3.9250 4.8500 9.7250 33 8 44 48
I-10-15000-1 3.9333 4.8667 9.7000 33 9 42 47
I-10-15000-2 3.9333 4.8667 6.8333 33 3 98 50
I-10-15000-3 3.9333 4.8667 9.7000 33 9 42 47
I-10-15000-4 3.9333 4.8667 9.7000 33 9 42 47
I-10-15000-5 3.9333 4.8667 6.8333 33 3 98 50
I-10-10000-1 4.8500 7.7500 9.7000 30 9 45 3
I-10-10000-2 4.8500 6.8000 9.7000 2 9 84 50
I-10-10000-3 3.9000 4.8500 9.7000 33 9 42 49
I-10-10000-4 4.8500 6.8000 9.7000 2 9 84 50
I-10-10000-5 4.8500 6.8000 9.7000 2 9 84 50
I-10-5000-1 4.9000 6.8000 9.7000 1 9 84 50
I-10-5000-2 4.9000 6.8000 9.7000 1 9 84 50
I-10-5000-3 3.9000 4.8000 6.8000 33 4 91 50
I-10-5000-4 3.0000 3.9000 4.8000 54 33 23 49
I-10-5000-5 4.8000 4.9000 9.7000 2 9 46 3 Tabla 32 Resultados para el rodamiento con fallo en pista interna (10 Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 111
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
O-10-50000-1 3.0300 6.0500 6.0600 29 99 2 48
O-10-50000-2 3.0300 6.0600 9.0800 29 98 3 30
O-10-50000-3 3.0300 6.0500 9.0800 29 98 3 31
O-10-50000-4 3.0300 6.0500 9.0800 29 98 3 31
O-10-50000-5 3.0300 6.0600 9.0900 29 99 3 30
O-10-25000-1 3.0200 6.0400 8.0800 56 65 22 32
O-10-25000-2 3.4200 6.0400 9.0600 28 64 3 40
O-10-25000-3 3.0200 6.0400 9.0600 28 97 3 32
O-10-25000-4 3.0200 6.0400 9.0600 28 97 3 32
O-10-25000-5 3.0200 3.0600 6.0400 30 99 2 32
O-10-20000-1 3.0250 6.0500 9.0750 28 98 3 31
O-10-20000-2 3.0250 6.0500 9.0750 28 98 3 31
O-10-20000-3 3.0250 6.0500 9.0750 28 98 3 31
O-10-20000-4 3.0250 6.0500 9.0750 28 98 3 31
O-10-20000-5 3.0250 6.0500 9.0750 28 98 3 31
O-10-15000-1 3 3 3 27 66 1 3
O-10-15000-2 3.0333 6.0333 9.0667 29 97 3 33
O-10-15000-3 3.0333 6.0333 9.0667 29 97 3 33
O-10-15000-4 3.0333 6.0333 9.0667 29 97 3 33
O-10-15000-5 6.0333 6.1000 9.0667 1 65 3 43
O-10-10000-1 3.0000 3.0500 6.0500 30 99 2 31
O-10-10000-2 3.0000 3.0500 6.0500 30 99 2 31
O-10-10000-3 3.0000 6.0500 9.1000 27 99 3 31
O-10-10000-4 3.0500 5.0500 6.0500 30 66 24 31
O-10-10000-5 3.0000 3.0500 6.0500 30 99 2 31
O-10-5000-1 3.0000 6.0000 6.1000 27 96 2 43
O-10-5000-2 5.0000 6.1000 8.8000 1 38 25 27
O-10-5000-3 6.0000 6.1000 9.1000 1 66 3 43
O-10-5000-4 5.0000 6.0000 9.1000 1 63 25 36
O-10-5000-5 4.8000 4.9000 5.8000 2 22 46 49 Tabla 33 Resultados para el rodamiento con fallo en la pista externa (10Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 112
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
B-10-50000-1 3.6400 4.0100 4.3900 45 7 7 44
B-10-50000-2 3.6100 3.6300 3.6700 51 15 1 46
B-10-50000-3 3.2000 5.0900 7.6600 51 30 39 14
B-10-50000-4 3.6300 4.3800 7.6400 49 8 24 43
B-10-50000-5 3.6500 4.0200 7.7100 62 7 22 45
B-10-25000-1 3.5800 3.6800 3.7000 56 12 1 48
B-10-25000-2 3.6000 3.9800 4.2000 54 9 3 45
B-10-25000-3 3.5800 3.6200 4.3800 49 16 6 43
B-10-25000-4 3.4800 3.5600 4.3000 46 21 4 38
B-10-25000-5 3.5000 4.2200 4.2600 70 14 5 32
B-10-20000-1 3.6750 3.7250 4.1000 50 9 1 49
B-10-20000-2 3.6750 3.7000 4.4500 44 10 9 48
B-10-20000-3 3.6750 4.4250 7.7750 44 6 30 46
B-10-20000-4 3.0000 3.7000 8.4500 47 33 7 48
B-10-20000-5 3.6250 3.6750 3.7000 48 12 1 48
B-10-15000-1 3.6667 4.0333 7.7333 65 7 22 46
B-10-15000-2 3.6667 4.1000 7.7000 65 7 21 46
B-10-15000-3 3.6333 3.6667 4.3000 47 13 4 46
B-10-15000-4 3.6000 3.6667 3.7000 52 13 1 48
B-10-15000-5 3.6667 4.0333 7.7667 65 7 23 46
B-10-10000-1 3.6500 4.0000 4.0500 65 7 1 45
B-10-10000-2 3.0500 3.2000 3.3000 33 60 1 16
B-10-10000-3 3.6500 4.0500 7.7000 62 7 21 45
B-10-10000-4 3.3000 4.0500 7.8000 96 26 24 39
B-10-10000-5 3.6500 4.4000 7.8000 46 7 26 45
B-10-5000-1 3.0000 4.0000 4.4000 54 33 7 43
B-10-5000-2 3.0000 4.1000 7.7000 81 33 21 35
B-10-5000-3 3.0000 4.0000 7.6000 66 33 17 43
B-10-5000-4 3.0000 3.7000 7.3000 47 33 11 48
B-10-5000-5 3.1000 4.3000 8.0000 64 33 25 18 Tabla 34 Resultados para el rodamiento con fallo en bola (10Hz)

