Embed Size (px)
Citation preview

20
BAB 2
MASALAH ORBIT DUA BENDA 2.1. Integral-integral Masalah Dua Benda Dari Bab 1 diketahui bahwa bila hanya ada dua benda bermassa di jagad raya, maka persamaan keseimbangan antara gaya inersial dan gaya gravitasi yang dialami oleh benda yang kurang dominan adalah
rrdt
Vd3µ
−=
(2.1.1) dalam hal ini: V = vektor kecepatan orbit yang selalu menyinggung lintasan orbit, r = vektor radius, dan µ = konstanta gravitasi. V m dV/dt r - µ r r3
M
lintas orbit
Gambar 2.1.1. Keseimbangan inersial dan gravitasi. Persamaan vektor keseimbangan di atas dapat diintegralkan untuk memperoleh parameter-parameter orbit sebagai berikut.

21
2.1.1. Vektor momentum sudut h Vektor momentum sudut adalah perkalian momentum mV dengan radius vektor r. Untuk tiap satuan massa m (benda pengorbit benda utama M), momentum sudut jenis (specific angular momentum) dapat didefinisikan sebagai berikut:
Vrh ×=(2.1.2)
Jika persamaan tersebut didiferensialkan terhadap waktu:
( )
0
0 3
3
=
×−=
⎟⎠⎞
⎜⎝⎛−×+×=
×+×=
×=
rrr
rr
rVV
dtVdrV
dtrd
Vrdtd
dthd
µ
µ
Dengan demikian, integrasi dari dh/dt = 0 menghasilkan
konstanvektor0 =→= hdthd
(2.1.3) Vektor momentum sudut h merupakan vektor konstan, artinya besar dan arahnya di ruang inersial adalah konstan. Karena vektor h tegak lurus bidang yang dibentuk oleh vektor r dan V dan karena arah h selalu konstan, akibatnya bidang yang dibentuk oleh vektor r dan V selalu mempunyai orientasi konstan di ruang inersial. Dengan kata lain, bidang yang dibentuk oleh vektor r dan V merupakan bidang datar dengan arah normal konstan sesuai arah vektor momentum jenis h. Kesimpulan : lintas orbit dua benda terletak pada bidang datar yang tegak lurus vektor h.

22
ZI h = r x V m V r M lintas orbit bidang datar ⊥ h 0 YI XI
Gambar 2.1.2. Bidang lintas orbit ≡ bidang datar tegak lurus vektor momentum sudut h.
Perhatikan bahwa semua lintas orbit dua benda bermassa di jagad raya ini, baik alami maupun buatan, selalu terletak pada bidang datar yang tegak lurus vektor h-nya. Vektor momentum sudut jenis h ini dapat dinyatakan dalam bentuk lain sebagai berikut. Vektor kecepatan orbit V dan posisi r adalah
r
rrirr
iViVV=
+= θθ
(2.1.4) di mana : ir = vektor arah sepanjang radius r, dan iθ = vektor arah normal terhadap r.

23
iθ V Vθ ir Vr r θ lintas orbit dθ/dt
Gambar 2.1.3. Uraian vektor r dan V pada arah radius dan normal. Jelas terlihat bahwa
dtdrV
dtdrVr
θθ == dan
(2.1.5) Substitusi (2.1.4) dan (2.1.5) ke (2.1.2) menghasilkan
h
hr
idtdr
dtdr
dtdr
r
iii
Vrh θ
θ
θ
2
0
00det =
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
=×=
Dengan demikian,
dtdrh
ihh h
θ2=
=
(2.1.6) Bila h = 0 artinya vektor r dan V akan berimpit dan lintas orbit berupa garis lurus.

24
2.1.2. Vektor Eksentrisitas Jika persamaan orbit dua benda (2.1.1) dikalikan secara paska-kali dengan vektor momentum h diperoleh
(2.1.7)
( ) ( ) ( )[ ]rVrVrr
Vrrr
hVdtd
hrr
hdtVd
•−−=××−=×⇔
×−=×
233
3
µµ
µ
Perhatikan bahwa
( )dtdrrrri
dtdririrVr rr ==⎟
⎠⎞
⎜⎝⎛ +•=• && θ
θ
(2.1.8) Substitusi (2.1.8) ke (2.1.7) menghasilkan
( ) ⎟⎠⎞
⎜⎝⎛=⎥⎦
⎤⎢⎣⎡ −=×
rr
dtdr
dtdrVr
rhV
dtd µµ
2
atau
0=⎟⎠⎞
⎜⎝⎛ −×
rrhV
dtd µ
(2.1.9) Jika kuantitas vektor ini diintegralkan akan diperoleh
konstan==−× err
hV µµ
(2.1.10) Vektor e merupakan vektor konstanta. Jadi, besar dan arahnya di ruang inersial adalah konstan. Vektor µe disebut vektor Laplace yang merupakan µ kali suatu besaran yang disebut eksentrisitas lintas orbit e. Oleh sebab itu, e disebut pula vektor eksentrisitas.

25
Yo V V x h µ e -µ r/r V θ -µ r/r µ e V x h Xo lintas orbit -µ r/r V µ e V x h
Gambar 2.1.4. Vektor eksentrisitas µ e. Gambar di atas memperlihatkan bahwa arah dan besar vektor eksentrisitas selalu konstan. Arah e selalu sejajar dengan arah saat V dan r tegak lurus dengan sudut lintas θ = 0 deg. 2.1.3. Parameter Orbit p dan Integral Energi Integral orbit lain yang penting adalah integral energi. Jika vektor eksentrisitas e dikalikan skalar dengan dirinya sendiri, diperoleh
( ) ( ) ( ) 1212 +ו−ו×=•= hVrr
hVhVeeeµµ
(2.1.11)

26
Perhatikan bahwa mengingat vektor V tegak lurus vektor h, maka
( ) ( ) ( ) 22VhhVhVhVhV =×ו=×•× Selanjutnya
2hhVrhVr =•×=ו(2.1.12)
Substitusi (2.1.12) ke (2.1.11) memberikan
⎟⎟⎠
⎞⎜⎜⎝
⎛−=−
µµ
222 21 V
rhe
(2.1.13) Dalam astrodinamika didefinisikan parameter orbit p berikut:
µ
2hp ≡
(2.1.14) Parameter orbit ini mempunyai satuan panjang dan disebut semilatus rectum. Karena ruas kiri (2.1.13) tidak mempunyai satuan, maka suku dalam tanda kurung ruas kanan (2.1.13) harus mempunyai satuan satu per panjang. Selanjutnya, karena e dan h keduanya konstan maka suku dalam tanda kurung tersebut besarnya juga konstan. Dengan demikian dapat didefinisikan kuantitas a dengan dimensi panjang berikut:
122−
⎟⎟⎠
⎞⎜⎜⎝
⎛−≡
µV
ra
(2.1.15)

