Embed Size (px)
Citation preview
�
��� �� � �� �� �� ��
���� �� � �� � ����
����
��� �� � �� �� ����
���� � �� � �� � � �� � � �� ���� ��
���� �� � �� � �� ����
� �� � � �� � ����
� � �� � � ���� ��
JOSÉ ARNALDO REDINZ (DPF/UFV)
JULHO DE 2004
1
PREFÁCIO
Durante o tempo em que ministramos a disciplina Física 3, voltada para os estudantes de diversas engenharias,
física, química e matemática, notamos que uma grande parte deles não possuía o domínio da matemática que se
poderia esperar, tendo em vista os pré-requisitos dessa disciplina. O conteúdo da Física 3 exige tipicamente, para
seu desenvolvimento e completa compreensão, que o estudante entenda e saiba efetuar operações com vetores,
realizar derivadas, integrais definidas simples, integrais de linha, de superfície e de volume. No entanto não é esse
o estágio de muitos alunos que ingressam nessa disciplina. Poderíamos mencionar aqui inumeráveis exemplos,
retirados de nossa experiência, que revelam falta de intimidade por parte de muitos estudantes, com os conceitos
básicos de cálculo e, em alguns casos, de trigonometria, geometria, ou outra área mais fundamental da matemática.
Além disso, notamos muitas vezes, um completo desprezo pelo rigor mínimo que o uso da linguagem matemática
exige. Sinais são simplesmente trocados, um sinal + se transforma em um – magicamente, termos divergentes (1/0)
são desprezados, jogados para debaixo do tapete, parâmetros constantes se transformam em variáveis e vice-
versa, tudo para que enfim se emita uma “resposta” para o problema proposto. Não deveria ser esse, o
comportamento esperado de estudantes das áreas de ciências exatas, mas enfim, não pretendemos entrar aqui
nessa discussão. Apenas acreditamos que o mesmo desconforto que causaria em qualquer professor ver um
estudante escrever a frase “nóis vai lá purque nóis qué”, deve também causar ver um estudante escrever a equação
∫ −=a
adx
x02
11 .
Tendo em vista essa realidade, estamos nos propondo aqui a oferecer um texto que auxilie os estudantes,
relembrando, enfatizando e reforçando sua base matemática. Nosso texto é totalmente voltado para a disciplina
Física 3, nos limitaremos ao conteúdo relevante e a um enfoque que acreditamos seja útil e, ao mesmo tempo,
minimamente rigoroso para essa disciplina. Ao longo do texto propomos alguns poucos exercícios, para que o
estudante interessado teste seu conhecimento no assunto. O conteúdo exposto aqui pode ser encontrado em
qualquer livro de cálculo, e não estamos nos propondo a substituir disciplinas ou livros textos. Pelo contrário,
torcemos para que os estudantes cursem cada vez com mais interesse essas disciplinas, enxerguem a beleza que
a matemática muitas vezes revela, assimilem as lições de rigor e exatidão que essa ciência nos transmite e
procurem se inspirar nos autores de livros textos consagrados nessa área.
Ao chegar na disciplina Física 3, os estudantes já terão estudado todos os conceitos aqui discutidos, e já
devem ter tido oportunidade de exercita-los em diversos problemas. Mas a realidade é que, por algum motivo que
nos escapa à elucidação, um sem-número de estudantes “esquece” quase tudo em um tempo muito curto. Talvez o
desprezo pelo rigor matemático, quiçá revelador de um desprezo pela própria matemática, esteja relacionado com
esse fenômeno. Será concebível um estudante de medicina, ou um médico que desprezem a biologia? Não
sejamos ingênuos, deve haver muitos, afinal, ninguém precisa saber o que é uma mitocôndria para prescrever um
remédio para gripe. Só nos resta torcer para que não nos deparemos com eles no percurso, ou nos percalços, de
nossas vidas. Como já se disse, ensinar não é encher um balde vazio, ensinar é acender uma chama. Por algum
motivo, que não pretendemos discutir aqui, essa chama às vezes permanece inerte, fria como o gelo.
Não possuímos formação específica em um curso formal de matemática, seja em nível de graduação ou
pós-graduação. Por isso apresentaremos uma visão da matemática do ponto de vista de um físico, cientes de
nossas limitações nessa área, mas cientes também de nossas responsabilidades e deveres acadêmicos. Não
queremos, no entanto, que fique a impressão de que somos simples leigos “chutadores”. Acreditamos que
possuímos formação e experiência, na área de matemática, suficientes para a tarefa – modesta - a que nos
2
propomos. Na graduação cursamos várias disciplinas nessa área, além de outras que cursamos, por vontade
própria, no IMPA (Instituto de Matemática Pura e Aplicada), no Rio de Janeiro. Acima de tudo admiramos a
matemática e temos a esperança de transmitir, e quem sabe contagiar, essa admiração no texto que se segue.
Algumas vezes somos questionados na sala de aula, se o que estamos abordando trata-se de física ou de
matemática. Na nossa opinião, e de muitas autoridades no assunto, não podemos separar uma ciência da outra. Já
se disse que “a física é o estudo dos fenômenos naturais passíveis de descrição matemática”, o resto seria
astrologia. A essa propriedade da natureza, que a faz descritível através de formulações matemáticas, P. A. M.
Dirac, prêmio Nobel de física, denominou “qualidade matemática da natureza”. A física e a matemática evoluíram e
evoluem juntas, como nos casos do cálculo com a mecânica clássica, e da análise vetorial com o eletromagnetismo.
A física também gera matemática, como no caso da teoria ergódica, toda uma área moderna de pesquisa na
matemática que teve origem após os trabalhos de Boltzmann na mecânica estatística. Por essas razões,
acreditamos que ao incentivar o estudo da matemática estaremos melhorando a formação dos estudantes em física.
Para a elaboração desse texto nos baseamos principalmente na coleção de quatro livros de títulos Cálculo 1,
Cálculo 2 e etc. de George B. Thomas Jr., professor emérito de matemática do MIT/USA. Nossos exemplares
desses livros foram editados pela LTC em 1978, e foram adquiridos, num golpe de sorte, na Feira do Livro Usado
em Vitória, ES, nos tempos de faculdade. Segundo o autor desses livros, os estudantes devem ser expostos desde
cedo à idéia de que uma derivada é uma taxa de variação, e de que uma integral é uma soma. Procuraremos
enfatizar aqui essa visão prática do cálculo.
1- FUNÇÕES, LIMITES E GRÁFICOS DE FUNÇÕES:
Uma função é uma regra que associa elementos de um conjunto (domínio) a elementos de outro conjunto (imagem).
A cada elemento do domínio a regra associa apenas um elemento da imagem. Nos limitaremos aqui principalmente
a funções definidas em conjuntos de números. Se f é a função, dizemos que f associa Dx ∈ a Ixf ∈)( . Por
exemplo, a função 2: xxf → associa a um número no conjunto dos reais ( ℜ ) um outro número no conjunto dos
reais positivos ( +ℜ ). Escrevemos simplesmente 4)2( ==xf ou ainda 9)3( =−f . A função módulo xxf →:
também associa números em ℜ a números em +ℜ , por exemplo, 3)3( =f e 5)5( =−f . De maneira geral
2xx = .
Algumas vezes uma função não está nem definida em um ponto particular, por exemplo ax = , mas
podemos estar interessados no valor dessa função quando nos aproximamos infinitamente desse ponto. Se o ponto
ax = está “perdido” no meio do domínio de f , podemos nos aproximar dele tanto pela esquerda quanto pela
direita. Chamamos essa operação - de aproximação infinita da variável x do ponto ax = - de tomar o limite de x
tendendo a a , denotada por ax→lim . Quando nos aproximarmos pela esquerda, ou seja, por valores de x
menores do que a , denotamos o limite por −→axlim . Quando nos aproximarmos pela direita, ou seja, por valores
de x maiores do que a , denotamos o limite por +→axlim . Se ax = está no domínio de f , ou seja, se está
definida a imagem )(af , então, a função f é dita contínua em ax = se )(lim)()(lim xfafxfaxax +− →→
== .
Por exemplo, a função )1/(1)( −= xxf não está definida em 1=x e ∞→→ )(lim 1 xfx . Essa notação ∞→
significa que )(xf , nesse limite, é maior que qualquer número positivo que você puder imaginar. A função
xxxf /)(sen)( = não está definida em 0=x , pois resulta em 0/0 , mas pode-se demonstrar que nesse caso
1)(lim 0 =→ xfx .
Na figura (1) mostramos os gráficos de algumas funções bastante comuns:

