-
Chapter 1
Introduccin
El objetivo principal de estos apuntes es que permitan aprender
y entender la esencia de los mtodos
de optimizacin en forma clara y didctica. El objetivo no es slo
que los alumnos sepan modelar
y resolver problemas, sino que tambin puedan comprender su
resolucin.
Los mtodos de optimizacin son un conjunto de herramientas
cuantitativas muy poderosas
para enfrentar, modelar y resolver importantes problemas reales
en los ms diversos mbitos (no se
limita slo a ingeniera). El objetivo de este texto es apoyar al
curso de Optimizacin de la Escuela
de Ingeniera de la Pontificia Universidad Catlica de Chile para
que los alumnos puedan llegar un
poco ms lejos que las clases, o para que lo puedan utilizar como
apoyo en el futuro para enfrentar
problemas de optimizacin en otros cursos de la carrera o en sus
trabajos.
Creemos muy necesario que la recopilacin y creacin de estos
apuntes de mtodos de opti-
mizacin debe ser muy clara y didctica para explicar los
conceptos. El lector podr entender
el mecanismo detrs de los diferentes mtodos y as estar preparado
para poder discernir entre
soluciones correctas e incorrectas.
Durante nuestros aos de doctorado en M.I.T. y Berkeley
(1997-2002) tuvimos la oportunidad
de tomar varios cursos de investigacin de operaciones donde
juntamos bastante material de primer
nivel, que se ha incorporado en estos apuntes.
El contenido de estos apuntes a nivel general es:
Introduccin: Se dan algunas nociones de qu es un modelo y de cmo
se construyen. Sepresentan algunos modelos equivalentes, y se
revisan algunas nociones de convexidad.
Programacin No Lineal: Condiciones necesarias y suficientes para
un mnimo local o global;Mtodos de bsqueda de soluciones ptimas
(Gradiente, Newton, etc.)
Programacin Lineal: Formulacin y forma estndar de problemas
lineales; Geometra deproblemas lineales; Mtodo Simplex; Anlisis de
sensibilidad; Teora de dualidad.
Programacin Entera: Formulacin de modelos de programacin entera;
Algoritmo Branch& Bound; Algoritmo de planos cortantes.
Flujo en Redes: Modelos clsicos como ruta ms corta y mximo
flujo.
1
-
2 CHAPTER 1. INTRODUCCIN
Programacin Dinmica: Mtodo de resolucin cuando hay relaciones
intertemporales entrelas variables del problema.
A pesar de que estos apuntes no pretenden ser una gua de
ejercicios, incorporan ejercicios
resueltos en su gran mayora a modo de ilustrar mejor cada uno de
los conceptos tratados. Adems
se incorporar breves instrucciones de cmo operar el mdulo de
optimizacin de Microsoft Excel,
y de lenguajes de modelacin algebraica como AMPL y SML.
Este texto se encuentra en formato PDF en la pgina web del curso
de Optimizacin, de manera
que los alumnos (y ex-alumnos) puedan tener acceso a la ms
reciente versin.
1.1 Introduccin al Modelamiento
Cotidianamente nos enfrentamos a la necesidad de decidir,
evaluando opciones o cursos de accin
a seguir entre los cuales escoger la mejor alternativa. Si la
opcin es nica, la decisin ya est
tomada, pero si son muchas o infinitas, entonces identificarlas
y escoger la preferida puede ser muy
complejo. Incluso, cuando la opcin debe ser tomada por un grupo
de personas, unos pueden tener
diferentes visiones que otros. Para poder comparar las distintas
alternativas hay que establecer
explcitamente los objetivos que se persiguen con la decisin, y
as lograr ordenar las opciones
disponibles de la mejor forma. Esta tarea (identificar opciones
y clasificar objetivos) suele ser no
trivial.
Cuando el problema es complejo y resulta difcil identificar las
opciones disponibles y/o escoger
la mejor, muchas veces se recurre a modelos como un recurso de
apoyo. Los modelos permiten tomar
una decisin ms eficientemente; esto es ms rpidamente,
econmicamente, informadamente, etc.
1.2 Qu es un modelo?
El trmino modelo se usa para hablar de una estructura que se ha
construido y que exhibe
caractersticas de un sistema. Philippi (1981) define un modelo
como una simplificacin de alguna
realidad concreta orientada a nuestros propsitos. En otras
palabras, es una caricatura de la
realidad, que captura los factores dominantes que determinan el
comportamiento del sistema en
estudio.
Un modelo debe seleccionar las caractersticas ms relevantes de
la realidad, pues normalmente
no pueden considerarse todos sus aspectos. Las caractersticas a
considerar dependern del uso
que se le dar al modelo. Esto produce un trade-off entre la
complejidad del modelo y las
caractersticas consideradas. As, la simplicidad debe estar en la
mente de todo modelador.
Algunos modelos son tangibles como por ejemplo los aeromodelos,
mapas y maquetas arquitec-
tnicas. Por ejemplo los aeromodelos renen las caractersticas de
vuelo de los aviones reales, ya que
ese es el uso que se les dar, es decir, la atencin se centra en
su diseo, resistencia, aerodinmica,
por lo que, en este caso, los asientos no se ponen ya que son
irrelevantes para el objetivo.
-
1.3. POR QU SE CONSTRUYEN MODELOS? 3
Normalmente en Investigacin de Operaciones (IO1) se usan modelos
abstractos. Estos por
lo general, sern matemticos, donde los smbolos algebraicos
reflejarn las relaciones internas del
sistema modelado. As, una caracterstica esencial de un modelo
matemtico en IO, es que contiene
las relaciones matemticas relevantes (ecuaciones, inecuaciones,
dependencias lgicas, etc) que se
extraen al observar el mundo real.
1.3 Por qu se construyen modelos?
i) Clarifica las relaciones existentes, no siempre claras para
el observador. Se comprende mejor
el sistema. Ayuda a identificar las alternativas. Es como una
metodologa de aprendizaje. Por
ejemplo en un mapa se clarifican las rutas posibles para llegar
de un lugar a otro. En muchas
disciplinas (la fsica por ejemplo) los modelos no se usan para
decidir sino que para comprender
mejor.
ii) Permite un anlisis metdico cuyo fin sea sugerir lneas de
accin, no evidentes de otro
modo. Por ejemplo una maqueta de una casa ayuda a decidir mejor
como orientar los espacios, la
iluminacin, etc.
iii) Un modelo permite experimentar en l, cosa que no siempre es
posible en el sistema real
(Ej: avin, planta manufacturera, economa de un pas, etc).
Estas tres razones son tambin vlidas para construir modelos
matemticos que permiten exper-
imentar con sistemas complejos de gran tamao, considerar muchas
alternativas simultneamente
(sin necesidad de enumerarlas a priori) e identificar un mejor
(u ptimo) curso de accin.
Es importante distinguir entre modelo y datos. El modelo queda
definido por las relaciones
que tiene incorporado. La idea es que los modelos tengan validez
independiente de los datos que
se incorporarn. Sin embargo, hay veces que los modelos tienen
validez slo en un rango de datos
permitido. (Ej: Fluidez de un slido sujeto a tensiones
(Resistencia de materiales)).
Los modelos de Programacin Matemtica son los ms comnmente
usados. Otros ejemplos
de modelos de uso frecuente son: simulacin (modelos muy
complejos de resolver), planificacin
en red, economtricos (predecir una variable en funcin de otra),
series de tiempo (modelos que
indican qu hacer en base a datos pasados).
Los problemas pueden ser modelados en ms de una forma. Es
interesante observar qu tipo
de modelacin es ms eficiente (tiempo, resultado, memoria).
Cuando se plantea modelar un sistema existen muchos conceptos
errados al respecto. Hay
quienes se niegan a su utilidad argumentando que hay muchas
hiptesis cuestionables como que
hay factores difciles de cuantificar, o bien, que siempre los
datos carecen de precisin. Es clave ver
si el resultado es sensible o no respecto a dicha hiptesis.
En otro extremo hay quienes profieren una fe metafsica a los
modelos matemticos para la toma
de decisiones (y an ms si provienen de un computador).
Obviamente la calidad de la solucin
1 IO: Ciencia de la toma de decisiones, o, la aplicacin de
mtodos cientficos a la administracin y gestin de
organizaciones.
-
4 CHAPTER 1. INTRODUCCIN
depender de la precisin de la estructura y de los datos del
modelo.
Hay que considerar que la fe sin crtica a un modelo es
obviamente peligrosa. No se recomienda
en absoluto aceptar la primera respuesta que un modelo matemtico
produce sin un anlisis y
cuestionamiento posterior profundo. Normalmente un modelo ser
una herramienta dentro de un
conjunto, a la hora de tomar una decisin.
La respuesta de un modelo deber enfrentarse a un cuidadoso
examen, y si sta es inaceptable,
deber comprenderse el por qu y probablemente incorporarse a un
modelo modificado. Si la
respuesta es aceptable, puede ser prudente mantenerlo como una
opcin. Por medio de un sucesivo
cuestionamiento de las respuestas y alternando el modelo, es
posible clarificar las opciones factibles
y comprender mejor lo que es posible.