27
Hubungan di atas dapat ditulis sebagai berikut:
konstan22
1 2 =−=−ar
V µµ
(2.1.16) Persamaan tersebut disebut persamaan kekekalan energi jenis (energi untuk tiap satuan massa m). Dalam hal ini: ½ V2 = energi kinetik untuk tiap satuan massa m -µ/r = energi potensial gravitasi untuk tiap massa m akibat tarikan benda bergravitasi µ. Dengan demikian, dapat didefinisikan besarnya energi jenis total ε :
a2µε −=
(2.1.17) Persamaan di atas dapat dijelaskan secara fisik sebagai berikut:
Jika ε < 0, energi jenis negatif. Ini berarti energi kinetik lebih kecil daripada energi potensial gravitasi. Dengan demikian, berapa pun kecepatan V , satelit tetap akan tertarik kembali oleh medan gravitasi planet penarik. Jadi, lintasan orbit dengan kasus ε < 0 akan membentuk lintas tertutup. Harga panjang konstanta a positif dan merupakan setengah sumbu panjang lintasan orbit tertutup tersebut.
Jika ε = 0, energi jenis nol. Ini berarti energi kinetik sama besar dengan energi potensial gravitasi. Dengan demikian, berapa pun besar medan gravitasi planet penarik, kecepatan satelit dapat mengimbanginya dengan energi kinetiknya sehingga satelit tidak pernah akan kembali tertarik oleh planet tersebut. Perimbangan energi ini menyebabkan pada tempat yang amat jauh dari medan gravitasi, kecepatan satelit mendekati nol. Jadi, lintas orbit

28
dengan ε = 0 akan membentuk lintas terbuka. harga panjang konstanta a menuju tak hingga.
Jika ε > 0, energi jenis positif. Ini berarti energi kinetik lebih besar daripada energi potensial gravitasi. Dengan demikian, kecepatan satelit selalu dapat mengatasi besarnya medan gravitasi planet penarik. Jadi, lintas orbit dengan ε > 0 akan membentuk lintas terbuka dimana satelit akan terus menjauh keluar dari medan gravitasi planet penarik dengan energi konstan. Dalam hal ini harga a negatif dan pada jarak yang amat jauh dari planet penarik kecepatan satelit konstan.
Persamaan (2.1.16) dapat ditulis dalam bentuk yang disebut integral energi atau integral vis-viva berikut:
⎟⎠⎞
⎜⎝⎛ −=
arV 122 µ
(2.1.18) Kata vis-viva berasal dari bahasa Latin : vis mortha = gaya statik (gaya mati) dan viva = gaya dinamik (gaya hidup). Dari (2.1.14) , (2.1.15) dan (2.1.13) dapat diperoleh hubungan antara konstanta e, p dan a berikut:
( )21 eap −=
(2.1.19) Karena p selalu positif, maka e pada persamaan di atas harus selalu lebih kecil dari satu. Khusus untuk e = 1 maka p = 0 (lintas orbit parabolik). Dengan demikian, parameter p selalu positif
bila ε < 0 maka a > 0 dan e < 1 bila ε = 0 maka a → tak hingga dan e ≈1 bila ε > 0 maka a < 0 dan e > 1 (2.1.20)
Akan ditunjukkan bahwa konstanta a merupakan salah satu ukuran geometri lintas orbit pada pasal berikut.

29
2.2. Persamaan Umum Lintas Orbit Jika (2.1.10) dikalikan secara skalar dengan vektor radius r diperoleh:
rh
rhVr
rr
hVr
rrr
rhVre
µ
µ
µ
µµ
−=
−•×=
−ו=
•−•×=•
2
2
atau
rerph•+==
µ
2
(2.2.1) Karena vektor e mempunyai arah yang tetap di ruang inersial, maka arah e ini dapat dijadikan acuan sudut nol antara vektor radius r dan e. Dengan demikian, dapat didefinisikan sudut θ yang merupakan sudut antara vektor r dan e. Jadi,
θcosrere =•
(2.2.2) Substitusi (2.2.2) ke (2.2.1) merupakan pemecahan umum persamaan lintas orbit
θcos1 epr
+=
(2.2.3) Selanjutnya θ disebut anomali benar (true anomaly).

30
r θ e
Gambar 2.2.1. Anomali benar θ Persamaan (2.2.3) melukiskan bentuk irisan kerucut terhadap bidang datar. Irisan kerucut bisa berupa lingkaran, elips, parabola atau hiperbola bergantung kepada sudut kemiringan bidang datar yang mengirisnya, atau dengan kata lain bergantung kepada eksentrisitas e persamaan di atas. Gambar 2.2.2. menunjukkan suatu kerucut dengan penampang lingkaran dengan sudut puncak 2α. Bidang datar A memotong kerucut dengan sudut kemiringan potong δ. Arah kemiringan kerucut dinyatakan sebagai tan α sedangkan arah kemiringan sudut potong bidang datar dengan kerucut dinyatakan sebagai tan δ. α bidang datar A δ kerucut
Gambar 2.2.2. Irisan bidang datar pada kerucut.

31
Dengan demikian, terdapat beberapa kemungkinan: (i) jika (tan α/tan δ) = 0 ; maka δ = 0 deg ; maka bidang A sejajar
bidang dasar kerucut. Irisan berupa lingkaran. Harga e = 0. Pusat : titik potong bidang A dengan sumbu kerucut.
Gambar 2.2.3a. Irisan lingkaran (ii) jika (tan α/ tan δ) < 1 ; maka bidang A mengiris kerucut dengan
sudut δ > α. Irisan berupa elips. Harga e antara 0 dan 1 . Fokus : titik potong bidang A dengan sumbu kerucut merupakan salah satu fokus
α δ F
Gambar 2.2.3b. Irisan elips.

32
(iii) jika (tan α/ tan δ) = 1 ; maka bidang A mengiris kerucut dengan
sudut δ = α. Irisan berupa parabola. Harga e = 1 . Fokus : titik potong bidang A dengan sumbu kerucut.
α δ = α
Gambar 2.2.3c. Irisan parabola (iv) jika (tan α/ tan δ) > 1 maka bidang A mengiris kerucut dengan sudut
δ < α. Irisan berupa hiperbola. Harga e > 1 . Fokus : kedua titik potong sumbu kerucut dengan bidang A.
δ
Gambar 2.2.3d. Irisan hiperbola

33
Dengan demikian, lintas orbit dua benda akan: • selalu terletak pada bidang datar dengan • bentuk lintasan: lingkaran, eliptik, parabolik atau hiperbolik. 2.3. Geometri Lintas Orbit Dua Benda Berikut diberikan parameter geometri lintas orbit dua benda: lingkaran, eliptik, parabolik atau hiperbolik. 2.3.1. Orbit Lingkaran Untuk orbit lingkaran: Jari-jari (radius vektor) akan konstan sebesar r Anomali benar : sudut antara r dan xo adalah θ Persamaan orbit : r = konstan
222 ryx oo =+ e = 0.0
(2.3.1) yo r θ xo
Gambar 2.3.1a. Orbit lingkaran.

34
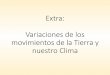
2.3.2. Orbit Eliptik Untuk orbit eliptik beberapa titik penting antara lain: F - fokus utama, letak planet penarik F* - fokus kosong P - titik paling dekat dengan F = pericenter A - titik paling jauh dari F = apocenter B, C - titik semi latus rectum r - radius vektor θ - anomali benar Sumbu xo searah dengan vektor eksentrisitas e. Yo D B r b θ A O P e Xo F* F ra rp a a e C E
Gambar 2.3.1b. Orbit eliptik. Dari (2.2.3) jarak terdekat dengan F yaitu rp adalah
( ) ( ) ( )eareaeea
epr pp
o−=→−=
+−
=+
==
1111
cos1
2
0θθ
(2.3.2)

35
Jarak terjauh dari F yaitu ra adalah
( ) ( ) ( )eareaeea
epr aa
o+=→+=
−−
=+
==
1111
cos1
2
180θθ
(2.3.3) Jarak semi latus rectum
( ) ( )2,
2
27090
, 11cos1
eareape
pr CB
atau
CBo
o−=→−==
+=
=θθ
(2.3.4) Jarak OF
( ) eaOFeaaOF =→−−= 1(2.3.5)
Setengah sumbu pendek
21 eab −=
(2.3.6) Pada tata acuan orbit (xo, yo) persamaan orbit eliptik dinyatakan oleh
( )θθ cos1
1cos1
2
eea
epr
+−
=+
=
(2.3.7) Dari gambar 2.3.1b diperoleh
22
22
cosoo
o
oo
yx
xyxr
+=
+=
θ
(2.3.8)

36
Substitusi (2.3.8) ke (2.3.7) memberikan persamaan orbit eliptik di koordinat kartesian:
( )( ) 11 22
2
2
2=
−+
+
eay
a
eax oo
(2.3.9) 2.3.3.Orbit Parabolik Untuk orbit parabolik : F - fokus, letak planet penarik P - titik pericenter B, C - titik semi latus rectum r - radius vektor θ - anomali benar Yo B r θ e F P Xo C rp
Gambar 2.3.1c. Orbit parabolik.