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 113
Señal [MAX1 MAX2 MAX3] [Hz] [BOLA EXTERNA INTERNA NORMAL] %
A-10-50000-1 3.0600 5.4600 6.0500 30 66 8 50
A-10-50000-2 3.0600 5.4600 6.0500 30 66 8 50
A-10-50000-3 3.0600 5.4600 6.0500 30 66 8 50
A-10-50000-4 3.0600 6.0400 6.0500 30 99 2 50
A-10-50000-5 3.0600 6.0400 6.0500 30 99 2 50
A-10-25000-1 3.0600 5.4600 6.0400 30 65 8 51
A-10-25000-2 3.0600 5.4600 6.0400 30 65 8 51
A-10-25000-3 3.0600 5.4600 6.0400 30 65 8 51
A-10-25000-4 3 3 3 27 66 1 3
A-10-25000-5 3.0600 6.0400 6.0800 30 99 2 45
A-10-20000-1 3.0500 6.0500 8.3000 33 66 13 31
A-10-20000-2 3.0500 6.0500 7.8500 59 66 25 31
A-10-20000-3 3.0750 6.0500 8.3000 33 66 13 31
A-10-20000-4 3.0000 3.0500 6.0500 30 99 2 31
A-10-20000-5 3.0000 3.0500 6.0500 30 99 2 31
A-10-15000-1 3.0667 6.0333 6.0667 30 98 2 47
A-10-15000-2 3.0667 6.0333 6.0667 30 98 2 47
A-10-15000-3 3.0000 3.0667 6.0333 30 98 2 33
A-10-15000-4 3.0000 3.2667 6.0333 33 82 2 33
A-10-15000-5 5.4667 6.0333 6.0667 1 65 8 52
A-10-10000-1 3.0000 3.0500 6.0500 30 99 2 31
A-10-10000-2 3.0500 6.0000 6.0500 30 96 2 50
A-10-10000-3 3.0000 3.0500 6.0500 30 99 2 31
A-10-10000-4 3.0000 3.0500 6.0500 30 99 2 31
A-10-10000-5 3.0000 3.0500 6.0500 30 99 2 31
A-10-5000-1 3.0000 6.0000 6.1000 27 96 2 43
A-10-5000-2 3.0000 4.3000 6.0000 42 63 4 36
A-10-5000-3 3.0000 5.2000 5.9000 27 55 19 44
A-10-5000-4 3.0000 6.0000 6.1000 27 96 2 43
A-10-5000-5 3.0000 6.0000 6.1000 27 96 2 43 Tabla 35 Resultado para el rodamiento en buenas condiciones (10Hz)
A la vista de los resultados obtenidos, las tasas de acierto para la identificación
de cada tipo de rodamiento y para cada velocidad han sido las que se presentan en las
tablas 36, 37 y 38:

