Embed Size (px)
DESCRIPTION
ok
Citation preview

BAB I
PENDAHULUAN
1.1. Tujuan Percobaan
Untuk mengetahui cara kerja PCT 40 Level Control.
Mengetahui pengendalian dengan metode direct action dan reverse action.
Mempelajari sistem kontrol level mode on/off dengan menggunakan solenoid valve (sol
1)
Mempelajari karakter kerja float switch sensor.
Mempelajari karakter kerja differential level switch sensor.
Mempelajari karakter proportional pressure sensor pada control level dengan mode
on/off.
Mempelajari karakter proportional pressure sensor pada control level dengan mode PID
Mempelajari karakter kerja PSV untuk kontrol level pada mode kontrol manual
1.2. Dasar Teori
1.2.1. Pengendalian Sistem Proses
Sistem proses adalah rangkaian operasi yang menangani konversi material dan
atau energi sehingga material dan atau energi itu berada dalam keadaan yang diinginkan.
Keadaan itu dapat berupa besaran fisika atau kimia, seperti suhu, tekanan, laju alir, level,
komposisi, pH dan lain sebagainya, Disini pengertian sistem proses sudah mencakup
bahan dan alir proses beserta peralatannya. Sengaja tidak membedakan sistem proses dan
pemroses. Sebab kata sistem mengandung pengertian seluruh komponen yang terlibat
dalam suatu proses.
1.2.2. Jenis Variabel
Jenis variabel yang mendapatkan perhatian penting dalam bidang pengendalian
proses adalah variabel proses (process variable, PV) atau disebut juga variabel terkendali
(controlled variable). Variabel proses adalah besaran fisik atau kimia yang menunjukkan
keadaan proses. Variabel ini bersifat dinamik artinya nilai variabel dapat berubah spontan
atau oleh sebab lain baik yang diketahui maupun tidak. Diantara banyak macam variabel

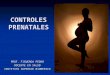
Variabel termanipulasi
Gangguan terukur
Variabel tak terukur
Variabel terkendali
SistemProses
Variabel tak terkendali
proses , terdapat empat macam variabel dasar, yaitu : suhu (T), tekanan (P), laju alir (F)
dan tinggi permukaan cairan (L).
Dalam teknik pengendalian proses , titik berat permasalahan adalah menjaga agar
nilai variabel proses tetap atau berubah mengikuti alur (trayektori) tertentu. Variabel yang
digunakan untuk melakukan koreksi atau mengendalikan variabel proses disebut variabel
termanipulasi (manipulated variable, MV) atau variabel pengendali. Sedang nilai yang
diinginkan dan dijadikan acuan atau referensi variabel proses disebut nilai acuan (setpoint
value, SV). Selain ketiga jenis variabel tersebut masih terdapat variabel lain yaitu
gangguan (disturbance) baik yang terukur (measured disturbance) maupun tidak terukur
(unmeasured disturbance) dan variabel keluaran tak terkendali (uncontrolled output
variable). Variabel gangguan adalah variabel masukan yang mampu mempengaruhi nilai
variabel proses, tetapi tidak digunakan untuk mengendalikan. Variabel keluaran tak
terkendali adalah variabel keluaran yang tidak dikendalikan secara langsung.
Gambar 1.1 Jenis variabel dalam sistem proses
Sebagai contoh proses destilasi fraksionasi dalam kolom piring memiliki jenis
variabel sebagai berikut :
- Gangguan terukur : laju alir umpan
- Gangguan tak terukur : komposisi umpan
- Variabel termanipulasi : - laju refluks
- laju kalor ke pendidih ulang
- laju destilat
- laju produk bawah
- laju alir pendingin
- Variabel terkendali : - komposisi destilat

