Embed Size (px)
Citation preview

Scuola Politecnica e delle Scienze di Base Corso di Laurea in Ingegneria Informatica Elaborato finale in Misure per l'Automazione e la Produzione Industriale
Applicazione della trasformata Huang - Hilbert all'analisi dei guasti elettrici
Anno Accademico 2014/2015 Candidato: Filippo Di Iorio matr. N46001253

"Potete ottenere tutto ciò che volete, se lo desiderate con grande intensità.
Potete essere tutto ciò che volete, avere tutto ciò che desiderate, realizzare tutto ciò che vi proponete…
Sempre che vi impegniate a tradurre in atto i vostri desideri con totale fermezza di propositi."

Indice
Indice .................................................................................................................................................. III
Introduzione ......................................................................................................................................... 4
Metodi di analisi di segnali non-stazionari ...................................................................................... 4
a) Trasformata di Fourier ............................................................................................................. 4 b) Trasformata Wavelet ............................................................................................................... 5
c) Wigner - Ville distribution ....................................................................................................... 6
Capitolo 1: Trasformata Huang - Hilbert ............................................................................................. 7
1.1) Ampiezza e Frequenza Istantanee ............................................................................................ 7
1.1.1) Osservazione ...................................................................................................................... 8
1.2) Empirical Mode Decomposition method ................................................................................ 10
1.3) Lo spettro di Hilbert ................................................................................................................ 12
Capitolo 2: Ensemble Empirical Mode Decomposition .................................................................... 14
2.1) Problema del Mode Mixing .................................................................................................... 14
2.2) Ensemble EMD ....................................................................................................................... 15
2.3) Esempio di applicazione ......................................................................................................... 17
Capitolo 3: Rilevazione dei guasti in una rete di potenza .................................................................. 21
3.1) Fasore dello spazio complesso ................................................................................................ 21
3.2) Calcolo della posizione dell'errore con HHT.......................................................................... 22
3.3) Calcolo della velocità dell'onda .............................................................................................. 23
3.4) Esempio di applicazione ......................................................................................................... 25
3.4.1) Localizzare il guasto ........................................................................................................ 25
Conclusioni ........................................................................................................................................ 27
Bibliografia ........................................................................................................................................ 28
4
Introduzione
Qualsiasi sistema elettrico/elettronico odierno è basato interamente su scambio e
elaborazione di dati, è per questo che la loro analisi è di fondamentale importanza.
L'analisi dei dati si prefigge 2 obiettivi: determinare i parametri necessari a costruire un
modello del sistema e confermare il funzionamento del modello costruito a
rappresentazione di un fenomeno fisico.
Sfortunatamente l'analisi dei dati può incorrere in problematiche date dalla struttura dei
dati stessi, per esempio: (1) il data set è troppo corto (2) i dati non sono stazionari (3) i dati
sono la rappresentazione di processi non lineari.
Metodi di analisi di segnali non-stazionari
Di fronte alle problematiche sopra citate, sono stati introdotti vari metodi di analisi dei
dati, storicamente l'analisi di Fourier ha rappresentato la soluzione più generale, insieme
ad altri metodi quali Trasformata Wavelet e Wigner-Ville distribution.
a) Trasformata di Fourier
Un qualsiasi segnale 𝑥(𝑡) a tempo continuo, può essere espresso come somma di
componenti sinusoidali attraverso l'applicazione della trasformata di Fourier, definita in
seguito.
Sia 𝑥(𝑡) reale e 𝐶0∞1. La sua Trasformata di Fourier 𝑋(𝑓) è definita come:
𝑋(𝜔) = ∫ 𝑥(𝑡)𝑒−𝑗𝜔𝑡 𝑑𝑡+∞
−∞
1 𝑥(𝑡) di classe 𝐶0
∞= indica l'appartenenza della funzione 𝑥(𝑡) all'insieme delle funzioni sempre derivabili con
continuità.

5
Il segnale 𝑥(𝑡) può essere ricavato dalla sua trasformata attraverso la formula di
antitrasformazione:
𝑥(𝑡) = ∫ 𝑋(𝜔)𝑒𝑗𝜔𝑡𝑑𝜔+∞
−∞
Sia 𝑥 = (𝑥1, 𝑥2, … , 𝑥𝑛) una n-upla di valori reali, si definisce la Trasformata di Fourier
Discreta di 𝑥 la n-upla 𝑋 = (𝑋1, 𝑋2, . . . , 𝑋𝑛) tale che:
𝑋𝑞 = ∑ 𝑥𝑘𝑒−𝑗
2𝜋𝑛
𝑘𝑞 𝑞 = (1,2, . . . , 𝑛)
𝑛
𝑘=1
È definita la formula di antitrasformazione anche a tempo discreto:
𝑥𝑘 =1
𝑛∑ 𝑋𝑞𝑒
𝑗2𝜋𝑛
𝑞𝑘 𝑘 = (1,2, . . . , 𝑛)
𝑛
𝑞=1
Il primo problema riscontrato con la trasformata di Fourier è che la sua applicazione è
possibile soltanto sotto ristrette condizioni, infatti: (1) il sistema deve essere lineare, (2) il
data set deve essere periodico o comunque stazionario, per non perdere il senso fisico della
trasformazione.
Il secondo problema constatato è che la trasformata di Fourier utilizza una
sovrapposizione lineare di funzioni trigonometriche, quindi per simulare dei segnali
deformati, ad esempio per l’occorrenza di un guasto, ha bisogno di aggiungere altre
componenti armoniche (es. Induttore a saturazione).
b) Trasformata Wavelet
Simile alla trasformata di Fourier, rappresenta il segnale come somma di componenti,
servendosi però di una famiglia di funzioni ricavate da una "funzione madre" attraverso
traslazioni e cambiamenti di scala. Le funzioni in questione di solito sono non nulle
soltanto su un insieme compatto di valori, oppure a decadimento rapido. La trasformata è
definita come:
𝑊(𝑎, 𝑏, 𝑥, 𝛾) = |𝑎|−12 ∫ 𝑋(𝑡)𝛾∗(
𝑡−𝑏
𝑎) 𝑑𝑡
+∞
−∞
dove 𝛾∗(∙) è la funzione madre, 𝑎 è il fattore di cambiamento di scala, 𝑏 è la traslazione
dall'origine.

6
c) Wigner - Ville distribution
Per definizione, è la trasformata di Fourier della funzione di autocorrelazione di un
determinato segnale 𝑥(𝑡).
La funzione di autocorrelazione è data da:
𝐶𝑐(𝑡, 𝜏) = 𝑥(𝑡 −1
2𝜏)𝑥∗(𝑡 +
1
2𝜏)
Possiamo quindi definire la distribuzione di Wigner-Ville:
𝑉(𝜔, 𝑡) = ∫ 𝐶𝑐(𝑡, 𝜏)𝑒−𝑗𝜔𝜏
+∞
−∞
𝑑𝜏
Le difficoltà con questo metodo sorgono perché si verifica la presenza di potenza negativa
per alcuni range di frequenze.
In più, applicando comunque una trasformata di Fourier, si è soggetti alle limitazioni
introdotte nel paragrafo precedente.
In questo elaborato si presenta un nuovo metodo di analisi dei dati, basato sulla Empirical
Mode Decomposition (EMD), che ci permetterà di generare un insieme di Intrinsic Mode
Functions (IMFs), a rappresentazione del nostro data set.
7
Capitolo 1: Trasformata Huang - Hilbert
La trasformata di Huang - Hilbert è uno strumento recentemente sviluppato da Norden E.
Huang, utilizzato per l'analisi di segnali non stazionari. Questo capitolo ha come obiettivo
quello di descriverne il funzionamento.
Il metodo è basato sull'Empirical Mode Decomposition (EMD), algoritmo capace di
scomporre un data set in un insieme di Intrinsic Mode Functions (IMF). Per ogni IMF
possiamo definire attraverso la trasformata di Hilbert nuove grandezze: ampiezza e
frequenza istantanee. Il risultato finale sarà una distribuzione chiamata Spettro di Hilbert.
1.1) Ampiezza e Frequenza Istantanee
Nell'analisi tradizionale di Fourier la frequenza è definita come l'inverso del periodo, per
le funzioni seno e coseno che coprono l'intera lunghezza del data set ad ampiezza costante;
il concetto di frequenza in questo caso è semplice e intuitivo.
Se il segnale è non stazionario, aperiodico, si deve approfondire il significato di frequenza,
introducendo una nuova grandezza definita appunto come frequenza istantanea.
