Embed Size (px)
Citation preview

Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
Automatisiertes Fahrzeuggetriebe mitelektrischer Regelung Hybridgetriebe
Prof. Dr.- Ing. Peter Tenberge *Prof. Dr.- Ing. Wilfried Hofmann
Fachtagung E-Maschine im Antriebsstrang
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
Automatisiertes Fahrzeuggetriebe mit elektrischer Regelung
Hybridgetriebe
Anforderungen an ein Fahrzeuggetriebe
Konzept und Aufbau des Hybridgetriebes
Funktionen und Regelung des Hybridgetriebes
Simulationsergebnisse
1
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
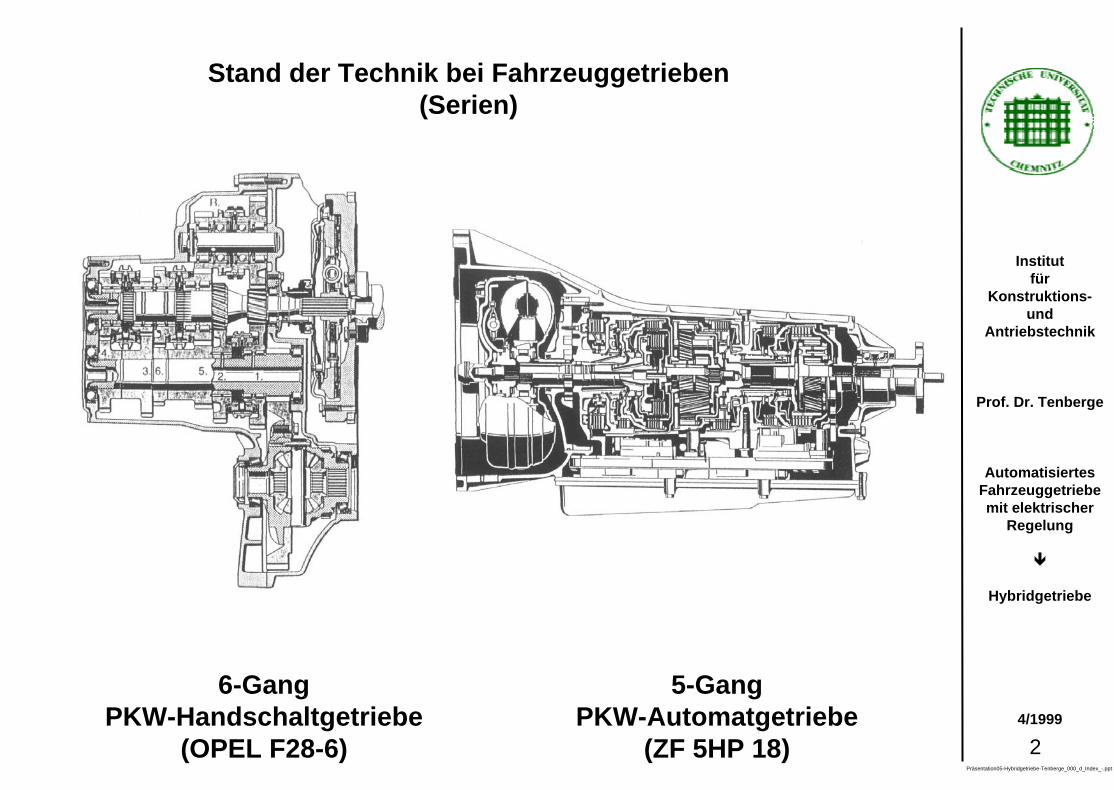
Stand der Technik bei Fahrzeuggetrieben(Serien)
6-GangPKW-Handschaltgetriebe
(OPEL F28-6)
5-GangPKW-Automatgetriebe
(ZF 5HP 18) 2
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
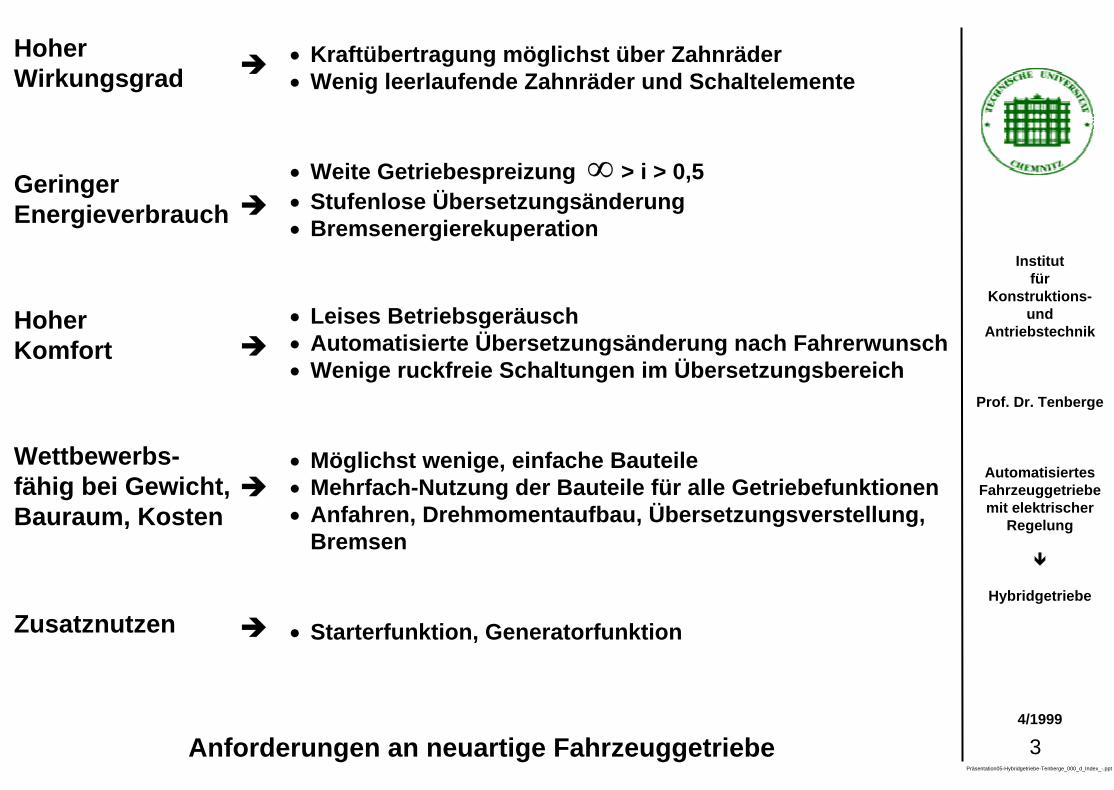
HoherWirkungsgrad
• Kraftübertragung möglichst über Zahnräder• Wenig leerlaufende Zahnräder und Schaltelemente