- komposisi produk bawah
- tinggi permukaan akumulator refluks
- tinggi permukaan kolom bawah
- tekanan kolom
- Variabel tak terkendali : suhu tiap piring sepanjang kolom
1.2.3. Jenis Sistem Pengendalian
Pengendalian proses adalah bagian dari pengendalian automatik yang diterapkan
di bidang teknologi proses untuk menjaga kondisi proses agar sesuai yang diinginkan.
Seluruh komponen yang terlibat dalam pengendalian proses disebut sistem pengendalian
atau sistem kontrol.
a. Sistem Pengendalian Simpal terbuka dan Tertutup
Berdasarkan atas ada atau tidak adanya umpan balik, sistem pengendalian
dibedakan atas sistem pengendalian simpal terbuka (open – loop control system) dan
sistem pengendalian simpal tertutup (closed loop control system).
Sistem pengendalian simpal terbuka bekerja tanpa membandingkan variabel
proses yang dihasilkan dengan nilai acuan yang diinginkan. Sistem ini bekerja semata –
mata bekerja atas dasar masukan yang telah dikalibrasi. Sebagai contoh sederhana adalah
keran air yang terkalibrasi. Dengan memandang keran sebagai suatu sistem, maka bukaan
keran (sudut putaran keran) adalah sebagai masukan dan laju alir air sebagai keluaran
sistem. Berdasarkan hukum dinamika fluida, laju air tergantung pada beda tekanan yang
melintas keran. Misal pada posisi keran X1 dengan beda tekanan P2 mengalir air pada
laju Q2 (gambar 2.2). Jika oleh sebab tertentu tiba – tiba beda tekanan berubah menjadi
P1, maka posisi keran tetap X1 dan menghasilkan laju alir Q1. Dengan demikian sistem
pengendalian simpal terbuka tidak dapat mengatasi perubahan beban atau gangguan yang
terjadi.
Meskipun dari uraian di atas, sistem simpal terbuka merupakan sistem yang
buruk, karena tidak mampu mengatasi gangguan, tetapi memiliki keuntungan sebagai
berikut :
Lebih murah dan sederhana dibandingkan sistem simpal tertutup
Jika sistem mampu mencapai kestabilan sendiri, maka akan tetap stabil

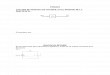
Q2
Q1
Q3
X1
P1
P2
P3
X QKeran air
terkalibrasi
Untuk mengatasi kekurangan sistem simpal terbuka , operator pabrik akan
mengatur kembali besarnya gangguan agar diperoleh sasaran yang diinginkan. Tetapi
dengan tinadakan operator ini berarti telah membuat sistem simpal tertutup.Berbeda
dengan sistem simpal terbuka , pada sistem pengendalian simpal tertutup terdapat
tindakan membandingkan nilai variabel proses dengan nilai acuan yang diinginkan.
Perbedaan ini digunakan untuk melakukan koreksi sedemikian rupa sehingga nilai
variabel proses sama atau dekat dengan nilai acuan. Dengan demikian terdapat
mekanisme umpan balik. Sehingga sistem pengendalian simpal tertutup lebih dikenal
dengan sistem pengendalian umpan balik.
Gambar 1.2 Sistem Pengendalian Simpal Terbuka
Meskipun sistem simpal tertutup mampu mengatasi gangguan atau perubahan
beban tetapi memiliki kelemahan sebagai berikut :
Lebih mahal dan kompleks dibanding sistem simpal terbuka
Dapat membuat sistem tidak stabil, meskipun sebenarnya tanpa umpan balik sistem
dapat mencapai kestabilan sendiri.
keran

b. Sistem Pengaturan dan Pengendalian
Berdasarkan nilai acuan, sistem pengendalian umpan balik dibedakan atas dua
jenis yaitu sistem pengendalian dengan nilai acuan tetap (dibidang elektro sering disebut
sistem pengaturan) dan sistem pengendalian dengan nilai acuan berubah (dibidang
mekanik sering disebut sistem pengendalian, sistem servo atau tracking). Tujuan utama
sistem pengaturan adalah mempertahankan agar nilai variabel proses tetap pada nilai
yang diinginkan. Sedangkan pada sistem pengendalian, tujuan utamanya adalah
mempertahankan agar nilai variabel proses mengikuti perubahan nilai acuan.
Di bidang teknologi proses termasuk teknik kimia, meskipun hampir semuanya
bekerja dengan titik acuan tetap tetapi lebih populer dengan istilah sistem pengendalian
dan bukan sistem pengaturan. Hal ini disebabkan karena istilah pengendalian lebih
mencerminkan kondisi dinamik.
c. Sistem Pengendalian Umpan balik
Prinsip mekanisme kerja sistem pengendalian umpan balik adalah mengukur
variabel proses dan kemudian melakukan koreksi bila nilainya tidak sesuai dengan yang
diinginkan. Ciri utama pengendalian umpan balik negatif. Artinya jika nilai variabel
proses berubah terdapat umpan balik yang melakukan tindakan untuk memperkecil
perubahan itu.
1.2.4 Langkah pengendalian
Langkah – langkah pengendalian adalah sebagai berikut :
a. Mengukur
Tahap pertama dari langkah pengendalian adalah mengukur atau mengamati nilai
variabel proses
b. Membandingkan
Hasil pengukuran atau pengamatan variabel proses (nilai terukur) dibandingkan dengan
nilai acuan (setpoint)
c. Mengevaluasi
Perbedaan antara nilai terukur dan nilai acuan dievaluasi untuk menentukan langkah
atau cara melakukan koreksi atas perbedaan itu

