Embed Size (px)
Citation preview
Appunti del corso di Costruzioni di Macchine 2
PARTE VIII – Meccanica della Frattura (p.1)
INTRODUZIONE Nella lezione precedente si è cominciato a parlare di un argomento fortemente collegato al
fenomeno della fatica, cioè della meccanica della frattura. E’ bene non confondere, però, i due
concetti: una cosa è l’esistenza della frattura e la sua propagazione stabile o instabile, un’altra sono
i fenomeni di fatica.
Nella fatica il danneggiamento aumenta a causa di una frattura che si propaga, ma non è vero il
contrario, cioè se si osserva una frattura che si propaga non è detto che sia dovuta al fenomeno della
fatica. E’chiaro però che l’applicazione che interessa maggiormente è il legame tra la frattura e una
probabile causa come appunto la fatica. Esiste, infatti, anche la propagazione instabile della frattura
che, grazie al comportamento fragile del materiale e ad una velocità pari praticamente a quella del
suono, è a tutti gli effetti istantanea e si diffonde immediatamente per tutto il componente. Quindi i
due fenomeni vanno considerati separati e sono collegati tra loro in un senso(fatica → frattura) e
non nell’altro ( frattura non → fatica).
LUCIDO 3 (Ripetizione lezione precedente)
La cosa fondamentale da tener presente è che la presenza di fatica su un componente fa si che
l’esistenza di una frattura nel tempo venga amplificata, ovvero che una cricca nel componente
subisca un ingrandimento; e che contemporaneamente, a causa della riduzione della sezione
resistente e della tenacità del materiale, la resistenza residua del componente va man mano
diminuendo. Pertanto, se il coefficiente di sicurezza è sufficientemente elevato, non ci si accorge di
tale riduzione di resistenza, fintanto che questa (resistenza) non scende al di sotto del carico
nominale di esercizio comportando la rottura del componente. Esiste, inoltre, una fascia di
incertezza in cui può avvenire un sovraccarico e in corrispondenza di questo può presentarsi la
rottura del componente.
LUCIDO 4 (Ripetizione lezione precedente) ( Salta da 4 a 10)
E’stato detto che la frattura può essere di tipo fragile o duttile, e che in queste lezioni si parlerà di
frattura fragile poiché la frattura duttile è ancora poco conosciuta e i modelli utilizzati per essa
stanno avendo successo solo negli ultimi anni.
LUCIDO 11 e 12 (Ripetizione lezione precedente)
Il primo problema che si incontra in applicazioni sulla meccanica della frattura è quello di una
PIASTRA PIANA INDEFINITA che presenta una singola cricca di lunghezza 2a.
In base al modo in cui questa piastra viene caricata e come si riflette sulla cricca, si riconosce un
“MODO” che sostanzialmente si divide in :Modo I, II, III.
Il Modo I è quello che comporta la presenza di sollecitazioni che determinano l’allontanamento o
l’avvicinamento delle labbra della cricca, il Modo II e III, invece, sono caratterizzati da azioni
taglianti, dove il modo II non verrà studiato poiché raramente si verifica, mentre il modo III è legato
a sollecitazioni di taglio parallele alla cricca che possono contribuire all’innalzamento del livello
tensionale e contribuire alla propagazione della cricca. Il modo I è quello che maggiormente
interessa in quanto, essendo il più frequente, è quello fondamentale per il fenomeno della nascita e
propagazione della cricca ed è quello che si può più facilmente caratterizzare attraverso le proprietà
note del materiale.
Inoltre se si considera una piastra molto sottile (ma non necessariamente, va bene anche una piastra
molto spessa) sollecitata in uno dei tre modi, intorno all’apice della cricca si determina una zona,
2
tipo effetto di intaglio però molto più ingigantito in termini di intensità, nella quale si ha un effetto
locale cioè la cricca fa sentire la propria presenza.
LUCIDO 13 (Ripetizione lezione precedente)
Questo effetto locale è stato definito da Westergaard per primo in questo modo(Modello di
Westergaard per la rappresentazione degli sforzi in corrispondenza di una cricca).
egli utilizzò uno sviluppo in serie come segue, arrestandosi al primo termine :
In questi anni si sta cominciando ad usare anche il secondo termine di questa serie, dove il suo
utilizzo nei lavori specialistici viene introdotto come Pstress. Nelle applicazioni abituali questo
termine non viene considerato; invece è importante in quanto definisce delle ulteriori interazioni tra
le sollecitazioni che si verificano tra i tre assi. Si usa, ovvero, dire che il Pstress è un indice sulla
spazialità della cricca contrapposto alla planarità dell’effetto della cricca.
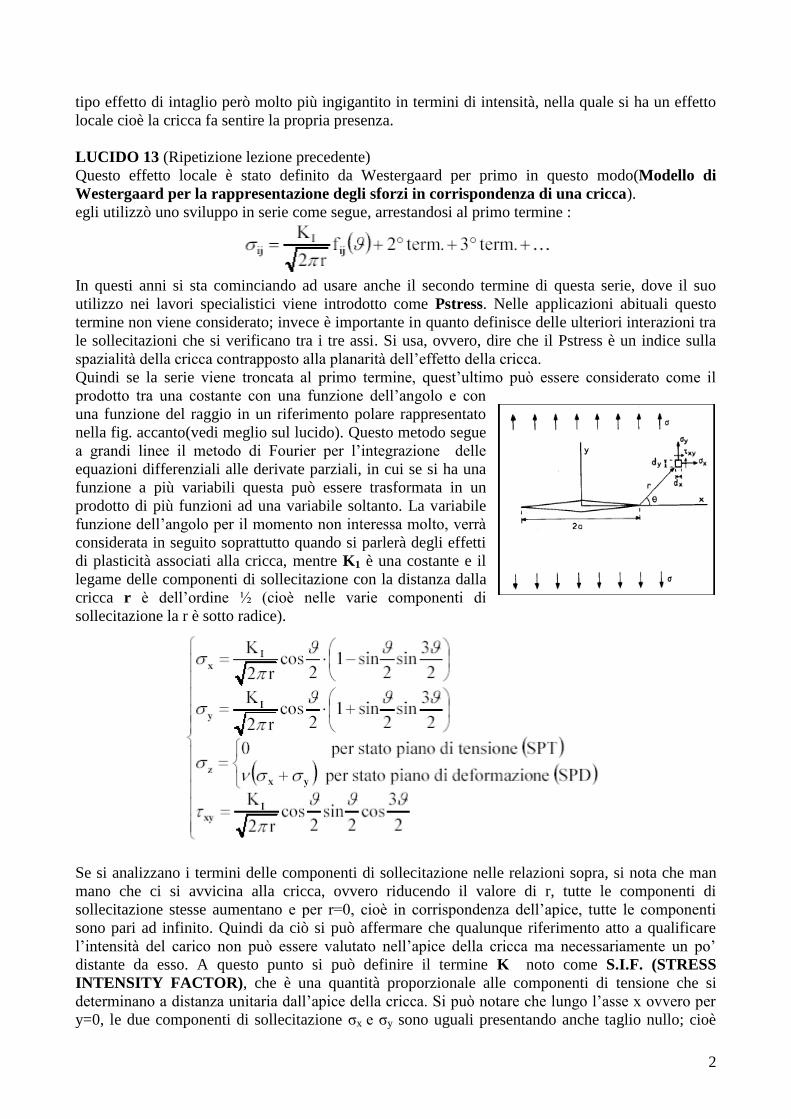
Quindi se la serie viene troncata al primo termine, quest’ultimo può essere considerato come il
prodotto tra una costante con una funzione dell’angolo e con
una funzione del raggio in un riferimento polare rappresentato
nella fig. accanto(vedi meglio sul lucido). Questo metodo segue
a grandi linee il metodo di Fourier per l’integrazione delle
equazioni differenziali alle derivate parziali, in cui se si ha una
funzione a più variabili questa può essere trasformata in un
prodotto di più funzioni ad una variabile soltanto. La variabile
funzione dell’angolo per il momento non interessa molto, verrà
considerata in seguito soprattutto quando si parlerà degli effetti
di plasticità associati alla cricca, mentre K1 è una costante e il
legame delle componenti di sollecitazione con la distanza dalla
cricca r è dell’ordine ½ (cioè nelle varie componenti di
sollecitazione la r è sotto radice).
Se si analizzano i termini delle componenti di sollecitazione nelle relazioni sopra, si nota che man
mano che ci si avvicina alla cricca, ovvero riducendo il valore di r, tutte le componenti di
sollecitazione stesse aumentano e per r=0, cioè in corrispondenza dell’apice, tutte le componenti
sono pari ad infinito. Quindi da ciò si può affermare che qualunque riferimento atto a qualificare
l’intensità del carico non può essere valutato nell’apice della cricca ma necessariamente un po’
distante da esso. A questo punto si può definire il termine K noto come S.I.F. (STRESS
INTENSITY FACTOR), che è una quantità proporzionale alle componenti di tensione che si
determinano a distanza unitaria dall’apice della cricca. Si può notare che lungo l’asse x ovvero per
y=0, le due componenti di sollecitazione σx e σy sono uguali presentando anche taglio nullo; cioè
3
per θ=0 σx e σy sono direzioni principali. Questo non avviene quando ci si trova a θ=90° cioè in tal
caso questa non è una direzione principale:
LUCIDO 15 e 16 (Ripetizione lezione precedente)
E’ evidente che poiché si è interessati al calcolo delle sollecitazioni che si verificano sul
componente, il problema principale è quello di calcolare il K. Westergaard per il caso della cricca in
una piastra a lunghezza infinita, trova che : dove a è la semilunghezza della cricca e σ
è la tensione all’infinito. Ci si riferisce alla tensione all’infinito poiché questa non può che essere
uniforme su tutto il contorno; mentre la tensione nelle vicinanze della cricca, si è visto, che va da 0
all’infinito avvicinandosi all’apice della cricca. Questa espressione del K, di per se molto semplice,
si è pensato di adattarla ai casi più diversi che si possono verificare di componenti criccati
esprimendola in un’altra forma nota come : , in modo tale da definire β come un
moltiplicatore per il SIF su piastra infinita; cioè rappresenta un coefficiente che moltiplicato per il
SIF su piastra infinita fornisce il SIF del caso che interessa (Cioè dato per il caso in esame, si
ottiene KK dove con K si indica il SIF nel caso di piastra infinita).
Si sottolinea che il SIF definisce il livello di sollecitazione, quindi maggiore è il SIF maggiore è la
sollecitazione a distanza unitaria dalla cricca. Però sostanzialmente il problema non si risolve in
quanto si vuole ricavare il livello di sollecitazione per capire se il componente cede o meno. In
questo caso si dovrebbe affermare che il componente cede sempre, poiché se nelle vicinanze della
cricca la tensione arriva all’infinito allora si dovrebbe concludere che non è possibile la resistenza
di un componente criccato quale che sia l’ampiezza della cricca. Questa affermazione, però, non
può ritenersi vera per la Teoria elasto-plastica; inoltre è noto che i fenomeni fisici nella realtà
assumono una certa continuità; e infine dall’esperienza e dalla pratica (per es. il Tufo, lamiere di
acciaio, ecc. sono materiali in natura di per se criccati) componenti criccati comunque resistono
anche se in maniera peggiore rispetto a componenti non criccati. Evidentemente, in realtà, il
modello è difettoso, ovvero non tiene conto di qualcosa che si sta trascurando, e quindi lo stato
tensionale ottenuto con questo modello si deve combinare con qualche altro effetto che deve
consentire entro certi termini la resistenza del componente. E’chiaro, allora, che c’è bisogno, oltre
dell’indicatore che fornisca il livello di sollecitazione, di un altro indicatore che informi se il
componente resiste o meno. Questo indicatore non fa altro che assumere la forma di un valore
limite del SIF, che viene chiamato TENACITA’. Ottenere questa quantità è molto complicato;
infatti si può anticipare che se il materiale è molto fragile la tenacità esiste e si può definire; se
invece il materiale presenta anche un certo grado di duttilità la tenacità diventa anche funzione dello
spessore, il quale non è presente nel modello prima esposto. Il problema, allora, nel caso di
materiale duttile è che all’aumentare dello spessore la tenacità prima aumenta e poi diminuisce.
Quindi si afferma, per il momento, che esiste un SIF critico che viene chiamato Tenacità, raggiunto
il quale il componente cede. Ovviamente dato che aSIF lo stesso valore di K si può
ottenere o variando a o variando σ, quindi se si identifica in K il valore
della tenacità, si può raggiungere la condizione critica o a lunghezza di
cricca costante aumentando opportunamente la tensione e questo valore
della tensione viene chiamato resistenza residua del componente,
oppure mantenendo costante la sollecitazione allungando la cricca (più
è lunga la cricca più lo stato tensionale è considerevole). Pertanto il
valore di lunghezza della cricca che consente di raggiungere il valore
della tenacità è definito come lunghezza critica della cricca.
4
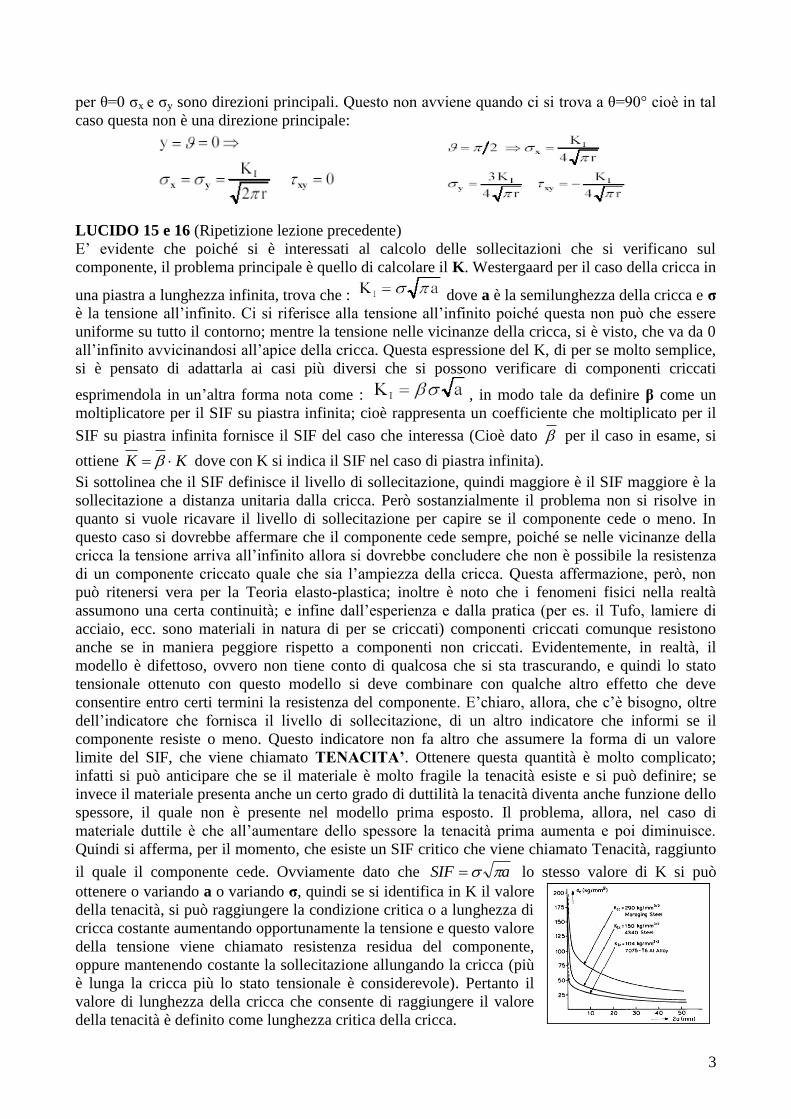
LUCIDO 17 (Ripetizione lezione precedente)
Quindi, per quanto detto prima, si possono costruire delle curve tensione-lunghezza della cricca che
corrispondono ad un K costante; ovviamente queste curve sono parametrizzate con valori di K pari
proprio al valore di tenacità del componente. Nella fig. in esame sono state considerate delle leghe
di alluminio, acciaio ecc. ipotizzando un comportamento a tenacità costante rispetto allo spessore
del componente considerando in particolare uno spessore molto piccolo (o almeno una tenacità
poco variabile con lo spessore).
LUCIDO 18-19-20-21 (Ripetizione lezione precedente)
Una riflessione ulteriore da fare è che, poiché il K o il β rappresenta il livello tensionale che si ha in
un componente per effetto della cricca, è chiaro che ogni sforzo deve essere indirizzato a ricavare il
valore del SIF per tutte le geometrie e le ipotesi di carico possibili.
E’ citato il caso di Feddersen, che ha studiato l’influenza della larghezza della piastra sul
comportamento dello stato tensionale sulla cricca, ed è riportato il caso il cui le cricche su una
piastra sono poste allineate con passo costante. In definitiva sono state costruite delle tabelle con le
quali è possibile ricavare i vari SIF che interessano.
LUCIDO 22 Nella rappresentazione del SIF, di solito, viene privilegiata la forma grafica. Esistono diversi
manuali nei quali si accompagna la forma analitica del SIF con la forma grafica; questi manuali non
sono altro che un antologia di casi studiati dove i risultati sono ottenuti per via analitica o numerica
o per via sperimentale, da cui sono ricavate funzioni che interpolano al meglio questi dati, e che
quindi sono poste con una forma analitica e con un diagramma sui tali manuali.
(Allegati nella parte 9.b questi diagrammi dei casi più comuni)
Nella pratica, però, nella maggior parte delle applicazioni non si riesce a trovare nei manuali a
disposizione il caso che interessa. Pertanto bisogna capire come fare se si presenta un caso che sui
manuali non è presente. Si discute adesso, però, prima dei casi che sono presenti sul manuale:
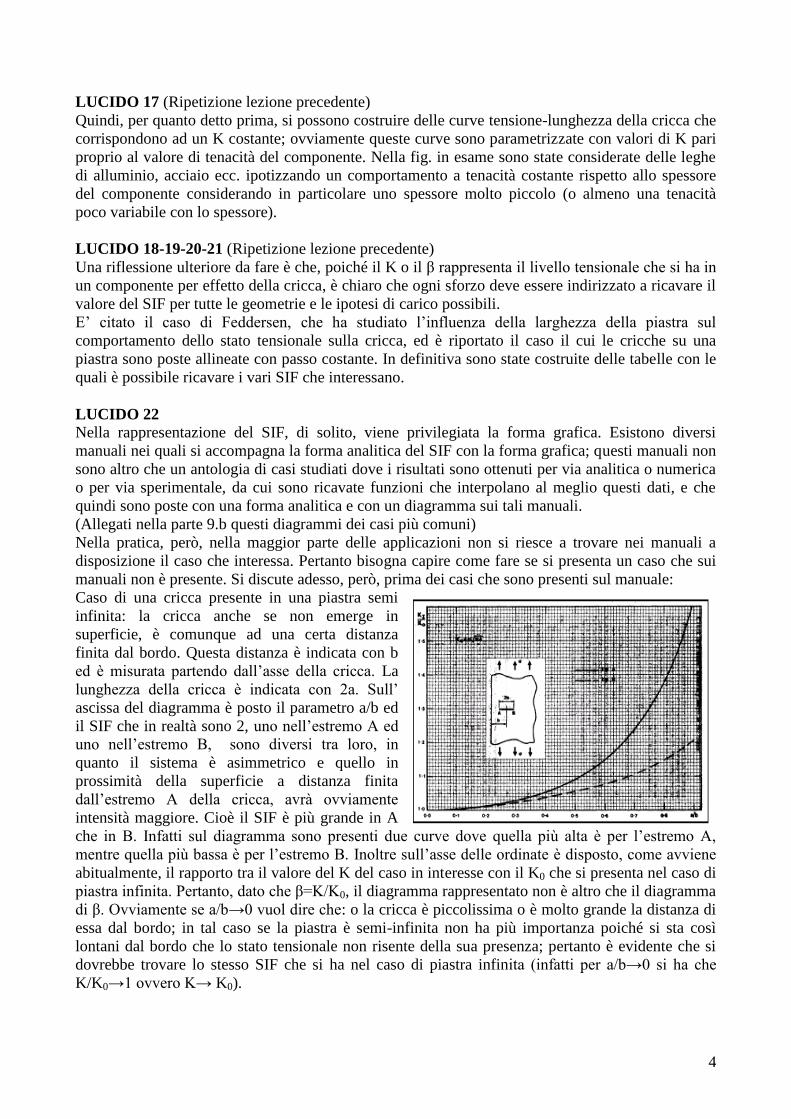
Caso di una cricca presente in una piastra semi
infinita: la cricca anche se non emerge in
superficie, è comunque ad una certa distanza
finita dal bordo. Questa distanza è indicata con b
ed è misurata partendo dall’asse della cricca. La
lunghezza della cricca è indicata con 2a. Sull’
ascissa del diagramma è posto il parametro a/b ed
il SIF che in realtà sono 2, uno nell’estremo A ed
uno nell’estremo B, sono diversi tra loro, in
quanto il sistema è asimmetrico e quello in
prossimità della superficie a distanza finita
dall’estremo A della cricca, avrà ovviamente
intensità maggiore. Cioè il SIF è più grande in A
che in B. Infatti sul diagramma sono presenti due curve dove quella più alta è per l’estremo A,
mentre quella più bassa è per l’estremo B. Inoltre sull’asse delle ordinate è disposto, come avviene
abitualmente, il rapporto tra il valore del K del caso in interesse con il K0 che si presenta nel caso di
piastra infinita. Pertanto, dato che β=K/K0, il diagramma rappresentato non è altro che il diagramma
di β. Ovviamente se a/b→0 vuol dire che: o la cricca è piccolissima o è molto grande la distanza di
essa dal bordo; in tal caso se la piastra è semi-infinita non ha più importanza poiché si sta così
lontani dal bordo che lo stato tensionale non risente della sua presenza; pertanto è evidente che si
dovrebbe trovare lo stesso SIF che si ha nel caso di piastra infinita (infatti per a/b→0 si ha che
K/K0→1 ovvero K→ K0).
5
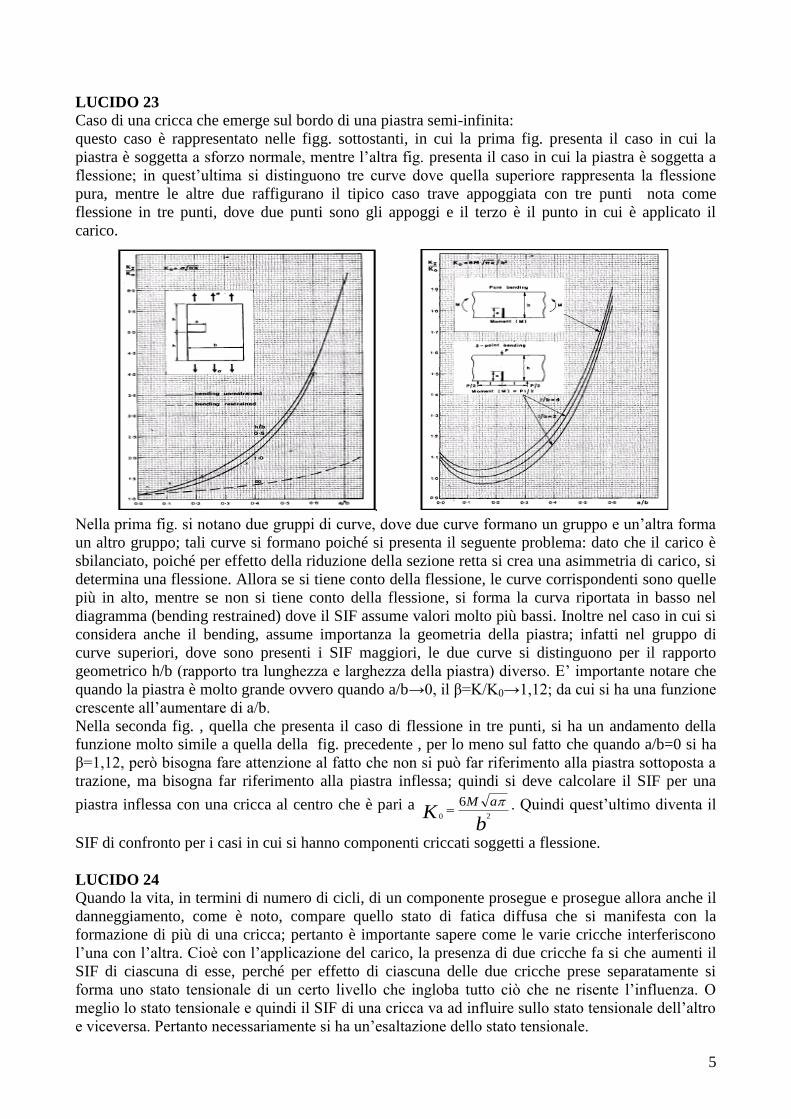
LUCIDO 23 Caso di una cricca che emerge sul bordo di una piastra semi-infinita:
questo caso è rappresentato nelle figg. sottostanti, in cui la prima fig. presenta il caso in cui la
piastra è soggetta a sforzo normale, mentre l’altra fig. presenta il caso in cui la piastra è soggetta a
flessione; in quest’ultima si distinguono tre curve dove quella superiore rappresenta la flessione
pura, mentre le altre due raffigurano il tipico caso trave appoggiata con tre punti nota come
flessione in tre punti, dove due punti sono gli appoggi e il terzo è il punto in cui è applicato il
carico.
Nella prima fig. si notano due gruppi di curve, dove due curve formano un gruppo e un’altra forma
un altro gruppo; tali curve si formano poiché si presenta il seguente problema: dato che il carico è
sbilanciato, poiché per effetto della riduzione della sezione retta si crea una asimmetria di carico, si
determina una flessione. Allora se si tiene conto della flessione, le curve corrispondenti sono quelle
più in alto, mentre se non si tiene conto della flessione, si forma la curva riportata in basso nel
diagramma (bending restrained) dove il SIF assume valori molto più bassi. Inoltre nel caso in cui si
considera anche il bending, assume importanza la geometria della piastra; infatti nel gruppo di
curve superiori, dove sono presenti i SIF maggiori, le due curve si distinguono per il rapporto
geometrico h/b (rapporto tra lunghezza e larghezza della piastra) diverso. E’ importante notare che
quando la piastra è molto grande ovvero quando a/b→0, il β=K/K0→1,12; da cui si ha una funzione
crescente all’aumentare di a/b.
Nella seconda fig. , quella che presenta il caso di flessione in tre punti, si ha un andamento della
funzione molto simile a quella della fig. precedente , per lo meno sul fatto che quando a/b=0 si ha
β=1,12, però bisogna fare attenzione al fatto che non si può far riferimento alla piastra sottoposta a
trazione, ma bisogna far riferimento alla piastra inflessa; quindi si deve calcolare il SIF per una
piastra inflessa con una cricca al centro che è pari a
bK
aM20
6 . Quindi quest’ultimo diventa il
SIF di confronto per i casi in cui si hanno componenti criccati soggetti a flessione.
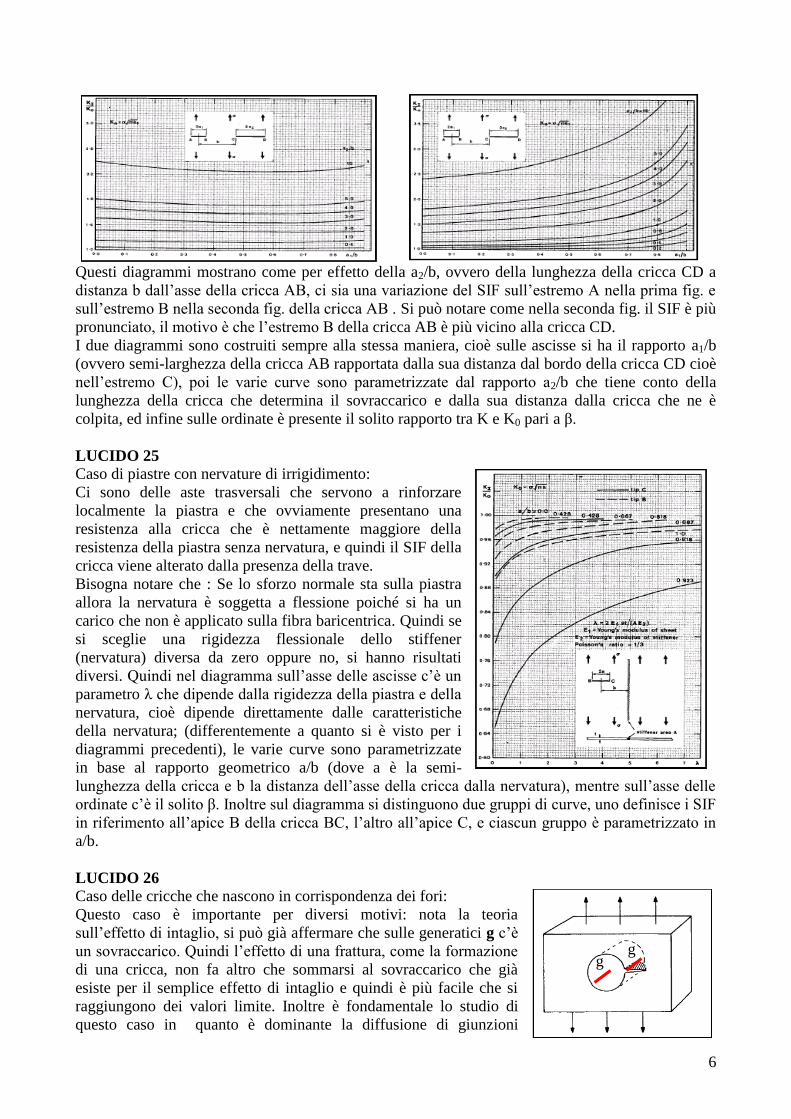
LUCIDO 24 Quando la vita, in termini di numero di cicli, di un componente prosegue e prosegue allora anche il
danneggiamento, come è noto, compare quello stato di fatica diffusa che si manifesta con la
formazione di più di una cricca; pertanto è importante sapere come le varie cricche interferiscono
l’una con l’altra. Cioè con l’applicazione del carico, la presenza di due cricche fa si che aumenti il
SIF di ciascuna di esse, perché per effetto di ciascuna delle due cricche prese separatamente si
forma uno stato tensionale di un certo livello che ingloba tutto ciò che ne risente l’influenza. O
meglio lo stato tensionale e quindi il SIF di una cricca va ad influire sullo stato tensionale dell’altro
e viceversa. Pertanto necessariamente si ha un’esaltazione dello stato tensionale.
6
Questi diagrammi mostrano come per effetto della a2/b, ovvero della lunghezza della cricca CD a
distanza b dall’asse della cricca AB, ci sia una variazione del SIF sull’estremo A nella prima fig. e
sull’estremo B nella seconda fig. della cricca AB . Si può notare come nella seconda fig. il SIF è più
pronunciato, il motivo è che l’estremo B della cricca AB è più vicino alla cricca CD.
I due diagrammi sono costruiti sempre alla stessa maniera, cioè sulle ascisse si ha il rapporto a1/b
(ovvero semi-larghezza della cricca AB rapportata dalla sua distanza dal bordo della cricca CD cioè
nell’estremo C), poi le varie curve sono parametrizzate dal rapporto a2/b che tiene conto della
lunghezza della cricca che determina il sovraccarico e dalla sua distanza dalla cricca che ne è
colpita, ed infine sulle ordinate è presente il solito rapporto tra K e K0 pari a β.
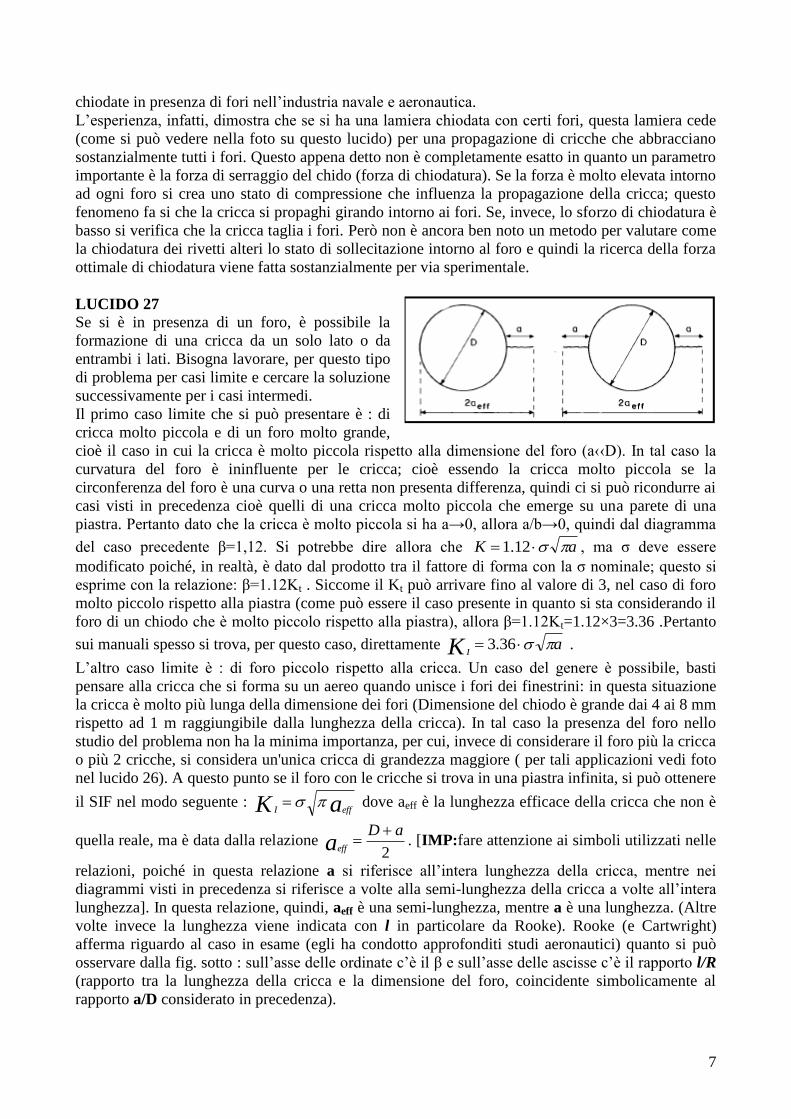
LUCIDO 25
Caso di piastre con nervature di irrigidimento:
Ci sono delle aste trasversali che servono a rinforzare
localmente la piastra e che ovviamente presentano una
resistenza alla cricca che è nettamente maggiore della
resistenza della piastra senza nervatura, e quindi il SIF della
cricca viene alterato dalla presenza della trave.
Bisogna notare che : Se lo sforzo normale sta sulla piastra
allora la nervatura è soggetta a flessione poiché si ha un
carico che non è applicato sulla fibra baricentrica. Quindi se
si sceglie una rigidezza flessionale dello stiffener
(nervatura) diversa da zero oppure no, si hanno risultati
diversi. Quindi nel diagramma sull’asse delle ascisse c’è un
parametro λ che dipende dalla rigidezza della piastra e della
nervatura, cioè dipende direttamente dalle caratteristiche
della nervatura; (differentemente a quanto si è visto per i
diagrammi precedenti), le varie curve sono parametrizzate
in base al rapporto geometrico a/b (dove a è la semi-
lunghezza della cricca e b la distanza dell’asse della cricca dalla nervatura), mentre sull’asse delle
ordinate c’è il solito β. Inoltre sul diagramma si distinguono due gruppi di curve, uno definisce i SIF
in riferimento all’apice B della cricca BC, l’altro all’apice C, e ciascun gruppo è parametrizzato in
a/b.
LUCIDO 26 Caso delle cricche che nascono in corrispondenza dei fori:
Questo caso è importante per diversi motivi: nota la teoria
sull’effetto di intaglio, si può già affermare che sulle generatici g c’è
un sovraccarico. Quindi l’effetto di una frattura, come la formazione
di una cricca, non fa altro che sommarsi al sovraccarico che già
esiste per il semplice effetto di intaglio e quindi è più facile che si
raggiungono dei valori limite. Inoltre è fondamentale lo studio di
questo caso in quanto è dominante la diffusione di giunzioni
g g
7
chiodate in presenza di fori nell’industria navale e aeronautica.
L’esperienza, infatti, dimostra che se si ha una lamiera chiodata con certi fori, questa lamiera cede
(come si può vedere nella foto su questo lucido) per una propagazione di cricche che abbracciano
sostanzialmente tutti i fori. Questo appena detto non è completamente esatto in quanto un parametro
importante è la forza di serraggio del chido (forza di chiodatura). Se la forza è molto elevata intorno
ad ogni foro si crea uno stato di compressione che influenza la propagazione della cricca; questo
fenomeno fa si che la cricca si propaghi girando intorno ai fori. Se, invece, lo sforzo di chiodatura è
basso si verifica che la cricca taglia i fori. Però non è ancora ben noto un metodo per valutare come
la chiodatura dei rivetti alteri lo stato di sollecitazione intorno al foro e quindi la ricerca della forza
ottimale di chiodatura viene fatta sostanzialmente per via sperimentale.
LUCIDO 27 Se si è in presenza di un foro, è possibile la
formazione di una cricca da un solo lato o da
entrambi i lati. Bisogna lavorare, per questo tipo
di problema per casi limite e cercare la soluzione
successivamente per i casi intermedi.
Il primo caso limite che si può presentare è : di
cricca molto piccola e di un foro molto grande,
cioè il caso in cui la cricca è molto piccola rispetto alla dimensione del foro (a‹‹D). In tal caso la
curvatura del foro è ininfluente per le cricca; cioè essendo la cricca molto piccola se la
circonferenza del foro è una curva o una retta non presenta differenza, quindi ci si può ricondurre ai
casi visti in precedenza cioè quelli di una cricca molto piccola che emerge su una parete di una
piastra. Pertanto dato che la cricca è molto piccola si ha a→0, allora a/b→0, quindi dal diagramma
del caso precedente β=1,12. Si potrebbe dire allora che aK 12.1 , ma σ deve essere
modificato poiché, in realtà, è dato dal prodotto tra il fattore di forma con la σ nominale; questo si
esprime con la relazione: β=1.12Kt . Siccome il Kt può arrivare fino al valore di 3, nel caso di foro
molto piccolo rispetto alla piastra (come può essere il caso presente in quanto si sta considerando il
foro di un chiodo che è molto piccolo rispetto alla piastra), allora β=1.12Kt=1.12×3=3.36 .Pertanto
sui manuali spesso si trova, per questo caso, direttamente aK I 36.3 .
L’altro caso limite è : di foro piccolo rispetto alla cricca. Un caso del genere è possibile, basti
pensare alla cricca che si forma su un aereo quando unisce i fori dei finestrini: in questa situazione
la cricca è molto più lunga della dimensione dei fori (Dimensione del chiodo è grande dai 4 ai 8 mm
rispetto ad 1 m raggiungibile dalla lunghezza della cricca). In tal caso la presenza del foro nello
studio del problema non ha la minima importanza, per cui, invece di considerare il foro più la cricca
o più 2 cricche, si considera un'unica cricca di grandezza maggiore ( per tali applicazioni vedi foto
nel lucido 26). A questo punto se il foro con le cricche si trova in una piastra infinita, si può ottenere
il SIF nel modo seguente : aK effI dove aeff è la lunghezza efficace della cricca che non è
quella reale, ma è data dalla relazione 2
aDaeff
. [IMP:fare attenzione ai simboli utilizzati nelle
relazioni, poiché in questa relazione a si riferisce all’intera lunghezza della cricca, mentre nei
diagrammi visti in precedenza si riferisce a volte alla semi-lunghezza della cricca a volte all’intera
lunghezza]. In questa relazione, quindi, aeff è una semi-lunghezza, mentre a è una lunghezza. (Altre
volte invece la lunghezza viene indicata con l in particolare da Rooke). Rooke (e Cartwright)
afferma riguardo al caso in esame (egli ha condotto approfonditi studi aeronautici) quanto si può
osservare dalla fig. sotto : sull’asse delle ordinate c’è il β e sull’asse delle ascisse c’è il rapporto l/R
(rapporto tra la lunghezza della cricca e la dimensione del foro, coincidente simbolicamente al
rapporto a/D considerato in precedenza).
8
Si nota come in un primo tratto, ovvero per bassi
valori di l/R, il β sia indipendente dalla cricca ed è
pari a 3.36 (al variare della lunghezza della cricca
ovvero di l/R si ha che β resta costante e pari a 3.36),
poi in un secondo tratto si presenta una variazione di
β ottenuto confrontando il valore di K=3.36 con il K
ottenuto sostituendo il valore di 2
aDaeff
(noto
il valore di l ed R) nella relazione aK effI ,
ottenendo una curva di β dipendente dalla lunghezza
della cricca. Questi due tratti sono ovviamente ottenuti intersecando le due curve : la prima
indipendente dalla lunghezza della cricca a β=cost=3,36 , la seconda con β dipendente dalla
lunghezza della cricca valuta come descritto prima. Quindi sulla sinistra del diagramma e del punto
di intersezione vale la prima curva, sulla destra la seconda. Poi i vari casi intermedi tra la due curve
sono ottenuti numericamente, arrivando ad una soluzione che si avvicina molto a quella analitica.
LUCIDO 28 In realtà Rooke è stato preceduto da un altro studioso noto come Bowie, il quale nel suo lavoro non
ha considerato il caso di cricca molto piccola, ma ha sistematicamente preso il sistema cricca+foro e
lo ha trasformato in una cricca equivalente; in questa maniera al variare del rapporto a/D ha ottenuto
una curva di risposta :
in termini di SIF, che poi ha confrontato con soluzioni di
tipo numerico verificando che sia nel caso di una cricca
che nel caso di due cricche, sostanzialmente, lo scarto è
assolutamente accettabile. Quanto appena detto si può
osservare nel diagramma accanto.
Il diagramma sottostante, invece, è molto complesso in
quanto prevede anche lo studio della propagazione delle
cricche che sarà spiegato in seguito. In tale diagramma si
può osservare la curva di propagazione di una cricca in un
provino normale, cioè senza
particolari geometrie (curva A); poi le
altre 5 curve accanto si riferiscono
alla propagazione di una cricca che
inizialmente è una cricca che sta sui
due lati di un foro di varie dimensioni
(5,10,20,30,40mm differenziando le
varie curve). Si può osservare che
ponendo queste curve sullo stesso
diagramma come quello in esame,
queste curve si sovrappongono e si
confondono con la curva che non
presenta fori, cioè con la curva A, in
corrispondenza delle ordinate che
presentano lunghezza della cricca
nulla coincidendo proprio con il diametro del foro. Diagrammi del genere dimostrano che c’è una
corrispondenza accettabile tra le due teorie (di Rooke e Bowie) e che ognuna possa essere
giustificata dall’altra.
A
9
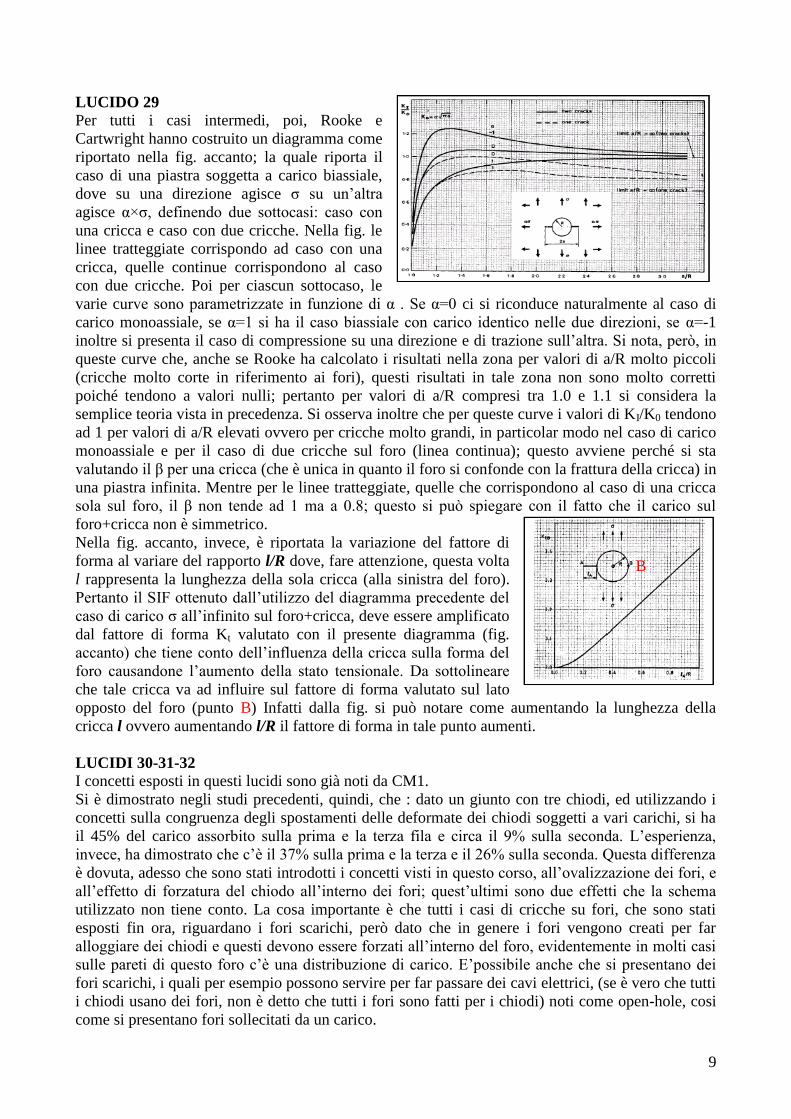
LUCIDO 29 Per tutti i casi intermedi, poi, Rooke e
Cartwright hanno costruito un diagramma come
riportato nella fig. accanto; la quale riporta il
caso di una piastra soggetta a carico biassiale,
dove su una direzione agisce σ su un’altra
agisce α×σ, definendo due sottocasi: caso con
una cricca e caso con due cricche. Nella fig. le
linee tratteggiate corrispondo ad caso con una
cricca, quelle continue corrispondono al caso
con due cricche. Poi per ciascun sottocaso, le
varie curve sono parametrizzate in funzione di α . Se α=0 ci si riconduce naturalmente al caso di
carico monoassiale, se α=1 si ha il caso biassiale con carico identico nelle due direzioni, se α=-1
inoltre si presenta il caso di compressione su una direzione e di trazione sull’altra. Si nota, però, in
queste curve che, anche se Rooke ha calcolato i risultati nella zona per valori di a/R molto piccoli
(cricche molto corte in riferimento ai fori), questi risultati in tale zona non sono molto corretti
poiché tendono a valori nulli; pertanto per valori di a/R compresi tra 1.0 e 1.1 si considera la
semplice teoria vista in precedenza. Si osserva inoltre che per queste curve i valori di KI/K0 tendono
ad 1 per valori di a/R elevati ovvero per cricche molto grandi, in particolar modo nel caso di carico
monoassiale e per il caso di due cricche sul foro (linea continua); questo avviene perché si sta
valutando il β per una cricca (che è unica in quanto il foro si confonde con la frattura della cricca) in
una piastra infinita. Mentre per le linee tratteggiate, quelle che corrispondono al caso di una cricca
sola sul foro, il β non tende ad 1 ma a 0.8; questo si può spiegare con il fatto che il carico sul
foro+cricca non è simmetrico.
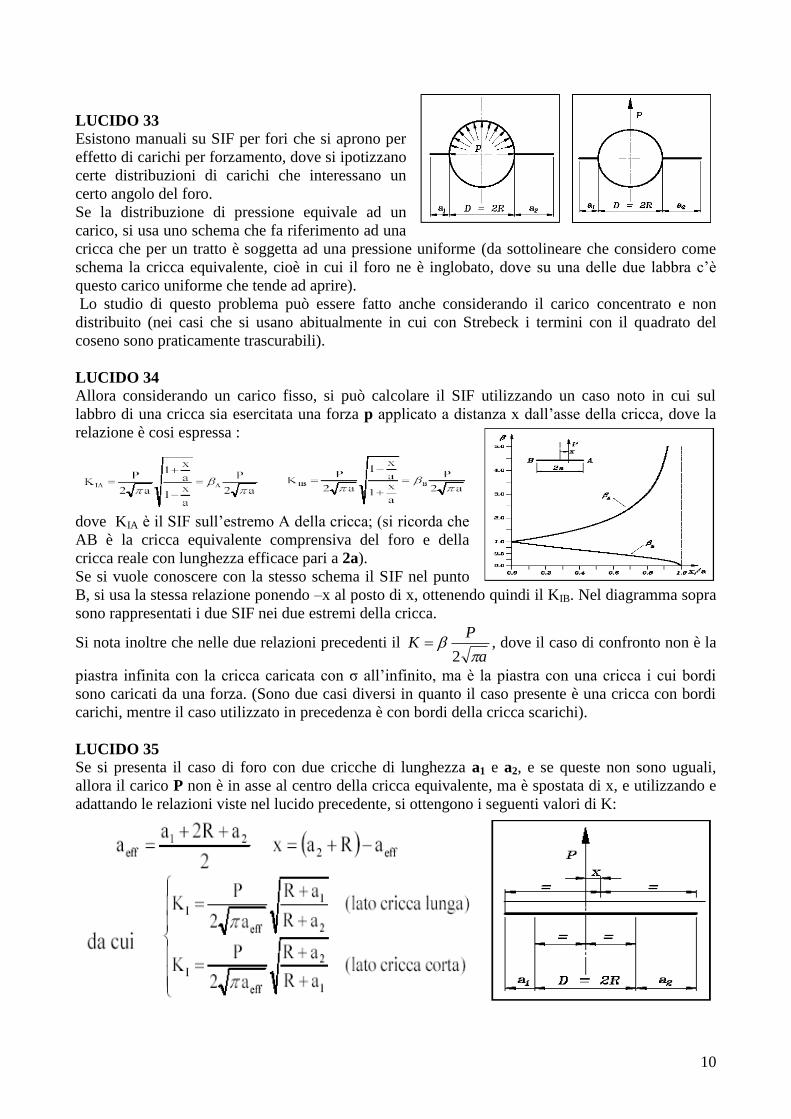
Nella fig. accanto, invece, è riportata la variazione del fattore di
forma al variare del rapporto l/R dove, fare attenzione, questa volta
l rappresenta la lunghezza della sola cricca (alla sinistra del foro).
Pertanto il SIF ottenuto dall’utilizzo del diagramma precedente del
caso di carico σ all’infinito sul foro+cricca, deve essere amplificato
dal fattore di forma Kt valutato con il presente diagramma (fig.
accanto) che tiene conto dell’influenza della cricca sulla forma del
foro causandone l’aumento della stato tensionale. Da sottolineare
che tale cricca va ad influire sul fattore di forma valutato sul lato
opposto del foro (punto B) Infatti dalla fig. si può notare come aumentando la lunghezza della
cricca l ovvero aumentando l/R il fattore di forma in tale punto aumenti.
LUCIDI 30-31-32
I concetti esposti in questi lucidi sono già noti da CM1.
Si è dimostrato negli studi precedenti, quindi, che : dato un giunto con tre chiodi, ed utilizzando i
concetti sulla congruenza degli spostamenti delle deformate dei chiodi soggetti a vari carichi, si ha
il 45% del carico assorbito sulla prima e la terza fila e circa il 9% sulla seconda. L’esperienza,
invece, ha dimostrato che c’è il 37% sulla prima e la terza e il 26% sulla seconda. Questa differenza
è dovuta, adesso che sono stati introdotti i concetti visti in questo corso, all’ovalizzazione dei fori, e
all’effetto di forzatura del chiodo all’interno dei fori; quest’ultimi sono due effetti che la schema
utilizzato non tiene conto. La cosa importante è che tutti i casi di cricche su fori, che sono stati
esposti fin ora, riguardano i fori scarichi, però dato che in genere i fori vengono creati per far
alloggiare dei chiodi e questi devono essere forzati all’interno del foro, evidentemente in molti casi
sulle pareti di questo foro c’è una distribuzione di carico. E’possibile anche che si presentano dei
fori scarichi, i quali per esempio possono servire per far passare dei cavi elettrici, (se è vero che tutti
i chiodi usano dei fori, non è detto che tutti i fori sono fatti per i chiodi) noti come open-hole, cosi
come si presentano fori sollecitati da un carico.
B
10
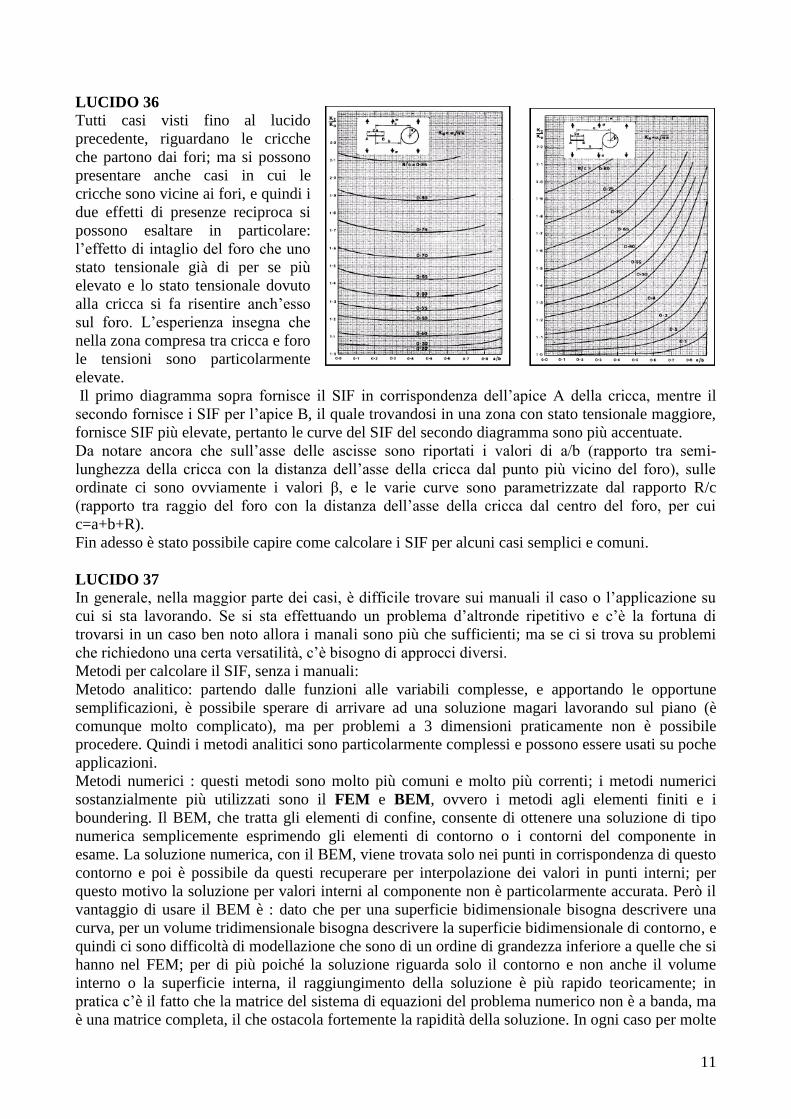
LUCIDO 33
Esistono manuali su SIF per fori che si aprono per
effetto di carichi per forzamento, dove si ipotizzano
certe distribuzioni di carichi che interessano un
certo angolo del foro.
Se la distribuzione di pressione equivale ad un
carico, si usa uno schema che fa riferimento ad una
cricca che per un tratto è soggetta ad una pressione uniforme (da sottolineare che considero come
schema la cricca equivalente, cioè in cui il foro ne è inglobato, dove su una delle due labbra c’è
questo carico uniforme che tende ad aprire).
Lo studio di questo problema può essere fatto anche considerando il carico concentrato e non
distribuito (nei casi che si usano abitualmente in cui con Strebeck i termini con il quadrato del
coseno sono praticamente trascurabili).
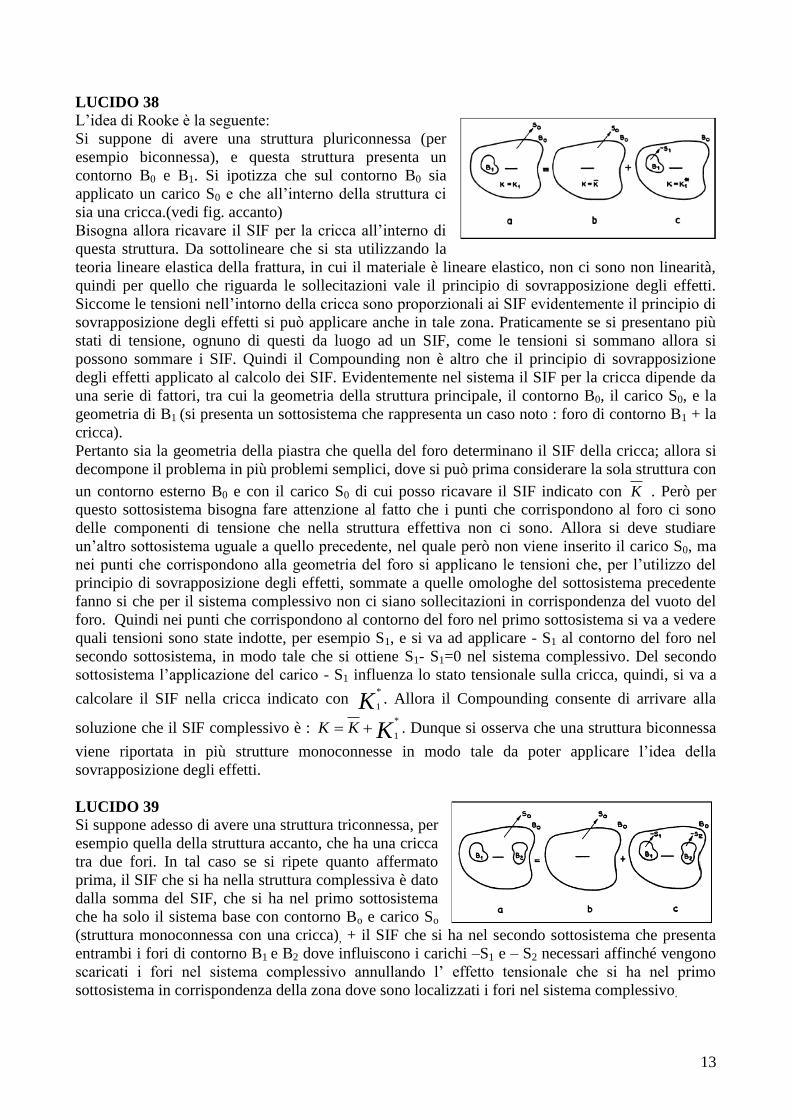
LUCIDO 34 Allora considerando un carico fisso, si può calcolare il SIF utilizzando un caso noto in cui sul
labbro di una cricca sia esercitata una forza p applicato a distanza x dall’asse della cricca, dove la
relazione è cosi espressa :
dove KIA è il SIF sull’estremo A della cricca; (si ricorda che
AB è la cricca equivalente comprensiva del foro e della
cricca reale con lunghezza efficace pari a 2a).
Se si vuole conoscere con la stesso schema il SIF nel punto
B, si usa la stessa relazione ponendo –x al posto di x, ottenendo quindi il KIB. Nel diagramma sopra
sono rappresentati i due SIF nei due estremi della cricca.
Si nota inoltre che nelle due relazioni precedenti il a
PK
2 , dove il caso di confronto non è la
piastra infinita con la cricca caricata con σ all’infinito, ma è la piastra con una cricca i cui bordi
sono caricati da una forza. (Sono due casi diversi in quanto il caso presente è una cricca con bordi
carichi, mentre il caso utilizzato in precedenza è con bordi della cricca scarichi).
LUCIDO 35 Se si presenta il caso di foro con due cricche di lunghezza a1 e a2, e se queste non sono uguali,
allora il carico P non è in asse al centro della cricca equivalente, ma è spostata di x, e utilizzando e
adattando le relazioni viste nel lucido precedente, si ottengono i seguenti valori di K:
11
LUCIDO 36 Tutti casi visti fino al lucido
precedente, riguardano le cricche
che partono dai fori; ma si possono
presentare anche casi in cui le
cricche sono vicine ai fori, e quindi i
due effetti di presenze reciproca si
possono esaltare in particolare:
l’effetto di intaglio del foro che uno
stato tensionale già di per se più
elevato e lo stato tensionale dovuto
alla cricca si fa risentire anch’esso
sul foro. L’esperienza insegna che
nella zona compresa tra cricca e foro
le tensioni sono particolarmente
elevate.
Il primo diagramma sopra fornisce il SIF in corrispondenza dell’apice A della cricca, mentre il
secondo fornisce i SIF per l’apice B, il quale trovandosi in una zona con stato tensionale maggiore,
fornisce SIF più elevate, pertanto le curve del SIF del secondo diagramma sono più accentuate.
Da notare ancora che sull’asse delle ascisse sono riportati i valori di a/b (rapporto tra semi-
lunghezza della cricca con la distanza dell’asse della cricca dal punto più vicino del foro), sulle
ordinate ci sono ovviamente i valori β, e le varie curve sono parametrizzate dal rapporto R/c
(rapporto tra raggio del foro con la distanza dell’asse della cricca dal centro del foro, per cui
c=a+b+R).
Fin adesso è stato possibile capire come calcolare i SIF per alcuni casi semplici e comuni.
LUCIDO 37 In generale, nella maggior parte dei casi, è difficile trovare sui manuali il caso o l’applicazione su
cui si sta lavorando. Se si sta effettuando un problema d’altronde ripetitivo e c’è la fortuna di
trovarsi in un caso ben noto allora i manali sono più che sufficienti; ma se ci si trova su problemi
che richiedono una certa versatilità, c’è bisogno di approcci diversi.
Metodi per calcolare il SIF, senza i manuali:
Metodo analitico: partendo dalle funzioni alle variabili complesse, e apportando le opportune
semplificazioni, è possibile sperare di arrivare ad una soluzione magari lavorando sul piano (è
comunque molto complicato), ma per problemi a 3 dimensioni praticamente non è possibile
procedere. Quindi i metodi analitici sono particolarmente complessi e possono essere usati su poche
applicazioni.
Metodi numerici : questi metodi sono molto più comuni e molto più correnti; i metodi numerici
sostanzialmente più utilizzati sono il FEM e BEM, ovvero i metodi agli elementi finiti e i
boundering. Il BEM, che tratta gli elementi di confine, consente di ottenere una soluzione di tipo
numerica semplicemente esprimendo gli elementi di contorno o i contorni del componente in
esame. La soluzione numerica, con il BEM, viene trovata solo nei punti in corrispondenza di questo
contorno e poi è possibile da questi recuperare per interpolazione dei valori in punti interni; per
questo motivo la soluzione per valori interni al componente non è particolarmente accurata. Però il
vantaggio di usare il BEM è : dato che per una superficie bidimensionale bisogna descrivere una
curva, per un volume tridimensionale bisogna descrivere la superficie bidimensionale di contorno, e
quindi ci sono difficoltà di modellazione che sono di un ordine di grandezza inferiore a quelle che si
hanno nel FEM; per di più poiché la soluzione riguarda solo il contorno e non anche il volume
interno o la superficie interna, il raggiungimento della soluzione è più rapido teoricamente; in
pratica c’è il fatto che la matrice del sistema di equazioni del problema numerico non è a banda, ma
è una matrice completa, il che ostacola fortemente la rapidità della soluzione. In ogni caso per molte