GeringerEnergieverbrauch
• Weite Getriebespreizung ∞ > i > 0,5• Stufenlose Übersetzungsänderung• Bremsenergierekuperation
• Leises Betriebsgeräusch• Automatisierte Übersetzungsänderung nach Fahrerwunsch• Wenige ruckfreie Schaltungen im Übersetzungsbereich
HoherKomfort
Wettbewerbs-fähig bei Gewicht, Bauraum, Kosten
• Möglichst wenige, einfache Bauteile• Mehrfach-Nutzung der Bauteile für alle Getriebefunktionen• Anfahren, Drehmomentaufbau, Übersetzungsverstellung,
Bremsen
Zusatznutzen • Starterfunktion, Generatorfunktion
Anforderungen an neuartige Fahrzeuggetriebe 3
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
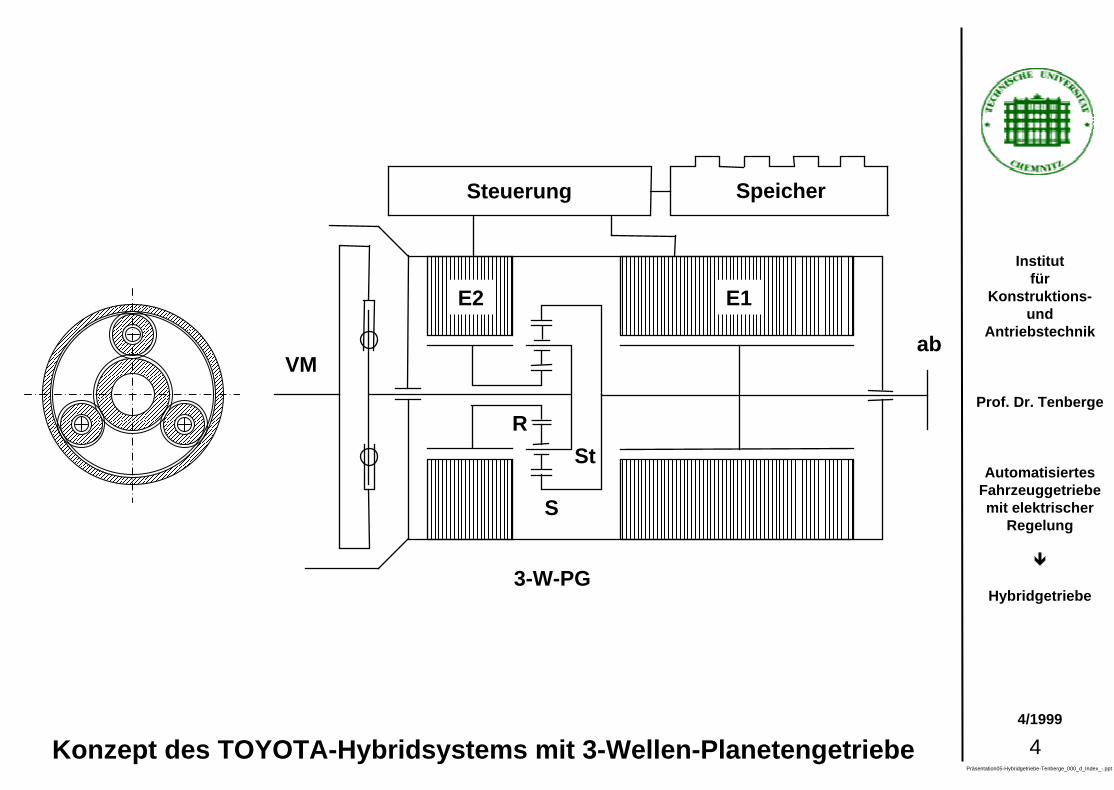
3-W-PG
S
RSt
Speicher
VM
Steuerung
ab
E2 E1
Konzept des TOYOTA-Hybridsystems mit 3-Wellen-Planetengetriebe 4
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
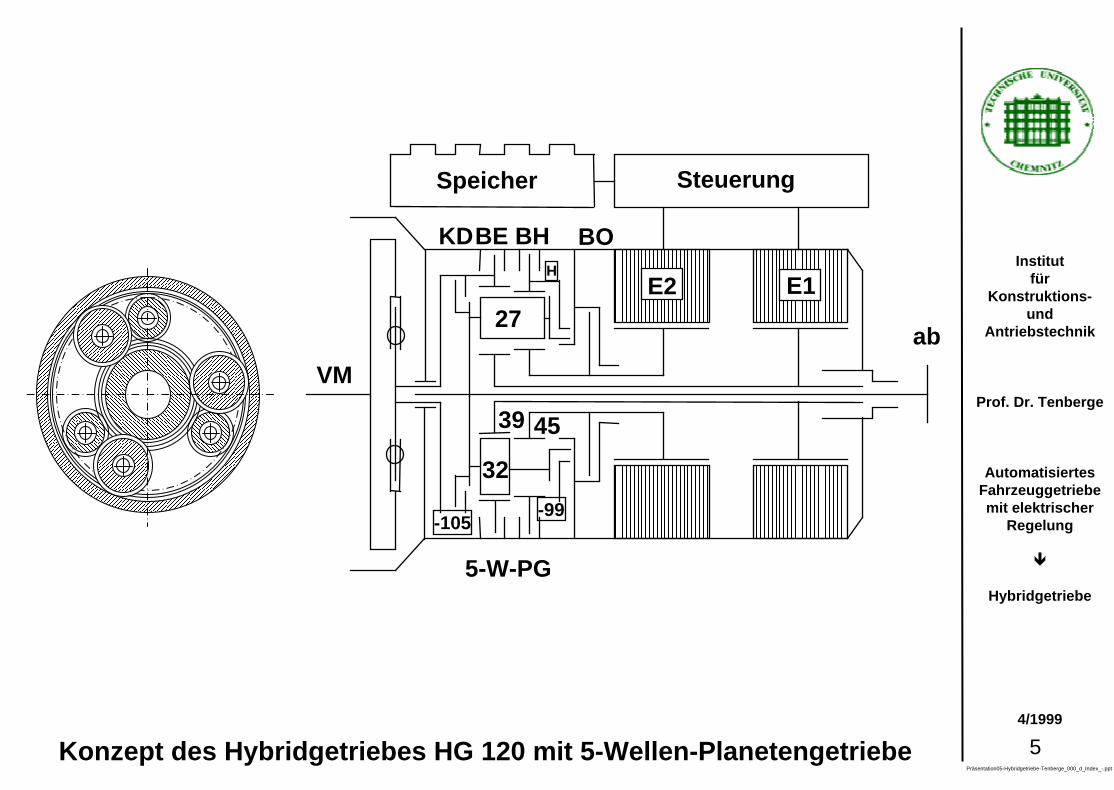
5-W-PG
-105-99
BO
27
39
32
45
KDBE
H
BH