1.4 Modelos de Programacin Matemtica
En muchas ocasiones uno enfrenta problemas en que es necesario
determinar la mejor opcin dentro
de un conjunto de alternativas disponibles. A esta accin se le
denomina Optimizar. Dentro
del proceso de optimizar existen algunos mtodos que son de mucha
utilidad, los mtodos de
Programacin Matemtica, que se basan en la creacin de un modelo
que represente el sistema
de inters para luego trabajar en torno a esta reduccin o
caricatura de la realidad, y as facilitar
la toma de decisin.
A los estudiantes de ingeniera la palabra programar seguramente
les evoca largas horas frente
al computador diseando un software. Sin embargo en Programacin
Matemtica (PM) la palabra
se usa con el significado de planificar. De hecho, PM en su
esencia no tiene nada que ver con
computadores. Lo que sucede posteriormente, es que los problemas
de PM son tan grandes que
requieren apoyo computacional para su resolucin.
La caracterstica comn de todos los problemas de PM es que
pretenden optimizar algo (min-
imizar o maximizar). Lo que se pretende optimizar se le denomina
funcin objetivo. Cuando
uno observa que se requiere optimizar considerando ms de un
objetivo, tenemos una funcin
multi-objetivo, o con objetivos difusos. En ese caso existen al
menos dos alternativas para abor-
dar el problema: priorizar o ponderar. Priorizar se refiere a
resolver mltiples problemas en forma
secuencial de acuerdo a un orden (priorizacin) de los objetivos.
Ponderar apunta a la resolucin
conjunta de los objetivos, llevndolos a una unidad comn.
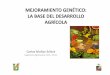
La Figura 1.1 muestra una clasificacin general de los modelos
matemticos. En este texto
trataremos principalmente modelos determinsticos de programacin
no-lineal y de programacin
lineal, tal como se destacan en dicha figura.
El problema general de Programacin Matemtica consiste en
determinar un vector xT =
(x1, ..., xn) que perteneciendo a un conjunto D, subconjunto de
un espacio vectorial de orden n,
-
1.5. CARACTERIZACIN DE PUNTOS EXTREMOS DE UNA FUNCIN 5
Modelos Matemticos
Dinmicos
Estocsticos Determinsticos
Lineales No-Lineales
Continuos Discretos
Estticos
Figure 1.1: Clasificacin de Modelos Matemticos
maximiza (o minimiza) una funcin objetivo f(x1, ..., xn ). Esto
es,
P ) max f(xT ) (1.1)
s.a. xT D,
donde el dominio o set de oportunidades D estar formado por los
siguientes tipos de restric-
ciones: (i) restricciones funcionales
hi(xT ) = 0 con i = 1, ...,m
gj(xT ) 0 con j = 1, ..., s
y (ii) restricciones de conjuntos
x : En.
A la funcin objetivo f(xT ) tambin se le denomina funcin
econmica o de utilidad (costos).
Cabe mencionar que maximizar una funcin equivale a minimizar
dicha funcin, pero con signo
contrario. Por otra parte, en Programacin Lineal, f(x) y las
restricciones h(x) y g(x), son lineales.
En esta seccin se entregan conceptos matemticos bsicos para la
solucin de problemas de
programacin matemtica. En particular, se caracterizan las
soluciones ptimas de un problema y
se discute en qu casos es posible garantizar la existencia de
una solucin ptima. Ms adelante se
introduce el concepto de modelos equivalentes, esto es, modelos
cuya solucin ptima es necesaria-
mente equivalente. Por ltimo, se introduce la convexidad en
conjuntos y funciones, pues sta ser
de gran ayuda para decidir si un ptimo local es solucin al
problema.
1.5 Caracterizacin de puntos extremos de una funcin
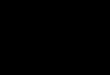
Definicin 1 Un punto extremo de una funcin definida sobre un
dominio D puede ser local o
global, estricto o no estricto, segn se define a continuacin (la
Figura 1.2 muestra grficamente
cada una de estos puntos):
x es mximo global si x es punto factible y si f(x) f(x) x D.
-
6 CHAPTER 1. INTRODUCCIN
x es mximo global estricto si x es punto factible y si f(x) >
f(x) x D \ {x} .x es mximo local si x es punto factible y si f(x)
f(x)x Vecindad de x y x D.x es mximo local estricto si x es punto
factible y si f(x) > f(x) x Vecindad de x y x
D \ {x} .
Max. localno estricto
Min. localestricto
Max. globalestricto
Max. globalde borde
Min. globalde borde
(a) (b)
Figure 1.2: Soluciones locales vs. globales
1.6 Existencia de solucin ptima
Definicin 2 Todo punto x D define una solucin factible o
realizable de P ).
Definicin 3 Un punto factible x define una solucin ptima del
problema de optimizacin minxD
f(x)
ssi f(x) f(x) x D y x D.
Nota: En el caso particular en queD = Rn, se dice que el
problema es no-restringido o irrestricto.
Definicin 4 En un problema de maximizacin, v define el valor
ptimo de P ) si: v = sup(f(x)),
x D. (sup: supremo, cota superior de la funcin sobre el
dominio). En particular, si x es solucinptima de P ) = v = f(x).
Anlogamente para un problema de minimizacin, v = inf(f(x)),x D.
(inf: nfimo, cota inferior de la funcin sobre el dominio).
Nota: No todos los problemas tienen solucin ptima. Podemos
pensar en cuatro familias de
problemas que podran carecer (o carecen) de ella:
a) Problemas cuyo conjunto de restricciones define un dominio de
puntos factibles vaco.
b) Problemas que contemplan alguna restriccin de desigualdad
estricta, es decir que define
una regin que no incluye a su borde. Si en este caso la funcin
objetivo mejora en cuanto ms se
acerque al borde, se estar en una situacin en que la solucin
ptima no se podr identificar.
c) Problemas que contemplan un dominio no acotado, es decir que
incluye puntos cuyas variables
toman valores tan grandes (en valor absoluto) como sea
necesario. Si en este caso la funcin objetivo
-
1.6. EXISTENCIA DE SOLUCIN PTIMA 7
mejora en cuanto ms se acerque a estos puntos de valor absoluto
ilimitado, entonces la solucin
ptima no se podr identificar.
d) Problemas con una funcin objetivo discontinua sobre el
dominio factible. Si en este caso la
funcin objetivo evaluada en el punto de discontinuidad no es
ptima, pero sta mejora en cuanto
ms se acerque al punto de discontinuidad desde alguna direccin,
entonces la solucin ptima no
se podr identificar.
Evidentemente, no todos los problemas con dominio no acotado
carecen de solucin. Tampoco
todos los problemas con restricciones de desigualdad estricta o
todos los con funcin objetivo
discontinua. Sin embargo, en presencia de estos eventos, la
solucin ptima no est garantizada.
Estas observaciones nos conducen naturalmente al siguiente
teorema de existencia de solucin
ptima.
Teorema 1 (Existencia de soluciones ptimas) Consideremos el
siguiente problema de optimizacin
P ) Min f(x)
x D
Si f(x) es continua sobre D, con D cerrado y no vaco sobre Rn,
entonces bajo la hiptesis:
H) f(x) + si ||x|| +, x D (1.2)
P ) admite al menos una solucin ptima.
x
)(xf
+
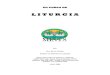
Figure 1.3: Ejemplo de Teorema de Existencia
Nota: Un problema P ) puede tener valor ptimo finito y, sin
embargo, no admitir solucin
ptima. Para ilustrar esto veamos el siguiente ejemplo:
P ) minx0
ex
-
8 CHAPTER 1. INTRODUCCIN
donde v = v(P ) = 0. x 0 / ex = 0? No! Por lo tanto P ) no tiene
solucin, aunque v R (ver
e-x
x x
(a) (b)
1
ex
Figure 1.4: Ejemplos de valores y soluciones ptimas
Figura 1.4a).
Se podra pensar que no existe solucin ptima porque D es no
acotado. Sin embargo, muchos
problemas no acotados admiten solucin ptima. Basta
considerar,
P ) minx0
ex,
en que v(P ) = 1 y x = 0 es la solucin ptima (ver Figura
1.4b).
Nota: Un conjunto es cerrado si contiene a todos los puntos
frontera. El caso de D = R es
cerrado, ya que el conjunto de los puntos frontera es vaco, y
todo conjunto contiene al conjunto
vaco. Como ejemplo de un conjunto no cerrado considere x > 0
que no contiene a su frontera
(x = 0).
Corolario 2 (Bolzano-Weierstrass) Si f es continua, sobre un
dominio no vaco, cerrado y aco-
tado, entonces el problema necesariamente tendr solucin ptima,
ya que la imagen de una funcin
continua sobre un set compacto, es tambin compacta (cerrada y
acotada).
Demostracin. D es acotado ninguna sucesin de puntos {xk D}k0 tal
que:
||xk|| +xk Dk
Luego, la hiptesis H) en (1.2) se cumple por vacuidad en este
caso.
Nota: Es importante notar que estos teoremas identifican
condiciones suficientes para existencia
de optimalidad, pero no condiciones necesarias. As, muchos
problemas que no satisfacen las
condiciones identificadas en el Teorema 1 o en el Corolario 2
tienen solucin ptima.