12
strutture, soprattutto per strutture di riferimento, il BEM è molto più veloce del FEM. Purtroppo il
BEM (si vedrà il NASGRO come codice di calcolo per lo studio della frattura e della propagazione
delle cricche, il quale ha in sé il modulo BEM) ha un grosso ostacolo: per il FEM ci sono a
disposizione una variegata gamma di pre-processing e post-processing e anche molto avanzati,
mentre i pochi programmi BEM commerciali hanno dei pre-processing di modellazione che sono
molto antiquati (sono in ritardo rispetto agli alti modellatori FEM di 25 anni); questo perché
dovendo affrontare con il BEM sistemi più semplici rispetto a quelli del FEM allora risulta inutile
utilizzare pre-processing troppo avanzati.
Il BEM è molto adatto per la meccanica della frattura, e anche per il calcolo a fatica in termini di
propagazione, spesso più adatto del FEM. Per il calcolo del SIF è molto più accurato il FEM, però
questo impiega molto più tempo per il calcolo, anche perché la mesh, in particolar modo nell’apice
della cricca, è molto spinta dove bisogna aumentare il numero di gradi di libertà; il BEM non ha
questo limite in quanto l’infittimento della griglia avviene solo sul contorno che può essere una
linea (mesh monodimensionale) al più una superficie. Quindi nel BEM la mesh è effettuata solo sul
contorno e la soluzione quindi è trovata solo sul contorno e poi tramite una funzione di forma si
ottengono i valori per l’interno.
Esistono, poi, dei metodi numerici indicati come collocazioni, pertubazioni, ecc. che sono più
antichi, ma che comunque possono essere utilizzati. E poi ci sono i metodi numerici più
all’avanguardia che hanno sicuro sviluppo futuro noti come Meshless i quali utilizzano il metodo
agli elementi finiti senza gli elementi, e presentano solo dei punti ai quali corrispondono dei nodi
senza rappresentare la mesh (appunto meshless); a tali nodi si attribuisce una capacità di attrazione
che fa si da legarsi ai nodi circostanti, come una sorta di gravità tra gli elementi. I meshless non
sono tanto adatti per valutare il SIF, ma per studiare la propagazione della frattura. Dei promotori
del meshless affermavano che in effetti i risultati ottenuti nel FEM sono falsi, poiché la soluzione
con il FEM appunto non può che seguire il contorno degli elementi, mentre nel meshless la
soluzione prosegue senza direzioni obbligate (in effetti l’ambiente meshless può essere paragonato
come ambiente all’universo dove le stelle rappresentano i vari nodi, ogni stella ha una zona di
influenza che teoricamente va all’infinito). Ultimamente sono anche diffusi dei strumenti ibridi che
presentano una struttura meshless racchiusa in una struttura agli elementi finiti; questo viene fatto
per rimediare ai punti deboli di ciascuna delle due metodologie; nel meshless il punto debole è nelle
condizioni di vincolo, in quanto imporle in questo metodo è molto complesso (dove si deve
utilizzare per esempio il metodo del moltiplicatore di Lagrange), non tanto per l’applicazione del
carico, ma per l’idea dello spostamento imposto è di difficile attuazione. Siccome questo problema
è di facile risoluzione con il metodo agli elementi finiti, allora si prende la struttura meschless e si
racchiude in uno strato di elementi finiti; quest’ultimo serve per imporre le condizioni al contorno, e
la struttura meschless per risolvere il problema. Uno dei problemi dei nodi della meshless è quando
si presenta la cricca, come un nodo su un labbro della cricca influisce sull’ altro; a tal scopo ci sono
delle funzioni con le quali si riesce ad aggirare la cricca.
Quindi i metodi numerici sono tanti e possono essere usati indifferentemente, con i quali si possono
trovare delle difficoltà che fanno perdere tempo; pertanto si cercano dei metodi più semplici e
rapidi. Tra queste tipologie di calcolo sono note : il Compounding e le Funzioni peso (Weight
functions).
Metodo del Compounding : è stato inventato da Cartwright e portato avanti da Rooke; questo è un
metodo approssimato (così come gli altri), molto rapido, nella maggior parte dei casi molto
semplice e dà ottimi risultati. Sostanzialmente il metodo del Compounding è il metodo della
combinazione, intesa come combinazione, appunto, di SIF che provengono da casi precedenti.
Malgrado tutti i casi e i manuali che si possono ottenere, i casi da risolvere spesso non sono
compresi in questi volumi; ma dal momento che si usa il compounding, si può decomporre il
problema in una serie di sottoproblemi per i quali sui manuali si trova la soluzione, poi
componendoli si ottiene il risultato del problema in esame.
13
LUCIDO 38
L’idea di Rooke è la seguente:
Si suppone di avere una struttura pluriconnessa (per
esempio biconnessa), e questa struttura presenta un
contorno B0 e B1. Si ipotizza che sul contorno B0 sia
applicato un carico S0 e che all’interno della struttura ci
sia una cricca.(vedi fig. accanto)
Bisogna allora ricavare il SIF per la cricca all’interno di
questa struttura. Da sottolineare che si sta utilizzando la
teoria lineare elastica della frattura, in cui il materiale è lineare elastico, non ci sono non linearità,
quindi per quello che riguarda le sollecitazioni vale il principio di sovrapposizione degli effetti.
Siccome le tensioni nell’intorno della cricca sono proporzionali ai SIF evidentemente il principio di
sovrapposizione degli effetti si può applicare anche in tale zona. Praticamente se si presentano più
stati di tensione, ognuno di questi da luogo ad un SIF, come le tensioni si sommano allora si
possono sommare i SIF. Quindi il Compounding non è altro che il principio di sovrapposizione
degli effetti applicato al calcolo dei SIF. Evidentemente nel sistema il SIF per la cricca dipende da
una serie di fattori, tra cui la geometria della struttura principale, il contorno B0, il carico S0, e la
geometria di B1 (si presenta un sottosistema che rappresenta un caso noto : foro di contorno B1 + la
cricca).
Pertanto sia la geometria della piastra che quella del foro determinano il SIF della cricca; allora si
decompone il problema in più problemi semplici, dove si può prima considerare la sola struttura con
un contorno esterno B0 e con il carico S0 di cui posso ricavare il SIF indicato con K . Però per
questo sottosistema bisogna fare attenzione al fatto che i punti che corrispondono al foro ci sono
delle componenti di tensione che nella struttura effettiva non ci sono. Allora si deve studiare
un’altro sottosistema uguale a quello precedente, nel quale però non viene inserito il carico S0, ma
nei punti che corrispondono alla geometria del foro si applicano le tensioni che, per l’utilizzo del
principio di sovrapposizione degli effetti, sommate a quelle omologhe del sottosistema precedente
fanno si che per il sistema complessivo non ci siano sollecitazioni in corrispondenza del vuoto del
foro. Quindi nei punti che corrispondono al contorno del foro nel primo sottosistema si va a vedere
quali tensioni sono state indotte, per esempio S1, e si va ad applicare - S1 al contorno del foro nel
secondo sottosistema, in modo tale che si ottiene S1- S1=0 nel sistema complessivo. Del secondo
sottosistema l’applicazione del carico - S1 influenza lo stato tensionale sulla cricca, quindi, si va a
calcolare il SIF nella cricca indicato con K*
1. Allora il Compounding consente di arrivare alla
soluzione che il SIF complessivo è : KKK*
1 . Dunque si osserva che una struttura biconnessa
viene riportata in più strutture monoconnesse in modo tale da poter applicare l’idea della
sovrapposizione degli effetti.
LUCIDO 39
Si suppone adesso di avere una struttura triconnessa, per
esempio quella della struttura accanto, che ha una cricca
tra due fori. In tal caso se si ripete quanto affermato
prima, il SIF che si ha nella struttura complessiva è dato
dalla somma del SIF, che si ha nel primo sottosistema
che ha solo il sistema base con contorno Bo e carico So
(struttura monoconnessa con una cricca), + il SIF che si ha nel secondo sottosistema che presenta
entrambi i fori di contorno B1 e B2 dove influiscono i carichi –S1 e – S2 necessari affinché vengono
scaricati i fori nel sistema complessivo annullando l’ effetto tensionale che si ha nel primo
sottosistema in corrispondenza della zona dove sono localizzati i fori nel sistema complessivo.
14
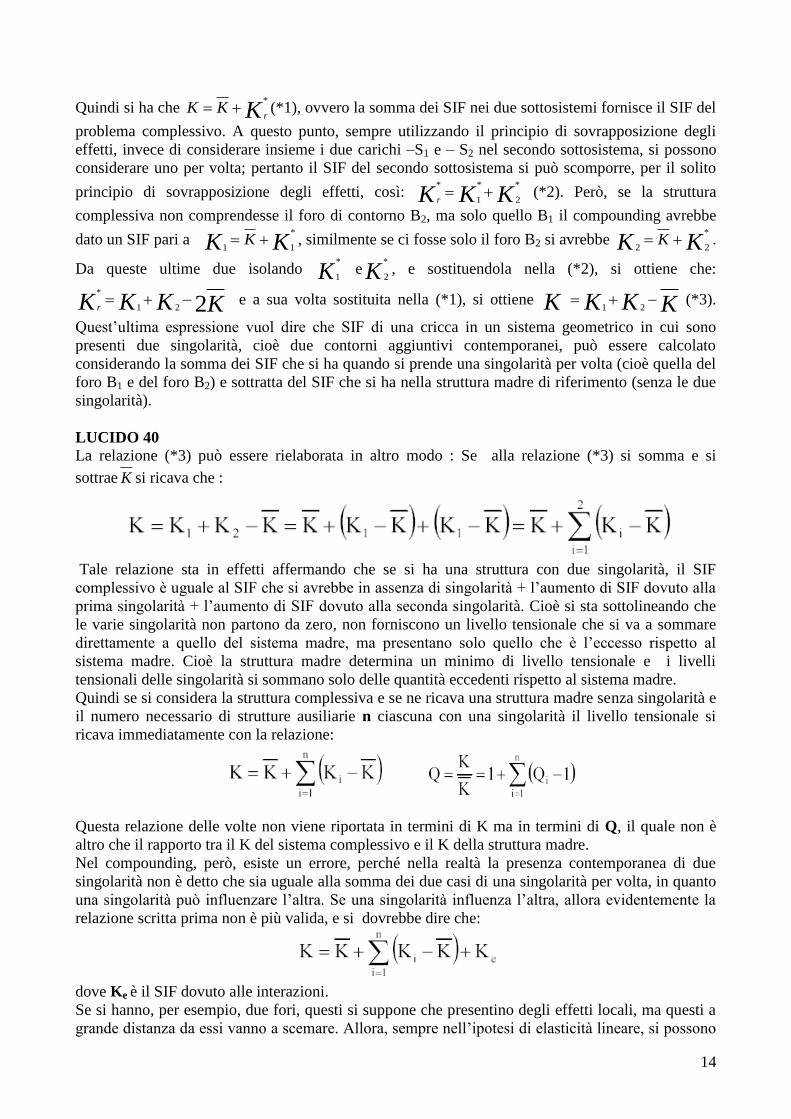
Quindi si ha che K rKK
* (*1), ovvero la somma dei SIF nei due sottosistemi fornisce il SIF del
problema complessivo. A questo punto, sempre utilizzando il principio di sovrapposizione degli
effetti, invece di considerare insieme i due carichi –S1 e – S2 nel secondo sottosistema, si possono
considerare uno per volta; pertanto il SIF del secondo sottosistema si può scomporre, per il solito
principio di sovrapposizione degli effetti, così: KKK r
*
2
*
1
* (*2). Però, se la struttura
complessiva non comprendesse il foro di contorno B2, ma solo quello B1 il compounding avrebbe
dato un SIF pari a KK K*
11 , similmente se ci fosse solo il foro B2 si avrebbe KK K
*
22 .
Da queste ultime due isolando K*
1 e K
*
2, e sostituendola nella (*2), si ottiene che:
KKKK r 221
* e a sua volta sostituita nella (*1), si ottiene KKKK
21(*3).
Quest’ultima espressione vuol dire che SIF di una cricca in un sistema geometrico in cui sono
presenti due singolarità, cioè due contorni aggiuntivi contemporanei, può essere calcolato
considerando la somma dei SIF che si ha quando si prende una singolarità per volta (cioè quella del
foro B1 e del foro B2) e sottratta del SIF che si ha nella struttura madre di riferimento (senza le due
singolarità).
LUCIDO 40
La relazione (*3) può essere rielaborata in altro modo : Se alla relazione (*3) si somma e si
sottrae K si ricava che :
Tale relazione sta in effetti affermando che se si ha una struttura con due singolarità, il SIF
complessivo è uguale al SIF che si avrebbe in assenza di singolarità + l’aumento di SIF dovuto alla
prima singolarità + l’aumento di SIF dovuto alla seconda singolarità. Cioè si sta sottolineando che
le varie singolarità non partono da zero, non forniscono un livello tensionale che si va a sommare
direttamente a quello del sistema madre, ma presentano solo quello che è l’eccesso rispetto al
sistema madre. Cioè la struttura madre determina un minimo di livello tensionale e i livelli
tensionali delle singolarità si sommano solo delle quantità eccedenti rispetto al sistema madre.
Quindi se si considera la struttura complessiva e se ne ricava una struttura madre senza singolarità e
il numero necessario di strutture ausiliarie n ciascuna con una singolarità il livello tensionale si
ricava immediatamente con la relazione:
Questa relazione delle volte non viene riportata in termini di K ma in termini di Q, il quale non è
altro che il rapporto tra il K del sistema complessivo e il K della struttura madre.
Nel compounding, però, esiste un errore, perché nella realtà la presenza contemporanea di due
singolarità non è detto che sia uguale alla somma dei due casi di una singolarità per volta, in quanto
una singolarità può influenzare l’altra. Se una singolarità influenza l’altra, allora evidentemente la
relazione scritta prima non è più valida, e si dovrebbe dire che:
dove Ke è il SIF dovuto alle interazioni.
Se si hanno, per esempio, due fori, questi si suppone che presentino degli effetti locali, ma questi a
grande distanza da essi vanno a scemare. Allora, sempre nell’ipotesi di elasticità lineare, si possono