3
a) bxaxf +=)( com a e b constantes, cujo gráfico é uma reta, que passa pelo ponto
))0(,0( bfx == e que possui inclinação a .
b) cxbxaxf ++= 2)( , cujo gráfico é uma parábola, com a “boca” para cima se 0>a ou para baixo se
0<a .
c) x
axf =)( , cujo gráfico é uma hipérbole, que não está definida em 0=x .
d)
≥<
=2
2)(
2 xparax
xparaxxf , cujo gráfico apresenta uma descontinuidade em 2=x . Note nesse gráfico
a indicação de que em 2=x a função assume o valor 4, marcado com a bola cheia �, e não 2,
marcado com a bola vazada �.
e) xkexf =)( , que também denotamos por )(exp)( xkxf = .
f) xxf ln)( = , o logaritmo natural, que só está definido para 0>x .
FIGURA 1: gráficos de algumas funções comuns.
Podemos definir também funções de várias variáveis, como, por exemplo, 22),( yxyxf += e
ϕθϕθ sencos),,( rrf = . A área A de um retângulo de lados x e y , por exemplo, é dada pela função
yxyxA =),( . Os gráficos dessas funções são representados por superfícies ou outros objetos mais complicados
e até mesmo impossíveis de serem desenhados no plano.
Exercício: Faça gráficos das funções xxf =)( e )1/(1)( −= xxf com 55 <<− x .
Antes de avançarmos, é interessante fazer aqui uma revisão das propriedades de algumas funções que aparecem
freqüentemente em física.
• Função exponencial: ( ) xkexkxf == exp)( com k uma constante. A base e vale aproximadamente
71828,2≈e . Note que ( )( ) )()()exp()exp()exp(exp)( bfafbkakbkakbakbaf ==+=+=+ .
• Função logaritmo natural, ou neperiano: xxf ln)( = . A função logaritmo natural é a inversa da função
exponencial, pois se bea = então ab ln= , ou ainda, ( )xex ln= e ( )xx lnexp= . O logaritmo natural é
o logaritmo na base e , ou seja, o logaritmo natural de um número 0>x é o número y a que temos que
elevar a base e para que dê como resultado x , ou seja, yex = . Note que
( ) )()(lnlnln)( bfafbababaf +=+== e ( ) )(lnln)( afkakaaf kk === com k um número
racional. A propriedade ( ) baba lnlnln += está nas raízes históricas da origem da função logaritmo.

4
Antes da existência das calculadoras eletrônicas, a tarefa de multiplicar dois números grandes requeria um
bocado de tempo e esforço. John Napier (daí o nome neperiano) teve a idéia de criar uma função que
permitisse a realização de produtos através de somas. Assim, para calcular ba , primeiro se achava em
uma tabela de logaritmos os números aln e bln , se somava esses dois números e finalmente se
procurava novamente na tabela qual o número correspondente ao logaritmo ba lnln + . Note ainda que
01ln = e que ( ) −∞→→ 0ln x . Já mencionamos que a função logaritmo só este definida no conjunto
dos números positivos. De fato, o logaritmo de um número negativo é um número imaginário, por exemplo,
( ) πi=−1ln , com 1−=i . Poderíamos nos perguntar por que as funções exponencial e logaritmo estão
definidas na base e , um número que vale aproximadamente 718,2 e que além de irracional é
transcedental. De fato, a escolha dessa base está na raiz da própria definição de logaritmo, como área
abaixo da hipérbole, e por conseguinte, na função exponencial, como inversa da função logaritmo. Nada
nos impede de definir funções exponencial e logaritmo em bases diferentes, como por exemplo, o logaritmo
decimal ( yx 10= ). No entanto, a base e se integra de uma maneira única às outras funções e permite
escrevermos igualdades intrigantes como, por exemplo: ( )θθθ ii ee −+= 21cos e ainda 01 =+πie .
• Função seno: xxf sen)( = . Trata-se de uma função periódica que assume valores no intervalo ]1,0[ e de
período π20 =T , pois )()( 0 xfTxf =+ para todo x . Vale ainda 00sen)0( ==f e
12/sen)2/( == ππf . A inclusão de uma constante k , na forma ( )xkxf sen)( = define uma função de
período T arbitrário, dependente do valor de k . De fato, para satisfazer a igualdade )()( xfTxf =+ , ou
seja, ( ) ( )xkTxk sen)(sen =+ , deve valer: ( ) ( )xkTkxk sensen =+ , ou seja, π2=Tk e portanto
kT /2π= .
• Função co-seno: xxf cos)( = . Possui propriedades análogas às da função seno. Vale 10cos)0( ==f e
( ) 02/cos)2/( == ππf . Vale lembrar ainda que ( ) abbaba cossencossensen +=+ e
bababa sensencoscos)(cos −=+ . Ainda: 1cossen 22 =+ xx para todo x .
2 – DERIVADAS DE FUNÇÕES:
Consideremos a tarefa de calcular a inclinação de uma reta dada (veja a figura (2a)). Assumindo que as escalas nos
eixos vertical e horizontal são as mesmas, a inclinação da reta é simplesmente a tangente do ângulo que a reta faz
com o eixo horizontal x . Essa inclinação pode ser então medida com um transferidor ou simplesmente calculada
através da construção de um triângulo retângulo cuja hipotenusa coincide com a reta. Assim, se m é a inclinação
da reta, obtemos:
x
ym
∆∆== θtan
Por exemplo, se um veículo viaja com velocidade constante V numa estrada reta, então sua posição ao
longo da estrada crescerá linearmente no tempo t , isto é, tVxtx += 0)( . O gráfico de )(tx versus t será uma
reta e a inclinação dessa reta será a velocidade V do veículo, ou seja:
Vtt
ttV
tt
tVxtVx
tt
txtx
t
xm =
−−
=−
+−+=
−−
=∆∆=
12
12
12
1020
12
12 )()()()(
sendo 1t e 2t tempos arbitrários.
Consideremos agora a tarefa de calcular a inclinação m de uma curva, dada por uma função )(xf
contínua (veja a figura (2b)). É fácil notar que essa inclinação, de fato a inclinação da reta tangente à curva, muda
em cada ponto. Assim, é mais correto falarmos da inclinação )(xm da curva no ponto x . Podemos simplesmente

5
desenhar uma corda que conecta o ponto ))(,( xfx a um ponto mais adiante ))(,( xxfxx ∆+∆+ sobre a curva.
A inclinação dessa corda é:
x
xfxxf
xxx
xfxxfmcorda ∆
−∆+=−∆+−∆+= )()()()(
FIGURA 2: inclinação (derivada) de uma reta e de uma curva.
Se imaginarmos agora que o ponto ))(,( xxfxx ∆+∆+ se aproxima do ponto ))(,( xfx , podemos ver que a
corda se aproxima da reta tangente à curva no ponto ))(,( xfx . Ou seja:
x
xfxxfxm x ∆
−∆+= →∆)()(
lim)( 0 (1)
Por exemplo, se 2)( xxf = , então 222 )(2)()( xxxxxxxxf ∆+∆+=∆+=∆+ e assim:
xxxx
xxx
x
xxxxxxm xxx 22lim
)2(lim
)(2lim)( 00
222
0 =∆+=∆
∆+∆=
∆−∆+∆+
= →∆→∆→∆
A nova função )(xm , obtida da função )(xf , é chamada de derivada da função )(xf . Essa nova função é
representada comumente de duas formas, dependendo da conveniência. Podemos representar a função derivada
por )(' xf ou ainda:
dx
df (2)
Nessa última expressão os símbolos diferenciais df e dx representam novas variáveis, que, por definição, estão
relacionadas por: dxxfdf )('= (veja a figura (2b)).
Na tabela que se segue exibimos algumas funções de uso freqüente e suas derivadas. Considere que k é
uma constante:
Função )(xf Derivada )(' xf
nx 1−nxn
)(sen xk )(cos xkk
)(cos xk )(sen xkk−
xke xkek
xln x/1
Podemos definir também derivadas de ordem superior, como a derivada segunda de )(xf no ponto x ,
representada por '))('()('' xfxf = , ou ainda
2
2
dx
fd
dx
df
dx
d =
Definimos também a derivada terceira )(''' xf (ou )()3( xf ) e etc.