37
Jarak terdekat dengan F yaitu rp adalah
2cos1 0
prpr ppo
=→+
==θθ
(2.3.10) Jarak terjauh dari F yaitu ra adalah
∞→−
=+
==
aaa rppro 11cos1 180θθ
(2.3.11) Jarak semi latus rectum
prppr CB
atau
CBo
o =→=+
== ,
27090, cos1 θθ
(2.3.12) Pada tata acuan orbit (xo, yo) persamaan parabola dinyatakan oleh
θcos1+=
pr
Substitusi
22
22
cosyx
xyxr
+=
+=
θ
pada persamaan di atas memberikan
⎟⎠⎞
⎜⎝⎛ −= xppy
222
(2.3.13)

38
2.3.4. Orbit hiperbolik Untuk orbit hiperbolik : F - fokus, letak planet penarik F* - fokus kosong P - titik pericenter B, C - titik semi latus rectum r - radius vektor θ - anomali benar b/a - slope dari asimtot Yo B b D a r θ∞ -b θ P e O Xo F F* -a C -ae
Gambar 2.3.1d. Orbit hiperbolik Jarak terdekat dari planet rp:
( ) ( ) ( )11cos1
1
0
2−−=→−=
+−
==
eareae
ear ppoθ
θ
(2.3.15)

39
Jarak terjauh dari planet ra: karena orbit hiperbolik adalah orbit terbuka, maka jarak terjauh ra dicapai pada titik tak hingga sepanjang asimtot hiperbola tersebut. Jadi, dalam arah θ:. Dalam hal ini, sudut asimtot θ: dicari sebagai berikut: Jadi,
∞∞ θθ aa untukar(2.3.16)
Sudut asimtot θ∞ dicari melalui limit berikut. Dari (2.2.3)
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡−
−= 111cos
2
rea
eθ
Dengan demikian,
( )er
eaer
1111limcos
2−=
⎥⎥⎦
⎤
⎢⎢⎣
⎡−
−∞
=∞a
θ
maka
⎥⎦⎤
⎢⎣⎡−= −
∞ e1cos 1θ
(2.3.17) Sumbu pendek hiperbola b : untuk ∆OPD berlaku:
aOP
eae
aaODODa
−=
−=−
==→=∞
∞ 1coscos
θθ
Jadi,
( ) 1222222 −=→−−=−= eabaeaOPODb(2.3.18)

40
Persamaan orbit dalam koordinat (xo, yo) adalah (dengan cara sama seperti sebelumnya):
( )( ) 1
122
2
2
2=
−−
+
eay
a
eax o
(2.3.19) 2.4. Kecepatan-kecepatan pada Lintas Orbit Kecepatan V pada lintas orbit dapat dicari melalui integral vis-viva (2.1.18) :
⎟⎠⎞
⎜⎝⎛ −=
arV 12µ
(2.4.1) Di sini yang diketahui hanya besar kecepatan V. Arah vektor V selalu menyinggung lintasan orbit. Yo Vθ
V Vr r θ Xo
Gambar 2.4.1. Komponen kecepatan orbit radial dan normal.

41
Jika vektor kecepatan orbit V diuraikan dalam komponen arah vektor radius ir dan arah vektor tegak lurus vektor radius iθ maka
θθ iViVV rr +=(2.4.2)
Dalam hal ini jelas bahwa
dtdrV
trVr
θθ ≡
∂∂
≡
(2.4.3) Kedua komponen kecepatan di atas dapat dinyatakan dalam parameter bentuk orbit e dan a (atau p) sebagai berikut. Dari (2.1.6b) momentum sudut h adalah:
rh
dtdr
dtdrh =→=
θθ2
Dari (1.1.7b) diperoleh
( )θµµθθ cos1 e
pr
p
dtdrV +===
atau
( )( )θµθ cos1
1 2 eea
V +−
=
(2.4.4) Selanjutnya, dari (2.2.3) dan (2.4.3a) diperoleh

42
( )( )
( )( )θµθ
θ
θθ
θ
θθθ
θ
cos11cos1
sin
cos1sin
sincos1
cos1
2
2
eeae
e
dtdr
ee
dtde
ep
ep
dtdVr
+−+
=
⎟⎠⎞
⎜⎝⎛
+=
−+
−=
⎟⎠⎞
⎜⎝⎛+
=
Dengan demikian,
( ) θµ sin1 2 e
eaVr
−=
(2.4.5) 2.4.1. Orbit Lingkaran Yo r θ Xo
Gambar 2.4.1. Orbit lingkaran. Di sini e = 0 dan dari (2.4.4) dan (2.4.5) didapat

43
0
konstan
=
==
rVa
V µθ
(2.4.6) Jadi:
aVVVV r
µθθ ==+= 22
atau dari integral vis-viva
aaaV µµ =⎟
⎠⎞
⎜⎝⎛ −=
12
(2.4.7) Secara umum, untuk orbit lingkaran dengan jari-jari r maka kecepatan V disebut kecepatan sirkuler Vc di mana
rVc
µ≡
(2.4.8) 2.4.2. Orbit Eliptik Yo VB B r Vp θ A O P Xo ra rp Va VC C
Gambar 2.4.2. Orbit eliptik.

44
Dalam hal ini, 0 < e < 1. Kecepatan di pericenter disebut Vp dan kecepatan di apocenter disebut Va. Vp dan Va dapat dicari melalui integral vis-viva (2.4.1) atau (2.4.4). (i) Kecepatan di pericenter Vp
( ) ( ) ⎟⎠
⎞⎜⎝
⎛−+−
=⎟⎠
⎞⎜⎝
⎛ −−
=⎟⎟⎠
⎞⎜⎜⎝
⎛−=
eae
aeaarV
pp 1
1211212 µµµ
Jadi
⎟⎠⎞
⎜⎝⎛
−+
=ee
aVp 1
1µ
(2.4.9) Hal yang sama diperoleh melalui (2.4.4) dengan θ = 0o. Dengan mendefinisikan Vcp sebagai berikut:
( )earV
pcp −
=≡1µµ
(2.4.10) maka kecepatan orbit di pericenter dapat ditulis
eVV cpp += 1(2.4.11)
Di sini Vcp disebut kecepatan orbit di titik P bila orbit berbentuk lingkaran dengan jari-jari rp. (ii) Kecepatan di apocenter Va
( ) ( ) ⎟⎠
⎞⎜⎝
⎛+−−
=⎟⎠
⎞⎜⎝
⎛ −+
=⎟⎟⎠
⎞⎜⎜⎝
⎛−=
eae
aeaarV
aa 1
1211212 µµµ