Steuerung
VM
Speicher
ab
E2 E1
5Konzept des Hybridgetriebes HG 120 mit 5-Wellen-Planetengetriebe
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
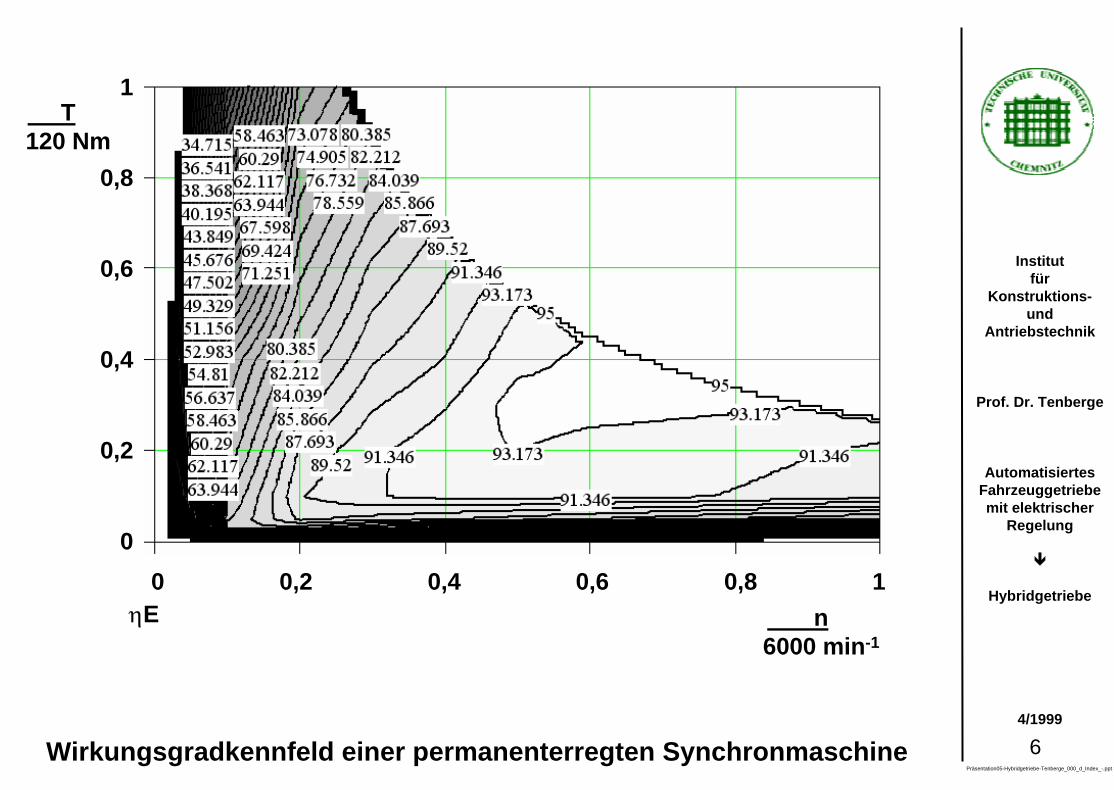
1
0,8
0,6
0,4
0,2
00 0,2 0,4 0,6 0,8 1
T 120 Nm
ηE n 6000 min-1
6Wirkungsgradkennfeld einer permanenterregten Synchronmaschine
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
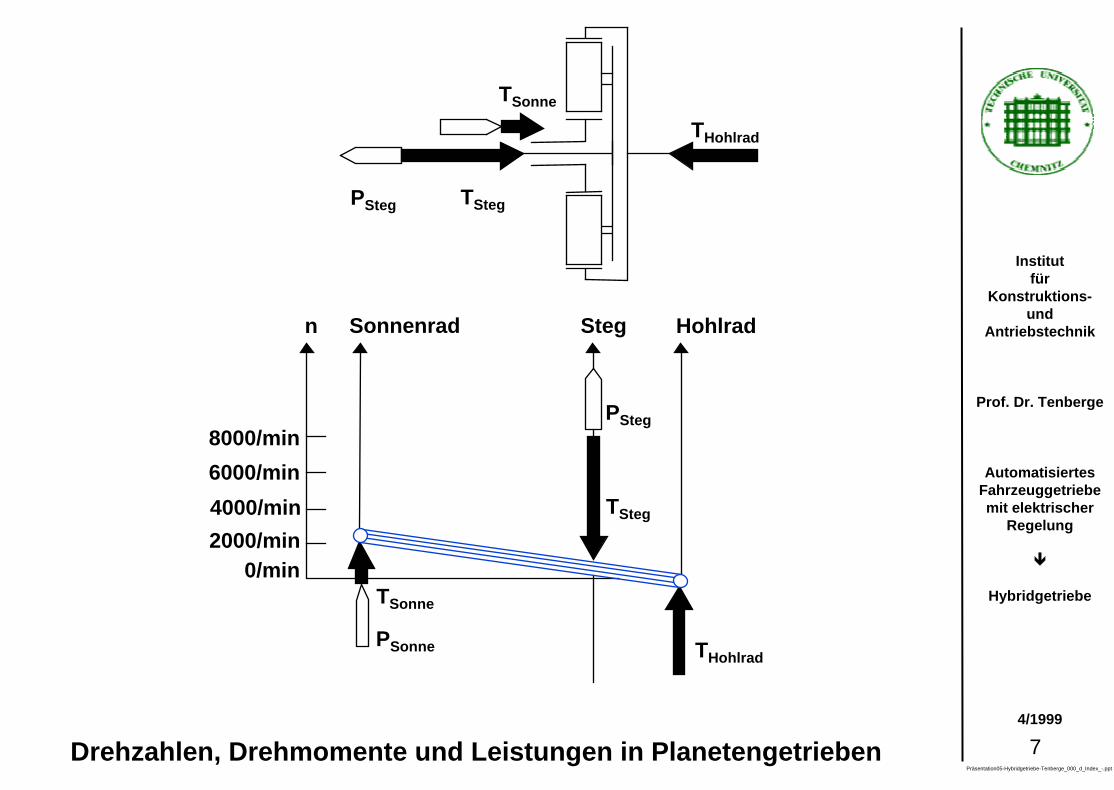
Sonnenradn Steg Hohlrad
PSteg
TSonne
THohlrad
TSteg
PSteg
TSteg
TSonne
PSonne THohlrad
8000/min6000/min4000/min2000/min
0/min
7Drehzahlen, Drehmomente und Leistungen in Planetengetrieben
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
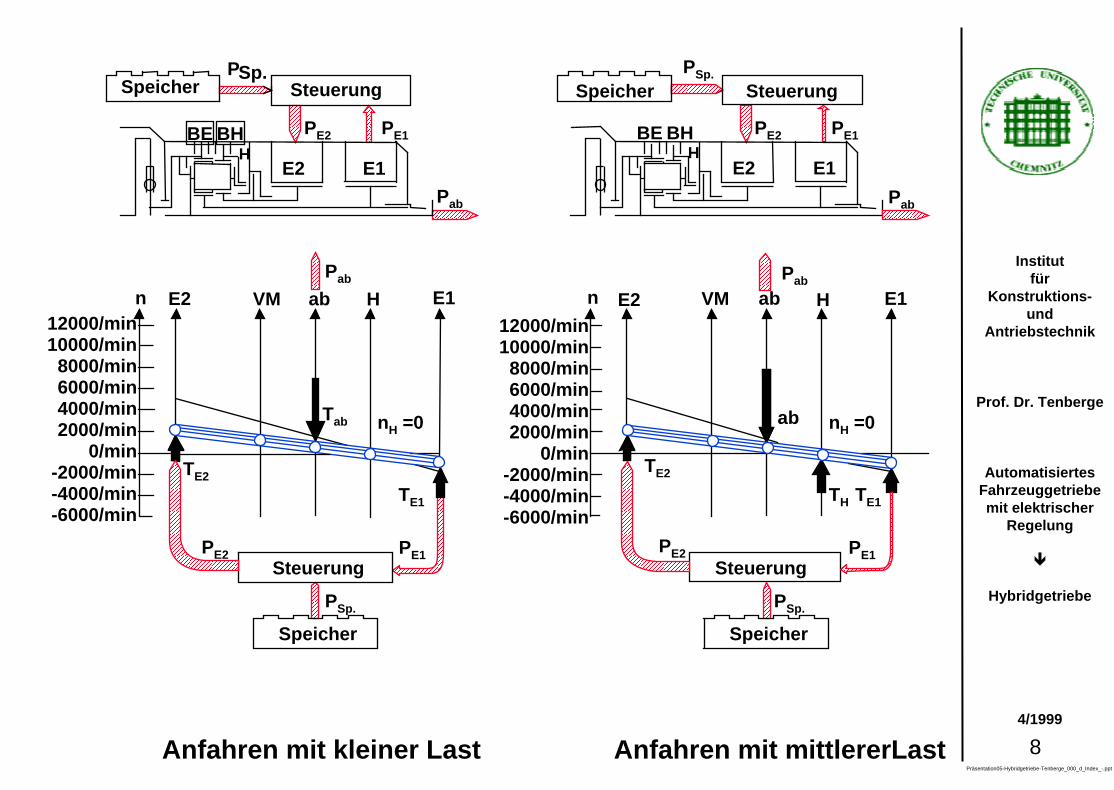
E1Pab
Steuerung
PSp.
PE2 PE1
TE2
Tab nH =0
TE1
PSp.
SteuerungPE2 PE1
TE2
TE1
nH =0ab
HabVME2nn E2 VM ab H E112000/min
2000/min
-6000/min-4000/min-2000/min
0/min
4000/min6000/min8000/min
10000/min
Speicher
TH
Speicher SteuerungPSp.
SpeicherPSp.
