Embed Size (px)
Citation preview

Aula 4 Movimento em duas e três
dimensões
Física Geral I F -128
1

Movimento em 2D e 3D
F128 – 2o Semestre de 2012 2
• Cinemática em 2D e 3D • Exemplos de movimentos 2D e 3D
• Aceleração constante - aceleração da gravidade
• Movimento circular - movimento circular uniforme - movimento helicoidal
• Movimento relativo

Escalar vs. Vetor
F128 – 2o Semestre de 2012 3
• Escalar: grandeza sem direção associada, caracterizada apenas por um número.
• Massa de uma bola, 0.25 kg.
• Tempo para a massa se mover uma distância
• Energia de um corpo. • Algumas grandezas escalares
são sempre positivas (massa). Outras podem ter os dois sinais.
• Vetor: quantidades descritas por uma magnitude (sempre positiva) e uma direção (sentido implícito).
• Para a velocidade, por exemplo, importa não só o seu valor, por exemplo 2 m/s, mas também a direção do movimento.
. y
θ
A
i
Ay
Ax
Recapitulando a aula 3…
x
A = Axi + Ay j
A = Ax2 + Ay
2
θ= tan−1 Ay
Ax
⎛
⎝⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟

Vetores dependentes do tempo
4
Posição e deslocamento A trajetória é o lugar geométrico dos pontos do espaço ocupados pelo objeto (planeta, cometa, foguete, carro etc) que se movimenta. Qualquer ponto da trajetória pode ser descrito pelo vetor posição que denotamos por . O deslocamento entre os pontos e é dado por:
Pr!
PQ rrr !!! −=Δ
Na natureza há inúmeros exemplos de grandezas vetoriais que variam no tempo. Estamos interessados na posição e deslocamento de um corpo em movimento bidimensional ou tridimensional, e na velocidade e aceleração deste corpo.
Note que não depende da origem.
Qr!
r!Δ
r!Δ
Pr!
Qr!r!Δ
x
y
QP
)(tr!
F128 – 2o Semestre de 2012

Posição e Deslocamento
5
O vetor posição em 2D fica definido em termos de suas coordenadas cartesianas por:
No caso espacial, 3D, temos:
θy
.
x
y
x
j
i
r! r (t) = x(t)i + y(t) j
r (t) = x(t)i + y(t) j + z(t)k
F128 – 2o Semestre de 2012

Posição e Deslocamento Exemplo: um ponto na trajetória de um móvel é dado pelas equações (em unidades SI):
y(t) = -1,0t2+10,0t + 2,0
x(t) = 0,2t2+5,0t + 0,5
em t = 3 s : x(3) =17 m e y(3) =23 m em t = 6 s : x(6) =38 m e y(6) =26 m
Daí:
)3()6( rrr !!! −=Δ
Calcular o deslocamento entre 3 e 6 s:
m)ˆ3ˆ21()3()6( jirrr +≅−=Δ !!!
x
y
Posição(m)
Posição(m)0
0
15
30
45
15 30 45 60
6 F128 – 2o Semestre de 2012

Velocidade
jirrrv ˆˆ)()(ty
tx
ttttt
m ΔΔ+
ΔΔ=
ΔΔ=
Δ−Δ+=
!!!!
dtd
tttt
t
rrrv!!!
! =Δ−Δ+=
→Δ
)()(lim0
jirv ˆˆ)(dtdy
dtdx
dttd +==!
!
Como no caso unidimensional, o vetor velocidade média é:
O vetor velocidade instantânea é:
Em termos de componentes cartesianas:
ou: jvivv yxˆˆ+=!
(1)
Decorrências da definição (1): a) v! é sempre tangente à trajetória;
b) coincide com o módulo da velocidade escalar definida anteriormente.
v!
)(tr! )( ttr Δ+!r!Δ
x
y trajetória
7 F128 – 2o Semestre de 2012