45
Jadi
⎟⎠⎞
⎜⎝⎛
+−
=ee
aVa 1
1µ
(2.4.12) Hal yang sama diperoleh dengan (2.4.4) bila θ = 180o. Dengan mendefinisikan Vca berikut:
( )earV
aca +
=≡1µµ
(2.4.13) maka kecepatan orbit di apocenter dapat ditulis
eVV caa −= 1(2.4.14)
Di sini Vca disebut kecepatan orbit di titik P bila orbit berbentuk lingkaran dengan jari-jari ra. (iii) Kecepatan di semi latus rectum B Dari integral vis-viva
⎟⎟⎠
⎞⎜⎜⎝
⎛−=
arV
BB
12µ
(2.4.15) di sini
( ) ( )2
90
21
cos11 eare
ear BBo
−=→+−
==θ
θ
(2.4.16) Substitusi (2.4.16) ke (2.4.15) memberikan :

46
⎟⎟⎠
⎞⎜⎜⎝
⎛
−
+= 2
2
11
ee
aVB
µ
(2.4.19) Dengan definisi
( )21 earV
BcB
−=≡
µµ
(2.4.20) maka
21 eVV cBB +=(2.4.21)
Vcb adalah kecepatan orbit di B bila orbit berbentuk lingkaran dengan jari-jari rB. (iv) Kecepatan di semi latus rectum C Dari integral vis-viva
⎟⎟⎠
⎞⎜⎜⎝
⎛−=
arV
CC
12µ
(2.4.22) di sini
( ) ( )2
270
21
cos11 eare
ear CCo
−=→+−
==θ
θ
(2.4.23) Dengan demikian,
21 eVVV cBBC +==(2.4.24)

47
Dari kecepatan-kecepatan Vp, Va, dan Vb = Vc terlihat bahwa karena e < 1 maka
Vp > Vb = Vc > Va(2.4.25)
Dengan kata lain, pada lintas orbit eliptik • kecepatan tertinggi terjadi di pericenter sebesar Vp • kecepatan terendah terjadi di apocenter sebesar Va • lintas orbit dari P ke A adalah lintas perlambatan, dan dari A ke P
adalah lintas percepatan Perhatikan (2.4.11) dan (2.4.14). Di sini
caaca
a
cppcp
p
VVeVV
VVeVV
<→<−=
>→>+=
11
11
(2.4.26) Ketidaksamaan di atas memiliki arti bahwa : Vp > Vcp : kecepatan orbit eliptik di pericenter lebih besar daripada
kecepatan orbit bila orbit berbentuk lingkaran di pericenter tersebut. Artinya jika kecepatan Vp dikurangi sebesar ∆Vp sehingga menjadi Vcp di pericenter maka satelit di titik pericenter tersebut akan berganti dari lintas eliptik menjadi lintas lingkaran dengan jari-jari rp. Demikian pula sebaliknya.
Va < Vca : kecepatan orbit eliptik di apocenter lebih kecil daripada
kecepatan orbit bila orbit berbentuk lingkaran di apocenter tersebut. Artinya jika kecepatan Va ditambah sebesar ∆Va sehingga menjadi Vca di apocenter maka satelit di titik apocenter tersebut akan berganti dari lintas eliptik menjadi lintas lingkaran dengan jari-jari ra. Demikian pula sebaliknya.
Gambar berikut melukiskan penjelasan di atas.

48
∆Vp Vp rp Vcp A P Va
Vca ∆Va ra
Gambar 2.4.3. Kecepatan sirkuler dan eliptik di peri/apo-center. Gambar di atas menunjukkan tiga buah lintas orbit: dua lintas lingkaran dengan jari-jari ra dan rp, dan satu lintas eliptik yang menyinggung kedua orbit lingkaran di P dan A. Gambar tersebut mempunyai arti : (i) Misal mula-mula suatu satelit bergerak menurut orbit lingkaran
dengan jari-jari ra dan kecepatan Vca. Jika di titik A kecepatan satelit dikurangi dengan ∆Vca sehingga menjadi Va, maka satelit akan masuk ke orbit eliptik dengan apocenter ra dan eksentrisitas e. Jika selanjutnya pada titik P kecepatan dikurangi lagi dari Vp menjadi Vcp, maka satelit akan masuk ke orbit lingkaran dengan jari-jari rp dan kecepatan Vcp.
(ii) Misal sekarang satelit berada di orbit lingkaran dengan jari-jari rp dan
kecepatan Vcp. Jika di titik P kecepatan satelit ditambah dengan ∆V sehingga menjadi Vp, maka satelit akan masuk ke orbit eliptik dengan pericenter rp dan eksentrisitas e. Bila selanjutnya pada titik A kecepatan satelit ditambah dari Va menjadi Vca, maka satelit akan pindah dari orbit eliptik ke orbit lingkaran dengan jari-jari ra dan kecepatan Vcp.

49
Dengan demikian dapat disimpulkan di sini bahwa: Orbit eliptik yang menyinggung dua orbit lingkaran di titik pericenter dan apocenter merupakan lintas alih orbit (transfer orbit path) dari kedua orbit lingkaran tersebut. Kedua orbit lingkaran itu disebut sebagai orbit awal dan orbit akhir (orbit tujuan). Lintas alih orbit eliptik di mana peralihan terjadi di titik-titik pericenter dan apocenter disebut lintas alih orbit Hohmann. Lintas ini pertama kali diperkenalkan oleh astrodinamis dari Jerman Walter Hohmann pada tahun 1925. Dapat dibuktikan bahwa energi yang dibutuhkan dalam pindah orbit ini minimal dibandingkan dengan lintas pindah orbit dari titik-titik lain pada lintas eliptik. Pada program-program antariksa operasional lintas alih orbit Hohmann sering dipakai, antara lain: (i) penempatan satelit SKSD Palapa dari lintas parkir awal lingkaran ke
lintas geostasioner lingkaran. (ii) penjelajahan Bumi-Mars dari satelit Path-Finder dari lintas orbit awal
(lintas orbit Bumi terhadap matahari) ke lintas orbit tujuan (lintas orbit Mars terhadap matahari).
(iii) penerbangan dari Bumi ke stasiun antariksa Mir dengan orbit awal/orbit parkir dari Soyuz dan orbit tujuan orbit stasiun Mir.
(iv) dsb. 2.4.3. Orbit Parabolik Yo B r Vp
θ p P Xo rp = p/2
Gambar 2.4.4. Orbit parabolik.

50
Untuk orbit parabolik e = 1. Kecepatan orbit pada lintas ini dapat diperoleh dari integral vis-viva (2.1.18)
∞⎟⎠⎞
⎜⎝⎛ −=
aaarV 122 µ
atau
rV µ2=
(2.4.27) Dengan melihat bahwa kecepatan orbit sirkuler di tiap titik adalah Vc dimana
rVc
µ=
(2.4.28) maka kecepatan orbit di tiap titik pada lintas parabolik adalah
2cVV =(2.4.29)
Karena kecepatan V untuk tiap titik di lintas parabolik adalah kecepatan yang membuat satelit tersebut tidak pernah kembali lagi, maka kecepatan parabolik ini disebut sebagai kecepatan lepas (escape velocity) Vesc. Dengan demikian, untuk orbit parabolik kecepatan orbitnya selalu Vesc :
2cesc VV =(2.4.30)
Jadi, secara fisik ini berarti kecepatan lepas lintas parabolik besarnya adalah √2 kali besarnya kecepatan sirkuler di titik tersebut. Dengan kata lain, suatu satelit yang mengorbit sebuah planet dengan orbit eliptik, maka jika pada suatu titik di orbit diinginkan satelit tersebut lepas dari pengaruh gravitasi planet, maka kecepatan lepas Vesc yang dibutuhkan di titik itu adalah √2 kali kecepatan sirkulernya di titik tersebut Vc.