6
Caso não tomemos o limite 0→∆x , mas consideremos simplesmente x∆ pequeno, obtemos uma
expressão que aproxima a função f em um ponto xx ∆+ em termos dessa mesma função em um outro ponto x ,
ou seja:
xxfxfxxf ∆+≈∆+ )(')()( )0( ≈∆x
A figura (2b) ilustra essa aproximação. Note que a expressão acima aproxima o verdadeiro salto em )(xf ,
)()( xfxxff −∆+=∆ , pelo valor de df , que é de fato o salto ao longo da reta tangente. Quanto menor o valor
de x∆ , mais df se aproxima de f∆ .
Por exemplo, se 2)( xxf = , então 9)3( =f e 61,9)1,3( =f exatamente. Caso não soubéssemos,
poderíamos estimar o valor de )1,3(f pela expressão acima, resultando em:
6,96,09)1,0(29)1,0()(')3()1,03()1,3(33
=+=+=+≈+=== xx
xxffff
A notação ax
xf=
)( usada acima denota a função )(xf avaliada em .ax =
Se quiséssemos uma maior precisão nos cálculos, poderíamos fazer uso do Teorema de Taylor, que define
a série de Taylor como uma expressão exata para uma função (infinitamente diferenciável) f em um ponto xx ∆+
em termos dessa mesma função e de suas derivadas, em um outro ponto x :
( ) ( ) ...!3
)('''
!2
)('')(')()( 32 +∆+∆+∆+=∆+ x
xfx
xfxxfxfxxf
sendo 1)...2)(1(! −−= nnnn a função fatorial ( 1!1!0 == ). Esse teorema se aplica a um grande conjunto de
funções, como polinômios, xsen , xe , etc.
Assim, voltando ao nosso exemplo, como xxf 2)('' = , 2)(''' =xf e 0)()2( => xf n , obtemos:
( )61,901,06,09
2
1,0)('')1,0()(')3()1,03()1,3(
2
33=++=++=+= == xx
xfxffff
que é o valor exato de 2)1,3( . Caso nos deparemos com uma função cujas derivadas são todas não nulas,
poderemos obter valores aproximados simplesmente truncando a séria em algum ponto. A posição em que
truncamos a série é arbitrária, dependendo da precisão almejada.
Exercício: Use a série de Taylor para estimar o valor de 3 3,27 com 5 casas decimais. Confira seu
resultado usando uma calculadora (note que 3273 = ).
Uma outra forma de aproximar funções por séries é a que faz uso da Fórmula Binomial de Newton. Todos
sabemos desenvolver as séries 222 2)( bbaaba ++=+ e 32233 33)( bbabaaba +++=+ . Qual será a
expansão de 15)( ba + ? Isaac Newton respondeu essa pergunta, mais ainda, ele respondeu todas as perguntas, ou
seja:
...!3
)2)(1(
!2
)1()( 33221 +−−+−++=+ −−− ba
NNNba
NNbaNaba NNNNN (3)
para N inteiro positivo. Podemos compactar essa expressão na forma:
∑=
−
−=+
N
n
nnNN banNn
Nba
0 )!(!
!)(
Um caso particular dessa expressão é, para 1=a :
∑= −
=+N
n
nN bnNn
Nb
0 )!(!
!)1(
Consideremos então a função 15)1()( xxf += . Quanto vale 15)01,1( ? A calculadora nos fornece imediatamente
...16096.1)01,1( 15 = Como exercício, vamos esquecer esse resultado por enquanto e vamos estimar o valor de 15)01,1( usando a série binomial de Newton. Note que para 0≈x , vale:

7
...6
131415
2
1415151)1( 3215 +××+×++≈+ xxxx
Então:
( ) 000455,00105,015,01)01,0(455)01,0(10501,0151)01,01()01,1( 321515 +++=+++≈+=
Finalmente:
160955.1)01,1( 15 ≈
No caso da função α)1()( xxf += com α não sendo um inteiro positivo, a expansão binomial se transforma
numa série infinita, dada pela equação (3).
Voltando às derivadas, se )(xff = e )(txx = , ou seja, se f é uma função implícita de t , usamos a
regra da cadeia para calcular dtdf / :
dt
dx
dx
df
dt
df = (4)
Por exemplo, se )(sen)( θθ kf = com k uma constante, então, seja θku = . Nesse caso )(uff = e )(θuu = ,
e portanto:
)cos()(cossen θθθθθ
kkkukd
du
du
d
d
du
du
df
d
df ====
Um outro exemplo: considere uma caixa d’água que tem a forma de um paralelepípedo de base retangular
de lados a e b e altura L . Uma torneira está enchendo essa caixa com uma vasão de ϑ litros por segundo.
Partindo da caixa vazia em 0=t , quanto tempo leva para a caixa encher?
Seja )(th a altura do nível da água no tempo t ( 0)0( =h ). Então, o volume de água contido na caixa no tempo t
é )()( thbatV = (em 3m ). Se não há vazamentos de água, a taxa de variação no tempo desse volume deve ser
exatamente ϑ (em sm /3 ), ou seja:
ϑ===dt
dhba
dt
dh
dh
dV
dt
dV então
abdt
dh ϑ= (em sm / ).
Essa última equação (diferencial) é fácil de ser resolvida, obtemos:
tab
tab
hthϑϑ =+= )0()( e portanto, o instante em que a caixa encherá será aquele *t para o qual Lth =)( * ,
ou seja ϑ
abLt =* (em segundos).
Exercício: use a regra da cadeia para calcular a derivada de )()( xgexf = em relação à x , sendo )(xg
uma função diferenciável.
O fato de que a derivada de )(xf calculada em 0x é a inclinação da reta tangente à curva de )(xf
versus x no ponto 0x sugere muitas aplicações práticas desse conceito. Por exemplo, se 0x estiver “perdido” no
meio do domínio de f e se nesse ponto a função contínua f apresenta um máximo ou um mínimo, então, vale
0)(' 0 == xxf . Consideremos o seguinte exemplo: Um fabricante de latas de alumínio para refrigerantes deseja
fazer uma lata cilíndrica que contenha um dado volume ϑ ( 3cm ). Supondo que essa lata deverá ter base circular
de raio R e altura H , determinemos as dimensões ideais da lata para que o gasto de material seja mínimo.
Primeiramente podemos identificar uma relação entre R e H dada por HR 2πϑ = , sendo que ϑ será
considerado uma constante nesse problema. O gasto G de material, considerando que a folha de alumínio tem
uma espessura dada, pode ser medido pela área da lata, duas tampas na forma de disco e um retângulo lateral, ou
seja:
)(222),( 22 RHRHRRHRG +=+= πππ

8
À primeira vista pode parecer que G é uma função de duas variáveis, mas de fato existe um vínculo que relaciona
R e H . Assim, podemos eliminar, por exemplo, a variável H usando 2/ RH πϑ= e assim:
)(2)( 2
RRRG
πϑπ +=
Note que se quisermos economizar muito na área da base da lata, fazendo 0→R , então ∞→G . Se, por outro
lado, economizarmos na altura da lata, fazendo 0→H , então 2/ RH πϑ= implica que ∞→R e novamente
∞→G . Deve haver um valor intermediário de R , entre 0 e ∞ , para o qual o gasto é mínimo. De fato, na figura
(3) que mostra o gráfico de )(RG versus R , podemos identificar um ponto de mínimo *R .
FIGURA 3: gráfico do gasto de material em uma lata de volume fixo em função do raio da base.
Para achar o valor desse *R ótimo basta resolver a equação:
0*
=RdR
dG ou seja, 3
*2*
*
202
πϑ
πϑ =⇒=− RR
R
Usando a relação entre H e R obtemos a altura compatível com esse raio, ou seja:
*3
* 22
2 RH ==π
ϑ
Concluímos então, que a lata mais econômica é aquela que tem seção transversal vertical quadrada, de lado ** 2 RH = . Será que no mundo real se obedece a essa proporção? Para testar, medimos uma lata comum de
refrigerante, de 350 ml . Obtivemos cmRREAL 25,3≈ e cmH REAL 4,12≈ , correspondendo a um volume da lata 3411 cmREAL ≈ϑ . Para esse volume real, as dimensões ideais econômicas seriam:
cmR 4* ≈ e cmH 8* ≈
Conclusão: as dimensões da lata real estão bem distantes das dimensões ideais. O gasto de material com a lata
real é 23,319)( cmRG REAL ≈ , enquanto que o gasto ideal seria 2* 03,306)( cmRG ≈ . Há portanto uma gasto em
excesso de aproximadamente 23,13 cm de material, cerca de %3,4 a mais do que o ideal. Uma hipótese para
essa aparente insensatez, é que talvez as crianças não conseguissem segurar em uma mão uma lata que tivesse
cm8 de diâmetro. Daí elas beberiam menos refrigerantes e o que pareceria barato para o fabricante acabaria
saindo caro.
Para uma função de uma variável apenas, )(xf , podemos interpretar a derivada da seguinte forma: se
partirmos de um ponto 0x e nos deslocarmos um pouco para frente no eixo x, para dxx +0 )0( ≈dx , a função f
dá um salto do valor )( 0xf para o valor dxxfxfdxxf )(')()( 000 +=+ . Ou seja, o tamanho do salto na função
f é dxxfdf )(' 0= . Consideremos agora uma função de duas variáveis ),( yxf . O gráfico dessa função é uma
superfície. Se partirmos de um ponto ),( 00 yx e andarmos um pouco para frente, qual será o salto na função
),( yxf ? A resposta a essa pergunta depende da direção em que andarmos. Agora podemos nos deslocar sobre
um plano, o plano xy , e existem infinitas direções que podem ser tomadas, partindo de um ponto. Consideremos