Sia 𝑥(𝑡) una funzione di classe 𝐿𝑝2, definiamo la trasformata di Hilbert come:
𝐻[𝑥(𝑡)] = 𝑦(𝑡) =1
𝜋𝑃 ∫
𝑥(𝜏)
𝑡 − 𝜏 𝑑𝜏
+∞
−∞
dove 𝑃 indica il valore principale di Cauchy3 dell'argomento. Con questa definizione 𝑥(𝑡)
e 𝑦(𝑡) formano una coppia rappresentabile nel piano complesso:
𝑧(𝑡) = 𝑥(𝑡) + 𝑗𝑦(𝑡) = 𝑎(𝑡)𝑒𝑗𝜃(𝑡)
dove:
2 Funzione di classe 𝐿𝑝: funzioni facenti parte dello spazio 𝐿𝑝, cioè a p-esima potenza sommabile. 3 Valore principale di Cauchy: metodo per assegnare un valore ad integrali impropri, indefiniti
8
𝑎(𝑡) = √𝑥2(𝑡) + 𝑦2(𝑡) , 𝜃(𝑡) = 𝑎𝑟𝑐𝑡𝑎𝑛(𝑦(𝑡)
𝑥(𝑡))
con 𝑎(𝑡) si indica l'ampiezza istantanea e con 𝜃(𝑡) si indica la fase istantanea (entrambe
dipendenti dal tempo).
Attraverso la trasformata di Hilbert si è in grado di definire in maniera univoca la parte
immaginaria di 𝑧(𝑡) in modo da creare una funziona analitica.
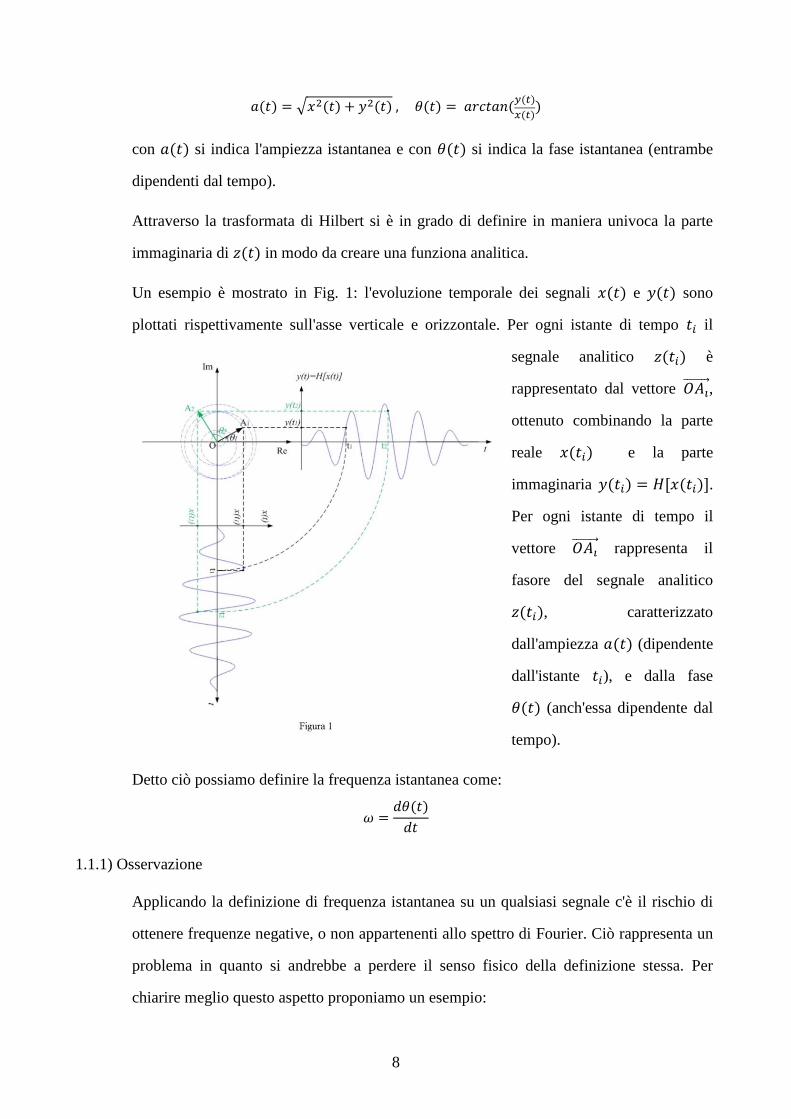
Un esempio è mostrato in Fig. 1: l'evoluzione temporale dei segnali 𝑥(𝑡) e 𝑦(𝑡) sono
plottati rispettivamente sull'asse verticale e orizzontale. Per ogni istante di tempo 𝑡𝑖 il
segnale analitico 𝑧(𝑡𝑖) è
rappresentato dal vettore 𝑂𝐴𝑖⃗⃗ ⃗⃗ ⃗⃗ ⃗,
ottenuto combinando la parte
reale 𝑥(𝑡𝑖) e la parte
immaginaria 𝑦(𝑡𝑖) = 𝐻[𝑥(𝑡𝑖)].
Per ogni istante di tempo il
vettore 𝑂𝐴𝑖⃗⃗ ⃗⃗ ⃗⃗ ⃗ rappresenta il
fasore del segnale analitico
𝑧(𝑡𝑖), caratterizzato
dall'ampiezza 𝑎(𝑡) (dipendente
dall'istante 𝑡𝑖), e dalla fase
𝜃(𝑡) (anch'essa dipendente dal
tempo).
Detto ciò possiamo definire la frequenza istantanea come:
𝜔 =𝑑𝜃(𝑡)
𝑑𝑡
1.1.1) Osservazione
Applicando la definizione di frequenza istantanea su un qualsiasi segnale c'è il rischio di
ottenere frequenze negative, o non appartenenti allo spettro di Fourier. Ciò rappresenta un
problema in quanto si andrebbe a perdere il senso fisico della definizione stessa. Per
chiarire meglio questo aspetto proponiamo un esempio:
9
sia 𝑥(𝑡) = 𝑎(𝑡)𝑐𝑜𝑠(𝜃(𝑡)), allora 𝑦(𝑡) = 𝐻[𝑥(𝑡)] = 𝑎(𝑡)𝑠𝑒𝑛(𝜃(𝑡)), ottenuto
trasformando il segnale 𝑥(𝑡) secondo Fourier, ponendo lo spettro 𝑋(𝜔) in ingresso al
filtro detto di Hilbert, che darà in uscita �̃�(𝜔) il quale antitrasformato restituirà 𝑦(𝑡), detto
anche quadratura di 𝑥(𝑡).
Quindi possiamo definire:
𝑧(𝑡) = 𝑎(𝑡)𝑐𝑜𝑠(𝜃(𝑡)) + 𝑗𝑎(𝑡)𝑠𝑒𝑛(𝜃(𝑡))
Essendo 𝑠𝑒𝑛(𝜃(𝑡)) = 𝐻[𝑐𝑜𝑠(𝜃(𝑡))], riscriviamo
𝑧(𝑡) = 𝑎(𝑡)𝑐𝑜𝑠(𝜃(𝑡)) + 𝑗𝑎(𝑡)𝐻[𝑐𝑜𝑠(𝜃(𝑡))]
Ma allo stesso tempo la trasformata di Hilbert di 𝑥(𝑡) è uguale a 𝑦(𝑡), di conseguenza
possiamo scrivere che:
𝑧(𝑡) = 𝑎(𝑡)𝑐𝑜𝑠(𝜃(𝑡)) + 𝑗𝐻[𝑎(𝑡)𝑐𝑜𝑠(𝜃(𝑡))]
Combinando le 2 precedenti equazioni si ottiene una condizione da soddisfare:
𝐻[𝑎(𝑡)𝑐𝑜𝑠(𝜃(𝑡))] = 𝑎(𝑡)𝐻[𝑐𝑜𝑠(𝜃(𝑡))]
Si dimostra che la condizione appena trovata è soddisfatta se 𝑥(𝑡) assolve le condizioni
Bedrosiane: (1) lo spettro di 𝑎(𝑡) deve essere a frequenze minori rispetto allo spettro di
𝜃(𝑡); (2) i due spettri non devono sovrapporsi; (3) la componente DC del segnale 𝑥(𝑡)
deve essere 0.
Se gli spettri di ampiezza e fase (𝑎(𝑡) e 𝜃(𝑡)) non sono chiaramente separati, la parte
immaginaria non è la quadratura di 𝑥(𝑡). Ciò è dovuto alla contaminazione nella
modulazione di fase e ampiezza, il risultato non avrà alcun senso fisico.