15
avere due fori molto lontani tale che i campi di sollecitazione di ciascuno di essi apprezzabilmente
non si intersecano, e quindi si può considerare ogni foro separatamente. Se i fori sono più vicini la
tensione nel punto intermedio risente sia dell’uno che dell’altro, e quindi c’è interferenza tra di essi.
Se questi fori sono molto lontani e al centro di essi c’è una cricca, si può affermare che i campi
tensionali non si intersecano, però allo stesso tempo la cricca al centro risente sia dell’uno che
dell’altro. Mentre l’altro caso, sempre con la cricca al centro dei fori, ma i fori sono abbastanza
vicini, allora i campi tensionali interferiscono tra loro e quindi i SIF sulla cricca aumentano
ulteriormente. Pertanto nel caso di fori molto lontani il termine Ke non si considera o meglio si può
trascurare; viceversa se i fori sono molto vicini tali da interferire tra loro, nella relazione del K deve
intervenire anche il temine aggiuntivo Ke. Tale termine aggiuntivo fa cadere l’efficacia del metodo
del compounding, perché non c’è nessun modo per poterselo calcolare se non utilizzare il metodo
agli elementi finiti e recuperarlo, quindi, a posteriori. Allora il compounding da dei risultati tanto
più accurati quanto più piccoli sono i termini Ke, cioè quanto minori sono le interferenze reciproche
che sussistono tra le diverse singolarità. Se si hanno delle singolarità che interferiscono poco, allora
il metodo del compounding va bene, altrimenti se ci sono singolarità che interferiscono molto tra
loro allora ci sono forti problemi per il suo utilizzo.
LUCIDO 41
Si riporta qualche esempio:
1° Esempio
La piastra a ha evidentemente SIF nullo perché non c’è la
cricca. Però dal punto di vista tensionale la piastra b è
equivalente alla piastra a; dove la struttura b è sottoposta ad
una tensione σ di trazione sulla piastra e da un carico – σ di
compressione di chiusura sui bordi della cricca; quindi anche
questa deve avere il SIF nullo. La struttura b può essere considerata come la somma di due strutture
d , e con la medesima geometria, dove la d presenta la piastra caricata con σ all’infinito e la cricca
scarica, mentre la e presenta la piastra scarica ma la cricca è caricata con – σ.
Allora il SIF di d sommato a quello di e deve essere pari a quello di b che è ovviamente nullo; cioè
Ka=Kb=Kd+Ke=0 da cui Ke=-Kd. Dato che aK d , allora aK e
. Se si inverte la σ
sulla cricca nella struttura e, e la si chiama p si ottiene il caso di una cricca soggetta a carico di
apertura in cui il SIF è pari a apK e .
2°Esempio
Si ha una piastra a assoggettata da un carico all’infinito
solo su un verso della piastra; tale carico è bilanciato da un
perno il quale presenta una reazione P=σW (dove W è
ovviamente la larghezza della piastra). Scomponendo
questa struttura, la struttura madre è, quindi, la piastra
soggetta a carico simmetrico (ad ambo i lati) all’infinito e
con una cricca al centro. Le altre due strutture d ed e
dispongono carichi P sulla cricca tali che sommati o sottratti opportunamente alla struttura madre
dia quella complessiva. La struttura d è scarica all’infinito ed è carica solo sulla cricca con due
carichi P che si equilibrano; mentre sulla struttura e, che va a sottrarsi alle precedenti d e b, mostra
il carico all’infinito sul lato opposto in cui è presente il carico all’infinito σ nella struttura a di
partenza, e la reazione P di nuovo opposta a quella disposta nella struttura a (cioè si nota che la
struttura e è opposta a quella iniziale a). Allora in generale Ka=Kb+Kd-Ke ovvero Ka+Ke=Kb+Kd,
ma dato che Ka=Ke si ha KKK dba
2
1. Dato che per le piastre b , d si possono avere SIF dai
manuali e sostituendoli nella precedente si ottiene Ka :

16
LUCIDO 42
3°Esempio
Si ha non una piastra infinita, ma una striscia di lamiera, nella quale in
maniera eccentrica (cioè è fuori dal centro ovvero non è sull’asse) c’è
un foro in cui è presente anche una cricca.
Quindi si ha questo foro con cricca a distanza b-1 e b+1 dai due
boundering (confini) B-1 e B+1, e inoltre la piastra è caricata da una
tensione all’infinito.
Questa volta bisogna fare degli artifizi non sui carichi,
ma sul contorno; allora come struttura madre si
considera solo il foro + cricca in una piastra infinita,
poi si considera la cricca equivalente vicino al
contorno di destra e infine la struttura con la cricca
equivalente vicino al contorno di sinistra. Pertanto si è
sempre preso una singolarità per volta.
Dai dati forniti, la lunghezza della cricca effettiva è
l=6mm, il raggio del foro è R=5mm, quindi la
lunghezza della cricca è aeff=a’=(2R+l)/2=(2*5+6)/2=8mm. Poi la larghezza della piastra è
b=32mm, la distanza del centro del foro dal bordo destro è b+1=15mm, mentre dal bordo sinistro è
b-1=17mm. Allora fissata la distanza dell’estremo destro della cricca (pari a 4mm) dal bordo destro
della piastra, la crcca + foro passando a cricca equivalente ha modificato la distanza del centro del
foro dal bordo destro b+1 nella distanza del centro della cricca equivalente dal bordo del foro b’+1.
Quindi dato che la differenza (vedi fig.) a-a’=R+l-a’=5+6-8=3mm , vuol dire che il centro della
cricca equivalente ha subito uno spostamento di 3mm a destra; pertanto le nuove distanza dai bordi
sono b’-1=b-1+3=20mm e b’+1=b+1-3=12mm.
Allora bisogna studiare le tre strutture: la struttura che ha una cricca pari a 2a’=16mm in una piastra
infinita (A), un’altra che ha una cricca di 16mm con il solo bordo a destra a distanza 12mm dal
centro della cricca (B), e una terza struttura che ha una cricca di 116mm a distanza 20mm con il
solo bordo di sinistra distante 20mm dal centro della cricca (C).
Quindi A) per il foro nella piastra infinita :
dove si nota che c’è, nel calcolo del SIF, un coefficiente 1.0, poiché da Rooke si possono usare le
curve dalle quali entrando con un rapporto geometrico aeff/R=8/5=1.6 si ottiene un β=1.0 (vedi
per le curve nel lucido 29).
Poi con B) per la cricca rispetto la bordo di destra:
dove entrando con aeff/b’+1=8/12=0.66 nell’opportuno diagramma (usando curve nel lucido 22 dove
interessa la curva nell’estremo A relativo alla fig. riportata) si ottiene un β=1.2 circa.
Poi con C) per la cricca rispetto al bordo di sinistra:

17
dove effettuando gli stessi calcoli precedenti ed usando le stesse curve con aeff/b’-1=8/20=0.4 si
ottiene β=1.04 .
Applicando a questo punto il compounding
ovvero la relazione seguente:
K=K0+(K1-K0)+(K2-K0)=[5.013+(6.016-5.013)+(5.214-5.013)]σ = 6.216σ
Naturalmente se la striscia di lamiera è troppo stretta si verifica interferenza e ci vuole il termine
aggiuntivo Ke; quindi il risultato precedente è tanto più valido quanto più larga è questa striscia.
LUCIDO 43
Metodo delle funzioni pesate (anni 70 – Rice):
La complicatezza di questo metodo ha fatto si che inizialmente fosse messo da parte, poi
ultimamente è stato recuperato (utilizzato ultimamene in alcuni programmi di calcolo).
L’idea è : si ha una certa geometria con una certa distribuzione di carichi; supponendo di già
conoscere il caso con la stessa geometria con un sistema di carico diverso, e che (importante) sia un
sistema di carico simmetrico. Supponendo di avere già a disposizione il problema risolto con la
stessa geometria per una condizione di carico simile, e di aver calcolato per questa condizione di
partenza di riferimento il SIF, che è chiamato KIr, e la funzione spostamento apertura della lastra
(ovvero della cricca) v(x,a).
Allora noti KIr e v(x,a), si può costruite una funzione peso, la quale ,chiamata m(x,a), è costruita in
questo modo:
dove si nota che le due relazioni differiscono a seconda se si sta in SPT o SPD, distinguendosi per il
termine (1-ν2).
Pertanto dato che si deve risolvere un problema con la stessa geometria, ma condizioni di carico
diverse, (quello di riferimento deve avere carico simmetrico, quello in esame può essere
qualunque), si può dimostrare che il SIF del caso effettivo non è altro che l’integrale esteso alla
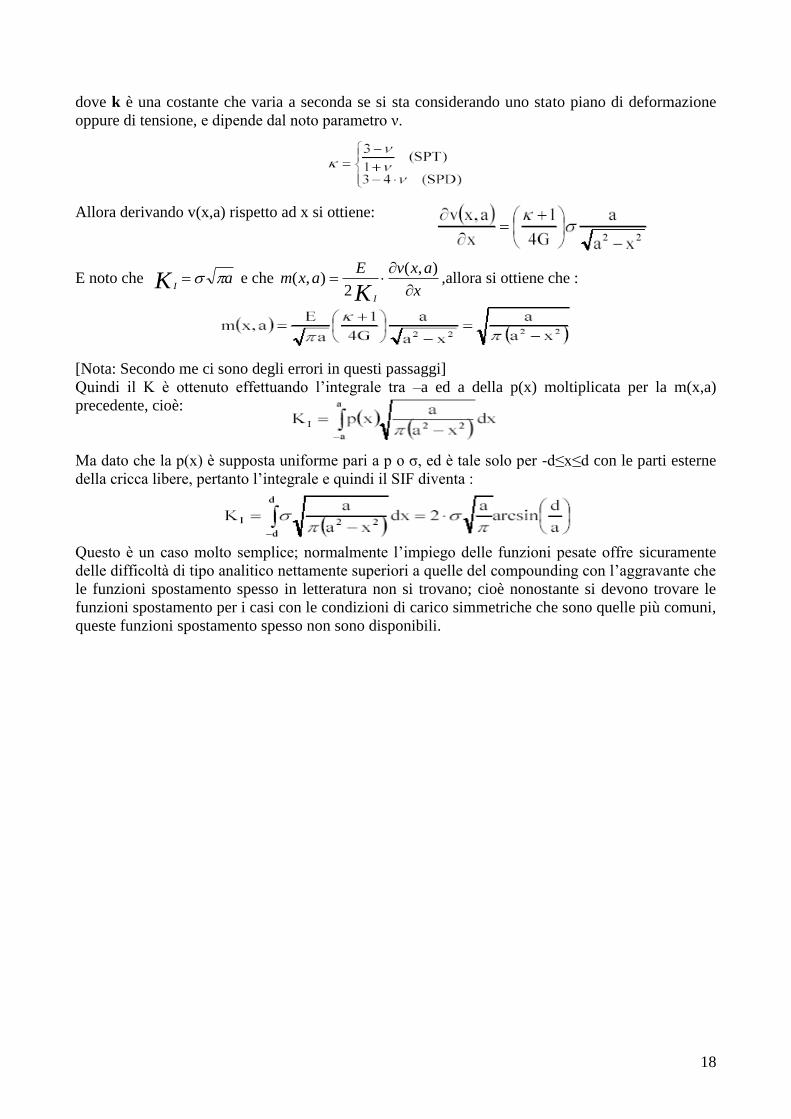
lunghezza della cricca 2a del prodotto del carico effettivo p(x) per la funzione peso m(x,a):
LUCIDO 44
Esempio:
Si vuole calcolare il SIF per una cricca sottoposta ad un
carico uniforme sulle labbra ma che non interessa l’intera
lunghezza delle labbra stesse, e che interessi, invece, la
sola lunghezza 2d rispetto all’ intera lunghezza della
cricca 2a. Ovviamente il caso di riferimento è quello della
cricca in una piastra infinita sottoposta al carico
simmetrico all’infinito σ. Allora per questo caso di
riferimento è noto che aK I ,e la funzione spostamento è:
(la quale è stata già utilizzata per il COD).
18
dove k è una costante che varia a seconda se si sta considerando uno stato piano di deformazione
oppure di tensione, e dipende dal noto parametro ν.
Allora derivando v(x,a) rispetto ad x si ottiene:
E noto che aK I e che
x
axvEaxm
K I
),(
2),( ,allora si ottiene che :
[Nota: Secondo me ci sono degli errori in questi passaggi]
Quindi il K è ottenuto effettuando l’integrale tra –a ed a della p(x) moltiplicata per la m(x,a)
precedente, cioè:
Ma dato che la p(x) è supposta uniforme pari a p o σ, ed è tale solo per -d≤x≤d con le parti esterne
della cricca libere, pertanto l’integrale e quindi il SIF diventa :
Questo è un caso molto semplice; normalmente l’impiego delle funzioni pesate offre sicuramente
delle difficoltà di tipo analitico nettamente superiori a quelle del compounding con l’aggravante che
le funzioni spostamento spesso in letteratura non si trovano; cioè nonostante si devono trovare le
funzioni spostamento per i casi con le condizioni di carico simmetriche che sono quelle più comuni,
queste funzioni spostamento spesso non sono disponibili.