-
1.7. PROBLEMAS EQUIVALENTES 9
1.7 Problemas Equivalentes
Un problema se puede modelar de varias formas diferentes. En
programacin matemtica se denom-
inan problemas equivalentes a problemas que garantizan el mismo
conjunto de soluciones ptimas.
Evidentemente, para un mismo problema, se busca aquel modelo que
facilita su resolucin.
Considere el problema de localizar una estacin de bomberos en
una ciudad con el siguiente
criterio: que el tiempo mximo de respuesta de la bomba a eventos
en cinco edificios de asistencia
masiva sea lo ms breve posible. En este caso para cada punto
posible de instalar la bomba se evala
el tiempo de respuesta a cada uno de los cinco edificios; el
mayor de estos cuatro valores representa
la funcin objetivo evaluada en el punto. Es interesante notar
que en este caso la funcin objetivo
es minimizar el valor maximo entre otras cinco funciones, es
decir si denominamos la posicin de
la bomba x, entonces la funcin objetivo es:
Min (max {d1(x), d2(x), d3(x), d4(x), d5(x)}).
Una funcin objetivo como esta presenta serios problemas pues es
difcil de tratar algebraica-
mente y presenta discontinuidades en su derivada. As, sera
deseable poder modelar este problema
mediante un modelo equivalente que no presente estas
dificultades.
A continuacin se presentan siete equivalencias que pueden
facilitar la modelacin de muchos
problemas, entre ellos el problema de la localizacin de la
estacin de bomberos.
1.7.1 Equivalencia I
P ) Max f(x) P ) Min (f(x))x D. x D.
x es solucin ptima de P ), con valor ptimo v, si y slo si x es
solucin ptima de P ), con
v(P ) = v.
)(xf
)(xf
D
)(xf
)(xf
D
Figure 1.5: Equivalencia I
-
10 CHAPTER 1. INTRODUCCIN
Ejemplo 1 Algunos ejemplos de esta equivalencia son:
Maximizar utilidad = Minimizar prdida.
Maximizar probabilidad de sano = Minimizar probabilidad de
enfermo.
Por lo tanto, dado un problema de maximizacin, procedemos a
cambiar el signo de la funcin
de costo, para luego resolver el problema de minimizacin
equivalente. Conocida la solucin ptima
x y el valor ptimo v(P ), la solucin ptima de P ) es x y el
valor ptimo v(P ) = v(P ).
1.7.2 Equivalencia II
P ) Min f(x)
x D Rn
Equivalente a,
P ) Min
f(x) x D Rn
R
P ) Min
f(x) =
x D Rn
R
Considerando el problema P ) o P ), el nuevo dominio ser: D = DR
Rn+1, donde x es solucinptima de P ) con valor ptimo v = v(P ), si
y slo si (x, ) es solucin ptima de P ) con valor
ptimo v.
Comprobaremos esta equivalencia por contradiccin. Supongamos que
el problema P ) tiene
solucin ptima x0 y definimos f(x0) = 0 . Por una parte el
problema P ) oP ) no puede tener
valor ptimo 1 > 0 pues el punto (x0, 0) es factible para el
problema y evaluado en la funcin
objetivo es mejor que 1 . Por otra parte, el problema P ) oP )
no puede tener valor ptimo 1 < 0
pues entonces existira un punto x1 en D tal que f(x1) 1 en cuyo
caso la solucin ptima a P )sera x1 y no x0.
Es importante destacar que en el nuevo problema el objetivo es
encontrar un lo ms pequeo
posible tal que exista un x que satisfaga f(x) . As, en la
Figura 1.6 se observa que cumplecon ser el ptimo al problema pues
existe un x D tal que f(x) y para todo valor de menor a no existe
un x en D tal que f(x) .
-
1.7. PROBLEMAS EQUIVALENTES 11
D
)(xf
),( x)()( Pvxf =
D
)(xf
),( x)()( Pvxf =
Figure 1.6: Equivalencia II
Ejemplo 2 En un callejn de 100 metros de largo hay un prfugo que
necesita ubicarse en el lugar
que tenga menos luz. En el callejn hay 4 focos con diferentes
caractersticas (altura, potencia,
posicin). Suponga que la intensidad de luz que llega al prfugo
es slamente la del foco que
alumbra ms en dicho punto y que para estos efectos los postes
(si los hubiera) se pueden considerar
transparentes (ver Figura 1.7). Suponga que la intensidad de luz
de cada foco se puede considerar
inversamente proporcional a la distancia entre el foco y el
prfugo y directamente proporcional a la
potencia del foco. De esta forma, al prfugo le interesar pararse
en el lugar que haya menos luz,
F1
F2
F3
F4
F1
F2
F3
F4
Figure 1.7: Ejemplo de Equivalencia II
es decir, su funcin objetivo ser:
Min (max {f1, f2, f3, f4})
donde
fi =ki
h2i + (xi x)2.
0 x 100
en que ki, xi y hi corresponden a la potencia, ubicacin y altura
respectivamente de cada foco. La
-
12 CHAPTER 1. INTRODUCCIN
nica variable del problema es la ubicacin del prfugo, x.
Al igual que el problema de la estacin de bomberos, este modelo
es complicado de abordar
pues presenta una funcin objetivo cuya derivada no es continua.
As, resulta deseable identificar
un modelo equivalente para este problema que no presente dicha
complicacin. La siguiente seccin
presenta dicha equivalencia.
1.7.3 Equivalencia III
Consideremos un problema como el anterior donde el objetivo
consiste en encontrar un punto tal
que el mximo entre n funciones evaluadas en el punto sea mnimo.
Algebraicamente, esto puede
expresarse del siguiente modo:
P ) MinxD( maxi=1,...,n
fi(x))
Grficamente, el problema se ilustra en la Figura 1.8, en que las
funciones fi(x) se dibujan con
lneas tenues mientras la funcin objetivo se ilustra con una lnea
gruesa. Es importante destacar
que esta ltima funcin no gozar necesariamente de una derivada
continua (e.g., en los puntos A
y B de la figura 1.8). As, estamos minimizando una funcin no
diferenciable.
A
B
1f
2f
3f
A
B
1f 1f
2f
3f
Figure 1.8: Equivalencia III
Sin embargo, de acuerdo a la equivalencia II, el problema P )
puede convertirse en el siguiente
problema equivalente:
P ) Min
maxi=1,...,n
fi(x) x D R
-
1.7. PROBLEMAS EQUIVALENTES 13
Naturalmente la nueva desigualdad puede expresarse como n
desigualdades individuales:
P ) Min
fi(x) i = 1, ..., nx D R
Este ltimo problema contempla slo funciones diferenciables.
Consideremos el siguiente ejemplo cuya funcin objetivo es no
lineal y cuya derivada no es
continua.
P ) Max (min
{7x1 + 6x2 + 5x3
4,5x1 + 9x2 + 4x3
3
})
s.a 8x1 + 5x2 + 3x3 1006x1 + 9x2 + 8x3 200
x1, x2, x3 0
A continuacin identificaremos un problema equivalente cuyas
funciones tengan derivadas continuas.
De la regla I), P ) es equivalente a:
P ) minxD
(min {f1(x), f2(x)})
Es fcil notar que: min {f1(x), f2(x)} = max {f1(x),f2(x)} , por
lo tanto P ) es equivalente a
P )min
xD(max {f1(x),f2(x)})
de la regla III P ) es equivalente aP )min
s.a. f1(x) f2(x)
x D R.
-
14 CHAPTER 1. INTRODUCCIN
o equivalentemente:
P )max
s.a. f1(x) f2(x)x D R.
Y este problema es derivable en el espacio D R. Es decir,
P ) max( mini=1,...,n
{fi(x)})s.a. x D
es equivalente a
P )max
s.a. fi(x) i = 1, ..., nx D R.
Como se observa, este problema lineal es equivalente al problema
original. Estas equivalencias
suelen resultar muy tiles en presencia de mdulos de funciones en
la funcin objetivo. Por ejemplo:
P )min |3x 2|s.a. 1 x 2
x R
En este caso vemos que la funcin objetivo no es derivable en x =
2/3 (ver Figura 1.9).
Ocupando la regla II vemos que P ) es equivalente a:
P ) min
s.a |3x 2| (Restriccin no-lineal)1 x 2x R R
-
1.7. PROBLEMAS EQUIVALENTES 15
22-1 22-1
Figure 1.9: Ejemplo de minimizacin del mdulo
Pero tambin P ) es equivalente a:
P ) min
s.a. 3x 2 (3x 2)
1 x 2x R R
Ahora todas las funciones que intervienen son derivables (y en
este caso lineales). Es importante
notar que en esta formulacin se utiliz la equivalencia |3x2| 3x2
y (3x2) .Esta equivalencia es posible ya que la expresin |3x 2| es
satisfecha por un conjunto convexode puntos (x, ). Este conjunto
queda bien recogido por las dos restricciones equivalentes. Sin
embargo una expresin como |f(x)| ( 0) no tiene un conjunto de
restricciones diferenciablesequivalente ya que el conjunto de
puntos (x, ) que la satisface no es convexo. Dicha expresin ser
equivalente al conjunto de puntos (x, ) tal que f(x) o bien f(x)
En el ejemplo anterior se puede ver que en el ptimo, |3x 2| = 3x 2
= o bien
3x 2 = ; esta relacin puede representarse mediante (3x 2 )(3x 2
+ ) = 0.Por lo tanto, P ) tambin es equivalente a:
P ) min
s.a. (3x 2 )(3x 2 + ) = 01 x 2x R R
En este caso, como el problema P ) es lineal, lo preferimos a
este ltimo problema.