Aceleração
jivvva ˆˆ)()(tv
tv
ttttt yx
m ΔΔ
+ΔΔ=
ΔΔ=
Δ−Δ+=
!!!!
dtd
tttt
t
vvva!!!
! =Δ−Δ+=
→Δ
)()(lim0
jiva ˆˆ)(dtdv
dtdv
dttd yx +==!
!
Novamente como no caso 1D, a aceleração média é:
Em termos de componentes cartesianas:
ou:
A aceleração instantânea é:
2
2 )(dttd
dtd rva
!!! ==
jaiaa yxˆˆ+=!
ou: (2)
Decorrências da definição (2): a) a aceleração resulta de qualquer variação do vetor velocidade (quer seja do módulo, da direção ou do sentido de ); b) O vetor aceleração está sempre voltado para o “interior” da trajetória.
v!
8 F128 – 2o Semestre de 2012

Velocidade e Aceleração Voltando ao exemplo do móvel, as componentes do vetor velocidade são:
Em t =3 s:
smjiv /)ˆ0,4ˆ2,6( +=!sm
dtdy
smdtdx
/0,4
/2,6
=
=
y(t) = -1,0t2+10,0t + 2,0 x(t) = 0,2t2+5,0t + 0,5
é tangente à trajetória!
100,2)0,2100,1(
0,54,0)5,00,52,0(
2
2
+−=++−==
+=++==
tttdtd
dtdyv
tttdtd
dtdxv
y
x
v!
x
79o
Posi
ção(
m)
Posição(m)0
0
15
30
45
15 30 45 60
Trajetória do carro
9 F128 – 2o Semestre de 2012

x
79o
Posi
ção(
m)
Posição(m)0
0
15
30
45
15 30 45 60
Trajetória do carro
Velocidade e Aceleração
y(t) = -1,0t2+10,0t + 2,0
x(t) = 0,2t2+5,0t + 0,5
As componentes do vetor aceleração são:
222 /0,22,4 smaaaa yx =≅+== !0,5
4,00,2 −=−==
x
y
aa
tgθÂngulo: o79−≅θ
Módulo:
2/)ˆ0,2ˆ4,0( smjia −=!
100,2)0,2100,1(
0,54,0)5,00,52,0(
2
2
+−=++−==
+=++==
tttdtd
dtdyv
tttdtd
dtdxv
y
x
( ) 2
2
/0,2100,2
/4,0)54,0(
smtdtd
dtdv
a
smtdtd
dtdva
yy
xx
−=+−==
=+==
10 F128 – 2o Semestre de 2012
O Problema inverso
tdtavtvt
t
′′=− ∫0
)()( 0!!!
tdtvrtrt
t
′′=− ∫0
)()( 0!!!
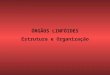
que, se integrada, nos fornece o deslocamento:
Este processo deve ser efetuado para cada componente cartesiana do vetor considerado.
podemos integrá-la e obter a velocidade:
)(ta!Conhecida a aceleração ,
11 F128 – 2o Semestre de 2012

Q1: Movimento circular uniforme
F128 – 2o Semestre de 2012
A. I B. II C. III D. IV
[MC Types]
Quais dos vetores abaixo melhor representam a velocidade de uma partícula em um movimento circular uniforme?
I
III IV
II
12