19
PARTE VIII – Meccanica della Frattura (p.2)
SLIDE 1
Stavamo vedendo un poco come si può calcolare il SIF; poi ci siamo interrotti per vedere che
strumenti abbiamo per valutarlo da soli. E abbiamo parlato del compaund
che è un metodo estremamente utile e attuale. Dobbiamo riprendere la quantificazione del SIF per
alcuni casi particolari, per parlare delle cricche tridimensionali .
SLIDE 2
La cricca tridimensionale può essere completamente contenuta all’interno di un componente (sarà
una soffiatura, un difetto di fusione, si è formata per l’effetto di coazioni locali ) oppure potrà essere
superficiale, dovuta ad un qualsiasi accidente, un urto o qualcosa del genere.
Diciamo che nella pratica cricche tridimensionali se ne trovano in gran numero e si fanno degli
studi per ricavare la capacità di sostenere una certa cricca ; queste sono ormai analisi abbastanza
correnti nella meccanica avanzata. Il problema è quello di capire dove si ha interesse a fare questa
analisi: ovviamente si ha interesse di fare questa analisi in 2 categorie di localizzazione di cui la
prima è quella nella quale il cedimento avrebbe conseguenze catastrofiche per l’intero gruppo in
esame (perchè per esempio ne impedirebbe il funzionamento o comporterebbe danni a cascata) e la
seconda (che non sempre coincide con la prima ovviamente) si tratta delle parti, dei punti nei quali
lo stato tensionale è quantitativamente elevato, e quindi con la presenza della cricca il livello
tensionale crescerebbe ancora; quindi per esempio nel caso di un albero con 2 diametri diversi e un
bel raggio di raccordo, la cricca si va a posizionare proprio nel raccordo ; in questa maniera si è già
in una posizione in cui lo stato tensionale è già bello sostenuto e noi ci piazziamo pure una cricca e
vedremo se poi l’albero riesce a resistere oppure no . Il primo risultato utile nel caso di cricche
tridimensionali è dovuto a Sneddon il quale studiò il caso di una cricca circolare piatta , quindi
bidimensionale immersa all’interno di un solido indefinito. Quel tale prese una cricca circolare di
raggio a , quindi la cricca lineare di semilunghezza a, e trovò questa relazione (la prima della slide)
e possiamo dire che questo è se continuiamo a insistere ad utilizzare quella vecchia relazione. Un
passaggio in più fu dovuto ad Irwin il quale studiò delle cricche ellittiche : qua ne è rappresentata
metà soltanto (fig in basso a sx) ed i semiassi c ed a.
Qua si ha una cosa alla quale bisogna prestare attenzione; questa è una cricca ellittica
bidimensionale, un taglio ellittico all’interno del solido: ebbene per ogni punto del fronte della
cricca si ha un SIF diverso. Questo apparentemente può lasciare perplessi, ma in realtà non deve,
per il semplice motivo che il K è un qualificatore del livello tensionale poiché lo stato tensionale
sicuramente non è costante, non è uniforme ma sono variabili anche quegli enti che noi prendiamo a
indicarne complessivamente la severità. È un po’ come se noi dicessimo di avere tante cricche
ognuna che ha la dimensione del generico raggio corrispondente a questa cricca ellittica e quindi a
questo punto possiamo calcolare i SIF , ovvero la funzione SIF. Ma come al solito quando abbiamo
a che fare con un ellisse la descrizione della funzione è eseguita attraverso l’angolo di eulero (la
relazione di eulero) : eulero scrisse le 2 famose equazioni parametriche dell’ellisse e cioè
cos*ax senby * e fece questa costruzione (fig. in basso alla slide), cioè lo studio della
circonferenza sul semiasse minore e sul semiasse maggiore , tracciò il raggio dalle intersezioni, calò
le parallele agli assi e il punto di incontro era proprio un asse dell’ellisse e quindi divenne molto
semplice la descrizione della curva. Quindi, quando qui come altrove in riferimento ad un ellisse
trovate in generale un angolo, non è l’anomalia del punto dell’ellisse che sarebbe questa (la in
corrispondenza di questo raggio vettore (forse in riferimento al cerchio + piccolo) ) ma invece
20
l’anomalia della retta che si adopera nella costruzione di eulero per determinare il punto (rif cerchio
+ grande) . Ciò premesso il SIF è funzione di quest’angolo ed è dato da questa espressione (la
seconda relazione della slide) , m invece è una sorta di eccentricità dell’ellisse , e compare anche
(m) che è un integrale ellittico di seconda specie completo, cioè da 0 a 2
, ed è dato dalla prima
espressione sulla slide successiva.
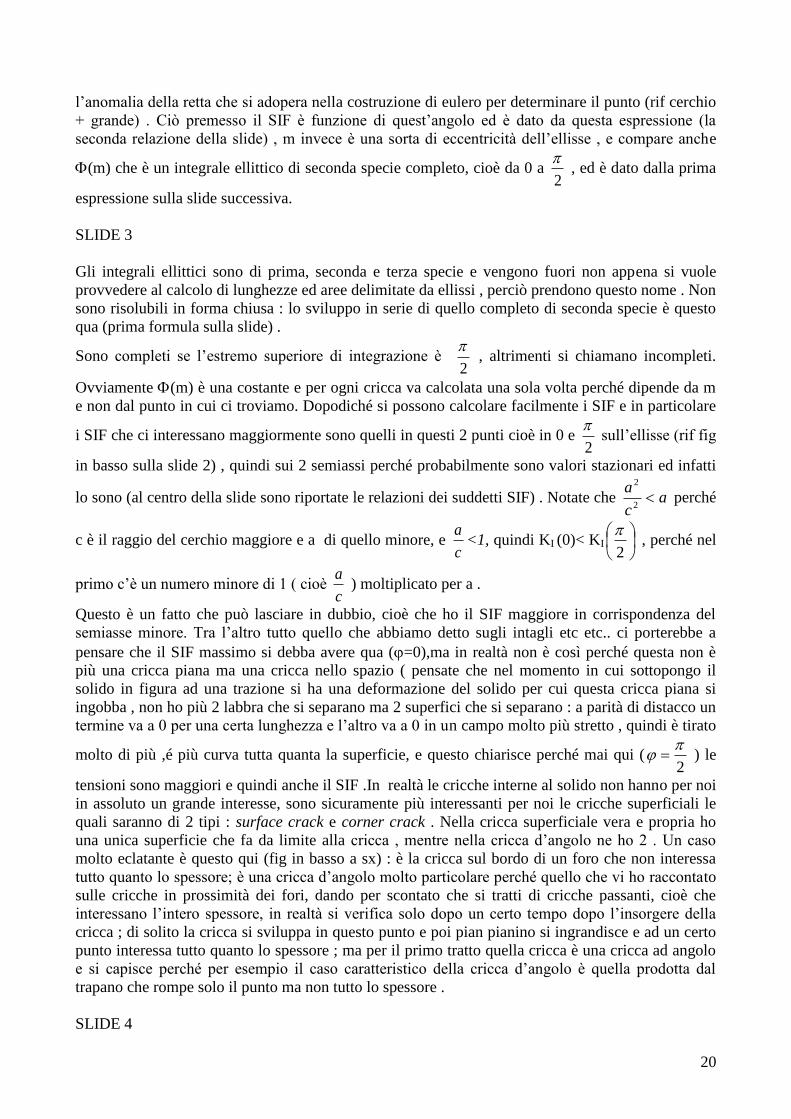
SLIDE 3
Gli integrali ellittici sono di prima, seconda e terza specie e vengono fuori non appena si vuole
provvedere al calcolo di lunghezze ed aree delimitate da ellissi , perciò prendono questo nome . Non
sono risolubili in forma chiusa : lo sviluppo in serie di quello completo di seconda specie è questo
qua (prima formula sulla slide) .
Sono completi se l’estremo superiore di integrazione è 2
, altrimenti si chiamano incompleti.
Ovviamente (m) è una costante e per ogni cricca va calcolata una sola volta perché dipende da m
e non dal punto in cui ci troviamo. Dopodiché si possono calcolare facilmente i SIF e in particolare
i SIF che ci interessano maggiormente sono quelli in questi 2 punti cioè in 0 e 2
sull’ellisse (rif fig
in basso sulla slide 2) , quindi sui 2 semiassi perché probabilmente sono valori stazionari ed infatti
lo sono (al centro della slide sono riportate le relazioni dei suddetti SIF) . Notate che ac
a
2
2
perché
c è il raggio del cerchio maggiore e a di quello minore, e c
a<1, quindi KI (0)< KI
2
, perché nel
primo c’è un numero minore di 1 ( cioè c
a ) moltiplicato per a .
Questo è un fatto che può lasciare in dubbio, cioè che ho il SIF maggiore in corrispondenza del
semiasse minore. Tra l’altro tutto quello che abbiamo detto sugli intagli etc etc.. ci porterebbe a
pensare che il SIF massimo si debba avere qua (=0),ma in realtà non è così perché questa non è
più una cricca piana ma una cricca nello spazio ( pensate che nel momento in cui sottopongo il
solido in figura ad una trazione si ha una deformazione del solido per cui questa cricca piana si
ingobba , non ho più 2 labbra che si separano ma 2 superfici che si separano : a parità di distacco un
termine va a 0 per una certa lunghezza e l’altro va a 0 in un campo molto più stretto , quindi è tirato
molto di più ,é più curva tutta quanta la superficie, e questo chiarisce perché mai qui (2
) le
tensioni sono maggiori e quindi anche il SIF .In realtà le cricche interne al solido non hanno per noi
in assoluto un grande interesse, sono sicuramente più interessanti per noi le cricche superficiali le
quali saranno di 2 tipi : surface crack e corner crack . Nella cricca superficiale vera e propria ho
una unica superficie che fa da limite alla cricca , mentre nella cricca d’angolo ne ho 2 . Un caso
molto eclatante è questo qui (fig in basso a sx) : è la cricca sul bordo di un foro che non interessa
tutto quanto lo spessore; è una cricca d’angolo molto particolare perché quello che vi ho raccontato
sulle cricche in prossimità dei fori, dando per scontato che si tratti di cricche passanti, cioè che
interessano l’intero spessore, in realtà si verifica solo dopo un certo tempo dopo l’insorgere della
cricca ; di solito la cricca si sviluppa in questo punto e poi pian pianino si ingrandisce e ad un certo
punto interessa tutto quanto lo spessore ; ma per il primo tratto quella cricca è una cricca ad angolo
e si capisce perché per esempio il caso caratteristico della cricca d’angolo è quella prodotta dal
trapano che rompe solo il punto ma non tutto lo spessore .
SLIDE 4
21
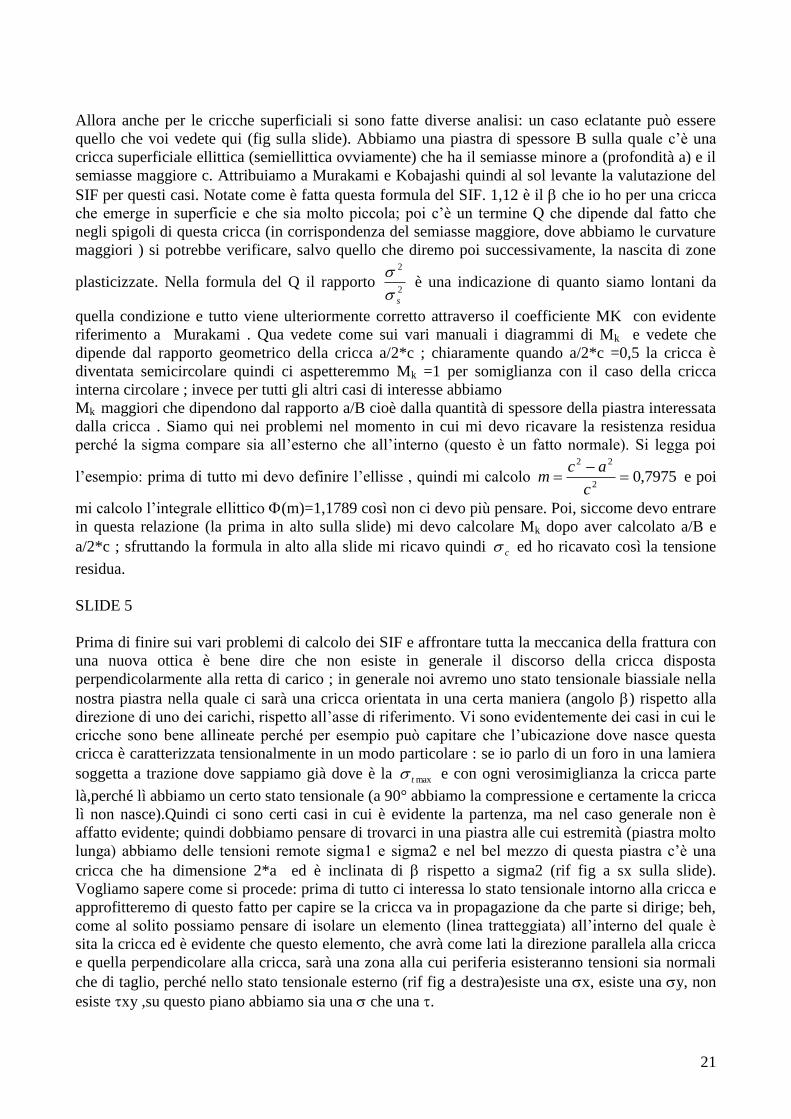
Allora anche per le cricche superficiali si sono fatte diverse analisi: un caso eclatante può essere
quello che voi vedete qui (fig sulla slide). Abbiamo una piastra di spessore B sulla quale c’è una
cricca superficiale ellittica (semiellittica ovviamente) che ha il semiasse minore a (profondità a) e il
semiasse maggiore c. Attribuiamo a Murakami e Kobajashi quindi al sol levante la valutazione del
SIF per questi casi. Notate come è fatta questa formula del SIF. 1,12 è il che io ho per una cricca
che emerge in superficie e che sia molto piccola; poi c’è un termine Q che dipende dal fatto che
negli spigoli di questa cricca (in corrispondenza del semiasse maggiore, dove abbiamo le curvature
maggiori ) si potrebbe verificare, salvo quello che diremo poi successivamente, la nascita di zone
plasticizzate. Nella formula del Q il rapporto 2
2
s
è una indicazione di quanto siamo lontani da
quella condizione e tutto viene ulteriormente corretto attraverso il coefficiente MK con evidente
riferimento a Murakami . Qua vedete come sui vari manuali i diagrammi di Mk e vedete che
dipende dal rapporto geometrico della cricca a/2*c ; chiaramente quando a/2*c =0,5 la cricca è
diventata semicircolare quindi ci aspetteremmo Mk =1 per somiglianza con il caso della cricca
interna circolare ; invece per tutti gli altri casi di interesse abbiamo
Mk maggiori che dipendono dal rapporto a/B cioè dalla quantità di spessore della piastra interessata
dalla cricca . Siamo qui nei problemi nel momento in cui mi devo ricavare la resistenza residua
perché la sigma compare sia all’esterno che all’interno (questo è un fatto normale). Si legga poi
l’esempio: prima di tutto mi devo definire l’ellisse , quindi mi calcolo 7975,02
22
c
acm e poi
mi calcolo l’integrale ellittico (m)=1,1789 così non ci devo più pensare. Poi, siccome devo entrare
in questa relazione (la prima in alto sulla slide) mi devo calcolare Mk dopo aver calcolato a/B e
a/2*c ; sfruttando la formula in alto alla slide mi ricavo quindi c ed ho ricavato così la tensione
residua.
SLIDE 5
Prima di finire sui vari problemi di calcolo dei SIF e affrontare tutta la meccanica della frattura con
una nuova ottica è bene dire che non esiste in generale il discorso della cricca disposta
perpendicolarmente alla retta di carico ; in generale noi avremo uno stato tensionale biassiale nella
nostra piastra nella quale ci sarà una cricca orientata in una certa maniera (angolo ) rispetto alla
direzione di uno dei carichi, rispetto all’asse di riferimento. Vi sono evidentemente dei casi in cui le
cricche sono bene allineate perché per esempio può capitare che l’ubicazione dove nasce questa
cricca è caratterizzata tensionalmente in un modo particolare : se io parlo di un foro in una lamiera
soggetta a trazione dove sappiamo già dove è la maxt e con ogni verosimiglianza la cricca parte
là,perché lì abbiamo un certo stato tensionale (a 90° abbiamo la compressione e certamente la cricca
lì non nasce).Quindi ci sono certi casi in cui è evidente la partenza, ma nel caso generale non è
affatto evidente; quindi dobbiamo pensare di trovarci in una piastra alle cui estremità (piastra molto
lunga) abbiamo delle tensioni remote sigma1 e sigma2 e nel bel mezzo di questa piastra c’è una
cricca che ha dimensione 2*a ed è inclinata di rispetto a sigma2 (rif fig a sx sulla slide).
Vogliamo sapere come si procede: prima di tutto ci interessa lo stato tensionale intorno alla cricca e
approfitteremo di questo fatto per capire se la cricca va in propagazione da che parte si dirige; beh,
come al solito possiamo pensare di isolare un elemento (linea tratteggiata) all’interno del quale è
sita la cricca ed è evidente che questo elemento, che avrà come lati la direzione parallela alla cricca
e quella perpendicolare alla cricca, sarà una zona alla cui periferia esisteranno tensioni sia normali
che di taglio, perché nello stato tensionale esterno (rif fig a destra)esiste una x, esiste una y, non
esiste xy ,su questo piano abbiamo sia una che una .
22
Lo stesso ragionamento può essere fatto inserendo la , nessuno ce lo impedisce, ma supponiamo
che non ci sia.Quindi con riferimento alla cricca, la cricca è sollecitata sia da tensioni normali
,per cui lavorerà nel modo uno come abbiamo fatto finora, ma ci saranno anche le tensioni di
taglio per cui lavorerà in modo 2; quindi avremo contemporaneamente un KI e un KII : questo è un
caso nel quale, risentendosi sulla cricca queste tensioni, abbiamo la presenza di due campi di
sollecitazioni locali che si andranno a sovrapporre, uno caratterizzato da KI e l’altro da KII ; manca
il KIII che richiederebbe uno spostamento fuori piano, ed è una cosa che si verifica raramente,
mentre invece un caso del genere è estremamente comune (rappresenta la generalità).
Per prima cosa dobbiamo calcolare e in funzione di sigma1 e sigma2, cioè in funzione dei
carichi esterni applicati, e per questo dobbiamo usare le relazioni di trasformazione in condizioni di
stato piano (sulla destra); possiamo così ricavare l’espressione di KI : ho messo in evidenza sigma2
e ho chiamato m il rapporto 2
1
; analogamente abbiamo l’espressione del KII.
SLIDE 6
Abbiamo visto che il buon Vestergard ci ha lasciato le formulazioni dello stato tensionale
nell’intorno dell’apice della cricca per il modo 1, 2, 3; allora la tensione che avremo, per il principio
di sovrapposizione degli effetti, sarà la somma di quella dovuta a questo caso e di quella dovuta a
quest’altro caso.
Ecco le espressioni che riferiscono rispetto a KI corrispondono a quelle f () che vi ho indicato
allorché vi ho parlato della soluzione del Vestergard.
La funzione angolare che abbiamo nel caso 2 non ve l’ho indicato ma, credetemi,si tratta di queste
qua.
Quello che dobbiamo tener presente è che nell’intorno dell’apice della cricca ci sarà uno stato
tensionale che dipenderà sia da che da , quindi che conterrà in sé sia
KI che KII: questi stati di tensione sono detti misti o combinati.
In moltissimi casi il KII esiste, ma è molto più piccolo di KI ,ad esempio 10 volte più piccolo,e in
quei casi si è incerti se considerarlo biassiale oppure fregarsene.
Allora Erdogan e Sih si domandarono in quale direzione si sarebbe verificato l’avanzamento di
questa cricca: supponendo che questa cricca aumenti, in quale direzione si propagherà? Angolo
definito da un’anomalia misurata rispetto all’apice della cricca.
L’idea dei due ricercatori è stata questa:siccome la cricca si propaga per apertura, cioè per distacco
delle due facce, evidentemente la tensione efficace è la tensione t ,la tensione normale
circonferenziale. La r no perché mi produce semplicemente un aumento o una diminuzione di
spessore, la è sempre più piccolina e allora l’idea fu questa: la propagazione avverrà nella
direzione in cui t è massima. Quindi scriviamo 0
t e ricaviamo l’equazione che ci deve
consentire di ricavare .
E’ evidente che l’equazione è questa qui ed è proprio uguale alla ; quindi 0
t nella
direzione in cui 0rt , quindi ho tensione normale massima e tensione tangenziale nulla. E quindi
la relazione che ci consente di ricavare la direzione di diramazione è la penultima sulla slide, una
volta noti i due SIF.
D’altra parte per ogni SIF abbiamo dato un valore in funzione delle condizioni al contorno, della
direzione della cricca,del valore di m, sostituendo queste funzioni noi otteniamo questa nuova
forma di equazione in che contiene anche m e (ultima relazione sulla slide).La direzione in
non dipende dal valore delle tensioni ma solo dal rapporto dei valori di esse, più l’orientamento. Ora
23
evidentemente se =0 la cricca è allineata con sigma2, e quindi non c’è KI ; se invece 2
evidentemente la cricca è perpendicolare a sigma2 e parallela a sigma1,e sarà sigma1 che non avrà
più il K1. Per di più m può variare tra 0 e 1 (volendo va da 0 ad infinito): se fosse >1 potrei invertire
la misura di e il risultato non cambierebbe.
Evidentemente se =0 si ottiene che =0, cioè praticamente se la cricca è allineata con sigma2,
continua a propagare lungo sigma2; nel caso in cui m=0 avremmo 0 = 0 e quindi non sapremmo
valutare (in realtà vedremo che va a zero per continuità).
Se 2
la cricca sarà allineata con sigma1, e allora sen=0.
SLIDE 7
In pratica è una curva che noi otteniamo su un diagramma di questo genere; sono tutte curve che per
=0 e =90° mi danno =0 tranne il caso m=0 dove per continuità se noi portassimo al limite il
valore che abbiamo per 90°- (anzi per 0
+) allora dovremmo ottenere che questa strana curva
andrebbe a circa 72° e quindi presenterebbe una discontinuità con le altre; in realtà questa
discontinuità è puramente analitica : tutte quante le curve partono da zero, crescono e poi tornano a
zero e man mano che m diminuisce il punto di massimo si sposta verso l’asse delle ordinate quindi
sostanzialmente questo è un punto degenere (quello a 72° sull’asse delle ordinate) perché la curva
qui dovrebbe presentare una cuspide ma in realtà per m=0 se se =0 anche =0 però subito dopo
=72° ;poi ancora se mi metto ad un certo valore di all’aumentare di m l’angolo di diramazione
diminuisce. Questo è chiaro perché all’aumentare di m si sente la presenza di sigma1 che aumenta e
farà deviare la cricca nella propria direzione e quindi è chiaro che deve diminuire all’aumentare
di m . Ora però se guardiamo l’equazione (in basso alla slide 6) questa non ci dice altro che se la
cricca propaga , lo fa nella direzione (ammesso che propaghi) : la cricca propagherà se il K
complessivo corrisponde alla tenacità; e qual è il K complessivo? Non lo sappiamo definire ma
sappiamo dire ‘ la sollecitazione è più grande o più piccola di questa quantità ’, possiamo dire che K
è minore della tenacità ma quando è un K solo. Questa qui (slide 6: quantità in parentesi quadra
nella seconda equazione della slide) è una combinazione di due K : in molti codici di calcolo voi
sentirete parlare di K effettivo. Allora possiamo dire che se K effettivo è minore del Kc non si ha
propagazione altrimenti si ha propagazione. In pratica la cosa più logica è dire: se la tensione t
nella possibile direzione di propagazione(quindi come valore massimo) risulta minore della
t critica (resistenza residua) per la cricca disposta come è disposta e caricata nel modo I
perpendicolarmente, allora non si ha propagazione altrimenti si ha propagazione. Allora t avrà
propagazione in condizioni critiche, quindi è venuta meno la resistenza critica se t vale Kc cioè
tenacità su radice di 2r.
In pratica,ripetendo il concetto, io ho determinato la direzione nella quale si può avere la
propagazione ma devo capire se la propagazione avviene o non avviene. Se mi metto in stato
monoassiale dico che la propagazione avviene se la sigma che è uguale a K su radice di 2r
raggiunge la resistenza residua la quale è pari a r
K c
2 ; solamente la t massima è data proprio da
questa espressione e ci si chiede dove sia la funzione di : non c’è perché io ho una cricca
perpendicolare alla direzione del carico e quindi si sta aprendo , quindi si allunga semplicemente .
SLIDE 8
24
Qua malgrado la forma sta avvenendo la stessa cosa perché io sto pensando a una cricca che si
allunga in direzione ed è un discorso che posso fare perché in direzione le sono assenti quindi
mi sono riportato di nuovo nella condizione che mi ha consentito di scrivere questa relazione della
resistenza residua (quella di cui si è parlato prima).
Allora sostanzialmente se si determina la propagazione della cricca, si determinerà nella direzione
fornito da questa equazione (probabilmente l’ultima sulla slide 6) e si verificherà qualora sia almeno
soddisfatta questa equazione (la prima sulla slide 8) oppure se la disuguaglianza sia maggiore. In
pratica posso pensare di imporre un valore di KII , ricavo KI e ottengo così l’equazione di .
Ricavato torno indietro e mi ricavo un valore di KI. Questo per spiegare come è realizzato questo
diagramma, il quale mi indica le coppie di valori KI e KII che danno luogo a propagazione, per i
quali vale il segno di eguaglianza (nella prima equazione sulla slide). Quello che non vedete in
questo diagramma è l’angolo…(non si capisce perchè c’è il cambio di cassetta).
Notate bene questo che sta scritto qua; tutto il criterio che noi abbiamo sulla tenacità di cui abbiamo
già parlato è basato su una tensione che raggiunge un valore limite: il K che raggiunge la tenacità, la
sigma che raggiunge r
K c
2 non è altro che il criterio della massima tensione normale.
Quindi ci siamo dimenticati di Von Mises e di Beltrami ,in pratica stiamo parlando di tensioni
normali, ed è chiaro che stiamo parlando di frattura fragile. Per i materiali fragili non si ha un
apprezzabile variazione di forma ma un allontanamento delle fibre atomiche. Se siamo all’interno
della curva non si verifica la propagazione perché i punti sulla curva sono quelli che ci determinano
la eguaglianza.(La compressione mi chiude la cricca e non la fa avanzare).
SLIDE 9
A questo punto abbiamo fatto una panoramica sulla sovratensione in presenza di frattura , sulle
possibilità di calcolare i SIF su alcuni casi emblematici, perfino sulle cricche tridimensionali e poi
ci siamo soffermati su questi casi di sollecitazione biassiale. Tutto quello che abbiamo detto
potrebbe essere affrontato in una maniera diversa: facciamo ciò per il fatto che ragionando in
maniera diversa otteniamo le stesse cose in una nuova forma, e può essere che impariamo qualcosa
in più e, stranamente, i criteri di cui stiamo parlando sono i criteri energetici che, nel campo della
frattura, sono stati applicati molto prima di quelli dei quali abbiamo parlato.
Nel 1921 se non erro un tale ingegner Griffith iniziò a fare degli studi sul vetro e si accorse per
primo della presenza di fratture che si propagavano (d’altra parte il vetro è il materiale fragile per
eccellenza: o propagava o no, quindi non si ha una cricca che si propaga piano piano; o si ha una
cricca ferma o si ha una cricca che si propaga a razzo).
Gli studi di Griffith furono presi in considerazione solo in un secondo momento (Vestergard,etc…)
alla luce anche della innovazione tecnologica.
L’inizio dell’idea è abbastanza semplice.
Supponiamo di avere una cricca che si propaga e facciamo il bilancio energetico: avremo un
sistema sottoposto ad un sistema di carichi, e avremo che il lavoro eseguito dalle forze esterne in
una parte sarà conservato nel corpo sotto forma di energia di deformazione, e dall’altra parte
un’altra quota sarà utilizzata nell’avanzamento della cricca. Quindi in generale possiamo scrivere
questa equazione (la prima) che è molto banale.
E che succede se le forze esterne non compiono lavoro (cioè sono nulle)? Allora vuol dire che
U+W=0 . U è l’energia immagazzinata e W è l’energia spesa per l’avanzamento della cricca.
Possiamo dire che se c’è W ,cioè se c’è l’avanzamento della cricca, allora W=-U (-U è l’energia
elastica rilasciata).
Questo è un modo per dire ‘ L’avanzamento della cricca può avvenire se è disponibile energia
sufficiente che ha immagazzinato all’interno del corpo come deformazione elastica’ ; quindi se il
25
corpo ha assorbito una certa dose energia elastica la può mettere a disposizione della cricca perché
si determini il suo avanzamento.
Poiché la configurazione del corpo cambia molto con l’avanzamento della cricca, è possibile
esprimere questo criterio in termini differenziali, in corrispondenza di un incremento di lunghezza
da della cricca. E quindi possiamo scrivere le relazioni in basso alla slide, e la condizione per la
propagazione è questa da
dW
da
dU (come condizione limite, perché in realtà dovremmo avere il
segno maggiore (vedi slide 10)).
SLIDE 10
Nella prima relazione della slide da
dU è chiamato gradiente di rilascio dell’energia (ed è un
gradiente e non una velocità), e si è indicato con G per ricordare Griffith, mentre da
dW lo
chiamiamo R. Per cui si dice che se G>R si ha propagazione, se G<R non si ha la propagazione.
Questa relazione ha rivoluzionato la meccanica della frattura e ha dato luogo a delle curve che non
sono altro il diagramma di R per varie lunghezze della frattura e che si chiamano R-curve. Allora la
prima cosa da capire è come si calcola G, che è la quantità di energia rilasciata nel momento in cui
si va ad aprire una cricca, oppure è la quantità di energia assorbita nel momento in cui vado a
chiudere la cricca, dal momento che il sistema è elastico lineare. Lo schema che abitualmente si
adopera per il calcolo di G è questo: ho una cricca di lunghezza a e la vado a chiudere di =da ,
applicando le tensioni necessarie per la chiusura, che sono quelle che agiscono qui se il sistema è
continuo. Applicherò per la chiusura le tensioni r
K
2 compiendo un lavoro: devo chiudere solo
un pezzo della cricca, e quindi ad un certo punto ho il valore x=-+r ,più la distanza dall’apice che
sto formando, quindi a-+r = x .
Posso dire che l’energia immagazzinata non è altro che il lavoro speso da queste y per chiudere;
allora la sigma agirà su una superficie con altezza dr e profondità quella che è (ad es. 1). Questa
forza elementare deve compiermi un lavoro per uno spostamento v. Devo considerare uno
spostamento 2v perchè le sigma stanno sopra e sotto. Nell’espressione del v posso togliere i termini
quadratici (passaggio con il ) perché mi trovo con lunghezze molto piccole. Devo quindi risolvere
l’integrale, e ottengo che l’energia assorbita è E
KU I
2
e quindi ricavo E
KG I
2
(Abbiamo
supposto uno stato piano di tensione; se avessimo supposto uno stato piano di deformazione
avremmo avuto E
KG I
22 )1( ) . A questo punto capite che o calcoliamo G o calcoliamo IK
abbiamo fatto la stessa cosa; quindi un qualsiasi criterio fondato sul SIF , fondato sulle forze, o
fondato su G, quindi in termini energetici, è la stessa cosa.
SLIDE 11
In tutto quello che abbiamo detto abbiamo detto che le forze esterne non compiono lavoro; vediamo
cosa succede se compiono lavoro.
26
Quando applichiamo le forze possiamo lavorare in termini di controllo di carico e di controllo di
spostamento; possiamo dire che la cricca propaga a carico costante o che la cricca propaga a
spostamento (allungamento) costante . Mi spiego meglio facendo questi due esempi: nel primo ho
una piastra forata criccata di lunghezza l e di una certa larghezza che, sotto l’azione di un carico P0
,si allunga di l. Qual è l’energia che ho immagazzinato? Ho il diagramma in cui le ordinate sono i
carichi e le asciss gli spostamenti, e traccio la retta OA e il raggio vettore del punto di
funzionamento. L’area OAB rappresenta l’energia elastica immagazzinata.
Supponiamo adesso che la cricca non sia più lunga a, ma a+a, e sto lavorando in controllo di
spostamento, per cui faccio allungare la piastra di l. Ovviamente, siccome è chiaro che la
cedevolezza della piastra è aumentata, per fare aumentare la lunghezza di l devo applicare un
carico più basso. Questo si poteva dedurre anche facendo il calcolo al centro della slide che in realtà
è sbagliato perché parte dal concetto che tutto il l sia localizzato in questa sezione (quella
adiacente alla cricca),il che è sbagliato però rende l’idea. Allora per questo secondo carico ottengo
lo stesso l però sotto un carico più basso, quindi avrò immagazzinato un’energia inferiore, per
esempio OCB.
Allora nei due casi c’è una differenza di energia immagazzinata, che è rappresentata da OAC,che
può essere interpretata come quella energia che deve essere rilasciata per creare la lunghezza a a
parità di allungamento complessivo della piastra.
SLIDE 12
Naturalmente posso fare lo stesso ragionamento anche a carico costante: se ragiono a carico
costante ovviamente le due piastre, proprio perché quella in cui c’è la cricca maggiore ha
cedevolezza maggiore, si allungheranno in maniera diversa. Posso allora dire che quando ho la
cricca di larghezza a assorbo l’energia OAC, quando ho la cricca di lunghezza a+a assorbo
l’energia OEF. Quindi l’energia elastica che si rende disponibile nel passaggio da a ad a+a è OAE,
mentre CAEF è il lavoro compiuto dalla forza P. Quindi Pl=CAEF che come sappiamo deve
essere il doppio di OAE.
Leggere nota a fondo slide.
SLIDE 13
Questo discorso può anche eere visto in forma generale analizzando un carico di questo tipo. (I
simboli non sono gli stessi usati in precedenza: F=Lf ).
Nel momento in cui ho dei carichi che compiono un lavoro, posso calcolarmi G:
)( dUdLda
dG f ; se il carico è P, il lavoro che viene compiuto è perché mi cambia
l’allungamento, quindi sarà da
ldP
)(. U è l’energia interna, pari a lPU
2
1, e poi
considerando CP
l
dove C è la cedevolezza, possiamo scrivere 2
2
1CPU . Vado ad inserire tutto
nella relazione in alto e, derivando a parti, si ottiene la relazione finale.
Per scrivere l’equazione finale occorre supporre P=cost. altrimenti avrei dovuto avere anche il
termine da
dPC , che non c’è. La G può essere interpretata come variazione di energia interna che
ho a carico costante anche se le forze compiono un lavoro; quindi mentre io all’inizio ero arrivato a
questa espressione (questa in basso) supponendo nullo (non considerando) il lavoro delle forze
esterne, arrivo alla stessa espressione considerando le forze esterne, purchè sia interpretata in modo
tale da dire che ho un carico che è costante.
27
SLIDE 14
Allora G è sistemata.
D’altra parte abbiamo W: se abbiamo detto che la propagazione avviene quando G>R, se non
sappiamo calcolarci W il discorso rimane lettera morta.
Griffith, non sapendo come cavarsela, disse W=(cost. * lunghezza di frattura), cioè W è
proporzionale alla frattura. In realtà lui ragionò in termini di energia necessaria per creare una
superficie esterna (io sto separando), però nel momento in cui creo una frattura io sto creando 2
superfici esterne, e per questo mi compare 2; quindi diventa l’energia necessaria per creare una
superficie unitaria. Il fatto di dire 2a vuol dire che questa energia è indipendente dalla lunghezza
della cricca che sto realizzando o a partire dalla quale mi sto muovendo,e quindi la lasciamo così, n
modo da scrivere che R=2 che è costante. Questo vuol dire che se io ho un componente posso
capire se
22
E
a oppure no. R quindi rappresenta una capacità del materiale di resistere, al di
là del quale si formano queste due superfici, quindi praticamente la cricca può avanzare.
Supponiamo allora di avere un materiale per il quale io conosca R che è costante; quindi posso
costruirmi un diagramma (quello sulla sinistra): sull’asse delle ascisse riportiamo la lunghezza della
cricca e sull’asse delle orinate posso riportare G o R. Se riporto R=2=cost. è una proprietà del
materiale ed è sempre la stessa, se riporto E
aG
2
sarà una rette perché è proporzionale ad a.
Logicamente se io prendo per esempio questa retta (quella col punto A) se prendo questo punto (un
punto generico sulla suddetta retta nella parte tratteggiata) ho una cricca di una certa dimensione a,
poiché G<R la cricca non propaga. Se arrivo al valore di a1 allora G=R e sto in condizione di
incipiente propagazione. Queste due rette corrispondono a valori di sigma diversi e , in particolare,
sigma2<sigma1 perché, dal momento che
crit
crita
K
2 , se ho un a critico più grande avrò una
sigma più bassa.
In realtà si adopera il diagramma sulla destra: è un diagramma che corrisponde ad uno spostamento
della scala dei tempi. Si fotografa l’istante attuale e si dice che la cricca ha questa lunghezza e poi in
futuro ci saranno degli incrementi di cricca, quindi dei a. E’ un diagramma in cui si scrive
sull’asse delle ascisse un a e sull’asse delle ordinate non cambia niente. Sullo stesso asse delle
ascisse, ma dal lato negativo, io posso riportare la lunghezza della cricca che io vedo in questo
momento. “Uhm Uhm”
Se per esempio sono partito dalla cricca di lunghezza a1 con la tensione 1 , il tratto OH è G
nell’istante presente ed è pari ad R, quindi mi trovo in condizione di incipiente propagazione. Se la
stessa cricca è caricata da una tensione 2 , nell’istante attuale il G è pari al tratto OF, che è minore
di R, e la cricca non propaga.
Solo se per opera dello Spirito Santo questa cricca avesse questo aumento di lunghezza (ai) che non
può avvenire stabilmente quando la propagazione è lenta perché G<R, allora si avrebbe
improvvisamente la propagazione instabile.
Invece se ho la 2 , quindi il carico minore, per avere adesso la propagazione dovrei comunque
avere il valore di G questo (boh?) e quindi la cricca oggi sarebbe dovuta diventare più grande,
perchè se io porto una retta parallela a 2 e G è questo (mah!), nell’istante attuale incontro
l’intercetta che mi rappresenta la lunghezza di cricca.
Quindi questa è un’applicazione molto semplice che però mette in luce quel discorso che abbiamo
fatto per sapere se la cricca propaga o no. Attenzione! Perché se propaga, propaga di brutto perché
G aumenta sempre mentre R resta lo stesso (aumenta sempre l’eccesso di G rispetto ad R): è quella
che si chiama propagazione instabile (“qualcuno mi fermi”: la propagazione parte e non si stoppa
nel modo più assoluto).
28
SLIDE 15
Non è detto che G sia dato da una retta. Se sto lavorando in controllo di spostamento, poiché cambia
la cedevolezza, al variare di a cambia pure sigma perché il l è costante, e quindi va a finire che io
otterrei un diagramma di questo genere (in alto a sx); però è una finezza perché possiamo ritenere
sostanzialmente che le curve G costante siano delle rette.
Torniamo un attimo indietro (diagramma in basso a sx) e torniamo al diagramma in cui per una
certa cricca noi avevamo posto le tensioni sull’asse delle ordinate, le lunghezze sull’asse delle
ascisse e avevamo fatto delle curve a K costante.
Se la più esterna mi rappresenta la tenacità , io ho modo di stabilire la lunghezza critica di una
cricca; supponiamo che nell’istante presente i io abbia certi valori di a e sigma , quindi il mio K è
quello che mi identifica la curva interna, mentre la tenacità è il K che mi indica questa altra curva.
Praticamente la lunghezza critica sarà questa (dal punto (ai,sigmai) fino al corrispondente punto
sulla curva esterna procedendo orizzontalmente): senonchè avviene una cosa che ci fa pensare di
non aver capito niente. Se ho un materiale fragile quanto detto sopra è corretto; se il materiale è
duttile l’esperienza ci insegna che passare da ai ad a critico a carico costante è impossibile ma, ad
ogni aumento di a si accompagna anche un aumento di , in modo tale che per arrivare alla rottura
occorre percorrere una curva che ha per lo più quell’andamento (la curva tratteggiata tra le due
curve a K costante).
Questo vuol dire che per passare dalle condizioni attuali alle condizioni critiche io avrò un aumento
di lunghezza per un aumento di carico e poi starò buono; se ho un altro aumento di carico avrò un
altro aumento di lunghezza e starò buono; e così via.
Poiché io posso stare in equilibrio solo se G<R , vuol dire che per i materiali duttili R non è
costante.Infatti se andiamo tracciare R per un materiale duttile (diagramma in alto a dx) avrò una
curva crescente (R-Curve).Vedete che se mi trovo qui (ai), con questo valore della tensione (quello
col punto B), posso pensare che per essere G=R si debba avere la propagazione della cricca, ma in
realtà non è vero perché nel momento in cui è aumentata un poco la cricca (a2) R è diventato più
grande, quindi in quel momento G diventa più piccolo di R e non si ha propagazione. Si avrà
propagazione se cambio la tensione ad un altro valore, in modo tale che il G passi per questo valore
( C ). La cricca non si fermerà più quando arrivo al punto di tangenza ( D ) perché, siccome la R
non cresce ulteriormente al di là di quella tangente, allora se aumenta la cricca aumenta R, ma si
trova sempre sotto la retta, e per questo continua a propagare.
Quando ho un materiale duttile, l’ipotesi per la quale non si ha propagazione è non solo G>R, ma
deve risultare anche da
dR
da
dG . E’ evidente che quando sto parlando di propagazione, sto parlando
di propagazione inarrestabile, e cioè quella propagazione che chiamiamo instabile, mentre in tutta
questa zona (area nella zona BCDH) la propagazione è stabile, cioè applico un carico, aumenta un
poco e si ferma, e così via…cioè può essere controllata, a differenza del caso precedente. Il
problema è come si ricava la R ,come si ricava la curva R. Questa curva si ricava sperimentalmente
‘barando’ perché si dice : la propagazione si ha quando G=R ma io R non la so misurare mentre so
misurare G. Allora carico il provino, nel momento in cui si rompe vedo qual è la G e mi ricavo il
valore di R. Giocando in questa maniera si costruisce la curva R del materiale.
SLIDE 16
Questa pagina è poesia perché ogni volta che devo fare dei conti ho bisogno di una forma analitica
della curva R. Allora si da alla curva R una forma di questo genere:
1
aR in cui occorre ricavare i coefficienti e . Questa è una forma che viene data sulla base
di una relazione sperimentale e cioè praticamente : se io considero una cricca che adesso ha
29
lunghezza a0 e che arriva a rottura dopo che è stata incrementata di a , avrò la lunghezza critica
a+a che è più o meno proporzionale ad a0 per qualunque a0 e così ricavo la formula analitica della
curva R.
SLIDE 17
Ma molto più importante di questo è capire perché i materiali duttili hanno una curva curva R e non
hanno più R costante. Non hanno R costante perché noi finora abbiamo parlato di frattura fragile,
mentre nei materiali duttili si verifica una frattura duttile, la quale è dovuta a tutt’altri fatti e si
propaga in tutt’altra maniera anche se l’effetto finale è poi lo stesso. Il meccanismo di rottura è
diverso : non è più quello della separazione netta delle file di atomi, ma è dovuto, come abbiamo
detto quando abbiamo cominciato a parlare di frattura ,alla creazione di vuoti; siamo partiti
dall’idea di avere delle inclusioni, degli intrusi tra un grano e l’altro e, in determinate
circostanze,sotto l’azione del carico, nel momento in cui questo carico eccede di un valore che
dipenderà dal tipo di materiale, dal tipo dell’inclusione, dalle dimensioni dell’inclusione…..(cambio
cassetta ).
Le inclusioni all’interno di un materiale duttile sono numerosissime e saranno quindi distribuite in
vario modo quindi sotto l’azione del carico, all’aumentare del carico, in certe zone comincia a
determinarsi la nucleazione ; cioè praticamente le pareti del materiale base si distaccano da queste
inclusioni. Se aumento il carico si nucleeranno altri vuoti, ma quelli che già esistono per effetto del
carico si ingradiranno cioè aumenteranno. Ovviamente supponiamo che questa sia una sfera
(secondo oggetto in alto)se io tiro, se ho il distacco,questo vuoto aumenterà di dimensioni in questa
direzione (quella delle frecce) qua invece non può ridursi perché c’è l’inclusione (guardare figura),
tenderà quindi a diventare un ellisse sempre più pronunciata e sempre più staccata dall’inclusione.
Contemporaneamente all’aumentare del carico la distanza tra questi vuoti andrà a diminuire finchè
ad un certo punto si romperà la zona intermedia tra 2 cavitàe si avrà la coalescenza. Allora nel
momento in cui io comincio a prendere un materiale in cui ci sono diverse inclusioni (fig in basso a
dx) avrò una frattura che si propagherà per coalescenza di vuoti : quindi il meccanismo che
determina la crescita della frattura sarà tale da provocare una crescita che vedrà in qualsiasi istante
delle inclusioni che non si sono mosse, dei vuoti che si sono appena nucleati, altri che sono in fase
di accrescimento e altri ancora che sono in fase di coalescenza e poi ci sono quelli che sono
‘scassati’ . Abbiamo aumentato il carico e avrò quindi che questa cricca può aumentare. Questo è un
modello molto attuale che è stato proposto da Gurson (fig sulla destra) : sostanzialmente l’idea della
nucleazione del vuoto viene ad essere collegata con una certa deformazione locale; in pratica se la
deformazione locale supera un certo valore allora avviene il distacco tra l’inclusione e la particella .
Questa deformazione (energia) minima di cui ho bisogno dipende dalla di Griffit che è una
costante caratteristica del materiale e anche da R0 che è il raggio dell’inclusione pensando che
l’inclusione sia una sferetta: siccome R0 è elevato alla potenza –1/2 allora quanto più grande è
l’inclusione tanto più piccola è la deformazione necessaria per innescare la formazione di vuoto. Poi
una volta determinatisi una serie di vuoti la deformazione cresce ancora e in qualsiasi istante l’asse
maggiore del vuoto sarà funzione della deformazione alla quale siamo arrivati, mentre nello stesso
tempo sarà diminuita la distanza tra 2 cavità (queste cavità che saranno lontane, per effetto del
carico si allungano e si avvicinano).
SLIDE 18
Evidentemente esisterà un valore della deformazione aldilà del quale si ha la coalescenza, quindi
aldilà del quale le zone si vanno a riunire: questo avverrà in corrispondenza di una deformazione
finale detta f e secondo Gurson si ritiene che la condizione di criticità sia esprimibile attraverso una
relazione tra b ed X, dimensione del vuoto e distanza tra i vuoti (vedi relazione in basso). K(n) è
funzione del tipo di materiale.

30
X e b li abbiamo già calcolati, quindi, a parte la f , parlare di b/X e parlare di 0
0
X
R è la stessa cosa,
ma R0 è il raggio dell’inclusione e X0 è la distanza iniziale tra le inclusioni, quindi possiamo avere
un’idea di quello che avviene.
SLIDE 19
Supponiamo di considerare un cubetto di materiale base: quindi la X0 è pari al passo tra una
inclusione e l’altra; questo cubetto, che sarà un insieme di elementi finiti nella modellazione, avrà
un volume X0 * X0 * X0 ; contemporaneamente al centro di questo cubetto c’è il difetto, cioè c’è
un’inclusione di raggio R0 , quindi avrà un volume pari a 3
03
4R . Se consideriamo il rapporto f tra il
volume dell’inclusione e il volume del materiale ,vediamo che esso dipende dal rapporto
3
0
0
X
R,e
quindi questo rapporto
0
0
X
R sarà la frazione di inclusioni che caratterizza il mio materiale e sarà
più basso o più alto a seconda della qualità iniziale. E’ chiaro che se K, che determina la criticità
della situazione del mio materiale, è una costante del materiale, è evidente che se
0
0
X
R è più
piccolo, per arrivare alle condizioni critiche ho bisogno di una f più grande, cioè di una
deformazione maggiore. Se invece
0
0
X
R è più grande, cioè se la qualità è inferiore perché ci sono
molte inclusioni oppure ci sono inclusioni di grosso diametro, mi basta una deformazione più bassa
per arrivare alle condizioni critiche. Tutto questo lo si scrive in questa maniera (relazioni in basso),
e si vede che la f è funzione della percentuale di inclusioni che io ho nel mio sistema.
31
Meccanica della frattura p.2 12) LE FIGURE IN OGNI SLIDE SONO CONTATE DALLA PRIMA IN ALTO A SINISTRA IN SENSO
ORARIO
Lezione del 17/02
Iniziamo questa lezione introducendo l’integrale J che si basa sull’analisi dell’energia potenziale di
un corpo ciccato, la quale dipendeva dalla differenza tra l’energia complessiva di deformazione ( W
che consideriamo estesa all’area dal momento che l’analisi condotta è bidimensionale)e il lavoro
compiuto dalle forze al contorno. Se ci interessa quindi il gradiente dell’energia potenziale, come
ipotizzato da Griffith, lungo la lunghezza della cricca, bisogna derivare l’equazione dell’analisi
dell’energia potenziale rispetto alla lunghezza della cricca. Rice però dimostrò, applicando il
teorema della divergenza, che tale gradiente poteva essere posto in una forma particolare che da
integrale di superficie passava a integrale di linea e il potenziale elastico W veniva integrato solo
lungo la direzione perpendicolare all’asse della cricca (vedi dx2 ), mentre il prodotto tra le forze
esterne e i gradienti di spostamento veniva valutato in direzione parallela all’asse della cricca (vedi
dx1). C’è da dire che Rice dimostrò anche che questo integrale valutato lungo la linea chiusa era
pari a 0, detto integrale J. Il fatto che l’integrale J sia pari a 0 lungo una linea chiusa porta alla
conseguenza: supponiamo di avere un corpo criccato e di fare una curva chiusa, che abbraccia
l’apice della cricca, un segmento di uno dei due lati delle labbra della cricca, un’altra curva che
riprende l’apice della cricca e il restante labbro della cricca. (slide 22) Dall’analisi della figura 1 si
nota che i tratti appartenenti alle labbra della cricca, AF e CD, sono scarichi e non danno contributo
all’integrale: ciò vuol dire che l’integrale esteso alla prima curva Г1 più l’integrale esteso alla
seconda curva Г2 deve essere pari a 0, ovvero il primo integrale deve essere pari a - il secondo
integrale, ma poiché le due curve sono state percorse in senso opposto, se invertiamo il segno di
quella percorsa in senso orario (per convenzione), i due integrali diventano uguali. L’integrale J è
quindi nullo se esteso ad una linea chiusa e assume un valore costante su qualsiasi curva che
partendo da un labbro della cricca arriva sull’altro abbracciando l’apice della cricca, rimanendo
tutto all’interno del corpo ciccato. Se però continuiamo a considerare che l’integrale J è la derivata
rispetto alla lunghezza della cricca dell’energia potenziale, non possiamo non evidenziare che J e G
sono la stessa cosa e quindi è possibile descrivere le curve G,R analogamente a JR,R (in figura 2
dove a R è sostituito JR)ed è importante perché il significato di J è più completo di quello di G, il
quale richiede un comportamento lineare elastico del materiale mentre J è valido sempre e quindi è
uno strumento molto adottato per studiare il comportamento di un elemento criccato e delle
vicissitudini che si verificano nell’intorno dell’apice della cricca anche se non è applicabile la teoria
elastica e cioè per piccole deformazioni plastiche. (slide 23) L’aver detto che J è valido anche in
campo plastico ci da il “là” per affrontare la verifica dell’esistenza di una zona plastica nell’intorno
dell’apice della cricca, zona di cui si verifica l’esistenza immediatamente poiché la tensione per R
che tende a 0 va a ∞ sia in direzione X che in direzione Y e quindi i risultati trovati non possono
essere validi in tale regione. Ci si chiede quindi fino a che distanza è valida la teoria elastica.
Prendendo in esame la figura 1, e quindi la σy, applicando il modello di Irwin si ricava il raggio
plastico r*p in corrispondenza del quale la σy è uguale a quella di snervamento e quindi al di sotto di
esso c’è la zona plastica e sopra quella elastica. In realtà però questo raggio deve essere corretto e
quest’ approssimazione la si rappresenta graficamente (figura 1) introducendo una circonferenza di
diametro r*p dall’apice della cricca, che rappresenta la zona plastica. Quindi il diagramma è
sbagliato poiché al di sotto del raggio plastico la σy è costante e pari a quella di snervamento σys,
seguendo la teoria di materiale elastoplastico senza incrudimento. Quest’errore si evince dall’analisi
del diagramma, poiché l’area sottesa è pari al carico all’∞ e quindi se diciamo che non è più valida
questa zona del diagramma, l’equilibrio complessivo dell’elemento criccato non è più verificato.
Evidentemente se la parte tratteggiata in figura 1 deve essere eliminata e la σy non deve
ulteriormente crescere (materiale elastoplastico senza incrudimento) deve verificarsi che le ordinate
devono essere maggiori per verificare l’equilibrio energetico: ciò si ottiene shiftando la curva come
si vede in figura 1 di slide 24 e questo comporta che la zona a sigma costante aumenta (aumenta

