Embed Size (px)
Citation preview

SEZIONE 3 APPLICAZIONI DI CINEMATICA
In questa sezione si presentano alcuni esempi di applicazioni della teoria cinematica sviluppata nei due capitoli precedenti a dispositivi meccanici particolari. Per poter considerare di aver realmente appreso i concetti teorici, lo studente deve essere in grado di risolvere agevolmente i problemi presentati di seguito. La tecnica di soluzione consiste in generale nello scrivere per ciascuno dei corpi rigidi del sistema l’equazione fondamentale di corpo rigido ed imponendo successivamente i vincoli cinematici esistenti. 3.1 BRACCIO ROBOTICO Il braccio robotizzato considerato nella figura sottostante consiste di un motore M1 che mette in rotazione la colonna verticale C.
z=z’
z’’
x x’
y
y’
y’’
x’’
θ
φ
Motore M1
Motore M2
P
O’’
O=O’
C S L
A a h
e

Solidale ad essa è la struttura a sbalzo S alla cui estremità è collocato un motore M2 che mette in rotazione l’albero A che attraverso un gomito è collegato all’elemento P. Assegnate le funzioni )(tθ e )(tϕ determinare la traiettoria di P e calcolare il modulo della sua accelerazione in funzione del tempo. Scelti 3 sistemi di riferimento come nel disegno (R fisso, R’ solidale a C, R’’ solidale all’albero di M2), scriviamo le equazioni della cinematica dei due corpi rigidi che costituiscono il sistema:
xRxxxRx
O ′′+′=′
′=)2(
''
)1(
dove sono il vettore delle coordinate di posizione di un generico punto riferite a R, le matrici delle rotazioni prodotte dai motori M1 e M2, il vettore delle coordinate di posizione di un punto riferite a R’, il vettore delle coordinate di posizione di un punto riferite a R’’, il vettore delle coordinate di posizione dell’origine O’’ riferite al sistema R’.
'')2()1( ,,,,, OxxxRRx ′′′′
Sostituendo la seconda equazione nella prima otteniamo:
( ) xRRxRxRxRx OO ′′+′=′′+′= )2()1(''
)1()2(''
)1( Tale relazione è del tutto generale. Consideriamo ora i vincoli cinematici esistenti. La colonna C esegue solo rotazioni attorno all’asse z. Pertanto la sua matrice di rotazione ha forma:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
1000cossin0sincos
)1( θθθθ
R
che descrive la rotazione di R’ rispetto a R con assi z e z’ coincidenti. L’albero motore A è vincolato poi a ruotare attorno all’asse x’, dunque la matrice
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
ϕϕϕϕ
cossin0sincos0001
)2(R
descrive la rotazione di R’’ rispetto a R’ con gli assi x’ e x’’ coincidenti. Considerando il punto P, fisso nel sistema di riferimento R’’, abbiamo:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=′′
e
a0x

Infine l’origine del sistema R’’ è un punto di coordinate fisse nel sistema R’ solidale alla colonna:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=′
hLO
0
''x
Allora:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−⋅
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
e
a
hL 0
cossin0sincos0001
1000cossin0sincos0
1000cossin0sincos
ϕϕϕϕθθ
θθθθθθ
x
Sviluppando i prodotti si ottengono le coordinate di P nel sistema di riferimento fisso al variare del tempo, cioè le equazioni parametriche dalla traiettoria di P. Le loro derivate seconde rispetto al tempo producono le componenti dell’accelerazione di cui si calcola agevolmente il modulo.

3.2 RUOTA Un disco D di raggio r tangente alla retta σ , rotola su questa senza strisciamenti. Determinare la traiettoria γ seguita da un punto P del disco che si trovi a distanza ½ r dal suo centro.
y y’
P
Scelti due riferimenti R e R’ (R fisso, R’ solidale a D) come nel disegno, abbiamo:
xRxx ′+= 'O
con
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=′
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
02/
0,
1000cossin0sincos
rxR θθθθ
La matrice descrive la rotazione di R’ rispetto a R con assi z e z’ coincidenti (ortogonali al piano del disegno). Con riferimento al punto P abbiamo poi
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
0)()(
'
'
' tytx
O
O
Ox
dove le coordinate sono per il momento incognite. )(),( '' tytx OO
x’
O’ γ
O x=σ C

La condizione che non vi sia strisciamento nel punto di contatto C tra disco e retta impone che i punti materiali, uno appartente a D l’altro a σ , che si trovano nel generico istante t nel punto di contatto C hanno la stessa velocità. Quella dei punti di σ è sempre nulla, per cui si deve imporre che il punto materiale di D che si trova in C abbia velocità nulla. Dalla formula fondamentale della cinematica:
COωvv '' ×+= OC
Pertanto, considerato che , si ottiene: ⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−=0
0' rCO
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧⇒
−+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
00
0000
0000
0000
'
'
'
' θθ
&
&
&&&
& ryx
ryx
O
O
O
O kji
Questa condizione, che è il vincolo cinematica, permette di determinare per integrazione le funzioni incognite : )(),( '' tytx OO
ryrx OO =−= '' ,θ
A questo punto, riprendendo la xRxx ′+= 'O , determiniamo il vettore di posizione di P:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
02/
0
1000cossin0sincos
00rr
ryx
p
p
θθθθθ
che fornisce le parametriche della traiettoria rappresentata nella figura sottostante.
Traiettoria di P nel piano xy per r =1