Alguns exemplos de movimentos em 2D e 3D
13
F128 – 2o Semestre de 2012

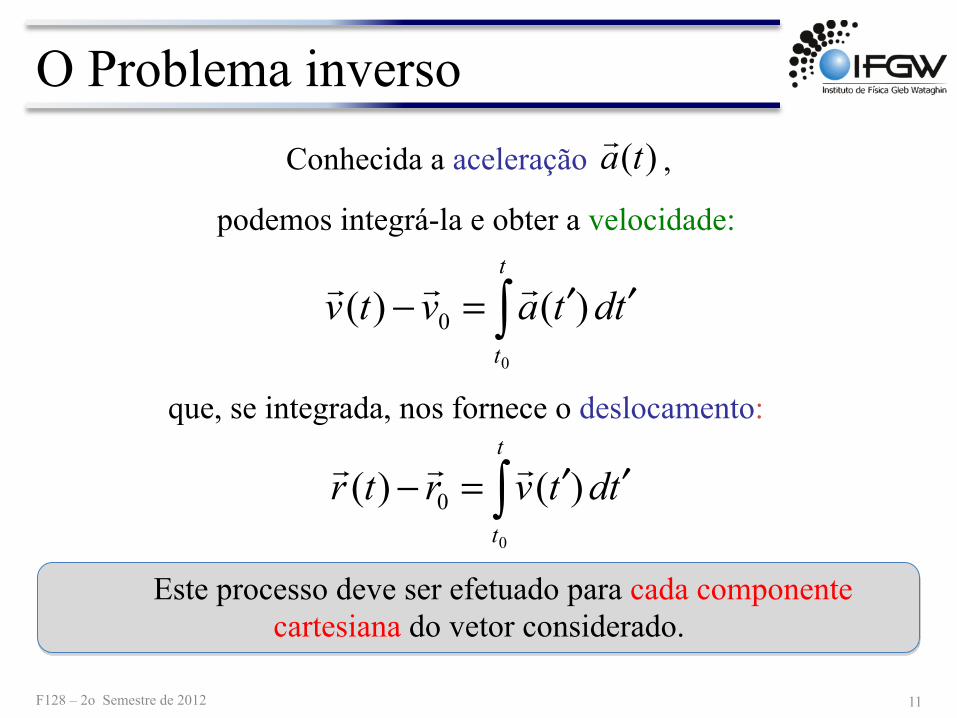
1. Aceleração constante Aceleração constante à teremos um movimento no plano definido pelos vetores velocidade inicial e aceleração: Movimento 2D Vamos escolher os eixos de tal forma que o movimento se dê no plano xy. Aceleração constante no plano xy: ax e ay constantes ou seja:
2 problemas 1D independentes
Teremos um MRUA na direção x e outro na direção y. x
y
14 F128 – 2o Semestre de 2012
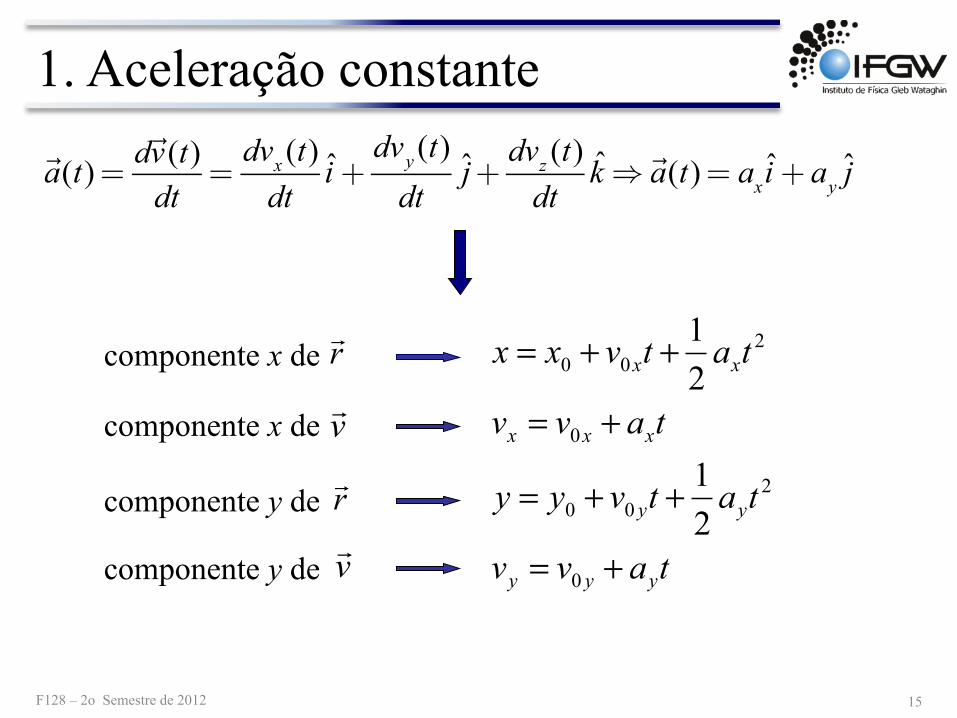
1. Aceleração constante
tavv
tatvyy
tavv
tatvxx
yyy
yy
xxx
xx
+=
++=
+=
++=
0
200
0
200
21
21
componente y de
r!
v!componente x de
componente x de
componente y de v!r!
a(t) =
dv(t)dt
=dvx (t)
dti +
dvy (t)dt
j +dvz (t)
dtk⇒a(t) = axi + ay j
15 F128 – 2o Semestre de 2012