32
cioè il raggio plastico)e da questo punto in poi si ottengono delle ordinate sempre maggiori. Il
problema ora è calcolare di quanto spostare il diagramma, e quindi calcolare l’effettivo raggio
plastico. Irwin notò che il maggior valore del raggio plastico corrispondeva alla maggior zona
plastica calcolata prima che noi avremmo se la lunghezza della cricca invece di essere a sia aeff
(vedi figura 2) e la differenza delta rappresenta proprio lo spostamento del diagramma. Introdusse
quindi il concetto di lunghezza di cricca fittizia come quella cricca che presenterebbe quel raggio
plastico calcolato in prima approssimazione. Dall’analisi della figura 2 quindi il raggio plastico è
rappresentato da delta più lambda dove quest’ultimo rappresenta il raggio plastico di prima
approssimazione della cricca fittizia mentre r*p rappresenta il raggio plastico di prima
approssimazione della cricca effettiva. Poiché delta di solito è molto piccolo rispetto ad a si ottiene
che non cambia molto tra la cricca effettiva e quella fittizia e che lambda e quasi uguale a r*p. A tal
punto l’unica cosa da calcolare qual è la maggior lunghezza della cricca fittizia che consente di
avere l’equilibrio delle aree. In base a ciò a sinistra di lambda la sigma è costante e quindi pari a
sigmas *(delta+lambda), quantità che deve essere uguale che pare da delta e arriva a lambda (in
base a ciò l’integrale va da 0 a lambda), da ciò si ricava che delta è uguale a r*p. Da tale analisi si
evince che l’errore commesso sul raggio plastico di prima approssimazione è del 50%. (slide 24)
Per cominciare a tenere conto di un campo con comportamento plastico il SIF sarà corretto con
l’aggiunta del raggio plastico fittizio dal momento che stiamo parlando di una lunghezza fittizia. Per
arrivare ad un SIF più accurato per successive iterazioni. Quando abbiamo studiato la cricca
abbiamo tenuto conto dell’apertura delle labbra sotto un carico infinito e abbiamo considerato il
cosiddetto COD, che è l’apertura (2 volte lo spostamento) della cricca al centro; di conseguenza,
considerando un COD variabile, all’apice della cricca, esso deve essere pari a 0. Questo non è vero
però nel caso di deformazione plastica poiché nell’apice della cricca, gli spostamenti non sono nulli,
e si ha uno stiramento dell’apice stesso. L’ apertura della cricca all’apice per effetto della plasticità
è detto CTOD, misurato in seguito a un COD, dato dall’apertura del provino (figura 2) il quale da
una trave diventa una bilatera e dal suo studio si può risalire all’abbassamento e cioè all’angolo di
inclinazione della trave e quindi il punto a stiramento nullo. Per differenza tra il punto ad
abbassamento nullo e la semilunghezza della cricca stessa, si può risalire al CTOD e quindi al SIF.
Passando alla slide 25, si può precisare che r*p rappresenta la maggior lunghezza della cricca fittizia
e che la zona plastica corrisponde circa al 30% della lunghezza della piastra e ciò dipende oltre dal
materiale, anche dalla lunghezza linearmente e dalla sigma remota quadraticamente. Questo fa si
che nello studio della propagazione di una cricca è evidente che la lunghezza della cricca aumenta
sempre e ciò è dovuto ad una ridistribuzione degli sforzi perché si vanno a modificare le sezioni
resistenti e praticamente mentre la lunghezza della cricca aumenta sempre, davanti ad essa avanza
sempre più un fronte di zona deformata plasticamente. Possiamo quindi supporre come rotto un
componente in cui è presente una discontinuità fisica (si supera la tenacità) ma è anche vero che se
tutta la struttura si plasticizza, cominciamo ad avere una resistenza sempre più bassa a parità di
deformazione: si accetta quindi come convenzione che un componente è rotto quando è in parte
criccato e plasticizzato per tutta la rimanente zona resistente. Si precisi che comunque tutto questo
dipende dall’intensità della tensione applicata e che la relazione per il calcolo del raggio plastico
fittizio è valida solo in salita e quindi la storia di carico ha un’importanza fondamentale
(meccanismo di propagazione della cricca). Successivamente, nel calcolo del COD quindi
considerando solo la zona criccata, senza considerare la zona plasticizzata, si commette un errore di
circa il 20%. In conclusione il metodo di Irwin ci da in modo semplice la determinazione della zona
plastica ricorrendo ad uno studio del diagramma, cioè confrontando tale diagramma con la curva
tensione-deformazione del materiale. (slide 26) Quello di Irwin non è il solo modello che fornisce il
raggio plastico dal momento che esiste anche il modello di Dugdale, il quale è meno immediato ma
sempre più comune. Supponiamo di avere la solita cricca di lunghezza 2a su una piastra sottoposta
ad un carico all’infinito e consideriamo una cricca fittizia di lunghezza 2a+la parte plastica, come
prima: l’unica differenza è che ρ=δ(figura 1). Se avessimo questa cricca di semilunghezza a+ρ per
effetto della azione esterna questa cricca si aprirebbe, se non si aprisse è perché in questa zona la
33
tensione di snervamento (poiché siamo in campo plastico) la mantiene chiusa. Dugdale si chiese
quanto valeva il SIF all’estremità della zona plastica, ma poiché siamo all’interno del materiale il
SIF=0, perché la cricca è chiusa, ma poiché il SIF è dato dalla somma di Kσ della cricca fittizia
sottoposta a carico infinito e kρ dovuto all’effetto delle sigma di snervamento che lo vanno a
chiudere, da tale relazione si ricava quindi il valore di ρ. Si può usare anche la formula
approssimata in basso. Tali formule per il calcolo di ρ sono approssimate in quanto abbiamo
considerato uno stato tensionale monoassiale: lo stato tensionale invece all’apice della cricca è
biassiale (SPT) o triassiale (SPD). (Slide 27) Il saperese un materiale si è plasticizzato o meno in un
punto non può prescindere dall’accettare un certo criterio di plasticizzazione (ad esempio Henky-
Von Mises) che consente di calcolare la tensione di confronto equivalente al comportamento del
materiale in campo monoassiale e quindi siccome stiamo studiando la plasticizzazione se la nostra
sigma di confronto è uguale a quella di snervamento, funzione delle tensioni nelle tre direzioni
principali ottenute da Vestergard, si è vicini alla plasticizzazione. A questo punto è possibile o
ricavare la σs in SPD o SPT oppure, conoscendo la σs e comparendo una commistione tra distanze e
direzioni, si può calcolare il raggio plastico come funzione della direzione e ci si accorge che la
distanza dall’apice della cricca alla quale inizia la plasticizzazione è diversa nelle diverse direzioni.
(slide 28) Dalla figura 1 si nota che in SPD la zona di plasticizzazione è a forma di 8, mentre in SPT
è a forma di fagiolo e ciò che bisogna notare che la dimensione della zona plasticizzata in uno stato
piano di deformazione è molto più piccola della dimensione della stessa zona nel caso di stato piano
di tensione. Ciò è funzione delle ipotesi che abbiamo fatto circa la condizione di plasticizzazione:
infatti se al posto della condizione di Henky avessimo utilizzato Tresca, avremmo ottenuto delle
zone diverse e la scelta tra le due dipende dalle ipotesi che si fanno in partenza. Allo scopo è
consigliata la visione di film giapponesi degli anni 50…Quindi in generale la scelta si basa su
un’approssimazione dll’idea e della legge fisica ad essa correlata: in altre parole ci saranno dei
materiali per i quali il comportamento di plasticizzazione sarà en rappresentato dal criterio di
Tresca, altri da Henky. (Slide 29) Supponendo che sia valida l’ipotesi di Henky, si analizzi
l’estensione della zona di plasticizzazione in corpi criccati: supponendo diavere una piastra come
quella in figura 2, andando a misurare l’estensione della zona plastica nell’intorno della cricca si
ottiene che il volume plasticizzato ha un’estensione maggiore in superficie poi naturalmente si
riduce e diventa costante nella parte centrale; ciò succede in piastre di almeno un certo spessore.
Questo è illuminante nei confronti di un corpo sollecitato dall’esterno: se non c’è carico applicato
sulle facce, anche le tensioni sono nulle e perciò (figura 1-a) la prima è caratterizzata da sigma=0 ed
il materiale è libero di contrarsi. La superficie si presenterà quindi curvata perchè può avere delle
ε≠0 e quindi σ=0. Lo stato di tensione potrebbe quindi essere definito piano o meglio ci si avvicina
molto, perché comunque la sigma e la Tau sono uguali a 0; per meglio dire si ha lo stato piano di
tensione sul pelo libero della piastra dal momento che non si mantiene piano per tutto lo spessore.
Nella zona immediatamente superficiale e subsuperficiale, la zona di plasticizzazione deve
somigliare molto a quella che corrisponde allo stato piano di tensione. Se ci si trova invece
all’esterno (fig 1-b) se lo spessore è abbastanza grande, lo stato di deformazione che si ha nella
parte centrale lontano da imbotti, tende a essere a deformazione piana e la zona plasticizzata tende
ad essere molto più piccola. In generale ciò vuol dir che si avrà una zona sollecitata in maniera tale
da somigliare ad uno stato piano di deformazione finchè il materiale nel punto considerato non
risente della prossimità delle superfici e si accorge che l’azione da sinistra è diversa da quella che
viene da destra e si deforma di conseguenza. In questo modo c’è poi il passaggio graduale tra uno
stato piano di deformazione a uno stato piano di tensione. Ciò è molto importante perché tutto
questo su una piastra molto sottile non ha senso di esistere perché man mano che cresce l’effetto
della lontananza da queste superfici aumenta l’effetto della vicinanza da quest’altra e quindi non si
ha proprio modo di arrivare a uno stato piano di deformazione e tutta quanta la piastra avrà una
strizione locale molto pronunciata dovuta a una ampia zona plasticizzata. Se invece abbiamo un
“piastrone” ci sarà una grande zona centrale sulla quale non si sente l’effetto delle superfici e nella
quale la zona plastica è di dimensioni ridotte anzi si dirà che in questo caso la zona in cui lo stato di
34
tensione è più o meno piano sarà modestissima e la generalità di questo componente si comporterà
come un corpo sottoposto a deformazione piana e ci sarà una zona plasticizzata intorno all’apice
della cricca molto ristretta (figura 3). (slide 30)Si precisi che tale analisi è partita calcolando
l’estensione della zona plastica con il criterio di massima sollecitazione (sigmay=sigmas); poi si è
calcolata l’estensione della zona plastica con un criterio più logico, cioè praticamente si sono
ricavate le tensioni principali e da queste siamo risaliti all’estensione della zona plasticizzata.
Ritornando alla slide 27, c’è da dire che quando si è scritto l’espressione del rp(θ) compare il SIF,
funzione della sigma remota (tensione all’infinito). Che legame c’è tra il remote stress e
l’estensione della zona plastica e per quale valore del remote stress per il quale si inizia ad avere
una plasticizzazione. In pratica questo si fa assegnando la sigma1 e vogliamo sapere a quale valore
bisogna arrivare per avere la plasticizzazione. Assegnando sigma1 posso esprimeresigma2 e sigma3
in sua funzione tramite coefficienti n e m che non sono altro che rapporti delle sigma delle direzioni
principali. Fatto ciò si può ricavare la sigma1 di plasticizzazione in funzione di sigmas che non è più
funzione della distanza (dal momento che, contenendo il SIF, facendo i rapporti si semplifica) ma
solo dell’angolo θ. Da tale relazione si ricava nelle varie direzioni (al variare di n e m) come variare
sigma1 in corrispondenza della quale comincia la plasticizzazione (non dice a che distanza avviene).
Le sucessive relazioni possono venir spiegate poiché siccome le tensioni aumentano man mano ci si
avvicina all’apicedella cricca sela zona plastica in SPD comincia quando la tensione è 3 volte quella
di snervamento, mentre in SPT bastava che arrivava a quella di snervamento, è evidente che la
plasticizzazione nel primo caso avviene ad una distanza molto più vicina all’apice della cricca
rispetto all’SPD e quindi la zona plastica in uno stato piano di deformazione è molto più piccola
perché viene innescata sotto tensioni molto più elevate. (slide31) Ciò viene evidenziato in figura 1
dove il primo diagramma rappresenta il caso in cui sigma1 (sigmay) è uguale a sigmas, mentre nel
secondo sigma1 è uguale a 3sigmas; quindi se si deve plasticizzare in stato piano di deformazione,
questa plasticizzazione interessera sempre un volume assai più contenuto. Quest’idea ha dato
originea quello che si chiama PCF(indicato con α), che non è altro che la tensione massima che si
può avere rapportata alla tensione di snervamento e che nel caso in esame è sigma1/sigmas.
Ritornando alla figura 1 c’è da sottolineare che i due diagrammi sono diversi non perché le zone
lastiche sono diverse ma per il grado direaltà con cui sono stati tracciati. Il secondo è un diagramma
molto più reale perché evidenzia un raccordo e una progressiva riduzione a zero. Abbiamo visto che
la sigma1 per la quale si comincia ad avere la plasticizzazione è pariad 1 nel caso di stato piano di
tensione e 3 nello stato piano di deformazioni. In pratica il PCF è compreso tra 1 e 3 poiché
all’intrno di un corpo si hanno contemporaneamente entrambi in relazioni a percentuali dispessore
differenti: l’effetto dellospessore quindi si deve necessariamente far sentire e le interazioni tra i
diversi gruppi e quindi porterà delle variazioni in questi valori standard determinati. Si è sempre
detto in base allateoria lineare elastica della frattura che in corrispondenza di una certa sigma si
aveva un dato valore del SIF e la cricca partiva quando superava il valore della tenacità, la quale
varia ed è funzione dello spessore e non solo in funzione del materiale. Tracciando un diagramma
della tenacità al variare dello spessore si trova che la curva di tenacità ha l’andamento di figura 3.
Questo andamento è giustificato dal fatto che poiché ho una piastra molto sottile, questa è molto
plasticizzata dal momento che ha uno stato di tensione piana e avrò un certo valore del SIF. Avendo
invece una piastra molto spessa, questa è totalmente in stato di deformazione piano perché la parte
interna è prevalente sulle striscioline esterne e quindi di nuovo ho un comportamento alla frattura
che è dettato dal fatto che il volume di materiale è in stato di deformazione piana e quindi avrò un
altro valore stabilizzato del SIF. La zona compresa tra B0 e Bs rappresenta quella zona nella quale
va a ridursi quella parte in stato piano di tensione e va ad aumentare la zona interessata da uno stato
piano di deformazione. Si precisi che i pennacchi rappresentano valori della tenacità non danno
valori affidabili a causa degli spessori modesti e che quando si parla di tenacità in generale ci si
riferisce alla tenacità in stato piano di deformazione. (slide 32) In figura 1 è rappresentato un
provino standard per una prova di frattura statica in cui è presente un innesco alla frattura o un
innesco molto grande che provochi una rottura rapida. In figura 5 è rappresentato un provino della
35
ASTM estratto da un componente più grande mentre in figura 1 è un provino standard sul quale
vogliamo che si crei una cricca superficiale per fatica: tagliando in corrispondenza della cricca, si
ottiene la figura 2 in cui si nota che si è creato un intaglio non uniforme meno profondo al centro e
più in superficie. In figura 3 invece si ha un provino adatto perflessione su 3 punti in cui il carico è
applicato come se fosse al centro di una trave appoggiata-apoggiata in corrispondenza dell’intaglio
della cricca. C’è da considerare che, nel momento in cui abbiamo dei risultati di una prova su un
provino bisogna dichiarare le modalità di estrazione del provino dalla direzione di laminazione.
(slide 33) In figura 2 è rappresentato un codmetro, un apparecchio che si adopera per misurare il
COD tramite degli inviti effettuati sul provino in corrispondenza dell’intaglio. Sulle due lamine che
lo compongono vi sono degli estensimetri che misurano la curvatura delle lamine. (slide 34) Per
finire la parte statica della meccanica della frattura si può dire che esiste una certa differenza tra la
resistenza di una piastra e la resistenza dellapiastra reale, perché la piastra reale può essere soggetta
a condizioni di crisi diversificate (criteri multi-fader). In tale analisi si prenda in esame la
plasticizzazione copleta della piastra che ne impedisce il suo sfruttamento completo. Facendo
riferimento alla figura 2 si supponga di avere un diagramma lunghezza della cricca-sigma (residual
strenght) in relazione ad una piastra di dimensioni w. Se si ha un materiale relativo allo spessore di
piastra che sto considerando, posso fare la curva a kc costante (tenacità costante) e la curva sarà
simile a quella tratteggiata: se il punto di funzionamento è al di sotto di questa, la piastra non si
rompe, mentre non appena la raggiungo, la cricca è in condizione di incipiente propagazione
plastica. Sopra la curva non è possibile l’equilibrio perché praticamente è stata superata la tenacità e
quindi la cricca sicuramente si propaga. Si analizzi ora la curva corrispondente alla plasticizzazione:
siccome l’area resistente è (w-2a)*b se sigma è pari a sigma in corrispondenza di (w-2a) è pari a
quella di snervamento, si sta plasticizzando, se è al di sotto, non si sta plasticizzando. Con ciò si
vuole dire che la tensione in corrispondenza della quale si verifica la plasticizzazione in questo
diagramma può essere rappresentata come una retta che passa per i punti (0;sigmas) e (w;0): nel
primo punto infatti la cricca ha lunghezza 0 ma l’elemento è sollecitato dalla tensione di
snervamento all’infinito mentre nel secondo punto, sia la sezione resistente (perché a=w e c’è
discontinuità fisica) che la tensione applicata sono nulle. Tale retta è detta di snervamento: i valori
al di sotto assicurano che la piastra è ancora in campo elastico, valori superiori dicono che la piastra
è in campo plastico. Se ora si traccia la curva del Kc e la si sovrappone alla retta di snervamento,
vediamo che sarà generata una zona centrale nella quale la curva di Kc è inferiore alla retta, mentre
ci saranno altri tratti in cui la curva Kc costante è a superiore alla retta: ad esempio a sinistra, per
piccole lunghezze della cricca si dovrebbero applicare delle tensioni molto elevate per avere la
frattura, in altre parole in tali zone la piastra si plasticizza per carico dal momento che esso è molto
vicino al valore di snervamento. Per lunghezze elevate, per dar luogo alla frattura, sono necessarie
tensioni basse però è prevalente l’effetto di plasticità perché in effetti anche con carichi molto bassi,
la sezione resistente è modestissima. Volendo considerare un criterio multi-fader che tiene conto di
fratture e plasticizzazione, se il punto di lavoro si trova nelle zone tratteggiate, dovrò considerare il
criterio della plasticizzazione; se si trova nella parte centrale, dovrò tenere conto della frattura. In
modo approssimato si può considerare la curva costituita dalle tangenti alla curva kc costante
passanti per i due punti sopra indicati le cui tangenti sostituiscono i tratti della retta di snervamento.
Ecco perché quando si hanno dei componenti e si va a vedere il diagramma sigma-a, si ha un
andamento simile alla figura 1 slide 34 dove le curve vanno verso la tensione di snervamento; si
precisi che in figura sono anche rappresentate le curve R corrispondenti all’accrescimento della
cricca alle condizioni di danneggiamento. Un caso particolare è la figura 4 dove sono rappresentate
due curve di tenacità, una di un materiale ad alta tenacità (curva tratteggiata:che non cederà mai per
frattura ma per snervamento perché si trova sempre al di sopra della retta di snervamento), l’altra
con tenacità bassa. A tal punto indipendentemente dal fatto se la cricca si possa propagare fino a un
certo punto in maniera stabile e poi instabile, deve interessarci che durante l’esercizio del
componente comunque la cricca per fatica si ingrandisce e quindi l’effetto della fatica sul
componente criccato comporta un danneggiamento progressivo interiore del componente fino a che
36
non interviene la morte del componente. Da ciò si evince che parlare di frattura e di fatica di un
componente rappresenta la stessa cosa, ma bisogna ricordarsi che la frattura può propagarsi anche
senza fatica, ma la fatica nasce esclusivamente in seguito all’allungamento di una frattura. E’
importante ora vedere come la frattura si propaghi per effetto della fatica (studio della propagazione
per fatica della frattura) ciò vuol dire che sotto un carico fluttuante (affaticante) si nota che la cricca
pian piano cresce con velocità sempre crescente fino a che si determina la rottura del componente (
poiché si è arrivati alla lunghezza critica); si precisi anche che più il componente è spesso più è
veloce la propagazione della frattura. Negli ultimi tempi le tecniche di prevenzione delle cricche
hanno fatto passi da gigante e quindi è possibile ricavare le curve di propagazione delle cricche e le
curve della resistenza residua anche tenendo conto delle capacità del particolare metodo di
rilevamento della cricca. In figura 2 slide 35 è rappresentato il sistema di calcolo del criterio feel
safe, cioè il componente deve essere sicuro anche quando è rotto; si supponga che a un certo istante
iniziale si verifica una cricca e che si propaghi fino al tempo b e cioè fino a quando la resistenza
residua è scesa troppo (limite di non sopportazione). L’intervallo tra a e b è l’intervallo nel quale
bisogna concentrare tutti gli interventi di manutenzione allo scopo di rintracciare la cricca e
eliminarla. Si precisi che questo metodo non va molto bene perché man mano che ci si avvicina alla
vita finale del prodotto, l’intervallo a-b va rimpicciolendosi e quindi le operazioni di manutenzione
devono essere sempre più ravvicinate. Altra idea è stata quella dell’utilizzo della ridondanza che si
basava sull’utilizzo di componenti in parallelo (servono 30 chiodi?...ne metto 60! Alias two is megl
che uan…). Il difetto di questo metodo è che nel caso di rottura di uno dei due componenti, l’altro
doveva sopportare il 100% del carico all’improvviso, fino a non utilizzare più questo metodo: oggi
si utilizzano maggiormente verso progetti damage tolerance, verso strutture che sono capaci di
sopportante il danno entro una certa entità stabilita (simile al feel safe) e quindi si è dovuto
introdurre una politica di manutenzione atta a non raggiungere alla rottura del componente a causa
del raggiungimento di questa entità.
Lezione del 22/02
Sotto carichi affaticanti, in generale vi è un aumento della lunghezza della cricca e tale aumento
dipende ad esempio dallo spessore della piastra: si vede che man mano che lo spessore è maggiore,
la propagazione della cricca è più veloce (figura 1 slide 35 sotto carico alterno simmetrico). Il tutto
dipende anche dai livelli di carico: nella slide 36 figura 1si nota che a livelli di carico maggiori
corrisponde una più veloce propagazione della cricca. In figura 2 invece si comincia ad avvicinarsi
in modo più attuale allo studio di propagazione della cricca in cui il numero di cicli e la lunghezza
della cricca sono rappresentati mediante diagrammi bilogaritmici tutto ciò in funzione delle grandi
variazioni che si hanno nel tempo e quindi a parità di lunghezza di cricca occorre un numero di cicli
minore all’aumentare del carico. Un’osservazione da fare è che invece di confrontare le lunghezze
con la durata calcoliamo le velocità di propagazione in termini di da/dN quindi come allungamento
per ciclo, vediamo che questa velocità non dipende molto dalla lunghezza della cricca, ma dipende
dal SIF: se si fa un diagramma bilogaritmico sulle cui ordinate ci sono le velocità di propagazione e
sulle ascisse le variazioni del SIF nel ciclo io ottengo una dipendenza lineare (figura 3): il deltaK si
spiega perché, considerando un ciclo, ci sono dei valori minimi e massimi della sigma che portano a
un SIF minimo e massimo; altra cosa da osservare è il fatto che il deltaK per un determinato carico
cambia perché varia la lunghezza della cricca a. In realtà questo diagramma rappresenta solo una
parte del comportamento generale che è mostrato in figura 4, dove la figura 3 rappresenta la parte
centrale della curva e vi è un deltaK al di sotto del quale la propagazione non avviene dal momento
che la velocità è quasi nulla. Quindi se il carico è quasi statico, deltaK molto basso (o per basso
livello di carico o per valori vicini di K massimo e K minimo e quindi sigma), non vi è
propagazione della cricca: tale valore prende il nome di deltaK di soglia. All’altro estremo vi è un
deltaK per il quale la velocità diventa infinita ed è il deltaK massimo è uguale alla tenacità e cioè la
propagazione si stabilizza e la frattura si acutizza. Per quanto riguarda il tratto centrale rettilineo, la

37
formulazione utilizzata è la legge di Paris-Erdogan in cui C e n sono due parametri che dipendono
esclusivamente dal materiale. Il primo difetto di tale legge è che considera solo il tratto rettilineo e
non tiene conto della variazione di R che sposta le curve velocità di propagazione che
sostanzialmente si spostano soltanto senza deformarsi (figura 1 slide 38) e più mi riporto a carico
statico più ci si sposta verso sinistra. Sono quindi state proposte soluzioni alternative per quello che
riguarda la legge di propagazione e una delle più celebri è quella di Forman, che si differenzia al
denominatore dove compare la differenza tra la tenacità e il K max del ciclo che dimostra che se ci
si avvicina nel ciclo alla tenacità, la velocità di propagazione della cricca, schizza; c’è inoltre il
termine (1-R) che tende a rappresentare l’effetto di spostamento della curva. Nel tentativo di trovare
altre rappresentazioni, ci si è imbattuti in un fenomeno particolare. In figura 1 slide 39 si nota come
propagherebbe la cricca sotto carico S1 e analogamente sotto carico maggiore S2. Ovviamente se
l’elemento è sottoposto prima a un certo numero di cicli di un carico e poi si passa a un altro livello
di carico, la curva di propagazione dipenderà da come ci si alterna e cioè con quale ordine si
applicano i carichi (fig 1-d: si applica prima il carico S1 e poi si traccia la parallela al carico S2 a
fine ciclo, il contrario in figura 1-e). Questa analisi rappresenta la legge di accumulo del danno
attraverso l’analisi della propagazione della frattura. Supponiamo di voler seguire la curva di
propagazione di una frattura sottoponendola a un carico ciclico uniforme si ottiene così la parte
tratteggiata di figura 2; ad un certo punto siccome si stava studiando come l’interazione dei cicli di
carico influisse sulla velocità di propagazione si pensò di fare un ciclo molto più violento e si notò
che la velocità di propagazione si abbassò; nel caso c il rallentamento è ancora più evidente dal
momento che si considera un ciclo tutto positivo. In figura 3, si nota che togliendo i carichi più
gravosi la durata aumenta. Anche se tale fenomeno è strano, esso spiega il fenomeno del Load
Interaction (soprattutto dal confronto tra le curve B e C di figura 2) dipendente dall’effettiva
successione dei diversi cicli di carico riguardo al fenomeno di propagazione della frattura e quindi
della fatica. In figura 1 slide 40, è rappresentata la differente propagazione chesi ha in caso di
sovraccarico a parità di ciclo e nel secondo caso si nota che il grado di rallentamento è molto più
sensibile ed il tratto rettilineo può essere anche molto lungo, segno che la cricca rimane costante nel
tempo oppure ha una pendenza bassissima e cioè un forte rallentamento della velocità di
propagazione. In seguito si applicò un secondo overload per voler vedere cosa succede quando la
distanza in termini di tempo tra gli overload varia. L’azione ravvicinata tra due overload aumentava
il rallentamento (figura 2), che era massimo per una certa distanza tra gli overload e man mano che
si allontanavano, tale rallentamento era minore. In queste condizioni la teoria alla base della
meccanica della frattura non riusciva a spiegare il fenomeno, che fu spiegato con l’introduzione
della teoria della chiusura della cricca (avanzata da Helber), la quale si basa sul principio che per
avere la propagazione di una cricca, questa si deve aprire, altrimenti è impossibile separare i lembi
della cricca. Per spiegare ciò si precisi che la meccanica della frattura parte dal presupposto che
tutto l’elemento criccato segue un comportamento lineare elastico del materiale; ciò non è possibile
perché c’è anche una zona a comportamento plastico (dipendente dall’ampiezza della cricca)
intorno all’apice. A tal punto l’ipotesi avanzata da Helber è che la cricca genera una zona plastica
sul fronte che è circondata da un volume di materiale elastico che vorrebbe ritornare a deformazione
nulla e quindi il materiale elastico tende a premere sulla zona plastica per chiudere la cricca (dal
momento che il volume di materiale plasticizzato tende ad occupare uno spazio maggiore di quanto
gli compete perché è deformato). Quindi tutte le labbra della cricca sono caratterizzate da zone
plasticizzate che il volume elastico circostante tende a chiudere. Più è elevato il carico e più grande
è la zona plastica che si forma e maggiori saranno le azioni di chiusura determinate dal materiale
elastico circostante. L’overload quindi creando una zona plastica notevole rallenta la propagazione
della cricca e ciò non cambia fino a quando non arriva un nuovo carico che riesce a superare il
precedente. La chiusura della cricca può essere determinata anche da difetti di corrosione che
creano delle sfaldature superficiali che vanno a incunearsi nelle labbra e impediscono la
propagazione (figura 3). Una volta capito il meccanismo della chiusura sono stati proposti molti
modelli per l’interpretazione e previsione della durata di un componente criccato e tra questi si
38
ricorda quello di Wheeler: supponiamo di avere una cricca di lunghezza a0 che viene colpita
dall’overload che introduce una zona plastica di diametro rp0 (figura 2, slide 41). Si vede che dopo
molto tempo questa cricca è avanzata con fatica fino a una lunghezza ai e sotto il carico abituale si
formerebbe una zona plastica di lunghezza rpi più piccola, in altre parole si forma una zona plastica
completamente contenuta in quella precedente. Con l’aggiunta di un secondo overload, la zona
plastica formatasi in seguito a questo, si sposta verso destra uscendo dalla zona plastica dovuta al
primo overload. In altri termini sotto la cricca di semilunghezza a0 è arrivato un overload, si è
formata una zona plastica di ampiezza rp0. Se la nostra cricca ha lunghezza ai, il raggio plastico
corrispondente avrà ampiezza rpi, valori ottenuti dalle formule sotto la figura 1. Il fenomeno del
ritardo, dovuto a una lentissima propagazione, finchè lambda sarà maggiore di rpi. L’idea di
Wheeler fu che la propagazione poteva essere studiata in modo da assumere che finchè la cricca si
propaga tutta all’interno della zona plastica prodotta dall’overload precedente, si propagherà con
una velocità più bassa pari a φ volte quella velocità che si aveva in assenza di ritardo. Da tale analisi
ciò che deve risultare chiaro è che finché non si considera la load interaction, cioè non si
considerano fenomeni di ritardo, si va a integrare la legge di Paris e si risolve per via differenziale
l’equazione; al contrario, considerando il ritardo, si deve procedere solo per via sperimentale
analizzando ciclo per ciclo per vedere quand’è che si forma il raggio plastico più grande, quando si
verifica la chiusura della cricca. E’ evidente quindi che lo studio della propagazione deve essere di
tipo numerico. La rivoluzione in questi modelli fu rappresentata dallo strip yeld method da
Newmann, che aveva fatto un modello il più possibile completo: questo rappresentava una sorta di
elementi finiti in scala ridotta nel senso che diceva che davanti alla cricca c’erano degli elementini
di materiale plastico, barrette, fino alla fine della zona plastica: si poteva dividere tutta la zona in
una parte elastica (regione 1 slide 42), una parte plastica (regione 2 sul fronte dell’apice della
cricca) e una parte plastica (regione 3 sulla scia). Newmann si trovò a calcolare quale doveva essere
il carico minimo per il quale le labbra della cricca si aprivano; introdusse i concetti di opening stress
e opening SIF (Sif che si determina in condizioni di incipiente apertura) con l’idea che se il ciclo
che sta per arrivare produce uno stato tensionale minore di quello necessario per determinare
l’apertura della cricca non viene proprio considerato, poiché non può produrre la propagazione della
cricca. Il modello è nettamente diverso da Wheeler perché andiamo a determinare oltre al raggio
plastico, se il carico riesce a determinare l’apertura o meno. Da ricordare è anche il modello Nasgro
dalla quale si ricava una legge di propagazione che richiede una conoscenza notevole di costanti del
materiale e questo è il motivo per cui si può utilizzare solo in pochi casi. La legge utilizzata è simile
a quella di Paris:da questa nuova legge si evince che se il deltaKth è maggiore del deltaK non si può
avere propagazione (tenendo conto del primo tratto della curva di propagazione), analogamente al
termine elevato alla q (che tiene conto dell’altro tratto); inoltre tiene conto di R e del ritardo,
quantità (1-f) dove f è il rapporto tra il SIF all’apertura della cricca e il SIF massimo del ciclo e
dipende dal Plastic Constraint Factor PCF, dalla sigma massima del ciclo e dalla tensione di
scorrimento plastico. Il deltaKth è considerato rispetto a valori sperimentali (nella slide vi è
l’esempio con R=0) e al suo interno è presente il termine a0 che è un fattore di correzione per le
piccole crepe. In alternativa al Nasgro, esiste anche ilmodello Willenborg, simile a quello di
Wheeler. Questo modello considera il progredire della plasticizzazione in modo molto accurato: è
fondamentale che anche in questo modello se la zona plastica sta all’interno della zona plastica
dovuta ad un overload, la velocità di propagazione è più bassa di quella che normalmente si
avrebbe; la seconda cosa è che il valore di R utilizzato per poter scegliere la curva da/dN in
funzione di deltaK è un R modificato, poiché non è sigma massimo/sigma minimo, ma è funzione di
k (dove compare la radice di sigma) e inoltre dal fatto che per tenere conto che c’è stato un
overload, willenborg introdusse un R effettivo che considerava i k ridotti di quello chiamato da lui
K residuo, dovuto al ciclo di overload verificatosi. Tutto si risolve con il calcolo di questo SIF di
ritardo (kr). A tal punto si introduca il valore Zol che rappresenta il raggio plastico dovuto ad un
overload in cui compare il K massimo dell’overload, la sigma di snervamento e il PCF per
l’overload. Dopo che è passato un certo periodo dall’overload, la cricca si è propagata di delta a
39
(figura 2-slid 44), quindi (Zol-delta a) è la lunghezza che si deve ancora percorrere per uscire: per
ottenere il K necessario per uscire da questa zona, bisogna riferirsi al primo termine della relazione
di Krw. In funzione di quest’ultimo si tiene conto del Kth e dello Shut-off (RS0) (inteso come
condizione di sicurezza oltre la quale non si recupera), per definire una quantità proporzionale per
ottenere il SIF di ritardo sfasato di Њ. A questo punto si trattino le piccole crepe e si precisi che si
inizia a trattare una cricca in ambito strutturistico quando la sua lunghezza è un decimo di
millimetro. E’ interessante interessarci alle piccole crepe perché sono l’inizio di grandi crepe e
quindi danni maggiori. Se si pensa di applicare la legge di Paris alle piccole crepe, si sbaglia perché
le piccole crepe si comportano in modo completamente diverso da quello finora trattato. In figura 1
slide 45 vi è un classico esempio di crepe lunghe e piccole: queste ultime sono rappresentate come
delle sfrangiature e se si studiano più da vicino ci si accorge che le piccole crepe si propagano anche
per deltaK minori al deltaK di soglia(figura 2) e che le piccole crepe si propagano con velocità
maggiori di quelle che competerebbe loro a parità di SIF. Si precisi che la velocità della piccola
cricca che sta diventando grande è in generale una curva decrescente (figura 3): tale riduzione può
sfociare in un arresto e la cricca non si propaga più o può riprendersi man mano che aumenta il
ciclo di carico e la cricca quindi diventerà lunga e il suo comportamento sfocierà nella curva
principale corrispondente al comportamento delle cricche lunghe. Un criterio molto chiaro per lo
studio delle piccole crepe è stato proposto da un indiano il quale ha proposto uno studio
biparametrico: la propagazione dipende oltre che dal deltaK, anche dal K massimo cioè dal valore
massimo del carico che si ha nel ciclo puntualizzando che in caso di piccole crepe è preponderante
l’influsso del K max dal momento che dipende dalla singolarità mentre man mano che ci si
allontana dalla singolarità e la cricca si allunga, diventa preponderante l’influsso del deltaK. Il
problema principale è fare un calcolo a durata sulle piccole crepe e a risolvere ciò ci ha pensato un
arabo (Saddam Lebbiolao) aumentando la lunghezza fittizia della cricca. L’ottica con la quale si
guarda tutto il problema oggi risulta alterata dal momento che si suppone che in un componente
meccanico siano presenti già al suo interno piccole crepe e che con varie storie di sollecitazioni a
cui è sottoposto molte di queste piccole crepe tendono a crescere. Gli studi condotti sulla
propagazione delle piccole cricche intorno agli anni ’70 ed erano fondamentalmente di natura
statistica dal momento che si sollecitava un provino e ci si focalizzava su una cricca qualora
nascesse e fosse individuata e ne si seguiva la propagazione nel tempo, tracciando così la curva di
propagazione e ricavare al parametro C e n della legge di Paris, diversi per ognuna delle cricche.
Successivamente hanno potuto registrare per ogni cricca l’istante al quale la lunghezza di cricca
arrivava a un certo valore. In figura 1, slide 46, la lnghezza di cricca a cui sono arrivati è pari a 1,25
mm e hanno registrato il tempo necessario (in cicli o ore) a ciascuna cricca per raggiungere questa
lunghezza. In questa maniera si è potuto rintracciare la curva di distribuzione nel tempo affinchè la
cricca arrivasse alla lunghezza di 1,25mm (curva TTCI): tale curva presuppone il fatto che una
cricca è presente nel componente se ha una lunghezza di almeno 1,25 mm. Chiarendo meglio la
TTCI è una curva che indica la distribuzione dei tempi necessari ad avere una certa lunghezza, ma
tale distribuzione si ottiene seguendo la propagazione delle cricche: allora se si prende un C medio e
un n medio e si arriva all’istante t=0 partendo dalla distribuzione TTCI, si definisce qual è la
probabilità che in tale istante ci fossero cricche delle lunghezze di figura 1. Tale distribuzione
prende il nome di EIFSD. Si può fare anche una distribuzione simile fissando un tempo e
analizzando la distribuzione dei difetti che si possono avere dopo un certo tempo a partire
dall’EIFSD. In questo senso l’idea dell’EIFSD è legata strettamente alla qualità del prodotto. Tale
metodo però per un certo periodo è stato accantonato perché si era incapaci di generalizzarlo a
causa della forte dipendenza dai provini. Nell’ultimo periodo c’è invece un ritorno a questo metodo
per la progettazione in campo aeronautico oltre a poter prevedere in parte la propagazione dei difetti
per calcolare i tempi di manutenzione.
In fede
Alessandro Soprano
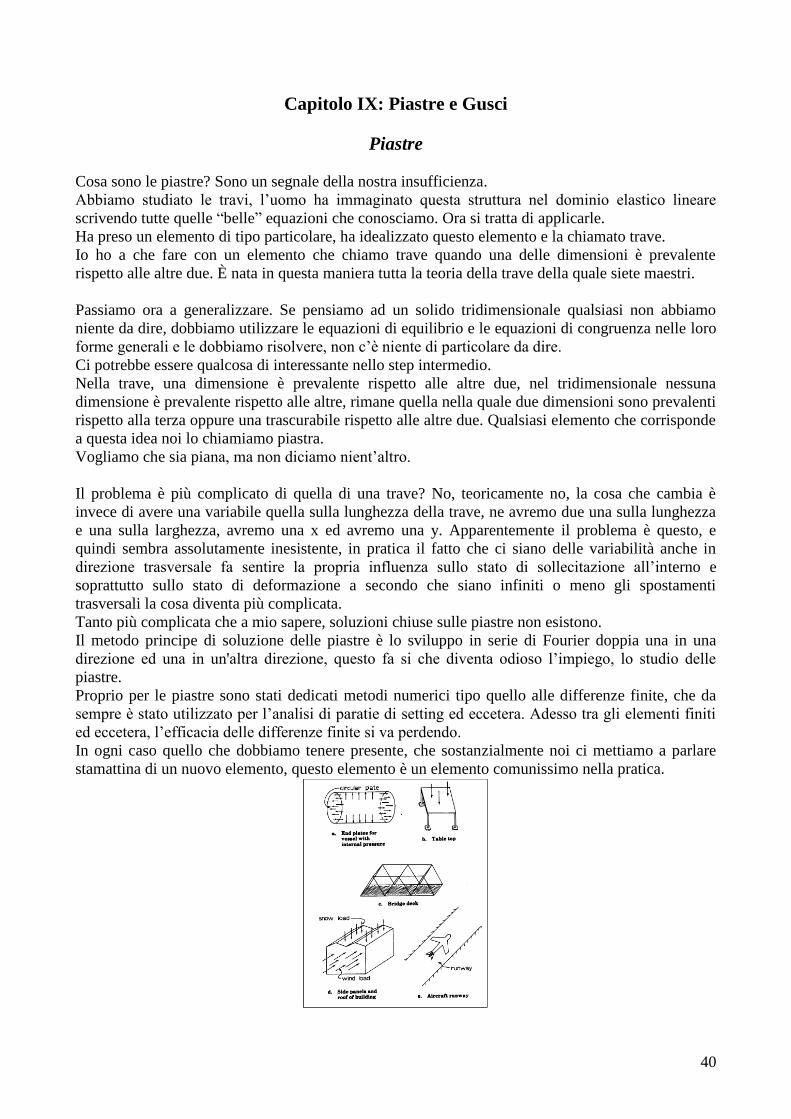
40
Capitolo IX: Piastre e Gusci
Piastre
Cosa sono le piastre? Sono un segnale della nostra insufficienza.
Abbiamo studiato le travi, l’uomo ha immaginato questa struttura nel dominio elastico lineare
scrivendo tutte quelle “belle” equazioni che conosciamo. Ora si tratta di applicarle.
Ha preso un elemento di tipo particolare, ha idealizzato questo elemento e la chiamato trave.
Io ho a che fare con un elemento che chiamo trave quando una delle dimensioni è prevalente
rispetto alle altre due. È nata in questa maniera tutta la teoria della trave della quale siete maestri.
Passiamo ora a generalizzare. Se pensiamo ad un solido tridimensionale qualsiasi non abbiamo
niente da dire, dobbiamo utilizzare le equazioni di equilibrio e le equazioni di congruenza nelle loro
forme generali e le dobbiamo risolvere, non c’è niente di particolare da dire.
Ci potrebbe essere qualcosa di interessante nello step intermedio.
Nella trave, una dimensione è prevalente rispetto alle altre due, nel tridimensionale nessuna
dimensione è prevalente rispetto alle altre, rimane quella nella quale due dimensioni sono prevalenti
rispetto alla terza oppure una trascurabile rispetto alle altre due. Qualsiasi elemento che corrisponde
a questa idea noi lo chiamiamo piastra.
Vogliamo che sia piana, ma non diciamo nient’altro.
Il problema è più complicato di quella di una trave? No, teoricamente no, la cosa che cambia è
invece di avere una variabile quella sulla lunghezza della trave, ne avremo due una sulla lunghezza
e una sulla larghezza, avremo una x ed avremo una y. Apparentemente il problema è questo, e
quindi sembra assolutamente inesistente, in pratica il fatto che ci siano delle variabilità anche in
direzione trasversale fa sentire la propria influenza sullo stato di sollecitazione all’interno e
soprattutto sullo stato di deformazione a secondo che siano infiniti o meno gli spostamenti
trasversali la cosa diventa più complicata.
Tanto più complicata che a mio sapere, soluzioni chiuse sulle piastre non esistono.
Il metodo principe di soluzione delle piastre è lo sviluppo in serie di Fourier doppia una in una
direzione ed una in un'altra direzione, questo fa si che diventa odioso l’impiego, lo studio delle
piastre.
Proprio per le piastre sono stati dedicati metodi numerici tipo quello alle differenze finite, che da
sempre è stato utilizzato per l’analisi di paratie di setting ed eccetera. Adesso tra gli elementi finiti
ed eccetera, l’efficacia delle differenze finite si va perdendo.
In ogni caso quello che dobbiamo tenere presente, che sostanzialmente noi ci mettiamo a parlare
stamattina di un nuovo elemento, questo elemento è un elemento comunissimo nella pratica.
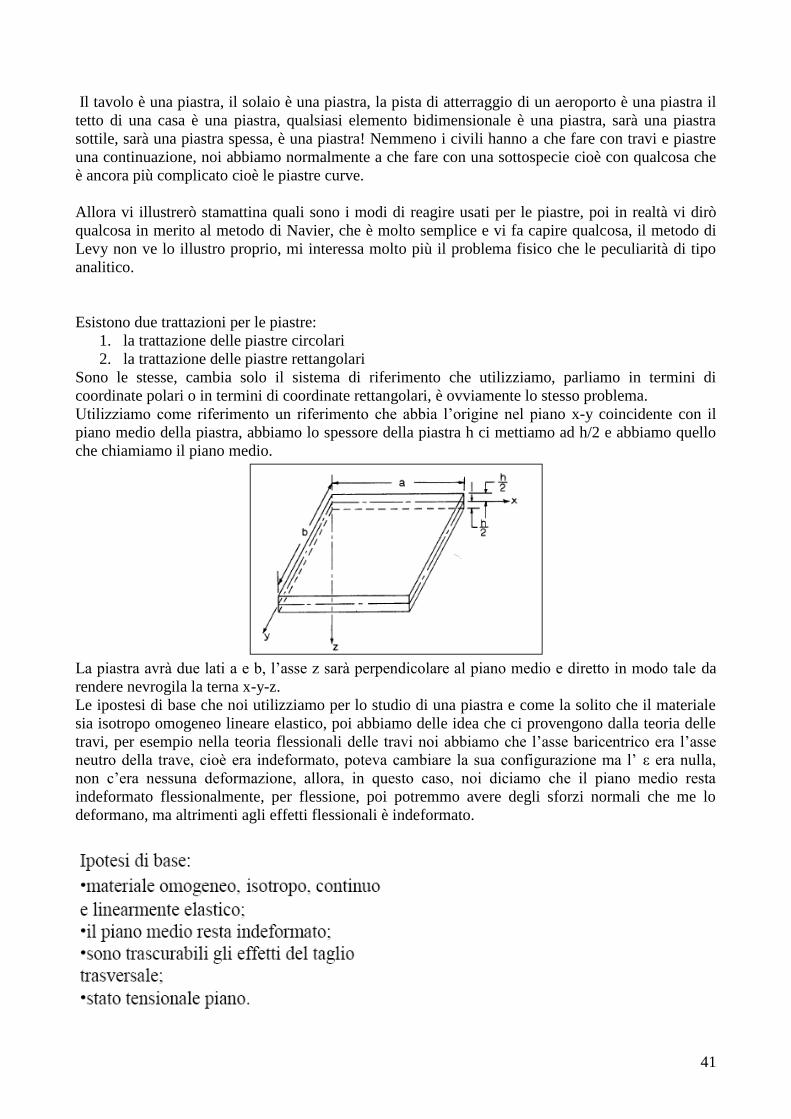
41
Il tavolo è una piastra, il solaio è una piastra, la pista di atterraggio di un aeroporto è una piastra il
tetto di una casa è una piastra, qualsiasi elemento bidimensionale è una piastra, sarà una piastra
sottile, sarà una piastra spessa, è una piastra! Nemmeno i civili hanno a che fare con travi e piastre
una continuazione, noi abbiamo normalmente a che fare con una sottospecie cioè con qualcosa che
è ancora più complicato cioè le piastre curve.
Allora vi illustrerò stamattina quali sono i modi di reagire usati per le piastre, poi in realtà vi dirò
qualcosa in merito al metodo di Navier, che è molto semplice e vi fa capire qualcosa, il metodo di
Levy non ve lo illustro proprio, mi interessa molto più il problema fisico che le peculiarità di tipo
analitico.
Esistono due trattazioni per le piastre:
1. la trattazione delle piastre circolari
2. la trattazione delle piastre rettangolari
Sono le stesse, cambia solo il sistema di riferimento che utilizziamo, parliamo in termini di
coordinate polari o in termini di coordinate rettangolari, è ovviamente lo stesso problema.
Utilizziamo come riferimento un riferimento che abbia l’origine nel piano x-y coincidente con il
piano medio della piastra, abbiamo lo spessore della piastra h ci mettiamo ad h/2 e abbiamo quello
che chiamiamo il piano medio.
La piastra avrà due lati a e b, l’asse z sarà perpendicolare al piano medio e diretto in modo tale da
rendere nevrogila la terna x-y-z.
Le ipostesi di base che noi utilizziamo per lo studio di una piastra e come la solito che il materiale
sia isotropo omogeneo lineare elastico, poi abbiamo delle idea che ci provengono dalla teoria delle
travi, per esempio nella teoria flessionali delle travi noi abbiamo che l’asse baricentrico era l’asse
neutro della trave, cioè era indeformato, poteva cambiare la sua configurazione ma l’ ε era nulla,
non c’era nessuna deformazione, allora, in questo caso, noi diciamo che il piano medio resta
indeformato flessionalmente, per flessione, poi potremmo avere degli sforzi normali che me lo
deformano, ma altrimenti agli effetti flessionali è indeformato.
42
Nella trave di Bernoulli, le sezioni rette dopo la deformazione continuavano ad essere normali
all’asse neutro, solo con la trave di Timoschenko che abbiamo la presenza del taglio. In questo caso
vale Bernoulli, diciamo che sono nulli, sono trascurabili gli effetti del taglio trasversale, cioè
diciamo che il taglio trasversale ci può essere però il suo effetto è praticamente trascurabile.
Nella trave le tensioni erano tutte nella sezione o perpendicolari alla sezione, ma
perpendicolarmente al piano neutro non avevamo tensioni, qua diciamo la stessa cosa, ovviamente,
diciamo perpendicolarmente al piano medio non abbiamo tensioni e quindi lo stato tensionale è
piano, questo ci induce a ritenere che lo spessore più è piccolo e meglio è, questo ci porta verso la
teoria delle piastre sottili.
In realtà c’è un’altra considerazione che noi facciamo, cioè riteniamo che lungo lo spessore della
piastra non ci siano variazioni nello spostamento normale, nello spostamento lungo z, in modo tale
da dire che non ci sono assottigliamenti, né variazioni di spessore perché lo spessore è sempre lo
stesso. Questo fa si, è molto importante, ci consente agli effetti dell’abbassamento di calcolare
soltanto quello che avviene sul paino neutro, perché tutto quello che avviene al di fuori del piano
neutro, per quello che riguarda lo spostamento lungo l’asse z è insignificante.
Questa relazione vale soltanto per quello che riguarda lo spostamento lungo z, non possiamo
trascurare invece l’intensità dello spostamento per quello che riguarda le altre due componenti dello
spostamento, la u e la v.
Infatti se abbiamo un punto che si trova a distanza z dal piano medio che è deformato, questo piano
medio cosa fa? Si abbassa e si deforma, e quindi finché si abbassa soltanto è ancora diretto
verticalmente, poi se il piano z si deforma, poiché gli effetti del taglio trasversali sono trascurabili,
quindi le sezioni rette continuano ad essere perpendicolari alle deformazioni, si ha anche una
rotazione.
Allora supponiamo che la rotazione sia di φ nel piano x-z e sia α nel piano y-z, noi abbiamo la
doppia deformazione, procedendo per sezioni, nel piano x-z e nel piano y-z, in direzione
longitudinale e in direzione trasversale.
È facile vedere, io avrò uno spostamento trasversale che sarà
e uno spostamento longitudinale pari a
Come spostamenti paralleli alla superficie media.