51
Vesc Vesc V Vc Vc r r lingkaran eliptik parabolik
a) Definisi kecepatan lepas b) Kecepatan lepas Vesc dari orbit Vesc p = √2 Vc awal eliptik
Gambar 2.4.5. Kecepatan parabolik ≡ kecepatan lepas
Gambar tersebut melukiskan definisi-definisi di atas. (i) Kecepatan lepas pericenter parabolik Untuk orbit parabolik, pericenter rp diberikan oleh (2.3.10), sehingga
pVp
µ2=
(2.4.30) (ii) Kecepatan lepas apocenter parabolik Karena ra → : maka
Va → 0 (2.4.31)
Jadi, bila satelit mempunyai orbit parabolik, maka pada titik yang terletak sangat jauh dari planet kecepatan satelit akan terus mendekati nol dan akhirnya sama dengan nol. Bila di titik tersebut tidak ada benda langit lain,

52
satelit akan lambat laun tertarik kembali ke planet semula dengan lintas parabolik yang sama. Alih orbit dari eliptik ke parabolik paling baik dilakukan di pericenter atau apocenter karena energi di sini minimal. Catatan: Lepas melalui lintas parabolik tidak mempunyai arti rekayasa yang bermanfaat karena kecepatan satelit setelah lepas lambat laun menjadi nol. Jadi, tidak praktis untuk penerbangan antar planet. parabolik-1 Yo Vesc p Vp 2 rp Vcp Xo ra rp Va Vca Vesc a parabolik-2
Gambar 2.4.6. Lepas dari orbit eliptik dengan orbit parabolik. 2.4.4.Orbit Hiperbolik Untuk orbit hiperbolik e > 1.

53
Yo Vp θ∞ = cos-1(-1/e) P O Xo -a rp
Gambar 2.4.7. Orbit hiperbolik Orbit ini sangat praktis untuk dipakai sebagai orbit lepas bagi penerbangan antar planet karena dua hal: (i) besar kecepatan untuk r → ∞ tidak nol. (ii) arah kecepatan pada r → ∞: menuruti arah asimtot yang orientasinya
dapat dipilih sesuai arah tujuan. Kedua hal di atas akan diperlihatkan berikut ini: (i) Kecepatan di jarak tak hingga Dari integral vis-viva (2.1.18) dan dengan r →: diperoleh
( )aV
−=∞
µ
(2.4.32)

54
Perhatikan bahwa untuk orbit hiperbolik a < 0. Kecepatan V: ini mempunyai nama khusus yaitu kecepatan lebih hiperbolik (hyperbolic excess velocity), arahnya mendekati asimtot hiperbola tersebut. Dengan demikian, kecepatan lebih hiperbolik adalah
⎟⎠⎞
⎜⎝⎛−
=
−=
∠=
−∞
∞
∞∞∞
e
aV
VV
1cos 1θ
µ
θ
(2.4.33) Yo
V∞
Vp θ∞ P O Xo |a|
Gambar 2.4.8. Kecepatan lebih hiperbolik (ii) Kecepatan di pericenter Substitusi (2.3.15) untuk rp ke integral vis-viva dengan menggunakan (2.4.32) diperoleh:

55
11
−+
= ∞ eeVVp
(2.4.34) Perhatikan suatu satelit yang akan pindah orbit dari orbit lingkaran ke orbit hiperbolik berikut. Yo Vp hip Vp
θ∞ F rp Xo
Gambar 2.4.9. Alih orbit dari pericenter lingkaran ke hiperbolik Misal satelit pindah orbit pada θ = 0 deg. Dalam hal ini kecepatan awal satelit
pc r
V µ=
Jika rp dijadikan pericenter orbit hiperbolik dimana satelit pindah orbit, maka
( ) ( ) 11
11
−−=
−−=→−−=
eaeaVear cp
µµ
atau
11−
= ∞ eVVc
(2.4.35) atau
1−=∞ eVV c(2.4.36)

56
Persamaan di atas dapat diinterpretasikan sebagai berikut: Jika suatu satelit mempunyai kecepatan orbit sirkuler Vc dipindah ke orbit hiperbolik dengan eksentrisitas e, maka kecepatan lebih hiperbolik V: yang dicapai adalah sebesar Vc √(e-1). Dengan demikian, • Bila diinginkan V: besarnya V: = n Vc maka dari (2.4.35) eksentrisitas
orbit hiperbolik yang dicapai adalah
e = n2 + 1 (2.4.37)
• Selanjutnya penambahan kecepatan yang diperlukan ∆V diperoleh
dengan mengurangkan Vp dari (2.4.34) ke Vc dari (2.4.35):
( )111
−+−
=∆ ∞ eeVV
(2.4.38) 2.5. Periode Orbit dan Waktu Saat Lewat Pericenter Definisi: Perioda orbit adalah waktu yang diperlukan untuk menjalani satu lintas
tertutup penuh dari anomali 0 deg sampai dengan anomali 360 deg.
Waktu saat lewat pericenter adalah saat satelit lewat pericenter (yang terakhir).

57
saat t θ P, θ=0o, 360o, saat τ
Gambar 2.5.1. Periode dan waktu saat lewat pericenter 2.5.1. Periode Orbit P Dalam bab sebelumnya telah dijelaskan Hukum Kepler II, yang berbunyi “untuk kurun waktu yang sama suatu satelit di lintas orbitnya menyibak daerah dengan luas yang sama”. Konsekuensinya adalah bahwa
orbitperiodeelipsluas
dtdA
=
(2.5.1) r dθ dA θ 2 b r 2 a luas elips = π a b
Gambar 2.22. Laju perubahan luas.

58
Untuk segmen terarsir
θθ drdArdrdA 221atau
21
=×=
(2.5.2) Dengan demikian
dtdr
dtdA θ2
21
=
(2.5.3) Jadi, Hukum Kepler II dapat ditulis sebagai berikut:
dtdr
Pba θπ 2
21
=
(2.5.4) Dari (2.1.6b), (2.1.14) dan (2.3.18), diperoleh
( )22
121
21
2112
eaphP
ea−===
−µµ
π
sehingga periode orbit dapat dinyatakan sebagai
µπ
32 aP =
(2.5.5) Di sini terbukti Hukum Kepler III yang menyatakan bahwa periode suatu orbit tertutup berbanding langsung dengan akar setengah sumbu panjang pangkat tiga dan berbanding terbalik dengan akar konstanta gravitasi.

59
Dalam hal ini dapat pula didefinisikan gerak rata-rata (mean motion) orbit satelit :
32
aPn µπ
=≡
(2.5.6) sehingga
32an=µ(2.5.7)
Dari (2.5.5) jika jarak rata-rata Bumi ke matahari a diambil sebagai satuan panjang dan periode Bumi mengorbit matahari P diambil sebagai satuan waktu, maka konstanta gravitasi matahari menjadi µ = 4π2. 2.5.2. Waktu saat lewat pericenter Dari hubungan momentum sudut h dan parameter orbit P
( )dtp
edph
dtdr µ
θθθ
=+
→= 2
22
cos1 Dengan demikian diperoleh
( )23
cos1 θθ
µ edpdt
+=
(2.5.8) Persamaan di atas memberikan hubungan fungsional antara anomali benar θ dengan waktu t. Persamaan tersebut dapat diintegralkan
( )∫∫+
=−=θ
τ θθ
µτ
02
3
cos1 edptdt
t
(2.5.9) dengan τ = konstanta integrasi yang memberikan saat satelit lewat pericenter orbitnya.