Steuerung
Speicher
12000/min
2000/min
-6000/min-4000/min-2000/min
0/min
4000/min6000/min8000/min
10000/min
Pab
BE BH H
PE2
E2
PE1
E1
BE BH H
Pab
PE2
E2
PE1
E1
Pab
Anfahren mit kleiner Last Anfahren mit mittlererLast 8
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
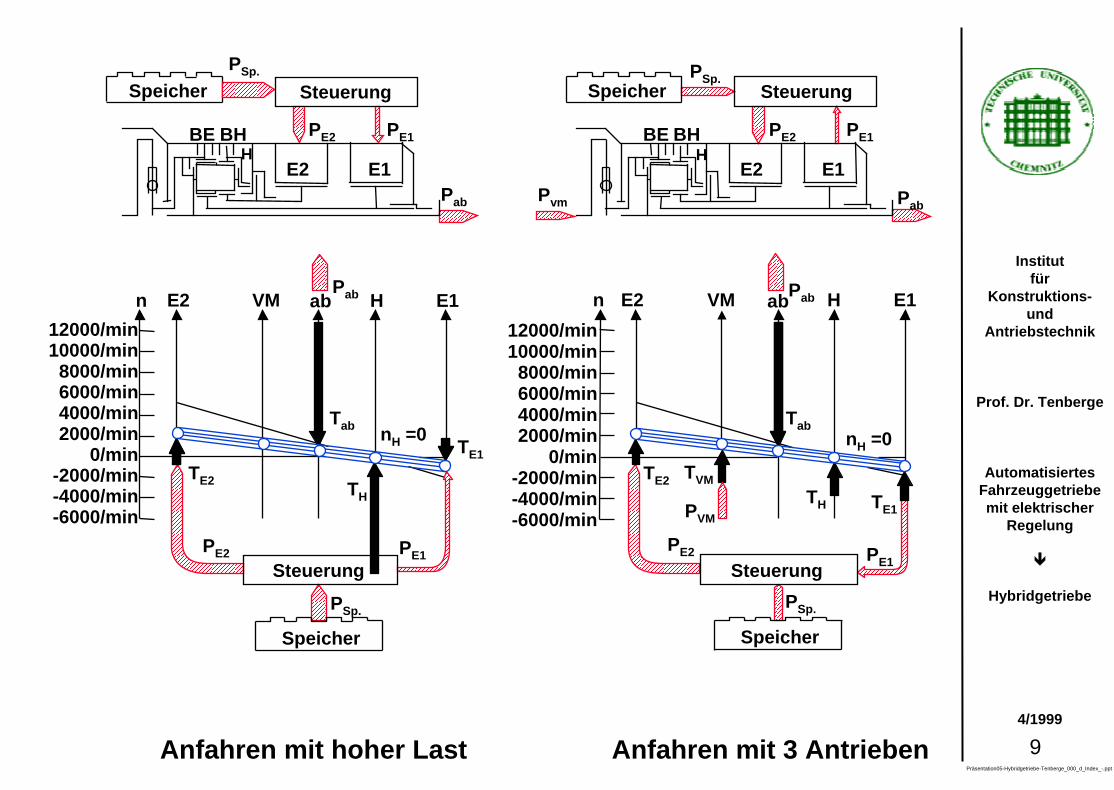
Steuerung
Pab
Steuerung
PSp.
n E2 VM ab H E1 n E2 VM ab H E1
Speicher
Pab
PE2 PE1
TE1
Tab
TE2 TH
TE2TH
TVM
PVM
PE2
Tab
TE1
PE1
PSp.
Speicher
12000/min
2000/min
-6000/min-4000/min-2000/min
0/min
4000/min6000/min8000/min
10000/min12000/min
2000/min
-6000/min-4000/min-2000/min
0/min
4000/min6000/min8000/min
10000/min
nH =0 nH =0
Speicher SteuerungSpeicherPSp.
Steuerung
Pvm
PSp.
PabPab
BE BH H
PE2
E2
PE1
E1
BE BH H
PE2
E2
PE1
E1
Anfahren mit hoher Last Anfahren mit 3 Antrieben 9
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
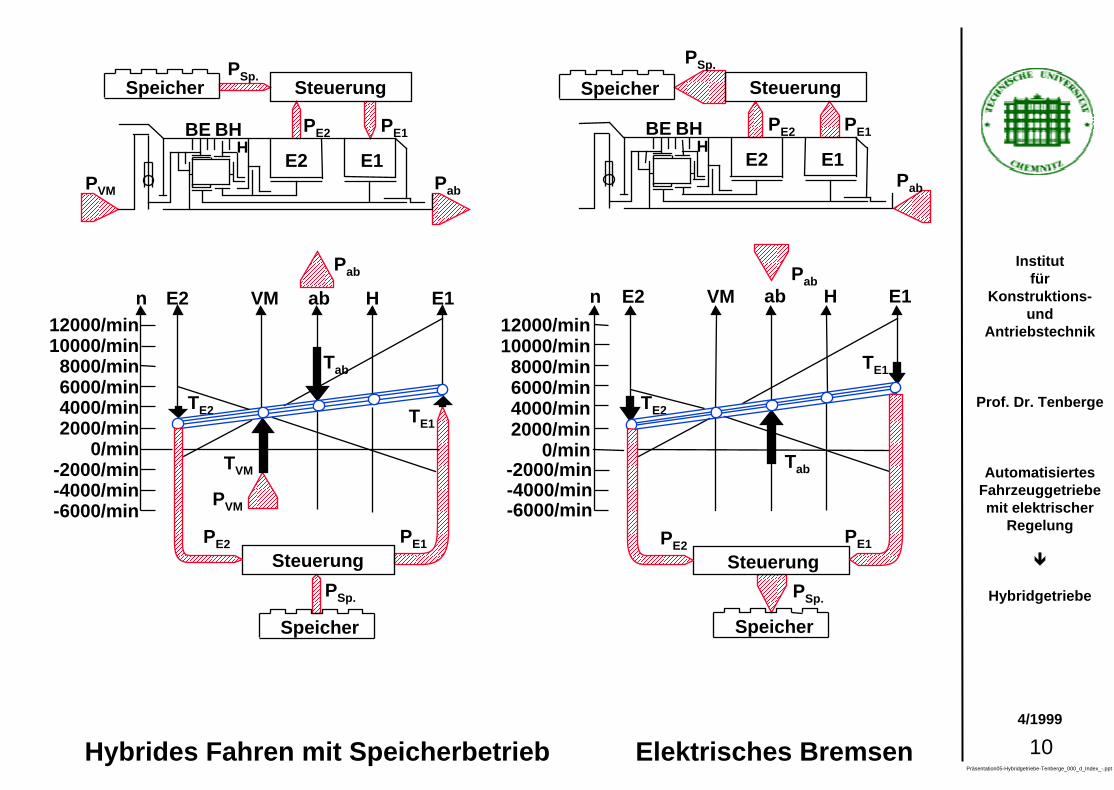
nn E2 VM ab H E112000/min
2000/min
-6000/min-4000/min-2000/min
0/min
4000/min6000/min8000/min
10000/min
Pab Pab
TE1TE2
TVM
PVM
PE2 PE1Steuerung
PSp.
Speicher
12000/min
2000/min
-6000/min-4000/min-2000/min
0/min
4000/min6000/min8000/min
10000/min
E2 VM ab H E1
TE1
TE2
Tab
Tab
PE2 PE1
PSp.
Speicher
Steuerung
PVM
SteuerungPSp.
Speicher SpeicherPSp.