d. Mengoreksi
Tahap ini bertugas melakukan koreksi variabel proses agar perbedaan nilai terukur dan
nilai acuan tidak ada atau sekecil mungkin.
1.2.5. Armfield PCT 40
Armfield PCT 40 merupakan salah satu alat kontrol yang memberikan cara efekif
biaya mengajarkan berbagai teknik kontrol proses dalam sebuah unit dasar yang
sederhana lebih lanjut aspek kontrol proses dapat diatasi dengan menambahkan opsional
untik sistem dasar. Suatu sistem pengendalian proses dengan pengajaran multifungsi,
yang mampu menunjukkan level, aliran, tekanan dan suhu.
Untuk jenis sensor level, dimana tangki sebagai sistem proses dan terdapat katup
pengendali yang bentuknya berupa selenoid (SOL). Pada sensor level ini terdapat 3 buah
SOL, yang berfungsi :
1. SOL 1 : untuk mengatur/mengendalikan jumlah aliran masuk
2. SOL 2 : untuk mengatur/mengendalikan jumlah aliran keluar
Dimana dibagi menjadi 3 modul yaitu PCT 40 yang digunakan untuk level, PCT
41 yang digunakan untuk temperatur dan PCT 42 untuk pH dan konduktivitas.
Sedangkan pada praktikum ini digunakan PCT 40 yaitu untuk pengukuran level suatu
proses dimana menggunakan sensor level yaitu diferential level, level (float) switch dan
tekanan.
1.2.6 Jenis Sensor yang digunakan pada alat ini
1. Floating Switch Level
Sensor ini bekerja berdasarkan pelampung yang terdapat dalam tangki. Cara
kerjanya adalah pada saat sistem membuka (SOL 1=1), maka ketinggian (level) air dalam
tangki akan bertambah. Jika ketinggian air telah mengenai pelampung yang
menyebabkan pelampung tersebut tenggelam hingga batas tertentu maka sistem dengan
sendirinya akan mati dan SOL akan menutup (SOL 1=0) sebagai nilai ofset atas
begitupun sebaliknya jika fluida dalam tangki berkurang dan membuat pelampung
tersebut turun hingga batasan tertentu maka sistem akan membuka kembali (SOL 1=1).

Sensor ini bekerja dengan sistem ON-OFF (buka-tutup), dimana Set Point akan
sama dengan ofset bawah yaitu pada saat sistem membuka (SOL 1=1). Pada saat sistem
menutup maka sensor ini akan bekerja secara buka-tutup untuk menstabilkan ketinggian
air yang ada dalam tangki. Sensor floating switch ini merupakan jenis sensor yang paling
sederhana dari sensor level namun memiliki offset dan respon yang paling cepat
dibanding sensor level yang ada pada alat PCT 40.
2. Differential Level
Sensor ini bekerja dengan membedakan batas atas dan batas bawah. Cara kerja dari
sensor ini adalah elektroda negatif dipasang lebih rendah dari elektroda positif sehingga
jika fluida diisi kedalam tangki maka elektroda negatif akan tersentuh fluida tersebut
lebih dulu dan membuat larutan memiliki muatan listrik dan ketika larutan menyentuh
elektroda positif maka sistem akan mati dengan sendirinya. Sensor ini memiliki ofset
yang lebih kecil dari pressure control dan respon yang lebih cepat namun sangat
berbahaya untuk cairan yang mudah terbakar karena sensor ini bekerja dengan adanya
loncatan elektron
Batas bawah pada sensor ini berfungsi sebagai emergency switch, yaitu seandainya
jika sistem membuka hingga air mencapai batas atas, namun selenoid tidak bekerja maka
selambat-lambatnya pada batas bawah selenoid harus bekerja sebelum ditinggalkan oleh
cairan (air). Sensor jenis ini juga bekerja dengan sistem ON-OFF, dimana nilai Set Point
akan sama dengan ofset bawah (SOL 1=1)
3. Pressure Sensor
Sensor ini bisa bekerja dengan sistem ON-OFF (0 dan 100) maupun sistem PSV (0-
100) serta nilai Set Point (SP) dapat ditentukan sesuai dengan keinginan. Cara kerja
sensor pressure adalah mengukur ketinggian cairan pada tangki berdasarkan tekanan yang
diberikan oleh cairan dalam tangki namun sensor ini memiliki offset yang besar dan
respon lambat.
Hal pertama yang dilakukan untuk memperoleh data dari tiap-tiap jenis sensor
tersebut adalah dengan cara mengkalibrasi alat sensor flow untuk mengetahui seberapa
besar kesalahan dan error yang dipunya. Alat tersebut harus disetting hingga laju alir