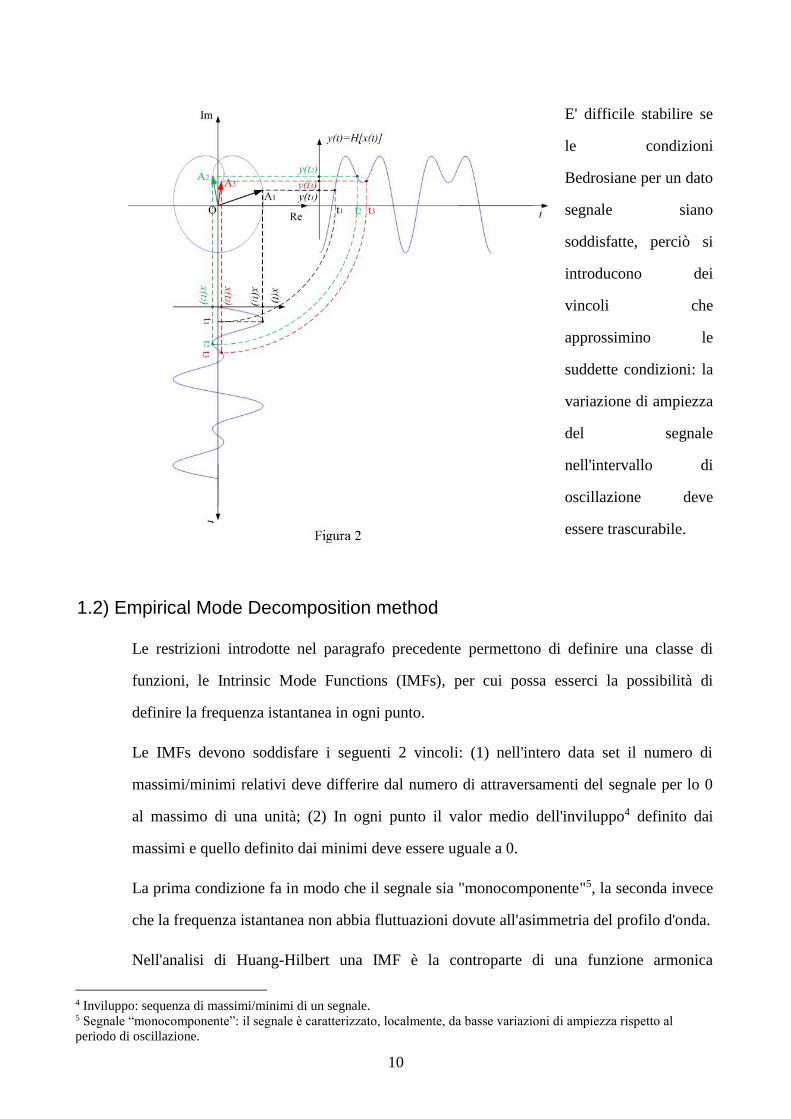
Il segnale analitico 𝑧(𝑡) deve essere sempre caratterizzato da piccole variazioni in
ampiezza, e grandi variazioni di fase.
Per chiarire questo aspetto si mostra un esempio in Fig. 2 nel quale si nota in 𝑥(𝑡) una
variazione veloce dell'ampiezza, facendo in modo che 𝑦(𝑡) non sia la quadratura di 𝑥(𝑡).
Come conseguenza l'evoluzione di 𝑦(𝑡) distorce il fasore risultante con una rotazione in
senso orario da 𝐴2 a 𝐴3.
In quella zona la frequenza istantanea, trovata come la derivata della fase, è negativa (non
ha senso).
10
E' difficile stabilire se
le condizioni
Bedrosiane per un dato
segnale siano
soddisfatte, perciò si
introducono dei
vincoli che
approssimino le
suddette condizioni: la
variazione di ampiezza
del segnale
nell'intervallo di
oscillazione deve
essere trascurabile.
1.2) Empirical Mode Decomposition method
Le restrizioni introdotte nel paragrafo precedente permettono di definire una classe di
funzioni, le Intrinsic Mode Functions (IMFs), per cui possa esserci la possibilità di
definire la frequenza istantanea in ogni punto.
Le IMFs devono soddisfare i seguenti 2 vincoli: (1) nell'intero data set il numero di
massimi/minimi relativi deve differire dal numero di attraversamenti del segnale per lo 0
al massimo di una unità; (2) In ogni punto il valor medio dell'inviluppo4 definito dai
massimi e quello definito dai minimi deve essere uguale a 0.
La prima condizione fa in modo che il segnale sia "monocomponente"5, la seconda invece
che la frequenza istantanea non abbia fluttuazioni dovute all'asimmetria del profilo d'onda.
Nell'analisi di Huang-Hilbert una IMF è la controparte di una funzione armonica
4 Inviluppo: sequenza di massimi/minimi di un segnale. 5 Segnale “monocomponente”: il segnale è caratterizzato, localmente, da basse variazioni di ampiezza rispetto al
periodo di oscillazione.
11
nell'analisi di Fourier, con il vantaggio di avere una frequenza ed una ampiezza variabili,
cioè a tutti gli effetti il segnale viene approssimato come somma di segnali non stazionari.
L'Empirical Mode Decomposition (EMD) è il processo con il quale si scompone il segnale
di interesse in una somma di IMFs.
Sia 𝑥(𝑡) un segnale avente almeno un massimo e un minimo. Prima di tutto si trovano i
punti di massimo e di minimo; i punti di estremanti di ogni tipo si collegano tra di loro
attraverso l'uso di una spline cubica, ottenendo gli inviluppi superiori e inferiori.
Definiamo 𝑚1 la media punto per punto dei 2 inviluppi. Si valuta la differenza tra il
segnale e 𝑚1.
ℎ1(𝑡) = 𝑥(𝑡) − 𝑚1
In teoria, ℎ1 dovrebbe essere una IMF, infatti le metodologie utilizzate per la sua
costruzione sembrano fare in modo che i vincoli imposti nel paragrafo precedente siano
soddisfatti. In realtà ciò non è affatto garantito, vista la non-rigorosità matematica del
metodo di creazione.
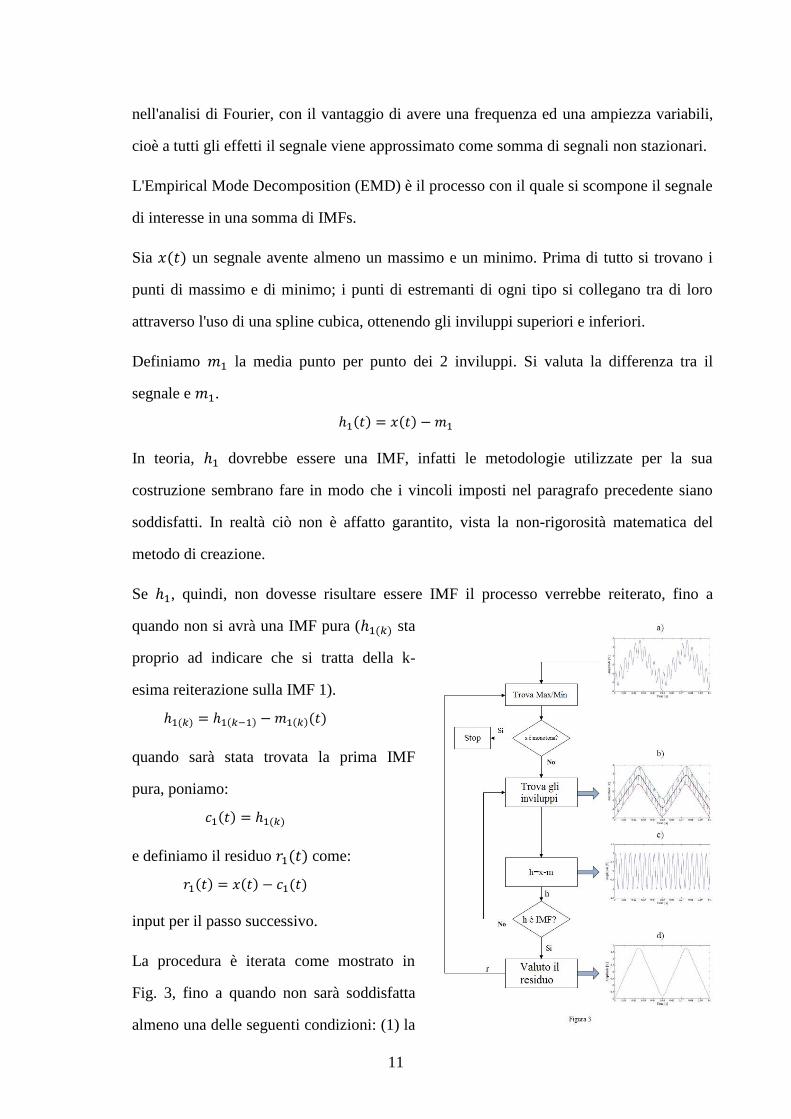
Se ℎ1, quindi, non dovesse risultare essere IMF il processo verrebbe reiterato, fino a
quando non si avrà una IMF pura (ℎ1(𝑘) sta
proprio ad indicare che si tratta della k-
esima reiterazione sulla IMF 1).
ℎ1(𝑘) = ℎ1(𝑘−1) − 𝑚1(𝑘)(𝑡)
quando sarà stata trovata la prima IMF
pura, poniamo:
𝑐1(𝑡) = ℎ1(𝑘)
e definiamo il residuo 𝑟1(𝑡) come:
𝑟1(𝑡) = 𝑥(𝑡) − 𝑐1(𝑡)
input per il passo successivo.
