Embed Size (px)
Citation preview
www.sekolahrobot.co.id
ARDUINO DRIVER MOTOR
Driver motor merupakan bagian yang berfungsi untuk menggerakkan Motor DC dimana
perubahan arah motor DC tersebut bergantung dari nilai tegangan yang diinputkan pada input
dari driver itu sendiri. Atau bisa didefinisikan sebagai piranti yang bertugas untuk menjalankan
motor baik mengatur arah putaran motor maupun kecepatan putar motor.
Driver motor berfungsi sebagai piranti yang
bertugas untuk menjalankan motor baik
mengatur arah putaran motor maupun
kecepatan putar motor. Macam driver motor
diantaranya adalah :
Ÿ Driver Kontrol Tegangan
Dengan driver motor kontrol tegangan
menggunakan level tegangan secara
langsung untuk mengatur kecepatan dari
putaran motor.
Ÿ Driver PWM
Dengan kontrol PWM kita dapat mengatur
kecepatan motor dengan memberikan
pulsa dengan frekwensi yang tetap ke
motor, sedangkan yang digunakan untuk
mengatur kecepatan adalah duty cycle dari
pulsa yang diberikan.
Driver H-Bridge
Driver type H digunakan untuk mengontrol
putaran motor yang dapat diatur arah -
1. : 3V-5V DCVCC2. GND: ground3. : disambung TX RX pada arduino4. : disambung RX TX pada arduino
1x Arduino Uno1x Breadboard4x Kabel Jumper1X BluetoothLED
putarannya CW (searah jarum jam)
maupun CCW (berlawanan jarum jam).
Driver ini pada dasarnya menggunakan 4
buah transistor untuk switching (saklar)
dari putaran motor dan secara bergantian
untuk membalik polaritas dari motor.
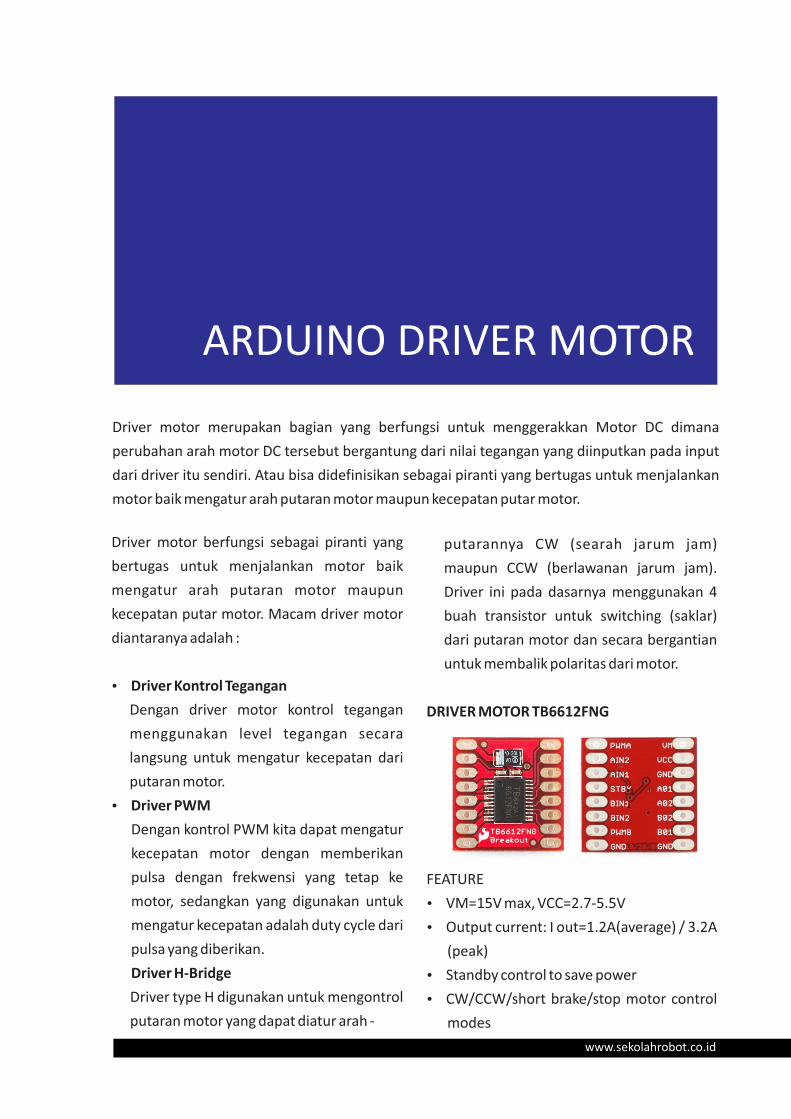
DRIVER MOTOR TB6612FNG
FEATURE
Ÿ VM=15V max, VCC=2.7-5.5V
Ÿ Output current: I out=1.2A(average) / 3.2A
(peak)
Ÿ Standby control to save power
Ÿ CW/CCW/short brake/stop motor control
modes

PERENCANAANDriver ini dapat mengendalikan hingga dua
motor DC pada arus konstan 1.2A (dengan
maksimal 3.2A). Dua sinyal input (IN1 dan IN2)
dapat digunakan untuk mengendalikan motor
di salah satu dari empat mode fungsi - CW,
CCW, short-brake, dan stop.
Dua keluaran motor (A dan B) dapat
dikendalikan secara terpisah, kecepatan
masing-masing motor dikontrol melalui sinyal
input PWM dengan frekuensi hingga 100 kHz.