1400 mL/menit sesuai dengan spesifikasi alat dengan range laju alir 1400-1500
mL/menit.
Kalibrasi sensor flow dilakukan secara manual dengan cara memutar regulator
dengan cara menarik regulator keluar terlebih dahulu baru kemudian memutarnya hingga
diperoleh laju alir yang diinginkan (1400-1500 mL/menit). Setelah itu, menekan regulator
tersebut kedalam dengan tujuan untuk mengunci agar aliran yang masuk agar tidak
melebihi laju alir yang telah ditentukan. Jika kalibrasi telah selesai dilakukan, maka
proses untuk sensor level sudah bisa dilakukan.
1.2.7 Instrumentasi proses
Pelaksanaan keempat langkah pengendalian seperti yang telah dijelaskan pada
point 2.4 memerlukan instrumentasi berikut :
a. Unit Pengukuran
Bagian ini bertugas mengubah nilai variabel proses yang berupa besaran fisik atau
kimia seperti laju alir, tekanan, suhu, pH, konsentrasi dan sebagainya menjadi sinyal
standar. Bentuk sinyal standar yang populer di bidang pengendalian proses adalah berupa
sinyal pneumatik (tekanan udara) dan sinyal listrik. Unit pengukuran terdiri atas dua
bagian besar yaitu :
1. Sensor yaitu elemen perasa yang langsung bersentuhan dengan variabel proses
2. Transmiter yaitu bagian yang berfungsi mengubah sinyal dari sensor (gerakan
mekanik, perubahan hambatan, perunahan tegangan atau arus) menjadi sinyal standar.
Dalam bidang pengendalian proses, istilah transmiter lebih populer dibandingkan
dengan tranduser. Meskipun keduanya berfungsi serupa, tetapi transmiter mempunyai
makna pengirim sinyal pengukuran ke unit pengendali yang biasanya terletak jauh dari
tempat pengukuran, ini lebih sesuai dengan keadaan sebenarnya di pabrik.
b. Unit Pengendali
Bagian ini bertugas membandingkan, mengevaluasi, dan mengirimkan sinyal ke
unit kendali akhir. Evaluasi yang dilakukan berupa operasi matematika seperti
penjumlahan, pengurangan, perkalian, pembagian , integrasi dan diferensiasi. Hasil
evaluasi berupa sinyalkendali yang dikirim ke unit kendali akhir. Sinyal kendali berupa
sinyal standar yang serupa dengan sinyal pengukuran.

keranSudutputar
lajuair
sistemmasukan keluaran
c. Unit kendali akhir
Bagian ini bertugas menerjemahkan sinyal kendali menjadi aksi atau tindakan
koreksi melalui pengaturan variabel termanipulasi. Unit ini terdiri atas dua bagian besar,
yaitu aktuator dan elemen kendali akhir. Aktuator adalah penggerak elemen kendali
akhir. Bagian ini dapat berupa motor listrik, solenoida dan membran pneumatik.
Sedangkan elemen kendali akhir biasanya berupa katup kendali (control valve) atau
elemen pemanas.
1.2.8 Diagram blok
Penggambaran suatu sistem atau komponen dari sistem dapat berbentuk blok
(kotak) yang dilengkapi dengan garis sinyal masuk dan keluar. Sinyal dapat berupa arus
listrik, tegangan (voltase), tekanan, aliran cairan, tekanan cairan, suhu, pH, kecepatan,
posisi dan sebagainya. Sinyal yang perlu digambarkan hanyalah sinyal masuk dan sinyal
keluar yang secara langsung berperan dalam sistem. Sedangkan sumber energi atau massa
yang masuk biasanya tidak digambarkan.
Sebagai contoh , keran air yang dipakai mengalirkan air dari tangki , cadangan air
sebagai sumber massa, sinyal masukan adalah sudut putar keran (posisi bukaan keran),
sinyal keluaran adalah laju alir air. Disini yang perlu digambarkan adalah sudut putar
(posisi bukaan keran) dan laju alir air.Sedangkan cadangan air tidak perlu digambarkan.
Gambar 1.3 Diagram blok pengaturan laju air dengan keran