9
então que vamos andar ao longo do eixo x , mantendo y constante ( 0y= ). Nesse caso, sairemos do ponto
),( 00 yx e vamos para o novo ponto ),( 00 ydxx + . O salto em f será:
dxx
fdf
yx 00 ,∂∂=
Consideremos agora que vamos andar ao longo do eixo y , mantendo x constante ( 0x= ). Nesse caso, sairemos
do ponto ),( 00 yx e vamos para o novo ponto ),( 00 dyyx + . Nesse caso, o salto em f será:
dyy
fdf
yx 00 ,∂∂=
As funções x
fyxf x ∂
∂=),( e dy
fyxf y
∂=),( são as derivadas parciais da função f . No caso de nos
deslocarmos simultaneamente em x e em y , do ponto ),( 00 yx para o ponto ),( 00 dyydxx ++ , o salto em f
será:
dyy
fdx
x
fdf
yxyx0000 ,, ∂
∂+∂∂= (5)
Por exemplo, considere um balão de borracha de forma cilíndrica, com base circular de raio R e altura H .
Suponha que estejamos enchendo esse balão de tal forma que seu raio esteja aumentando na taxa constante Rϑ
( )/ sm e que sua altura esteja aumentando na taxa constante Hϑ ( sm / ). Qual a taxa de variação no tempo do
volume V do balão?
A relação entre as variáveis do problema é HRHRV 2),( π= . Note que nesse caso, diferentemente do caso da
lata que abordamos anteriormente, R e H são duas variáveis independentes.
A taxa que estamos procurando é:
dt
dH
H
V
dt
dR
R
V
dt
dVdH
H
VdR
R
VdV
∂∂+
∂∂=⇒
∂∂+
∂∂=
com: Rdt
dR ϑ= e Hdt
dH ϑ= . Vale também, RHR
V π2=∂∂
e 2RH
V π=∂∂
. Assim:
HR tRtHtRdt
dV ϑπϑπ )()()(2 2+= (em )/3 sm
Nessa expressão acima, deixamos por substituir as funções: tRtR Rϑ+= )0()( e tHtH Hϑ+= )0()( .
Podemos usar essa mesma idéia acima para deduzir uma expressão para a derivada da razão entre duas
funções )(/)( xgxf . Seja gfgfU /),( = , então:
22 )]([
)(')()(')()(')('
1
)(
)(
xg
xgxfxfxgxg
g
fxf
gdx
dg
g
U
dx
df
f
U
dx
dU
xg
xf
dx
d −=−=∂∂+
∂∂==
Exercício: Determine 3 números reais positivos cuja soma seja um número fixo M e cujo produto P seja
máximo. Dica: Defina a função zyxzyxP =),,( , elimine nessa função uma das variáveis, digamos
yxMz −−= e ache os valores de x e y para os quais 0/ =∂∂ xP e 0/ =∂∂ yP .
3 - VETORES:
Na física encontramos grandezas que ficam bem definidas através da simples atribuição de seu valor numérico, as
chamadas grandezas escalares. Um exemplo é a temperatura. Por outro lado, existem grandezas que guardam
mais informações que uma simples magnitude. Um exemplo é a velocidade instantânea de um veículo. A
10
velocidade é uma grandeza vetorial, ou seja, uma grandeza que, para estar completamente definida, deve ter
especificadas sua magnitude (digamos hKm /100 ), sua direção (digamos, ao longo do eixo norte-sul) e seu
sentido (do norte para o sul, por exemplo). Outros exemplos de grandezas vetoriais são a força, a aceleração e o
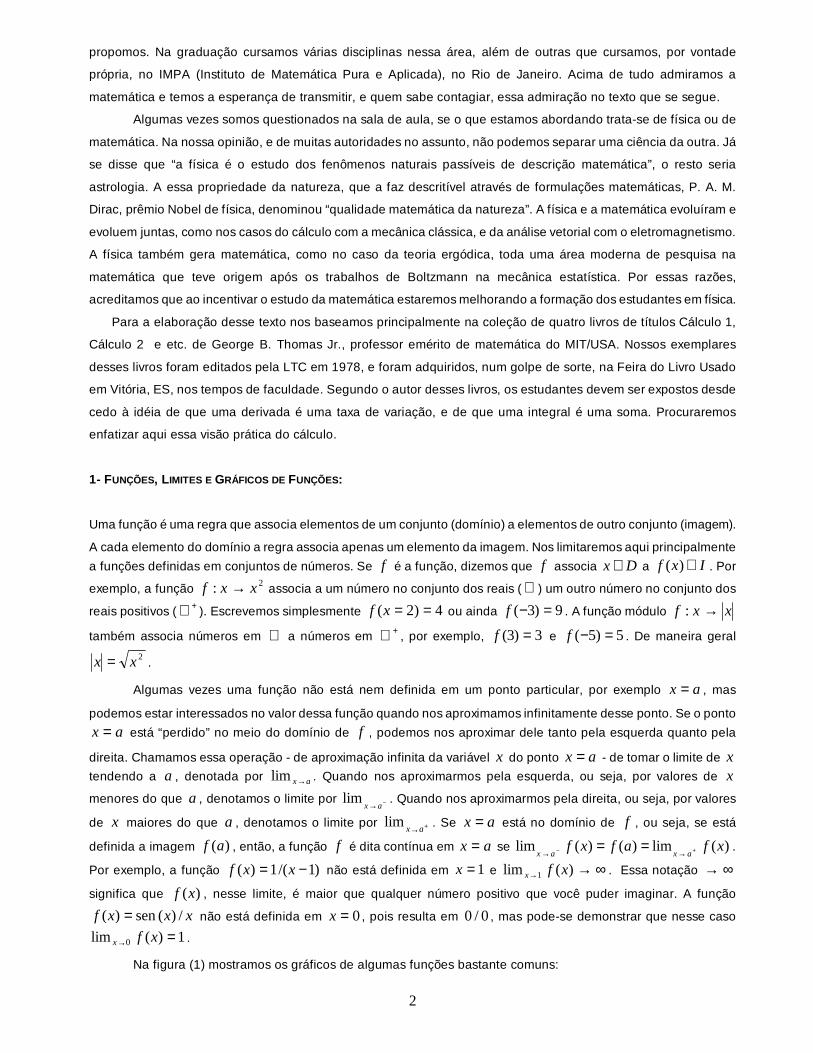
torque. Podemos representar os vetores através de setas, com um tamanho (a magnitude da grandeza física), uma
direção e um sentido bem definidos. Um vetor é denotado comumente por A�
e a magnitude, ou módulo, do vetor
por AA =�
.
Podemos definir três operações básicas entre dois vetores A�
e B�
. Para definir o vetor soma BAS���
+= ,
desenhamos A�
e B�
com suas extremidades iniciais no mesmo ponto. Completamos a figura de um paralelograma.
O vetor S�
é então o que está ao longo da diagonal do paralelograma, partindo da origem comum de A�
e B�
. Uma
outra maneira de definir BAS���
+= é desenhar o vetor A�
, desenhar o vetor B�
com sua extremidade inicial na
ponta do vetor A�
, então, S�
é o vetor que sai do início de A�
e tem a ponta na ponta de B�
(veja a figura (4)). Ao
fazer essas operações, só devemos tomar o cuidado de deslocar (transladar) os vetores mantendo suas
propriedades básicas intactas, quais sejam: módulo, direção e sentido. Se B�
é um vetor, então B�
− é um outro
vetor de mesmo módulo, mesma direção mas sentido contrário ao de B�
( 0)(���
=−+ BB ).
FIGURA 4: definição geométrica da soma de dois vetores.
Podemos definir duas operações de produto entre vetores. O produto escalar entre dois vetores A�
e B�
,
denotado por BA��
• , dá como resultado um escalar:
θcosBABA����
=• (6)
em que θ é o menor ângulo entre os vetores A�
e B�
(desenhados com suas extremidades iniciais no mesmo
ponto). Na figura (5a), é fácil ver que a projeção de A�
sobre B�
, que denotaremos por BA é θcosAAB
�
= e da
mesma forma, a projeção de B�
sobre A�
é θcosBBA
�
= . Portanto, podemos escrever o produto escalar como:
AB BABABA ==•��
Se dois vetores A�
e B�
são ortogonais entre si ( 2/πθ = ), ou seja, se um vetor não tem projeção (sombra) sobre
o outro, então 0=• BA��
. Por exemplo, na física, o trabalho de uma força F�
constante, que atua em um objeto ao
longo de um deslocamento d�
é dado por:
FdF dFdFdFW ==•=��
Portanto, se essa força não tem componente ao longo do deslocamento, 0=FW .