Pin STBY harus diberi logic high/5V agar motor
keluar dari mode standby.
Logic suplai tegangan (VCC) dapat berada di
kisaran 2.7-5.5VDC, sedangkan suplai motor
(VM) terbatas pada tegangan maksimum
15VDC
Ÿ Pasang pin VCC,VM,STBY driver ke pin 5V Arduino
Ÿ Pasang pin GND driver ke pin gnd ArduinoŸ Pasang pin PWMA driver ke pin 11 ArduinoŸ Pasang pin AIN1 driver ke pin 12 ArduinoŸ Pasang pin AIN2 driver ke pin 13 ArduinoŸ Pasang pin PWMB driver ke pin 10 ArduinoŸ Pasang pin BIN1 driver ke pin 8 ArduinoŸ Pasang pin BIN2 driver ke pin 9 ArduinoŸ Pasang pin A01 dan A02 driver ke pin
Motor DCŸ Pasang pin B01 dan B02 driver ke pin
Motor DC
INSTALL APLIKASI SMARTPHONE
untuk percobaan kali ini menggunakan aplikasi Arduino Bluetooth Controller. Bisa di download di playstore (android).
PERENCANAAN
BAHAN YANG DIBUTUHKAN
Breadboard
Arduino UNO
Jumper M to M
+Driver
Motor DC
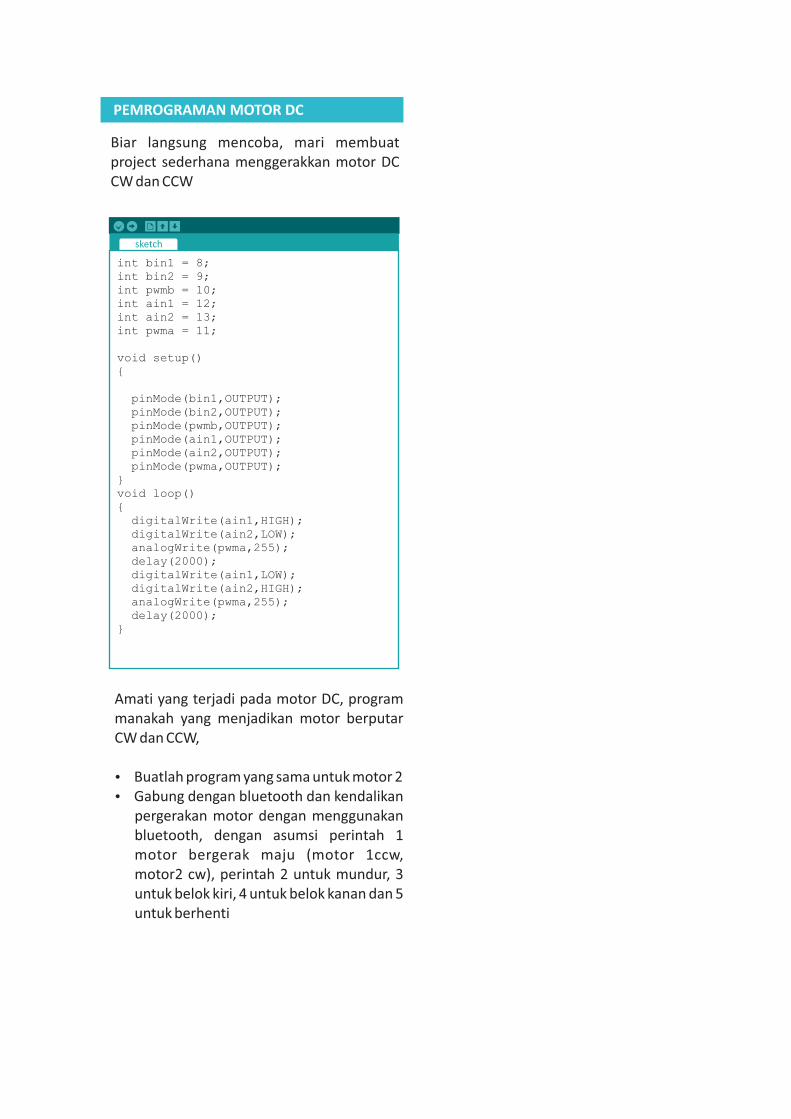
PEMROGRAMAN MOTOR DC
Biar langsung mencoba, mari membuat project sederhana menggerakkan motor DC CW dan CCW
sketch
int bin1 = 8;int bin2 = 9;int pwmb = 10;int ain1 = 12;int ain2 = 13;int pwma = 11;
void setup(){ pinMode(bin1,OUTPUT); pinMode(bin2,OUTPUT); pinMode(pwmb,OUTPUT); pinMode(ain1,OUTPUT); pinMode(ain2,OUTPUT); pinMode(pwma,OUTPUT);}void loop() { digitalWrite(ain1,HIGH); digitalWrite(ain2,LOW); analogWrite(pwma,255); delay(2000); digitalWrite(ain1,LOW); digitalWrite(ain2,HIGH); analogWrite(pwma,255); delay(2000); }
Amati yang terjadi pada motor DC, program manakah yang menjadikan motor berputar CW dan CCW,
Ÿ Buatlah program yang sama untuk motor 2Ÿ Gabung dengan bluetooth dan kendalikan
pergerakan motor dengan menggunakan bluetooth, dengan asumsi perintah 1 motor bergerak maju (motor 1ccw, motor2 cw), perintah 2 untuk mundur, 3 untuk belok kiri, 4 untuk belok kanan dan 5 untuk berhenti
Ÿ Amati apa yang terjadi pada LED
PROJECT