-
16 CHAPTER 1. INTRODUCCIN
Es importante notar que aunque 1 x 2 est dems en este caso,
muchas veces no esrecomendable eliminar (o relajar) restricciones
reales de un problema an cuando se sepa que
la solucin ptima del problema permanecera inalterable (a menos
que la relajacin simplifique
considerablemente la resolucin del problema). Esto se debe a que
a veces falla la intuicin del
modelador y porque el modelo puede ser usado ms adelante con
otros parmetros que activen la
restriccin relajada.
En trminos generales, los siguientes modelos resultan
equivalentes:
P ) minxD
|f(x)|
P ) min
f(x) f(x)
x R R
P ) min
(f(x) )(f(x) + ) = 0x R R
Al realizar estas equivalencias, el lector debe cuidarse de no
incurrir en equivalencias errneas. Por
ejemplo:
P ) max( maxi=1,...,n
{fi(x)})s.a. x D
no es equivalente a
P )max
s.a. fi(x) i = 1, ..., nx D R.
-
1.7. PROBLEMAS EQUIVALENTES 17
pues todo lo que se puede decir es que P ) es equivalente a
P )max
s.a. maxi=1,...,n
{fi(x)}x D R.
Sin embargo, que sea inferior al mximo de un conjunto de
funciones no es equivalente a que
sea inferior a cada una de ellas (equivaldra a ser inferior al
mnimo de ellas). Lo que se requerira
es exigir que sea inferior a al menos una de las funciones, es
decir f1(x) f2(x) .... fn(x). En cambio al exigir fi(x) i = 1, ...,
n se est exigiendo f1(x) y f2(x) y.... y fn(x). Incorporar las
relaciones lgicas asociadas al operador tpicamente requierende
variables binarias asociadas a cada relacin. Estas variables
binarias no son continuas por lo que
tampoco son diferenciables. As, no existe un modelo equivalente
diferenciable a P ) en este caso.
Por ejemplo, consideremos el siguiente problema
P )max |3x 2|s.a. 1 x 2
x R
La solucin ptima a este problema ser x = 1 con un valor ptimo v
= 5. Podemos ver que elsiguiente modelo:
P )max
s.a. 3x 2 (3x 2)1 x 2x R
no es equivalente pues la solucin x = 1, = 5 no es factible, ya
que no satisface la primerarestriccin.
Considere el siguiente problema:
P ) min z = (max {|x1|, |x2|})s.a. x1 + 2x2 1
x1, x2 0
-
18 CHAPTER 1. INTRODUCCIN
1
1/2
1
D
1x
2x
1
1/2
1
D
1x
2x
Figure 1.10: Ejemplo equivalencia III
Aplicando la regla III, P ) es equivalente a:
P ) min
x1 x1 x2
x2 x1 + 2x2 1
x1, x2 0(x1, x2) R2
R
Una ventaja de los problemas bidimensionales como el anterior es
que pueden resolverse medi-
ante curvas de nivel. En este procedimiento se dibuja en el
plano R2 un conjunto de curvas tal que
cada una de ellas represente el lugar geomtrico de todos los
puntos de R2 que reemplazados en
la funcin objetivo den el mismo valor o cota. A continuacin se
debe graficar en el mismo plano
los puntos que satisfacen las restricciones del dominio. As, es
posible identificar visualmente la
solucin ptima al problema. Por ejemplo, en la Figura 1.10
podemos ver el dominio del problema
P ), y la Figura 1.11 ilustra el dominio al agregar las curvas
de nivel.
En este caso, las curvas de nivel permiten observar que la
funcin objetivo corresponde a una
pirmide invertida de base cuadrada en que las aristas de la base
son paralelas a los ejes cartesianos.
El problema P ) busca el punto del dominio que pertenezca a la
curva de nivel de mnima cota (ver
Figura 1.11).
La figura permite identificar que en el ptimo x1 = x2, y como
x
1 + 2x
2 = 1, entonces x
1 =
13
y x2 =13 . Por lo tanto v(P ) =
13 .
-
1.7. PROBLEMAS EQUIVALENTES 19
1
-1
1-1 1x
2x
Z=1
Z=1/2
D
Figure 1.11: Curvas de nivel
1.7.4 Equivalencia IV
Considere el siguiente problema:
P ) minr
i=1
fi(x )
x D Rn
Este problema puede expresarse en forma equivalente como:
P ) minr
i=1
i
fi(x ) i; i = 1, ..., rx D Rr
Esta equivalencia puede demostrarse por contradiccin al igual
que la equivalencia II. Se deja al
lector como ejercicio.
Esta equivalencia es de especial inters en casos en que algunas
funciones fi(x) son no diferen-
ciables y al pasarlas al dominio permiten encontrar una
equivalencia que s lo sea. Por ejemplo:
P ) min(|x1|+ |x2|)s.a. x1 + 2x2 1
-
20 CHAPTER 1. INTRODUCCIN
P ) min1 + 2
s.a. |x1| 1|x2| 2
x1 + 2x2 1
Lo que tambin equivale a: (Problema Lineal Equivalente)
P ) min1 + 2
s.a. x1 1x1 1x2 2
x2 2x1 + 2x2 1
1, 2 R
En trminos generales se puede decir que:
P ) minr
i=1
|fi(x)|
s.a. x D Rn
P ) minr
i=1
i
fi(x) i; i = 1, ..., rfi(x) i; i = 1, ..., r
x D Rr
Ejemplo: son los siguientes problemas equivalentes?:
P ) minx 2s.a x 0
P ) min (x 2)2
s.a x 0
Claramente no lo es porque la funcin g(x) = x2 es estrictamente
creciente sobre los nmeros
-
1.7. PROBLEMAS EQUIVALENTES 21
no negativos. Sin embargo, aqu se aplica sobre una funcin que
puede arrojar nmeros negativos
(e.g. si x = 0, entonces f(x) = 2). De hecho la solucin ptima al
primer problema es x = 0,mientras el del segundo es x = 2.
1.7.5 Equivalencia V
El problema de minimizacin MinxDf(x) es equivalente al problema
MinxDg(f(x)), donde lafuncin g : f(D) R R es estrictamente
creciente sobre f(D) = {y R / x D : y = f(x)} ,por lo que la
solucin ptima ser la misma en ambos casos, pero no as los valores
ptimos. Para
comprobar esta equivalencia, considere a x como el ptimo del
problema original. Esto significa quef(x) f(x) x D. Como g(x) es
estrictamente creciente, si x1 x2 entonces g(x1)
g(x2).As,necesariamente g(f(x)) g(f(x)) x D y por lo tanto ambos
problemas arrojarn la mismasolucin ptima. Por ejemplo, al cambiar
la escala de unidades de la funcin objetivo de dlares a
pesos (US$ $), se est aplicando una funcin g(x) lineal y
creciente sobre todo el dominio porlo que la solucin ptima al
problema es la misma independiente de las unidades.
Ejemplo 3 Determinar el punto ms cercano al origen (0,0) que
satisfaga 2x1 + x2 2.
En este caso la funcin de costos serax21 + x
22, y el dominio D = {(x1, x2)/2x1 + x2 2} .
La funcin raz cuadrada suele presentar complicaciones pues no es
diferenciable en cero. Por lo
tanto, resulta conveniente modificar la funcin objetivo con el
fin de eliminar la raz.
Tomemos g(y) = y2. Esta funcin es estrictamente creciente sobre
el recorrido de la funcin
objetivo original, esto es, los nmeros no negativos R+, ya que
f(x) 0 x D.Por lo tanto, los siguientes problemas son
equivalentes:
P ) minx21 + x
22
s.a 2x1 + x2 2
P ) min x21 + x22
s.a 2x1 + x2 2
y este ltimo problema presenta la ventaja que su funcin
objetivo: f(x1, x2) = x21 +x22 es diferen-
ciable sobre todo R2.
Nota: Si el problema P ) est bien formulado (i.e. el argumento
de la raz sea no negativo para
todo x D) se puede siempre prescindir de la raiz.
P ) minxD
r(x)
con r(x) 0 x D
P ) minxD
r(x)
-
22 CHAPTER 1. INTRODUCCIN
En este caso es importante recordar que si x es solucin ptima de
P ) con v(P ) = r(x), entonces
x es solucin ptima de P ) con v(P ) =r(x).
1.7.6 Equivalencia VI
Basndose en las equivalencias anteriores podemos decir que el
problema
P ) minxD
1
f(x)
con f(x) = 0, x Dy f(x) > 0
es equivalente a
P ) maxxD
f(x).