3.3 ROTISMO PLANETARIO Per il rotismo planetario schematizzato sotto, è assegnata la rotazione )(tθ della ruota S (sun). Considerato fisso l’anello esterno (ring), determinare la rotazione )(tψ del portatreno (arm). Determinare il rapporto tra la velocità angolare di S e quella del portatreno. Determinare infine la traiettoria di un punto Q che dista dall’asse di rotazione della ruota P. Tutte le ruote rotolano senza strisciamenti.
2/pR
yS y
Si scelgono 3 sistemi di riferimento come indicato in figura, solidali rispettivamente al ring, alla ruota S e alla ruota P.
S
P
OS
OP
x
yP
xP
xS
Q C2
C1

Consideramo i vincoli cinematici. Le condizioni che le ruote rotolino senza strisciamento implicano dei vincoli cinematici tali che: i) il punto materiale della ruota S e quello della P che si trovino simultaneamente in C1 abbiano la stessa velocità, ii) la velocità del punto materiale di P che si trova in contatto con il ring in C2 abbia velocità nulla. Dunque:
0COωvCOωvCOω =×+×+=× 211 , ppOpPPOpSS Sostituendo la seconda nella prima:
)( 211 COCOωCOω PPPSS −×=×
Poiché , segue: 12 COCO PP −=
11 2 COωCOω PPSS ×=×
Inoltre PSSP rr ⋅−=⋅ 11 COCO , da cui:
θϕθϕP
S
P
SS
P
SPSP
S
PSS r
rr
rr
rrr
222,2 11 −=⇒−=⇒−=⇒×−=× &&ωωCOωCOω
L’equazione fondamentale della cinematica per il portatreno (arm) comporta:
SPS
SAPS
P
SPPPSAOp rr
rr
rωωCOωCOωOOωv
)(22 22 +=⇒×=×−=×=
che fornisce il rapporto di riduzione del treno planetario. da cui:
)()(2
)( trr
rt
PS
S θψ+
=
La traiettoria di Q si determina sulla base delle
( ) ( ) ,, AA
OpPP
Op xRxxRxx =+= con ovvie espressioni per le matrici di rotazione che descrivono rotazioni attorno all’asse ortogonale al piano del disegno:
( ) ( )
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
1000cossin0sincos
,1000cossin0sincos
ϕϕϕϕ
ψψψψ
PA RR

dove . Fissando l’attenzione sul punto Q si ha e dunque la
traiettoria di Q è descritta dalle equazioni parametriche:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧+=0
0
PSA rrx⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
02/
0
PP rx
ϕψϕψ
cos2/cos)(sin2/sin)(
PPS
PPS
rrryrrrx
++=−+−=
La traiettoria ricavata è rappresentata nella figura sottostante per 3,1 == PS rr .

3.4 ANALISI DEL MANOVELLISMO MOTORE
Studio n.1
Vista longitudinale e trasversale del propulsore per autovettura Fiat 132 Dati: 4 cilindri in linea, alesaggio 84 mm, corsa 90 mm, cilindrata 1995 cm3 , rapporto di
compressione 8,9:1, potenza massima 112 Cv a 5600 giri/min, coppia max 158 Nm a 3000 giri/min
Dato il motore rappresentato in sezione longitudinale e trasversale sul cilindro, si effettui l’analisi cinematica del manovellismo motore, fornendo: • la velocità del pistone al variare dell’angolo motore; in particolare si individui la velocità massima raggiunta dal pistone al regime di potenza massima determinando l’angolo motore in corrispondenza del quale questa viene raggiunta; • l’accelerazione del pistone al variare dell’angolo motore; si determini poi la componente della forza lungo la direzione dell’asse del cilindro che si trasmette tra pistone e biella al regime di 5600 giri/min considerando nulla la pressione dei gas sul pistone (si assuma la massa del pistone sia pari a 0.35 kg). Effettuare l’analisi sia con il metodo delle equazioni di chiusura che con il metodo dei poligoni di velocità e ed accelerazione. I dati necessari per studiare il manovellismo motore sono il raggio di manovella e la lunghezza di biella. Il raggio di manovella è determinabile dai dati forniti essendo nota la corsa pari a 90 mm; il raggio di manovella è allora R=45 mm. La lunghezza della biella non è invece fornita tra i dati e deve essere rilevata dai disegni considerando che è noto, ad esempio, l’alesaggio pari a 84 mm. La proporzione fornisce una lunghezza di biella pari a L=130 mm.

Alesaggio 84 mm
Lungh. biella 130 mm

Nella figura sottostante è evidenziata la misura del raggio di manovella.
Raggio manovella 45 mm
Lo schema cinematico del sistema studiato è piuttosto semplice e sotto riportato.
y
A
O )(tθ B
)(tβ px

La manovella è accoppiata al basamento attraverso la coppia rotoidale posta in O, la biella e accoppiata alla manovella attraverso la coppia rotoidale posta in A, la biella è accoppiata al pistone attraverso un’ulteriore coppia rotoidale posta in B; infine l’accoppiamento pistone-cilindro obbliga l’estremo della biella a scorrere lungo l’asse del cilindro OB, realizzando una guida prismatica; pertanto il vincolo sull’estremo della biella collegato al pistone è equivalente ad un glifo.
Il sistema è costituito nella schematizzazione effettuata di due corpi rigidi; nel piano ciascuno di essi ha 3 gradi di libertà per cui 6 sarebbero i gradi di libertà introdotti. I vincoli sottraggono invece 2 gradi di libertà per ciascuna delle due coppie rotoidali in O e A, più un ulteriore grado di libertà è sottratto dal glifo in B: complessivamente sono sottratti 5 gradi di libertà; ne segue che il meccanismo presenta 6-5=1 grado di libertà. Assumiamo noto l’angolo motore )(tθ che, nel caso in esame essendo la velocità angolare costante (cioè = costante), è mt ωθ =)(& tt mωθ =)( .