Steuerung
Pab
BE BH H PE2
E2
PE1
E1Pab
BE BH H PE2
E2
PE1
E1
10Hybrides Fahren mit Speicherbetrieb Elektrisches Bremsen
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
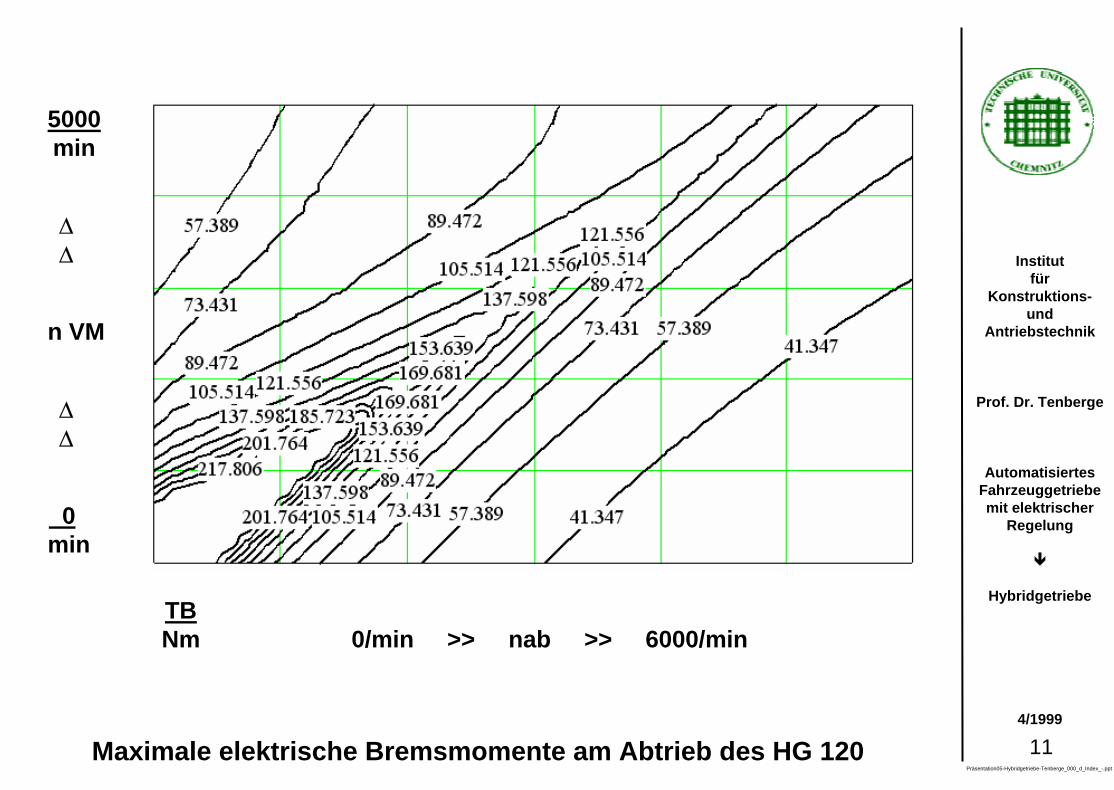
5000min
∆∆
n VM
∆∆
0 min
TBNm 0/min >> nab >> 6000/min
11Maximale elektrische Bremsmomente am Abtrieb des HG 120
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
E2
Steuerung
abVMPab =0
H E1 n E2
nvm=0
Steuerung
PSp.
abVM H E1
Speicher SteuerungPSp.
PVM Pab
Speicher SteuerungPSp.
Pab =0
n
12000/min
2000/min
-6000/min-4000/min-2000/min
0/min
4000/min6000/min8000/min
10000/min
Pab
Tab
PE2
Speicher Speicher
PE2
TE1
Tab
PE1
TE2
TE2
TE1
TVM
PVM
nab=0
PSp.
PE2 PE1BE BH H
E2 E1BE BH H
E2 E1
12000/min
2000/min
-6000/min-4000/min-2000/min
0/min
4000/min6000/min8000/min
10000/min
PE1
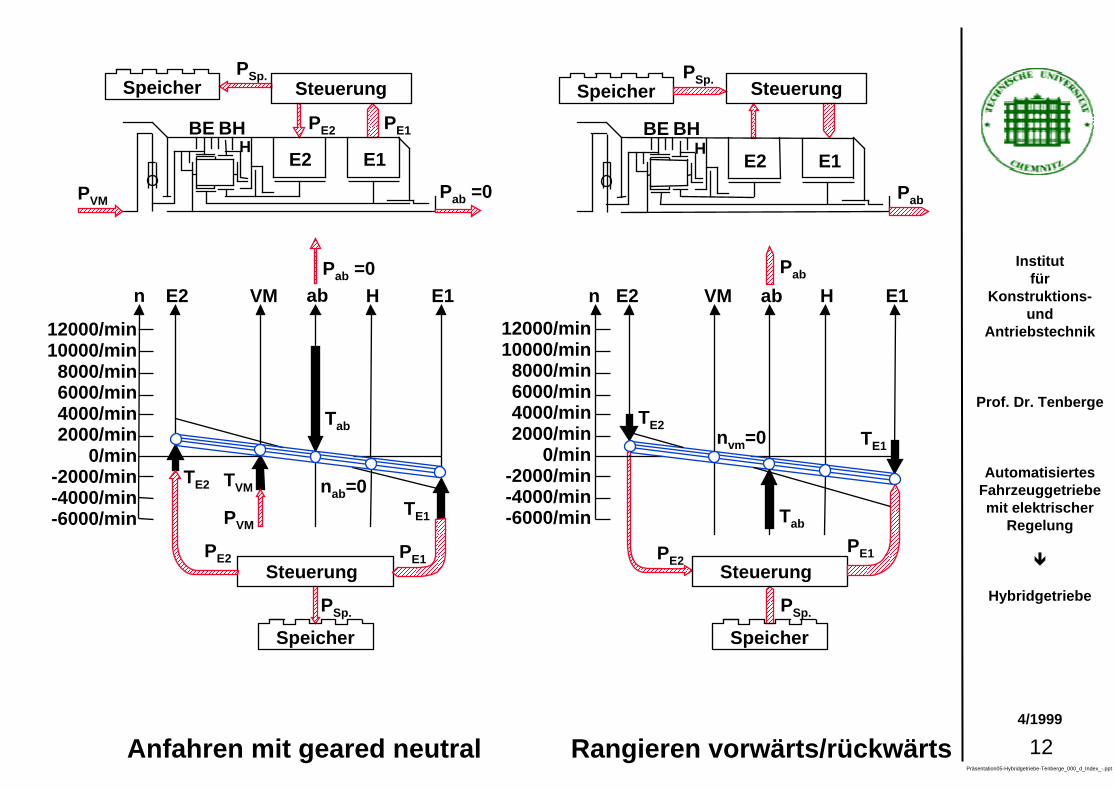
Anfahren mit geared neutral Rangieren vorwärts/rückwärts 12
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
Betriebsmodus
ElektrischesAnfahren
Hybrides Fahrenmit i = i1 ca. 2
Hybrides Fahreni1 > i > imin
Geared neutralAnfahren i > i1
ElektrischBremsen
Rangieren
TabE1 E2
V-Motor Welle HE-Maschine
klein
hoch
hoch
ca. -2 TVM
drehzahlgeregelt
lastgeregelt
lastgeregelt
geschleppt
drehzahlgeregelt
drehzahlgeregelt
drehzahlgeregelt
drehzahlgeregelt
lastgeregelt
klein
hoch
klein
f (nab,nan)
lastgeregelt
lastgeregelt
lastgeregelt
geschleppt
lastgeregelt
lastgeregelt
lastgeregelt
lastgeregelt
lastgeregelt
geschleppt
geschleppt
lastgeregelt
lastgeregelt
lastgeregelt
lastgeregelt
geschleppt