43
Se poi lungo la superficie media, nella superficie media agiscono dei carichi da sforzo normale o da
altro che mi producono uno spostamento omogeneo per tutto il piano u0 e v0 ecco che le componenti
di spostamento saranno:
[u0] da sforzo normale [– z senφ] da sforzo flettente, taglio, tutte le caratteristiche varie che non
giacciono nel piano medio e lo stesso nell’altra direzione.
Quindi possiamo definire tutte quante le tre componenti di spostamento
Di solito queste relazioni sono relazioni che non utilizziamo, perché in realtà esprimiamo un legame
con la w, cioè esprimiamo la φ e la α come una funzione di w.
Infatti è facile vedere che
E
Per cui la forma abituale con la quale studiamo le componenti di spostamento è questa:
, componenti di deformazione membranali
, componente di deformazione flessionale
00:17:30
Vediamo che noi prevalentemente non saremo assolutamente interessati a u0 e v0, la presenza di
sforzi nel paino medio mi determina uno sforzo normale, mi determina un allungamento uniforme
in una direzione o nell’altra direzione, quello che mi interessa sono gli effetti flessionali. Vediamo
che tutti gli effetti flessionali sono esprimibili in termini della sola w, dell’unica componente di
spostamento perpendicolare, in direzione perpendicolare alla iniziale configurazione del piano
medio. Infatti una volta note le componenti di spostamento posso, evidentemente, ricavarmi le
deformazioni.
Allora

44
x
wz
xu
xu
xx 0 e chiaro che 0
z
x perché siamo in un riferimento cartesiano
ortogonale
e quindi
Allo stesso modo per la deformazione lungo y
Per la deformazione lungo z, io me la devo calcolare tenendo conto che ci troviamo in uno stato
piano di tensione, quindi
Ovviamente le stesse ε me le potrei calcolare in maniera geometrica, ricorrendo alla solita
definizione del raggio di curvatura e quindi ecco la dimostrazione che utilizzando la definizione di
Ed ecco che la
Ovviamente è una fatica inutile perché non ci interessa.
Lo stato è tensionale piano per cui avremo le seguenti relazioni tra le componenti di deformazione e
le componenti di tensione

45
Invertendo queste relazioni, ed esprimendo le componenti di deformazione in funzione della w, e
delle derivate di w, ottengo queste che sono le classiche rappresentazioni delle tensioni nel caso di
una piastra.
Come vedete esprimo le componenti di tensione attraverso le derivate degli spostamenti.
Il motivo, come vedremo tra poco, è che operando in questa maniera le equazioni di equilibro
diventano una equazione in w, e quindi lo studio dell’equilibrio della piastra si riduce allo studio di
una equazione differenziale del quarto ordine in w (w componente di deformazione).
Questo è il motivo per cui esprimo le tensioni in funzione degli spostamenti, cosa che di solito non
facciamo, qua ne abbiamo una utilità particolare.
Adesso dobbiamo introdurre quella che sostanzialmente è una notazione, è una notazione dovuta a
Timoshenko, che ha fatto tante cose belle, qualcuna la sgarrata, secondo me questa è una di quelle
che ha sgarrato alla grande, però grazie alla sua personalità e quella che si utilizza sempre.
Ha sgarrato perchè ha creato una tale confusione di notazione che è contraria a quello che
spontaneamente saremmo portati ad utilizzare.
In realtà sappiamo benissimo che le componenti di sforzo interno, sforzo normale, taglio, momenti
ed eccetera, si ottengono semplicemente integrando il diagramma delle tensioni corrispondenti, in
modo per esempio, da ottenere risultante il momento risultante delle forze elementari dovute alle
componenti elementari.
Allora, la prima cosa che Timoschenko ha detto è stata molto giusta, normalmente noi abbiamo a
che fare con piastre di spessore costante, ho una piastra e in tutti i punti della piastra lo spessore è
costante, allora se abbiamo devo fare un integrale, per esempio di una forza elementare σdA, lo
dovrò fare esteso a una superficie, e siccome se io prendo la piastra tutte queste tensioni agiscono
nella sezione retta della piastra, cioè una sezione rettangolare che ha per altezza lo spessore che è
uniforme e per larghezza ha la larghezza del lato della piastra. È inutile quindi che io mi porto
dietro le tensioni che poi devo integrare, io mi faccio direttamente l’integrazione delle tensioni
rispetto allo spessore, perché quella parte dell’integrazione sarà sempre la stessa, poi ci sarà una
variazione di questo sforzo lungo il lato, però metà problema già me lo sono risolto.
Allora per esempio nel momento in cui, io ho la σx, la σx agirà su una faccia che sarà h per Δy, mi
sembra che l’abbiamo chiamata B il lato lungo y.
Allora lo sforzo normale non è altro che la risultante delle forze elementare σdA, dA sarebbe h per
dx, e quindi praticamente H tutta quanta sarebbe dz per dy. Allora mi incomincio a fare l’integrale
di σ in dz e pi rimane ancora l’integrazione rispetto alla y.
46
Cosa vuol dire questo? io sto dicendo che lo sforzo normale che è applicato su quella faccia è pari
Nx in una striscietta unitaria.
Allora Nx non lo posso chiamare sforzo normale, perché? Facciamo l’analisi dimensionale,
[N/mm^2 per mm] non hanno dimensioni di Newton ma di N/mm. In questa maniera mi lascio
aperta la possibilità di avere una Nx che varia lungo y.
Allora queste quantità, che si ottengono utilizzando le risultanti e i momenti risultanti delle forze
elementari lungo solo lo spessore, non posso chiamarle caratteristiche degli sforzi interni e le
chiamo risultanti delle tensioni.
Allora questo dovuto a Timoschenko ha permeato la cultura planetaria, per cui quando si parla di
piastre, ben difficilmente sentiremo parlare di tensioni ma normalmente sentiremo parlare di
risultante delle tensioni.
Chi mi ha insegnato la costruzione di macchine era un grande nemico di questo, per cui ci insegno
gusci e piastre tutto in termini di tensione, appena uscimmo dalle aule non capivamo niente perché
tutto il resto del mondo parlava un’altra lingua, parlava in termini di risultante delle tensioni.
Allora questa idea di Timoschenko è stata sicuramente buona, ma questa è la prima parte dell’idea,
dove se scese è stato sulla seconda parte dell’idea. Perché sulla seconda parte dell’idea lui ha detto
come li rappresento come notazione tipica le grandezze che mi sono calcolato? Le rappresento con
lo stesso pedice delle tensioni dalle quali sono partito e qui ha fatto uno di quegli imbrogli forti,
brogli nel senso di confusione.
Perché se io considero per esempio Nx, allora questa σx che è per perpendicolare alla sezione retta
y-z ed è diretta lungo x, Nx è diretta lungo x. Ok!
Andiamo sui momenti. Perché sulle forze non lo vediamo.
Mx non è altro che il momento della σx rispetto al piano medio e questo momento è un vettore che
è diretto lungo y però io lo chiamo Mx, facendo riferimento non alla sua direzione ma alla
componente di sollecitazione che lo ha determinato. Questo finchè uno non si abitua è un incubo!
Sostanzialmente abbiamo
Che sono entrambi flettenti, ed abbiamo
47
Che è un momento torcente, nell’una e nell’altra direzione; in questo caso i due momenti sono
uguali, perché la tauxy e la tauyx sono uguali. Quando ci troveremo a parlare delle piastre curve,
poiché le sezioni sono diverse anche se tauxy e tauyx sono uguali, Mxy e Myx non sono uguali
perché sono riferiti a sezioni di tipo diverso. 00:30:40
Evidentemente la prima cosa che dobbiamo fare è scrivere le condizioni di equilibrio di questa
piastra, per cui prendiamo una rappresentazione del piano neutro
E andiamo a rappresentare non le tensioni, ma andiamo a rappresentare direttamente le risultanti
delle tensioni, in modo tale da non pensare più all’influenza dello spessore.
Allora avremo due tagli che da una parte saranno Qxz e Qyz e dall’altra parte saranno per
l’equilibro
Perché devo considerare l’incremento che debbo avere lungo il lato
00:31:30
E così sia per i tagli che per i momenti
Ovviamente anche per gli sforzi normali, però in generale gli sforzi normali in questi casi noi non li
prendiamo mai in considerazione, li trattiamo separatamente, perché non danno un contributo
notevole allo stato tensionale, non hanno nulla di particolare da dire: Nx mi dà una σx che è un εx
moltiplicato per E modulo di Yang, o è trave o è piastra, non è cambiato assolutamente niente.
Allora siccome non si hanno termini di accoppiamento tra sforzi normali e momenti mentre li
abbiamo tra tagli e momenti, allora noi tutto quello che è sforzo normale chiamiamo sforzi nel
piano medio, poi vedremo che a un certo punto noi li chiameremo sforzi membranali, cioè nel piano
del momento, e consideriamo soltanto la strizione. Lo stesso avviene quando abbiamo a che fare
con gli elementi finiti, negli elementi finiti esistono gli schell e i plane, la differenza tra i due che
uno resiste a sforzi nel piano e il plane resiste agli sforzi taglianti. Ricordo quando uscì il Nastran,
aveva gli elementi membranali, gli elementi flessionali e poi aveva la somma dei due quindi
reagivano sia nel piano medio sia a flessione e a taglio.

48
Dopodichè io dovrò evidentemente scrivere le equazioni di equilibrio di questa piastra elementare
per ottenere le equazioni indefinite dell’equilibrio della piastra, cioè le equazioni di equilibrio che
devono essere valide in qualunque punto della piastra con riferimento ad una superficie elementare
ad un volume elementare.
Allora potrò scrivere l’equazione di equilibrio lungo z,
Le equazioni di equilibrio lungo x e lungo y è inutile scriverle, significa scrivere Nx=-Nx e Ny=-Ny
Quindi dovrò scrivere le equazioni di equilibrio alla rotazione, una la posso scrivere intorno all’asse
baricentrico parallelo ad x
L’altra intorno all’asse baricentrico parallelo all’asse y
È molto semplice scrivere queste equazioni, ovviamente l’equazione di equilibrio lungo z mi
compariranno anche i carichi esterni che io ritengo essere normali alla superficie, quindi se mi
danno un carico per unità di superficie pari a p, sull’elementino agirà una pdxdy
Alla fine io ottengo tre equazioni di equilibrio, queste sono le tre equazioni indefinite dell’equilibrio
relative ad una piastra di spessore h caricata normalmente.
Ho un equazione di equilibrio alla traslazione lungo z, che come vedete, comprende soltanto i tagli
e il carico esterno e poi due equazioni di equilibrio alla rotazione nelle quali compaiono un
momento flettente, un momento torcente ed un taglio, sia l’una che l’altra.
Noi mi interessa portarmele appresso tutte e tre, preferisco ridurla ad una sola. Mi ricavo una
componete Q, da
E analogamente farò per questa
E me le vado ad inserire nella prima equazione di equilibrio alla traslazione lungo z
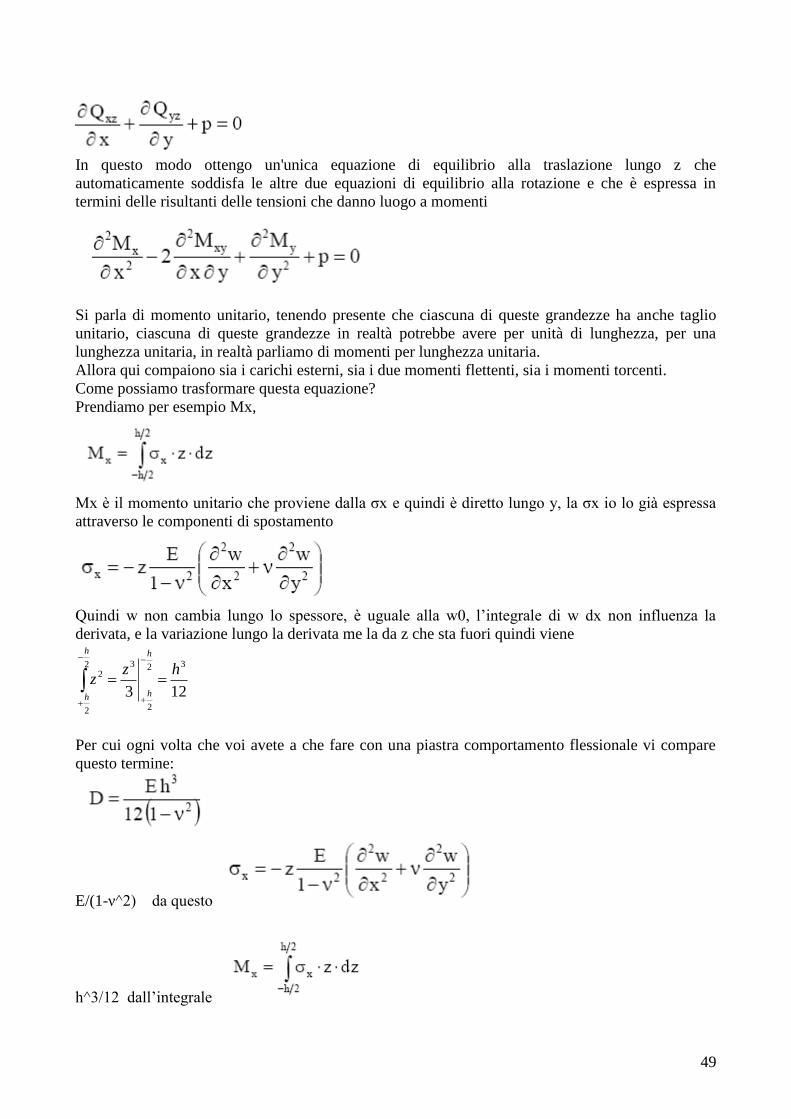
49
In questo modo ottengo un'unica equazione di equilibrio alla traslazione lungo z che
automaticamente soddisfa le altre due equazioni di equilibrio alla rotazione e che è espressa in
termini delle risultanti delle tensioni che danno luogo a momenti
Si parla di momento unitario, tenendo presente che ciascuna di queste grandezze ha anche taglio
unitario, ciascuna di queste grandezze in realtà potrebbe avere per unità di lunghezza, per una
lunghezza unitaria, in realtà parliamo di momenti per lunghezza unitaria.
Allora qui compaiono sia i carichi esterni, sia i due momenti flettenti, sia i momenti torcenti.
Come possiamo trasformare questa equazione?
Prendiamo per esempio Mx,
Mx è il momento unitario che proviene dalla σx e quindi è diretto lungo y, la σx io lo già espressa
attraverso le componenti di spostamento
Quindi w non cambia lungo lo spessore, è uguale alla w0, l’integrale di w dx non influenza la
derivata, e la variazione lungo la derivata me la da z che sta fuori quindi viene
123
32
2
32
2
2 hzz
h
h
h
h
Per cui ogni volta che voi avete a che fare con una piastra comportamento flessionale vi compare
questo termine:
E/(1-ν^2) da questo
h^3/12 dall’integrale

50
questo è un gruppo che quando avete a che fare con le piastre vi trovate sempre davanti.
Contiene già lo spessore, l’effetto dello spessore già sta lì.
Praticamente come altrove vi appuntate su un pezzo di carta il modulo di Young, quando abbiamo a
che fare con le piastre ci appuntate su un pezzo di carta il valore di D.
Allora l’integrazione si fa sentire solo fuori, con la comparsa di D
Ecco allora che Mx risulta pari a D per il contenuto della parentesi tonda.
My che è diretta lungo x sarà
Mxy conterrà la derivata mista
E poi posso ancora considerare i tagli, i tagli che non contengono la z sono pari a zero
Quindi a questo punto cosa posso fare, se io sono capace di esprimere i momenti rispetto alle w, io
introduco i valori trovati nella
Ed ottengo una equazione in w
E diventa l’equazione risolvente dell’equilibrio delle piastre sottoposte a flessione
Purtroppo non è nemmeno bi-armonica perché c’è un termine noto.

51
In alcuni casi si tenta di semplificare la soluzione di questo problema, ponendo il legame che esiste
tra la somma dei momenti flettenti e il laplaciano secondo di w
E allora si spezza il problema in due problemi
Si calcola un equazione di secondo ordine che lega la somma dei momenti flettenti al carico esterno
e poi si integra la soluzione per ottenere w, questo non lo faremo mai, ci riferiremo direttamente alla
soluzione diretta.
Questa equazione differenziale deve essere soddisfatta sempre quando abbiamo a che fare con una
piastra soggetta a flessione, in ogni punto. Rappresenta, quindi, l’equazione di equilibrio che noi
dobbiamo integrare, alla presenza di determinati carichi esterni, per ottenere la soluzione in termini
di spostamento.
Noi otteniamo, direttamente, come soluzione la deformata della nostra struttura.
Però, ovviamente, siamo già in condizione di operare questa integrazione o dobbiamo fare qualche
altra cosa?? Per risolvere un equazione differenziale devo prima dare le condizioni al contorno, se
non so esprimere le condizioni al contorno di una piastra io non risolverò mai nulla.
Le condizioni al contorno dipenderanno da come è realizzato il vincolo, dovremmo fare diverse
ipotesi, io farò tre ipotesi che sono i tre casi più comuni:
1 Bordo appoggiato
2 Bordo incastrato
3 Bordo libero
Per quanto riguarda il bordo appoggiato, se io ho una trave quali sono le caratteristiche del mio
appoggio?
Lo spostamento è nullo e il momento è nullo.
Quindi se il bordo è appoggiato x=a bordo parallelo ad y io dirò che w per x uguale ad a e per y
qualsiasi deve essere uguale a zero e che Mx (quella legata alla σx) per qualsiasi valore di y per
questo valore di x deve essere uguale a zero.
Ma Mx è uguale a
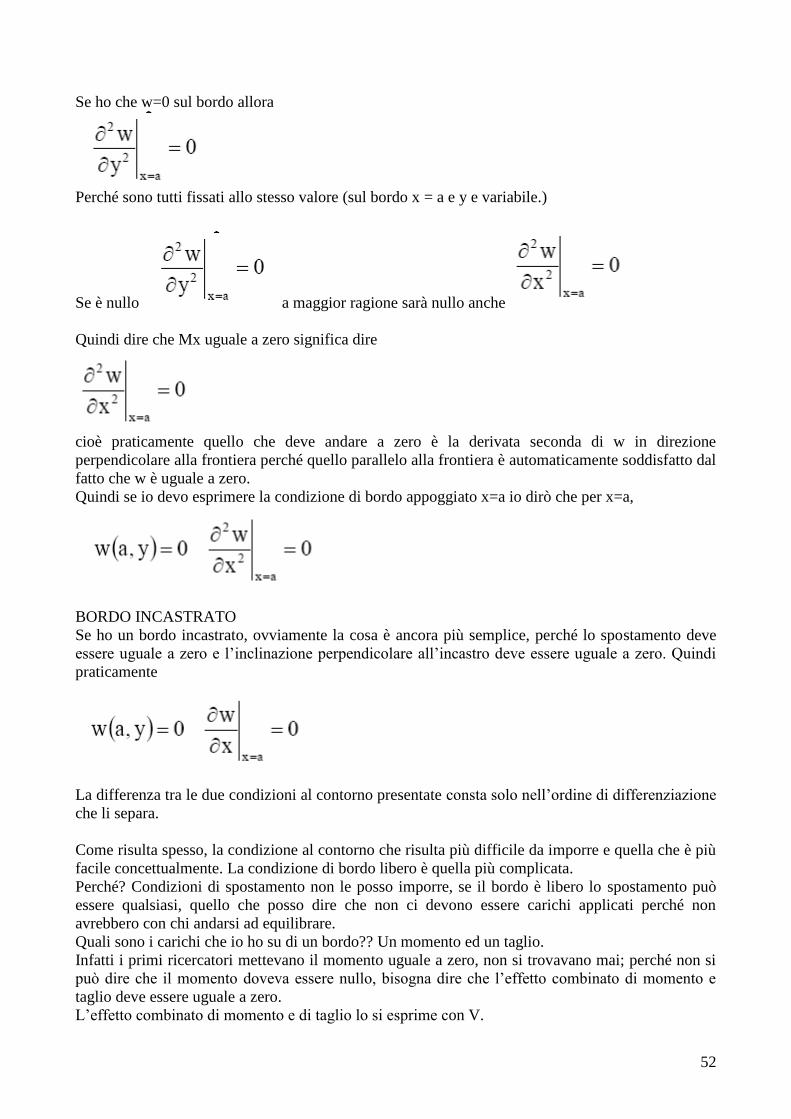
52
Se ho che w=0 sul bordo allora
Perché sono tutti fissati allo stesso valore (sul bordo x = a e y e variabile.)
Se è nullo a maggior ragione sarà nullo anche
Quindi dire che Mx uguale a zero significa dire
cioè praticamente quello che deve andare a zero è la derivata seconda di w in direzione
perpendicolare alla frontiera perché quello parallelo alla frontiera è automaticamente soddisfatto dal
fatto che w è uguale a zero.
Quindi se io devo esprimere la condizione di bordo appoggiato x=a io dirò che per x=a,
BORDO INCASTRATO
Se ho un bordo incastrato, ovviamente la cosa è ancora più semplice, perché lo spostamento deve
essere uguale a zero e l’inclinazione perpendicolare all’incastro deve essere uguale a zero. Quindi
praticamente
La differenza tra le due condizioni al contorno presentate consta solo nell’ordine di differenziazione
che li separa.
Come risulta spesso, la condizione al contorno che risulta più difficile da imporre e quella che è più
facile concettualmente. La condizione di bordo libero è quella più complicata.
Perché? Condizioni di spostamento non le posso imporre, se il bordo è libero lo spostamento può
essere qualsiasi, quello che posso dire che non ci devono essere carichi applicati perché non
avrebbero con chi andarsi ad equilibrare.
Quali sono i carichi che io ho su di un bordo?? Un momento ed un taglio.
Infatti i primi ricercatori mettevano il momento uguale a zero, non si trovavano mai; perché non si
può dire che il momento doveva essere nullo, bisogna dire che l’effetto combinato di momento e
taglio deve essere uguale a zero.
L’effetto combinato di momento e di taglio lo si esprime con V.
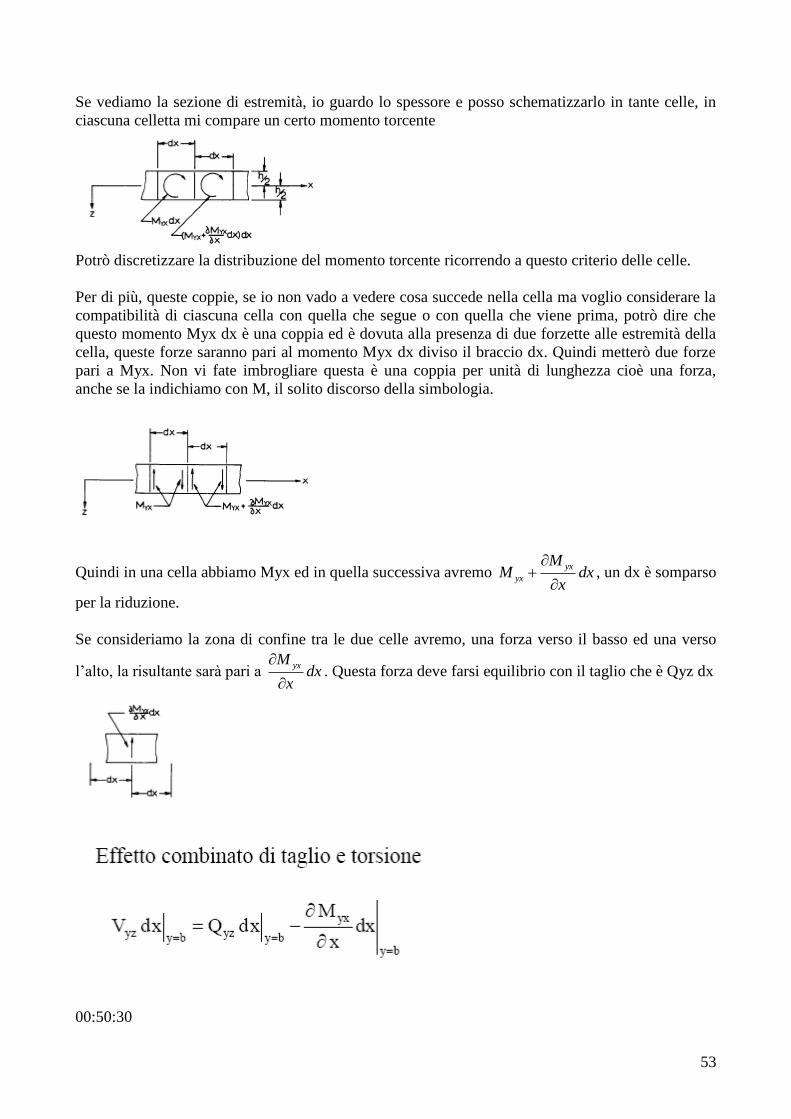
53
Se vediamo la sezione di estremità, io guardo lo spessore e posso schematizzarlo in tante celle, in
ciascuna celletta mi compare un certo momento torcente
Potrò discretizzare la distribuzione del momento torcente ricorrendo a questo criterio delle celle.
Per di più, queste coppie, se io non vado a vedere cosa succede nella cella ma voglio considerare la
compatibilità di ciascuna cella con quella che segue o con quella che viene prima, potrò dire che
questo momento Myx dx è una coppia ed è dovuta alla presenza di due forzette alle estremità della
cella, queste forze saranno pari al momento Myx dx diviso il braccio dx. Quindi metterò due forze
pari a Myx. Non vi fate imbrogliare questa è una coppia per unità di lunghezza cioè una forza,
anche se la indichiamo con M, il solito discorso della simbologia.
Quindi in una cella abbiamo Myx ed in quella successiva avremo dxx
MM
yx
yx
, un dx è somparso
per la riduzione.
Se consideriamo la zona di confine tra le due celle avremo, una forza verso il basso ed una verso
l’alto, la risultante sarà pari a dxx
M yx
. Questa forza deve farsi equilibrio con il taglio che è Qyz dx
00:50:30

54
Allora se io considero il momento torcente Myx che già conteneva la derivata seconda mista lo
vado a derivare rispetto ad x mi viene una derivata terza mista, poi ci vado a mettere l’espressione
di Qyz ed ecco qua cosa esce:
Allora dire che si annulla l’effetto combinato del momento torcente e del taglio significa che deve
essere soddisfatta questa equazioni differenziale
Dire che perpendicolarmente deve essere nullo il momento flettente, perché non ci sono carichi
applicati, significa che deve essere rispettata quest’altra condizione
Vediamo che esprimere una condizione di bordo libero è tutto tranne che semplice.
Sono le equivalenti di
Che abbiamo visto prima, soltanto che qui compaiono derivate terze, compaiono derivate miste,
quindi praticamente è di solito seccante realizzarle.
Allora a questo punto io vi faccio vedere semplicemente la soluzione di Navier, sulla soluzione di
Levy non ci stiamo molto perché, sostanzialmente, ci rimane poco tempo alla fine del corso.
Allora Navier ha lasciato la soluzione per serie di un problema molto particolare, cioè di una piastra
rettangolare di lati a e b, poggiata su tutti i bordi, un solaio praticamente, e caricata da un carico
uniforme.
Allora ovviamente abbiamo
come equazione di equilibrio e abbiamo le otto condizioni al contorno che sono queste che voi
vedete

55
E corrispondono alla condizione di bordo appoggiato che abbiamo visto.
Allora, Navier partì da una distribuzione del carico uniforme e poi ampliò le sue analisi ad un carico
qualsiasi purché fosse esprimibile in una serie doppia di Fourier e quindi in altri termini se ho un
carico qualsiasi lungo x potrò esprimerlo in serie di Fourier, siccome il problema è bidimensionale,
è chiaro che viene fuori una serie doppia, vuol dire che ho infinite armoniche lungo x e infinite
armoniche lungo y, in corrispondenza di una qualsiasi coppia di numeri di armoniche n ed m io avrò
un coefficiente che mi rappresenta l’ampiezza di questa armonica superficiale, non più lungo una
sola dimensione, che indico con n e m.
Qual è l’unica condizione che questo carico deve rispondere? L’unica condizione che deve
rispondere è che per x=0 ad a e per y=0 a b deve andarsene a zero, perché all’esterno non dobbiamo
avere una prosecuzione di questo carico.
00:54:50
Questa è l’espressione di una serie doppia che soddisfa questa condizione
E dallo studio delle serie doppie, in totale analogia con quelle che sono le serie semplici di Fourier,
il valore della generica ampiezza dell’armonica si può ottenere una volta nota complessivamente
l’andamento della funzione p(x,y)
Allora Navier prese questo valore di p e lo mise nell’equazione di equilibrio delle piastre e disse:
scusate, io ho al primo membro tutte le derivate di una funzione al secondo membro ho una
funzione p
che è espressa in funzione di una serie doppia di Fourier con l’ipotesi che vada a zero sui bordi, w
deve andare a zero sui bordi.
È possibile ritenere che la w sia esprimibile attraverso la stessa serie di Fourier doppia ovviamente
con coefficiente diversi? Allora lui pose w(x,y) in questa forma

56
Avendo derivate quarte e derivate miste seconde avremo sempre seno-seno in ciascuno dei termini,
allora vuol dire che io avrò seno seno sia al primo che al secondo membro e quindi potrò utilizzare
il principio di identità.
Allora se io faccio le varie sostituzioni ho
Allora io posso ricavarmi Wmn come:
Naturalmente Amn era pari a quell’integrale doppio in funzione del diagramma spaziale della p,
allora io volendo mi posso ricavare Amn direttamente dalla distribuzione delle p.
Tutto questo è molto bello, ma andate a calcolare abbiamo delle serie doppie; il problema è che se
una serie doppia converge molto rapidamente, voi i problemi non li avete, subito terminate i vari
calcoli. Ma se avete una serie doppia che converge lentamente, sono cavoli; una volta capitò che
volevo utilizzare un metodo del genere per risolvere le iterazioni tra un disco ed una corona che
stava attorno, per effetto della forza centrifuga volevo capire qual’erano l’andamento delle tensioni
lì attorno. Ricordo che me la portai al mare, presi una casa al mare, d’estate in riva al mare con mia
moglie e i bambini ed io da lontano che lavoravo a mano per trovare una soluzione, non convergeva
assolutamente ho perso tutto il mese di agosto, poi lo feci con un calcolatore, anni 70’, e vidi che se
non prendevo almeno 70 – 80 armoniche lungo x e lo stesso lungo y non potevo mai avere una
soluzione degna di questo nome.
Il problema è un problema di convergenza! Il problema di convergenza mi dice quante armoniche
mi devo portare appresso, è inutile dire che se aumentiamo di uno l’armonica, aumenta non solo il
tempo, ma la possibilità che possiamo fare degli errori, questo è uno dei motivi per i quali il metodo
degli elementi finiti è molto più utilizzato! la realtà e che i conti non li facciamo noi.
Allora questa che vediamo è la deformata della piastra di Navier

57
È una piastra appoggiata su tutte e quattro i bordi e caricata da un carico uniforme, avete in questa
maniera i diagrammi che vi danno i momenti nelle diverse sezioni, io ho fatto questi diagrammi
costruendoli per sezioni
Abbiamo l’andamento del momento che parte da zero arriva ad un massimo e poi ritorna a zero
un’altra volta che è il momento lungo y; dall’altra parte va a zero e parte da zero, l’andamento del
momento, ma per la maggior parte della lunghezza rimane costante.
Quindi valori tutti nulli lungo il bordo ovviamente e valori massimi al centro ovviamente.
Naturalmente l’idea di Navier non è cosi limitata perché ci consente anche di analizzare quello che
accade per un carico distribuito su di una parte della piastra, la soluzione ovviamente è la stessa. Il
problema è che dobbiamo, semplicemente, quando andiamo a scrivere Amn che era l’integrale
esteso alla piastra di p(x,y) per in seno eccetera, stavolta l’integrale non va esteso alla piastra ma va
esteso soltanto alla zona nella quale è applicato il carico.
Quindi se per esempio il carico è uniforme nella zona di ampiezza c per d
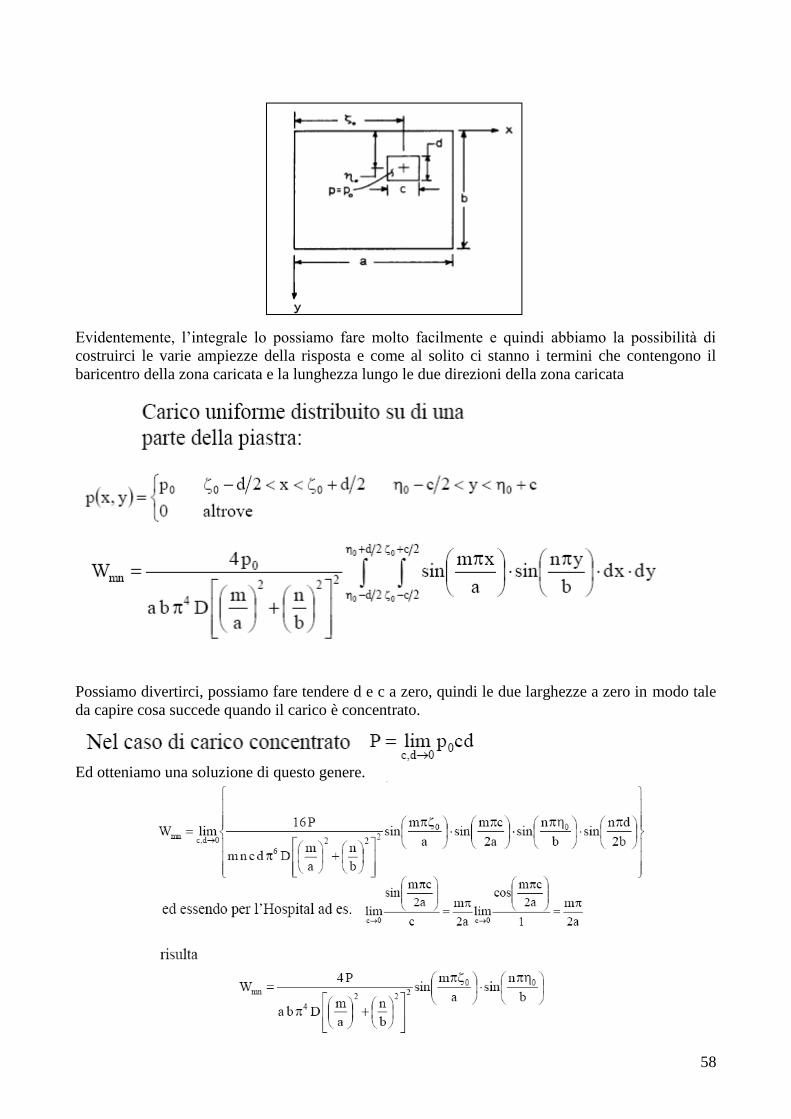
58
Evidentemente, l’integrale lo possiamo fare molto facilmente e quindi abbiamo la possibilità di
costruirci le varie ampiezze della risposta e come al solito ci stanno i termini che contengono il
baricentro della zona caricata e la lunghezza lungo le due direzioni della zona caricata
Possiamo divertirci, possiamo fare tendere d e c a zero, quindi le due larghezze a zero in modo tale
da capire cosa succede quando il carico è concentrato.
Ed otteniamo una soluzione di questo genere.