Metodo delle matrici di rotazione
Per tali meccanismi si può applicare il metodo già visto in precedenza: si scrive per ogni corpi rigido del meccanismo l’equazione fondamentale della cinematica e si impongono quindi i vincoli cinematici. Consideriamo allora il sistema R solidale al basamento motore, il sistema R’ solidale alla manovella ed il sistema R’’ solidale alla biella. Possiamo scrivere:
xRxxxRx
O ′′+′=′
′=)2(
''
)1(
Sostituendo la seconda equazione nella prima otteniamo:
( ) xRRxRxRxRx OO ′′+′=′′+′= )2()1(''
)1()2(''
)1(
dove è già stato imposto il vincolo cinematica che impone che il punto O sia fisso. I vincoli cinematici impongono che la manovella esegua semplici rotazioni attorno all’asse z, pertanto la sua matrice di rotazione ha forma:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
1000cossin0sincos
)1( θθθθ
R
che descrive la rotazione di R’ rispetto a R con assi z e z’ coincidenti. La biella è vincolata ancora a ruotare attorno all’asse z’, dunque la matrice
)(tθ
)(tγ
px
y
O
A
B
x’
y’’
y’ x’’
x

⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
1000cossin0sincos
)2( γγγγ
R
descrive la rotazione di R’’ rispetto a R’ con gli assi z’ e z’’ coincidenti. Ulteriore vincolo è che l’origine del sistema R’’ (coincidente con il punto A) è un punto di coordinate fisse nel sistema R’ solidale alla manovella:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=′
00''
R
Ox
Dunque, combinando le precedenti:
xx ′′⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −⋅⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
1000cossin0sincos
1000cossin0sincos
00
1000cossin0sincos
γγγγ
θθθθ
θθθθ R
Considerato infine il punto B di coordinate fisse in R’’:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=′′
00L
Bx
l’ultimo vincolo cinematico impone che B (asse dello spinotto del pistone) sia vincolato a restare sulla retta x, ossia che 0≡By . Pertanto:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −⋅⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
00
1000cossin0sincos
1000cossin0sincos
00
1000cossin0sincos
00
LRxB
B γγγγ
θθθθ
θθθθ
x
Sviluppando segue:
( )( )⎩
⎨⎧
=++++=
0sinsincoscos
γθθγθθ
LRLRxB
che è un sistema di equazioni trascendenti in γ,Bx ( )(tθ è noto). La sua soluzione conclude la analisi di posizione del meccanismo. L’analisi di velocità e accelerazione può

essere eseguita utilizzando le formule ricavate nel capitolo 2 o derivando direttamente rispetto al tempo le ultime equazioni scritte.
Metodo delle equazioni di chiusura del meccanismo
Per i meccanismi articolati piani è utile fornire una tecnica di soluzione particolare veloce basata sulle equazioni chiusura del meccanismo. Si noti infatti che i vincoli cinematici impongono il verificarsi della seguente equazione di chiusura cinematica:
BOABOA ====++ 321321 ,,,0 zzzzzz rrrrrrr
Si ha dunque:
⎭⎬⎫
⎩⎨⎧−
=⎭⎬⎫
⎩⎨⎧−
=⎭⎬⎫
⎩⎨⎧
=0
,sin
cos,
sincos
321px
zL
Lz
RR
z rrr
ββ
θθ
Le incognite sono β e , risolubili attraverso la coppia di condizioni scalari corrispondenti all’equazione di chiusura cinematica. In forma esplicita il sistema di equazioni è:
px
⎩⎨⎧
=−=−+
0sinsin0coscos
βθβθ
LRxLR p (1)
Che, come noto, è non lineare (si osservi cheθ è stato assunto positivo per rotazioni antiorarie della manovella, mentre β è stato assunto positivo per rotazioni orarie della biella. Si noti che il metodo fornisce lo stesso risultato ottenuto con il metodo precedente appena si noti che 0=++ βθγ , cioè βθγ −=+ ). E’ possibile in questo caso una soluzione in forma chiusa. Infatti:
⎩⎨⎧
=+−=
⇒⎩⎨⎧
=−=
θβθθ
θβθβ
sinsinsin)cos(
sinsincoscos 2222
RLRRxL
RLRxL pp
Esplicitando la posizione del pistone dalla prima e l’angolo di biella dalla seconda otteniamo:
⎪⎩
⎪⎨
⎧
⎟⎠⎞
⎜⎝⎛=
−+=
θβ
θθ
sinarcsin
sincos 222
LR
RLRx p (2)
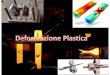
Posto R=45 mm e L=130 mm, diagrammiamo in funzione dell’angolo motore la posizione del pistone e l’inclinazione della biella.
L’ascissa dello spinotto varia tra 175 mm (somma di L ed R) e 85 mm (differenza tra L ed R). L’angolo di biella varia invece tra circa -20° e 20°. Questo completa l’analisi di posizione. Effettuiamo l’analisi di velocità. La velocità si ricava o per derivazione diretta delle espressioni (2), o per derivazione dell’equazione di chiusura cinematica (1). Seguiamo questa seconda via. Abbiamo:

⎩⎨⎧
=−=−−−
0coscos0sinsin
ββθθββθθ
&&
&&&
LRxLR p (3)
Dalla precedente analisi di posizione sono note βpx e le incognite del problema sopra
sono ora . Il sistema è lineare in queste due incognite. Abbiamo in forma matriciale: β&& px
θθθ
βββ &
&&
⎭⎬⎫
⎩⎨⎧−
=⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡−−−
cossin
cos0sin1
RRx
LL p
Risolvendo:
( )βθθθ
ββθθ
βθβθθθ
ββ
βθβθ
coscos
cos0sin1cos0
sin1
cossin
cos0sin1
coscossinsin
&&&&&&LR
LLR
R
tgR
LL
LRLR
x p =
−−−−
−
=+−=
−−−
−−−
=
I diagrammi delle due grandezze ora calcolate sono fornite nelle figure che seguono.

Passiamo allo studio delle accelerazioni. Derivando l’equazione (3):
⎩⎨⎧
=+−−=−−−−−
0sincossincos0cossincossin
22
22
ββββθθθθββββθθθθ
&&&&&&
&&&&&&&&
LLRRxLLRR p
In quest’equazione le incognite sono essendo invece note dall’analisi di posizione
e di velocità . Tale problema lineare si traduce matricialmente nella forma: px&&&&β
pp xx &&ββ
⎭⎬⎫
⎩⎨⎧
−+−++
=⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡−−−
ββθθθθββθθθθ
βββ
sinsincoscoscossin
cos0sin1
22
22
&&&&
&&&&
&&
&&
LRRLRRx
LL p
da cui si ricavano le espressioni delle accelerazioni del pistone e della biella:
ββ
ββθθθθββθθθθ
β
ββ
βββθθθθβββθθθθ
cos0sin1
sinsincos0coscossin1
,
cos0sin1
cossinsincossincoscossin
22
22
22
22
LL
LRRLRR
LL
LLRRLLRR
x p
−−−
−+−++−
=
−−−
−−+−−++
=&&&&
&&&&
&&&&&&
&&&&
&&
Considerato che nel problema in esame , e dunque: mωθθ == &&& ,0

ββ
ββθθββθθ
β
ββ
βββθθβββθθ
cos0sin1
sinsin0coscos1
,
cos0sin1
cossinsinsincoscos
22
22
22
22
LL
LRLR
LL
LLRLLR
x p
−−−
−+−
=
−−−
−−−+
=&&
&&
&&&&
&&
&&
βθωββ
ββ
βθωβcos
sin/sin,
cos)cos( 2222
mmp
LRRLx
−=
++−=
&&&
&&&
I diagrammi rispettivi sono forniti di seguito.