Termometer raksa
Suhuteganga
n
tinggi
raksa
Transmiter tekanan
Suhutekanan
Aruslistrik
Suhu Termokopel
Penukarpanas
Aliranpemanas
Sistem proses
Pemanas air
Variabel termanipulasi (S) Variabel
proses (T)
Gangguan (P)
Gambar 1.4 diagram blok sistem
Berikut ini disajikan contoh diagram blok sistem
Gambar 1.5 Beberapa diagram blok system
Diagram Blok Sistem Pengendalian
Dengan meninjau alat penukar panas (dari contoh di atas) sebagai suatu sistem,
maka dapat dibuat diagram blok sebagai berikut :
Gambar 1.6 Diagram Blok Sistem Pemanas Air
Diagram blok umum sistem proses ditunjukkan oleh gambar (2.8) . Dalam
diagram tersebut masukan sistem terdiri atas variabel termanipulasi (M) dan gangguan

Sistem proses
M
W
C
Ce U M+
W-
y-
r+
H
GC GV GP
(W). Tanda bulat yang menjadi titik temu keduanya adalah simbol penjumlahan
Gambar 1.7 diagram blok umum sistem proses
Keterangan :
M = variabel termanipulasi (MV)
W = variabel gangguan
C = variabel proses (PV)
Diagram blok lengkap sistem pengendalian proses pemanasan digambarkan
sebagai berikut :
Keterangan gambar :
r+ = nilai acuan atau setpoint value (SV)
e = sinyal galat (error) dengan e = r –y
y = sinyal pengukuran
u = sinyal kendali
M+ = variabel termanipulasi
W- = variabel gangguan
C = variabel proses
GC = unit pengendali
GV = katub pengendali
GP = sistem proses
H = transmiter

GC GPr u
w
y
W
SISTEM PENGENDALIAN
r
y
Untuk keperluan praktis , diagram tersebut sering disederhanakan dengan
meniadakan blok katup kendali dan transmiter. Hal ini disebabkan karena sinyal kendali
(u) pada dasarnya mempresentasikan nilai variabel termanipulasi sedangkan sinyal
pengukuran (y) mempresentasikan nilai variabel proses. Sehingga dalam diagram blok
sistem pengendalian pada gambar berikut, sinyal kendali (u) sebagai variabel
termanipulasi (MV).
Gambar 1.8 diagram blok singkat sistem pengendalian
Tanggapan transien sistem tertutup
Sistem pengendalian dapat lebih disederhanakan, yaitu dengan memandang
sistem sebagai suatu blok dengan dua masukan (r dan w) dan satu keluaran (y)
Gambar 1.9 Penyederhanaan sistem pengendalian sebagai satu blok
Jika ke dalam sistem pengendalian terjadi perubahan nilai acuan, idealnya nilai
variabel proses dapat mengikuti nilai acuan baru. Tetapi kondisi demikian biasanya tidak
terjadi. Nilai variabel proses akan mengalami beberapa kemungkinan perubahan yaitu :
Tanpa osilasi (overdamped)
Osilasi teredam (underdamped)
Osilasi kontinyu (sustained oscillation)
Tidak stabil (amplitudo membesar)