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 114
BOLA EXTERIOR INTERIOR NORMAL
100% 100% 100% 90%
TIPO DE RODAMIENTO
Tabla 36 Tasas de acierto para el rodamiento a 30 Hz
BOLA EXTERIOR INTERIOR NORMAL
100% 100% 97% 63%
TIPO DE RODAMIENTO
Tabla 37 Tasas de acierto para el rodamiento a 20 Hz
BOLA EXTERIOR INTERIOR NORMAL
83% 97% 67% 0%
TIPO DE RODAMIENTO
Tabla 38 Tasas de acierto para el rodamiento a 10 Hz
Como se puede apreciar las tasas de acierto van decreciendo a medida que
disminuye la velocidad del eje. Esto era previsible ya que, durante el procesamiento de
la señal, se vio como a medida que aumentaba la frecuencia del eje se percibían mejor
los fallos en los rodamientos. No obstante las tasas de acierto son bastante elevadas para
todos los casos, salvo para la identificación de rodamientos en buenas condiciones a
velocidad de 10Hz. A pesar de este mal resultado, al estar clasificando rodamientos en
buenas condiciones como defectuosos, nos encontramos del lado de la seguridad.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 115
4.5 DESARROLLO DE UN INTERFAZ GRÁFICO PARA LA DETECCIÓN
DE DEFECTOS EN RODAMIENTOS
4.5.1 INTRODUCCIÓN
Como colofón a este proyecto se ha decidido diseñar una aplicación con un
entorno gráfico, para que cualquier operario que trabaje en una fábrica en labores de
mantenimiento, sin necesidad de más conocimientos, pueda determinar si un
rodamiento presenta defecto y donde lo hace. Por tanto dentro de este apartado, se
realizará un interfaz gráfico de usuario, al que nos referiremos como GUI que es como
se normalmente se conocen este tipo de interfaces.
4.5.2 DISEÑO DE UNA GUI
Antes de empezar a programar es imprescindible hablar con el usuario final de la
GUI. Es importantísimo entender cuáles son las necesidades exactas que tiene que
cubrir la aplicación. Para ello es necesario entender el tipo de datos y variables que son
introducidas por el usuario, así como las excepciones que puedan producirse. También
es necesario saber cómo quiere el cliente que se presenten los datos.
La parte del diseño es, con mucha diferencia, la más importante desde el punto
de vista del usuario y por tanto también lo es desde el punto de vista empresarial. Para
diseñar correctamente una GUI, lo mejor es hacer un borrador con papel y lápiz.
Presentar un boceto al cliente y mejorarlo con él es la mejor opción. De esta manera se
consigue que no haya sorpresas y se evita el encarecimiento económico y temporal de
los proyectos. Además se consigue que el cliente se implique en el proyecto poniendo
su talento y sus preferencias en la herramienta que al final usará él mismo.
Una vez que se tiene claro qué objetos tendrá la GUI, es necesario hacer un
programa de tipo “script” que tenga la misma funcionalidad que la GUI que se quiere
programar. Antes de incorporar el programa a la GUI, es necesario hacer todo tipo de
pruebas con él hasta que se esté completamente seguro de que el programa que se va a
incorporar en la GUI es el programa apropiado. Una vez que se tenga el “script”
guardado se pueden incorporar las distintas trozos del script en la GUI, de modo que al

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 116
hacer las pruebas sobre la GUI se puedan contrastar los resultados con los que se
obtuvieron del script.
Para crear una GUI sencilla primero se ha de llamar a la ventana de comandos
de Matlab®. Una vez en ella se seleciona “File →New→GUI”, tal y como se muestra en
la ilustración 82 [17]:
Ilustración 82 Creación de una nueva GUI
La ventana que aparece tiene el aspecto de la ilustración 83. Lo primero que se
debe hacer es guardar la GUI en blanco creada, en nuestro caso, la GUI se ha bautizado
con el nombre de “figura1”.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 117
Ilustración 83 GUI en blanco
Una cuestión muy importante es, que al guardar la interfaz en el mismo
comienzo, aparecen unos archivos nuevos en el directorio elegido. Un archivo será
“figura1.fig” y el otro será “figura1.m” (ilustración 84). Antes de comenzar a
manipularlos es conveniente observarlos, para ver las diferencias que se van a ir
produciendo a medida que se vayan introduciendo elementos dentro de la interfaz.
Ilustración 84 Fichero figura1.m