Para probar lo anterior basta con suponer el caso particular en
que g(y) = ln y, estrictamente
creciente y > 0. Aplicando la regla V P ) es equivalente
a:
P ) min
xDln
(1
f(x)
)= min
xD ln f(x)
Finalmente, de la regla I, P ) es equivalente a:P ) max
xDln f(x)
De la regla V, con g(y) = ey,P ) es equivalente a:
P ) max
xDf(x).
Es importante destacar que esta equivalencia ocurre slo si f(x)
es estrictamente positivo para todo
x. Si la funcin puede tomar valores negativos para algunos
puntos del dominio, entonces aplicar
esta equivalencia puede conducir a error.
1.7.7 Equivalencia VII
Aunando las equivalencias anteriores, podemos decir que el
problema
P ) minxD
(g(x) + maxi=1,...,r
{fi(x)})
-
1.8. NOCIONES BSICAS DE CONVEXIDAD 23
Geomtricamente
D convexo D no convexo
Geomtricamente
D convexo D no convexo
Figure 1.12: Conjuntos convexos y no convexos
es equivalente a:
P ) minxD
1 + 2
g(x) 1fi(x) 2 i = 1, ..., r1, 2 R.
1.8 Nociones Bsicas de Convexidad
Los problemas de optimizacin pueden ser sumamente complejos y
contener mltiples soluciones
ptimas locales lo que puede dificultar enormemente su resolucin.
Estas dificultades pueden re-
ducirse si se identifican adecuadamente algunas caractersticas
tanto de la funcin objetivo como
del dominio del problema. En esta seccin se revisan las
caractersticas de los conjuntos convexos,
las funciones convexas y los problemas convexos.
1.8.1 Conjuntos Convexos
Intuitivamente un conjunto se dice convexo si para cualquier par
de puntos en el conjunto, todos
los puntos en la lnea recta que los une tambin pertenecen al
conjunto. Basta que haya un par de
puntos en el dominio que no satisfaga esta condicin para que el
conjunto se diga no convexo. En
la Figura 1.12 se observa un ejemplo de un conjunto convexo y
uno no convexo.Formalmente,
Definicin 5 Un conjunto D Rn se dice convexo si para todo par de
puntos x1 D y x2 D ycada nmero real con 0 1, x = x1 + (1 )x2 D.
Definicin 6 Segmento [x1, x2] = {z Rn/ z = (1 )x1 + x2, [0, 1]}
. Dado lo anterior,un dominio D ser convexo si: x1 y x2 D [x1, x2]
D.
Claim 1 Todos los poliedros definidos por desigualdades lineales
son convexos. Esta demostracin
se deja al lector.
Proposicin 3 El conjunto formado por la interseccin de conjuntos
convexos es convexo (ver
Figura 1.13).
-
24 CHAPTER 1. INTRODUCCIN
Demostracin. Sean A y B conjuntos convexos, y su interseccin
denominmosla C = AB.Se debe demostrar que si x1 y x2 C, entonces
[x1, x2] C. Si x1 y x2 C, entonces x1 y x2 A yx1 y x2 B. Como A y B
son convexos, [x1, x2] A y [x1, x2] B, por lo tanto, [x1, x2] C.
Ces convexo. Ver Figura 1.13.
BBAI
A
Figure 1.13: Interseccin de Conjuntos
1.8.2 Funciones Convexas
En optimizacin, estamos especialmente interesados en identificar
puntos extremos de la funcin
objetivo. Para algunas funciones esto resulta particularmente
sencillo. Desde esta perspectiva, en
la Figura 1.14 se entrega una clasificacin del universo de
funciones. En esta figura se destacan las
funciones convexas, estrictamente convexas y cuasi-convexas que
a continuacin se describen.
Cuasi-Convexas
Convexas
EstrictamenteConvexas
Cuasi-Convexas
Convexas
EstrictamenteConvexas
Figure 1.14: Universo de funciones
Definicin 7 (Funcin convexa) Sea f(x) : D R, con D convexo.
Entonces, f(x) es convexasobre D si:
f((1 )x1 + x2) (1 )f(x1) + f(x2) x1, x2 D, [0, 1] .
En otras palabras, lo que dice la Definicin 7, es que si en
cualquier intervalo [x1, x2] todo punto
del grafo de f(x) est siempre bajo la cuerda que une los puntos
(x1, f (x1)) y (x2, f (x2)), entonces
f(x) es una funcin convexa. La Figura 1.15 lo muestra
grficamente. Es importante notar que
una funcin definida sobre un dominio no convexo no puede ser
convexa.
Qu ocurre con la funcin de la Figura 1.16? El grafo de f(x)
sobre la regin [x1, x2] est por
encima de la cuerda, por lo tanto f(x) no es convexa sobre
D.
-
1.8. NOCIONES BSICAS DE CONVEXIDAD 25
D
f1 x1 + x2x1 x2
fx1
fx2
1 fx1 + fx2
Figure 1.15: Funcin convexa
D
x1 x2x1 x2 x
f(x)
Figure 1.16: Funcin no convexa
Al observar los grficos de funciones convexas y no convexas, se
deduce la siguiente propiedad:
Proposicin 4 Si la funcin f(x) es diferenciable y convexa sobre
D, entonces la tangente en
cualquier punto de f(x) no podr exceder a f(x) para cualquier x
en el dominio (ver Figura 1.17).
Es decir, para que f(x) sea convexa, f(x) f(x) + df(x)dx
(x x),x, x D.
Proposicin 5 La suma de funciones convexas es tambin
convexa.
Demostracin. Sean f1 y f2 las funciones. Sea x1, x2 D, y 0 1,
tal que
f1((1 )x1 + x2) (1 )f1(x1) + f1(x2)f2((1 )x1 + x2) (1 )f2(x1) +
f2(x2).
Sumando obtenemos
f1((1 )x1 + x2) + f2((1 )x1 + x2) (1 )f1(x1) + f1(x2) + (1
)f2(x1) + f2(x2).
Si f1(x) + f2(x) = g(x) entonces g((1 )x1 + x2) (1 )g(x1) +
g(x2). Por lo tanto g(x), esdecir f1(x) + f2(x), es convexa.
-
26 CHAPTER 1. INTRODUCCIN
D
)()()( xxdx
xdfxf +
)(xf
xDD
)()()( xxdx
xdfxf +
)(xf
x
Figure 1.17: Tangente de funcin convexa
R
R
r
x
),( rx
)(xf
R
R
r
x
),( rx
)(xf
Figure 1.18: Epgrafo de la funcin f(x)
Anlogamente, es fcil demostrar que una funcin convexa
multiplicada por cualquier parmetro
positivo sigue siendo convexa.
Definicin 8 (Funcin cncava) Sea f(x) : D R, con D convexo.
Entonces, f(x) es cncavasobre D si:
f((1 )x1 + x2) (1 )f(x1) + f(x2) x1, x2 D, [0, 1] .
As, resulta claro que si f(x) es una funcin convexa, entonces
f(x) ser una funcin cncava.
Proposicin 6 Si D es convexo, f : D R es convexa sobre D si y
solo si el epgrafo de f sobreD, ED(f) = {(x, r) : x D, r f(x)} , es
una parte convexa de Rn R. Ver Figura 1.18.
Proposicin 7 Sean D Rn convexo, y fi(x) i = 1, ..., p convexas
sobre D, entonces f(x) =max {fi(x)} define una funcin convexa sobre
D.
-
1.8. NOCIONES BSICAS DE CONVEXIDAD 27
)( fED
1f
2f
3f
)( fED
1f
2f
3f
Figure 1.19: Interseccin de epgrafos
Demostracin. Dado que la interseccin (cualquiera) de conjuntos
convexos es un conjunto
convexo, podemos decir:
f(x) = maxi=1,...,p
{fi(x)}ED(f) = pi=1ED(fi).
Como cada uno de los epgrafos de las funciones fi(x) es convexo,
su interseccin tambin lo es.
As, ED(f) es convexo, por lo que f(x) es convexa sobre D (ver
Figura 1.19).
Las funciones convexas presentan favorables propiedades al
optimizar. Por ejemplo, un punto
mnimo local es siempre mnimo global. Sin embargo, no
necesariamente este ptimo ser nico.
Por ejemplo, la funcin f(x) en la Figura 1.20 tiene varias
soluciones ptimas.
Conjunto de soluciones ptimas
r
f(x)
Figure 1.20: Ejemplo de mltiples soluciones ptimas
As, surge la necesidad de definir las funciones estrictamente
convexas.
Definicin 9 (Funcin estrictamente convexa) Sea f(x) : D R, con D
convexo. Entonces,f(x) es estrictamente convexa sobre D si:
f((1 )x1 + x2)) < (1 )f(x1) + f(x2) x1, x2 D, [0, 1] .
-
28 CHAPTER 1. INTRODUCCIN
Es decir toda funcin estrictamente convexa es tambin convexa. En
forma anloga se definen
las funciones estrictamente cncavas.