1. Aceleração constante
componente x de
componente y de
componente x de
componente y de
Nesse caso ay = -g e ax=0. Na direção x, vx é constante!
r!
v!
Nota: e são as condições iniciais do movimento. 0r!
0v!
gtvv
gttvyy
vvtvxx
yy
y
xx
x
−=
−+=
==+=
0
200
0
00
21
constanter!
v!
jyixr ˆˆ000 +=!
jvivv yxˆˆ
000 += !!Em t = 0:
Um caso particular: movimento sob aceleração da gravidade
16 F128 – 2o Semestre de 2012

1. Aceleração constante
2200
0
21 xvgx
vv
yxx
y −=
Se tomamos x0 = y0 = 0 (saindo da origem): de x = v0xt , temos: t = x/v0x
Substituindo t na equação para y encontramos a equação da trajetória:
(Equação de uma parábola !) Fotografia estroboscópica do movimento parabólico
O movimento na direção y não depende da velocidade vx. Na figura ao lado, duas bolas são jogadas sob a ação da gravidade. A vermelha é solta (v0y=0) e a amarela tem velocidade inicial horizontal v0x.
Em qualquer instante elas estão sempre na mesma posição vertical!
Um caso particular: movimento sob aceleração da gravidade
17 F128 – 2o Semestre de 2012

1. Aceleração constante
Problema do Projétil: Sistema 2D separável em 2 x 1D http://www.youtube.com/watch?v=NO9c9EM39GM
Um caso particular: movimento sob aceleração da gravidade
18 F128 – 2o Semestre de 2012

1. Aceleração constante
Movimento de Projéteis em esportes:
Um caso particular: movimento sob aceleração da gravidade
http://science360.gov/obj/tkn-video/f04949b6-fbf9-4f0a-87b9-91780f9c0951
http://science360.gov/obj/tkn-video/fc729ef0-22ee-4f61-bb2a-b6c07685fb02
19 F128 – 2o Semestre de 2012

1. Aceleração constante
Objeto lançado com velocidade , formando um ângulo com a horizontal.
)0,0( 000 ≠≠ yx vvv!0θ
Tempo para atingir altura máxima h (quando ):
gv
gv
t yh
000 senθ==
0=yv
Altura máxima h :
Note que o movimento é simétrico: o corpo leva um tempo th para subir e o mesmo tempo th para voltar ao mesmo nível.
R
( )g
vgttvh hh 2sen
21sen
2002
00θθ =−=
constantecos 000 === θvvv xx
gtvgtvv yy −=−= 000 senθ
Um caso particular: movimento sob aceleração da gravidade
x
y
Trajetória g
20 F128 – 2o Semestre de 2012

1. Aceleração constante
0
200
000 2sensen2cos2 0 θθθgv
gvvtvR hx =⎟⎟⎠
⎞⎜⎜⎝⎛==
Alcance: distância horizontal percorrida até o objeto voltar à altura inicial : R = x(2th )
0
2
2sen0 θgv
R=
Para um dado módulo da velocidade inicial, o alcance será máximo para
22 0 /πθ = o450 =θ
gv
R2
max0=
Então:
Um caso particular: movimento sob aceleração da gravidade
21 F128 – 2o Semestre de 2012

1. Aceleração constante
As componentes da velocidade são: vx = 10 m/s vy = (-9,8 t) m/s
b) ache os ângulos e de e com a horizontal em t =1,0 s
θ
r!
m)ˆ9,4ˆ10( 2 jtitr −=!
Exemplo: Bola sai do penhasco com v = 10 m/s na horizontal. a) descreva o movimento, ou seja, ache vx(t), vy(t), x(t) e y(t).
As componentes do vetor posição são: x = 10 t m y = (-4,9 t2) m
θ ′ v!
49,0−==xytgθ
s/m)ˆ8,9ˆ10( jtiv −=!
98,0−==′x
y
vv
tgθ
r!
22 F128 – 2o Semestre de 2012

2. Movimento circular uniforme
Este movimento tem velocidade de módulo constante, porém sua direção muda continuamente.
Exemplos: Movimento de satélites artificiais; Pontos de um disco de vitrola; Pontos de um disco rígido de computador; Ponteiros de um relógio; Nós, girando com o movimento da Terra.
23 F128 – 2o Semestre de 2012