La procedura è iterata come mostrato in
Fig. 3, fino a quando non sarà soddisfatta
almeno una delle seguenti condizioni: (1) la
12
componente 𝑐𝑛(𝑡), oppure il residuo 𝑟𝑛(𝑡) diventano più piccole di una quantità definita
precedentemente; (2) il residuo 𝑟𝑛(𝑡) diventa una funzione monotona, cioè senza massimi
o minimi.
Si otterranno, quindi n residui tali che:
𝑟𝑛(𝑡) = 𝑟𝑛−1(𝑡) − 𝑐𝑛(𝑡)
Dopo l'applicazione dell'algoritmo EMD il segnale di ingresso sarà espresso come somma
di 𝑛 IMFs più un residuo:
𝑥(𝑡) = ∑𝑐𝑗(𝑡) + 𝑟𝑛(𝑡)
𝑛
𝑗=1
Il procedimento descritto fa in modo che vengano eliminate le onde sovraimposte, quindi
reso il profilo d'onda più simmetrico.
Se si rende il profilo d'onda "troppo simmetrico" si potrebbe creare una IMF di ampiezza
quasi costante, eliminando anche fluttuazioni significative.
Per evitare ciò, Huang propone una limitazione da imporre sulla deviazione standard tra 2
risultati consecutivi (𝑆𝐷). Il processo si ferma se:
𝑆𝐷 = ∫ℎ1(𝑘)
2 (𝑡) − ℎ1(𝑘−1)2 (𝑡)
ℎ1(𝑘−1)2 (𝑡)
𝑑𝑡 < 𝜀𝑇
Dove 𝑇 è la finestra di osservazione ed 𝜀 è un valore adimensionale circa uguale a 0,2 o
0,3.
1.3) Lo spettro di Hilbert
Ogni IMFs è trasformata secondo Hilbert ed è ottenuto un segnale analitico espresso in
coordinate polari. Possiamo riscrivere 𝑥(𝑡) come:
𝑥(𝑡) = ∑ 𝑎𝑘(𝑡)𝑒𝑗𝜃𝑘(𝑡)
𝑛
𝑘=1
= ∑ 𝑎𝑘(𝑡)𝑒𝑗 ∫ 𝜔𝑘(𝑡)
𝑇
𝑛
𝑘=1
Comparando l'ultima equazione con l'equazione della trasformata di Fourier a tempo
discreto:
𝑥(𝑡) = ∑ 𝑎𝑘𝑒𝑗𝜔𝑘𝑡+𝜑𝑘
𝑛
𝑘=1
13
Si osserva che la HHT non è niente altro che una generalizzazione della trasformata di
Fourier per segnali non stazionari, che offre la possibilità di decomporre un segnale
caratterizzato con ampiezza e fase variabili nel tempo.
Definiamo anche lo spettro marginale ℎ(𝜔) come:
ℎ(𝜔) = ∫ 𝐻(𝜔, 𝑡)𝑑𝑡𝑇
0
che ci offre una misura del contributo all'energia totale di ogni frequenza. Rappresenta in
senso probabilistico l'energia accumulata lungo tutto il data set.
14
Capitolo 2: Ensemble Empirical Mode Decomposition
L'algoritmo EMD, descritto nel capitolo precedente, risulta essere utilizzabile in molte
applicazioni per rappresentare segnali generati attraverso processi non lineari e segnali non
stazionari affetti da rumore. L' EMD ha il vantaggio di non richiedere alcun pre o post
processo, ciò nonostante sono emerse delle problematiche nella sua applicazione.
L'algoritmo EMD soffre di un problema chiamato mode mixing, per risolverlo è stato
introdotto un nuovo metodo di analisi, l'Ensemble EMD (EEMD). In questo capitolo sarà
espletato il suo funzionamento e la sua applicazione.
L'EEMD è un metodo di analisi in cui si aggiungono al segnale svariate quantità di rumore
bianco, mediato.
2.1) Problema del Mode Mixing
Quando un segnale contiene intermittenze, l'algoritmo EMD incontra la problematica del
mode mixing, i suoi effetti, di solito, sono: (1) restituire una o più IMF che contengono
segnali a bande ampiamente diverse; (2) restituire segnali della stessa banda contenuti in
IMFs diverse.
La presenza di intermittenze nel segnale, oltre a causare l'aliasing nella rappresentazione
tempo-frequenza del segnale stesso, introduce la possibilità che una singola IMF perda
totalmente senso fisico, come sarà mostrato nell'esempio in seguito.
Per risolvere il problema del mode mixing, Huang ha introdotto il Test di Intermittenza,
che migliora le prestazioni dell'EMD. Tuttavia, l'utilizzo di questa tecnica introduce altre
problematiche non facilmente risolvibili, per esempio si introduce un vincolo sul rapporto
segnale-rumore.
15
2.2) Ensemble EMD
E' definito come un metodo NADA (noise assisted data analysis) ed è basato sulle scoperte
di recenti studi in riferimento alle proprietà statistiche del rumore bianco, si dimostra
infatti che con l'aggiunta di rumore bianco l'algoritmo EMD ha efficienza maggiore.
Per capire il funzionamento e le metodologie di applicazione dell'EEMD è importante
introdurre qualche definizione:
Rumore bianco: tipo di rumore caratterizzato da ampiezza costante su tutto lo
spettro, a media nulla e a correlazione sferica.
Filter bank accoppiato: collezione di filtri passa-banda, a banda passante costante.
La proprietà che li contraddistingue è che il range di frequenze dei filtri può essere
sovrapposto. Per esempio, un semplice filter bank accoppiato include filtri che
coprono le frequenze da 50 a 120 Hz, da 100 a 240 Hz, da 200 a 480 Hz.
Il principio dell'EEMD è semplice: si aggiunge rumore bianco ad ampiezza finita, che va a
popolare l'intero spazio tempo-frequenza uniformemente, a cui sarà sommato il segnale di
interesse e applicato l’algoritmo EMD.
Studi recenti (Flandrin 2004 e Wu e Wang 2004) dimostrano che applicando l’EMD ad
una distribuzione di rumore bianco si ottiene lo stesso risultato che si otterrebbe con un
filter bank accoppiato.
Quando il segnale è sommato a questa distribuzione uniforme di base, i suoi valori di
diverse bande saranno proiettati automaticamente nella giusta banda di riferimento
stabilita dal rumore bianco in background.
L'algoritmo che implementa l'EEMD è il seguente:
1. Aggiungere rumore bianco ai dati.
2. Decomporre il data set con il rumore aggiunto, in IMFs.
3. Reiterare i passi 1 e 2 con rumore bianco di ampiezza diversa per un numero di
volte sufficiente a garantire il funzionamento dell'algoritmo.

16
4. Elaborare il risultato finale, cioè creare un insieme di IMFs.
Nell'EEMD l'aggiunta di rumore bianco fa in modo che si elimini ogni altro tipo di
disturbo, quindi oltre a risolvere il problema del mode mixing, si elimina anche il rumore
introdotto dalla misurazione.
Altra nota positiva è il comportamento dell’algoritmo nei punti iniziali e finali del data set,
le spline saranno più controllate e si ridurrà l’errore. Si riscontrava infatti, soprattutto con
l'utilizzo dell'EMD classico, un malfunzionamento proprio attorno ai punti iniziali e finali,
cioè prima del primo massimo/minimo e dopo l'ultimo massimo/minimo del data set.
L'effetto del rumore bianco aggiunto decresce secondo le regole empiriche:
𝜀𝑛 =𝜀
√𝐼; 𝑙𝑛 (𝜀𝑛) +
𝜀
2𝑙𝑛 (𝐼) = 0
Dove si indicano con 𝐼 il numero di ensemble members (numero di volte che si inserisce
rumore bianco, parametro arbitrario), con 𝜀 l'ampiezza del rumore bianco aggiunto e con
𝜀𝑛 la varianza finale dell'errore, ricavata dalla differenza tra il segnale di ingresso e le
corrispondenti IMFs.
Per una maggior comprensione, descriviamo in maniera analitica l'algoritmo EEMD:
1. Inizializzare il numero di ensemble members 𝐼.
2. Generare 𝑥𝑖(𝑡) = 𝑥(𝑡) + 𝑤𝑖(𝑡) con con 𝑖 = [1,… , 𝐼], dove 𝑥𝑖(𝑡) è la
realizzazione del segnale più una componente del rumore bianco.
3. Ogni 𝑥𝑖(𝑡) verrà decomposto con l'algoritmo EMD, ottenendo delle IMFs ℎ𝑘𝑖 (𝑡)
con 𝑘 = [1,… , 𝐾] (K=numero di IMF trovate).
4. Calcolare la media, per ogni IMF, delle ℎ𝑘𝑖 (𝑡), ottenendo ℎ𝑘(𝑡)̃ =
1
𝐼∑ ℎ𝑘
𝑖 (𝑡) 𝐼𝑖=1
5. Il segnale 𝑥(𝑡) può quindi essere riscritto come:
𝑥(𝑡) = ∑ ℎ𝑘(𝑡)̃ + 𝑟(𝑡)
𝐾
𝑘=1
Dove con 𝑟(𝑡) si indica il residuo, come nell'algoritmo EMD classico.