Per rispondere alla domanda del quesito posto circa la massima forza trasmessa al pistone basta moltiplicare l’accelerazione massima per la massa del pistone. Nel grafico sotto riportato è fornita la forza sul pistone in direzione dell’asse del cilindro (in kg forza).
Metodo dei poligoni di velocità e accelerazione
Si tratta di una metodologia di soluzione usata soprattutto in passato, quando non esistevano mezzi di calcolo elettronico. In quest’ambito si suppone che l’analisi di posizione del meccanismo sia già stata effettuata. In altri termini è già nota una configurazione del meccanismo: sono dunque già state determinate le incognite cinematiche β e . Tale risultato potrebbe essere stato conseguito, ad esempio, per via grafica, disegnando il meccanismo nella configurazione che corrisponde ad un assegnato angolo di manovella
px
θ , rispettando i vincoli relativi all’assegnato raggio di manovella, lunghezza di biella e collocazione dell’estremo della biella sulla congiungente O e B. In quanto segue, si effettua l’analisi di velocità ed accelerazione associata alla posizione del meccanismo assegnata. Ciò comporta che tale analisi vada ripetuta per ciascuna delle configurazioni di interesse del meccanismo. Partiamo dall’analisi di velocità della manovella, applicando ad essa l’equazione fondamentale della cinematica (equazione (8) della sezione 2 sul corpo rigido):
POωvv '' ×+= OP
Utilizzando come origine O’ del sistema solidale alla manovella il punto O, e ponendo P=A, la velocità di A si calcola come:
OAωvv ×+= mOA
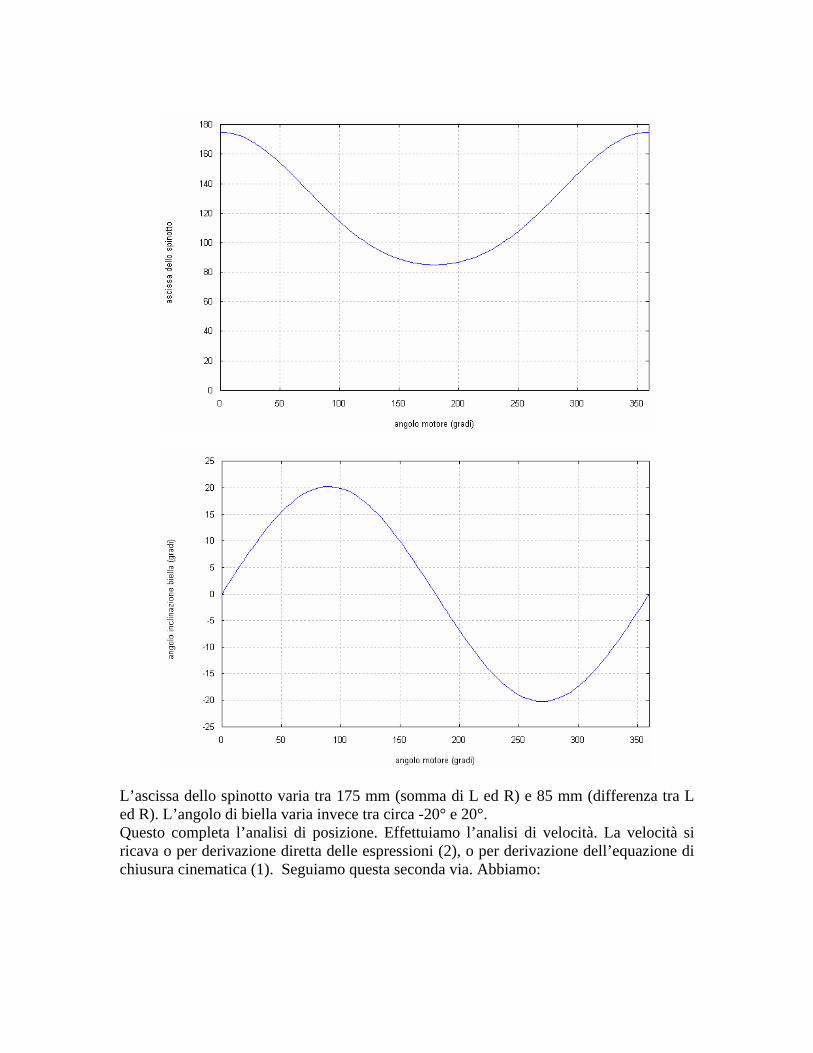
dove è la assegnata velocità angolare della manovella (la direzione si sviluppa ortogonalmente al piano del moto -cioè ortogonalmente al piano del disegno sottostante-, il verso sia quello uscente dal piano del disegno, associato ad una rotazione antioraria della manovella). Poiché si ha
mω
0v =O OAωv ×= mA . Dunque il vettore OAωv ×= mA è completamente noto. In particolare il modulo, con i dati del problema, è circa 26 m/s. Lo si disegni allora con il suo primo estremo in corrispondenza del punto A (o di un altro qualsiasi punto del piano, essendo tale scelta irrilevante nella procedura esposta) con una lunghezza arbitraria (nel disegno pari a 3 cm). La sua direzione è ovviamente ortogonale a quella del vettore (vedi figura sottostante). OA
y
)(tθ )(tβ O
A
Av 26 m/s
B
L’analisi di velocità fatta in tal modo può essere estesa ad un qualunque punto della manovella. Passiamo all’analisi di velocità della biella. Scriviamo per essa ancora l’equazione fondamentale della cinematica, ponendo in questo caso O’=A, P=B:
ABωvv ×+= bAB (4)
dove è la velocità angolare della biella. Si osservi che in tale equazione risultano incognite alcune quantità. Del vettore è nota la direzione (quella di OB) ma incognito il modulo. Del vettore è noto tutto dall’analisi di velocità della manovella. Del vettore
è nota la direzione (ortogonale al piano del moto) ma incognito il modulo. Infine del vettore è noto tutto, poiché si è supposto che l’analisi di posizione del meccanismo sia già stata effettuata. Dunque, l’equazione fondamentale della cinematica per la biella contiene due informazioni incognite: il modulo della velocità angolare, ed il modulo della velocità del punto B. Poiché l’equazione è vettoriale nel piano, questa è equivalente a due equazioni scalari: pertanto con l’equazione scritta siamo in grado di determinare le due incognite del problema. Effettuiamo questa determinazione in forma grafica. La (4) prescrive di sommare al vettore , noto, un vettore
bω
Bv
Av
bωAB
Av ABω ×b ortogonale alla direzione

AB di cui non conosciamo il modulo. Individuiamo sul disegno la direzione secondo cui si sviluppa e riportiamo tale direzione in corrispondenza dell’estremo del
vettore precedentemente disegnato. La somma di e di ABω ×b
Av Av ABω ×b deve fornire un vettore in direzione parallela a OB. Riportiamo allora anche la direzione parallela ad OB nel disegno, facendola passare per A. E’ chiaro a questo punto che l’unico modo per scegliere il verso e la lunghezza incognita del vettore
Bv
ABω ×b , affinché sommato a fornisca un vettore parallelo ad OB, è quello di tracciarlo dell’estremo di fino al punto Q (intersezione tra la direzione ortogonale ad AB e quella parallela a OB).
Av
Av
A questo punto tracciamo i vettori ABω ×b e sul disegno (vedi figura). Bv
)(tθ )(tβ
Q Bv
ABω ×b
R
)(tθ
Direzione ortogonale ad AB
Direzione parallela ad OB Q
)(tβ
y
O
A
Av
B
y
O
A
Av
B