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 118
Lo que se ve en la ilustración 84, es el archivo de tipo “function” con la
extensión característica de Matlab® “.m”. Este archivo es construido automáticamente
por Matlab® y las líneas de código que aparecen son las que crean la interfaz que
aparece en el archivo figura1.fig.
Ahora, se va a seleccionar el botón “text” sobre la ventana para manipular el
lienzo de la GUI que se está creando. Al hacerlo, el ratón permite seleccionar un área
sobre la que se colocará el texto que se desea que aparezca sobre el lienzo de la GUI, tal
y como se muestra en la ilustración 85 [17]:
Ilustración 85 Creación de un cuadro de texto estático
Una vez ubicado el espacio de texto en el lugar deseado, se puede hacer “clic”
sobre el objeto de texto y se desplegará una ventana desde la que se pueden cambiar las
propiedades del espacio de texto creado, tal y como se puede observar en la ilustración
86:

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 119
Ilustración 86 Ventana de Propety Inspector
A través de esta ventana pueden modificarse todos los parámetros referentes al
espacio de texto creado, tales como color del fondo del campo, la fuente elegida para el
texto, el string o cadena de caracteres, etc.
En esta ventana aparece un aspecto muy importante del cuadro de texto
insertado. Ésta es el “tag” , que consiste en el nombre de la variable que Matlab® le
asigna a este cuadro. Este nombre puede ser modificado [17].
Se ha procedido de la misma forma, insertando botonería, hasta completar la
interfaz tal y como aparece en la ilustración 87:

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 120
Ilustración 87 Formato final del archivo figura1.fig
Esta interfaz toma el nombre de una señal, de la que además se debe facilitar su
tamaño muestral, así como la frecuencia a la que fue tomada y hace correr sobre ella el
programa “miprograma3.m”. Los valores de pertenencia a cada tipo de rodamiento que
son generados por este programa, son los que muestra nuestra GUI. Por este motivo,
necesitamos asociar de alguna manera el script de “miprograma3.m” al pulsador (Push
Button) de nuestra GUI. Es decir, se ha de describir el “callback” asociado al
“pushbutton”.
Para ver los “callbacks” asociados a cada uno de los objetos que se han creado
se ha de editar el archivo “figura1.m”.
En la ilustración 88 se muestra el aspecto final que tendrá el fichero “figura1.m”

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 121
Ilustración 88 Formato final del fichero figura1.m

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 122
Se observa cómo, por ejemplo, el objeto que Matlab® ha denominado
“Pushbutton1” tiene dos funciones asociadas, una que es su “callback” y le da
funcionalidad, y otra que es la que crea al objeto y le da apariencia. El propio programa
de Matlab®, da automáticamente sugerencias sobre las cosas que se pueden hacer con el
objeto editado.
A través del comando “get”, seremos capaces de capturar el texto que el usuario
haya introducido en el campo correspondiente [17]. Así, por ejemplo, si se escribe
dentro del espacio definido para la función “callback” del “edit1”:
archivo=get(handles.edit1, 'string');
Entonces Matlab® creará una variable con nombre “archivo”, y esa variable será
del tipo “String” (texto), y su valor será el texto introducido en ese espacio “edit1” .
Posteriormente se inserta el script del programa “miprograma3.m”.
Para acabar, se necesitan cuatro espacios en la GUI en los que presentar el
resultado, o sea, el porcentaje de pertenencia a cada tipo de rodamiento. Para ello se van
a crear cuatro espacios de texto que se dejarán en blanco (con un “string” vacío en la
ventana del inspector de propiedades) y usará el comando “set” (lo contrario de “get”),
para imponer los strings que hayan resultado de las operaciones realizadas por el script.
De este modo se escribirán los comandos:
set(handles.edit3, 'string', Porcentajes(1));
set(handles.edit2, 'string', Porcentajes(2));
set(handles.edit4, 'string', Porcentajes(3));
set(handles.edit5, 'string', Porcentajes(4));
Es decir, con set se fija el valor de la variable asociada al objeto mostrar [17].