Il metodo dell'EEMD può, quindi, separare il segnale in base alla banda, senza incappare
17
nel problema del mode mixing.
Al momento l'EEMD sicuramente rappresenta una soluzione migliore rispetto al classico
algoritmo EMD. Eliminando il problema del mode mixing, è in grado di produrre un set di
IMFs aventi un pieno significato fisico e una distribuzione tempo-frequenza senza errori
(come vedremo nell’esempio successivo).
Insieme alle grandi innovazioni, l'EEMD porta con sé dei problemi. Il primo di questi è
quello del drowback: l'algoritmo produce dei risultati che non soddisfano sempre le
condizioni della definizione di IMF, infatti ogni prova dell'ensemble produce delle IMF
che saranno sommate, ma la somma di più IMFs non è necessariamente una IMF.
Il secondo problema sorge sul come trattare le distribuzioni "multi-modi"6 delle IMFs,
infatti la discrepanza tra una prova e il suo riferimento tende a mostrare una distribuzione
bi-modale. Ogni volta che si crea una distribuzione bi-modale i valori della discrepanza
diventano sempre più ampi e il valore della varianza di errore non seguirà più la formula
introdotta precedentemente.
Altri due problemi trovati sono i criteri di stop e gli effetti finali, che nonostante migliorie
rispetto all'EMD classico non sono stati del tutto risolti.
I problemi riportati sono tuttora insoluti, ciò indica che è necessario un importante studio
sull'argomento.
2.3) Esempio di applicazione
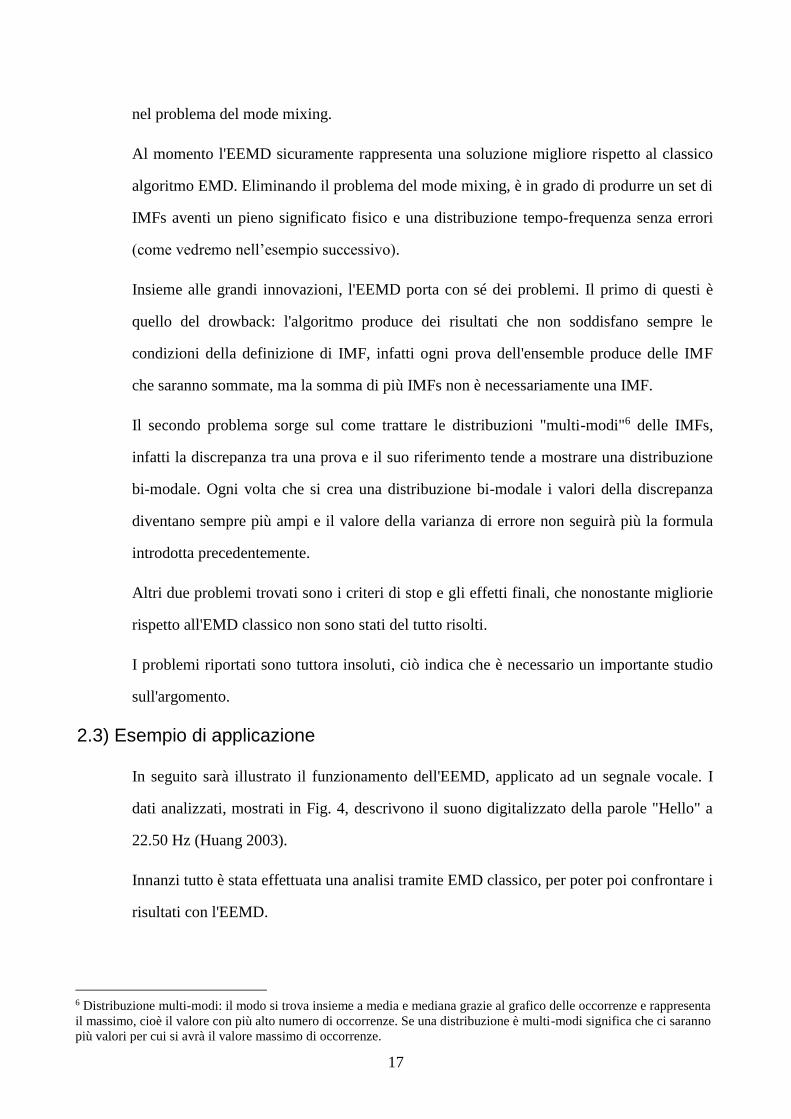
In seguito sarà illustrato il funzionamento dell'EEMD, applicato ad un segnale vocale. I
dati analizzati, mostrati in Fig. 4, descrivono il suono digitalizzato della parole "Hello" a
22.50 Hz (Huang 2003).
Innanzi tutto è stata effettuata una analisi tramite EMD classico, per poter poi confrontare i
risultati con l'EEMD.
6 Distribuzione multi-modi: il modo si trova insieme a media e mediana grazie al grafico delle occorrenze e rappresenta
il massimo, cioè il valore con più alto numero di occorrenze. Se una distribuzione è multi-modi significa che ci saranno
più valori per cui si avrà il valore massimo di occorrenze.
18
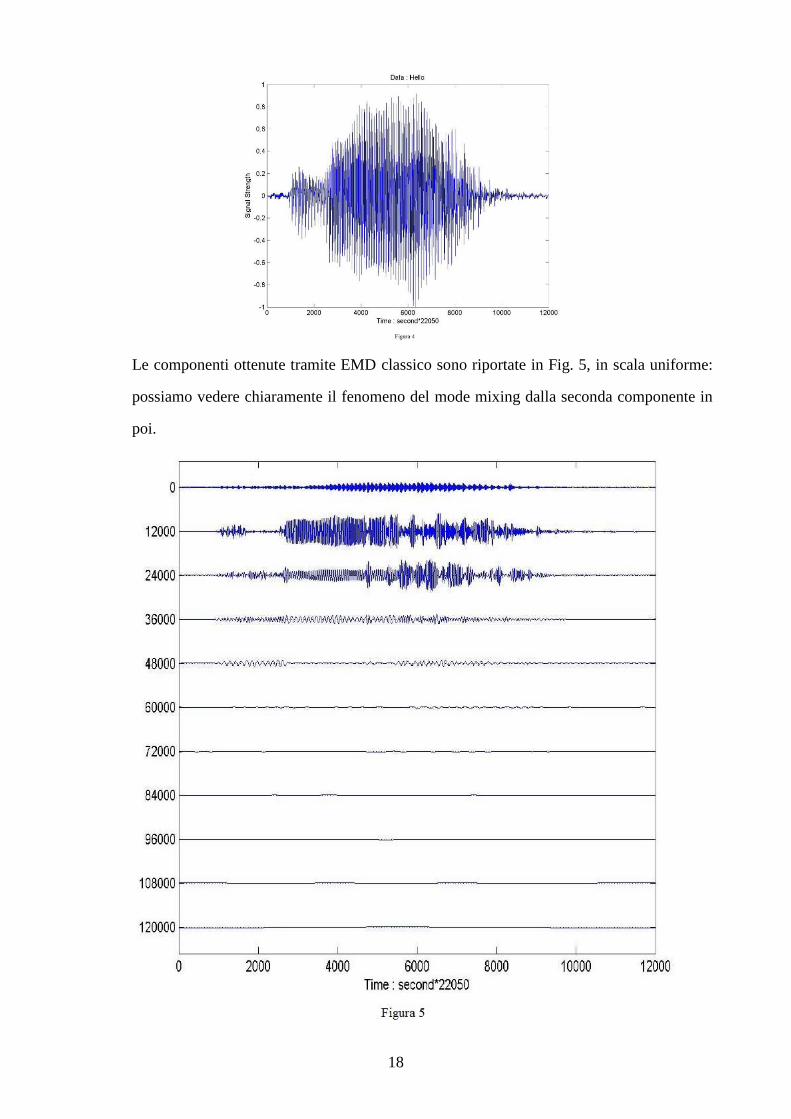
Le componenti ottenute tramite EMD classico sono riportate in Fig. 5, in scala uniforme:
possiamo vedere chiaramente il fenomeno del mode mixing dalla seconda componente in
poi.