11
FIGURA 5: produto escalar e produto vetorial entre dois vetores. Regra da mão direita.
O produto vetorial entre dois vetores A�
e B�
, denotado por BA��
× , dá como resultado um terceiro vetor
BAV���
×= . Esse vetor é definido pelas seguintes propriedades:
- O módulo de BAV���
×= é θsenBABAV =×=���
, sendo θ o menor ângulo entre os vetores A�
e
B�
(desenhados com suas extremidades iniciais no mesmo ponto).
- A direção de BAV���
×= é ortogonal ao plano definido pelos vetores A�
e B�
.
- O sentido de BAV���
×= é definido pela regra da mão direita: passando os dedos da mão direita no
sentido que vai de A�
para B�
, através do menor ângulo (θ ), o dedo polegar apontará no sentido de
BAV���
×= (veja a figura (5b)).
É fácil ver que ABBA����
×−=× e que 0���
=× BA se A�
e B�
possuem a mesma direção ( 0=θ ou πθ = ). Na
física, o torque de uma força F�
que atua num ponto de posição r�
em relação a um ponto de referência é:
FrF ×= ��τ
Assim, se r�
e F�
forem colineares, não haverá torque.
Podemos definir funções vetoriais, como )(xA�
ou ),( txB�
. As derivadas dessas funções obedecem a
regras bastante simples, quais sejam:
dx
BdAB
dx
AdxBxA
dx
d�
��
�
��
•+•=• )()( e dx
BdAB
dx
AdxBxA
dx
d�
��
�
��
×+×=× )()(
Na próxima seção abordaremos a representação algébrica (não geométrica) de vetores, através de suas
componentes em sistemas de coordenadas. Um conceito que nos será útil é o de vetor unitário, que denotaremos
por A , ao invés de A�
, e que é simplesmente um vetor de módulo 1. Esses vetores são então úteis para
representar direções e sentidos bem definidos no espaço.
4 – SISTEMAS DE COORDENADAS:
Um sistema de coordenadas é uma maneira de nos referirmos aos pontos do espaço em termos algébricos. Um
ponto no espaço é um objeto geométrico e existem infinitas maneiras de nos referirmos a ele. Em geral um sistema
de coordenadas é definido através de uma estrutura de eixos de referência, em relação aos quais as coordenadas
são “medidas”. No espaço real, tridimensional, precisamos sempre de três coordenadas para nos referirmos a um
único ponto.
4.A – COORDENADAS CARTESIANAS
No sistema de coordenadas cartesianas, cada ponto do espaço é associado a três números reais que representam
as projeções desse ponto em três eixos ortogonais entre si, os eixos x , y e z (veja a figura (6a)). As projeções de

12
um vetor são de fato segmentos orientados, ou seja, que possuem um sinal. As projeções que ficam “de cabeça
para baixo”, ou seja, ao longo das porções negativas dos eixos, são negativas. Então, no sistema cartesiano os
pontos do espaço são representados por ),,( zyx com x , y e z números que variam de ∞− a ∞+ .
FIGURA 6: sistemas de coordenadas cartesianas, cilíndricas e esféricas.
Um vetor desenhado no espaço, na presença de um referencial cartesiano, pode ser decomposto em três componentes xA , yA e zA , que são as projeções (positivas ou negativas) do vetor ao longo de cada um dos eixos
coordenados. Podemos então representar o vetor A�
algebricamente por zyx AAAA ,,(=�
). Uma maneira mais
prática de representar os vetores é através dos vetores unitários x , y e z . O vetor x , por exemplo, aponta na
direção e no sentido do crescimento da coordenada x . Dessa forma, como já sabemos somar vetores, é fácil
constatar que:
zAyAxAA zyx ˆˆˆ ++=�
As operações com vetores que definimos anteriormente ficam bastante fáceis de serem realizadas usando
as componentes cartesianas. Primeiramente notamos que 1ˆˆ =• xx , 1ˆˆ =• yy , 1ˆˆ =• zz e que 0ˆˆ =• yx ,
0ˆˆ =• zx , 0ˆˆ =• yz , e ainda 0ˆˆ�
=× xx , 0ˆˆ�
=× yy , 0ˆˆ�
=× zz e mais ainda zyx ˆˆˆ =× , yzx ˆˆˆ −=× , xyz ˆˆˆ −=× .
Usando então a propriedade distributiva da soma e do produto, obtemos: 222zyx AAAAAA ++=•=
���
zBAyBAxBABA zzyyxx ˆ)(ˆ)(ˆ)( +++++=+��
zzyyxx BABABABA ++=•��
zBABAyBABAxBABABA xyyxzxxzyzzy ˆ)(ˆ)(ˆ)( −+−+−=×��
Consideremos a tarefa de calcular a distância d entre dois pontos, que para simplificar, suporemos
contidos no plano xy . Sejam ),( 11 yx e ),( 22 yx esses dois pontos. Construímos os dois vetores yyxxA ˆˆ 11 +=�
e yyxxB ˆˆ 22 +=�
. Na figura (7), é fácil ver que a distância procurada é o módulo do vetor BAD���
−= , assim:
221
2212121 )()(ˆ)(ˆ)( yyxxyyyxxxBADd −+−=−+−=−==
���

13
FIGURA 7: distância entre dois pontos, vista como o módulo de um vetor diferença.
Exercício: Sejam zyxA ˆ2ˆ6ˆ3 −+=�
e zyxB ˆˆ9ˆ3 −+−=�
. a) Determine: BA��
+ , BA��
− , BA��
• e
BA��
× . b) Calcule o menor ângulo entre A�
e B�
. Faça desenhos desses vetores.
4.B – COORDENADAS CILÍNDRICAS
No sistema de coordenadas cilíndricas, os pontos do espaço são indexados por três números reais, a distância em
relação a um eixo ( z ), que chamamos de r , uma projeção ao longo desse eixo, a mesma coordenada z definida
anteriormente, e um ângulo entre a projeção do raio r no plano xy e o eixo x , chamado de ϕ (veja a figura (6b)).
Então, no sistema cilíndrico os pontos do espaço são representados por ),,( ϕzr com r variando de 0 a ∞+ , z
de ∞− a ∞+ , e ϕ de 0 a π2 .
Analogamente ao que fizemos para o sistema de coordenadas cartesianas, podemos aqui definir três
vetores unitários: r que aponta na direção e no sentido do crescimento do raio r , z (o mesmo das coordenadas
cartesianas) e ϕ que aponta na direção e no sentido do crescimento do ângulo ϕ . Assim, qualquer vetor pode ser
escrito em termos das suas componentes cilíndricas:
ϕϕ ˆˆˆ AzArAA zr ++=�
Note que, diferentemente dos vetores unitários x , y e z , os vetores r e ϕ não são constantes, ou seja,
dependendo do ponto do espaço, esses vetores podem ter direções e sentidos bem diversos. É fácil notar que
)(ˆˆ ϕrr = (ou seja, r é função do ângulo ϕ ) e que também )(ˆˆ ϕϕϕ = . Podemos notar também que a direção de
ϕ é a direção tangente às circunferências paralelas ao plano xy e centradas no eixo z . O sentido de ϕ é dado
pela regra da mão direita: apontando o dedo polegar na direção e sentido do eixo z , os outros dedos apontam no
sentido de ϕ .
Como exemplo, suponha que uma pedra fixa num barbante, de comprimento R , esteja sendo girada no
plano constante do barbante com velocidade angular constante ω . Determinemos o vetor velocidade linear V�
dessa pedra. Adotando um sistema cilíndrico com origem no centro da órbita da pedra e eixo z ortogonal ao seu
plano de giro, o vetor posição da pedra será então )(ˆ)( trRtr =�
. Note que r depende do tempo t . Então,
sabendo que de fato ))((ˆˆ trr ϕ= e que ωϕ =dtd / (estamos admitindo que ϕ está aumentando com o tempo, ou
seja, estamos fazendo uma hipótese sobre o sentido de giro da pedra), obtemos:
ϕωϕ
ϕϕ
d
rdR
dt
d
d
rdRtrR
dt
d
dt
rdV
ˆˆ))((ˆ ====
�
�
Para terminarmos o problema, falta encontrar então a derivada ϕdrd /ˆ . Para isso precisamos conhecer a relação
entre r e ϕ , ou seja, precisamos conhecer a função )(ˆˆ ϕrr = . Não entraremos nesse nível de detalhe aqui. Mas
podemos terminar nosso exemplo reconhecendo o fato de que a velocidade linear da pedra deverá ser tangente à

14
órbita da pedra, ou seja, tangente a um círculo centrado no eixo z . Essa direção é simplesmente ϕ . Assim, mesmo
sem provar, podemos afirmar que:
ϕϕ
ˆˆ
=d
rd
Portanto, a velocidade linear da pedra é ϕω ˆRV =�
.
Exercício: Escreva o vetor r�
em coordenadas cartesianas.
4.C – COORDENADAS ESFÉRICAS
No sistema de coordenadas esféricas, os pontos do espaço são indexados por três números reais, a distância em
relação a uma origem, que chamamos de r (note que esse r tem um significado bem diferente do r das
coordenadas cilíndricas) , um ângulo entre esse raio r e um eixo vertical ( z ) , chamado de θ e um ângulo entre a
projeção do raio r no plano xy e o eixo x , chamado de ϕ (veja a figura (6c)). Assim, no sistema esférico os
pontos do espaço são representados por ),,( ϕθr com r variando de 0 a ∞+ , θ de 0 a π , e ϕ de 0 a π2
(note que não é necessário que θ varie de 0 até π2 ).
Analogamente ao que fizemos para os outros sistemas de coordenadas, podemos aqui definir três vetores
unitários: r que aponta na direção e no sentido do crescimento do raio r , θ que aponta na direção e no sentido do
crescimento do ângulo θ e ϕ que aponta na direção e no sentido do crescimento do ângulo ϕ . Qualquer vetor
pode ser escrito em termos das suas componentes esféricas:
ϕθ ϕθ ˆˆˆ AArAA r ++=�
Note que, aqui também, diferentemente dos vetores unitários x , y e z , os vetores r , θ e ϕ não são
constantes, ou seja, dependendo do ponto do espaço, esses vetores podem ter direções e sentidos bem diversos. É
fácil notar que ),(ˆˆ ϕθrr = (ou seja, r é função dos ângulos θ e ϕ ) e que também ),(ˆˆ ϕθθθ = e ),(ˆˆ ϕθϕϕ = .
Suponhamos que um satélite de massa m esteja girando em torno da terra, sob ação da gravidade.
Podemos mostrar que a órbita desse satélite está contida em um plano. Para isso, só precisamos saber que a força
gravitacional é central, ou seja, está sempre direcionada na linha que passa pelo satélite e pelo centro da terra.
Consideremos um referencial esférico fixo com origem no centro da terra. Se F�
é a força gravitacional que atua no
satélite, então rFF r ˆ=�
( F�
é central). Pela 2a Lei de Newton, a aceleração a�
do satélite também é radial, ou
seja, raa r ˆ=�
. Assim, seja L�
o momento angular do satélite, em relação à origem, VmrL�
�
�
×= , sendo r�
a
posição e dtrdV /�
�
= a velocidade do satélite. Então:
armVVmdt
VdrmV
dt
rdmVmr
dt
d
dt
Ld ��
��
�
�
�
�
�
�
�
×+×=×+×=×= )(
Mas, sabemos que 0���
=×VV e que, pelo mesmo motivo, 0ˆˆˆ�
��� =×=×=× rrararar rr . Conclusão: o satélite se
move com momento angular mantido constante, ou seja CtVtr��
� =× )()( , C�
não dependendo do tempo. Como C�
é ortogonal a r�
e a V�
, então, reciprocamente, r�
e V�
são ortogonais a um vetor constante. Daí, r�
e V�
se
mantém no plano ortogonal ao vetor C�
, ou seja, a órbita está confinada a um plano.
Exercício: Escreva o vetor r�
em coordenadas cartesianas.