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-DESARROLLO DEL PROYECTO- 123
Una vez realizadas estas operaciones, se tiene el detector de fallos en
rodamientos listo y con el aspecto que se muestra en la ilustración 89.
Ilustración 89 Ejemplo de utilización del interfaz gráfico

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-CONCLUSIONES- 124
5 CONCLUSIONES Y FUTUROS DESARROLLOS
5.1 CONCLUSIONES
Se ha conseguido elaborar un sistema de identificación de defectos en
rodamientos, con unas tasas de acierto que varían entre el 90 y el 100%, por lo que el
objetivo principal del proyecto de diseñar un método de mantenimiento predictivo para
rodamientos se considera cumplido en su totalidad.
Para probar el sistema diseñado, se utilizaron señales de vibración resales
obtenidas mediante el banco de ensayos “Rotor Kit MFS 2004” [15].
En una primera etapa del proyecto, se obtuvieron los espectros de frecuencia de
las señales de vibración correspondientes a distintos tipos de rodamientos. Primero,
simplemente mediante la transformada de Fourier y posteriormente mediante un
programa combinado que aplicaba la transformada de Hilbert y Fourier a la señal
temporal.
Tras esto se procedió a elaborar un clasificador basado en la lógica difusa, capaz
de identificar automáticamente si el rodamiento presentaba algún defecto y dónde
estaba localizado.
A continuación, a partir de los resultados obtenidos, se presenta las siguientes
con clusiones:
o En cuanto al procesamiento de la señal:
• Mediante la representación de la señal en el dominio del tiempo, no
se obtuvo información útil para identificar un tipo concreto de
defecto, debido al elevado nivel de ruido de la señal que además se
ve incrementado con la velocidad de giro del eje. No obstante esta
representación puede indicarnos la presencia de algún defecto ya que

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-CONCLUSIONES- 125
la amplitud de las vibraciones es mucho mayor en los rodamientos
dañados.
• La Transformada de Fourier se muestra ineficaz a la hora de intentar
localizar las frecuencias naturales de fallo.
• La transformada de Hilbert, como filtro previo al análisis frecuiencial
mediante la Transformada de Fourier, se muestra como una
herramienta mucho más potente que la representación temporal y la
transformada de Fourier para el análisis frecuencial de señales de
vibración.
• La combinación de las transformadas de Hilbert y Fourier, permite
obtener mejores resultados cuanto mayor es la velocidad de giro del
eje. Por este motivo, a la hora de elaborar el clasificador de lógica
difusa, se seleccionó como velocidad de giro del eje la mayor de las
posibles en este proyecto (30Hz).
• El error medio cometido al estimar la frecuencia de defecto ha sido
de un 1.09%. Siendo en el peor de los casos de un 2.03%. Estos
porcentajes de error tan bajos hacen pensar que los rodamientos
empleados no tenían defectos incipientes, sino bastante desarrollados.
o En cuanto a la elaboración del clasificador basado en lógica difusa:
• A la hora de construir el clasificador difuso, la pega más importante
fue que la frecuencia natural de fallo en pista interna era
significativamente más grande que las demás frecuencias naturales de
fallo. Por este motivo se tomaron frecuencias entre los 90 y los
300Hz para dar oportunidad a que el segundo múltiplo de la
frecuencia natural de fallo en pista interna apareciese.
• Las tasas de acierto mostradas por el programa para la identificación
de cada tipo de rodamiento fueron muy elevadas, por lo que el