19
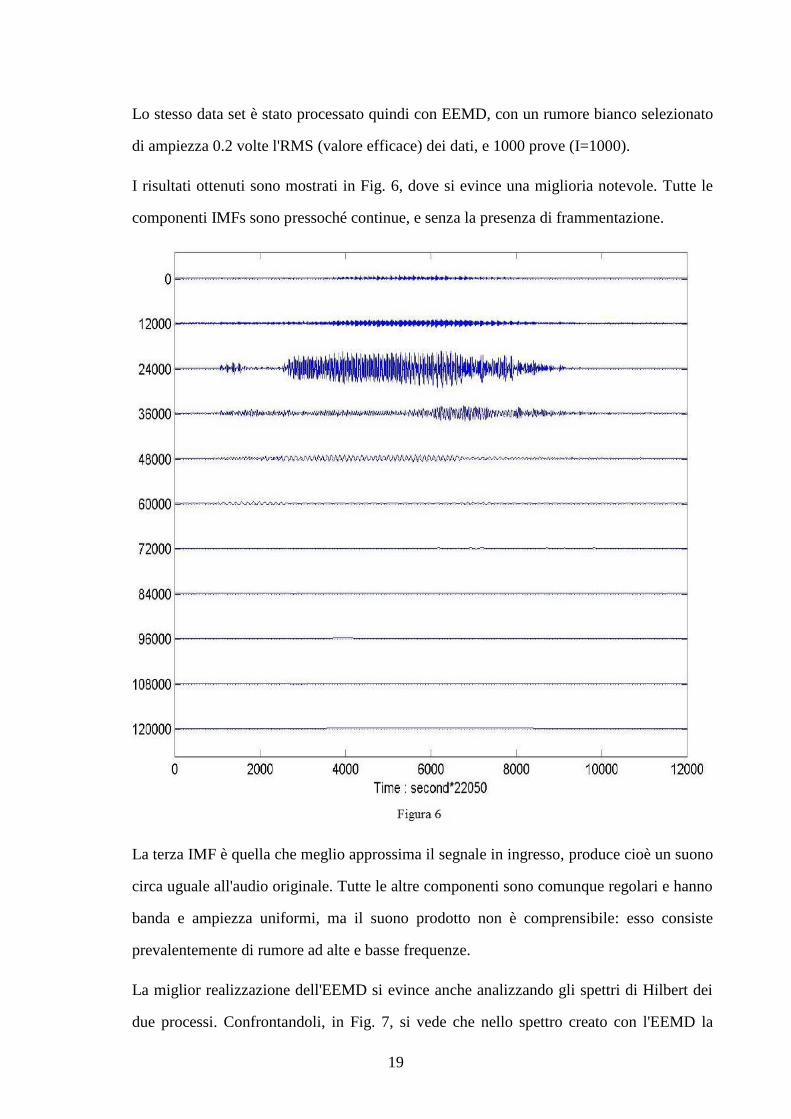
Lo stesso data set è stato processato quindi con EEMD, con un rumore bianco selezionato
di ampiezza 0.2 volte l'RMS (valore efficace) dei dati, e 1000 prove (I=1000).
I risultati ottenuti sono mostrati in Fig. 6, dove si evince una miglioria notevole. Tutte le
componenti IMFs sono pressoché continue, e senza la presenza di frammentazione.
La terza IMF è quella che meglio approssima il segnale in ingresso, produce cioè un suono
circa uguale all'audio originale. Tutte le altre componenti sono comunque regolari e hanno
banda e ampiezza uniformi, ma il suono prodotto non è comprensibile: esso consiste
prevalentemente di rumore ad alte e basse frequenze.
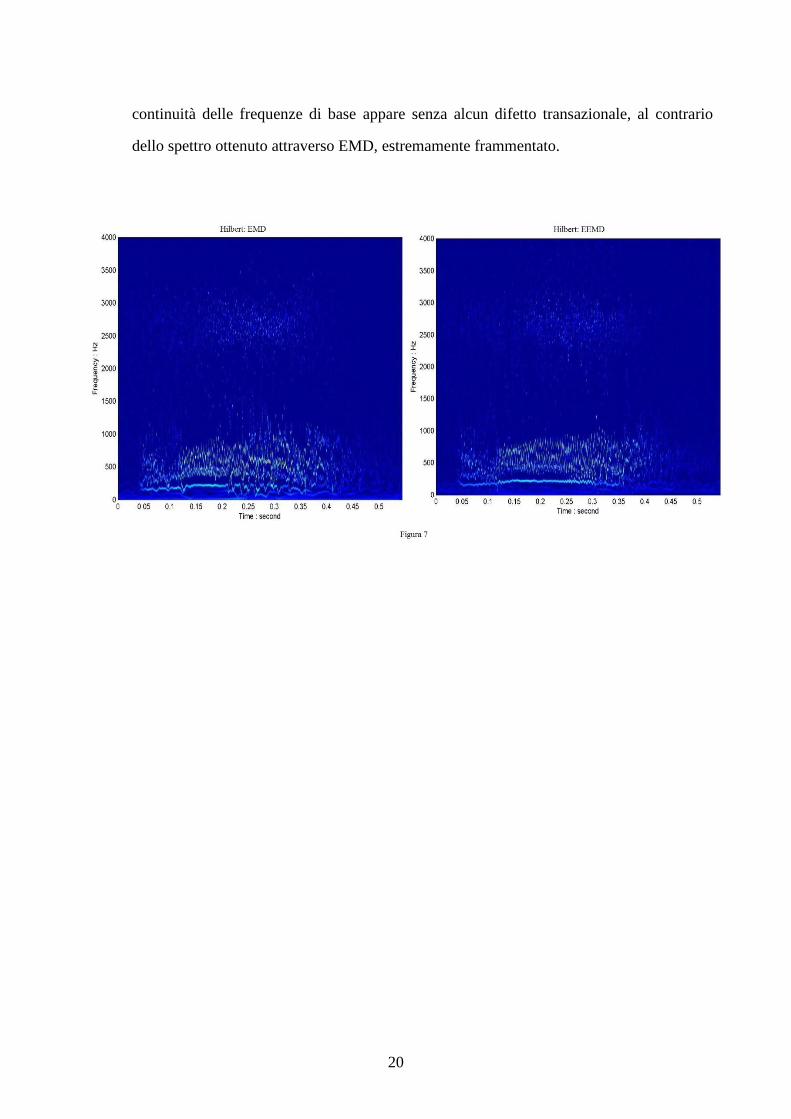
La miglior realizzazione dell'EEMD si evince anche analizzando gli spettri di Hilbert dei
due processi. Confrontandoli, in Fig. 7, si vede che nello spettro creato con l'EEMD la
20
continuità delle frequenze di base appare senza alcun difetto transazionale, al contrario
dello spettro ottenuto attraverso EMD, estremamente frammentato.
21
Capitolo 3: Rilevazione dei guasti in una rete di potenza
La rilevazione dei guasti nelle reti elettriche di potenza è sempre più importante dopo la
deregolamentazione del mercato dell'elettricità ed il drastico incremento della sua
domanda.
Storicamente per l'analisi e la detection dei guasti sono state utilizzate varie soluzioni. Dal
punto di vista matematico, inizialmente, l'idea era di disaccoppiare le quantità misurate nel
sistema di potenza (tensioni e correnti di un sistema tri-fase) e poi effettuare misurazioni.
In questo modo, però, informazioni e parte della potenza del sistema si perdevano.
Questo capitolo mostrerà un metodo innovativo per rilevare dei guasti in un sistema di
potenza applicando il metodo del fasore dello spazio complesso insieme alla trasformata
di Huang-Hilbert.
3.1) Fasore dello spazio complesso
Un sistema tri-fase è un insieme di f.e.m. della stessa ampiezza ed equisfasate tra loro. Il
fasore dello spazio complesso (o vettore spaziale), 𝑓𝑃 = 𝑓𝛼 + 𝑗𝑓𝛽, di un sistema trifase
𝑓𝑅 , 𝑓𝑆, 𝑓𝑇 è dato da:
Che descrive tutte le componenti armoniche e non armoniche del sistema. In questa
maniera non c'è nessuna perdita di informazione.
Il segnale risultante dopo l'applicazione del metodo del fasore dello spazio complesso sarà
22
poi processato con la trasformata di Huang – Hilbert.
3.2) Calcolo della posizione dell'errore con HHT
Quando si verifica un guasto elettrico in un sistema di potenza, viene generato un segnale
transitorio non lineare, che viaggia attraverso la linea di trasmissione danneggiata fino ad
entrambe le estremità, dove si trovano i busbars7. Praticamente si vedono dei disturbi sul
fasore. L'onda generata contiene informazioni sulla natura del guasto.
Inizialmente l'onda generata dal guasto, ha uno spettro largo, con la componente DC ad
alte frequenze. Quando arriverà al busbar potranno riscontrarsi dei cambiamenti nell’onda
stessa (di solito si verificano al momento di arrivo, allo strumento di misura, del rumore
generato dal guasto).
Come risultato del reciproco accoppiamento tra le linee di trasmissione adiacenti (o dei
cavi sotterranei), l'ampiezza dell’onda generata dall'errore potrebbe essere amplificata,
creando problemi nella detection del guasto. Storicamente il problema dell’accoppiamento
è stato parzialmente risolto con l’applicazione delle trasformate di Karrembauer e Clark.
Queste trasformazioni disaccoppiano le tensioni (o correnti) misurate del sistema trifase
(creando 3 modi), prima dell’analisi con la Wavelet, FFT o HHT.
L’applicazione delle trasformate di Clark e Karrembauer, prima dell'applicazione della
trasformata di Huang Hilbert, fa in modo che l’analisi sia possibile, ma nel contempo ci fa
perdere delle informazioni riguardo al guasto. Infatti la HHT verrebbe applicata solo ad
uno dei 3 modi creati (line-line mode per la trasformata di Karrembauer e ground-mode
per la trasformata di Clark).