60
Konstanta τ merupakan suatu parameter orbit yang penting di samping dua parameter geometri orbit e dan a. Pemecahan (2.5.9) akan memberikan hubungan θ dan t. Namun untuk menyederhanakan proses penyelesaian analitis (2.5.9) akan ditransformasikan dalam bentukyang lebih sederhana melalui persamaan Kepler dalam pasal berikut. 2.6. Hubungan Kedudukan dan Waktu Suatu Satelit pada Lintas Orbitnya Persamaan (2.5.8) adalah persamaan orbit yang menghubungkan kedudukan θ dan t. Namun pemecahan langsung (2.5.8) cukup rumit. Suatu cara dengan menggunakan transformasi geometri persamaan orbit untuk tiap jenis lintas orbit dapat disajikan dalam bentuk persamaan yang lebih sederhana berikut ini. 2.6.1. Orbit lingkaran Dalam hal ini karena e = 0 maka (2.5.8) dipecahkan langsung. Vc a θ
Gambar 2.6.1. Orbit lingkaran Substitusi e = 0 ke (2.5.8) memberikan

61
θµ
dadt3
=
(2.6.1) atau
aadtd µθ 1
=
atau
cVdtda =θ
(2.6.2) Jadi, integral dari (2.5.8) menghasilkan solusi
( ) ( )τθ −= ta
Vt c
(2.6.3) 2.6.2. Orbit Eliptik : Persamaan Kepler A Yo B C r E θ O D F Xo b a a e
Gambar 2.6.2. Definisi anomali eksentrik E.

62
Elips dapat dibentuk dari dua lingkaran singgungnya. Satu lingkaran luar dengan jari-jari a dan satu lingkaran dalam dengan jari-jari b. Jika untuk suatu radius a sembarang memotong lingkaran luar di A dan lingkaran dalam B, maka titik potong garis sejajar sumbu y dari A dengan garis sejajar sumbu x dari B adalah titik C akan terletak pada elips. Untuk kebutuhan transformasi, didefinisikan sudut AOD yang disebut E: anomali eksentrik (eccentric anomaly). Anomali eksentrik E : sudut yang dibentuk oleh radius lingkaran luar elips
terhadap garis dasar sumbu panjang elips, dimana perpotongan radius lingkaran luar tersebut dengan lingkaran luar mempunyai proyeksi pada sumbu x yang memotong elips di r(θ).
Gambar di atas menunjukkan hubungan geometrik antara anomali benar θ dan anomali eksentrik E. Dari gambar 2.24 dapat diperoleh transformasi berikut:
222dari DFDCrDCF +=→∆
(2.6.4) di mana
( )EeaEaaeDFEeaEbDC
coscossin1sin 2
−=−=−==
(2.6.5) Dengan demikian
( ) ( )[ ]( )22
22222
cos1
cossin1
Eea
EeEear
−=
−+−=
Jadi
( )Eear cos1−=(2.6.6)

63
Persamaan di atas adalah persamaan orbit dinyatakan dalam variabel baru yaitu anomali eksentrik. Jika persamaan di atas disamakan dengan persamaan orbit untuk anomali benar (2.2.3) maka diperoleh identitas berikut:
θθθ
cos1coscos
cos1coscos
eeE
EeeE
++
=−
−=
(2.6.7) Kemudian karena
EeaEbrCD sin1sinsin 2−=== θ dapat diperoleh
θθθ
cos1sin1sin
cos1sin1sin
22
eeE
EeEe
+−
=−−
=
(2.6.8) Dari (2.6.7) dan (2.6.8) dapat dibuktikan bahwa
( ) ( )2
cos12
cos2
sin12
sin 2222 Er
eaEr
ea −=
+=
θθ
(2.6.9) Dengan membagi kedua persamaan di atas diperoleh
2tan
11
2tan E
ee
−+
=θ
(2.6.10) Identitas di atas menghubungkan θ dan E, merupakan identitas yang bermanfaat karena di sini terlihat bahwa θ/2 dan E/2 selalu terletak pada kuadran yang sama. Dari identitas-identitas di atas dapat diturunkan hubungan kedudukan dan waktu untuk orbit eliptik berikut:

64
Dari (2.6.10) dapat diturunkan
⎟⎠⎞
⎜⎝⎛
−+
=⎟⎠⎞
⎜⎝⎛
2tan
11
2tan Ed
eed θ
atau
dEr
ead21−
=θ
(2.6.11) Substitusi (2.6.11) ke (2.5.8) menghasilkan
( )dEea
pr
edE
reapdt 2
2
231
cos11
−=+
−=
µθµ
(2.6.12) atau
( )dEEedta
cos13 −=µ
(2.6.13) Integralkan persamaan di atas dengan melihat (2.5.6) maka didapat
( )∫∫ −=Et
dEEedtn0
cos1τ
atau
( ) EeEtn sin−=−τ(2.6.14)
Persamaan di atas disebut persamaan Kepler. Dengan mendefinisikan anomali rata-rata (mean anomaly) M:
M ≡ n ( t – τ ) (2.6.15)
persamaan Kepler dapat ditulis dalam bentuk lebih kompak :

65
M = E – e sin E (2.6.16)
Melalui persamaan di atas kedudukan satelit dihitung sejak lewat pericenter dapat diketahui. Di samping itu, bentuk persamaan Kepler di atas jauh lebih sederhana daripada bentuknya dalam variabel anomali benar, (2.5.8). Pemecahan persamaan Kepler dibahas secara rinci dalam Bab 4. 2.6.3. Orbit Parabolik : Persamaan Barker Untuk orbit parabolik e = 1 sehingga (2.5.9) menjadi
( )∫+
=−θ
θθ
µτ
02
3
cos1dpt
(2.6.17) Integral ruas kanan mempunyai solusi eksak :
( ) 2tan
61
2tan
21
cos13
02
θθθ
θθ+=
+∫
d
(2.6.18) Substitusi (2.6.18) ke (2.6.17) menghasilkan persamaan yang merelasikan kedudukan dan waktu untuk orbit parabolik
( )2
tan2
tan36 33
θθτµ+=−t
p(2.6.19)
Persamaan di atas disebut persamaan Barker. Dalam Bab 4 akan dibahas metode untuk memecahkan persamaan Barker.

66
2.6.4. Orbit Hiperbolik : Persamaan Kepler Hiperbolik Kurva hiperbola dapat dilukis melalui dua lingkaran besar dan kecilnya. hiperbola B P’ P ζ θ C Q’ F Q b a
Gambar 2.6.3. Definisi Gudermanian ζ. Titik P yang terletak pada kurva hiperbola dapat dicari sebagai berikut: Untuk suatu garis sinar dengan sudut ζ terhadap sumbu x yang memotong lingkaran besar berjari-jari a di titik B. Dari titik B ditarik garis singgung yang memotong sumbu x di Q. Dari titik potong lingkaran kecil berjari-jari b dengan sumbu x di Q’ ditarik garis singgung tegak lurus sumbu x dan memotong garis sinar di P’. Tarik garis sejajar sumbu x dari P’ dan garis sejajar sumbu y dari Q’ hingga berpotongan di P. Titik P adalah titik yang terletak pada hiperbola. Sudut ζ disebut Gudermanian, diambil dari nama matematisi hiperbola Jerman Christof Gudermann (1798-1852).