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-CONCLUSIONES- 126
objetivo principal del proyecto, de construir un sistema de detección
de fallos en rodamientos se considera cumplido. Estas tasas variaron
entre el 90% y el 100%. Esta pequeña caída en la tasa de acierto se
debía a que el programa confundía en contadas ocasiones un
rodamiento normal con un rodamiento con fallo en bola o en la pista
exterior. No obstante al estar considerando un rodamiento normal
como dañado, en este pequeño porcentaje de ocasiones, nos
encontramos del lado de la seguridad.
o En cuanto a la optimización del clasificador basado en lógica difusa, para
que funcione con independencia de la velocidad de rotación del eje:
• Tras la construcción de un clasificador independiente de la velocidad
de giro del eje, se observó como la tasa de acierto en la identificación
de rodamientos, va disminuyendo a medida que lo hace la velocidad
de rotación.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-FUTUROS TRABAJOS- 127
5.2 FUTUROS DESARROLLOS
Dado que el porcentaje de acierto a la hora de identificar un rodamiento en
buenas condiciones es menor que en los demás casos, se propone desarrollar o
modificar el clasificador difuso para que permita alcanzar tasas de éxito similares a las
obtenidas al identificar otros tipos de rodamiento.
Otra línea de desarrollo sería la implantación del interfaz gráfico dentro del
sistema productivo de una fábrica, consiguiendo sincronizar la tarjeta de adquisición de
datos con el interfaz gráfico, así como desarrollar más en profundidad éste último,
consiguiendo hacerlo independiente del modelo de rodamiento.
Por último, otro aspecto que se podría desarrollar, será someter al sistema
diseñado, a pruebas con rodamientos de distintas características geométricas y distintos
tamaños de defecto.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-BIBLIOGRAFÍA- 128
6 BIBLIOGRAFÍA
[1] RUBIO, H, “Diseño mecánico” Apuntes de cuarto curso de la titulación ingeniería industrial. Universidad pública Carlos III de Madrid España, (2008). [2] SKF, “SKF Maintenance Products,” SKF ©, (2008). [3] WHITE, G, “introducción a Vibración de Máquinas,” Part Number 8569, versión 1.75, DLI Engineering, (1995). [4] ERICSON, S, GRIP, N, JOHANSON, E, PERSON, L, . SJÖBERG, R, y STRÖMBERG, J . “Automatic Detection of Local Bearing Defects in Rotating Machines Part 1,” Departmento de Matematicas de la Universidad Tecnológica de Lula, (2001). [5] BRAUN, S, “Analysis of Roller/Ball Bearing Vibrations,” ASME Publication. Paper n° 118/vol. 101, (1979). [6] ESTUPIÑAN, E, “Diagnostico de Fallas en Máquinas de Baja Velocidad Utilizando Análisis de Vibraciones, “Tesis presentada para obtener el grado de Magíster en Ciencias de la Ingeniería con Mención en Ingeniería Mecánica de la Universidad de Concepción – Chile, (2001). [7] MEIROVITCCH, L, “Elements of Vibration Analysis,” Second edition Mc Graw-Hill Book Company, (1986). [8] STEVENS, D, ”Machinery, Condition Monitoring". Disponible en: http://web.ukonline.co.uk/d.stevens2/. [9] RUBIO, H. “Caracterización de defectos localizados en sistemas mecánicos rotativos mediante análisis de vibraciones”. Tesis Doctoral. Universidad Carlos III de Madrid, Departamento de Ingeniería Mecánica, (2003). [10] BRAUN, S. “Discovering signal processing. An interactive guide for engineers”. Israel Institute of Technoloogy, Israel, (2008). [11] CHANG, R, “Química”, (2007) [12] THE MARHWORKS INC. “Fuzzy Logic Toolbox 2 User´s Guide”, (2009). Disponible en: http://www.mathworks.es/academia/student_center/tutorials/launchpad.html. [13] “Fundamentos de lógica difusa”. Documento interno Universidad de las Américas-Puebla. Disponible en: http://www.powerpointsgratis.net/logica-difusa-fundamentos/1/ [14] MUKAIDONO, M. “Fuzzy logic for beginners”. World Scientific, (2001).

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-BIBLIOGRAFÍA- 129
[15] MARTINEZ, I. “Detección de fallos en rodamientos mediante análisis de energía y lógica difusa”. Proyecto fin de carrera. Universidad Carlos III de Madrid, Departamento de Ingeniería Mecánica, (2007). [16] LARA, O, J. “Nuevas metodologías no invasivas de diagnosis de defectos incipientes en rodamientos de bola”. Tesis Doctoral. Universidad Carlos III de Madrid, Departamento de Ingeniería Mecánica, (2007). [17] THE MARHWORKS INC. “GUI Building Tutorial”, (2005). Disponible en: http://www.mathworks.es/academia/student_center/tutorials/launchpad.html.