E’ proprio per non perdere informazioni sul guasto che si utilizza il metodo del fasore
dello spazio complesso come metodo di preprocesso. In questa maniera tutte e 3 le
quantità misurate sono combinate in un segnale unidimensionale proprio nello spazio
complesso, sul quale sarà applicato l'algoritmo EMD che permetterà di ricavare una serie
di IMFs. Si dimostra che le informazioni più importanti per la detection dei guasti si
trovano nella prima IMF, perciò si lavorerà prevalentemente sulla IMF1, dopo averla
7 Busbar: Placca costituita di materiale conduttore, posto alle estremità di una linea di connessione.
23
calcolata.
L'uso, nella fase di preprocesso, del metodo del fasore dello spazio complesso, restituisce
risultati più accurati nell’ambito della rilevazione di guasti, rispetto ad altre metodologie,
infatti un altro pregio di questo metodo è che nel risultato (che sarà l'input della HHT)
sono comprese componenti su tutto lo spettro.
Supponiamo per semplicità che ci sia sincronizzazione dei tempi tra le 2 stazioni alle
estremità del collegamento in cui si verifica il guasto.
Entrambi gli strumenti di misura (uno per ogni stazione), riescono a misurare il momento
in cui l’onda generata dal guasto arriva.
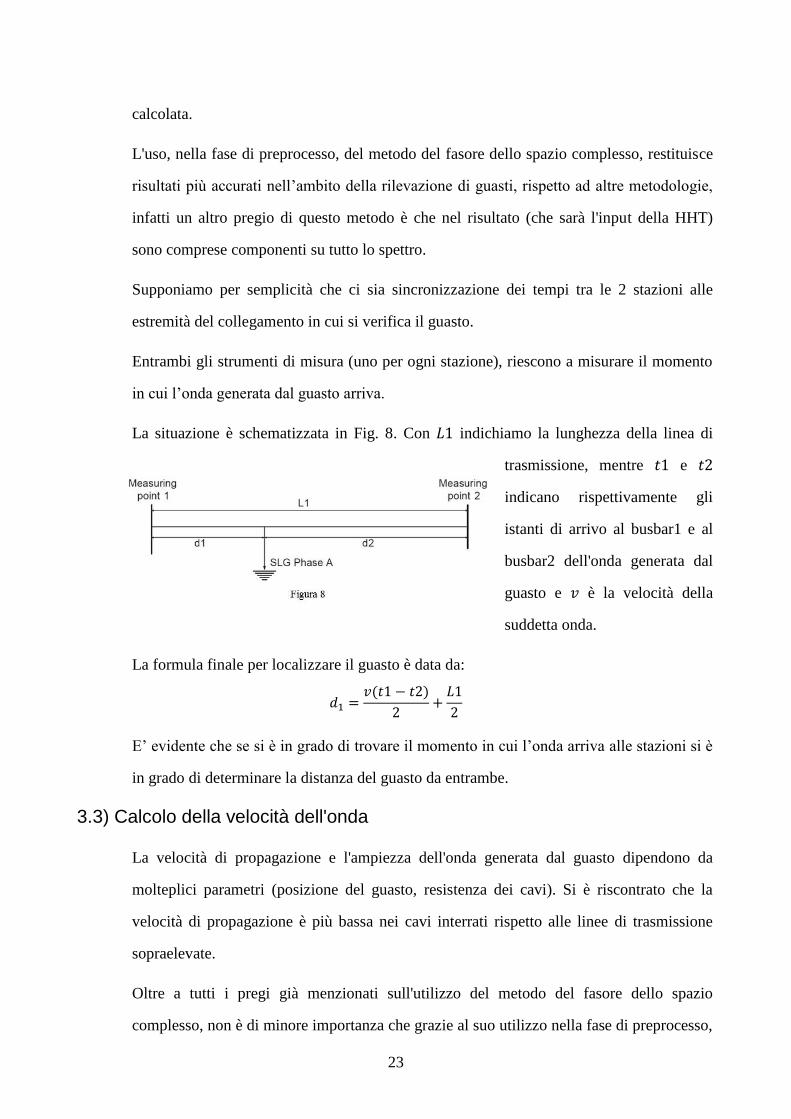
La situazione è schematizzata in Fig. 8. Con 𝐿1 indichiamo la lunghezza della linea di
trasmissione, mentre 𝑡1 e 𝑡2
indicano rispettivamente gli
istanti di arrivo al busbar1 e al
busbar2 dell'onda generata dal
guasto e 𝑣 è la velocità della
suddetta onda.
La formula finale per localizzare il guasto è data da:
𝑑1 =𝑣(𝑡1 − 𝑡2)
2+
𝐿1
2
E’ evidente che se si è in grado di trovare il momento in cui l’onda arriva alle stazioni si è
in grado di determinare la distanza del guasto da entrambe.
3.3) Calcolo della velocità dell'onda
La velocità di propagazione e l'ampiezza dell'onda generata dal guasto dipendono da
molteplici parametri (posizione del guasto, resistenza dei cavi). Si è riscontrato che la
velocità di propagazione è più bassa nei cavi interrati rispetto alle linee di trasmissione
sopraelevate.
Oltre a tutti i pregi già menzionati sull'utilizzo del metodo del fasore dello spazio
complesso, non è di minore importanza che grazie al suo utilizzo nella fase di preprocesso,
24
si riesca a trovare la velocità dell'onda generata dal guasto tramite una semplice
equazione:
𝑣 =2 ∙ 𝑙𝑙𝑖𝑛𝑒
∆𝑡
Se si utilizzassero altri metodi, come le trasformate di Karrembauer e Clarke, si dovrebbe
ricorrere a metodologie molto più complicate per trovare la velocità dell'onda.
Nella formula che sarà utilizzata sono indicati con 𝑙𝑙𝑖𝑛𝑒 la lunghezza della linea di
connessione e con ∆𝑡 il tempo tra due picchi della forma d'onda misurata dagli strumenti
di misura.
Esistono vari metodi, sui quali ancora si conducono studi, per la determinazione dei picchi
della forma d'onda e dei tempi a loro corrispondenti.
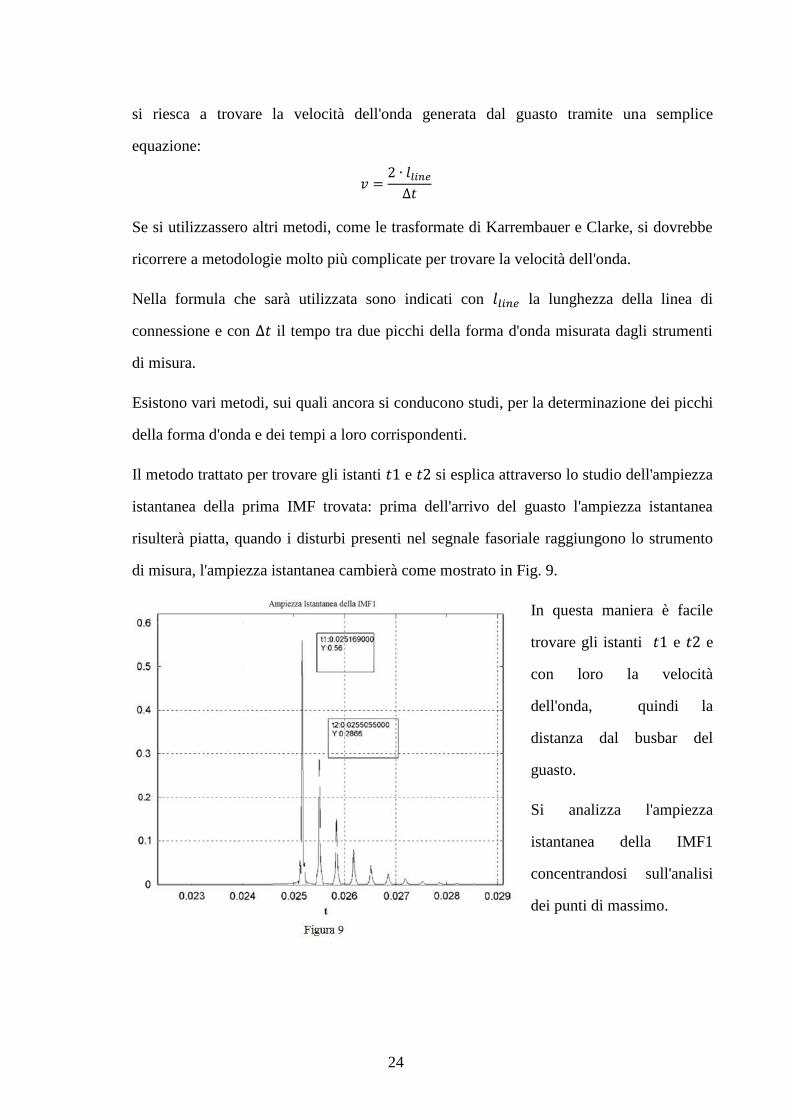
Il metodo trattato per trovare gli istanti 𝑡1 e 𝑡2 si esplica attraverso lo studio dell'ampiezza
istantanea della prima IMF trovata: prima dell'arrivo del guasto l'ampiezza istantanea
risulterà piatta, quando i disturbi presenti nel segnale fasoriale raggiungono lo strumento
di misura, l'ampiezza istantanea cambierà come mostrato in Fig. 9.