Si calcolano quindi le lunghezze sul disegno dei due vettori rappresentativi di e (nel nostro disegno approssimativamente 2.4 cm e 2.7 cm) e con una proporzione si
determinano le intensità dei vettori rappresentati (ad es. x : 2.4 = 26 : 3 cioè x=20.8 m/s per e 23.4 m/s per ). La determinazione di
ABω ×b
Bv
ABω ×b Bv bω è poi immediata. Consideriamo ora le accelerazioni. Partiamo dalla manovella. Per questa scriviamo l’equazione (10) della sezione 2 sul corpo rigido:
)'('' POωωPOωxa ××+×+= &&& OP Poniamo O’=O e P=A e considerato che 0ω =m& , che il moto è piano e che si ha: 0a =O
OAωa 2
mA −= che permette di disegnare immediatamente il vettore (vedi figura sottostante). Aa
y
A
Considerata la biella, poniamo nell’equazione dell’accelerazione O’=A, P=B:
ABωABωaa ×+−= bbAB &2
Anche in quest’equazione abbiamo due incognite. Infatti: di è nota la direzione, incognito il modulo; è completamente noto dalla precedente analisi di accelerazione; di è nota la direzione (ortogonale al piano del moto), incognito il modulo; è completamente noto; infine
Ba
Aa
bω& AB
bω è stato determinato nella precedente analisi di velocità. Bisogna dunque determinare i moduli di e . L’equazione scritta è al solito equivalente a due equazioni scalari ed è quindi possibile risolvere il problema. Sommiamo, come prescrive l’ultima equazione scritta, al vettore il vettore
Ba bω&
Aa
ABω 2b− (vedi figura sottostante).
O B )(tθ
Aa
)(tβ

y
A
B )(tθ
Aa Q
ABω 2−
A detta somma bisogna ancora aggiungere il vettore ABω ×b& la cui direzione è ortogonale ad AB. La risultante dei tre vettori deve essere pari a di direzione parallela
a OB. Tracciamo la direzione perpendicolare ad AB per l’estremo del vettore Bv
ABω 2b−
(vedi figura) e la direzione OB passante per A. Ci si rende conto che l’unico modo per tracciare il vettore lungo la sua direzione in modo che la somma ABω ×b&
ABωABωa ×+− bbA &2 sia diretta come , cioè come OB, è quello di portare il suo
secondo estremo in Q. Segue quindi il quadrilatero delle accelerazioni (vedi figura seguente). Il rilievo dei vettori rappresentativi e la determinazione delle intensità dei vettori accelerazione segue l’identico procedimento visto per le velocità.
Ba
Osserviamo che il procedimento esposto per l’analisi delle velocità e delle accelerazioni è piuttosto lungo, visto che lo si deve ripetere per ogni configurazione di interesse del meccanismo; inoltre l’accuratezza dei risultati è scarsa. Vediamo però che il metodo dei poligoni di velocità ed accelerazione può essere applicato anche evitando i calcoli grafici. Considerato infatti il triangolo di vertici AQR, i
y
A
B )(tθ
Aa Q Ba
O )(tβ b
ABω ×b&
ABω 2−
O )(tβ b