yy
y
Keempat tanggapan di atas dibuat dengan memberi masukan berupa step function
yaitu dengan perubahan mendadak dari satu nilai masukan konstan ke nilai masukan
konstan yang lain. Besarnya perubahan tersebut biasanya paling besar 10 %.
Tanggapan tanpa osilasi bersifat lambat namun stabil. Sedangkan tanggapan
osilasi teredam memiliki sedikit gelombang di awal perubahan, dan selanjutnya
amplitudo mengecil dan akhirnya hilang. Tanggapan ini cukup cepat meskipun sedikit
terjadi kestabilan. Pada tanggapan dengan osilasi kontinyu variabel proses secara terus
menerus bergelombang dengan amplitudo dan frekuensi yang tetap. Terakhir tanggapan
tidak stabil, memiliki amplitudo membesar. Kondisi demikian sangat berbahaya karena
dapat merusak sistem keseluruhan.
Gambar 1.10 Tanggapan sistem pengendalian simpal tertutup pada perubahan nilai acuan
Dari keempat kemungkinan tadi yang paling dihindari bahkan sama sekali tidak
boleh terjadi adalah tanggapan tidak stabil dengan amplitudo membesar. Sedangkan
tanggapan osilasi kontinyu dalam beberapa hal masih bisa diterima , meskipun cukup
berbahaya. Sekedar perhatian untuk praktisi industri , meskipun variabel proses secara
terus menerus terlihat berayun seperti mengalami osilasi kontinyu, tetapi belum tentu
benar-benar terjadi osilasi dalam sistem pengendalian . Boleh jadi kondisi demikian
memang sifat variabel itu sendiri, misalnya aliran gas atau turbulensi fluida.
1.2.9 Model-model pegendalian
a. Pengendalian Proportional
Pengendalian proportional menghasilkan sinyal kendali yang besarnya sebanding
dengan sinyal galat (error). Sehingga terdapat hubungan tetap dan lancar antara variabel
Osilasi kontinyu ( ζ = 1)
Tanggapan teredam ( ζ > 1) Tanggapan osilasi teredam ( 0 < ζ < 1)
Tak stabil ( ζ < 0)

proses (PV) dan posisi elemen kendali akhir. Gain pengendali proportional adalah
perubahan posisi katub dibagi dengan perubahan tekanan. Di kalangan praktisi industri
besaran gain kurang populer. Sebagai gantinya dipakai besaran Proportional Band (PB)
yaitu perubahan galat / variabel proses yang dapat menghasilkan perubahan sinyal
kendali sebesar 100%. Besaran ini lebih mencerminkan kebutuhan pengendalian
dibandingkan gain proportional.
Lebar proportional band menentukan kestabilan sistem pengendalian. Semakin
kecil nilai PB pengendali semakin peka (tanggapan semakin cepat). Offset yang terjadi
semakin kecil tetapi sistem menjadi stabil tetapi pengendali tidak peka dan offset besar.
Pada PB sama dengan nol maka perilaku pengendali proportional menjadi sama dengan
pengendali on – off. Satu – satunya problem pengendalian proportional adalah selalu
menghasilkan galat sisa (residual error atau offset) yang disebabkan perubahan beban,
sebab dengan perubahan beban memerlukan nilai sinyal kendali (u) yang berbeda.
Dengan demikian offset memang diperlukan untuk menjaga nilai sinyal kendali baru (u)
yang berbeda dengan Uo, untuk menjaga keseimbangan massa dan atau energi yang baru.
Sifat – sifat pengendalian proportional adalah keluaran sinyal kendali terjadi
seketika tanpa ada pergeseran fase (c=0).
b. Pengendali Proportional Integral (PI)
Penambahan integral pada pengendali proportional dimaksudkan untuk
menghilangkan offset. Mekanismenya mirip dengan kerja operator yaitu dengan
membuat nilai bias baru. Sehingga variabel proses sama dengan nilai acuan untuk
mengulang aksi proportional. Penambahan aksi integral menambah kelambatan dan
ketidakstabilan sistem. Pengaturan waktu integral (T) tergantung pada waktu mati sistem
proses. Waktu integral tidak boleh kecil dibandingkan waktu mati. Jika waktu integral
lebih kecil dari waktu mati, maka keluaran pengendali terlalu cepat berubah dibanding
tanggapan sistem proses. Hal ini mengakibatkan overshoot dan osilasi berlebihan. Sifat –
sifat pengendali proportional integral (PI) adalah :
- Fase sinyal kendali tertinggal terhadap fase sinyal galat
- Tidak terjadi offset
- Tanggapan sistem lebih lambat dan cenderung kurang stabil