In questa maniera è facile
trovare gli istanti 𝑡1 e 𝑡2 e
con loro la velocità
dell'onda, quindi la
distanza dal busbar del
guasto.
Si analizza l'ampiezza
istantanea della IMF1
concentrandosi sull'analisi
dei punti di massimo.
25
3.4) Esempio di applicazione
Si mostra, per facilitare la comprensione del metodo espletato, un esempio di applicazione
della HHT per un guasto in un impianto che utilizza cavi sotterranei.
L'esempio illustrato è uno dei problemi che si presenta con maggiore frequenza. Quando
l'onda generata dal guasto arriverà agli strumenti di misura, la forma d'onda del fasore
dello spazio complesso sarà processata con l'algoritmo EMD e sarà trovata la IMF1. Come
anticipato, gli elementi di interesse dell'onda del guasto sono contenuti nella IMF1, che
analizzeremo in dettaglio.
Selezionata la IMF1, attraverso la trasformata di Hilbert saranno trovate ampiezza e
frequenza istantanee e, attraverso le 2 grandezze sarà localizzato il guasto e calcolata la
velocità dell'onda.
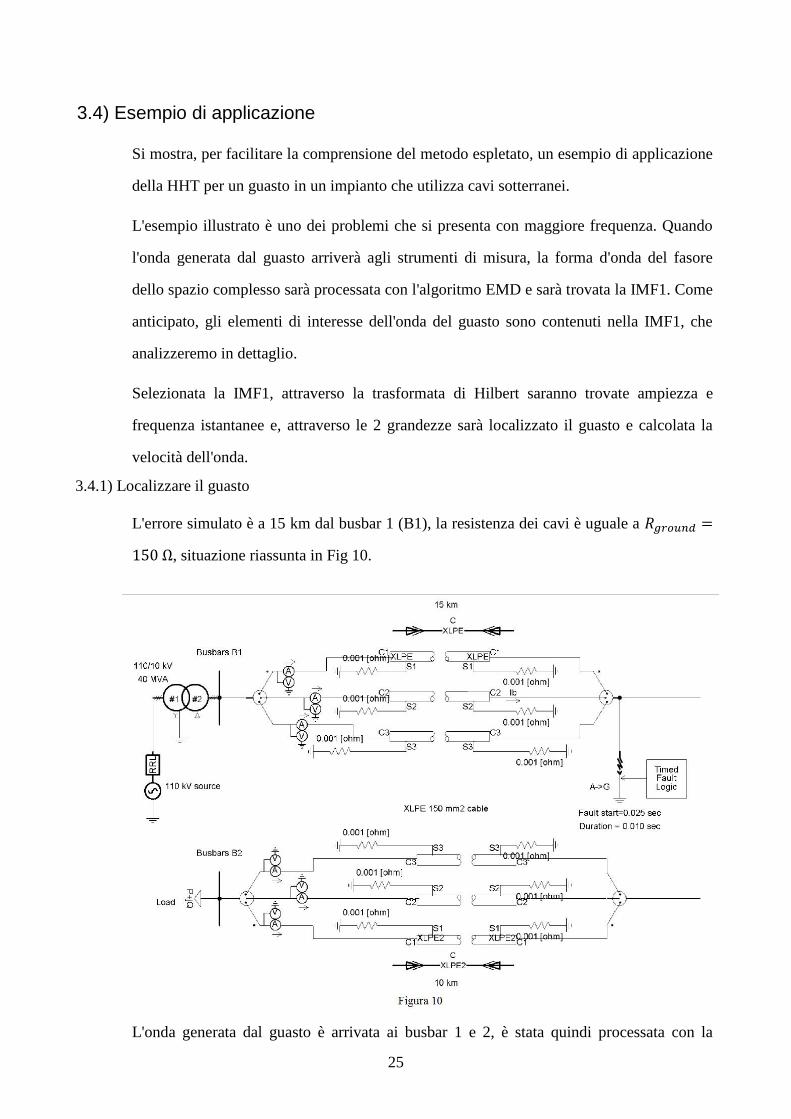
3.4.1) Localizzare il guasto
L'errore simulato è a 15 km dal busbar 1 (B1), la resistenza dei cavi è uguale a 𝑅𝑔𝑟𝑜𝑢𝑛𝑑 =
150 Ω, situazione riassunta in Fig 10.
L'onda generata dal guasto è arrivata ai busbar 1 e 2, è stata quindi processata con la

26
trasformata di Huang Hilbert e trovata la IMF1. Le figure 11 e 12 rappresentano
l'ampiezza istantanea dell'onda registrata degli strumenti di misura in prossimità dei
busbars.
Come mostrato in figura, prima dell'occorenza del guasto (t=0.025) l'ampiezza istantanea è
piatta. Quando i disturbi generati dall'errore arrivano allo strumento di misura, si verifica
un brusco incremento dell'ampiezza istantanea.
E' quindi facile trovare gli istanti di tempo in cui l'onda del guasto arriva ai busbars. Nel
nostro caso viene preso in considerazione l'istante del picco dell'ampiezza istantanea (sia
per le misurazioni del busbar 1 che del busbar 2).
Attraverso l'elaborazione dei dati raccolti si ha che la location del guasto è a distanza
14963 km dal busbar 1, quindi si presenta un errore di soli 37m.
La velocità dell'onda è stata calcolata utilizzando la formula introdotta precedentemente:
𝑣 =2∙𝑙𝑙𝑖𝑛𝑒
∆𝑡, ottenendo una velocità uguale a 𝑣 = 29717 ∙ 108𝑚/𝑠
27
Conclusioni
Il lavoro svolto nella redazione del presente elaborato si poneva come primo obiettivo lo
studio di strumenti di analisi di segnali, alternativi a quelli storicamente utilizzati, e come
obiettivo secondario lo studio di una applicazione dei suddetti strumenti per la detection di
guasti elettrici.
In primis, si può affermare che la trasformata di Huang - Hilbert è un ottimo strumento per
l'analisi di segnali non stazionari o non lineari, tuttavia come discusso sia nel primo che
nel secondo capitolo, questa trasformata presenta ancora delle problematiche, alcune
risolte tramite l'introduzione dell'algoritmo EEMD.
Nella parte finale dell'elaborato, invece, è stata studiata l'applicazione della trasformata di
Huang - Hilbert per la detection di un guasto elettrico in una rete elettrica di potenza, con
ottimi risultati. L'errore riscontrato nella detection è, infatti, relativamente basso.
Ovviamente, il lavoro svolto non si pone come obiettivo quello di chiudere le discussioni
sull'argomento. Sono necessari ancora molti studi, per conoscere a fondo le potenzialità
della trasformata di Huang-Hilbert, sia la versione che utilizza l'EMD, sia quella che
utilizza l'EEMD.
L'unico pensiero che mi sento di affermare con certezza è che con l'avvento di trasformate
come la Huang-Hilbert si possa espandere la conoscenza nel campo dell'analisi numerica,
attraverso lo studio di segnali non stazionari e non lineari, cosa che fino ad ora era
impensabile, vista la mancanza di adeguati strumenti matematici.
28
Bibliografia
[1] Norden E. Huang, Zheng Shen, Steven R. Long, Manli C. Wu, Hsing H. Shih,
Quanan Zheng, Nai-Chyuan Yen, Chi Chao Tung and Henry H. Liu, The empirical mode
decomposition and the Hilbert Spectrum for non-linear and non-stationary time series
analysis, The Royal Society , 96 pagine, 4 Novembre 1996.
[2] Aldo Baccigalupi, Annalisa Liccardo, The Huang Hilbert Transform for evaluating
the instantaneous frequency evolution of transient signals in non-linear systems,
Department of Electrical Engineering and Information Technology, University of Naples
Federico II , 31 pagine, 16 Luglio 2015.
[3] Alen Bernadic, Zbigniew Leonowicz, Fault Locations in power networks with
mixed feeders using the complex space-phasor and Hilbert-Huang transform, International
journal of Electrical Power & Energy Systems, volume 42 (208-219), 11 pagine, 9 Aprile
2012.
[4] Zhaohua Wu, Norden E. Huang, Ensemble Empirical Mode Decomposition: a noise
assisted data analysis method, 49 pagine, Agosto 2005.





















![[FisTum] Hilbert](https://img.pdfslide.tips/doc/110x75/577ccefd1a28ab9e788e96f5/fistum-hilbert.jpg)