59
Questo è quello che ci consente l’analisi di Navier.
L’analisi di Levy è un analisi sicuramente più completa, che vi invito a leggere, a parte la
pesantezza matematica sulla quale potete sorvolare, ma praticamente mostra come è possibile
esprimere delle condizioni al contorno completamente diverse l’una dall’altra.
Quindi per esempio potete risolvere problemi con le condizioni al contorno più varie, incastrata da
due parti, libera dall’altra eccetera.
Cosa ha fatto Levy? Non ha fatto altro che prendere, è stato un secolo dopo Navier, l’equazione
Ha detto: questa è un’equazione differenziale a derivate parziali del 4 ordine avrà un omogenea
associata con un suo integrale generale e poi avrà un integrale particolare dell’equazione completa
Capiamo quale debba essere la soluzione dell’omogenea associata, soluzione dell’equazione bi-
armonica quindi già nota.
Andiamo a calcolarci quelle che devono essere le condizioni per la soluzione dell’integrale
particolare ed otteniamo una equazione simile a quella che abbiamo ottenuta nel metodo precedente,
della forma:
E le andiamo a risolvere.
L’idea che si utilizza quando si impiega il metodo di Navier assomiglia tanto al Compouding.
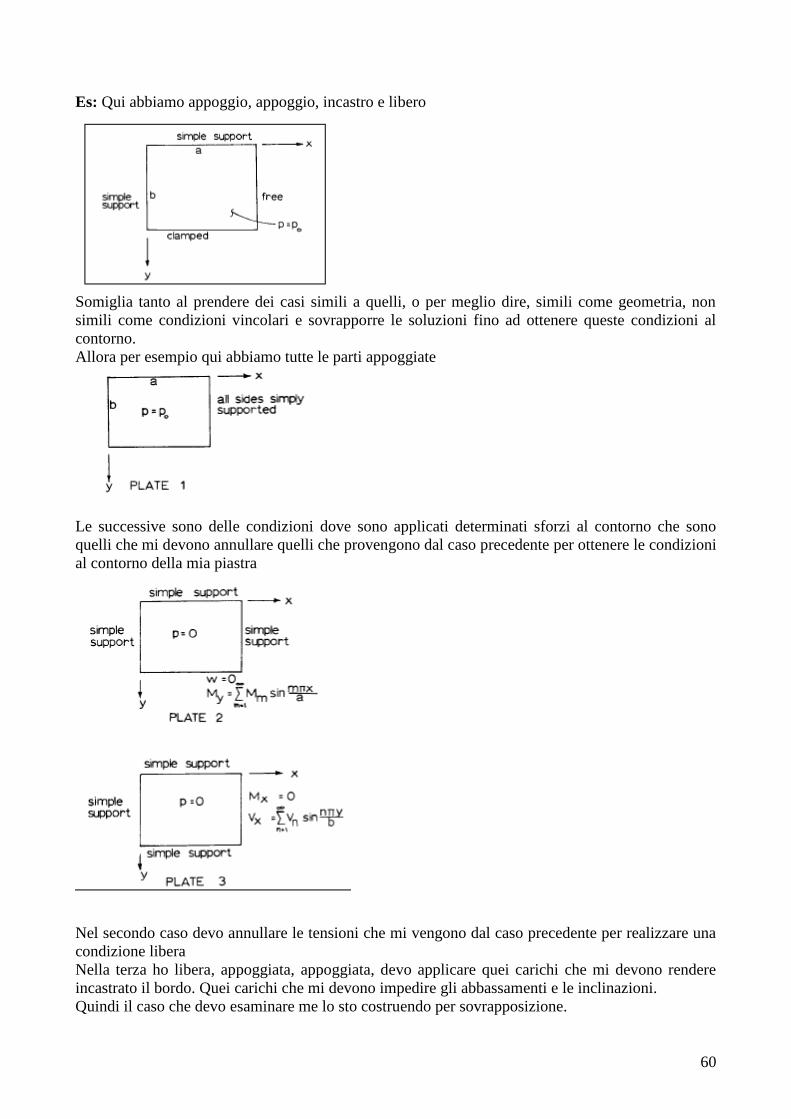
60
Es: Qui abbiamo appoggio, appoggio, incastro e libero
Somiglia tanto al prendere dei casi simili a quelli, o per meglio dire, simili come geometria, non
simili come condizioni vincolari e sovrapporre le soluzioni fino ad ottenere queste condizioni al
contorno.
Allora per esempio qui abbiamo tutte le parti appoggiate
Le successive sono delle condizioni dove sono applicati determinati sforzi al contorno che sono
quelli che mi devono annullare quelli che provengono dal caso precedente per ottenere le condizioni
al contorno della mia piastra
Nel secondo caso devo annullare le tensioni che mi vengono dal caso precedente per realizzare una
condizione libera
Nella terza ho libera, appoggiata, appoggiata, devo applicare quei carichi che mi devono rendere
incastrato il bordo. Quei carichi che mi devono impedire gli abbassamenti e le inclinazioni.
Quindi il caso che devo esaminare me lo sto costruendo per sovrapposizione.

61
Abbiamo visto che gli sforzi normali noi li trascuriamo, e lavoriamo sempre sui momenti flettenti e
i momenti torcenti, in realtà se w=0, teoricamente, la condizione di equilibrio nel piano medio è
questa:
Io sto prendendo in considerazione le εx e le εy, le du/dx e le dv/dy, cioè sarebbero
Se io non voglio far comparire l’accoppiamento con il comportamento flessionale devo dire che mi
trovo in un caso in cui w=0 o comunque è trascurabile.
Se è trascurabile, passando alle risultanti delle tensioni
Io ottengo due equazioni differenziali che contengono soltanto le risultanti da sforzo normale e le
risultanti da taglio che vanno a confrontarsi con i carichi, px e py che agiscono in direzione parallela
al piano, quindi non sono carichi normali sono carichi radenti la superficie superiore e per essa
quella media della piastra.
Se invece w non è trascurabile, allora sostanzialmente mi comparirà un accoppiamento con la w:
x
wz
xu
xu
xx 0
Utilizzando quest’accoppiamento si può far vedere che l’equazione di equilibrio flessionale della
piastra che noi abbiamo scritto come:
È uguale a:
Dove oltre il carico applicato ci sono anche gli sforzi agenti sul piano medio.
Questo è un fatto molto importante, in merito alla stabilità.

62
In realtà quello che è interessante da questo è che allora sulla deformazione flessionale di una
piastra gioca un ruolo importantissimo qualsiasi carico parallelo al piano medio.
Per esempio questo è il caso del carico uniformemente distribuito sulla piastra, soluzione di Navier,
nell’ipotesi in cui ci sia una Nx.
Allora vedete che una trazione nel piano medio, come è intuitivo, mi riduce gli abbassamenti
flessionali, quando si fa quel gioco con il lenzuolo con quel tipo che saltella noi stiamo facendo
proprio questo, applichiamo un carico di trazione sul bordo del lenzuolo e abbassiamo, in quel caso
si fa anche per cercare di molleggiare, però praticamente quello che importa è che l’abbassamento si
va riducendo. Quello che succede nella instabilità dei pannelli e che questa N è di compressione
allora w diventa più grande e tende ad andare ad infinito quando il denominatore della precedente
relazione va a zero e li si scatena l’instabilità della piastra sottoposta a flessione.
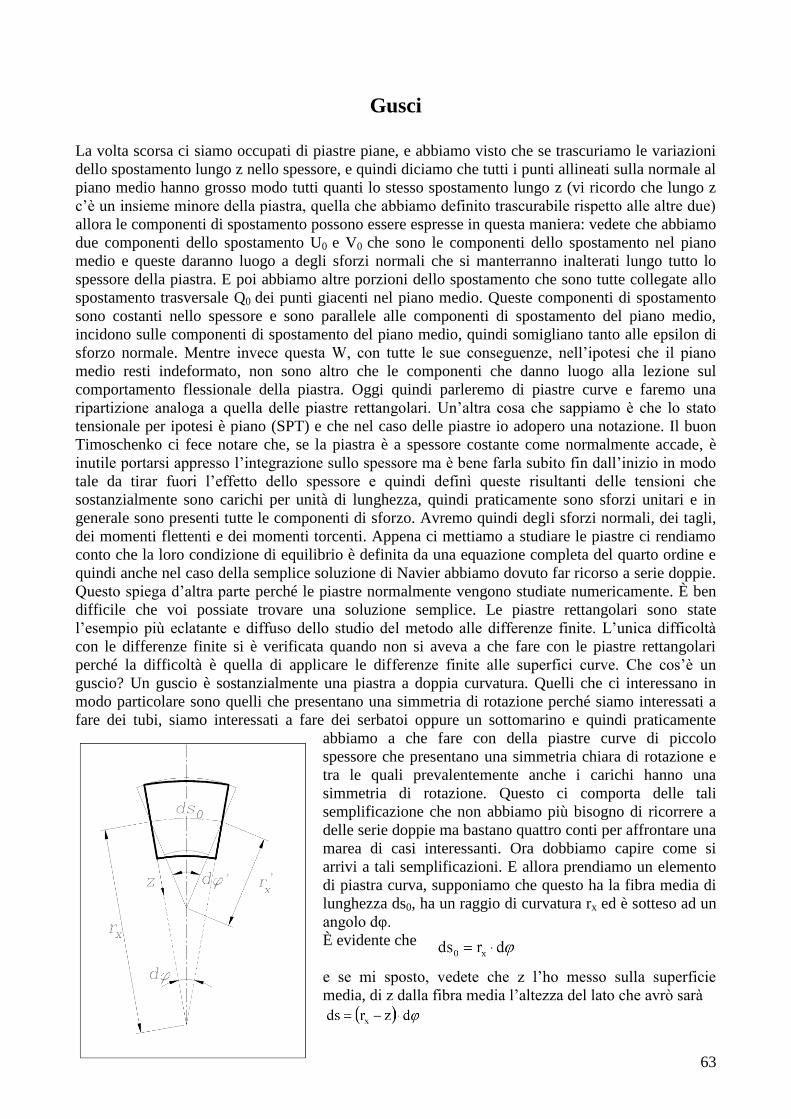
63
Gusci
La volta scorsa ci siamo occupati di piastre piane, e abbiamo visto che se trascuriamo le variazioni
dello spostamento lungo z nello spessore, e quindi diciamo che tutti i punti allineati sulla normale al
piano medio hanno grosso modo tutti quanti lo stesso spostamento lungo z (vi ricordo che lungo z
c’è un insieme minore della piastra, quella che abbiamo definito trascurabile rispetto alle altre due)
allora le componenti di spostamento possono essere espresse in questa maniera: vedete che abbiamo
due componenti dello spostamento U0 e V0 che sono le componenti dello spostamento nel piano
medio e queste daranno luogo a degli sforzi normali che si manterranno inalterati lungo tutto lo
spessore della piastra. E poi abbiamo altre porzioni dello spostamento che sono tutte collegate allo
spostamento trasversale Q0 dei punti giacenti nel piano medio. Queste componenti di spostamento
sono costanti nello spessore e sono parallele alle componenti di spostamento del piano medio,
incidono sulle componenti di spostamento del piano medio, quindi somigliano tanto alle epsilon di
sforzo normale. Mentre invece questa W, con tutte le sue conseguenze, nell’ipotesi che il piano
medio resti indeformato, non sono altro che le componenti che danno luogo alla lezione sul
comportamento flessionale della piastra. Oggi quindi parleremo di piastre curve e faremo una
ripartizione analoga a quella delle piastre rettangolari. Un’altra cosa che sappiamo è che lo stato
tensionale per ipotesi è piano (SPT) e che nel caso delle piastre io adopero una notazione. Il buon
Timoschenko ci fece notare che, se la piastra è a spessore costante come normalmente accade, è
inutile portarsi appresso l’integrazione sullo spessore ma è bene farla subito fin dall’inizio in modo
tale da tirar fuori l’effetto dello spessore e quindi definì queste risultanti delle tensioni che
sostanzialmente sono carichi per unità di lunghezza, quindi praticamente sono sforzi unitari e in
generale sono presenti tutte le componenti di sforzo. Avremo quindi degli sforzi normali, dei tagli,
dei momenti flettenti e dei momenti torcenti. Appena ci mettiamo a studiare le piastre ci rendiamo
conto che la loro condizione di equilibrio è definita da una equazione completa del quarto ordine e
quindi anche nel caso della semplice soluzione di Navier abbiamo dovuto far ricorso a serie doppie.
Questo spiega d’altra parte perché le piastre normalmente vengono studiate numericamente. È ben
difficile che voi possiate trovare una soluzione semplice. Le piastre rettangolari sono state
l’esempio più eclatante e diffuso dello studio del metodo alle differenze finite. L’unica difficoltà
con le differenze finite si è verificata quando non si aveva a che fare con le piastre rettangolari
perché la difficoltà è quella di applicare le differenze finite alle superfici curve. Che cos’è un
guscio? Un guscio è sostanzialmente una piastra a doppia curvatura. Quelli che ci interessano in
modo particolare sono quelli che presentano una simmetria di rotazione perché siamo interessati a
fare dei tubi, siamo interessati a fare dei serbatoi oppure un sottomarino e quindi praticamente
abbiamo a che fare con della piastre curve di piccolo
spessore che presentano una simmetria chiara di rotazione e
tra le quali prevalentemente anche i carichi hanno una
simmetria di rotazione. Questo ci comporta delle tali
semplificazione che non abbiamo più bisogno di ricorrere a
delle serie doppie ma bastano quattro conti per affrontare una
marea di casi interessanti. Ora dobbiamo capire come si
arrivi a tali semplificazioni. E allora prendiamo un elemento
di piastra curva, supponiamo che questo ha la fibra media di
lunghezza ds0, ha un raggio di curvatura rx ed è sotteso ad un
angolo dφ.
È evidente che
e se mi sposto, vedete che z l’ho messo sulla superficie
media, di z dalla fibra media l’altezza del lato che avrò sarà

64
Questo di solito lo scriviamo portando fuori rx:
Da qui già si capisce dove ci stiamo avviando perché se z è piccolo rispetto a x, rx non lo tocchiamo
e quindi si vede che tutte le semplificazioni dipenderanno dal fatto che lo spessore sia piccolo, ossia
trascurabile rispetto al raggio di curvatura corrispondente. Siccome di solito abbiamo due raggi di
curvatura lo spessore sarà piccolo quando sarà trascurabile rispetto al più piccolo dei raggi di
curvatura principali. Dopo la deformazione sarà cambiato tutto e il caso più semplice che possiamo
dire è che la deformazione sia inestensionale ossia ds0 sia sempre uguale anche se saranno cambiati
rx e φ. Evidentemente rx sarà diventato r’x e dφ sarà diventato dφ’. Se risolvo la disuguaglianza dirò
che dopo la deformazione io avrò un
e se mi sposto di z rispetto alla fibra media avrò
Dire che stiamo parlando di una deformazione inestensionale vuol dire semplicemente che io faccio
una ipotesi che ds0 e ds’0 siano uguali cioè che si sia avuta una rotazione delle facce esterne
dell’elementino come si vede in figura. E allora in questo caso evidentemente rx dφ e r’x dφ’ sono
uguali e quando io scrivo la deformazione εx , dove ho tutti i punti del mantello, io mi riferirò ,
siccome si tratta di una superficie curva, alla lunghezza d’arco e scriverò:
Quindi avrò che come al solito εx varia con lo spessore, la sua variazione lungo lo spessore dipende
dal rapporto z/rx e dipende dalla variazione dei raggi di curvatura. I segni sono così perché si parte
dall’idea che r’x sia più piccolo di rx . Per cui 1/ r’x è più grande per cui è uscito fuori così il segno -.
Nel momento in cui c’è una dipendenza di una εx da un raggio di curvatura, se vi ricordate la teoria
della trave, capite che sto parlando dei momenti perfetti. Questa deformazione inestensionale è
chiaramente legata a un comportamento flessionale della piastra curva. In generale la deformazione
non è inestensionale. Tra ds’0 e ds0 non esisterà una relazione di uguaglianza. Se voglio
quantificarla dirò che ds’0 è un quid in più di ds0. Quindi
scriverò:
dove ε1 è un allungamento nella direzione della superficie
media. Quando mi vado a calcolare la εx ecco comparire
una espressione più complicata in cui ho una deformazione
ε1 che non è uniforme nello spessore perché c’è z/rx e
questa stessa ε1, vedete mi trovo un termine estensionale ε1
e uno che è quello di prima flessionale, però in quello
flessionale ora compare anche un contributo che è quello
dell’estensibilità cioè della ε1. Ma quanto può essere
grande questa ε1? È molto piccola e quindi 1+ ε1 si può
approssimare con 1. E quindi ottengo:

65
Quindi in pratica riottengo la stessa espressione di prima e la mia ε è dovuta al termine estensionale
e a un termine flessionale. Scriverò quindi questo:
Avrò raggi di curvatura differenti e tensioni identiche. Se si tratta di una piastra sottile, quindi se z
massimo può essere trascurato rispetto al raggio di curvatura più piccolo, allora alcuni di questi
termini scompariranno e si avranno le seguenti equazioni:
ε1 è costante e χ1 è la variazione del raggio di curvatura. Stessa cosa nell’altro piano. In questa
maniera abbiamo completamente separato il caso estensionale dal caso flessionale.
Abbiamo introdotto una indipendenza dallo spessore perché praticamente è trascurabile e poiché ε1
e ε2 li vado a misurare nel piano medio e poiché rx e ry sono i ??????? di valori principali della
superficie media, io in completa analogia con quello che ho fatto per le piastre piane sto prendendo
lo studio di tutta la piastra a doppia curvatura e la sto riportando allo studio della sua superficie
media. Quindi sto facendo esattamente lo stesso percorso. Anche lì avevo la ε1 estensionale e la ε
flessionale solo che lì si trascurava la parte estensionale e qui si farà esattamente il contrario.
Parleremo solo del comportamento estensionale della superficie media. Quando potremo fare questo
diremo che il guscio ha un comportamento membranale. Un esempio di membrana sono le bolle di
sapone. Non reagiscono assolutamente flessionalmente ma reagiscono solo con degli sforzi tangenti
alla loro superficie media. Lo stato tensionale lo riteniamo piano e dalle precedenti espressioni
possiamo ricavarci le componenti di tensione:
Nel momento in cui parleremo di gusci a simmetria assiale viene meno anche la τ perché dipende da
φ e γ, lo stato flessionale lo
trascuriamo e i γ dipendono o dalla
variazione lungo l’angolo dello
spostamento radiale du/dθ e se c’è
simmetria assiale questa variazione
non ci può essere o dagli
spostamenti tangenziali perché se c’è
simmetria assiale non ci può essere
una v. L’unica componente di
spostamento che sussiste è la u,
spostamento radiale. Quando
parleremo dei gusci di rotazione in
simmetria assiale di carico, la τ sarà
zero e resteranno solo le altre due
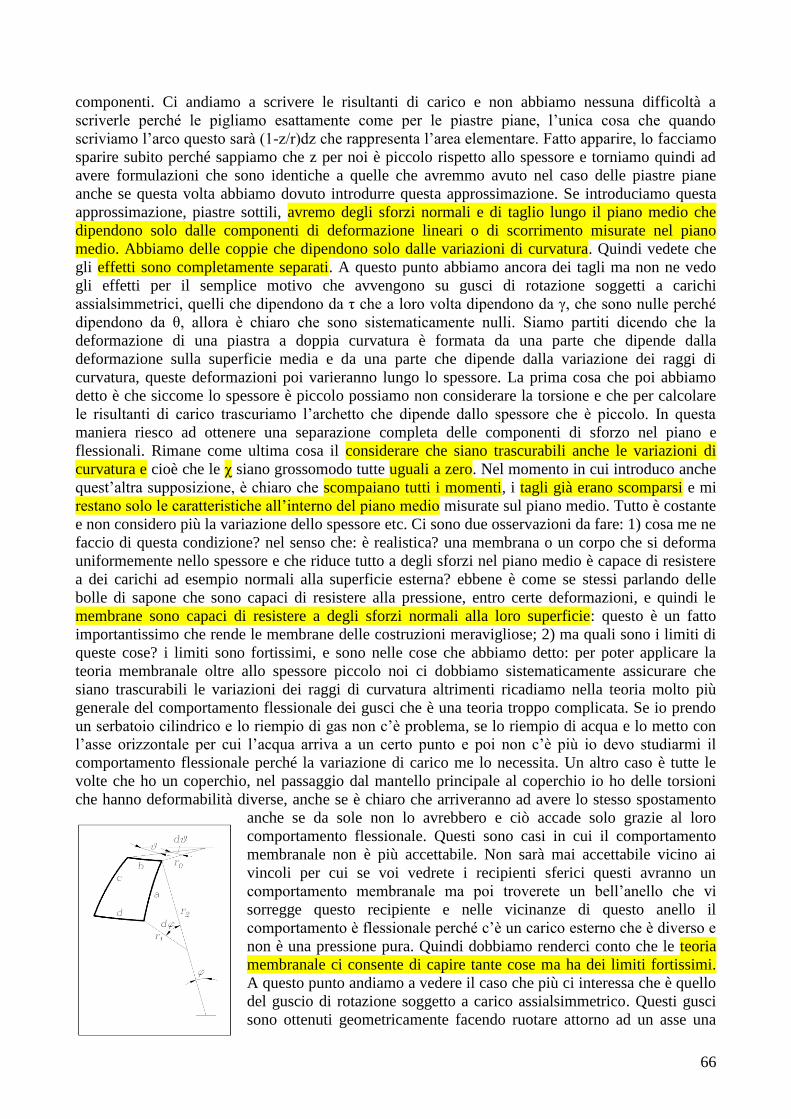
66
componenti. Ci andiamo a scrivere le risultanti di carico e non abbiamo nessuna difficoltà a
scriverle perché le pigliamo esattamente come per le piastre piane, l’unica cosa che quando
scriviamo l’arco questo sarà (1-z/r)dz che rappresenta l’area elementare. Fatto apparire, lo facciamo
sparire subito perché sappiamo che z per noi è piccolo rispetto allo spessore e torniamo quindi ad
avere formulazioni che sono identiche a quelle che avremmo avuto nel caso delle piastre piane
anche se questa volta abbiamo dovuto introdurre questa approssimazione. Se introduciamo questa
approssimazione, piastre sottili, avremo degli sforzi normali e di taglio lungo il piano medio che
dipendono solo dalle componenti di deformazione lineari o di scorrimento misurate nel piano
medio. Abbiamo delle coppie che dipendono solo dalle variazioni di curvatura. Quindi vedete che
gli effetti sono completamente separati. A questo punto abbiamo ancora dei tagli ma non ne vedo
gli effetti per il semplice motivo che avvengono su gusci di rotazione soggetti a carichi
assialsimmetrici, quelli che dipendono da τ che a loro volta dipendono da γ, che sono nulle perché
dipendono da θ, allora è chiaro che sono sistematicamente nulli. Siamo partiti dicendo che la
deformazione di una piastra a doppia curvatura è formata da una parte che dipende dalla
deformazione sulla superficie media e da una parte che dipende dalla variazione dei raggi di
curvatura, queste deformazioni poi varieranno lungo lo spessore. La prima cosa che poi abbiamo
detto è che siccome lo spessore è piccolo possiamo non considerare la torsione e che per calcolare
le risultanti di carico trascuriamo l’archetto che dipende dallo spessore che è piccolo. In questa
maniera riesco ad ottenere una separazione completa delle componenti di sforzo nel piano e
flessionali. Rimane come ultima cosa il considerare che siano trascurabili anche le variazioni di
curvatura e cioè che le χ siano grossomodo tutte uguali a zero. Nel momento in cui introduco anche
quest’altra supposizione, è chiaro che scompaiano tutti i momenti, i tagli già erano scomparsi e mi
restano solo le caratteristiche all’interno del piano medio misurate sul piano medio. Tutto è costante
e non considero più la variazione dello spessore etc. Ci sono due osservazioni da fare: 1) cosa me ne
faccio di questa condizione? nel senso che: è realistica? una membrana o un corpo che si deforma
uniformemente nello spessore e che riduce tutto a degli sforzi nel piano medio è capace di resistere
a dei carichi ad esempio normali alla superficie esterna? ebbene è come se stessi parlando delle
bolle di sapone che sono capaci di resistere alla pressione, entro certe deformazioni, e quindi le
membrane sono capaci di resistere a degli sforzi normali alla loro superficie: questo è un fatto
importantissimo che rende le membrane delle costruzioni meravigliose; 2) ma quali sono i limiti di
queste cose? i limiti sono fortissimi, e sono nelle cose che abbiamo detto: per poter applicare la
teoria membranale oltre allo spessore piccolo noi ci dobbiamo sistematicamente assicurare che
siano trascurabili le variazioni dei raggi di curvatura altrimenti ricadiamo nella teoria molto più
generale del comportamento flessionale dei gusci che è una teoria troppo complicata. Se io prendo
un serbatoio cilindrico e lo riempio di gas non c’è problema, se lo riempio di acqua e lo metto con
l’asse orizzontale per cui l’acqua arriva a un certo punto e poi non c’è più io devo studiarmi il
comportamento flessionale perché la variazione di carico me lo necessita. Un altro caso è tutte le
volte che ho un coperchio, nel passaggio dal mantello principale al coperchio io ho delle torsioni
che hanno deformabilità diverse, anche se è chiaro che arriveranno ad avere lo stesso spostamento
anche se da sole non lo avrebbero e ciò accade solo grazie al loro
comportamento flessionale. Questi sono casi in cui il comportamento
membranale non è più accettabile. Non sarà mai accettabile vicino ai
vincoli per cui se voi vedrete i recipienti sferici questi avranno un
comportamento membranale ma poi troverete un bell’anello che vi
sorregge questo recipiente e nelle vicinanze di questo anello il
comportamento è flessionale perché c’è un carico esterno che è diverso e
non è una pressione pura. Quindi dobbiamo renderci conto che le teoria
membranale ci consente di capire tante cose ma ha dei limiti fortissimi.
A questo punto andiamo a vedere il caso che più ci interessa che è quello
del guscio di rotazione soggetto a carico assialsimmetrico. Questi gusci
sono ottenuti geometricamente facendo ruotare attorno ad un asse una

67
curva che è il meridiano di questi recipienti e quindi avrò una curva, meridiano, che avrò fatto
ruotare attorno ad un asse. Questa curva presenterà una curvatura che ovviamente è uno dei raggi di
curvatura principali della superficie, quello indicato con r1, mentre l’altro lo avrò su un qualsiasi
piano radiale. Il teorema di Eulero ci dice che l’altro raggio di curvatura principale io lo dovrò
vedere in un piano perpendicolare al piano meridiano. Questo piano è quello che si chiama piano
normale e non è il piano che contiene il parallelo ma è un piano che ha un’altra direzione che è
molto scomodo da rintracciare per cui va a finire che tutto viene espresso in coordinate parallele.
Quando parlammo del teorema di (Wernier?) noi facemmo riferimento alla Terra e il raggio della
Terra non è uguale al raggio dell’equatore e i raggi principali della Terra in qualsiasi punto sono
due e coincidenti e sono lungo una normale alla superficie esterna mentre il piano del parallelo non
contiene la normale alla superficie esterna ed ecco perché questo non può essere il raggio principale
però pensando al teorema di W. è facile pensare che se ho un raggio parallelo r0 e l’anomalia del
punto rispetto al centro di curvatura dφ avrò:
La superficie elementare sarà divisa tra due meridiani molto vicini
distanti dθ tra loro e due sezioni normali (due piani perpendicolari
al piano meridiano contenenti la normale alla superficie). Questo
è quello che facciamo quando andiamo a considerare una
superficie sulla faccia della Terra che è delimitata da due
meridiani e due paralleli. Quella superficie terrestre è quindi
delimitata da quattro archi di cerchio, la lunghezza dell’arco di
cerchio più a sud a parità di angolo formato dai due meridiani non
è la stessa ( ardo b e arco d ) mentre i due archi a e c sono uguali.
Allora è chiaro che d sarà più grande di b però in realtà noi stiamo parlando di superficie elementare
e quindi stiamo parlando di dφ e dθ per cui con buone approssimazione possiamo dire che tra b e d
non c’è una grande differenza. A questo punto l’area elementare diventa semplicemente un
rettangolo mistilineo, ossia un rettangolo i cui lati sono sagomati come archi di circonferenza, e
quindi la sua superficie diventa uguale al prodotto di base per altezza. E questa sarà la superficie
elementare. Il problema è che questi gusci a quali carichi saranno sottoposti? Il guscio che stiamo
trattando ha un comportamento ???????? e quindi avrà degli sforzi in una direzione e degli sforzi
nell’altra direzione. Quindi degli sforzi che qui saranno perpendicolari all’arco b e quindi per essere
perpendicolari saranno sempre lungo la tangente al meridiano e avremo degli altri sforzi che
saranno perpendicolari agli a, quindi ai piani meridiani, e che quindi saranno diretti tangenzialmente
al parallelo. Quando noi parliamo di un elemento è chiaro che ci riferiamo a una figura
quadrangolare ma poi questa figura la dobbiamo accoppiare con delle direzioni e l’accoppiamo con
la direzione del parallelo medio e del meridiano medio. Presi il meridiano e il parallelo manca una
terza direzione che prendiamo nel punto di incontro la direzione della curvatura che chiamo
direzione radiale. In questo punto che è anche il centro di questa superficie io ritengo agenti i
carichi esterni. I carichi che avrò saranno quello normale (radiale) e quello lungo la tangente al
meridiano ma non quello lungo la tangente al parallelo perché devo avere l’assialsimmetria dei
carichi. Quando io ragiono in termini di risultati di sforzo interno parlo di un carico normale, una
forza per unità di lunghezza, applicata nel punto medio dei bordi della direzione delle tangenti al
meridiano e questo lo chiamo sforzo meridiano, e poi avrò nel punto medio degli altri due lati delle
forze che avranno la direzione della tangente al parallelo medio in questi punti e li chiamerò sforzi
paralleli. I primi li chiamo generalmente Nφ e i secondi Nθ. In generale il mio elemento è sopportato
a dei carichi radiali lungo il meridiano ed è sostenuto da sforzi interni che hanno delle risultanti di
taglio dirette lungo il meridiano e il parallelo. Va da se che gli Nφ possono cambiare ma gli Nθ non
possono farlo.
Ora cominceremo a costruirci l’equazione di equilibrio per questo elemento pezzo per pezzo.
Cominciamo dalle azioni lungo il meridiano. Mi sono messo in un piano meridiano per cui, a parte
l’effetto di curvatura, io vedo principalmente un archetto e la sua superficie media con delle