suoi angoli si determinano sulla base di semplici considerazioni geometriche:
. Il teorema dei seni applicato al triangolo AQR fornisce allora:
βθβπθπ +=−=−= ARQRQAQAR ˆ,2/ˆ,2/ˆ
BAb
ARQRQAQARvvABω
)ˆsin()ˆsin()ˆsin(==
×
Per cui noti gli angoli in questione dall’analisi di posizione, si calcolano, analiticamente, le velocità. Un altro modo analitico di procedere utilizzando direttamente le equazioni fondamentali della cinematica è quello di servirsi delle:
OAωv ×= mA ABωvv ×+= bAB
scrivendone esplicitamente le componenti. Si ha:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧⇒
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧⇒×=
0cossin
00sincos
0000000
0θωθω
θθ
ωω
RR
vv
RR
vv
m
m
Ay
Ax
m
m
Ay
Ax
mA OAωv
avendo utilizzato l’informazione che il vettore è ortogonale al piano del moto. Ci si convince facilmente che quello ottenuto è lo stesso risultato ottenuto per via grafica per la velocità . Passando alla biella ed ancora imponendo che la velocità sia ortogonale al piano del moto (si osservi che per seguire la stessa scelta fatta nell’analisi con le equazioni di chiusura, ossia
mω
Av bω
θ è stato assunto positivo per rotazioni antiorarie della manovella, mentreβ è stato assunto positivo per rotazioni orarie della biella, segue una differenza nel segno degli elementi della matrice della velocità angolare):
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧⇒×+=
0sin
cos
0000000
0cossin
0ββ
ωω
θωθω
LL
RR
vv
b
b
m
m
By
Bx
bAB ABωvv (5)
ed utilizzando l’informazione per cui è orientato come OB, ossia è nulla la sua componente lungo y, si ha:
Bv
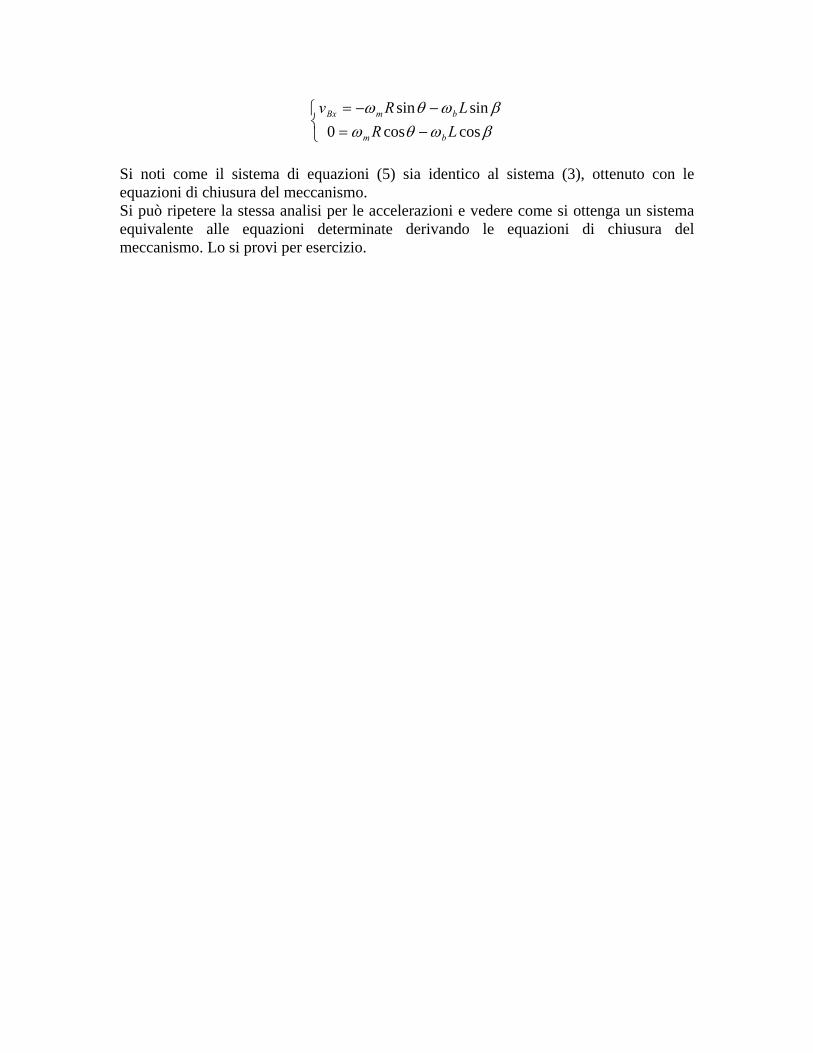
⎩⎨⎧
−=−−=
βωθωβωθω
coscos0sinsin
LRLRv
bm
bmBx
Si noti come il sistema di equazioni (5) sia identico al sistema (3), ottenuto con le equazioni di chiusura del meccanismo. Si può ripetere la stessa analisi per le accelerazioni e vedere come si ottenga un sistema equivalente alle equazioni determinate derivando le equazioni di chiusura del meccanismo. Lo si provi per esercizio.

Studio n.2
Sezione trasversale del propulsore per autovettura Ferrari
Dati: 12 cilindri a V di 60°, alesaggio 81 mm, corsa 71 mm, cilindrata 4390 cm3 , rapporto di compressione 8,8:1, potenza massima 320 Cv a 6600 giri/min, coppia max 362,8 Nm a 5000
giri/min
Dato il motore rappresentato in sezione trasversale sul cilindro, si effettui l’analisi cinematica del manovellismo motore, fornendo: • la velocità del pistone al variare dell’angolo motore; • l’accelerazione del pistone al variare dell’angolo motore. Si esegua l’analisi cinematica sia con il metodo delle equazioni di chiusura del meccanismo sia con il metodo dei poligoni di velocità ed accelerazione (in forma grafica ed analitica).

3.5 ANALISI DI UNA SOSPENSIONE PER AUTOVEICOLO
(A) (B)
(C)
(A) Vista trasversale di un sistema di sospensione a quadrilateri deformabili (B) Sistema di sospensione a quadrilatero deformabile (Ferrari F40, completo di
disco e pinza del freno e del braccio di comando della ruota sterzante) (C) Vista sospensione anteriore a quadrilatero deformabile (Ferrari Testarossa,
visibile sulla destra la barra di torsione). Assegnati in forma parametrica i dati geometrici della sospensione, determinare la potenza dissipata nell’ammortizzatore idraulico quando sia assegnata la velocità angolare del braccio inferiore EAB; determinare infine la componente verticale della velocità di Q.

Lo schema cinematico della sospensione (prossimo al sistema raffigurato in (A)) è:
Schema cinematico
Vista della sospensione reale
F
α
D
β ϕ C
E θ A Q
B
F
D
C Q
E A
B