La Figura 1.21a presenta una nueva funcin convexa, pero no
estricta. Cabe mencionar que
toda funcin lineal f(x) = ax+ b es cncava y convexa a la vez,
pero ni estrictamente cncava ni
estrictamente convexa. Por otra parte, la Figura 1.21b muestra
una funcin que no es ni cncava
ni convexa, pero que localmente cerca de x1 es cncava y
localmente cerca de x2 es convexa.
f(x)
x
f(x)
(a) (b)x1 x2
Figure 1.21: Casos especiales de funciones
A continuacin se demostrar que si f(x) es convexa, entonces el
lugar geomtrico de los puntos
que satisfacen f(x) debe constituir un conjunto convexo para
cualquier .
Proposicin 8 Si : D R,D Rn,D convexo, convexa, entonces los
conjuntos de nivelC() = {x D/(x) } son convexos R .
Demostracin. Sean x1, x2 C(), con R fijo, y [0, 1] . Mostremos
que (1 )x1 +x2 C(). Si x1 y x2 C() x1, x2 D, y
(x1) y (x2) . (1.3)
Como D es convexo (1 )x1 + x2 D, [0, 1] y como () es convexa
sobre D, entonces((1)x1+x2) (1)(x1)+(x2). Por lo tanto de (1.3)
tenemos que ((1)x1+x2) (1 )+ = . As, (1 )x1 + x2 C().
Corolario 9 Si el dominio de restriccin est definido como: D =
{x Rn : gi(x) 0, i =1, . . . ,m} con gi : Rn R funciones convexas,
entonces D es una parte convexa de Rn.
Demostracin. Dado que las funciones gi(x) son convexas, las
regiones definidas por las re-
stricciones gi(x) 0 son tambin convexas (conjuntos de nivel). El
dominio D queda definido comola interseccin de las regiones de
puntos definidos por cada una de las m restricciones,
formalmente
D = mi=1C0(gi). Como cada uno de las regiones C0(gi) es convexa
y la interseccin de conjuntosconvexos es convexa, entonces D es
convexo.
Es importante destacar que restricciones del tipo hi(x) = 0, slo
definen regiones convexas si la
funcin es lineal (no basta que hi(x) sea convexa).
-
1.8. NOCIONES BSICAS DE CONVEXIDAD 29
DD
Figure 1.22: Dominio D formado por semi-espacios
Caso particular: Si tenemos restricciones lineales del tipo
gi(x) = aix bi (funciones linealesson cncavas y convexas a la vez),
entonces D es un poliedro convexo (interseccin finita de semi-
espacios, ver Figura 1.22). Las funciones convexas no son las
nicas en satisfacer que el lugar
geomtrico de los puntos que cumplen con f(x) son conjuntos
convexos, para cualquier .Existen muchas funciones que satisfacen
la propiedad sin ser convexas. Al conjunto de funciones
que satisface esta propiedad se le denomina funciones
cuasi-convexas. Alternativamente, estas
funciones pueden describirse del siguente modo:
Definicin 10 (Funcin cuasi-convexa) Si D es una parte convexa de
Rn, una funcin f :
D R se dice cuasi-convexa sobre D si:
f(z) max{f(x), f(y)} x, y D, x = y, z ]x, y[.
Es decir, tomando cualquier par de puntos en el dominio, todos
los puntos en la recta que los
une tendrn una imagen no superior a las imgenes de los dos
puntos. Cuando f(x) es una funcin
cuasi-convexa, sta posee a lo ms un valle, como es el caso de la
funcin cuasi-convexa de la Figura
1.23. Es importante notar que esta funcin no es convexa.
D convexo
x
f(x)
Figure 1.23: Funcin cuasi-convexa
Una caracterstica importante de las funciones cuasi-convexas
radica en que un mnimo local de
estas funciones es siempre tambin su mnimo global. Como se
mencion anteriormente, otra carac-
terstica importante es que para toda funcin f(x) cuasi-convexa
se cumple que el lugar geomtrico
-
30 CHAPTER 1. INTRODUCCIN
de los puntos tal que satisfacen f(x) a conforman necesariamente
un conjunto convexo. As, unconjunto definido por una serie de
restricciones del tipo fi(x) ai en que todas las funciones fi(x)son
cuasi-convexas es un conjunto convexo.
Definicin 11 (problema convexo) El problema de minimizacin
P ) Min f(x)
x D.
se dice convexo, si D es una parte convexa de Rn y f(x) es
convexo sobre D.
Es importante notar que basta una variable discreta que incida
en el conjunto D para que ste
no sea convexo. Por ende los problemas con variables discretas
tpicamente no son convexos.
Proposicin 10 Si P ) es convexo, todo punto mnimo local del
problema es tambin su ptimo
global.
Demostracin. Sea x punto mnimo local de P ). Entonces definamos
un conjunto vecindad de
x que denominaremos B(x, R) en que todos los puntos del conjunto
estn a una distancia menor a R
de x y tal que f(x) f(x) x DB(x, R); de otro modo x no sera
mnimo local. Supongamos quex no es mnimo global. En ese caso
existira un punto z D (z = x) tal que f(z) < f(x).
Definimosahora el conjunto de puntos en la recta entre x y z como:
y() = (1)x+z D [0, 1] .Todos estos puntos pertenecen a D pues x D,
z D y D es convexo.
Entonces
i) debe existir un suficientemente pequeo tal que , y() B(x, R),
y por lo tanto, f(y()) >f(x)
Sin embargo,
ii) f(x) es convexa f(y()) (1 )f(x) + f(z), y como f(z) <
f(x), esto implicara quef(y()) f(x) lo que contradice el punto i)
anterior.
As, se demuestra que x debe ser un punto mnimo global de P
).
Esta propiedad de los problemas convexos es altamente deseable,
pues permite focalizar el
objetivo en encontrar un punto localmente ptimo. Esto se traduce
en que dado un punto candidato
a ptimo global del problema, no importa cuan grande sea el
dominio, nos basta compararlo con
los puntos de su vecindad inmediata para determinar su
optimalidad. Por ltimo,
Proposicin 11 Corolario 12 Si f(x) es estrictamente convexa
sobre D (convexo), entonces
todo punto mnimo local de f(x) es tambin su nico mnimo
global.
-
1.8. NOCIONES BSICAS DE CONVEXIDAD 31
O
1 2 3
O
1 2 3
Figure 1.24: Determinantes menores de una matriz
1.8.3 Criterios prcticos de convexidad de funciones
Sea f(x) = f(x1, x2, ..., xn) continua y dos veces
diferenciable. Su matriz Hessiana ser:
H =
2fx2
1
2fx1x2
... 2f
x1xn2f
x2x12fx2
2
.... . .
2fxnx1
2fx2n
la cual es una matriz simtrica. La Figura 1.24 muestra las
matrices menores de esta matriz, cuyos
determinantes se denominarn i.
Definicin 12 Caracterizacin de la matriz Hessiana
1. Si todos los determinantes de las matrices menores son
estrictamente positivos (i > 0)
H se dir definida positiva. Esto significa que para cualquier
vector d en Rn se cumpleque dTHd > 0.
2. Si todos los determinantes de las matrices menores son no
negativos (i 0) H se dirsemidefinida positiva. Esto significa que
para cualquier vector d en Rn se cumple que dTHd 0.
3. Si los determinantes de las matrices menores impares son
estrictamente negativos y los de
las matrices menores pares estrictamente positivos (1 < 0, 2
> 0, 3 < 0, ...,) H esdefinida negativa. Esto significa que
para cualquier vector d en Rn se cumple que dTHd < 0.
4. Si los determinantes de las matrices menores impares son no
positivos y los de las matrices
menores pares no negativos (1 0, 2 0, 3 0, ...,) H es
semidefinida negativa.Esto significa que para cualquier vector d en
Rn se cumple que dTHd 0.
Sea f() dos veces diferenciable sobre D, con D Rn y convexo.
Entonces f() es convexa sobreD si y solo si D2f(x) = H es
semidefinida positiva x D. Es decir, dTD2f(x)d 0, d Rn,x D.
-
32 CHAPTER 1. INTRODUCCIN
Ejemplo: Sea f(x1, x2) = 2x1 3x2 + x41 + x1x2 + x22. Las
derivadas parciales son:
f
x1= 2 + 4x31 + x2
f
x2= 3 + x1 + 2x2
y las segundas derivadas seran:
2f
x21= 12x21
2f
x1x2= 1
2f
x2x1= 1
2f
x22= 2.
De esta forma, la matriz Hessiana es:
H =
[12x21 1
1 2
].
Los determinantes menores son 1 = 12x21, no negativo para todo
punto del dominio, y 2 =
24x21 1. Pero, 2 0? Slo si x21 124 , es decir, si |x1|
124 .
DD
241
241 1x
2x
Figure 1.25: Dominio de f(x1, x2)
Es importante destacar que f(x) no es convexa sobre toda la
regin achurada en la Figura
1.25, ya que esta regin no es convexa. Asimismo, basta que la
funcin se defina sobre un dominio
convexo que incluya alguna regin no achurada (algn punto en[
124 ,
124
]para que la funcin
no sea convexa pues el Hessiano no sera semidefinido
positivo).
Proposicin 13 Si D es una parte convexa de Rn y D2f(x) es
definida positiva, es decir, dTD2f(x)d >
0, d Rn, d = 0, entonces f(x) es estrictamente convexa sobre
D.En el ejemplo anterior, f() es estrictamente convexa sobre toda
regin convexa contenida en
la regin x1 < 124 o en la regin x1 >124; x2 R. Estas
regiones excluyen explcitamente a los
puntos en que x1 = 124 x1 =124(ver Figura 1.26).