15
5 – INTEGRAIS INDEFINIDAS E DEFINIDAS:
Consideremos agora a tarefa de, dada uma função (derivada) )(xf , encontrar uma função (primitiva) )(xF tal que
)()(' xfxF = . A essa operação, inversa da derivação, damos o nome de integração (indefinida). A notação para
essa operação é:
Se )()(' xfxF = então ∫= dxxfxF )()(
Dizemos que F é a primitiva de f . Por exemplo, a primitiva de )(sen)( xkxf = , com k uma constante, é
CkxkxF +−= /)(cos)( , em que C é uma constante arbitrária. Essa constante C sempre aparece na
integração indefinida pois a derivada de uma constante é nula. Da mesma forma, a primitiva de xxf /1)( = é
CxxF += ln)( . Nem toda função possui primitiva. Por exemplo, a integral
dxxI ∫ −= )(exp 2
não existe pois não há nenhuma função )(xF que, se derivada, resulta em )(exp)( 2xxf −= .
Quando discutimos as funções exponencial e logaritmo vimos que uma é a inversa da outra, ou seja,
( )xx lnexp= e ( )xex ln= . Dessa forma, o que a operação exp faz, a operação ln desfaz e vice-versa.
Poderíamos representar, simbolicamente, esse faz-desfaz da seguinte forma: 1lnexp = e 1expln = . Com isso
queremos dizer que, simbolicamente: xxx ==1)(lnexp e xxe x ==1)(ln . Da mesma forma, as operações de
integração e derivação são uma a inversa da outra. De fato, se )()(' xfxF = , então:
∫ ∫ ∫ === )()(')( xFdFdxxFdxxf
Assim, na notação que introduzimos anteriormente, poderíamos dizer que, simbolicamente:
∫ =1d e também ∫ =1d
O objetivo principal da integral indefinida é a solução de equações diferenciais, ou seja, encontrar a solução
para uma equação que envolve funções e derivadas de funções. As equações diferenciais aparecem em profusão
na física, na química, na biologia teórica e nas engenharias mais fundamentais. Pensando nas derivadas como
taxas de variação, as equações diferenciais relacionam então funções com suas taxas de variação, com as taxas de
variação de suas taxas de variação (derivadas segundas) e etc.
Exercício: Considere uma partícula submetida a uma força constante xFF ˆ=�
. Segundo Newton, a taxa
de variação da taxa de variação no tempo da posição dessa partícula é proporcional a F�
, ou seja:
m
Fr
dt
d�
�
=2
2
, sendo m a massa da partícula. Encontre a trajetória )(tr�
dessa partícula. Faça desenhos
dessas trajetórias para várias condições iniciais diferentes.
Aqui estaremos mais interessados no conceito de integral definida. Seja )(xf uma função contínua e
positiva, então, o Teorema Fundamental do Cálculo afirma que a área A delimitada superiormente pela curva de
)(xf , inferiormente pelo próprio eixo x , e nas laterais pelas retas ax = e abx >= é dada por (veja a figura
(8)):
∫ −===b
a
b
aaFbFxFdxxfA )()()()(
sendo a função F a primitiva de f .

16
FIGURA 8: elemento infinitesimal de área, que integrado, resulta na área abaixo da curva.
Aqui começamos a visualizar a integral como uma soma. Pensamos na construção de pequenas fatias,
retângulos de alturas variáveis )(xf e de larguras dx , que definem áreas infinitesimais dxxfdA )(= , que
somadas, fornecem a área definida anteriormente. Assim:
∫=REGIÃO
dAA
em que a notação REGIÃO denota a idéia de que a integral é definida, ou seja, a soma é realizada apenas dentro de
uma região específica.
Consideremos a tarefa, bastante simples, de calcular a área de um retângulo de lados a e b usando a
idéia exposta acima. Começamos adotando um referencial, posicionando um dos vértices do retângulo na origem
de um sistema cartesiano xy (veja a figura (9)). Um segundo passo é definir o elemento infinitesimal de área dA .
Essa escolha é ditada basicamente pela forma das bordas da região em que a integral, ou seja, a soma, será
realizada. Nesse caso as bordas são claramente retas, o que sugere a escolha de elementos de área também retos,
ou seja, retangulares. Há então três opções. Na primeira definimos dxadA = e então:
babaxadxadxadAAbx
x
bb
REGIÃO
=−===== ∫ ∫∫=
=
)0(0
00
Uma segunda opção é escolher dybdA = e então:
baabybdybdybdAAay
y
aa
REGIÃO
=−===== ∫ ∫∫=
=
)0(0
00
A última opção é escolher dydxdA = e obtemos então uma integral dupla:
∫ ∫ ∫∫∫=
=
=
=
=−−=====bx
x
ay
y
aab
b
REGIÃO
baabyxdydxdydxdAA0 0 0
000
)0)(0(
FIGURA 9: diferentes elementos infinitesimais de área para uma região de contornos retos.
Suponha que uma chapa retangular de lados a e b e de espessura desprezível possua densidade de
massa (por unidade de área) ρ (kg/m2) não homogênea, ou seja, ),( yxρρ = . Vamos determinar a massa M