67
Dari Gambar 2.25 dapat diketahui transformasi dengan sudut Guderma-nian sebagai berikut:
222dari FQPQrFQP +=→∆
(2.6.20) di mana
( )eaaeaCFCQFQeabQPPQ
−=−=−=−===
ςςςςsecsec
tan1tan'' 2
(2.6.21) Substitusi (2.6.21) ke (2.6.20) diperoleh:
( )ςςςς 2222222 tantansec2sec −++−= eeearatau
( )ς2sec1 ear −=(2.6.22)
Dapat dilihat bahwa sudut ζ ini analogi dengan sudut anomali eksentrik pada orbit eliptik. Perhatikan bahwa karena identitas berikut
1tansec 22 =− ςς maka dapat didefinisikan sudut hiperbolik H sebagai berikut:
HH
coshsecsinhtan
==
ςς
(2.6.23) Dengan demikian maka
( )Hear cosh1−=(2.6.24)
Di sini H disebut anomali eksentrik hiperbolik (hyperbolic eccentric anomaly). Perhatikan analogi antara (2.6.24) dengan (2.6.6).

68
Dengan mempersamakan (2.6.24) dengan r = a(1-e2)/(1+e cosθ), maka dengan mudah diperoleh identitas berikut
θθθ
θθθ
cos1sin1sinh
1coshsinh1sin
cos1coscosh
1coshcoshcos
22
eeH
HeHe
eeH
HeHe
+−
=−
−=
++
=−
−=
(2.6.25) Dari identitas di atas diperoleh
2tanh
11
2tan H
ee−+
=θ
(2.6.26) Dari persamaan di atas dapat diambil turunan berikut:
⎟⎠⎞
⎜⎝⎛
−+
=⎟⎠⎞
⎜⎝⎛
2tanh
11
2tan Hd
eed θ
atau
dHee
H
dHHeed
dHHeed
11
cosh12
2cos1
2sech
11
2cos
2sech
11
2sec
22
22
−+
⎟⎠⎞
⎜⎝⎛
+⎟⎠⎞
⎜⎝⎛ +
=
−+
=⇔
−+
=
θ
θθ
θθ
Dari identitas (2.6.26) diperoleh
dHee
HHeHed
11
cosh111
1coshcosh
−+
⎟⎠⎞
⎜⎝⎛
+⎟⎠⎞
⎜⎝⎛ +
−−
=θ
Dari (2.6.24) diperoleh
dHread 12 −−
=θ
(2.6.27)

69
Substitusi persamaan di atas ke (2.5.8) diperoleh
( )223
cos11
θµ edH
reapdt
+
−−=
(2.6.28) atau
( ) ( ) dHHeadt 1cosh3
−−
=µ
Dengan demikian
( )( )∫∫ −=
−
ttdHHedt
a ττ
µ 1cosh3
(2.6.29) Diperoleh persamaan Kepler hiperbolik berikut:
N = e sinh H - H (2.6.30)
di mana
( )( )τµ−
−≡ t
aN 3
(2.6.31) Perhatikan analogi persamaan di atas dengan persamaan Kepler untuk orbit eliptik. Hubungan antara Gudermanian ζ dengan anomali eksentrik hiperbolik H diperoleh dari (2.6.23) dengan menyatakan hubungan secara eksponensial. Dengan demikian, dapat dibuktikan bahwa
( ) ⎟⎠⎞
⎜⎝⎛ +=+=
42tanlnsectanln πςςςH
(2.6.32)

70
atau
( ) ( )HH gd2
exptan2 1 ≡−= − πς
(2.6.33) Di sini gd(.) adalah fungsi Gudermanian. Sementara N disebut anomali rata-rata hiperbolik (hyperbolic mean anomaly). 2.6.5. Ringkasan Hubungan Kedudukan dan Waktu Orbit Dari pasal 2.6.1 sampai dengan 2.6.4 persamaan orbit dalam fungsi waktu dapat diringkas: (i) orbit lingkaran:
( ) ( )τµθ −= ta
t 3
(2.6.34) (ii) orbit eliptik : persamaan Kepler
M = E – e sin E di mana
( )τµ−≡ t
aM 3
(2.6.35) (iii) orbit parabolik : persamaan Barker
( )2
tan2
tan36 33
θθτµ+=−t
p(2.6.36)
(iv) orbit hiperbolik : persamaan Kepler hiperbolik
N = e sinh H - H

71
di mana
( )( )τµ−
−≡ t
aN 3
(2.6.37) Persamaan (2.6.34) s/d (2.6.37) memberikan hubungan antara kedudukan dalam orbit sebagai fungsi waktu : θ(t), E(t) dan H(t). Bab 3 akan membahas metode pemecahan persamaan Kepler, Barker dan Kepler hiperbolik. 2.7. Orientasi Bidang Orbit di Ruang Inersial Sejauh ini telah dibicarakan 3 parameter orbit: 2 parameter menentukan bentuk dan ukuran orbit dan 1 parameter menentukan kedudukan satelit saat lewat pericenter dimana perhitungan waktu diacukan. Dua parameter yang menentukan bentuk dan ukuran orbit adalah h dan e, p dan e, atau a dan e. Sedangkan parameter yang menentukan kedudukan satelit adalah τ saat satelit lewat pericenter. Dalam pasal ini dibahas 3 parameter orbit lain yang mementukan orientasi bidang orbit di ruang inersial. 2.7.1. Sudut Orientasi Ω, i dan ω ZI (kutub utara langit) Yo satelit Zo r Xo θ bidang ekuator inersial ω YI
Ω i N in XI bidang orbit
Gambar 2.7.1. Orientasi bidang orbit di ruang inersial.

72
Tata acuan koordinat inersial langit 1I = iI, jI, kI T dengan sumbu-sumbu xI, yI, zI
Tata acuan koordinat orbit
1o = io, jo, ko T dengan sumbu-sumbu xo (sepanjang vektor e), yo, dan zo (sepanjang vektor h).
Bidang orbit (bidang datar yang memuat lintas orbit) memotong bidang ekuator inersial, bidang xIyI , menurut garis potong dengan arah in. Lintas orbit memotong bidang ekuator inersial dari arah bawah ke atas bidang tersebut di titik N. Titik N ini disebut titik nodal naik (ascending node). Adapun orientasi bidang orbit di rung inersial diberikan oleh tiga sudut berikut: (i) Sudut Ω = longituda nodal naik (longitude of ascending node).
Jika yang dipakai tata acuan inersial Bumi, maka sudut ini mempunyai sebutan khusus yaitu asensio rekta nodal naik (RAAN = right ascension of the ascending node). Dari Gambar 2.7.1 dapat dilihat bahwa :
nI ii •=Ωcos(2.7.1)
Sudut Ω positif berlawanan jarum jam dilihat dari kutub utara langit.
(ii) Sudut i = inklinasi orbit (inclination) adalah sudut antara bidang orbit
dengan bidang ekuator inersial. Karena ko tegak lurus dengan bidang orbit dan kI tegak lurus bidang ekuator inersial, maka inklinasi i adalah sudut antara vektor satuan kI dan ko:
oI kki •=cos(2.7.2)
Sudut i positif berlawanan arah gerak jarum jam dilihat dari nodal naik N.
(iii) Sudut ω = argumen pericenter P (argument of pericenter), adalah
sudut pada bidang orbit dari garis potong bidang orbit terhadap bidang ekuatorial inersial pada sisi naik dengan vektor satuan io (atau e). Dengan demikian

73
ein •=ωcos
(2.7.3) Sudut ω positif berlawanan arah gerak jarum jam dilihat dari titik yang terletak di sumbu zo.
Jadi, jelas bahwa 3 parameter orbit yang melukiskan orientasi bidang orbit di ruang inersial adalah longituda nodal naik Ω, inklinasi orbit i dan argumen pericenter ω. Dengan demikian, lengkaplah keenam parameter orbit yang merupakan konstanta-konstanta integrasi (2.1.1) yaitu : e, a, τ, Ω, i dan ω. 2.7.2. Matriks Rotasi Tata Acuan Inersial ke Tata Acuan Bidang Orbit Matriks rotasi antara tata acuan inersial 1I dan tata acuan bidang orbit 1o dapat dilaksanakan dengan putaran Euler: kI kI
Ω
ko ko jn jo jI jI io
Ω
in iI iI
a) kondisi awal b) putaran Ω