2. Movimento circular uniforme
dtdθω =
dtdRv
dtds θ==
Definimos assim a velocidade angular :
v Rω=
Tf 1=
ωπ2=TFrequência e período:
ω
fπω 2=
Então:
cte==dtdθω tωθθ += 0Se :
(v: velocidade tangencial)
(Movimento circular uniforme)
Para descrever o MCU usamos as coordenadas polares R e θ. O arco sobre a trajetória que subentende um ângulo θ é: s = Rθ. A posição angular θ é uma função do tempo, θ(t) . O arco descrito em dt é dado por ds = R dθ. Então:
24 F128 – 2o Semestre de 2012
x
y
O
Rds
θ
dθθ+dθ
x
y
O
v(t)
v(t + ∆t)
∆φ∆v
a
x
y
O
r(t)
r(t + ∆t)
v(t)v(t + ∆t)
∆φ
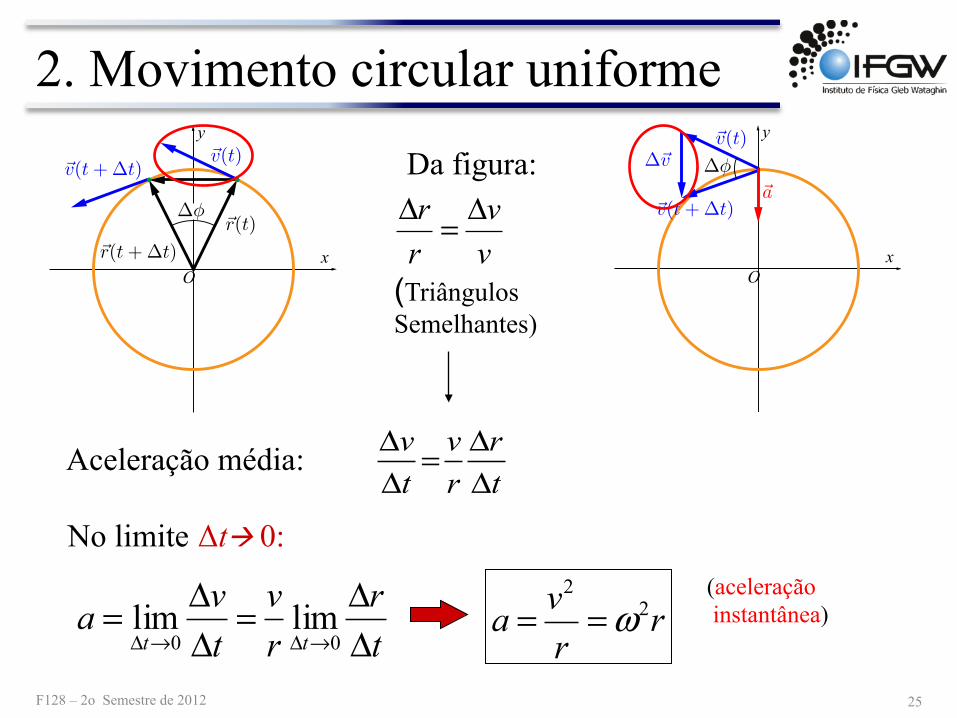
2. Movimento circular uniforme
vv
rr Δ=Δ
tr
rv
tva
tt ΔΔ=
ΔΔ=
→Δ→Δ 00limlim
No limite Δt! 0: 2
2va rr
ω= =(aceleração instantânea)
tr
rv
tv
ΔΔ=
ΔΔAceleração média:
(Triângulos Semelhantes)
Da figura:
25 F128 – 2o Semestre de 2012

x
y
O
r1
r2
r3
v1
v2
v3
a1a2
a3
2. Movimento circular uniforme
rrr!
=ˆ
Aqui também podemos usar um vetor unitário: (note que este vetor varia com o movimento)
A aceleração fica:
rrva ˆ2
−=!(a aceleração tem a direção do vetor posição e aponta para o centro da circunferência. Esta é a aceleração centrípeta).
Ou:
ra !! 2ω−=
26 F128 – 2o Semestre de 2012

2. Movimento circular uniforme
Exemplo: Um pião roda uniformemente com frequência de 16 Hz. Qual é a aceleração centrípeta de um ponto na superfície do pião em r = 3 cm ?
fπω 2=
A velocidade angular é:
2 rad (16 ) 101 rad/sHzω π= =
Daí a aceleração fica: 2 2306a r m sω= =
27 F128 – 2o Semestre de 2012