c. Pengendali Proportional Integral Derivative (PID)
Kelambatan akibat aksi integral dihilangkan dengan menambahkan aksi derivatif
pada pengendalian PI sehingga menghasilkan jenis pengendalian PID. Aksi derivatif
bertujuan untuk mempercepat tanggapan sekaligus memperkecil overshoot variabel
proses. Namun penambahan derivatif menyebabkan sistem menjadi peka terhadap noise.
Selain itu penambahan aksi derivatif tidak sesuai untuk proses yang memiliki waktu mati
dominan (lebih dari setengah konstanta waktu).
Sifat – sifat pengendali proportional integral derivatif :
- Tidak terjadi offset dan peka terhadap adanya noise
- Tanggapan cepat dan amplitudo osilasi kecil (lebih stabil)

BAB IIMETODOLOGI
2.1 Alat dan Bahan
Alat yang digunakan adalah armfield PCT 40 level control
Bahan yang digunakan adalah air PDAM
2.2 Prosedur Percobaan
2.2.1 Safety (Keamanan Operasi) dan Prosedur Umum
1. Memastikan seluruh sambungan kabel dan unit komputer pengendali bebas dari
genangan air untuk menghindari korslet.
2. Memastikan seluruh valve dalam keadaan tertutup sebelum menyalakan peralatan.
3. Memasang selang air dari valve input ke kran sumber air.
4. Memasang kabel power unit armfield ke komputer dan ke saklar listrik.
5. Memasang kabel USB yang menghubungkan unit armfield dengan komputer.
6. Menyalakan saklar power yang terdapat dibagian belakang unit armfield.
7. Menyalakan saklar power yang terdapat dibagian depan unit armfield.
8. Menyalakan komputer, memilih Start dan mengklik icon Armfield PCT 40.
2.2.2 Prosedur Kerja
Percobaan 1.1: On/off level switch (floating switch)
1. Memasang selang penghubung dari output SOL 1 ke konektor yang terdapat pada
bagian bawah tangki proses
2. Memastikan kran air input sudah dibuka
3. Menjalankan program PCT 40 dan memilih “section 1: Level Control (inflow)”
4. Membuka valve SOL 1 sehingga air mengalir kedalam tangki dengan cara memilih
icon “control” dan memilih mode operasi “manual”, kemudian set ‘manual output’
pada 100% dan click ‘Apply’. Setelah itu tutup screen “PID Controller”
5. Memeriksa flowrate air diantara 350 ml/min – 1450 ml/min dengan mengatur
pressure regulator
6. Memilih icon ‘go’ untuk memulai percobaan

7. Mengamati respon dari float switch saat air telah menyentuh sensor tersebut
8. Mengklik SOL 2 untuk membuka valve tersebut kemudian amati lagi respon dari
float switch
9. Memilih icon “stop” untuk menghentikan record data percobaan
10. Menutup valve SOL 1 dengan memilih icon “control”, mode “off” dan set ‘Manual
Output’ pada 0% dan click ‘Apply’. Setelah itu tutup screen “PID Controller”
11. Membuka grafik dan table data, buat analisa dari kondisi operasi dan data yang di
record selama percobaan
Percobaan 1.2: differential level switch
1. Memasang selang penghubung dari output SOL 1 ke konektor yang terdapat pada
bagian bawah tangki proses
2. Memastikan kran air input sudah dibuka dan men-setting ketinggian elektroda
sensor (catatan: disarankan dimulai dengan posisi elektroda biru 20 mm dari bagian
atas tangki dan elektroda merah 50 mm dari bagian atas tangki)
3. Menjalankan program PCT 40 dan memilih “section 1: Level Control (inflow)”
4. Memilih “differential level”
5. Memilih icon “control” dan memilih mode operasi “otomatic”. Setelah itu tutup
screen “PID Controller”
6. Memeriksa flowrate air diantara 350 ml/min – 1450 ml/min dengan mengatur
pressure regulator
7. Memilih icon ‘go’ untuk memulai percobaan
8. Mengamati respon dari differential sensor saat air telah menyentuh sensor tersebut
9. Mengklik SOL 2 untuk membuka valve tersebut kemudian amati lagi respon dari
differential sensor
10. Memilih icon “stop” untuk menghentikan record data percobaan
11. Menutup valve SOL 1 dengan memilih icon “control” dan “off” kemudian click
‘Apply’. Setelah itu tutup screen “PID Controller”
12. Membuka grafik dan table data, buat analisa dari kondisi operasi dan data yang di
record selama percobaan