BE zu
BE auf
BH zu
BH auf
BH auf
BH auf
BH auf
BH auf
BH zu
BH zu
BH zu
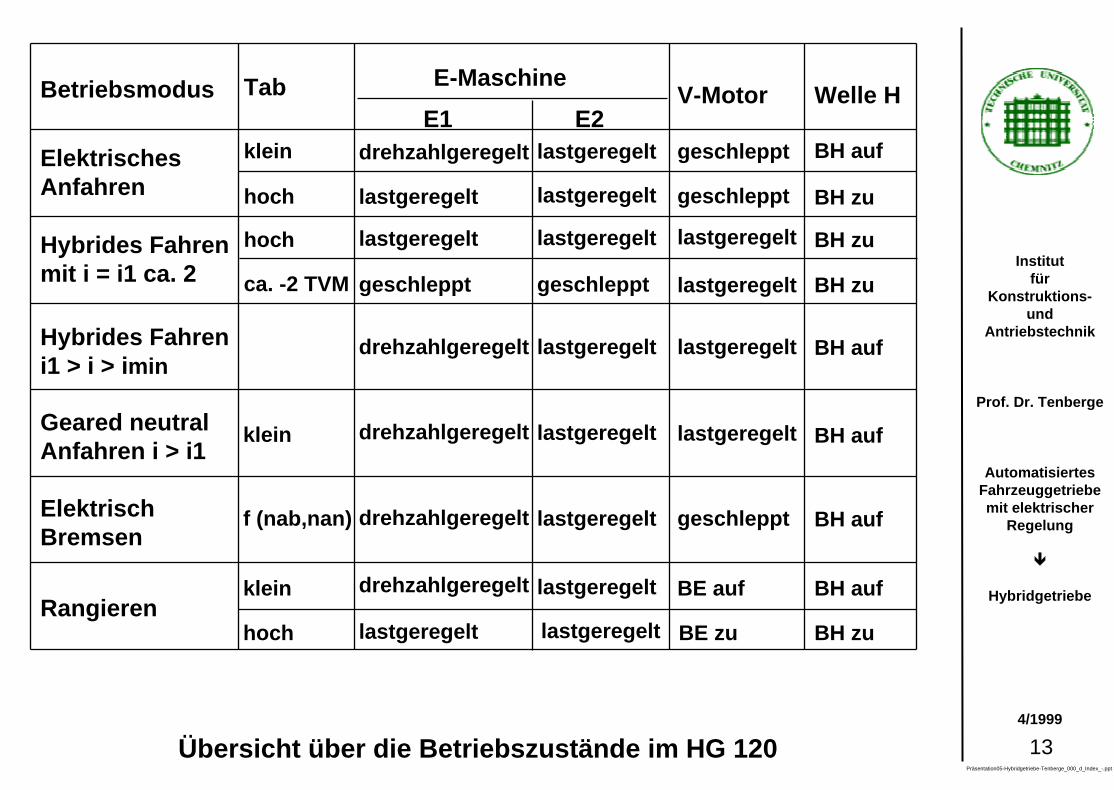
Übersicht über die Betriebszustände im HG 120 13
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
P
Rr
N
D
Rv
=
=
=
=
Parken
Rangieren
Neutral
Fahrbetrieb
Elektrisch entriegelte, federbelastetemechanische Parksperre aufAbtriebswelle wirkend
Rangieren vorwärts und Rangieren rückwärts in einerFahrschalterebene
Beide E-Maschinen lastfrei,alle Schaltelemente offen
Elektrisches Anfahren + hybrides Fahrenmit adaptiver Drehzahlregelung. Anfahrenmit geared neutral wird über den Ladezustand des Speichers automatischerkannt
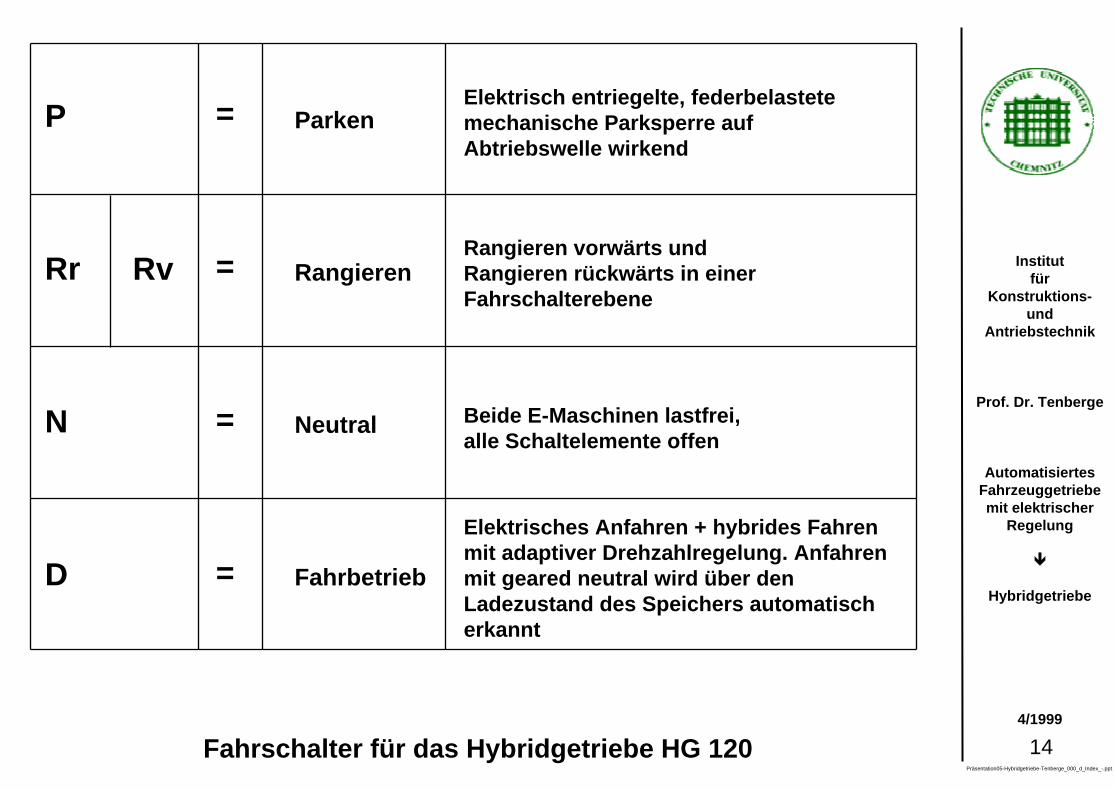
Fahrschalter für das Hybridgetriebe HG 120 14
150
100
50
0
-50
-100
-150
Dre
hmom
ent [
Nm
]
0-2000 2000 4000 6000 0-2000 2000 4000 6000
150
100
50
0
-50
-100
-150
Drehzahl [1/min]
250
50
150
100
Dre
hmom
ent [
Nm
] 200
00 1000 2000 3000 4000 5000 6000 7000
Maschine E1 Maschine E2
Drehzahl [1/min]
Verbrennungsmotor
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
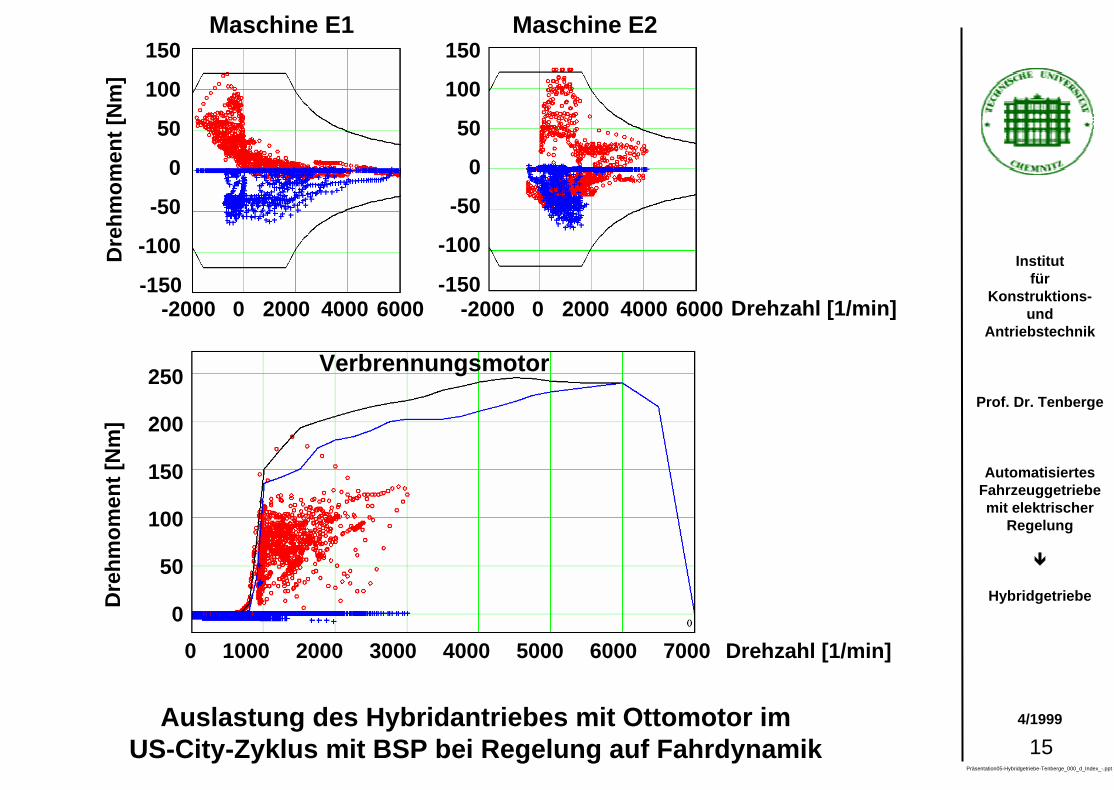
Auslastung des Hybridantriebes mit Ottomotor imUS-City-Zyklus mit BSP bei Regelung auf Fahrdynamik 15
150
100
50
0
-50
-100
-150
Dre
hmom
ent [
Nm
]
0-2000 2000 4000 6000 0-2000 2000 4000 6000
150
100
50
0
-50
-100
-150
Drehzahl [1/min]
250
50
150
100
Dre
hmom
ent [
Nm
] 200
0
0 1000 2000 40003000 5000
Drehzahl [1/min]
Maschine E1 Maschine E2
Verbrennungsmotor
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
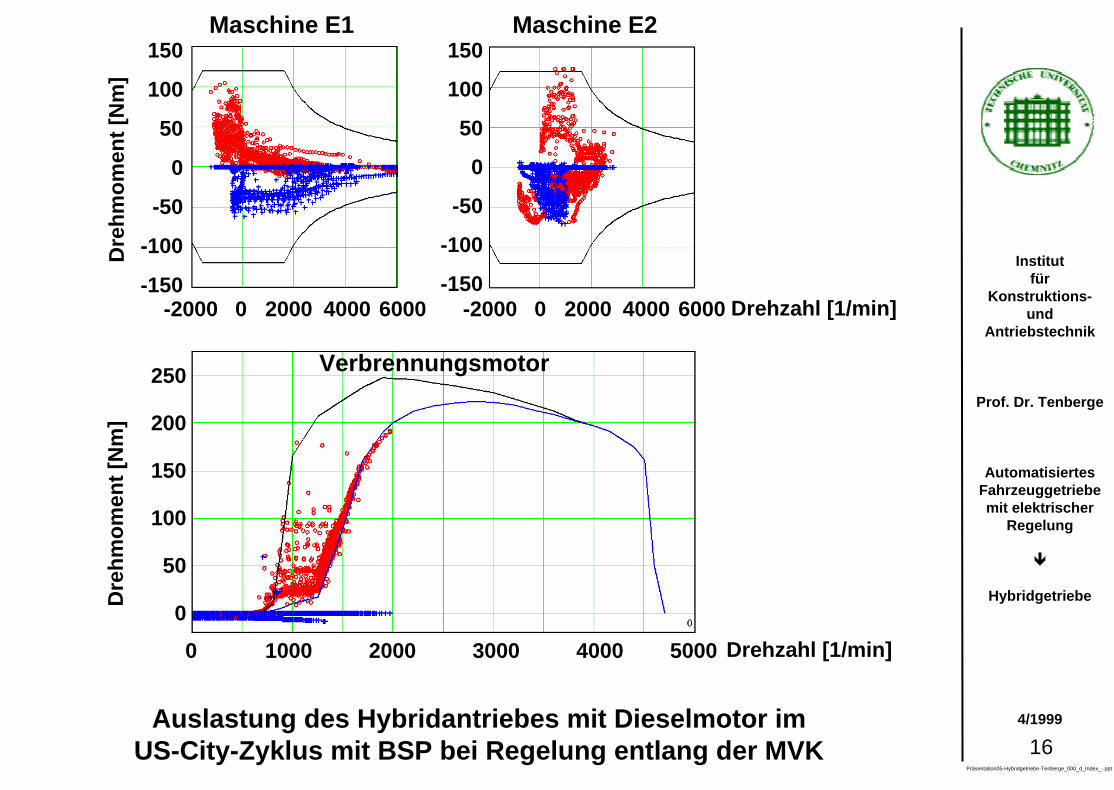