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-ANEXOS- 130
7 ANEXOS
7.1 HOJA DE CARACTERÍSTICAS DEL RODAMIENTO.
Ilustración 90 Hoja de características del rodamiento utilizado
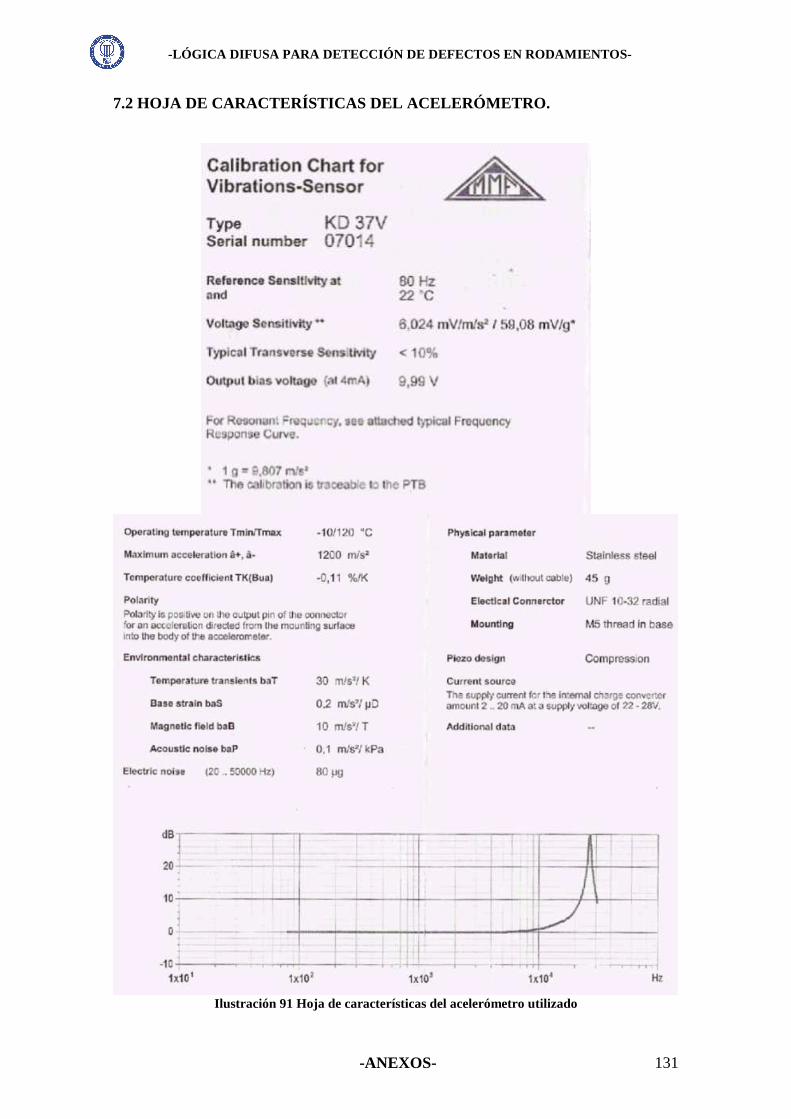
-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-ANEXOS- 131
7.2 HOJA DE CARACTERÍSTICAS DEL ACELERÓMETRO.
Ilustración 91 Hoja de características del acelerómetro utilizado

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-ANEXOS- 132
7.3 REGLAS DIFUSAS UTILIZADAS
[Rules]
1 2 0 0, 1 0 0 0 (0.33) : 1
2 0 2 0, 1 0 0 0 (0.33) : 1
3 0 0 2, 1 0 0 0 (0.33) : 1
4 4 0 0, 1 0 0 0 (0.33) : 1
5 0 4 0, 1 0 0 0 (0.33) : 1
6 0 0 4, 1 0 0 0 (0.33) : 1
7 8 0 0, 1 0 0 0 (0.33) : 1
8 0 8 0, 1 0 0 0 (0.33) : 1
9 0 0 8, 1 0 0 0 (0.33) : 1
10 2 4 0, 1 0 0 0 (0.66) : 1
11 2 0 4, 1 0 0 0 (0.66) : 1
12 0 2 4, 1 0 0 0 (0.66) : 1
13 2 8 0, 1 0 0 0 (0.66) : 1
14 2 0 8, 1 0 0 0 (0.66) : 1
15 0 2 8, 1 0 0 0 (0.66) : 1
16 4 8 0, 1 0 0 0 (0.66) : 1
17 4 0 8, 1 0 0 0 (0.66) : 1
18 0 4 8, 1 0 0 0 (0.66) : 1
19 4 4 0, 1 0 0 0 (0.66) : 1
20 4 0 4, 1 0 0 0 (0.66) : 1
21 0 4 4, 1 0 0 0 (0.66) : 1
22 2 4 8, 1 0 0 0 (1) : 1
23 2 4 4, 1 0 0 0 (1) : 1
24 1 0 0, 0 1 0 0 (0.33) : 1
25 0 1 0, 0 1 0 0 (0.33) : 1
26 0 0 1, 0 1 0 0 (0.33) : 1
27 6 0 0, 0 1 0 0 (0.33) : 1
28 0 6 0, 0 1 0 0 (0.33) : 1
29 0 0 6, 0 1 0 0 (0.33) : 1
30 1 1 0, 0 1 0 0 (0.66) : 1
31 1 0 1, 0 1 0 0 (0.66) : 1
32 0 1 1, 0 1 0 0 (0.66) : 1
33 1 6 0, 0 1 0 0 (0.66) : 1
34 1 0 6, 0 1 0 0 (0.66) : 1
35 0 1 6, 0 1 0 0 (0.66) : 1
36 6 6 0, 0 1 0 0 (0.66) : 1
37 6 0 6, 0 1 0 0 (0.66) : 1
38 0 6 6, 0 1 0 0 (0.66) : 1
39 1 1 6, 0 1 0 0 (1) : 1
40 1 6 6, 0 1 0 0 (1) : 1
41 10 0 0, 0 0 1 0 (0.33) : 1
42 0 10 0, 0 0 1 0 (0.33) : 1
43 0 0 10, 0 0 1 0 (0.33) : 1
44 7 0 0, 0 0 1 0 (0.33) : 1