Es importante destacar la causalidad de esta proposicin: si el
Hessiano es definido positivo,
entonces la funcin es estrictamente convexa, pero no al revs. Es
decir, si f(x) es estrictamente
convexa y dos veces diferenciable en una regin, no implica que
D2f(x) sea definida positiva en
la regin. Por ejemplo, si f(x) = x4 que es estrictamente
convexa, D2f(x) = 12x2 no es definida
positiva en x = 0.
-
1.8. NOCIONES BSICAS DE CONVEXIDAD 33
DD
241
241 1x
2x
Figure 1.26: Dominio no convexo de f(x1, x2)
Ejemplo: Considere el siguiente problema de optimizacin:
P ) minx2 + y2 + z2 6000(x+ y + z)s.a x+ 2y + 4z 4000
x, y, z 0
Tenemos un problema con funcin objetivo cuadrtica, estrictamente
convexa. Veamos su matriz
Hessiana para comprobar esto.
D2f(x, y, z) =
2 0 00 2 00 0 2
= HPor lo tanto,H es definida positiva (constante), y comoD es
un dominio acotado, cerrado y no vaco,
entonces por el Teorema de Existencia tenemos que P ) admite
solucin ptima. Como observamos
que H es definida positiva en cualquier punto, decimos que f()
es estrictamente convexa. Como
adems el dominio es convexo, decimos que el problema admite
solucin ptima nica.
Ejemplo: En una fbrica de chocolates necesitan determinar el
precio de venta ptimo para su
producto de modo de maximizar la utilidad obtenida. El precio no
puede superar el precio de 60c/
de un producto de la competencia. El costo de produccin de la
barra es de 8, 5c/, y la demanda se
representa mediante la funcin f(P ) = 1000P 2, donde P es el
precio de venta expresado en centavos.
De esta forma, la formulacin del modelo sera:
P ) Max(P 8, 5)(1.000P 2
)
s.a 8, 5 P 60
Existe un precio ptimo? S, pues f(P ) es continua sobre el
intervalo [8, 5; 60] , cerrado, acotado
y no vaco (notar que el dominio es convexo). La condicin de
primer orden es:
df(P )
dP=
1
P 3(17.000 1.000P ) = 0
-
34 CHAPTER 1. INTRODUCCIN
de la cual se obtiene P = 17c/ como un punto de derivada nula y
por lo tanto posible precioptimo. A continuacin es necesario
analizar la convexidad de f(P ) para ver si P
correspondeefectivamente a un mximo. Para esto se analiza la
segunda derivada de f(P ),
f(P ) = 2.000P3 51.000P4. (1.4)
Es d2f(P )dP2
0 P [8, 5; 60]? No, si se iguala (1.4) a cero se obtiene que en
P = 25, 5 hay uncambio de signo en la segunda derivada de f(P ),
donde f(P ) < 0 si P < 25, 5 y f(P ) > 0 si
P > 25, 5. Por lo tanto, P ) es no convexo globalmente (ver
Figura 1.27). Por lo anterior se deduce
que en P = 17c/ la funcin es cncava localmente, por lo cual este
precio corresponde a una solucinptima local. Para garantizar que la
solucin es ptima global se puede argumentar que la funcin
es estrictamente decreciente para valores superiores a P = 17c/
por lo que este precio maximiza la
utilidad (v = 29, 4c/).
P25,517,58
Cambio de convexidad
)(Pf
P25,517,58
Cambio de convexidad
)(PfCambio de convexidad
)(Pf
Figure 1.27: Convexidad de la funcin de utilidad f(P )
1.9 Problemas resueltos
Problema 14 (Equivalencia) Considere el siguiente problema y
escriba uno equivalente que sea
diferenciable en el dominio.
P ) Max ln(|x1 + x2 + 1|)1
s.a. x1 + 2x2 5x1, x2 0
Solucin:
Aplicando la regla I de Problemas equivalentes (y reglas bsicas
de logaritmos) transformamos
P en un problema de minimizacin.
P ) Min ln(|x1 + x2 + 1|)x D
-
1.9. PROBLEMAS RESUELTOS 35
Utilizando la equivalencia V aplicamos una funcin g(y) = ey que
es creciente x, para eliminar elln . Luego:
P ) Min |x1 + x2 + 1|x D
Y aplicando la regla II llegamos a
P ) Min
s.a.
x1 + x2 + 1 x1 x2 1
x1 + 2x2 5x1, x2 0
Problema 15 Se quiere instalar una antena de telecomunicaciones,
cuya cobertura incluya a cinco
ciudades aledaas de ubicaciones (xi, yi, zi). Para lograrlo se
debe buscar una posicin en el que la
intensidad de la seal sea lo mayor posible para las ciudades,
sin salir de los ciertos lmites dados
( (x, y, z) D). Adems se sabe que la intensidad en cierta ciudad
es proporcional a la potenciade la antena (k), e inversamente
proporcional a la distancia desde la antena hasta la ciudad. En
qu ubicacin debe instalarse la antena? Modele un problema de
optimizacin que sea diferenciable
en el dominio.
Solucin:
La intensidad de la antena en la ciudad de posicin xi ser
Ii (x ) k|x xi | , es decir, Ii (
x ) k(z zi)2 + (x xi)2 + (y yi)2
As la intensidad de la seal que recibe la ciudad con menor
cobertura ser
I(x ) = mini=1...5
Ii(x )
As el modelo de optimizacin ser
Maxx D I (x ) = Maxx D
[mini=1...5
k(z zi)2 + (x xi)2 + (y yi)2
]
que se puede reescribir como
Maxx D I (x ) = Minx D
[maxi=1...5
k(z zi)2 + (x xi)2 + (y yi)2
]
-
36 CHAPTER 1. INTRODUCCIN
Esto es equivalente al problema
Min
s.a.k
(z zi)2 + (x xi)2 + (y yi)2 , i = 1...5
x D, R
Problema 16 Considere los siguientes problemas de optimizacin, y
escriba uno equivalente que
sea diferenciable en el dominio.
(a) Max [7x3 + x2 + ymin{x2, |x+ y|}]s.a. x3 + 8y2 250, x 0
(b) Maxx0 min{ x2 7x 10 ,min{x3 4x, x4 7}}
Solucin:
(a)
Max [7x3 + x2 + ymin{x2, |x+ y|}] (1.5) Min 7x3 + x2 + ymin{x2,
|x+ y|}
s.a. (x, y) D, conD = {(x, y) / x3 + 8y2 250, x 0} Min 7x3 + x2
+ y+max{x2, |x+ y|}
s.a. (x, y) D Min 1 + 2 + 3
s.a. 7x3 1,x2 + y 2,
max{x2, |x+ y|} 3, (x, y) D, i R i
Min 1 + 2 + 3s.a. 7x3 1, x2 + y 2, x2 y 2,
x2 3, |x+ y| 3, (x, y) D, i Ri Min 1 + 2 + 3
s.a. 7x3 1, x2 + y 2, x2 y 2,x2 3, x+ y 3, (x+ y) 3,(x, y) D, i
R i
-
1.9. PROBLEMAS RESUELTOS 37
(b)
Maxx0 min{ x2 7x 10 ,min{x3 4x, x4 7}}
Minx0 min{ x2 7x 10 ,min{x3 4x, x4 7}}
Minx0 max{x2 7x 10 ,min{x3 4x, x4 7}}
Minx0 max{x2 7x 10 ,max{x3 + 4x,x4 + 7}}
Min s.a.
x2 7x 10 , x3 + 4x ,x4 + 7 , x 0, R
Min s.a. x2 7x 10 , (x2 7x 10) ,
x3 + 4x , x4 + 7 , x 0, R
Problema 17 Considere el siguiente problema de optimizacin, y
escriba uno equivalente que sea
diferenciable en el dominio.
Max 12ln[7x3 +
x2 + ymin{x2, |x+ y|}]s.a. x3 + 8y2 250, x 0
Solucin:
Min ln [7x3 + x2 + ymin{x2, |x+ y|}]1/2s.a. (x, y) D, conD =
{(x, y) / x3 + 8y2 250, x 0}
Utilizando la funcin estrictamente creciente ex se obtiene
Min [7x3 + x2 + y+max{x2, |x+ y|}]1/2s.a. (x, y) D.
Luego utilizando la funcin estrictamente creciente en x 0, x2 se
obtiene
Min [7x3 + x2 + y+max{x2, |x+ y|}]s.a. (x, y) D.
Este problema es el mismo que se describe en la Ecuacin 1.5, y
puede ser resuelto del modo
ah expuesto. Otras funciones estrictamente crecientes de inters:
lnx,1/x,ex, etc.
-
38 CHAPTER 1. INTRODUCCIN
B
A
B
A
Figure 1.28:
Problema 18 (Convexidad (I2103)) Responda:
(a) Qu condiciones debe cumplir un problema para ser denominado
convexo?
(b) Por qu interesa verificar si un problema es convexo?