17
dessa chapa usando a idéia da integral como uma soma. Para podermos realizar os cálculos até o fim,
abordaremos aqui dois casos particulares. Suponhamos inicialmente um caso mais simples, em que ρ só depende
de x , ou seja, )(xρρ = . Nesse caso, podemos definir lâminas verticais, como fizemos anteriormente. A massa de
uma lâmina qualquer, localizada na coordenada x , será dada por dxaxdAxdm )()( ρρ == , e assim:
∫=REGIÃO
dmM
A região nesse caso é a delimitada pelas bordas da chapa, ou seja, bx <<0 e ay <<0 . Portanto, se 2)( xx αρ = (kg/m2), por exemplo, com α constante:
∫ ∫∫=
=
=====bx
x
b b
REGIÃO
ba
xadxxadxxadxaxM
0 0
3
0
322
33)( ααααρ (kg)
Suponhamos agora que ρ só depende de y , ou seja, )(yρρ = . Nesse caso, podemos definir lâminas
horizontais, a massa de uma lâmina qualquer, localizada na coordenada y , será dada por
dybydAydm )()( ρρ == . Portanto, se yy αρ =)( (kg/m2), por exemplo, com α constante:
∫ ∫∫=
=
=====ay
y
a a
REGIÃO
ab
ybdyybdyybdybyM
0 0
2
0
2
22)( ααααρ (kg)
Note que nos exemplos acima não tivemos escolha na definição do elemento infinitesimal de massa. Se
)(xρρ = , então a lâmina infinitesimal tem que ser uma região =x constante, ou seja, uma lâmina vertical. Por
outro lado, se )(yρρ = , então a lâmina infinitesimal tem que ser uma região =y constante, ou seja, uma lâmina
horizontal.
Caso as bordas da região de integração não sejam retas, como no caso de um círculo, é mais conveniente
que usemos um sistema de coordenadas curvas, como o cilíndrico ou o esférico. Esses dois sistemas, quando
0=z , no caso do sistema cilíndrico e quando 2/πθ = , no caso do sistema esférico, se resumem ao sistema de
coordenadas polares, qual seja: ),( ϕr . Essas duas coordenadas no plano permitem a construção de um elemento
infinitesimal de área que tem a forma de um anel, de raio r e espessura dr , ou seja, de área drrdA π2= (veja a
figura (10)).
FIGURA 10: elemento infinitesimal de área, um anel, para uma região de contorno circular.
Consideremos então a tarefa de mostrar que a área delimitada por um círculo de raio R é 2RA π= . Basta
pensarmos no disco de raio R como uma soma de infinitos anéis de áreas infinitesimais drrdA π2= . Assim:
∫ ∫ ∫=
=
=====REGIÃO DISCO
Rr
r
R
Rr
drrdrrdAA0
2
0
2
2222 ππππ
Imaginemos um disco, de espessura desprezível, cuja densidade de massa ρ ( 2/ mKg ) seja não uniforme, no
caso )(rρρ = . Vamos determinar a massa M desse disco. Fatiando o disco em anéis infinitesimais, o anel de
18
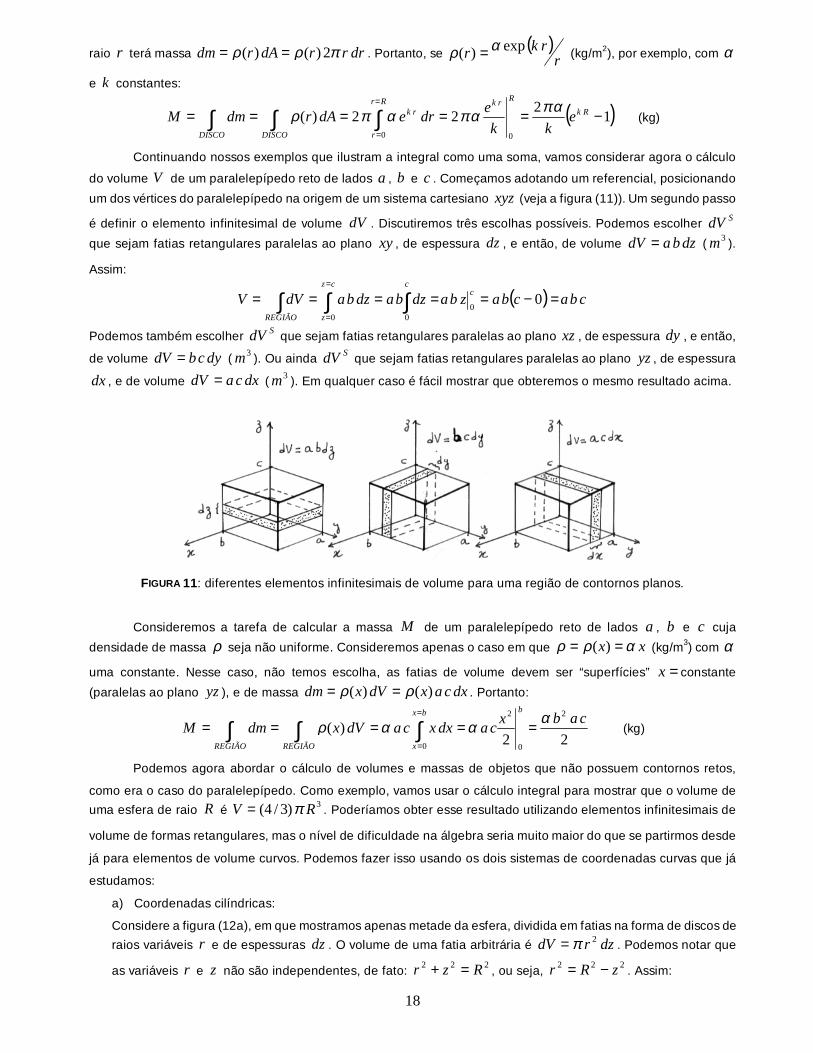
raio r terá massa drrrdArdm πρρ 2)()( == . Portanto, se ( )
rrkr exp)( αρ = (kg/m2), por exemplo, com α
e k constantes:
( )12
22)(0 0
−===== ∫ ∫ ∫=
=
Rk
DISCO DISCO
Rr
r
Rrkrk e
kk
edredArdmM
απαπαπρ (kg)
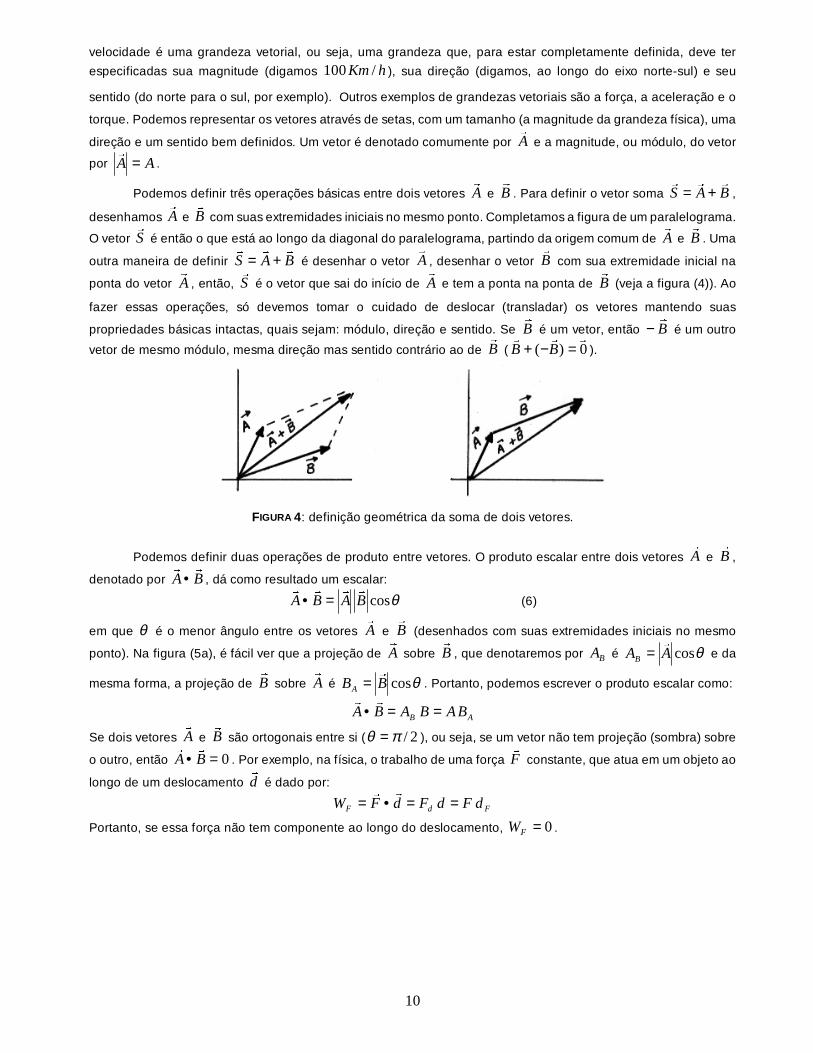
Continuando nossos exemplos que ilustram a integral como uma soma, vamos considerar agora o cálculo
do volume V de um paralelepípedo reto de lados a , b e c . Começamos adotando um referencial, posicionando
um dos vértices do paralelepípedo na origem de um sistema cartesiano xyz (veja a figura (11)). Um segundo passo
é definir o elemento infinitesimal de volume dV . Discutiremos três escolhas possíveis. Podemos escolher SdV
que sejam fatias retangulares paralelas ao plano xy , de espessura dz , e então, de volume dzbadV = ( 3m ).
Assim:
( )∫ ∫∫=
=
=−=====cz
z
cc
REGIÃO
cbacbazbadzbadzbadVV0 0
00
Podemos também escolher SdV que sejam fatias retangulares paralelas ao plano xz , de espessura dy , e então,
de volume dycbdV = ( 3m ). Ou ainda SdV que sejam fatias retangulares paralelas ao plano yz , de espessura
dx , e de volume dxcadV = ( 3m ). Em qualquer caso é fácil mostrar que obteremos o mesmo resultado acima.
FIGURA 11: diferentes elementos infinitesimais de volume para uma região de contornos planos.
Consideremos a tarefa de calcular a massa M de um paralelepípedo reto de lados a , b e c cuja
densidade de massa ρ seja não uniforme. Consideremos apenas o caso em que xx αρρ == )( (kg/m3) com α
uma constante. Nesse caso, não temos escolha, as fatias de volume devem ser “superfícies” =x constante
(paralelas ao plano yz ), e de massa dxcaxdVxdm )()( ρρ == . Portanto:
∫ ∫ ∫=
=
=====REGIÃO REGIÃO
bx
x
bcabx
cadxxcadVxdmM0
2
0
2
22)(
αααρ (kg)
Podemos agora abordar o cálculo de volumes e massas de objetos que não possuem contornos retos,
como era o caso do paralelepípedo. Como exemplo, vamos usar o cálculo integral para mostrar que o volume de
uma esfera de raio R é 3)3/4( RV π= . Poderíamos obter esse resultado utilizando elementos infinitesimais de
volume de formas retangulares, mas o nível de dificuldade na álgebra seria muito maior do que se partirmos desde
já para elementos de volume curvos. Podemos fazer isso usando os dois sistemas de coordenadas curvas que já
estudamos:
a) Coordenadas cilíndricas:
Considere a figura (12a), em que mostramos apenas metade da esfera, dividida em fatias na forma de discos de
raios variáveis r e de espessuras dz . O volume de uma fatia arbitrária é dzrdV 2π= . Podemos notar que
as variáveis r e z não são independentes, de fato: 222 Rzr =+ , ou seja,
222 zRr −= . Assim:

19
∫ ∫∫ =
−=−====
=REGIÃO
RR
RRz
z
Rz
zRdzzRdzrdVV 3
0
3
0
2
0
22
0
2
3
4
32)(22 ππππ
Note que o fator 2 foi introduzido acima porque a integral em dz foi realizada apenas para metade de uma
esfera.
Exercício: Mostre que o volume de um cone circular reto, com base de raio R , e com altura H é
3/2 HRV π= . Considere que o cone é fatiado em lâminas na forma de discos paralelos a sua base.
b) Coordenadas esféricas:
Na figura (12b) mostramos um elemento de volume infinitesimal construído com as coordenadas esféricas.
Trata-se de uma casca esférica de raio r e espessura dr e, portanto, de volume drrdV 24π= (lembre-se
que a área da superfície esférica de raio r é 24 rπ ). A simplicidade do cálculo abaixo evidencia o fato de que,
para um objeto de contorno esférico, as coordenadas mais apropriadas são as esféricas. De fato:
∫ ∫ ∫=
=
====REGIÃO
Rr
r
R
RdrrdrrdVV0 0
322
3
444 πππ
Exercício: Determine a massa de uma esfera de raio R , cuja densidade de massa por unidade de volume é
dada por rr αρ =)( , sendo α uma constante e r o raio (variável) medido em relação ao centro da esfera.
FIGURA 12: diferentes elementos infinitesimais de volume para uma região de contorno esférico.
Quando discutimos a integral de uma função )(xf , consideramos que estas eram realizadas com os
valores da variável x percorrendo um intervalo do próprio eixo x , ou seja, a integral era realizada sobre um
segmento de linha reto. Poderíamos generalizar essa idéia e considerar uma integral que fosse realizada em uma
variável que assumisse valores sobre uma linha curva. Essas integrais são chamadas de integrais de linha. Para
ficar mais clara a idéia, consideremos a tarefa de mostrar que o comprimento de uma circunferência de raio R é
RC π2= . Podemos demonstrar esse resultado pensando na integral como uma soma de elementos infinitesimais
de comprimento, que não são os dx , pois estes não estão sobre o eixo reto x , e nem dy , pois não estão também
sobre o eixo reto y . Pelo contrário, os pedacinhos de comprimento infinitesimais estão definidos sobre a curva da
circunferência. Vamos chamá-los genericamente de ds . Assim:
∫=CURVA
dsC
Na figura (13a) mostramos a definição de um ds ao longo de uma circunferência. Os ds são de fato pequenos
arcos de circunferência infinitesimais. Mostramos também nessa figura que, quando 0→ds , os arcos se tornam

20
retas, hipotenusas de triângulos cujos catetos são comprimentos infinitesimais dx e dy . Dessa forma, do teorema
de Pitágoras obtemos 22 )()( dydxds += , e portanto:
∫ +=CURVA
dydxC 22 )()(
FIGURA 13: elemento infinitesimal de deslocamento (comprimento) ao longo de uma circunferência.
Consideremos então apenas a metade superior da circunferência. Essa curva pode ser descrita pela função 22)( xRxy −= com RxR ≤≤− . Portanto, ao longo da curva da circunferência, como não poderia deixar de
ser, x e y não são variáveis independentes entre si, donde concluímos que dx e dy também não são. De fato,
de )(xy obtemos:
22 xR
x
dx
dy
−
−=
Conclusão, substituindo essa equação na integral que fornece C obtemos:
∫ ∫ ∫+=
−= − −=
−+=
+=
CURVA
Rx
Rx
R
R xR
dxRdx
xR
xdx
dx
dyC
2222
222
1212
Note que o fator 2 foi introduzido acima porque a integral fornece o comprimento apenas da metade superior da
circunferência.
Não entraremos em detalhes aqui sobre como realizar essa última integral. De fato trata-se de uma integral
bastante comum e que consta nas tabelas de qualquer livro de cálculo. Nos limitaremos a utilizar seu resultado, qual
seja:
∫ +=−
.arcsen22
constR
x
xR
dx
Portanto, chegamos finalmente a:
( ) ( ){ RRRR
xRC
R
R
πππ2)
2(
22}1arcsen1arcsen2arcsen2 =
−−=−−==
−
Essa mesma tarefa de calcular o comprimento de uma circunferência, se realizada no sistema de
coordenadas polares, torna-se muito mais simples. Consideremos a figura (13b), em que mostramos o comprimento
infinitesimal ds ao longo da circunferência “pensado” como um arco infinitesimal subentendido por um ângulo
infinitesimal ϕd . Assim, se (e somente se) ϕd for expresso em radianos (ou seja, como um número de fato
adimensional), vale a relação entre o arco, o ângulo e o raio do círculo: ϕdRds = . Portanto:
∫ ∫∫=
=
=====CURVACURVA
RRdRdRdsCπϕ
ϕ
π πϕϕϕ2
0
2
02

21
Como nosso último exemplo, de integral de linha, consideremos o seguinte problema, que mescla os
conceitos de vetores e integrais: Um partícula está descrevendo uma órbita circular de raio R , girando no sentido
horário. Existem várias forças atuando nessa partícula, produzindo como resultado essa órbita, mas vamos nos
concentrar apenas em uma. Seja xykF ˆ=�
(com 0>k uma constante) uma força atuando nessa partícula, sendo
a coordenada y definida com o referencial cartesiano no centro da órbita circular (veja a figura (14a)). Essa força
então é sempre horizontal e possui módulo que aumenta com o aumento de y . No 1o e no 2o quadrantes a força
tem o sentido do eixo x , enquanto que no 3o e no 4o quadrantes a força tem o sentido contrário ao do eixo x .
FIGURA 14: um campo vetorial de forças definido no plano e um vetor deslocamento ao longo de uma
circunferência.
Vamos determinar o trabalho FW realizado pela força F�
em uma volta completa da partícula. Já sabemos
que trabalho é dFWF
��
•= , para uma força constante e para um deslocamento d�
. No entanto, não é esse o caso
aqui pois a força F�
é variável (depende de y ) e ainda o deslocamento se dá ao longo de uma curva. Portanto,
vamos definir o trabalho infinitesimal FdW realizado em um deslocamento infinitesimal sd�
: sdFdWF
�
�
•= . Essa
expressão está correta pois, quando 0→sd�
, a força se torna constante (pois sd�
se resume a um ponto) e, além
disso, o deslocamento sd mesmo sendo curvo, se torna reto (qualquer curva suave, vista com um microscópio, se
torna uma sucessão de pequenas retas). Assim, o trabalho será dado pela soma, ou seja, pela integral dos
trabalhos infinitesimais:
∫ ∫ •==CURVA CURVA
FF sdFdWW�
�
Falta então definirmos os vetores sd�
. Esses vetores devem ser tangentes ao deslocamento da partícula. Como
esse deslocamento se dá ao longo de um círculo no plano xy , e no sentido horário, então ϕdssd −=�
. Além disso,
o deslocamento ds é tangente à circunferência, e portanto é um pequeno arco (pelo fato de que ds se torna reto,
quando 0→sd�
, poderíamos também pensa-lo como a hipotenusa de um pequeno triângulo, como fizemos no
exemplo anterior do cálculo do comprimento da circunferência), donde concluímos que ϕdRds −= (com ϕd ) em
radianos. Note que introduzimos um sinal negativo nessa última equação porque o ângulo ϕ aumenta no sentido
anti-horário, enquanto que o deslocamento s da partícula se dá no sentido horário, assim, quando ϕd é positivo, o
ds é negativo. Portanto, segue que:
ϕϕϕϕ dxykRdRFWCURVACURVA
F )ˆˆ()ˆ( •=•= ∫∫�
Notamos que a expressão acima mistura coordenadas de dois sistemas diferentes: o sistema cartesiano e o
sistema polar. Para realizar a integral devemos homogeneizar as variáveis, todas num mesmo sistema de
coordenadas. Sendo o contorno da órbita circular, esperamos que o sistema polar seja mais conveniente para esse
problema. Assim, de acordo com a figura (14b), notamos que:

22
ϕsenRy = e ( ) ϕϕπϕϕ sen2/cosˆˆˆˆ =−=• xx
Finalmente, chegamos a:
∫=
=
=πϕ
ϕ
ϕϕ2
0
22 sen dkRWF
Essa última integral pode ser realizada através do uso de uma identidade trigonométrica:
∫∫ +−=
−= .
4
)2(sen
22
)2(cos1sen 2 constdd
θθθθθθ
Portanto, concluímos finalmente que:
kRWF2π=
Note que o trabalho é positivo porque a força F�
está sempre “a favor” do sentido de deslocamento da partícula.
Exercício: Calcule o trabalho dessa mesma força definida acima, mas sobre uma partícula que descreve
uma órbita restrita a um quadrado de lado a , centrado na origem do plano xy , com lados paralelos aos
eixos coordenados. Considere a partícula “girando” no sentido horário.