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-ANEXOS- 133
45 0 7 0, 0 0 1 0 (0.33) : 1
46 0 0 7, 0 0 1 0 (0.33) : 1
47 9 0 0, 0 0 1 0 (0.33) : 1
48 0 9 0, 0 0 1 0 (0.33) : 1
49 0 0 9, 0 0 1 0 (0.33) : 1
50 8 0 0, 0 0 1 0 (0.33) : 1
51 0 8 0, 0 0 1 0 (0.33) : 1
52 0 0 8, 0 0 1 0 (0.33) : 1
53 10 7 0, 0 0 1 0 (0.66) : 1
54 10 0 7, 0 0 1 0 (0.66) : 1
55 0 10 7, 0 0 1 0 (0.66) : 1
56 10 9 0, 0 0 1 0 (0.66) : 1
57 10 0 9, 0 0 1 0 (0.66) : 1
58 0 10 9, 0 0 1 0 (0.66) : 1
59 7 9 0, 0 0 1 0 (0.66) : 1
60 7 0 9, 0 0 1 0 (0.66) : 1
61 0 7 9, 0 0 1 0 (0.66) : 1
62 10 8 0, 0 0 1 0 (0.66) : 1
63 10 0 8, 0 0 1 0 (0.66) : 1
64 0 10 8, 0 0 1 0 (0.66) : 1
65 7 8 0, 0 0 1 0 (0.66) : 1
66 7 0 8, 0 0 1 0 (0.66) : 1
67 0 7 8, 0 0 1 0 (0.66) : 1
68 10 10 0, 0 0 1 0 (0.66) : 1
69 10 0 10, 0 0 1 0 (0.66) : 1
70 0 10 10, 0 0 1 0 (0.66) : 1
71 10 7 9, 0 0 1 0 (1) : 1
72 10 7 8, 0 0 1 0 (1) : 1
73 10 10 7, 0 0 1 0 (1) : 1
74 3 0 0, 0 0 0 1 (0.5) : 1
75 0 3 0, 0 0 0 1 (0.5) : 1
76 0 0 3, 0 0 0 1 (0.5) : 1
77 5 0 0, 0 0 0 1 (0.5) : 1
78 0 5 0, 0 0 0 1 (0.5) : 1
79 0 0 5, 0 0 0 1 (0.5) : 1
80 7 0 0, 0 0 0 1 (0.5) : 1
81 0 7 0, 0 0 0 1 (0.5) : 1
82 0 0 7, 0 0 0 1 (0.5) : 1
83 3 5 0, 0 0 0 1 (0.8) : 1
84 3 0 5, 0 0 0 1 (0.8) : 1
85 0 3 5, 0 0 0 1 (0.8) : 1
86 5 5 0, 0 0 0 1 (0.8) : 1
87 5 0 5, 0 0 0 1 (0.8) : 1
88 0 5 5, 0 0 0 1 (0.8) : 1
89 5 7 0, 0 0 0 1 (0.8) : 1
90 5 0 7, 0 0 0 1 (0.8) : 1

-LÓGICA DIFUSA PARA DETECCIÓN DE DEFECTOS EN RODAMI ENTOS-
-ANEXOS- 134
91 0 5 7, 0 0 0 1 (0.8) : 1
92 3 5 5, 0 0 0 1 (1) : 1
93 5 5 7, 0 0 0 1 (1) : 1
94 11 0 0, 0 1 0 0 (0.33) : 1
95 0 11 0, 0 1 0 0 (0.33) : 1
96 0 0 11, 0 1 0 0 (0.33) : 1
97 1 11 0, 0 1 0 0 (0.66) : 1
98 1 0 11, 0 1 0 0 (0.66) : 1
99 0 1 11, 0 1 0 0 (0.66) : 1
100 6 11 0, 0 1 0 0 (0.66) : 1
101 6 0 11, 0 1 0 0 (0.66) : 1
102 0 6 11, 0 1 0 0 (0.66) : 1
103 1 6 11, 0 1 0 0 (1) : 1
104 4 10 7, 0 0 1 0 (1) : 1
105 4 10 8, 0 0 1 0 (1) : 1
106 4 4 8, 1 0 0 0 (1) : 1



