3. Movimento circular acelerado
F128 – 2o Semestre de 2012
.)( constdtdt ≠= φω
dtdRtv
dtds φ== )(
é o módulo da velocidade que também varia no tempo e a velocidade angular é dada por
Consideremos agora o caso em que a velocidade angular não é constante. Então,
Como o módulo da velocidade também varia há uma componente tangencial da aceleração dada por
)()()( tRdttdR
dttdv αω ≡=
onde é a aceleração angular )(tα
x
y
O
dφ ρ=
R
φφ + dφ
ds
28

3. Movimento circular acelerado
)()()()( tatadttvdta TN
!!!
! +==
!"#"$%
&
&
&
)(
2
)(
ˆˆ)(
tata
N
T
rRvvRta ⎟
⎠⎞⎜
⎝⎛−+=α
Aceleração total é a soma de uma componente tangencial e uma normal
ou ainda
)()()( 22 tatata TN +=
x
y
O
dφ ρ=
R
φφ + dφ
ds
29 F128 – 2o Semestre de 2012

3. Movimento circular acelerado
Componentes cartesianas Componentes tangencial e perpendicular
30 F128 – 2o Semestre de 2012

4. Movimento Helicoidal
,ˆˆ)(senˆ)(cos)( ktvjtRitRtr z++= ωω!
kvjtRitRtv zˆˆ)(cosˆ)(sen)( ++−= ωωωω!
jtRitRta ˆ)(senˆ)(cos)( 22 ωωωω −−=!
É um movimento tridimensional que pode ser visto como a composição de um MCU no plano (x,y) com um movimento uniforme na direção z. O vetor posição de uma partícula com este movimento será:
E a aceleração será:
A velocidade será: zveR ω,com constantes.
31 F128 – 2o Semestre de 2012

4. Movimento Helicoidal
)()( 2 trta xyxy!! ω−=
No plano xy a partícula tem as coordenadas: )(cos)( tRtx ω=,)(sen)( tRty ω=
que caracterizam um MCU de período ωπ2=T
ωRtvxy =)(
Rrv
ta xyxy
22
)( ω==
Em um período T do movimento no plano xy , a partícula percorre uma distância h no eixo z:
ωπ z
zvTvh 2== (passo da hélice no
movimento helicoidal)
e tem a velocidade:
e a aceleração:
Vetorialmente:
32 F128 – 2o Semestre de 2012

Movimento Relativo em 2D e 3D
Conhecido o movimento de uma partícula P em um dado sistema de coordenadas (referencial) B, que se move em relação a outro referencial A, como descrever o movimento da partícula neste outro referencial (A)?
Posição relativa:
A velocidade relativa é:
Problema:
,BAPBPA rrr !!! +=
BAPBPA
BAPBPA
vvv
dtrd
dtrd
dtrd
!!!
!!!
+=⇓
+=
P A B
•
PAr!
PBr!
BAr!
que é função do tempo:
)()()( trtrtr BAPBPA!!! +=
vBA
vPB
vPA
33 F128 – 2o Semestre de 2012

Movimento relativo em 2D e 3D Aceleração relativa:
0!! =BAa
(a aceleração é a mesma quando medida em dois referenciais inerciais).
A B
BAPBPA
BAPBPA
aaa
dtvd
dtvd
dtvd
!!!
!!!
+=⇓
+=
Em referenciais inerciais (os que se movem um em relação ao outro em translação
retilínea e uniforme):
PBPA aa !! =
PBa!
PAa!
BAa!
BAa!
PBa!
PAa!
34 F128 – 2o Semestre de 2012

Movimento relativo em 2D
Exemplo: Um barco com velocidade de 10 km/h em relação ao rio tenta ir de uma margem a outra, conforme a figura. A velocidade da água em relação à Terra é de 5 km/h. Qual deve ser a velocidade do barco em relação à Terra para que ele cruze o rio perpendicularmente às margens?
Por causa do movimento relativo, o barco deve seguir uma trajetória noroeste. O módulo da velocidade deve ser:
A direção pode ser dada pelo ângulo em relação à vertical:
km/h7,8510 2222 =⇒−=−= BTRTBRBT vvvv
0308,75garctgarc ≅≅= t
vv
BT
RTθ
RTv!
BRv!
BTv!
35 F128 – 2o Semestre de 2012