74
kI kI ko ko i jm jo jm orbit jn pericenter jI jI
ω io in in iI iI
c) putaran i d) putaran ω
Gambar 2.7.2. Rotasi tata acuan inersial dengan bidang orbit a) pada kondisi awal 1I berimpit dengan 1o. Dengan demikian bidang orbit
berimpit dengan bidang ekuatorial inersial. b) Putar bidang orbit dengan sumbu putar kI dengan sudut putar Ω dan
kecepatan sudut Ω. Sudut dan kecepatan sudut putar keduanya positif.
Dengan putaran Ω ini tata acuan bidang orbit menjadi 1n = in, jn, knT
Dalam hal ini terjadi rotasi
(2.7.4) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ΩΩ−ΩΩ
=
=
1000cossin0sincos
manadi
11
In
IInn
R
R
jn . jI
Ω Ω iI in
Gambar 2.7.3a. Putaran Ω

75
c) Putar bidang orbit baru 1n dengan sumbu putar in dengan sudut putar i
positif dan kecepatan sudut i.
Dengan putaran i ini tata acuan bidang orbit menjadi 1m = im, jm, koT
Dalam hal ini terjadi rotasi
(2.7.5) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
=
iiiiR
R
nm
nnmm
cossin0sincos0
001manadi
11
kI ko . i jm i jn
Gambar 2.7.3b. Putaran i d) Putar bidang orbit baru 1m dengan sumbu putar ko dengan sudut putar ω
positif dan kecepatan sudut ω.
Dengan putaran ω ini tata acuan bidang orbit menjadi 1o = io, jo, koT
Dalam hal ini terjadi rotasi
(2.7.6) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
=
1000cossin0sincos
manadi
11
ωωωω
mo
mmoo
R
R

76
jo . jm
ω ω in io
Gambar 2.7.3c. Putaran ω Dari ketiga rotasi Euler 3-1-3 ini maka transformasi rotasi antara tata acuan inersial 1I dengan tata acuan bidang orbit dapat diperoleh sebagai berikut:
In
nm
mo
Io
II
oo
RRRR
R
≡
=
manadi
11
(2.7.7) Dari (2.7.4b), (2.7.5b) dan (2.7.6b) diperoleh
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
Ω−ΩΩ+Ω−Ω−Ω−Ω+ΩΩ−Ω
≡iii
iiiiii
R Io
cossincossinsincossincoscoscossinsincoscossinsincossinsincossincoscossincossinsincoscos
ωωωωωωωωωω
(2.7.8) Melalui transformasi ini seluruh variabel gerak r dan V lintas orbit dapat dinyatakan dalam tata acuan inersial. 2.7.3. Vektor Radius r dan Vektor Kecepatan V dalam Tata Acuan Inersial Vektor radius r dan kecepatan V dinyatakan dalam tata acuan bidang orbit telah diberikan. Dengan diketahuinya orientasi bidang orbit di ruang inersial, maka r dan V dapat dinyatakan pada tata acuan inersial.

77
a) Vektor Radius r Vektor r dinyatakan dalam tata acuan bidang orbit 1o adalah
o
ooo
rr
kjrirr
10sincosatau
0sincos
θθ
θθ
=
++=
(2.7.9) Dari (2.7.7)
II
oRrr 10sincos θθ=
(2.7.10) Dengan mengalikan ruas kanan diperoleh radius vektor r dalam tata acuan koordinat inersial:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧Ω+ΩΩ−Ω
=ψ
ψψψψ
sinsinsincoscoscossinsinsincoscoscos
iii
rr
(2.7.11) di mana
ψ ≡ θ + ω (2.7.12)
Komponen r di atas adalah pada sumbu-sumbu xI, yI, dan zI. b) Vektor Kecepatan Orbit V Dari (2.4.2) vektor kecepatan V dapat ditulis :
orr kiViVV 0++= θθ
(2.7.13)

78
atau
TorV
Vr
kii
VVV
θ
θ
=
=
1
manadi
10
(2.7.14) Tata acuan 1v dapat dihubungkan dengan tata acuan 1o menurut putaran θ sebagai berikut
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
=
1000cossin0sincos
manadi
11
θθθθ
oV
oo
VV
R
R
(2.7.15) Yo iθ V ir r θ Xo
Gambar 2.7.4. Transformasi 1v ke 1o. Dengan demikian, vektor V dalam tata acuan inersial dapat ditulis sebagai
II
oo
Vr RRVVV 10θ=
(2.7.16)

79
Substitusi (2.4.4), (2.4.5) untuk Vr dan Vθ serta (2.7.15) untuk Rvo dan
(2.7.8) untuk RoI ke persamaan di atas memberikan
( )( ) ( )( ) ( )
( ) ⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+Ω++Ω+−Ω+−Ω+−
−=
ieieeiee
eaV
sincoscoscoscoscoscossinsinsincossincoscoscossinsin
1 2ωψ
ωψωψωψωψ
µ
(2.7.17) Ruas kanan adalah komponen V pada sumbu xI, yI, dan zI. 2.7.4. Vektor Radius r Dinyatakan dalam Tata Acuan Inersial Bola Dalam paragraf sebelumnya vektor r diberikan dalam tata acuan inersial rektangular. Pada penerapan astrodinamika praktis lazim dipakai koordinat bola dimana koordinat suatu titik dinyatakan dalam sudut-sudut bola dan radius vektor. a. Koordinat Bola Perhatikan gambar berikut. Untuk suatu koordinat inersial 1I dengan pusat planet penarik, koordinat bola dinyatakan oleh
δ
αδ
αδ
sin
sincos
coscos
rr
rr
rr
I
I
I
z
y
x
=
=
=
(2.7.18) di mana rxi, ryi, dan rzi adalah komponen r dalam tata acuan 1I rektangular.

80
ZI lintas orbit r δ α YI XI
Gambar 2.7.5. Kedudukan inersial satelit pada koordinat bola. Untuk koordinat bola secara umum
α disebut longituda (longitude) δ disebut latituda (latitude)
Khusus bila planet penariknya Bumi
α disebut asensio rekta (ascencio recta) δ disebut deklinasi (declination).
b. Vektor Radius r dalam Koordinat Bola Dari (2.7.18) diperoleh
Irr 1sinsincoscoscos δαδαδ=
(2.7.19) Dengan menyamakan persamaan di atas dengan (2.7.11) diperoleh hubungan sudut koordinat bola satelit dengan sudut-sudut parameter orbit berikut:

81
ψδψψαδψψαδ
sinsinsinsincoscoscossinsincossinsincoscoscoscoscos
iii
=Ω+Ω=Ω−Ω=
(2.7.20) Selanjutnya dalam Bab 3 akan dibahas pemakaian persamaan-persamaan di atas dalam manuver-manuver orbit operasional.





















![Zur Elektrodynamik bewegter Körper [AdP 17, 891 (1905)]astro1.panet.utoledo.edu/~ljc/bewegter_k.pdf · Title: Zur Elektrodynamik bewegter Körper [AdP 17, 891 (1905)] Author: Katharina](https://img.pdfslide.tips/doc/110x75/6071e650e59c0d1376292346/zur-elektrodynamik-bewegter-krper-adp-17-891-1905-ljcbewegterkpdf-title.jpg)