68
risultanti di carico Nφ da una parte e dall’altra. Queste
due risultanti unitarie non sono uguali tra di loro,
siccome tra questi due punti si è avuta una variazione
dell’angolo meridiano, allora la variazione tra i due
potrà essere posta in termini di sviluppo di Taylor.
Queste forze sono dirette lungo la tangente al
meridiano nei due punti. Esprimeremo le condizioni
di equilibrio in direzione radiale e tangente al
meridiano. Quando parlo di tangente al meridiano
parlo di tangente al punto medio. Quando parlo di
direzione radiale ce ne sono infinite ma io mi metto al
centro dell’elementino e sto considerando la direzione
radiale nel punto medio di tale elementino. Un’altra cosa di cui bisogna tener conto è che le
superfici sulle quali agiscono Nφ e N’φ sono diverse tra loro perché passo da un parallelo ad un
altro: quindi da un lato avrò r0dθ e dall’altro (r0dθ + r0dθdt/dt). Allora diremo che questa risultante
Nφ avrà una componente tangente e una perpendicolare ruotata di dφ/2. Quindi avrò una
Nφcos(dφ/2) che rappresenta la direzione tangenziale e una Nφsen(dφ/2) che mi rappresenta la
direzione radiale. Notate che le componenti tangenziali sono contrapposte da una parte e dall’altra
perché c’è il materiale che se lo tira dai due lati mentre le componenti radiali sono concorrenti e
centripete. Queste due forze danno luogo ad un’azione radiale diretta lungo il raggio medio:
Se sviluppo questa relazione e tolgo le parti di ordine superiore e considero il seno all’incirca
uguale all’angolo ottengo che alla fine mi resta:
L’azione tangenziale invece sarà:
Andiamo a vedere ora quelle che sono le
azioni dirette lungo il parallelo dove avrò le
due Nθ che sono uguali perché c’è una
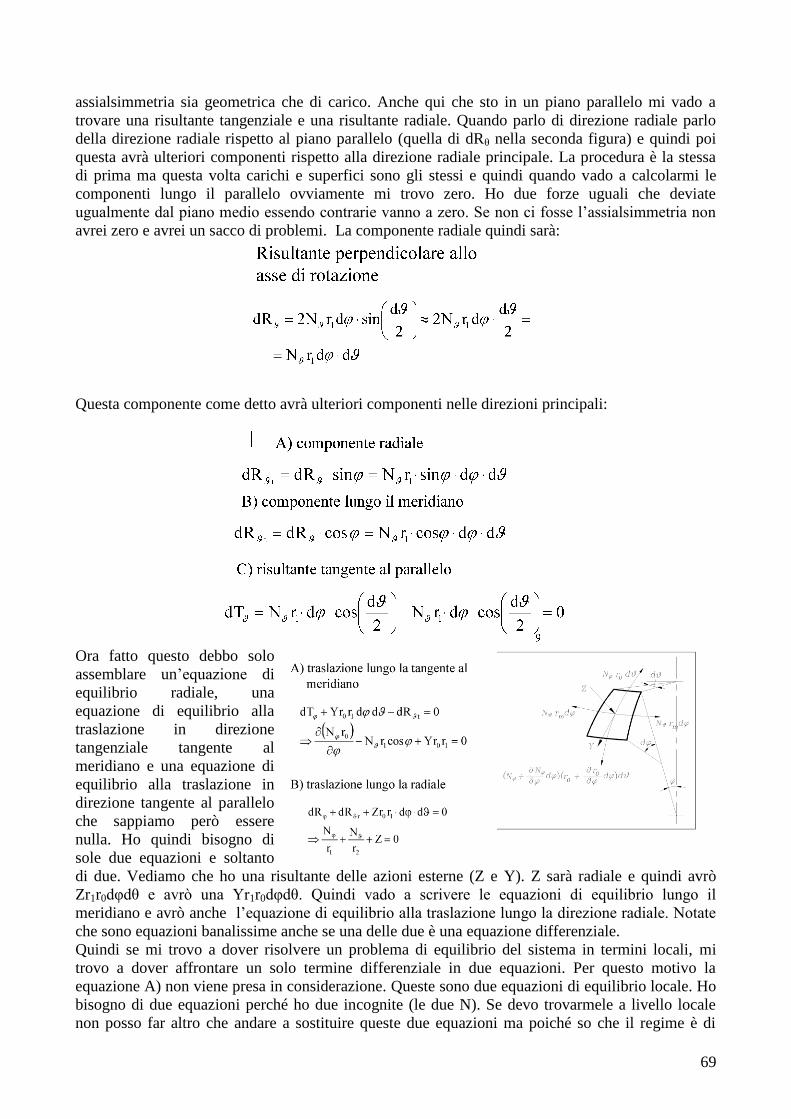
69
assialsimmetria sia geometrica che di carico. Anche qui che sto in un piano parallelo mi vado a
trovare una risultante tangenziale e una risultante radiale. Quando parlo di direzione radiale parlo
della direzione radiale rispetto al piano parallelo (quella di dRθ nella seconda figura) e quindi poi
questa avrà ulteriori componenti rispetto alla direzione radiale principale. La procedura è la stessa
di prima ma questa volta carichi e superfici sono gli stessi e quindi quando vado a calcolarmi le
componenti lungo il parallelo ovviamente mi trovo zero. Ho due forze uguali che deviate
ugualmente dal piano medio essendo contrarie vanno a zero. Se non ci fosse l’assialsimmetria non
avrei zero e avrei un sacco di problemi. La componente radiale quindi sarà:
Questa componente come detto avrà ulteriori componenti nelle direzioni principali:
Ora fatto questo debbo solo
assemblare un’equazione di
equilibrio radiale, una
equazione di equilibrio alla
traslazione in direzione
tangenziale tangente al
meridiano e una equazione di
equilibrio alla traslazione in
direzione tangente al parallelo
che sappiamo però essere
nulla. Ho quindi bisogno di
sole due equazioni e soltanto
di due. Vediamo che ho una risultante delle azioni esterne (Z e Y). Z sarà radiale e quindi avrò
Zr1r0dφdθ e avrò una Yr1r0dφdθ. Quindi vado a scrivere le equazioni di equilibrio lungo il
meridiano e avrò anche l’equazione di equilibrio alla traslazione lungo la direzione radiale. Notate
che sono equazioni banalissime anche se una delle due è una equazione differenziale.
Quindi se mi trovo a dover risolvere un problema di equilibrio del sistema in termini locali, mi
trovo a dover affrontare un solo termine differenziale in due equazioni. Per questo motivo la
equazione A) non viene presa in considerazione. Queste sono due equazioni di equilibrio locale. Ho
bisogno di due equazioni perché ho due incognite (le due N). Se devo trovarmele a livello locale
non posso far altro che andare a sostituire queste due equazioni ma poiché so che il regime è di

70
assialsimmetria io potrei cercare di utilizzare questa condizione per non andare a prendere in
considerazione una equazione di equilibrio locale ma quella globale ed è quello che si fa. Quindi si
finisce per accoppiare all’equazione B) una equazione di equilibrio globale in modo tale da ottenere
due soluzioni algebriche e il problema diventa banalissimo.
Supponiamo di aver eseguito la sezione di questo guscio di
rotazione e supponiamo che i carichi esterni abbiano in tutta
questa struttura una risultante complessiva assiale R e solo
questa perché non sto facendo una relazione per l’equilibrio
alla traslazione radiale. In direzione circonferenziale non
l’avranno mai perché sennò non sarebbe assialsimmetrico.
Sotto l’azione di questa R, io avrò, una volta che ho fatto la
sezione normale che fa uscir fuori un cono, tante NφdA che
avranno una componente assiale che sarà NφdAsenφ e
avranno una componente radiale NφdAcosφ. Andiamo ora a
fare le risultanti. Queste Nφ per simmetria assiale sono tutte uguali fra di loro e quindi lo saranno le
loro componenti assiali e in modulo le radiali e quindi la somma di queste ultime è ovviamente
zero. Restano solo le componenti assiali che sono tutte uguali fra di loro ma equiverse e quindi ne
farò gli integrali lungo θ ottenendo proprio 2π. Questa sarà la risultante degli sforzi interni e la R
quella degli sforzi esterni e la loro somma sarà uguale a zero. Quindi dall’equazione di equilibrio
globale mi ricavo la Nφ mentre dall’equazione di equilibrio locale mi ricavo la Nθ. Una volta
ricavate queste due posso passare alle componenti di tensione ritenendole fortemente dipendenti
dallo spessore (s) e trovo:
Sono tensioni principali e non ci sono sforzi di taglio o tensioni radiali. Ho delle tensioni meridiane
e parallele. Il problema è che se voglio utilizzare queste due equazioni debbo fare uno studio
geometrico e andarmi a trovare i raggi di curvatura. Se io ho una superficie a doppia curvatura
ottenuta per rotazione di una curva meridiana intorno ad un asse allora i due raggi di curvatura sono
questi:
Quindi se si scrive l’equazione della curva vi ricavate i due raggi in ogni punto e quindi in ogni
punto potete ricavarvi gli sforzi membranali.
Lasciando stare i primi due esempi banali passiamo a considerare quello che può essere un
problema ingegneristico come la volta sferica pesante che non è altro che una cupola. Supponiamo
di avere una cupola che ha un peso per unità di superficie q e torno torno quindi ho una qdA. La dA
essendo questa una sfera di raggio a sarà ovviamente un 2πau ma posso esprimerla anche attraverso
l’uso dei raggi di curvatura:
Io suppongo che di questa sfera ne adoperi solo una parte, una volta o una calotta, definita da φ per
cui in questo caso ho utilizzato φ come estremo superiore dell’angolo e non come valore corrente
che invece ho chiamato u[0,φ]. Allora su ogni dA c’è una qdA, conviene portarsi alla superficie
anulare, pareggiare l’integrale in dθ e sostituirlo con 2π e avrò:
Questa è la risultante delle forze peso (forze assiali) che mi debbono dare anche forze radiali. Le
equazioni di equilibrio che ottengo sono:
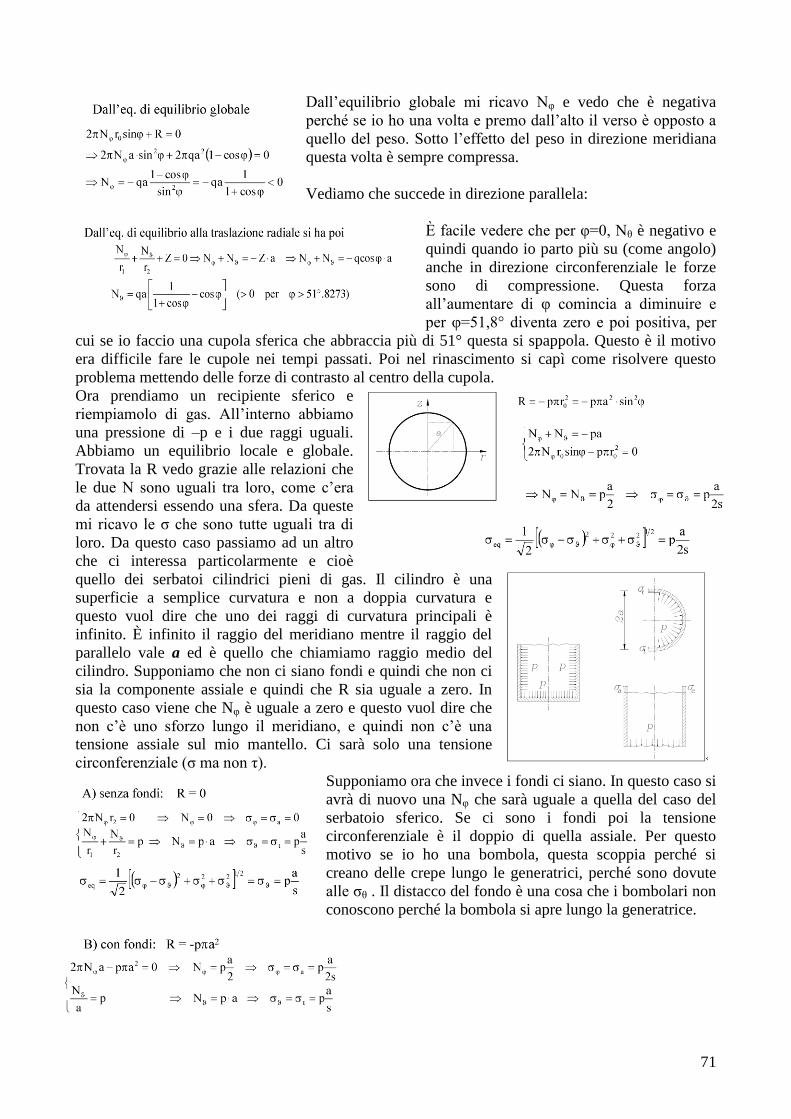
71
Dall’equilibrio globale mi ricavo Nφ e vedo che è negativa
perché se io ho una volta e premo dall’alto il verso è opposto a
quello del peso. Sotto l’effetto del peso in direzione meridiana
questa volta è sempre compressa.
Vediamo che succede in direzione parallela:
È facile vedere che per φ=0, Nθ è negativo e
quindi quando io parto più su (come angolo)
anche in direzione circonferenziale le forze
sono di compressione. Questa forza
all’aumentare di φ comincia a diminuire e
per φ=51,8° diventa zero e poi positiva, per
cui se io faccio una cupola sferica che abbraccia più di 51° questa si spappola. Questo è il motivo
era difficile fare le cupole nei tempi passati. Poi nel rinascimento si capì come risolvere questo
problema mettendo delle forze di contrasto al centro della cupola.
Ora prendiamo un recipiente sferico e
riempiamolo di gas. All’interno abbiamo
una pressione di –p e i due raggi uguali.
Abbiamo un equilibrio locale e globale.
Trovata la R vedo grazie alle relazioni che
le due N sono uguali tra loro, come c’era
da attendersi essendo una sfera. Da queste
mi ricavo le σ che sono tutte uguali tra di
loro. Da questo caso passiamo ad un altro
che ci interessa particolarmente e cioè
quello dei serbatoi cilindrici pieni di gas. Il cilindro è una
superficie a semplice curvatura e non a doppia curvatura e
questo vuol dire che uno dei raggi di curvatura principali è
infinito. È infinito il raggio del meridiano mentre il raggio del
parallelo vale a ed è quello che chiamiamo raggio medio del
cilindro. Supponiamo che non ci siano fondi e quindi che non ci
sia la componente assiale e quindi che R sia uguale a zero. In
questo caso viene che Nφ è uguale a zero e questo vuol dire che
non c’è uno sforzo lungo il meridiano, e quindi non c’è una
tensione assiale sul mio mantello. Ci sarà solo una tensione
circonferenziale (σ ma non τ).
Supponiamo ora che invece i fondi ci siano. In questo caso si
avrà di nuovo una Nφ che sarà uguale a quella del caso del
serbatoio sferico. Se ci sono i fondi poi la tensione
circonferenziale è il doppio di quella assiale. Per questo
motivo se io ho una bombola, questa scoppia perché si
creano delle crepe lungo le generatrici, perché sono dovute
alle σθ . Il distacco del fondo è una cosa che i bombolari non
conoscono perché la bombola si apre lungo la generatrice.

72
Queste due equazioni ve le ho fatte vedere secondo la teoria dei gusci membranali. Ma l’uomo le
conosceva già da tempo sotto il nome di formule delle caldaie perché quando parliamo di caldaie
parliamo di tubi e mantelli soggetti a pressioni interne. Quando si cominciò ad utilizzare la
macchina a vapore questa scoppiava perché non si conoscevano fenomeni come la fatica, la fatica
termica, non si sapeva come realizzare le tenute. Quindi ci si pose il problema di dimensionare i
mantelli delle caldaie. Da qui nacquero le formule delle caldaie che sono banalissime. Io ho una
tensione assiale che agisce su di un’area che è 2πas e questa deve essere uguale al carico che ho sul
fondo pπa2. Circonferenzialmente io prendo metà tubo. Il carico è dovuto alla pressione interna e
deve essere equilibrato dalle σt.
Così posso analizzare anche i serbatoi conici che è un’altra forma a semplice curvatura (r1=∞). α è
la conicità del recipiente, h è la quota a cui mi metto. Il metodo è praticamente sempre lo stesso.

73
Vi faccio un ultimo caso che è un po’ diverso dagli altri perché fino
ad ora abbiamo sempre trattato gas. La pressione non è più
uniforme ma essendo un liquido cambia con la profondità: sul pelo
libero avrò p0 mentre scendendo avrò p=p0+γ(H-h). Se voglio
sapere quali siano gli sforzi all’altezza h divido in due l’equazione
di equilibrio. Da una parte considero una parte di acqua e dall’altra
la restante. Mi calcolo quindi il peso della colonna d’acqua e quindi
mi debbo calcolare il volume. Quindi dovrò calcolarmi il volume
del cilindro e del cono. Quindi ottengo la pressione variabile e
nell’equilibrio globale ho il volume variabile con la profondità.
Supponendo che non ci sia una pressione esterna, ho che sul vertice sono nulli tutti e due gli sforzi,
mentre sulla superficie del liquido non ci sono sforzi circonferenziali ma solo sforzo meridiano.
Questo mi ha dato l’idea di andare a vedere a quale quota c’è lo sforzo meridiano massimo.
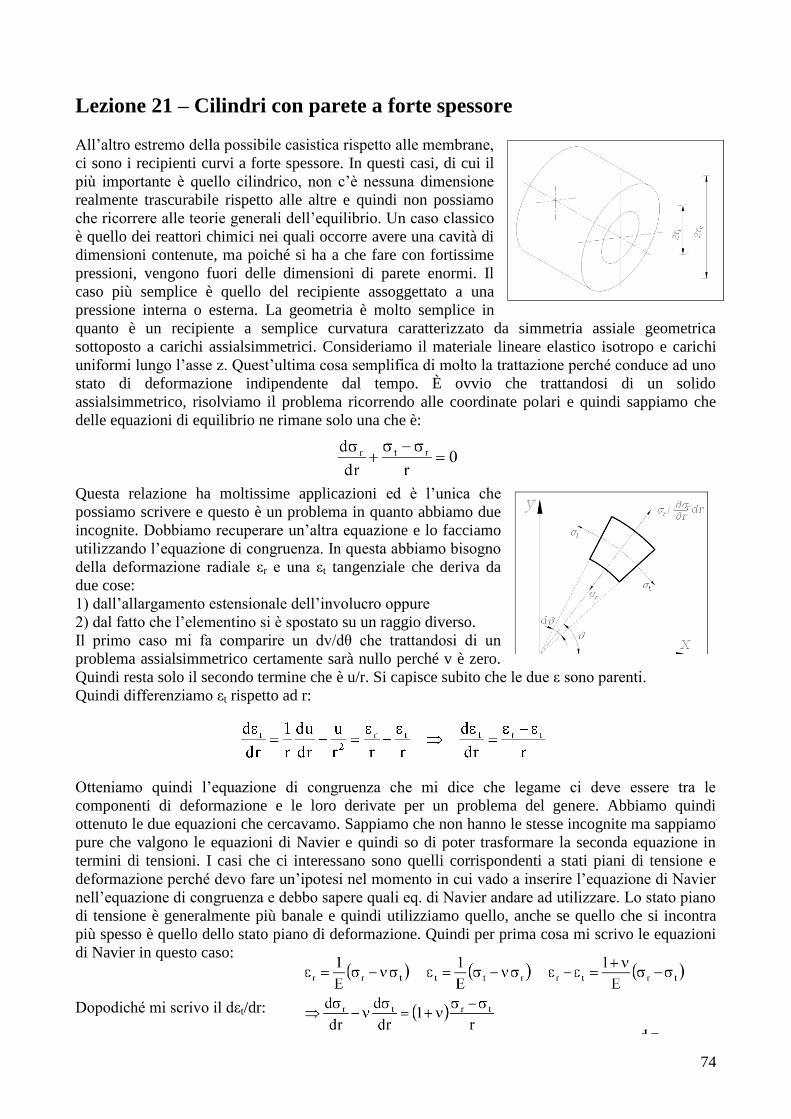
74
Lezione 21 – Cilindri con parete a forte spessore
All’altro estremo della possibile casistica rispetto alle membrane,
ci sono i recipienti curvi a forte spessore. In questi casi, di cui il
più importante è quello cilindrico, non c’è nessuna dimensione
realmente trascurabile rispetto alle altre e quindi non possiamo
che ricorrere alle teorie generali dell’equilibrio. Un caso classico
è quello dei reattori chimici nei quali occorre avere una cavità di
dimensioni contenute, ma poiché si ha a che fare con fortissime
pressioni, vengono fuori delle dimensioni di parete enormi. Il
caso più semplice è quello del recipiente assoggettato a una
pressione interna o esterna. La geometria è molto semplice in
quanto è un recipiente a semplice curvatura caratterizzato da simmetria assiale geometrica
sottoposto a carichi assialsimmetrici. Consideriamo il materiale lineare elastico isotropo e carichi
uniformi lungo l’asse z. Quest’ultima cosa semplifica di molto la trattazione perché conduce ad uno
stato di deformazione indipendente dal tempo. È ovvio che trattandosi di un solido
assialsimmetrico, risolviamo il problema ricorrendo alle coordinate polari e quindi sappiamo che
delle equazioni di equilibrio ne rimane solo una che è:
Questa relazione ha moltissime applicazioni ed è l’unica che
possiamo scrivere e questo è un problema in quanto abbiamo due
incognite. Dobbiamo recuperare un’altra equazione e lo facciamo
utilizzando l’equazione di congruenza. In questa abbiamo bisogno
della deformazione radiale εr e una εt tangenziale che deriva da
due cose:
1) dall’allargamento estensionale dell’involucro oppure
2) dal fatto che l’elementino si è spostato su un raggio diverso.
Il primo caso mi fa comparire un dv/dθ che trattandosi di un
problema assialsimmetrico certamente sarà nullo perché v è zero.
Quindi resta solo il secondo termine che è u/r. Si capisce subito che le due ε sono parenti.
Quindi differenziamo εt rispetto ad r:
Otteniamo quindi l’equazione di congruenza che mi dice che legame ci deve essere tra le
componenti di deformazione e le loro derivate per un problema del genere. Abbiamo quindi
ottenuto le due equazioni che cercavamo. Sappiamo che non hanno le stesse incognite ma sappiamo
pure che valgono le equazioni di Navier e quindi so di poter trasformare la seconda equazione in
termini di tensioni. I casi che ci interessano sono quelli corrispondenti a stati piani di tensione e
deformazione perché devo fare un’ipotesi nel momento in cui vado a inserire l’equazione di Navier
nell’equazione di congruenza e debbo sapere quali eq. di Navier andare ad utilizzare. Lo stato piano
di tensione è generalmente più banale e quindi utilizziamo quello, anche se quello che si incontra
più spesso è quello dello stato piano di deformazione. Quindi per prima cosa mi scrivo le equazioni
di Navier in questo caso:
Dopodiché mi scrivo il dεt/dr:
75
Poi faccio qualche giochetto per trovarmi dall’equazione di equilibrio la σt :
Sostituisco nell’equazione di congruenza e ottengo una equazione nella sola incognita σr:
Il resto è banale integrazione:
Dall’eq. di equilibrio poi ottengo:
Di solito questa soluzione la scrivo come:
Come si vede entrambe le tensioni diminuiscono all’aumentare di r e quindi il bordo interno è
sempre più caricato. Quello che debbo calcolarmi sono le due costanti A e B. Poiché avrò delle
pressioni agenti sul bordo interno ed esterno. Quindi la tensione radiale sarà uguale a meno l’una e
meno l’altra:
Da queste sostituendo al posto di σr il termine A-B/r2 ottengo:
Queste equazioni spesso vengono presentate nella forma più adimensionalizzata possibile. I raggi
vengono adimensionalizzati rispetto al raggio esterno. Viene preso un raggio che caratterizzi la
geometria, β, che sarà parecchio minore di uno, e poi avremo una variabile corrente, r, che viene
adimensionalizzata tramite ρ:
Da qui otteniamo queste relazioni:

76
Qualcuno prosegue questa operazione di adimensionalizzazione scrivendo:
E allora le relazioni diventano:
È importante capire invece cosa accade realmente. Allora supponiamo di avere una pressione
interna, pi, e di non avere pressione esterna. Avremo che k=0. Quindi si vede come le tensioni in
questo caso, a parte il termine geometrico, dipendano da 1±1/ρ2:
Particolarizzandola per raggio interno e raggio esterno vedete che il valore massimo in assoluto
deve verificarsi al raggio interno. Quindi nel caso di recipiente cilindrico sottoposto a pressione
interna la tensione radiale è sempre negativa e va da –p a 0, mentre la tensione circonferenziale è
sempre positiva e va da un valore massimo al bordo interno a un minimo diverso da 0 al bordo
esterno. È sicuramente diverso da 0 perché la tensione circonferenziale non ha niente a che fare con
il carico applicato. Vi ho poi riportato i rapporti tra le tensioni di confronto all’interno e all’esterno
perché questa tensione comunque diminuisce dal bordo interno al bordo esterno. Io non voglio che
questo rapporto sia enorme perché, sapendo che comunque la tensione di confronto deve essere
minore a quella ammissibile al bordo interno, il materiale che sta al bordo esterno è poco sfruttato.
Quindi io voglio che il rapporto tra la tensione in rapporto al bordo esterno e al bordo interno non
superi un valore massimo che io posso imporre a progetto e chiamerò μ.
Impostato questo massimo verrà fuori poi un valore minimo di β. Al diminuire di β il rapporto tra le
tensioni di confronto aumenta e quindi se io voglio contenere tale rapporto non posso avere β più
piccolo di un certo valore. Questo mi comporterà dei forti raggi (interni!?).
Nell’altro caso abbiamo una pressione posta all’esterno del recipiente. Da qui appare un β2 in
parentesi e posso fare le stesse considerazioni dette per l’altro caso.
Per l’ipotesi di stato piano di deformazione dove siccome deve essere da questo
si ottiene che la tensione assiale è costante:
Ho preparato un esempio da guardare qualitativamente e riguarda un impianto di estrusione
dell’alluminio. La billetta viene caricata all’interno del container, che è un recipiente cilindrico di
grosso spessore, e viene appoggiata alla matrice di estrusione. Avrà un diametro di un paio di metri
e la lunghezza di circa un metro e mezzo, ha un foro interno del diametro della billetta. Si introduce
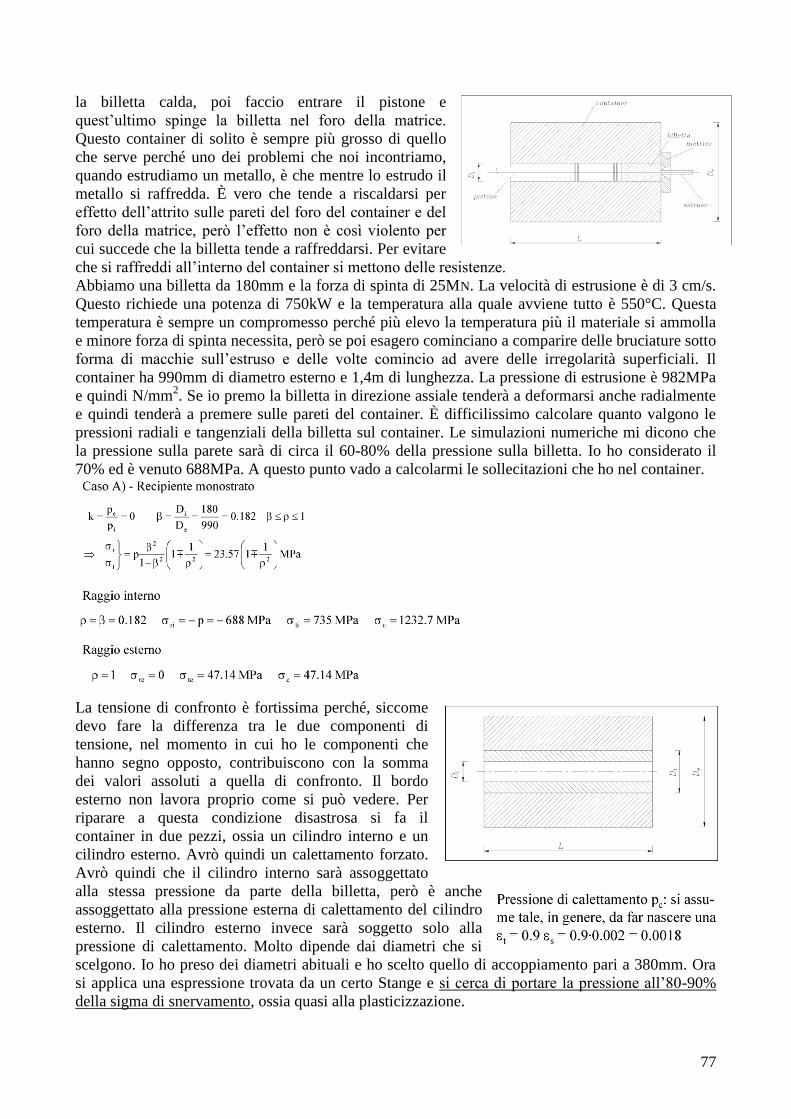
77
la billetta calda, poi faccio entrare il pistone e
quest’ultimo spinge la billetta nel foro della matrice.
Questo container di solito è sempre più grosso di quello
che serve perché uno dei problemi che noi incontriamo,
quando estrudiamo un metallo, è che mentre lo estrudo il
metallo si raffredda. È vero che tende a riscaldarsi per
effetto dell’attrito sulle pareti del foro del container e del
foro della matrice, però l’effetto non è così violento per
cui succede che la billetta tende a raffreddarsi. Per evitare
che si raffreddi all’interno del container si mettono delle resistenze.
Abbiamo una billetta da 180mm e la forza di spinta di 25MN. La velocità di estrusione è di 3 cm/s.
Questo richiede una potenza di 750kW e la temperatura alla quale avviene tutto è 550°C. Questa
temperatura è sempre un compromesso perché più elevo la temperatura più il materiale si ammolla
e minore forza di spinta necessita, però se poi esagero cominciano a comparire delle bruciature sotto
forma di macchie sull’estruso e delle volte comincio ad avere delle irregolarità superficiali. Il
container ha 990mm di diametro esterno e 1,4m di lunghezza. La pressione di estrusione è 982MPa
e quindi N/mm2. Se io premo la billetta in direzione assiale tenderà a deformarsi anche radialmente
e quindi tenderà a premere sulle pareti del container. È difficilissimo calcolare quanto valgono le
pressioni radiali e tangenziali della billetta sul container. Le simulazioni numeriche mi dicono che
la pressione sulla parete sarà di circa il 60-80% della pressione sulla billetta. Io ho considerato il
70% ed è venuto 688MPa. A questo punto vado a calcolarmi le sollecitazioni che ho nel container.
La tensione di confronto è fortissima perché, siccome
devo fare la differenza tra le due componenti di
tensione, nel momento in cui ho le componenti che
hanno segno opposto, contribuiscono con la somma
dei valori assoluti a quella di confronto. Il bordo
esterno non lavora proprio come si può vedere. Per
riparare a questa condizione disastrosa si fa il
container in due pezzi, ossia un cilindro interno e un
cilindro esterno. Avrò quindi un calettamento forzato.
Avrò quindi che il cilindro interno sarà assoggettato
alla stessa pressione da parte della billetta, però è anche
assoggettato alla pressione esterna di calettamento del cilindro
esterno. Il cilindro esterno invece sarà soggetto solo alla
pressione di calettamento. Molto dipende dai diametri che si
scelgono. Io ho preso dei diametri abituali e ho scelto quello di accoppiamento pari a 380mm. Ora
si applica una espressione trovata da un certo Stange e si cerca di portare la pressione all’80-90%
della sigma di snervamento, ossia quasi alla plasticizzazione.

78
Trovata la pressione di calettamento (111MPa) si vanno a prendere le tabelle delle tolleranze e si
vede quale accoppiamento porti a una deformazione tale da creare una pressione vicina a quella di
calettamento.
Naturalmente fatti questi calcoli devo sovrapporre gli effetti.
Come si vede la pressione sul raggio interno è scesa da oltre 1200 a 991MPa perché c’ho un effetto
di contrapposizione tra la pressione esterna e quella interna. Se mi metto invece sul raggio esterno
vedo che la tensione di confronto è salita fino a 85MPa, il che mi fa piacere perché sfrutto meglio il
materiale. Si può ottenere ancora di più facendo un terzo strato. Avrò un calettamento a 300mm e
uno a 500mm. Mi calcolo le pressioni di calettamento su tutti i cilindri.
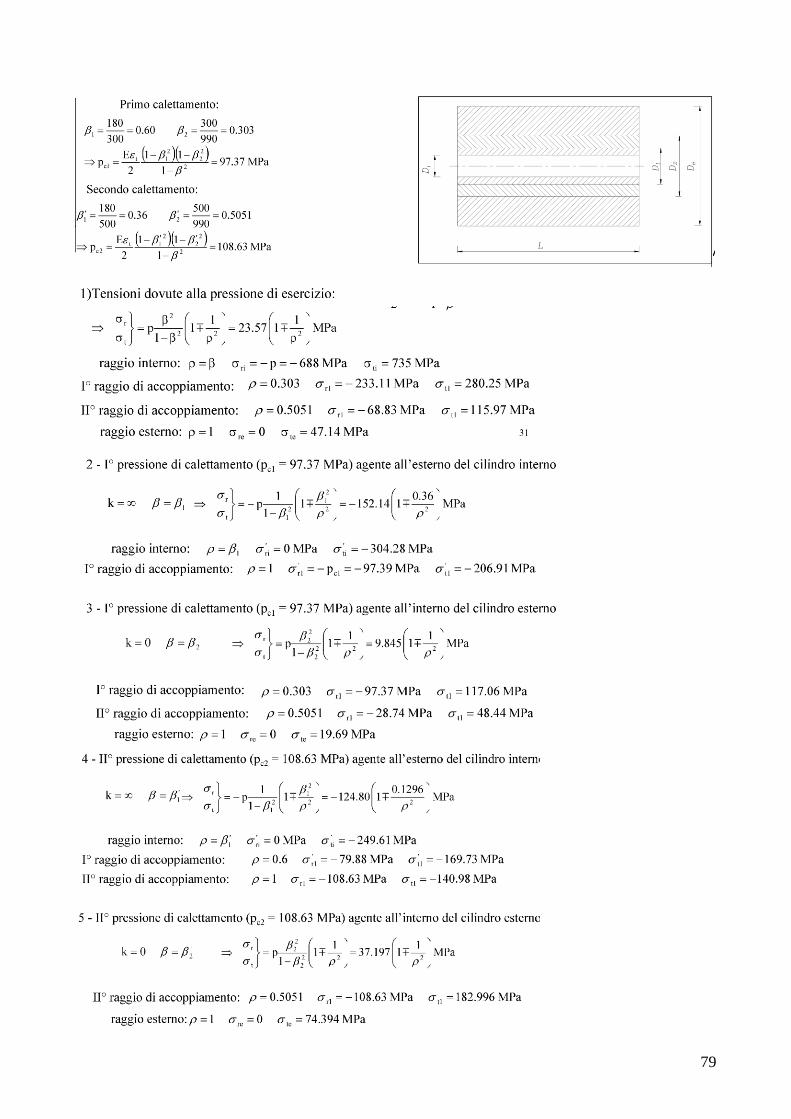
79
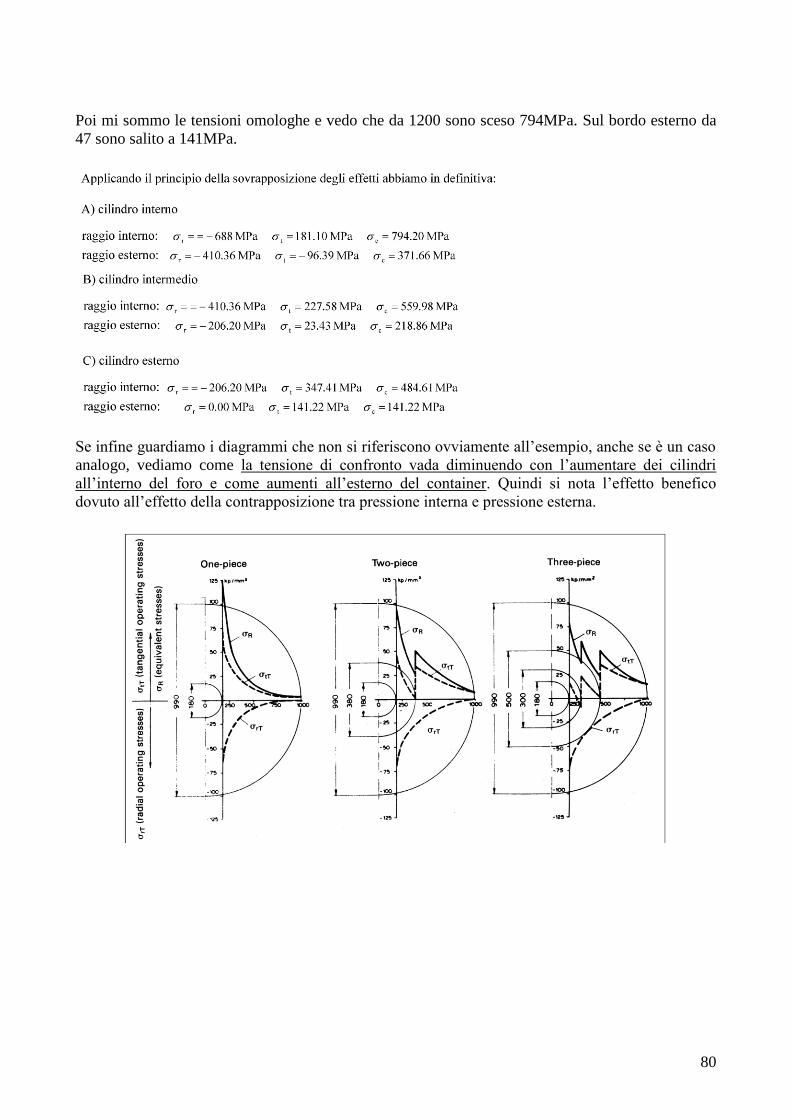
80
Poi mi sommo le tensioni omologhe e vedo che da 1200 sono sceso 794MPa. Sul bordo esterno da
47 sono salito a 141MPa.
Se infine guardiamo i diagrammi che non si riferiscono ovviamente all’esempio, anche se è un caso
analogo, vediamo come la tensione di confronto vada diminuendo con l’aumentare dei cilindri
all’interno del foro e come aumenti all’esterno del container. Quindi si nota l’effetto benefico
dovuto all’effetto della contrapposizione tra pressione interna e pressione esterna.

![181A - Rombi - Elementi di costruzione di macchine esercizi ...Centro Stampa Politecnico di Torino NUMERO : DATA : / /2011 APPUNTI STUDENTE 5RPEL MATERIA (OHPHQWL GL &RVWUX]LRQH GL](https://img.pdfslide.tips/doc/110x75/60c4f7531a0ff420d850826d/181a-rombi-elementi-di-costruzione-di-macchine-esercizi-centro-stampa-politecnico.jpg)





![[Costruzione Di Macchine - Juvinall] Fondamenti Di Progettazione Organi Di Macchine (876pg)](https://img.pdfslide.tips/doc/110x75/557210fa497959fc0b8e0cb5/costruzione-di-macchine-juvinall-fondamenti-di-progettazione-organi-di-macchine-876pg.jpg)




