Auslastung des Hybridantriebes mit Dieselmotor imUS-City-Zyklus mit BSP bei Regelung entlang der MVK 16
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
MVK
7,0076,7
24,2
37,4
6,4886,6
11,5
56,8
7,4481,5
25,6
31,0
6,4886,6
9,5
33,7
=
=
=
=
=
8,8797,1
21,2
30,9
6,7990,8
8,0
33,6
0,822°
9,13100,0
21,0
27,3
7,48100,0
8,7
21,0
MVK
4,8882,7
25,0
30,1
4,2292,3
9,5
42,1
5,1386,9
25,2
27,4
4,2693,2
9,3
31,4
5,90100,0
21,0
25,1
4,4697,6
7,8
31,3
0,692°
5,90100,0
21,0
25,1
4,57100,0
7,7
27,8
imin
Bremsenergie-speicherung
Regelung entlang
Verbr. [L/100 km]
rel. Verbrauch [%]
TE1 eff. [Nm]
TE2 eff. [Nm]
Verbr. [L/100 km]
rel. Verbrauch [%]
TE1 eff. [Nm]
TE2 eff. [Nm]
Fahrzeugdaten:
Motor:
MVK minus Dynamikleistung
keine BSP mit BSP keine BSP mit BSP
0,45
Fahrzeugmasse
Luftwiderstandsfläche
dyn. Reifenhalbmesser
Zusatzmasse Batterie (1 kWh)
Zusatzmasse Leistungssteuerung
1475 kg
0,63 m2
US-City-Zyklus
US-Highway-Zyklus
0,45
MVK minus Dynamikleistung
299 mm
30 kg
30 kg
stufenloseBetriebsweisedes Getriebes
Pmax
Tmax
beminρ(Kraftstoff)
Vmax
iAchs
nabmax
235 Nm bei 1900/min
6000/min
3,497 3,491
7300/min
245 Nm bei 4500/min
247 g/kWh
730 kg/m3
236 km/h
Dieselmotor
81 kW bei 4150/min
Ottomotor
150 kW bei 6000/min
191 km/h830 kg/m3
198 g/kWh
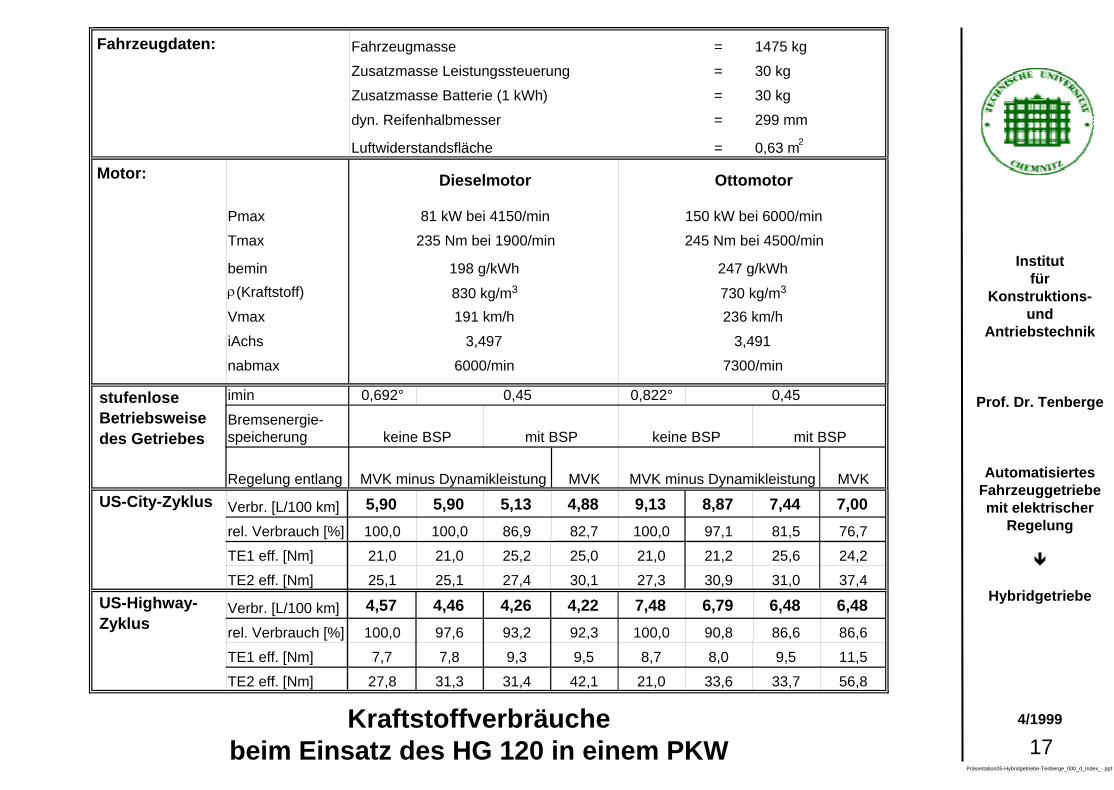
Kraftstoffverbräuchebeim Einsatz des HG 120 in einem PKW 17
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
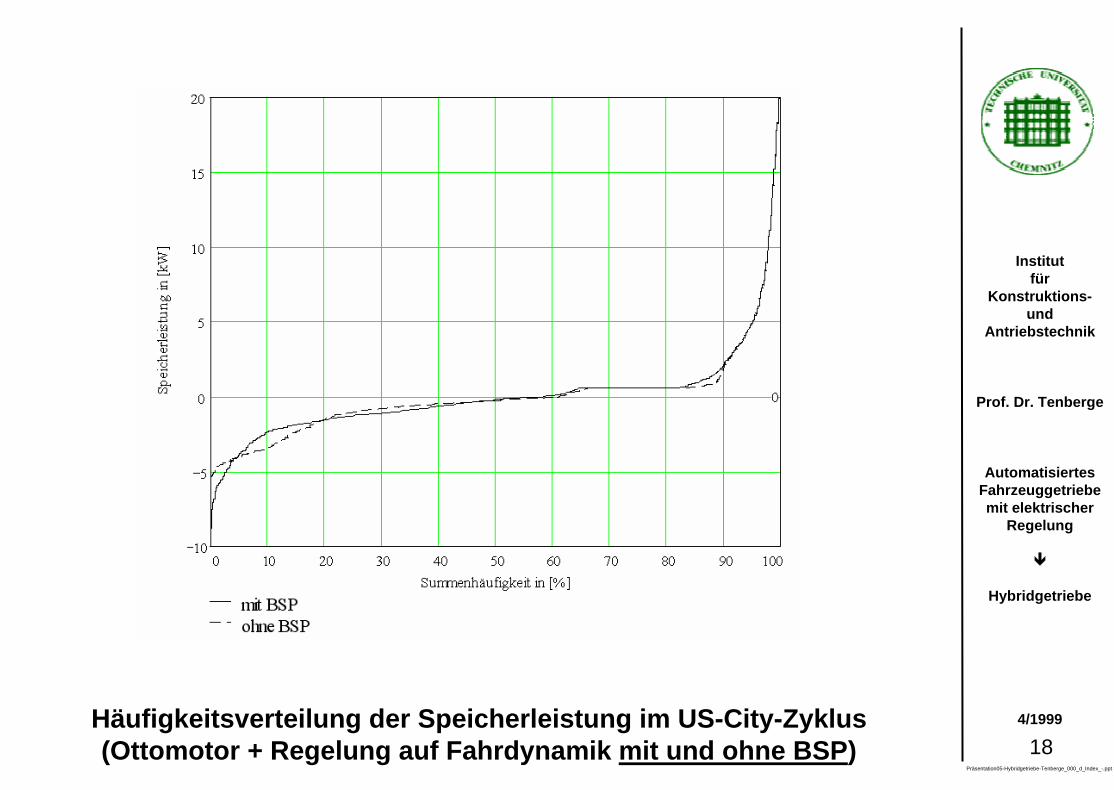
Häufigkeitsverteilung der Speicherleistung im US-City-Zyklus(Ottomotor + Regelung auf Fahrdynamik mit und ohne BSP) 18
Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt
Leistung wird zu ca. 85% rein mechanisch über Zahnräder übertragenhoher Wirkungsgrad
Trotzdem wenig Zahnräder und wenige, einfache SchaltelementeElektrisches Stellgetriebe anstelle von Anfahrelement, Synchronisierung, Variator
wettbewerbsfähiges Gewicht, Bauraum
Großer Stellbereich ∞ > i > 0,45 ohne Schaltungen stufenlos durchfahrbarFeste Übersetzungen i° = 2 / 1,35 / 1 / 0,57 schaltbar
2 Bremsen nur beim Anfahren unter Vollast erforderlich
Drehmomentwandlung beim Anfahren und Boostereffekt durchAddition der Momente von V-Motor und E-Maschinen
Getriebe auch mit herkömmlicher Starterbatterie funktionsfähigAnfahren dann über geared-neutral
Bremsenergierekuperation und Start/Stopp-Funktion erfordert zusätzlichen Speicherzusätzlicher Minderverbrauch
reiner E-Betrieb möglich
Hybridgetriebe sehr gut geeignet in Verbindung mit Brennstoffzellenantrieb
19Zusammenfassung der Eigenschaften des HG 120

Institutfür
Konstruktions-und
Antriebstechnik
Prof. Dr. Tenberge
AutomatisiertesFahrzeuggetriebemit elektrischer
Regelung
Hybridgetriebe
4/1999
Präsentation05-Hybridgetriebe-Tenberge_000_d_Index_-.ppt

























![Literaturverzeichnis3A978-3-663... · 2017. 8. 27. · Fahrzeuggetriebe; Grundlagen, Auswahl, Auslegung und Konstruktion Berlin, Heidelberg: Springer, 1994 [5-18] MAN Nutzfahrzeuge](https://img.pdfslide.tips/doc/110x75/60e1c36e186a760c3f722a82/literaturverzeichnis-3a978-3-663-2017-8-27-fahrzeuggetriebe-grundlagen.jpg)