Percobaan 1.3: Kontrol on/off pada proportional pressure sensor dengan
menggunakan solenoid valve
1. Memasang selang penghubung dari output SOL 1 ke konektor yang terdapat pada
bagian bawah tangki proses
2. Menjalankan program PCT 40 dan memilih “section 1: Level Control (inflow)”
3. Memilih icon “control” , set Proportional Band (P) pada 0%,Integral Time (I) pada
0s dan Derivative Time (D) pada 0s. masukkan nilai set point pada level 150 mm
kemudian “apply”
4. Memilih icon ‘go’ untuk memulai percobaan
5. Mengamati respon yang terjadi saat set point tercapai
6. Mengubah nilai set point pada level 250 dan amati respon yang terjadi saat set point
tercapai
7. Mengubah kembali set point pada 150 mm, klik SOL 2 untuk membuka valve
tersebut kemudian amati lagi respon dari sensor
8. Melakukan pengamatan ulang pada set point 250 mm
9. Menutup SOL 2. Pilih icon “stop” untuk menghentikan record data percobaan
10. Menutup valve SOL 1 dengan memilih icon “control” dan “off” kemudian click
‘Apply’. Setelah itu tutup screen “PID Controller”
11. Membuka grafik dan table data, buat analisa dari kondisi operasi dan data yang di
record selama percobaan
Percobaan 1.4: Kontrol PID pada Proportional pressure sensor dengan
menggunakan solenoid valve
1. Memasang selang penghubung dari output SOL 1 ke konektor yang terdapat pada
bagian bawah tangki proses
2. Menjalankan program PCT 40 dan memilih “section 1: Level Control (inflow)”
3. Memilih icon “control” , set Proportional Band (P) pada 20%,Integral Time (I) pada
0s dan Derivative Time (D) pada 0s. masukkan nilai set point pada level 150 mm
kemudian “apply”
4. Memilih icon ‘go’ untuk memulai percobaan
5. Mengamati respon yang terjadi saat set point tercapai

6. Memvariasikan nilai Proportional Band (P), Integral Time (I) dan Derivative Time
(D) dan amati respon yang dihasilkan
7. Mengklik SOL 2 untuk membuka valve kemudian masukkan kembali nilai variasi
P, I, D yang digunakan pada langkah 6, kemudian amati lagi respon dari sensor
8. Menutup SOL 2. Pilih icon “stop” untuk menghentikan record data percobaan
9. Menutup valve SOL 1 dengan memilih icon “control” dan “off” kemudian click
‘Apply’. Setelah itu tutup screen “PID Controller”
10. Membuka grafik dan table data, buat analisa dari kondisi operasi dan data yang di
record selama percobaan
Percobaan 2.2: Kontrol level mode PID controller menggunakan PSV
1. Memasang selang penghubung dari output PSV ke konektor yang terdapat pada
bagian bawah tangki proses
2. Menjalankan program PCT 40 dan memilih “section 1: Level Control (outflow)”
3. Memilih ‘Configure’ pada menu “Sample” dan set pada ‘Automatic sampling’
dengan interval 30s dan ‘Continuous duration’
4. Memilih icon “control” , set Proportional Band (P) pada 20%, Integral Time (I)
pada 0s dan Derivative Time (D) pada 0s. masukkan nilai set point pada level 150
mm kemudian “apply”
5. Memilih icon ‘go’ untuk memulai percobaan
6. Mengamati respon yang terjadi saat set point tercapai
7. Memvariasikan nilai Proportional Band (P), Integral Time (I) dan Derivative Time
(D) dan amati respon yang dihasilkan
8. Mengklik SOL 2 untuk membuka valve kemudian masukkan kembali nilai variasi
P, I, D yang digunakan pada langkah 7, kemudian amati lagi respon dari sensor
9. Menutup SOL 2. Pilih icon “stop” untuk menghentikan record data percobaan
10. Menutup valve SOL 1 dengan memilih icon “control” dan “off” kemudian click
‘Apply’. Setelah itu tutup screen “PID Controller”
11. Membuka grafik dan table data, buat analisa dari kondisi operasi dan data yang di
record selama percobaan