(c) Si una funcin definida sobre un conjunto A convexo, es
convexa, entonces definida sobre
un conjunto B A tambin lo es?
Solucin:
(a) Debe tener una funcin objetivo convexa sobre un dominio
convexo.
(b) Porque esto garantiza que un ptimo local sea global.
(c) No, ya que B debe ser convexa tambin. Por ejemplo, como
vemos en la figura 1.28,
B A, pero el conjunto A es convexo y B no lo es.
Problema 19 (Convexidad) Comente acerca de la convexidad de la
funcin f(x, y) = 2x2 +
3y2 y3.
Solucin: Para poder entender la convexidad de esta funcin lo
primero que hacemos es
identificar su Hessiano:
f
x= 4x
f
y= 6y 3y2
entonces
H =
[4 0
0 6 6y
]con lo que 1 = 4, 2 = 24 24y, por lo que el Hessiano es semi
definido positivo x R, y 1y por lo tanto la funcin es convexa en
esta regin. Al excluir el borde y = 1 (x R, y < 1) elHessiano se
vuelve definido positivo y la funcin, estrictamente convexa.
Problema 20 (Caracterizacion de soluciones) Encuentre y
caracterice la(s) solucin(es) p-
-
1.9. PROBLEMAS RESUELTOS 39
tima(s) del siguiente problema:
P ) Min f(x, y, z) = x2 + y2 + z2 + xz + yz
(x, y, z) R3
Solucin:
f
x= 2x+ z = 0
f
y= 2y + z = 0
f
z= 2z + x+ y = 0
Por lo tanto hay slo un punto extremo: x = (0, 0, 0)Veamos el
Hessiano:
H =
2 0 10 2 11 1 2
1 = 2 > 0, 2 = 4 > 0, 3 = 4 > 0 = H es positivo
definido. Por lo tanto, f(x, y, z) esestrictamente convexa en todo
el dominio, por lo tanto x = (0, 0, 0) es un mnimo global
estricto.
Problema 21 Considere la funcin
f(x, y) = 2x3 + y + 20.
a)Existe alguna regin en que f(x, y) sea definida positiva?
b)Existe alguna regin en que f(x, y) sea semidefinida
positiva?
c)Existe alguna regin en que f(x, y) sea semidefinida
negativa?
Solucin:
En primer lugar se ve que
f
x= 6x2
f
y= 1 ; H =
[12x 0
0 0
]
a) Se necesita i > 0. En este caso 1 = 12x > 0 x > 0,
pero 2 = 0 por lo que nuncapodr ser definida positiva.
b) Se necesita i 0.Esto se cumple x 0.c) Se necesita 2i1 0 y 2i
0. Esto se cumple x 0.
Problema 22 Qu condiciones deben cumplir los parmetros a y b
para que un punto de la
funcin
f(x, y) = x2 + axy + by2 + x+ y
-
40 CHAPTER 1. INTRODUCCIN
cumpla con las condiciones necesarias, pero no suficientes para
ser mnimo?
Solucin:
i) Condicin necesaria de 1er orden:
f
x= 2x+ ay + 1 0
f
y= ax+ 2by + 1 0
ii) Condicin necesaria de 2do orden:
H =
[2fx2
2fxy
2fyx
2fy2
]=
[2 a
a 2b
]
Para que se cumpla la segunda condicin necesaria, se necesita
que H sea semidefinida positiva
(i 0). En este caso 1 = 2 > 0 y se necesita 2 = 4b a2 0.iii)
Condicin suficiente: H definida positiva (i > 0). En este caso 1
= 2 > 0 y se necesitara
2 = 4b a2 > 0.= Para que se cumpla ii) pero no iii) se
necesita: 4b a2 = 0 4b = a2
Problema 23 Responda las siguientes preguntas:
a) Sean f(x) y g(x) funciones convexas. Es el siguiente problema
de optimizacin convexo?
Min f(x)
s.a. g(x) 0
b) Demuestre que si el dominio de restricciones est definido
como
D = {x Rn : gi 0,i = 1...m}
donde gi : Rn R son funciones convexas, entonces D es una parte
convexa de Rn.c) Comente acerca de la convexidad de la funcin
f(x, y) = 2x2 + 3y2 y3.
d) Qu condiciones debe cumplir un problema para ser denominado
convexo?
e) Si una funcin definida sobre un conjunto A convexo, es
convexa, entonces definida sobre un
conjunto B A tambin lo es?f) Encuentre y caracterice las
soluciones ptimas del siguiente problema
Min f(x, y, z) = x2 + y2 + z2 + xz + yz
s.a.(x, y, z) R3
-
1.9. PROBLEMAS RESUELTOS 41
Solucin:
a) Para que el problema sea convexo, f(x) debe ser convexa y las
restricciones deben formar
un dominio convexo. En este caso, pese a g(x) ser convexa, el
dominio no necesariamente lo es.
Ver Figura 1.29. As el problema de optimizacin no necesariamente
es convexo.
Figure 1.29: Ejemplo de dominio no convexo
b) Si gi(x) es una funcin convexa, entonces el conjunto gi(x) 0
es convexo. Adems se sabeque la interseccin de conjuntos convexos,
es un conjunto convexo = D es convexo.
c) En primer lugar se ve que
f
x= 4x
f
y= 6y 3y2 ; H =
[4 0
0 6 6y
]
En y = 1, el hessiano es semidefinido positivo, por lo que la
funcin es convexa en la regin y 1.Podemos agregar que en la regin y
< 1, la funcin es estrictamente convexa.
d) Para que el problema sea convexo, f(x) debe ser convexa y
estar definida sobre un dominio
D convexo. Para que la funcin objetivo sea convexa se requiere
que
f(x1 + (1 )x2) f(x1) + (1 )f(x2) x1, x2 D; [0, 1]
e) El conjunto B A no necesariamente es convexo, por lo que la
funcin definida en el dominioB no necesariamente sera convexa.
f) En primer lugar buscamos los puntos candidatos a solucin
ptima utilizando las primeras
derivadas, donde se obbtiene
f
x= 2x+ z 0, f
y= 2y + z 0, f
z= 2z + x+ y 0
Despejando este sistema, se encuentra el punto candidato (x, y,
z) = (0, 0, 0). Luego se estudia el
hessiano
H =
2 0 10 2 11 1 2
1 = 2 > 0,2 = 4 > 0,3 = 4 > 0 x, y, z
-
42 CHAPTER 1. INTRODUCCIN
As H es definida positiva en todo el dominio, por lo que la
funcin objetivo es estrictamente
convexa. Esto implica que el punto (0,0,0) es un mnimo
global.
Problema 24 Encuentre y caracterice las soluciones ptimas del
siguiente problema:
f(x, y) = 2x3 + 3x2 12x+ 2y2 8y
Solucin:
Las derivadas parciales son
f
x= 6x2 + 6x 12 0, f
y= 4y 8 0
Resolviendo este sistema, se obtienen los puntos candidatos (1,
2) y (2, 2). Para caracterizar estospuntos se estudia el hessiano,
dado por
H =
[12x+ 6 0
0 4
]
As el primer punto ser un mnimo local estricto, y el segundo no
es caracterizable. Al observar el
hessiano se puede apreciar que la funcin es convexa en la regin
x 1/2.
Problema 25 Encuentre y caracterice las soluciones ptimas de la
funcin
f(x, y) = sinx+ sin y + sin(x+ y)
Solucin:
En primer lugar se buscan los puntos crticos por medio de las
primeras derivadas, que son
f
x= cosx+ cos(x+ y) 0, f
y= cos y + cos(x+ y) 0
Se ve que los puntos crticos son tales que cosx = cos y, es
decir donde x = y + 2n, n=0,1,2...
Despejando para x, se obtiene 2 cos2 x+ cosx 1 = 0 ,
considerando que cos 2x = 2cos2 x 1 yque cos(x 2n) = cosx. As los
puntos crticos sern las soluciones de esta ecuacin cuadrtica,y sern
cosx = 1 y cosx = 1/2. Es decir, x = , /3, 5/3 (Y sus respectivos
perodos 2m,m=0,1,2... ). As los puntos crticos sern
( + 2m, + 2n) , (/3 + 2m,/3 + 2n) , (5/3 + 2m, 5/3 + 2n)
Para determinar la naturaleza de estos puntos, se calcula el
hessiano resultando
H =
[ sinx sin(x+ y) sin(x+ y)
sin(x+ y) sin y sin(x+ y)
]
Luego ste se evala en los puntos crticos:
-
1.9. PROBLEMAS RESUELTOS 43
i)
H =
[0 0
0 0
]Se podra decir que el hessiano es semidefinido positivo y/o
negativo. As, no se puede caracterizar
este punto.
ii)
H =
[3
3
232
3
]= 1 =
3 < 0, 2 = 3 3/4 = 9/4 > 0
As en el segundo punto crtico, el hessiano es definido negativo,
por lo que el punto corresponde a
un mximo local estricto, n,m.iii)
H =
[ 3
32
32
3
]= 1 =
3 > 0, 2 = 3 3/4 = 9/4 > 0
As en el tercer punto crtico, el hessiano es definido positivo,
por lo que el punto corresponde a un
mnimo local estricto, n,m.