Consideriamo inizialmente il numero dei gradi di libertà del meccanismo. Il dispositivo di sospensione consta di 5 elementi: braccio inferiore EAB, elemento portante la ruota BC, braccio superiore CD, pistone collegato in E al braccio inferiore EAB, guida del pistone vincolata in F al telaio. Sono quindi potenzialmente presenti 15 gradi di libertà del meccanismo ridotti dai vincoli seguenti: 6 coppie rotoidali in A, B, C, D, E, F più l’accoppiamento prismatico pistone-guida, per un totale di 14 gradi di libertà impediti. Ne segue che il meccanismo considerato ha un solo grado di libertà. Supponiamo allora sia assegnato l’angolo di inclinazione del braccio inferiore della sospensione pari a )(tθ (si assume positivo il verso antiorario di tutte le rotazioni). Scriviamo le equazioni di chiusura del meccanismo. In questo caso possiamo scrivere due equazioni di chiusura indipendenti. Precisamente:
( )( ) ⎭
⎬⎫
⎩⎨⎧−
=⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
++
=
⎭⎬⎫
⎩⎨⎧−−
=⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
=
====++
=====+++
ed
zxx
zLL
z
ba
zLL
zLL
zLL
z
zzzzzz
zzzzzzzz
764
45
43
33
2
22
1
11
765765
43214321
;sincos
;sincos
;sincos
;sincos
;sincos
,,,0
,,,,0
rrr
rrrr
rrrrrrr
rrrrrrrrr
ϕϕ
ψθψθ
ββ
αα
θθ
FAEFAE
DACDBCAB
dove ψe,,,, 4 edLba sono dati costruttivi della sospensione. Le incognite del problema sono x,,, ϕβα (mentre )(tθ è assegnato). Le due equazioni di chiusura equivalgono a 4 equazioni scalari per cui il problema è determinato. Si noti inoltre che le due equazioni di chiusura sono autonome, nel senso che la prima contiene le due sole incognite βα , , mentre la seconda le rimanenti due x,ϕ . La prima equazione di chiusura è:
⎩⎨⎧
=−=−
++
++
00
sincos
sincos
sincos
3
3
2
2
1
1
ba
LL
LL
LL
ββ
αα
θθ
(6)
Quadrando e sommando (eliminandoα ) si ha:
βθβθθθ sin)sin(2cos)cos(2)sincos(2 1313123
21
2222 bLLaLLbaLLLbaL −+−++−+++=

βθβθθθ sin)sin(2sin1)cos(2)sincos(2 132
13123
21
2222 bLLaLLbaLLLbaL −+−−±+−+++=
Posto:
( )( ) )cos(2
)sin(2)sincos(2)(
13
13
123
21
2222
aLLhbLLg
baLLLbaLf
−=−−=
++−−−−=
θθθθ
θθθ
( ) ( ) βθβθθ 2sin1sin)( −±=+ hgf
Quadrando e risolvendo per βsin :
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
+−+−±−
=θθ
θθθθθθθθβ 22
222222
arcsinhg
hfhggfgf
Con questa si risolve poi la seconda delle (6):
⎥⎦
⎤⎢⎣
⎡ −−=
2
13 sinsinarcsin
LLLb θβ
α
La seconda equazione di chiusura è invece:
( )( )⎩
⎨⎧
=−=+
++++
⇒=++0
0sin
cossincos
04
4765 e
dx
xLL
zzzϕϕ
ψθψθrrrr (7)
Eliminando ϕ con la solita tecnica, si ha:
( )[ ] ( )[ ]242
4 sincos ψθψθ +−+++= LeLdx
Con questa, dalla seconda, si ricava ϕ :

( )⎥⎦⎤
⎢⎣⎡ +−
=x
Le ψθϕ
cosarcsin 4
Questo conclude l’analisi di posizione.
Per rispondere al quesito posto dal problema, passiamo all’analisi di velocità del meccanismo. Derivando la (6):
⎩⎨⎧
==
+
−
+−−
00
cossin
cossin
cossin
3
3
2
2
1
1
ββββ
αααα
θθθθ
&
&
&
&
&
&
LL
LL
LL
Che dà luogo al sistema lineare:
⎭⎬⎫
⎩⎨⎧
−=
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡ −−
θθθθ
βα
ββ
αα
cossin
cossin
cossin
1
1
3
3
2
2
&
&
&
&
LL
LL
LL
Le cui soluzioni sono:
βαβαθββθθα
cossinsincoscossincossin
2
1
−−
= &&LL
βαβααθαθθβ
cossinsincoscossinsincos
3
1
−−
= &&LL
dove βα , sono stati determinati effettuando l’analisi di posizione. La posizione del punto Q si calcola nel modo:
21 zz rr λ+=+= BQABAQ
dove 2L
BQBCBQ
==λ che è un dato costruttivo della sospensione. Dunque la velocità
di Q è:

21 zzdtd &r&r λ+=AQ
essendo 21 zz &r&r ormai completamente noti dopo aver effettuato sia l’analisi di posizione che di velocità. Più precisamente, per la componente verticale della velocità, si ha:
ααλθθ coscos 21 && LLdtd
y
+=⎟⎠⎞
⎜⎝⎛ AQ
La potenza dissipata nell’ammortizzatore si calcola moltiplicando la forza che in esso si genera per la velocità di scorrimento del pistone nella guida cilindrica, cioè:
dissF
( ) 2xxxxFP dissdiss &&&& χχ ===
dove si ricava derivando l’equazione di chiusura cinematica (7) e x& χ è un fattore che dipende dalla realizzazione costruttiva dell’ammortizzatore.

3.6 COMANDO A GLIFO OSCILLANTE PER MACCHINA UTENSILE
F
Schema cinematico del sistema a glifo oscillante. In alto a sinistra un particolare del sistema di regolazione della corsa
Una macchina utensile utilizza il meccanismo in figura (glifo oscillante) per permettere alla slitta F di eseguire corse di andata e ritorno in tempi diversi (lenta la corsa in cui l’utensile, solidale alla slitta F, lavora, veloce la corsa di ritorno per il riposizionamento dell’utensile). Assegnati in forma parametrica i dati relativi alla geometria del dispositivo, si determini la velocità e l’accelerazione della slitta F in funzione dell’angolo di rotazione della ruota B, supponendo che questa ruoti a velocità angolare costante.